
移動体通信装置
【目的】 本発明は、移動中に通信を行なう移動体通信装置に関し、移動体の無線通信システムの通信不能状態を減少させたり、移動体の経路誘導を的確に行ったり、地図情報の誤りを速やかに伝えたりすることを目的とする。
【構成】 地図情報を格納した地図記憶手段と、地図情報に対応づけて通信不可能あるいは通信可能な領域情報を記憶する領域記憶手段と、移動体の現在位置を検出する位置検出手段と、移動体の検出した現在位置をもとに領域記憶手段を探索して移動体の移動方向に通信不可能領域があると判明したときに、通信不可能領域を回避した複数の経路を見つけて通信不可能領域を通過する距離あるいは時間が最も短い経路に移動体を誘導する手段と
を備える。
【構成】 地図情報を格納した地図記憶手段と、地図情報に対応づけて通信不可能あるいは通信可能な領域情報を記憶する領域記憶手段と、移動体の現在位置を検出する位置検出手段と、移動体の検出した現在位置をもとに領域記憶手段を探索して移動体の移動方向に通信不可能領域があると判明したときに、通信不可能領域を回避した複数の経路を見つけて通信不可能領域を通過する距離あるいは時間が最も短い経路に移動体を誘導する手段と
を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動中に通信を行なう移動体通信装置に関するものである。
近年、移動体における位置検出システムの一般化(例えばGPSなど)により、自動車等の位置が緯度、経度の数値として判るようになり、地図情報と組み合わせて、経路誘導システム(ナビゲーションシステム)として、一般化してきた。
【0002】
また、移動体においても通信可能な自動車電話、携帯電話などの無線通信システムも一般化してきた。
【0003】
このように移動体の位置検出システムと、通信システムと、これを制御する制御部とを組み合わせて、移動中の通信断を防ぎ、通信を回復し、通信を可能にし、最新の地図情報
によって移動体の経路誘導およびオペレータへの表示を実現することや、地図情報の誤りを速やかに伝えることが望まれている。
【背景技術】
【0004】
従来の移動体の無線通信システムは、通話出来るか否かは実際に通話を試みるか、通話可能範囲を表した地図を通話者(オペレータ)が参照するしかなかった。
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述したように従来の移動体の無線通信システムは、実際に通話したり、通話可能範囲を表した地図を見て判断したりしていたため、移動中の通信断を防いだり、移動体の経路誘導を的確に行えなかったり、地図情報を正確に伝えることができないなどの問題があった。
【0006】
本発明はこれらの問題を解決するため、
第1の目的は、移動体の無線通信システムの通信不能状態を減少させたることにある。
【0007】
第2の目的は、移動体の経路誘導を的確に行うことにある。
第3の目的は、地図情報の誤りを速やかに伝えたりすることにある。
【課題を解決するための手段】
【0008】
図1を参照して課題を解決するための手段を説明する。
図1において、位置検出手段1は、移動体の現在位置を検出するものである。
【0009】
領域記憶手段4は、通信不可能あるいは通信可能な領域情報を記憶するものである。
次に、動作を説明する。
【0010】
通信不可能領域を移動している移動体が位置検出手段1によって検出した現在位置をもとに領域記憶手段4を参照して通信可能領域に入ったとき、通信を行わせるようにしている。
【0011】
また、位置検出手段1によって検出した現在位置をもとに地図領域記憶手段3を探索して地図情報がなかったときに、センタに現在位置を通知して最新の地図情報を要求し、送信されてきた最新の地図情報で地図領域記憶手段3を更新するようにしている。
【0012】
この際、送信されてきた地図情報で地図領域記憶手段3を更新した場合に、この更新した地図情報上で現在位置の道路情報がなかったときにセンタに現在位置を通知して道路情報の間違いを送信するようにしている。
【0013】
また、移動体の検出した現在位置をもとに領域記憶手段4を探索して移動体の移動方向に通信不可能領域があると判明したときに、通信不可能領域を回避した複数の経路を見つけて通信不可能領域を通過する距離あるいは時間が最も短い経路に移動体を誘導するようにしている。
【0014】
従って、移動体の無線通信システムの通信不能状態を減少させたり、通信途絶したときに通信可能領域に入ったときに通信再開して回復させたり、移動体の経路誘導を的確に行ったり、地図情報の誤りを速やかに伝えたりなどすることが可能となる。
【発明の効果】
【0015】
