
移動局装置
【課題】
GPSアシストデータを取得する際に、冗長な測位サーバクセスを抑制する。
【解決手段】
GPS衛星からGPS信号を受信し、測位サーバからアシストデータを受信して、GPS信号とアシストデータを用いて自局の位置を測定する移動局装置において、移動局装置が第1の位置にいるときに、基地局からの受信レベルと送信電力値により第1の概略位置を算出するとともに、第1のアシストデータを取得して測位処理を行い、移動局装置が第2の位置に移動したときに、第2の概略位置を算出し、第1の概略位置と第2の概略位置の間の移動距離が閾値未満の場合は、第2のアシストデータの取得を行わず、第1のアシストデータを用いて測位処理を行い、移動距離が閾値以上の場合は、第2のアシストデータを取得して測位処理を行う。
GPSアシストデータを取得する際に、冗長な測位サーバクセスを抑制する。
【解決手段】
GPS衛星からGPS信号を受信し、測位サーバからアシストデータを受信して、GPS信号とアシストデータを用いて自局の位置を測定する移動局装置において、移動局装置が第1の位置にいるときに、基地局からの受信レベルと送信電力値により第1の概略位置を算出するとともに、第1のアシストデータを取得して測位処理を行い、移動局装置が第2の位置に移動したときに、第2の概略位置を算出し、第1の概略位置と第2の概略位置の間の移動距離が閾値未満の場合は、第2のアシストデータの取得を行わず、第1のアシストデータを用いて測位処理を行い、移動距離が閾値以上の場合は、第2のアシストデータを取得して測位処理を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置情報を取得して使用者等に通知する機能を有する移動局装置に関し、特に、GPS(Global Positioning System)測位のためのアシストデータを、測位サーバから取得して利用しGPS測位を行う移動局装置に関するものである。
【背景技術】
【0002】
GPSを利用した測位は様々な測位に適用されており、近年、携帯電話機等の無線システムにおける移動局装置の測位においても広く応用されている。GPS測位においては、距離を測るための時刻信号と、GPS衛星の位置を知るための衛星軌道情報(アルマナックやエフェメリス)を、GPS衛星から受信して用いる。衛星軌道情報は、GPS衛星から取得するのに分単位の時間を要する。このような移動局装置での測位演算を高速化するために、GPS衛星から提供される衛星軌道情報や該衛星軌道情報に対応するリファレンスポジション等を含むGPSアシストデータ(以下、アシストデータ)を、測位サーバから取得して利用する方法が用いられている。このアシストデータの一部であるリファレンスポジションは、GPS衛星から送信された衛星軌道情報を使用することのできる位置を示すもので、移動局装置が移動してリファレンスポジション内から外れると、移動先の位置における新たなリファレンスポジションに対応する衛星軌道情報を入手する必要がある。
【0003】
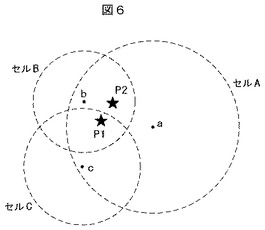
従来技術における移動局装置では、移動局装置が隣接セルに移動するたびに測位サーバにアクセスし、新しいリファレンスポジションを含むアシストデータを取得していた。この様子を、図6を用いてCDMA(Code Division Multiple Access)システムを例にして説明する。
図6に示すように、移動局装置がP1に位置しており、セルA、セルB、セルCと無線チャネルで接続されたダイバーシチハンドオーバー状態であるときを考える。a、b、cは、それぞれ、セルA、セルB、セルCの基地局の位置である。移動局装置が位置P1から位置P2へ移動すると、移動局装置はセルCの領域から外れることになり、ダイバーシチハンドオーバーのブランチ、つまり移動局装置と接続された無線チャネルからセルC成分を削除するように、移動局装置が動作する。すなわち、移動局装置は、移動局装置がセルCの領域からセルA、Bの領域に移動したと判断することができる。そこで従来の移動局装置は、セル領域の移動に伴い、測位サーバにアクセスし、アシストデータを再取得する。
【0004】
ここで、移動局装置が、位置P1から位置P2への移動時に、丁度、セルCの領域境界付近に留まってしまった場合を考える。この場合、移動局装置はセルC領域への進入と退出を繰り返し、セルC成分のダイバーシチハンドオーバーブランチの追加削除を繰り返す動作をする可能性がある。そのような状態において従来の移動局装置では、実質的な移動がほとんど無いにも関わらず、進入、退出の度にダイバーシチハンドオーバー状態が変化するので、測位サーバからアシストデータを取得更新することになる。このため、冗長なサーバクセスが発生してしまい、その結果として、ネットワークに対する負荷が増大したり、測位サーバへの負荷が増大するという問題があった。
【0005】
下記の特許文献1には、携帯端末が、初回の位置検出ではサーバとの通信を行い、サーバからGPSアシスト情報と基地局位置情報とを取得すると共に、取得したGPSアシスト情報を用いてGPS衛星から受信したGPS信号の受信結果をサーバに報告して、サーバで演算された携帯端末の位置情報を取得し、2回目以降の位置検出ではサーバとの通信およびGPS信号の受信を行わず、周辺基地局との電波伝搬時間の測定結果と、前回の携帯端末の位置情報と、基地局位置情報とを用いて、携帯端末自身で位置検出演算を行うことが記載されている。この特許文献1の技術によれば、GPSアシスト情報取得のための携帯端末からサーバへのアクセスを減じることはできるが、2回目以降の位置検出ではGPS信号の受信を行わないため、位置検出の精度が十分でない場合がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−339070号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、上述したような従来の課題を解決するために為されたもので、測位サーバからアシストデータを取得するためのネットワークへのアクセス頻度を削減しつつ、アシストデータとGPS衛星から受信したGPS信号(位置測定用データ)とに基づき、高精度な測位を行うことができる移動局装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本願発明においては、移動局装置の移動時においてアシストデータの再取得の必要性を判断し、必要時のみアシストデータの再取得を行うものである。
本願発明に係る移動局装置の代表的な構成は、次のとおりである。すなわち、
GPS衛星からGPS信号を受信し、無線ネットワークを介して複数の基地局装置と接続され、前記無線ネットワークを介して測位サーバから測位のためのアシストデータを受信して、前記GPS信号と前記アシストデータを用いて自局の位置を測定する移動局装置であって、
前記無線ネットワークから無線信号を受信し、前記無線ネットワークへ無線信号を送信する第1無線部と、
前記第1無線部で受信した前記基地局装置からの無線信号の受信レベルを測定する無線品質測定部と、
前記第1無線部で受信した前記基地局装置からの報知情報であって、該基地局装置の位置情報と送信電力値とを含む報知情報を取得する報知情報取得部と、
前記アシストデータを取得するためのメッセージを前記第1無線部を介して前記測位サーバへ送信し、前記第1無線部を介して前記測位サーバからのアシストデータを受信して取得するアシストデータ処理部と、
前記GPS衛星からの無線信号を受信する第2無線部と、
前記第2無線部で受信したGPS信号と前記アシストデータ処理部で取得したアシストデータとを用いて、前記移動局装置の位置情報を算出して取得する測位処理を行うGPS測位処理部と、
前記移動局装置の移動時における測位処理を制御するGPS測位制御部とを備え、
前記GPS測位制御部は、
前記報知情報取得部で取得した前記基地局装置の送信電力値と、前記無線品質測定部で測定した前記基地局装置からの無線信号の受信レベルとの差に基づいて、前記移動局装置と前記基地局装置の間の距離を算出する基地局距離算出処理を、前記移動局装置周辺の複数の基地局装置について行い、前記基地局距離算出処理で算出した複数の基地局装置と移動局装置の間の距離と、前記報知情報取得部で取得した前記基地局装置の位置情報とに基づいて前記移動局装置の概略位置を算出する概略位置算出処理機能を有し、
前記移動局装置が第1の位置にいるときに、前記概略位置算出処理により第1の概略位置を算出するとともに、前記アシストデータ処理部に第1のアシストデータを取得させて、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、その後、前記移動局装置が第2の位置に移動したときに、前記概略位置算出処理により第2の概略位置を算出し、前記第1の概略位置と前記第2の概略位置の間の移動距離が所定の閾値未満の場合は、前記アシストデータ処理部に第2のアシストデータの取得を行わせず、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、前記第1の概略位置と前記第2の概略位置の間の移動距離が前記所定の閾値以上の場合は、前記アシストデータ処理部に第2のアシストデータを取得させて、前記GPS測位処理部に前記第2のアシストデータを用いた前記測位処理を行わせるよう制御することを特徴とする移動局装置。
【発明の効果】
【0009】
測位サーバからアシストデータを取得するためのネットワークへのアクセス頻度を削減しつつ、高精度な測位を行うことができる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態に係る移動局装置の構成例を示す図である。
【図2】本発明の実施形態に係る移動局装置における概略位置検出の概念を示す図である。
【図3】本発明の実施形態に係るアシストデータ再取得の判断処理を説明する図(その1)である。
【図4】本発明の実施形態に係るアシストデータ再取得の判断処理を説明する図(その2)である。
【図5】本発明の実施形態に係るアシストデータ再取得の判断処理を説明する図(その3)である。
【図6】従来技術におけるアシストデータ再取得の状況を説明する図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態について図1〜図5を用いて説明する。
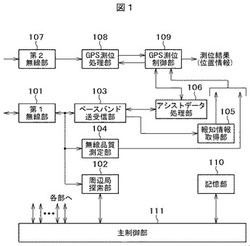
まず、移動局装置の構成について、図1を用いて説明する。図1は、本発明の実施形態に係る移動局装置の構成例を示す図である。
