
移動体通信システムおよび航空移動局
【課題】航空移動局と地上局のデータ通信において、高容量で安定した移動体通信システムおよび航空移動局を提供する。
【解決手段】複数の航空移動局と、複数の地上局とから構成され、地上局と航空移動局間の通信を地対空ネットワークにより形成し、時分割多重により各地上局へタイムスロットを割り当て、地上局から航空移動局への片方向通信を行なう。また、航空移動局同士の相互通信を航空移動局間ネットワークにより形成し、時分割多重により各航空移動局へタイムスロットを割当て、航空移動局相互の双方向通信を行なう。
【解決手段】複数の航空移動局と、複数の地上局とから構成され、地上局と航空移動局間の通信を地対空ネットワークにより形成し、時分割多重により各地上局へタイムスロットを割り当て、地上局から航空移動局への片方向通信を行なう。また、航空移動局同士の相互通信を航空移動局間ネットワークにより形成し、時分割多重により各航空移動局へタイムスロットを割当て、航空移動局相互の双方向通信を行なう。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体通信システムおよび航空移動局に係り、特に航空機を移動体とする移動体通信システムおよび航空移動局に関する。
【背景技術】
【0002】
時分割多元接続通信技術を使用した移動体通信システムとして、特許文献1がある。航空機と地上局との通信においては、地上固定局の見通し距離内に存在する航空移動局と地上固定局を、ひとつのネットワークにより時分割により送信機会すなわちタイムスロットを割り当てる。つまり、地上局の通信覆域をセルとし、その範囲内に存在する航空局と地上固定局でひとつのネットワークを構成する。
【0003】
無線回線において、時分割多元接続方式を用いた通信では送信できる総伝送量が限られる。このため、加入局数の増加、伝送量の増加、更新周期の増加に対し運用に必要とする伝送を行なうことが困難になる。
【0004】
また、特許文献1に開示された技術では、航空機がセルを移動した場合、一旦ネットワークから離脱し、次のセルに加入する必要がある。高機動飛行(高速且つ急激な姿勢変化を伴なう飛行)を行なう航空機の場合、セルの境界領域において、ネットワークへの離脱、加入を何度も繰り返す場合がある。このような状況では、情報の欠落が発生する。
【0005】
また、航空機群において、各航空機の位置関係に基づいて、ネットワークから離脱、加入するタイミングが異なる。このため、一時的に異なるネットワークに加入することになる。結果的に、同一の航空機群内で情報共有ができず、有効な運用が行なえない。
【0006】
また、航空機における通信において主に使用される空中線は、無指向性であり、単一で使用される。このような場合、機体自身の遮蔽により空中線取付位置の反対側を飛行する航空機との通信は困難な状況である。複数航空機による群飛行を行なう場合、空中線取付位置側に位置する航空機とは通信できるが、反対側に位置する航空機とは通信できない。この結果、群内での情報共有および意思疎通が図れない問題点がある。
【0007】
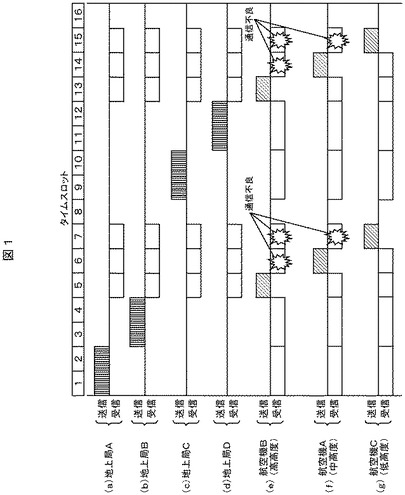
図1を参照して、従来の時分割多元接続通信技術を用いた4局の地上局と3機の航空機との間のタイムチャートを説明する。図1において、図1(a)は地上局Aの送信と受信のタイムチャートである。図1(b)は地上局Bの送信と受信のタイムチャートである。図1(c)は地上局Cの送信と受信のタイムチャートである。図1(d)は地上局Dの送信と受信のタイムチャートである。図1(e)は航空機Aの送信と受信のタイムチャートである。図1(f)は航空機Bの送信と受信のタイムチャートである。図1(g)は航空機Cの送信と受信のタイムチャートである。
【0008】
図1において、各地上局と、各航空機とは、単一のネットワークで接続されている。また、各航空機は、機体の下方に空中線を設置している。このように、各航空機が機体の下方に空中線を設置しているのは、飛行時に地上局と交信するためである。航空機は、航空機Aが中高度に位置し、航空機Bが高高度に位置し、航空機Cが低高度に位置する。
【0009】
図1において、タイムスロット1、2は、地上局Aが送信し、航空機A〜航空機Cが受信する。タイムスロット3、4は、地上局Bが送信し、航空機A〜航空機Cが受信する。タイムスロット9、10は、地上局Cが送信し、航空機A〜航空機Cが受信する。タイムスロット11、12は、地上局Dが送信し、航空機A〜航空機Cが受信する。
【0010】
一方、タイムスロット5、13は、高高度の航空機Bが送信し、地上局A〜地上局Dと、航空機A、航空機Cが受信する。タイムスロット6、14は、中高度の航空機Aが送信し、地上局A〜地上局Dと、航空機B、航空機Cが受信する。タイムスロット7、15は、低高度の航空機Cが送信し、地上局A〜地上局Dと、航空機A、航空機Bが受信する。しかし、航空機A〜航空機Cの空中線は、機体の下方に設置されているので、航空機A、Bは、下方の航空機から送信された送信波を受信できない。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2000−49738号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
以上のように既存の無線回線を使用する移動体通信システムでは、伝送できる容量に限界がある。このため加入局数、伝送情報量は、航空機での運用に十分ではない。
【0013】
また、既存の移動体通信システムは、航空機が隣接するセルへ移動するごとにネットワークを再構築することになる。また、航空機がセル境界領域において高機動飛行を行なうと、航空機は、ネットワークからの離脱、加入を頻繁に繰り返し、その間の情報が欠落してしまう。
【0014】
本発明は、上記の課題を解決するためになされたものであり、航空機を移動体とする移動体通信システムにおいて、必要な伝送容量の通信を実現する。また、広範囲にわたり安定した移動体通信システムおよび航空移動局を提供することを目的とする。
【課題を解決するための手段】
【0015】
上述した課題は、複数の航空移動局と、複数の地上局とから構成され、地上局から航空機局への第1のデータ送信に用いる第1のネットワークと、複数の航空移動局間の第2のデータ交換および航空移動局から地上局への第2のデータ送信に用いる第2のネットワークとから構成される移動体通信システムにより、達成できる。
【0016】
また、第1の受信部と、第2の受信部と、送信部とを備え、第1の受信部は、地上局からの無線信号を常時受信し、送信部は、予め定めたタイミングで送信し、第2の受信部は、タイミング以外の期間受信する航空移動局により、達成できる。
【発明の効果】
【0017】
本発明によれば、航空機を移動体とする移動体通信システムにおいて、大容量伝送通信を提供することができる。また、広域にわたって通信が途絶することがない安定したネットワーク接続が可能な移動体通信システムおよび航空移動局を提供することができる。
【図面の簡単な説明】
