
移動方法特定装置、方法およびプログラム

【課題】地図情報を参照することなく移動方法を特定することが可能な技術を提供する。
【解決手段】移動方法特定装置であって、位置検出部の移動軌跡を取得する移動軌跡取得手段と、前記移動軌跡の形状を示す指標量を取得する指標量取得手段と、移動方法に対応付けられた前記指標量の範囲を取得する範囲取得手段と、少なくとも前記指標量が前記範囲に属することを、前記範囲に対応する前記移動方法によって移動が行われたと特定するための条件とする移動方法特定手段と、を備える。
【解決手段】移動方法特定装置であって、位置検出部の移動軌跡を取得する移動軌跡取得手段と、前記移動軌跡の形状を示す指標量を取得する指標量取得手段と、移動方法に対応付けられた前記指標量の範囲を取得する範囲取得手段と、少なくとも前記指標量が前記範囲に属することを、前記範囲に対応する前記移動方法によって移動が行われたと特定するための条件とする移動方法特定手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動方法を特定する技術に関する。
【背景技術】
【0002】
従来の技術として、携帯端末の移動軌跡が示す形状や位置がマッチングする移動路を、地図情報を参照することにより特定し、当該特定した移動路の種別(車道、歩行路、線路等)に基づいて移動方法を特定する技術が提案されている(特許文献1、2、参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−56002号公報
【特許文献2】特開平10−232992号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1,2において携帯端末の移動軌跡が示す形状や位置がマッチングする移動路を特定するためには、地図情報を参照しなければならないという問題があった。すなわち、携帯端末に地図情報が記憶可能な記憶媒体を備えさせるか、地図情報を記憶したサーバに移動方法を特定するたびにアクセスしなければならいないという問題があった。
本発明は、前記課題にかんがみてなされたもので、地図情報を参照することなく、移動方法によって移動が行われたことを特定することが可能な技術を提供すること目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明の移動方法特定装置は位置検出部を備えており、移動軌跡取得手段は位置検出部の移動軌跡を取得する。指標量取得手段は、移動軌跡の形状を示す指標量を取得する。範囲取得手段は、移動方法に対応付けられた指標量の範囲を取得する。そして、移動方法特定手段は、少なくとも指標量が移動方法に対応付けられた範囲に属することを、範囲に対応する移動方法によって移動が行われたと特定するための条件とする。
【0006】
かかる構成においては、移動軌跡の形状を示す指標量が移動方法に対応する範囲に属することが、当該移動方法によって移動が行われたと特定するための条件となるため、地図情報を参照することなく、当該移動方法によって移動が行われたことを特定することができる。従って、移動方法特定装置が地図情報を記憶したり、地図情報を記憶したサーバにアクセスしたりしなくて済む。また、例えばバスやタクシーのように同一の移動路を走行可能な2以上の移動方法であっても、移動方法に依存して移動軌跡の形状が異なれば、各移動方法について移動が行われたことを特定することができる。なお、移動方法に対応付けられた範囲とは、対応する移動方法において指標量が取り得る範囲を意味する。この範囲は、上限値と下限値によって画定されてもよいし、上限値と下限値のいずれか一方によって画定されてもよい。
【0007】
移動方法特定手段は、少なくとも移動軌跡の形状を示す指標量が移動方法に対応した範囲に属することを当該移動方法によって移動が行われたと特定するための条件とすればよく、当該移動方法によって移動が行われたと特定するための条件として他の条件を課すようにしてもよい。例えば、移動軌跡の形状を示す指標量が移動方法に対応した範囲に属し、かつ、移動軌跡の形状を示す指標量以外の他の指標が所定の条件を満足する場合に、当該移動方法によって移動が行われたと特定するようにしてもよい。例えば、移動方法特定手段は、移動軌跡の形状を示す指標量が移動方法に対応した範囲に属し、かつ、移動速度が所定の条件を満足する場合に、当該移動方法によって移動が行われたと特定するようにしてもよい。むろん、移動軌跡の形状を示す複数の種類の指標量を取得し、当該複数の種類の指標量のすべてが移動方法に対応した範囲に属することを当該移動方法によって移動が行われたと特定するための条件としてもよい。
【0008】
移動軌跡の形状を示す指標量は、その値が移動方法によって特徴付けられるものであればよい。例えば、水平方向のみに移動する移動方法によって移動が行われたことを特定するために好適な指標量は、移動軌跡の水平方向の形状を示すものとなる。これに対して、鉛直方向にも移動する移動方法によって移動が行われたことを特定するためには、移動軌跡の鉛直方向の形状を示す指標量も採用することができる。移動軌跡の形状を示す指標量として、移動軌跡の全部または一部の方向や角度や、これらの変化量やばらつき等を示すものを採用することができる。
【0009】
移動軌跡の形状を示す指標量の好適な例として、移動軌跡の曲率半径を示す指標量が挙げられる。この場合において移動方法に対応する範囲は、当該移動方法で移動した場合の旋回軌跡の曲率半径の最小値を下限値として有する。乗り物に乗車する移動方法の場合、乗り物の旋回性能に応じて旋回可能な最小旋回半径が異なることとなる。従って、最小旋回半径を下限値として有する範囲に曲率半径を示す指標量が属さない場合、すなわち最小旋回半径よりも小さい曲率半径で旋回が行われた場合には、当該範囲に対応する乗り物に乗車していないと特定することができる。
【0010】
また、移動方法特定手段は、複数の移動方法のそれぞれについて移動が行われたことを特定してもよい。複数の移動方法ごとに範囲が異なれば、移動軌跡の形状を示す指標量がある移動方法に対応する範囲に属するが、当該指標量が別の移動方法に対応する範囲には属さないという状況が生じる。さらに、単一の移動方法に対応する範囲にのみに指標量が属する場合には、移動が行われたと特定するための条件を当該単一の移動方法のみが満足し、当該単一の移動方法によって移動が行われたと特定することができる。なお、複数の移動方法ごとに異なる範囲は、互いに重複する領域を有していてもよい。この重複する領域に指標量が属する場合には、範囲に重複する領域を有する複数の移動方法のそれぞれが、移動が行われたと特定するための条件を満足することとなる。この場合、移動を行った移動方法を一意に特定することができない。このような状況にかんがみて、移動軌跡の形状とは別の観点に基づいて、移動を行った移動方法を一意に特定する構成を採用してもよい。
【0011】
移動軌跡の形状とは別の観点に基づいて、移動を行った移動方法を一意に特定する構成として以下の例が挙げられる。すなわち、移動方法が第1の乗り物と特定された状態から、指標量が前記第1の乗り物に対応する範囲に属さなくなり、第2の乗り物に対応する範囲と徒歩に対応する範囲の双方に属する状態になった場合には、移動方法が第1の乗り物から徒歩になったと特定する。第2の乗り物に対応する範囲と徒歩に対応する範囲の双方に属する状態になった場合には、第2の乗り物と徒歩との双方が移動を行った移動方法であると特定するための条件を満足することとなるが、この場合には別の観点に基づいて、移動を行った移動方法が徒歩であると特定する。この場合における別の観点とは、以下のとおりである。すなわち、乗り物を乗り換える場合、第1の乗り物を降りてから、必ず徒歩により、第2の乗り物に乗るものと考えられる。従って、第2の乗り物と徒歩との双方が移動を行った移動方法であると特定するための条件を満足する場合であっても、第1の乗り物を降りたと判断できる場合には、移動方法が第1の乗り物から徒歩になったと特定することができる。
【0012】
移動方法特定手段が移動方法を特定した場合には、当該特定した移動方法に対応した動作を動作手段が行うようにするのが望ましい。例えば、移動方法に対応した交通案内(経路案内、乗換案内、時刻表案内)を動作手段が行うようにしてもよい。また、移動方法が公共交通機関であるか否かによって、移動方法特定装置による音声出力の可否を切り替えてもよい。
【0013】
さらに、本発明のように移動方法を特定する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0014】
【図1】ナビゲーションシステムのブロック図である。
【図2】指標量を説明するグラフである。
【図3】移動方法に対応する指標量の範囲を説明する模式図である。
【図4】交通案内処理を示すフローチャートである。
【発明を実施するための形態】
【0015】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)ナビゲーションシステムの構成:
(2)交通案内処理:
(3)他の実施形態:
【0016】
(1)ナビゲーションシステムの構成:
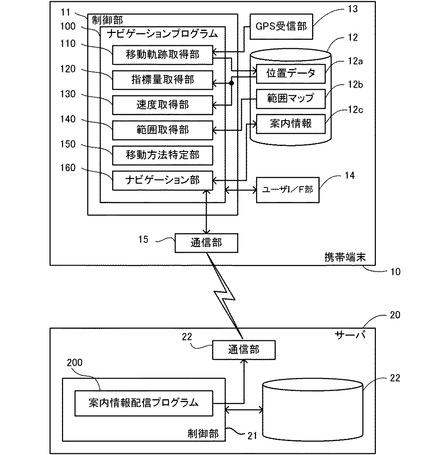
図1は、本発明の1実施形態にかかるナビゲーションシステム1の構成を示すブロック図である。ナビゲーションシステム1は、移動方法特定装置としての携帯端末10と、サーバ20とから構成される。
