
移動基準局を利用した車両間相対位置制御方法及びそのシステム
【課題】車両間相対位置の正確度を改善し、位置制御できる移動基準局を利用した車両間相対位置制御方法及びそのシステムを提供する。
【解決手段】DGPS補正信号を発信する移動基準局10と、DGPS補正信号を受信して位置制御を行う制御対象車両20とが備えられる車両位置制御システムにおいて、衛星からGPS信号を受信する第1のGPS受信部11と、検出された値を根拠に現在の位置情報を算出する位置算出部12と、DGPS補正信号生成部13と、DGPS補正信号を送り出す第1のV2X通信部14と、が備えられ、前記制御対象車両には、第2のV2X通信部21と、GPS信号を受信する第2のGPS受信部22と、受信されたDGPS補正信号と第2のGPS受信部により自己の位置情報を算出して補正するDGPS基盤位置情報補正部23と、車両の速度及び方向を制御する走行制御部24と、が備えられていることを特徴とする。
【解決手段】DGPS補正信号を発信する移動基準局10と、DGPS補正信号を受信して位置制御を行う制御対象車両20とが備えられる車両位置制御システムにおいて、衛星からGPS信号を受信する第1のGPS受信部11と、検出された値を根拠に現在の位置情報を算出する位置算出部12と、DGPS補正信号生成部13と、DGPS補正信号を送り出す第1のV2X通信部14と、が備えられ、前記制御対象車両には、第2のV2X通信部21と、GPS信号を受信する第2のGPS受信部22と、受信されたDGPS補正信号と第2のGPS受信部により自己の位置情報を算出して補正するDGPS基盤位置情報補正部23と、車両の速度及び方向を制御する走行制御部24と、が備えられていることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、
移動基準局を利用した車両間相対位置制御方法及びそのシステムに係り、より詳しくは、車両間通信を介し衛星航法補正システム(DGPS;Differential Global Positioning System)の移動基準局の役割を果たす車両と通信しながら車両間相対位置の正確度を改善し、位置制御を行う移動基準局を利用した車両間相対位置制御方法及びそのシステムに関する。
【背景技術】
【0002】
衛星航法装置又は衛星位置確認システムと呼ばれるGPS(Global Positioning System)は全世界で利用されている位置確認技術であって、現在まで開発されたもののうち最も正確度の高い位置確認システム中の一つである。
しかし、一般にGPSを利用した位置測定上の誤差範囲は5〜15mであり、無線環境に従っては最大30mまで誤差が発生するため、一般の車両安全技術で求められる性能が満足されていない。
このような点を考慮し、車両安全技術分野では衛星航法補正システム(DGPS又はDGPS−RTK)(以下、「DGPS」と記す)が広く利用されている。
DGPSは、相対測位方式のGPS測量技法であって、既知の基準点座標を利用して誤差を起こす要素等を補正し、誤差をできるだけ低減することにより一層正確な位置情報を得るようにしたものである。
【0003】
一方、多量の貨物を何台かの車両に分けて一度に移送するか、行事に参加中の多数の車両の列を合わせて移動させなければならない場合は、何台かの移動体(モビリティー)が最小限の安全距離を維持したまま共に動く所謂群集自律走行をすることになる。このような群集自律走行は後続車両の空気抵抗を低減して燃費を向上させ、事故の危険を減少させるとともに、各車両の運転士に対する利便性を向上できる利点があるが、DGPSなどを利用して車両間相対位置を精密に制御するための高度の技術を要するので、各車両に必要なセンサと装置などを取り付けるために多額の費用を要する問題がある。
【0004】
さらに、車両の絶対位置サービスが不可能な場合、車両間相対位置正確度を改善させる技術が必要であるが、DGPSは基準局のカバー範囲に限界がある。さらに、商用DGPS補正信号の場合、サービスを受ける位置が基準局と遠く離れているため、DGPSを利用するとしても位置正確度を改善できない問題点があった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−170404号公報
【特許文献2】特開2006−323527号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、前記の事情を勘案してなされたものであって、車両間通信を介し衛星航法補正システム(DGPS;Differential Global Positioning System)の移動基準局の役割を果たす車両と通信しながら車両間相対位置の正確度を改善し、位置制御をできるようにした移動基準局を利用した車両間相対位置制御方法及びそのシステムを提供することにその目的がある。
【課題を解決するための手段】
【0007】
