
移動体間干渉測位装置及び方法
【課題】移動体間干渉測位の精度の向上。
【解決手段】本発明による移動体間干渉測位装置は、第1移動体で観測された位相積算値に関する観測データを取得する第1観測データ取得手段と、第2移動体で観測された位相積算値に関する観測データを取得する第2観測データ取得手段と、干渉測位に用いる衛星のペアを決定する衛星ペア決定手段と、前記衛星ペア決定手段により決定されたペアの衛星間で、前記第1観測データ取得手段で取得された観測データと、前記第2観測データ取得手段で取得された観測データの一重位相差若しくは二重位相差を取り、該一重位相差若しくは二重位相差を取った観測データを用いて、干渉測位により前記第1移動体と前記第2移動体の間の相対位置関係を特定する干渉測位手段とを備えることを特徴とする。
【解決手段】本発明による移動体間干渉測位装置は、第1移動体で観測された位相積算値に関する観測データを取得する第1観測データ取得手段と、第2移動体で観測された位相積算値に関する観測データを取得する第2観測データ取得手段と、干渉測位に用いる衛星のペアを決定する衛星ペア決定手段と、前記衛星ペア決定手段により決定されたペアの衛星間で、前記第1観測データ取得手段で取得された観測データと、前記第2観測データ取得手段で取得された観測データの一重位相差若しくは二重位相差を取り、該一重位相差若しくは二重位相差を取った観測データを用いて、干渉測位により前記第1移動体と前記第2移動体の間の相対位置関係を特定する干渉測位手段とを備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体間の相対位置関係を特定する移動体間干渉測位装置及び方法に関する。
【背景技術】
【0002】
従来から、近接車両でのGPS電波伝搬時間のデータと自車でのGPS電波伝搬時間のデータとの差分を求めると共に、これにより求められた3個以上のGPS電波伝搬時間差分値と未知数となる相対位置との関係式を連立させて解くことによって自車を基準とした近接車両の相対位置を求める、GPS電波伝搬時間差分による相対位置算出手段と、を備えたことを特徴とする車車間通信による相対位置算出装置が知られている(例えば、特許文献1参照)。
【特許文献1】特開平10−148665号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記の特許文献1に記載の技術では、測位にGPS電波伝搬時間の差分と、自車と衛星とを結んだ線分の相対座標系の各軸とのなす角度の方向余弦とを用いて表現する幾何的な関係式を設定し、当該関係式を連立させることで相対位置を求めている。しかしながら、かかる構成では、誤差の大きいGPS電波伝搬時間のみを観測データとして利用する点や、自車と衛星とを結んだ線分の相対座標系の各軸とのなす角度の方向余弦を正確に求めることができない点等に起因して、測位精度の観点で問題がある。
【0004】
そこで、本発明は、測位精度の高い移動体間干渉測位装置及び方法の提供を目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するため、第1の発明は、移動体間干渉測位装置に関し、第1移動体で観測される観測データであって、衛星電波の搬送波の位相積算値に関する観測データを取得する第1観測データ取得手段と、
第2移動体で観測される観測データであって、衛星電波の搬送波の位相積算値に関する観測データを取得する第2観測データ取得手段と、
干渉測位に用いる衛星のペアを決定する衛星ペア決定手段と、
前記衛星ペア決定手段により決定されたペアの衛星間で、前記第1観測データ取得手段で取得された観測データと、前記第2観測データ取得手段で取得された観測データの一重位相差若しくは二重位相差を取り、該一重位相差若しくは二重位相差を取った観測データを用いて、干渉測位により前記第1移動体と前記第2移動体の間の相対位置関係を特定する干渉測位手段とを備えることを特徴とする。
【0006】
第2の発明は、第1の発明に係る移動体間干渉測位装置において、
前記第1観測データ取得手段で取得された観測データ、及び、前記第2観測データ取得手段で取得された観測データは、共に、共通の衛星に関する搬送波の位相積算値の計測データと、共通の衛星に関する擬似距離の計測データとを含み、
前記相対位置関係は、前記観測データをエポック毎に独立して用いる瞬時測位法により特定されることを特徴とする。
【0007】
第3の発明は、第1又は2の発明に係る移動体間干渉測位装置において、
前記衛星ペア決定手段により決定されたペアの衛星間における前記第1移動体までの距離の逆数の差に基づいて、各ペア間の前記一重位相差若しくは二重位相差を取った観測データが測位結果に与える影響を、重み付けにより調整することを特徴とする。
【0008】
第4の発明は、第1又は2の発明に係る移動体間干渉測位装置において、
前記干渉測位手段は、前記一重位相差若しくは二重位相差を取った観測データと共に、単独測位により導出された前記第1移動体の位置情報を用いて、前記相対位置関係を特定し、
前記単独測位により導出された前記第1移動体の位置情報は、前記衛星ペア決定手段により決定された各ペアを構成する衛星のみを用いた単独測位により導出されることを特徴とする。
【0009】
第5の発明は、第1又は2の発明に係る移動体間干渉測位装置において、
前記衛星ペア決定手段は、前記第1移動体と各衛星との間の距離に基づいて、前記衛星のペアを決定することを特徴とする。
【0010】
第6の発明は、第5の発明に係る移動体間干渉測位装置において、
前記衛星ペア決定手段は、前記第1移動体までの距離の差が小さい2つの衛星同士を前記ペアとして決定することを特徴とする。
【0011】
第7の発明は、第5の発明に係る移動体間干渉測位装置において、
前記衛星ペア決定手段は、前記第1移動体までの距離の逆数の差が小さい2つの衛星同士を前記ペアとして決定することを特徴とする。
【0012】
第8の発明は、第5の発明に係る移動体間干渉測位装置において、
前記衛星ペア決定手段は、前記第1移動体までの距離が大きい衛星を優先して前記ペアを構成させることを特徴とする。
【0013】
第9の発明は、第5の発明に係る移動体間干渉測位装置において、
前記衛星ペア決定手段は、あるペアの衛星間における前記第1移動体までの距離の逆数の差が所定閾値を超えて大きくなった場合、該ペアに代えて、他のペアを決定することを特徴とする。
【0014】
第10の発明は、第5の発明に係る移動体間干渉測位装置において、
前記衛星ペア決定手段は、前記干渉測位手段で導出される整数解がFIXしない場合に、前記第1移動体までの距離が大きい衛星を優先して用いて、前記ペアを再決定することを特徴とする。
【0015】
第10の発明は、第5の発明に係る移動体間干渉測位方法に関し、第1移動体で観測された衛星電波の観測データを取得する第1観測データ取得段階と、
第2移動体で観測された衛星電波の観測データを取得する第2観測データ取得段階と
前記第1移動体と各衛星との間の距離に基づいて、該距離が近い衛星同士がペアを構成するように、干渉測位に用いる衛星のペアを決定する衛星ペア決定段階と、
前記衛星ペア決定段階で決定されたペアの衛星間で、前記第1観測データ取得段階で取得された観測データと、前記第2観測データ取得段階で取得された観測データの一重位相差若しくは二重位相差を取り、該一重位相差若しくは二重位相差を取った観測データを用いて、干渉測位により前記第1移動体と第2移動体の間の相対位置関係を特定する干渉測位段階とを備えることを特徴とする。
【発明の効果】
【0016】
本発明によれば、測位精度の高い移動体間干渉測位装置及び方法が得られる。
【発明を実施するための最良の形態】
【0017】
以下、図面を参照して、本発明を実施するための最良の形態の説明を行う。
【0018】
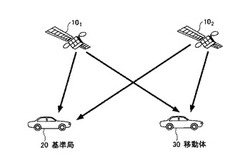
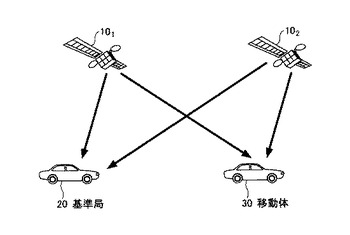
図1は、本発明に係る移動体間干渉測位装置が適用されるGPS(Global Positioning System)の全体的な構成を示すシステム構成図である。図1に示すように、GPSは、地球周りを周回するGPS衛星10を備える。車両20,30は、地球上に位置し、地球上を移動しうる。尚、車両20,30は、あくまで移動体の一例であり、その他の移動体としては、自動二輪車、鉄道、船舶、航空機、ホークリフト、ロボットや、人の移動に伴い移動する携帯電話等の情報端末等がありうる。
【0019】
車両20は、基準局として機能する車両であり、以下では、基準局ともいう。但し、車両20は、一般的な固定の基準局と異なり、移動する基準局である。
【0020】
車両30は、車両20(基準局)に対する相対位置が測位される対象の車両であり、本実施例の移動体間干渉測位装置が搭載される車両である。但し、車両30は、状況に応じて他の車両(例えば車両20)に対して基準局として機能するものであってもよい。
【0021】
GPS衛星10は、航法メッセージを地球に向けて常時放送する。航法メッセージには、対応するGPS衛星10に関する軌道情報、時計の補正値、電離層の補正係数が含まれている。航法メッセージは、C/Aコードにより拡散されL1搬送波(周波数:1575.42MHz)に乗せられて、地球に向けて常時放送されている。
【0022】
尚、現在、24個のGPS衛星10が高度約20,000kmの上空で地球を一周しており、各4個のGPS衛星10が55度ずつ傾いた6つの地球周回軌道面に均等に配置されている。従って、天空が開けている場所であれば、地球上のどの場所にいても、常時、少なくとも5個以上のGPS衛星10が観測可能である。
【0023】
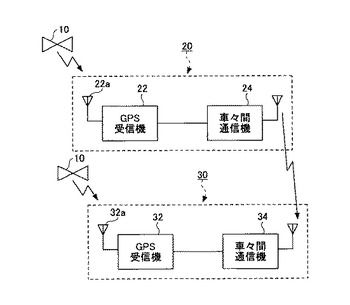
図2は、車両20と車両30の主要構成を示す図である。車両20には、GPS受信機22及び車車間通信機24が設けられる。また、車両30には、本実施例の移動体間干渉測位装置として機能するGPS受信機32及び車車間通信機34が設けられる。
【0024】
GPS受信機22、32内には、その周波数がGPS衛星10の搬送周波数と一致する発振器(図示せず)が内蔵されている。GPS受信機22、32は、GPSアンテナ22a、32aを介してGPS衛星10から受信した電波(衛星信号)を中間周波数に変換後、GPS受信機22、32内で発生させたC/Aコードを用いてC/Aコード同期を行い、航法メッセージを取り出す。
【0025】
GPS受信機22は、GPS衛星10iからの搬送波に基づいて、次式に示すように、時刻tにおける搬送波位相の積算値Φik(t)を計測する。位相積算値Φikは、L1波及びL2波(周波数:1227.6MHz)の双方に対してそれぞれ計測されてもよい。
Φik(t)=Θik(t)−Θik(t−τk)+Nik+εik(t) 式(1)
尚、位相積算値Φikについて、添え字i(=1,2,・・・)は、GPS衛星10iに割り当てられた番号を示し、添え字kは基準局側での積算値であることを示す。Nikは、整数値バイアスを示し、εikは、ノイズ(誤差)を表わす。
【0026】
また、GPS受信機22は、GPS衛星10iからの各搬送波に乗せられるC/Aコードに基づいて、擬似距離ρikを計測する。
ρik(t)=c・τk+bk 式(2)
ここで、cは光速であり、bkは、クロックバイアスとも称され、GPS受信機22内の時計誤差による距離誤差に対応する。
【0027】
車両20は、GPS受信機22で計測した位相積算値Φik及び擬似距離ρikを車車間通信機24により車両30に送信する。
【0028】
GPS受信機32は、同様に、GPS衛星10iからの搬送波に基づいて、搬送波位相の位相積算値Φiuを計測する。位相積算値Φiuは、L1波及びL2波の双方に対してそれぞれ計測されてもよい。尚、位相積算値Φiuについて、添え字i(=1,2,・・・)は、GPS衛星10iに割り当てられた番号を示し、添え字uは車両30側での積算値であることを示す。位相積算値Φiuは、同様に、次式に示すように、搬送波受信時刻tでの発振器の位相Θiu(t)と、GPS衛星10iでの衛星信号発生時の搬送波位相Θiu(t−τ)との差として得られる。
Φiu(t)=Θiu(t)−Θiu(t−τu)+Niu+εiu(t) 式(3)
ここで、τuは、GPS衛星10からGPS受信機32までのトラベル時間を示し、εiuは、ノイズ(誤差)を表わす。尚、位相差の観測開始時点では、GPS受信機32は、搬送波位相の1波長以内の位相を正確に測定できるが、それが何波長目に相当するかを確定できない。このため、位相積算値Φiu(t)には、上式に示すように、不確定な要素として整数値バイアスNiuが導入される。