図1において、101は第1無線部で、第1のアンテナ(不図示)を介して、ネットワーク側、具体的には、移動局装置が属する無線通信システムの複数の基地局装置から無線周波数帯域の信号を受信し、該受信した無線周波数帯域の信号からベースバンド帯域の信号へと帯域変換する、または、ベースバンド信号から無線周波数帯域への信号へ帯域変換し、該帯域変換した無線周波数帯域の信号を、第1のアンテナ(不図示)を介して、複数の基地局装置へ送信するものである。
【0012】
102は周辺局探索部で、当該移動局装置が位置する地点から検出できる当該移動局装置周辺のセル、つまり基地局を探索するものである。
103はベースバンド送受信部で、第1無線部101でベースバンド帯域に変換された信号のベースバンド復調処理やデータ復号化処理、及び第1無線部101を経由し、ネットワークに対してデータを送信するためのデータ符号化処理やベースバンド変調処理を行うものである。
104は無線品質測定部で、当該移動局装置が位置する地点での在圏セルあるいはその周辺セルの受信レベル、つまり無線品質を測定するものである。無線品質とは、例えば、受信レベルを示すRSCP(希望波受信電力:Received Signal Code Power)や、通話に使っている希望波とその他の電波の受信電力との比であるEc/Noなどのことである。
【0013】
105は報知情報取得部で、ベースバンド送受信部103の受信機能で復調したデータから、基地局から送られてきた報知情報を取得し、後述する記憶部110へ記憶させるものである。この報知情報には、基地局の位置情報や基地局のパイロットチャネルの送信電力値などのセル情報が含まれる。
106はアシストデータ処理部で、後述する測位制御部109の指示により、アシストデータを取得するためのメッセージを作成し、ベースバンド送受信部103と第1無線部101を経て、無線ネットワークを経由して基地局を介し、測位サーバへ送信する。また、アシストデータ処理部106は、測位サーバから基地局を介し無線ネットワークを経由して送信されたアシストデータを受信して取得し、該取得したアシストデータと取得時の時刻情報とを対応させて、後述する記憶部110に記憶させるものである。
このアシストデータは、移動局装置の測位を補助するためのデータであって、GPS衛星の衛星軌道情報や該衛星軌道情報に対応するリファレンスポジション等を含む。
【0014】
107は第2無線部で、第2のアンテナ(不図示)を介して、GPS衛星から無線周波数帯域のGPS信号を受信し、ベースバンド帯域に変換するものである。このGPS信号は、位置測定用の時刻信号であり、アシストデータとして供給される衛星軌道情報(アルマナックやエフェメリス)は含まなくてもよい。
108はGPS測位処理部で、第2無線部107で受信したGPS信号とGPS測位制御部109から指定されるアシストデータとを用いて、移動局装置の位置情報を算出して取得するものである。
109はGPS測位制御部で、アシストデータの取得の必要性を判断し、必要時にアシストデータの取得をアシストデータ処理部106に指示するものである。また、GPS測位制御部109は、GPS測位処理部108に、測位処理に使用するアシストデータを指定するとともに、測位処理を指示し、測位結果である移動局装置の位置情報を、GPS測位処理部108から取得し、該取得した位置情報と取得時の時刻情報とを対応させて、後述する記憶部110に記憶させるものである。
【0015】
110は記憶部で、アシストデータ等の各種データを記憶する。図1では、記憶部110と主制御部との接続のみを図示しているが、記憶部110は、周辺局探索部102、無線品質測定部104、報知情報取得部105、アシストデータ処理部106、GPS測位制御部109とも接続されている。
111は主制御部で、101〜110の各部を統括制御しながら、移動局装置としての呼処理及び測位処理等を実行するものである。なお、主制御部111を、周辺局探索部102、無線品質測定部104、報知情報取得部105、アシストデータ処理部106、GPS測位処理部108、GPS測位制御部109と一体とした制御部として構成すること、あるいは、周辺局探索部102、無線品質測定部104、報知情報取得部105、アシストデータ処理部106、GPS測位処理部108、GPS測位制御部109の機能を適宜抽出した制御部として構成することも可能である。
【0016】
次に、本実施形態の移動局装置におけるGPS測位アシストデータ取得の動作について説明する。
まず説明の前提として、移動局装置のセル更新動作を説明する。
移動局装置は、在圏する無線システムにおいて位置登録を行った後、待受け状態に入る。待受け中に移動局装置からの通信開始要求が発生した場合、あるいは、ネットワーク側から移動局装置に対して通信開始要求が発生した場合に、当該移動局装置とネットワーク(具体的には基地局)との間で通信リンクを張り、通信を行う。また、移動局装置は、待受け中、あるいは通信中の移動に伴い、在圏セルを更新しつつ、最適なセルと接続するように動作する。また例えば、CDMAシステムの場合は、移動局装置が、在圏セルの移動の過程で、複数のセルと同時に接続するいわゆるダイバーシチハンドオーバー状態を経由しながら、移動することができる。当該移動局装置は、ダイバーシチハンドオーバー候補セルを検出するため、又は、より品質の良いセルに移行するために、在圏セルを含めて当該移動局装置の周辺セルを探索し、探索の結果、検出したセルについてその無線品質を測定しつつ、セル情報等を取得する。
【0017】
次に、本実施形態に係る移動局装置における周辺セルの検出動作と、セル情報の取得の動作について説明する。ここではCDMAシステムを例として説明するが、本発明はCDMA以外の無線システムにも適用可能である。
在圏する無線システムの基地局からの無線信号は、第1無線部101にて周波数変換及び直交検波が行われ、同相成分と直交成分信号に分離され、ディジタル信号に変換された後、周辺局探索部102、ベースバンド送受信部103、無線品質測定部104に出力される。
【0018】
第1無線部101からのディジタル変換されたベースバンド信号を用いて、周辺局探索部102で、移動局装置の周辺セルの探索を行う。周辺局探索部102は、周辺セルの探索の結果、当該移動局の現在位置にて検出できたセルを、記憶部110に記憶させるとともに、主制御部111に通知する。
主制御部111は、検出セルの品質情報及びセル情報を取得するために、ベースバンド送受信部103、無線品質測定部104、報知情報取得部105に、周辺局探索部102で検出されたセルのセルパラメータを設定する。セルパラメータとはセルを特定できるパラメータのことであり、CDMAシステムを例とすると、周波数、拡散コード番号、パスのタイミング等の情報である。
【0019】
主制御部111からの指示を受けて、ベースバンド送受信部103では、第1無線部101からのディジタル変換されたベースバンド信号を用いて、セルの報知情報が伝送されている報知チャネルの受信データに対し、逆拡散、同期検波、復号化などのベースバンド受信処理を行う。ベースバンド送受信部103でベースバンド受信処理された報知チャネルのデータは、報知情報取得部105に入力される。報知情報取得部105では、ベースバンド送受信部103からの報知チャネルデータから、セルの報知情報を取得し、報知情報内にあるセル情報(基地局の位置情報やパイロットチャネルの送信電力値等)を得て、記憶部110に記憶させる。
【0020】
無線品質測定部104では、同じく第1無線部101からのディジタル変換されたベースバンド信号を用いて、当該セルのパイロットチャネルの無線品質(受信レベル)の測定を行い、当該セルのセル品質を取得し、記憶部110に記憶させる。
以上の動作により、主制御部111から指定されたセルについてのセル情報、及びセル品質を取得することができる。移動局装置の現在地において、周辺局探索部102で複数のセルが検出できている場合は、本動作を検出したセルの数だけ、セル情報及びセル品質の取得動作を繰返し行う。
【0021】
次に、移動局装置における測位処理について説明する。
まず、測位処理に必要なアシストデータの取得処理について説明する。
例えば移動局装置の使用者からの測位指示を、移動局装置の操作部(不図示)が受け付けると、主制御部111は、測位処理を実行するようにGPS測位制御部109に指示を行う。GPS測位制御部109では、測位を実施するときに、アシストデータがまだ記憶部110に記憶されていない場合には、アシストデータの取得を行う必要があると判断する。その場合、GPS測位制御部109は、アシストデータ処理部106に対して、アシストデータを在圏セルのネットワーク側に要求すべく、アシストデータ要求メッセージをネットワーク側へ送信するように、つまり、基地局を介して測位サーバへ送信するように指示をする。
指示を受けたアシストデータ処理部106は、要求メッセージを示す送信データを作成し、ベースバンド送受信部103に出力する。ベースバンド送受信部103では、ネットワーク側に送信するために必要な符号化、変調、拡散などの送信処理を行い、第1無線部101に出力する。第1無線部101では、ベースバンド送信信号を無線周波数に変換して、第1のアンテナ(不図示)を介して無線信号として出力し、基地局を介して測位サーバへ送信する。
【0022】
ネットワーク側では、当該移動局装置からのアシストデータ要求を受けて、測位サーバが、アシストデータを基地局経由で移動局装置へ送信する。測位サーバは、常時、GPS衛星からのGPS時刻信号や衛星軌道情報を受信し、また、各移動局装置の概略位置を基地局を介して認識しており、各移動局装置の概略位置に対応する適切なアシストデータ、すなわち、衛星軌道情報や該衛星軌道情報に対応するリファレンスポジションを送信する。
アシストデータの送信方法としては、呼制御データの一部として制御チャネルを用いて送信する方法や、ユーザーデータの一部として通信チャネルを用いて送信する方法などがある。
【0023】
アシストデータを取得するために移動局装置では、在圏セルの制御チャネル、あるいは通信チャネルの受信処理を行う。そのため、主制御部111は、在圏セルの制御チャネル(通信チャネル)を特定して在圏セルの品質を測定するためのパイロットチャネルのチャネルパラメータを、ベースバンド送受信部103、無線品質測定部104に設定する。
【0024】
アシストデータが送信されている制御チャネル(又は通信チャネル)の信号は、第1無線部101にて周波数変換及び直交検波が行われ、同相成分と直交成分信号に分離され、ディジタル信号に変換された後、ベースバンド送受信部103に出力される。ベースバンド送受信部103では、設定されたチャネルパラメータに基づき、第1無線部101からのディジタル変換されたベースバンド信号を用いて制御チャネル(通信チャネル)の逆拡散、同期検波、復号化などのベースバンド受信処理を行う。
