
移動体
【課題】簡単な構造を備えるだけで、本体を大きく傾斜させることなく、段差を昇降することができる移動体を提供する。
【解決手段】軸3は、本体1に対して回転可能に連結され本体1を支持する。モータは、軸3を回転駆動する。プーリ4は、軸3に固定されている。軸7は、ホイール2を回転させる。プーリ6は、軸7に固定されプーリ4よりも半径が大きい。ベルト5は、プーリ4と、プーリ6とを連結する。アーム8は、プーリ4と、プーリ6とをベルト5と並行して連結し、ホイール2の半径よりも短い。
【解決手段】軸3は、本体1に対して回転可能に連結され本体1を支持する。モータは、軸3を回転駆動する。プーリ4は、軸3に固定されている。軸7は、ホイール2を回転させる。プーリ6は、軸7に固定されプーリ4よりも半径が大きい。ベルト5は、プーリ4と、プーリ6とを連結する。アーム8は、プーリ4と、プーリ6とをベルト5と並行して連結し、ホイール2の半径よりも短い。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車輪走行により移動する移動体に関する。
【背景技術】
【0002】
従来より、車輪走行により移動する移動体として、倒立振子型のロボットが知られている。倒立振子とは、棒を垂直に立たせる振子のことである。倒立振子では、支点を移動させることにより、その姿勢を安定化させている。
【0003】
倒立振子型のロボットは、形状が縦型であるため狭い空間も通り抜けられるうえ、機械的構造や制御系が単純であることから、人間の生活環境で活躍するロボットとして注目されている。
【0004】
倒立振子型のロボットが苦手としているのが段差である。倒立振子型のロボットでは、段差により一時的に回転が停止した車輪を上段に上げるためには、本体を大きく傾ける必要があるため、転倒の可能性が大きくなる。
【0005】
そこで、転倒せずに倒立振子型のロボットで段差を移動できるものとして、脚に車輪を取り付けたロボットや、特殊車輪を用いているロボットが提案されている(例えば、非特許文献1、2参照)。また、段差に強い段差走行公転車輪なども提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−210577号公報
【非特許文献】
【0007】
【非特許文献1】松本 治:脚車輪型ロボットの動的段差・階段昇降に関する研究、機械技術研究所報告,No.181,1999
【非特許文献2】高木 健、稲垣 詠一:特殊車輪を有する倒立振子型ロボットの段差・斜面の走行制御、日本機械学会ロボティックス・メカトロニクス講演会’02講演論文集、2P2−E02,2002
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、これまでに開示された、段差を移動できる移動体は、構造が複雑であり、これにより、車体が重くなるなどの不都合があった。
【0009】
本発明は、上記実情に鑑みてなされたものであり、簡単な構造を備えるだけで、本体を大きく傾斜させることなく、段差を昇降することができる移動体を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明の移動体は、
本体と、
前記本体に回転可能に連結され前記本体を支持する第1の回転軸と、
前記第1の回転軸を回転駆動するモータと、
前記第1の回転軸に固定された第1のプーリと、
車輪と、
前記車輪を回転させる第2の回転軸と、
前記第2の回転軸に固定され前記第1のプーリよりも半径が大きい第2のプーリと、
前記第1のプーリと、前記第2のプーリとを連結するベルトと、
前記第1のプーリと、前記第2のプーリとを前記ベルトと並行して連結する前記車輪の半径よりも短いアームと、
を備える。
【0011】
この場合、前記本体の重心位置を検出する検出部と、
前記検出部によって検出された前記重心が前記車輪の地面への接触点の鉛直線上に位置するように、前記モータの出力トルクを制御する制御部と、
をさらに備える、
こととしてもよい。
【0012】
この場合、前記検出部は、
前記車輪の回転角度及び角速度と、前記本体の回転角度及び角速度と、前記アームの回転角度及び角速度と、を検出し、
前記制御部は、
前記検出部の各検出結果を入力とし、前記モータの出力トルクを出力とする関係式を用いて、前記モータの出力トルクを決定する、
こととしてもよい。
【0013】
また、前記第1の回転軸、前記モータ、前記第1のプーリ、前記車輪、前記第2の回転軸、前記第2のプーリ、前記ベルト、前記アームとが、複数組設けられている、
こととしてもよい。
【発明の効果】
【0014】
本発明によれば、2つのプーリ、ベルト、アームを備える伝達機構のような簡単な構造を備えるだけで、段差により車輪が一時的に停止したとしても、本体の姿勢を垂直に保ったままで、本体の重心を自動的に段差の鉛直線上に移動させることができるので、本体を大きく傾斜させることなく、段差を昇降することができる。
【図面の簡単な説明】
【0015】
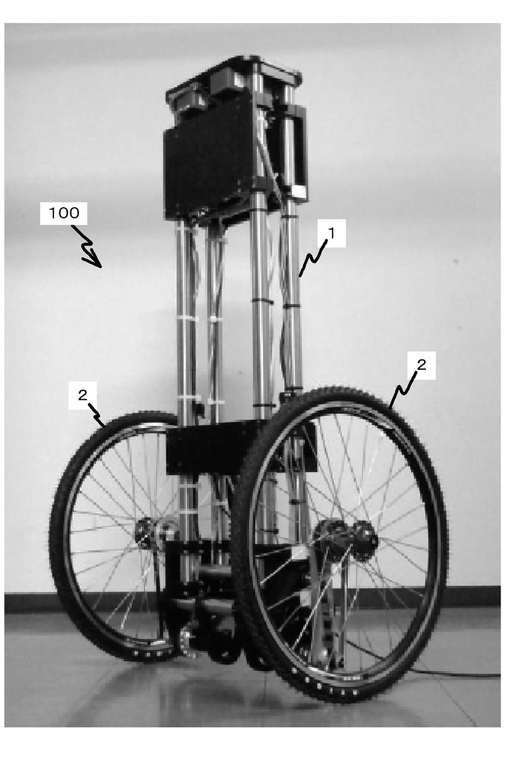
【図1】本発明の実施形態に係るロボットの概略的な構成を示す斜視図である。
【図2】図1のロボットのホイール付近の拡大斜視図である。
【図3】伝達機構に生ずる力を説明するための模式図である。
【図4】制御系のブロック図である。
【図5】姿勢制御に用いられる入力情報及び出力情報を説明するための模式図である。
