
移動栽培装置
【課題】搬送経路に沿って搬送される各プランターにより栽培される植物に係る情報の管理が容易となり、トレーサビリティーが向上する移動栽培装置を提供すること。
【解決手段】移動栽培装置1に、横方向に長い形状のプランター2・2・・・、プランター2・2・・・をそれぞれ支持し、対応するプランター2において栽培される植物に係る情報を記憶するためのICタグが設けられた栽培ベンチ10・10・・・、栽培ベンチ10・10・・・を搬送する搬送装置20A・20B・40A・40B、搬送経路の中途部に設定された読み取り・書き込み位置に配置され、ICタグから植物に係る情報を読み取り、ICタグに前記植物に係る情報を書き込む読み取り・書き込み装置51、搬送装置および読み取り・書き込み装置51の動作を制御する制御部61、を具備した。
【解決手段】移動栽培装置1に、横方向に長い形状のプランター2・2・・・、プランター2・2・・・をそれぞれ支持し、対応するプランター2において栽培される植物に係る情報を記憶するためのICタグが設けられた栽培ベンチ10・10・・・、栽培ベンチ10・10・・・を搬送する搬送装置20A・20B・40A・40B、搬送経路の中途部に設定された読み取り・書き込み位置に配置され、ICタグから植物に係る情報を読み取り、ICタグに前記植物に係る情報を書き込む読み取り・書き込み装置51、搬送装置および読み取り・書き込み装置51の動作を制御する制御部61、を具備した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、横方向に長い形状の複数のプランターを用いて植物を高密度で栽培する技術に関する。
【背景技術】
【0002】
従来、横方向に長い形状の複数のプランターを用いて植物を栽培する技術は公知となっている。例えば、特許文献1および特許文献2に記載の如くである。
また、近年は食物の安全性に対する消費者の意識が高まり、収穫物のトレーサビリティー(収穫物の栽培履歴を正確に記憶し、消費者の求めに応じて当該履歴を提供すること)が求められている。
しかし、特許文献1および特許文献2に記載の技術では、作業者が各プランターにより栽培される植物の栽培履歴を別途記憶する(例えば、用紙に記入する、パソコンのデータベースに手入力する等)必要があり、作業が煩雑である。また、作業者が栽培履歴を別途記憶する際に記入漏れおよび誤記入は許されないため、作業者の負担が大きい。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−78577号公報
【特許文献2】特開平9−56259号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は以上の如き状況に鑑みてなされたものである。
すなわち、本発明が解決しようとする課題は、搬送経路に沿って搬送される各プランターにより栽培される植物に係る情報の管理が容易となり、トレーサビリティーが向上する移動栽培装置を提供すること、である。
【課題を解決するための手段】
【0005】
以下では、上記課題を解決するための手段を説明する。
【0006】