【0018】
【図1】従来の地上局と飛行機の送受信のタイムチャートである。
【図2】移動体通信システムの構成を説明するブロック図である。
【図3】航空機に搭載される通信装置のブロック図である。
【図4】地上局のブロック図である。
【図5A】伝送フレーム構成および伝送方法を説明するタイムチャート(その1)である。
【図5B】伝送フレーム構成および伝送方法を説明するタイムチャート(その2)である。
【図6】航空機群の位置関係と空中線覆域を説明する図である。
【図7】地上局と飛行機の送受信のタイムチャートである。
【図8】中継運用を説明するブロック図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態について、実施例を用い図面を参照しながら詳細に説明する。なお、実質同一部位には同じ参照番号を振り、説明は繰り返さない。
【実施例1】
【0020】
まず、図2を参照して、移動体通信システムの構成を説明する。図2において、移動体通信システム100は、管制所5と、3局の地上局4と、地対空ネットワーク2と、2つの航空機間ネットワーク1と、8機の航空機とから、構成される。
【0021】
地対空ネットワーク2は、地上局4から航空機3へ情報を伝送する。航空機間ネットワーク1−1、1−2は、航空機3相互の情報交換を行なうためのネットワークである。管制所5は、航空機の運用を統制する。地上局4は、地上局の電波覆域が航空機の活動領域を網羅するようにここでは3局配置されている。また、個々の地上局4の電波覆域が重複するように各々配置される。
【0022】
管制所5は、航空機3の運用に必要な航跡情報を生成し、航跡の位置に応じて送信する地上局4を割り当てる。また、管制所5は、航空機3に対する指令情報を作成し、航空機3の活動位置に応じて送信すべき地上局4を割り当てる。
【0023】
地対空ネットワーク2は、地上局4と航空機3によりネットワークを構成している。この地対空ネットワーク2を通じて、各地上局4から全航空機3に対して、管制所5が確立した航跡情報の一斉放送および各航空機3に対する指令情報などを伝送する。
【0024】
地上局4は、航跡情報について、どの航空機でも受信可能なように一斉放送する。一方、指令情報について、地上局4は、航空機3個々に対して送信先アドレスを付与した1対1伝送を行なう。なお、指令情報について、地上局4は、航空機3の群に対してマルチキャストアドレスを付与した1対n伝送を行なうこともある。
地対空ネットワーク2は、時分割多元接続方式により地上局4に各々タイムスロットを割り当て、地上局4から飛行機3への、一方向の送信を行なう。
【0025】
一方、航空機間ネットワーク1−1は、航空機3−5〜3−8によりネットワークを構成し、この航空機間ネットワーク1−1を通じて、航空機3−5〜3−8は、相互通信を行なう。同様に、航空機間ネットワーク1−2は、航空機3−1〜3−4によりネットワークを構成し、この航空機間ネットワーク1−2を通じて、航空機3−1〜3−4は、相互通信を行なう。
【0026】
図2では、2つの航空機間ネットワーク1−1、1−2を示しているが、運用する航空機数および業務に応じて同一活動エリア内に1つまたは3つ以上の航空機間ネットワークを有することができる。
【0027】
航空機間ネットワーク1は、時分割多元接続方式により各航空機3にタイムスロットを割り当て、双方向通信を行なう。航空機間ネットワーク1により送信するデータは、自機が保有するレーダ航跡情報、ステータス情報、自機位置情報、群内のリーダからの指令情報などにより構成される。
【0028】
各航空機3が送信するレーダ航跡情報、ステータス情報、位置情報は、すべての航空機3および地上局4で受信可能なように一斉放送とする。群内の指令情報は、送信先アドレスを付与し送信する。なお、図2において、地上局4が受信する各航空機3からのレーダ航跡情報、ステータス情報、位置情報を示す矢印は、図示していない。
【0029】
航空機3−5〜3−8は、地対空ネットワーク2と航空機間ネットワーク1−1の双方のネットワークに加入し、地上局4は、地対空ネットワーク2に加入し、戦術移動体通信ネットワークを実現する。また、地上局4は、航空機間ネットワーク1−1のチャネルに同調した受信装置を備える。これにより、管制所5は、航空機3相互の通信を地上局がモニタ(受信)することができる。これによって、航空機3から管制所5へのダウンリンクを行なうことなく、各航空機3のステータス情報、航空機位置情報、レーダ航跡情報を管制所5が把握することができる。ダウンリンクが不要であるため、ダウンリンク期間を航跡情報等の伝送に割り振ることができる。この結果、効率のよいネットワーク100が構築できる。
【0030】
地対空ネットワーク2と航空機間ネットワーク1−1、1−2は、相互の干渉を防ぐためタイムスロットについて、GPS時刻を基に双方のネットワークは同期させている。また、各ネットワークで使用する送受信周波数は、干渉が生じないよう制御された周波数を使用した周波数ホッピングパターンを使用する。また、航空機間ネットワーク1間では、各々異なる周波数ホッピングパターンを使用する。これにより、相互干渉を回避する。
【0031】
航空機3において、2つのネットワークを通じ受信した航跡情報、僚機ステータス情報等を基に、パイロットは、周辺状況の把握が可能である。また管制所5において、管制官も航空機の状況が把握できる。この結果、効果的な運用が行なえる。
【0032】
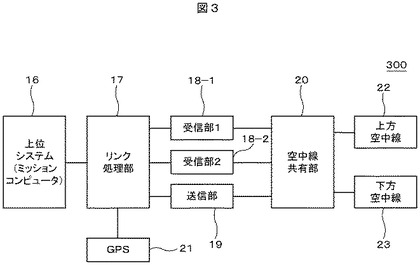
図3を参照して、航空機3における2系統のネットワーク通信を同時に実現する構成を説明する。図3において、航空機3に搭載される通信装置300は、上位システムであるミッションコンピュータ16と、リンク処理部17と、2系統の受信部18と、送信部19と、空中線共有部20と、上方空中線22と、下方空中線23と、GPS(Global Positioning System)受信機21とから、構成される。
【0033】
受信部18−1は、航空機間ネットワーク1からの無線信号を受信する。受信部18−2は、地対空ネットワーク2からの無線信号を受信する。送信部19は、航空機間ネットワーク1に送信する。上方空中線22は、機体上方から/への無線信号を送受信する。下方空中線23は、機体下方から/への無線信号を送受信する。空中線共用部20は、受信部18−1と送信部19おのおのに対し、タイムスロットに応じて上方空中線22または下方空中線23を切り替え接続する。空中線共用部20は、受信部18−2を下方空中線23に固定接続する。
【0034】
GPS受信機21が受信したGPS時刻は、タイムスロット制御および周波数ホッピングの同期確立の基準とする。リンク処理部17は、送受信データの伝送制御を行なう。上位システム16は、送信データを生成する。上位システム16は、また受信データをパイロットへ伝達する。
【0035】