【0029】
また、GPS受信機32は、GPS衛星10iからの各搬送波に乗せられるC/Aコードに基づいて、擬似距離ρiuを計測する。ここで計測される擬似距離ρiuは、以下のように距離誤差等の誤差を含んでいる。
ρiu(t)=c・τu+bu 式(4)
ここで、buは、クロックバイアスとも称され、GPS受信機32内の時計誤差による距離誤差に対応する。
【0030】
また、GPS受信機32は、上述の計測を行う他、図3を参照して後述する各種処理を行う。
【0031】
車車間通信機24、34は、互いに双方向通信を行うように構成されている。本例では、基準局として機能する車両20の車車間通信機24が、車両30の車車間通信機34に対して、GPS受信機22で計測した位相積算値Φik及び擬似距離ρikを無線通信網を介して送信する。以下では、GPS受信機22で計測した位相積算値Φik及び擬似距離ρikのデータを総称して「観測データ」ともいい、位相積算値Φikのデータを、L1波及びL2波のそれぞれに対応して、それぞれ「L1データ」及び「L2データ」ともいい、擬似距離ρikのデータを「C/Aデータ」ともいう。
【0032】
図3は、本実施例の車両20,30においてそれぞれ実行される主要処理を示すブロック図である。尚、車両30側の構成において、各部42,44,46,48は、GPS受信機32により実現されるが、GPS受信機32に接続される他のマイクロコンピューター等により実現されてもよい。
【0033】
図3に示すように、基準局としての車両20においては、所定の周期毎に、観測されたL1データ、L2データ及びC/Aデータからなる観測データの送信データが生成され、車両30に供給される。また、車両20においては、所定の周期毎に、車両20の位置が測位され、その測位位置が車両30に供給される。この測位は、例えば観測されたC/Aデータを用いる単独測位により実現されてもよい。C/Aデータを用いる単独測位方法は広く知られているので説明を省略する。
【0034】
車両30においては、所定の周期毎に、基準局側から観測データが受信される。また、GPS受信機32において、車両30側の位相積算値Φiu(L1データ、L2データ)及び擬似距離ρiu(C/Aデータ)が取得される。これらの基準局側の観測データと車両30側の観測データは、各データはGPS時刻やPSS信号等を利用して同期が取られてよい。基準局側の観測データと車両30側の観測データは、先ず、観測データ誤差補正部40に供給される。
【0035】
観測データ誤差補正部40においては、基準局側の観測データと車両30側の観測データとを適切にペアリングすることで、観測データ内に含まれる誤差が除去される。観測データ誤差補正部40における具体的な処理は後述するが、観測データ誤差補正部40では、基本的な考え方として、車車間RTKの主要な誤差成分Δが小さくなるような選択態様で、基準局側及び車両30側の双方で観測可能な複数のGPS衛星10のうちから、車車間RTKに用いるGPS衛星10のペアが、複数組、決定される。即ち、観測データの二重位相差を取るGPS衛星10のペアが、車車間RTKの主要な誤差成分Δが小さくなるように、複数組決定される。GPS衛星10のペアは、測位に必要な4組以上決定される。
【0036】
ここで、車車間RTKの主要な誤差成分Δの1つは、次の式で表される。
Δjh=ε(1/Djk−1/Dhk)
上記式において、Djkは、車両20とGPS衛星10iとの間の距離であり、車両20の位置の測位結果(例えば上述の単独測位の結果)と、GPS衛星10iの位置とに基づいて算出される。GPS衛星10jの位置は、航法メッセージに含まれる衛星軌道情報や国際GPS機関(IGS)等の機関により提供される暦データを用いて算出されてもよい。同様に、Djkは、車両20とGPS衛星10hとの間の距離であり、車両20の位置の測位結果(例えば上述の単独測位の結果)と、GPS衛星10hの位置とに基づいて算出される。Δjh=ε(1/Djk−1/Dhk)で表される誤差成分Δの意義は、後述する。
【0037】
重み調整部42においては、車車間RTKに用いるGPS衛星10のペア毎に、後述の実数解算出部44で用いる重み付け係数w(行列の重み成分)を決定して、GPS衛星10の各ペア間の重みを調整する。基本的な考え方として、重み調整部42では、後述の誤差成分Δの大きいペアの方が、誤差成分Δの小さいペアよりも、測位結果に大きな影響を及ぼさないように、小さい重みが付与される。
【0038】
実数解算出部44においては、観測データの二重位相差を観測量とし車両30の位置と整数値バイアスの2重位相差とを状態変数として、最小二乗法により、車両30の位置(典型的には、車両20に対する相対位置)が測位される。例えば、下記の手順で車両30の位置が測位されてもよい。以下では、説明の簡略化のため、位相積算値について、L1波のみを用いる場合を説明するが、L2波の位相積算値も用いる場合、L2波の位相積算値を、L1波の位相積算値と同様の態様で、追加すればよい。
【0039】
先ず、ペアリングされた2つのGPS衛星10j、10h(i=j、h、但し、j≠h)に関する位相積算値の2重位相差は、次式となる。
Φjhku=(Φjk(t)−Φju(t))−(Φhk(t)−Φhu(t)) 式(5)
一方、位相積算値の2重位相差Φjhkuは、(GPS衛星10iとGPS受信機22若しくは32との距離)=(搬送波の波長L)×(位相積算値)という物理的な意味合いから、次のようになる。
【0040】
【数1】

ここで、式(6)における[Xk(t)、Yk(t)、Zk(t)]は、時刻tにおける基準局20のワールド座標系における座標値であり、[Xu(t)、Yu(t)、Zu(t)]は、時刻tにおける車両30の座標値(未知)であり、[Xj(t)、Yj(t)、Zj(t)]及び[Xh(t)、Yh(t)、Zh(t)]は、時刻tにおける各GPS衛星10j、10hの座標値である。Njhkuは、整数値バイアスの2重位相差である(即ち、Njhku=(Njk−Nju)−(Nhk−Nhu))。尚、時刻tは、例えばGPS時刻で同期が取られているものとする。
【0041】
また、時刻tにおける2つのGPS衛星10j、10h(i=j、h、但し、j≠h)に関する擬似距離の2重位相差は、次式となる。
ρjhku=(ρjk(t)−ρju(t))−(ρhk(t)−ρhu(t)) 式(7)
擬似距離の2重位相差ρjhkuは、次のように表せる。
【0042】
【数2】
ここで、式(8)における[Xk(t)、Yk(t)、Zk(t)]、[Xu(t)、Yu(t)、Zu(t)]、[Xj(t)、Yj(t)、Zj(t)]及び[Xh(t)、Yh(t)、Zh(t)]は、上記式(6)と同様である。また、時刻tは、例えばGPS時刻で同期が取られているものとする。
【0043】
観測量Zと状態変数ηの関係は、次の線形モデルで表現される。
Z=H・η+V 式(9)
ここで、Vは観測雑音を示す。ηは、状態変数を表わし、車両30の座標値(未知)及び整数値バイアスの2重位相差である。例えばペアリングされたGPS衛星10のペア(j、h)が(1,2)、(1,3)、(1,4)及び(1,5)の4組である場合、η=[Xu、Yu、Zu、N12ku、N13ku、N14ku、N15ku]Tである(Tは転置を表す)。式(9)の観測量Zは、位相積算値の2重位相差Φjhku(上記式(5)参照)及び擬似距離の2重位相差ρjhku(上記式(7)参照)である。例えば、ペアリングされたGPS衛星10のペア(j、h)が(1,2)、(1,3)、(1,4)及び(1,5)の4組である場合、Z=[Φ12ku、Φ13ku、Φ14ku、Φ15ku、ρ12ku、ρ13ku、ρ14ku、ρ15ku]Tである。上記式(9)の観測方程式は線形であるが、式(6)及び式(8)では、観測量Zは、状態変数Xu、Yu及びZuに関して非線形であるため、式(6)及び式(8)の各項が状態変数Xu、Yu及びZuのそれぞれで偏微分され、上記式(9)の観測行列Hが求められる。例えば、ペアリングされたGPS衛星10のペア(j、h)が(1,2)、(1,3)、(1,4)及び(1,5)の4組である場合、以下のように、観測行列Hは、以下の通りである。
【0044】
【数3】
ここで、数8のH1は、観測量Z1=[Φ12ku、Φ13ku、Φ14ku、Φ15ku]Tとした場合の観測行列であり、数8のH2は、観測量Z2=[ρ12ku、ρ13ku、ρ14ku、ρ15ku]Tとした場合の観測行列であり、観測行列Hは、2つの観測行列H1、H2が組み込まれた形となる。
【0045】
上記式(9)から、数3の観測行列Hを用いて最小二乗法で解くと、以下の通りηの実数解(フロート解)が得られる。
η=(HT・W・H)−1・HT・W・Z 式(10)
ここで、Wは、重み調整部42において重みが調整された重み行列であり、例えば、ペアリングされたGPS衛星10のペア(j、h)が(1,2)、(1,3)、(1,4)及び(1,5)の4組である場合、以下の通りである。
【0046】
【数4】
ここで、対角成分のw1、w2,w3、w4は、観測量Z1に関する重み付け係数であり、対角成分のwρ1、wρ2,wρ3、wρ4は、観測量Z2に関する重み付け係数であり、例えば、それぞれ、車車間RTKの主要な誤差成分Δjhを用いて設定されてもよい。例えば代表としてGPS衛星10のペア(1,2)に関して、w1=|1/Δ12|とされてよく、この場合、係数γ(例えばγは、1/200〜1/100の間の値)を用いて、wρ1=γ|1/Δ12|とされてよい。或いは、例えば代表としてGPS衛星10のペア(1,2)に関して、w1=(1/Δ12)2とされてよく、この場合、係数γ(例えばγは、1/200〜1/100の間の値)を用いて、wρ1=γ(1/Δ12)2とされてよい。尚、ここで、1より小さい係数γを設定して、wρ1を、w1よりも小さくするのは、C/Aデータの方がL1データ(又はL2データ)よりも精度が低いことを考慮したものである。
【0047】
整数解算出部46においては、実数解算出部44で算出された整数値バイアスの実数解(フロート解)に基づいて、整数値バイアスの整数解が算出される。例えば、実数解算出部44で算出された実数解に対して最も誤差の小さい整数解(即ち、波数)を第1候補として求め、次に誤差の小さい整数解を第2候補として求める。この手法としては、整数値バイアスの無相関化をはかり、整数解の探索空間を狭めて解を特定するLAMBDA法が使用されてよい。或いは、LAMBDA法に代えて、他の整数最小二乗法や簡易の四捨五入により整数解を導出してもよい。
【0048】
FIX判定部48においては、整数解算出部46で導出された整数解をFIX解とするか否かが判定される。即ち、整数解算出部46で導出された整数解の信頼性を判断し、信頼性が高い整数解が得られた場合には、当該整数解をFIXして、以後、当該整数解を用いたRTK測位により測位結果を出力していく。整数解の信頼性の判定方法は、多種多様であり、任意の適切な方法が使用されてもよい。例えば、レシオテストを適用して、整数解の信頼性が判定されてもよい。例えば、レシオテストの一例として、ペアリングされたGPS衛星10のペア(j、h)が(1,2)、(1,3)、(1,4)及び(1,5)の4組であり、それぞれ4つの整数値バイアスの実数解(n12、n13、n14、n15)、整数値バイアスの整数解の第1候補(N121、N131、N141、N151)及び第2候補(N122、N132、N142、N152)が算出される場合を想定する。このとき、レシオRは、以下に示すように、整数値バイアスの実数解と整数値バイアスの整数解の第1候補との間の距離(ノルム)と、整数値バイアスの実数解と整数値バイアスの整数解の第2候補との間の距離との間の比である。
R={(n12−N122)2+(n13−N132)2+(n14−N142)2+(n15−N152)2}/{(n12−N121)2+(n13−N131)2+(n14−N141)2+(n15−N151)2} 式(11)
レシオRは、一般的に、高い値であるほど整数値バイアスの整数解の第1候補の信頼度が高いことを表す。従って、適切な所定の閾値αを設定して、レシオRが所定の閾値αよりも大きい場合に、整数解の信頼性が高いと判定して、整数値バイアスの整数解の第1候補を採用することとしてよい。
【0049】
次に、観測データ誤差補正部40におけるペア決定処理について説明する。
【0050】
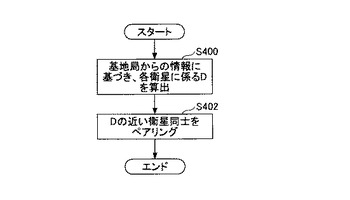
図4は、観測データ誤差補正部40におけるペア決定処理の一例を示すフローチャートである。
