
移動情報判定装置、受信機、及びそれについての方法
【課題】移動情報を判定するための移動情報判定装置、及び方法を提供する。
【解決手段】移動情報判定装置は、地球中心補助物(ECA)情報獲得モジュールと、高度情報及び位置情報保存モジュールと、移動情報計算モジュールとを備える。高度情報及び位置情報保存モジュールは、移動情報判定装置の初期位置情報及び移動情報判定装置の高度情報を提供する。ECA獲得モジュールは、移動情報判定装置の現在位置における地球の半径を獲得する。移動情報計算モジュールは、地球の半径及び複数の衛星が提供する複数の信号に基づいて、移動情報判定装置の現在位置及び/または速度を計算する。
【解決手段】移動情報判定装置は、地球中心補助物(ECA)情報獲得モジュールと、高度情報及び位置情報保存モジュールと、移動情報計算モジュールとを備える。高度情報及び位置情報保存モジュールは、移動情報判定装置の初期位置情報及び移動情報判定装置の高度情報を提供する。ECA獲得モジュールは、移動情報判定装置の現在位置における地球の半径を獲得する。移動情報計算モジュールは、地球の半径及び複数の衛星が提供する複数の信号に基づいて、移動情報判定装置の現在位置及び/または速度を計算する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動情報を判定するための移動情報判定装置、及び方法に関係する。
【背景技術】
【0002】
この出願は、参照することにより本書に含まれる、中華人民共和国の知識産権局(State Intellectual Property Office:SIPO)に2011年9月30日に出願された特許出願番号第201110306929.3号に対して優先権を主張する。
【発明の概要】
【発明が解決しようとする課題】
【0003】
全地球測位システム(GPS)のような従来の測位システム(positioning system)は、GPS受信機の位置を計算するために、少なくとも4つの衛星からの伝送距離を知ることを必要とし、そして最小二乗平均(Least Mean Squares:LMS)アルゴリズムを使用することによって、計算が行われる。しかしながら、もし伝送距離を測定することに利用可能な衛星の数が十分ではないならば、受信機の位置情報を獲得するために、従来のGPS測位方法(positioning method)を使用することは不可能である。更に、GPS信号に対する干渉(interference:妨害)(例えば、多重反射)、または不十分な衛星の幾何分布は、従来のGPS測位方法によって獲得された測位結果の正確度を大幅に減少し得る。例えば利用可能な衛星の数が4個未満であり、3個の衛星からのわずか3つの伝送距離が利用可能である場合の状況において、慣例上、一定の高度値が外部情報源から入力され、そして測位結果は二次元空間に関して計算される。しかしながら、高度値が適時に更新できないので、測位結果は、比較的大きな誤差を有する。
【課題を解決するための手段】
【0004】
本発明は、移動情報判定装置を開示する。前記移動情報判定装置は、地球中心補助物(Earth Center Assistant:ECA)情報獲得モジュールと、高度情報及び位置情報保存モジュールと、移動情報計算モジュールとを備える。前記ECA獲得モジュールは、前記移動情報判定装置の現在位置における地球の半径を獲得する。前記高度情報及び位置情報保存モジュールは、前記移動情報判定装置の位置情報(例えば初期位置情報)及び高度情報を提供するように構成される。前記移動情報計算モジュールは、前記地球の前記半径及び複数の衛星が提供する複数の信号に基づいて、前記移動情報判定装置の前記現在位置及び/または速度を計算する。
【0005】
別の実施例において、本発明は、全地球測位システムにおけるGPS受信機を開示する。前記GPS受信機は、移動情報判定装置と、ベースバンド信号処理ユニットとを備える。前記移動情報判定装置は、更に、前記移動情報判定装置の現在位置における地球の半径を獲得するための地球中心補助物(ECA)獲得モジュールと、前記移動情報判定装置の位置情報及び前記移動情報判定装置の高度情報を提供する高度情報及び位置情報保存モジュールと、前記地球の前記半径及び複数の衛星が提供する複数の信号に基づいて、前記移動情報判定装置の前記現在位置及び/または速度を計算する移動情報計算モジュールとを備える。前記ベースバンド信号処理ユニットは、前記移動情報判定装置に前記衛星からの信号を提供する。
【0006】
更にもう一つの実施例において、本発明は、GPS受信機を備えた対象物の移動情報を判定するための方法を開示する。前記方法は、高度情報及び位置情報保存モジュールにおいて、前記GPS受信機の初期位置情報及び高度情報を獲得するステップと、地球中心補助物(ECA)情報獲得モジュールにおいて、前記GPS受信機の前記初期位置情報及び前記高度情報に基づいて、前記GPS受信機の現在位置における地球の半径を獲得するステップと、移動情報計算モジュールにおいて、前記地球の前記半径及び複数の衛星が提供する複数の信号に基づいて、前記移動情報を計算するステップとを含み、前記移動情報は、前記受信機の前記現在位置及び速度の内の少なくとも1つを含む。
【0007】
本発明は、同じ参照符号が同等の要素を表す下記の図面が添付されることによって、下記の説明を考慮して、容易に理解されることになる。
【図面の簡単な説明】
【0008】
【図1A】本開示の一実施例による、移動情報判定装置の例を例証する構成図である。
【図1B】図1Aにおける移動情報判定装置の詳細な構成図を示す。
【図2】本開示の一実施例による、初期位置確定及び管理モジュールによって初期位置を確定する方法を例証するフローチャートである。
【図3A】従来のGPSシステムの実例である。
【図3B】本開示の一実施例による、移動情報判定装置から衛星までの観測ベクトルの例である。
【図3C】本開示の一実施例による、本発明によって提供される地球中心補助物(ECA)測位戦略(Earth center assistant (ECA) positioning strategy)を利用する形態(topology)の例である。
【図4】本開示の一実施例による、移動情報判定装置に統合されたGPS受信機の構成図である。
【図5】本開示の一実施例による、測位方法を例証するフローチャートである。
【図6】精度低下率(DOP)値が比較的大きい場合の、本発明に開示されたGPS受信機及び従来の受信機から獲得された測位誤差及び精度低下率(DOP)値を例証する4枚のグラフである。
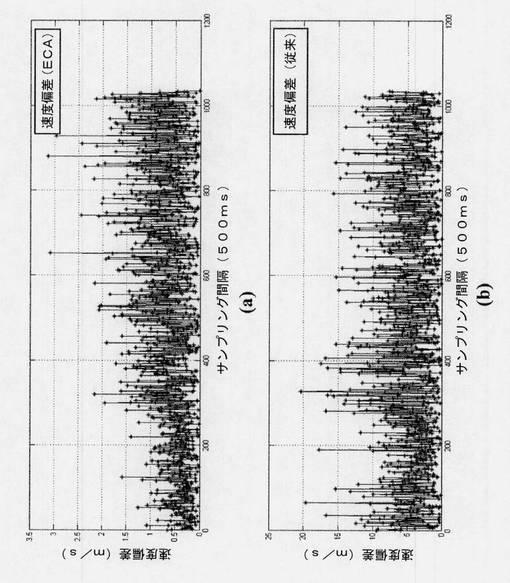
【図7】精度低下率(DOP)値が比較的大きい場合の、本発明に開示されたGPS受信機及び従来の受信機から獲得された速度偏差値を例証する2枚のグラフである。
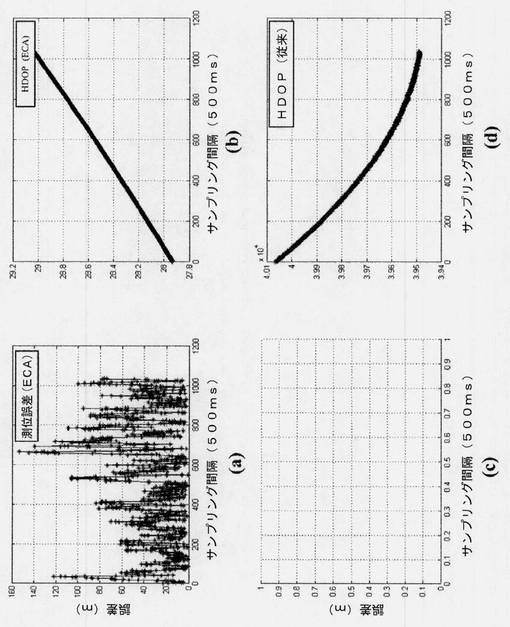
【図8】精度低下率(DOP)値が非常に大きい場合の、本発明に開示されたGPS受信機及び従来の受信機から獲得された測位誤差及び精度低下率(DOP)値を例証する4枚のグラフである。
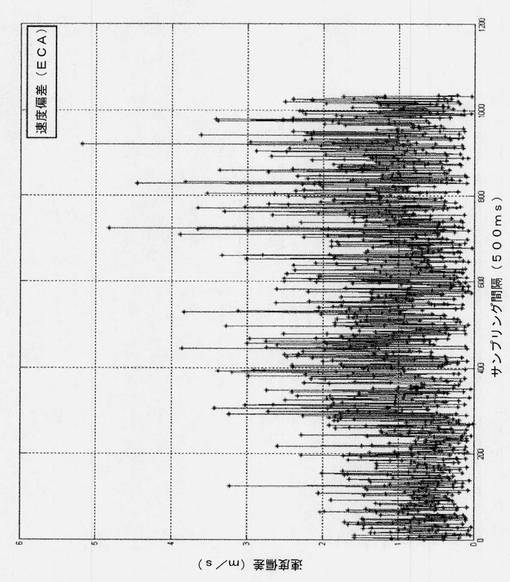
【図9】精度低下率(DOP)値が非常に大きい場合の、本発明に開示されたGPS受信機から獲得された速度偏差値を例証するグラフである。
【図10】本発明に開示されたGPS受信機及び従来の受信機によって計算された測位結果を例証する比較図である。
【発明を実施するための形態】
【0009】
その例が添付図面において例証される本開示の一実施例が、ここから詳細に参照されることになる。本開示が実施例と共に説明されることになる一方、それらが本開示をこれらの実施例に限定することを意図していないということが理解されるであろう。これに対して、本開示は、添付された請求項によって定義されたような本開示の精神及び範囲の中に含まれ得る代替物、修正物、及び等価物をカバーすることを意図している。
【0010】
更に、本開示の実施例の下記の詳細な説明において、多数の特定の詳細が本開示の完全な理解を行うために示される。しかしながら、本開示はこれらの特定の詳細なしで実施され得るということが、当業者によって認識されることになる。他の場合には、周知の方法、手続き、構成要素、及び回路は、本開示の実施例の特徴を不必要に不明瞭にしないように、詳細に説明されなかった。
【0011】
本開示による実施例は、移動情報判定装置を提供する。移動情報判定装置は、地球中心補助物(ECA)情報獲得モジュールと、高度情報及び位置情報保存モジュールと、移動情報計算モジュールとを備える。ECA情報獲得モジュールは、移動情報判定装置の現在位置における地球の半径を獲得する。高度情報及び位置情報保存モジュールは、移動情報判定装置の位置情報(例えば初期位置情報)及び高度情報を提供するように構成される。移動情報計算モジュールは、地球の半径及び複数の衛星が提供する複数の信号に基づいて、移動情報判定装置の現在位置及び/または速度を計算する。移動情報判定装置の詳細は、添付図面において説明されることになる。
【0012】
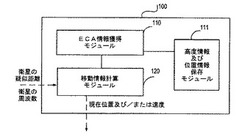
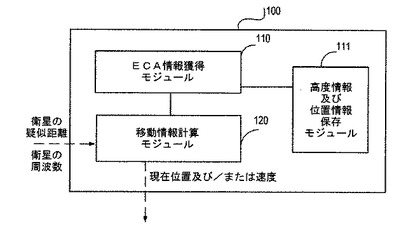
図1Aは、本開示の一実施例による、移動情報判定装置100を例証する。図1aにおいて示されたように、移動情報判定装置100は、地球中心補助物(ECA)情報獲得モジュール110と、高度情報及び位置情報保存モジュール111と、移動情報計算モジュール120とを備える。ECA情報獲得モジュール110は、移動情報判定装置100の位置における地球の半径を獲得するように構成される。高度情報及び位置情報保存モジュール111は、移動情報判定装置100の位置情報(例えば初期位置情報)及び移動情報判定装置100の高度情報を提供するように構成される。移動情報計算モジュール120は、上述の地球の半径及び少なくとも3個の衛星が提供する情報に基づいて、移動情報判定装置100の現在位置及び/または速度を計算するように構成される。これらの衛星が提供する情報は、移動情報判定装置100と各々の衛星との間の疑似距離(pseudo range:擬似距離)、及び/または、これらの衛星が提供するGPS信号の周波数を含む。
【0013】
ECA情報獲得モジュール110は、地球の平均半径を獲得するように構成される。地球の平均半径は、既知の方法によって外部環境から獲得され得るか、または、ECA情報獲得モジュール110に直接的に保存され得る。地球の平均半径は良く知られていると共に、地球の平均半径を獲得する方法は、当業者にとって明白であり、簡潔さ及び明瞭さのために、ここでは繰り返して説明されないであろう。ECA情報獲得モジュール110は、移動情報判定装置100の初期位置及び対応する高度情報に基づいて、移動情報判定装置100の位置における地球の半径を計算し得る。
【0014】
図1Bは、図1Aにおける移動情報判定装置100の詳細な構成図を示す。図1Aと同様の機能を有する要素は同じであると分類されると共に、簡潔さ及び明瞭さの目的のために、ここでは繰り返して説明されないであろう。高度情報及び位置情報保存モジュール111は、更に、初期位置確定及び管理モジュール130と、位置情報データベース140と、高度情報源150とを備える。
【0015】
初期位置確定及び管理モジュール130は、初期位置を確定するように構成される。初期位置確定及び管理モジュール130は、図2において説明された方法によって初期位置を確定すると共に、その方法が下記において詳細に説明されることになる。位置情報データベース140は、1番目の位置P0、初期位置Pcoarse、及び初期位置確定及び管理モジュール130によって最終的に計算された最も正確な位置を保存するように構成される。高度情報源150は、移動情報判定装置100の位置における対応する高度情報を保存する。
【0016】
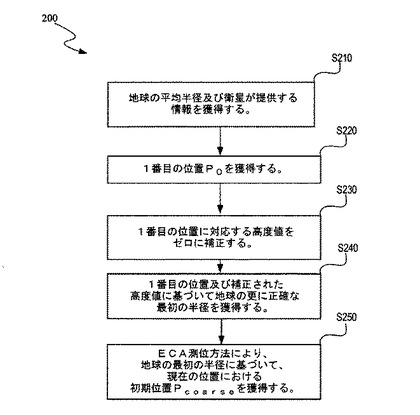
図2の例において示されるように、ブロックS210において、初期位置確定及び管理モジュール130は、地球の平均半径及び複数の衛星が提供する情報を獲得する。そして、ブロックS220において、地球の平均半径及び複数の衛星が提供する情報に基づいて、初期位置確定及び管理モジュール130は、移動情報判定装置100の1番目の位置P0を判定する。地球の平均半径及び複数の衛星が提供する情報に基づいて1番目の位置P0を計算するための詳細が、下記において説明されることになる。1番目の位置P0の誤差は、比較的大きい、例えば100Kmより大きい可能性がある。ブロックS230において、初期位置確定及び管理モジュール130は、高度情報源から獲得された地形または高度情報に従って、1番目の位置P0に対応する高度値を補正する。
【0017】
ブロックS240において、初期位置確定及び管理モジュール130は、1番目の位置P0及び補正された高度値に従って地球の更に正確な最初の半径を計算する。ブロックS250において、ECA測位方法が、ブロックS240において獲得された地球の更に正確な最初の半径に基づいて移動情報判定装置100の初期位置Pcoarseを獲得するために使用される。初期位置Pcoarseの誤差は、20Km位である。
【0018】
図2には示されないが、当業者は、何度もブロックS240及びS250において示されたステップを繰り返すことによって、更に正確な初期位置が計算され得ると理解するべきである。最も正確な位置を獲得するために、複数の反復によって計算された新しい位置は相互に比較され得ると共に、最も正確な位置が、所定の規則に基づいて、これらの位置の中から選択される。詳細な反復法(iteration method)は、ブロックS240及びS250における動作を繰り返して実行することによって実施され得る。例えば、初期位置Pcoarseは、最後の反復によって計算された位置であり得る。別の実施例において、初期位置Pcoarseは、複数の反復の各々によって計算された新しい位置を所定のしきい値と比較し、そして、指定された規則に従って最も正確な位置を選択することによって獲得され得る。初期位置を獲得するための詳細は、ここでは省略され得る。
【0019】
図2が初期位置を獲得する方法の例を例証すると共に、他の適当な方法が使用され得るということが理解されるべきである。例えば、初期位置Pcoarseは、従来の測位方法を使用すること、もしくは、移動情報判定装置100に以前に保存された位置情報を使用すること等によって、獲得され得る。本発明は、与えられた例に限定されない。