ベースバンド送受信部103でベースバンド受信処理された制御チャネル(又は通信チャネル)の受信データは、アシストデータ処理部106に入力される。アシストデータ処理部106では、ベースバンド送受信部103からの制御チャネル(又は通信チャネル)のデータから、アシストデータを取得し、GPS測位制御部109に出力する。また、アシストデータ処理部106では、取得したアシストデータと取得時の時刻情報とを対応させて、記憶部110に記憶させる。
【0025】
GPS測位制御部109は、アシストデータ処理部106で取得したアシストデータ、例えば衛星軌道情報や該衛星軌道情報に対応するリファレンスポジションと、GPS衛星から受信したGPS時刻信号とを用いて、当該移動局装置の位置を算出し、記憶部110に記憶させる。主制御部111は、算出した移動局装置の位置を、例えば当該移動局装置の表示部に地図等を用いて表示する。
【0026】
次に、本実施形態に係るアシストデータ取得における特徴について説明する。
GPS測位制御部109では、上述のように、アシストデータの取得に関する制御を行い、アシストデータが記憶部110に存在しない場合には、無条件でアシストデータを取得する。
一方、既にアシストデータが記憶部110に存在する場合には、GPS測位制御部109は、アシストデータの再取得の必要性を判断する。このために本実施形態にかかる移動局装置においては、GPS測位制御部109が、まず移動局装置の概略位置の推定を行い、前回アシストデータを取得した移動局装置の位置から所定の閾値以上、距離が離れている場合に、アシストデータの再取得を行うものである。
【0027】
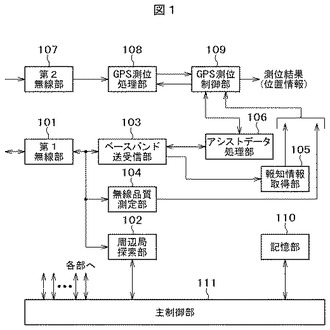
移動局装置の概略位置の推定方法を、図2を用いて説明する。図2は、本実施形態に係る移動局装置における概略位置検出の概念を示す図である。
図2において、a、b、cは、それぞれ各セルA、B、Cを構成する基地局装置の場所(セル位置)を示している。各セルにて基地局装置から報知されている報知情報には、例えば、それぞれ、各セルを特定する特定情報(ID情報)と、a、b、cのセル位置(例えば緯度経度)と、各セルにおけるパイロットチャネルの送信電力値が含まれている。
【0028】
(基地局距離算出処理)
まず、移動局装置と基地局の間の距離を算出する基地局距離算出処理について説明する。
今、移動局装置が位置Pにいて、そこからは、セルA、セルB、セルCが検出可能であったとする。移動局装置は上述したように、その周辺セルを検出し、検出したセルの無線品質を測定し、検出したセルの報知情報を基地局から受信している。すなわち、図2に示すような状況においては、無線品質測定部104によるセルA、B、Cのセル品質の測定がなされており、各セルのパイロットチャネルの受信電力が明らかになっている。また、報知情報取得部105によるセルA、B、Cの報知情報内のセル情報の取得がなされており、セル情報から、各セルのパイロットチャネルの送信電力とセル位置が明らかになっている。
そこで、本実施形態にかかる移動局装置では、GPS測位制御部109が、セル情報から得られたパイロットチャネルの送信電力値と、セル品質から得られたパイロットチャネル受信電力との差を計算し、各セルにおける伝搬損失を得る。すなわち、
伝搬損失=(パイロットチャネル送信電力)−(パイロットチャネル受信電力)…式(1)
【0029】
また、伝搬損失と距離の関係については、自由空間伝搬損失を当てはめると算出することが可能である。すなわち、
Lf=(4πd/λ)2…式(2)
d=(λ/4π)(Lf)1/2…式(3)
ここで、Lfは自由空間伝搬損失、λは波長、dは距離である。
【0030】
検出セルの周波数より求めた波長及び式(1)より求めた伝搬損失を、それぞれ、式(3)のλとLfに代入することにより、距離dを求めることができる。このような方法で、セルA(位置a)、セルB(位置b)、セルC(位置c)から移動局装置までの距離をそれぞれ求める。
なお、ここで説明した方法は、空間伝搬における伝送距離についての考え方のひとつであり、別の方法で伝送距離を求めても構わない。
【0031】
(概略位置算出処理)
次に、上記基地局距離算出処理で算出した複数の基地局装置と移動局装置の間の距離と、基地局装置の位置情報とに基づいて、移動局装置の概略位置を算出する概略位置算出処理について説明する。
位置a、b、cを中心に、各基地局装置と移動局装置の間の距離を半径とする円を考え、その交点付近が、現在移動局装置がいる概算の位置P(x,y)と考えることができる。x,yは、例えば緯度と経度である。
GPS測位制御部109は、上述したように周辺セルの検出動作をする毎に、複数検出されたセルのセル品質やセル情報を用いて概略位置を推定し、記憶部110に記憶させる。
【0032】
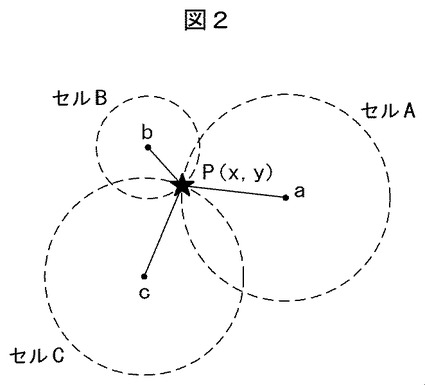
次に、上述の概略位置を利用したアシストデータ再取得の必要性の判断処理について、図3〜図5を用いて説明する。図3〜図5は、本実施形態に係るアシストデータ再取得の判断処理を説明する図である。このアシストデータ再取得の必要性の判断処理は、GPS測位制御部109により行われる。
図3において、位置P1(x1,y1)は、現在の移動局装置の位置、つまりカレントポイントを示している。a、b、cは、それぞれ、セルA、セルB、セルCの基地局の位置である。移動局装置は位置P1において、セルA、セルB、セルCを検出できており、かつダイバーシチハンドオーバー状態である。移動局装置は、位置P1で前述した概略位置の推定を行い、その位置を認識するとともに、アシストデータの取得処理を行う。すなわち、移動局装置にとって基準となる位置であるベースポイントがそれまで無い場合には、その時のカレントポイント(x1,y1)をベースポイントとし、該ベースポイントの位置データとアシストデータとを対応させて記憶部110に記憶する。
【0033】
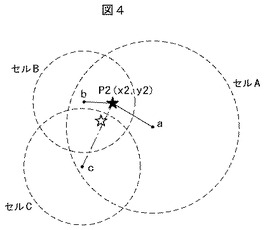
次に、移動局装置が、図3における位置P1から図4における位置P2に移動したとする。すなわち、図4中の☆印から★印まで移動したとする。位置P2においては、セルA、B、Cを検出できるものの、セルCの品質が下がってきており、移動局装置はセルCの領域から外れることになり、ダイバーシチハンドオーバーのブランチからセルC成分を削除する条件が整っている状態である。すなわち、移動局装置では、セルCの領域からセルA、セルBの領域に移動したと判断することができる。
【0034】
従来技術においては、このダイバーシチハンドオーバーの状態の変化により、アシストデータの再取得を行っていた。しかしながら本実施形態においては、移動局装置は、位置P2においてそのカレントポイント(x2,y2)を求める。次に、ベースポイントP1(x1,y1)からカレントポイントP2(x2,y2)までの移動距離を求める。移動局装置は、この移動距離を所定の閾値と比較し、本例では移動距離が閾値未満なので、ベースポイントの更新や、アシストデータの再取得は行わない。
【0035】
このように、移動局装置は、移動局装置の移動距離を所定の閾値と比較し、移動距離が閾値未満の場合には、ベースポイントの更新や、アシストデータの再取得は行わない。また、次に述べるように、移動距離が閾値以上の場合には、ベースポイントを更新し、アシストデータの再取得を行う。なお、上述の閾値は、移動局装置の操作部を介して、外部より設定可能となっている。
【0036】
さらに移動局装置が移動して、図5における位置P3に移動したとする。すなわち図5中の☆印から★印まで移動したとする。ここでは既にセルCの検出ができない状態になっており、その代わりにセルDが検出可能となっている。つまりセルDの領域に入ってきたことになり、今度はダイバーシチハンドオーバーブランチとしてセルD成分を追加するように動作するが、移動局装置は、セルB、C、Dのセル品質測定結果と取得したセル情報を用いて、位置P3のカレントポイント(x3,y3)を求める。そして、前述と同様に、ベースポイントP1(x1,y1)からカレントポイントP3(x3,y3)までの移動距離を求め、所定の閾値と比較する。本例では移動距離が閾値以上であるので、カレントポイントP3を新しいベースポイントとして、記憶部110に記憶し更新するとともに、アシストデータを再取得するための処理を実行する。
【0037】
さらに上述の実施形態において、移動局装置は、上述のカレントポイントの位置情報とともに該カレントポイントを求めた時刻であるカレントポイント推定時刻を、記憶部110に記憶しておく。また、ベースポイントの位置情報とともに該ベースポイントを求めた時刻であるベースポイント推定時刻を、記憶部110に記憶しておく。そして、移動局装置は、移動距離が閾値以上である場合において、例えばP1からP2へ移動する際の経過時間を、ベースポイント推定時刻とカレントポイント推定時刻から算出し、該経過時間を所定の閾値と比較し、経過時間が閾値以上となった場合に、カレントポイントを新しいベースポイントとして更新し記憶部110に記憶するとともに、アシストデータを再取得するための処理を実行するように動作し、あるいは、移動距離が閾値以上であって経過時間が閾値未満である場合に、カレントポイントを更新せず、アシストデータを再取得するための処理を実行しないように動作するよう構成することも可能である。
【0038】
以上説明したように、移動局装置で測位を行う場合、移動局装置の位置と、該位置で測位サーバから取得したアシストデータとを関連付けて記憶保持し、移動局装置が移動した場合であっても、移動距離が所定の閾値未満であれば、前回のアシストデータをそのまま再利用することが可能である。これにより、移動局装置が測位時に通信する測位サーバとのアクセス頻度を少なくすることができる。
なお、一般的には、アシストデータであるリファレンスポジションの要求精度は、無線システムのセル半径と比較して十分に大きいと考えられる。そのため、隣接セルへ移動した場合でも、そのまま同じリファレンスポジションをアシストデータとして使用することが可能である。
【0039】
本実施形態によれば、少なくとも次の(1)〜(4)の効果を得ることができる。
(1)移動局装置の移動時においてアシストデータの再取得の必要性を判断し、必要時のみアシストデータの再取得を行うようにしたので、測位サーバからアシストデータを取得するためのネットワークへのアクセス頻度を削減することができる。
(2)移動局装置が第1の位置において第1の概略位置を算出し、第1の位置から第2の位置に移動したときに第2の概略位置を算出し、第1の概略位置と第2の概略位置の間の移動距離が所定の閾値未満の場合は、アシストデータの取得を行わずに前回取得のアシストデータを用いた測位処理を行い、上記移動距離が所定の閾値以上の場合は、新たにアシストデータを取得して測位処理を行うようにしたので、アシストデータを取得するためのアクセス頻度を削減することができることができる。