携帯端末10は、CPU、RAM、ROM等を備える制御部11と記録媒体12とを備えており、制御部11は、記録媒体12やROMに記憶されたプログラムを実行する。このプログラムの一つとしてナビゲーションプログラム100を実行する。ナビゲーションプログラム100は、移動方法に応じた交通案内を行う機能を制御部11に実現させるプログラムである。
【0017】
携帯端末10は、GPS受信部13とユーザI/F部14と通信部15とを備えている。位置検出部としてのGPS受信部13は、GPS衛星からの電波を受信し、図示しないインタフェースを介して携帯端末10の現在位置を算出するための信号を制御部11に出力する。制御部11は、GPS受信部13の出力信号に基づいて、携帯端末10の水平方向と鉛直方向の現在位置を特定する。制御部11は、水平方向における携帯端末10の現在位置を経度と緯度によって特定し、鉛直方向における携帯端末10の現在位置を海抜によって特定する。
【0018】
ユーザI/F部14は、利用者に各種の情報を提供し、または利用者の指示を入力するためのインタフェース部であり、図示しないディスプレイやスピーカーや入力ボタンなどを備えている。制御部11は、当該ユーザI/F部14に対して制御信号を出力して交通案内のための画像をディスプレイに表示させ、交通案内のための音声をスピーカーから出力させる。また、制御部11は、ユーザI/F部14の出力信号に基づいて利用者の指示を受け付ける。通信部15は携帯電話通信網に接続する回路を備えており、携帯電話通信網に接続されたサーバ20と制御部11とを通信可能とする。制御部11は、通信部15を介して案内情報12cを取得する。
【0019】
ナビゲーションプログラム100は、移動軌跡取得部110と指標量取得部120と速度取得部130と範囲取得部140と移動方法特定部150とナビゲーション部160とを備えている。移動軌跡取得部110は、携帯端末10の移動軌跡を取得する機能を制御部11に実行させるためのプログラムモジュールである。すなわち、制御部11は移動軌跡取得部110の機能により、GPS受信部13からの出力信号を時間周期的に取得し、当該出力信号に基づいて各時刻おける携帯端末10の位置を示す経度と緯度と海抜とを算出し、これらを格納した位置データ12aを記録媒体12に記憶する。本実施形態では、直近4秒間のサンプリング期間における2秒のサンプリング周期ごとに携帯端末10の位置を取得して、当該位置を当該位置データ12aとして記録媒体12に記憶する。位置データ12aによれば、サンプリング期間における携帯端末10の移動軌跡を特定することができる。
【0020】
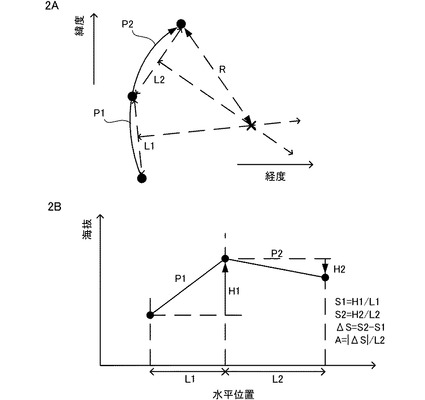
指標量取得部120は、移動軌跡の形状を示す指標量としての旋回半径Rと勾配絶対値Tと勾配変化率Aとを取得する機能を実行させるためのプログラムモジュールである。図2Aは旋回半径Rを説明するグラフであり、図2Bは勾配絶対値Tと勾配変化率Aとを説明するグラフである。図2Aに示すように、制御部11は指標量取得部120の機能により、サンプリング期間P1,P2の携帯端末10の位置を経度と緯度の座標平面にプロットした場合に、これらの位置を通過する円弧曲線を算出する。例えば、制御部11は、時刻が隣接する位置同士を連結した線分の垂直二等分線の交点を円弧曲線の中心として算出する。そして、制御部11は、当該中心と座標平面にプロットした携帯端末10の位置のいずれかとの距離を、移動軌跡の曲率半径を示す旋回半径Rとして取得する。
【0021】
制御部11は指標量取得部120の機能により、サンプリング期間P1,P2のうちの直近のサンプリング周期P2と、その一つ前のサンプリング周期P1における勾配S1,S2をそれぞれ算出する。勾配S1,S2は、各サンプリング周期P1,P2における最後の時刻の海抜から最初の時刻における海抜を引くことにより得られる鉛直変位H2,H2を、各サンプリング周期P1,P2における最後の時刻の位置と最初の時刻の位置との水平距離L1,L2でそれぞれ除算することにより得ることができる。水平距離L1,L2は、各サンプリング周期P1,P2における最後の時刻の位置と最初の時刻の位置とを結ぶ線分の長さ(直線距離)であってもよいし、前記円弧曲線に沿った距離であってもよい。制御部11は、直近のサンプリング周期P2について算出した勾配の絶対値を勾配絶対値Tとして取得する。勾配絶対値Tは携帯端末10の移動軌跡の鉛直方向の傾きを示す指標量に相当する。さらに、制御部11は、直近のサンプリング周期P2についての勾配S2から一つ前のサンプリング周期P1における勾配S1を引くことにより得られる勾配変化量ΔSの絶対値を、サンプリング周期P2における水平距離L2で除算することにより、勾配変化率Aを取得する。勾配絶対値Tは携帯端末10の移動軌跡の鉛直方向の傾きの変化度合いを示す指標量に相当する。
【0022】
速度取得部130は、携帯端末10が移動した速度Vを取得する機能を実行させるためのプログラムモジュールである。すなわち、制御部11は速度取得部130の機能により、記録媒体12に記憶された位置データ12aに基づいて、直近のサンプリング周期P2において水平方向に移動した水平距離L2を算出し、水平距離L2をサンプリング周期P2の長さ(2秒)で除算することにより、速度Vを取得する。
【0023】
範囲取得部140は、複数の移動方法のそれぞれに対応付けられた旋回半径範囲と勾配絶対値範囲と勾配変化率範囲と速度範囲とを取得する機能を実行させるためのプログラムモジュールである。すなわち、制御部11は速度取得部130の機能により、記録媒体12に記憶された範囲マップ12cを参照することにより、各移動方法によって実現可能な旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vの範囲としての旋回半径範囲と勾配絶対値範囲と勾配変化率範囲と速度範囲とを取得する。
【0024】
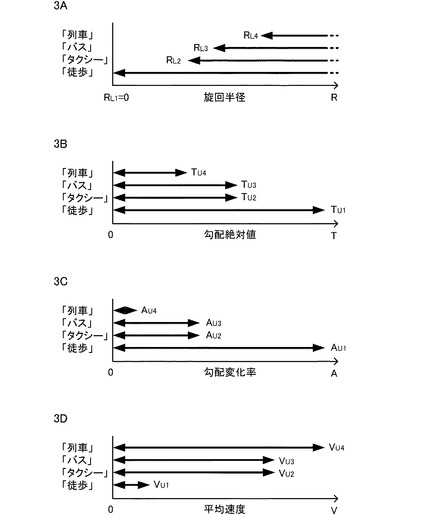
図3A〜3Dは、範囲マップ12cの内容を示す模式図である。本実施形態の範囲マップ12cには、移動方法として「徒歩」と「タクシー」と「バス」と「列車」とが定義されており、これらの移動方法のそれぞれについて旋回半径範囲と勾配絶対値範囲と勾配変化率範囲と速度範囲が対応付けられている。本実施形態では、旋回半径範囲と勾配絶対値範囲と勾配変化率範囲と速度範囲がそれぞれ上限値と下限値によって画定され、上限値と下限値が範囲マップ12cに規定されている。旋回半径範囲と勾配絶対値範囲と勾配変化率範囲と速度範囲は、それぞれ上限値と下限値によって画定されてもよいし、上限値と下限値のいずれか一方によって画定されてもよい。
【0025】
図3Aに示すように、「徒歩」と「タクシー」と「バス」と「列車」のいずれも旋回半径範囲の上限値が無限大となっている。いずれの移動方法であっても直進することは可能であり、無限大の旋回半径Rが実現できるからである。一方、旋回半径範囲の下限値は、「徒歩」(RL1)<「タクシー」(RL2)<「バス」(RL3)<「列車」(RL4)の関係となっている。なお、「徒歩」の場合、前進を伴うことなく方向転換が可能であるため、「徒歩」についての旋回半径範囲の下限値RL1は0となっている。また、「列車」の旋回半径範囲の下限値RL4よりも旋回半径Rの値が大きい領域については、「徒歩」と「タクシー」と「バス」と「列車」の旋回半径範囲が重複している。
【0026】
図3Bに示すように、「徒歩」と「タクシー」と「バス」と「列車」のいずれも勾配絶対値範囲の下限値が0となっている。いずれの移動方法であっても水平移動することは可能だからである。一方、勾配絶対値範囲の上限値は、「徒歩」(TU1)>「タクシー」(TU2)=「バス」(TU3)>「列車」(TU4)の関係となっている。図3Cに示すように、「徒歩」と「タクシー」と「バス」と「列車」のいずれも勾配変化率範囲の下限値が0となっている。いずれの移動方法であっても継続して水平移動することは可能だからである。一方、勾配変化率範囲の上限値は、「徒歩」(AU1)>「タクシー」(AU2)=「バス」(AU3)>「列車」(AU4)の関係となっている。「徒歩」によれば階段等も昇降できるため、「徒歩」についての勾配絶対値範囲と勾配変化率範囲の上限値TU1,AU1が最も大きい。一方、線路上のみ走行する「列車」についての勾配絶対値範囲と勾配変化率範囲の上限値TU4,AU4が最も小さい。また、「列車」の勾配絶対値範囲と勾配変化率範囲の下限値UU4,AU4よりも勾配絶対値Tと勾配変化率Aの値が小さい領域については、「徒歩」と「タクシー」と「バス」と「列車」の勾配絶対値範囲と勾配変化率範囲が重複している。
【0027】
図3Dに示すように、「徒歩」と「タクシー」と「バス」と「列車」のいずれも速度範囲の下限値が0となっている。いずれの移動方法であっても停止は可能であるからである。一方、速度範囲の上限値は「徒歩」(VU1)<「タクシー」(VU2)=「バス」(VU3)<「列車」(VU4)とされている。また、「徒歩」の速度範囲と下限値VU1よりも速度Vの値が小さい領域については、「徒歩」と「タクシー」と「バス」と「列車」の速度範囲が重複している。
【0028】