【図6】図6(A)乃至図6(D)は、ロボットが段差を乗り越える様子を示す図である。
【図7】図7(A)は、ロボットが平地を移動しているときの伝達機構の動きを説明するための図である。図7(B)は、このときに発生している力やトルクを説明するための図である。
【図8】図8(A)は、ロボットが段差に接触したときの伝達機構の動きを説明するための図である。図8(B)は、このときに発生している力やトルクを説明するための図である。
【発明を実施するための形態】
【0016】
本発明の実施の形態について、図面を参照して詳細に説明する。
【0017】
図1には、本実施の形態に係るロボット100の全体の斜視図が示されている。図1に示すように、ロボット100は、本体1と、2つの車輪(ホイール)2とを備える。ロボット100では、本体1の下部に2つのホイール2が、進行方向に直交する方向に略平行に配置されている。
【0018】
ロボット100は、2つのホイール2を用いた2輪走行により、前後に移動可能な倒立振子型のロボットである。すなわち、ロボット100は、いわゆる倒立平行二輪車である。
【0019】
ロボット100の高さは、例えば1.15mであり、全質量は例えば16.2kgである。本体1は、縦長であり、ロボット100の高さは、本体1の高さにほぼ等しい。ホイール2のタイヤとしては、例えば、20×1.1/8inchのものが用いられている。
【0020】
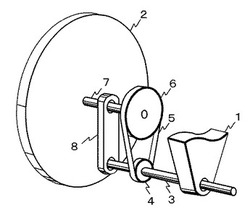
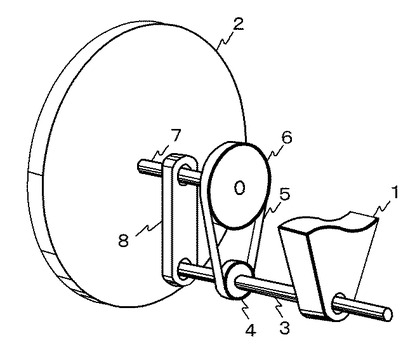
図2には、ロボット100のホイール2付近の拡大斜視図が示されている。図2に示すように、ロボット100は、本体1、ホイール2のほか、軸3と、プーリ4と、ベルト5と、プーリ6と、軸7と、アーム8と、を備える。
【0021】
本体1は、第1の回転軸としての軸3と連結されている。軸3は、本体1に対して不図示のベアリングを介して回転可能に連結されている。
【0022】
軸3は、モータ11(図2では不図示、図4参照)の駆動軸である。モータ11としては、例えば出力120Wのブラシレスモータを採用することができる。モータ11を駆動するための電力は、例えば2つの6セルのリチウムポリマー電池から供給されている。
【0023】
モータ11の回転により、軸3は、本体1に対して回転する。モータ11の出力は減速比50のハーモニックドライブにより減速されて軸3に入力される。また、軸3は、本体1を直接的に支持する。軸3から本体1の重心までの距離は、例えば0.547mである。
【0024】
軸3には、第1のプーリとしてのプーリ4が固定されている。プーリ4は、ベルト5を介して第2のプーリとしてのプーリ6と連結されている。プーリ4からプーリ6へはベルト5によって動力が伝達される。
【0025】
プーリ6としては、プーリ4よりも半径が大きいものが選ばれている。プーリ4とプーリ6には、タイミングプーリを用いており、ベルト5は、タイミングベルトである。プーリ4、6の歯数は、例えば24と72であり、プーリ比は、1:3となっている。
【0026】
プーリ6は第2の回転軸としての軸7の端部に固定されている。軸7はホイール2を回転させる回転軸である。
【0027】
さらに、軸7は、アーム8を介して軸3と連結されている。アーム8は、ベルト5と平行に、不図示のベアリングを介して軸3、7と連結されている。これにより、軸3と軸7とは、アーム8に対して自由に回転することができるうえ、アーム8により軸3と軸7との間は、一定の間隔に保たれている。その間隔、すなわちアーム8の軸間距離は、例えば0.197mである。
【0028】
なお、プーリ4、6のプーリ比やアーム8の長さは、プーリ4を所定角度だけ回転した場合に、アーム8を固定しホイール2を回転させたときの本体1の重心の移動量と、ホイール2やプーリ6を固定しアーム8を回転させたときの本体1の重心の移動量とがほぼ等しくなるように設定されている。
【0029】
図2に示される伝達機構は、いわば遊星車輪機構ともいうべきものである。すなわち、この伝達機構では、プーリ4の回転により、プーリ6が回転することが可能であるが、アーム8を例えば軸7を中心に回転させることにより、プーリ4をプーリ6の周りに回転(公転)させることも可能である。
【0030】
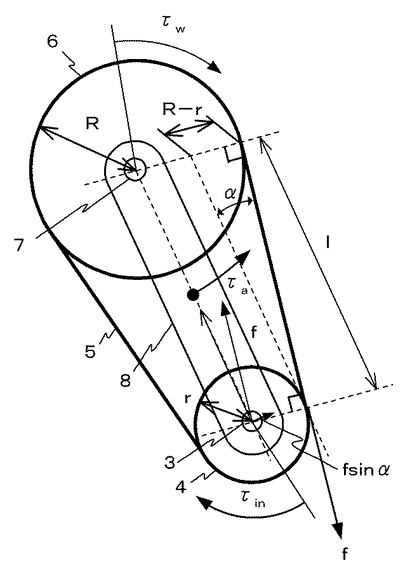
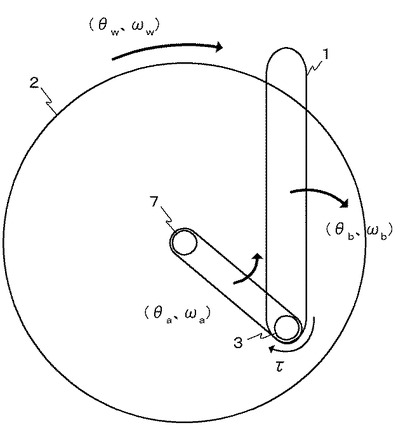
ここで、モータ11の回転トルクτinと、ホイール2を回転駆動するトルクτwと、アーム8に働くプーリ6の軸周りのトルクτaとの関係について考える。ここで、各トルク及び力の正負の向きについては、図3の矢印の向きを正として定義する。また、プーリ4の半径をrとし、プーリ6の半径をRとする。また、ベルトの張力をfとすると、トルクτwは、次式のようになる。
【0031】
【数1】

さらに、アーム8の軸間距離をlとし、アーム8とベルト5となす角度を図3に示すようにαと定義する。ベルト5の張力fの反力が軸3に働くため、アーム8の回転トルクτaは、次式のようになる。
【0032】
【数2】
sinαは、プーリ4、6の半径r、Rから次式のように定められる。
【0033】
【数3】
上記式(1)、式(2)、式(3)より、ホイール2の回転トルクτwとアーム8の回転トルクτaの関係は次式のようになる。
