
移動対象に対するコンピュータ画像の空間及び時間解像度を上げる方法及びシステム
画像再構成を用いて画像の解像度を上げる方法が提供される。上記方法は、対象物のスキャンデータを獲得し、スキャンデータの現在の画像推定を順投影して、計算された投影データを生成することを含む。上記方法はさらに、スキャンデータ及び計算された投影データに対してデータフィット項及び正則化項を適用し、時空間情報に適合するようにデータフィット項及び正則化項を修正して、スキャンデータ及び計算された投影データから再構成された画像を形成することを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像再構成に関し、特に、再構成画像の時間解像度及び空間解像度の両方を上げることに関する。
【背景技術】
【0002】
CT心臓撮影は、CT撮影において、近年、最も進歩している技術の1つである。しかしながら、既知のCT心臓撮影方法の少なくとも幾つかは、CTスキャン中の心臓の動きにより、制限されている。そのようなものとして、心臓の動きが最小の時に、CTデータを収集することを必須とするものがある。それゆえ、既知のCT心臓撮影方法の少なくとも幾つかは、心臓の拍動サイクルの特定位相に対応する狭い時間ウィンドウ内にデータを集める。
【発明の概要】
【発明が解決しようとする課題】
【0003】
特に、既知のCT心臓撮影方法の幾つかでは、フィルタ補正逆投影(FBP)画像再構成が、十分に広い角度幅にわたる投影データを再構成するために使用される。その投影データは、対応するデータセットの各フレームymが再構成されるように、測定された投影のLデータセットにグループ化され、又はまとめられる。例えば、L=2なら、第1のデータセットz1は{y1.....yM/2}であり、第2のデータセットz2は{yM/2+1.....yM}であり、そこで、Mは投影ビューの総数を示す。通常、データセットz1及びz2は、EKG信号に基づいて定義される。その結果、フレームf1は、データセットz1に再構成され、フレームf2は、データセットz2に再構成される。そのように、心臓の画像が心臓の拍動サイクルの各位相に対して再構成されうる。さらに、反復再構成法は、データセットz1からf1を再構成し、データセットz2からf2を再構成するために使用されうる。しかしながら、そのようにグループ化されたデータセットに対する反復再構成を使用することは、FBPに関連する時間解像度を向上させない。データセット{zl}を定義するグループ化によっては、時間解像度が決定されるからである。特に、従来の反復方法及びFBP法は、完全な又はほぼ完全な投影ビューのセットを要求し、これは、より長い時間間隔をしばしば要求し、その長い時間間隔で対象が移動することが生じうる。
【課題を解決するための手段】
【0004】
1つの形態においては、画像再構成を用いて画像の解像度を上げる方法が提供される。上記方法は、対象物のスキャンデータを獲得し、スキャンデータの現在の画像推定を順投影して、計算された投影データを生成することを含む。上記方法はさらに、スキャンデータ及び計算された投影データに対してデータフィット項及び正則化項を適用し、時空間情報に適合するようにデータフィット項及び正則化項を修正して、スキャンデータ及び計算された投影データから再構成された画像を形成すること、を含む。
【0005】
別な形態においては、画像を再構成するためのシステムが提供される。上記システムは、対象物のスキャンデータを獲得し、スキャンデータの現在の画像推定を順投影して、計算された投影データを生成し、スキャンデータ及び計算された投影データに対してデータフィット項及び正則化項を適用し、時空間情報に適合するようにデータフィット項及び正則化項を修正して、スキャンデータ及び計算された投影データから再構成された画像を形成するように構成されるプロセッサを有する。
【0006】
追加の形態においては、心臓の画像を再構成するためのシステムが提供される。上記システムは、心臓のスキャンデータを獲得し、スキャンデータの現在の画像推定を順投影して、計算された投影データを生成し、スキャンデータ及び計算された投影データに対してデータフィット項及び正則化項を適用し、時空間情報に適合するようにデータフィット項及び正則化項を修正して、スキャンデータ及び計算された投影データから再構成された画像を形成するように構成されるプロセッサを有する。
【図面の簡単な説明】
【0007】
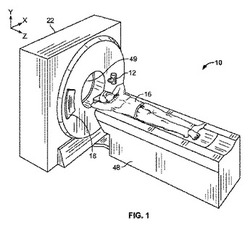
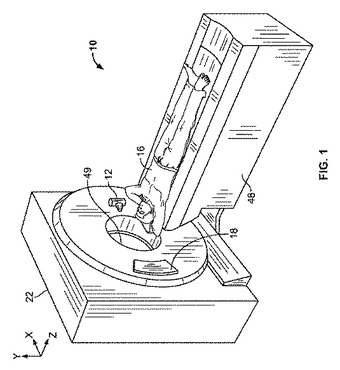
【図1】図1は、コンピュータ断層撮影(CT)システムの実施形態の斜視図である。
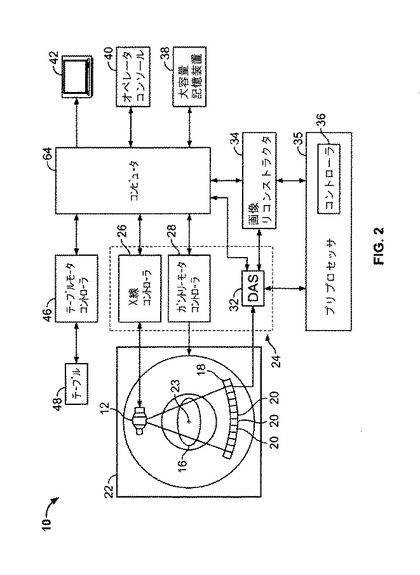
【図2】図2は、図1のCTシステムのブロック図である。
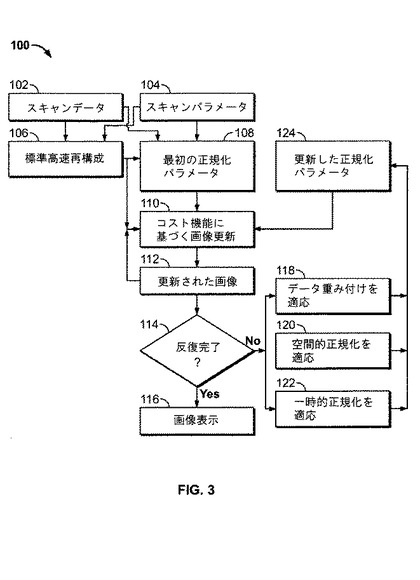
【図3】図3は、画像の解像度を上げる方法の実施形態に係るフローチャートである。
【発明を実施するための形態】
【0008】
図1及び2は、コンピュータ断層撮影システム10の実施形態を説明する。特に、図1は、コンピュータ断層撮影(CT)システム10の実施形態の斜視図であり、図2は、コンピュータ断層撮影(CT)システム10のブロック図である。本発明は、CT撮影システムの用語で記載されるが、当業者により理解されるように、本明細書で記載される方法は、X線コンピュータ断層撮影(X−ray computed tomography)、磁気共鳴画像(magnetic resonance imaging)、単一光子放射型コンピュータ断層撮影(single photon emission computed tomography)、ポジトロン放射断層撮影(positron emission tomography)、又は本明細書に記載される方法を利用可能な他の画像システムを適用してもよい。
【0009】
CT撮影システム10は、ガントリー22及び「第3世代」CTシステムを含む。代替的な実施形態では、CTシステム10は、エネルギー生成、光子計数(PC:Photon Counting)、又は、光子エネルギー弁別型(ED:Energy Discriminating)CT検出システムでもよい。ガントリー22は、検出アレイ18へ向けてX線のビームを投射するX線源12を有する。X線は、患者のような対象16を通過して減衰したX線を生成する。対象16は、Z軸に沿って横たわる。対象16の高さは、Z軸に平行である。検出アレイ18は、複数の検出素子20によって形成され、複数の検出素子20は共に、減衰したX線を検出する。検出アレイ18の列は、X軸に沿って配置され、検出アレイ18の行は、Y軸に沿って配置される。代替的な実施形態では、検出アレイ18の各検出素子20は、光子エネルギー集積型検出器、光子計数、又は光子エネルギー弁別型検出器であってもよい。各検出素子20は、減衰したX線の強度を表す電気信号を出力する。投影データを取得するスキャン中に、ガントリー22及びガントリー22に搭載された部品は、回転中心23の周りを回転する。
【0010】
ガントリー22の回転及びX線源12の操作は、CTシステム10の制御機構24によって管理される。制御機構24は、X線源12に電力及びタイミング信号を供給するX線コントローラ26と、ガントリー22の回転速度及び位置を制御するガントリーモータコントローラ28を含む。制御機構24内のデータ取得システム(DAS)32は、検出素子20から投影データをサンプリングして、デジタル化すると共に、投影データを、次処理のためのサンプリング化されデジタル化された投影データに変換する。
【0011】