以上説明したように、本発明によれば、通信時に通信不可能領域であったときに通信可能領域に入ったときに通信開始したり、移動体の経路誘導を行ったり、地図情報の誤りを伝えたりする構成を採用しているため、移動体7の移動体通信装置の通信不能状態を減少させたり、通信開始時に通信不可能領域であったときに通信可能領域となったときに自動的に通信を開始したり、移動体の経路誘導を的確に行ったり、地図情報の誤りを速やかに伝えたりすることができる。
【発明を実施するための最良の形態】
【0016】
本発明は、移動体の無線通信システムの通信不能状態を減少させたり、通信途絶したときに通信可能領域に入ったときに通信再開して回復させたり、移動体の経路誘導を的確に行ったり、地図情報の誤りを速やかに伝えたりなどすることを実現した。
【実施例1】
【0017】
次に、図1から図11を用いて本発明の実施の形態および動作を順次詳細に説明する。
図1は、本発明のシステム構成図を示す。
【0018】
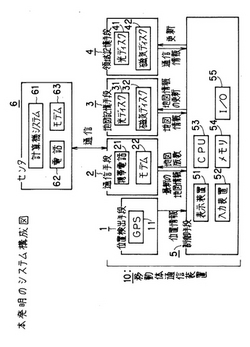
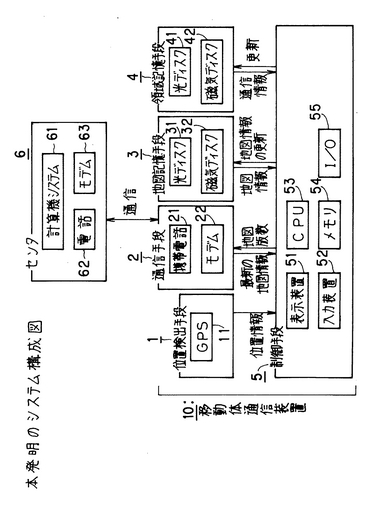
図1において、移動体通信装置10は、センタ6と通信して移動体の現在位置を検出したり、移動体の通信不能状態を減少させたり、移動体の経路誘導を的確に行ったり、地図情報の誤りを速やかに伝えたりなどするものであって、位置検出手段1、通信手段2、地図領域記憶手段3、領域記憶手段4、および制御手段5などから構成されるものである。
【0019】
位置検出手段1は、移動体の現在位置を検出するものであって、例えばGPS(複数の人工衛星からの電波を受信して地球上の現在位置を検出するシステム)などである。
【0020】
通信手段2は、センタ6と通信するものであって、例えば携帯電話21を使って通信したり、モデム22を使って信号を変調し通信したりなどするものである。
【0021】
地図領域記憶手段3は、地図情報を記憶するものであって、例えば光ディスク41や磁気ディスク32などである。
【0022】
領域記憶手段4は、地図情報こ対応づけて通信不可能な領域あるいは通信可能な領域を記憶するものであって、例えば光ディスク41や磁気ディスク42などである。
【0023】
制御手段5は、各種制御を行うものであって、迂回経路に変更したりなどするものである。制御手段5は、表示装置51、入力装置52、CPU53、メモリ54、およびI/O55などから構成されるものである。
【0024】
センタ6は、移動体通信装置10と通信して移動体に地図情報を提供したりなどするものであって、計算機システム61、電話62、およびモデム63などから構成されるものである。
【0025】
次に、図2ないし図11を用いて図1の構成の動作を順次詳細に説明する。
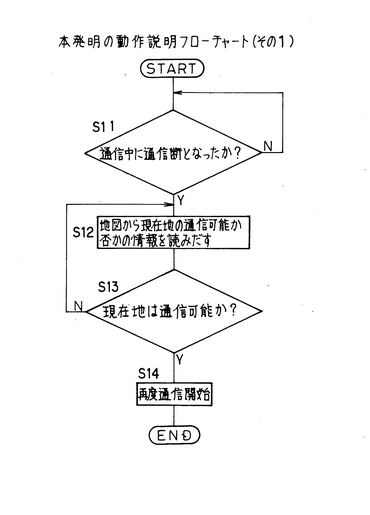
図2は、本発明の動作説明フローチャート(その1)を示す。
【0026】
図2において、S11は、通信中に通信断となったか判別する。これは、後述する図3に示すように、移動体7が地点Aで通信を開始し地点Bで通信断となったか判別する。YESの場合には、S12に進む。NOの場合には、通信中に通信断となるのを待つ。
【0027】
S12は、地図から現在地の通信可能か否かの情報を読み出す。これは、地図記憶部3および記憶部4を探索して地図情報上で現在位置が通信可能か否かの情報を読み出す。
【0028】
S13は、現在地が通信可能か判別する。これは、例えば後述する図3の地点Cに移動体7が移動して通信可能領域に入ったか判別する。YESの場合には、S14に進む。NOの場合には、S12を繰り返す。
【0029】
S14は、再度通信開始する。これは、S13のYESで移動体7が通信可能領域に再度入ったと判明したので、通信手段2に先の通信先と再度通信をさせ、通信を回復させる。
【0030】
以上によって、移動体7が走行中に通信断となったときに地図情報上で通信可能領域に入ったと判明したときに、通信手段2が先の通信先と再度通信を行って通信を回復することが可能となる。
【0031】
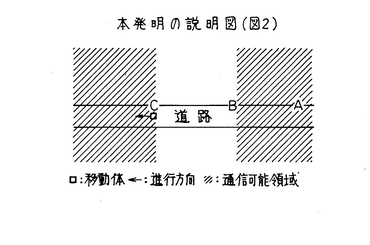
図3は、本発明の説明図(図2)を示す。
図3において、移動体7は、図1の移動体通信装置10を持ち、地図情報上で所定の経路に従って走行するものである。ここでは、移動体7が地点Aで通信を開始し地点Bで通信断となった場合、地点Cの通信可能領域に入ったことが地図情報記憶部3および領域記憶手段4を探索して判明した場合に、通信手段2に先の通信先と再度通信をさせ、通信を回復する様子を示す。
【0032】
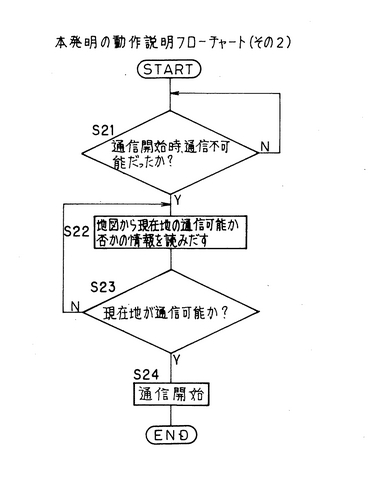