地対空ネットワーク受信のために使用される受信部18−1は、常時受信状態に設定する。また、他方の受信部18−2と送信部19とは、半二重通信で使用される。送信部19は、自機に割り当てられたタイムスロットで送信を行なう。受信部18−2は、自機に割り当てられたタイムスロット以外で受信を行なう。
【0036】
空中線共用部20は、2系統の空中線の切り替え制御を行なう。空中線共用部20は、同時に、自機の送信部19が出力する送信波が受信部18−1に回り込み、干渉を与えないようフィルタとしての機能を有している。
【0037】
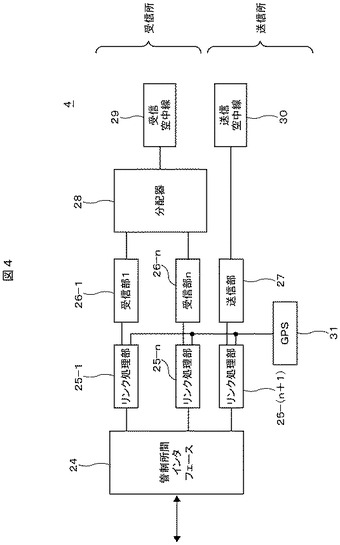
図4を参照して、地上局の構成を説明する。図4において、地上局4は、管制所間インタフェース24と、n+1系統のリンク処理部25と、n系統の受信部26と、送信部27と、分配器28と、受信空中線29と、送信空中線30と、GPS受信機31とから構成される。ここで、nは自然数である。
【0038】
送信部27は、送信空中線30から、地対空ネットワークへの送信を行なう。リンク処理部25−(n+1)は、通信制御を行なう。管制所間インタフェース24は、管制所との間の情報の授受を行なう。リンク処理部25−(n+1)、送信部27、管制所間インタフェース24は、送信機能を実現する。これらの構成は、送信所に設置される。
【0039】
一方、受信所は、受信空中線29、分配器28、n台の受信部26、n台のリンク処理部25で構成される。空中線29は、航空機間ネットワーク1から航空機3の交信電波を受信する。受信部26およびリンク処理部25は、航空機間ネットワーク1毎に周波数ホッピングパターンが異なるため、存在する航空機間ネットワークの数(n)の系統を備える。また、分配器28は、単一の空中線29からの受信信号を各受信部25へ振り分ける。リンク処理部25は、通信制御を行なう。
【0040】
GPS受信機31が受信したGPS時刻は、タイムスロット制御および周波数ホッピングの同期確立の基準とする。空中線29、30は、複数の航空機が地上局位置に対し色々な方角を同時に飛行するため、水平無指向性方式の空中線を使用する。
【0041】
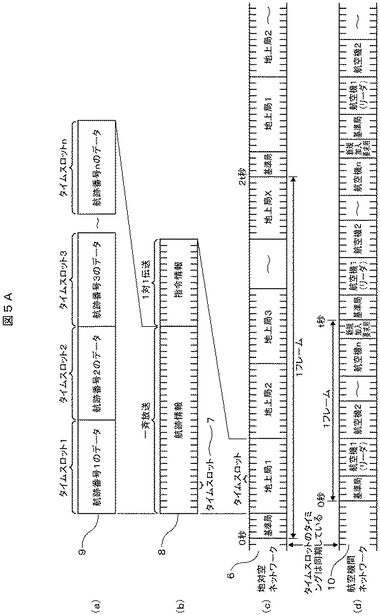
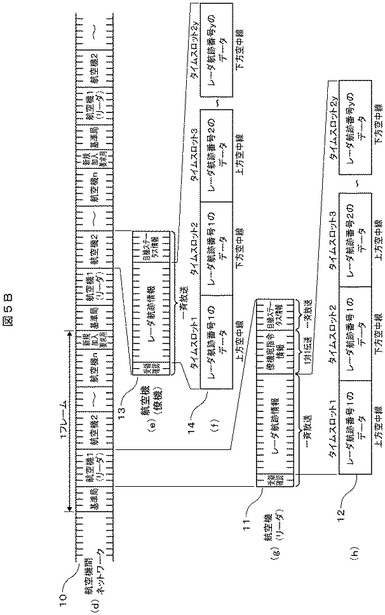
図5を参照して、伝送フレーム構成および伝送方法を説明する。図5において、図5(a)は航跡情報である。図5(b)は地上局の送信データである。図5(c)は地対空ネットワークのフレーム構成である。図5(d)は航空機間ネットワークのフレーム構成である。図5(e)は僚機の送信データである。図5(f)は僚機のレーダ航跡情報である。図5(g)はリーダ機の送信データである。図5(h)はリーダ機のレーダ航跡情報である。
【0042】
図5A(c)において、地対空ネットワーク2は、前述したように時分割多元接続方式であり、2t秒を1周期とする。タイムフレームは、複数のタイムスロット7により構成され、基準局、地上局1から地上局Xの送信局にタイムスロットを割り当てる。基準局は、地上局のうちの代表局である。基準局は、ネットワーク管理のために必要な情報の伝送を行なう。地対空ネットワーク2のタイムスロットは、後述する図5(d)の航空機間ネットワークのタイムスロットとタイミング同期している。
【0043】
図5A(b)において、地上局1からの送信データ8は、航跡情報と指令情報が含まれ、それぞれ一斉放送、およびアドレス付けした1対1伝送である。さらに、図5A(a)において、航跡情報9は、航跡番号1から航跡番号nまでの複数の航跡情報から構成され、ひとつのタイムスロットで1航跡情報の伝送を行なう。なお、各地上局に割り当てるタイムスロット数は、伝送する航跡情報数、または指令情報の数により変更が可能である。
【0044】
図5B(d)において、航空機間ネットワ−ク1は、前述のように時分割多元接続方式であり、t秒を1周期とする。タイムフレームは、複数のタイムスロット7により構成される。タームフレームは、基準局、航空機1から航空機nの送信局にタイムスロットを割り当てる。基準局は航空機のうちの代表機であり、ネットワーク管理のために必要な情報の伝送を行うものである。また、ネットワークに新規加入を必要とする航空機が、加入要求を送信するスロットを備える。
【0045】
航空機3は、リーダ機と僚機(従属機)では伝送する内容が異なる。図5B(g)において、リーダ機の送信データ11は、レーダ航跡情報、僚機宛指令情報、自機ステータス情報および受領確認により構成される。
【0046】
レーダ航跡情報は、自機のレーダで取得した航跡情報を僚機に対して伝送し、情報の共有を図るものである。リーダ機のレーダ航跡情報12は、レーダ航跡番号1からyまでの情報を一斉放送形式で送信する。yは自然数であり、レーダ航跡情報数である。
【0047】
レーダ航跡情報の伝送においては、リーダ機のレーダ航跡情報に12示すように1航跡あたり2タイムスロットを使用し、同じ情報を2回送信している。これは、接続する空中線を上方、下方で切り替えを実施し、送信を行うためである。
【0048】
また、自機ステータス情報は、自己の位置、残燃料、残燃料等の状態を各航空機へ伝送するものであり一斉放送形式にて送信される。また、僚機宛指令情報は、リーダ機のみが送信するものであり、僚機に対して指示を与えるために1対1伝送をするものである。さらに、受領確認は、地上局からの指令情報に対する受領可否、リーダ機からの僚機宛指令情報に対する受領可否について一斉放送形式で送信する。
【0049】
一方、僚機の送信データ14は、図5B(e)において、レーダ航跡情報、自機ステータス情報および受領確認により構成される。僚機の送信データ14は、僚機宛指令情報がないことを除いて、リーダ機の送信データ11と同じなので、説明を省く。これは、図5B(f)の僚機のレーダ航跡情報についても同様である。
【0050】
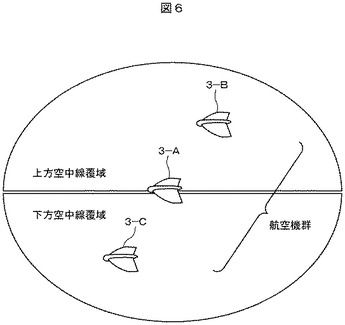
図6を参照して、以下の説明で前提となる航空機群の位置関係を説明する。図6において、航空機群は、3機の航空機3−A〜3−Cにて構成される。航空機3−Aの上方に航空機3−Bが飛行している。また、航空機3−Aの下方に航空機3−Cが飛行している。
【0051】
航空機3−Aを基準とすると、航空機3−Bは、航空機3−Aの上方空中線覆域を飛行している。また、航空機3−Cは、航空機3−Aの下方空中線覆域を飛行している。したがって、航空機3−Aは、航空機3−Bとの通信に、上方空中線22を用いる。また、航空機3−Aは、航空機3−Cとの通信に、下方空中線23を用いる。
【0052】
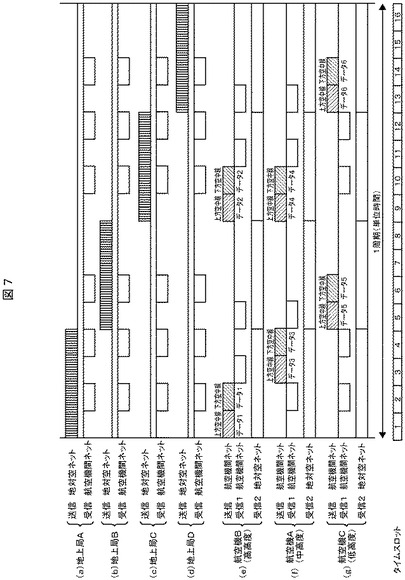
図7を参照して、時分割多元接続通信技術を用いた4局の地上局と3機の航空機との間のタイムチャートを説明する。図7において、図7(a)は地上局Aの送信と受信のタイムチャートである。図7(b)は地上局Bの送信と受信のタイムチャートである。図7(c)は地上局Cの送信と受信のタイムチャートである。図7(d)は地上局Dの送信と受信のタイムチャートである。図7(e)は航空機Aの送信と受信のタイムチャートである。図7(f)は航空機Bの送信と受信のタイムチャートである。図7(g)は航空機Cの送信と受信のタイムチャートである。