【0051】
ステップ400では、車両20(基準局)から供給される車両20の位置の測位結果に基づいて、車両20とGPS衛星10iの間の距離Dikが算出される。この際、距離Dikが算出されるGPS衛星10iは、現在車両20と車両30の双方で観測される共通のGPS衛星10iの全てであってよい。各GPS衛星10iの位置は、航法メッセージに含まれる衛星軌道情報や国際GPS機関(IGS)等の機関により提供される暦データを用いて算出されてもよい。
【0052】
ステップ402では、上記ステップ400で求めた各GPS衛星10iに係る距離Dikに基づいて、距離Dikが近いGPS衛星10i同士をペアとして決定する。これにより、車車間RTKの主要な誤差成分Δjh(=ε(1/Djk−1/Dhk))が小さくなるペアを決定することができ、この結果、このようにして決定されたペアを用いて測位される測位結果の精度が向上する。尚、本ステップ402で決定されるペアの数は、測位演算に必要な数以上であればよく、例えば4(固定値)であってもよいし、4以上の可変値であってもよく、後者の場合、例えば距離Dikの近似度合いに応じて可変されてもよい。
【0053】
ここで、車車間RTKの主要な誤差成分Δ(=ε(1/Djk−1/Dhk))は、上記数1や数2の式において、車両20の座標(Xk,Yk,Zk)まわりで展開して、主要な単独測位誤差成分を抽出したものである。具体的には、例えば数1の式において、Xkのみで考えると、数1の式をXkで偏微分すると、次の通りである。
【0054】
【数5】
分母の大きさ(車両20とGPS衛星10iの間の実距離)に対して、単独測位誤差は十分小さいので、分母のルートの付いた部分を、単独測位結果を用いて算出される距離Djk及びDhkで表し、数5の式の左辺をAと置くと、次のように表される。
【0055】
【数6】
他方、分子において、Xk方向の単独測位誤差をεとすると(即ち、単独測位で得られるXkは、真値Xkrに対して、Xkr=Xk+εであるとすると)、数6の式は、次の通りとなり、単独測位誤差成分Δjh(=ε(1/Djk−1/Dhk))が抽出される。
【0056】
【数7】
尚、ここでは、Xkのみで考えたが、Yk,Zkに関しても同様の表現で表されるΔjh(εのみが異なる)が抽出される。
【0057】
従って、図4に示す処理によれば、距離Dikが近いGPS衛星10i同士をペアとして用いて車車間RTKを行うので、車車間RTK特有の問題、即ち、基準局側の座標として正確に測量された座標(精度がmmオーダー)で無く単独測位で測位された座標(精度がmオーダー)が用いられることに起因した測位精度の悪化を防止することができる。即ち、図4に示す処理によれば、距離Dikが近いGPS衛星10i同士をペアとして用いて車車間RTKを行うことで、基準局側の座標が単独測位等の低精度の測位法で測位される場合でも、かかる影響を最小限に抑えて、精度の高い測位を実現することができる。
【0058】
次に、車両20(基準局)側の座標の算出方法の好ましい例について、図5を参照して説明する。
【0059】
図5は、本実施例の車車間RTKで使用される車両20側の座標の好ましい算出方法の一例を示すフローチャートである。図5の処理は、車両20側のGPS受信機22で実行される。
【0060】
ステップ500では、車両30側のRTK測位に用いられるGPS衛星10iのペアを特定するための情報を、車車間通信器24,24間の通信を介して車両30側から取得する。即ち、上述の図4で示すような処理により決定されたGPS衛星10iのペアを特定するための情報を取得する。
【0061】
ステップ502では、RTK測位に用いられるGPS衛星10iのペアを構成するGPS衛星10iのみを用いて、単独測位により車両20の位置を測位する。例えば、車両30側のRTK測位に用いられるGPS衛星10iのペア(j、h)が(1,2)、(1,3)、(1,4)及び(1,5)の4組である場合、例え車両30にて他のGPS衛星10i(例えば、GPS衛星106)が観測可能であっても、5つのGPS衛星101,102,103,104,105のみのC/Aデータを用いて、単独測位により車両20の位置を測位する。
【0062】
ステップ504では、上記ステップ502で得られた単独測位結果(車両20の位置の座標)を観測データと共に、車車間通信器24,24間の通信を介して車両30側に送信する。
【0063】
このように図5に示す処理によれば、車両30側のRTK測位に用いられるGPS衛星10iのペアを構成するGPS衛星10iのみを用いて単独測位により車両20の位置を測位するので、当該測位結果を用いて車両30側でRTK測位する段階で、車両20の位置に含まれる単独測位誤差の影響が効率的に抑制され、精度の高い測位を実現することができる。
【0064】
尚、図5に示す処理は、車両30側のGPS受信機32で実行することも可能である。これは、車両30側のGPS受信機32がGPS受信機22から観測データ(C/Aデータ)を受信するので、車両30側のGPS受信機32によっても単独測位により車両20の位置を測位することができるからである。このような構成によれば、車両20と車両30間での通信量を低減することができる。
【0065】
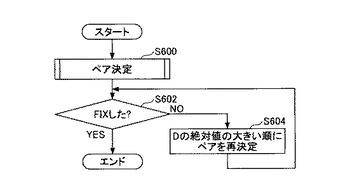
図6は、上述の図4のペア決定処理後に実行されてよい観測データ誤差補正部40におけるペア再決定処理の一例を示すフローチャートである。
【0066】
ステップ600では、例えば上述の図4のペア決定処理に従って、測位演算に用いるGPS衛星10iの各ペアが決定される。各ペアが決定されると、上述の如く各部42,44,46,48における処理が決定されたペアを用いて実行される。尚、このとき、実数解算出部44において用いられる車両20の位置は、好ましくは、上述の図5の示す処理により得られた測位結果が用いられる。
【0067】
ステップ602では、FIX判定部48における判定結果に基づいて、上記ステップ600で決定されたペアを用いて得られた整数解がFIXしたか否かが判定される。整数解がFIXした場合には、上記ステップ600で決定されたペアが適切であったと判断して、そのまま終了する。他方、整数解がFIXしない場合には、ステップ604に進む。
【0068】
ステップ604では、誤差成分Δが小さくなるように、分母のDikの絶対値が大きい順にペアリングを行い、測位演算に用いるGPS衛星10iのペアを再決定する。例えば、ここで観測量間の線形独立性を確保するために基準衛星を用いる構成であれば、Dikの絶対値が最も大きいGPS衛星10iを基準衛星に設定し、Dikの絶対値が次に大きい4つのGPS衛星10iを選択し、当該選択した4つのGPS衛星10iのそれぞれを、基準衛星とペアリングして、4組のペアを決定してもよい。また、基準衛星を用いない構成であれば、Dikの絶対値が大きい4つ又は5つのGPS衛星10iを選択し、当該選択した4つ又は5つのGPS衛星10iから、4組のペアを決定してもよい。この際、図4に示した処理と同様の考え方で、当該選択した4つのGPS衛星10iから、Dikの近いGPS衛星10i同士をペアリングして、4組のペアを決定してもよい。
【0069】
このように図6に示す処理によれば、FIX判定部48において整数解がFIXしない場合でも、再度、誤差成分Δが小さくなるように測位演算に用いるGPS衛星10iのペアが再決定されるので、FIX判定部48において整数解がFIXせずに測位が行えない状況を適切に防止することができる。
【0070】
尚、図6に示す処理において、上記ステップ604で測位演算に用いるGPS衛星10iのペアが再決定された場合には、それに応じて、図5の処理が実行され、再決定されたペアを構成するGPS衛星10iのみを用いて、車両20の位置が単独測位されることとしてもよい。
【0071】
次に、観測データ誤差補正部40におけるペア決定処理のその他の例について幾つか説明する。以下で説明するペア決定処理のそれぞれは、例えば図4のペア決定処理に代えて実行されてもよいし、図6に示したペア再決定処理(ステップ604)で使用されてもよい。
【0072】
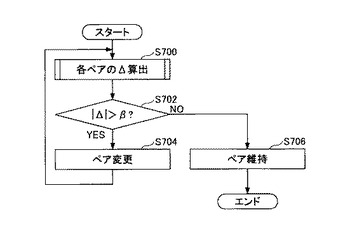
図7は、観測データ誤差補正部40におけるペア決定処理のその他の例を示すフローチャートである。
【0073】
ステップ700では、今回の測位周期で用いる予定の各ペアに関して、Δがそれぞれ算出される。今回の測位周期で用いる予定の各ペアは、前回の測位周期で用いた各ペアと同一であってもよいし、その他の方法で決定されてもよいし、或いは、ランダムに決定されてもよい。
【0074】
ステップ702では、上記ステップ700で算出された各Δのうち、絶対値が所定の閾値βよりも大きいΔが存在するか否かが判定される。所定の閾値βは、FIX判定部48において整数解がFIXしないような誤差成分Δに対応し、試験や解析結果等を用いて適合されてよい。絶対値が所定の閾値βよりも大きいΔが存在する場合には、ステップ704に進み、絶対値が所定の閾値βよりも大きいΔが存在しない場合には、ステップ706に進む。
【0075】
ステップ704では、今回の測位周期で用いる予定の各ペアが適切で無いと判断して、今回の測位周期で用いる予定の各ペアを変更する。このとき、各ペアを全て変更してもよいし、或いは、例えば絶対値が所定の閾値βよりも大きいΔとなるペアだけ、他の新たなペアに置き換えることとしてもよい。他の新たなペアは、図4で示したような方法で決定されてもよいし、その他の方法で決定されてもよいし、或いは、ランダムに決定されてもよい。
【0076】
ステップ706では、今回の測位周期で用いる予定の各ペアが適切であると判断して、今回の測位周期で用いる予定の各ペアを、今回の測位周期で用いるペアとして決定(確定)する。
【0077】
この図7に示す処理によれば、観測データ誤差補正部40において誤差成分Δが所定の閾値βを超えるようなペアを排除することができるので、後段の各部44,46において精度の高い測位を実現することができる。
【0078】
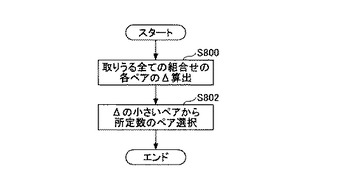
図8は、観測データ誤差補正部40におけるペア決定処理のその他の例を示すフローチャートである。
【0079】
ステップ800では、現在車両20と車両30の双方で観測される共通のGPS衛星10iを用いて、取りうる全通りのペアに関して、Δがそれぞれ算出される。例えば、現在車両20と車両30の双方で観測される共通のGPS衛星10iがN個ある場合、NC2通り(Cはコンビネーション)の数のペアに関して、Δがそれぞれ算出される。
【0080】
ステップ802では、上記ステップ800で算出された各Δに基づいて、Δの絶対値が小さいものから順に所定数のペアを、今回の測位周期で用いるペアとして決定する。所定数は、測位に用いるペアの数であり、例えば4以上の固定値であってもよいし、4以上の可変値であってもよい。
【0081】
この図8に示す処理によれば、観測データ誤差補正部40において最小のΔとなるペアを決定することができるので、後段の各部44,46において精度の高い測位を実現することができる。
【0082】
尚、図8に示す処理は、例えば図7に示した処理と組み合わせて実現することも可能である。例えば、初回の測位周期では図8に示す処理により測位に用いるペアを決定し、その後の測位周期では、図7に示す処理により測位に用いるペアを決定してもよい。この場合、図7に示す処理のステップ700では前回周期の各ペア(即ち、図8の処理で決定したペア)が、今回の測位周期で用いる予定の各ペアとして決定されてよく、また、ステップ704でペアを変更する場合は、図8に示す処理により、測位に用いるペアが再決定されてよい。
【0083】
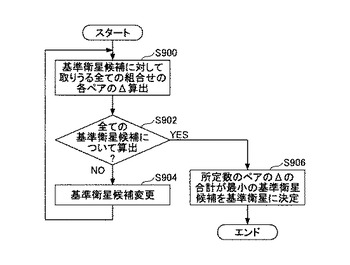
図9は、観測データ誤差補正部40におけるペア決定処理のその他の例を示すフローチャートである。
【0084】
ステップ900では、現在車両20と車両30の双方で観測される共通のGPS衛星10iのうちの、特定のGPS衛星10iを基準衛星候補としたときに、当該基準衛星候補に対して取りうる全通りのペアに関して、Δがそれぞれ算出される。例えば、現在車両20と車両30の双方で観測される共通のGPS衛星10iがN個ある場合、(N−1)通りのペアに関して、Δがそれぞれ算出される。
【0085】
ステップ902では、現在車両20と車両30の双方で観測される共通のGPS衛星10iの全てについて、それぞれが基準衛星候補となったか否かが判定される。肯定判定の場合、ステップ906に進み、否定判定の場合には、ステップ904に進む。