【0034】
【数4】
【0035】
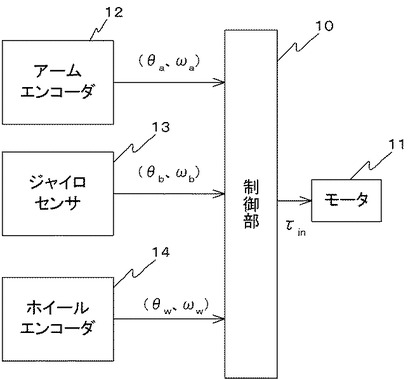
図4には、ロボット100の制御系が示されている。図4に示すように、この制御系は、ロボット100内部に組み込まれた制御部10を中心に構築されている。また、この制御系を構築すべく、ロボット100は、モータ11に加え、アームエンコーダ12と、ジャイロセンサ13と、ホイールエンコーダ14とをさらに備える。
【0036】
ロボット100は、倒立振子型であり、本体1の重心が、ホイール2の地面との接触点の鉛直線上に位置するような姿勢制御を行う必要がある。制御部10は、CPU及びメモリ(いずれも不図示)を有する。CPUがメモリに格納されたプログラムを実行することにより、制御部10は、上述の姿勢制御を行う。
【0037】
より具体的には、制御部10は、モータ11へのトルク指令τinを生成する。このトルク指令τinを生成するために、制御部10は、アームエンコーダ12、ジャイロセンサ13、ホイールエンコーダ14からそれぞれ出力される情報を入力し、入力した情報をトルク指令τinの算出に用いる。
【0038】
アームエンコーダ12は、アーム8における軸7との連結部分に組み込まれている。アームエンコーダ12は、図5に示すように、鉛直線を基準として、軸7周りのアーム8の回転角度θaと、回転角速度ωaとを検出して、制御部10に出力する。
【0039】
ジャイロセンサ13は、本体1に組み込まれている。ジャイロセンサ13は、図5に示すように、鉛直線を基準として、軸3周りの本体1の回転角度θbと、回転角速度ωbとを検出して、制御部10に出力する。
【0040】
ホイールエンコーダ14は、ホイール2に組み込まれている。ホイールエンコーダ14は、ホイール2の回転角度θwと、回転角速度ωwとを検出して、制御部10に出力する。
【0041】
制御部10は、以下の演算式に基づいて、モータ10の指令トルクτinを算出する。
【数5】
ここで、K1、K2、K3、K4、K5、K6は、制御パラメータである。上記式(5)に係る制御パラメータは、本体1の重心が、ホイール2の地面との接触点の鉛直線上の位置に制御されるように最適化されている。
【0042】
また、ロボット100を一定速度vで移動させようとする場合には、上記式(5)を次式のように変形し、変形された演算式を用いて制御を行う。
【数6】
ここで、tは、移動を開始してからの時間である。
【0043】
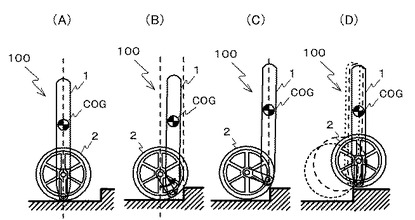
次に、本実施形態に係るロボット100の動作について説明する。図6(A)乃至図6(D)には、ロボット100が、平地を移動して段差を乗り越える様子が示されている。
【0044】
まず、ロボット100が、平地を例えば一定速度vで移動させる場合について説明する。図6(A)に示すように、ロボット100が平地を移動している場合、本体1の重心が一定速度vで移動するため、制御部10は、本体1の重心の移動に合わせて、ホイール2を回転させる必要がある。そこで、制御部10は、上記式(6)を用いて、モータ11の回転トルクτinを算出し、算出された回転トルクτinでモータ11を回転させる。
【0045】
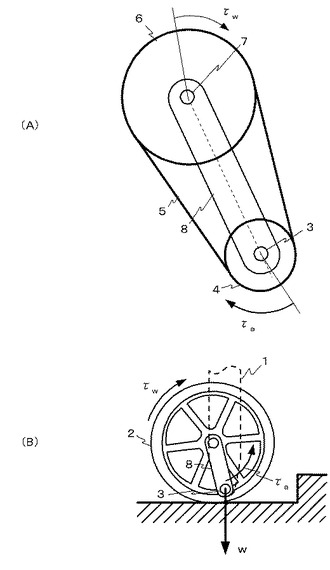
平地走行中は、ホイール2は、1点のみで地面と接触しているため、スムーズに回転可能となっている。このため、図7(A)に示すように、モータ11の回転にあわせて、プーリ6も回転する。
【0046】
このような状況では、急加速でもしない限り、ホイール2の回転トルクτwは、大きな値を取らない。この場合、上記式(4)より、アーム8の回転トルクτaも大きな値を取らない。また、軸3に働く力は、本体1の荷重wが支配的であると考えられるため、この状態では、図7(B)に示すように、アーム8の駆動により、本体1は持ち上がらない。
【0047】
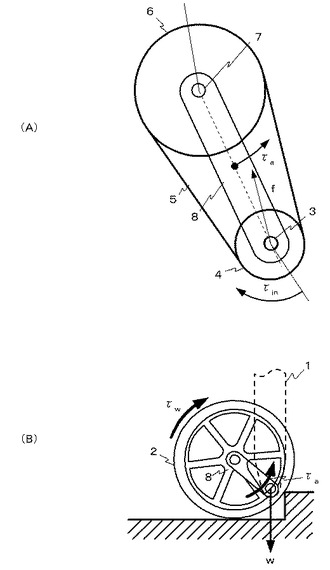
続いて、図6(B)に示すように、ロボット100のホイール2が、段差に接触すると、ホイール2と地面との接触点の数は2つとなる。この時点で、ホイール2の回転は、一旦停止する。これにより、図8(A)に示すように、プーリ6の回転も停止するので、モータ11の回転トルクτinによる張力fにより、軸7周りのアーム8の回転トルクτaが生まれる。この回転トルクτaにより、図8(B)に示すように、アーム8が、軸7を中心に半時計周りに回転し、本体1を持ち上げるとともに、本体1を傾斜させることなく、重心をさらに移動させる。
【0048】
その後、図6(C)に示すように、アーム8の持ち上げにより、本体1の重心位置が、段差の位置を越えると、本体1の荷重wにより、アーム8の軸7周りの回転が停止した後、今度は、軸3周りに回転して、ホイール2を段差の上に引き上げる。その後、ロボット100は、再び、図6(A)の状態と同じ状態に戻り、全体が右側に移動するようになる。
【0049】
本実施形態に係るロボット100は、上記式(6)を用いた制御部10の倒立振子制御により、転倒することなく、段差を降りることも可能である。
【0050】
なお、図2の遊星車輪機構では、アーム8は、軸7を中心に360度回転可能であるが、アーム8の回転角度を、例えば鉛直線を基準として前後90度以内に制限するストッパを設けるようにしてもよい。
【0051】