【0053】
図7において、各地上局と、各航空機とは、地対空ネットワークと、航空機間のネットワークで接続されている。また、各航空機は、機体の下方に下方空中線、機体の上方に上方空中線を設置している。航空機は、図6で説明したように、航空機Aが中高度に位置し、航空機Bが高高度に位置し、航空機Cが低高度に位置する。
【0054】
図7において、地上局Aは、タイムスロット1〜4で地対空ネットワーク2に送信する。地上局Bは、タイムスロット5〜8で地対空ネットワーク2に送信する。地上局Cは、タイムスロット9〜12で地対空ネットワーク2に送信する。地上局Dは、タイムスロット13〜16で地対空ネットワーク2に送信する。
【0055】
航空機Bは、タイムスロット1、9で上方空中線22から航空機間ネットワーク1に送信する。航空機Bは、タイムスロット2、10で下方空中線23から航空機間ネットワーク1に送信する。航空機Aは、タイムスロット3、11で上方空中線22から航空機間ネットワーク1に送信する。航空機Aは、タイムスロット4、12で下方空中線23から航空機間ネットワーク1に送信する。航空機Cは、タイムスロット5、13で上方空中線22から航空機間ネットワーク1に送信する。航空機Cは、タイムスロット6、14で下方空中線23から航空機間ネットワーク1に送信する。
航空機A〜Bは、連続する2タイムスロットにおいて、同一データを空中線を切り替えて送信する。
【0056】
地上局A〜Dは、航空機A〜Cの下方空中線23から送信された電波を受信する。
航空機Bは、航空機Aおよび航空機Cの上方空中線22から送信された電波を受信する。航空機Aは、航空機Cの上方空中線22から送信された電波を受信する。また、航空機Aは、航空機Bの下方空中線23から送信された電波を受信する。航空機Cは、航空機Aおよび航空機Bの下方空中線22から送信された電波を受信する。航空機A〜Cは、各タイムスロットで、地上局A〜Dから送信された電波を受信する。
なお、図7は理想的な受信状態を記載しており、航空機からの電波を特定の地上局のみ受信する場合もある。逆に、航空機は、特定の地上局の電波のみしか受信できない場合もある。
【0057】
図7を図1と対比することにより、本実施例において、航空機間の通信不良を解消し、地上局との通信量を確保することができることは、明確である。
航空機の活動エリア内の全ての地上局を、ひとつの地対空ネットワークに所属させることにより、航空機がひとつの地上局の電波覆域から隣接する地上局の電波覆域へ移動するような場合においても、ネットワークからの離脱、加入の手続きが不要である。このため通信が途切れることなく安定した運用が可能となる。
【0058】
地上局Aから航空機Cまでの全参加局の総送信機会は、図1に比べ2倍とすることができる。また、飛行位置関係に基づく通信不良の発生が回避できるため、情報の損失のない伝送が実現でき、より多くの情報伝送が可能となる。
以上のように、本実施例によれば、効率的で通信途絶を回避した安定な移動体通信を実現することが可能である。
【実施例2】
【0059】
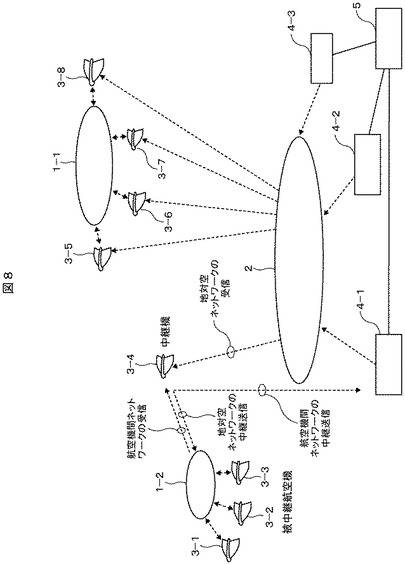
図8を参照して、航空機の一部が地上局の電波覆域を逸脱し運用する中継運用を説明する。図8において、航空機3−1〜3−3が、地上局の通信覆域外へ逸脱または山陰などの電波の到達しない空域を飛行するような場合、指定された航空機3−4は、中継局となる。航空機3−4は、地上局4から送信される地対空ネットワーク2のデータについて、通信覆域外へ逸脱した航空機群(被中継機と言う)3−1〜3−3へ中継する。航空機3−4は、また被中継機群の航空機間ネットワーク1−2のデータを地上局4へ中継する。 中継運用を行なう場合、受信部18−1は、地対空ネットワークからのデータを受信する。受信部18−2は、被中継航空機群からの航空機間ネットワークデータを受信する。送信部は、地対空ネットワークから受信したデータのうち被中継群へ中継するデータと、被中継群の航空機間ネットワークデータを時分割多重で送信する。
【0060】
本実施例に拠れば、航空機の一部が地上局の電波覆域を逸脱する場合も、効率的で通信途絶を回避した安定な移動体通信を実現することが可能である。
【符号の説明】
【0061】
1…航空機間ネットワーク、2…地対空ネットワーク、3…航空機、4…地上局、5…管制所、6…地対空ネットワークのタイムフレーム、7…タイムスロット、8…地上局送信データ、9…地上局送信航跡情報、10…航空機間ネットワークのタイムフレーム、11…リーダ機の送信データ、12…リーダ機の送信航跡情報、13…僚機の送信データ、14…僚機の送信航跡情報、16…上位システム、17…リンク処理部、18…受信部、19…送信部、20…空中線共用部、21…GPS、22…上方空中線、23…下方空中線、24…管制所間インタフェース、25…リンク処理部、26…受信部、27…送信部、28…分配器、29…受信空中線、30…送信空中線、100…移動体通信システム、300…通信装置。
【技術分野】
【0001】
本発明は、移動体通信システムおよび航空移動局に係り、特に航空機を移動体とする移動体通信システムおよび航空移動局に関する。
【背景技術】
【0002】
時分割多元接続通信技術を使用した移動体通信システムとして、特許文献1がある。航空機と地上局との通信においては、地上固定局の見通し距離内に存在する航空移動局と地上固定局を、ひとつのネットワークにより時分割により送信機会すなわちタイムスロットを割り当てる。つまり、地上局の通信覆域をセルとし、その範囲内に存在する航空局と地上固定局でひとつのネットワークを構成する。
【0003】
無線回線において、時分割多元接続方式を用いた通信では送信できる総伝送量が限られる。このため、加入局数の増加、伝送量の増加、更新周期の増加に対し運用に必要とする伝送を行なうことが困難になる。
【0004】
また、特許文献1に開示された技術では、航空機がセルを移動した場合、一旦ネットワークから離脱し、次のセルに加入する必要がある。高機動飛行(高速且つ急激な姿勢変化を伴なう飛行)を行なう航空機の場合、セルの境界領域において、ネットワークへの離脱、加入を何度も繰り返す場合がある。このような状況では、情報の欠落が発生する。
【0005】
また、航空機群において、各航空機の位置関係に基づいて、ネットワークから離脱、加入するタイミングが異なる。このため、一時的に異なるネットワークに加入することになる。結果的に、同一の航空機群内で情報共有ができず、有効な運用が行なえない。
【0006】
また、航空機における通信において主に使用される空中線は、無指向性であり、単一で使用される。このような場合、機体自身の遮蔽により空中線取付位置の反対側を飛行する航空機との通信は困難な状況である。複数航空機による群飛行を行なう場合、空中線取付位置側に位置する航空機とは通信できるが、反対側に位置する航空機とは通信できない。この結果、群内での情報共有および意思疎通が図れない問題点がある。