移動方法特定部150は、旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vがそれぞれ旋回半径範囲と勾配絶対値範囲と勾配変化率範囲と速度範囲に属する場合、対応する移動方法によって移動が行われたと特定する機能を実行させるためのプログラムモジュールである。本実施形態において、移動方法特定部150の機能により制御部11は、範囲マップ12cに定義された複数の移動方法のなかから、携帯端末10(携帯端末10を携行する利用者)が移動した移動方法を特定する。移動を行った移動方法として特定されるためには、旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vが、それぞれの移動方法に対応した旋回半径範囲と勾配絶対値範囲と勾配変化率範囲と速度範囲に属することが最低限必要とされる。以下、移動方法特定部150の具体的機能について説明する。
【0029】
制御部11は移動方法特定部150の機能により、旋回半径Rが旋回半径範囲に属さない移動方法については、当該移動方法によって移動が行われたと特定する候補から除外する。すなわち、制御部11は、旋回半径Rが旋回半径範囲に属さない移動方法については、当該移動方法によって移動が行われたと特定するための第1条件を満足しないとして、候補から除外する。同様に、制御部11は移動方法特定部150の機能により、勾配絶対値Tが勾配絶対値範囲に属さない移動方法については、当該移動方法によって移動が行われたと特定する候補から除外する。すなわち、制御部11は、勾配絶対値Tが勾配絶対値範囲に属さない移動方法については、当該移動方法によって移動が行われたと特定するための第2条件を満足しないとして、候補から除外する。また、制御部11は移動方法特定部150の機能により、勾配変化率Aが勾配変化率範囲に属さない移動方法については、当該移動方法によって移動が行われたと特定する候補から除外する。すなわち、制御部11は、勾配変化率Aが勾配変化率範囲に属さない移動方法については、当該移動方法によって移動が行われたと特定するための第3条件を満足しないとして、候補から除外する。さらに、制御部11は移動方法特定部150の機能により、速度Vが速度範囲に属さない移動方法については、当該移動方法によって移動が行われたと特定する候補から除外する。すなわち、制御部11は、速度Vが速度範囲に属さない移動方法についても、当該移動方法によって移動が行われたと特定するための第4条件を満足しないとして、候補から除外する。そして、制御部11は、旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vとに基づいて除外されなかった移動方法、すなわち移動が行われたと特定するための第1〜第4条件のすべてを満足する移動方法が単一である場合には、当該単一の移動方法によって、直近のサンプリング周期P2における移動が行われたと特定する。なお、複数の移動方法が除外されずに候補として残る場合には原則として移動方法を一意に特定することができない。
【0030】
例外として、制御部11は移動方法特定部150の機能により、最後に特定された移動方法が「列車」と「バス」と「タクシー」のいずれか(以下、「第1の乗り物」と表記する。)である場合であって、「第1の乗り物」が候補から除外され、「列車」と「バス」と「タクシー」のうち「第1の乗り物」と異なるもの(以下、「第2の乗り物」と表記する。)の少なくとも一つと「徒歩」とが移動方法の候補から除外されない状態となったときには、移動方法が「第1の乗り物」から「徒歩」になったと特定する。例えば、「列車」のみが候補から除外されたときには「タクシー」と「バス」と「徒歩」とが移動方法として特定される候補として残ることとなるが、最後に特定された移動方法が「列車」である場合には、直近のサンプリング周期P2における移動方法が「徒歩」であったと特定する。列車から直接タクシーやバスに乗り移ることは不可能であり、「列車」の直後の移動方法が「徒歩」となることなく「タクシー」または「バス」となることは考えられない。従って、制御部11は、「タクシー」と「バス」とが候補として残っているに場合でも、「徒歩」が除外されていない場合には移動方法が「列車」から「徒歩」になったと特定する。
【0031】
以上のように、本実施形態では、制御部11は移動軌跡の形状を示す指標量が移動方法に対応する範囲に属することを条件として、当該移動方法によって移動が行われたと特定するため、地図情報を参照する構成が必須とならない。従って、地図情報を記憶したり、地図情報を記憶したサーバにアクセスしたりしなくて済む。また、同一の移動路を走行可能な「バス」と「タクシー」であっても移動軌跡における旋回半径Rが異なるため、移動を行った移動方法が「バス」であるのか「タクシー」であるのかを特定することができる。「バス」と「タクシー」のように乗り物に乗車する移動方法の場合、乗り物の旋回性能に応じて旋回可能な最小旋回半径が異なるため、最小旋回半径を下限値として有する範囲に旋回半径Rが属さない場合、すなわち最小旋回半径よりも小さい旋回半径Rで旋回が行われた場合には、当該範囲に対応する乗り物に乗車していないと特定することができる。
【0032】
ナビゲーション部160は、特定した移動方法に応じた交通案内をユーザI/F部14を介して行う機能を実行させるためのプログラムモジュールである。すなわち、ナビゲーション部160の機能により制御部11は、特定した移動方法に変化があったか否かを判定し、変化があった場合には変化後の移動方法に対応する案内モードに切り替える動作を行う。例えば、移動方法が「列車」から「徒歩」に変化した場合には、案内モードを乗換案内モードから歩行ナビゲーションモードに切り替える。また、ナビゲーション部160の機能により制御部11は、移動方法に対応する案内情報12cをサーバ20に要求する。ナビゲーション部160の機能により制御部11は、サーバ20から取得した案内情報12cに基づく交通案内をユーザI/F部14を介して出力させる。例えば、乗換案内モードでは時刻表や乗換情報が案内情報12cとして取得され、歩行ナビゲーションモードでは現在位置の周辺の地図情報が案内情報12cとして取得される。
【0033】
サーバ20は、CPU、RAM、ROM等を備える制御部21と記録媒体22とを備えており、制御部21は、記録媒体22やROMに記憶されたプログラムを実行する。このプログラムの一つとして交通案内情報配信プログラム200を実行する。交通案内情報配信プログラム200は、携帯端末10において特定された移動方法に対応した案内情報12cを生成し、当該案内情報12cを携帯端末10に送信する機能を制御部11に実現させるプログラムである。
【0034】
(2)交通案内処理:
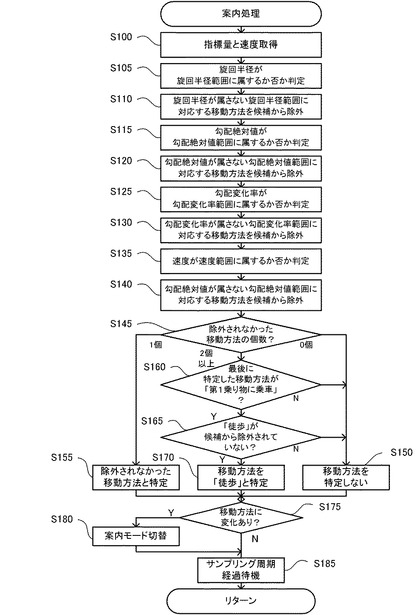
図4は、交通案内処理のフローチャートである。図4に示すように、交通案内処理は、サンプリング周期ごとに繰り返して実行されるループ処理である。ステップS100において、制御部11は移動軌跡取得部110と指標量取得部120と速度取得部130の機能により、旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vとを取得する。すなわち、制御部11は直近のサンプリング周期P2における携帯端末10の位置を考慮した移動軌跡に基づいて旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vとを取得する。
【0035】
ステップS105において、制御部11は、範囲取得部140の機能により旋回半径範囲を取得するとともに、移動方法特定部150の機能により旋回半径Rが各移動方法の旋回半径範囲に属するか否かを判定する。すなわち、移動方法特定部150の機能により制御部11は、旋回半径Rと各移動方法の旋回半径範囲の下限値RL1〜RL4とを比較し、下限値RL1〜RL4よりも旋回半径Rが小さいか否かを判定する。ステップS110において、移動方法特定部150の機能により制御部11は、下限値RL1〜RL4よりも旋回半径Rが小さい旋回半径範囲に対応する移動方法を候補から除外する。例えば、旋回半径RがR<RL4の場合には、制御部11は、「列車」を移動方法と特定する候補から除外する。一方、除外されなかった「徒歩」と「バス」と「タクシー」については、直近のサンプリング周期P2における移動を行った移動方法であると特定するための第1条件を満足する。
【0036】
ステップS115において、制御部11は範囲取得部140の機能により勾配絶対値範囲を取得するとともに、制御部11は移動方法特定部150の機能により勾配絶対値Tが各移動方法の勾配絶対値範囲に属するか否かを判定する。すなわち、移動方法特定部150の機能により制御部11は、勾配絶対値Tと各移動方法の勾配絶対値範囲の上限値TU1〜TU4とを比較し、上限値TU1〜TU4よりも勾配絶対値Tが大きいか否かを判定する。ステップS120において、移動方法特定部150の機能により制御部11は、上限値TU1〜TU4よりも勾配絶対値Tが大きい勾配絶対値範囲に対応する移動方法を候補から除外する。例えば、勾配絶対値TがTU4<T<TU2=TU3の場合には、制御部11は、「列車」を移動方法と特定する候補から除外する。一方、除外されなかった「徒歩」と「バス」と「タクシー」とについては、直近のサンプリング周期P2における移動を行った移動方法であると特定するための第2条件を満足する。
【0037】