アーム8の回転を制限するストッパが設けられている場合には、アーム8がストッパに衝突した反動で、ホイール2が段差の下から上に浮きあがるようにしてもよい。
【0052】
本発明者は、実際に、ロボット100を試作し、4cmや8cmの段差の昇降を成功させた。
【0053】
以上詳細に説明したように、本実施形態によれば、2つのプーリ4、6、ベルト5、アーム8を備える伝達機構のような簡単な構造を備えるだけで、段差によりホイール2が一時的に停止したとしても、本体1の姿勢を垂直に保ったままで、本体1の重心を自動的に段差の鉛直線上に移動させることができるので、本体1を大きく傾斜させることなく、段差を昇降することができる。
【0054】
このロボット100によれば、段差を認識するための外界センサを備えることなく、かつ、事前に段差の情報を入力することなく、段差を乗り越えることができる。
【0055】
段差を乗り越えるために、ホイール2を駆動するアクチュエータとは別に、アーム8を駆動するための別のアクチュエータを用いる方法も考えられる。しかしながら、この方法では、2つものアクチュエータを用いる必要があり、機構が複雑になるのみならず、アームを制御するために段差を認識するためのセンサも追加する必要がある。これに対し、ロボット100では、そのようなアクチュエータを備えることなく、段差を昇降することができる。
【0056】
上記実施の形態では、ロボット100の車輪の数は2つであったが、本発明はこれには限られない。例えば、車輪の数は1つであってもよいし、3つ以上であってもよい。すなわち、本発明は、一輪車、三輪車、四輪車等、車輪で移動する移動体であれば、適用が可能である。
【0057】
また、上記実施の形態では、制御部10がロボット100内に設けられているものとしたが、制御部10は、ロボット100外にあってもよい。この場合、センサからの情報は、有線通信又は無線通信(例えばCAN通信)を介して、外部のコントローラへ送信され、コントローラから送信されるモータ11へのトルク指令も、有線通信又は無線通信により、モータ11のドライバ(不図示)へ送信されるようにする必要がある。
【0058】
また、本体1の構造には、本発明は限定されず、例えば、人間が乗れるようになっていてもよいし、人間が、車輪をペダルで漕ぐことができる自転車のようなものであってもよい。
【0059】
なお、上記実施の形態において、制御部10において実行される制御プログラムは、フレキシブルディスク、CD−ROM(Compact Disc Read-Only Memory)、DVD(Digital Versatile Disc)、MO(Magneto-Optical Disc)等のコンピュータ読み取り可能な記録媒体に格納して配布し、そのプログラムをインストールすることにより、上述のスレッドを実行するシステムを構成することとしてもよい。
【0060】
また、制御プログラムをインターネット等の通信ネットワーク上の所定のサーバ装置が有するディスク装置等に格納しておき、例えば、搬送波に重畳させて、ダウンロード等するようにしてもよい。
【0061】
また、上述の機能を、OS(Operating System)が分担して実現する場合又はOSとアプリケーションとの協働により実現する場合等には、OS以外の部分のみを媒体に格納して配布してもよく、また、ダウンロード等してもよい。
【0062】
本発明は、本発明の広義の精神と範囲を逸脱することなく、様々な実施の形態及び変形が可能とされるものである。また、上述した実施の形態は、本発明を説明するためのものであり、本発明の範囲を限定するものではない。すなわち、本発明の範囲は、実施の形態ではなく、特許請求の範囲によって示される。そして、特許請求の範囲内及びそれと同等の発明の意義の範囲内で施される様々な変形が、本発明の範囲内とみなされる。
【産業上の利用可能性】
【0063】
本発明は、倒立振子型のロボットに適用するのに好適である。特に、人間の生活環境で活躍するロボットに適用するのが望ましい。
【符号の説明】
【0064】
100 ロボット
1 本体
2 ホイール
3 軸
4 プーリ
5 ベルト
6 プーリ
7 軸
8 アーム
10 制御部
11 モータ
12 アームエンコーダ
13 ジャイロセンサ
14 ホイールエンコーダ
【技術分野】
【0001】
本発明は、車輪走行により移動する移動体に関する。
【背景技術】
【0002】
従来より、車輪走行により移動する移動体として、倒立振子型のロボットが知られている。倒立振子とは、棒を垂直に立たせる振子のことである。倒立振子では、支点を移動させることにより、その姿勢を安定化させている。
【0003】
倒立振子型のロボットは、形状が縦型であるため狭い空間も通り抜けられるうえ、機械的構造や制御系が単純であることから、人間の生活環境で活躍するロボットとして注目されている。
【0004】
倒立振子型のロボットが苦手としているのが段差である。倒立振子型のロボットでは、段差により一時的に回転が停止した車輪を上段に上げるためには、本体を大きく傾ける必要があるため、転倒の可能性が大きくなる。
【0005】
そこで、転倒せずに倒立振子型のロボットで段差を移動できるものとして、脚に車輪を取り付けたロボットや、特殊車輪を用いているロボットが提案されている(例えば、非特許文献1、2参照)。また、段差に強い段差走行公転車輪なども提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−210577号公報
