
移動体通信システムおよび移動体ならびにそのビームの方向制御方法
【課題】 GPSが使用できず、したがってINSのみによって送信側および受信側移動体間の位置関係を計算しなければならない環境下において、送信側移動体が受信側移動体の方向に的確にビームを照射することが可能な移動体通信システムの提供。
【解決手段】 ペンシルビームを用いて移動体1〜4間で通信を行う移動体通信システムであって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御部24と、受信側移動体が送信ビームを受信し、受信した送信ビームに基づきモノパルス測角を行うモノパルス測角部34と、受信側移動体から送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知部35とを含み、ビーム制御部24は受信側移動体から取得した測角誤差値に基づきペンシルビームの照射方向を補正する。
【解決手段】 ペンシルビームを用いて移動体1〜4間で通信を行う移動体通信システムであって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御部24と、受信側移動体が送信ビームを受信し、受信した送信ビームに基づきモノパルス測角を行うモノパルス測角部34と、受信側移動体から送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知部35とを含み、ビーム制御部24は受信側移動体から取得した測角誤差値に基づきペンシルビームの照射方向を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体通信システムおよび移動体ならびにそのビームの方向制御方法に関し、特にペンシルビームを用いた移動体通信システムおよび移動体ならびにそのビームの方向制御方法に関する。
【背景技術】
【0002】
移動体がペンシルビーム(狭ビーム)を使用してユニット間(peer to peer)通信を行うネットワークは知られている。この種のネットワークを構成するためには、データを送信する移動体(以下、送信側移動体と記す)がデータを受信する移動体(以下、受信側移動体と記す)へ的確にビームを照射する必要がある。
【0003】
そのため、この種のネットワークを実現するための核となる技術は、送信側移動体が受信側移動体へ照射するビームの方向制御である。ここで、ビームの方向制御について簡単に説明する。
【0004】
ビームを受信側移動体へ的確に照射するためには、送信側移動体が受信側移動体の位置をある精度(ビーム幅の中に受信側移動体が入る程度の精度)で知る必要がある。GPS(Global Positioning System)を利用できる環境下では、GPSから得られる位置情報を移動体間で定期的に交換することで、両移動体の位置を正確に知ることができる。
【0005】
送信側移動体は、入手した受信側移動体の位置情報と、GPSから得た自移動体の位置情報および自移動体のINS(Inertial Navigation System)等から得られる自移動体の姿勢、方向情報等を利用して、受信側移動体に照射するビームの方向を制御する。
【0006】
一方、本発明に関連する通信システムの一例として、無線送受信部を有し、相対的に移動する相手方と通信を行う移動無線通信装置において、自己の位置を含む自己情報を相手方に送信する電波通信部と、この電波通信部で送信した自己情報と相手方の位置を含む相手情報とに基づいて、相手方との間に接続されたレーザ通信回線を介して、圧縮されたデータを相手方に向け送信するレーザ通信部とを備えたものが開示されている(特許文献1参照)。また、この移動無線通信装置には、自己の正確な現在位置情報を測定するために、INSあるいはGPSが搭載されていると記載されている。
【0007】
また、他の一例として、滑走路RWYの中央軸上に2個の地上装置を設け、これらの地上装置にそれぞれGPS受信装置を設けて、これらの計測位置を異なる周波数f1,f2で送信する着陸誘導システムが開示されている(特許文献2参照)。
【0008】
また、このシステムでは航空機にもGPS受信機を設け、航空機の位置情報も得る。これら三つの位置情報に基づき、航空機を滑走路RWYの周辺にまで誘導する。そして、ファイナルコースに入ると、滑走路RWYの中央軸両端に設けられたコーナリフレクタA1,A2に対してレーダ波を送出し、この反射波により得られる誤差信号をもとに、航空機の着陸誘導を行う。
【0009】
また、航空機は追尾レーダ部を有し、追尾レーダ部はコーナリフレクタA1に対しレーダ波を送出し、その反射信号に対してモノパルス測角処理を行うことが記載されている。
【0010】
さらに、他の一例として、複数の無線局を備え、各無線局間で無線通信を行う無線ネットワークにおける無線局の方位角測定方法において、複数の無線局のうちのサービスエリア内の各無線局に対する、所定の方位角毎の、受信電界強度、受信信号対干渉雑音比または搬送波対干渉雑音比である信号測定値を予め測定して信号測定値テーブルとして記憶装置に記憶する第1のステップと、各無線局からの送信信号を、信号測定値テーブルにおける最大値の信号測定値を有する方位角の主ビームのセクタパターンを含む互いに隣接する少なくとも2つのセクタパターンを用いてそれぞれ受信電界強度を測定し、測定した各受信電界強度に基づいて、モノパルス測角処理を用いて、予め測定された2つのセクタパターンの差パターンをその和パターンで除算した商パターンを2つのセクタパターンの主ビームの方位角度で直線近似して最大の受信電界強度を有する、送信信号を送信した無線局の方位角を計算する第2のステップとを含む発明が開示されている(特許文献3参照)。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2001−44941号公報
【特許文献2】特開平11−345400号公報
【特許文献3】特開2004−266523号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかし、GPSの電波は微弱であるため、妨害が容易である。GPSが妨害を受けると、GPSから自移動体の位置情報を得ることはできない。一方、GPSの代替案として、移動体内に装備されているINSから自移動体の位置情報を取得する方法がある。
【0013】
INSはジャイロと加速度計とから構成され、出発地点からの自移動体の姿勢方位および自己位置情報を一定時間毎に自移動体に報告するものであるが、その自己位置情報は時間の経過により誤差が蓄積する。このため、INSから入手する自移動体の姿勢方位情報と現実の自移動体の姿勢方位情報との差分は、時間の経過と共に大きくなる。したがって、INSから常時必要な位置精度で自移動体の指向方向情報を得ることも困難である。このため、送信側移動体は受信側移動体へ的確にビームを照射することができないという課題がある。
【0014】
一方、特許文献1に記載の技術は、INSおよびGPSを用いて自己の位置を測定し、その情報を相手方と交換することにより、相手方通信装置の方向を特定するものである。しかし、たとえINSが使用できたとしてもGPSが使用できない場合にいかにして相手方通信装置の存在する方向を特定するかについては特許文献1に全く記載されていない。したがって、特許文献1記載の技術によって本発明の課題を解決することはできない。
【0015】
また、特許文献2に記載の技術は、2個の地上装置および航空機にGPS受信機を設け、各々の位置を計測することをベースとする点で本発明と構成が全く異なる。また、モノパルス測角処理を行う点が記載されているものの、移動体対移動体の測角処理ではなく、航空機対滑走路のコーナリフレクタA1,A2の測角処理である点で本発明と構成が異なり、さらに、その測角処理は相手方から送信されるビームの方向の誤差を測定するためのものではなく、航空機が滑走路へ進入する角度を算出するためのものである点で本発明と目的が異なる。したがって、特許文献2記載の技術によって本発明の課題を解決することはできない。
【0016】
また、特許文献3に記載の技術は、モノパルス測角処理を用いて送信信号を送信した無線局の方位角を計算する視点が開示されている点で本発明と共通する。しかし、特許文献3に開示されているのは無線局の方位角を計算するまでの技術に止まり、その方位角の計算結果をいかに利用するかについては全く記載されていない。
【0017】
すなわち、特許文献3に開示の発明は相手方無線局に方位角の計算結果(すなわち、ビーム方位角の誤差値)を通知するという構成を有しない。つまり、特許文献3に開示の発明は相手方無線局に方位角の計算結果を通知することを目的としないため、その目的が本発明と全く異なり、その目的達成のための構成も本発明と全く異なる。したがって、特許文献3記載の技術によって本発明の課題を解決することはできない。
【0018】
そこで、本発明の目的は、GPSが使用できず、したがってINSのみによって送信側および受信側移動体間の位置関係を演算しなければならない環境下において、送信側移動体が受信側移動体の方向に的確にビームを照射することが可能な移動体通信システムおよび移動体ならびにビームの方向制御方法を提供することにある。
【課題を解決するための手段】
【0019】
前記課題を解決するために、本発明による移動体通信システムは、ペンシルビームを用いて移動体間で通信を行う移動体通信システムであって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御手段と、前記受信側移動体が前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角手段と、前記受信側移動体から前記送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知手段とを含み、前記ビーム制御手段は、前記受信側移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とする。
【0020】
また、本発明による移動体は、ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおける移動体であって、自移動体に設けられ、相手方移動体の方向に送信ビームを送信するビーム送信手段と、前記相手方移動体に設けられ、前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角手段と、前記相手方移動体に設けられ、前記自移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知手段とを含み、前記ビーム送信手段は、前記相手方移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とする。
【0021】
また、本発明によるビームの方向制御方法は、ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおけるビームの方向制御方法であって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御ステップと、前記受信側移動体が前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角ステップと、前記受信側移動体から前記送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知ステップとを含み、前記ビーム制御ステップは、前記受信側移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とする。
【0022】
また、本発明によるプログラムは、ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおけるビームの方向制御方法を、コンピュータに実行させるためのプログラムであって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御ステップと、前記受信側移動体が前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角ステップと、前記受信側移動体から前記送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知ステップとを含み、前記ビーム制御ステップは、前記受信側移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とする。
【発明の効果】
【0023】
本発明によれば、GPSが使用できず、したがってINSのみによって送信側および受信側移動体間の位置関係を計算しなければならない環境下において、送信側移動体が受信側移動体の方向に的確にビームを照射することが可能となる。
【図面の簡単な説明】
【0024】