図4は、本発明の動作鋭明フローチャート(その2)を示す。
図4において、S21は、通信開始時、通信不可能だったか判別する。YESの場合には、S22に進む。NOの場合には、終了する(END)。
【0033】
S22は、S21のYESで移動体7が移動中に通信開始したときに通信不可能領域であると判明したので、地図から現在地の通信可能か否かの情報を読み出す。これは、位置検出手段1によって検出した現在地について、地図領域記憶手段3および領域記憶手段4を探索して通信可能領域に入ったかの情報を読み出す。
【0034】
S23は、現在地が通信可能か判別する。YESの場合には、S24で通信可能領域に移動体7が入ったと判明したので、通信を開始する。一方、NOの場合には、S22を繰り返す。
【0035】
以上によって、移動体7が走行中に通信開始時に通信不可能領域であった場合、現在地をもとに地図情報上で通信可能領域に入ったと判明したときに通信を開始することが可能となる。
【0036】
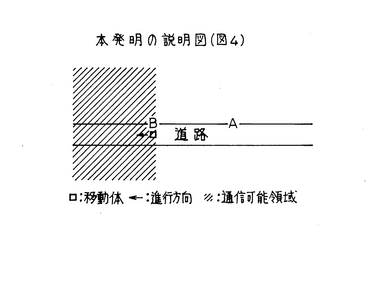
図5は、本発明の説明国(図4)を示す。
図5において、移動体7は、図1の移動体通信装置10を持ち、地図情報上で所定の経路に従って走行するものである。ここでは、移動体7が地点Aで通信を開始したが通信不可能領域で通信できなく、地点Bの通信可能領域に入ったことが地図情報記憶部3および領域記憶手段4を探索して判明した場合に、通信手段2に通信先と通信を開始させる様子を示す。
【0037】
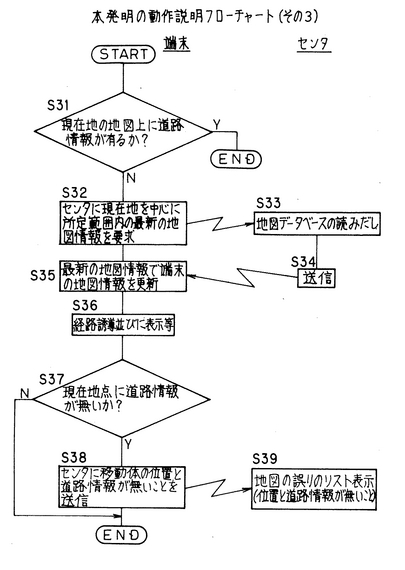
図6は、本発明の動作説明フローチャート(その3)を示す。
図6において、S31は、現在地の地図上に道路情報が有るか判別する。YESの場合には、終了する。NOの場合には、S32に進む。
【0038】
S32は、センタに現在地を中心に所定範囲内の最新の地図情報を要求する。これは、S31のNOで現在地の地図上の道路情報がないと判明したので、センタ6に現在地を中心に所定範囲の最新の地図情報を要求する。
【0039】
S33は、センタ6が最新の地図データベースの読み出しを行なう。
S34は、送信する。
【0040】
S35は、最新の地図情報で端末の地図情報を更新する。これは、センタ6に要求した地図情報で、端末(移動体通信制御装置が動作する端末)の地図情報(地図および道路情報を持つ地図情報)を更新して最新のものとする(例えば図7に示すように、最新の地図に更新する)。
【0041】
S36は、経路誘導並びに表示等を行なう。これは、S35で更新した最新の地図情報をもとに、移動体7の現在地をもとに経路誘導したり、表示したりする。
【0042】
S37は、現在地点に道路情報が無いか判別する。これは、最新の地図情報に更新した後、移動体7の現在地点をもとに当該最新の地図情報上に道路情報がないか判別する。YESの場合には、現在地点の道路情報がないと判明したので、S38でセンタに移動体の位置を道路情報が無いことを送信する。一方、NOの場合には、終了する。
【0043】
S39は、地図の誤りリスト表示(位置と道路情報が無いこと)を行なう。
以上によって、移動体7の現在位置の道路情報が地図上になかった場合、センタに現在位置の最新の道路情報を持つ地図情報を要求し、送信されてきた最新の地図情報で更新することが可能となる。そして、更新後の最新の地図情報上で現在位置の道路情報がなかった場合、センタに移動体7の位置と道路情報がない旨を通知し、センタ6で地図(道路情報)の誤りのリスト表示を行なう(位置と道路情報が無いことを表示する)。
【0044】
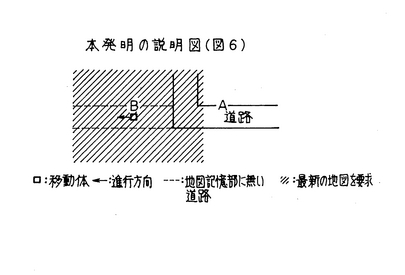
図7は、本発明の説明図(図6)を示す。
図7において、移動体7は、図1の移動体通信装置10を持ち、地図情報上で所定の経路に従って走行するものである。ここでは、移動体7が地点Aから地点Bに移動したときに当該地点Bで道路情報がない場合、センタ6に現在地と道路情報がない旨を通知し、最新の道路情報を含む地図情報の送信を受け、地図情報を最新のものに更新することが可能となる。
【0045】
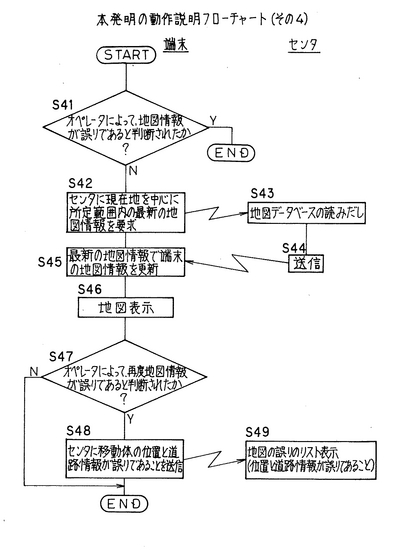
図8は、本発明の動作説明フローチャート(その4)を示す。
図8において、S41は、オペレークによって、地図情報が誤りであると判断されたか判別する。YESの場合には、S42に進む。NOの場合には、終了する。
【0046】
S42は、センタに現在地を中心に所定範囲内の最新の地図情報を要求する。
S43は、センタ6が地図データベースの読み出しを行なう。