(3)基地局装置の送信電力値と基地局装置からの無線信号の受信レベルとの差から、移動局装置と複数の基地局装置の間の距離を算出し、該移動局装置と複数の基地局装置の間の距離と基地局装置の位置情報とに基づき、移動局装置の第1の概略位置や第2の概略位置を算出するので、第1の概略位置や第2の概略位置を容易に求めることができる。
(4)第1の概略位置と第2の概略位置の間の移動距離が所定の閾値未満の場合は、アシストデータの取得を行わずに前回取得のアシストデータを用いた測位処理を行い、上記移動距離が所定の閾値以上の場合であって、かつ第1の概略位置と第2の概略位置の間の移動時間が所定の閾値以上の場合は、新たにアシストデータを取得して測位処理を行うようにしたので、さらに、アシストデータを取得するためのアクセス頻度を削減することができることができる。
【0040】
なお、本発明は、前記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々に変更が可能であることはいうまでもない。
例えば、上述した実施形態では、測位サーバは基地局に接続され、移動局装置は、基地局を介して測位サーバにアクセスしたが、移動局装置が基地局を介さずに無線により測位サーバにアクセスする構成とすることも可能である。また、測位サーバを基地局と一体的に構成することも可能である。
また、本発明は、本発明に係る処理を実行する装置としてだけでなく、システム、方法として、或いは、このような方法やシステムを実現するためのプログラムや当該プログラムを記録する記録媒体などとして把握することができる。
また、本発明は、CPUがメモリに格納された制御プログラムを実行することにより制御する構成としてもよく、また、ハードウエア回路として構成してもよい。
【0041】
本明細書には、少なくとも次の発明が含まれる。
第1の発明は、
GPS衛星からGPS信号を受信し、無線ネットワークを介して複数の基地局装置と接続され、前記無線ネットワークを介して測位サーバから測位のためのアシストデータを受信して、前記GPS信号と前記アシストデータを用いて自局の位置を測定する移動局装置であって、
前記無線ネットワークから無線信号を受信し、前記無線ネットワークへ無線信号を送信する第1無線部と、
前記第1無線部で受信した前記基地局装置からの無線信号の受信レベルを測定する無線品質測定部と、
前記第1無線部で受信した前記基地局装置からの報知情報であって、該基地局装置の位置情報と送信電力値とを含む報知情報を取得する報知情報取得部と、
前記アシストデータを取得するためのメッセージを前記第1無線部を介して前記測位サーバへ送信し、前記第1無線部を介して前記測位サーバからのアシストデータを受信して取得するアシストデータ処理部と、
前記GPS衛星からの無線信号を受信する第2無線部と、
前記第2無線部で受信したGPS信号と前記アシストデータ処理部で取得したアシストデータとを用いて、前記移動局装置の位置情報を算出して取得する測位処理を行うGPS測位処理部と、
前記移動局装置の移動時における測位処理を制御するGPS測位制御部とを備え、
前記GPS測位制御部は、
前記報知情報取得部で取得した前記基地局装置の送信電力値と、前記無線品質測定部で測定した前記基地局装置からの無線信号の受信レベルとの差に基づいて、前記移動局装置と前記基地局装置の間の距離を算出する基地局距離算出処理を、前記移動局装置周辺の複数の基地局装置について行い、前記基地局距離算出処理で算出した複数の基地局装置と移動局装置の間の距離と、前記報知情報取得部で取得した前記基地局装置の位置情報とに基づいて前記移動局装置の概略位置を算出する概略位置算出処理機能を有し、
前記移動局装置が第1の位置にいるときに、前記概略位置算出処理により第1の概略位置を算出するとともに、前記アシストデータ処理部に第1のアシストデータを取得させて、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、その後、前記移動局装置が第2の位置に移動したときに、前記概略位置算出処理により第2の概略位置を算出し、前記第1の概略位置と前記第2の概略位置の間の移動距離が所定の閾値未満の場合は、前記アシストデータ処理部に第2のアシストデータの取得を行わせず、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、前記第1の概略位置と前記第2の概略位置の間の移動距離が前記所定の閾値以上の場合は、前記アシストデータ処理部に第2のアシストデータを取得させて、前記GPS測位処理部に前記第2のアシストデータを用いた前記測位処理を行わせるよう制御することを特徴とする移動局装置。
【0042】
第2の発明は、第1の発明の移動局装置であって、
前記GPS測位制御部は、
前記移動局装置が第1の位置にいるときに、前記概略位置算出処理により第1の概略位置を算出するとともに、前記アシストデータ処理部に第1のアシストデータを取得させて、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、その後、前記移動局装置が第2の位置に移動したときに、前記概略位置算出処理により第2の概略位置を算出し、前記第1の概略位置と前記第2の概略位置の間の移動距離が所定の閾値未満の場合は、前記アシストデータ処理部に第2のアシストデータの取得を行わせず、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、前記第1の概略位置と前記第2の概略位置の間の移動距離が前記所定の閾値以上であって、かつ前記第1の概略位置と前記第2の概略位置の間の移動時間が所定の閾値以上の場合は、前記アシストデータ処理部に第2のアシストデータを取得させて、前記GPS測位処理部に前記第2のアシストデータを用いた前記測位処理を行わせるよう制御することを特徴とする移動局装置。
【0043】
第3の発明は、
GPS衛星からGPS信号を受信し、無線ネットワークを介して複数の基地局装置と接続され、前記無線ネットワークを介して測位サーバから測位のためのアシストデータを受信して、前記GPS信号と前記アシストデータを用いて自局の位置を測定する移動局装置、又は移動局装置の位置測定方法であって、
前記基地局装置からの無線信号の受信レベルを測定する受信レベル測定ステップと、
前記基地局装置からの報知情報であって、該基地局装置の位置情報と送信電力値とを含む報知情報を取得する報知情報取得ステップと、
前記報知情報取得ステップで取得した前記基地局装置の送信電力値と、前記受信レベル測定ステップで測定した前記基地局装置からの無線信号の受信レベルとの差から、前記移動局装置と前記基地局装置の間の距離を算出する基地局距離算出処理ステップと、
前記基地局距離算出処理ステップを前記移動局装置周辺の複数の基地局装置について行い、前記基地局距離算出処理ステップで算出した複数の基地局装置と移動局装置の間の距離と、前記報知情報取得ステップで取得した前記基地局装置の位置情報とに基づいて前記移動局装置の概略位置を算出する概略位置算出処理ステップと、
前記移動局装置が第1の位置にいるときに、前記概略位置算出処理ステップにより第1の概略位置を算出するとともに、前記測位サーバからの第1のアシストデータを受信して取得し、前記第1のアシストデータと前記GPS衛星から受信したGPS信号とを用いて前記移動局装置の位置情報を算出する測位処理を行う、第1の測位処理ステップと、
前記移動局装置が前記第1の位置から第2の位置に移動したときに、前記概略位置算出処理ステップにより第2の概略位置を算出し、前記第1の概略位置と前記第2の概略位置の間の移動距離が所定の閾値未満の場合は、第2のアシストデータの取得を行わず、前記第1のアシストデータと前記GPS衛星から受信したGPS信号とを用いて前記移動局装置の位置情報を算出する測位処理を行い、前記第1の概略位置と前記第2の概略位置の間の移動距離が前記所定の閾値以上の場合は、前記測位サーバからの第2のアシストデータを受信して取得し、前記第2のアシストデータと前記GPS衛星から受信したGPS信号とを用いて前記移動局装置の位置情報を算出する測位処理を行う、第2の測位処理ステップを備えることを特徴とする移動局装置、又は移動局装置の位置測定方法。
【符号の説明】
【0044】
101…第1無線部、102…周辺局探索部、103…ベースバンド送受信部、104…無線品質測定部、105…報知情報取得部、106…アシストデータ処理部、107…第2無線部、108…GPS測位処理部、109…GPS測位制御部、110…記憶部、111…主制御部。
【技術分野】
【0001】
本発明は、位置情報を取得して使用者等に通知する機能を有する移動局装置に関し、特に、GPS(Global Positioning System)測位のためのアシストデータを、測位サーバから取得して利用しGPS測位を行う移動局装置に関するものである。
【背景技術】
【0002】
GPSを利用した測位は様々な測位に適用されており、近年、携帯電話機等の無線システムにおける移動局装置の測位においても広く応用されている。GPS測位においては、距離を測るための時刻信号と、GPS衛星の位置を知るための衛星軌道情報(アルマナックやエフェメリス)を、GPS衛星から受信して用いる。衛星軌道情報は、GPS衛星から取得するのに分単位の時間を要する。このような移動局装置での測位演算を高速化するために、GPS衛星から提供される衛星軌道情報や該衛星軌道情報に対応するリファレンスポジション等を含むGPSアシストデータ(以下、アシストデータ)を、測位サーバから取得して利用する方法が用いられている。このアシストデータの一部であるリファレンスポジションは、GPS衛星から送信された衛星軌道情報を使用することのできる位置を示すもので、移動局装置が移動してリファレンスポジション内から外れると、移動先の位置における新たなリファレンスポジションに対応する衛星軌道情報を入手する必要がある。
【0003】
従来技術における移動局装置では、移動局装置が隣接セルに移動するたびに測位サーバにアクセスし、新しいリファレンスポジションを含むアシストデータを取得していた。この様子を、図6を用いてCDMA(Code Division Multiple Access)システムを例にして説明する。
図6に示すように、移動局装置がP1に位置しており、セルA、セルB、セルCと無線チャネルで接続されたダイバーシチハンドオーバー状態であるときを考える。a、b、cは、それぞれ、セルA、セルB、セルCの基地局の位置である。移動局装置が位置P1から位置P2へ移動すると、移動局装置はセルCの領域から外れることになり、ダイバーシチハンドオーバーのブランチ、つまり移動局装置と接続された無線チャネルからセルC成分を削除するように、移動局装置が動作する。すなわち、移動局装置は、移動局装置がセルCの領域からセルA、Bの領域に移動したと判断することができる。そこで従来の移動局装置は、セル領域の移動に伴い、測位サーバにアクセスし、アシストデータを再取得する。