【図1】本発明に係る移動体通信システムの一例の構成図である。
【図2】本発明に係る移動体1〜4の構成の一例を示す図である。
【図3】送信部の構成の一例を示す図である。
【図4】受信部の構成の一例を示す図である。
【図5】図4の受信部32に含まれる合成回路32Aの一例の構成図である。
【図6】本発明に係るビームの方向制御方法の動作の一例を示すフローチャートである。
【図7】本発明に係るビームの方向制御方法におけるモノパルス測角の具体例を示す図である。
【図8】受信側移動体でのモノパルス測角の一例を示すモノパルスのビームパターン図である。
【図9】移動体のINS17における相対的な指向方向誤差の一例を示す図である。
【図10】第3実施形態における送信部の構成図である。
【図11】第3実施形態の動作の一例を示す図である。
【図12】第3実施形態の動作の一例を示す図である。
【図13】第4実施形態における送信部の構成図である。
【図14】第5実施形態における送信部の構成図である。
【図15】第6実施形態の動作を示すフローチャートである。
【発明を実施するための形態】
【0025】
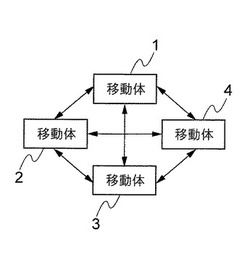
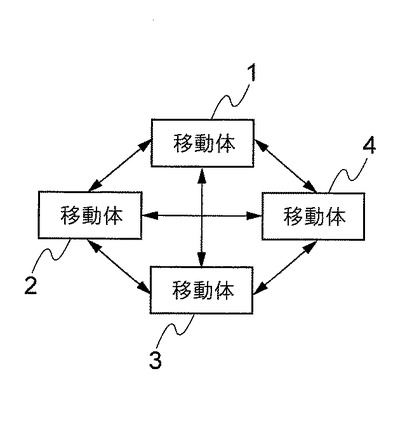
以下、本発明の実施の形態について添付図面を参照しながら説明する。まず、本発明の第1実施形態について説明する。図1は本発明に係る移動体通信システムの一例の構成図である。なお、本実施形態では、移動体の一例として、地上を走行する車両について説明するが、この車両に限定されるものではなく、飛翔体等にも本発明の適用が可能である。
【0026】
同図を参照すると、本発明に係る移動体通信システムの一例は、メッシュ型ネットワークを構成する移動体1〜4を含んで構成される。
【0027】
このメッシュ型ネットワークを構成する移動体1〜4の各々は対をなす相手方移動体とペンシルビーム(狭ビーム)を用いてユニット間(peer to peer)通信を行う。また、これらの移動体1〜4でアドホック(Ad Hoc)ネットワークを構成することも可能である。さらに、このメッシュ型ネットワークと同様の他のメッシュ型ネットワークを1個または複数個含み、これらネットワーク間を通信リンクで接続することも可能である。
【0028】
移動体1〜4の各々は対をなす相手方移動体とペンシルビームを用いて自己の位置情報、速度情報等を交換し、相手方移動体から取得した位置情報、速度情報等および自己の位置情報、速度情報等ならびに姿勢方位情報を元に、自己の中心線(基準方向)から見た相対的な相手方移動体の方向を演算し、その方向に自己のペンシルビームを照射して前記相手方移動体と通信を行う。
【0029】
移動体間通信は、一例としてTDMPA(Time Division Multiple Pair Access;時分割で割り当てられたタイムスロットで、ペアとなる2つの移動体間でデータを送受信する方式)で割り当てられるタイムスロットを用いて行われる。また、周波数の一例としてミリ波が使用される。
【0030】
この時、ペアとなる移動体が互いにペンシルビームを照射し合うことで、全二重通信が可能となる。ただし、全二重通信の実現は、取得できる周波数帯域や運用面での全二重通信の必要性等に依存する。
【0031】
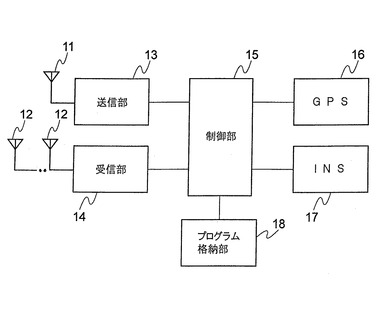
図2は本発明に係る移動体1〜4の構成の一例を示す図である。同図を参照すると、移動体1〜4はアンテナ11,12と、送信部13と、受信部14と、制御部15と、GPS16と、INS17と、プログラム格納部18とを含んで構成される。アンテナ11,12は指向制御が可能となるように構成される。一例として、送信用アンテナ11は一本、受信用アンテナ12は4本のアンテナで構成される。また、アンテナ11、12の一例として、フェーズド・アレイ・アンテナ(Phased Arrei Antenna)が使用される。
【0032】
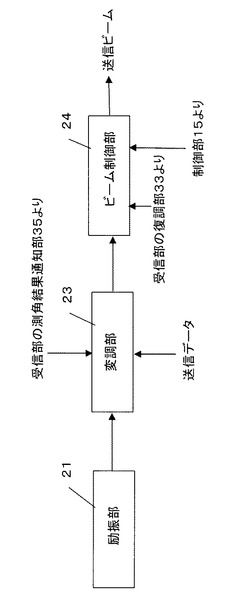
図3は送信部の構成の一例を示す図である。なお、同図では本発明に特有の部位のみを表示し、その他公知の送信部の部位については説明および図示を割愛する。送信部13は1本のビームを送信する。同図を参照すると、送信部13は送信ビーム用高周波信号を発生する励振部21と、励振部21から出力される信号を送信データ(送信したい情報)および受信部の測角結果通知部35(後述)からのデータを用いて変調する変調部23と、変調部23から出力される信号のビームの照射方向を、制御部15からの信号および受信部の復調部33(後述)から出力される信号に含まれる測角結果情報を用いて制御するビーム制御部24とを含んでいる。そして、ビーム制御部24からアンテナ11を介して1本のビームが送信される。
【0033】
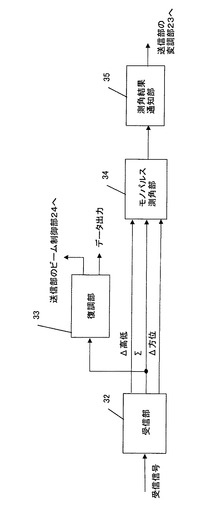
図4は受信部の構成の一例を示す図である。受信部14は相手方移動体の送信部13からの1本のビームをアンテナ12を介して受信部32で受信する。同図を参照すると、受信部14は受信部32と、受信部32で受信した受信信号の振幅の和情報(Σ)を復調する復調部33と、受信部32で受信した受信信号の振幅の和情報(Σ)および高低情報(Δ高低)ならびに方位情報(Δ方位)に基づきモノパルス測角を行い、測角誤差値を算出するモノパルス測角部34と、モノパルス測角部34で算出された測角誤差値を送信部13の変調部23へ出力する測角結果通知部35とを含んでいる。また、復調部33は受信データの出力を行うとともに、受信信号に含まれる相手方移動体が測定した測角結果情報を送信部13のビーム制御部24へ出力する。
【0034】
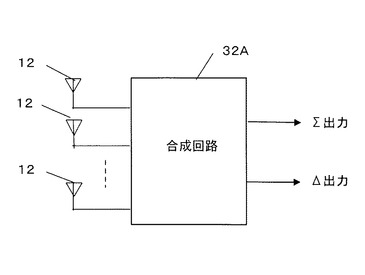
図5は図4の受信部32に含まれる合成回路32Aの一例の構成図である。合成回路32Aの入力側に複数のアンテナ12(本実施形態では一例として4本)が接続される。合成回路32Aは一例として、公知のハイブリッド回路(たとえば、ラットレース回路等)で構成されており、複数のアンテナ12からの信号の和信号(Σ)、および複数のアンテナ12からの信号とその信号の180度位相が異なる信号とから算出される差信号(Δ)が出力される。すなわち、合成回路32Aから出力される和信号(Σ)は復調部33およびモノパルス測角部34へ出力され、合成回路32Aから出力される差信号(Δ)(Δ高低およびΔ方位)はモノパルス測角部34へ出力される。
【0035】
図2に戻り、GPS16は衛星を用いて自移動体の位置を測距する部位であり、INS17は自己の姿勢および方位情報を取得する部位である。アンテナ11は送信用であり、アンテナ12は受信用である。
【0036】
プログラム格納部18には後述するビームの方向制御方法のプログラムが格納されている。制御部15はプログラム格納部18内のプログラムを参照し、送信部13、受信部14、GPS16およびINS17を制御する。
【0037】
送信ビームを受信側移動体に的確に照射するためには、送信側移動体が受信側移動体の位置をある精度(ビームの中に受信側移動体が入るくらいの精度)で知る必要がある。GPSが使用できる環境化では、GPSから得られる位置情報を移動体間で定期的に交換することで、両移動体の位置を正確に知ることができる。送信側移動体は、入手した受信側移動体の位置と自移動体のGPSおよびINSから得られる姿勢、方位情報等を利用し、送信ビームの方向を制御する。
【0038】
一方、GPSが何らかの妨害を受けた場合はINSのみによって自移動体の指向方向を測定しなければならない。しかし、INSは時間の経過により自己位置の誤差が蓄積するため、送信側および受信側移動体両方のINSの蓄積誤差により送信側移動体から照射されるビームは受信側移動体から徐々にずれていくという問題がある。
【0039】
本発明は、モノパルス測角を用いてこの問題を解決する。モノパルス測角では、受信側移動体において送信ビームの中心線からの変位量を測定することが可能なため、その測定結果を送信側移動体に通知することにより、送信側移動体において送信ビーム中心線のオフセット値を補正することが可能となる。
【0040】
以下、本発明のビームの方向制御方法についてその一例を説明する。以下の説明では、一例として、送信側移動体と、受信側移動体が存在し、各々の移動体は図3に示す送信部と、図4および図5に示す受信部を備えているものとする。
【0041】
図6は本発明に係るビームの方向制御方法の動作の一例を示すフローチャートである。前提として、送信側移動体はGPSが使用できず、したがってINSのみによって送信側および受信側移動体間の位置関係を計算しなければならない環境下にあるものとする。そこで、送信側移動体はINSを用いて自己の位置情報および速度情報等を取得し、それらの情報を受信側移動体に送信している。
【0042】
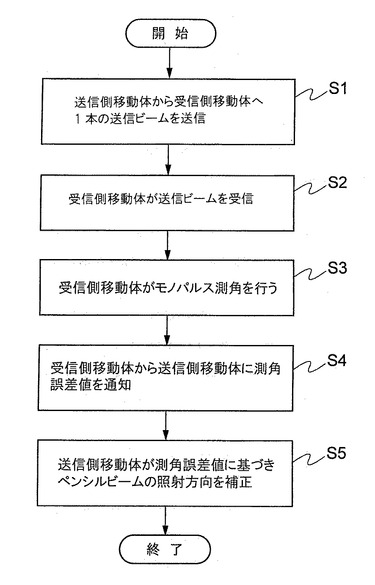
まず、送信側移動体の送信部13のビーム制御部24から受信側移動体に対し、1本の送信ビームを送信する(ステップS1)。次に、受信側移動体の受信部14の受信部32がその送信ビームを受信する(ステップS2)。次に、受信側移動体のモノパルス測角部34が受信部32からの送信ビーム(Σ、Δ高低およびΔ方位)を入力し、その送信ビームに基づきモノパルス測角を行う(ステップS3)。
【0043】
次に、モノパルス測角部34でモノパルス測角の結果信号である測角誤差値が測角結果通知部35に出力される。次に、測角結果通知部35から送信部13の変調部23に測角誤差値が出力される。次に、変調部23から測角誤差値の変調信号がビーム制御部24に出力される。そして、ビーム制御部24から測角誤差値が送信側移動体に通知される(ステップS4)。
【0044】
次に、送信側移動体の受信部14で受信側移動体からの測角誤差値が受信される。すなわち、送信側移動体の受信部14の受信部32(図4参照)が受信側移動体からの測角誤差値を受信する。次に、復調部33が受信部32で受信した信号の一部であるΣ信号を入力する。このΣ信号には受信側移動体からの測角誤差値の情報が含まれている。
【0045】
次に、復調部33はその測角誤差値を復調し送信部13のビーム制御部24へ出力する。そして、ビーム制御部24は制御部15からの受信側移動体の方向を演算した結果データ(送信側移動体の自己位置、姿勢方位情報、受信側移動体から受信した自己位置情報を元に演算したデータ)および測角誤差値に基づきペンシルビームの照射方向を補正する(ステップS5)。
【0046】
これにより、送信側移動体の送信ビームを受信側移動体の方向に正確に指向させることができる。
【0047】
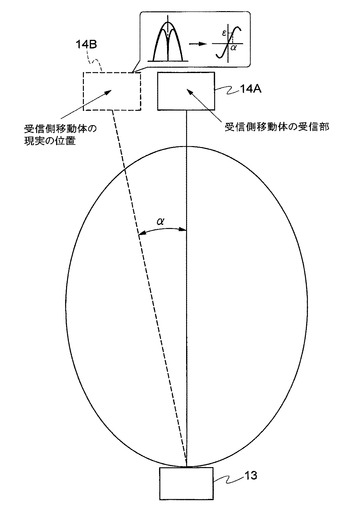
次に、本発明に係るビームの方向制御方法におけるモノパルス測角の具体例について説明する。図7は本発明に係るビームの方向制御方法におけるモノパルス測角の具体例を示す図である。同図の実線で示した部分は、送信側移動体の送信部13から送信されたペンシルビームが、正確に受信側移動体の受信部14の方向を指向している場合を示している(この場合の受信部14の位置を実線14Aで示している)。
【0048】
しかし、現実にはINSの指向方向情報は時間の経過により誤差が蓄積するため、送信側移動体の送信部13から送信されたペンシルビームの指向方向は時間の経過とともに受信部14から外れていく(この場合の受信部14の位置を破線14Bで示している)。このときの送信側移動体から受信側移動体を指向する角度誤差がα(度)であるものとする。
【0049】
この角度誤差を補正するために、送信側移動体から送信された1本の送信ビームを受信側移動体の受信部14で受信し、受信側移動体が受信した送信ビームに基づきモノパルス測角を行い、その結果算出された角度誤差αの情報を送信側移動体に送信する。送信側移動体は得られた角度誤差情報に基づき角度誤差αが零に近づくように受信側移動体へのビーム方向を補正する。
【0050】
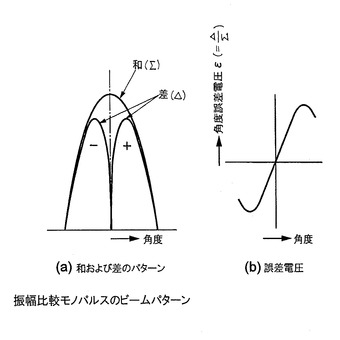
次に、送信側移動体から送信された送信ビームを受信した受信側移動体でのモノパルス測角の一例について説明する。図8は受信側移動体でのモノパルス測角の一例を示すモノパルスのビームパターン図である。
【0051】
モノパルス測角は、送信側移動体から送信された1本の送信ビームを受信側移動体のアンテナ(一例として、フェーズド・アレイ・アンテナ)を介して受信部14で受信し、合成回路32A(図5参照)で所定の処理を行って測角情報を得るものである。
【0052】
モノパルス方式には振幅を検出する方式と、位相を検出する方式が存在する。一方、本実施形態では、一例として、フェーズド・アレイ・アンテナでモノパルスの位相を検出する方式を採用するが、以下のモノパルス測角では、便宜上振幅を検出する方式の一例について説明する。なお、位相を検出する方式も以下の振幅を検出する方式と同様に説明することができる。