【0020】
一実施例において、位置情報データベース140は、1番目の位置P0、初期位置Pcoarse、及び最終的に計算された正確な位置を保存するように構成される。別の実施例において、移動情報判定装置100は、以前の位置を新しく計算された位置に置き換えるように構成された位置情報更新モジュール(図示せず)を更に備える。例えば、1番目の位置P0は、初期位置Pcoarseに置き換えられると共に、初期位置Pcoarseは、最終的に計算された正確な位置に置き換えられる。
【0021】
上述のように、本開示の一実施例による、高度情報源150を備える。一実施例において、高度情報源150は、優先順位(priority order)に従って使用される4種類の高度情報源を含む。より具体的には、高度情報源150は、(ECAに基づかずに)GPS受信機によって計算される高度情報を保存する第1の高度情報源と(移動情報判定装置100は、GPS受信機に統合される。)、GPS受信機に記録された以前の高度情報を保存する第2の高度情報源と、外部の高度測定源(例えば、高度計(altimeter)、気圧計(barometer)、または立体地図(three-dimensional map)等)から獲得された高度情報を保存する第3の高度情報源と、地球規模の高度情報(global altitude information)を保存する第4の高度情報源とを備える。第4の高度情報源は、地球規模の高度情報を保存する地球規模の高度情報データベースであると共に、移動情報判定装置100に統合される。一実施例において、第1の高度情報源は、1番目に高い使用優先順位を有しており、第2の高度情報源は、2番目に高い使用優先順位を有しており、第3の高度情報源は、3番目に高い使用優先順位を有しており、第4の高度情報源は、4番目に高い使用優先順位を有している。
【0022】
ECA情報獲得モジュール110は、地球の半径を計算するために、4種類の高度情報源の内の1つの中から高度値を選択し得る。別の実施例において、移動情報判定装置100は、更に高度情報源選択モジュール(図示せず)を備える。高度情報源選択モジュールは、上記の4種類の高度情報源から、ここから詳細に説明されることになる下記の方法において、高度値を選択するように構成される。
【0023】
(ECAに基づかずに)高度情報がGPS受信機によって計算される状況が、下記で詳細に説明されることになる。GPS受信機によって獲得された高度情報は、GPS受信機が保護されるか否かに拘らず、及び獲得された高度情報が比較的大きなジッタを有しているか否かに拘らず、信号環境、すなわちGPS受信機がGPS信号を受け取る環境によって影響を受ける。獲得された高度情報に関する移動平均を計算した後で、高度値は、実際の高度値に近くなる。本開示の一実施例によれば、GPS受信機が高度情報を計算する状況において、500秒の時間期間が選択されると共に、この500秒の時間期間の間、(GPS受信機に統合される)移動情報判定装置100によって実行される高度値の計算に、移動平均が使用される。従って、ECA計算のために使用される更に安定した高度値Aが獲得され得る。移動平均を計算するための時間期間は500秒に限定されないということが理解されるべきである。当業者は、移動平均のための時間期間が他の値として設定され得ると共に、ある例に限定されないと理解するべきである。
【0024】
本開示の一実施例において、移動平均は、50秒の時間期間の間にGPS受信機によって計算された高度値のために使用され得ると共に、従ってリアルタイムの、そして比較的安定した高度基準値Arefが獲得される。高度基準値Arefは、4種類の高度情報源を検査すると共に、対応する高度情報源からの高度値が使用するのに適当であるかどうかを判定するために使用される。同様に、リアルタイムの、そして比較的安定した高度基準を獲得するために、移動平均を計算するための時間期間は、50秒に限定されない。当業者は、高度値の安定性に従って異なる高度基準が使用され得ると理解するべきである。
【0025】
第1の高度情報源に保存される高度値Aを選択するかどうかに関する詳細が、下記で説明されることになる。もし高度値Aと高度基準値Arefとの間の差異が100mを超えているならば、高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。もし高度値Aに基づいてECA測位方法によって計算される高度値と高度値Aとの間の差異が50mを超えているならば、高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではないということが推論される。
【0026】
もし第1の高度情報源に保存される高度値Aが使用するのに適当ではないならば、高度値Aに基づいて計算された移動情報判定装置100の現在位置は、廃棄される。従って、ECA情報獲得モジュール110は、他の種類の高度情報源が提供する高度情報に基づいて現在位置を再計算する。一実施例において、ECA情報獲得モジュール110は、第2の高度情報源、第3の高度情報源、または第4の高度情報源が提供する高度情報に基づいて、現在位置を再計算する。
【0027】
GPS受信機に記録された以前の高度情報が説明されることになる。もしGPS受信機がGPS受信機の起動の前に配置されたならば、以前の測位情報(例えば、GPS受信機の以前の位置Phistorical、GPS受信機によって計算された以前の高度値A、及び以前の測位時間等)が、GPS受信機上のフラッシュメモリに保存されている。ここでは、GPS受信機によって計算されると共に第2の高度情報源に保存された以前の高度値Aが使用され得る。
【0028】
第2の高度情報源が提供する以前の高度値Aを選択するかどうかに関する詳細が、下記で説明されることになる。もし以前の高度値Aと高度基準値Arefとの間の差異が100mを超えているならば、以前の高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。もしECA測位方法によって計算される現在位置と予備(backup)の以前の位置Phistoricalとの間の差異が地球の表面上の都市範囲(40km)より大きいならば、以前の高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。及び/または、もし以前の高度値Aに基づいてECA測位方法によって計算される高度値と以前の高度値Aとの間の差異が50mを超えているならば、以前の高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。
【0029】
もし第2の高度情報源が提供する以前の高度値Aが使用するのに適当ではないならば、以前の高度値Aに基づいて計算された移動情報判定装置100の現在位置は、廃棄される。従って、ECA情報獲得モジュール110は、他の種類の高度情報源が提供する高度情報に基づいて現在位置を再計算する。一実施例において、ECA情報獲得モジュール110は、第3の高度情報源、または第4の高度情報源が提供する高度情報に基づいて、現在位置を再計算する。
【0030】
例えば、高度計(altimeter)、気圧計(barometer)、または立体地図(three-dimensional map)等のような外部の高度測定源から獲得される高度情報が説明されることになる。一実施例において、GPS受信機は、少なくとも1つの外部の高度測定源(例えば、高度計(altimeter)、気圧計(barometer)、または立体地図等)に結合されると共に、外部の高度測定源からリアルタイムで現在の高度値Aを獲得する。
【0031】
第3の高度情報源が提供する高度値Aを選択するかどうかに関する詳細が、下記で説明されることになる。もし高度値Aと高度基準値Arefとの間の差異が100mを超えているならば、その場合に、高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。もし第3の高度情報源が提供する高度値Aに基づいてECA測位方法によって計算される高度値と高度値Aとの間の差異が50mを超えているならば、その場合に、高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。
【0032】
もし第3の高度情報源が提供する高度値Aが使用するのに適当ではないならば、高度値Aに基づいて計算された移動情報判定装置100の現在位置は、廃棄される。従って、ECA情報獲得モジュール110は、他の種類の高度情報源に保存された高度情報に基づいて現在位置を再計算する。一実施例において、ECA情報獲得モジュール110は、第4の高度情報源が提供する高度情報に基づいて、現在位置を再計算する。
【0033】
第4の高度情報源が提供する高度情報が、下記で説明されることになる。地球規模の(global)高度情報は、GPS受信機の第4の高度情報源(地球規模の高度情報データベース)に保存される。地球規模の高度情報データベースは、地球の表面上の特定の位置、及び対応する高度値のような2種類の情報を含む。その情報が有益であるように、データベースを確立する場合のサンプル間隔は比較的長いと共に、従ってその誤差は比較的大きい。本開示では、都市の範囲における高度値の変化は比較的小さいと仮定されている。
【0034】
GPS受信機の初期位置Pcoarseは、地球規模の高度情報データベースから、地球の表面で最も初期位置Pcoarseに近いポジションPi、及び対応する高度値Aを検索するために使用される。
【0035】
地球規模の高度情報データベースが提供する高度値Aを選択するかどうかに関する詳細が、下記で説明されることになる。もしGPS受信機の初期位置Pcoarseと地球規模の高度情報データベースから検索された位置Piとの間の距離差が表面上の最大の都市範囲(60km)より大きいならば、地球規模の高度情報データベースにおいて、適当な高度情報は発見され得ない。
【0036】
もし地球規模の高度情報データベースに保存された高度値Aと高度基準値Arefとの間の差異が100mを超えているならば、高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。もしECA測位方法によって計算された現在位置と検索された位置Piとの間の距離差が都市範囲(40km)より大きいならば、高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。もし地球規模の高度情報データベースが提供する高度値Aに基づいてECA測位方法によって計算される高度値と高度値Aとの間の差異が50mを超えているならば、高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。
【0037】
もし高度情報データベースが提供する高度値Aが使用するのに適当ではないならば、その場合に、高度値Aに基づいて計算された移動情報判定装置100の現在位置は、廃棄される。
【0038】
図1Bの例において示されたように、ECA情報獲得モジュール110は、初期位置確定及び管理モジュール130から移動情報判定装置100の初期位置を獲得すると共に、高度情報源150から対応する高度値を獲得し、獲得された初期位置情報、及び対応する高度値に基づいて、移動情報判定装置100の位置における地球の半径を計算する。移動情報計算モジュール120は、地球の半径、及び衛星が提供する情報に基づいて、移動情報判定装置100の現在位置及び/または速度を判定する。
【0039】
移動情報判定装置100の初期位置情報及び対応する高度値に基づいて、地球の半径を計算するECA情報獲得モジュール110の例が、下記で説明されることになる。
【0040】
ECA情報獲得モジュール110は、初期位置確定及び管理モジュール130から、移動情報判定装置100の初期位置Pcoarseを獲得する。ECA情報獲得モジュール110は、更に、高度情報源150から、対応する高度値を獲得する。対応する地球の半径ρEが、下記の通り、方程式(1−1)、(1−2)、及び(1−3)に従って計算される。
【0041】
世界測地系(World Geodetic System:WGS)の座標系において、初期位置Pcoarseに対応する移動情報判定装置100の高度値は、下記のように設定される。
【0042】
【数1】

【0043】
Pcoarse_WGSは、WGS座標系における移動情報判定装置100の初期位置を表す。Aは、高度情報源150が提供する高度値を表す。WGS座標系は、経度、緯度、及び高度を含む三次元の座標系である。方程式(1−1)によれば、三次元の座標系の高度値は、高度情報源150から獲得された高度値によって置き換えられる。
【0044】
WGS座標系は、地球中心地球固定(Earth-centered Earth-fixed:ECEF)座標系に変換される。ECEF座標系において、移動情報判定装置100の初期位置Pcoarseは、下記のように補正される。
【0045】
【数2】
【0046】
WGSToECEF()は、GPSシステムにおいてWGS座標系をECEF座標系に変換する標準の変換式を表す。従って、地球の半径は、方程式(1−3)に従って計算されると共に、地球の計算された半径は、ECA計算のために使用される。
【0047】
【数3】
【0048】
前述の説明は、本開示による移動情報判定装置100の構成の実施例を例証する。移動情報判定装置100がECA情報獲得モジュール110から獲得された地球の半径に基づいてどのように測位を実行するかを例証する例が、下記で説明されることになる。
【0049】
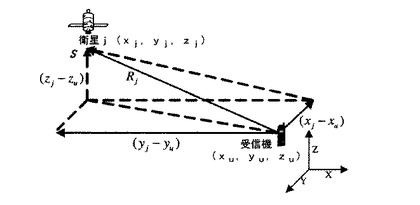
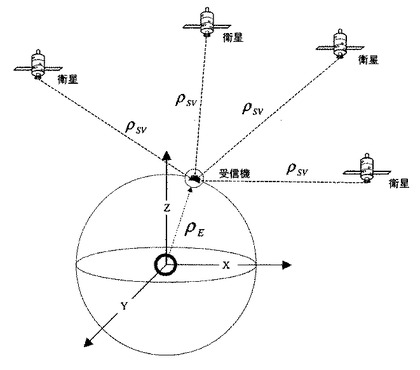
従来の受信機による測位するための方法が提供される。図3Aは、従来のGPSシステムの宇宙モジュール(space module)である。ρsvは、衛星からの受信機までの距離Rを示す。ECEF座標系において、GPS受信機Uの座標位置が(xu、yu、zu)として設定され、そして衛星Sjの座標位置が(xj、yj、zj)として設定される。その場合に、補正された疑似距離が、方程式(1−4)に従って計算される。
【0050】
【数4】
【0051】