本発明に係る移動基準局を利用した車両間相対位置制御システムは、DGPS補正信号を発信する移動基準局と、この移動基準局からDGPS補正信号を受信して位置制御を行う制御対象車両とが備えられる車両位置制御システムにおいて、前記移動基準局には、衛星からGPS信号を受信する第1のGPS受信部と、受信されたGPS信号及び内部のセンサにより検出された値を根拠に現在の位置情報を算出し出す位置算出部と、算出された位置情報と前記第1のGPS受信部により受信されたGPS情報を根拠にDGPS補正信号を生成するDGPS補正信号生成部と、前記制御対象車両へ前記DGPS補正信号生成部から生成されたDGPS補正信号を送り出す第1のV2X通信部とが備えられ、前記制御対象車両には、前記移動基準局の第1のV2X通信部から発信されるDGPS補正信号を受信するための第2のV2X通信部と、衛星からGPS信号を受信する第2のGPS受信部と、前記第2のV2X通信部により受信されたDGPS補正信号と第2のGPS受信部により受信されたGPS情報とを根拠に自分の位置情報を算出して補正するDGPS基盤位置情報補正部と、このDGPS基盤位置情報補正部から出力される位置情報に基づき車両の速度及び方向を制御する走行制御部と、が備えられていることを特徴とする。
【0008】
前記移動基準局を先導車両にして、少なくとも一つ以上の制御対象車両が前記先導車両の追従車両に編成されていることを特徴とする。
【0009】
前記位置算出部には慣性測定装置(IMU;Inertial Measurement System)と慣性航法装置(INS;Inertial Navigation System)が備えられていることを特徴とする。
【0010】
前記慣性測定装置は、内蔵された振子の3次元空間内での自在な動きを根拠に回転慣性を測定することのできるジャイロ計と加速度計、そして方位角を測定することのできる地磁界を軸に車両の動きを測定することを特徴とする。
【0011】
前記慣性航法装置は、前記慣性測定装置のジャイロ計から得た加速度を積分して速度を求め、この速度を積分して位置と角度を求める方式で具現されていることを特徴とする。
【0012】
また、本発明は、DGPS補正信号を発信する移動基準局と、この移動基準局からDGPS補正信号を受信して位置制御を行う制御対象車両とが備えられる車両位置制御システムにおいて、前記移動基準局では、衛星からGPS情報を受信する第1のGPS受信ステップと、この受信されたGPS情報を根拠に移動速度/方向などを参照して現在の位置情報を算出する位置情報算出ステップと、この算出された位置情報と前記第1のGPS受信ステップで受信されたGPS情報とを約定されたアルゴリズムを介し演算してDGPS補正信号を生成するDGPS補正信号生成ステップと、この生成されたDGPS補正信号を送り出すDGPS補正信号送出ステップと、を含み、前記制御対象車両では、前記DGPS補正信号送出ステップで送り出されたDGPS補正信号を受信する補正信号受信ステップと、衛星からGPS情報を受信する第2のGPS受信ステップと、受信されたGPS情報とDGPS補正信号とを根拠に位置情報を算出して位置補正を行う位置情報算出ステップと、この算出ステップで算出された位置情報に従い制御対象車両の速度と方向を調整する走行制御ステップと、を含むことを特徴とする。
【0013】
前記第1のGPS受信ステップに先立ち位置換算の基準となる最初の基準点を入力する基準点入力ステップをさらに備え、前記位置情報算出ステップでは、前記基準点入力ステップで入力された最初の基準点を根拠に移動基準局の絶対位置を算出することを特徴とする。
【0014】
前記移動基準局を先導車両にして、少なくとも一つ以上の制御対象車両を前記先導車両の追従車両に編制し、前記先導車両が前記追従車両の相対位置を制御することを特徴とする。
【0015】
前記位置情報算出ステップは、内蔵された振子の3次元空間内での自在な動きを根拠に回転慣性を測定することのできるジャイロ計と加速度計、そして方位角を測定することのできる地磁界を軸に移動基準局の動きを測定することを特徴とする。
【0016】
前記位置情報算出ステップは、前記ジャイロ計から得た加速度を積分して速度を求め、この速度を積分して位置と角度を求める方式で具現されていることを特徴とする。
【発明の効果】
【0017】
本発明によれば、DGPS移動基準局の機能を行う車両を利用するため、DGPSサービス領域に制限を受けず、位置算出部を利用して車両間の相対位置はもちろん移動経路も把握することができ、位置算出部に直接初期化値をセッティングすることができるので、一般のDGPS基準局を利用する場合に比べ速やかなサービスが可能である。
さらに、群集走行の場合、各車両ごとに先頭車両を追跡するための別のセンサと装備を必要としないので、経費低減ができ、群集自律走行車両だけでなく周辺の車両等にも位置サービスを提供できる効果がある。
即ち、移動基準局の役割を果たす先導車両を中心に群集自律走行をする場合でなくとも、DGPS移動基準局から受信した位置情報を根拠に隣接した車両との相対位置を把握し、これを根拠に車両の走行を自動制御することにより車両の安全運行を誘導するサービスにも活用することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の1実施形態に係る移動基準局を利用した車両間相対位置制御システムの構成を示すブロック構成図である。
【図2】(a)は、移動基準局の役割を果たす先導車両10におけるDGPS補正信号生成及び送出過程を説明するための図である。 (b)は、DGPS補正信号を受信する追従車両20における位置制御動作を説明するためのフローチャートである。
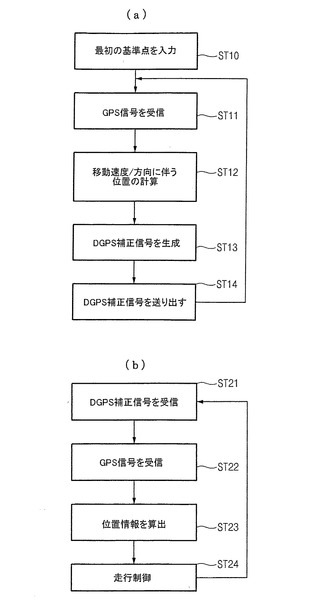
【図3】本発明に係る移動基準局を利用した車両間相対位置制御技術の概念を説明するための図である。