【0053】
振幅比較モノパルスは、受信側移動体において受信した、一部が重なり合った2個の受信ビームを一組として扱い、角度誤差(アンテナ正面からのずれ)を検出する。本実施形態に示すように方位、高低の両方について角度誤差を検出するときは、4個の受信ビームを使用する。
【0054】
2個の受信ビームを使用する例について述べると、受信側移動体のモノパルス測角部34にて、送信側移動体のビーム制御部24から送信された1本の送信ビーム(モノパルス)を合成回路32Aで受信し、各々の受信ビームの振幅の和と差を算出する(図8(a)参照)。
【0055】
この振幅の和(Σ)と差(Δ)とから角度誤差を算出することができる。角度誤差電圧(ε)は差信号(Δ)を和信号(Σ)で正規化して、すなわち、角度誤差電圧(ε)は差信号(Δ)を和信号(Σ)で除算することにより求められる(ε=Δ/Σ)。角度誤差電圧(ε)は、おおむねS字状の形状となり、アンテナの正面方向からのずれを検出することができる(図8(b)参照)。この角度誤差電圧(ε)が図7に示す角度誤差α(度)に対応する。
【0056】
受信側移動体の受信部14のモノパルス測角部34はこの角度誤差αを算出し、測角結果通知部35がその角度誤差α情報を送信部13の変調部23へ出力する。
【0057】
一方、その角度誤差α情報を入力した変調部23は、その角度誤差α情報と送信データとを変調しビーム制御部24へ出力する。ビーム制御部24は、その角度誤差α情報と送信データとを送信側移動体に送信する。
【0058】
これに対し、送信側移動体は受信側移動体からの角度誤差α情報および送信データをアンテナ12を介して受信部14内の受信部32で受信する。復調部33はこの角度誤差α情報および受信データを復調する。そして、角度誤差α情報の復調信号を送信部13のビーム制御部24へ出力し、受信データはそのまま出力する。
【0059】
ビーム制御部24は、制御部15(図2参照)で得られた自己位置および姿勢方位情報ならびに受信側移動体から受信した自己位置情報を元にして算出した相手方移動体(すなわち受信側移動体)の大体の方向を示すデータを取得する。
【0060】
そして、ビーム制御部24はその取得したデータと、復調部33から得た角度誤差α情報とに基づき受信側移動体に対する送信ビームの方向を制御する。具体的には、角度誤差αが零に近づくように送信ビームの方向を制御する。これにより、送信側移動体のビームを正確に受信側移動体の方向に指向させることができる。
【0061】
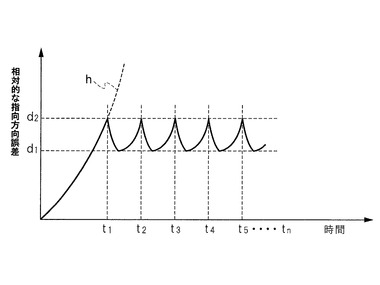
図9は移動体のINS17における相対的な指向方向誤差の一例を示す図である。また、同図は送信側移動体から受信側移動体に対し、送信ビームの送信を複数回行う場合の一例も示している。
【0062】
同図は時間t1,t2,t3,・・・,tn(nは正の整数)ごとに送信側移動体から受信側移動体に対し、送信ビームの送信が行われる場合を示している。そして送信ビームを時間t1,t2,t3,・・・,tnの各々で送信する度に、受信側移動体から角度誤差αの情報を受け取り、その角度誤差αが零になるように送信ビームの方向を補正することにより、誤差がd2からd1に補正され、かつ誤差d1の状態が以後も保持される一例を示している。
【0063】
一方、同図の曲線hは、送信側移動体から受信側移動体に対し送信ビームの送信が行われない場合の指向方向誤差の一例を示している。同図に示すように、送信側移動体の指向方向の誤差は時間経過とともに積算され増大していくことが分かる。
【0064】
本発明では、送信側移動体から時間t1に受信側移動体に対し照射された送信ビームに対し、受信側移動体にてモノパルス測角が行われた結果、送信側移動体の送信ビームの指向方向の誤差をd2からd1(d2>d1)に低減させることが可能となる。
【0065】
さらに、この送信ビームの送信を送信側移動体から受信側移動体に対し、時間t1以降(時間t2,t3,・・・,tn)も定期的に行うことにより、送信側移動体の送信ビームの指向方向の誤差をd1以内に保持することが可能となる。これにより、送信側移動体は時間t1以降も送信ビームを受信側移動体の方向に指向させることが可能となる。
【0066】
以上説明したように、本発明の第1実施形態によれば、受信側移動体で送信側移動体から照射された送信ビームをモノパルス測角し、その測角結果を送信側移動体に通知し、送信側移動体においてその測角結果に基づき送信ビームの方位を補正する構成であるため、GPSを使用できない環境下において、送信側移動体のビームを正確に受信側移動体の方向に指向させることが可能となる。また、送信ビームの送信を複数回行う構成によれば、指向方向の積算誤差値を所定値以内に保持することが可能となる。
【0067】
次に、本発明の第2実施形態について説明する。第2実施形態は送信ビームの送信を複数回行う場合の他の例に関するものである。送信ビームの送信を複数回行う動作は上記のとおりであるが、第2実施形態では測角誤差の算出方法について工夫している。
【0068】
第2実施形態では、移動体のモノパルス測角部33は、モノパルス測角を複数回行った結果、測角誤差の積算値が所定閾値に達した場合にモノパルス測角の結果を送信側移動体に通知する。
【0069】
第1実施形態では、送信側移動体からの送信ビームを受信側移動体が受信するたびに、受信側移動体から送信側移動体に対しモノパルス測角の結果を通知している。これに対し、第2実施形態によれば、このモノパルス測角の結果を通知する回数を第1実施形態の場合よりも低減することが可能となる。
【0070】
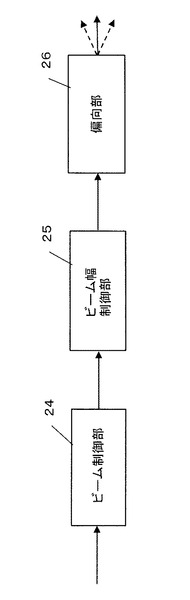
次に、第3実施形態について説明する。第3実施形態は送信ビームのビーム幅制御方法に関するものである。図10は第3実施形態における送信部の構成図、図11および図12は第3実施形態の動作の一例を示す図である。
【0071】
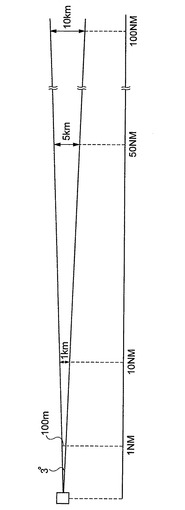
図10を参照すると、本発明に係る送信部13は図3に示すビーム制御部24の後段に、送信ビームのビーム幅を制御するビーム幅制御部25を含んでいる。また、同図にはビーム幅制御部25の後段にビーム偏向を行う偏向部26も表示されているが、この偏向部26は図3の送信部の構成にも含まれるものである。図3の例では便宜上、偏向部26の図示を割愛している。また、図11はビーム幅(換言すれば、ビームの拡がり角)が3度の場合、図12はビーム幅(ビームの拡がり角)が12度の場合の一例をそれぞれ示している。
【0072】
受信側移動体の位置にある程度の誤差があったとしても、ビーム幅を広くすることにより、送信側移動体は受信側移動体をビームの中に捕らえることが可能となる。図11はビーム幅(ビームの拡がり角)が3度の場合の1NM,10NM,50NM,100NMの距離におけるビーム幅を示し、図12はビーム幅(ビームの拡がり角)が12度の場合の1NM,10NM,50NM,100NMの距離におけるビーム幅を示している。
【0073】
ビーム幅が12度の場合は、ビーム幅が3度の場合に比べ約4倍となる。よって送信側移動体の保持する受信側移動体の位置の誤差が比較的大きい場合でも、ビーム幅の範囲内に受信側移動体を捕える可能性が高くなり、よって送信側移動体は受信側移動体と通信することが可能となる。
【0074】
以上説明したように、本発明の第3実施形態によれば、受信側移動体の位置の誤差が比較的大きい場合でも、送信側移動体においてビーム幅を広げることにより、送信側移動体は受信側移動体と通信することが可能となる。換言すれば、送信側移動体は受信側移動体との距離が近いと送信ビームのビーム幅を広げ、受信側移動体との距離が遠いと送信ビームのビーム幅を狭めるよう制御することにより、受信側移動体との距離の遠近にかかわらず受信側移動体と通信することが可能となる。
【0075】
次に、本発明の第4実施形態について説明する。第4実施形態は送信電力制御方法に関するものである。図13は第4実施形態における送信部の構成図である。同図を参照すると、本発明に係る送信部13は第3実施形態(図10参照)のビーム幅制御部25の代わりに送信電力制御部29を備えている。なお、図13においても偏向部26を表示しているが、その理由は図10について述べたのと同様である。
【0076】
送信電力制御部29は受信側移動体との距離に応じて送信電力を制御する。これにより、送信側移動体は受信側移動体との距離に適した送信電力を用いて受信側移動体と通信することが可能となる。
【0077】
次に、本発明の第5実施形態について説明する。第5実施形態は送信ビームの高低および方位方向の拡がり角制御方法に関するものである。図14は第5実施形態における送信部の構成図である。
【0078】
図14を参照すると、本発明に係る送信部13は図3に示すビーム制御部24の後段に、送信ビームの高低および方位方向の拡がり角を制御する高低および方位方向拡がり角制御部27と、通信間隔を制御する通信間隔制御部28とを含んで構成される。なお、図14においても偏向部26を表示しているが、その理由は図10について述べたのと同様である。
【0079】
受信側移動体が送信側移動体の近傍に存在する場合に、受信側移動体が高機動(例えば、60度以上の角度で急上昇した場合等)、あるいは方位方向に機動した場合、送信側移動体から照射したビームが受信側移動体から外れる場合がある。
【0080】
なお、本実施形態の場合、移動体は地上を走行する車両を想定しているが、この場合の受信側移動体が高機動する場合の一例として、受信側移動体の直前に急勾配で上昇する坂道が存在する場合等が考えられる。
【0081】
このような場合に、上記のような近距離通信では、高低および方位方向拡がり角制御部27によりビームの高低方向および方位方向の拡がり角を広げる(例えば、3度から20度等に広げる)、あるいは通信間隔制御部28により通信間隔を比較的短くする(例えば、1秒間隔を0.1秒間隔等に短縮する)。なお、高低および方位方向拡がり角制御部27は高低および方位方向の両方の拡がり角を広げてもよいし、高低あるいは方位のうちの一方のみの拡がり角を広げてもよい。
【0082】
また、受信側移動体が高機動あるいは方位方向に機動するか否かは送信側移動体側で予測することが困難であるため、受信側移動体の位置が送信側移動体の位置の近傍のときは、送信側移動体がビームを広げ、遠方のときはビームを狭める。
【0083】
これにより、受信側移動体の位置が送信側移動体の位置の近傍にあり、受信側移動体が高機動あるいは方位方向に機動した場合でも、送信側移動体は受信側移動体をビームの中に捕らえることができる。なお、受信側移動体をビームの中に捕らえるのに必要なビームの拡がり角や通信間隔は、送信側移動体と受信側移動体間の距離や受信側移動体の機動の程度によって適宜変更される。
【0084】
以上説明したように、本発明の第5実施形態によれば、受信側移動体が高機動あるいは方位方向に機動した場合でも、送信側移動体は受信側移動体をビームの中に捕らえることが可能となる。
【0085】
次に、本発明の第6実施形態について説明する。第1実施形態では、受信側移動体がモノパルス測角を行う場合について示したが、送信側移動体がモノパルス測角を行いペンシルビームの照射方向を補正することも可能である。第6実施形態ではこのビームの方向制御方法の一例について述べる。
【0086】
図15は本発明の第6実施形態の動作を示すフローチャートである。同図は送信側移動体がモノパルス測角を行う場合のビームの方向制御方法の一例を示している。
【0087】
同図を参照すると、まず、送信側移動体が受信側移動体の方向に送信ビームを送信する(ステップS11)。次に、受信側移動体がその送信ビームを受信して、折り返し受信側移動体に対し返信ビームを送信する(ステップS12)。次に、その返信ビームを受信した送信側移動体がその返信ビームに基づきモノパルス測角を行う(ステップS13)。そして、送信側移動体がモノパルス測角の結果得た誤差値に基づき、自移動体から受信側移動体へのペンシルビームの照射方向を補正する(ステップS14)。
【0088】
なお、モノパルス測角の動作自体は第1実施形態と同様であり、また送信側移動体側でモノパルス測角を行う部分は、送信側移動体側の受信部(図4参照)で第1実施形態と同様に行うことが可能である。したがって、第5実施形態における送信側移動体および受信側移動体の構成の説明は割愛する。
【0089】
以上説明したように、本発明の第6実施形態によれば、送信側移動体でモノパルス測角を行うことにより、送信側移動体のビームを正確に受信側移動体の方向に指向させることが可能となる。
【0090】