ステップS125において、制御部11は範囲取得部140の機能により勾配変化率範囲を取得するとともに、制御部11は移動方法特定部150の機能により勾配変化率Aが各移動方法の勾配変化率範囲に属するか否かを判定する。すなわち、移動方法特定部150の機能により制御部11は、勾配変化率Aと各移動方法の勾配変化率範囲の上限値AU1〜AU4とを比較し、上限値AU1〜AU4よりも勾配変化率Aが大きいか否かを判定する。ステップS130において、移動方法特定部150の機能により制御部11は、上限値AU1〜AU4よりも勾配変化率Aが大きい勾配変化率範囲に対応する移動方法を候補から除外する。例えば、勾配変化率AがAU2=AU3<A<AU1の場合には、制御部11は、「列車」と「バス」と「タクシー」とを移動方法と特定する候補から除外する。一方、除外されなかった「徒歩」については、直近のサンプリング周期P2における移動を行った移動方法であると特定するための第3条件を満足する。
【0038】
ステップS135において、制御部11は範囲取得部140の機能により速度範囲を取得するとともに、制御部11は移動方法特定部150の機能により速度Vが各移動方法の速度範囲に属するか否かを判定する。すなわち、移動方法特定部150の機能により制御部11は、速度Vと各移動方法の速度範囲の上限値VU1〜VU4とを比較し、上限値VU1〜VU4よりも速度Vが大きいか否かを判定する。ステップS140において、移動方法特定部150の機能により制御部11は、上限値VU1〜VU4よりも速度Vが大きい速度範囲に対応する移動方法を候補から除外する。例えば、速度VがVU1<Vの場合には、制御部11は、「徒歩」を移動方法と特定する候補から除外する。一方、除外されなかった「バス」と「タクシー」と「列車」とについては、直近のサンプリング周期P2における移動を行った移動方法であると特定するための第4条件を満足する。
【0039】
ステップS145において、制御部11は移動方法特定部150の機能により、ステップS110,S120,S130,S140にて除外されなかった移動方法の個数がいくつであったかを判定する。除外されなかった移動方法の個数が0個であった場合には、ステップS150において、制御部11は移動方法特定部150の機能により、移動方法を特定しない。除外されなかった移動方法の個数が1個であった場合には、ステップS155において、制御部11は移動方法特定部150の機能により、除外されなかった移動方法によって直近のサンプリング周期P2における移動が行われたと特定する。すなわち、ステップS110,S120,S130,S140において順次特定した第1〜第4条件のすべてを満足する移動方法が単一である場合には、当該単一の移動方法によって移動が行われたと特定する。
【0040】
一方、除外されなかった移動方法の個数が2個以上であった場合には、制御部11は移動方法特定部150の機能により、ステップS160において、最後に特定された移動方法がいずれかの乗り物に乗車する移動方法、すなわち「第1の乗り物」であったか否かを判定する。本実施形態の交通案内処理は、サンプリング周期ごとに繰り返して実行されるループ処理であり、サンプリング周期ごとに移動方法を特定するための処理が繰り返される。従って、最後に特定された移動方法とは、過去に特定された移動方法のうち、最も現在に近いサンプリング周期にて特定された移動方法を意味する。なお、ステップS150において移動方法が特定されないサンプリング周期もあるため、必ずしも最後に特定された移動方法が直前のサンプリング周期に関するものであるとは限らない。
【0041】
ここで、最後に特定された移動方法が「第1の乗り物」でなかった場合には、制御部11は移動方法特定部150の機能により、ステップS150において、移動方法を特定しない。最後に特定された移動方法が「第1の乗り物」であった場合には、制御部11は移動方法特定部150の機能により、ステップS165において、除外されていない移動方法に「徒歩」が含まれるか否かを判定する。すなわち、除外されなかった2個以上の移動方法に、「徒歩」と、少なくとも1個の「第2の乗り物」とが含まれているか否かを判定する。「徒歩」が移動方法の候補から除外されていない場合には、ステップS170において、移動方法が「徒歩」であると特定する。本実施形態では、ステップS155,S170において移動方法が特定され、ステップS150では移動方法が特定されない、
【0042】
ステップS175において、ナビゲーション部160の機能により制御部11は、特定した移動方法に変化があったか否かを判定する。すなわち、制御部11は、最後に特定した移動方法と、直前に特定した移動方法とが異なるか否かを判定する。なお、直前に移動方法を特定しなかった場合には、移動方法に変化がなかったと特定する。特定した移動方法に変化があった場合には、ステップS180において、ナビゲーション部160の機能により制御部11は、案内モードを切り替える。案内モードを切り替えた場合、ナビゲーション部160の機能により制御部11は、ナビゲーション部160の機能により制御部11は、移動方法に対応する案内情報12cをサーバ20に要求し、サーバ20が返信した案内情報12cに基づく交通案内をユーザI/F部14を介して出力させる。
【0043】
ステップS185において、制御部11は移動軌跡取得部110と指標量取得部120と速度取得部130の機能により、ステップS100の実行から2秒のサンプリング周期が経過するまで待機し、サンプリング周期の経過後、ステップS100に戻る。すなわち、最新の携帯端末10の位置を考慮した移動軌跡に基づいて旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vとを取得し、旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vとに基づいて移動方法を特定する処理を繰り返す。
【0044】
(3)他の実施形態:
前記実施形態においては、移動方法が「徒歩」と「列車」と「バス」と「タクシー」のいずれであるかを特定する例を挙げたが、本発明では少なくとも単一の移動方法が行われたこととを特定することができればよい。また、前記実施形態に例示した移動方法以外の移動方法、例えば「自転車」や「飛行機」や「エレベータ」等について特定を行うようにしてもよい。
前記実施形態では、GPS受信部13からの出力信号に基づいて携帯端末10の位置を取得することとしたが、携帯端末10の位置を取得するために携帯端末10が速度センサや加速度センサや角加速度センを備えていてもよい。
【0045】
また、特定した移動方法に応じて携帯端末10が実行する機能は交通案内に限られず、例えば移動方法が公共交通機関であるか否かによって、携帯端末10による音声出力の可否の切替(マナーモードの切替)を行ってもよい。また、本発明によれば地図情報を参照する構成が必須とならないが、本発明の一態様として、地図情報を参照して特定した移動路に基づいて移動方法を特定する手法を併用してもよい。例えば、複数の移動方法が候補から除外されずに残った場合に、サーバ上の地図情報を参照して特定した移動路に基づいて移動方法を特定する構成とすれば、サーバにアクセスする頻度を低減することができる。
【符号の説明】
【0046】
1…ナビゲーションシステム、10…携帯端末、11…制御部、11a…交通案内情報、12…記録媒体、12c…範囲マップ、13…GPS受信部、14…ユーザI/F部、15…通信部、20…サーバ、21…制御部、22…記録媒体、100…ナビゲーションプログラム、110…移動軌跡取得部、120…指標量取得部、130…速度取得部、140…範囲取得部、150…移動方法特定部、160…ナビゲーション部、200…交通案内情報配信プログラム、R…旋回半径、T…勾配絶対値、A…勾配変化率、V…速度。
【技術分野】
【0001】
本発明は、移動方法を特定する技術に関する。
【背景技術】
【0002】
従来の技術として、携帯端末の移動軌跡が示す形状や位置がマッチングする移動路を、地図情報を参照することにより特定し、当該特定した移動路の種別(車道、歩行路、線路等)に基づいて移動方法を特定する技術が提案されている(特許文献1、2、参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−56002号公報
【特許文献2】特開平10−232992号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1,2において携帯端末の移動軌跡が示す形状や位置がマッチングする移動路を特定するためには、地図情報を参照しなければならないという問題があった。すなわち、携帯端末に地図情報が記憶可能な記憶媒体を備えさせるか、地図情報を記憶したサーバに移動方法を特定するたびにアクセスしなければならいないという問題があった。
本発明は、前記課題にかんがみてなされたもので、地図情報を参照することなく、移動方法によって移動が行われたことを特定することが可能な技術を提供すること目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明の移動方法特定装置は位置検出部を備えており、移動軌跡取得手段は位置検出部の移動軌跡を取得する。指標量取得手段は、移動軌跡の形状を示す指標量を取得する。範囲取得手段は、移動方法に対応付けられた指標量の範囲を取得する。そして、移動方法特定手段は、少なくとも指標量が移動方法に対応付けられた範囲に属することを、範囲に対応する移動方法によって移動が行われたと特定するための条件とする。
【0006】