【0007】
図1を参照して、従来の時分割多元接続通信技術を用いた4局の地上局と3機の航空機との間のタイムチャートを説明する。図1において、図1(a)は地上局Aの送信と受信のタイムチャートである。図1(b)は地上局Bの送信と受信のタイムチャートである。図1(c)は地上局Cの送信と受信のタイムチャートである。図1(d)は地上局Dの送信と受信のタイムチャートである。図1(e)は航空機Aの送信と受信のタイムチャートである。図1(f)は航空機Bの送信と受信のタイムチャートである。図1(g)は航空機Cの送信と受信のタイムチャートである。
【0008】
図1において、各地上局と、各航空機とは、単一のネットワークで接続されている。また、各航空機は、機体の下方に空中線を設置している。このように、各航空機が機体の下方に空中線を設置しているのは、飛行時に地上局と交信するためである。航空機は、航空機Aが中高度に位置し、航空機Bが高高度に位置し、航空機Cが低高度に位置する。
【0009】
図1において、タイムスロット1、2は、地上局Aが送信し、航空機A〜航空機Cが受信する。タイムスロット3、4は、地上局Bが送信し、航空機A〜航空機Cが受信する。タイムスロット9、10は、地上局Cが送信し、航空機A〜航空機Cが受信する。タイムスロット11、12は、地上局Dが送信し、航空機A〜航空機Cが受信する。
【0010】
一方、タイムスロット5、13は、高高度の航空機Bが送信し、地上局A〜地上局Dと、航空機A、航空機Cが受信する。タイムスロット6、14は、中高度の航空機Aが送信し、地上局A〜地上局Dと、航空機B、航空機Cが受信する。タイムスロット7、15は、低高度の航空機Cが送信し、地上局A〜地上局Dと、航空機A、航空機Bが受信する。しかし、航空機A〜航空機Cの空中線は、機体の下方に設置されているので、航空機A、Bは、下方の航空機から送信された送信波を受信できない。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2000−49738号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
以上のように既存の無線回線を使用する移動体通信システムでは、伝送できる容量に限界がある。このため加入局数、伝送情報量は、航空機での運用に十分ではない。
【0013】
また、既存の移動体通信システムは、航空機が隣接するセルへ移動するごとにネットワークを再構築することになる。また、航空機がセル境界領域において高機動飛行を行なうと、航空機は、ネットワークからの離脱、加入を頻繁に繰り返し、その間の情報が欠落してしまう。
【0014】
本発明は、上記の課題を解決するためになされたものであり、航空機を移動体とする移動体通信システムにおいて、必要な伝送容量の通信を実現する。また、広範囲にわたり安定した移動体通信システムおよび航空移動局を提供することを目的とする。
【課題を解決するための手段】
【0015】
上述した課題は、複数の航空移動局と、複数の地上局とから構成され、地上局から航空機局への第1のデータ送信に用いる第1のネットワークと、複数の航空移動局間の第2のデータ交換および航空移動局から地上局への第2のデータ送信に用いる第2のネットワークとから構成される移動体通信システムにより、達成できる。
【0016】
また、第1の受信部と、第2の受信部と、送信部とを備え、第1の受信部は、地上局からの無線信号を常時受信し、送信部は、予め定めたタイミングで送信し、第2の受信部は、タイミング以外の期間受信する航空移動局により、達成できる。
【発明の効果】
【0017】
本発明によれば、航空機を移動体とする移動体通信システムにおいて、大容量伝送通信を提供することができる。また、広域にわたって通信が途絶することがない安定したネットワーク接続が可能な移動体通信システムおよび航空移動局を提供することができる。
【図面の簡単な説明】
【0018】
【図1】従来の地上局と飛行機の送受信のタイムチャートである。
【図2】移動体通信システムの構成を説明するブロック図である。
【図3】航空機に搭載される通信装置のブロック図である。
【図4】地上局のブロック図である。
【図5A】伝送フレーム構成および伝送方法を説明するタイムチャート(その1)である。
【図5B】伝送フレーム構成および伝送方法を説明するタイムチャート(その2)である。
【図6】航空機群の位置関係と空中線覆域を説明する図である。
【図7】地上局と飛行機の送受信のタイムチャートである。
【図8】中継運用を説明するブロック図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態について、実施例を用い図面を参照しながら詳細に説明する。なお、実質同一部位には同じ参照番号を振り、説明は繰り返さない。
【実施例1】
【0020】
まず、図2を参照して、移動体通信システムの構成を説明する。図2において、移動体通信システム100は、管制所5と、3局の地上局4と、地対空ネットワーク2と、2つの航空機間ネットワーク1と、8機の航空機とから、構成される。
【0021】
地対空ネットワーク2は、地上局4から航空機3へ情報を伝送する。航空機間ネットワーク1−1、1−2は、航空機3相互の情報交換を行なうためのネットワークである。管制所5は、航空機の運用を統制する。地上局4は、地上局の電波覆域が航空機の活動領域を網羅するようにここでは3局配置されている。また、個々の地上局4の電波覆域が重複するように各々配置される。
【0022】
管制所5は、航空機3の運用に必要な航跡情報を生成し、航跡の位置に応じて送信する地上局4を割り当てる。また、管制所5は、航空機3に対する指令情報を作成し、航空機3の活動位置に応じて送信すべき地上局4を割り当てる。
【0023】
地対空ネットワーク2は、地上局4と航空機3によりネットワークを構成している。この地対空ネットワーク2を通じて、各地上局4から全航空機3に対して、管制所5が確立した航跡情報の一斉放送および各航空機3に対する指令情報などを伝送する。
【0024】
地上局4は、航跡情報について、どの航空機でも受信可能なように一斉放送する。一方、指令情報について、地上局4は、航空機3個々に対して送信先アドレスを付与した1対1伝送を行なう。なお、指令情報について、地上局4は、航空機3の群に対してマルチキャストアドレスを付与した1対n伝送を行なうこともある。
地対空ネットワーク2は、時分割多元接続方式により地上局4に各々タイムスロットを割り当て、地上局4から飛行機3への、一方向の送信を行なう。
【0025】
一方、航空機間ネットワーク1−1は、航空機3−5〜3−8によりネットワークを構成し、この航空機間ネットワーク1−1を通じて、航空機3−5〜3−8は、相互通信を行なう。同様に、航空機間ネットワーク1−2は、航空機3−1〜3−4によりネットワークを構成し、この航空機間ネットワーク1−2を通じて、航空機3−1〜3−4は、相互通信を行なう。
【0026】