次に、本発明の第7実施形態について説明する。第7実施形態はビームの方向制御方法のプログラムに関するものである。図2に示すように、移動体はプログラム格納部18を有している。このプログラム格納部18には、図6および図15にフローチャートで示すビームの方向制御方法のプログラムが格納されている。移動体の制御部15(請求項10の"コンピュータ"に対応)はプログラム格納部18からそのプログラムを読み出し、そのプログラムにしたがって送信部13および受信部14を制御する。その制御方法については既に述べたので、ここでの説明は割愛する。
【0091】
なお、図6および図15に示すプログラムを送信側および受信側移動体の両者が有しており、送信側移動体にて、図6のステップS1およびS5の処理を行い、受信側移動体にて図6のステップS2〜S4の処理を行う。また、送信側移動体にて、図15のステップS11,S13,S14の処理を行い、受信側移動体にて図15のステップS12の処理を行う。
【0092】
以上説明したように、本発明の第7実施形態によれば、GPSが使用できず、したがってINSのみによって送信側および受信側移動体間の位置関係を演算しなければならない環境下において、送信側移動体が受信側移動体の方向に的確にビームを照射することが可能なプログラムを得ることが可能となる。
【0093】
上記の実施形態の一部または全部は、以下の付記のようにも記載されうるが、以下には限られない。
【0094】
(付記1) ペンシルビームを用いて移動体間で通信を行う移動体通信システムであって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御手段と、前記受信側移動体が前記送信ビームを受信部で受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角手段と、前記受信側移動体から前記送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知手段とを含み、前記ビーム制御手段は、前記受信側移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正する移動体通信システムであり、
前記送信側移動体は前記受信側移動体との距離に応じて送信ビームのビーム幅を制御するビーム幅制御手段を含むことを特徴とする移動体通信システム。
【0095】
(付記2) 前記送信側移動体は前記受信側移動体との距離に応じて送信ビームの送信電力を制御する送信電力制御手段を含むことを特徴とする付記1記載の移動体通信システム。
【0096】
(付記3) 前記送信側移動体は、前記受信側移動体が高機動あるいは方位方向に機動した場合、前記受信側移動体を捕らえるために前記送信ビームの高低方向および方位方向の拡がり角を制御する高低および方位方向拡がり角制御手段を含むことを特徴とする付記1または2記載の移動体通信システム。
【0097】
(付記4) 前記送信側移動体は、前記受信側移動体が高機動あるいは方位方向に機動した場合、前記受信側移動体を捕らえるために通信間隔を短くする通信間隔制御手段を含むことを特徴とする付記1から3のいずれかに記載の移動体通信システム。
【0098】
(付記5) 各移動体間でアドホックネットワークが形成されることを特徴とする付記1から4のいずれかに記載の移動体通信システム。
【0099】
(付記6) 各々の移動体は自己の位置情報をGPS(Global Positioning System )あるいはINS(Inertial Navigation System)から取得することを特徴とする付記1から5のいずれかに記載の移動体通信システム。
【0100】
(付記7) ペンシルビームを用いて移動体間で通信を行う移動体通信システムであって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御手段と、前記受信側移動体が前記送信ビームを受信して、折り返し前記送信側移動体に対し返信ビームを送信する返信ビーム送信手段と、前記返信ビームを受信した前記送信側移動体が前記返信ビームに基づきモノパルス測角を行うモノパルス測角手段と、前記送信側移動体がモノパルス測角の結果得た測角誤差値に基づき自移動体から前記受信側移動体へのペンシルビームの照射方向を補正する照射方向補正手段とを含むことを特徴とする移動体通信システム。
【0101】
(付記8) ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおける移動体であって、相手方移動体との距離に応じて送信ビームのビーム幅を制御するビーム幅制御手段を含むことを特徴とする移動体。
【0102】
(付記9) 前記相手方移動体との距離に応じて送信ビームの送信電力を制御する送信電力制御手段を含むことを特徴とする付記8記載の移動体。
【0103】
(付記10) 前記相手方移動体が高機動あるいは方位方向に機動した場合、前記相手方移動体を捕らえるために前記送信ビームの高低方向および方位方向の拡がり角を制御する高低および方位方向拡がり角制御手段を含むことを特徴とする付記8または9記載の移動体。
【0104】
(付記11) 前記相手方移動体が高機動あるいは方位方向に機動した場合、前記相手方移動体を捕らえるために通信間隔を短くする通信間隔制御手段を含むことを特徴とする付記8から10のいずれかに記載の移動体。
【0105】
(付記12) 移動体間でアドホックネットワークが形成されることを特徴とする付記8から11のいずれかに記載の移動体。
【0106】
(付記13) 各々の移動体は自己の位置情報をGPS(Global Positioning System )あるいはINS(Inertial Navigation System)から取得することを特徴とする付記8から12のいずれかに記載の移動体。
【0107】
(付記14) ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおけるビームの方向制御方法であって、送信側移動体は受信側移動体との距離に応じて送信ビームのビーム幅を制御するビーム幅制御ステップを含むことを特徴とするビームの方向制御方法。
【0108】
(付記15) 前記送信側移動体は前記受信側移動体との距離に応じて送信ビームの送信電力を制御する送信電力制御ステップを含むことを特徴とする付記14記載のビームの方向制御方法。
【0109】
(付記16) 前記送信側移動体は、前記受信側移動体が高機動あるいは方位方向に機動した場合、前記受信側移動体を捕らえるために前記送信ビームの高低方向および方位方向の拡がり角を制御する高低および方位方向拡がり角制御ステップを含むことを特徴とする付記14または15記載のビームの方向制御方法。
【0110】
(付記17) 前記送信側移動体は、前記受信側移動体が高機動あるいは方位方向に機動した場合、前記受信側移動体を捕らえるために通信間隔を短くする通信間隔制御ステップを含むことを特徴とする付記14から16のいずれかに記載のビームの方向制御方法。
【0111】
(付記18) 各移動体間でアドホックネットワークが形成されることを特徴とする付記14から17のいずれかに記載のビームの方向制御方法。
【0112】
(付記19) 各々の移動体は自己の位置情報をGPS(Global Positioning System )あるいはINS(Inertial Navigation System)から取得することを特徴とする付記14から18のいずれかに記載のビームの方向制御方法。
【0113】
(付記20) ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおけるビームの方向制御方法であって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御ステップと、前記受信側移動体が前記送信ビームを受信して、折り返し前記送信側移動体に対し返信ビームを送信する返信ビーム送信ステップと、前記返信ビームを受信した前記送信側移動体が前記返信ビームに基づきモノパルス測角を行うモノパルス測角ステップと、前記送信側移動体がモノパルス測角の結果得た測角誤差値に基づき自移動体から前記受信側移動体へのペンシルビームの照射方向を補正する照射方向補正ステップとを含むことを特徴とするビームの方向制御方法。
【産業上の利用可能性】
【0114】
本発明を、地上を走行する車両のみならず、航空機等の飛翔体に適用することが可能である。
【符号の説明】
【0115】
1〜4 移動体
11,12 アンテナ
13 送信部
14 受信部
15 制御部
16 GPS
17 INS
18 プログラム格納部
21 励振部
23 変調部
24 ビーム制御部
25 ビーム幅制御部
26 偏向部
27 上下方向拡がり角制御部
28 通信間隔制御部
29 送信電力制御部
32 受信部
32A 合成回路
33 復調部
34 モノパルス測角部
35 測角結果通知部
【技術分野】
【0001】
本発明は、移動体通信システムおよび移動体ならびにそのビームの方向制御方法に関し、特にペンシルビームを用いた移動体通信システムおよび移動体ならびにそのビームの方向制御方法に関する。
【背景技術】
【0002】
移動体がペンシルビーム(狭ビーム)を使用してユニット間(peer to peer)通信を行うネットワークは知られている。この種のネットワークを構成するためには、データを送信する移動体(以下、送信側移動体と記す)がデータを受信する移動体(以下、受信側移動体と記す)へ的確にビームを照射する必要がある。
【0003】
そのため、この種のネットワークを実現するための核となる技術は、送信側移動体が受信側移動体へ照射するビームの方向制御である。ここで、ビームの方向制御について簡単に説明する。
【0004】
ビームを受信側移動体へ的確に照射するためには、送信側移動体が受信側移動体の位置をある精度(ビーム幅の中に受信側移動体が入る程度の精度)で知る必要がある。GPS(Global Positioning System)を利用できる環境下では、GPSから得られる位置情報を移動体間で定期的に交換することで、両移動体の位置を正確に知ることができる。
【0005】
送信側移動体は、入手した受信側移動体の位置情報と、GPSから得た自移動体の位置情報および自移動体のINS(Inertial Navigation System)等から得られる自移動体の姿勢、方向情報等を利用して、受信側移動体に照射するビームの方向を制御する。
【0006】
一方、本発明に関連する通信システムの一例として、無線送受信部を有し、相対的に移動する相手方と通信を行う移動無線通信装置において、自己の位置を含む自己情報を相手方に送信する電波通信部と、この電波通信部で送信した自己情報と相手方の位置を含む相手情報とに基づいて、相手方との間に接続されたレーザ通信回線を介して、圧縮されたデータを相手方に向け送信するレーザ通信部とを備えたものが開示されている(特許文献1参照)。また、この移動無線通信装置には、自己の正確な現在位置情報を測定するために、INSあるいはGPSが搭載されていると記載されている。
【0007】
また、他の一例として、滑走路RWYの中央軸上に2個の地上装置を設け、これらの地上装置にそれぞれGPS受信装置を設けて、これらの計測位置を異なる周波数f1,f2で送信する着陸誘導システムが開示されている(特許文献2参照)。
【0008】
また、このシステムでは航空機にもGPS受信機を設け、航空機の位置情報も得る。これら三つの位置情報に基づき、航空機を滑走路RWYの周辺にまで誘導する。そして、ファイナルコースに入ると、滑走路RWYの中央軸両端に設けられたコーナリフレクタA1,A2に対してレーダ波を送出し、この反射波により得られる誤差信号をもとに、航空機の着陸誘導を行う。
【0009】
また、航空機は追尾レーダ部を有し、追尾レーダ部はコーナリフレクタA1に対しレーダ波を送出し、その反射信号に対してモノパルス測角処理を行うことが記載されている。
【0010】
さらに、他の一例として、複数の無線局を備え、各無線局間で無線通信を行う無線ネットワークにおける無線局の方位角測定方法において、複数の無線局のうちのサービスエリア内の各無線局に対する、所定の方位角毎の、受信電界強度、受信信号対干渉雑音比または搬送波対干渉雑音比である信号測定値を予め測定して信号測定値テーブルとして記憶装置に記憶する第1のステップと、各無線局からの送信信号を、信号測定値テーブルにおける最大値の信号測定値を有する方位角の主ビームのセクタパターンを含む互いに隣接する少なくとも2つのセクタパターンを用いてそれぞれ受信電界強度を測定し、測定した各受信電界強度に基づいて、モノパルス測角処理を用いて、予め測定された2つのセクタパターンの差パターンをその和パターンで除算した商パターンを2つのセクタパターンの主ビームの方位角度で直線近似して最大の受信電界強度を有する、送信信号を送信した無線局の方位角を計算する第2のステップとを含む発明が開示されている(特許文献3参照)。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2001−44941号公報