かかる構成においては、移動軌跡の形状を示す指標量が移動方法に対応する範囲に属することが、当該移動方法によって移動が行われたと特定するための条件となるため、地図情報を参照することなく、当該移動方法によって移動が行われたことを特定することができる。従って、移動方法特定装置が地図情報を記憶したり、地図情報を記憶したサーバにアクセスしたりしなくて済む。また、例えばバスやタクシーのように同一の移動路を走行可能な2以上の移動方法であっても、移動方法に依存して移動軌跡の形状が異なれば、各移動方法について移動が行われたことを特定することができる。なお、移動方法に対応付けられた範囲とは、対応する移動方法において指標量が取り得る範囲を意味する。この範囲は、上限値と下限値によって画定されてもよいし、上限値と下限値のいずれか一方によって画定されてもよい。
【0007】
移動方法特定手段は、少なくとも移動軌跡の形状を示す指標量が移動方法に対応した範囲に属することを当該移動方法によって移動が行われたと特定するための条件とすればよく、当該移動方法によって移動が行われたと特定するための条件として他の条件を課すようにしてもよい。例えば、移動軌跡の形状を示す指標量が移動方法に対応した範囲に属し、かつ、移動軌跡の形状を示す指標量以外の他の指標が所定の条件を満足する場合に、当該移動方法によって移動が行われたと特定するようにしてもよい。例えば、移動方法特定手段は、移動軌跡の形状を示す指標量が移動方法に対応した範囲に属し、かつ、移動速度が所定の条件を満足する場合に、当該移動方法によって移動が行われたと特定するようにしてもよい。むろん、移動軌跡の形状を示す複数の種類の指標量を取得し、当該複数の種類の指標量のすべてが移動方法に対応した範囲に属することを当該移動方法によって移動が行われたと特定するための条件としてもよい。
【0008】
移動軌跡の形状を示す指標量は、その値が移動方法によって特徴付けられるものであればよい。例えば、水平方向のみに移動する移動方法によって移動が行われたことを特定するために好適な指標量は、移動軌跡の水平方向の形状を示すものとなる。これに対して、鉛直方向にも移動する移動方法によって移動が行われたことを特定するためには、移動軌跡の鉛直方向の形状を示す指標量も採用することができる。移動軌跡の形状を示す指標量として、移動軌跡の全部または一部の方向や角度や、これらの変化量やばらつき等を示すものを採用することができる。
【0009】
移動軌跡の形状を示す指標量の好適な例として、移動軌跡の曲率半径を示す指標量が挙げられる。この場合において移動方法に対応する範囲は、当該移動方法で移動した場合の旋回軌跡の曲率半径の最小値を下限値として有する。乗り物に乗車する移動方法の場合、乗り物の旋回性能に応じて旋回可能な最小旋回半径が異なることとなる。従って、最小旋回半径を下限値として有する範囲に曲率半径を示す指標量が属さない場合、すなわち最小旋回半径よりも小さい曲率半径で旋回が行われた場合には、当該範囲に対応する乗り物に乗車していないと特定することができる。
【0010】
また、移動方法特定手段は、複数の移動方法のそれぞれについて移動が行われたことを特定してもよい。複数の移動方法ごとに範囲が異なれば、移動軌跡の形状を示す指標量がある移動方法に対応する範囲に属するが、当該指標量が別の移動方法に対応する範囲には属さないという状況が生じる。さらに、単一の移動方法に対応する範囲にのみに指標量が属する場合には、移動が行われたと特定するための条件を当該単一の移動方法のみが満足し、当該単一の移動方法によって移動が行われたと特定することができる。なお、複数の移動方法ごとに異なる範囲は、互いに重複する領域を有していてもよい。この重複する領域に指標量が属する場合には、範囲に重複する領域を有する複数の移動方法のそれぞれが、移動が行われたと特定するための条件を満足することとなる。この場合、移動を行った移動方法を一意に特定することができない。このような状況にかんがみて、移動軌跡の形状とは別の観点に基づいて、移動を行った移動方法を一意に特定する構成を採用してもよい。
【0011】
移動軌跡の形状とは別の観点に基づいて、移動を行った移動方法を一意に特定する構成として以下の例が挙げられる。すなわち、移動方法が第1の乗り物と特定された状態から、指標量が前記第1の乗り物に対応する範囲に属さなくなり、第2の乗り物に対応する範囲と徒歩に対応する範囲の双方に属する状態になった場合には、移動方法が第1の乗り物から徒歩になったと特定する。第2の乗り物に対応する範囲と徒歩に対応する範囲の双方に属する状態になった場合には、第2の乗り物と徒歩との双方が移動を行った移動方法であると特定するための条件を満足することとなるが、この場合には別の観点に基づいて、移動を行った移動方法が徒歩であると特定する。この場合における別の観点とは、以下のとおりである。すなわち、乗り物を乗り換える場合、第1の乗り物を降りてから、必ず徒歩により、第2の乗り物に乗るものと考えられる。従って、第2の乗り物と徒歩との双方が移動を行った移動方法であると特定するための条件を満足する場合であっても、第1の乗り物を降りたと判断できる場合には、移動方法が第1の乗り物から徒歩になったと特定することができる。
【0012】
移動方法特定手段が移動方法を特定した場合には、当該特定した移動方法に対応した動作を動作手段が行うようにするのが望ましい。例えば、移動方法に対応した交通案内(経路案内、乗換案内、時刻表案内)を動作手段が行うようにしてもよい。また、移動方法が公共交通機関であるか否かによって、移動方法特定装置による音声出力の可否を切り替えてもよい。
【0013】
さらに、本発明のように移動方法を特定する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0014】
【図1】ナビゲーションシステムのブロック図である。
【図2】指標量を説明するグラフである。
【図3】移動方法に対応する指標量の範囲を説明する模式図である。
【図4】交通案内処理を示すフローチャートである。
【発明を実施するための形態】
【0015】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)ナビゲーションシステムの構成:
(2)交通案内処理:
(3)他の実施形態:
【0016】
(1)ナビゲーションシステムの構成:
図1は、本発明の1実施形態にかかるナビゲーションシステム1の構成を示すブロック図である。ナビゲーションシステム1は、移動方法特定装置としての携帯端末10と、サーバ20とから構成される。
携帯端末10は、CPU、RAM、ROM等を備える制御部11と記録媒体12とを備えており、制御部11は、記録媒体12やROMに記憶されたプログラムを実行する。このプログラムの一つとしてナビゲーションプログラム100を実行する。ナビゲーションプログラム100は、移動方法に応じた交通案内を行う機能を制御部11に実現させるプログラムである。
【0017】
携帯端末10は、GPS受信部13とユーザI/F部14と通信部15とを備えている。位置検出部としてのGPS受信部13は、GPS衛星からの電波を受信し、図示しないインタフェースを介して携帯端末10の現在位置を算出するための信号を制御部11に出力する。制御部11は、GPS受信部13の出力信号に基づいて、携帯端末10の水平方向と鉛直方向の現在位置を特定する。制御部11は、水平方向における携帯端末10の現在位置を経度と緯度によって特定し、鉛直方向における携帯端末10の現在位置を海抜によって特定する。
【0018】
ユーザI/F部14は、利用者に各種の情報を提供し、または利用者の指示を入力するためのインタフェース部であり、図示しないディスプレイやスピーカーや入力ボタンなどを備えている。制御部11は、当該ユーザI/F部14に対して制御信号を出力して交通案内のための画像をディスプレイに表示させ、交通案内のための音声をスピーカーから出力させる。また、制御部11は、ユーザI/F部14の出力信号に基づいて利用者の指示を受け付ける。通信部15は携帯電話通信網に接続する回路を備えており、携帯電話通信網に接続されたサーバ20と制御部11とを通信可能とする。制御部11は、通信部15を介して案内情報12cを取得する。
【0019】
ナビゲーションプログラム100は、移動軌跡取得部110と指標量取得部120と速度取得部130と範囲取得部140と移動方法特定部150とナビゲーション部160とを備えている。移動軌跡取得部110は、携帯端末10の移動軌跡を取得する機能を制御部11に実行させるためのプログラムモジュールである。すなわち、制御部11は移動軌跡取得部110の機能により、GPS受信部13からの出力信号を時間周期的に取得し、当該出力信号に基づいて各時刻おける携帯端末10の位置を示す経度と緯度と海抜とを算出し、これらを格納した位置データ12aを記録媒体12に記憶する。本実施形態では、直近4秒間のサンプリング期間における2秒のサンプリング周期ごとに携帯端末10の位置を取得して、当該位置を当該位置データ12aとして記録媒体12に記憶する。位置データ12aによれば、サンプリング期間における携帯端末10の移動軌跡を特定することができる。
【0020】
指標量取得部120は、移動軌跡の形状を示す指標量としての旋回半径Rと勾配絶対値Tと勾配変化率Aとを取得する機能を実行させるためのプログラムモジュールである。図2Aは旋回半径Rを説明するグラフであり、図2Bは勾配絶対値Tと勾配変化率Aとを説明するグラフである。図2Aに示すように、制御部11は指標量取得部120の機能により、サンプリング期間P1,P2の携帯端末10の位置を経度と緯度の座標平面にプロットした場合に、これらの位置を通過する円弧曲線を算出する。例えば、制御部11は、時刻が隣接する位置同士を連結した線分の垂直二等分線の交点を円弧曲線の中心として算出する。そして、制御部11は、当該中心と座標平面にプロットした携帯端末10の位置のいずれかとの距離を、移動軌跡の曲率半径を示す旋回半径Rとして取得する。