コントローラ36を含むプレプロセッサ35は、DAS32からサンプリング化されデジタル化された投影データを受け取って、サンプリング化されデジタル化された投影データを前処理する。一実施形態では、前処理は、限定するものではないが、オフセット補正、一次速度補正(primary speed correction)、参照チャネル補正、及び大気補正(air−calibration)を含む。本明細書で使用されるように、コントローラという用語は、当該技術分野でコントローラとして呼ばれるまさにそのような集積回路に限定されず、もっと広く、プロセッサ、マイクロプロセッサ、マイクロコントローラ、プログラマブルロジックコントローラ、アプリケーションスペシフィック集積回路、及び他のプログラム可能な全ての回路を言い、それらの用語は、本明細書で殆ど同じ意味で使用される。プレプロセッサ35は、サンプリングされ、デジタル化された投影データを前処理して、前処理された投影データを生成する。
【0012】
画像リコンストラクタ34は、前処理された投影データをプレプロセッサ25から受け取り、画像を再構成して、CT画像を生成する。CT画像は、コンピュータ64に入力として転送され、大容量記憶装置38に格納される。本明細書で使用される用語「コンピュータ」及び「画像リコンストラクタ」の各々は、当該技術分野でコンピュータとして呼ばれるまさにそのような集積回路に限定されず、もっと広く、プロセッサ、マイクロコントローラ、コントローラ、プログラマブルロジックコントローラ、アプリケーションスペシフィック集積回路、プログラマブルロジックアレイ(FPGA)、及び他のプログラム可能な全ての回路を言い、それらの用語は、本明細書で殆ど同じ意味で使用される。X線コントローラ26は、CT画像の品質に基づいて、X線源12内の管電流を調整する。
【0013】
コンピュータ64は、また、例えばオペレータであるユーザから、ユーザインタフェースデバイスのあるコンソール40を介してコマンド及びスキャンパラメータを受け取る。例えばオペレータであるユーザは、モニタのようなディスプレイ42によって、コンピュータ64からのCT画像及び他のデータを観察することができる。コンピュータ64は、コマンド及びスキャニングパラメータを使用して、DAS32、X線コントローラ26、及びガントリーモータコントローラ28に制御信号及び情報を出力する。加えて、コンピュータ64は、テーブルモータコントローラ46を操作して、ガントリー22内の対象16を位置決めし、動かすためのモータの付いたテーブル48を制御する。特に、テーブルモータコントローラ46は、テーブル48を制御して、ガントリー開口49を通して対象16の部分を動かし、対象16を中心に配置する。
【0014】
代替の実施形態では、高周波電磁エネルギーを対象16に対して放射するように構成される高周波数電磁エネルギー投影源は、X線源12の代わりに使用される。ガントリーに配置され、高周波電磁エネルギーを検出するように構成される検出器アレイは、検出アレイ18の代わりに使用されてもよい。
【0015】
また、本明細書で使用されるように、画像再構成は、対象の密度測定値をフィルタリングするシステム及び方法の実施形態を排除することを意図しておらず、そこでは、画像を表すデータが生成されるが、視認可能な画像は生成されない。画像の密度測定値をフィルタリングするシステム及び方法の多くの実施形態は、少なくとも1つの視認可能な画像を生成し、又は、少なくとも1つの視認可能な画像を生成するように構成される。
【0016】
図3は、画像解像度を上げる方法に係る実施例のフローチャート100である。特に、図3は、データフィット項、時間解像度項、及び空間解像度項を心臓CTスキャンの間に取得したデータに適用することによって、反復再構成間のコスト関数を最小化することで心臓CTスキャンの時間的及び空間的解像度を上げる方法100のフローチャートである。当業者であれば認識するように、心臓CT撮影に関して本発明を説明する一方で、説明される方法はさらに他の対象のCT撮影にも適用されうる。さらに、当業者であれば認識するように、本発明は、X線コンピュータ断層撮影、核磁気共鳴、単一光子放射型コンピュータ断層撮影、ポジトロン放射断層撮影、又は明細書に記載される方法を利用可能な他の画像システムを適用してもよい。
【0017】
図2及び図3を参照すると、コンピュータ64は、スキャンデータ102を取得する。典型的な実施形態では、スキャンデータは、CT投影ビューのM数を含む。代替的な実施形態では、スキャンデータは、SPECT投影ビューのM数、MRIのk空間のデータのM部分の少なくとも1つ、又はポジトロン放射断層撮影におけるコインシデンスイベントのM数を含む。さらに、取得スキャンデータ102の取得は、連続180°プラス心臓扇角度及び180°未満の心臓扇角度の少なくとも1つを用いて取得することを含んでもよい。さらに、コーンビームスキャンデータが取得される。そのようなものとして、本明細書で説明される方法は、単一のセクタ又は分割された画像再構成に適用されてもよく、そこでは、1つの心拍からのデータが、画像を再構成するために使用される。さらに、同じ方法が複数セクタの再構成に適用されてもよく、そこでは、複数心拍からのデータが、補足的な角度を提供して、より高い時間解像度で心臓の特有の位相で画像を再構成する。
【0018】
取得データは、システムによって記録されるyM投影を通したylを含む。典型的な実施形態では、スキャンパラメータ104の所定セットがコンピュータ64にプログラムされており、再構成される取得画像データのパラメータを決定づける。例えば、1スライスに付き1000検出チャネルを有する64スライススキャナ、及び1回転に付き980投影ビューにとっては、一実施形態においては、各ymは、64,000エレメント長のベクトルであり、M用の典型的な値は、980の倍数である。具体的に言うと、Mは、回転時間及び回転数につき980投影ビューに等しい。対象(即ち、患者の胸及び心臓)が、スキャンを通して連続的に変化するが、実際には、再構成は、心拍の位相の全てに渡る胸及び心臓の写真の幾つかの「スナップショット」や「フレーム」を用いて取得される。「スナップショット」や「フレーム」は、測定された投影データから再構成されるべき画像フレームLを意味するf1からfLとすることによって、グループ化される。典型的な実施形態では、各フレームは、512x512x200ボリュームであり、Lは2〜16フレームの間である。それゆえ、各flは、約512x512x200エレメント長のベクトルであってもよい。
【0019】
スキャンパラメータ104は、(FBPのような)標準高速再構成(standard fast reconstruction)106の間に、スキャンデータ102と共に使用される。その結果、標準高速再構成106、スキャンデータ102、及びスキャンパラメータ104の出力は、最初の正則化パラメータ108を計算して、画像データを正則化するために使用される。特に、最初の正則化パラメータは、空間−時間データ重み付けファクタwml、時間正則化パラメータtlj、及び空間正則化パラメータsjkを含む。最初の正則化パラメータ108は、画像再構成の開始前に前決定され、データフィット項、時間正則化項、及び空間正則化項の3つの項から成るコスト関数110を最小化することによって画像を再構成するために使用される。数学的には、最小化は、次のように表現される。
【0020】
【数1】

【0021】
ここで、f=(f1,...,fL)及びD(f)は、データフィット項を表し、T(f)は時間正則化項を表し、及びS(f)は空間正則化項をそれぞれ表す。
【0022】
典型的な実施形態では、データフィット項は、次のように重み付けされる。
【0023】
【数2】
【0024】
ここで、Amはシステムモデル又は順投影作用素(operator)を意味し、d(ym,Amfl)は測定された投影データymと、投影され又は再投影されたAmflとの間の距離の測定値を意味する。一実施形態では、d(ym,Amfl)は、既知の統計データは、ポワソン、ガウシアン、又は複合ポアソン分布、又はそれらの組み合わせを少なくとも1つ含む。
【0025】
さらに、典型的な実施形態では、空間正則化項は次のように重み付けされる。