【0086】
ステップ904では、基準衛星候補を変更して、ステップ900に戻る。このようにして、現在車両20と車両30の双方で観測される共通のGPS衛星10iの全てについて、それぞれを基準衛星候補としたときに、当該基準衛星候補に対して取りうる全通りのペアに関して、Δがそれぞれ算出される。
【0087】
ステップ906では、上記ステップ900の算出結果に基づいて、基準衛星候補毎に、Δの絶対値が小さいものから順に所定数のペアを抽出し、当該抽出した所定数のペアのΔの絶対値の合計値(合算値)を導出し、当該合計値が最も小さい基準衛星候補を、基準衛星として決定(確定)する。所定数は、測位に用いるペアの数であり、例えば4以上の固定値であってもよいし、4以上の可変値であってもよい(但し、基準衛星候補間では共通の数を用いる)。
【0088】
この図8に示す処理によれば、観測データ誤差補正部40において基準衛星を用いるペアリング方法で最小のΔとなるペアを決定することができるので、後段の各部44,46において精度の高い測位を実現することができる。また、基準衛星を用いるペアリング方法で最小のΔとなるペアを決定するので、最も適切な基準衛星を設定して、精度の高い測位を実現することができる。
【0089】
尚、図9に示す処理は、例えば図7に示した処理と組み合わせて実現することも可能である。例えば、初回の測位周期では図9に示す処理により測位に用いるペアを決定し、その後の測位周期では、図7に示す処理により測位に用いるペアを決定してもよい。この場合、図7に示す処理のステップ700では前回周期の各ペア(即ち、図9の処理で決定したペア)が、今回の測位周期で用いる予定の各ペアとして決定されてよく、また、ステップ704でペアを変更する場合は、図9に示す処理により、測位に用いるペアが再決定されてよい。
【0090】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形及び置換を加えることができる。
【0091】
例えば、上述した実施例では、Δが反映された重みを持つ重み行列Wを用いて、重みつきの最小二乗法により実数解が求められているが、重み行列Wを用いずに(即ち重み行列Wを単位行列として)、通常の最小二乗法により実数解を求めてもよい。これは、上述の如くΔが小さくなるようなペアが決定されている場合には重み行列Wを用いなくても、誤差要因Δの影響が抑制され、精度の高い測位結果が期待できるからである。また、逆の発想から、Δが反映された重みを持つ重み行列Wを用いる場合には、上述の如くΔが小さくなるようなペアの決定方法が用いられなくてもよい。即ち、Δが反映された重みを持つ重み行列Wを用いる場合には、ランダムな決定方法(若しくは他の観点からの決定方法)により測位に用いるペアが決定されてもよい。但し、この場合も、好ましくは、Δが所定閾値βよりも大きくなるペアについては、別のペアに変更される。また、重み行列Wの重みは、他のパラメータ(例えば仰角やDOP)にも依存して決定されてもよい。
【0092】
また、上述した実施例では、好ましい実施例として、瞬時測位法により整数値バイアスの実数解を求めているが、整数値バイアスの実数解の算出方法は、多種多様であり、上述の方法以外の他の方法が採用されてもよい。例えば、擬似距離の2重位相差ρjhkuを用いずに、位相積算値の2重位相差Φjhkuだけを用いる方法も可能である。また、GPS受信機22、32が、GPS衛星10から発射されるL1波及びL2波(周波数:1227.6MHz)の双方を受信可能な2周波受信機である場合には、L2波に対する位相積算値の2重位相差Φjhkuが追加的若しくは代替的に観測量Zとして用いられてよい。また、他の帯域の搬送波(例えば、今後追加が予定されているL5帯の電波)に対する位相積算値の2重位相差Φjhkuが追加的若しくは代替的に観測量Zとして用いられてよい。同様に、擬似距離の2重位相差ρjhkuについても、C/Aコード以外の同様のPRNコード(擬似雑音符号)(例えば、Pコード等)に基づく擬似距離の1重又は2重位相差ρjhkuが、追加的若しくは代替的に観測量Zとして用いられてよい。上述した整数値バイアスの実数解の算出方法では、上述の如く2重位相差を取ることでGPS受信機22,32内での発振器の初期位相、及び、時計誤差等の影響を消去しているが、一重位相差を取る構成であってもよい。また、上述の方法では、電離層屈折効果、対流圏屈折効果及びマルチパスの影響を無視しているが、これらを考慮するものであってもよい。また、その他の例として、最小二乗法に代えて、カルマンフィルタを用いてもよい。この場合、前回エポックでの推定(測位)結果が今回エポックの推定結果に影響を及ぼさないように、状態変数や誤差共分散行列の初期化をエポック毎に行う瞬時測位を実現してもよいし、状態変数や誤差共分散行列の初期化を行うことなく、通常的なカルマンフィルタの適用によりエポック毎に状態変数や誤差共分散行列を更新(引継ぎ)することとしてもよい。また、車両30の移動に起因した車両特有の動的状態量を考慮するため、車両30に搭載される車両センサ(車速センサや加速度センサ等)に基づく車両の移動速度等の動的状態量を既知入力として、カルマンフィルタに導入してもよい。また、車両30の移動履歴から該車両30の現時刻の状態を予測する移動体モデルをカルマンフィルタに導入してもよい。この場合、移動体モデルは、位置、速度、加速度、加加速度(加速度の微分値)のような車両30の移動状態を表すことができる任意のパラメータを用いて構成されてよい。例えば、車両30の速度vを一次のマルコフ過程と仮定して移動体モデルを構成して、カルマンフィルタに導入してもよい。
【0093】
また、上述した実施例において、車両20側で実行されていた各種処理の一部が、車両30側で実行されてもよく、逆に、車両30側で実行されていた各種処理の一部が、車両20側で実行されてもよい。例えば、車両30側で観測される観測データが車両30側から車両20側に供給され、車両20側で測位処理が実行されてもよい。この場合、測位結果が車車間通信により車両20側から車両30側に供給される。また、車両20の位置の測位(単独測位)は、車両30側で実行されてもよい。
【0094】
また、上述した実施例では、2台の車両20,30間での車車間RTKに関するものであったが、本発明は、3台以上の移動体が存在する状況にも適用可能である。3台以上の移動体が存在する状況では、それぞれの移動体のペア同士で独立して同様の車車間RTKを実行してもよいし、3台以上の移動体で協動して車車間RTKを行ってもよい。後者の場合、例えば車両20,30に加えて、第3の車両が存在する場合、車両20が車両30及び第3の車両の双方に対して基準局として機能してもよい。
【0095】
また、上述した実施例では、2台の車両20,30間での車車間RTKに関するものであったが、車両20,30との間で通信可能な第3の移動体(例えば車両)又は固定局が存在し、第3の移動体又は固定局が、車両20側で実行されていた各種処理、及び/又は、車両30側で実行されていた各種処理を実行してもよい。例えば、第3の移動体又は固定局が、車両20,30の双方から観測データを取得して、車両30側の各部40,42,44,46,48の機能を実行してもよい。この場合、第3の移動体又は固定局で得られた測位結果が、第3の移動体又は固定局から無線通信により車両20及び/又は30に供給されることとしてもよい。
【0096】
また、上述の実施例では、GPSに本発明が適用された例を示したが、本発明は、GPS以外の衛星システム、例えばガリレオ等の他のGNSS (Global Navigation Satellite System)にも適用可能である。
【図面の簡単な説明】
【0097】
【図1】移動体間干渉測位装置が適用されるGPSの全体的な構成を示すシステム構成図である。
【図2】車両20と車両30の主要構成を示す図である。
【図3】本実施例の車両20,30においてそれぞれ実行される主要処理を示すブロック図である。
【図4】観測データ誤差補正部40におけるペア決定処理の一例を示すフローチャートである。
【図5】本実施例の車車間RTKで使用される車両20側の座標の好ましい算出方法の一例を示すフローチャートである。
【図6】図4のペア決定処理後に実行されてよい観測データ誤差補正部40におけるペア再決定処理の一例を示すフローチャートである。
【図7】観測データ誤差補正部40におけるペア決定処理のその他の例を示すフローチャートである。
【図8】観測データ誤差補正部40におけるペア決定処理のその他の例を示すフローチャートである。
【図9】観測データ誤差補正部40におけるペア決定処理のその他の例を示すフローチャートである。
【符号の説明】
【0098】
10 GPS衛星
20 車両(基準局)
22 基準局側GPS受信機
24 基準局側車車間通信機
30 車両
32 車両側GPS受信機
34 車両側車車間通信機
40 観測データ誤差補正部
42 重み調整部
44 実数解算出部
46 整数解算出部
48 FIX判定部
【技術分野】
【0001】
本発明は、移動体間の相対位置関係を特定する移動体間干渉測位装置及び方法に関する。
【背景技術】
【0002】
従来から、近接車両でのGPS電波伝搬時間のデータと自車でのGPS電波伝搬時間のデータとの差分を求めると共に、これにより求められた3個以上のGPS電波伝搬時間差分値と未知数となる相対位置との関係式を連立させて解くことによって自車を基準とした近接車両の相対位置を求める、GPS電波伝搬時間差分による相対位置算出手段と、を備えたことを特徴とする車車間通信による相対位置算出装置が知られている(例えば、特許文献1参照)。
【特許文献1】特開平10−148665号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記の特許文献1に記載の技術では、測位にGPS電波伝搬時間の差分と、自車と衛星とを結んだ線分の相対座標系の各軸とのなす角度の方向余弦とを用いて表現する幾何的な関係式を設定し、当該関係式を連立させることで相対位置を求めている。しかしながら、かかる構成では、誤差の大きいGPS電波伝搬時間のみを観測データとして利用する点や、自車と衛星とを結んだ線分の相対座標系の各軸とのなす角度の方向余弦を正確に求めることができない点等に起因して、測位精度の観点で問題がある。
【0004】
そこで、本発明は、測位精度の高い移動体間干渉測位装置及び方法の提供を目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するため、第1の発明は、移動体間干渉測位装置に関し、第1移動体で観測される観測データであって、衛星電波の搬送波の位相積算値に関する観測データを取得する第1観測データ取得手段と、
第2移動体で観測される観測データであって、衛星電波の搬送波の位相積算値に関する観測データを取得する第2観測データ取得手段と、
干渉測位に用いる衛星のペアを決定する衛星ペア決定手段と、
前記衛星ペア決定手段により決定されたペアの衛星間で、前記第1観測データ取得手段で取得された観測データと、前記第2観測データ取得手段で取得された観測データの一重位相差若しくは二重位相差を取り、該一重位相差若しくは二重位相差を取った観測データを用いて、干渉測位により前記第1移動体と前記第2移動体の間の相対位置関係を特定する干渉測位手段とを備えることを特徴とする。
【0006】
第2の発明は、第1の発明に係る移動体間干渉測位装置において、
前記第1観測データ取得手段で取得された観測データ、及び、前記第2観測データ取得手段で取得された観測データは、共に、共通の衛星に関する搬送波の位相積算値の計測データと、共通の衛星に関する擬似距離の計測データとを含み、
前記相対位置関係は、前記観測データをエポック毎に独立して用いる瞬時測位法により特定されることを特徴とする。
【0007】
第3の発明は、第1又は2の発明に係る移動体間干渉測位装置において、
前記衛星ペア決定手段により決定されたペアの衛星間における前記第1移動体までの距離の逆数の差に基づいて、各ペア間の前記一重位相差若しくは二重位相差を取った観測データが測位結果に与える影響を、重み付けにより調整することを特徴とする。
【0008】
第4の発明は、第1又は2の発明に係る移動体間干渉測位装置において、
前記干渉測位手段は、前記一重位相差若しくは二重位相差を取った観測データと共に、単独測位により導出された前記第1移動体の位置情報を用いて、前記相対位置関係を特定し、