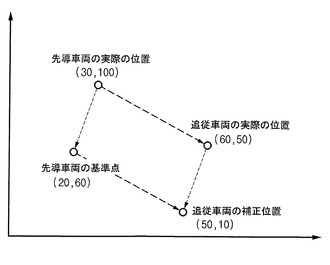
【図4】任意の基準点で先導車両10と追従車両20の相対位置を補正する過程を例示した図である。
【発明を実施するための形態】
【0019】
以下、図を参照し本発明について詳しく説明する。
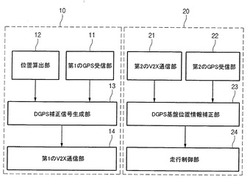
図1は、本発明の1実施形態に係る移動基準局を利用した車両間相対位置制御システムの構成を示すブロック構成図である。
図1において符号10は、GPS信号を根拠に現在の位置を算出する機能を備え移動基準局の役割を果たす先導車両であり、符号20は、車両間通信を利用して前記先導車両10からDGPS補正信号を受信して位置制御を行う追従車両である。
一方、先導車両10には衛星からGPS信号を受信する第1のGPS受信部11と、慣性測定装置(IMU;Inertial Measurement System)及び慣性航法装置(INS;Inertial Navigation System)が備えられた位置算出部12とが備えられ、車両の絶対位置情報を算出する機能が搭載される。
【0020】
さらに、先導車両10には、位置算出部12により算出された車両の位置情報と第1のGPS受信部11により受信されたGPS情報とを根拠にDGPS補正信号を生成するDGPS補正信号生成部13と、通信可能領域内の他の車両、即ち追従車両20にDGPS補正信号生成部13から生成されたDGPS補正信号を送り出す第1のV2X通信部14とが備えられる。
一方、追従車両20の内部には、先導車両10の第1のV2X通信部14から発信されるDGPS補正信号を受信するための第2のV2X通信部21と、衛星からGPS信号を受信する第2のGPS受信部22と、第2のV2X通信部21により受信されたDGPS補正信号と第2のGPS受信部22により受信されたGPS情報を根拠に自己の位置情報を算出して補正するDGPS基盤位置情報補正部23と、このDGPS基盤位置情報補正部23から出力される位置情報に基づき車両の速度及び方向を制御する走行制御部24とが備えられる。
【0021】
次いで、図2のフローチャートを参照して本発明のシステムの動作を説明する。
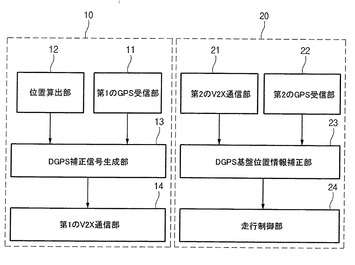
図2(a)は、移動基準局の役割を果たす先導車両10におけるDGPS補正信号の生成及び送出過程を説明するための図であり、(b)は、DGPS補正信号を受信する追従車両20における位置制御動作を説明するためのフローチャートである。
図2(a)に示す通り、移動基準局の役割を果たす先導車両10で、運転士が位置換算の基準となる最初の基準点を入力すれば(ST10)、DGPS補正信号生成部13は第1のGPS受信部11を介し衛星からGPS情報を受信し(ST11)、位置算出部12を介して受信されたGPS情報を根拠に移動速度/方向などを参照して現在の位置情報を算出する(ST12)。
【0022】
一方、位置算出部12で現在の位置情報を算出する過程は、位置算出部12の内部に備えられた慣性測定装置(以下、IMUと称する)が内蔵された振子の3次元空間内での自在な動きを根拠に回転慣性を測定するできるジャイロ計と加速度計、そして方位角を測定できる地磁界を軸に車両の動きを測定し、慣性航法装置(以下、INSと称する)はIMUのジャイロスコープから得た加速度を積分して速度を求め、この速度を積分して位置と角度を求める。
【0023】
ST12ステップで算出された位置情報はDGPS補正信号生成部13に入力され、DGPS補正信号生成部13は入力された位置情報と第1のGPS受信部11により受信されたGPS情報とを約定されたアルゴリズムを介し演算してDGPS補正信号を生成した後(ST13)、これを第1のV2X通信部14を介し送り出す(ST14)。
前記過程により送り出されたDGPS補正信号は、通信可能領域内に位置した追従車両20により受信される。受信されたDGPS補正信号の処理過程は図2(b)のフローチャートを参照しながら説明する。
【0024】
図2(b)に示す通り、追従車両20のDGPS基盤位置情報補正部23は、第2のV2X通信部21によりDGPS補正信号が受信されれば(ST21)、第2のGPS受信部22を介し衛星からGPS情報を受信し(ST22)、受信されたGPS情報とDGPS補正信号とを根拠に位置情報を算出し位置補正を行う(ST23)。
次いで、DGPS基盤位置情報補正部23は、前述の過程により算出された位置情報に従い走行制御部24を制御し、追従車両20の速度と方向を調整する(ST24)。
したがって、図3に示す通り、先導車両10を中心に多数の追従車両20が群集走行をする場合、追従車両等は先導車両から送り出されるDGPS補正信号を根拠に自分の位置情報を補正することができ、相対的位置関係を把握でき、速度と方向を精緻に制御することにより、多大な費用の負担なく群集走行を行うことができる。
【0025】
即ち、前記実施形態によれば、DGPS移動基準局の機能を行う車両を利用して位置情報が補正できることにより、DGPSサービス領域に制限を受けず、位置算出部を利用して車両間の相対位置はもちろん移動経路も把握することができ、位置算出部に直接初期化値をセッティングできるので、図4に示す通り、任意の基準点でも実際の先導車両と追従車両の相対的な位置の差が補正可能であるだけでなく、一般のDGPS基準局を利用する場合に比べ速やかなサービスが可能となる。