【0026】
【数3】
【0027】
ここで、p(・)は第1「ポテンシャル関数」を意味し、「ポテンシャル関数」は、例えば、フーバー関数又は二次関数であるがこれに限らず、当該技術分野において既知でり、Jは各画像のボクセルを意味する。典型的な実施形態では、時間正則化パラメータtljは、時間解像度を上げるために選択される。
【0028】
さらに、典型的な実施形態では、空間正則化項は、次のように重み付けられる。
【0029】
【数4】
【0030】
ここで、Kは、各画像が近接する空間の数を意味し、nkは、k番目の近接空間の相対指数を意味し、p(・)は第2の「ポテンシャル関数」を意味し、例えば、当該技術分野において既知であるフーバー関数又は二次関数があるがこれに限らない。典型的な実施形態では、空間正則化パラメータSjkは、空間解像度を上げるために選択される。
【0031】
コスト関数110を最小化するために、更新済み画像112は生成される。それから、コンピュータ64は、再構成の全ての反復が完了したかどうかを判断する。反復が完成したなら、再構成画像がディスプレイ42に表示される116。反復が完了していないなら、最初の正則化パラメータはコンピュータ64によって調整され、コスト関数110に再適用されて、画像が更新される。
【0032】
特に、典型的な実施形態では、空間−時間データ重み付け要素は、心拍位相lに関連する心拍サイクルに同調する投影データmに基づいて調整されて118、位相重み付け反復再構成という結果になる。典型的な実施形態では、wmlは、時間解像度を上げるように、順応して選択される。特に、wmlは、現状の画像からの投影されたデータが、どのように、投影ビューymと一致するかに基づいて調整される。代替的な実施形態では、他の検討、例えば、データがスキャンされた対象の動的部分に対応するかどうかがwmlを選択するために使用されるが、この検討に制限されない。加えて、Amは、心臓の運動の状態に基づいて動的に調整される。特に、順投影の間に、既知の心臓の動きに基づいて行列が動的に「ゆがみ」うる。そのような既知の心臓の動きは、例えば、より早期の再構成(recons)又は他のセンサ又はイメージャー(imager)から決定される運動ベクトルであるがこれに限らない。さらに、多くの反復の後で、心臓の動きの中間推定が、システムモデルAmを適合するために使用することができ、このシステムモデルAmは、次に続くさらなる(改良された)繰り返しに従う。
【0033】
さらに、典型的な実施形態では、空間正則化パラメータSjkが、ボクセル値が時間とともにどのように変化するかに基づいて、適応的に調整される(120)。例えば、心臓壁から離れた画像領域に対応するj値によってインデックス付けされるボクセルには、より少ない動きが予想される。それゆえ、そのような領域における正則化パラメータ用のより大きな値が、使用される。さらに、心臓壁に近い画像領域に対応するj値によってインデックス付けされるボクセルには、より大きい動きが予想される。それゆえ、そのような領域における正則化パラメータ用により小さな値が、そのような領域における空間解像度を最大化するために使用される。例えば、Sjk=exp(−adj)が設定される。ここでは、djは、心臓壁からj番目のボクセルからの距離を意味し、aは経験的に選択されたチューニングパラメータである。さらに、心臓周期(拡張末期又は収縮末期)の静止部分に対応するl画像フレームには、心臓が素早く動く時間フレームと比較して、より大きな正則化パラメータが使用される。
【0034】
さらに、典型的な実施形態では、時間正則化パラメータが、空間位置及びボクセルの時間特性のような事項に基づいて、順応して調整される(122)。さらに具体的には、心臓部内のボクセルインデックスjにとって、時間正則化パラメータのより小さな値が、そのような領域の画像品質を最大化するために使用される。さらに、心臓から離れた領域では、時間正則化パラメータのより大きな値が、再構成画像におけるノイズを減らすために使用される。
【0035】
代替的な実施形態では、他の検討が、時間正則化パラメータを選択的に適用するためになされ、例えば、正則化パラメータの設計を導くために、ECG信号(又は、いわゆる擬似ECG信号)を使用されるが、この検討に限らない。そのようなものとして、ECGベクトルの形状が分析され、ECG信号内に反映される患者の心臓の動きの特性を十分に活用するように、心臓の動きの状態が決定され、又は、評価される。特に、正則化パラメータは、空間的にも時間的にも適合させられる。
【0036】
調整されたパラメータ124は、コスト関数(110)に再度利用され、さらに画像を更新する(112)。正則化パラメータ(118、120、122)を調整するプロセスは、画像の全反復が完了して、最後の画像116が表示されるまで、繰り返される。
【0037】
上記空間及び時間正則化項では、当該技術分野で既知のように、上述された一次の差の変わりに、より高次の差が使用されてもよい。
【0038】
反復再構成では、複数回の反復がコスト関数を最適化するために必要になる。動作マップがないとき、最適化プロセスの中間結果が、動作パラメータを調整又は推定するためにさらに使用される。例えば、全反復の最後に、心臓サイクルの異なる位相で再構成される画像間の差異が、動作方向についての空間及び時間情報を提供してもよい。そのようなものとして、正則化パラメータは、動き方向に沿って少なく、そして、直角方向にそって多く、平滑になるように調整される。
【0039】
一実施形態では、画像再構成の解像度を上げる方法が提供される。上記方法は、画像再対象物のスキャンデータを獲得し、スキャンデータの現在の画像推定を順投影して、計算された投影データを生成することを含む。上記方法はさらに、スキャンデータ及び計算された投影データに対してデータフィット項及び正則化項を適用し、時空間情報に適合するようにデータフィット項及び正則化項を修正して、スキャンデータ及び計算された投影データから再構成された画像を形成すること、を含む。一実施形態では、上記方法はさらに、式f^=argminfD(f)+T(f)+S(f)をスキャンデータに適用することをさらに含み、f=(f1,...,fL)であり、Lは再構成される画像フレームの数を表し、D(J)はデータフィット項、T(J)は時間正則化項、及びS(J)は空間正則化項である。
【0040】
典型的実施形態では、上記データフィット項を適用するステップことは、順投影作用素及び時間データ重み付けファクタを含むデータフィット項を適用し、対象物の動きの状態に基づいて、順投影作用素を動的に調整し、且つ、予想画像と投影画像のビューとの間の関係に基づいて時間データ重み付けファクタを順応して選択することをさらに含む。
【0041】
さらに、一実施形態では、少なくとも1つの正則化項を適用することは、画像データの個々のボクセル内の対象物の動きの量に基づいて時間正則化パラメータを順応して選択することをさらに含む。少なくとも1つの正則化項を修正することはさらに、実質的に動きの無いボクセルのためのより大きなパラメータを選択し、実質的な動きのあるボクセルのためのより小さなパラメータを選択することを含む。
【0042】
さらに、別な実施形態では、正則化項を適用することはさらに、対象物への個々のボクセルからの距離に基づいて空間正則化パラメータを順応して選択することを含む。少なくとも1つの正則化項を修正することはさらに、対象物の実質的に内部のボクセルのためのより大きなパラメータを選択し、対象物の実質的に外部のボクセルのためのより小さなパラメータを選択することをさらに含む。
【0043】
本明細書で使用されるように、単数で記載された構成要素又はステップは、排除が明確に記載されないなら、複数の構成要素又はステップを排除するように理解されるべきではない。さらに、本発明の「1つの実施形態」という言及は、記載される特徴を組み込む代替的な実施形態の存在を排除するように解釈することを意図したものではない。
【0044】