【0047】
S44は、送信する。
S45は、最新の地図情報で端末の地図情報を更新する。これは、センタ6から送信されてきた最新の地図情報で地図領域記憶手段3を更新して最新のものとする。
【0048】
S46は、地図を表示する。これは、更新した後の最新の地図を表示する。
S47は、オペレータによって、再度地図情報が誤りであると判断されたか判別する。YESの場合には、S48でセンタに移動体の位置と道路情報が誤りであることを送信する。一方、S47のNOの場合には、終了する。
【0049】
S49は、センタ6で地図の誤りのリスト表示する。これは、S48で端末(移動体通信装置10を動作させる端末)から送信されてきた移動体の現在位置と間違いの道路情報のリスト表示を行なう。
【0050】
以上によって、移動体7の現在位置の地図情報に誤りがありセンタ6に最新の地図情報の送信を受けて地図領域記憶手段3を最新の地図情報で更新すると共に表示し、再度道路情報に間違いあると指摘された場合に、移動体7の現在位置および道路情報が間違いの旨をセンタ6に送信し、地図の誤りリスト表示を行なうことが可能となる。
【0051】
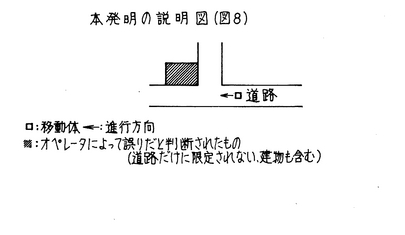
図9は、本発明の説明図(図8)を示す。
図9において、移動体7は、図1の移動体通信装置10を持ち、地図情報上で所定の経路に従って走行するものである。ここでは、移動体7の現在位置の地図情報の誤りの指摘に対応して、センタ6に現在位置と所定範囲の最新の地図情報を要求し、送信を受けた最新の地図情報で地図領域記憶手段3を更新すると共に地図を表示し、再度間違いの旨の指摘を受けたときに、移動体7の現在位置および間違いの道路情報を通知し、地図の間違いのリスト表示を行なうことが可能となる。
【0052】
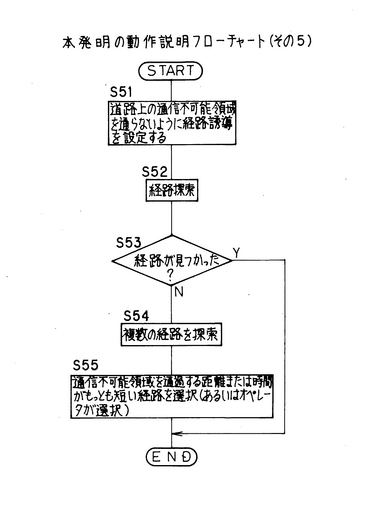
図10は、本発明の動作説明フローチャート(その5)を示す。
図10において、S51は、道路上の通信不可能領域を通らないように経路誘導を設定する。
【0053】
S52は、経路探索する。これは、S51で設定された経路誘導を行なうように地図領域記憶手段3および領域記憶手段4を探索して経路を見つける。
【0054】
S53は、経路が見つかったか判別する。YESの場合には、終了する。NOの場合には、S54に進む。
【0055】
S54は、複数の経路を探索する。これは、S51で設定した道路上で通信不可能領域を通らない経路を見つけることができなかったので、通信不可能領域を通る経路を複数見つける。
【0056】
S55は、通信不可能領域を通過する距離または時間がもっとも短い経路を選択(あるいはオペレータが選択)する。これは、S54で見つけた複数の経路のうち、通信不可能領域を通過する距離または時間が最も短い経路を誘導経路として選択する。
【0057】
以上によって、移動体7の現在位置からの移動方向に通信不可能領域があると判明したときに、当該通信不可能領域を通らない経路を探索し、見つからないときに通信不可能領域を通る複数の経路を見つけ、このうちから通信不可能領域を通る距離または時間が最も短い経路を誘導経路と選択し、移動体7を誘導することが可能となる。
【0058】
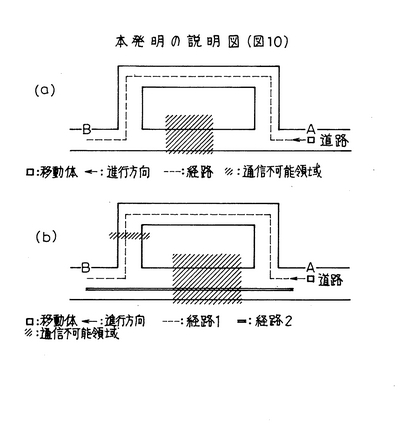
図11は、本発明の説明図(図10)を示す。
図11において、移動体7は、図1の移動体通信装置10を持ち、地図情報上で所定の経路に従って走行するものである。ここでは、移動体7の現在位置から移動方向に通信不可能領域があるときに、通信不可能領域を通らない経路が見つかればその経路に移動体7を誘導し、一方、見つからないときに通信不可能領域を通る複数の経路を探索し、そのうちから通信不可能領域を通る時間あるいは距離が最も短い経路を選択し、移動体7を誘導することが可能となる。
【産業上の利用可能性】
【0059】
本発明は、移動中に通信を行う移動体通信装置に関するものである。
【図面の簡単な説明】
【0060】
【図1】本発明のシステム構成図である。
【図2】本発明の動作説明フローチャート(その1)である。
【図3】本発明の説明図(図2)である。
【図4】本発明の動作説明フロ十チャート(その2)である。
【図5】本発明の説明図(図4)である。
【図6】本発明の動作説明フローチャート(その3)である。
【図7】本発明の説明図(図6)である。
【図8】本発明の動作説明フローチャート(その4)である。
【図9】本発明の説明図(図8)である。
【図10】本発明の動作説明フロナチャート(その5)である。
【図11】本発明の説明図(図10)である。
【符号の説明】
【0061】
1:位置検出手段