【0026】
さらに、群集走行の場合、各車両ごとに先頭車両を追跡するための別のセンサと装備を必要としないので、経費が節減でき、群集自律走行車両だけでなく周辺の車両等にも位置サービスを提供することができる。
前記実施形態では移動基準局の役割を果たす先導車両を中心に群集自律走行をする場合を中心に説明したが、群集走行でない場合でも、DGPS移動基準局から受信した位置情報を根拠に隣接した車両との相対位置を把握し、これを根拠に車両の走行を自動制御することにより、車両の安全運行を誘導するサービスにも活用することができる。
【0027】
以上、本発明に関する好ましい実施形態を説明したが、本発明は前記実施形態に限定されるものではなく、本発明の属する技術分野を逸脱しない範囲での全ての変更が含まれる。
【符号の説明】
【0028】
10 先導車両
11 第1のGPS受信部
12 位置算出部
13 DGPS補正信号生成部
14 第1のV2X通信部
20 追従車両
21 第2のV2X通信部
22 第2のGPS受信部
23 DGPS基盤位置情報補正部
24 走行制御部
【技術分野】
【0001】
本発明は、
移動基準局を利用した車両間相対位置制御方法及びそのシステムに係り、より詳しくは、車両間通信を介し衛星航法補正システム(DGPS;Differential Global Positioning System)の移動基準局の役割を果たす車両と通信しながら車両間相対位置の正確度を改善し、位置制御を行う移動基準局を利用した車両間相対位置制御方法及びそのシステムに関する。
【背景技術】
【0002】
衛星航法装置又は衛星位置確認システムと呼ばれるGPS(Global Positioning System)は全世界で利用されている位置確認技術であって、現在まで開発されたもののうち最も正確度の高い位置確認システム中の一つである。
しかし、一般にGPSを利用した位置測定上の誤差範囲は5〜15mであり、無線環境に従っては最大30mまで誤差が発生するため、一般の車両安全技術で求められる性能が満足されていない。
このような点を考慮し、車両安全技術分野では衛星航法補正システム(DGPS又はDGPS−RTK)(以下、「DGPS」と記す)が広く利用されている。
DGPSは、相対測位方式のGPS測量技法であって、既知の基準点座標を利用して誤差を起こす要素等を補正し、誤差をできるだけ低減することにより一層正確な位置情報を得るようにしたものである。
【0003】
一方、多量の貨物を何台かの車両に分けて一度に移送するか、行事に参加中の多数の車両の列を合わせて移動させなければならない場合は、何台かの移動体(モビリティー)が最小限の安全距離を維持したまま共に動く所謂群集自律走行をすることになる。このような群集自律走行は後続車両の空気抵抗を低減して燃費を向上させ、事故の危険を減少させるとともに、各車両の運転士に対する利便性を向上できる利点があるが、DGPSなどを利用して車両間相対位置を精密に制御するための高度の技術を要するので、各車両に必要なセンサと装置などを取り付けるために多額の費用を要する問題がある。
【0004】
さらに、車両の絶対位置サービスが不可能な場合、車両間相対位置正確度を改善させる技術が必要であるが、DGPSは基準局のカバー範囲に限界がある。さらに、商用DGPS補正信号の場合、サービスを受ける位置が基準局と遠く離れているため、DGPSを利用するとしても位置正確度を改善できない問題点があった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−170404号公報
【特許文献2】特開2006−323527号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、前記の事情を勘案してなされたものであって、車両間通信を介し衛星航法補正システム(DGPS;Differential Global Positioning System)の移動基準局の役割を果たす車両と通信しながら車両間相対位置の正確度を改善し、位置制御をできるようにした移動基準局を利用した車両間相対位置制御方法及びそのシステムを提供することにその目的がある。
【課題を解決するための手段】
【0007】
本発明に係る移動基準局を利用した車両間相対位置制御システムは、DGPS補正信号を発信する移動基準局と、この移動基準局からDGPS補正信号を受信して位置制御を行う制御対象車両とが備えられる車両位置制御システムにおいて、前記移動基準局には、衛星からGPS信号を受信する第1のGPS受信部と、受信されたGPS信号及び内部のセンサにより検出された値を根拠に現在の位置情報を算出し出す位置算出部と、算出された位置情報と前記第1のGPS受信部により受信されたGPS情報を根拠にDGPS補正信号を生成するDGPS補正信号生成部と、前記制御対象車両へ前記DGPS補正信号生成部から生成されたDGPS補正信号を送り出す第1のV2X通信部とが備えられ、前記制御対象車両には、前記移動基準局の第1のV2X通信部から発信されるDGPS補正信号を受信するための第2のV2X通信部と、衛星からGPS信号を受信する第2のGPS受信部と、前記第2のV2X通信部により受信されたDGPS補正信号と第2のGPS受信部により受信されたGPS情報とを根拠に自分の位置情報を算出して補正するDGPS基盤位置情報補正部と、このDGPS基盤位置情報補正部から出力される位置情報に基づき車両の速度及び方向を制御する走行制御部と、が備えられていることを特徴とする。