画像を再構成する上記方法は、向上した時間及び空間解像度の両方を有する移動オブジェクトの再構成画像を提供することを可能にする。上記方法は、全ての反復の後で、時間及び空間パラメータの両方を正則化することを含む。結果として、上述した方法は、先行技術の方法と比較して、改良された画像品質を提供することを可能にする。
【0045】
本明細書で記載された方法及びシステムは、心臓CT画像再構成の文脈において記載されたが、本明細書で記載された方法及びシステムは、コンピュータ断層撮影に限らない。同様に、記載された方法は、心臓画像に限らず、移動する又は静的ないかなる対象の画像も再構成するように使用することができる。
【0046】
本発明は、様々な特有の実施形態に関して記載された一方で、当業者であれば、本発明は、請求の範囲及び精神の範囲内で変形することが可能であることを理解するであろう。
【技術分野】
【0001】
本発明は、画像再構成に関し、特に、再構成画像の時間解像度及び空間解像度の両方を上げることに関する。
【背景技術】
【0002】
CT心臓撮影は、CT撮影において、近年、最も進歩している技術の1つである。しかしながら、既知のCT心臓撮影方法の少なくとも幾つかは、CTスキャン中の心臓の動きにより、制限されている。そのようなものとして、心臓の動きが最小の時に、CTデータを収集することを必須とするものがある。それゆえ、既知のCT心臓撮影方法の少なくとも幾つかは、心臓の拍動サイクルの特定位相に対応する狭い時間ウィンドウ内にデータを集める。
【発明の概要】
【発明が解決しようとする課題】
【0003】
特に、既知のCT心臓撮影方法の幾つかでは、フィルタ補正逆投影(FBP)画像再構成が、十分に広い角度幅にわたる投影データを再構成するために使用される。その投影データは、対応するデータセットの各フレームymが再構成されるように、測定された投影のLデータセットにグループ化され、又はまとめられる。例えば、L=2なら、第1のデータセットz1は{y1.....yM/2}であり、第2のデータセットz2は{yM/2+1.....yM}であり、そこで、Mは投影ビューの総数を示す。通常、データセットz1及びz2は、EKG信号に基づいて定義される。その結果、フレームf1は、データセットz1に再構成され、フレームf2は、データセットz2に再構成される。そのように、心臓の画像が心臓の拍動サイクルの各位相に対して再構成されうる。さらに、反復再構成法は、データセットz1からf1を再構成し、データセットz2からf2を再構成するために使用されうる。しかしながら、そのようにグループ化されたデータセットに対する反復再構成を使用することは、FBPに関連する時間解像度を向上させない。データセット{zl}を定義するグループ化によっては、時間解像度が決定されるからである。特に、従来の反復方法及びFBP法は、完全な又はほぼ完全な投影ビューのセットを要求し、これは、より長い時間間隔をしばしば要求し、その長い時間間隔で対象が移動することが生じうる。
【課題を解決するための手段】
【0004】
1つの形態においては、画像再構成を用いて画像の解像度を上げる方法が提供される。上記方法は、対象物のスキャンデータを獲得し、スキャンデータの現在の画像推定を順投影して、計算された投影データを生成することを含む。上記方法はさらに、スキャンデータ及び計算された投影データに対してデータフィット項及び正則化項を適用し、時空間情報に適合するようにデータフィット項及び正則化項を修正して、スキャンデータ及び計算された投影データから再構成された画像を形成すること、を含む。
【0005】
別な形態においては、画像を再構成するためのシステムが提供される。上記システムは、対象物のスキャンデータを獲得し、スキャンデータの現在の画像推定を順投影して、計算された投影データを生成し、スキャンデータ及び計算された投影データに対してデータフィット項及び正則化項を適用し、時空間情報に適合するようにデータフィット項及び正則化項を修正して、スキャンデータ及び計算された投影データから再構成された画像を形成するように構成されるプロセッサを有する。
【0006】
追加の形態においては、心臓の画像を再構成するためのシステムが提供される。上記システムは、心臓のスキャンデータを獲得し、スキャンデータの現在の画像推定を順投影して、計算された投影データを生成し、スキャンデータ及び計算された投影データに対してデータフィット項及び正則化項を適用し、時空間情報に適合するようにデータフィット項及び正則化項を修正して、スキャンデータ及び計算された投影データから再構成された画像を形成するように構成されるプロセッサを有する。
【図面の簡単な説明】
【0007】
【図1】図1は、コンピュータ断層撮影(CT)システムの実施形態の斜視図である。
【図2】図2は、図1のCTシステムのブロック図である。
【図3】図3は、画像の解像度を上げる方法の実施形態に係るフローチャートである。
【発明を実施するための形態】
【0008】
図1及び2は、コンピュータ断層撮影システム10の実施形態を説明する。特に、図1は、コンピュータ断層撮影(CT)システム10の実施形態の斜視図であり、図2は、コンピュータ断層撮影(CT)システム10のブロック図である。本発明は、CT撮影システムの用語で記載されるが、当業者により理解されるように、本明細書で記載される方法は、X線コンピュータ断層撮影(X−ray computed tomography)、磁気共鳴画像(magnetic resonance imaging)、単一光子放射型コンピュータ断層撮影(single photon emission computed tomography)、ポジトロン放射断層撮影(positron emission tomography)、又は本明細書に記載される方法を利用可能な他の画像システムを適用してもよい。
【0009】
CT撮影システム10は、ガントリー22及び「第3世代」CTシステムを含む。代替的な実施形態では、CTシステム10は、エネルギー生成、光子計数(PC:Photon Counting)、又は、光子エネルギー弁別型(ED:Energy Discriminating)CT検出システムでもよい。ガントリー22は、検出アレイ18へ向けてX線のビームを投射するX線源12を有する。X線は、患者のような対象16を通過して減衰したX線を生成する。対象16は、Z軸に沿って横たわる。対象16の高さは、Z軸に平行である。検出アレイ18は、複数の検出素子20によって形成され、複数の検出素子20は共に、減衰したX線を検出する。検出アレイ18の列は、X軸に沿って配置され、検出アレイ18の行は、Y軸に沿って配置される。代替的な実施形態では、検出アレイ18の各検出素子20は、光子エネルギー集積型検出器、光子計数、又は光子エネルギー弁別型検出器であってもよい。各検出素子20は、減衰したX線の強度を表す電気信号を出力する。投影データを取得するスキャン中に、ガントリー22及びガントリー22に搭載された部品は、回転中心23の周りを回転する。
【0010】
ガントリー22の回転及びX線源12の操作は、CTシステム10の制御機構24によって管理される。制御機構24は、X線源12に電力及びタイミング信号を供給するX線コントローラ26と、ガントリー22の回転速度及び位置を制御するガントリーモータコントローラ28を含む。制御機構24内のデータ取得システム(DAS)32は、検出素子20から投影データをサンプリングして、デジタル化すると共に、投影データを、次処理のためのサンプリング化されデジタル化された投影データに変換する。
【0011】