【0021】
制御部11は指標量取得部120の機能により、サンプリング期間P1,P2のうちの直近のサンプリング周期P2と、その一つ前のサンプリング周期P1における勾配S1,S2をそれぞれ算出する。勾配S1,S2は、各サンプリング周期P1,P2における最後の時刻の海抜から最初の時刻における海抜を引くことにより得られる鉛直変位H2,H2を、各サンプリング周期P1,P2における最後の時刻の位置と最初の時刻の位置との水平距離L1,L2でそれぞれ除算することにより得ることができる。水平距離L1,L2は、各サンプリング周期P1,P2における最後の時刻の位置と最初の時刻の位置とを結ぶ線分の長さ(直線距離)であってもよいし、前記円弧曲線に沿った距離であってもよい。制御部11は、直近のサンプリング周期P2について算出した勾配の絶対値を勾配絶対値Tとして取得する。勾配絶対値Tは携帯端末10の移動軌跡の鉛直方向の傾きを示す指標量に相当する。さらに、制御部11は、直近のサンプリング周期P2についての勾配S2から一つ前のサンプリング周期P1における勾配S1を引くことにより得られる勾配変化量ΔSの絶対値を、サンプリング周期P2における水平距離L2で除算することにより、勾配変化率Aを取得する。勾配絶対値Tは携帯端末10の移動軌跡の鉛直方向の傾きの変化度合いを示す指標量に相当する。
【0022】
速度取得部130は、携帯端末10が移動した速度Vを取得する機能を実行させるためのプログラムモジュールである。すなわち、制御部11は速度取得部130の機能により、記録媒体12に記憶された位置データ12aに基づいて、直近のサンプリング周期P2において水平方向に移動した水平距離L2を算出し、水平距離L2をサンプリング周期P2の長さ(2秒)で除算することにより、速度Vを取得する。
【0023】
範囲取得部140は、複数の移動方法のそれぞれに対応付けられた旋回半径範囲と勾配絶対値範囲と勾配変化率範囲と速度範囲とを取得する機能を実行させるためのプログラムモジュールである。すなわち、制御部11は速度取得部130の機能により、記録媒体12に記憶された範囲マップ12cを参照することにより、各移動方法によって実現可能な旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vの範囲としての旋回半径範囲と勾配絶対値範囲と勾配変化率範囲と速度範囲とを取得する。
【0024】
図3A〜3Dは、範囲マップ12cの内容を示す模式図である。本実施形態の範囲マップ12cには、移動方法として「徒歩」と「タクシー」と「バス」と「列車」とが定義されており、これらの移動方法のそれぞれについて旋回半径範囲と勾配絶対値範囲と勾配変化率範囲と速度範囲が対応付けられている。本実施形態では、旋回半径範囲と勾配絶対値範囲と勾配変化率範囲と速度範囲がそれぞれ上限値と下限値によって画定され、上限値と下限値が範囲マップ12cに規定されている。旋回半径範囲と勾配絶対値範囲と勾配変化率範囲と速度範囲は、それぞれ上限値と下限値によって画定されてもよいし、上限値と下限値のいずれか一方によって画定されてもよい。
【0025】
図3Aに示すように、「徒歩」と「タクシー」と「バス」と「列車」のいずれも旋回半径範囲の上限値が無限大となっている。いずれの移動方法であっても直進することは可能であり、無限大の旋回半径Rが実現できるからである。一方、旋回半径範囲の下限値は、「徒歩」(RL1)<「タクシー」(RL2)<「バス」(RL3)<「列車」(RL4)の関係となっている。なお、「徒歩」の場合、前進を伴うことなく方向転換が可能であるため、「徒歩」についての旋回半径範囲の下限値RL1は0となっている。また、「列車」の旋回半径範囲の下限値RL4よりも旋回半径Rの値が大きい領域については、「徒歩」と「タクシー」と「バス」と「列車」の旋回半径範囲が重複している。
【0026】
図3Bに示すように、「徒歩」と「タクシー」と「バス」と「列車」のいずれも勾配絶対値範囲の下限値が0となっている。いずれの移動方法であっても水平移動することは可能だからである。一方、勾配絶対値範囲の上限値は、「徒歩」(TU1)>「タクシー」(TU2)=「バス」(TU3)>「列車」(TU4)の関係となっている。図3Cに示すように、「徒歩」と「タクシー」と「バス」と「列車」のいずれも勾配変化率範囲の下限値が0となっている。いずれの移動方法であっても継続して水平移動することは可能だからである。一方、勾配変化率範囲の上限値は、「徒歩」(AU1)>「タクシー」(AU2)=「バス」(AU3)>「列車」(AU4)の関係となっている。「徒歩」によれば階段等も昇降できるため、「徒歩」についての勾配絶対値範囲と勾配変化率範囲の上限値TU1,AU1が最も大きい。一方、線路上のみ走行する「列車」についての勾配絶対値範囲と勾配変化率範囲の上限値TU4,AU4が最も小さい。また、「列車」の勾配絶対値範囲と勾配変化率範囲の下限値UU4,AU4よりも勾配絶対値Tと勾配変化率Aの値が小さい領域については、「徒歩」と「タクシー」と「バス」と「列車」の勾配絶対値範囲と勾配変化率範囲が重複している。
【0027】
図3Dに示すように、「徒歩」と「タクシー」と「バス」と「列車」のいずれも速度範囲の下限値が0となっている。いずれの移動方法であっても停止は可能であるからである。一方、速度範囲の上限値は「徒歩」(VU1)<「タクシー」(VU2)=「バス」(VU3)<「列車」(VU4)とされている。また、「徒歩」の速度範囲と下限値VU1よりも速度Vの値が小さい領域については、「徒歩」と「タクシー」と「バス」と「列車」の速度範囲が重複している。
【0028】
移動方法特定部150は、旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vがそれぞれ旋回半径範囲と勾配絶対値範囲と勾配変化率範囲と速度範囲に属する場合、対応する移動方法によって移動が行われたと特定する機能を実行させるためのプログラムモジュールである。本実施形態において、移動方法特定部150の機能により制御部11は、範囲マップ12cに定義された複数の移動方法のなかから、携帯端末10(携帯端末10を携行する利用者)が移動した移動方法を特定する。移動を行った移動方法として特定されるためには、旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vが、それぞれの移動方法に対応した旋回半径範囲と勾配絶対値範囲と勾配変化率範囲と速度範囲に属することが最低限必要とされる。以下、移動方法特定部150の具体的機能について説明する。
【0029】
制御部11は移動方法特定部150の機能により、旋回半径Rが旋回半径範囲に属さない移動方法については、当該移動方法によって移動が行われたと特定する候補から除外する。すなわち、制御部11は、旋回半径Rが旋回半径範囲に属さない移動方法については、当該移動方法によって移動が行われたと特定するための第1条件を満足しないとして、候補から除外する。同様に、制御部11は移動方法特定部150の機能により、勾配絶対値Tが勾配絶対値範囲に属さない移動方法については、当該移動方法によって移動が行われたと特定する候補から除外する。すなわち、制御部11は、勾配絶対値Tが勾配絶対値範囲に属さない移動方法については、当該移動方法によって移動が行われたと特定するための第2条件を満足しないとして、候補から除外する。また、制御部11は移動方法特定部150の機能により、勾配変化率Aが勾配変化率範囲に属さない移動方法については、当該移動方法によって移動が行われたと特定する候補から除外する。すなわち、制御部11は、勾配変化率Aが勾配変化率範囲に属さない移動方法については、当該移動方法によって移動が行われたと特定するための第3条件を満足しないとして、候補から除外する。さらに、制御部11は移動方法特定部150の機能により、速度Vが速度範囲に属さない移動方法については、当該移動方法によって移動が行われたと特定する候補から除外する。すなわち、制御部11は、速度Vが速度範囲に属さない移動方法についても、当該移動方法によって移動が行われたと特定するための第4条件を満足しないとして、候補から除外する。そして、制御部11は、旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vとに基づいて除外されなかった移動方法、すなわち移動が行われたと特定するための第1〜第4条件のすべてを満足する移動方法が単一である場合には、当該単一の移動方法によって、直近のサンプリング周期P2における移動が行われたと特定する。なお、複数の移動方法が除外されずに候補として残る場合には原則として移動方法を一意に特定することができない。
【0030】
例外として、制御部11は移動方法特定部150の機能により、最後に特定された移動方法が「列車」と「バス」と「タクシー」のいずれか(以下、「第1の乗り物」と表記する。)である場合であって、「第1の乗り物」が候補から除外され、「列車」と「バス」と「タクシー」のうち「第1の乗り物」と異なるもの(以下、「第2の乗り物」と表記する。)の少なくとも一つと「徒歩」とが移動方法の候補から除外されない状態となったときには、移動方法が「第1の乗り物」から「徒歩」になったと特定する。例えば、「列車」のみが候補から除外されたときには「タクシー」と「バス」と「徒歩」とが移動方法として特定される候補として残ることとなるが、最後に特定された移動方法が「列車」である場合には、直近のサンプリング周期P2における移動方法が「徒歩」であったと特定する。列車から直接タクシーやバスに乗り移ることは不可能であり、「列車」の直後の移動方法が「徒歩」となることなく「タクシー」または「バス」となることは考えられない。従って、制御部11は、「タクシー」と「バス」とが候補として残っているに場合でも、「徒歩」が除外されていない場合には移動方法が「列車」から「徒歩」になったと特定する。