ここで、j=1、2、・・・Nであり、jは、衛星のSVN(Satellite Vehicle Number)数、またはPRN(Pseudo-Random Noise)数ではなく、現在のところ有効な衛星による測定値の一時的な数である。||Sj−U||は、GPS受信機と衛星jとの間の幾何学的な距離を表し、cは、光の速度を表し、tuは、受信機のクロックバイアス(clock bias)を表す。ρjは、誤り訂正(error correction:EC)の後の疑似距離を表すと共に、受信機で測定される。図3Bにおいて示されるように、GPS受信機から衛星jまでの距離Rjは、方程式(1−5)に従って計算される。
【0052】
【数5】
【0053】
方程式(1−4)及び(1−5)に従って、下記のような非線形方程式(1−6)が、受信機の座標位置(xu、yu、zu)及びクロックバイアスを計算するために使用される。
【0054】
【数6】
【0055】
非線形方程式(1−6)は、最小二乗平均(Least Mean Squares:LMS)アルゴリズム、カルマン法(Kalman method)等によって解決され得る。非線形方程式を解決するための詳細は、簡潔さ及び明瞭さの目的のために、ここでは繰り返して説明されないであろう。
【0056】
本開示の一実施例による、移動情報判定装置100の現在位置を計算する方法が説明されることになる。上述のような衛星が提供する情報の他に、移動情報判定装置100は、現在位置を計算するために、ECA情報として、更に地球の半径を使用する。
【0057】
図3Cは、本開示の一実施例による、本発明によって提供される地球中心補助物(Earth Center Assistant:ECA)測位方法(positioning strategy)を利用する形態(topology)の例を例証する。図3aと比較して、地球の中心からGPS受信機までの点線が加えられる。点線は、移動情報判定装置100の位置における地球の半径ρEを表す。そして、地球の半径ρEは、この実施例におけるECA情報として使用される。
【0058】
ECA位置方法は、N番目の順番の非線形方程式(1−6)にECA測位方程式を加えることによって実施される(Nは整数であると共に、3に等しいか、もしくは3より大きい)。言い換えれば、地球の中心は、計算のための別の衛星、すなわち地球の中心における衛星と見なされる。
【0059】
地球の中心における衛星の座標位置は(0、0、0)として設定され、GPS受信機のクロックバイアスはtuであると共に、tuは0に設定され、ρEは地球の中心から受信機までの球の半径を表し、そして、
【数7】
は、高度情報源150と初期位置確定及び管理モジュール130を使用することによって獲得される。従って、ECA測位方法のための非線形方程式(1−7)が、下記のように記載される。
【0060】
【数8】
【0061】
非線形方程式(1−7)は、最小二乗平均(Least Mean Squares:LMS)アルゴリズム、カルマン法(Kalman method)等によって解決され得る。従って、移動情報判定装置100の現在の座標位置(xu、yu、zu)が、それに応じて計算される。
【0062】
本開示の一実施例によれば、ECA情報は、移動情報判定装置100による測位のために使用される。その結果、衛星の数が十分でない状況、または衛星からの信号が比較的強い干渉(interference:妨害)を有する状況において、位置精度が向上する。
【0063】
更に、移動情報判定装置100は、更に、地球の半径、及び衛星が提供する情報に基づいて、移動情報判定装置100の現在の速度を計算する。同様に、ECA情報獲得モジュール110は、移動情報判定装置100の初期位置及び対応する高度値に基づいて、地球の半径を計算する。上述のように、初期位置確定及び管理モジュール130は、地球の平均半径に基づいて、初期位置Pcoarseを確定し、初期位置Pcoarseに基づいて、移動情報判定装置100の位置における更に正確な半径を計算し、その次に、計算された地球の半径に従って、移動情報判定装置100の現在の速度を計算する。その代りに、現在の速度は、地球の平均半径を直接的に使用することによって計算され得る。地球の半径に従って現在の速度を計算するための方法が、下記で説明されることになる。
【0064】
従来のGPS受信機によって現在の速度を計算する方法が提供される。慣例上、その速度は、GPS受信機によって受信されたドップラー周波数に基づいて推定される。GPS受信機によって受信された信号に関するドップラー偏移(Doppler shift:ドップラーシフト)は、衛星と受信機との間の相対運動に起因している。GPS受信機によって受信された信号の周波数fRは、下記のように方程式(1−8)に従って計算され得る。
【0065】
【数9】
【0066】
ここで、fTは、衛星によって送信された搬送波信号の周波数を表し、Vは、衛星の速度ベクトルを表し、
【数10】
は、受信機の速度ベクトルを表し、Aは、GPS受信機から衛星までの方向を有する単位ベクトルを表し、そして、cは、光の速度を表す。
【0067】
j番目の衛星に関して、方程式(1−8)は、方程式(1−9)として説明され得る。
【0068】
【数11】
【0069】
j番目の衛星に関して、受信信号の周波数に関する測定推定(measurement estimation)は、fjである。測定推定は、誤差を有しており、そして更に、周波数バイアスfRjを有する。周波数バイアスは、GPSシステム時間を有するGPS受信機におけるクロックの時間シフト(time shift)tuと関連付けられている。時間シフトtuの単位は、秒/秒である。fjとfRjとの関係は、方程式(1−10)において示される。
【0070】
【数12】
【0071】
方程式(1−9)及び(1−10)を結合すると共に、代数処理の後では、下記のように方程式(1−11)が獲得される。
【0072】
【数13】
【0073】
ドット積ベクトルに関するベクトルコンポーネント拡張(vector component expansion)によって、下記のように方程式(1−12)が獲得される。
【0074】
【数14】
【0075】
方程式(1−12)の左側は、
【数15】
になる。なぜなら、
【数16】
の値が1に非常に近いからである。通常、
【数17】
と1との間の差異は、100万分の2、3(a few parts per million)であり得る。方程式(1−12)は、下記のように単純化され得る。
【0076】
【数18】
【0077】
4個の変数の方程式のセットが、下記のように、変数
【数19】
に関して確立される。
【0078】
【数20】
【0079】
その結果、速度及び時間シフトが、方程式(1−17)によって、下記のように獲得され得る。
【0080】
【数21】
【0081】
ここで、H−1は、行列Hの逆行列を表す。
【0082】
本開示の一実施例によれば、移動情報判定装置100内の移動情報計算モジュール120は、ECA情報に基づいて速度を計算するように構成される。すなわち、ECA速度計測方程式が、従来の方法の方程式に加えられる。
【0083】
地球の中心における衛星の座標位置が(0、0、0)、速度の値が0であり、そして周波数fEがゼロに等しいと仮定されている。従って、方程式(1−18)が、方程式(1−14)に従って獲得される。
【0084】
【数22】
【0085】
方程式(1−18)において、(axE、ayE、azE)は、地球中心の中心における衛星に対する移動情報判定装置100のベクトル演算ユニット(vector unit)の方向を表す。従って下記式のようになる。
【0086】
【数23】
【0087】
方程式(1−18)及び従来の方法の方程式によれば、4個の変数の方程式のセットが、下記のように、変数
【数24】
に関して確立される。
【0088】
【数25】
【0089】
その結果、速度及び時間シフトが、方程式(1−21)によって、下記のように獲得され得る。
【0090】
【数26】
【0091】
ここで、H−1は、行列Hの逆行列を表す。
【0092】
本開示の一実施例によれば、移動情報判定装置100は、更に、検出モジュール(図示せず)を備える。検出モジュールは、精度低下率(DOP)の値、衛星からの信号の強度に基づいて、移動情報判定装置100の計算された現在位置が有効であるかどうかを判定するように、そして、移動情報判定装置100の速度が運動モジュール(motion module)に適合するかどうかを判定するように構成される。
【0093】
1つの例において、移動情報判定装置100は、更に、選択モジュール(図示せず)を備える。選択モジュールは、移動情報判定装置100における移動情報計算モジュール120と連結される。DOPの値が不十分である状況では、衛星からの信号が弱いか、もしくは衛星の数が十分ではなく、選択モジュールは、各衛星が提供するGPS信号の測定された疑似距離及び/または周波数、そして地球の半径に基づいて、移動情報判定装置100が測位を行うと共に速度を測定するように選択する。しかしながら、地球の半径が利用可能ではない状況において、選択モジュールは、GPS受信機の位置及び/または速度を獲得するために、ベースバンド信号処理ユニットによって提供された各衛星が提供するGPS信号の測定された疑似距離及び/または周波数に基づいて、従来のGPS測位方法及び/または速度測定方法を選択する。更に、選択モジュールは、移動情報判定装置100の外部に配置され得る。装置に関する詳細は、当業者にとって明白であり得ると共に、実需に従って構成されることができ、そして前述の説明に限定されない。
【0094】
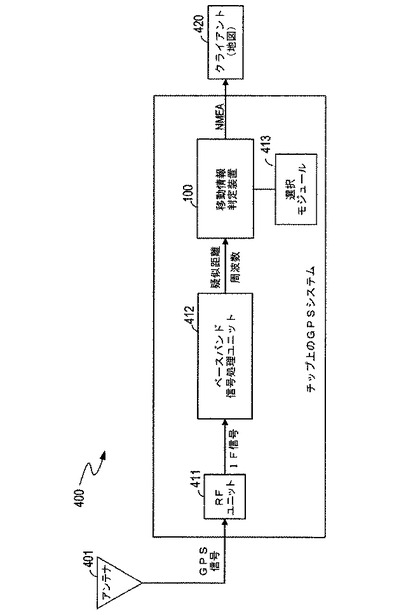
説明されているように、移動情報判定装置100は、GPS受信機400に統合され得る。図4において示されたように、GPS受信機400におけるRFユニット411は、アンテナ401からGPS信号を受信するように構成され、受信された信号を処理すると共に、信号を中間周波数信号に変換する。ベースバンド信号処理ユニット412は、周波数及び疑似距離を獲得するために、中間周波数信号を検波(demodulate:復調)して復号化(decode)するように構成される。移動情報判定装置100は、ベースバンド信号処理ユニット412から、衛星の疑似距離、及び衛星が提供するGPS信号の周波数を獲得し、上述の方法に従って、GPS受信機の位置、速度、及び時間(time)を計算する。その情報(例えばGPS受信機の位置、速度、及び時間情報等)は、米国海洋電子機器協会(National Marine Electronics Association:NMEA)コードの標準フォーマットを有する情報に変換されると共に、移動情報判定装置100によって出力される。その情報は、更に、例えば地図(map)として、クライアント端末420へ出力される。NMEAは、GPSシステムによって使用される出力プロトコルの内の1つである。
【0095】
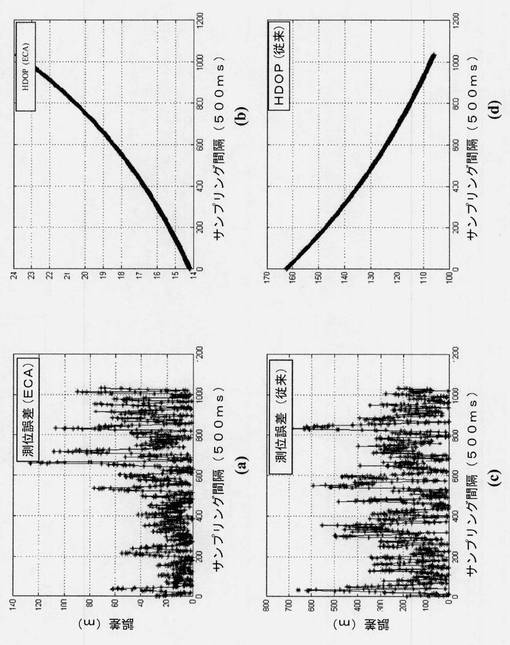
本発明のための衛星の数が従来の受信機のための衛星の数と同一である状況において、本開示において開示された受信機によって、従来の受信機より更に良い結果が獲得され得る。図6は、精度低下率(DOP)値が比較的大きい場合に、本発明に開示されたGPS受信機及び従来の受信機から獲得される測位誤差及び精度低下率(DOP)値の例を例証するいくらかのグラフを示す。図6(a)及び図6(b)において示されたように、DOP値は、本開示において開示されたGPS受信機によって減少し、従って測位誤差が減少する。図6(c)及び図6(d)において示されたように、従来の測位方法によって獲得された測位誤差のジッタは比較的大きく、測位誤差の最大偏差は600mを超えている。しかしながら、測位誤差の値は、ECA測位方法によって、100m未満になる。
【0096】
図7は、DOP値が比較的大きい場合に、本発明において開示されたGPS受信機及び従来の受信機から獲得された速度偏差の例を例証するグラフである。図7(a)及び図7(b)において示されたように、従来の受信機から獲得された速度偏差と比較すると、本発明において開示されたGPS受信機から獲得された速度偏差は減少する。従って、更に正確な計測速度が獲得される。
【0097】
図8は、DOP値が非常に大きい場合に、本発明において開示されたGPS受信機及び従来の受信機から獲得された測位誤差及びDOP値の例を例証するグラフである。図8において示されたように、図8(c)は空欄(blank)であり、従来の受信機において測位方法が集束(converge)し得ないことを例証する。図8(b)において示されたように、DOP値は、本開示において開示されたGPS受信機によって減少し、従って測位誤差が減少する。そして、(図8(a)において示されたように)測位が最終的に実行され得る。HDOPは、水平面の精度低下率を表す。
【0098】
図9は、DOP値が非常に大きい場合に、本発明において開示されたGPS受信機から獲得された速度偏差の例を例証するグラフである。DOP値が非常に大きい状況では、速度が従来の受信機によって測定されることはできない。
【0099】
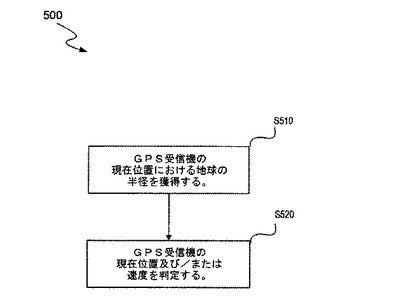
本開示の一実施例による、移動情報を計算するための方法が、下記で提供される。その方法は、受信機の現在位置及び/または速度を計算するために使用される。図5は、本開示の一実施例による、測位方法の例を例証するフローチャートである。図5において示されるように、図5は図1Bと一緒に説明され、ブロックS510において、GPS受信機の位置における地球の半径が獲得される。例えば、移動情報判定装置100の初期位置が、初期位置確定及び管理モジュール130から獲得されると共に、対応する高度情報が、高度情報源150から獲得され、そして、GPS受信機の位置における地球の半径が、初期位置及び対応する高度情報に基づいて計算される。ブロックS520において、GPS受信機の現在位置及び/または速度が、地球の半径、及び複数の衛星が提供する信号に基づいて判定される。
【0100】
地球の半径は、地球の平均半径であり得るか、または初期位置及び高度情報に基づいて計算された地球の半径であり得る。初期位置は、初期位置確定及び管理モジュールによって決定されると共に、高度情報は、使用の優先順位を有する4種類の高度情報源の内の1つから獲得される。地球の半径を計算するための詳細が上記で説明される。従って、初期位置を計算するステップは、地球の半径を獲得する前に実行され得る。初期位置を獲得するための詳細は、図2において示された方法として類似しており、簡潔さ及び明瞭さの目的のために、ここでは繰り返して説明されないであろう。
【0101】