コントローラ36を含むプレプロセッサ35は、DAS32からサンプリング化されデジタル化された投影データを受け取って、サンプリング化されデジタル化された投影データを前処理する。一実施形態では、前処理は、限定するものではないが、オフセット補正、一次速度補正(primary speed correction)、参照チャネル補正、及び大気補正(air−calibration)を含む。本明細書で使用されるように、コントローラという用語は、当該技術分野でコントローラとして呼ばれるまさにそのような集積回路に限定されず、もっと広く、プロセッサ、マイクロプロセッサ、マイクロコントローラ、プログラマブルロジックコントローラ、アプリケーションスペシフィック集積回路、及び他のプログラム可能な全ての回路を言い、それらの用語は、本明細書で殆ど同じ意味で使用される。プレプロセッサ35は、サンプリングされ、デジタル化された投影データを前処理して、前処理された投影データを生成する。
【0012】
画像リコンストラクタ34は、前処理された投影データをプレプロセッサ25から受け取り、画像を再構成して、CT画像を生成する。CT画像は、コンピュータ64に入力として転送され、大容量記憶装置38に格納される。本明細書で使用される用語「コンピュータ」及び「画像リコンストラクタ」の各々は、当該技術分野でコンピュータとして呼ばれるまさにそのような集積回路に限定されず、もっと広く、プロセッサ、マイクロコントローラ、コントローラ、プログラマブルロジックコントローラ、アプリケーションスペシフィック集積回路、プログラマブルロジックアレイ(FPGA)、及び他のプログラム可能な全ての回路を言い、それらの用語は、本明細書で殆ど同じ意味で使用される。X線コントローラ26は、CT画像の品質に基づいて、X線源12内の管電流を調整する。
【0013】
コンピュータ64は、また、例えばオペレータであるユーザから、ユーザインタフェースデバイスのあるコンソール40を介してコマンド及びスキャンパラメータを受け取る。例えばオペレータであるユーザは、モニタのようなディスプレイ42によって、コンピュータ64からのCT画像及び他のデータを観察することができる。コンピュータ64は、コマンド及びスキャニングパラメータを使用して、DAS32、X線コントローラ26、及びガントリーモータコントローラ28に制御信号及び情報を出力する。加えて、コンピュータ64は、テーブルモータコントローラ46を操作して、ガントリー22内の対象16を位置決めし、動かすためのモータの付いたテーブル48を制御する。特に、テーブルモータコントローラ46は、テーブル48を制御して、ガントリー開口49を通して対象16の部分を動かし、対象16を中心に配置する。
【0014】
代替の実施形態では、高周波電磁エネルギーを対象16に対して放射するように構成される高周波数電磁エネルギー投影源は、X線源12の代わりに使用される。ガントリーに配置され、高周波電磁エネルギーを検出するように構成される検出器アレイは、検出アレイ18の代わりに使用されてもよい。
【0015】
また、本明細書で使用されるように、画像再構成は、対象の密度測定値をフィルタリングするシステム及び方法の実施形態を排除することを意図しておらず、そこでは、画像を表すデータが生成されるが、視認可能な画像は生成されない。画像の密度測定値をフィルタリングするシステム及び方法の多くの実施形態は、少なくとも1つの視認可能な画像を生成し、又は、少なくとも1つの視認可能な画像を生成するように構成される。
【0016】
図3は、画像解像度を上げる方法に係る実施例のフローチャート100である。特に、図3は、データフィット項、時間解像度項、及び空間解像度項を心臓CTスキャンの間に取得したデータに適用することによって、反復再構成間のコスト関数を最小化することで心臓CTスキャンの時間的及び空間的解像度を上げる方法100のフローチャートである。当業者であれば認識するように、心臓CT撮影に関して本発明を説明する一方で、説明される方法はさらに他の対象のCT撮影にも適用されうる。さらに、当業者であれば認識するように、本発明は、X線コンピュータ断層撮影、核磁気共鳴、単一光子放射型コンピュータ断層撮影、ポジトロン放射断層撮影、又は明細書に記載される方法を利用可能な他の画像システムを適用してもよい。
【0017】
図2及び図3を参照すると、コンピュータ64は、スキャンデータ102を取得する。典型的な実施形態では、スキャンデータは、CT投影ビューのM数を含む。代替的な実施形態では、スキャンデータは、SPECT投影ビューのM数、MRIのk空間のデータのM部分の少なくとも1つ、又はポジトロン放射断層撮影におけるコインシデンスイベントのM数を含む。さらに、取得スキャンデータ102の取得は、連続180°プラス心臓扇角度及び180°未満の心臓扇角度の少なくとも1つを用いて取得することを含んでもよい。さらに、コーンビームスキャンデータが取得される。そのようなものとして、本明細書で説明される方法は、単一のセクタ又は分割された画像再構成に適用されてもよく、そこでは、1つの心拍からのデータが、画像を再構成するために使用される。さらに、同じ方法が複数セクタの再構成に適用されてもよく、そこでは、複数心拍からのデータが、補足的な角度を提供して、より高い時間解像度で心臓の特有の位相で画像を再構成する。
【0018】
取得データは、システムによって記録されるyM投影を通したylを含む。典型的な実施形態では、スキャンパラメータ104の所定セットがコンピュータ64にプログラムされており、再構成される取得画像データのパラメータを決定づける。例えば、1スライスに付き1000検出チャネルを有する64スライススキャナ、及び1回転に付き980投影ビューにとっては、一実施形態においては、各ymは、64,000エレメント長のベクトルであり、M用の典型的な値は、980の倍数である。具体的に言うと、Mは、回転時間及び回転数につき980投影ビューに等しい。対象(即ち、患者の胸及び心臓)が、スキャンを通して連続的に変化するが、実際には、再構成は、心拍の位相の全てに渡る胸及び心臓の写真の幾つかの「スナップショット」や「フレーム」を用いて取得される。「スナップショット」や「フレーム」は、測定された投影データから再構成されるべき画像フレームLを意味するf1からfLとすることによって、グループ化される。典型的な実施形態では、各フレームは、512x512x200ボリュームであり、Lは2〜16フレームの間である。それゆえ、各flは、約512x512x200エレメント長のベクトルであってもよい。
【0019】
スキャンパラメータ104は、(FBPのような)標準高速再構成(standard fast reconstruction)106の間に、スキャンデータ102と共に使用される。その結果、標準高速再構成106、スキャンデータ102、及びスキャンパラメータ104の出力は、最初の正則化パラメータ108を計算して、画像データを正則化するために使用される。特に、最初の正則化パラメータは、空間−時間データ重み付けファクタwml、時間正則化パラメータtlj、及び空間正則化パラメータsjkを含む。最初の正則化パラメータ108は、画像再構成の開始前に前決定され、データフィット項、時間正則化項、及び空間正則化項の3つの項から成るコスト関数110を最小化することによって画像を再構成するために使用される。数学的には、最小化は、次のように表現される。
【0020】
【数1】
【0021】
ここで、f=(f1,...,fL)及びD(f)は、データフィット項を表し、T(f)は時間正則化項を表し、及びS(f)は空間正則化項をそれぞれ表す。
【0022】
典型的な実施形態では、データフィット項は、次のように重み付けされる。
【0023】
【数2】
【0024】
ここで、Amはシステムモデル又は順投影作用素(operator)を意味し、d(ym,Amfl)は測定された投影データymと、投影され又は再投影されたAmflとの間の距離の測定値を意味する。一実施形態では、d(ym,Amfl)は、既知の統計データは、ポワソン、ガウシアン、又は複合ポアソン分布、又はそれらの組み合わせを少なくとも1つ含む。
【0025】
さらに、典型的な実施形態では、空間正則化項は次のように重み付けされる。
【0026】
【数3】
【0027】