【0031】
以上のように、本実施形態では、制御部11は移動軌跡の形状を示す指標量が移動方法に対応する範囲に属することを条件として、当該移動方法によって移動が行われたと特定するため、地図情報を参照する構成が必須とならない。従って、地図情報を記憶したり、地図情報を記憶したサーバにアクセスしたりしなくて済む。また、同一の移動路を走行可能な「バス」と「タクシー」であっても移動軌跡における旋回半径Rが異なるため、移動を行った移動方法が「バス」であるのか「タクシー」であるのかを特定することができる。「バス」と「タクシー」のように乗り物に乗車する移動方法の場合、乗り物の旋回性能に応じて旋回可能な最小旋回半径が異なるため、最小旋回半径を下限値として有する範囲に旋回半径Rが属さない場合、すなわち最小旋回半径よりも小さい旋回半径Rで旋回が行われた場合には、当該範囲に対応する乗り物に乗車していないと特定することができる。
【0032】
ナビゲーション部160は、特定した移動方法に応じた交通案内をユーザI/F部14を介して行う機能を実行させるためのプログラムモジュールである。すなわち、ナビゲーション部160の機能により制御部11は、特定した移動方法に変化があったか否かを判定し、変化があった場合には変化後の移動方法に対応する案内モードに切り替える動作を行う。例えば、移動方法が「列車」から「徒歩」に変化した場合には、案内モードを乗換案内モードから歩行ナビゲーションモードに切り替える。また、ナビゲーション部160の機能により制御部11は、移動方法に対応する案内情報12cをサーバ20に要求する。ナビゲーション部160の機能により制御部11は、サーバ20から取得した案内情報12cに基づく交通案内をユーザI/F部14を介して出力させる。例えば、乗換案内モードでは時刻表や乗換情報が案内情報12cとして取得され、歩行ナビゲーションモードでは現在位置の周辺の地図情報が案内情報12cとして取得される。
【0033】
サーバ20は、CPU、RAM、ROM等を備える制御部21と記録媒体22とを備えており、制御部21は、記録媒体22やROMに記憶されたプログラムを実行する。このプログラムの一つとして交通案内情報配信プログラム200を実行する。交通案内情報配信プログラム200は、携帯端末10において特定された移動方法に対応した案内情報12cを生成し、当該案内情報12cを携帯端末10に送信する機能を制御部11に実現させるプログラムである。
【0034】
(2)交通案内処理:
図4は、交通案内処理のフローチャートである。図4に示すように、交通案内処理は、サンプリング周期ごとに繰り返して実行されるループ処理である。ステップS100において、制御部11は移動軌跡取得部110と指標量取得部120と速度取得部130の機能により、旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vとを取得する。すなわち、制御部11は直近のサンプリング周期P2における携帯端末10の位置を考慮した移動軌跡に基づいて旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vとを取得する。
【0035】
ステップS105において、制御部11は、範囲取得部140の機能により旋回半径範囲を取得するとともに、移動方法特定部150の機能により旋回半径Rが各移動方法の旋回半径範囲に属するか否かを判定する。すなわち、移動方法特定部150の機能により制御部11は、旋回半径Rと各移動方法の旋回半径範囲の下限値RL1〜RL4とを比較し、下限値RL1〜RL4よりも旋回半径Rが小さいか否かを判定する。ステップS110において、移動方法特定部150の機能により制御部11は、下限値RL1〜RL4よりも旋回半径Rが小さい旋回半径範囲に対応する移動方法を候補から除外する。例えば、旋回半径RがR<RL4の場合には、制御部11は、「列車」を移動方法と特定する候補から除外する。一方、除外されなかった「徒歩」と「バス」と「タクシー」については、直近のサンプリング周期P2における移動を行った移動方法であると特定するための第1条件を満足する。
【0036】
ステップS115において、制御部11は範囲取得部140の機能により勾配絶対値範囲を取得するとともに、制御部11は移動方法特定部150の機能により勾配絶対値Tが各移動方法の勾配絶対値範囲に属するか否かを判定する。すなわち、移動方法特定部150の機能により制御部11は、勾配絶対値Tと各移動方法の勾配絶対値範囲の上限値TU1〜TU4とを比較し、上限値TU1〜TU4よりも勾配絶対値Tが大きいか否かを判定する。ステップS120において、移動方法特定部150の機能により制御部11は、上限値TU1〜TU4よりも勾配絶対値Tが大きい勾配絶対値範囲に対応する移動方法を候補から除外する。例えば、勾配絶対値TがTU4<T<TU2=TU3の場合には、制御部11は、「列車」を移動方法と特定する候補から除外する。一方、除外されなかった「徒歩」と「バス」と「タクシー」とについては、直近のサンプリング周期P2における移動を行った移動方法であると特定するための第2条件を満足する。
【0037】
ステップS125において、制御部11は範囲取得部140の機能により勾配変化率範囲を取得するとともに、制御部11は移動方法特定部150の機能により勾配変化率Aが各移動方法の勾配変化率範囲に属するか否かを判定する。すなわち、移動方法特定部150の機能により制御部11は、勾配変化率Aと各移動方法の勾配変化率範囲の上限値AU1〜AU4とを比較し、上限値AU1〜AU4よりも勾配変化率Aが大きいか否かを判定する。ステップS130において、移動方法特定部150の機能により制御部11は、上限値AU1〜AU4よりも勾配変化率Aが大きい勾配変化率範囲に対応する移動方法を候補から除外する。例えば、勾配変化率AがAU2=AU3<A<AU1の場合には、制御部11は、「列車」と「バス」と「タクシー」とを移動方法と特定する候補から除外する。一方、除外されなかった「徒歩」については、直近のサンプリング周期P2における移動を行った移動方法であると特定するための第3条件を満足する。
【0038】
ステップS135において、制御部11は範囲取得部140の機能により速度範囲を取得するとともに、制御部11は移動方法特定部150の機能により速度Vが各移動方法の速度範囲に属するか否かを判定する。すなわち、移動方法特定部150の機能により制御部11は、速度Vと各移動方法の速度範囲の上限値VU1〜VU4とを比較し、上限値VU1〜VU4よりも速度Vが大きいか否かを判定する。ステップS140において、移動方法特定部150の機能により制御部11は、上限値VU1〜VU4よりも速度Vが大きい速度範囲に対応する移動方法を候補から除外する。例えば、速度VがVU1<Vの場合には、制御部11は、「徒歩」を移動方法と特定する候補から除外する。一方、除外されなかった「バス」と「タクシー」と「列車」とについては、直近のサンプリング周期P2における移動を行った移動方法であると特定するための第4条件を満足する。
【0039】
ステップS145において、制御部11は移動方法特定部150の機能により、ステップS110,S120,S130,S140にて除外されなかった移動方法の個数がいくつであったかを判定する。除外されなかった移動方法の個数が0個であった場合には、ステップS150において、制御部11は移動方法特定部150の機能により、移動方法を特定しない。除外されなかった移動方法の個数が1個であった場合には、ステップS155において、制御部11は移動方法特定部150の機能により、除外されなかった移動方法によって直近のサンプリング周期P2における移動が行われたと特定する。すなわち、ステップS110,S120,S130,S140において順次特定した第1〜第4条件のすべてを満足する移動方法が単一である場合には、当該単一の移動方法によって移動が行われたと特定する。
【0040】
一方、除外されなかった移動方法の個数が2個以上であった場合には、制御部11は移動方法特定部150の機能により、ステップS160において、最後に特定された移動方法がいずれかの乗り物に乗車する移動方法、すなわち「第1の乗り物」であったか否かを判定する。本実施形態の交通案内処理は、サンプリング周期ごとに繰り返して実行されるループ処理であり、サンプリング周期ごとに移動方法を特定するための処理が繰り返される。従って、最後に特定された移動方法とは、過去に特定された移動方法のうち、最も現在に近いサンプリング周期にて特定された移動方法を意味する。なお、ステップS150において移動方法が特定されないサンプリング周期もあるため、必ずしも最後に特定された移動方法が直前のサンプリング周期に関するものであるとは限らない。
【0041】