上記の方法は、更新するステップを含むことができる。更新するステップは、最近計算された位置によって前の位置を更新するために使用される。例えば、一番目の位置P0は、初期位置Pcoarseと置き換えられると共に、初期位置Pcoarseは、最終的に計算される更に正確な位置と置き換えられる。
【0102】
上記の方法は、更に選択するステップを含むことができる。選択するステップは、使用の優先順位を有する4種類の高度情報源の中から高度情報源を選択するために使用される。高度情報源を選択するための詳細は、上記で説明されたと共に、簡潔さ及び明瞭さの目的のために、ここでは繰り返して説明されないであろう。
【0103】
上記の方法は、GPSシステムにおいて利用され得ると共に、選択するステップを含む。DOPが不十分である状況では、衛星信号が弱いか、もしくは衛星の数が十分ではなく、測位のための上記の方法を選択するために、選択するステップが使用される。しかしながら、地球の半径が利用可能ではないならば、従来のGPS測位方法が、ベースバンド信号処理ユニットによって提供された各衛星が提供するGPS信号の測定された疑似距離及び/または周波数を使用することによって、GPS受信機の位置及び/または速度を計算するために選択され得る。
【0104】
一実施例において、上記の方法は、GPSシステムにおいて利用され得ると共に、検査するステップを含むことができる。検査するステップは、DOP値、衛星が提供する信号の強度、及びGPS受信機の速度が運動モジュール(motion module)に適合するかどうか、に基づいて、最終的に計算された位置の妥当性を判定するために使用される。
【0105】
従来の方法と比較すると、本開示において開示された方法は、衛星の数が十分ではない状況において、または衛星からの信号が強い干渉(interference:妨害)を有する状況において、測位を実行することができ、そして、更に測位の正確度を増加させることができる。更に、衛星の数が同一である状況において、更に良い結果が獲得され得る。
【0106】
図10は、本開示において開示されたGPS受信機及び従来の受信機で計算された測位結果を例証する写真である。図10において示された例では、4個の衛星が使用される。図10において示されたように、黒に着色された部分(section)1002は、従来の方法で計算された結果を表し、白で着色された部分1004は、本開示において開示された方法で計算された結果を表す。図10において示された測位結果によれば、本開示において開示された方法は、従来の方法に対して、位置の精度において利点を有する。
【0107】
前述の説明及び図面が本発明の実施例を表す一方、添付された請求項において定義されたように、様々な追加、修正、及び置換が、本発明の原理の精神及び範囲からはずれずに、実行され得るということが理解されることになる。当業者は、本発明が、形式、構造、装置、比率、材料、要素、及びコンポーネントの多くの変更によって使用され得ると共に、そうでなければ、本発明の原理からはずれずに特定の環境及び動作条件に特に適応する本発明の実践において使用され得るということを認識することになる。ここで開示された実施例は、従って、全ての点で実例となると共に、限定的でないと考えられることができ、本発明の範囲は、添付された請求項及びそれらの法律上の等価物によって示されると共に、前述の説明に限定されない。
【符号の説明】
【0108】
100 移動情報判定装置
110 地球中心補助物(ECA)情報獲得モジュール
111 高度情報及び位置情報保存モジュール
120 移動情報計算モジュール
130 初期位置確定及び管理モジュール
140 位置情報データベース
150 高度情報源
400 GPS受信機
401 アンテナ
411 RFユニット
412 ベースバンド信号処理ユニット
413 選択モジュール
420 クライアント端末
【技術分野】
【0001】
本発明は、移動情報を判定するための移動情報判定装置、及び方法に関係する。
【背景技術】
【0002】
この出願は、参照することにより本書に含まれる、中華人民共和国の知識産権局(State Intellectual Property Office:SIPO)に2011年9月30日に出願された特許出願番号第201110306929.3号に対して優先権を主張する。
【発明の概要】
【発明が解決しようとする課題】
【0003】
全地球測位システム(GPS)のような従来の測位システム(positioning system)は、GPS受信機の位置を計算するために、少なくとも4つの衛星からの伝送距離を知ることを必要とし、そして最小二乗平均(Least Mean Squares:LMS)アルゴリズムを使用することによって、計算が行われる。しかしながら、もし伝送距離を測定することに利用可能な衛星の数が十分ではないならば、受信機の位置情報を獲得するために、従来のGPS測位方法(positioning method)を使用することは不可能である。更に、GPS信号に対する干渉(interference:妨害)(例えば、多重反射)、または不十分な衛星の幾何分布は、従来のGPS測位方法によって獲得された測位結果の正確度を大幅に減少し得る。例えば利用可能な衛星の数が4個未満であり、3個の衛星からのわずか3つの伝送距離が利用可能である場合の状況において、慣例上、一定の高度値が外部情報源から入力され、そして測位結果は二次元空間に関して計算される。しかしながら、高度値が適時に更新できないので、測位結果は、比較的大きな誤差を有する。
【課題を解決するための手段】
【0004】
本発明は、移動情報判定装置を開示する。前記移動情報判定装置は、地球中心補助物(Earth Center Assistant:ECA)情報獲得モジュールと、高度情報及び位置情報保存モジュールと、移動情報計算モジュールとを備える。前記ECA獲得モジュールは、前記移動情報判定装置の現在位置における地球の半径を獲得する。前記高度情報及び位置情報保存モジュールは、前記移動情報判定装置の位置情報(例えば初期位置情報)及び高度情報を提供するように構成される。前記移動情報計算モジュールは、前記地球の前記半径及び複数の衛星が提供する複数の信号に基づいて、前記移動情報判定装置の前記現在位置及び/または速度を計算する。
【0005】
別の実施例において、本発明は、全地球測位システムにおけるGPS受信機を開示する。前記GPS受信機は、移動情報判定装置と、ベースバンド信号処理ユニットとを備える。前記移動情報判定装置は、更に、前記移動情報判定装置の現在位置における地球の半径を獲得するための地球中心補助物(ECA)獲得モジュールと、前記移動情報判定装置の位置情報及び前記移動情報判定装置の高度情報を提供する高度情報及び位置情報保存モジュールと、前記地球の前記半径及び複数の衛星が提供する複数の信号に基づいて、前記移動情報判定装置の前記現在位置及び/または速度を計算する移動情報計算モジュールとを備える。前記ベースバンド信号処理ユニットは、前記移動情報判定装置に前記衛星からの信号を提供する。
【0006】
更にもう一つの実施例において、本発明は、GPS受信機を備えた対象物の移動情報を判定するための方法を開示する。前記方法は、高度情報及び位置情報保存モジュールにおいて、前記GPS受信機の初期位置情報及び高度情報を獲得するステップと、地球中心補助物(ECA)情報獲得モジュールにおいて、前記GPS受信機の前記初期位置情報及び前記高度情報に基づいて、前記GPS受信機の現在位置における地球の半径を獲得するステップと、移動情報計算モジュールにおいて、前記地球の前記半径及び複数の衛星が提供する複数の信号に基づいて、前記移動情報を計算するステップとを含み、前記移動情報は、前記受信機の前記現在位置及び速度の内の少なくとも1つを含む。
【0007】
本発明は、同じ参照符号が同等の要素を表す下記の図面が添付されることによって、下記の説明を考慮して、容易に理解されることになる。
【図面の簡単な説明】
【0008】
【図1A】本開示の一実施例による、移動情報判定装置の例を例証する構成図である。
【図1B】図1Aにおける移動情報判定装置の詳細な構成図を示す。
【図2】本開示の一実施例による、初期位置確定及び管理モジュールによって初期位置を確定する方法を例証するフローチャートである。
【図3A】従来のGPSシステムの実例である。
【図3B】本開示の一実施例による、移動情報判定装置から衛星までの観測ベクトルの例である。
【図3C】本開示の一実施例による、本発明によって提供される地球中心補助物(ECA)測位戦略(Earth center assistant (ECA) positioning strategy)を利用する形態(topology)の例である。
【図4】本開示の一実施例による、移動情報判定装置に統合されたGPS受信機の構成図である。
【図5】本開示の一実施例による、測位方法を例証するフローチャートである。
【図6】精度低下率(DOP)値が比較的大きい場合の、本発明に開示されたGPS受信機及び従来の受信機から獲得された測位誤差及び精度低下率(DOP)値を例証する4枚のグラフである。
【図7】精度低下率(DOP)値が比較的大きい場合の、本発明に開示されたGPS受信機及び従来の受信機から獲得された速度偏差値を例証する2枚のグラフである。
【図8】精度低下率(DOP)値が非常に大きい場合の、本発明に開示されたGPS受信機及び従来の受信機から獲得された測位誤差及び精度低下率(DOP)値を例証する4枚のグラフである。
【図9】精度低下率(DOP)値が非常に大きい場合の、本発明に開示されたGPS受信機から獲得された速度偏差値を例証するグラフである。
【図10】本発明に開示されたGPS受信機及び従来の受信機によって計算された測位結果を例証する比較図である。
【発明を実施するための形態】
【0009】
その例が添付図面において例証される本開示の一実施例が、ここから詳細に参照されることになる。本開示が実施例と共に説明されることになる一方、それらが本開示をこれらの実施例に限定することを意図していないということが理解されるであろう。これに対して、本開示は、添付された請求項によって定義されたような本開示の精神及び範囲の中に含まれ得る代替物、修正物、及び等価物をカバーすることを意図している。
【0010】
更に、本開示の実施例の下記の詳細な説明において、多数の特定の詳細が本開示の完全な理解を行うために示される。しかしながら、本開示はこれらの特定の詳細なしで実施され得るということが、当業者によって認識されることになる。他の場合には、周知の方法、手続き、構成要素、及び回路は、本開示の実施例の特徴を不必要に不明瞭にしないように、詳細に説明されなかった。
【0011】
本開示による実施例は、移動情報判定装置を提供する。移動情報判定装置は、地球中心補助物(ECA)情報獲得モジュールと、高度情報及び位置情報保存モジュールと、移動情報計算モジュールとを備える。ECA情報獲得モジュールは、移動情報判定装置の現在位置における地球の半径を獲得する。高度情報及び位置情報保存モジュールは、移動情報判定装置の位置情報(例えば初期位置情報)及び高度情報を提供するように構成される。移動情報計算モジュールは、地球の半径及び複数の衛星が提供する複数の信号に基づいて、移動情報判定装置の現在位置及び/または速度を計算する。移動情報判定装置の詳細は、添付図面において説明されることになる。
【0012】
図1Aは、本開示の一実施例による、移動情報判定装置100を例証する。図1aにおいて示されたように、移動情報判定装置100は、地球中心補助物(ECA)情報獲得モジュール110と、高度情報及び位置情報保存モジュール111と、移動情報計算モジュール120とを備える。ECA情報獲得モジュール110は、移動情報判定装置100の位置における地球の半径を獲得するように構成される。高度情報及び位置情報保存モジュール111は、移動情報判定装置100の位置情報(例えば初期位置情報)及び移動情報判定装置100の高度情報を提供するように構成される。移動情報計算モジュール120は、上述の地球の半径及び少なくとも3個の衛星が提供する情報に基づいて、移動情報判定装置100の現在位置及び/または速度を計算するように構成される。これらの衛星が提供する情報は、移動情報判定装置100と各々の衛星との間の疑似距離(pseudo range:擬似距離)、及び/または、これらの衛星が提供するGPS信号の周波数を含む。
【0013】
ECA情報獲得モジュール110は、地球の平均半径を獲得するように構成される。地球の平均半径は、既知の方法によって外部環境から獲得され得るか、または、ECA情報獲得モジュール110に直接的に保存され得る。地球の平均半径は良く知られていると共に、地球の平均半径を獲得する方法は、当業者にとって明白であり、簡潔さ及び明瞭さのために、ここでは繰り返して説明されないであろう。ECA情報獲得モジュール110は、移動情報判定装置100の初期位置及び対応する高度情報に基づいて、移動情報判定装置100の位置における地球の半径を計算し得る。
【0014】
図1Bは、図1Aにおける移動情報判定装置100の詳細な構成図を示す。図1Aと同様の機能を有する要素は同じであると分類されると共に、簡潔さ及び明瞭さの目的のために、ここでは繰り返して説明されないであろう。高度情報及び位置情報保存モジュール111は、更に、初期位置確定及び管理モジュール130と、位置情報データベース140と、高度情報源150とを備える。
【0015】
初期位置確定及び管理モジュール130は、初期位置を確定するように構成される。初期位置確定及び管理モジュール130は、図2において説明された方法によって初期位置を確定すると共に、その方法が下記において詳細に説明されることになる。位置情報データベース140は、1番目の位置P0、初期位置Pcoarse、及び初期位置確定及び管理モジュール130によって最終的に計算された最も正確な位置を保存するように構成される。高度情報源150は、移動情報判定装置100の位置における対応する高度情報を保存する。
【0016】
図2の例において示されるように、ブロックS210において、初期位置確定及び管理モジュール130は、地球の平均半径及び複数の衛星が提供する情報を獲得する。そして、ブロックS220において、地球の平均半径及び複数の衛星が提供する情報に基づいて、初期位置確定及び管理モジュール130は、移動情報判定装置100の1番目の位置P0を判定する。地球の平均半径及び複数の衛星が提供する情報に基づいて1番目の位置P0を計算するための詳細が、下記において説明されることになる。1番目の位置P0の誤差は、比較的大きい、例えば100Kmより大きい可能性がある。ブロックS230において、初期位置確定及び管理モジュール130は、高度情報源から獲得された地形または高度情報に従って、1番目の位置P0に対応する高度値を補正する。