2:通信手段
3:地図領域記憶手段
4:領域記憶手段
5:制御手段
6:センタ
7:移動体
【技術分野】
【0001】
本発明は、移動中に通信を行なう移動体通信装置に関するものである。
近年、移動体における位置検出システムの一般化(例えばGPSなど)により、自動車等の位置が緯度、経度の数値として判るようになり、地図情報と組み合わせて、経路誘導システム(ナビゲーションシステム)として、一般化してきた。
【0002】
また、移動体においても通信可能な自動車電話、携帯電話などの無線通信システムも一般化してきた。
【0003】
このように移動体の位置検出システムと、通信システムと、これを制御する制御部とを組み合わせて、移動中の通信断を防ぎ、通信を回復し、通信を可能にし、最新の地図情報
によって移動体の経路誘導およびオペレータへの表示を実現することや、地図情報の誤りを速やかに伝えることが望まれている。
【背景技術】
【0004】
従来の移動体の無線通信システムは、通話出来るか否かは実際に通話を試みるか、通話可能範囲を表した地図を通話者(オペレータ)が参照するしかなかった。
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述したように従来の移動体の無線通信システムは、実際に通話したり、通話可能範囲を表した地図を見て判断したりしていたため、移動中の通信断を防いだり、移動体の経路誘導を的確に行えなかったり、地図情報を正確に伝えることができないなどの問題があった。
【0006】
本発明はこれらの問題を解決するため、
第1の目的は、移動体の無線通信システムの通信不能状態を減少させたることにある。
【0007】
第2の目的は、移動体の経路誘導を的確に行うことにある。
第3の目的は、地図情報の誤りを速やかに伝えたりすることにある。
【課題を解決するための手段】
【0008】
図1を参照して課題を解決するための手段を説明する。
図1において、位置検出手段1は、移動体の現在位置を検出するものである。
【0009】
領域記憶手段4は、通信不可能あるいは通信可能な領域情報を記憶するものである。
次に、動作を説明する。
【0010】
通信不可能領域を移動している移動体が位置検出手段1によって検出した現在位置をもとに領域記憶手段4を参照して通信可能領域に入ったとき、通信を行わせるようにしている。
【0011】
また、位置検出手段1によって検出した現在位置をもとに地図領域記憶手段3を探索して地図情報がなかったときに、センタに現在位置を通知して最新の地図情報を要求し、送信されてきた最新の地図情報で地図領域記憶手段3を更新するようにしている。
【0012】
この際、送信されてきた地図情報で地図領域記憶手段3を更新した場合に、この更新した地図情報上で現在位置の道路情報がなかったときにセンタに現在位置を通知して道路情報の間違いを送信するようにしている。
【0013】
また、移動体の検出した現在位置をもとに領域記憶手段4を探索して移動体の移動方向に通信不可能領域があると判明したときに、通信不可能領域を回避した複数の経路を見つけて通信不可能領域を通過する距離あるいは時間が最も短い経路に移動体を誘導するようにしている。
【0014】
従って、移動体の無線通信システムの通信不能状態を減少させたり、通信途絶したときに通信可能領域に入ったときに通信再開して回復させたり、移動体の経路誘導を的確に行ったり、地図情報の誤りを速やかに伝えたりなどすることが可能となる。
【発明の効果】
【0015】
以上説明したように、本発明によれば、通信時に通信不可能領域であったときに通信可能領域に入ったときに通信開始したり、移動体の経路誘導を行ったり、地図情報の誤りを伝えたりする構成を採用しているため、移動体7の移動体通信装置の通信不能状態を減少させたり、通信開始時に通信不可能領域であったときに通信可能領域となったときに自動的に通信を開始したり、移動体の経路誘導を的確に行ったり、地図情報の誤りを速やかに伝えたりすることができる。
【発明を実施するための最良の形態】
【0016】
本発明は、移動体の無線通信システムの通信不能状態を減少させたり、通信途絶したときに通信可能領域に入ったときに通信再開して回復させたり、移動体の経路誘導を的確に行ったり、地図情報の誤りを速やかに伝えたりなどすることを実現した。
【実施例1】
【0017】
次に、図1から図11を用いて本発明の実施の形態および動作を順次詳細に説明する。
図1は、本発明のシステム構成図を示す。
【0018】
図1において、移動体通信装置10は、センタ6と通信して移動体の現在位置を検出したり、移動体の通信不能状態を減少させたり、移動体の経路誘導を的確に行ったり、地図情報の誤りを速やかに伝えたりなどするものであって、位置検出手段1、通信手段2、地図領域記憶手段3、領域記憶手段4、および制御手段5などから構成されるものである。