ここで、p(・)は第1「ポテンシャル関数」を意味し、「ポテンシャル関数」は、例えば、フーバー関数又は二次関数であるがこれに限らず、当該技術分野において既知でり、Jは各画像のボクセルを意味する。典型的な実施形態では、時間正則化パラメータtljは、時間解像度を上げるために選択される。
【0028】
さらに、典型的な実施形態では、空間正則化項は、次のように重み付けられる。
【0029】
【数4】
【0030】
ここで、Kは、各画像が近接する空間の数を意味し、nkは、k番目の近接空間の相対指数を意味し、p(・)は第2の「ポテンシャル関数」を意味し、例えば、当該技術分野において既知であるフーバー関数又は二次関数があるがこれに限らない。典型的な実施形態では、空間正則化パラメータSjkは、空間解像度を上げるために選択される。
【0031】
コスト関数110を最小化するために、更新済み画像112は生成される。それから、コンピュータ64は、再構成の全ての反復が完了したかどうかを判断する。反復が完成したなら、再構成画像がディスプレイ42に表示される116。反復が完了していないなら、最初の正則化パラメータはコンピュータ64によって調整され、コスト関数110に再適用されて、画像が更新される。
【0032】
特に、典型的な実施形態では、空間−時間データ重み付け要素は、心拍位相lに関連する心拍サイクルに同調する投影データmに基づいて調整されて118、位相重み付け反復再構成という結果になる。典型的な実施形態では、wmlは、時間解像度を上げるように、順応して選択される。特に、wmlは、現状の画像からの投影されたデータが、どのように、投影ビューymと一致するかに基づいて調整される。代替的な実施形態では、他の検討、例えば、データがスキャンされた対象の動的部分に対応するかどうかがwmlを選択するために使用されるが、この検討に制限されない。加えて、Amは、心臓の運動の状態に基づいて動的に調整される。特に、順投影の間に、既知の心臓の動きに基づいて行列が動的に「ゆがみ」うる。そのような既知の心臓の動きは、例えば、より早期の再構成(recons)又は他のセンサ又はイメージャー(imager)から決定される運動ベクトルであるがこれに限らない。さらに、多くの反復の後で、心臓の動きの中間推定が、システムモデルAmを適合するために使用することができ、このシステムモデルAmは、次に続くさらなる(改良された)繰り返しに従う。
【0033】
さらに、典型的な実施形態では、空間正則化パラメータSjkが、ボクセル値が時間とともにどのように変化するかに基づいて、適応的に調整される(120)。例えば、心臓壁から離れた画像領域に対応するj値によってインデックス付けされるボクセルには、より少ない動きが予想される。それゆえ、そのような領域における正則化パラメータ用のより大きな値が、使用される。さらに、心臓壁に近い画像領域に対応するj値によってインデックス付けされるボクセルには、より大きい動きが予想される。それゆえ、そのような領域における正則化パラメータ用により小さな値が、そのような領域における空間解像度を最大化するために使用される。例えば、Sjk=exp(−adj)が設定される。ここでは、djは、心臓壁からj番目のボクセルからの距離を意味し、aは経験的に選択されたチューニングパラメータである。さらに、心臓周期(拡張末期又は収縮末期)の静止部分に対応するl画像フレームには、心臓が素早く動く時間フレームと比較して、より大きな正則化パラメータが使用される。
【0034】
さらに、典型的な実施形態では、時間正則化パラメータが、空間位置及びボクセルの時間特性のような事項に基づいて、順応して調整される(122)。さらに具体的には、心臓部内のボクセルインデックスjにとって、時間正則化パラメータのより小さな値が、そのような領域の画像品質を最大化するために使用される。さらに、心臓から離れた領域では、時間正則化パラメータのより大きな値が、再構成画像におけるノイズを減らすために使用される。
【0035】
代替的な実施形態では、他の検討が、時間正則化パラメータを選択的に適用するためになされ、例えば、正則化パラメータの設計を導くために、ECG信号(又は、いわゆる擬似ECG信号)を使用されるが、この検討に限らない。そのようなものとして、ECGベクトルの形状が分析され、ECG信号内に反映される患者の心臓の動きの特性を十分に活用するように、心臓の動きの状態が決定され、又は、評価される。特に、正則化パラメータは、空間的にも時間的にも適合させられる。
【0036】
調整されたパラメータ124は、コスト関数(110)に再度利用され、さらに画像を更新する(112)。正則化パラメータ(118、120、122)を調整するプロセスは、画像の全反復が完了して、最後の画像116が表示されるまで、繰り返される。
【0037】
上記空間及び時間正則化項では、当該技術分野で既知のように、上述された一次の差の変わりに、より高次の差が使用されてもよい。
【0038】
反復再構成では、複数回の反復がコスト関数を最適化するために必要になる。動作マップがないとき、最適化プロセスの中間結果が、動作パラメータを調整又は推定するためにさらに使用される。例えば、全反復の最後に、心臓サイクルの異なる位相で再構成される画像間の差異が、動作方向についての空間及び時間情報を提供してもよい。そのようなものとして、正則化パラメータは、動き方向に沿って少なく、そして、直角方向にそって多く、平滑になるように調整される。
【0039】
一実施形態では、画像再構成の解像度を上げる方法が提供される。上記方法は、画像再対象物のスキャンデータを獲得し、スキャンデータの現在の画像推定を順投影して、計算された投影データを生成することを含む。上記方法はさらに、スキャンデータ及び計算された投影データに対してデータフィット項及び正則化項を適用し、時空間情報に適合するようにデータフィット項及び正則化項を修正して、スキャンデータ及び計算された投影データから再構成された画像を形成すること、を含む。一実施形態では、上記方法はさらに、式f^=argminfD(f)+T(f)+S(f)をスキャンデータに適用することをさらに含み、f=(f1,...,fL)であり、Lは再構成される画像フレームの数を表し、D(J)はデータフィット項、T(J)は時間正則化項、及びS(J)は空間正則化項である。
【0040】
典型的実施形態では、上記データフィット項を適用するステップことは、順投影作用素及び時間データ重み付けファクタを含むデータフィット項を適用し、対象物の動きの状態に基づいて、順投影作用素を動的に調整し、且つ、予想画像と投影画像のビューとの間の関係に基づいて時間データ重み付けファクタを順応して選択することをさらに含む。
【0041】
さらに、一実施形態では、少なくとも1つの正則化項を適用することは、画像データの個々のボクセル内の対象物の動きの量に基づいて時間正則化パラメータを順応して選択することをさらに含む。少なくとも1つの正則化項を修正することはさらに、実質的に動きの無いボクセルのためのより大きなパラメータを選択し、実質的な動きのあるボクセルのためのより小さなパラメータを選択することを含む。
【0042】
さらに、別な実施形態では、正則化項を適用することはさらに、対象物への個々のボクセルからの距離に基づいて空間正則化パラメータを順応して選択することを含む。少なくとも1つの正則化項を修正することはさらに、対象物の実質的に内部のボクセルのためのより大きなパラメータを選択し、対象物の実質的に外部のボクセルのためのより小さなパラメータを選択することをさらに含む。
【0043】
本明細書で使用されるように、単数で記載された構成要素又はステップは、排除が明確に記載されないなら、複数の構成要素又はステップを排除するように理解されるべきではない。さらに、本発明の「1つの実施形態」という言及は、記載される特徴を組み込む代替的な実施形態の存在を排除するように解釈することを意図したものではない。
【0044】
画像を再構成する上記方法は、向上した時間及び空間解像度の両方を有する移動オブジェクトの再構成画像を提供することを可能にする。上記方法は、全ての反復の後で、時間及び空間パラメータの両方を正則化することを含む。結果として、上述した方法は、先行技術の方法と比較して、改良された画像品質を提供することを可能にする。