【0008】
前記移動基準局を先導車両にして、少なくとも一つ以上の制御対象車両が前記先導車両の追従車両に編成されていることを特徴とする。
【0009】
前記位置算出部には慣性測定装置(IMU;Inertial Measurement System)と慣性航法装置(INS;Inertial Navigation System)が備えられていることを特徴とする。
【0010】
前記慣性測定装置は、内蔵された振子の3次元空間内での自在な動きを根拠に回転慣性を測定することのできるジャイロ計と加速度計、そして方位角を測定することのできる地磁界を軸に車両の動きを測定することを特徴とする。
【0011】
前記慣性航法装置は、前記慣性測定装置のジャイロ計から得た加速度を積分して速度を求め、この速度を積分して位置と角度を求める方式で具現されていることを特徴とする。
【0012】
また、本発明は、DGPS補正信号を発信する移動基準局と、この移動基準局からDGPS補正信号を受信して位置制御を行う制御対象車両とが備えられる車両位置制御システムにおいて、前記移動基準局では、衛星からGPS情報を受信する第1のGPS受信ステップと、この受信されたGPS情報を根拠に移動速度/方向などを参照して現在の位置情報を算出する位置情報算出ステップと、この算出された位置情報と前記第1のGPS受信ステップで受信されたGPS情報とを約定されたアルゴリズムを介し演算してDGPS補正信号を生成するDGPS補正信号生成ステップと、この生成されたDGPS補正信号を送り出すDGPS補正信号送出ステップと、を含み、前記制御対象車両では、前記DGPS補正信号送出ステップで送り出されたDGPS補正信号を受信する補正信号受信ステップと、衛星からGPS情報を受信する第2のGPS受信ステップと、受信されたGPS情報とDGPS補正信号とを根拠に位置情報を算出して位置補正を行う位置情報算出ステップと、この算出ステップで算出された位置情報に従い制御対象車両の速度と方向を調整する走行制御ステップと、を含むことを特徴とする。
【0013】
前記第1のGPS受信ステップに先立ち位置換算の基準となる最初の基準点を入力する基準点入力ステップをさらに備え、前記位置情報算出ステップでは、前記基準点入力ステップで入力された最初の基準点を根拠に移動基準局の絶対位置を算出することを特徴とする。
【0014】
前記移動基準局を先導車両にして、少なくとも一つ以上の制御対象車両を前記先導車両の追従車両に編制し、前記先導車両が前記追従車両の相対位置を制御することを特徴とする。
【0015】
前記位置情報算出ステップは、内蔵された振子の3次元空間内での自在な動きを根拠に回転慣性を測定することのできるジャイロ計と加速度計、そして方位角を測定することのできる地磁界を軸に移動基準局の動きを測定することを特徴とする。
【0016】
前記位置情報算出ステップは、前記ジャイロ計から得た加速度を積分して速度を求め、この速度を積分して位置と角度を求める方式で具現されていることを特徴とする。
【発明の効果】
【0017】
本発明によれば、DGPS移動基準局の機能を行う車両を利用するため、DGPSサービス領域に制限を受けず、位置算出部を利用して車両間の相対位置はもちろん移動経路も把握することができ、位置算出部に直接初期化値をセッティングすることができるので、一般のDGPS基準局を利用する場合に比べ速やかなサービスが可能である。
さらに、群集走行の場合、各車両ごとに先頭車両を追跡するための別のセンサと装備を必要としないので、経費低減ができ、群集自律走行車両だけでなく周辺の車両等にも位置サービスを提供できる効果がある。
即ち、移動基準局の役割を果たす先導車両を中心に群集自律走行をする場合でなくとも、DGPS移動基準局から受信した位置情報を根拠に隣接した車両との相対位置を把握し、これを根拠に車両の走行を自動制御することにより車両の安全運行を誘導するサービスにも活用することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の1実施形態に係る移動基準局を利用した車両間相対位置制御システムの構成を示すブロック構成図である。
【図2】(a)は、移動基準局の役割を果たす先導車両10におけるDGPS補正信号生成及び送出過程を説明するための図である。 (b)は、DGPS補正信号を受信する追従車両20における位置制御動作を説明するためのフローチャートである。
【図3】本発明に係る移動基準局を利用した車両間相対位置制御技術の概念を説明するための図である。
【図4】任意の基準点で先導車両10と追従車両20の相対位置を補正する過程を例示した図である。
【発明を実施するための形態】
【0019】
以下、図を参照し本発明について詳しく説明する。
図1は、本発明の1実施形態に係る移動基準局を利用した車両間相対位置制御システムの構成を示すブロック構成図である。
図1において符号10は、GPS信号を根拠に現在の位置を算出する機能を備え移動基準局の役割を果たす先導車両であり、符号20は、車両間通信を利用して前記先導車両10からDGPS補正信号を受信して位置制御を行う追従車両である。