【非特許文献】
【0007】
【非特許文献1】松本 治:脚車輪型ロボットの動的段差・階段昇降に関する研究、機械技術研究所報告,No.181,1999
【非特許文献2】高木 健、稲垣 詠一:特殊車輪を有する倒立振子型ロボットの段差・斜面の走行制御、日本機械学会ロボティックス・メカトロニクス講演会’02講演論文集、2P2−E02,2002
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、これまでに開示された、段差を移動できる移動体は、構造が複雑であり、これにより、車体が重くなるなどの不都合があった。
【0009】
本発明は、上記実情に鑑みてなされたものであり、簡単な構造を備えるだけで、本体を大きく傾斜させることなく、段差を昇降することができる移動体を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明の移動体は、
本体と、
前記本体に回転可能に連結され前記本体を支持する第1の回転軸と、
前記第1の回転軸を回転駆動するモータと、
前記第1の回転軸に固定された第1のプーリと、
車輪と、
前記車輪を回転させる第2の回転軸と、
前記第2の回転軸に固定され前記第1のプーリよりも半径が大きい第2のプーリと、
前記第1のプーリと、前記第2のプーリとを連結するベルトと、
前記第1のプーリと、前記第2のプーリとを前記ベルトと並行して連結する前記車輪の半径よりも短いアームと、
を備える。
【0011】
この場合、前記本体の重心位置を検出する検出部と、
前記検出部によって検出された前記重心が前記車輪の地面への接触点の鉛直線上に位置するように、前記モータの出力トルクを制御する制御部と、
をさらに備える、
こととしてもよい。
【0012】
この場合、前記検出部は、
前記車輪の回転角度及び角速度と、前記本体の回転角度及び角速度と、前記アームの回転角度及び角速度と、を検出し、
前記制御部は、
前記検出部の各検出結果を入力とし、前記モータの出力トルクを出力とする関係式を用いて、前記モータの出力トルクを決定する、
こととしてもよい。
【0013】
また、前記第1の回転軸、前記モータ、前記第1のプーリ、前記車輪、前記第2の回転軸、前記第2のプーリ、前記ベルト、前記アームとが、複数組設けられている、
こととしてもよい。
【発明の効果】
【0014】
本発明によれば、2つのプーリ、ベルト、アームを備える伝達機構のような簡単な構造を備えるだけで、段差により車輪が一時的に停止したとしても、本体の姿勢を垂直に保ったままで、本体の重心を自動的に段差の鉛直線上に移動させることができるので、本体を大きく傾斜させることなく、段差を昇降することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施形態に係るロボットの概略的な構成を示す斜視図である。
【図2】図1のロボットのホイール付近の拡大斜視図である。
【図3】伝達機構に生ずる力を説明するための模式図である。
【図4】制御系のブロック図である。
【図5】姿勢制御に用いられる入力情報及び出力情報を説明するための模式図である。
【図6】図6(A)乃至図6(D)は、ロボットが段差を乗り越える様子を示す図である。
【図7】図7(A)は、ロボットが平地を移動しているときの伝達機構の動きを説明するための図である。図7(B)は、このときに発生している力やトルクを説明するための図である。
【図8】図8(A)は、ロボットが段差に接触したときの伝達機構の動きを説明するための図である。図8(B)は、このときに発生している力やトルクを説明するための図である。
【発明を実施するための形態】
【0016】
本発明の実施の形態について、図面を参照して詳細に説明する。
【0017】
図1には、本実施の形態に係るロボット100の全体の斜視図が示されている。図1に示すように、ロボット100は、本体1と、2つの車輪(ホイール)2とを備える。ロボット100では、本体1の下部に2つのホイール2が、進行方向に直交する方向に略平行に配置されている。
【0018】
ロボット100は、2つのホイール2を用いた2輪走行により、前後に移動可能な倒立振子型のロボットである。すなわち、ロボット100は、いわゆる倒立平行二輪車である。
【0019】
ロボット100の高さは、例えば1.15mであり、全質量は例えば16.2kgである。本体1は、縦長であり、ロボット100の高さは、本体1の高さにほぼ等しい。ホイール2のタイヤとしては、例えば、20×1.1/8inchのものが用いられている。
【0020】
図2には、ロボット100のホイール2付近の拡大斜視図が示されている。図2に示すように、ロボット100は、本体1、ホイール2のほか、軸3と、プーリ4と、ベルト5と、プーリ6と、軸7と、アーム8と、を備える。
【0021】
本体1は、第1の回転軸としての軸3と連結されている。軸3は、本体1に対して不図示のベアリングを介して回転可能に連結されている。
【0022】
軸3は、モータ11(図2では不図示、図4参照)の駆動軸である。モータ11としては、例えば出力120Wのブラシレスモータを採用することができる。モータ11を駆動するための電力は、例えば2つの6セルのリチウムポリマー電池から供給されている。
【0023】