【0045】
本明細書で記載された方法及びシステムは、心臓CT画像再構成の文脈において記載されたが、本明細書で記載された方法及びシステムは、コンピュータ断層撮影に限らない。同様に、記載された方法は、心臓画像に限らず、移動する又は静的ないかなる対象の画像も再構成するように使用することができる。
【0046】
本発明は、様々な特有の実施形態に関して記載された一方で、当業者であれば、本発明は、請求の範囲及び精神の範囲内で変形することが可能であることを理解するであろう。
【特許請求の範囲】
【請求項1】
画像再構成を用いて画像の解像度を上げる方法であって、
対象物のスキャンデータを獲得し、
前記スキャンデータの現在の画像推定を順投影して、計算された投影データを生成し、
前記スキャンデータ及び前記計算された投影データに対してデータフィット項及び正則化項を適用し、
時空間情報に適合するように前記データフィット項及び前記正則化項を修正して、前記スキャンデータ及び前記計算された投影データから再構成された画像を形成すること、を有する方法。
【請求項2】
式f^=argminfD(f)+T(f)+S(f)を前記スキャンデータに適用することをさらに有し、f=(f1,...,fL)であり、Lは再構成される画像フレームの数を表し、D(J)はデータフィット項、T(J)は時間正則化項、及びS(J)は空間正則化項である、請求項1に記載の方法。
【請求項3】
前記データフィット項を適用することは、
順投影作用素及び時間データ重み付けファクタを含むデータフィット項を適用し、
前記対象物の動きの状態に基づいて、前記順投影作用素を動的に調整し、且つ、
予想画像と投影画像のビューとの間の関係に基づいて時間データ重み付けファクタを順応して選択することをさらに有する、請求項1に記載の方法。
【請求項4】
前記正則化項を適用することは、前記画像データの個々のボクセル内の対象物の動きの量に基づいて時間正則化パラメータを順応して選択することをさらに有する請求項1に記載の方法。
【請求項5】
前記正則化項を修正することはさらに、実質的に動きの無いボクセルのためのより大きなパラメータを選択し、実質的な動きのあるボクセルのためのより小さなパラメータを選択することを有する、請求項4に記載の方法。
【請求項6】
前記正則化項を適用することはさらに、前記対象物への個々のボクセルからの距離に基づいて空間正則化パラメータを順応して選択することを有する、請求項1に記載の方法。
【請求項7】
前記正則化項を修正することはさらに、前記対象物の実質的に内部のボクセルのためのより大きなパラメータを選択し、前記対象物の実質的に外部のボクセルのためのより小さなパラメータを選択することをさらに有する、請求項6に記載の方法。
【請求項8】
対象物のスキャンデータを獲得し、
前記スキャンデータの現在の画像推定を順投影して、計算された投影データを生成し、
前記スキャンデータ及び前記計算された投影データに対してデータフィット項及び正則化項を適用し、
時空間情報に適合するように前記データフィット項及び前記正則化項を修正して、前記スキャンデータ及び前記計算された投影データから再構成された画像を形成するように構成されるプロセッサを有する、画像を再構成するためのシステム。
【請求項9】
式f^=argminfD(f)+T(f)+S(f)を前記スキャンデータに適用することであって、f=(f1,...,fi)は、再構成される画像フレームの数Lを表し、D(J)はデータフィット項、T(J)は時間正則化項、及びS(J)は空間正則化項であることをさらに有する、請求項8に記載のシステム。
【請求項10】
前記プロセッサはさらに、
順投影作用素及び時間データ重み付けファクタを含むデータフィット項を適用し、
対象物の動きの状態に基づいて、前記順投影作用素を動的に調整し、且つ、
予想される画像と投影される画像のビューとの間の関係に基づいて時間的なデータ重み付けファクタを順応して選択するように構成される、請求項8に記載のシステム。
【請求項11】
前記プロセッサはさらに、
前記画像データの個々のボクセル内の対象物の動きの量に基づいて時間正則化パラメータを順応して選択することによって、前記正則化項を適用するように構成される請求項8に記載のシステム。
【請求項12】
前記プロセッサはさらに、
実質的に動きの無いボクセルのためのより大きなパラメータを選択し、実質的な動きのあるボクセルのためのより小さなパラメータを選択することを有する、請求項11に記載のシステム。
【請求項13】
前記プロセッサはさらに、
前記対象物への個々のボクセルからの距離に基づいて空間正則化パラメータを順応して選択することによって、前記正則化項を適用するように構成される、請求項8に記載のシステム。
【請求項14】
前記プロセッサはさらに、
前記対象物の実質的に内部のボクセルのためのより大きなパラメータを選択し、前記対象物の実質的に外部のボクセルのためのより小さなパラメータを選択するように構成される、請求項13に記載のシステム。
【請求項15】
心臓のスキャンデータを獲得し、
前記スキャンデータの現在の画像推定を順投影して、計算された投影データを生成し、
前記スキャンデータ及び前記計算された投影データに対してデータフィット項及び正則化項を適用し、
時空間情報に適合するように前記データフィット項及び前記正則化項を修正して、前記スキャンデータ及び前記計算された投影データから再構成された画像を形成するように構成されるプロセッサを有する、心臓の画像を再構成するためのシステム。
【請求項16】
式f^=argminfD(f)+T(f)+S(f)を前記スキャンデータに適用することであって、f=(f1,...,fi)は、再構成される画像フレームの数Lを表し、D(J)はデータフィット項、T(J)は時間正則化項、及びS(J)は空間正則化項であることをさらに有する、請求項15に記載のシステム。
【請求項17】
前記プロセッサはさらに、
式D(f)=Σm=1MΣI=1LwmId(ym,AmfI)を適用することによって、前記スキャンデータに前記データフィット項を適用するように構成され、mは測定された投影ビューy1からymの1つであり、wmIは時間データ重み付けファクタであり、及びd(ym,AmfI)は、ymとAmfIとの間の距離の大きさである、請求項15に記載のシステム。
【請求項18】
前記プロセッサはさらに、心臓の運動状態に基づいて動的にAmを調整するように構成される、請求項17に記載のシステム。
【請求項19】
前記プロセッサはさらに、
式T(f)=ΣI=2LΣj=1Jtljp(flj−fl-1,j)を適用することによって前記画像データに正則化項を適用するように構成され、jは各画像におけるボクセルの数であり、p(.)はポテンシャル関数、及びtljは空間正則化パラメータである、請求項15に記載のシステム。
【請求項20】
前記プロセッサはさらに、
式S(f)=Σj=1LΣk=1ksjkp(flj−fl,j-nk)を適用することによって前記正則化項を適用するように構成され、Kは各画像の空間に隣接する画像の数であり、nkはk番目に隣接する空間の相対指数であり、及びp(・)はポテンシャル関数である、請求項15に記載のシステム。
【請求項1】
画像再構成を用いて画像の解像度を上げる方法であって、
対象物のスキャンデータを獲得し、
前記スキャンデータの現在の画像推定を順投影して、計算された投影データを生成し、
前記スキャンデータ及び前記計算された投影データに対してデータフィット項及び正則化項を適用し、
時空間情報に適合するように前記データフィット項及び前記正則化項を修正して、前記スキャンデータ及び前記計算された投影データから再構成された画像を形成すること、を有する方法。
【請求項2】