【0017】
ブロックS240において、初期位置確定及び管理モジュール130は、1番目の位置P0及び補正された高度値に従って地球の更に正確な最初の半径を計算する。ブロックS250において、ECA測位方法が、ブロックS240において獲得された地球の更に正確な最初の半径に基づいて移動情報判定装置100の初期位置Pcoarseを獲得するために使用される。初期位置Pcoarseの誤差は、20Km位である。
【0018】
図2には示されないが、当業者は、何度もブロックS240及びS250において示されたステップを繰り返すことによって、更に正確な初期位置が計算され得ると理解するべきである。最も正確な位置を獲得するために、複数の反復によって計算された新しい位置は相互に比較され得ると共に、最も正確な位置が、所定の規則に基づいて、これらの位置の中から選択される。詳細な反復法(iteration method)は、ブロックS240及びS250における動作を繰り返して実行することによって実施され得る。例えば、初期位置Pcoarseは、最後の反復によって計算された位置であり得る。別の実施例において、初期位置Pcoarseは、複数の反復の各々によって計算された新しい位置を所定のしきい値と比較し、そして、指定された規則に従って最も正確な位置を選択することによって獲得され得る。初期位置を獲得するための詳細は、ここでは省略され得る。
【0019】
図2が初期位置を獲得する方法の例を例証すると共に、他の適当な方法が使用され得るということが理解されるべきである。例えば、初期位置Pcoarseは、従来の測位方法を使用すること、もしくは、移動情報判定装置100に以前に保存された位置情報を使用すること等によって、獲得され得る。本発明は、与えられた例に限定されない。
【0020】
一実施例において、位置情報データベース140は、1番目の位置P0、初期位置Pcoarse、及び最終的に計算された正確な位置を保存するように構成される。別の実施例において、移動情報判定装置100は、以前の位置を新しく計算された位置に置き換えるように構成された位置情報更新モジュール(図示せず)を更に備える。例えば、1番目の位置P0は、初期位置Pcoarseに置き換えられると共に、初期位置Pcoarseは、最終的に計算された正確な位置に置き換えられる。
【0021】
上述のように、本開示の一実施例による、高度情報源150を備える。一実施例において、高度情報源150は、優先順位(priority order)に従って使用される4種類の高度情報源を含む。より具体的には、高度情報源150は、(ECAに基づかずに)GPS受信機によって計算される高度情報を保存する第1の高度情報源と(移動情報判定装置100は、GPS受信機に統合される。)、GPS受信機に記録された以前の高度情報を保存する第2の高度情報源と、外部の高度測定源(例えば、高度計(altimeter)、気圧計(barometer)、または立体地図(three-dimensional map)等)から獲得された高度情報を保存する第3の高度情報源と、地球規模の高度情報(global altitude information)を保存する第4の高度情報源とを備える。第4の高度情報源は、地球規模の高度情報を保存する地球規模の高度情報データベースであると共に、移動情報判定装置100に統合される。一実施例において、第1の高度情報源は、1番目に高い使用優先順位を有しており、第2の高度情報源は、2番目に高い使用優先順位を有しており、第3の高度情報源は、3番目に高い使用優先順位を有しており、第4の高度情報源は、4番目に高い使用優先順位を有している。
【0022】
ECA情報獲得モジュール110は、地球の半径を計算するために、4種類の高度情報源の内の1つの中から高度値を選択し得る。別の実施例において、移動情報判定装置100は、更に高度情報源選択モジュール(図示せず)を備える。高度情報源選択モジュールは、上記の4種類の高度情報源から、ここから詳細に説明されることになる下記の方法において、高度値を選択するように構成される。
【0023】
(ECAに基づかずに)高度情報がGPS受信機によって計算される状況が、下記で詳細に説明されることになる。GPS受信機によって獲得された高度情報は、GPS受信機が保護されるか否かに拘らず、及び獲得された高度情報が比較的大きなジッタを有しているか否かに拘らず、信号環境、すなわちGPS受信機がGPS信号を受け取る環境によって影響を受ける。獲得された高度情報に関する移動平均を計算した後で、高度値は、実際の高度値に近くなる。本開示の一実施例によれば、GPS受信機が高度情報を計算する状況において、500秒の時間期間が選択されると共に、この500秒の時間期間の間、(GPS受信機に統合される)移動情報判定装置100によって実行される高度値の計算に、移動平均が使用される。従って、ECA計算のために使用される更に安定した高度値Aが獲得され得る。移動平均を計算するための時間期間は500秒に限定されないということが理解されるべきである。当業者は、移動平均のための時間期間が他の値として設定され得ると共に、ある例に限定されないと理解するべきである。
【0024】
本開示の一実施例において、移動平均は、50秒の時間期間の間にGPS受信機によって計算された高度値のために使用され得ると共に、従ってリアルタイムの、そして比較的安定した高度基準値Arefが獲得される。高度基準値Arefは、4種類の高度情報源を検査すると共に、対応する高度情報源からの高度値が使用するのに適当であるかどうかを判定するために使用される。同様に、リアルタイムの、そして比較的安定した高度基準を獲得するために、移動平均を計算するための時間期間は、50秒に限定されない。当業者は、高度値の安定性に従って異なる高度基準が使用され得ると理解するべきである。
【0025】
第1の高度情報源に保存される高度値Aを選択するかどうかに関する詳細が、下記で説明されることになる。もし高度値Aと高度基準値Arefとの間の差異が100mを超えているならば、高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。もし高度値Aに基づいてECA測位方法によって計算される高度値と高度値Aとの間の差異が50mを超えているならば、高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではないということが推論される。
【0026】
もし第1の高度情報源に保存される高度値Aが使用するのに適当ではないならば、高度値Aに基づいて計算された移動情報判定装置100の現在位置は、廃棄される。従って、ECA情報獲得モジュール110は、他の種類の高度情報源が提供する高度情報に基づいて現在位置を再計算する。一実施例において、ECA情報獲得モジュール110は、第2の高度情報源、第3の高度情報源、または第4の高度情報源が提供する高度情報に基づいて、現在位置を再計算する。
【0027】
GPS受信機に記録された以前の高度情報が説明されることになる。もしGPS受信機がGPS受信機の起動の前に配置されたならば、以前の測位情報(例えば、GPS受信機の以前の位置Phistorical、GPS受信機によって計算された以前の高度値A、及び以前の測位時間等)が、GPS受信機上のフラッシュメモリに保存されている。ここでは、GPS受信機によって計算されると共に第2の高度情報源に保存された以前の高度値Aが使用され得る。
【0028】
第2の高度情報源が提供する以前の高度値Aを選択するかどうかに関する詳細が、下記で説明されることになる。もし以前の高度値Aと高度基準値Arefとの間の差異が100mを超えているならば、以前の高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。もしECA測位方法によって計算される現在位置と予備(backup)の以前の位置Phistoricalとの間の差異が地球の表面上の都市範囲(40km)より大きいならば、以前の高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。及び/または、もし以前の高度値Aに基づいてECA測位方法によって計算される高度値と以前の高度値Aとの間の差異が50mを超えているならば、以前の高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。
【0029】
もし第2の高度情報源が提供する以前の高度値Aが使用するのに適当ではないならば、以前の高度値Aに基づいて計算された移動情報判定装置100の現在位置は、廃棄される。従って、ECA情報獲得モジュール110は、他の種類の高度情報源が提供する高度情報に基づいて現在位置を再計算する。一実施例において、ECA情報獲得モジュール110は、第3の高度情報源、または第4の高度情報源が提供する高度情報に基づいて、現在位置を再計算する。
【0030】
例えば、高度計(altimeter)、気圧計(barometer)、または立体地図(three-dimensional map)等のような外部の高度測定源から獲得される高度情報が説明されることになる。一実施例において、GPS受信機は、少なくとも1つの外部の高度測定源(例えば、高度計(altimeter)、気圧計(barometer)、または立体地図等)に結合されると共に、外部の高度測定源からリアルタイムで現在の高度値Aを獲得する。
【0031】
第3の高度情報源が提供する高度値Aを選択するかどうかに関する詳細が、下記で説明されることになる。もし高度値Aと高度基準値Arefとの間の差異が100mを超えているならば、その場合に、高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。もし第3の高度情報源が提供する高度値Aに基づいてECA測位方法によって計算される高度値と高度値Aとの間の差異が50mを超えているならば、その場合に、高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。
【0032】
もし第3の高度情報源が提供する高度値Aが使用するのに適当ではないならば、高度値Aに基づいて計算された移動情報判定装置100の現在位置は、廃棄される。従って、ECA情報獲得モジュール110は、他の種類の高度情報源に保存された高度情報に基づいて現在位置を再計算する。一実施例において、ECA情報獲得モジュール110は、第4の高度情報源が提供する高度情報に基づいて、現在位置を再計算する。
【0033】
第4の高度情報源が提供する高度情報が、下記で説明されることになる。地球規模の(global)高度情報は、GPS受信機の第4の高度情報源(地球規模の高度情報データベース)に保存される。地球規模の高度情報データベースは、地球の表面上の特定の位置、及び対応する高度値のような2種類の情報を含む。その情報が有益であるように、データベースを確立する場合のサンプル間隔は比較的長いと共に、従ってその誤差は比較的大きい。本開示では、都市の範囲における高度値の変化は比較的小さいと仮定されている。
【0034】
GPS受信機の初期位置Pcoarseは、地球規模の高度情報データベースから、地球の表面で最も初期位置Pcoarseに近いポジションPi、及び対応する高度値Aを検索するために使用される。
【0035】
地球規模の高度情報データベースが提供する高度値Aを選択するかどうかに関する詳細が、下記で説明されることになる。もしGPS受信機の初期位置Pcoarseと地球規模の高度情報データベースから検索された位置Piとの間の距離差が表面上の最大の都市範囲(60km)より大きいならば、地球規模の高度情報データベースにおいて、適当な高度情報は発見され得ない。
【0036】
もし地球規模の高度情報データベースに保存された高度値Aと高度基準値Arefとの間の差異が100mを超えているならば、高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。もしECA測位方法によって計算された現在位置と検索された位置Piとの間の距離差が都市範囲(40km)より大きいならば、高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。もし地球規模の高度情報データベースが提供する高度値Aに基づいてECA測位方法によって計算される高度値と高度値Aとの間の差異が50mを超えているならば、高度値Aは、比較的大きな誤差を有する高度値と見なされると共に、使用するのに適当ではない。
【0037】
もし高度情報データベースが提供する高度値Aが使用するのに適当ではないならば、その場合に、高度値Aに基づいて計算された移動情報判定装置100の現在位置は、廃棄される。
【0038】
図1Bの例において示されたように、ECA情報獲得モジュール110は、初期位置確定及び管理モジュール130から移動情報判定装置100の初期位置を獲得すると共に、高度情報源150から対応する高度値を獲得し、獲得された初期位置情報、及び対応する高度値に基づいて、移動情報判定装置100の位置における地球の半径を計算する。移動情報計算モジュール120は、地球の半径、及び衛星が提供する情報に基づいて、移動情報判定装置100の現在位置及び/または速度を判定する。
【0039】
移動情報判定装置100の初期位置情報及び対応する高度値に基づいて、地球の半径を計算するECA情報獲得モジュール110の例が、下記で説明されることになる。
【0040】
ECA情報獲得モジュール110は、初期位置確定及び管理モジュール130から、移動情報判定装置100の初期位置Pcoarseを獲得する。ECA情報獲得モジュール110は、更に、高度情報源150から、対応する高度値を獲得する。対応する地球の半径ρEが、下記の通り、方程式(1−1)、(1−2)、及び(1−3)に従って計算される。
【0041】
世界測地系(World Geodetic System:WGS)の座標系において、初期位置Pcoarseに対応する移動情報判定装置100の高度値は、下記のように設定される。
【0042】
【数1】
【0043】
Pcoarse_WGSは、WGS座標系における移動情報判定装置100の初期位置を表す。Aは、高度情報源150が提供する高度値を表す。WGS座標系は、経度、緯度、及び高度を含む三次元の座標系である。方程式(1−1)によれば、三次元の座標系の高度値は、高度情報源150から獲得された高度値によって置き換えられる。
【0044】