【0004】
ここで、移動局装置が、位置P1から位置P2への移動時に、丁度、セルCの領域境界付近に留まってしまった場合を考える。この場合、移動局装置はセルC領域への進入と退出を繰り返し、セルC成分のダイバーシチハンドオーバーブランチの追加削除を繰り返す動作をする可能性がある。そのような状態において従来の移動局装置では、実質的な移動がほとんど無いにも関わらず、進入、退出の度にダイバーシチハンドオーバー状態が変化するので、測位サーバからアシストデータを取得更新することになる。このため、冗長なサーバクセスが発生してしまい、その結果として、ネットワークに対する負荷が増大したり、測位サーバへの負荷が増大するという問題があった。
【0005】
下記の特許文献1には、携帯端末が、初回の位置検出ではサーバとの通信を行い、サーバからGPSアシスト情報と基地局位置情報とを取得すると共に、取得したGPSアシスト情報を用いてGPS衛星から受信したGPS信号の受信結果をサーバに報告して、サーバで演算された携帯端末の位置情報を取得し、2回目以降の位置検出ではサーバとの通信およびGPS信号の受信を行わず、周辺基地局との電波伝搬時間の測定結果と、前回の携帯端末の位置情報と、基地局位置情報とを用いて、携帯端末自身で位置検出演算を行うことが記載されている。この特許文献1の技術によれば、GPSアシスト情報取得のための携帯端末からサーバへのアクセスを減じることはできるが、2回目以降の位置検出ではGPS信号の受信を行わないため、位置検出の精度が十分でない場合がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−339070号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、上述したような従来の課題を解決するために為されたもので、測位サーバからアシストデータを取得するためのネットワークへのアクセス頻度を削減しつつ、アシストデータとGPS衛星から受信したGPS信号(位置測定用データ)とに基づき、高精度な測位を行うことができる移動局装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本願発明においては、移動局装置の移動時においてアシストデータの再取得の必要性を判断し、必要時のみアシストデータの再取得を行うものである。
本願発明に係る移動局装置の代表的な構成は、次のとおりである。すなわち、
GPS衛星からGPS信号を受信し、無線ネットワークを介して複数の基地局装置と接続され、前記無線ネットワークを介して測位サーバから測位のためのアシストデータを受信して、前記GPS信号と前記アシストデータを用いて自局の位置を測定する移動局装置であって、
前記無線ネットワークから無線信号を受信し、前記無線ネットワークへ無線信号を送信する第1無線部と、
前記第1無線部で受信した前記基地局装置からの無線信号の受信レベルを測定する無線品質測定部と、
前記第1無線部で受信した前記基地局装置からの報知情報であって、該基地局装置の位置情報と送信電力値とを含む報知情報を取得する報知情報取得部と、
前記アシストデータを取得するためのメッセージを前記第1無線部を介して前記測位サーバへ送信し、前記第1無線部を介して前記測位サーバからのアシストデータを受信して取得するアシストデータ処理部と、
前記GPS衛星からの無線信号を受信する第2無線部と、
前記第2無線部で受信したGPS信号と前記アシストデータ処理部で取得したアシストデータとを用いて、前記移動局装置の位置情報を算出して取得する測位処理を行うGPS測位処理部と、
前記移動局装置の移動時における測位処理を制御するGPS測位制御部とを備え、
前記GPS測位制御部は、
前記報知情報取得部で取得した前記基地局装置の送信電力値と、前記無線品質測定部で測定した前記基地局装置からの無線信号の受信レベルとの差に基づいて、前記移動局装置と前記基地局装置の間の距離を算出する基地局距離算出処理を、前記移動局装置周辺の複数の基地局装置について行い、前記基地局距離算出処理で算出した複数の基地局装置と移動局装置の間の距離と、前記報知情報取得部で取得した前記基地局装置の位置情報とに基づいて前記移動局装置の概略位置を算出する概略位置算出処理機能を有し、
前記移動局装置が第1の位置にいるときに、前記概略位置算出処理により第1の概略位置を算出するとともに、前記アシストデータ処理部に第1のアシストデータを取得させて、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、その後、前記移動局装置が第2の位置に移動したときに、前記概略位置算出処理により第2の概略位置を算出し、前記第1の概略位置と前記第2の概略位置の間の移動距離が所定の閾値未満の場合は、前記アシストデータ処理部に第2のアシストデータの取得を行わせず、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、前記第1の概略位置と前記第2の概略位置の間の移動距離が前記所定の閾値以上の場合は、前記アシストデータ処理部に第2のアシストデータを取得させて、前記GPS測位処理部に前記第2のアシストデータを用いた前記測位処理を行わせるよう制御することを特徴とする移動局装置。
【発明の効果】
【0009】
測位サーバからアシストデータを取得するためのネットワークへのアクセス頻度を削減しつつ、高精度な測位を行うことができる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態に係る移動局装置の構成例を示す図である。
【図2】本発明の実施形態に係る移動局装置における概略位置検出の概念を示す図である。
【図3】本発明の実施形態に係るアシストデータ再取得の判断処理を説明する図(その1)である。
【図4】本発明の実施形態に係るアシストデータ再取得の判断処理を説明する図(その2)である。
【図5】本発明の実施形態に係るアシストデータ再取得の判断処理を説明する図(その3)である。
【図6】従来技術におけるアシストデータ再取得の状況を説明する図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態について図1〜図5を用いて説明する。
まず、移動局装置の構成について、図1を用いて説明する。図1は、本発明の実施形態に係る移動局装置の構成例を示す図である。
図1において、101は第1無線部で、第1のアンテナ(不図示)を介して、ネットワーク側、具体的には、移動局装置が属する無線通信システムの複数の基地局装置から無線周波数帯域の信号を受信し、該受信した無線周波数帯域の信号からベースバンド帯域の信号へと帯域変換する、または、ベースバンド信号から無線周波数帯域への信号へ帯域変換し、該帯域変換した無線周波数帯域の信号を、第1のアンテナ(不図示)を介して、複数の基地局装置へ送信するものである。
【0012】
102は周辺局探索部で、当該移動局装置が位置する地点から検出できる当該移動局装置周辺のセル、つまり基地局を探索するものである。
103はベースバンド送受信部で、第1無線部101でベースバンド帯域に変換された信号のベースバンド復調処理やデータ復号化処理、及び第1無線部101を経由し、ネットワークに対してデータを送信するためのデータ符号化処理やベースバンド変調処理を行うものである。
104は無線品質測定部で、当該移動局装置が位置する地点での在圏セルあるいはその周辺セルの受信レベル、つまり無線品質を測定するものである。無線品質とは、例えば、受信レベルを示すRSCP(希望波受信電力:Received Signal Code Power)や、通話に使っている希望波とその他の電波の受信電力との比であるEc/Noなどのことである。
【0013】
105は報知情報取得部で、ベースバンド送受信部103の受信機能で復調したデータから、基地局から送られてきた報知情報を取得し、後述する記憶部110へ記憶させるものである。この報知情報には、基地局の位置情報や基地局のパイロットチャネルの送信電力値などのセル情報が含まれる。
106はアシストデータ処理部で、後述する測位制御部109の指示により、アシストデータを取得するためのメッセージを作成し、ベースバンド送受信部103と第1無線部101を経て、無線ネットワークを経由して基地局を介し、測位サーバへ送信する。また、アシストデータ処理部106は、測位サーバから基地局を介し無線ネットワークを経由して送信されたアシストデータを受信して取得し、該取得したアシストデータと取得時の時刻情報とを対応させて、後述する記憶部110に記憶させるものである。
このアシストデータは、移動局装置の測位を補助するためのデータであって、GPS衛星の衛星軌道情報や該衛星軌道情報に対応するリファレンスポジション等を含む。
【0014】
107は第2無線部で、第2のアンテナ(不図示)を介して、GPS衛星から無線周波数帯域のGPS信号を受信し、ベースバンド帯域に変換するものである。このGPS信号は、位置測定用の時刻信号であり、アシストデータとして供給される衛星軌道情報(アルマナックやエフェメリス)は含まなくてもよい。
108はGPS測位処理部で、第2無線部107で受信したGPS信号とGPS測位制御部109から指定されるアシストデータとを用いて、移動局装置の位置情報を算出して取得するものである。
109はGPS測位制御部で、アシストデータの取得の必要性を判断し、必要時にアシストデータの取得をアシストデータ処理部106に指示するものである。また、GPS測位制御部109は、GPS測位処理部108に、測位処理に使用するアシストデータを指定するとともに、測位処理を指示し、測位結果である移動局装置の位置情報を、GPS測位処理部108から取得し、該取得した位置情報と取得時の時刻情報とを対応させて、後述する記憶部110に記憶させるものである。
【0015】
110は記憶部で、アシストデータ等の各種データを記憶する。図1では、記憶部110と主制御部との接続のみを図示しているが、記憶部110は、周辺局探索部102、無線品質測定部104、報知情報取得部105、アシストデータ処理部106、GPS測位制御部109とも接続されている。
111は主制御部で、101〜110の各部を統括制御しながら、移動局装置としての呼処理及び測位処理等を実行するものである。なお、主制御部111を、周辺局探索部102、無線品質測定部104、報知情報取得部105、アシストデータ処理部106、GPS測位処理部108、GPS測位制御部109と一体とした制御部として構成すること、あるいは、周辺局探索部102、無線品質測定部104、報知情報取得部105、アシストデータ処理部106、GPS測位処理部108、GPS測位制御部109の機能を適宜抽出した制御部として構成することも可能である。