【特許文献2】特開平11−345400号公報
【特許文献3】特開2004−266523号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかし、GPSの電波は微弱であるため、妨害が容易である。GPSが妨害を受けると、GPSから自移動体の位置情報を得ることはできない。一方、GPSの代替案として、移動体内に装備されているINSから自移動体の位置情報を取得する方法がある。
【0013】
INSはジャイロと加速度計とから構成され、出発地点からの自移動体の姿勢方位および自己位置情報を一定時間毎に自移動体に報告するものであるが、その自己位置情報は時間の経過により誤差が蓄積する。このため、INSから入手する自移動体の姿勢方位情報と現実の自移動体の姿勢方位情報との差分は、時間の経過と共に大きくなる。したがって、INSから常時必要な位置精度で自移動体の指向方向情報を得ることも困難である。このため、送信側移動体は受信側移動体へ的確にビームを照射することができないという課題がある。
【0014】
一方、特許文献1に記載の技術は、INSおよびGPSを用いて自己の位置を測定し、その情報を相手方と交換することにより、相手方通信装置の方向を特定するものである。しかし、たとえINSが使用できたとしてもGPSが使用できない場合にいかにして相手方通信装置の存在する方向を特定するかについては特許文献1に全く記載されていない。したがって、特許文献1記載の技術によって本発明の課題を解決することはできない。
【0015】
また、特許文献2に記載の技術は、2個の地上装置および航空機にGPS受信機を設け、各々の位置を計測することをベースとする点で本発明と構成が全く異なる。また、モノパルス測角処理を行う点が記載されているものの、移動体対移動体の測角処理ではなく、航空機対滑走路のコーナリフレクタA1,A2の測角処理である点で本発明と構成が異なり、さらに、その測角処理は相手方から送信されるビームの方向の誤差を測定するためのものではなく、航空機が滑走路へ進入する角度を算出するためのものである点で本発明と目的が異なる。したがって、特許文献2記載の技術によって本発明の課題を解決することはできない。
【0016】
また、特許文献3に記載の技術は、モノパルス測角処理を用いて送信信号を送信した無線局の方位角を計算する視点が開示されている点で本発明と共通する。しかし、特許文献3に開示されているのは無線局の方位角を計算するまでの技術に止まり、その方位角の計算結果をいかに利用するかについては全く記載されていない。
【0017】
すなわち、特許文献3に開示の発明は相手方無線局に方位角の計算結果(すなわち、ビーム方位角の誤差値)を通知するという構成を有しない。つまり、特許文献3に開示の発明は相手方無線局に方位角の計算結果を通知することを目的としないため、その目的が本発明と全く異なり、その目的達成のための構成も本発明と全く異なる。したがって、特許文献3記載の技術によって本発明の課題を解決することはできない。
【0018】
そこで、本発明の目的は、GPSが使用できず、したがってINSのみによって送信側および受信側移動体間の位置関係を演算しなければならない環境下において、送信側移動体が受信側移動体の方向に的確にビームを照射することが可能な移動体通信システムおよび移動体ならびにビームの方向制御方法を提供することにある。
【課題を解決するための手段】
【0019】
前記課題を解決するために、本発明による移動体通信システムは、ペンシルビームを用いて移動体間で通信を行う移動体通信システムであって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御手段と、前記受信側移動体が前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角手段と、前記受信側移動体から前記送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知手段とを含み、前記ビーム制御手段は、前記受信側移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とする。
【0020】
また、本発明による移動体は、ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおける移動体であって、自移動体に設けられ、相手方移動体の方向に送信ビームを送信するビーム送信手段と、前記相手方移動体に設けられ、前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角手段と、前記相手方移動体に設けられ、前記自移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知手段とを含み、前記ビーム送信手段は、前記相手方移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とする。
【0021】
また、本発明によるビームの方向制御方法は、ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおけるビームの方向制御方法であって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御ステップと、前記受信側移動体が前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角ステップと、前記受信側移動体から前記送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知ステップとを含み、前記ビーム制御ステップは、前記受信側移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とする。
【0022】
また、本発明によるプログラムは、ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおけるビームの方向制御方法を、コンピュータに実行させるためのプログラムであって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御ステップと、前記受信側移動体が前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角ステップと、前記受信側移動体から前記送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知ステップとを含み、前記ビーム制御ステップは、前記受信側移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とする。
【発明の効果】
【0023】
本発明によれば、GPSが使用できず、したがってINSのみによって送信側および受信側移動体間の位置関係を計算しなければならない環境下において、送信側移動体が受信側移動体の方向に的確にビームを照射することが可能となる。
【図面の簡単な説明】
【0024】
【図1】本発明に係る移動体通信システムの一例の構成図である。
【図2】本発明に係る移動体1〜4の構成の一例を示す図である。
【図3】送信部の構成の一例を示す図である。
【図4】受信部の構成の一例を示す図である。
【図5】図4の受信部32に含まれる合成回路32Aの一例の構成図である。
【図6】本発明に係るビームの方向制御方法の動作の一例を示すフローチャートである。
【図7】本発明に係るビームの方向制御方法におけるモノパルス測角の具体例を示す図である。
【図8】受信側移動体でのモノパルス測角の一例を示すモノパルスのビームパターン図である。
【図9】移動体のINS17における相対的な指向方向誤差の一例を示す図である。
【図10】第3実施形態における送信部の構成図である。
【図11】第3実施形態の動作の一例を示す図である。
【図12】第3実施形態の動作の一例を示す図である。
【図13】第4実施形態における送信部の構成図である。
【図14】第5実施形態における送信部の構成図である。
【図15】第6実施形態の動作を示すフローチャートである。
【発明を実施するための形態】
【0025】
以下、本発明の実施の形態について添付図面を参照しながら説明する。まず、本発明の第1実施形態について説明する。図1は本発明に係る移動体通信システムの一例の構成図である。なお、本実施形態では、移動体の一例として、地上を走行する車両について説明するが、この車両に限定されるものではなく、飛翔体等にも本発明の適用が可能である。
【0026】
同図を参照すると、本発明に係る移動体通信システムの一例は、メッシュ型ネットワークを構成する移動体1〜4を含んで構成される。
【0027】
このメッシュ型ネットワークを構成する移動体1〜4の各々は対をなす相手方移動体とペンシルビーム(狭ビーム)を用いてユニット間(peer to peer)通信を行う。また、これらの移動体1〜4でアドホック(Ad Hoc)ネットワークを構成することも可能である。さらに、このメッシュ型ネットワークと同様の他のメッシュ型ネットワークを1個または複数個含み、これらネットワーク間を通信リンクで接続することも可能である。
【0028】
移動体1〜4の各々は対をなす相手方移動体とペンシルビームを用いて自己の位置情報、速度情報等を交換し、相手方移動体から取得した位置情報、速度情報等および自己の位置情報、速度情報等ならびに姿勢方位情報を元に、自己の中心線(基準方向)から見た相対的な相手方移動体の方向を演算し、その方向に自己のペンシルビームを照射して前記相手方移動体と通信を行う。
【0029】
移動体間通信は、一例としてTDMPA(Time Division Multiple Pair Access;時分割で割り当てられたタイムスロットで、ペアとなる2つの移動体間でデータを送受信する方式)で割り当てられるタイムスロットを用いて行われる。また、周波数の一例としてミリ波が使用される。
【0030】
この時、ペアとなる移動体が互いにペンシルビームを照射し合うことで、全二重通信が可能となる。ただし、全二重通信の実現は、取得できる周波数帯域や運用面での全二重通信の必要性等に依存する。
【0031】
図2は本発明に係る移動体1〜4の構成の一例を示す図である。同図を参照すると、移動体1〜4はアンテナ11,12と、送信部13と、受信部14と、制御部15と、GPS16と、INS17と、プログラム格納部18とを含んで構成される。アンテナ11,12は指向制御が可能となるように構成される。一例として、送信用アンテナ11は一本、受信用アンテナ12は4本のアンテナで構成される。また、アンテナ11、12の一例として、フェーズド・アレイ・アンテナ(Phased Arrei Antenna)が使用される。
【0032】
図3は送信部の構成の一例を示す図である。なお、同図では本発明に特有の部位のみを表示し、その他公知の送信部の部位については説明および図示を割愛する。送信部13は1本のビームを送信する。同図を参照すると、送信部13は送信ビーム用高周波信号を発生する励振部21と、励振部21から出力される信号を送信データ(送信したい情報)および受信部の測角結果通知部35(後述)からのデータを用いて変調する変調部23と、変調部23から出力される信号のビームの照射方向を、制御部15からの信号および受信部の復調部33(後述)から出力される信号に含まれる測角結果情報を用いて制御するビーム制御部24とを含んでいる。そして、ビーム制御部24からアンテナ11を介して1本のビームが送信される。
【0033】
図4は受信部の構成の一例を示す図である。受信部14は相手方移動体の送信部13からの1本のビームをアンテナ12を介して受信部32で受信する。同図を参照すると、受信部14は受信部32と、受信部32で受信した受信信号の振幅の和情報(Σ)を復調する復調部33と、受信部32で受信した受信信号の振幅の和情報(Σ)および高低情報(Δ高低)ならびに方位情報(Δ方位)に基づきモノパルス測角を行い、測角誤差値を算出するモノパルス測角部34と、モノパルス測角部34で算出された測角誤差値を送信部13の変調部23へ出力する測角結果通知部35とを含んでいる。また、復調部33は受信データの出力を行うとともに、受信信号に含まれる相手方移動体が測定した測角結果情報を送信部13のビーム制御部24へ出力する。
【0034】
図5は図4の受信部32に含まれる合成回路32Aの一例の構成図である。合成回路32Aの入力側に複数のアンテナ12(本実施形態では一例として4本)が接続される。合成回路32Aは一例として、公知のハイブリッド回路(たとえば、ラットレース回路等)で構成されており、複数のアンテナ12からの信号の和信号(Σ)、および複数のアンテナ12からの信号とその信号の180度位相が異なる信号とから算出される差信号(Δ)が出力される。すなわち、合成回路32Aから出力される和信号(Σ)は復調部33およびモノパルス測角部34へ出力され、合成回路32Aから出力される差信号(Δ)(Δ高低およびΔ方位)はモノパルス測角部34へ出力される。