前記単独測位により導出された前記第1移動体の位置情報は、前記衛星ペア決定手段により決定された各ペアを構成する衛星のみを用いた単独測位により導出されることを特徴とする。
【0009】
第5の発明は、第1又は2の発明に係る移動体間干渉測位装置において、
前記衛星ペア決定手段は、前記第1移動体と各衛星との間の距離に基づいて、前記衛星のペアを決定することを特徴とする。
【0010】
第6の発明は、第5の発明に係る移動体間干渉測位装置において、
前記衛星ペア決定手段は、前記第1移動体までの距離の差が小さい2つの衛星同士を前記ペアとして決定することを特徴とする。
【0011】
第7の発明は、第5の発明に係る移動体間干渉測位装置において、
前記衛星ペア決定手段は、前記第1移動体までの距離の逆数の差が小さい2つの衛星同士を前記ペアとして決定することを特徴とする。
【0012】
第8の発明は、第5の発明に係る移動体間干渉測位装置において、
前記衛星ペア決定手段は、前記第1移動体までの距離が大きい衛星を優先して前記ペアを構成させることを特徴とする。
【0013】
第9の発明は、第5の発明に係る移動体間干渉測位装置において、
前記衛星ペア決定手段は、あるペアの衛星間における前記第1移動体までの距離の逆数の差が所定閾値を超えて大きくなった場合、該ペアに代えて、他のペアを決定することを特徴とする。
【0014】
第10の発明は、第5の発明に係る移動体間干渉測位装置において、
前記衛星ペア決定手段は、前記干渉測位手段で導出される整数解がFIXしない場合に、前記第1移動体までの距離が大きい衛星を優先して用いて、前記ペアを再決定することを特徴とする。
【0015】
第10の発明は、第5の発明に係る移動体間干渉測位方法に関し、第1移動体で観測された衛星電波の観測データを取得する第1観測データ取得段階と、
第2移動体で観測された衛星電波の観測データを取得する第2観測データ取得段階と
前記第1移動体と各衛星との間の距離に基づいて、該距離が近い衛星同士がペアを構成するように、干渉測位に用いる衛星のペアを決定する衛星ペア決定段階と、
前記衛星ペア決定段階で決定されたペアの衛星間で、前記第1観測データ取得段階で取得された観測データと、前記第2観測データ取得段階で取得された観測データの一重位相差若しくは二重位相差を取り、該一重位相差若しくは二重位相差を取った観測データを用いて、干渉測位により前記第1移動体と第2移動体の間の相対位置関係を特定する干渉測位段階とを備えることを特徴とする。
【発明の効果】
【0016】
本発明によれば、測位精度の高い移動体間干渉測位装置及び方法が得られる。
【発明を実施するための最良の形態】
【0017】
以下、図面を参照して、本発明を実施するための最良の形態の説明を行う。
【0018】
図1は、本発明に係る移動体間干渉測位装置が適用されるGPS(Global Positioning System)の全体的な構成を示すシステム構成図である。図1に示すように、GPSは、地球周りを周回するGPS衛星10を備える。車両20,30は、地球上に位置し、地球上を移動しうる。尚、車両20,30は、あくまで移動体の一例であり、その他の移動体としては、自動二輪車、鉄道、船舶、航空機、ホークリフト、ロボットや、人の移動に伴い移動する携帯電話等の情報端末等がありうる。
【0019】
車両20は、基準局として機能する車両であり、以下では、基準局ともいう。但し、車両20は、一般的な固定の基準局と異なり、移動する基準局である。
【0020】
車両30は、車両20(基準局)に対する相対位置が測位される対象の車両であり、本実施例の移動体間干渉測位装置が搭載される車両である。但し、車両30は、状況に応じて他の車両(例えば車両20)に対して基準局として機能するものであってもよい。
【0021】
GPS衛星10は、航法メッセージを地球に向けて常時放送する。航法メッセージには、対応するGPS衛星10に関する軌道情報、時計の補正値、電離層の補正係数が含まれている。航法メッセージは、C/Aコードにより拡散されL1搬送波(周波数:1575.42MHz)に乗せられて、地球に向けて常時放送されている。
【0022】
尚、現在、24個のGPS衛星10が高度約20,000kmの上空で地球を一周しており、各4個のGPS衛星10が55度ずつ傾いた6つの地球周回軌道面に均等に配置されている。従って、天空が開けている場所であれば、地球上のどの場所にいても、常時、少なくとも5個以上のGPS衛星10が観測可能である。
【0023】
図2は、車両20と車両30の主要構成を示す図である。車両20には、GPS受信機22及び車車間通信機24が設けられる。また、車両30には、本実施例の移動体間干渉測位装置として機能するGPS受信機32及び車車間通信機34が設けられる。
【0024】
GPS受信機22、32内には、その周波数がGPS衛星10の搬送周波数と一致する発振器(図示せず)が内蔵されている。GPS受信機22、32は、GPSアンテナ22a、32aを介してGPS衛星10から受信した電波(衛星信号)を中間周波数に変換後、GPS受信機22、32内で発生させたC/Aコードを用いてC/Aコード同期を行い、航法メッセージを取り出す。
【0025】
GPS受信機22は、GPS衛星10iからの搬送波に基づいて、次式に示すように、時刻tにおける搬送波位相の積算値Φik(t)を計測する。位相積算値Φikは、L1波及びL2波(周波数:1227.6MHz)の双方に対してそれぞれ計測されてもよい。
Φik(t)=Θik(t)−Θik(t−τk)+Nik+εik(t) 式(1)
尚、位相積算値Φikについて、添え字i(=1,2,・・・)は、GPS衛星10iに割り当てられた番号を示し、添え字kは基準局側での積算値であることを示す。Nikは、整数値バイアスを示し、εikは、ノイズ(誤差)を表わす。
【0026】
また、GPS受信機22は、GPS衛星10iからの各搬送波に乗せられるC/Aコードに基づいて、擬似距離ρikを計測する。
ρik(t)=c・τk+bk 式(2)
ここで、cは光速であり、bkは、クロックバイアスとも称され、GPS受信機22内の時計誤差による距離誤差に対応する。
【0027】
車両20は、GPS受信機22で計測した位相積算値Φik及び擬似距離ρikを車車間通信機24により車両30に送信する。
【0028】
GPS受信機32は、同様に、GPS衛星10iからの搬送波に基づいて、搬送波位相の位相積算値Φiuを計測する。位相積算値Φiuは、L1波及びL2波の双方に対してそれぞれ計測されてもよい。尚、位相積算値Φiuについて、添え字i(=1,2,・・・)は、GPS衛星10iに割り当てられた番号を示し、添え字uは車両30側での積算値であることを示す。位相積算値Φiuは、同様に、次式に示すように、搬送波受信時刻tでの発振器の位相Θiu(t)と、GPS衛星10iでの衛星信号発生時の搬送波位相Θiu(t−τ)との差として得られる。
Φiu(t)=Θiu(t)−Θiu(t−τu)+Niu+εiu(t) 式(3)
ここで、τuは、GPS衛星10からGPS受信機32までのトラベル時間を示し、εiuは、ノイズ(誤差)を表わす。尚、位相差の観測開始時点では、GPS受信機32は、搬送波位相の1波長以内の位相を正確に測定できるが、それが何波長目に相当するかを確定できない。このため、位相積算値Φiu(t)には、上式に示すように、不確定な要素として整数値バイアスNiuが導入される。
【0029】
また、GPS受信機32は、GPS衛星10iからの各搬送波に乗せられるC/Aコードに基づいて、擬似距離ρiuを計測する。ここで計測される擬似距離ρiuは、以下のように距離誤差等の誤差を含んでいる。
ρiu(t)=c・τu+bu 式(4)
ここで、buは、クロックバイアスとも称され、GPS受信機32内の時計誤差による距離誤差に対応する。
【0030】
また、GPS受信機32は、上述の計測を行う他、図3を参照して後述する各種処理を行う。
【0031】
車車間通信機24、34は、互いに双方向通信を行うように構成されている。本例では、基準局として機能する車両20の車車間通信機24が、車両30の車車間通信機34に対して、GPS受信機22で計測した位相積算値Φik及び擬似距離ρikを無線通信網を介して送信する。以下では、GPS受信機22で計測した位相積算値Φik及び擬似距離ρikのデータを総称して「観測データ」ともいい、位相積算値Φikのデータを、L1波及びL2波のそれぞれに対応して、それぞれ「L1データ」及び「L2データ」ともいい、擬似距離ρikのデータを「C/Aデータ」ともいう。
【0032】
図3は、本実施例の車両20,30においてそれぞれ実行される主要処理を示すブロック図である。尚、車両30側の構成において、各部42,44,46,48は、GPS受信機32により実現されるが、GPS受信機32に接続される他のマイクロコンピューター等により実現されてもよい。
【0033】
図3に示すように、基準局としての車両20においては、所定の周期毎に、観測されたL1データ、L2データ及びC/Aデータからなる観測データの送信データが生成され、車両30に供給される。また、車両20においては、所定の周期毎に、車両20の位置が測位され、その測位位置が車両30に供給される。この測位は、例えば観測されたC/Aデータを用いる単独測位により実現されてもよい。C/Aデータを用いる単独測位方法は広く知られているので説明を省略する。
【0034】
車両30においては、所定の周期毎に、基準局側から観測データが受信される。また、GPS受信機32において、車両30側の位相積算値Φiu(L1データ、L2データ)及び擬似距離ρiu(C/Aデータ)が取得される。これらの基準局側の観測データと車両30側の観測データは、各データはGPS時刻やPSS信号等を利用して同期が取られてよい。基準局側の観測データと車両30側の観測データは、先ず、観測データ誤差補正部40に供給される。
【0035】
観測データ誤差補正部40においては、基準局側の観測データと車両30側の観測データとを適切にペアリングすることで、観測データ内に含まれる誤差が除去される。観測データ誤差補正部40における具体的な処理は後述するが、観測データ誤差補正部40では、基本的な考え方として、車車間RTKの主要な誤差成分Δが小さくなるような選択態様で、基準局側及び車両30側の双方で観測可能な複数のGPS衛星10のうちから、車車間RTKに用いるGPS衛星10のペアが、複数組、決定される。即ち、観測データの二重位相差を取るGPS衛星10のペアが、車車間RTKの主要な誤差成分Δが小さくなるように、複数組決定される。GPS衛星10のペアは、測位に必要な4組以上決定される。
【0036】
ここで、車車間RTKの主要な誤差成分Δの1つは、次の式で表される。
Δjh=ε(1/Djk−1/Dhk)
上記式において、Djkは、車両20とGPS衛星10iとの間の距離であり、車両20の位置の測位結果(例えば上述の単独測位の結果)と、GPS衛星10iの位置とに基づいて算出される。GPS衛星10jの位置は、航法メッセージに含まれる衛星軌道情報や国際GPS機関(IGS)等の機関により提供される暦データを用いて算出されてもよい。同様に、Djkは、車両20とGPS衛星10hとの間の距離であり、車両20の位置の測位結果(例えば上述の単独測位の結果)と、GPS衛星10hの位置とに基づいて算出される。Δjh=ε(1/Djk−1/Dhk)で表される誤差成分Δの意義は、後述する。
【0037】
重み調整部42においては、車車間RTKに用いるGPS衛星10のペア毎に、後述の実数解算出部44で用いる重み付け係数w(行列の重み成分)を決定して、GPS衛星10の各ペア間の重みを調整する。基本的な考え方として、重み調整部42では、後述の誤差成分Δの大きいペアの方が、誤差成分Δの小さいペアよりも、測位結果に大きな影響を及ぼさないように、小さい重みが付与される。
【0038】
実数解算出部44においては、観測データの二重位相差を観測量とし車両30の位置と整数値バイアスの2重位相差とを状態変数として、最小二乗法により、車両30の位置(典型的には、車両20に対する相対位置)が測位される。例えば、下記の手順で車両30の位置が測位されてもよい。以下では、説明の簡略化のため、位相積算値について、L1波のみを用いる場合を説明するが、L2波の位相積算値も用いる場合、L2波の位相積算値を、L1波の位相積算値と同様の態様で、追加すればよい。
【0039】
先ず、ペアリングされた2つのGPS衛星10j、10h(i=j、h、但し、j≠h)に関する位相積算値の2重位相差は、次式となる。
Φjhku=(Φjk(t)−Φju(t))−(Φhk(t)−Φhu(t)) 式(5)