ここで、最後に特定された移動方法が「第1の乗り物」でなかった場合には、制御部11は移動方法特定部150の機能により、ステップS150において、移動方法を特定しない。最後に特定された移動方法が「第1の乗り物」であった場合には、制御部11は移動方法特定部150の機能により、ステップS165において、除外されていない移動方法に「徒歩」が含まれるか否かを判定する。すなわち、除外されなかった2個以上の移動方法に、「徒歩」と、少なくとも1個の「第2の乗り物」とが含まれているか否かを判定する。「徒歩」が移動方法の候補から除外されていない場合には、ステップS170において、移動方法が「徒歩」であると特定する。本実施形態では、ステップS155,S170において移動方法が特定され、ステップS150では移動方法が特定されない、
【0042】
ステップS175において、ナビゲーション部160の機能により制御部11は、特定した移動方法に変化があったか否かを判定する。すなわち、制御部11は、最後に特定した移動方法と、直前に特定した移動方法とが異なるか否かを判定する。なお、直前に移動方法を特定しなかった場合には、移動方法に変化がなかったと特定する。特定した移動方法に変化があった場合には、ステップS180において、ナビゲーション部160の機能により制御部11は、案内モードを切り替える。案内モードを切り替えた場合、ナビゲーション部160の機能により制御部11は、ナビゲーション部160の機能により制御部11は、移動方法に対応する案内情報12cをサーバ20に要求し、サーバ20が返信した案内情報12cに基づく交通案内をユーザI/F部14を介して出力させる。
【0043】
ステップS185において、制御部11は移動軌跡取得部110と指標量取得部120と速度取得部130の機能により、ステップS100の実行から2秒のサンプリング周期が経過するまで待機し、サンプリング周期の経過後、ステップS100に戻る。すなわち、最新の携帯端末10の位置を考慮した移動軌跡に基づいて旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vとを取得し、旋回半径Rと勾配絶対値Tと勾配変化率Aと速度Vとに基づいて移動方法を特定する処理を繰り返す。
【0044】
(3)他の実施形態:
前記実施形態においては、移動方法が「徒歩」と「列車」と「バス」と「タクシー」のいずれであるかを特定する例を挙げたが、本発明では少なくとも単一の移動方法が行われたこととを特定することができればよい。また、前記実施形態に例示した移動方法以外の移動方法、例えば「自転車」や「飛行機」や「エレベータ」等について特定を行うようにしてもよい。
前記実施形態では、GPS受信部13からの出力信号に基づいて携帯端末10の位置を取得することとしたが、携帯端末10の位置を取得するために携帯端末10が速度センサや加速度センサや角加速度センを備えていてもよい。
【0045】
また、特定した移動方法に応じて携帯端末10が実行する機能は交通案内に限られず、例えば移動方法が公共交通機関であるか否かによって、携帯端末10による音声出力の可否の切替(マナーモードの切替)を行ってもよい。また、本発明によれば地図情報を参照する構成が必須とならないが、本発明の一態様として、地図情報を参照して特定した移動路に基づいて移動方法を特定する手法を併用してもよい。例えば、複数の移動方法が候補から除外されずに残った場合に、サーバ上の地図情報を参照して特定した移動路に基づいて移動方法を特定する構成とすれば、サーバにアクセスする頻度を低減することができる。
【符号の説明】
【0046】
1…ナビゲーションシステム、10…携帯端末、11…制御部、11a…交通案内情報、12…記録媒体、12c…範囲マップ、13…GPS受信部、14…ユーザI/F部、15…通信部、20…サーバ、21…制御部、22…記録媒体、100…ナビゲーションプログラム、110…移動軌跡取得部、120…指標量取得部、130…速度取得部、140…範囲取得部、150…移動方法特定部、160…ナビゲーション部、200…交通案内情報配信プログラム、R…旋回半径、T…勾配絶対値、A…勾配変化率、V…速度。
【特許請求の範囲】
【請求項1】
位置検出部の移動軌跡を取得する移動軌跡取得手段と、
前記移動軌跡の形状を示す指標量を取得する指標量取得手段と、
移動方法に対応付けられた前記指標量の範囲を取得する範囲取得手段と、
少なくとも前記指標量が前記範囲に属することを、前記範囲に対応する前記移動方法によって移動が行われたと特定するための条件とする移動方法特定手段と、
を備える移動方法特定装置。
【請求項2】
前記指標量は、前記移動軌跡の曲率半径を示し、
前記範囲は、前記移動方法による旋回軌跡の曲率半径の最小値を下限値として有する、
請求項1に記載の移動方法特定装置。
【請求項3】
前記範囲取得手段は、複数の前記移動方法ごとに異なる前記範囲を取得し、
前記移動方法特定手段は、複数の前記移動方法のなかから前記指標量が属する前記範囲に対応する前記移動方法を特定する、
請求項1または請求項2のいずれかに記載の移動方法特定装置。
【請求項4】
前記範囲取得手段は、前記移動方法としての第1の乗り物と第2の乗り物と徒歩についての前記範囲を取得し、
前記移動方法特定手段は、前記移動方法が前記第1の乗り物と特定された状態から、前記指標量が前記第1の乗り物に対応する前記範囲に属さなくなり、前記第2の乗り物に対応する前記範囲と前記徒歩に対応する前記範囲の双方に属する状態になった場合、前記移動方法が前記第1の乗り物から前記徒歩になったと特定する、
請求項3に記載の移動方法特定装置。
【請求項5】
前記移動方法特定手段が特定した前記移動方法に対応した動作を行う動作手段を備える、
請求項1から請求項4のいずれか一項に記載の移動方法特定装置。
【請求項6】
位置検出部の移動軌跡を取得する移動軌跡取得工程と、
前記移動軌跡の形状を示す指標量を取得する指標量取得工程と、
移動方法に対応付けられた前記指標量の範囲を取得する範囲取得工程と、
少なくとも前記指標量が前記範囲に属することを、前記範囲に対応する前記移動方法によって移動が行われたと特定する条件とする移動方法特定工程と、
を含む移動方法特定方法。
【請求項7】
位置検出部の移動軌跡を取得する移動軌跡取得機能と、
前記移動軌跡の形状を示す指標量を取得する指標量取得機能と、
移動方法に対応付けられた前記指標量の範囲を取得する範囲取得機能と、
少なくとも前記指標量が前記範囲に属することを、前記範囲に対応する前記移動方法によって移動が行われたと特定する条件とする移動方法特定機能と、
をコンピューターに実行させる移動方法特定プログラム。
【請求項1】
位置検出部の移動軌跡を取得する移動軌跡取得手段と、
前記移動軌跡の形状を示す指標量を取得する指標量取得手段と、
移動方法に対応付けられた前記指標量の範囲を取得する範囲取得手段と、
少なくとも前記指標量が前記範囲に属することを、前記範囲に対応する前記移動方法によって移動が行われたと特定するための条件とする移動方法特定手段と、
を備える移動方法特定装置。
【請求項2】
前記指標量は、前記移動軌跡の曲率半径を示し、
前記範囲は、前記移動方法による旋回軌跡の曲率半径の最小値を下限値として有する、
請求項1に記載の移動方法特定装置。
【請求項3】
前記範囲取得手段は、複数の前記移動方法ごとに異なる前記範囲を取得し、
前記移動方法特定手段は、複数の前記移動方法のなかから前記指標量が属する前記範囲に対応する前記移動方法を特定する、
請求項1または請求項2のいずれかに記載の移動方法特定装置。
【請求項4】
前記範囲取得手段は、前記移動方法としての第1の乗り物と第2の乗り物と徒歩についての前記範囲を取得し、
前記移動方法特定手段は、前記移動方法が前記第1の乗り物と特定された状態から、前記指標量が前記第1の乗り物に対応する前記範囲に属さなくなり、前記第2の乗り物に対応する前記範囲と前記徒歩に対応する前記範囲の双方に属する状態になった場合、前記移動方法が前記第1の乗り物から前記徒歩になったと特定する、
請求項3に記載の移動方法特定装置。
【請求項5】
前記移動方法特定手段が特定した前記移動方法に対応した動作を行う動作手段を備える、
請求項1から請求項4のいずれか一項に記載の移動方法特定装置。
【請求項6】
位置検出部の移動軌跡を取得する移動軌跡取得工程と、
前記移動軌跡の形状を示す指標量を取得する指標量取得工程と、
移動方法に対応付けられた前記指標量の範囲を取得する範囲取得工程と、
少なくとも前記指標量が前記範囲に属することを、前記範囲に対応する前記移動方法によって移動が行われたと特定する条件とする移動方法特定工程と、
を含む移動方法特定方法。
【請求項7】
位置検出部の移動軌跡を取得する移動軌跡取得機能と、
前記移動軌跡の形状を示す指標量を取得する指標量取得機能と、
移動方法に対応付けられた前記指標量の範囲を取得する範囲取得機能と、
少なくとも前記指標量が前記範囲に属することを、前記範囲に対応する前記移動方法によって移動が行われたと特定する条件とする移動方法特定機能と、
をコンピューターに実行させる移動方法特定プログラム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−180936(P2011−180936A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−46114(P2010−46114)
【出願日】平成22年3月3日(2010.3.3)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年3月3日(2010.3.3)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]