【0016】
次に、本実施形態の移動局装置におけるGPS測位アシストデータ取得の動作について説明する。
まず説明の前提として、移動局装置のセル更新動作を説明する。
移動局装置は、在圏する無線システムにおいて位置登録を行った後、待受け状態に入る。待受け中に移動局装置からの通信開始要求が発生した場合、あるいは、ネットワーク側から移動局装置に対して通信開始要求が発生した場合に、当該移動局装置とネットワーク(具体的には基地局)との間で通信リンクを張り、通信を行う。また、移動局装置は、待受け中、あるいは通信中の移動に伴い、在圏セルを更新しつつ、最適なセルと接続するように動作する。また例えば、CDMAシステムの場合は、移動局装置が、在圏セルの移動の過程で、複数のセルと同時に接続するいわゆるダイバーシチハンドオーバー状態を経由しながら、移動することができる。当該移動局装置は、ダイバーシチハンドオーバー候補セルを検出するため、又は、より品質の良いセルに移行するために、在圏セルを含めて当該移動局装置の周辺セルを探索し、探索の結果、検出したセルについてその無線品質を測定しつつ、セル情報等を取得する。
【0017】
次に、本実施形態に係る移動局装置における周辺セルの検出動作と、セル情報の取得の動作について説明する。ここではCDMAシステムを例として説明するが、本発明はCDMA以外の無線システムにも適用可能である。
在圏する無線システムの基地局からの無線信号は、第1無線部101にて周波数変換及び直交検波が行われ、同相成分と直交成分信号に分離され、ディジタル信号に変換された後、周辺局探索部102、ベースバンド送受信部103、無線品質測定部104に出力される。
【0018】
第1無線部101からのディジタル変換されたベースバンド信号を用いて、周辺局探索部102で、移動局装置の周辺セルの探索を行う。周辺局探索部102は、周辺セルの探索の結果、当該移動局の現在位置にて検出できたセルを、記憶部110に記憶させるとともに、主制御部111に通知する。
主制御部111は、検出セルの品質情報及びセル情報を取得するために、ベースバンド送受信部103、無線品質測定部104、報知情報取得部105に、周辺局探索部102で検出されたセルのセルパラメータを設定する。セルパラメータとはセルを特定できるパラメータのことであり、CDMAシステムを例とすると、周波数、拡散コード番号、パスのタイミング等の情報である。
【0019】
主制御部111からの指示を受けて、ベースバンド送受信部103では、第1無線部101からのディジタル変換されたベースバンド信号を用いて、セルの報知情報が伝送されている報知チャネルの受信データに対し、逆拡散、同期検波、復号化などのベースバンド受信処理を行う。ベースバンド送受信部103でベースバンド受信処理された報知チャネルのデータは、報知情報取得部105に入力される。報知情報取得部105では、ベースバンド送受信部103からの報知チャネルデータから、セルの報知情報を取得し、報知情報内にあるセル情報(基地局の位置情報やパイロットチャネルの送信電力値等)を得て、記憶部110に記憶させる。
【0020】
無線品質測定部104では、同じく第1無線部101からのディジタル変換されたベースバンド信号を用いて、当該セルのパイロットチャネルの無線品質(受信レベル)の測定を行い、当該セルのセル品質を取得し、記憶部110に記憶させる。
以上の動作により、主制御部111から指定されたセルについてのセル情報、及びセル品質を取得することができる。移動局装置の現在地において、周辺局探索部102で複数のセルが検出できている場合は、本動作を検出したセルの数だけ、セル情報及びセル品質の取得動作を繰返し行う。
【0021】
次に、移動局装置における測位処理について説明する。
まず、測位処理に必要なアシストデータの取得処理について説明する。
例えば移動局装置の使用者からの測位指示を、移動局装置の操作部(不図示)が受け付けると、主制御部111は、測位処理を実行するようにGPS測位制御部109に指示を行う。GPS測位制御部109では、測位を実施するときに、アシストデータがまだ記憶部110に記憶されていない場合には、アシストデータの取得を行う必要があると判断する。その場合、GPS測位制御部109は、アシストデータ処理部106に対して、アシストデータを在圏セルのネットワーク側に要求すべく、アシストデータ要求メッセージをネットワーク側へ送信するように、つまり、基地局を介して測位サーバへ送信するように指示をする。
指示を受けたアシストデータ処理部106は、要求メッセージを示す送信データを作成し、ベースバンド送受信部103に出力する。ベースバンド送受信部103では、ネットワーク側に送信するために必要な符号化、変調、拡散などの送信処理を行い、第1無線部101に出力する。第1無線部101では、ベースバンド送信信号を無線周波数に変換して、第1のアンテナ(不図示)を介して無線信号として出力し、基地局を介して測位サーバへ送信する。
【0022】
ネットワーク側では、当該移動局装置からのアシストデータ要求を受けて、測位サーバが、アシストデータを基地局経由で移動局装置へ送信する。測位サーバは、常時、GPS衛星からのGPS時刻信号や衛星軌道情報を受信し、また、各移動局装置の概略位置を基地局を介して認識しており、各移動局装置の概略位置に対応する適切なアシストデータ、すなわち、衛星軌道情報や該衛星軌道情報に対応するリファレンスポジションを送信する。
アシストデータの送信方法としては、呼制御データの一部として制御チャネルを用いて送信する方法や、ユーザーデータの一部として通信チャネルを用いて送信する方法などがある。
【0023】
アシストデータを取得するために移動局装置では、在圏セルの制御チャネル、あるいは通信チャネルの受信処理を行う。そのため、主制御部111は、在圏セルの制御チャネル(通信チャネル)を特定して在圏セルの品質を測定するためのパイロットチャネルのチャネルパラメータを、ベースバンド送受信部103、無線品質測定部104に設定する。
【0024】
アシストデータが送信されている制御チャネル(又は通信チャネル)の信号は、第1無線部101にて周波数変換及び直交検波が行われ、同相成分と直交成分信号に分離され、ディジタル信号に変換された後、ベースバンド送受信部103に出力される。ベースバンド送受信部103では、設定されたチャネルパラメータに基づき、第1無線部101からのディジタル変換されたベースバンド信号を用いて制御チャネル(通信チャネル)の逆拡散、同期検波、復号化などのベースバンド受信処理を行う。
ベースバンド送受信部103でベースバンド受信処理された制御チャネル(又は通信チャネル)の受信データは、アシストデータ処理部106に入力される。アシストデータ処理部106では、ベースバンド送受信部103からの制御チャネル(又は通信チャネル)のデータから、アシストデータを取得し、GPS測位制御部109に出力する。また、アシストデータ処理部106では、取得したアシストデータと取得時の時刻情報とを対応させて、記憶部110に記憶させる。
【0025】
GPS測位制御部109は、アシストデータ処理部106で取得したアシストデータ、例えば衛星軌道情報や該衛星軌道情報に対応するリファレンスポジションと、GPS衛星から受信したGPS時刻信号とを用いて、当該移動局装置の位置を算出し、記憶部110に記憶させる。主制御部111は、算出した移動局装置の位置を、例えば当該移動局装置の表示部に地図等を用いて表示する。
【0026】
次に、本実施形態に係るアシストデータ取得における特徴について説明する。
GPS測位制御部109では、上述のように、アシストデータの取得に関する制御を行い、アシストデータが記憶部110に存在しない場合には、無条件でアシストデータを取得する。
一方、既にアシストデータが記憶部110に存在する場合には、GPS測位制御部109は、アシストデータの再取得の必要性を判断する。このために本実施形態にかかる移動局装置においては、GPS測位制御部109が、まず移動局装置の概略位置の推定を行い、前回アシストデータを取得した移動局装置の位置から所定の閾値以上、距離が離れている場合に、アシストデータの再取得を行うものである。
【0027】
移動局装置の概略位置の推定方法を、図2を用いて説明する。図2は、本実施形態に係る移動局装置における概略位置検出の概念を示す図である。
図2において、a、b、cは、それぞれ各セルA、B、Cを構成する基地局装置の場所(セル位置)を示している。各セルにて基地局装置から報知されている報知情報には、例えば、それぞれ、各セルを特定する特定情報(ID情報)と、a、b、cのセル位置(例えば緯度経度)と、各セルにおけるパイロットチャネルの送信電力値が含まれている。
【0028】
(基地局距離算出処理)
まず、移動局装置と基地局の間の距離を算出する基地局距離算出処理について説明する。
今、移動局装置が位置Pにいて、そこからは、セルA、セルB、セルCが検出可能であったとする。移動局装置は上述したように、その周辺セルを検出し、検出したセルの無線品質を測定し、検出したセルの報知情報を基地局から受信している。すなわち、図2に示すような状況においては、無線品質測定部104によるセルA、B、Cのセル品質の測定がなされており、各セルのパイロットチャネルの受信電力が明らかになっている。また、報知情報取得部105によるセルA、B、Cの報知情報内のセル情報の取得がなされており、セル情報から、各セルのパイロットチャネルの送信電力とセル位置が明らかになっている。
そこで、本実施形態にかかる移動局装置では、GPS測位制御部109が、セル情報から得られたパイロットチャネルの送信電力値と、セル品質から得られたパイロットチャネル受信電力との差を計算し、各セルにおける伝搬損失を得る。すなわち、
伝搬損失=(パイロットチャネル送信電力)−(パイロットチャネル受信電力)…式(1)
【0029】
また、伝搬損失と距離の関係については、自由空間伝搬損失を当てはめると算出することが可能である。すなわち、
Lf=(4πd/λ)2…式(2)
d=(λ/4π)(Lf)1/2…式(3)
ここで、Lfは自由空間伝搬損失、λは波長、dは距離である。
【0030】
検出セルの周波数より求めた波長及び式(1)より求めた伝搬損失を、それぞれ、式(3)のλとLfに代入することにより、距離dを求めることができる。このような方法で、セルA(位置a)、セルB(位置b)、セルC(位置c)から移動局装置までの距離をそれぞれ求める。
なお、ここで説明した方法は、空間伝搬における伝送距離についての考え方のひとつであり、別の方法で伝送距離を求めても構わない。
【0031】