WGS座標系は、地球中心地球固定(Earth-centered Earth-fixed:ECEF)座標系に変換される。ECEF座標系において、移動情報判定装置100の初期位置Pcoarseは、下記のように補正される。
【0045】
【数2】
【0046】
WGSToECEF()は、GPSシステムにおいてWGS座標系をECEF座標系に変換する標準の変換式を表す。従って、地球の半径は、方程式(1−3)に従って計算されると共に、地球の計算された半径は、ECA計算のために使用される。
【0047】
【数3】
【0048】
前述の説明は、本開示による移動情報判定装置100の構成の実施例を例証する。移動情報判定装置100がECA情報獲得モジュール110から獲得された地球の半径に基づいてどのように測位を実行するかを例証する例が、下記で説明されることになる。
【0049】
従来の受信機による測位するための方法が提供される。図3Aは、従来のGPSシステムの宇宙モジュール(space module)である。ρsvは、衛星からの受信機までの距離Rを示す。ECEF座標系において、GPS受信機Uの座標位置が(xu、yu、zu)として設定され、そして衛星Sjの座標位置が(xj、yj、zj)として設定される。その場合に、補正された疑似距離が、方程式(1−4)に従って計算される。
【0050】
【数4】
【0051】
ここで、j=1、2、・・・Nであり、jは、衛星のSVN(Satellite Vehicle Number)数、またはPRN(Pseudo-Random Noise)数ではなく、現在のところ有効な衛星による測定値の一時的な数である。||Sj−U||は、GPS受信機と衛星jとの間の幾何学的な距離を表し、cは、光の速度を表し、tuは、受信機のクロックバイアス(clock bias)を表す。ρjは、誤り訂正(error correction:EC)の後の疑似距離を表すと共に、受信機で測定される。図3Bにおいて示されるように、GPS受信機から衛星jまでの距離Rjは、方程式(1−5)に従って計算される。
【0052】
【数5】
【0053】
方程式(1−4)及び(1−5)に従って、下記のような非線形方程式(1−6)が、受信機の座標位置(xu、yu、zu)及びクロックバイアスを計算するために使用される。
【0054】
【数6】
【0055】
非線形方程式(1−6)は、最小二乗平均(Least Mean Squares:LMS)アルゴリズム、カルマン法(Kalman method)等によって解決され得る。非線形方程式を解決するための詳細は、簡潔さ及び明瞭さの目的のために、ここでは繰り返して説明されないであろう。
【0056】
本開示の一実施例による、移動情報判定装置100の現在位置を計算する方法が説明されることになる。上述のような衛星が提供する情報の他に、移動情報判定装置100は、現在位置を計算するために、ECA情報として、更に地球の半径を使用する。
【0057】
図3Cは、本開示の一実施例による、本発明によって提供される地球中心補助物(Earth Center Assistant:ECA)測位方法(positioning strategy)を利用する形態(topology)の例を例証する。図3aと比較して、地球の中心からGPS受信機までの点線が加えられる。点線は、移動情報判定装置100の位置における地球の半径ρEを表す。そして、地球の半径ρEは、この実施例におけるECA情報として使用される。
【0058】
ECA位置方法は、N番目の順番の非線形方程式(1−6)にECA測位方程式を加えることによって実施される(Nは整数であると共に、3に等しいか、もしくは3より大きい)。言い換えれば、地球の中心は、計算のための別の衛星、すなわち地球の中心における衛星と見なされる。
【0059】
地球の中心における衛星の座標位置は(0、0、0)として設定され、GPS受信機のクロックバイアスはtuであると共に、tuは0に設定され、ρEは地球の中心から受信機までの球の半径を表し、そして、
【数7】
は、高度情報源150と初期位置確定及び管理モジュール130を使用することによって獲得される。従って、ECA測位方法のための非線形方程式(1−7)が、下記のように記載される。
【0060】
【数8】
【0061】
非線形方程式(1−7)は、最小二乗平均(Least Mean Squares:LMS)アルゴリズム、カルマン法(Kalman method)等によって解決され得る。従って、移動情報判定装置100の現在の座標位置(xu、yu、zu)が、それに応じて計算される。
【0062】
本開示の一実施例によれば、ECA情報は、移動情報判定装置100による測位のために使用される。その結果、衛星の数が十分でない状況、または衛星からの信号が比較的強い干渉(interference:妨害)を有する状況において、位置精度が向上する。
【0063】
更に、移動情報判定装置100は、更に、地球の半径、及び衛星が提供する情報に基づいて、移動情報判定装置100の現在の速度を計算する。同様に、ECA情報獲得モジュール110は、移動情報判定装置100の初期位置及び対応する高度値に基づいて、地球の半径を計算する。上述のように、初期位置確定及び管理モジュール130は、地球の平均半径に基づいて、初期位置Pcoarseを確定し、初期位置Pcoarseに基づいて、移動情報判定装置100の位置における更に正確な半径を計算し、その次に、計算された地球の半径に従って、移動情報判定装置100の現在の速度を計算する。その代りに、現在の速度は、地球の平均半径を直接的に使用することによって計算され得る。地球の半径に従って現在の速度を計算するための方法が、下記で説明されることになる。
【0064】
従来のGPS受信機によって現在の速度を計算する方法が提供される。慣例上、その速度は、GPS受信機によって受信されたドップラー周波数に基づいて推定される。GPS受信機によって受信された信号に関するドップラー偏移(Doppler shift:ドップラーシフト)は、衛星と受信機との間の相対運動に起因している。GPS受信機によって受信された信号の周波数fRは、下記のように方程式(1−8)に従って計算され得る。
【0065】
【数9】
【0066】
ここで、fTは、衛星によって送信された搬送波信号の周波数を表し、Vは、衛星の速度ベクトルを表し、
【数10】
は、受信機の速度ベクトルを表し、Aは、GPS受信機から衛星までの方向を有する単位ベクトルを表し、そして、cは、光の速度を表す。
【0067】
j番目の衛星に関して、方程式(1−8)は、方程式(1−9)として説明され得る。
【0068】
【数11】
【0069】
j番目の衛星に関して、受信信号の周波数に関する測定推定(measurement estimation)は、fjである。測定推定は、誤差を有しており、そして更に、周波数バイアスfRjを有する。周波数バイアスは、GPSシステム時間を有するGPS受信機におけるクロックの時間シフト(time shift)tuと関連付けられている。時間シフトtuの単位は、秒/秒である。fjとfRjとの関係は、方程式(1−10)において示される。
【0070】
【数12】
【0071】
方程式(1−9)及び(1−10)を結合すると共に、代数処理の後では、下記のように方程式(1−11)が獲得される。
【0072】
【数13】
【0073】
ドット積ベクトルに関するベクトルコンポーネント拡張(vector component expansion)によって、下記のように方程式(1−12)が獲得される。
【0074】
【数14】
【0075】
方程式(1−12)の左側は、
【数15】
になる。なぜなら、
【数16】
の値が1に非常に近いからである。通常、
【数17】
と1との間の差異は、100万分の2、3(a few parts per million)であり得る。方程式(1−12)は、下記のように単純化され得る。
【0076】
【数18】
【0077】
4個の変数の方程式のセットが、下記のように、変数
【数19】
に関して確立される。
【0078】
【数20】
【0079】
その結果、速度及び時間シフトが、方程式(1−17)によって、下記のように獲得され得る。
【0080】
【数21】
【0081】
ここで、H−1は、行列Hの逆行列を表す。
【0082】
本開示の一実施例によれば、移動情報判定装置100内の移動情報計算モジュール120は、ECA情報に基づいて速度を計算するように構成される。すなわち、ECA速度計測方程式が、従来の方法の方程式に加えられる。
【0083】
地球の中心における衛星の座標位置が(0、0、0)、速度の値が0であり、そして周波数fEがゼロに等しいと仮定されている。従って、方程式(1−18)が、方程式(1−14)に従って獲得される。
【0084】
【数22】
【0085】
方程式(1−18)において、(axE、ayE、azE)は、地球中心の中心における衛星に対する移動情報判定装置100のベクトル演算ユニット(vector unit)の方向を表す。従って下記式のようになる。
【0086】
【数23】
【0087】
方程式(1−18)及び従来の方法の方程式によれば、4個の変数の方程式のセットが、下記のように、変数
【数24】
に関して確立される。
【0088】
【数25】
【0089】
その結果、速度及び時間シフトが、方程式(1−21)によって、下記のように獲得され得る。
【0090】
【数26】
【0091】
ここで、H−1は、行列Hの逆行列を表す。
【0092】
本開示の一実施例によれば、移動情報判定装置100は、更に、検出モジュール(図示せず)を備える。検出モジュールは、精度低下率(DOP)の値、衛星からの信号の強度に基づいて、移動情報判定装置100の計算された現在位置が有効であるかどうかを判定するように、そして、移動情報判定装置100の速度が運動モジュール(motion module)に適合するかどうかを判定するように構成される。
【0093】
1つの例において、移動情報判定装置100は、更に、選択モジュール(図示せず)を備える。選択モジュールは、移動情報判定装置100における移動情報計算モジュール120と連結される。DOPの値が不十分である状況では、衛星からの信号が弱いか、もしくは衛星の数が十分ではなく、選択モジュールは、各衛星が提供するGPS信号の測定された疑似距離及び/または周波数、そして地球の半径に基づいて、移動情報判定装置100が測位を行うと共に速度を測定するように選択する。しかしながら、地球の半径が利用可能ではない状況において、選択モジュールは、GPS受信機の位置及び/または速度を獲得するために、ベースバンド信号処理ユニットによって提供された各衛星が提供するGPS信号の測定された疑似距離及び/または周波数に基づいて、従来のGPS測位方法及び/または速度測定方法を選択する。更に、選択モジュールは、移動情報判定装置100の外部に配置され得る。装置に関する詳細は、当業者にとって明白であり得ると共に、実需に従って構成されることができ、そして前述の説明に限定されない。
【0094】
説明されているように、移動情報判定装置100は、GPS受信機400に統合され得る。図4において示されたように、GPS受信機400におけるRFユニット411は、アンテナ401からGPS信号を受信するように構成され、受信された信号を処理すると共に、信号を中間周波数信号に変換する。ベースバンド信号処理ユニット412は、周波数及び疑似距離を獲得するために、中間周波数信号を検波(demodulate:復調)して復号化(decode)するように構成される。移動情報判定装置100は、ベースバンド信号処理ユニット412から、衛星の疑似距離、及び衛星が提供するGPS信号の周波数を獲得し、上述の方法に従って、GPS受信機の位置、速度、及び時間(time)を計算する。その情報(例えばGPS受信機の位置、速度、及び時間情報等)は、米国海洋電子機器協会(National Marine Electronics Association:NMEA)コードの標準フォーマットを有する情報に変換されると共に、移動情報判定装置100によって出力される。その情報は、更に、例えば地図(map)として、クライアント端末420へ出力される。NMEAは、GPSシステムによって使用される出力プロトコルの内の1つである。
【0095】
本発明のための衛星の数が従来の受信機のための衛星の数と同一である状況において、本開示において開示された受信機によって、従来の受信機より更に良い結果が獲得され得る。図6は、精度低下率(DOP)値が比較的大きい場合に、本発明に開示されたGPS受信機及び従来の受信機から獲得される測位誤差及び精度低下率(DOP)値の例を例証するいくらかのグラフを示す。図6(a)及び図6(b)において示されたように、DOP値は、本開示において開示されたGPS受信機によって減少し、従って測位誤差が減少する。図6(c)及び図6(d)において示されたように、従来の測位方法によって獲得された測位誤差のジッタは比較的大きく、測位誤差の最大偏差は600mを超えている。しかしながら、測位誤差の値は、ECA測位方法によって、100m未満になる。
【0096】
図7は、DOP値が比較的大きい場合に、本発明において開示されたGPS受信機及び従来の受信機から獲得された速度偏差の例を例証するグラフである。図7(a)及び図7(b)において示されたように、従来の受信機から獲得された速度偏差と比較すると、本発明において開示されたGPS受信機から獲得された速度偏差は減少する。従って、更に正確な計測速度が獲得される。
【0097】
図8は、DOP値が非常に大きい場合に、本発明において開示されたGPS受信機及び従来の受信機から獲得された測位誤差及びDOP値の例を例証するグラフである。図8において示されたように、図8(c)は空欄(blank)であり、従来の受信機において測位方法が集束(converge)し得ないことを例証する。図8(b)において示されたように、DOP値は、本開示において開示されたGPS受信機によって減少し、従って測位誤差が減少する。そして、(図8(a)において示されたように)測位が最終的に実行され得る。HDOPは、水平面の精度低下率を表す。
【0098】
図9は、DOP値が非常に大きい場合に、本発明において開示されたGPS受信機から獲得された速度偏差の例を例証するグラフである。DOP値が非常に大きい状況では、速度が従来の受信機によって測定されることはできない。
【0099】