即ち、請求項1においては、縦方向に短く、前記縦方向に垂直な横方向に長い形状を有し、植物を栽培する複数のプランターと、前記複数のプランターをそれぞれ支持し、対応するプランターにおいて栽培される植物に係る情報を記憶するためのICタグが設けられた複数の栽培ベンチと、前記複数のプランターをそれぞれ支持した栽培ベンチを搬送経路に沿って搬送する搬送装置と、前記搬送経路の中途部に設定された読み取り・書き込み位置に配置され、前記読み取り・書き込み位置を通過する栽培ベンチに設けられたICタグから前記植物に係る情報を読み取り、前記ICタグに前記植物に係る情報を書き込む読み取り・書き込み装置と、前記搬送装置の動作を制御し、前記読み取り・書き込み装置が前記ICタグから読み取った前記植物に係る情報を受信して記憶し、前記植物に係る情報を前記読み取り・書き込み装置に送信して前記ICタグに記憶させる制御装置と、を具備する。
【0007】
請求項2においては、前記搬送経路の中途部に設定された防除位置に配置され、前記防除位置を通過する栽培ベンチに支持されたプランターに防除剤を散布する防除装置と、前記搬送経路の中途部に設定された薬液供給位置に配置され、前記薬液供給位置を通過する栽培ベンチに支持されたプランターに薬液を供給する薬液供給装置と、前記搬送経路の中途部に設定された水供給位置に配置され、前記水供給位置を通過する栽培ベンチに支持されたプランターに水を供給する水供給装置と、を具備し、前記制御装置は、前記栽培ベンチに設けられたICタグから前記読み取り・書き込み装置を経て受信した前記植物に係る情報に基づいて、前記搬送装置、前記防除装置、前記薬液供給装置および前記水供給装置の動作を制御する。
【0008】
請求項3においては、前記複数のプランターの周囲の気温を検知する温度計と、前記複数のプランターに照射される光の照度を検知する照度計と、を具備し、前記制御装置は、前記温度計により検知された前記複数のプランターの周囲の気温および前記照度計により検知された前記複数のプランターに照射される光の照度に基づいて、前記搬送装置の動作を制御する。
【0009】
請求項4においては、前記温度計および前記照度計は、前記搬送経路に沿って搬送される複数のプランターのそれぞれに対応して設けられる。
【発明の効果】
【0010】
本発明は、搬送経路に沿って搬送される各プランターにより栽培される植物に係る情報の管理が容易となり、トレーサビリティーが向上する、という効果を奏する。
【図面の簡単な説明】
【0011】
【図1】本発明に係る移動栽培装置の実施の一形態を示す平面模式図。
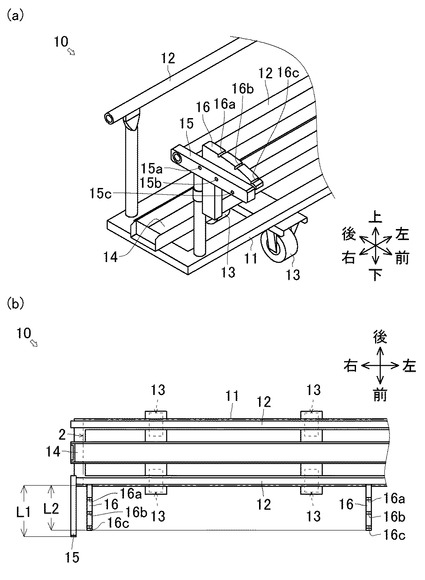
【図2】(a)プランターを示す斜視図、(b)栽培ベンチを示す斜視図。
【図3】プランターが載置された栽培ベンチを示す斜視図。
【図4】(a)栽培ベンチの要部斜視図、(b)栽培ベンチの要部平面図。
【図5】第一縦搬送装置を示す要部斜視図。
【図6】移動用エアシリンダおよび回転用エアシリンダの空圧回路を示す図。
【図7】(a)係止突起が係止位置に配置されているときの一対のロッドおよび回転用エアシリンダを示す正面図、(b)係止突起が退避位置に配置されているときの一対のロッドおよび回転用エアシリンダを示す正面図。
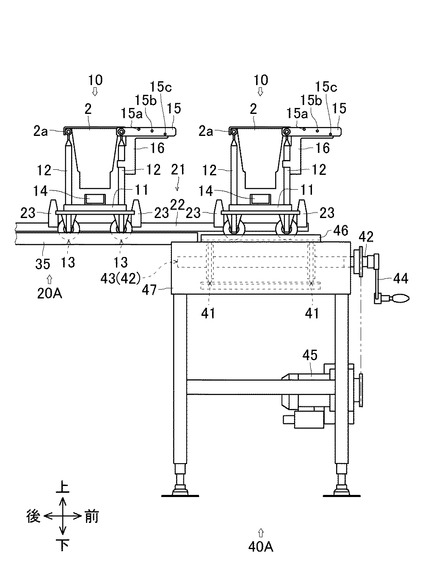
【図8】本発明に係る移動栽培装置の実施の一形態を示す要部右側面図。
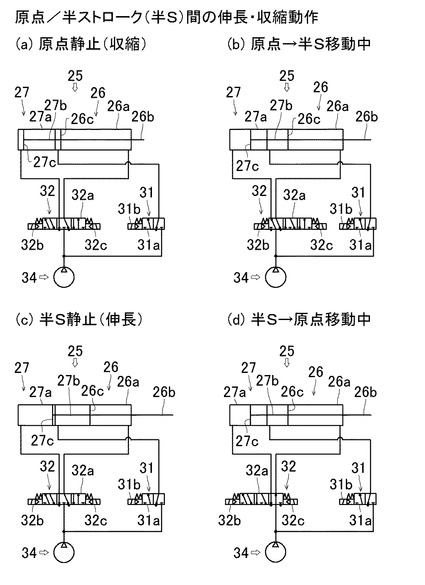
【図9】原点位置と半ストローク位置との間における移動用エアシリンダの伸長・収縮動作を示す模式図。