モータ11の回転により、軸3は、本体1に対して回転する。モータ11の出力は減速比50のハーモニックドライブにより減速されて軸3に入力される。また、軸3は、本体1を直接的に支持する。軸3から本体1の重心までの距離は、例えば0.547mである。
【0024】
軸3には、第1のプーリとしてのプーリ4が固定されている。プーリ4は、ベルト5を介して第2のプーリとしてのプーリ6と連結されている。プーリ4からプーリ6へはベルト5によって動力が伝達される。
【0025】
プーリ6としては、プーリ4よりも半径が大きいものが選ばれている。プーリ4とプーリ6には、タイミングプーリを用いており、ベルト5は、タイミングベルトである。プーリ4、6の歯数は、例えば24と72であり、プーリ比は、1:3となっている。
【0026】
プーリ6は第2の回転軸としての軸7の端部に固定されている。軸7はホイール2を回転させる回転軸である。
【0027】
さらに、軸7は、アーム8を介して軸3と連結されている。アーム8は、ベルト5と平行に、不図示のベアリングを介して軸3、7と連結されている。これにより、軸3と軸7とは、アーム8に対して自由に回転することができるうえ、アーム8により軸3と軸7との間は、一定の間隔に保たれている。その間隔、すなわちアーム8の軸間距離は、例えば0.197mである。
【0028】
なお、プーリ4、6のプーリ比やアーム8の長さは、プーリ4を所定角度だけ回転した場合に、アーム8を固定しホイール2を回転させたときの本体1の重心の移動量と、ホイール2やプーリ6を固定しアーム8を回転させたときの本体1の重心の移動量とがほぼ等しくなるように設定されている。
【0029】
図2に示される伝達機構は、いわば遊星車輪機構ともいうべきものである。すなわち、この伝達機構では、プーリ4の回転により、プーリ6が回転することが可能であるが、アーム8を例えば軸7を中心に回転させることにより、プーリ4をプーリ6の周りに回転(公転)させることも可能である。
【0030】
ここで、モータ11の回転トルクτinと、ホイール2を回転駆動するトルクτwと、アーム8に働くプーリ6の軸周りのトルクτaとの関係について考える。ここで、各トルク及び力の正負の向きについては、図3の矢印の向きを正として定義する。また、プーリ4の半径をrとし、プーリ6の半径をRとする。また、ベルトの張力をfとすると、トルクτwは、次式のようになる。
【0031】
【数1】
さらに、アーム8の軸間距離をlとし、アーム8とベルト5となす角度を図3に示すようにαと定義する。ベルト5の張力fの反力が軸3に働くため、アーム8の回転トルクτaは、次式のようになる。
【0032】
【数2】
sinαは、プーリ4、6の半径r、Rから次式のように定められる。
【0033】
【数3】
上記式(1)、式(2)、式(3)より、ホイール2の回転トルクτwとアーム8の回転トルクτaの関係は次式のようになる。
【0034】
【数4】
【0035】
図4には、ロボット100の制御系が示されている。図4に示すように、この制御系は、ロボット100内部に組み込まれた制御部10を中心に構築されている。また、この制御系を構築すべく、ロボット100は、モータ11に加え、アームエンコーダ12と、ジャイロセンサ13と、ホイールエンコーダ14とをさらに備える。
【0036】
ロボット100は、倒立振子型であり、本体1の重心が、ホイール2の地面との接触点の鉛直線上に位置するような姿勢制御を行う必要がある。制御部10は、CPU及びメモリ(いずれも不図示)を有する。CPUがメモリに格納されたプログラムを実行することにより、制御部10は、上述の姿勢制御を行う。
【0037】
より具体的には、制御部10は、モータ11へのトルク指令τinを生成する。このトルク指令τinを生成するために、制御部10は、アームエンコーダ12、ジャイロセンサ13、ホイールエンコーダ14からそれぞれ出力される情報を入力し、入力した情報をトルク指令τinの算出に用いる。
【0038】
アームエンコーダ12は、アーム8における軸7との連結部分に組み込まれている。アームエンコーダ12は、図5に示すように、鉛直線を基準として、軸7周りのアーム8の回転角度θaと、回転角速度ωaとを検出して、制御部10に出力する。
【0039】
ジャイロセンサ13は、本体1に組み込まれている。ジャイロセンサ13は、図5に示すように、鉛直線を基準として、軸3周りの本体1の回転角度θbと、回転角速度ωbとを検出して、制御部10に出力する。
【0040】
ホイールエンコーダ14は、ホイール2に組み込まれている。ホイールエンコーダ14は、ホイール2の回転角度θwと、回転角速度ωwとを検出して、制御部10に出力する。
【0041】
制御部10は、以下の演算式に基づいて、モータ10の指令トルクτinを算出する。
【数5】
ここで、K1、K2、K3、K4、K5、K6は、制御パラメータである。上記式(5)に係る制御パラメータは、本体1の重心が、ホイール2の地面との接触点の鉛直線上の位置に制御されるように最適化されている。
【0042】
また、ロボット100を一定速度vで移動させようとする場合には、上記式(5)を次式のように変形し、変形された演算式を用いて制御を行う。
【数6】
ここで、tは、移動を開始してからの時間である。
【0043】
次に、本実施形態に係るロボット100の動作について説明する。図6(A)乃至図6(D)には、ロボット100が、平地を移動して段差を乗り越える様子が示されている。
【0044】