本開示の一実施例による、移動情報を計算するための方法が、下記で提供される。その方法は、受信機の現在位置及び/または速度を計算するために使用される。図5は、本開示の一実施例による、測位方法の例を例証するフローチャートである。図5において示されるように、図5は図1Bと一緒に説明され、ブロックS510において、GPS受信機の位置における地球の半径が獲得される。例えば、移動情報判定装置100の初期位置が、初期位置確定及び管理モジュール130から獲得されると共に、対応する高度情報が、高度情報源150から獲得され、そして、GPS受信機の位置における地球の半径が、初期位置及び対応する高度情報に基づいて計算される。ブロックS520において、GPS受信機の現在位置及び/または速度が、地球の半径、及び複数の衛星が提供する信号に基づいて判定される。
【0100】
地球の半径は、地球の平均半径であり得るか、または初期位置及び高度情報に基づいて計算された地球の半径であり得る。初期位置は、初期位置確定及び管理モジュールによって決定されると共に、高度情報は、使用の優先順位を有する4種類の高度情報源の内の1つから獲得される。地球の半径を計算するための詳細が上記で説明される。従って、初期位置を計算するステップは、地球の半径を獲得する前に実行され得る。初期位置を獲得するための詳細は、図2において示された方法として類似しており、簡潔さ及び明瞭さの目的のために、ここでは繰り返して説明されないであろう。
【0101】
上記の方法は、更新するステップを含むことができる。更新するステップは、最近計算された位置によって前の位置を更新するために使用される。例えば、一番目の位置P0は、初期位置Pcoarseと置き換えられると共に、初期位置Pcoarseは、最終的に計算される更に正確な位置と置き換えられる。
【0102】
上記の方法は、更に選択するステップを含むことができる。選択するステップは、使用の優先順位を有する4種類の高度情報源の中から高度情報源を選択するために使用される。高度情報源を選択するための詳細は、上記で説明されたと共に、簡潔さ及び明瞭さの目的のために、ここでは繰り返して説明されないであろう。
【0103】
上記の方法は、GPSシステムにおいて利用され得ると共に、選択するステップを含む。DOPが不十分である状況では、衛星信号が弱いか、もしくは衛星の数が十分ではなく、測位のための上記の方法を選択するために、選択するステップが使用される。しかしながら、地球の半径が利用可能ではないならば、従来のGPS測位方法が、ベースバンド信号処理ユニットによって提供された各衛星が提供するGPS信号の測定された疑似距離及び/または周波数を使用することによって、GPS受信機の位置及び/または速度を計算するために選択され得る。
【0104】
一実施例において、上記の方法は、GPSシステムにおいて利用され得ると共に、検査するステップを含むことができる。検査するステップは、DOP値、衛星が提供する信号の強度、及びGPS受信機の速度が運動モジュール(motion module)に適合するかどうか、に基づいて、最終的に計算された位置の妥当性を判定するために使用される。
【0105】
従来の方法と比較すると、本開示において開示された方法は、衛星の数が十分ではない状況において、または衛星からの信号が強い干渉(interference:妨害)を有する状況において、測位を実行することができ、そして、更に測位の正確度を増加させることができる。更に、衛星の数が同一である状況において、更に良い結果が獲得され得る。
【0106】
図10は、本開示において開示されたGPS受信機及び従来の受信機で計算された測位結果を例証する写真である。図10において示された例では、4個の衛星が使用される。図10において示されたように、黒に着色された部分(section)1002は、従来の方法で計算された結果を表し、白で着色された部分1004は、本開示において開示された方法で計算された結果を表す。図10において示された測位結果によれば、本開示において開示された方法は、従来の方法に対して、位置の精度において利点を有する。
【0107】
前述の説明及び図面が本発明の実施例を表す一方、添付された請求項において定義されたように、様々な追加、修正、及び置換が、本発明の原理の精神及び範囲からはずれずに、実行され得るということが理解されることになる。当業者は、本発明が、形式、構造、装置、比率、材料、要素、及びコンポーネントの多くの変更によって使用され得ると共に、そうでなければ、本発明の原理からはずれずに特定の環境及び動作条件に特に適応する本発明の実践において使用され得るということを認識することになる。ここで開示された実施例は、従って、全ての点で実例となると共に、限定的でないと考えられることができ、本発明の範囲は、添付された請求項及びそれらの法律上の等価物によって示されると共に、前述の説明に限定されない。
【符号の説明】
【0108】
100 移動情報判定装置
110 地球中心補助物(ECA)情報獲得モジュール
111 高度情報及び位置情報保存モジュール
120 移動情報計算モジュール
130 初期位置確定及び管理モジュール
140 位置情報データベース
150 高度情報源
400 GPS受信機
401 アンテナ
411 RFユニット
412 ベースバンド信号処理ユニット
413 選択モジュール
420 クライアント端末
【特許請求の範囲】
【請求項1】
移動情報を判定するための移動情報判定装置であって、
前記移動情報判定装置の初期位置情報及び前記移動情報判定装置の高度情報を提供するための高度情報及び位置情報保存モジュールと、
前記高度情報及び位置情報保存モジュールが提供する前記初期位置情報及び前記高度情報に基づいて、前記移動情報判定装置の現在位置における地球の半径を獲得するための地球中心補助物(ECA)獲得モジュールと、
前記地球の前記半径及び複数の衛星が提供する複数の信号に基づいて、前記移動情報判定装置の前記現在位置及び速度の内の少なくとも1つを計算するための移動情報計算モジュールと
を備えることを特徴とする移動情報判定装置。
【請求項2】
前記高度情報及び位置情報保存モジュールが、
前記初期位置を獲得する初期位置確定及び管理モジュールを更に備え、
前記初期位置確定及び管理モジュールが、
前記地球の平均半径及び前記衛星が提供する前記信号に基づいて、1番目の位置を獲得し、
N番目の位置及び対応する特定の高度値に基づいて、前記地球の前記平均半径より正確である前記地球のN番目の半径を獲得し、
前記地球の前記N番目の半径及び前記衛星が提供する前記信号に基づいて、前記N番目の位置より正確である(N+1)番目の位置を獲得し、
所定の規則に基づいて、(N+1)個の位置から前記初期位置を判定し、
Nは1以上の整数である
ことを特徴とする請求項1に記載の移動情報判定装置。
【請求項3】
前記特定の高度値が、高度情報源から獲得されるか、もしくは実際の地形に照らしていずれかの値として設定される
ことを特徴とする請求項2に記載の移動情報判定装置。
【請求項4】
前記高度情報及び位置情報保存モジュールが、
前記移動情報判定装置の前記1番目の位置から前記N番目の位置までの内の少なくとも1つ及び前記現在位置を保存する位置情報データベースを更に備える
ことを特徴とする請求項2に記載の移動情報判定装置。
【請求項5】
前記移動情報判定装置が、
前記(N+1)番目の位置によって前記N番目の位置を更新すると共に、前記移動情報判定装置の前記現在位置によって前記(N+1)番目の位置を更新する位置情報更新モジュールを更に備える
ことを特徴とする請求項4に記載の移動情報判定装置。
【請求項6】
前記高度情報及び位置情報保存モジュールが、高度情報を保存するための高度情報源を更に備え、
前記高度情報源が、
GPS受信機によって計算される高度情報を保存するように動作可能な第1の高度情報源と、
前記GPS受信機に記録された以前の高度情報を保存するように動作可能な第2の高度情報源と、
外部の高度測定源から獲得された高度情報を保存するように動作可能な第3の高度情報源と、
地球規模の高度情報を保存するように動作可能な第4の高度情報源とを備える
ことを特徴とする請求項2に記載の移動情報判定装置。
【請求項7】
前記第1、前記第2、前記第3、及び前記第4の高度情報源から、前記地球の前記半径を計算するための基礎として、高度値を選択するように動作可能な高度情報源選択モジュールを更に備え、
前記高度情報源選択モジュールが、
(a)対応する高度情報源に保存された高度値を高度基準値と比較し、もし前記高度値と前記高度基準値との間の差異が第1しきい値より大きい場合に、前記対応する高度情報源に保存された前記高度値を廃棄する方法、
(b)対応する高度情報源に保存された高度値を、前記対応する高度情報源に保存された前記高度値に基づいて前記移動情報判定装置によって計算された第1の高度値と比較し、もし前記高度値と前記第1の高度値との間の差異が第2しきい値より大きい場合に、前記対応する高度情報源に保存された前記高度値を廃棄する方法、
(c)前記移動情報判定装置によって計算された前記現在位置を前記位置情報データベースに保存された予備の以前の位置と比較し、もし前記現在位置と前記予備の以前の位置との間の差異が第3しきい値より大きい場合に、前記対応する高度情報源に保存された前記高度値を廃棄する方法、
(d)前記初期位置を前記位置情報データベース内の予備の以前の位置と比較し、もし前記初期位置と前記予備の以前の位置との間の差異が第4しきい値より大きい場合に、前記対応する高度情報源に保存された前記高度値を廃棄する方法、の内の少なくとも1つに従って前記高度情報を選択すると共に、
前記高度情報源選択モジュールが、
前記GPS受信機によって計算されると共に前記第1の高度情報源に保存された前記高度情報、前記GPS受信機に記録されると共に前記第2の高度情報源に保存された前記以前の高度情報、外部の高度測定源から獲得されると共に前記第3の高度情報源に保存された前記高度情報、前記第4の高度情報源に保存された前記高度情報を選択する順番によって、前記第1、前記第2、前記第3、及び前記第4の高度情報源の内の1つを選択する
ことを特徴とする請求項6に記載の移動情報判定装置。
【請求項8】
前記移動情報判定装置が、全地球測位システムに統合され、
前記移動情報判定装置が、
精度低下率(DOP)値のパラメータ、前記衛星が提供する前記信号の強度、及びGPS受信機の速度が運動モジュールに適合するかどうか、の内の少なくとも1つに基づいて、最終的に計算された位置の妥当性を判定する検査モジュールを更に備える
ことを特徴とする請求項1に記載の移動情報判定装置。
【請求項9】
前記移動情報判定装置が、全地球測位システムに統合され、
前記移動情報判定装置が、
精度低下率(DOP)値のパラメータ、前記衛星が提供する前記信号の強度、前記地球の前記半径の有効性、及び前記衛星の数、の内の少なくとも1つに基づいて、前記移動情報判定装置を選択することを判定する選択モジュールを更に備える
ことを特徴とする請求項1に記載の移動情報判定装置。
【請求項10】
全地球測位システムにおけるGPS受信機であって、
前記移動情報判定装置の初期位置情報及び前記移動情報判定装置の高度情報を提供するための高度情報及び位置情報保存モジュールと、
前記高度情報及び位置情報保存モジュールが提供する前記初期位置情報及び前記高度情報に基づいて、前記移動情報判定装置の現在位置における地球の半径を獲得するための地球中心補助物(ECA)獲得モジュールと、
前記地球の前記半径及び複数の衛星が提供する複数の信号に基づいて、前記移動情報判定装置の前記現在位置及び速度を計算するための移動情報計算モジュールとを備える移動情報判定装置と、
前記移動情報判定装置に前記衛星からの前記信号を提供するためのベースバンド信号処理ユニットと
を具備することを特徴とするGPS受信機。
【請求項11】
GPS受信機を備えた対象物の移動情報を判定するための方法であって、
高度情報及び位置情報保存モジュールにおいて、前記GPS受信機の初期位置情報及び高度情報を獲得するステップと、
地球中心補助物(ECA)情報獲得モジュールにおいて、前記GPS受信機の前記初期位置情報及び前記高度情報に基づいて、前記GPS受信機の現在位置における地球の半径を獲得するステップと、
移動情報計算モジュールにおいて、前記地球の前記半径及び複数の衛星が提供する複数の信号に基づいて、前記移動情報を計算するステップとを含み、
前記移動情報が、前記受信機の前記現在位置及び速度の内の少なくとも1つを含む
ことを特徴とする方法。
【請求項12】
前記初期位置を獲得する前記ステップが、
前記地球の平均半径及び前記衛星が提供する前記信号に基づいて、前記GPS受信機の1番目の位置を計算するステップと、
N番目の位置及び対応する特定の高度値に基づいて、前記地球の前記平均半径より正確である前記地球のN番目の半径を獲得するステップと、
前記地球の前記N番目の半径及び前記衛星が提供する前記信号に基づいて、前記N番目の位置より正確である(N+1)番目の位置を獲得するステップと、
所定の規則に基づいて、前記1番目の位置から前記(N+1)番目の位置までに基づき前記初期位置を判定するステップとを含み、
Nは1以上の整数である
ことを特徴とする請求項11に記載の方法。
【請求項13】
前記特定の高度値が、高度情報源から獲得されるか、もしくは実際の地形に照らしていずれかの値として設定される
ことを特徴とする請求項12に記載の方法。
【請求項14】
前記(N+1)番目の位置によって前記N番目の位置を更新するステップと、
前記受信機の前記現在位置によって前記(N+1)番目の位置を更新するステップと
を更に含むことを特徴とする請求項12に記載の方法。
【請求項15】
前記地球の前記半径を獲得する前に、前記地球の前記半径を計算するための基礎として、高度情報源から高度値を選択するステップを更に含み、
前記高度情報源が、4種類の高度情報源を備え、
前記4種類の高度情報源が、
前記GPS受信機によって計算される高度情報を保存するように動作可能な第1の高度情報源と、
前記GPS受信機に記録された以前の高度情報を保存するように動作可能な第2の高度情報源と、
外部の高度測定源から獲得された高度情報を保存するように動作可能な第3の高度情報源と、
地球規模の高度情報を保存するように動作可能な第4の高度情報源とを備える
ことを特徴とする請求項11に記載の方法。
【請求項16】
前記高度値を選択する前記ステップが、
(a)対応する高度情報源に保存された高度値を高度基準値と比較し、もし前記高度値と前記高度基準値との間の差異が第1しきい値より大きい場合に、前記対応する高度情報源内の前記高度値を廃棄する方法、