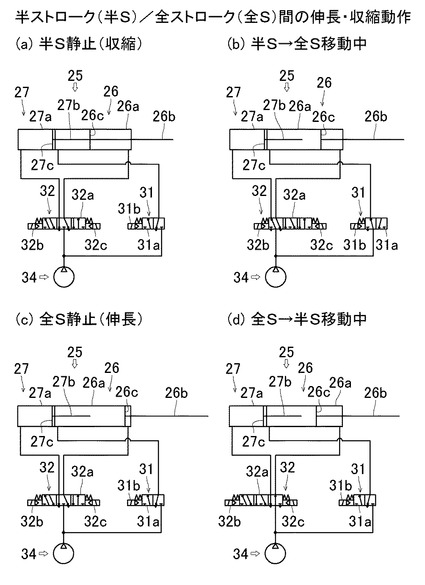
【図10】半ストローク位置と全ストローク位置との間における移動用エアシリンダの伸長・収縮動作を示す模式図。
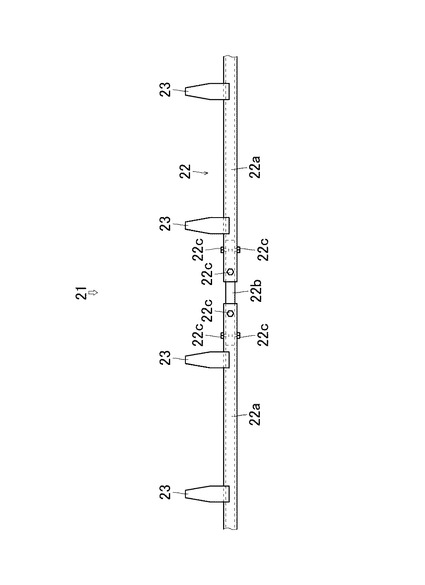
【図11】ロッドの別実施形態を示す要部拡大図。
【発明を実施するための形態】
【0012】
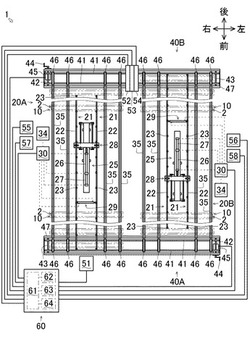
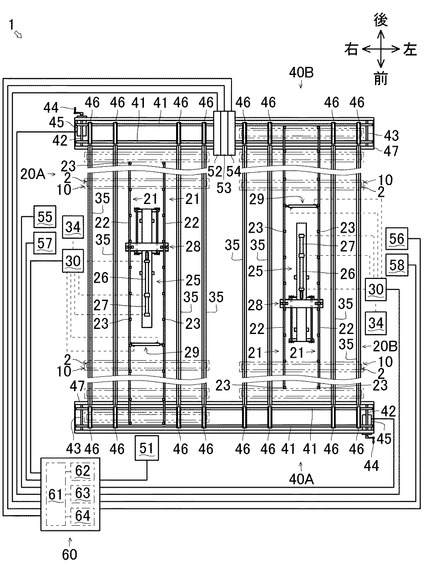
以下では、図面を参照しつつ、本発明に係る移動栽培装置の実施の一形態である移動栽培装置1について説明する。図1に示す如く、移動栽培装置1は複数のプランター2・2・・・、複数の栽培ベンチ10・10・・・、第一縦搬送装置20A、第二縦搬送装置20B、第一横搬送装置40A、第二横搬送装置40B、読み取り・書き込み装置51、防除装置52、薬液供給装置53、水供給装置54、温度計55・56、照度計57・58および制御ユニット60を具備する。
【0013】
本実施形態では重力が作用する方向に基づいて上下方向が定められ、上下方向に垂直な方向として前後方向が定められ、上下方向および前後方向に垂直な方向として左右方向が定められる(図1参照)。以下では便宜上、前後方向を「縦方向」、左右方向を「横方向」と定め、これらの方向を用いて説明する。なお、本実施形態では縦方向および横方向がいずれも水平面に対して平行(上下方向に対して垂直)であるが、本発明はこれに限定されず、植物の栽培に支障をきたさない限度において、縦方向および横方向が水平面に対して多少傾斜していても(水平面に対して平行でなくても)良い。
【0014】
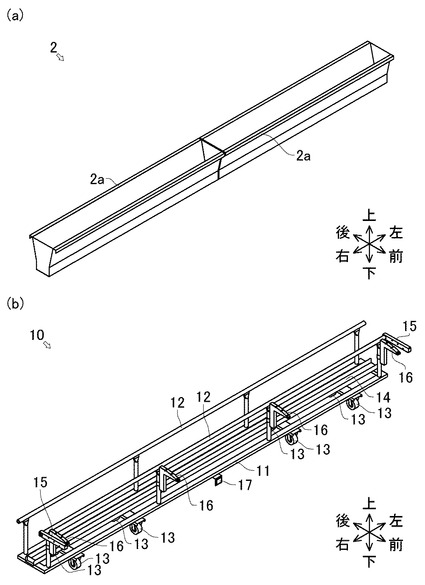
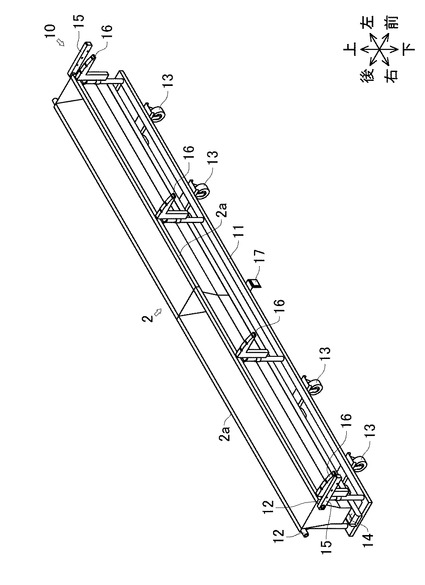
プランター2は植物を栽培するための容器である。図2の(a)に示す如く、プランター2の外形は縦方向に短く、横方向に長い形状を有する。より詳細には、プランター2の外形は概ねその上面に比べて下面の縦方向および横方向における長さが小さい四角錐台形状であり、プランター2の内部には植物およびこれを栽培するための土等を収容する空間が形成される。プランター2の上面は大きく開口し、プランター2の下面には余剰の水および薬液を外部に排出するための排出孔(不図示)が形成される。また、プランター2の上面の前端部および後端部にはそれぞれ係止片2a・2aが形成される。
なお、本実施形態のプランター2はイチゴを栽培する用途に用いられるが、本発明に係る移動栽培装置は他の種々の植物を栽培する用途に適用することが可能である。
【0015】
栽培ベンチ10は、プランター2を支持し、移動栽培装置1の搬送装置(第一縦搬送装置20A、第二縦搬送装置20B、第一横搬送装置40Aおよび第二横搬送装置40B)により搬送されるものである。
図2の(b)に示す如く、栽培ベンチ10はロアフレーム11、一対のアッパーフレーム12・12、八つの車輪13・13・・・、受け樋14、一対の規制アーム15・15、四つの支持アーム16・16・16・16およびICタグ17を備える。
【0016】