【0035】
図2に戻り、GPS16は衛星を用いて自移動体の位置を測距する部位であり、INS17は自己の姿勢および方位情報を取得する部位である。アンテナ11は送信用であり、アンテナ12は受信用である。
【0036】
プログラム格納部18には後述するビームの方向制御方法のプログラムが格納されている。制御部15はプログラム格納部18内のプログラムを参照し、送信部13、受信部14、GPS16およびINS17を制御する。
【0037】
送信ビームを受信側移動体に的確に照射するためには、送信側移動体が受信側移動体の位置をある精度(ビームの中に受信側移動体が入るくらいの精度)で知る必要がある。GPSが使用できる環境化では、GPSから得られる位置情報を移動体間で定期的に交換することで、両移動体の位置を正確に知ることができる。送信側移動体は、入手した受信側移動体の位置と自移動体のGPSおよびINSから得られる姿勢、方位情報等を利用し、送信ビームの方向を制御する。
【0038】
一方、GPSが何らかの妨害を受けた場合はINSのみによって自移動体の指向方向を測定しなければならない。しかし、INSは時間の経過により自己位置の誤差が蓄積するため、送信側および受信側移動体両方のINSの蓄積誤差により送信側移動体から照射されるビームは受信側移動体から徐々にずれていくという問題がある。
【0039】
本発明は、モノパルス測角を用いてこの問題を解決する。モノパルス測角では、受信側移動体において送信ビームの中心線からの変位量を測定することが可能なため、その測定結果を送信側移動体に通知することにより、送信側移動体において送信ビーム中心線のオフセット値を補正することが可能となる。
【0040】
以下、本発明のビームの方向制御方法についてその一例を説明する。以下の説明では、一例として、送信側移動体と、受信側移動体が存在し、各々の移動体は図3に示す送信部と、図4および図5に示す受信部を備えているものとする。
【0041】
図6は本発明に係るビームの方向制御方法の動作の一例を示すフローチャートである。前提として、送信側移動体はGPSが使用できず、したがってINSのみによって送信側および受信側移動体間の位置関係を計算しなければならない環境下にあるものとする。そこで、送信側移動体はINSを用いて自己の位置情報および速度情報等を取得し、それらの情報を受信側移動体に送信している。
【0042】
まず、送信側移動体の送信部13のビーム制御部24から受信側移動体に対し、1本の送信ビームを送信する(ステップS1)。次に、受信側移動体の受信部14の受信部32がその送信ビームを受信する(ステップS2)。次に、受信側移動体のモノパルス測角部34が受信部32からの送信ビーム(Σ、Δ高低およびΔ方位)を入力し、その送信ビームに基づきモノパルス測角を行う(ステップS3)。
【0043】
次に、モノパルス測角部34でモノパルス測角の結果信号である測角誤差値が測角結果通知部35に出力される。次に、測角結果通知部35から送信部13の変調部23に測角誤差値が出力される。次に、変調部23から測角誤差値の変調信号がビーム制御部24に出力される。そして、ビーム制御部24から測角誤差値が送信側移動体に通知される(ステップS4)。
【0044】
次に、送信側移動体の受信部14で受信側移動体からの測角誤差値が受信される。すなわち、送信側移動体の受信部14の受信部32(図4参照)が受信側移動体からの測角誤差値を受信する。次に、復調部33が受信部32で受信した信号の一部であるΣ信号を入力する。このΣ信号には受信側移動体からの測角誤差値の情報が含まれている。
【0045】
次に、復調部33はその測角誤差値を復調し送信部13のビーム制御部24へ出力する。そして、ビーム制御部24は制御部15からの受信側移動体の方向を演算した結果データ(送信側移動体の自己位置、姿勢方位情報、受信側移動体から受信した自己位置情報を元に演算したデータ)および測角誤差値に基づきペンシルビームの照射方向を補正する(ステップS5)。
【0046】
これにより、送信側移動体の送信ビームを受信側移動体の方向に正確に指向させることができる。
【0047】
次に、本発明に係るビームの方向制御方法におけるモノパルス測角の具体例について説明する。図7は本発明に係るビームの方向制御方法におけるモノパルス測角の具体例を示す図である。同図の実線で示した部分は、送信側移動体の送信部13から送信されたペンシルビームが、正確に受信側移動体の受信部14の方向を指向している場合を示している(この場合の受信部14の位置を実線14Aで示している)。
【0048】
しかし、現実にはINSの指向方向情報は時間の経過により誤差が蓄積するため、送信側移動体の送信部13から送信されたペンシルビームの指向方向は時間の経過とともに受信部14から外れていく(この場合の受信部14の位置を破線14Bで示している)。このときの送信側移動体から受信側移動体を指向する角度誤差がα(度)であるものとする。
【0049】
この角度誤差を補正するために、送信側移動体から送信された1本の送信ビームを受信側移動体の受信部14で受信し、受信側移動体が受信した送信ビームに基づきモノパルス測角を行い、その結果算出された角度誤差αの情報を送信側移動体に送信する。送信側移動体は得られた角度誤差情報に基づき角度誤差αが零に近づくように受信側移動体へのビーム方向を補正する。
【0050】
次に、送信側移動体から送信された送信ビームを受信した受信側移動体でのモノパルス測角の一例について説明する。図8は受信側移動体でのモノパルス測角の一例を示すモノパルスのビームパターン図である。
【0051】
モノパルス測角は、送信側移動体から送信された1本の送信ビームを受信側移動体のアンテナ(一例として、フェーズド・アレイ・アンテナ)を介して受信部14で受信し、合成回路32A(図5参照)で所定の処理を行って測角情報を得るものである。
【0052】
モノパルス方式には振幅を検出する方式と、位相を検出する方式が存在する。一方、本実施形態では、一例として、フェーズド・アレイ・アンテナでモノパルスの位相を検出する方式を採用するが、以下のモノパルス測角では、便宜上振幅を検出する方式の一例について説明する。なお、位相を検出する方式も以下の振幅を検出する方式と同様に説明することができる。
【0053】
振幅比較モノパルスは、受信側移動体において受信した、一部が重なり合った2個の受信ビームを一組として扱い、角度誤差(アンテナ正面からのずれ)を検出する。本実施形態に示すように方位、高低の両方について角度誤差を検出するときは、4個の受信ビームを使用する。
【0054】
2個の受信ビームを使用する例について述べると、受信側移動体のモノパルス測角部34にて、送信側移動体のビーム制御部24から送信された1本の送信ビーム(モノパルス)を合成回路32Aで受信し、各々の受信ビームの振幅の和と差を算出する(図8(a)参照)。
【0055】
この振幅の和(Σ)と差(Δ)とから角度誤差を算出することができる。角度誤差電圧(ε)は差信号(Δ)を和信号(Σ)で正規化して、すなわち、角度誤差電圧(ε)は差信号(Δ)を和信号(Σ)で除算することにより求められる(ε=Δ/Σ)。角度誤差電圧(ε)は、おおむねS字状の形状となり、アンテナの正面方向からのずれを検出することができる(図8(b)参照)。この角度誤差電圧(ε)が図7に示す角度誤差α(度)に対応する。
【0056】
受信側移動体の受信部14のモノパルス測角部34はこの角度誤差αを算出し、測角結果通知部35がその角度誤差α情報を送信部13の変調部23へ出力する。
【0057】
一方、その角度誤差α情報を入力した変調部23は、その角度誤差α情報と送信データとを変調しビーム制御部24へ出力する。ビーム制御部24は、その角度誤差α情報と送信データとを送信側移動体に送信する。
【0058】
これに対し、送信側移動体は受信側移動体からの角度誤差α情報および送信データをアンテナ12を介して受信部14内の受信部32で受信する。復調部33はこの角度誤差α情報および受信データを復調する。そして、角度誤差α情報の復調信号を送信部13のビーム制御部24へ出力し、受信データはそのまま出力する。
【0059】
ビーム制御部24は、制御部15(図2参照)で得られた自己位置および姿勢方位情報ならびに受信側移動体から受信した自己位置情報を元にして算出した相手方移動体(すなわち受信側移動体)の大体の方向を示すデータを取得する。
【0060】
そして、ビーム制御部24はその取得したデータと、復調部33から得た角度誤差α情報とに基づき受信側移動体に対する送信ビームの方向を制御する。具体的には、角度誤差αが零に近づくように送信ビームの方向を制御する。これにより、送信側移動体のビームを正確に受信側移動体の方向に指向させることができる。
【0061】
図9は移動体のINS17における相対的な指向方向誤差の一例を示す図である。また、同図は送信側移動体から受信側移動体に対し、送信ビームの送信を複数回行う場合の一例も示している。
【0062】
同図は時間t1,t2,t3,・・・,tn(nは正の整数)ごとに送信側移動体から受信側移動体に対し、送信ビームの送信が行われる場合を示している。そして送信ビームを時間t1,t2,t3,・・・,tnの各々で送信する度に、受信側移動体から角度誤差αの情報を受け取り、その角度誤差αが零になるように送信ビームの方向を補正することにより、誤差がd2からd1に補正され、かつ誤差d1の状態が以後も保持される一例を示している。
【0063】
一方、同図の曲線hは、送信側移動体から受信側移動体に対し送信ビームの送信が行われない場合の指向方向誤差の一例を示している。同図に示すように、送信側移動体の指向方向の誤差は時間経過とともに積算され増大していくことが分かる。
【0064】
本発明では、送信側移動体から時間t1に受信側移動体に対し照射された送信ビームに対し、受信側移動体にてモノパルス測角が行われた結果、送信側移動体の送信ビームの指向方向の誤差をd2からd1(d2>d1)に低減させることが可能となる。
【0065】
さらに、この送信ビームの送信を送信側移動体から受信側移動体に対し、時間t1以降(時間t2,t3,・・・,tn)も定期的に行うことにより、送信側移動体の送信ビームの指向方向の誤差をd1以内に保持することが可能となる。これにより、送信側移動体は時間t1以降も送信ビームを受信側移動体の方向に指向させることが可能となる。
【0066】
以上説明したように、本発明の第1実施形態によれば、受信側移動体で送信側移動体から照射された送信ビームをモノパルス測角し、その測角結果を送信側移動体に通知し、送信側移動体においてその測角結果に基づき送信ビームの方位を補正する構成であるため、GPSを使用できない環境下において、送信側移動体のビームを正確に受信側移動体の方向に指向させることが可能となる。また、送信ビームの送信を複数回行う構成によれば、指向方向の積算誤差値を所定値以内に保持することが可能となる。
【0067】
次に、本発明の第2実施形態について説明する。第2実施形態は送信ビームの送信を複数回行う場合の他の例に関するものである。送信ビームの送信を複数回行う動作は上記のとおりであるが、第2実施形態では測角誤差の算出方法について工夫している。
【0068】
第2実施形態では、移動体のモノパルス測角部33は、モノパルス測角を複数回行った結果、測角誤差の積算値が所定閾値に達した場合にモノパルス測角の結果を送信側移動体に通知する。
【0069】
第1実施形態では、送信側移動体からの送信ビームを受信側移動体が受信するたびに、受信側移動体から送信側移動体に対しモノパルス測角の結果を通知している。これに対し、第2実施形態によれば、このモノパルス測角の結果を通知する回数を第1実施形態の場合よりも低減することが可能となる。
【0070】
次に、第3実施形態について説明する。第3実施形態は送信ビームのビーム幅制御方法に関するものである。図10は第3実施形態における送信部の構成図、図11および図12は第3実施形態の動作の一例を示す図である。
【0071】
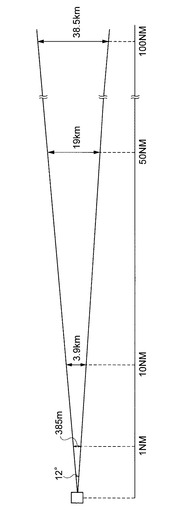
図10を参照すると、本発明に係る送信部13は図3に示すビーム制御部24の後段に、送信ビームのビーム幅を制御するビーム幅制御部25を含んでいる。また、同図にはビーム幅制御部25の後段にビーム偏向を行う偏向部26も表示されているが、この偏向部26は図3の送信部の構成にも含まれるものである。図3の例では便宜上、偏向部26の図示を割愛している。また、図11はビーム幅(換言すれば、ビームの拡がり角)が3度の場合、図12はビーム幅(ビームの拡がり角)が12度の場合の一例をそれぞれ示している。
【0072】
受信側移動体の位置にある程度の誤差があったとしても、ビーム幅を広くすることにより、送信側移動体は受信側移動体をビームの中に捕らえることが可能となる。図11はビーム幅(ビームの拡がり角)が3度の場合の1NM,10NM,50NM,100NMの距離におけるビーム幅を示し、図12はビーム幅(ビームの拡がり角)が12度の場合の1NM,10NM,50NM,100NMの距離におけるビーム幅を示している。