一方、位相積算値の2重位相差Φjhkuは、(GPS衛星10iとGPS受信機22若しくは32との距離)=(搬送波の波長L)×(位相積算値)という物理的な意味合いから、次のようになる。
【0040】
【数1】
ここで、式(6)における[Xk(t)、Yk(t)、Zk(t)]は、時刻tにおける基準局20のワールド座標系における座標値であり、[Xu(t)、Yu(t)、Zu(t)]は、時刻tにおける車両30の座標値(未知)であり、[Xj(t)、Yj(t)、Zj(t)]及び[Xh(t)、Yh(t)、Zh(t)]は、時刻tにおける各GPS衛星10j、10hの座標値である。Njhkuは、整数値バイアスの2重位相差である(即ち、Njhku=(Njk−Nju)−(Nhk−Nhu))。尚、時刻tは、例えばGPS時刻で同期が取られているものとする。
【0041】
また、時刻tにおける2つのGPS衛星10j、10h(i=j、h、但し、j≠h)に関する擬似距離の2重位相差は、次式となる。
ρjhku=(ρjk(t)−ρju(t))−(ρhk(t)−ρhu(t)) 式(7)
擬似距離の2重位相差ρjhkuは、次のように表せる。
【0042】
【数2】
ここで、式(8)における[Xk(t)、Yk(t)、Zk(t)]、[Xu(t)、Yu(t)、Zu(t)]、[Xj(t)、Yj(t)、Zj(t)]及び[Xh(t)、Yh(t)、Zh(t)]は、上記式(6)と同様である。また、時刻tは、例えばGPS時刻で同期が取られているものとする。
【0043】
観測量Zと状態変数ηの関係は、次の線形モデルで表現される。
Z=H・η+V 式(9)
ここで、Vは観測雑音を示す。ηは、状態変数を表わし、車両30の座標値(未知)及び整数値バイアスの2重位相差である。例えばペアリングされたGPS衛星10のペア(j、h)が(1,2)、(1,3)、(1,4)及び(1,5)の4組である場合、η=[Xu、Yu、Zu、N12ku、N13ku、N14ku、N15ku]Tである(Tは転置を表す)。式(9)の観測量Zは、位相積算値の2重位相差Φjhku(上記式(5)参照)及び擬似距離の2重位相差ρjhku(上記式(7)参照)である。例えば、ペアリングされたGPS衛星10のペア(j、h)が(1,2)、(1,3)、(1,4)及び(1,5)の4組である場合、Z=[Φ12ku、Φ13ku、Φ14ku、Φ15ku、ρ12ku、ρ13ku、ρ14ku、ρ15ku]Tである。上記式(9)の観測方程式は線形であるが、式(6)及び式(8)では、観測量Zは、状態変数Xu、Yu及びZuに関して非線形であるため、式(6)及び式(8)の各項が状態変数Xu、Yu及びZuのそれぞれで偏微分され、上記式(9)の観測行列Hが求められる。例えば、ペアリングされたGPS衛星10のペア(j、h)が(1,2)、(1,3)、(1,4)及び(1,5)の4組である場合、以下のように、観測行列Hは、以下の通りである。
【0044】
【数3】
ここで、数8のH1は、観測量Z1=[Φ12ku、Φ13ku、Φ14ku、Φ15ku]Tとした場合の観測行列であり、数8のH2は、観測量Z2=[ρ12ku、ρ13ku、ρ14ku、ρ15ku]Tとした場合の観測行列であり、観測行列Hは、2つの観測行列H1、H2が組み込まれた形となる。
【0045】
上記式(9)から、数3の観測行列Hを用いて最小二乗法で解くと、以下の通りηの実数解(フロート解)が得られる。
η=(HT・W・H)−1・HT・W・Z 式(10)
ここで、Wは、重み調整部42において重みが調整された重み行列であり、例えば、ペアリングされたGPS衛星10のペア(j、h)が(1,2)、(1,3)、(1,4)及び(1,5)の4組である場合、以下の通りである。
【0046】
【数4】
ここで、対角成分のw1、w2,w3、w4は、観測量Z1に関する重み付け係数であり、対角成分のwρ1、wρ2,wρ3、wρ4は、観測量Z2に関する重み付け係数であり、例えば、それぞれ、車車間RTKの主要な誤差成分Δjhを用いて設定されてもよい。例えば代表としてGPS衛星10のペア(1,2)に関して、w1=|1/Δ12|とされてよく、この場合、係数γ(例えばγは、1/200〜1/100の間の値)を用いて、wρ1=γ|1/Δ12|とされてよい。或いは、例えば代表としてGPS衛星10のペア(1,2)に関して、w1=(1/Δ12)2とされてよく、この場合、係数γ(例えばγは、1/200〜1/100の間の値)を用いて、wρ1=γ(1/Δ12)2とされてよい。尚、ここで、1より小さい係数γを設定して、wρ1を、w1よりも小さくするのは、C/Aデータの方がL1データ(又はL2データ)よりも精度が低いことを考慮したものである。
【0047】
整数解算出部46においては、実数解算出部44で算出された整数値バイアスの実数解(フロート解)に基づいて、整数値バイアスの整数解が算出される。例えば、実数解算出部44で算出された実数解に対して最も誤差の小さい整数解(即ち、波数)を第1候補として求め、次に誤差の小さい整数解を第2候補として求める。この手法としては、整数値バイアスの無相関化をはかり、整数解の探索空間を狭めて解を特定するLAMBDA法が使用されてよい。或いは、LAMBDA法に代えて、他の整数最小二乗法や簡易の四捨五入により整数解を導出してもよい。
【0048】
FIX判定部48においては、整数解算出部46で導出された整数解をFIX解とするか否かが判定される。即ち、整数解算出部46で導出された整数解の信頼性を判断し、信頼性が高い整数解が得られた場合には、当該整数解をFIXして、以後、当該整数解を用いたRTK測位により測位結果を出力していく。整数解の信頼性の判定方法は、多種多様であり、任意の適切な方法が使用されてもよい。例えば、レシオテストを適用して、整数解の信頼性が判定されてもよい。例えば、レシオテストの一例として、ペアリングされたGPS衛星10のペア(j、h)が(1,2)、(1,3)、(1,4)及び(1,5)の4組であり、それぞれ4つの整数値バイアスの実数解(n12、n13、n14、n15)、整数値バイアスの整数解の第1候補(N121、N131、N141、N151)及び第2候補(N122、N132、N142、N152)が算出される場合を想定する。このとき、レシオRは、以下に示すように、整数値バイアスの実数解と整数値バイアスの整数解の第1候補との間の距離(ノルム)と、整数値バイアスの実数解と整数値バイアスの整数解の第2候補との間の距離との間の比である。
R={(n12−N122)2+(n13−N132)2+(n14−N142)2+(n15−N152)2}/{(n12−N121)2+(n13−N131)2+(n14−N141)2+(n15−N151)2} 式(11)
レシオRは、一般的に、高い値であるほど整数値バイアスの整数解の第1候補の信頼度が高いことを表す。従って、適切な所定の閾値αを設定して、レシオRが所定の閾値αよりも大きい場合に、整数解の信頼性が高いと判定して、整数値バイアスの整数解の第1候補を採用することとしてよい。
【0049】
次に、観測データ誤差補正部40におけるペア決定処理について説明する。
【0050】
図4は、観測データ誤差補正部40におけるペア決定処理の一例を示すフローチャートである。
【0051】
ステップ400では、車両20(基準局)から供給される車両20の位置の測位結果に基づいて、車両20とGPS衛星10iの間の距離Dikが算出される。この際、距離Dikが算出されるGPS衛星10iは、現在車両20と車両30の双方で観測される共通のGPS衛星10iの全てであってよい。各GPS衛星10iの位置は、航法メッセージに含まれる衛星軌道情報や国際GPS機関(IGS)等の機関により提供される暦データを用いて算出されてもよい。
【0052】
ステップ402では、上記ステップ400で求めた各GPS衛星10iに係る距離Dikに基づいて、距離Dikが近いGPS衛星10i同士をペアとして決定する。これにより、車車間RTKの主要な誤差成分Δjh(=ε(1/Djk−1/Dhk))が小さくなるペアを決定することができ、この結果、このようにして決定されたペアを用いて測位される測位結果の精度が向上する。尚、本ステップ402で決定されるペアの数は、測位演算に必要な数以上であればよく、例えば4(固定値)であってもよいし、4以上の可変値であってもよく、後者の場合、例えば距離Dikの近似度合いに応じて可変されてもよい。
【0053】
ここで、車車間RTKの主要な誤差成分Δ(=ε(1/Djk−1/Dhk))は、上記数1や数2の式において、車両20の座標(Xk,Yk,Zk)まわりで展開して、主要な単独測位誤差成分を抽出したものである。具体的には、例えば数1の式において、Xkのみで考えると、数1の式をXkで偏微分すると、次の通りである。
【0054】
【数5】
分母の大きさ(車両20とGPS衛星10iの間の実距離)に対して、単独測位誤差は十分小さいので、分母のルートの付いた部分を、単独測位結果を用いて算出される距離Djk及びDhkで表し、数5の式の左辺をAと置くと、次のように表される。
【0055】
【数6】
他方、分子において、Xk方向の単独測位誤差をεとすると(即ち、単独測位で得られるXkは、真値Xkrに対して、Xkr=Xk+εであるとすると)、数6の式は、次の通りとなり、単独測位誤差成分Δjh(=ε(1/Djk−1/Dhk))が抽出される。
【0056】
【数7】
尚、ここでは、Xkのみで考えたが、Yk,Zkに関しても同様の表現で表されるΔjh(εのみが異なる)が抽出される。
【0057】
従って、図4に示す処理によれば、距離Dikが近いGPS衛星10i同士をペアとして用いて車車間RTKを行うので、車車間RTK特有の問題、即ち、基準局側の座標として正確に測量された座標(精度がmmオーダー)で無く単独測位で測位された座標(精度がmオーダー)が用いられることに起因した測位精度の悪化を防止することができる。即ち、図4に示す処理によれば、距離Dikが近いGPS衛星10i同士をペアとして用いて車車間RTKを行うことで、基準局側の座標が単独測位等の低精度の測位法で測位される場合でも、かかる影響を最小限に抑えて、精度の高い測位を実現することができる。
【0058】
次に、車両20(基準局)側の座標の算出方法の好ましい例について、図5を参照して説明する。
【0059】
図5は、本実施例の車車間RTKで使用される車両20側の座標の好ましい算出方法の一例を示すフローチャートである。図5の処理は、車両20側のGPS受信機22で実行される。
【0060】
ステップ500では、車両30側のRTK測位に用いられるGPS衛星10iのペアを特定するための情報を、車車間通信器24,24間の通信を介して車両30側から取得する。即ち、上述の図4で示すような処理により決定されたGPS衛星10iのペアを特定するための情報を取得する。
【0061】
ステップ502では、RTK測位に用いられるGPS衛星10iのペアを構成するGPS衛星10iのみを用いて、単独測位により車両20の位置を測位する。例えば、車両30側のRTK測位に用いられるGPS衛星10iのペア(j、h)が(1,2)、(1,3)、(1,4)及び(1,5)の4組である場合、例え車両30にて他のGPS衛星10i(例えば、GPS衛星106)が観測可能であっても、5つのGPS衛星101,102,103,104,105のみのC/Aデータを用いて、単独測位により車両20の位置を測位する。
【0062】
ステップ504では、上記ステップ502で得られた単独測位結果(車両20の位置の座標)を観測データと共に、車車間通信器24,24間の通信を介して車両30側に送信する。
【0063】
このように図5に示す処理によれば、車両30側のRTK測位に用いられるGPS衛星10iのペアを構成するGPS衛星10iのみを用いて単独測位により車両20の位置を測位するので、当該測位結果を用いて車両30側でRTK測位する段階で、車両20の位置に含まれる単独測位誤差の影響が効率的に抑制され、精度の高い測位を実現することができる。
【0064】
尚、図5に示す処理は、車両30側のGPS受信機32で実行することも可能である。これは、車両30側のGPS受信機32がGPS受信機22から観測データ(C/Aデータ)を受信するので、車両30側のGPS受信機32によっても単独測位により車両20の位置を測位することができるからである。このような構成によれば、車両20と車両30間での通信量を低減することができる。
【0065】
図6は、上述の図4のペア決定処理後に実行されてよい観測データ誤差補正部40におけるペア再決定処理の一例を示すフローチャートである。
【0066】