【0019】
位置検出手段1は、移動体の現在位置を検出するものであって、例えばGPS(複数の人工衛星からの電波を受信して地球上の現在位置を検出するシステム)などである。
【0020】
通信手段2は、センタ6と通信するものであって、例えば携帯電話21を使って通信したり、モデム22を使って信号を変調し通信したりなどするものである。
【0021】
地図領域記憶手段3は、地図情報を記憶するものであって、例えば光ディスク41や磁気ディスク32などである。
【0022】
領域記憶手段4は、地図情報こ対応づけて通信不可能な領域あるいは通信可能な領域を記憶するものであって、例えば光ディスク41や磁気ディスク42などである。
【0023】
制御手段5は、各種制御を行うものであって、迂回経路に変更したりなどするものである。制御手段5は、表示装置51、入力装置52、CPU53、メモリ54、およびI/O55などから構成されるものである。
【0024】
センタ6は、移動体通信装置10と通信して移動体に地図情報を提供したりなどするものであって、計算機システム61、電話62、およびモデム63などから構成されるものである。
【0025】
次に、図2ないし図11を用いて図1の構成の動作を順次詳細に説明する。
図2は、本発明の動作説明フローチャート(その1)を示す。
【0026】
図2において、S11は、通信中に通信断となったか判別する。これは、後述する図3に示すように、移動体7が地点Aで通信を開始し地点Bで通信断となったか判別する。YESの場合には、S12に進む。NOの場合には、通信中に通信断となるのを待つ。
【0027】
S12は、地図から現在地の通信可能か否かの情報を読み出す。これは、地図記憶部3および記憶部4を探索して地図情報上で現在位置が通信可能か否かの情報を読み出す。
【0028】
S13は、現在地が通信可能か判別する。これは、例えば後述する図3の地点Cに移動体7が移動して通信可能領域に入ったか判別する。YESの場合には、S14に進む。NOの場合には、S12を繰り返す。
【0029】
S14は、再度通信開始する。これは、S13のYESで移動体7が通信可能領域に再度入ったと判明したので、通信手段2に先の通信先と再度通信をさせ、通信を回復させる。
【0030】
以上によって、移動体7が走行中に通信断となったときに地図情報上で通信可能領域に入ったと判明したときに、通信手段2が先の通信先と再度通信を行って通信を回復することが可能となる。
【0031】
図3は、本発明の説明図(図2)を示す。
図3において、移動体7は、図1の移動体通信装置10を持ち、地図情報上で所定の経路に従って走行するものである。ここでは、移動体7が地点Aで通信を開始し地点Bで通信断となった場合、地点Cの通信可能領域に入ったことが地図情報記憶部3および領域記憶手段4を探索して判明した場合に、通信手段2に先の通信先と再度通信をさせ、通信を回復する様子を示す。
【0032】
図4は、本発明の動作鋭明フローチャート(その2)を示す。
図4において、S21は、通信開始時、通信不可能だったか判別する。YESの場合には、S22に進む。NOの場合には、終了する(END)。
【0033】
S22は、S21のYESで移動体7が移動中に通信開始したときに通信不可能領域であると判明したので、地図から現在地の通信可能か否かの情報を読み出す。これは、位置検出手段1によって検出した現在地について、地図領域記憶手段3および領域記憶手段4を探索して通信可能領域に入ったかの情報を読み出す。
【0034】
S23は、現在地が通信可能か判別する。YESの場合には、S24で通信可能領域に移動体7が入ったと判明したので、通信を開始する。一方、NOの場合には、S22を繰り返す。
【0035】
以上によって、移動体7が走行中に通信開始時に通信不可能領域であった場合、現在地をもとに地図情報上で通信可能領域に入ったと判明したときに通信を開始することが可能となる。
【0036】
図5は、本発明の説明国(図4)を示す。
図5において、移動体7は、図1の移動体通信装置10を持ち、地図情報上で所定の経路に従って走行するものである。ここでは、移動体7が地点Aで通信を開始したが通信不可能領域で通信できなく、地点Bの通信可能領域に入ったことが地図情報記憶部3および領域記憶手段4を探索して判明した場合に、通信手段2に通信先と通信を開始させる様子を示す。
【0037】
図6は、本発明の動作説明フローチャート(その3)を示す。
図6において、S31は、現在地の地図上に道路情報が有るか判別する。YESの場合には、終了する。NOの場合には、S32に進む。