一方、先導車両10には衛星からGPS信号を受信する第1のGPS受信部11と、慣性測定装置(IMU;Inertial Measurement System)及び慣性航法装置(INS;Inertial Navigation System)が備えられた位置算出部12とが備えられ、車両の絶対位置情報を算出する機能が搭載される。
【0020】
さらに、先導車両10には、位置算出部12により算出された車両の位置情報と第1のGPS受信部11により受信されたGPS情報とを根拠にDGPS補正信号を生成するDGPS補正信号生成部13と、通信可能領域内の他の車両、即ち追従車両20にDGPS補正信号生成部13から生成されたDGPS補正信号を送り出す第1のV2X通信部14とが備えられる。
一方、追従車両20の内部には、先導車両10の第1のV2X通信部14から発信されるDGPS補正信号を受信するための第2のV2X通信部21と、衛星からGPS信号を受信する第2のGPS受信部22と、第2のV2X通信部21により受信されたDGPS補正信号と第2のGPS受信部22により受信されたGPS情報を根拠に自己の位置情報を算出して補正するDGPS基盤位置情報補正部23と、このDGPS基盤位置情報補正部23から出力される位置情報に基づき車両の速度及び方向を制御する走行制御部24とが備えられる。
【0021】
次いで、図2のフローチャートを参照して本発明のシステムの動作を説明する。
図2(a)は、移動基準局の役割を果たす先導車両10におけるDGPS補正信号の生成及び送出過程を説明するための図であり、(b)は、DGPS補正信号を受信する追従車両20における位置制御動作を説明するためのフローチャートである。
図2(a)に示す通り、移動基準局の役割を果たす先導車両10で、運転士が位置換算の基準となる最初の基準点を入力すれば(ST10)、DGPS補正信号生成部13は第1のGPS受信部11を介し衛星からGPS情報を受信し(ST11)、位置算出部12を介して受信されたGPS情報を根拠に移動速度/方向などを参照して現在の位置情報を算出する(ST12)。
【0022】
一方、位置算出部12で現在の位置情報を算出する過程は、位置算出部12の内部に備えられた慣性測定装置(以下、IMUと称する)が内蔵された振子の3次元空間内での自在な動きを根拠に回転慣性を測定するできるジャイロ計と加速度計、そして方位角を測定できる地磁界を軸に車両の動きを測定し、慣性航法装置(以下、INSと称する)はIMUのジャイロスコープから得た加速度を積分して速度を求め、この速度を積分して位置と角度を求める。
【0023】
ST12ステップで算出された位置情報はDGPS補正信号生成部13に入力され、DGPS補正信号生成部13は入力された位置情報と第1のGPS受信部11により受信されたGPS情報とを約定されたアルゴリズムを介し演算してDGPS補正信号を生成した後(ST13)、これを第1のV2X通信部14を介し送り出す(ST14)。
前記過程により送り出されたDGPS補正信号は、通信可能領域内に位置した追従車両20により受信される。受信されたDGPS補正信号の処理過程は図2(b)のフローチャートを参照しながら説明する。
【0024】
図2(b)に示す通り、追従車両20のDGPS基盤位置情報補正部23は、第2のV2X通信部21によりDGPS補正信号が受信されれば(ST21)、第2のGPS受信部22を介し衛星からGPS情報を受信し(ST22)、受信されたGPS情報とDGPS補正信号とを根拠に位置情報を算出し位置補正を行う(ST23)。
次いで、DGPS基盤位置情報補正部23は、前述の過程により算出された位置情報に従い走行制御部24を制御し、追従車両20の速度と方向を調整する(ST24)。
したがって、図3に示す通り、先導車両10を中心に多数の追従車両20が群集走行をする場合、追従車両等は先導車両から送り出されるDGPS補正信号を根拠に自分の位置情報を補正することができ、相対的位置関係を把握でき、速度と方向を精緻に制御することにより、多大な費用の負担なく群集走行を行うことができる。
【0025】
即ち、前記実施形態によれば、DGPS移動基準局の機能を行う車両を利用して位置情報が補正できることにより、DGPSサービス領域に制限を受けず、位置算出部を利用して車両間の相対位置はもちろん移動経路も把握することができ、位置算出部に直接初期化値をセッティングできるので、図4に示す通り、任意の基準点でも実際の先導車両と追従車両の相対的な位置の差が補正可能であるだけでなく、一般のDGPS基準局を利用する場合に比べ速やかなサービスが可能となる。
【0026】
さらに、群集走行の場合、各車両ごとに先頭車両を追跡するための別のセンサと装備を必要としないので、経費が節減でき、群集自律走行車両だけでなく周辺の車両等にも位置サービスを提供することができる。
前記実施形態では移動基準局の役割を果たす先導車両を中心に群集自律走行をする場合を中心に説明したが、群集走行でない場合でも、DGPS移動基準局から受信した位置情報を根拠に隣接した車両との相対位置を把握し、これを根拠に車両の走行を自動制御することにより、車両の安全運行を誘導するサービスにも活用することができる。
【0027】
以上、本発明に関する好ましい実施形態を説明したが、本発明は前記実施形態に限定されるものではなく、本発明の属する技術分野を逸脱しない範囲での全ての変更が含まれる。
【符号の説明】
【0028】
10 先導車両
11 第1のGPS受信部
12 位置算出部