まず、ロボット100が、平地を例えば一定速度vで移動させる場合について説明する。図6(A)に示すように、ロボット100が平地を移動している場合、本体1の重心が一定速度vで移動するため、制御部10は、本体1の重心の移動に合わせて、ホイール2を回転させる必要がある。そこで、制御部10は、上記式(6)を用いて、モータ11の回転トルクτinを算出し、算出された回転トルクτinでモータ11を回転させる。
【0045】
平地走行中は、ホイール2は、1点のみで地面と接触しているため、スムーズに回転可能となっている。このため、図7(A)に示すように、モータ11の回転にあわせて、プーリ6も回転する。
【0046】
このような状況では、急加速でもしない限り、ホイール2の回転トルクτwは、大きな値を取らない。この場合、上記式(4)より、アーム8の回転トルクτaも大きな値を取らない。また、軸3に働く力は、本体1の荷重wが支配的であると考えられるため、この状態では、図7(B)に示すように、アーム8の駆動により、本体1は持ち上がらない。
【0047】
続いて、図6(B)に示すように、ロボット100のホイール2が、段差に接触すると、ホイール2と地面との接触点の数は2つとなる。この時点で、ホイール2の回転は、一旦停止する。これにより、図8(A)に示すように、プーリ6の回転も停止するので、モータ11の回転トルクτinによる張力fにより、軸7周りのアーム8の回転トルクτaが生まれる。この回転トルクτaにより、図8(B)に示すように、アーム8が、軸7を中心に半時計周りに回転し、本体1を持ち上げるとともに、本体1を傾斜させることなく、重心をさらに移動させる。
【0048】
その後、図6(C)に示すように、アーム8の持ち上げにより、本体1の重心位置が、段差の位置を越えると、本体1の荷重wにより、アーム8の軸7周りの回転が停止した後、今度は、軸3周りに回転して、ホイール2を段差の上に引き上げる。その後、ロボット100は、再び、図6(A)の状態と同じ状態に戻り、全体が右側に移動するようになる。
【0049】
本実施形態に係るロボット100は、上記式(6)を用いた制御部10の倒立振子制御により、転倒することなく、段差を降りることも可能である。
【0050】
なお、図2の遊星車輪機構では、アーム8は、軸7を中心に360度回転可能であるが、アーム8の回転角度を、例えば鉛直線を基準として前後90度以内に制限するストッパを設けるようにしてもよい。
【0051】
アーム8の回転を制限するストッパが設けられている場合には、アーム8がストッパに衝突した反動で、ホイール2が段差の下から上に浮きあがるようにしてもよい。
【0052】
本発明者は、実際に、ロボット100を試作し、4cmや8cmの段差の昇降を成功させた。
【0053】
以上詳細に説明したように、本実施形態によれば、2つのプーリ4、6、ベルト5、アーム8を備える伝達機構のような簡単な構造を備えるだけで、段差によりホイール2が一時的に停止したとしても、本体1の姿勢を垂直に保ったままで、本体1の重心を自動的に段差の鉛直線上に移動させることができるので、本体1を大きく傾斜させることなく、段差を昇降することができる。
【0054】
このロボット100によれば、段差を認識するための外界センサを備えることなく、かつ、事前に段差の情報を入力することなく、段差を乗り越えることができる。
【0055】
段差を乗り越えるために、ホイール2を駆動するアクチュエータとは別に、アーム8を駆動するための別のアクチュエータを用いる方法も考えられる。しかしながら、この方法では、2つものアクチュエータを用いる必要があり、機構が複雑になるのみならず、アームを制御するために段差を認識するためのセンサも追加する必要がある。これに対し、ロボット100では、そのようなアクチュエータを備えることなく、段差を昇降することができる。
【0056】
上記実施の形態では、ロボット100の車輪の数は2つであったが、本発明はこれには限られない。例えば、車輪の数は1つであってもよいし、3つ以上であってもよい。すなわち、本発明は、一輪車、三輪車、四輪車等、車輪で移動する移動体であれば、適用が可能である。
【0057】
また、上記実施の形態では、制御部10がロボット100内に設けられているものとしたが、制御部10は、ロボット100外にあってもよい。この場合、センサからの情報は、有線通信又は無線通信(例えばCAN通信)を介して、外部のコントローラへ送信され、コントローラから送信されるモータ11へのトルク指令も、有線通信又は無線通信により、モータ11のドライバ(不図示)へ送信されるようにする必要がある。
【0058】
また、本体1の構造には、本発明は限定されず、例えば、人間が乗れるようになっていてもよいし、人間が、車輪をペダルで漕ぐことができる自転車のようなものであってもよい。
【0059】
なお、上記実施の形態において、制御部10において実行される制御プログラムは、フレキシブルディスク、CD−ROM(Compact Disc Read-Only Memory)、DVD(Digital Versatile Disc)、MO(Magneto-Optical Disc)等のコンピュータ読み取り可能な記録媒体に格納して配布し、そのプログラムをインストールすることにより、上述のスレッドを実行するシステムを構成することとしてもよい。
【0060】
また、制御プログラムをインターネット等の通信ネットワーク上の所定のサーバ装置が有するディスク装置等に格納しておき、例えば、搬送波に重畳させて、ダウンロード等するようにしてもよい。