(概略位置算出処理)
次に、上記基地局距離算出処理で算出した複数の基地局装置と移動局装置の間の距離と、基地局装置の位置情報とに基づいて、移動局装置の概略位置を算出する概略位置算出処理について説明する。
位置a、b、cを中心に、各基地局装置と移動局装置の間の距離を半径とする円を考え、その交点付近が、現在移動局装置がいる概算の位置P(x,y)と考えることができる。x,yは、例えば緯度と経度である。
GPS測位制御部109は、上述したように周辺セルの検出動作をする毎に、複数検出されたセルのセル品質やセル情報を用いて概略位置を推定し、記憶部110に記憶させる。
【0032】
次に、上述の概略位置を利用したアシストデータ再取得の必要性の判断処理について、図3〜図5を用いて説明する。図3〜図5は、本実施形態に係るアシストデータ再取得の判断処理を説明する図である。このアシストデータ再取得の必要性の判断処理は、GPS測位制御部109により行われる。
図3において、位置P1(x1,y1)は、現在の移動局装置の位置、つまりカレントポイントを示している。a、b、cは、それぞれ、セルA、セルB、セルCの基地局の位置である。移動局装置は位置P1において、セルA、セルB、セルCを検出できており、かつダイバーシチハンドオーバー状態である。移動局装置は、位置P1で前述した概略位置の推定を行い、その位置を認識するとともに、アシストデータの取得処理を行う。すなわち、移動局装置にとって基準となる位置であるベースポイントがそれまで無い場合には、その時のカレントポイント(x1,y1)をベースポイントとし、該ベースポイントの位置データとアシストデータとを対応させて記憶部110に記憶する。
【0033】
次に、移動局装置が、図3における位置P1から図4における位置P2に移動したとする。すなわち、図4中の☆印から★印まで移動したとする。位置P2においては、セルA、B、Cを検出できるものの、セルCの品質が下がってきており、移動局装置はセルCの領域から外れることになり、ダイバーシチハンドオーバーのブランチからセルC成分を削除する条件が整っている状態である。すなわち、移動局装置では、セルCの領域からセルA、セルBの領域に移動したと判断することができる。
【0034】
従来技術においては、このダイバーシチハンドオーバーの状態の変化により、アシストデータの再取得を行っていた。しかしながら本実施形態においては、移動局装置は、位置P2においてそのカレントポイント(x2,y2)を求める。次に、ベースポイントP1(x1,y1)からカレントポイントP2(x2,y2)までの移動距離を求める。移動局装置は、この移動距離を所定の閾値と比較し、本例では移動距離が閾値未満なので、ベースポイントの更新や、アシストデータの再取得は行わない。
【0035】
このように、移動局装置は、移動局装置の移動距離を所定の閾値と比較し、移動距離が閾値未満の場合には、ベースポイントの更新や、アシストデータの再取得は行わない。また、次に述べるように、移動距離が閾値以上の場合には、ベースポイントを更新し、アシストデータの再取得を行う。なお、上述の閾値は、移動局装置の操作部を介して、外部より設定可能となっている。
【0036】
さらに移動局装置が移動して、図5における位置P3に移動したとする。すなわち図5中の☆印から★印まで移動したとする。ここでは既にセルCの検出ができない状態になっており、その代わりにセルDが検出可能となっている。つまりセルDの領域に入ってきたことになり、今度はダイバーシチハンドオーバーブランチとしてセルD成分を追加するように動作するが、移動局装置は、セルB、C、Dのセル品質測定結果と取得したセル情報を用いて、位置P3のカレントポイント(x3,y3)を求める。そして、前述と同様に、ベースポイントP1(x1,y1)からカレントポイントP3(x3,y3)までの移動距離を求め、所定の閾値と比較する。本例では移動距離が閾値以上であるので、カレントポイントP3を新しいベースポイントとして、記憶部110に記憶し更新するとともに、アシストデータを再取得するための処理を実行する。
【0037】
さらに上述の実施形態において、移動局装置は、上述のカレントポイントの位置情報とともに該カレントポイントを求めた時刻であるカレントポイント推定時刻を、記憶部110に記憶しておく。また、ベースポイントの位置情報とともに該ベースポイントを求めた時刻であるベースポイント推定時刻を、記憶部110に記憶しておく。そして、移動局装置は、移動距離が閾値以上である場合において、例えばP1からP2へ移動する際の経過時間を、ベースポイント推定時刻とカレントポイント推定時刻から算出し、該経過時間を所定の閾値と比較し、経過時間が閾値以上となった場合に、カレントポイントを新しいベースポイントとして更新し記憶部110に記憶するとともに、アシストデータを再取得するための処理を実行するように動作し、あるいは、移動距離が閾値以上であって経過時間が閾値未満である場合に、カレントポイントを更新せず、アシストデータを再取得するための処理を実行しないように動作するよう構成することも可能である。
【0038】
以上説明したように、移動局装置で測位を行う場合、移動局装置の位置と、該位置で測位サーバから取得したアシストデータとを関連付けて記憶保持し、移動局装置が移動した場合であっても、移動距離が所定の閾値未満であれば、前回のアシストデータをそのまま再利用することが可能である。これにより、移動局装置が測位時に通信する測位サーバとのアクセス頻度を少なくすることができる。
なお、一般的には、アシストデータであるリファレンスポジションの要求精度は、無線システムのセル半径と比較して十分に大きいと考えられる。そのため、隣接セルへ移動した場合でも、そのまま同じリファレンスポジションをアシストデータとして使用することが可能である。
【0039】
本実施形態によれば、少なくとも次の(1)〜(4)の効果を得ることができる。
(1)移動局装置の移動時においてアシストデータの再取得の必要性を判断し、必要時のみアシストデータの再取得を行うようにしたので、測位サーバからアシストデータを取得するためのネットワークへのアクセス頻度を削減することができる。
(2)移動局装置が第1の位置において第1の概略位置を算出し、第1の位置から第2の位置に移動したときに第2の概略位置を算出し、第1の概略位置と第2の概略位置の間の移動距離が所定の閾値未満の場合は、アシストデータの取得を行わずに前回取得のアシストデータを用いた測位処理を行い、上記移動距離が所定の閾値以上の場合は、新たにアシストデータを取得して測位処理を行うようにしたので、アシストデータを取得するためのアクセス頻度を削減することができることができる。
(3)基地局装置の送信電力値と基地局装置からの無線信号の受信レベルとの差から、移動局装置と複数の基地局装置の間の距離を算出し、該移動局装置と複数の基地局装置の間の距離と基地局装置の位置情報とに基づき、移動局装置の第1の概略位置や第2の概略位置を算出するので、第1の概略位置や第2の概略位置を容易に求めることができる。
(4)第1の概略位置と第2の概略位置の間の移動距離が所定の閾値未満の場合は、アシストデータの取得を行わずに前回取得のアシストデータを用いた測位処理を行い、上記移動距離が所定の閾値以上の場合であって、かつ第1の概略位置と第2の概略位置の間の移動時間が所定の閾値以上の場合は、新たにアシストデータを取得して測位処理を行うようにしたので、さらに、アシストデータを取得するためのアクセス頻度を削減することができることができる。
【0040】
なお、本発明は、前記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々に変更が可能であることはいうまでもない。
例えば、上述した実施形態では、測位サーバは基地局に接続され、移動局装置は、基地局を介して測位サーバにアクセスしたが、移動局装置が基地局を介さずに無線により測位サーバにアクセスする構成とすることも可能である。また、測位サーバを基地局と一体的に構成することも可能である。
また、本発明は、本発明に係る処理を実行する装置としてだけでなく、システム、方法として、或いは、このような方法やシステムを実現するためのプログラムや当該プログラムを記録する記録媒体などとして把握することができる。
また、本発明は、CPUがメモリに格納された制御プログラムを実行することにより制御する構成としてもよく、また、ハードウエア回路として構成してもよい。
【0041】
本明細書には、少なくとも次の発明が含まれる。
第1の発明は、
GPS衛星からGPS信号を受信し、無線ネットワークを介して複数の基地局装置と接続され、前記無線ネットワークを介して測位サーバから測位のためのアシストデータを受信して、前記GPS信号と前記アシストデータを用いて自局の位置を測定する移動局装置であって、
前記無線ネットワークから無線信号を受信し、前記無線ネットワークへ無線信号を送信する第1無線部と、
前記第1無線部で受信した前記基地局装置からの無線信号の受信レベルを測定する無線品質測定部と、
前記第1無線部で受信した前記基地局装置からの報知情報であって、該基地局装置の位置情報と送信電力値とを含む報知情報を取得する報知情報取得部と、
前記アシストデータを取得するためのメッセージを前記第1無線部を介して前記測位サーバへ送信し、前記第1無線部を介して前記測位サーバからのアシストデータを受信して取得するアシストデータ処理部と、
前記GPS衛星からの無線信号を受信する第2無線部と、
前記第2無線部で受信したGPS信号と前記アシストデータ処理部で取得したアシストデータとを用いて、前記移動局装置の位置情報を算出して取得する測位処理を行うGPS測位処理部と、
前記移動局装置の移動時における測位処理を制御するGPS測位制御部とを備え、
前記GPS測位制御部は、
前記報知情報取得部で取得した前記基地局装置の送信電力値と、前記無線品質測定部で測定した前記基地局装置からの無線信号の受信レベルとの差に基づいて、前記移動局装置と前記基地局装置の間の距離を算出する基地局距離算出処理を、前記移動局装置周辺の複数の基地局装置について行い、前記基地局距離算出処理で算出した複数の基地局装置と移動局装置の間の距離と、前記報知情報取得部で取得した前記基地局装置の位置情報とに基づいて前記移動局装置の概略位置を算出する概略位置算出処理機能を有し、