13 DGPS補正信号生成部
14 第1のV2X通信部
20 追従車両
21 第2のV2X通信部
22 第2のGPS受信部
23 DGPS基盤位置情報補正部
24 走行制御部
【特許請求の範囲】
【請求項1】
DGPS補正信号を発信する移動基準局と、この移動基準局からDGPS補正信号を受信して位置制御を行う制御対象車両とが備えられる車両位置制御システムにおいて、
前記移動基準局には、衛星からGPS信号を受信する第1のGPS受信部と、受信されたGPS信号及び内部のセンサにより検出された値を根拠に現在の位置情報を算出し出す位置算出部と、算出された位置情報と前記第1のGPS受信部により受信されたGPS情報を根拠にDGPS補正信号を生成するDGPS補正信号生成部と、前記制御対象車両へ前記DGPS補正信号生成部から生成されたDGPS補正信号を送り出す第1のV2X通信部とが備えられ、
前記制御対象車両には、前記移動基準局の第1のV2X通信部から発信されるDGPS補正信号を受信するための第2のV2X通信部と、衛星からGPS信号を受信する第2のGPS受信部と、前記第2のV2X通信部により受信されたDGPS補正信号と第2のGPS受信部により受信されたGPS情報とを根拠に自分の位置情報を算出して補正するDGPS基盤位置情報補正部と、このDGPS基盤位置情報補正部から出力される位置情報に基づき車両の速度及び方向を制御する走行制御部とが備えられていることを特徴とする移動基準局を利用した車両間相対位置制御システム。
【請求項2】
前記移動基準局を先導車両にして、
少なくとも一つ以上の制御対象車両が前記先導車両の追従車両に編成されていることを特徴とする請求項1に記載の移動基準局を利用した車両間相対位置制御システム。
【請求項3】
前記位置算出部には、慣性測定装置(IMU;Inertial Measurement System)と慣性航法装置(INS;Inertial Navigation System)が備えられていることを特徴とする請求項1に記載の移動基準局を利用した車両間相対位置制御システム。
【請求項4】
前記慣性測定装置は、内蔵された振子の3次元空間内での自在な動きを根拠に回転慣性を測定することのできるジャイロ計と加速度計、そして方位角を測定することのできる地磁界を軸に車両の動きを測定することを特徴とする請求項3に記載の移動基準局を利用した車両間相対位置制御システム。
【請求項5】
前記慣性航法装置は、前記慣性測定装置のジャイロ計から得た加速度を積分して速度を求め、この速度を積分して位置と角度を求める方式で具現されていることを特徴とする請求項4に記載の移動基準局を利用した車両間相対位置制御システム。
【請求項6】
DGPS補正信号を発信する移動基準局と、この移動基準局からDGPS補正信号を受信して位置制御を行う制御対象車両とが備えられる車両位置制御システムにおいて、
前記移動基準局では、衛星からGPS情報を受信する第1のGPS受信ステップと、
受信されたGPS情報を根拠に移動速度/方向などを参照して現在の位置情報を算出する位置情報算出ステップと、
算出された位置情報と前記第1のGPS受信ステップで受信されたGPS情報とを約定されたアルゴリズムを介し演算してDGPS補正信号を生成するDGPS補正信号生成ステップと、
生成されたDGPS補正信号を送り出すDGPS補正信号送出ステップと、を含み、
前記制御対象車両では、前記DGPS補正信号送出ステップで送り出されたDGPS補正信号を受信する補正信号受信ステップと、
衛星からGPS情報を受信する第2のGPS受信ステップと、
受信されたGPS情報とDGPS補正信号とを根拠に位置情報を算出して位置補正を行う位置情報算出ステップと、
算出ステップで算出された位置情報に従い制御対象車両の速度と方向を調整する走行制御ステップと、
を含むことを特徴とする移動基準局を利用した車両間相対位置制御方法。
【請求項7】
前記第1のGPS受信ステップに先立ち位置換算の基準となる最初の基準点を入力する基準点入力ステップをさらに備え、
前記位置情報算出ステップでは、前記基準点入力ステップで入力された最初の基準点を根拠に移動基準局の絶対位置を算出することを特徴とする請求項6に記載の移動基準局を利用した車両間相対位置制御方法。
【請求項8】
前記移動基準局を先導車両にして、
少なくとも一つ以上の制御対象車両を前記先導車両の追従車両に編制し、
前記先導車両が前記追従車両の相対位置を制御することを特徴とする請求項6に記載の移動基準局を利用した車両間相対位置制御方法。
【請求項9】
前記位置情報算出ステップは、内蔵された振子の3次元空間内での自在な動きを根拠に回転慣性を測定することのできるジャイロ計と加速度計、そして方位角を測定することのできる地磁界を軸に移動基準局の動きを測定することを特徴とする請求項6に記載の移動基準局を利用した車両間相対位置制御方法。
【請求項10】
前記位置情報算出ステップは、前記ジャイロ計から得た加速度を積分して速度を求め、この速度を積分して位置と角度を求める方式で具現されていることを特徴とする請求項9に記載の移動基準局を利用した車両間相対位置制御方法。
【請求項1】
DGPS補正信号を発信する移動基準局と、この移動基準局からDGPS補正信号を受信して位置制御を行う制御対象車両とが備えられる車両位置制御システムにおいて、