【0061】
また、上述の機能を、OS(Operating System)が分担して実現する場合又はOSとアプリケーションとの協働により実現する場合等には、OS以外の部分のみを媒体に格納して配布してもよく、また、ダウンロード等してもよい。
【0062】
本発明は、本発明の広義の精神と範囲を逸脱することなく、様々な実施の形態及び変形が可能とされるものである。また、上述した実施の形態は、本発明を説明するためのものであり、本発明の範囲を限定するものではない。すなわち、本発明の範囲は、実施の形態ではなく、特許請求の範囲によって示される。そして、特許請求の範囲内及びそれと同等の発明の意義の範囲内で施される様々な変形が、本発明の範囲内とみなされる。
【産業上の利用可能性】
【0063】
本発明は、倒立振子型のロボットに適用するのに好適である。特に、人間の生活環境で活躍するロボットに適用するのが望ましい。
【符号の説明】
【0064】
100 ロボット
1 本体
2 ホイール
3 軸
4 プーリ
5 ベルト
6 プーリ
7 軸
8 アーム
10 制御部
11 モータ
12 アームエンコーダ
13 ジャイロセンサ
14 ホイールエンコーダ
【特許請求の範囲】
【請求項1】
本体と、
前記本体に回転可能に連結され前記本体を支持する第1の回転軸と、
前記第1の回転軸を回転駆動するモータと、
前記第1の回転軸に固定された第1のプーリと、
車輪と、
前記車輪を回転させる第2の回転軸と、
前記第2の回転軸に固定され前記第1のプーリよりも半径が大きい第2のプーリと、
前記第1のプーリと、前記第2のプーリとを連結するベルトと、
前記第1のプーリと、前記第2のプーリとを前記ベルトと並行して連結する前記車輪の半径よりも短いアームと、
を備える移動体。
【請求項2】
前記本体の重心位置を検出する検出部と、
前記検出部によって検出された前記重心が前記車輪の地面への接触点の鉛直線上に位置するように、前記モータの出力トルクを制御する制御部と、
をさらに備える、
ことを特徴とする請求項1に記載の移動体。
【請求項3】
前記検出部は、
前記車輪の回転角度及び角速度と、前記本体の回転角度及び角速度と、前記アームの回転角度及び角速度と、を検出し、
前記制御部は、
前記検出部の各検出結果を入力とし、前記モータの出力トルクを出力とする関係式を用いて、前記モータの出力トルクを決定する、
ことを特徴とする請求項2に記載の移動体。
【請求項4】
前記第1の回転軸、前記モータ、前記第1のプーリ、前記車輪、前記第2の回転軸、前記第2のプーリ、前記ベルト、前記アームとが、複数組設けられている、
ことを特徴とする請求項1乃至3のいずれか一項に記載の移動体。
【請求項1】
本体と、
前記本体に回転可能に連結され前記本体を支持する第1の回転軸と、
前記第1の回転軸を回転駆動するモータと、
前記第1の回転軸に固定された第1のプーリと、
車輪と、
前記車輪を回転させる第2の回転軸と、
前記第2の回転軸に固定され前記第1のプーリよりも半径が大きい第2のプーリと、
前記第1のプーリと、前記第2のプーリとを連結するベルトと、
前記第1のプーリと、前記第2のプーリとを前記ベルトと並行して連結する前記車輪の半径よりも短いアームと、
を備える移動体。
【請求項2】
前記本体の重心位置を検出する検出部と、
前記検出部によって検出された前記重心が前記車輪の地面への接触点の鉛直線上に位置するように、前記モータの出力トルクを制御する制御部と、
をさらに備える、
ことを特徴とする請求項1に記載の移動体。
【請求項3】
前記検出部は、
前記車輪の回転角度及び角速度と、前記本体の回転角度及び角速度と、前記アームの回転角度及び角速度と、を検出し、
前記制御部は、
前記検出部の各検出結果を入力とし、前記モータの出力トルクを出力とする関係式を用いて、前記モータの出力トルクを決定する、
ことを特徴とする請求項2に記載の移動体。
【請求項4】
前記第1の回転軸、前記モータ、前記第1のプーリ、前記車輪、前記第2の回転軸、前記第2のプーリ、前記ベルト、前記アームとが、複数組設けられている、
ことを特徴とする請求項1乃至3のいずれか一項に記載の移動体。
【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図1】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図1】
【公開番号】特開2012−240661(P2012−240661A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−116280(P2011−116280)
【出願日】平成23年5月24日(2011.5.24)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ハーモニックドライブ
【出願人】(504136568)国立大学法人広島大学 (924)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月24日(2011.5.24)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ハーモニックドライブ
【出願人】(504136568)国立大学法人広島大学 (924)
[ Back to top ]