ロアフレーム11および一対のアッパーフレーム12・12は本発明に係るベンチフレームの実施の一形態であり、栽培ベンチ10の主たる構造体を成す。本実施形態のロアフレーム11は角パイプを平面視矩形の枠状に組み合わせたものである。本実施形態の一対のアッパーフレーム12・12はそれぞれ、その長手方向が左右方向に平行な長い丸パイプ、および当該丸パイプに一端部(上端部)が固定されるとともに他端部(下端部)が下方に延びた四本の短い丸パイプを有する。一対のアッパーフレーム12・12はそれぞれロアフレーム11の前端部および後端部に設けられる。図3に示す如く、プランター2がロアフレーム11の上面において一対のアッパーフレーム12・12で挟まれる部分に載置されたとき、プランター2の係止片2a・2aは一対のアッパーフレーム12・12に係止される。このように、プランター2は栽培ベンチ10に支持され、左右横方向から引き出したり、取り出したりすることができ、プランター2の入れ替えが容易にできる。
車輪13・13・・・はロアフレーム11の下方に設けられ、ロアフレーム11および一対のアッパーフレーム12・12を支持する。車輪13・13・・・は前後方向に回転可能である。ただし、移動が容易にできるようにキャスター輪で構成することもできる。
受け樋14はプランター2の下面に形成された排出孔から排出された余剰の水および薬液を受け止める部材である。本実施形態の受け樋14は金属板を適宜折り曲げることにより製造され、左右方向に長い矩形状の底板、および当該底板の前端部および後端部から上方に延びる左右方向に長い矩形状の一対の壁板を有する。受け樋14の上面および左端面は開口し、受け樋14の右端面は別の板材により閉塞される。受け樋14はロアフレーム11の上面の前後方向における略中央部に固定される。プランター2が栽培ベンチ10に支持されたとき、受け樋14はプランター2の下面(ひいては、プランター2の下面に形成された排出孔)の下方に配置される。
【0017】
一対の規制アーム15・15は本発明に係る一対の規制部材の実施の一形態である。規制アーム15・15はいずれも角棒状の部材であり、その一端部(基端部)はそれぞれ前側のアッパーフレーム12の左右端部に固定され、他端部(先端部)は前側のアッパーフレーム12よりも前方に突出する。従って、プランター2がロアフレーム11の上面に載置されたとき、一対の規制アーム15・15の基端部はプランター2の上面開口部の左右端部に配置され、一対の規制アーム15・15の先端部は前方に突出する。よって、左右方向において栽培ベンチ10・10が隣り合う場合、規制アーム15・15同士が当接することになり、プランター2や植物が損傷することを防止できる。また、一対の規制アーム15・15にはそれぞれ左右の側面を貫通する固定孔15a・15b・15cが形成される(図4の(a)参照)。
【0018】
支持アーム16・16・16・16は本発明に係る支持部材の実施の一形態である。本実施形態の支持アーム16・16・16・16はいずれも樹脂成型品であり、上下方向に延び、そこから屈曲して前方に延びた形状を有する。支持アーム16・16・16・16の基端部はそれぞれ前側のアッパーフレーム12を構成する四つの短い丸パイプに固定される。従って、プランター2がアッパーフレーム12の上面に載置されたとき、支持アーム16・16・16・16の基端部はプランター2の上面開口部の左右方向(横方向)における中途部に配置されるとともに支持アーム16・16・16・16の先端部(前後方向に延びた部分)は前方(縦方向)に突出する。支持アーム16・16・16・16の上面は前方に向かって緩やかに下方に傾斜する曲面を成す。支持アーム16・16・16・16の上面にはそれぞれ支持アーム16の左右側面まで切り通された案内溝16a・16b・16cが形成される(図4の(a)参照)。