【0073】
ビーム幅が12度の場合は、ビーム幅が3度の場合に比べ約4倍となる。よって送信側移動体の保持する受信側移動体の位置の誤差が比較的大きい場合でも、ビーム幅の範囲内に受信側移動体を捕える可能性が高くなり、よって送信側移動体は受信側移動体と通信することが可能となる。
【0074】
以上説明したように、本発明の第3実施形態によれば、受信側移動体の位置の誤差が比較的大きい場合でも、送信側移動体においてビーム幅を広げることにより、送信側移動体は受信側移動体と通信することが可能となる。換言すれば、送信側移動体は受信側移動体との距離が近いと送信ビームのビーム幅を広げ、受信側移動体との距離が遠いと送信ビームのビーム幅を狭めるよう制御することにより、受信側移動体との距離の遠近にかかわらず受信側移動体と通信することが可能となる。
【0075】
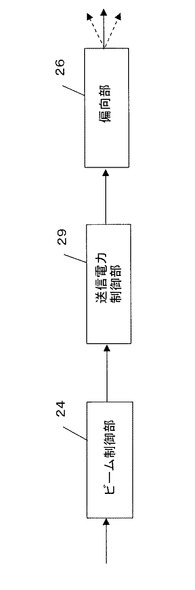
次に、本発明の第4実施形態について説明する。第4実施形態は送信電力制御方法に関するものである。図13は第4実施形態における送信部の構成図である。同図を参照すると、本発明に係る送信部13は第3実施形態(図10参照)のビーム幅制御部25の代わりに送信電力制御部29を備えている。なお、図13においても偏向部26を表示しているが、その理由は図10について述べたのと同様である。
【0076】
送信電力制御部29は受信側移動体との距離に応じて送信電力を制御する。これにより、送信側移動体は受信側移動体との距離に適した送信電力を用いて受信側移動体と通信することが可能となる。
【0077】
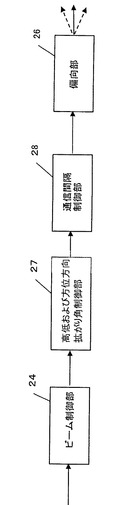
次に、本発明の第5実施形態について説明する。第5実施形態は送信ビームの高低および方位方向の拡がり角制御方法に関するものである。図14は第5実施形態における送信部の構成図である。
【0078】
図14を参照すると、本発明に係る送信部13は図3に示すビーム制御部24の後段に、送信ビームの高低および方位方向の拡がり角を制御する高低および方位方向拡がり角制御部27と、通信間隔を制御する通信間隔制御部28とを含んで構成される。なお、図14においても偏向部26を表示しているが、その理由は図10について述べたのと同様である。
【0079】
受信側移動体が送信側移動体の近傍に存在する場合に、受信側移動体が高機動(例えば、60度以上の角度で急上昇した場合等)、あるいは方位方向に機動した場合、送信側移動体から照射したビームが受信側移動体から外れる場合がある。
【0080】
なお、本実施形態の場合、移動体は地上を走行する車両を想定しているが、この場合の受信側移動体が高機動する場合の一例として、受信側移動体の直前に急勾配で上昇する坂道が存在する場合等が考えられる。
【0081】
このような場合に、上記のような近距離通信では、高低および方位方向拡がり角制御部27によりビームの高低方向および方位方向の拡がり角を広げる(例えば、3度から20度等に広げる)、あるいは通信間隔制御部28により通信間隔を比較的短くする(例えば、1秒間隔を0.1秒間隔等に短縮する)。なお、高低および方位方向拡がり角制御部27は高低および方位方向の両方の拡がり角を広げてもよいし、高低あるいは方位のうちの一方のみの拡がり角を広げてもよい。
【0082】
また、受信側移動体が高機動あるいは方位方向に機動するか否かは送信側移動体側で予測することが困難であるため、受信側移動体の位置が送信側移動体の位置の近傍のときは、送信側移動体がビームを広げ、遠方のときはビームを狭める。
【0083】
これにより、受信側移動体の位置が送信側移動体の位置の近傍にあり、受信側移動体が高機動あるいは方位方向に機動した場合でも、送信側移動体は受信側移動体をビームの中に捕らえることができる。なお、受信側移動体をビームの中に捕らえるのに必要なビームの拡がり角や通信間隔は、送信側移動体と受信側移動体間の距離や受信側移動体の機動の程度によって適宜変更される。
【0084】
以上説明したように、本発明の第5実施形態によれば、受信側移動体が高機動あるいは方位方向に機動した場合でも、送信側移動体は受信側移動体をビームの中に捕らえることが可能となる。
【0085】
次に、本発明の第6実施形態について説明する。第1実施形態では、受信側移動体がモノパルス測角を行う場合について示したが、送信側移動体がモノパルス測角を行いペンシルビームの照射方向を補正することも可能である。第6実施形態ではこのビームの方向制御方法の一例について述べる。
【0086】
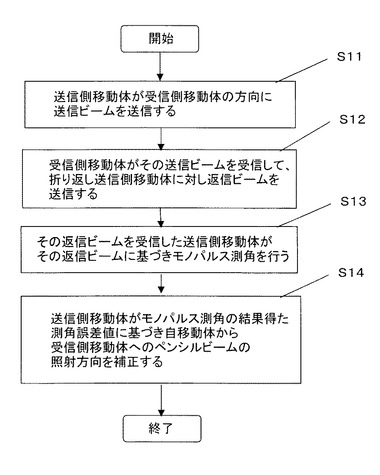
図15は本発明の第6実施形態の動作を示すフローチャートである。同図は送信側移動体がモノパルス測角を行う場合のビームの方向制御方法の一例を示している。
【0087】
同図を参照すると、まず、送信側移動体が受信側移動体の方向に送信ビームを送信する(ステップS11)。次に、受信側移動体がその送信ビームを受信して、折り返し受信側移動体に対し返信ビームを送信する(ステップS12)。次に、その返信ビームを受信した送信側移動体がその返信ビームに基づきモノパルス測角を行う(ステップS13)。そして、送信側移動体がモノパルス測角の結果得た誤差値に基づき、自移動体から受信側移動体へのペンシルビームの照射方向を補正する(ステップS14)。
【0088】
なお、モノパルス測角の動作自体は第1実施形態と同様であり、また送信側移動体側でモノパルス測角を行う部分は、送信側移動体側の受信部(図4参照)で第1実施形態と同様に行うことが可能である。したがって、第5実施形態における送信側移動体および受信側移動体の構成の説明は割愛する。
【0089】
以上説明したように、本発明の第6実施形態によれば、送信側移動体でモノパルス測角を行うことにより、送信側移動体のビームを正確に受信側移動体の方向に指向させることが可能となる。
【0090】
次に、本発明の第7実施形態について説明する。第7実施形態はビームの方向制御方法のプログラムに関するものである。図2に示すように、移動体はプログラム格納部18を有している。このプログラム格納部18には、図6および図15にフローチャートで示すビームの方向制御方法のプログラムが格納されている。移動体の制御部15(請求項10の"コンピュータ"に対応)はプログラム格納部18からそのプログラムを読み出し、そのプログラムにしたがって送信部13および受信部14を制御する。その制御方法については既に述べたので、ここでの説明は割愛する。
【0091】
なお、図6および図15に示すプログラムを送信側および受信側移動体の両者が有しており、送信側移動体にて、図6のステップS1およびS5の処理を行い、受信側移動体にて図6のステップS2〜S4の処理を行う。また、送信側移動体にて、図15のステップS11,S13,S14の処理を行い、受信側移動体にて図15のステップS12の処理を行う。
【0092】
以上説明したように、本発明の第7実施形態によれば、GPSが使用できず、したがってINSのみによって送信側および受信側移動体間の位置関係を演算しなければならない環境下において、送信側移動体が受信側移動体の方向に的確にビームを照射することが可能なプログラムを得ることが可能となる。
【0093】
上記の実施形態の一部または全部は、以下の付記のようにも記載されうるが、以下には限られない。
【0094】
(付記1) ペンシルビームを用いて移動体間で通信を行う移動体通信システムであって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御手段と、前記受信側移動体が前記送信ビームを受信部で受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角手段と、前記受信側移動体から前記送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知手段とを含み、前記ビーム制御手段は、前記受信側移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正する移動体通信システムであり、
前記送信側移動体は前記受信側移動体との距離に応じて送信ビームのビーム幅を制御するビーム幅制御手段を含むことを特徴とする移動体通信システム。
【0095】
(付記2) 前記送信側移動体は前記受信側移動体との距離に応じて送信ビームの送信電力を制御する送信電力制御手段を含むことを特徴とする付記1記載の移動体通信システム。
【0096】
(付記3) 前記送信側移動体は、前記受信側移動体が高機動あるいは方位方向に機動した場合、前記受信側移動体を捕らえるために前記送信ビームの高低方向および方位方向の拡がり角を制御する高低および方位方向拡がり角制御手段を含むことを特徴とする付記1または2記載の移動体通信システム。
【0097】
(付記4) 前記送信側移動体は、前記受信側移動体が高機動あるいは方位方向に機動した場合、前記受信側移動体を捕らえるために通信間隔を短くする通信間隔制御手段を含むことを特徴とする付記1から3のいずれかに記載の移動体通信システム。
【0098】
(付記5) 各移動体間でアドホックネットワークが形成されることを特徴とする付記1から4のいずれかに記載の移動体通信システム。
【0099】
(付記6) 各々の移動体は自己の位置情報をGPS(Global Positioning System )あるいはINS(Inertial Navigation System)から取得することを特徴とする付記1から5のいずれかに記載の移動体通信システム。
【0100】
(付記7) ペンシルビームを用いて移動体間で通信を行う移動体通信システムであって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御手段と、前記受信側移動体が前記送信ビームを受信して、折り返し前記送信側移動体に対し返信ビームを送信する返信ビーム送信手段と、前記返信ビームを受信した前記送信側移動体が前記返信ビームに基づきモノパルス測角を行うモノパルス測角手段と、前記送信側移動体がモノパルス測角の結果得た測角誤差値に基づき自移動体から前記受信側移動体へのペンシルビームの照射方向を補正する照射方向補正手段とを含むことを特徴とする移動体通信システム。
【0101】
(付記8) ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおける移動体であって、相手方移動体との距離に応じて送信ビームのビーム幅を制御するビーム幅制御手段を含むことを特徴とする移動体。
【0102】
(付記9) 前記相手方移動体との距離に応じて送信ビームの送信電力を制御する送信電力制御手段を含むことを特徴とする付記8記載の移動体。
【0103】
(付記10) 前記相手方移動体が高機動あるいは方位方向に機動した場合、前記相手方移動体を捕らえるために前記送信ビームの高低方向および方位方向の拡がり角を制御する高低および方位方向拡がり角制御手段を含むことを特徴とする付記8または9記載の移動体。
【0104】
(付記11) 前記相手方移動体が高機動あるいは方位方向に機動した場合、前記相手方移動体を捕らえるために通信間隔を短くする通信間隔制御手段を含むことを特徴とする付記8から10のいずれかに記載の移動体。
【0105】
(付記12) 移動体間でアドホックネットワークが形成されることを特徴とする付記8から11のいずれかに記載の移動体。
【0106】
(付記13) 各々の移動体は自己の位置情報をGPS(Global Positioning System )あるいはINS(Inertial Navigation System)から取得することを特徴とする付記8から12のいずれかに記載の移動体。
【0107】
(付記14) ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおけるビームの方向制御方法であって、送信側移動体は受信側移動体との距離に応じて送信ビームのビーム幅を制御するビーム幅制御ステップを含むことを特徴とするビームの方向制御方法。
【0108】
(付記15) 前記送信側移動体は前記受信側移動体との距離に応じて送信ビームの送信電力を制御する送信電力制御ステップを含むことを特徴とする付記14記載のビームの方向制御方法。
【0109】
(付記16) 前記送信側移動体は、前記受信側移動体が高機動あるいは方位方向に機動した場合、前記受信側移動体を捕らえるために前記送信ビームの高低方向および方位方向の拡がり角を制御する高低および方位方向拡がり角制御ステップを含むことを特徴とする付記14または15記載のビームの方向制御方法。
【0110】