【0038】
S32は、センタに現在地を中心に所定範囲内の最新の地図情報を要求する。これは、S31のNOで現在地の地図上の道路情報がないと判明したので、センタ6に現在地を中心に所定範囲の最新の地図情報を要求する。
【0039】
S33は、センタ6が最新の地図データベースの読み出しを行なう。
S34は、送信する。
【0040】
S35は、最新の地図情報で端末の地図情報を更新する。これは、センタ6に要求した地図情報で、端末(移動体通信制御装置が動作する端末)の地図情報(地図および道路情報を持つ地図情報)を更新して最新のものとする(例えば図7に示すように、最新の地図に更新する)。
【0041】
S36は、経路誘導並びに表示等を行なう。これは、S35で更新した最新の地図情報をもとに、移動体7の現在地をもとに経路誘導したり、表示したりする。
【0042】
S37は、現在地点に道路情報が無いか判別する。これは、最新の地図情報に更新した後、移動体7の現在地点をもとに当該最新の地図情報上に道路情報がないか判別する。YESの場合には、現在地点の道路情報がないと判明したので、S38でセンタに移動体の位置を道路情報が無いことを送信する。一方、NOの場合には、終了する。
【0043】
S39は、地図の誤りリスト表示(位置と道路情報が無いこと)を行なう。
以上によって、移動体7の現在位置の道路情報が地図上になかった場合、センタに現在位置の最新の道路情報を持つ地図情報を要求し、送信されてきた最新の地図情報で更新することが可能となる。そして、更新後の最新の地図情報上で現在位置の道路情報がなかった場合、センタに移動体7の位置と道路情報がない旨を通知し、センタ6で地図(道路情報)の誤りのリスト表示を行なう(位置と道路情報が無いことを表示する)。
【0044】
図7は、本発明の説明図(図6)を示す。
図7において、移動体7は、図1の移動体通信装置10を持ち、地図情報上で所定の経路に従って走行するものである。ここでは、移動体7が地点Aから地点Bに移動したときに当該地点Bで道路情報がない場合、センタ6に現在地と道路情報がない旨を通知し、最新の道路情報を含む地図情報の送信を受け、地図情報を最新のものに更新することが可能となる。
【0045】
図8は、本発明の動作説明フローチャート(その4)を示す。
図8において、S41は、オペレークによって、地図情報が誤りであると判断されたか判別する。YESの場合には、S42に進む。NOの場合には、終了する。
【0046】
S42は、センタに現在地を中心に所定範囲内の最新の地図情報を要求する。
S43は、センタ6が地図データベースの読み出しを行なう。
【0047】
S44は、送信する。
S45は、最新の地図情報で端末の地図情報を更新する。これは、センタ6から送信されてきた最新の地図情報で地図領域記憶手段3を更新して最新のものとする。
【0048】
S46は、地図を表示する。これは、更新した後の最新の地図を表示する。
S47は、オペレータによって、再度地図情報が誤りであると判断されたか判別する。YESの場合には、S48でセンタに移動体の位置と道路情報が誤りであることを送信する。一方、S47のNOの場合には、終了する。
【0049】
S49は、センタ6で地図の誤りのリスト表示する。これは、S48で端末(移動体通信装置10を動作させる端末)から送信されてきた移動体の現在位置と間違いの道路情報のリスト表示を行なう。
【0050】
以上によって、移動体7の現在位置の地図情報に誤りがありセンタ6に最新の地図情報の送信を受けて地図領域記憶手段3を最新の地図情報で更新すると共に表示し、再度道路情報に間違いあると指摘された場合に、移動体7の現在位置および道路情報が間違いの旨をセンタ6に送信し、地図の誤りリスト表示を行なうことが可能となる。
【0051】
図9は、本発明の説明図(図8)を示す。
図9において、移動体7は、図1の移動体通信装置10を持ち、地図情報上で所定の経路に従って走行するものである。ここでは、移動体7の現在位置の地図情報の誤りの指摘に対応して、センタ6に現在位置と所定範囲の最新の地図情報を要求し、送信を受けた最新の地図情報で地図領域記憶手段3を更新すると共に地図を表示し、再度間違いの旨の指摘を受けたときに、移動体7の現在位置および間違いの道路情報を通知し、地図の間違いのリスト表示を行なうことが可能となる。
【0052】
図10は、本発明の動作説明フローチャート(その5)を示す。
図10において、S51は、道路上の通信不可能領域を通らないように経路誘導を設定する。
【0053】
S52は、経路探索する。これは、S51で設定された経路誘導を行なうように地図領域記憶手段3および領域記憶手段4を探索して経路を見つける。