図2では、2つの航空機間ネットワーク1−1、1−2を示しているが、運用する航空機数および業務に応じて同一活動エリア内に1つまたは3つ以上の航空機間ネットワークを有することができる。
【0027】
航空機間ネットワーク1は、時分割多元接続方式により各航空機3にタイムスロットを割り当て、双方向通信を行なう。航空機間ネットワーク1により送信するデータは、自機が保有するレーダ航跡情報、ステータス情報、自機位置情報、群内のリーダからの指令情報などにより構成される。
【0028】
各航空機3が送信するレーダ航跡情報、ステータス情報、位置情報は、すべての航空機3および地上局4で受信可能なように一斉放送とする。群内の指令情報は、送信先アドレスを付与し送信する。なお、図2において、地上局4が受信する各航空機3からのレーダ航跡情報、ステータス情報、位置情報を示す矢印は、図示していない。
【0029】
航空機3−5〜3−8は、地対空ネットワーク2と航空機間ネットワーク1−1の双方のネットワークに加入し、地上局4は、地対空ネットワーク2に加入し、戦術移動体通信ネットワークを実現する。また、地上局4は、航空機間ネットワーク1−1のチャネルに同調した受信装置を備える。これにより、管制所5は、航空機3相互の通信を地上局がモニタ(受信)することができる。これによって、航空機3から管制所5へのダウンリンクを行なうことなく、各航空機3のステータス情報、航空機位置情報、レーダ航跡情報を管制所5が把握することができる。ダウンリンクが不要であるため、ダウンリンク期間を航跡情報等の伝送に割り振ることができる。この結果、効率のよいネットワーク100が構築できる。
【0030】
地対空ネットワーク2と航空機間ネットワーク1−1、1−2は、相互の干渉を防ぐためタイムスロットについて、GPS時刻を基に双方のネットワークは同期させている。また、各ネットワークで使用する送受信周波数は、干渉が生じないよう制御された周波数を使用した周波数ホッピングパターンを使用する。また、航空機間ネットワーク1間では、各々異なる周波数ホッピングパターンを使用する。これにより、相互干渉を回避する。
【0031】
航空機3において、2つのネットワークを通じ受信した航跡情報、僚機ステータス情報等を基に、パイロットは、周辺状況の把握が可能である。また管制所5において、管制官も航空機の状況が把握できる。この結果、効果的な運用が行なえる。
【0032】
図3を参照して、航空機3における2系統のネットワーク通信を同時に実現する構成を説明する。図3において、航空機3に搭載される通信装置300は、上位システムであるミッションコンピュータ16と、リンク処理部17と、2系統の受信部18と、送信部19と、空中線共有部20と、上方空中線22と、下方空中線23と、GPS(Global Positioning System)受信機21とから、構成される。
【0033】
受信部18−1は、航空機間ネットワーク1からの無線信号を受信する。受信部18−2は、地対空ネットワーク2からの無線信号を受信する。送信部19は、航空機間ネットワーク1に送信する。上方空中線22は、機体上方から/への無線信号を送受信する。下方空中線23は、機体下方から/への無線信号を送受信する。空中線共用部20は、受信部18−1と送信部19おのおのに対し、タイムスロットに応じて上方空中線22または下方空中線23を切り替え接続する。空中線共用部20は、受信部18−2を下方空中線23に固定接続する。
【0034】
GPS受信機21が受信したGPS時刻は、タイムスロット制御および周波数ホッピングの同期確立の基準とする。リンク処理部17は、送受信データの伝送制御を行なう。上位システム16は、送信データを生成する。上位システム16は、また受信データをパイロットへ伝達する。
【0035】
地対空ネットワーク受信のために使用される受信部18−1は、常時受信状態に設定する。また、他方の受信部18−2と送信部19とは、半二重通信で使用される。送信部19は、自機に割り当てられたタイムスロットで送信を行なう。受信部18−2は、自機に割り当てられたタイムスロット以外で受信を行なう。
【0036】
空中線共用部20は、2系統の空中線の切り替え制御を行なう。空中線共用部20は、同時に、自機の送信部19が出力する送信波が受信部18−1に回り込み、干渉を与えないようフィルタとしての機能を有している。
【0037】
図4を参照して、地上局の構成を説明する。図4において、地上局4は、管制所間インタフェース24と、n+1系統のリンク処理部25と、n系統の受信部26と、送信部27と、分配器28と、受信空中線29と、送信空中線30と、GPS受信機31とから構成される。ここで、nは自然数である。
【0038】
送信部27は、送信空中線30から、地対空ネットワークへの送信を行なう。リンク処理部25−(n+1)は、通信制御を行なう。管制所間インタフェース24は、管制所との間の情報の授受を行なう。リンク処理部25−(n+1)、送信部27、管制所間インタフェース24は、送信機能を実現する。これらの構成は、送信所に設置される。
【0039】
一方、受信所は、受信空中線29、分配器28、n台の受信部26、n台のリンク処理部25で構成される。空中線29は、航空機間ネットワーク1から航空機3の交信電波を受信する。受信部26およびリンク処理部25は、航空機間ネットワーク1毎に周波数ホッピングパターンが異なるため、存在する航空機間ネットワークの数(n)の系統を備える。また、分配器28は、単一の空中線29からの受信信号を各受信部25へ振り分ける。リンク処理部25は、通信制御を行なう。
【0040】
GPS受信機31が受信したGPS時刻は、タイムスロット制御および周波数ホッピングの同期確立の基準とする。空中線29、30は、複数の航空機が地上局位置に対し色々な方角を同時に飛行するため、水平無指向性方式の空中線を使用する。
【0041】
図5を参照して、伝送フレーム構成および伝送方法を説明する。図5において、図5(a)は航跡情報である。図5(b)は地上局の送信データである。図5(c)は地対空ネットワークのフレーム構成である。図5(d)は航空機間ネットワークのフレーム構成である。図5(e)は僚機の送信データである。図5(f)は僚機のレーダ航跡情報である。図5(g)はリーダ機の送信データである。図5(h)はリーダ機のレーダ航跡情報である。
【0042】
図5A(c)において、地対空ネットワーク2は、前述したように時分割多元接続方式であり、2t秒を1周期とする。タイムフレームは、複数のタイムスロット7により構成され、基準局、地上局1から地上局Xの送信局にタイムスロットを割り当てる。基準局は、地上局のうちの代表局である。基準局は、ネットワーク管理のために必要な情報の伝送を行なう。地対空ネットワーク2のタイムスロットは、後述する図5(d)の航空機間ネットワークのタイムスロットとタイミング同期している。
【0043】
図5A(b)において、地上局1からの送信データ8は、航跡情報と指令情報が含まれ、それぞれ一斉放送、およびアドレス付けした1対1伝送である。さらに、図5A(a)において、航跡情報9は、航跡番号1から航跡番号nまでの複数の航跡情報から構成され、ひとつのタイムスロットで1航跡情報の伝送を行なう。なお、各地上局に割り当てるタイムスロット数は、伝送する航跡情報数、または指令情報の数により変更が可能である。