前記移動局装置が第1の位置にいるときに、前記概略位置算出処理により第1の概略位置を算出するとともに、前記アシストデータ処理部に第1のアシストデータを取得させて、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、その後、前記移動局装置が第2の位置に移動したときに、前記概略位置算出処理により第2の概略位置を算出し、前記第1の概略位置と前記第2の概略位置の間の移動距離が所定の閾値未満の場合は、前記アシストデータ処理部に第2のアシストデータの取得を行わせず、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、前記第1の概略位置と前記第2の概略位置の間の移動距離が前記所定の閾値以上の場合は、前記アシストデータ処理部に第2のアシストデータを取得させて、前記GPS測位処理部に前記第2のアシストデータを用いた前記測位処理を行わせるよう制御することを特徴とする移動局装置。
【0042】
第2の発明は、第1の発明の移動局装置であって、
前記GPS測位制御部は、
前記移動局装置が第1の位置にいるときに、前記概略位置算出処理により第1の概略位置を算出するとともに、前記アシストデータ処理部に第1のアシストデータを取得させて、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、その後、前記移動局装置が第2の位置に移動したときに、前記概略位置算出処理により第2の概略位置を算出し、前記第1の概略位置と前記第2の概略位置の間の移動距離が所定の閾値未満の場合は、前記アシストデータ処理部に第2のアシストデータの取得を行わせず、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、前記第1の概略位置と前記第2の概略位置の間の移動距離が前記所定の閾値以上であって、かつ前記第1の概略位置と前記第2の概略位置の間の移動時間が所定の閾値以上の場合は、前記アシストデータ処理部に第2のアシストデータを取得させて、前記GPS測位処理部に前記第2のアシストデータを用いた前記測位処理を行わせるよう制御することを特徴とする移動局装置。
【0043】
第3の発明は、
GPS衛星からGPS信号を受信し、無線ネットワークを介して複数の基地局装置と接続され、前記無線ネットワークを介して測位サーバから測位のためのアシストデータを受信して、前記GPS信号と前記アシストデータを用いて自局の位置を測定する移動局装置、又は移動局装置の位置測定方法であって、
前記基地局装置からの無線信号の受信レベルを測定する受信レベル測定ステップと、
前記基地局装置からの報知情報であって、該基地局装置の位置情報と送信電力値とを含む報知情報を取得する報知情報取得ステップと、
前記報知情報取得ステップで取得した前記基地局装置の送信電力値と、前記受信レベル測定ステップで測定した前記基地局装置からの無線信号の受信レベルとの差から、前記移動局装置と前記基地局装置の間の距離を算出する基地局距離算出処理ステップと、
前記基地局距離算出処理ステップを前記移動局装置周辺の複数の基地局装置について行い、前記基地局距離算出処理ステップで算出した複数の基地局装置と移動局装置の間の距離と、前記報知情報取得ステップで取得した前記基地局装置の位置情報とに基づいて前記移動局装置の概略位置を算出する概略位置算出処理ステップと、
前記移動局装置が第1の位置にいるときに、前記概略位置算出処理ステップにより第1の概略位置を算出するとともに、前記測位サーバからの第1のアシストデータを受信して取得し、前記第1のアシストデータと前記GPS衛星から受信したGPS信号とを用いて前記移動局装置の位置情報を算出する測位処理を行う、第1の測位処理ステップと、
前記移動局装置が前記第1の位置から第2の位置に移動したときに、前記概略位置算出処理ステップにより第2の概略位置を算出し、前記第1の概略位置と前記第2の概略位置の間の移動距離が所定の閾値未満の場合は、第2のアシストデータの取得を行わず、前記第1のアシストデータと前記GPS衛星から受信したGPS信号とを用いて前記移動局装置の位置情報を算出する測位処理を行い、前記第1の概略位置と前記第2の概略位置の間の移動距離が前記所定の閾値以上の場合は、前記測位サーバからの第2のアシストデータを受信して取得し、前記第2のアシストデータと前記GPS衛星から受信したGPS信号とを用いて前記移動局装置の位置情報を算出する測位処理を行う、第2の測位処理ステップを備えることを特徴とする移動局装置、又は移動局装置の位置測定方法。
【符号の説明】
【0044】
101…第1無線部、102…周辺局探索部、103…ベースバンド送受信部、104…無線品質測定部、105…報知情報取得部、106…アシストデータ処理部、107…第2無線部、108…GPS測位処理部、109…GPS測位制御部、110…記憶部、111…主制御部。
【特許請求の範囲】
【請求項1】
GPS衛星からGPS信号を受信し、無線ネットワークを介して複数の基地局装置と接続され、前記無線ネットワークを介して測位サーバから測位のためのアシストデータを受信して、前記GPS信号と前記アシストデータを用いて自局の位置を測定する移動局装置であって、
前記無線ネットワークから無線信号を受信し、前記無線ネットワークへ無線信号を送信する第1無線部と、
前記第1無線部で受信した前記基地局装置からの無線信号の受信レベルを測定する無線品質測定部と、
前記第1無線部で受信した前記基地局装置からの報知情報であって、該基地局装置の位置情報と送信電力値とを含む報知情報を取得する報知情報取得部と、
前記アシストデータを取得するためのメッセージを前記第1無線部を介して前記測位サーバへ送信し、前記第1無線部を介して前記測位サーバからのアシストデータを受信して取得するアシストデータ処理部と、
前記GPS衛星からの無線信号を受信する第2無線部と、
前記第2無線部で受信したGPS信号と前記アシストデータ処理部で取得したアシストデータとを用いて、前記移動局装置の位置情報を算出して取得する測位処理を行うGPS測位処理部と、
前記移動局装置の移動時における測位処理を制御するGPS測位制御部とを備え、
前記GPS測位制御部は、
前記報知情報取得部で取得した前記基地局装置の送信電力値と、前記無線品質測定部で測定した前記基地局装置からの無線信号の受信レベルとの差に基づいて、前記移動局装置と前記基地局装置の間の距離を算出する基地局距離算出処理を、前記移動局装置周辺の複数の基地局装置について行い、前記基地局距離算出処理で算出した複数の基地局装置と移動局装置の間の距離と、前記報知情報取得部で取得した前記基地局装置の位置情報とに基づいて前記移動局装置の概略位置を算出する概略位置算出処理機能を有し、
前記移動局装置が第1の位置にいるときに、前記概略位置算出処理により第1の概略位置を算出するとともに、前記アシストデータ処理部に第1のアシストデータを取得させて、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、その後、前記移動局装置が第2の位置に移動したときに、前記概略位置算出処理により第2の概略位置を算出し、前記第1の概略位置と前記第2の概略位置の間の移動距離が所定の閾値未満の場合は、前記アシストデータ処理部に第2のアシストデータの取得を行わせず、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、前記第1の概略位置と前記第2の概略位置の間の移動距離が前記所定の閾値以上の場合は、前記アシストデータ処理部に第2のアシストデータを取得させて、前記GPS測位処理部に前記第2のアシストデータを用いた前記測位処理を行わせるよう制御することを特徴とする移動局装置。
【請求項1】
GPS衛星からGPS信号を受信し、無線ネットワークを介して複数の基地局装置と接続され、前記無線ネットワークを介して測位サーバから測位のためのアシストデータを受信して、前記GPS信号と前記アシストデータを用いて自局の位置を測定する移動局装置であって、
前記無線ネットワークから無線信号を受信し、前記無線ネットワークへ無線信号を送信する第1無線部と、
前記第1無線部で受信した前記基地局装置からの無線信号の受信レベルを測定する無線品質測定部と、
前記第1無線部で受信した前記基地局装置からの報知情報であって、該基地局装置の位置情報と送信電力値とを含む報知情報を取得する報知情報取得部と、
前記アシストデータを取得するためのメッセージを前記第1無線部を介して前記測位サーバへ送信し、前記第1無線部を介して前記測位サーバからのアシストデータを受信して取得するアシストデータ処理部と、
前記GPS衛星からの無線信号を受信する第2無線部と、
前記第2無線部で受信したGPS信号と前記アシストデータ処理部で取得したアシストデータとを用いて、前記移動局装置の位置情報を算出して取得する測位処理を行うGPS測位処理部と、
前記移動局装置の移動時における測位処理を制御するGPS測位制御部とを備え、
前記GPS測位制御部は、
前記報知情報取得部で取得した前記基地局装置の送信電力値と、前記無線品質測定部で測定した前記基地局装置からの無線信号の受信レベルとの差に基づいて、前記移動局装置と前記基地局装置の間の距離を算出する基地局距離算出処理を、前記移動局装置周辺の複数の基地局装置について行い、前記基地局距離算出処理で算出した複数の基地局装置と移動局装置の間の距離と、前記報知情報取得部で取得した前記基地局装置の位置情報とに基づいて前記移動局装置の概略位置を算出する概略位置算出処理機能を有し、
前記移動局装置が第1の位置にいるときに、前記概略位置算出処理により第1の概略位置を算出するとともに、前記アシストデータ処理部に第1のアシストデータを取得させて、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、その後、前記移動局装置が第2の位置に移動したときに、前記概略位置算出処理により第2の概略位置を算出し、前記第1の概略位置と前記第2の概略位置の間の移動距離が所定の閾値未満の場合は、前記アシストデータ処理部に第2のアシストデータの取得を行わせず、前記GPS測位処理部に前記第1のアシストデータを用いた前記測位処理を行わせ、前記第1の概略位置と前記第2の概略位置の間の移動距離が前記所定の閾値以上の場合は、前記アシストデータ処理部に第2のアシストデータを取得させて、前記GPS測位処理部に前記第2のアシストデータを用いた前記測位処理を行わせるよう制御することを特徴とする移動局装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−101085(P2013−101085A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−246016(P2011−246016)
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000001122)株式会社日立国際電気 (5,007)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000001122)株式会社日立国際電気 (5,007)
【Fターム(参考)】
[ Back to top ]