【0019】
一対の規制アーム15・15および支持アーム16・16・16・16は、「プランター2により栽培される植物においてプランター2の外部まで伸長した部分」を下方から支持することにより当該部分を保護する保護部材を、栽培ベンチ10に支持されたプランター2の前方に配置するための部材である。本実施形態の保護部材は三本の線材(紐、ワイヤー等、線状の部材)である。これら三本の線材の一端部にそれぞれ固定孔15a・15b・15cよりも大きい結び目を形成し、これら三本の線材の他端部をそれぞれ一対の規制アーム15・15の固定孔15a・15b・15cに通し、これら三本の線材の他端部に固定孔15a・15b・15cよりも大きい結び目を形成する、という一連の作業により、これら三本の線材の両端部は一対の規制アーム15・15に固定され、一対の規制アーム15・15の間に張られる。これら三本の線材が一対の規制アーム15・15の間に張られたとき、これら三本の線材の中途部はそれぞれ支持アーム16・16・16・16の案内溝16a・16b・16cに嵌合し、支持アーム16・16・16・16により下方から支持される。このように、これら三本の線材の中途部がそれぞれ支持アーム16・16・16・16の案内溝16a・16b・16cに嵌合することにより、三本の線材がその上方に載る植物の重量により下方に撓んだり、前後方向(縦方向)にずれたりすることを防止することが可能である。
なお、本実施形態では保護部材が三本の線材の場合について説明したが、本発明に係る保護部材はこれに限定されず、例えば金属あるいは合成繊維からなるネットやシート等でも良い。
【0020】
図4の(b)に示す如く、一対の規制アーム15・15の前後方向(縦方向)における突出量L1は、支持アーム16・16・16・16の前後方向(縦方向)における突出量L2よりも大きい(L1>L2)。なお、これらの突出量の差分(=L1−L2)はプランター2により栽培される植物、特に当該植物から収穫される果実等の収穫物の大きさに基づいて定められる。このように構成することにより、前後方向(縦方向)において隣り合う栽培ベンチ10・10が互いに接近したとき、一方の(本実施形態の場合、後側の)栽培ベンチ10における一対の規制アーム15・15の前端部は、他方の(本実施形態の場合、前側の)栽培ベンチ10における後側のアッパーフレーム12(より厳密には、後側のアッパーフレーム12を構成する長い丸パイプの左右両端部)に当接する。従って、前後方向において隣り合う栽培ベンチ10・10がそれ以上に接近することはない。
また、一方の栽培ベンチ10における一対の規制アーム15・15の前端部が他方の栽培ベンチ10に当接したとき、一方の栽培ベンチ10における支持アーム16・16・16・16の前端部と他方の栽培ベンチ10との間には、一対の規制アーム15・15の前後方向における突出量L1と支持アーム16・16・16・16の前後方向における突出量L2との差分(=L1−L2)だけ隙間が形成される。従って、一方の栽培ベンチ10に対応するプランター2により栽培される植物において支持アーム16・16・16・16の前端部よりも前方まで伸長した部分が当該隙間に収まるので、当該部分が隣り合う栽培ベンチ10・10に挟まれて損傷することを防止することが可能である。