式f^=argminfD(f)+T(f)+S(f)を前記スキャンデータに適用することをさらに有し、f=(f1,...,fL)であり、Lは再構成される画像フレームの数を表し、D(J)はデータフィット項、T(J)は時間正則化項、及びS(J)は空間正則化項である、請求項1に記載の方法。
【請求項3】
前記データフィット項を適用することは、
順投影作用素及び時間データ重み付けファクタを含むデータフィット項を適用し、
前記対象物の動きの状態に基づいて、前記順投影作用素を動的に調整し、且つ、
予想画像と投影画像のビューとの間の関係に基づいて時間データ重み付けファクタを順応して選択することをさらに有する、請求項1に記載の方法。
【請求項4】
前記正則化項を適用することは、前記画像データの個々のボクセル内の対象物の動きの量に基づいて時間正則化パラメータを順応して選択することをさらに有する請求項1に記載の方法。
【請求項5】
前記正則化項を修正することはさらに、実質的に動きの無いボクセルのためのより大きなパラメータを選択し、実質的な動きのあるボクセルのためのより小さなパラメータを選択することを有する、請求項4に記載の方法。
【請求項6】
前記正則化項を適用することはさらに、前記対象物への個々のボクセルからの距離に基づいて空間正則化パラメータを順応して選択することを有する、請求項1に記載の方法。
【請求項7】
前記正則化項を修正することはさらに、前記対象物の実質的に内部のボクセルのためのより大きなパラメータを選択し、前記対象物の実質的に外部のボクセルのためのより小さなパラメータを選択することをさらに有する、請求項6に記載の方法。
【請求項8】
対象物のスキャンデータを獲得し、
前記スキャンデータの現在の画像推定を順投影して、計算された投影データを生成し、
前記スキャンデータ及び前記計算された投影データに対してデータフィット項及び正則化項を適用し、
時空間情報に適合するように前記データフィット項及び前記正則化項を修正して、前記スキャンデータ及び前記計算された投影データから再構成された画像を形成するように構成されるプロセッサを有する、画像を再構成するためのシステム。
【請求項9】
式f^=argminfD(f)+T(f)+S(f)を前記スキャンデータに適用することであって、f=(f1,...,fi)は、再構成される画像フレームの数Lを表し、D(J)はデータフィット項、T(J)は時間正則化項、及びS(J)は空間正則化項であることをさらに有する、請求項8に記載のシステム。
【請求項10】
前記プロセッサはさらに、
順投影作用素及び時間データ重み付けファクタを含むデータフィット項を適用し、
対象物の動きの状態に基づいて、前記順投影作用素を動的に調整し、且つ、
予想される画像と投影される画像のビューとの間の関係に基づいて時間的なデータ重み付けファクタを順応して選択するように構成される、請求項8に記載のシステム。
【請求項11】
前記プロセッサはさらに、
前記画像データの個々のボクセル内の対象物の動きの量に基づいて時間正則化パラメータを順応して選択することによって、前記正則化項を適用するように構成される請求項8に記載のシステム。
【請求項12】
前記プロセッサはさらに、
実質的に動きの無いボクセルのためのより大きなパラメータを選択し、実質的な動きのあるボクセルのためのより小さなパラメータを選択することを有する、請求項11に記載のシステム。
【請求項13】
前記プロセッサはさらに、
前記対象物への個々のボクセルからの距離に基づいて空間正則化パラメータを順応して選択することによって、前記正則化項を適用するように構成される、請求項8に記載のシステム。
【請求項14】
前記プロセッサはさらに、
前記対象物の実質的に内部のボクセルのためのより大きなパラメータを選択し、前記対象物の実質的に外部のボクセルのためのより小さなパラメータを選択するように構成される、請求項13に記載のシステム。
【請求項15】
心臓のスキャンデータを獲得し、
前記スキャンデータの現在の画像推定を順投影して、計算された投影データを生成し、
前記スキャンデータ及び前記計算された投影データに対してデータフィット項及び正則化項を適用し、
時空間情報に適合するように前記データフィット項及び前記正則化項を修正して、前記スキャンデータ及び前記計算された投影データから再構成された画像を形成するように構成されるプロセッサを有する、心臓の画像を再構成するためのシステム。
【請求項16】
式f^=argminfD(f)+T(f)+S(f)を前記スキャンデータに適用することであって、f=(f1,...,fi)は、再構成される画像フレームの数Lを表し、D(J)はデータフィット項、T(J)は時間正則化項、及びS(J)は空間正則化項であることをさらに有する、請求項15に記載のシステム。
【請求項17】
前記プロセッサはさらに、
式D(f)=Σm=1MΣI=1LwmId(ym,AmfI)を適用することによって、前記スキャンデータに前記データフィット項を適用するように構成され、mは測定された投影ビューy1からymの1つであり、wmIは時間データ重み付けファクタであり、及びd(ym,AmfI)は、ymとAmfIとの間の距離の大きさである、請求項15に記載のシステム。
【請求項18】
前記プロセッサはさらに、心臓の運動状態に基づいて動的にAmを調整するように構成される、請求項17に記載のシステム。
【請求項19】
前記プロセッサはさらに、
式T(f)=ΣI=2LΣj=1Jtljp(flj−fl-1,j)を適用することによって前記画像データに正則化項を適用するように構成され、jは各画像におけるボクセルの数であり、p(.)はポテンシャル関数、及びtljは空間正則化パラメータである、請求項15に記載のシステム。
【請求項20】
前記プロセッサはさらに、
式S(f)=Σj=1LΣk=1ksjkp(flj−fl,j-nk)を適用することによって前記正則化項を適用するように構成され、Kは各画像の空間に隣接する画像の数であり、nkはk番目に隣接する空間の相対指数であり、及びp(・)はポテンシャル関数である、請求項15に記載のシステム。
【図1】

【図2】
【図3】
【図2】
【図3】
【公表番号】特表2010−528764(P2010−528764A)
【公表日】平成22年8月26日(2010.8.26)
【国際特許分類】
【出願番号】特願2010−511228(P2010−511228)
【出願日】平成20年4月15日(2008.4.15)
【国際出願番号】PCT/US2008/060360
【国際公開番号】WO2008/154070
【国際公開日】平成20年12月18日(2008.12.18)
【出願人】(509298458)パーデュー リサーチ ファウンデーション (2)
【出願人】(500047572)ザ、リージェンツ、オブ、ザ、ユニバーシティ、オブ、ミシガン (12)
【氏名又は名称原語表記】THE REGENTS OF THE UNIVERSITY OF MICHIGAN
【出願人】(509298469)ザ ユニバーシティ オブ ノートルダム デュ ラック (2)
【出願人】(506324677)ジェネラル エレクトリック カンパニー (4)
【Fターム(参考)】
【公表日】平成22年8月26日(2010.8.26)
【国際特許分類】
【出願日】平成20年4月15日(2008.4.15)
【国際出願番号】PCT/US2008/060360
【国際公開番号】WO2008/154070
【国際公開日】平成20年12月18日(2008.12.18)
【出願人】(509298458)パーデュー リサーチ ファウンデーション (2)
【出願人】(500047572)ザ、リージェンツ、オブ、ザ、ユニバーシティ、オブ、ミシガン (12)
【氏名又は名称原語表記】THE REGENTS OF THE UNIVERSITY OF MICHIGAN
【出願人】(509298469)ザ ユニバーシティ オブ ノートルダム デュ ラック (2)
【出願人】(506324677)ジェネラル エレクトリック カンパニー (4)
【Fターム(参考)】
[ Back to top ]