ステップ600では、例えば上述の図4のペア決定処理に従って、測位演算に用いるGPS衛星10iの各ペアが決定される。各ペアが決定されると、上述の如く各部42,44,46,48における処理が決定されたペアを用いて実行される。尚、このとき、実数解算出部44において用いられる車両20の位置は、好ましくは、上述の図5の示す処理により得られた測位結果が用いられる。
【0067】
ステップ602では、FIX判定部48における判定結果に基づいて、上記ステップ600で決定されたペアを用いて得られた整数解がFIXしたか否かが判定される。整数解がFIXした場合には、上記ステップ600で決定されたペアが適切であったと判断して、そのまま終了する。他方、整数解がFIXしない場合には、ステップ604に進む。
【0068】
ステップ604では、誤差成分Δが小さくなるように、分母のDikの絶対値が大きい順にペアリングを行い、測位演算に用いるGPS衛星10iのペアを再決定する。例えば、ここで観測量間の線形独立性を確保するために基準衛星を用いる構成であれば、Dikの絶対値が最も大きいGPS衛星10iを基準衛星に設定し、Dikの絶対値が次に大きい4つのGPS衛星10iを選択し、当該選択した4つのGPS衛星10iのそれぞれを、基準衛星とペアリングして、4組のペアを決定してもよい。また、基準衛星を用いない構成であれば、Dikの絶対値が大きい4つ又は5つのGPS衛星10iを選択し、当該選択した4つ又は5つのGPS衛星10iから、4組のペアを決定してもよい。この際、図4に示した処理と同様の考え方で、当該選択した4つのGPS衛星10iから、Dikの近いGPS衛星10i同士をペアリングして、4組のペアを決定してもよい。
【0069】
このように図6に示す処理によれば、FIX判定部48において整数解がFIXしない場合でも、再度、誤差成分Δが小さくなるように測位演算に用いるGPS衛星10iのペアが再決定されるので、FIX判定部48において整数解がFIXせずに測位が行えない状況を適切に防止することができる。
【0070】
尚、図6に示す処理において、上記ステップ604で測位演算に用いるGPS衛星10iのペアが再決定された場合には、それに応じて、図5の処理が実行され、再決定されたペアを構成するGPS衛星10iのみを用いて、車両20の位置が単独測位されることとしてもよい。
【0071】
次に、観測データ誤差補正部40におけるペア決定処理のその他の例について幾つか説明する。以下で説明するペア決定処理のそれぞれは、例えば図4のペア決定処理に代えて実行されてもよいし、図6に示したペア再決定処理(ステップ604)で使用されてもよい。
【0072】
図7は、観測データ誤差補正部40におけるペア決定処理のその他の例を示すフローチャートである。
【0073】
ステップ700では、今回の測位周期で用いる予定の各ペアに関して、Δがそれぞれ算出される。今回の測位周期で用いる予定の各ペアは、前回の測位周期で用いた各ペアと同一であってもよいし、その他の方法で決定されてもよいし、或いは、ランダムに決定されてもよい。
【0074】
ステップ702では、上記ステップ700で算出された各Δのうち、絶対値が所定の閾値βよりも大きいΔが存在するか否かが判定される。所定の閾値βは、FIX判定部48において整数解がFIXしないような誤差成分Δに対応し、試験や解析結果等を用いて適合されてよい。絶対値が所定の閾値βよりも大きいΔが存在する場合には、ステップ704に進み、絶対値が所定の閾値βよりも大きいΔが存在しない場合には、ステップ706に進む。
【0075】
ステップ704では、今回の測位周期で用いる予定の各ペアが適切で無いと判断して、今回の測位周期で用いる予定の各ペアを変更する。このとき、各ペアを全て変更してもよいし、或いは、例えば絶対値が所定の閾値βよりも大きいΔとなるペアだけ、他の新たなペアに置き換えることとしてもよい。他の新たなペアは、図4で示したような方法で決定されてもよいし、その他の方法で決定されてもよいし、或いは、ランダムに決定されてもよい。
【0076】
ステップ706では、今回の測位周期で用いる予定の各ペアが適切であると判断して、今回の測位周期で用いる予定の各ペアを、今回の測位周期で用いるペアとして決定(確定)する。
【0077】
この図7に示す処理によれば、観測データ誤差補正部40において誤差成分Δが所定の閾値βを超えるようなペアを排除することができるので、後段の各部44,46において精度の高い測位を実現することができる。
【0078】
図8は、観測データ誤差補正部40におけるペア決定処理のその他の例を示すフローチャートである。
【0079】
ステップ800では、現在車両20と車両30の双方で観測される共通のGPS衛星10iを用いて、取りうる全通りのペアに関して、Δがそれぞれ算出される。例えば、現在車両20と車両30の双方で観測される共通のGPS衛星10iがN個ある場合、NC2通り(Cはコンビネーション)の数のペアに関して、Δがそれぞれ算出される。
【0080】
ステップ802では、上記ステップ800で算出された各Δに基づいて、Δの絶対値が小さいものから順に所定数のペアを、今回の測位周期で用いるペアとして決定する。所定数は、測位に用いるペアの数であり、例えば4以上の固定値であってもよいし、4以上の可変値であってもよい。
【0081】
この図8に示す処理によれば、観測データ誤差補正部40において最小のΔとなるペアを決定することができるので、後段の各部44,46において精度の高い測位を実現することができる。
【0082】
尚、図8に示す処理は、例えば図7に示した処理と組み合わせて実現することも可能である。例えば、初回の測位周期では図8に示す処理により測位に用いるペアを決定し、その後の測位周期では、図7に示す処理により測位に用いるペアを決定してもよい。この場合、図7に示す処理のステップ700では前回周期の各ペア(即ち、図8の処理で決定したペア)が、今回の測位周期で用いる予定の各ペアとして決定されてよく、また、ステップ704でペアを変更する場合は、図8に示す処理により、測位に用いるペアが再決定されてよい。
【0083】
図9は、観測データ誤差補正部40におけるペア決定処理のその他の例を示すフローチャートである。
【0084】
ステップ900では、現在車両20と車両30の双方で観測される共通のGPS衛星10iのうちの、特定のGPS衛星10iを基準衛星候補としたときに、当該基準衛星候補に対して取りうる全通りのペアに関して、Δがそれぞれ算出される。例えば、現在車両20と車両30の双方で観測される共通のGPS衛星10iがN個ある場合、(N−1)通りのペアに関して、Δがそれぞれ算出される。
【0085】
ステップ902では、現在車両20と車両30の双方で観測される共通のGPS衛星10iの全てについて、それぞれが基準衛星候補となったか否かが判定される。肯定判定の場合、ステップ906に進み、否定判定の場合には、ステップ904に進む。
【0086】
ステップ904では、基準衛星候補を変更して、ステップ900に戻る。このようにして、現在車両20と車両30の双方で観測される共通のGPS衛星10iの全てについて、それぞれを基準衛星候補としたときに、当該基準衛星候補に対して取りうる全通りのペアに関して、Δがそれぞれ算出される。
【0087】
ステップ906では、上記ステップ900の算出結果に基づいて、基準衛星候補毎に、Δの絶対値が小さいものから順に所定数のペアを抽出し、当該抽出した所定数のペアのΔの絶対値の合計値(合算値)を導出し、当該合計値が最も小さい基準衛星候補を、基準衛星として決定(確定)する。所定数は、測位に用いるペアの数であり、例えば4以上の固定値であってもよいし、4以上の可変値であってもよい(但し、基準衛星候補間では共通の数を用いる)。
【0088】
この図8に示す処理によれば、観測データ誤差補正部40において基準衛星を用いるペアリング方法で最小のΔとなるペアを決定することができるので、後段の各部44,46において精度の高い測位を実現することができる。また、基準衛星を用いるペアリング方法で最小のΔとなるペアを決定するので、最も適切な基準衛星を設定して、精度の高い測位を実現することができる。
【0089】
尚、図9に示す処理は、例えば図7に示した処理と組み合わせて実現することも可能である。例えば、初回の測位周期では図9に示す処理により測位に用いるペアを決定し、その後の測位周期では、図7に示す処理により測位に用いるペアを決定してもよい。この場合、図7に示す処理のステップ700では前回周期の各ペア(即ち、図9の処理で決定したペア)が、今回の測位周期で用いる予定の各ペアとして決定されてよく、また、ステップ704でペアを変更する場合は、図9に示す処理により、測位に用いるペアが再決定されてよい。
【0090】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形及び置換を加えることができる。
【0091】
例えば、上述した実施例では、Δが反映された重みを持つ重み行列Wを用いて、重みつきの最小二乗法により実数解が求められているが、重み行列Wを用いずに(即ち重み行列Wを単位行列として)、通常の最小二乗法により実数解を求めてもよい。これは、上述の如くΔが小さくなるようなペアが決定されている場合には重み行列Wを用いなくても、誤差要因Δの影響が抑制され、精度の高い測位結果が期待できるからである。また、逆の発想から、Δが反映された重みを持つ重み行列Wを用いる場合には、上述の如くΔが小さくなるようなペアの決定方法が用いられなくてもよい。即ち、Δが反映された重みを持つ重み行列Wを用いる場合には、ランダムな決定方法(若しくは他の観点からの決定方法)により測位に用いるペアが決定されてもよい。但し、この場合も、好ましくは、Δが所定閾値βよりも大きくなるペアについては、別のペアに変更される。また、重み行列Wの重みは、他のパラメータ(例えば仰角やDOP)にも依存して決定されてもよい。
【0092】
また、上述した実施例では、好ましい実施例として、瞬時測位法により整数値バイアスの実数解を求めているが、整数値バイアスの実数解の算出方法は、多種多様であり、上述の方法以外の他の方法が採用されてもよい。例えば、擬似距離の2重位相差ρjhkuを用いずに、位相積算値の2重位相差Φjhkuだけを用いる方法も可能である。また、GPS受信機22、32が、GPS衛星10から発射されるL1波及びL2波(周波数:1227.6MHz)の双方を受信可能な2周波受信機である場合には、L2波に対する位相積算値の2重位相差Φjhkuが追加的若しくは代替的に観測量Zとして用いられてよい。また、他の帯域の搬送波(例えば、今後追加が予定されているL5帯の電波)に対する位相積算値の2重位相差Φjhkuが追加的若しくは代替的に観測量Zとして用いられてよい。同様に、擬似距離の2重位相差ρjhkuについても、C/Aコード以外の同様のPRNコード(擬似雑音符号)(例えば、Pコード等)に基づく擬似距離の1重又は2重位相差ρjhkuが、追加的若しくは代替的に観測量Zとして用いられてよい。上述した整数値バイアスの実数解の算出方法では、上述の如く2重位相差を取ることでGPS受信機22,32内での発振器の初期位相、及び、時計誤差等の影響を消去しているが、一重位相差を取る構成であってもよい。また、上述の方法では、電離層屈折効果、対流圏屈折効果及びマルチパスの影響を無視しているが、これらを考慮するものであってもよい。また、その他の例として、最小二乗法に代えて、カルマンフィルタを用いてもよい。この場合、前回エポックでの推定(測位)結果が今回エポックの推定結果に影響を及ぼさないように、状態変数や誤差共分散行列の初期化をエポック毎に行う瞬時測位を実現してもよいし、状態変数や誤差共分散行列の初期化を行うことなく、通常的なカルマンフィルタの適用によりエポック毎に状態変数や誤差共分散行列を更新(引継ぎ)することとしてもよい。また、車両30の移動に起因した車両特有の動的状態量を考慮するため、車両30に搭載される車両センサ(車速センサや加速度センサ等)に基づく車両の移動速度等の動的状態量を既知入力として、カルマンフィルタに導入してもよい。また、車両30の移動履歴から該車両30の現時刻の状態を予測する移動体モデルをカルマンフィルタに導入してもよい。この場合、移動体モデルは、位置、速度、加速度、加加速度(加速度の微分値)のような車両30の移動状態を表すことができる任意のパラメータを用いて構成されてよい。例えば、車両30の速度vを一次のマルコフ過程と仮定して移動体モデルを構成して、カルマンフィルタに導入してもよい。
【0093】