(b)対応する高度情報源に保存された高度値を、前記対応する高度情報源に保存された前記高度値に基づいて前記移動情報判定装置によって計算された第1の高度値と比較し、もし前記高度値と前記第1の高度値との間の差異が第2しきい値より大きい場合に、前記対応する高度情報源に保存された前記高度値を廃棄する方法、
(c)前記移動情報判定装置によって計算された前記GPS受信機の前記現在位置を位置情報データベースに保存された予備の以前の位置と比較し、もし前記現在位置と前記予備の以前の位置との間の差異が第3しきい値より大きい場合に、前記対応する高度情報源内の前記高度値を廃棄する方法、
(d)前記初期位置を前記位置情報データベース内の予備の以前の位置と比較し、もし前記初期位置と前記予備の以前の位置との間の差異が第4しきい値より大きい場合に、前記対応する高度情報源内の前記高度値を廃棄する方法、の内の少なくとも1つに従って実行されると共に、
前記高度値が、前記GPS受信機によって計算されると共に前記第1の高度情報源に保存された前記高度情報、前記GPS受信機に記録されると共に前記第2の高度情報源に保存された前記以前の高度情報、外部の高度測定源から獲得されると共に前記第3の高度情報源に保存された前記高度情報、前記第4の高度情報源に保存された前記高度情報を選択する順番によって、選択される
ことを特徴とする請求項15に記載の方法。
【請求項17】
前記方法が、全地球測位システムにおいて使用され、
前記方法が、
精度低下率(DOP)値のパラメータ、前記衛星が提供する前記信号の強度、及び前記GPS受信機の速度が運動モジュールに適合するかどうか、の内の少なくとも1つに基づいて、最終的に計算された位置の妥当性を判定するステップを更に含む
ことを特徴とする請求項11に記載の方法。
【請求項18】
前記方法が、全地球測位システムにおいて使用され、
前記方法が、
精度低下率(DOP)値のパラメータ、前記衛星が提供する前記信号の強度、前記地球の前記半径の有効性、及び前記衛星の数、の内の少なくとも1つに基づいて、移動情報を判定するための前記方法を選択することを判定するステップを更に含む
ことを特徴とする請求項11に記載の方法。
【請求項1】
移動情報を判定するための移動情報判定装置であって、
前記移動情報判定装置の初期位置情報及び前記移動情報判定装置の高度情報を提供するための高度情報及び位置情報保存モジュールと、
前記高度情報及び位置情報保存モジュールが提供する前記初期位置情報及び前記高度情報に基づいて、前記移動情報判定装置の現在位置における地球の半径を獲得するための地球中心補助物(ECA)獲得モジュールと、
前記地球の前記半径及び複数の衛星が提供する複数の信号に基づいて、前記移動情報判定装置の前記現在位置及び速度の内の少なくとも1つを計算するための移動情報計算モジュールと
を備えることを特徴とする移動情報判定装置。
【請求項2】
前記高度情報及び位置情報保存モジュールが、
前記初期位置を獲得する初期位置確定及び管理モジュールを更に備え、
前記初期位置確定及び管理モジュールが、
前記地球の平均半径及び前記衛星が提供する前記信号に基づいて、1番目の位置を獲得し、
N番目の位置及び対応する特定の高度値に基づいて、前記地球の前記平均半径より正確である前記地球のN番目の半径を獲得し、
前記地球の前記N番目の半径及び前記衛星が提供する前記信号に基づいて、前記N番目の位置より正確である(N+1)番目の位置を獲得し、
所定の規則に基づいて、(N+1)個の位置から前記初期位置を判定し、
Nは1以上の整数である
ことを特徴とする請求項1に記載の移動情報判定装置。
【請求項3】
前記特定の高度値が、高度情報源から獲得されるか、もしくは実際の地形に照らしていずれかの値として設定される
ことを特徴とする請求項2に記載の移動情報判定装置。
【請求項4】
前記高度情報及び位置情報保存モジュールが、
前記移動情報判定装置の前記1番目の位置から前記N番目の位置までの内の少なくとも1つ及び前記現在位置を保存する位置情報データベースを更に備える
ことを特徴とする請求項2に記載の移動情報判定装置。
【請求項5】
前記移動情報判定装置が、
前記(N+1)番目の位置によって前記N番目の位置を更新すると共に、前記移動情報判定装置の前記現在位置によって前記(N+1)番目の位置を更新する位置情報更新モジュールを更に備える
ことを特徴とする請求項4に記載の移動情報判定装置。
【請求項6】
前記高度情報及び位置情報保存モジュールが、高度情報を保存するための高度情報源を更に備え、
前記高度情報源が、
GPS受信機によって計算される高度情報を保存するように動作可能な第1の高度情報源と、
前記GPS受信機に記録された以前の高度情報を保存するように動作可能な第2の高度情報源と、
外部の高度測定源から獲得された高度情報を保存するように動作可能な第3の高度情報源と、
地球規模の高度情報を保存するように動作可能な第4の高度情報源とを備える
ことを特徴とする請求項2に記載の移動情報判定装置。
【請求項7】
前記第1、前記第2、前記第3、及び前記第4の高度情報源から、前記地球の前記半径を計算するための基礎として、高度値を選択するように動作可能な高度情報源選択モジュールを更に備え、
前記高度情報源選択モジュールが、
(a)対応する高度情報源に保存された高度値を高度基準値と比較し、もし前記高度値と前記高度基準値との間の差異が第1しきい値より大きい場合に、前記対応する高度情報源に保存された前記高度値を廃棄する方法、
(b)対応する高度情報源に保存された高度値を、前記対応する高度情報源に保存された前記高度値に基づいて前記移動情報判定装置によって計算された第1の高度値と比較し、もし前記高度値と前記第1の高度値との間の差異が第2しきい値より大きい場合に、前記対応する高度情報源に保存された前記高度値を廃棄する方法、
(c)前記移動情報判定装置によって計算された前記現在位置を前記位置情報データベースに保存された予備の以前の位置と比較し、もし前記現在位置と前記予備の以前の位置との間の差異が第3しきい値より大きい場合に、前記対応する高度情報源に保存された前記高度値を廃棄する方法、
(d)前記初期位置を前記位置情報データベース内の予備の以前の位置と比較し、もし前記初期位置と前記予備の以前の位置との間の差異が第4しきい値より大きい場合に、前記対応する高度情報源に保存された前記高度値を廃棄する方法、の内の少なくとも1つに従って前記高度情報を選択すると共に、
前記高度情報源選択モジュールが、
前記GPS受信機によって計算されると共に前記第1の高度情報源に保存された前記高度情報、前記GPS受信機に記録されると共に前記第2の高度情報源に保存された前記以前の高度情報、外部の高度測定源から獲得されると共に前記第3の高度情報源に保存された前記高度情報、前記第4の高度情報源に保存された前記高度情報を選択する順番によって、前記第1、前記第2、前記第3、及び前記第4の高度情報源の内の1つを選択する
ことを特徴とする請求項6に記載の移動情報判定装置。
【請求項8】
前記移動情報判定装置が、全地球測位システムに統合され、
前記移動情報判定装置が、
精度低下率(DOP)値のパラメータ、前記衛星が提供する前記信号の強度、及びGPS受信機の速度が運動モジュールに適合するかどうか、の内の少なくとも1つに基づいて、最終的に計算された位置の妥当性を判定する検査モジュールを更に備える
ことを特徴とする請求項1に記載の移動情報判定装置。
【請求項9】
前記移動情報判定装置が、全地球測位システムに統合され、
前記移動情報判定装置が、
精度低下率(DOP)値のパラメータ、前記衛星が提供する前記信号の強度、前記地球の前記半径の有効性、及び前記衛星の数、の内の少なくとも1つに基づいて、前記移動情報判定装置を選択することを判定する選択モジュールを更に備える
ことを特徴とする請求項1に記載の移動情報判定装置。
【請求項10】
全地球測位システムにおけるGPS受信機であって、
前記移動情報判定装置の初期位置情報及び前記移動情報判定装置の高度情報を提供するための高度情報及び位置情報保存モジュールと、
前記高度情報及び位置情報保存モジュールが提供する前記初期位置情報及び前記高度情報に基づいて、前記移動情報判定装置の現在位置における地球の半径を獲得するための地球中心補助物(ECA)獲得モジュールと、
前記地球の前記半径及び複数の衛星が提供する複数の信号に基づいて、前記移動情報判定装置の前記現在位置及び速度を計算するための移動情報計算モジュールとを備える移動情報判定装置と、
前記移動情報判定装置に前記衛星からの前記信号を提供するためのベースバンド信号処理ユニットと
を具備することを特徴とするGPS受信機。
【請求項11】
GPS受信機を備えた対象物の移動情報を判定するための方法であって、
高度情報及び位置情報保存モジュールにおいて、前記GPS受信機の初期位置情報及び高度情報を獲得するステップと、
地球中心補助物(ECA)情報獲得モジュールにおいて、前記GPS受信機の前記初期位置情報及び前記高度情報に基づいて、前記GPS受信機の現在位置における地球の半径を獲得するステップと、
移動情報計算モジュールにおいて、前記地球の前記半径及び複数の衛星が提供する複数の信号に基づいて、前記移動情報を計算するステップとを含み、
前記移動情報が、前記受信機の前記現在位置及び速度の内の少なくとも1つを含む
ことを特徴とする方法。
【請求項12】
前記初期位置を獲得する前記ステップが、
前記地球の平均半径及び前記衛星が提供する前記信号に基づいて、前記GPS受信機の1番目の位置を計算するステップと、
N番目の位置及び対応する特定の高度値に基づいて、前記地球の前記平均半径より正確である前記地球のN番目の半径を獲得するステップと、
前記地球の前記N番目の半径及び前記衛星が提供する前記信号に基づいて、前記N番目の位置より正確である(N+1)番目の位置を獲得するステップと、
所定の規則に基づいて、前記1番目の位置から前記(N+1)番目の位置までに基づき前記初期位置を判定するステップとを含み、
Nは1以上の整数である
ことを特徴とする請求項11に記載の方法。
【請求項13】
前記特定の高度値が、高度情報源から獲得されるか、もしくは実際の地形に照らしていずれかの値として設定される
ことを特徴とする請求項12に記載の方法。
【請求項14】
前記(N+1)番目の位置によって前記N番目の位置を更新するステップと、
前記受信機の前記現在位置によって前記(N+1)番目の位置を更新するステップと
を更に含むことを特徴とする請求項12に記載の方法。
【請求項15】
前記地球の前記半径を獲得する前に、前記地球の前記半径を計算するための基礎として、高度情報源から高度値を選択するステップを更に含み、
前記高度情報源が、4種類の高度情報源を備え、
前記4種類の高度情報源が、
前記GPS受信機によって計算される高度情報を保存するように動作可能な第1の高度情報源と、
前記GPS受信機に記録された以前の高度情報を保存するように動作可能な第2の高度情報源と、
外部の高度測定源から獲得された高度情報を保存するように動作可能な第3の高度情報源と、
地球規模の高度情報を保存するように動作可能な第4の高度情報源とを備える
ことを特徴とする請求項11に記載の方法。
【請求項16】
前記高度値を選択する前記ステップが、
(a)対応する高度情報源に保存された高度値を高度基準値と比較し、もし前記高度値と前記高度基準値との間の差異が第1しきい値より大きい場合に、前記対応する高度情報源内の前記高度値を廃棄する方法、
(b)対応する高度情報源に保存された高度値を、前記対応する高度情報源に保存された前記高度値に基づいて前記移動情報判定装置によって計算された第1の高度値と比較し、もし前記高度値と前記第1の高度値との間の差異が第2しきい値より大きい場合に、前記対応する高度情報源に保存された前記高度値を廃棄する方法、
(c)前記移動情報判定装置によって計算された前記GPS受信機の前記現在位置を位置情報データベースに保存された予備の以前の位置と比較し、もし前記現在位置と前記予備の以前の位置との間の差異が第3しきい値より大きい場合に、前記対応する高度情報源内の前記高度値を廃棄する方法、
(d)前記初期位置を前記位置情報データベース内の予備の以前の位置と比較し、もし前記初期位置と前記予備の以前の位置との間の差異が第4しきい値より大きい場合に、前記対応する高度情報源内の前記高度値を廃棄する方法、の内の少なくとも1つに従って実行されると共に、
前記高度値が、前記GPS受信機によって計算されると共に前記第1の高度情報源に保存された前記高度情報、前記GPS受信機に記録されると共に前記第2の高度情報源に保存された前記以前の高度情報、外部の高度測定源から獲得されると共に前記第3の高度情報源に保存された前記高度情報、前記第4の高度情報源に保存された前記高度情報を選択する順番によって、選択される
ことを特徴とする請求項15に記載の方法。
【請求項17】
前記方法が、全地球測位システムにおいて使用され、
前記方法が、
精度低下率(DOP)値のパラメータ、前記衛星が提供する前記信号の強度、及び前記GPS受信機の速度が運動モジュールに適合するかどうか、の内の少なくとも1つに基づいて、最終的に計算された位置の妥当性を判定するステップを更に含む
ことを特徴とする請求項11に記載の方法。
【請求項18】
前記方法が、全地球測位システムにおいて使用され、
前記方法が、
精度低下率(DOP)値のパラメータ、前記衛星が提供する前記信号の強度、前記地球の前記半径の有効性、及び前記衛星の数、の内の少なくとも1つに基づいて、移動情報を判定するための前記方法を選択することを判定するステップを更に含む
ことを特徴とする請求項11に記載の方法。
【図1A】

【図1B】

【図2】
【図3A】

【図3B】
【図3C】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図1B】
【図2】
【図3A】
【図3B】
【図3C】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−79959(P2013−79959A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2012−219190(P2012−219190)
【出願日】平成24年10月1日(2012.10.1)
【出願人】(512318442)マイシ・エレクトロニック・(シャンハイ)・リミテッド (4)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成24年10月1日(2012.10.1)
【出願人】(512318442)マイシ・エレクトロニック・(シャンハイ)・リミテッド (4)
【Fターム(参考)】
[ Back to top ]