【0054】
S53は、経路が見つかったか判別する。YESの場合には、終了する。NOの場合には、S54に進む。
【0055】
S54は、複数の経路を探索する。これは、S51で設定した道路上で通信不可能領域を通らない経路を見つけることができなかったので、通信不可能領域を通る経路を複数見つける。
【0056】
S55は、通信不可能領域を通過する距離または時間がもっとも短い経路を選択(あるいはオペレータが選択)する。これは、S54で見つけた複数の経路のうち、通信不可能領域を通過する距離または時間が最も短い経路を誘導経路として選択する。
【0057】
以上によって、移動体7の現在位置からの移動方向に通信不可能領域があると判明したときに、当該通信不可能領域を通らない経路を探索し、見つからないときに通信不可能領域を通る複数の経路を見つけ、このうちから通信不可能領域を通る距離または時間が最も短い経路を誘導経路と選択し、移動体7を誘導することが可能となる。
【0058】
図11は、本発明の説明図(図10)を示す。
図11において、移動体7は、図1の移動体通信装置10を持ち、地図情報上で所定の経路に従って走行するものである。ここでは、移動体7の現在位置から移動方向に通信不可能領域があるときに、通信不可能領域を通らない経路が見つかればその経路に移動体7を誘導し、一方、見つからないときに通信不可能領域を通る複数の経路を探索し、そのうちから通信不可能領域を通る時間あるいは距離が最も短い経路を選択し、移動体7を誘導することが可能となる。
【産業上の利用可能性】
【0059】
本発明は、移動中に通信を行う移動体通信装置に関するものである。
【図面の簡単な説明】
【0060】
【図1】本発明のシステム構成図である。
【図2】本発明の動作説明フローチャート(その1)である。
【図3】本発明の説明図(図2)である。
【図4】本発明の動作説明フロ十チャート(その2)である。
【図5】本発明の説明図(図4)である。
【図6】本発明の動作説明フローチャート(その3)である。
【図7】本発明の説明図(図6)である。
【図8】本発明の動作説明フローチャート(その4)である。
【図9】本発明の説明図(図8)である。
【図10】本発明の動作説明フロナチャート(その5)である。
【図11】本発明の説明図(図10)である。
【符号の説明】
【0061】
1:位置検出手段
2:通信手段
3:地図領域記憶手段
4:領域記憶手段
5:制御手段
6:センタ
7:移動体
【特許請求の範囲】
【請求項1】
移動中に通信を行なう移動体通信装置において、
地図情報を格納した地図記憶手段と、
上記地図情報に対応づけて通信不可能あるいは通信可能な領域情報を記憶する領域記憶手段と、
移動体の現在位置を検出する位置検出手段と、
移動体の検出した現在位置をもとに上記領域記憶手段を探索して移動体の移動方向に通信不可能領域があると判明したときに、当該通信不可能領域を回避した複数の経路を見つけて通信不可能領域を通過する距離あるいは時間が最も短い経路に移動体を誘導する手段と
を備えたことを特徴とする移動体通信装置。
【請求項1】
移動中に通信を行なう移動体通信装置において、
地図情報を格納した地図記憶手段と、
上記地図情報に対応づけて通信不可能あるいは通信可能な領域情報を記憶する領域記憶手段と、
移動体の現在位置を検出する位置検出手段と、
移動体の検出した現在位置をもとに上記領域記憶手段を探索して移動体の移動方向に通信不可能領域があると判明したときに、当該通信不可能領域を回避した複数の経路を見つけて通信不可能領域を通過する距離あるいは時間が最も短い経路に移動体を誘導する手段と
を備えたことを特徴とする移動体通信装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2006−23316(P2006−23316A)
【公開日】平成18年1月26日(2006.1.26)
【国際特許分類】
【出願番号】特願2005−229186(P2005−229186)
【出願日】平成17年8月8日(2005.8.8)
【分割の表示】特願平8−326746の分割
【原出願日】平成8年12月6日(1996.12.6)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成18年1月26日(2006.1.26)
【国際特許分類】
【出願日】平成17年8月8日(2005.8.8)
【分割の表示】特願平8−326746の分割
【原出願日】平成8年12月6日(1996.12.6)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]