前記移動基準局には、衛星からGPS信号を受信する第1のGPS受信部と、受信されたGPS信号及び内部のセンサにより検出された値を根拠に現在の位置情報を算出し出す位置算出部と、算出された位置情報と前記第1のGPS受信部により受信されたGPS情報を根拠にDGPS補正信号を生成するDGPS補正信号生成部と、前記制御対象車両へ前記DGPS補正信号生成部から生成されたDGPS補正信号を送り出す第1のV2X通信部とが備えられ、
前記制御対象車両には、前記移動基準局の第1のV2X通信部から発信されるDGPS補正信号を受信するための第2のV2X通信部と、衛星からGPS信号を受信する第2のGPS受信部と、前記第2のV2X通信部により受信されたDGPS補正信号と第2のGPS受信部により受信されたGPS情報とを根拠に自分の位置情報を算出して補正するDGPS基盤位置情報補正部と、このDGPS基盤位置情報補正部から出力される位置情報に基づき車両の速度及び方向を制御する走行制御部とが備えられていることを特徴とする移動基準局を利用した車両間相対位置制御システム。
【請求項2】
前記移動基準局を先導車両にして、
少なくとも一つ以上の制御対象車両が前記先導車両の追従車両に編成されていることを特徴とする請求項1に記載の移動基準局を利用した車両間相対位置制御システム。
【請求項3】
前記位置算出部には、慣性測定装置(IMU;Inertial Measurement System)と慣性航法装置(INS;Inertial Navigation System)が備えられていることを特徴とする請求項1に記載の移動基準局を利用した車両間相対位置制御システム。
【請求項4】
前記慣性測定装置は、内蔵された振子の3次元空間内での自在な動きを根拠に回転慣性を測定することのできるジャイロ計と加速度計、そして方位角を測定することのできる地磁界を軸に車両の動きを測定することを特徴とする請求項3に記載の移動基準局を利用した車両間相対位置制御システム。
【請求項5】
前記慣性航法装置は、前記慣性測定装置のジャイロ計から得た加速度を積分して速度を求め、この速度を積分して位置と角度を求める方式で具現されていることを特徴とする請求項4に記載の移動基準局を利用した車両間相対位置制御システム。
【請求項6】
DGPS補正信号を発信する移動基準局と、この移動基準局からDGPS補正信号を受信して位置制御を行う制御対象車両とが備えられる車両位置制御システムにおいて、
前記移動基準局では、衛星からGPS情報を受信する第1のGPS受信ステップと、
受信されたGPS情報を根拠に移動速度/方向などを参照して現在の位置情報を算出する位置情報算出ステップと、
算出された位置情報と前記第1のGPS受信ステップで受信されたGPS情報とを約定されたアルゴリズムを介し演算してDGPS補正信号を生成するDGPS補正信号生成ステップと、
生成されたDGPS補正信号を送り出すDGPS補正信号送出ステップと、を含み、
前記制御対象車両では、前記DGPS補正信号送出ステップで送り出されたDGPS補正信号を受信する補正信号受信ステップと、
衛星からGPS情報を受信する第2のGPS受信ステップと、
受信されたGPS情報とDGPS補正信号とを根拠に位置情報を算出して位置補正を行う位置情報算出ステップと、
算出ステップで算出された位置情報に従い制御対象車両の速度と方向を調整する走行制御ステップと、
を含むことを特徴とする移動基準局を利用した車両間相対位置制御方法。
【請求項7】
前記第1のGPS受信ステップに先立ち位置換算の基準となる最初の基準点を入力する基準点入力ステップをさらに備え、
前記位置情報算出ステップでは、前記基準点入力ステップで入力された最初の基準点を根拠に移動基準局の絶対位置を算出することを特徴とする請求項6に記載の移動基準局を利用した車両間相対位置制御方法。
【請求項8】
前記移動基準局を先導車両にして、
少なくとも一つ以上の制御対象車両を前記先導車両の追従車両に編制し、
前記先導車両が前記追従車両の相対位置を制御することを特徴とする請求項6に記載の移動基準局を利用した車両間相対位置制御方法。
【請求項9】
前記位置情報算出ステップは、内蔵された振子の3次元空間内での自在な動きを根拠に回転慣性を測定することのできるジャイロ計と加速度計、そして方位角を測定することのできる地磁界を軸に移動基準局の動きを測定することを特徴とする請求項6に記載の移動基準局を利用した車両間相対位置制御方法。
【請求項10】
前記位置情報算出ステップは、前記ジャイロ計から得た加速度を積分して速度を求め、この速度を積分して位置と角度を求める方式で具現されていることを特徴とする請求項9に記載の移動基準局を利用した車両間相対位置制御方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−101100(P2013−101100A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2012−188282(P2012−188282)
【出願日】平成24年8月29日(2012.8.29)
【出願人】(591251636)現代自動車株式会社 (1,064)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成24年8月29日(2012.8.29)
【出願人】(591251636)現代自動車株式会社 (1,064)
【Fターム(参考)】
[ Back to top ]