(付記17) 前記送信側移動体は、前記受信側移動体が高機動あるいは方位方向に機動した場合、前記受信側移動体を捕らえるために通信間隔を短くする通信間隔制御ステップを含むことを特徴とする付記14から16のいずれかに記載のビームの方向制御方法。
【0111】
(付記18) 各移動体間でアドホックネットワークが形成されることを特徴とする付記14から17のいずれかに記載のビームの方向制御方法。
【0112】
(付記19) 各々の移動体は自己の位置情報をGPS(Global Positioning System )あるいはINS(Inertial Navigation System)から取得することを特徴とする付記14から18のいずれかに記載のビームの方向制御方法。
【0113】
(付記20) ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおけるビームの方向制御方法であって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御ステップと、前記受信側移動体が前記送信ビームを受信して、折り返し前記送信側移動体に対し返信ビームを送信する返信ビーム送信ステップと、前記返信ビームを受信した前記送信側移動体が前記返信ビームに基づきモノパルス測角を行うモノパルス測角ステップと、前記送信側移動体がモノパルス測角の結果得た測角誤差値に基づき自移動体から前記受信側移動体へのペンシルビームの照射方向を補正する照射方向補正ステップとを含むことを特徴とするビームの方向制御方法。
【産業上の利用可能性】
【0114】
本発明を、地上を走行する車両のみならず、航空機等の飛翔体に適用することが可能である。
【符号の説明】
【0115】
1〜4 移動体
11,12 アンテナ
13 送信部
14 受信部
15 制御部
16 GPS
17 INS
18 プログラム格納部
21 励振部
23 変調部
24 ビーム制御部
25 ビーム幅制御部
26 偏向部
27 上下方向拡がり角制御部
28 通信間隔制御部
29 送信電力制御部
32 受信部
32A 合成回路
33 復調部
34 モノパルス測角部
35 測角結果通知部
【特許請求の範囲】
【請求項1】
ペンシルビームを用いて移動体間で通信を行う移動体通信システムであって、
送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御手段と、
前記受信側移動体が前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角手段と、
前記受信側移動体から前記送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知手段とを含み、
前記ビーム制御手段は、前記受信側移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とする移動体通信システム。
【請求項2】
前記受信側移動体の受信部で受信された前記送信側移動体からの受信信号の振幅の和、高低および方位情報に基づき前記測角誤差値が算出されることを特徴とする請求項1記載の移動体通信システム。
【請求項3】
前記送信側移動体から前記受信側移動体に対し、前記送信ビームの送信が複数回行われ、
前記受信側移動体は前記モノパルス測角を複数回行った結果、前記測角誤差の積算値が所定閾値に達した場合に前記モノパルス測角の結果を前記送信側移動体に通知することを特徴とする請求項1または2記載の移動体通信システム。
【請求項4】
ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおける移動体であって、
自移動体に設けられ、相手方移動体の方向に送信ビームを送信するビーム送信手段と、
前記相手方移動体に設けられ、前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角手段と、
前記相手方移動体に設けられ、前記自移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知手段とを含み、
前記ビーム送信手段は、前記相手方移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とする移動体。
【請求項5】
前記相手方移動体の受信部で受信された前記自移動体からの受信信号の振幅の和、高低および方位情報に基づき前記測角誤差値が算出されることを特徴とする請求項4記載の移動体。
【請求項6】
前記自移動体から前記相手方移動体に対し、前記送信ビームの送信が複数回行われ、
前記相手方移動体は前記モノパルス測角を複数回行った結果、前記測角誤差の積算値が所定閾値に達した場合に前記モノパルス測角の結果を前記自移動体に通知することを特徴とする請求項4または5記載の移動体。
【請求項7】
ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおけるビームの方向制御方法であって、
送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御ステップと、
前記受信側移動体が前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角ステップと、
前記受信側移動体から前記送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知ステップとを含み、
前記ビーム制御ステップは、前記受信側移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とするビームの方向制御方法。
【請求項8】
前記受信側移動体の受信部で受信された前記送信側移動体からの受信信号の振幅の和、高低および方位情報に基づき前記測角誤差値が算出されることを特徴とする請求項7記載のビームの方向制御方法。
【請求項9】
前記送信側移動体から前記受信側移動体に対し、前記送信ビームの送信が複数回行われ、
前記受信側移動体は前記モノパルス測角を複数回行った結果、前記測角誤差の積算値が所定閾値に達した場合に前記モノパルス測角の結果を前記送信側移動体に通知することを特徴とする請求項7または8記載のビームの方向制御方法。
【請求項10】
ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおけるビームの方向制御方法を、コンピュータに実行させるためのプログラムであって、
送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御ステップと、
前記受信側移動体が前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角ステップと、
前記受信側移動体から前記送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知ステップとを含み、
前記ビーム制御ステップは、前記受信側移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とするプログラム。
【請求項1】
ペンシルビームを用いて移動体間で通信を行う移動体通信システムであって、
送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御手段と、
前記受信側移動体が前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角手段と、
前記受信側移動体から前記送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知手段とを含み、
前記ビーム制御手段は、前記受信側移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とする移動体通信システム。
【請求項2】
前記受信側移動体の受信部で受信された前記送信側移動体からの受信信号の振幅の和、高低および方位情報に基づき前記測角誤差値が算出されることを特徴とする請求項1記載の移動体通信システム。
【請求項3】
前記送信側移動体から前記受信側移動体に対し、前記送信ビームの送信が複数回行われ、
前記受信側移動体は前記モノパルス測角を複数回行った結果、前記測角誤差の積算値が所定閾値に達した場合に前記モノパルス測角の結果を前記送信側移動体に通知することを特徴とする請求項1または2記載の移動体通信システム。
【請求項4】
ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおける移動体であって、
自移動体に設けられ、相手方移動体の方向に送信ビームを送信するビーム送信手段と、
前記相手方移動体に設けられ、前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角手段と、
前記相手方移動体に設けられ、前記自移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知手段とを含み、
前記ビーム送信手段は、前記相手方移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とする移動体。
【請求項5】
前記相手方移動体の受信部で受信された前記自移動体からの受信信号の振幅の和、高低および方位情報に基づき前記測角誤差値が算出されることを特徴とする請求項4記載の移動体。
【請求項6】
前記自移動体から前記相手方移動体に対し、前記送信ビームの送信が複数回行われ、
前記相手方移動体は前記モノパルス測角を複数回行った結果、前記測角誤差の積算値が所定閾値に達した場合に前記モノパルス測角の結果を前記自移動体に通知することを特徴とする請求項4または5記載の移動体。
【請求項7】
ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおけるビームの方向制御方法であって、
送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御ステップと、
前記受信側移動体が前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角ステップと、
前記受信側移動体から前記送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知ステップとを含み、
前記ビーム制御ステップは、前記受信側移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とするビームの方向制御方法。
【請求項8】
前記受信側移動体の受信部で受信された前記送信側移動体からの受信信号の振幅の和、高低および方位情報に基づき前記測角誤差値が算出されることを特徴とする請求項7記載のビームの方向制御方法。
【請求項9】
前記送信側移動体から前記受信側移動体に対し、前記送信ビームの送信が複数回行われ、
前記受信側移動体は前記モノパルス測角を複数回行った結果、前記測角誤差の積算値が所定閾値に達した場合に前記モノパルス測角の結果を前記送信側移動体に通知することを特徴とする請求項7または8記載のビームの方向制御方法。
【請求項10】
ペンシルビームを用いて移動体間で通信を行う移動体通信システムにおけるビームの方向制御方法を、コンピュータに実行させるためのプログラムであって、
送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御ステップと、
前記受信側移動体が前記送信ビームを受信し、受信した前記送信ビームに基づきモノパルス測角を行うモノパルス測角ステップと、
前記受信側移動体から前記送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知ステップとを含み、
前記ビーム制御ステップは、前記受信側移動体から取得した測角誤差値に基づき前記ペンシルビームの照射方向を補正することを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−34136(P2013−34136A)
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願番号】特願2011−169702(P2011−169702)
【出願日】平成23年8月3日(2011.8.3)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.INS
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願日】平成23年8月3日(2011.8.3)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.INS
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]