【0044】
図5B(d)において、航空機間ネットワ−ク1は、前述のように時分割多元接続方式であり、t秒を1周期とする。タイムフレームは、複数のタイムスロット7により構成される。タームフレームは、基準局、航空機1から航空機nの送信局にタイムスロットを割り当てる。基準局は航空機のうちの代表機であり、ネットワーク管理のために必要な情報の伝送を行うものである。また、ネットワークに新規加入を必要とする航空機が、加入要求を送信するスロットを備える。
【0045】
航空機3は、リーダ機と僚機(従属機)では伝送する内容が異なる。図5B(g)において、リーダ機の送信データ11は、レーダ航跡情報、僚機宛指令情報、自機ステータス情報および受領確認により構成される。
【0046】
レーダ航跡情報は、自機のレーダで取得した航跡情報を僚機に対して伝送し、情報の共有を図るものである。リーダ機のレーダ航跡情報12は、レーダ航跡番号1からyまでの情報を一斉放送形式で送信する。yは自然数であり、レーダ航跡情報数である。
【0047】
レーダ航跡情報の伝送においては、リーダ機のレーダ航跡情報に12示すように1航跡あたり2タイムスロットを使用し、同じ情報を2回送信している。これは、接続する空中線を上方、下方で切り替えを実施し、送信を行うためである。
【0048】
また、自機ステータス情報は、自己の位置、残燃料、残燃料等の状態を各航空機へ伝送するものであり一斉放送形式にて送信される。また、僚機宛指令情報は、リーダ機のみが送信するものであり、僚機に対して指示を与えるために1対1伝送をするものである。さらに、受領確認は、地上局からの指令情報に対する受領可否、リーダ機からの僚機宛指令情報に対する受領可否について一斉放送形式で送信する。
【0049】
一方、僚機の送信データ14は、図5B(e)において、レーダ航跡情報、自機ステータス情報および受領確認により構成される。僚機の送信データ14は、僚機宛指令情報がないことを除いて、リーダ機の送信データ11と同じなので、説明を省く。これは、図5B(f)の僚機のレーダ航跡情報についても同様である。
【0050】
図6を参照して、以下の説明で前提となる航空機群の位置関係を説明する。図6において、航空機群は、3機の航空機3−A〜3−Cにて構成される。航空機3−Aの上方に航空機3−Bが飛行している。また、航空機3−Aの下方に航空機3−Cが飛行している。
【0051】
航空機3−Aを基準とすると、航空機3−Bは、航空機3−Aの上方空中線覆域を飛行している。また、航空機3−Cは、航空機3−Aの下方空中線覆域を飛行している。したがって、航空機3−Aは、航空機3−Bとの通信に、上方空中線22を用いる。また、航空機3−Aは、航空機3−Cとの通信に、下方空中線23を用いる。
【0052】
図7を参照して、時分割多元接続通信技術を用いた4局の地上局と3機の航空機との間のタイムチャートを説明する。図7において、図7(a)は地上局Aの送信と受信のタイムチャートである。図7(b)は地上局Bの送信と受信のタイムチャートである。図7(c)は地上局Cの送信と受信のタイムチャートである。図7(d)は地上局Dの送信と受信のタイムチャートである。図7(e)は航空機Aの送信と受信のタイムチャートである。図7(f)は航空機Bの送信と受信のタイムチャートである。図7(g)は航空機Cの送信と受信のタイムチャートである。
【0053】
図7において、各地上局と、各航空機とは、地対空ネットワークと、航空機間のネットワークで接続されている。また、各航空機は、機体の下方に下方空中線、機体の上方に上方空中線を設置している。航空機は、図6で説明したように、航空機Aが中高度に位置し、航空機Bが高高度に位置し、航空機Cが低高度に位置する。
【0054】
図7において、地上局Aは、タイムスロット1〜4で地対空ネットワーク2に送信する。地上局Bは、タイムスロット5〜8で地対空ネットワーク2に送信する。地上局Cは、タイムスロット9〜12で地対空ネットワーク2に送信する。地上局Dは、タイムスロット13〜16で地対空ネットワーク2に送信する。
【0055】
航空機Bは、タイムスロット1、9で上方空中線22から航空機間ネットワーク1に送信する。航空機Bは、タイムスロット2、10で下方空中線23から航空機間ネットワーク1に送信する。航空機Aは、タイムスロット3、11で上方空中線22から航空機間ネットワーク1に送信する。航空機Aは、タイムスロット4、12で下方空中線23から航空機間ネットワーク1に送信する。航空機Cは、タイムスロット5、13で上方空中線22から航空機間ネットワーク1に送信する。航空機Cは、タイムスロット6、14で下方空中線23から航空機間ネットワーク1に送信する。
航空機A〜Bは、連続する2タイムスロットにおいて、同一データを空中線を切り替えて送信する。
【0056】
地上局A〜Dは、航空機A〜Cの下方空中線23から送信された電波を受信する。
航空機Bは、航空機Aおよび航空機Cの上方空中線22から送信された電波を受信する。航空機Aは、航空機Cの上方空中線22から送信された電波を受信する。また、航空機Aは、航空機Bの下方空中線23から送信された電波を受信する。航空機Cは、航空機Aおよび航空機Bの下方空中線22から送信された電波を受信する。航空機A〜Cは、各タイムスロットで、地上局A〜Dから送信された電波を受信する。
なお、図7は理想的な受信状態を記載しており、航空機からの電波を特定の地上局のみ受信する場合もある。逆に、航空機は、特定の地上局の電波のみしか受信できない場合もある。
【0057】
図7を図1と対比することにより、本実施例において、航空機間の通信不良を解消し、地上局との通信量を確保することができることは、明確である。
航空機の活動エリア内の全ての地上局を、ひとつの地対空ネットワークに所属させることにより、航空機がひとつの地上局の電波覆域から隣接する地上局の電波覆域へ移動するような場合においても、ネットワークからの離脱、加入の手続きが不要である。このため通信が途切れることなく安定した運用が可能となる。
【0058】
地上局Aから航空機Cまでの全参加局の総送信機会は、図1に比べ2倍とすることができる。また、飛行位置関係に基づく通信不良の発生が回避できるため、情報の損失のない伝送が実現でき、より多くの情報伝送が可能となる。
以上のように、本実施例によれば、効率的で通信途絶を回避した安定な移動体通信を実現することが可能である。
【実施例2】
【0059】
図8を参照して、航空機の一部が地上局の電波覆域を逸脱し運用する中継運用を説明する。図8において、航空機3−1〜3−3が、地上局の通信覆域外へ逸脱または山陰などの電波の到達しない空域を飛行するような場合、指定された航空機3−4は、中継局となる。航空機3−4は、地上局4から送信される地対空ネットワーク2のデータについて、通信覆域外へ逸脱した航空機群(被中継機と言う)3−1〜3−3へ中継する。航空機3−4は、また被中継機群の航空機間ネットワーク1−2のデータを地上局4へ中継する。 中継運用を行なう場合、受信部18−1は、地対空ネットワークからのデータを受信する。受信部18−2は、被中継航空機群からの航空機間ネットワークデータを受信する。送信部は、地対空ネットワークから受信したデータのうち被中継群へ中継するデータと、被中継群の航空機間ネットワークデータを時分割多重で送信する。