また、上述した実施例において、車両20側で実行されていた各種処理の一部が、車両30側で実行されてもよく、逆に、車両30側で実行されていた各種処理の一部が、車両20側で実行されてもよい。例えば、車両30側で観測される観測データが車両30側から車両20側に供給され、車両20側で測位処理が実行されてもよい。この場合、測位結果が車車間通信により車両20側から車両30側に供給される。また、車両20の位置の測位(単独測位)は、車両30側で実行されてもよい。
【0094】
また、上述した実施例では、2台の車両20,30間での車車間RTKに関するものであったが、本発明は、3台以上の移動体が存在する状況にも適用可能である。3台以上の移動体が存在する状況では、それぞれの移動体のペア同士で独立して同様の車車間RTKを実行してもよいし、3台以上の移動体で協動して車車間RTKを行ってもよい。後者の場合、例えば車両20,30に加えて、第3の車両が存在する場合、車両20が車両30及び第3の車両の双方に対して基準局として機能してもよい。
【0095】
また、上述した実施例では、2台の車両20,30間での車車間RTKに関するものであったが、車両20,30との間で通信可能な第3の移動体(例えば車両)又は固定局が存在し、第3の移動体又は固定局が、車両20側で実行されていた各種処理、及び/又は、車両30側で実行されていた各種処理を実行してもよい。例えば、第3の移動体又は固定局が、車両20,30の双方から観測データを取得して、車両30側の各部40,42,44,46,48の機能を実行してもよい。この場合、第3の移動体又は固定局で得られた測位結果が、第3の移動体又は固定局から無線通信により車両20及び/又は30に供給されることとしてもよい。
【0096】
また、上述の実施例では、GPSに本発明が適用された例を示したが、本発明は、GPS以外の衛星システム、例えばガリレオ等の他のGNSS (Global Navigation Satellite System)にも適用可能である。
【図面の簡単な説明】
【0097】
【図1】移動体間干渉測位装置が適用されるGPSの全体的な構成を示すシステム構成図である。
【図2】車両20と車両30の主要構成を示す図である。
【図3】本実施例の車両20,30においてそれぞれ実行される主要処理を示すブロック図である。
【図4】観測データ誤差補正部40におけるペア決定処理の一例を示すフローチャートである。
【図5】本実施例の車車間RTKで使用される車両20側の座標の好ましい算出方法の一例を示すフローチャートである。
【図6】図4のペア決定処理後に実行されてよい観測データ誤差補正部40におけるペア再決定処理の一例を示すフローチャートである。
【図7】観測データ誤差補正部40におけるペア決定処理のその他の例を示すフローチャートである。
【図8】観測データ誤差補正部40におけるペア決定処理のその他の例を示すフローチャートである。
【図9】観測データ誤差補正部40におけるペア決定処理のその他の例を示すフローチャートである。
【符号の説明】
【0098】
10 GPS衛星
20 車両(基準局)
22 基準局側GPS受信機
24 基準局側車車間通信機
30 車両
32 車両側GPS受信機
34 車両側車車間通信機
40 観測データ誤差補正部
42 重み調整部
44 実数解算出部
46 整数解算出部
48 FIX判定部
【特許請求の範囲】
【請求項1】
第1移動体で観測される観測データであって、衛星電波の搬送波の位相積算値に関する観測データを取得する第1観測データ取得手段と、
第2移動体で観測される観測データであって、衛星電波の搬送波の位相積算値に関する観測データを取得する第2観測データ取得手段と、
干渉測位に用いる衛星のペアを決定する衛星ペア決定手段と、
前記衛星ペア決定手段により決定されたペアの衛星間で、前記第1観測データ取得手段で取得された観測データと、前記第2観測データ取得手段で取得された観測データの一重位相差若しくは二重位相差を取り、該一重位相差若しくは二重位相差を取った観測データを用いて、干渉測位により前記第1移動体と前記第2移動体の間の相対位置関係を特定する干渉測位手段とを備えることを特徴とする、移動体間干渉測位装置。
【請求項2】
前記第1観測データ取得手段で取得された観測データ、及び、前記第2観測データ取得手段で取得された観測データは、共に、共通の衛星に関する搬送波の位相積算値の計測データと、共通の衛星に関する擬似距離の計測データとを含み、
前記相対位置関係は、前記観測データをエポック毎に独立して用いる瞬時測位法により特定される、請求項1に記載の移動体間干渉測位装置。
【請求項3】
前記衛星ペア決定手段により決定されたペアの衛星間における前記第1移動体までの距離の逆数の差に基づいて、各ペア間の前記一重位相差若しくは二重位相差を取った観測データが測位結果に与える影響を、重み付けにより調整する、請求項1又は2に記載の移動体間干渉測位装置。
【請求項4】
前記干渉測位手段は、前記一重位相差若しくは二重位相差を取った観測データと共に、単独測位により導出された前記第1移動体の位置情報を用いて、前記相対位置関係を特定し、
前記単独測位により導出された前記第1移動体の位置情報は、前記衛星ペア決定手段により決定された各ペアを構成する衛星のみを用いた単独測位により導出される、請求項1又は2に記載の移動体間干渉測位装置。
【請求項5】
前記衛星ペア決定手段は、前記第1移動体と各衛星との間の距離に基づいて、前記衛星のペアを決定する、請求項1又は2に記載の移動体間干渉測位装置。
【請求項6】
前記衛星ペア決定手段は、前記第1移動体までの距離の差が小さい2つの衛星同士を前記ペアとして決定する、請求項5に記載の移動体間干渉測位装置。
【請求項7】
前記衛星ペア決定手段は、前記第1移動体までの距離の逆数の差が小さい2つの衛星同士を前記ペアとして決定する、請求項5に記載の移動体間干渉測位装置。
【請求項8】
前記衛星ペア決定手段は、前記第1移動体までの距離が大きい衛星を優先して前記ペアを構成させる、請求項5に記載の移動体間干渉測位装置。
【請求項9】
前記衛星ペア決定手段は、あるペアの衛星間における前記第1移動体までの距離の逆数の差が所定閾値を超えて大きくなった場合、該ペアに代えて、他のペアを決定する、請求項5に記載の移動体間干渉測位装置。
【請求項10】
前記衛星ペア決定手段は、前記干渉測位手段で導出される整数解がFIXしない場合に、前記第1移動体までの距離が大きい衛星を優先して用いて、前記ペアを再決定する、請求項5に記載の移動体間干渉測位装置。
【請求項11】
前記第2移動体に搭載される請求項1〜10のうちのいずれか1項に記載の移動体間干渉測位装置であって、
前記第1観測データ取得手段は、前記第1移動体との無線通信により、前記観測データを取得し、
前記第2観測データ取得手段は、衛星電波を観測して前記観測データを取得する、移動体間干渉測位装置。
【請求項12】
第1移動体で観測された衛星電波の観測データを取得する第1観測データ取得段階と、
第2移動体で観測された衛星電波の観測データを取得する第2観測データ取得段階と
前記第1移動体と各衛星との間の距離に基づいて、該距離が近い衛星同士がペアを構成するように、干渉測位に用いる衛星のペアを決定する衛星ペア決定段階と、
前記衛星ペア決定段階で決定されたペアの衛星間で、前記第1観測データ取得段階で取得された観測データと、前記第2観測データ取得段階で取得された観測データの一重位相差若しくは二重位相差を取り、該一重位相差若しくは二重位相差を取った観測データを用いて、干渉測位により前記第1移動体と第2移動体の間の相対位置関係を特定する干渉測位段階とを備えることを特徴とする、移動体間干渉測位方法。
【請求項1】
第1移動体で観測される観測データであって、衛星電波の搬送波の位相積算値に関する観測データを取得する第1観測データ取得手段と、
第2移動体で観測される観測データであって、衛星電波の搬送波の位相積算値に関する観測データを取得する第2観測データ取得手段と、
干渉測位に用いる衛星のペアを決定する衛星ペア決定手段と、
前記衛星ペア決定手段により決定されたペアの衛星間で、前記第1観測データ取得手段で取得された観測データと、前記第2観測データ取得手段で取得された観測データの一重位相差若しくは二重位相差を取り、該一重位相差若しくは二重位相差を取った観測データを用いて、干渉測位により前記第1移動体と前記第2移動体の間の相対位置関係を特定する干渉測位手段とを備えることを特徴とする、移動体間干渉測位装置。
【請求項2】
前記第1観測データ取得手段で取得された観測データ、及び、前記第2観測データ取得手段で取得された観測データは、共に、共通の衛星に関する搬送波の位相積算値の計測データと、共通の衛星に関する擬似距離の計測データとを含み、
前記相対位置関係は、前記観測データをエポック毎に独立して用いる瞬時測位法により特定される、請求項1に記載の移動体間干渉測位装置。
【請求項3】
前記衛星ペア決定手段により決定されたペアの衛星間における前記第1移動体までの距離の逆数の差に基づいて、各ペア間の前記一重位相差若しくは二重位相差を取った観測データが測位結果に与える影響を、重み付けにより調整する、請求項1又は2に記載の移動体間干渉測位装置。
【請求項4】
前記干渉測位手段は、前記一重位相差若しくは二重位相差を取った観測データと共に、単独測位により導出された前記第1移動体の位置情報を用いて、前記相対位置関係を特定し、
前記単独測位により導出された前記第1移動体の位置情報は、前記衛星ペア決定手段により決定された各ペアを構成する衛星のみを用いた単独測位により導出される、請求項1又は2に記載の移動体間干渉測位装置。
【請求項5】
前記衛星ペア決定手段は、前記第1移動体と各衛星との間の距離に基づいて、前記衛星のペアを決定する、請求項1又は2に記載の移動体間干渉測位装置。
【請求項6】
前記衛星ペア決定手段は、前記第1移動体までの距離の差が小さい2つの衛星同士を前記ペアとして決定する、請求項5に記載の移動体間干渉測位装置。
【請求項7】
前記衛星ペア決定手段は、前記第1移動体までの距離の逆数の差が小さい2つの衛星同士を前記ペアとして決定する、請求項5に記載の移動体間干渉測位装置。
【請求項8】
前記衛星ペア決定手段は、前記第1移動体までの距離が大きい衛星を優先して前記ペアを構成させる、請求項5に記載の移動体間干渉測位装置。
【請求項9】
前記衛星ペア決定手段は、あるペアの衛星間における前記第1移動体までの距離の逆数の差が所定閾値を超えて大きくなった場合、該ペアに代えて、他のペアを決定する、請求項5に記載の移動体間干渉測位装置。
【請求項10】
前記衛星ペア決定手段は、前記干渉測位手段で導出される整数解がFIXしない場合に、前記第1移動体までの距離が大きい衛星を優先して用いて、前記ペアを再決定する、請求項5に記載の移動体間干渉測位装置。
【請求項11】
前記第2移動体に搭載される請求項1〜10のうちのいずれか1項に記載の移動体間干渉測位装置であって、
前記第1観測データ取得手段は、前記第1移動体との無線通信により、前記観測データを取得し、
前記第2観測データ取得手段は、衛星電波を観測して前記観測データを取得する、移動体間干渉測位装置。
【請求項12】
第1移動体で観測された衛星電波の観測データを取得する第1観測データ取得段階と、
第2移動体で観測された衛星電波の観測データを取得する第2観測データ取得段階と
前記第1移動体と各衛星との間の距離に基づいて、該距離が近い衛星同士がペアを構成するように、干渉測位に用いる衛星のペアを決定する衛星ペア決定段階と、
前記衛星ペア決定段階で決定されたペアの衛星間で、前記第1観測データ取得段階で取得された観測データと、前記第2観測データ取得段階で取得された観測データの一重位相差若しくは二重位相差を取り、該一重位相差若しくは二重位相差を取った観測データを用いて、干渉測位により前記第1移動体と第2移動体の間の相対位置関係を特定する干渉測位段階とを備えることを特徴とする、移動体間干渉測位方法。
【図1】

【図2】
【図3】

【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−270927(P2009−270927A)
【公開日】平成21年11月19日(2009.11.19)
【国際特許分類】
【出願番号】特願2008−121477(P2008−121477)
【出願日】平成20年5月7日(2008.5.7)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成21年11月19日(2009.11.19)
【国際特許分類】
【出願日】平成20年5月7日(2008.5.7)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]