【0060】
本実施例に拠れば、航空機の一部が地上局の電波覆域を逸脱する場合も、効率的で通信途絶を回避した安定な移動体通信を実現することが可能である。
【符号の説明】
【0061】
1…航空機間ネットワーク、2…地対空ネットワーク、3…航空機、4…地上局、5…管制所、6…地対空ネットワークのタイムフレーム、7…タイムスロット、8…地上局送信データ、9…地上局送信航跡情報、10…航空機間ネットワークのタイムフレーム、11…リーダ機の送信データ、12…リーダ機の送信航跡情報、13…僚機の送信データ、14…僚機の送信航跡情報、16…上位システム、17…リンク処理部、18…受信部、19…送信部、20…空中線共用部、21…GPS、22…上方空中線、23…下方空中線、24…管制所間インタフェース、25…リンク処理部、26…受信部、27…送信部、28…分配器、29…受信空中線、30…送信空中線、100…移動体通信システム、300…通信装置。
【特許請求の範囲】
【請求項1】
複数の航空移動局と、複数の地上局とから構成される移動体通信システムにおいて、
前記地上局から前記航空機局への第1のデータ送信に用いる第1のネットワークと、複数の前記航空移動局間の第2のデータ交換および前記航空移動局から前記地上局への前記第2のデータ送信に用いる第2のネットワークとから構成されることを特徴とする移動体通信システム。
【請求項2】
請求項1に記載の移動体通信システムであって、
前記第1のネットワークにおいて、前記地上局は、複数の前記航空移動局に第1の航跡情報を一斉送信し、特定の航空移動局に指令情報を1対1送信することを特徴とする移動体通信システム。
【請求項3】
請求項1に記載の移動体通信システムであって、
前記第2のネットワークにおいて、第1の航空移動局は、前記航空移動局に第2の航跡情報を一斉送信し、特定の航空移動局に指令情報を1対1送信することを特徴とする移動体通信システム。
【請求項4】
請求項1に記載の移動体通信システムであって、
前記第1のネットワークに第1の周波数ホッピングパターンを割当て、前記第2のネットワークに前記第1の周波数ホッピングパターンと相互干渉を生じない第2の周波数ホッピングパターンを割当て、前記第1のネットワークと前記第2のネットワークとが時間同期した時分割多重方式による通信を行なうことを特徴とする移動体通信システム。
【請求項5】
請求項1に記載の移動体通信システムであって、
第2の航空移動局が複数の前記地上局の通信覆域外へ出るとき、指定された航空移動局は、前記通信覆域に留まって、前記第2の航空移動局と前記地上局との通信を中継することを特徴とする移動体通信システム。
【請求項6】
第1の受信部と、第2の受信部と、送信部とを備えた航空移動局において、
前記第1の受信部は、地上局からの無線信号を常時受信し、
前記送信部は、予め定めたタイミングで送信し、
前記第2の受信部は、前記タイミング以外の期間受信することを特徴とする航空移動局。
【請求項7】
請求項6に記載の航空移動局であって、
さらに、前記送信部による送信と前記第1の受信部の受信との間の干渉を防止するフィルタ機能を具備した空中線共用部を備えることを特徴とする航空移動局。
【請求項8】
請求項6に記載の航空移動局であって、
さらに、上方に第1の空中線と、下方に第2の空中線とを備え、
異なるタイミングで、前記第1の空中線と前記第2の空中線とから、同一データを送信することを特徴とする航空移動局。
【請求項1】
複数の航空移動局と、複数の地上局とから構成される移動体通信システムにおいて、
前記地上局から前記航空機局への第1のデータ送信に用いる第1のネットワークと、複数の前記航空移動局間の第2のデータ交換および前記航空移動局から前記地上局への前記第2のデータ送信に用いる第2のネットワークとから構成されることを特徴とする移動体通信システム。
【請求項2】
請求項1に記載の移動体通信システムであって、
前記第1のネットワークにおいて、前記地上局は、複数の前記航空移動局に第1の航跡情報を一斉送信し、特定の航空移動局に指令情報を1対1送信することを特徴とする移動体通信システム。
【請求項3】
請求項1に記載の移動体通信システムであって、
前記第2のネットワークにおいて、第1の航空移動局は、前記航空移動局に第2の航跡情報を一斉送信し、特定の航空移動局に指令情報を1対1送信することを特徴とする移動体通信システム。
【請求項4】
請求項1に記載の移動体通信システムであって、
前記第1のネットワークに第1の周波数ホッピングパターンを割当て、前記第2のネットワークに前記第1の周波数ホッピングパターンと相互干渉を生じない第2の周波数ホッピングパターンを割当て、前記第1のネットワークと前記第2のネットワークとが時間同期した時分割多重方式による通信を行なうことを特徴とする移動体通信システム。
【請求項5】
請求項1に記載の移動体通信システムであって、
第2の航空移動局が複数の前記地上局の通信覆域外へ出るとき、指定された航空移動局は、前記通信覆域に留まって、前記第2の航空移動局と前記地上局との通信を中継することを特徴とする移動体通信システム。
【請求項6】
第1の受信部と、第2の受信部と、送信部とを備えた航空移動局において、
前記第1の受信部は、地上局からの無線信号を常時受信し、
前記送信部は、予め定めたタイミングで送信し、
前記第2の受信部は、前記タイミング以外の期間受信することを特徴とする航空移動局。
【請求項7】
請求項6に記載の航空移動局であって、
さらに、前記送信部による送信と前記第1の受信部の受信との間の干渉を防止するフィルタ機能を具備した空中線共用部を備えることを特徴とする航空移動局。
【請求項8】
請求項6に記載の航空移動局であって、
さらに、上方に第1の空中線と、下方に第2の空中線とを備え、
異なるタイミングで、前記第1の空中線と前記第2の空中線とから、同一データを送信することを特徴とする航空移動局。
【図1】


【図2】
【図3】
【図4】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【公開番号】特開2011−44917(P2011−44917A)
【公開日】平成23年3月3日(2011.3.3)
【国際特許分類】
【出願番号】特願2009−191967(P2009−191967)
【出願日】平成21年8月21日(2009.8.21)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成23年3月3日(2011.3.3)
【国際特許分類】
【出願日】平成21年8月21日(2009.8.21)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]