【0021】
ICタグ17はロアフレーム11の前端部かつ左右方向における略中央部となる位置に設けられる。ICタグ17は対応するプランター2(ICタグ17が設けられた栽培ベンチ10に支持されるプランター2)により栽培される植物に係る情報を記憶する(読み書きできる)。このように、ICタグ17を用いることによりトレーサビリティーが向上する。
ここで、ICタグ17が記憶する「対応するプランター2により栽培される植物に係る情報」の具体例としては、プランター2により栽培される植物のロット番号(植物を特定するための番号)、品種、栽培開始日(播種や移植等)、植密度、開花日、収穫日、収穫量、品質、後述する防除作業の内容(防除剤の種類、散布量等)および日時、後述する薬液供給作業の内容(薬液の種類、供給量等)および日時、後述する水供給作業の内容(水の供給量等)および日時、その他植物に対して施された各種作業(摘心、誘引、摘果等)の履歴、後述する照度の推移(日照量)、後述する気温の推移、1日当たりのローテーション数等が挙げられる。
【0022】
第一縦搬送装置20A、第二縦搬送装置20B、第一横搬送装置40Aおよび第二横搬送装置40Bは本発明に係る搬送装置の実施の一形態であり、それぞれプランター2を支持した複数の栽培ベンチ10・10・・・を搬送する。
図1に示す如く、第一縦搬送装置20Aおよび第二縦搬送装置20Bは左右方向(横方向)に並べて配置され、栽培ベンチ10・10・・・(ひいては、これらに支持されるプランター2・2・・・)を前後方向(縦方向)に搬送する。第一横搬送装置40Aおよび第二横搬送装置40Bは栽培ベンチ10・10・・・(プランター2・2・・・)を左右方向(横方向)に搬送する。
【0023】
第一横搬送装置40Aの右半部は第一縦搬送装置20Aの前端部の前方に配置され、第一横搬送装置40Aの左半部は第二縦搬送装置20Bの前端部の前方に配置される。
第二横搬送装置40Bの右半部は第一縦搬送装置20Aの後端部の後方に配置され、第二横搬送装置40Bの左半部は第二縦搬送装置20Bの後端部の後方に配置される。
第一横搬送装置40Aおよび第二横搬送装置40Bはいずれも、栽培ベンチ10・10・・・(プランター2・2・・・)を第一縦搬送装置20Aおよび第二縦搬送装置20Bとの間で受け渡すことが可能である。
従って、移動栽培装置1は、第一縦搬送装置20Aから第一横搬送装置40A、第二縦搬送装置20Bおよび第二横搬送装置40Bを経て第一縦搬送装置20Aに戻る無端状(リング状)の搬送経路に沿って栽培ベンチ10・10・・・(プランター2・2・・・)を搬送することが可能である。なお、本実施形態の移動栽培装置1は、栽培ベンチ10・10・・・(プランター2・2・・・)を搬送経路に沿って平面視(図1参照)で反時計回りに搬送することおよび時計回りに搬送することが可能である。
以下では便宜上、平面視反時計回りに搬送する場合の搬送方向を「正方向」、平面視時計回りに搬送する場合の搬送方向を「逆方向」と定義し、これらの方向を用いて説明する。
【0024】
本実施形態では第一縦搬送装置20Aおよび第二縦搬送装置20Bの基本的な構造は同じである(ただし、平面視で互いに180°回転した向きで配置される)ことから、以下では第一縦搬送装置20Aについて説明し、第二縦搬送装置20Bの説明を省略する。
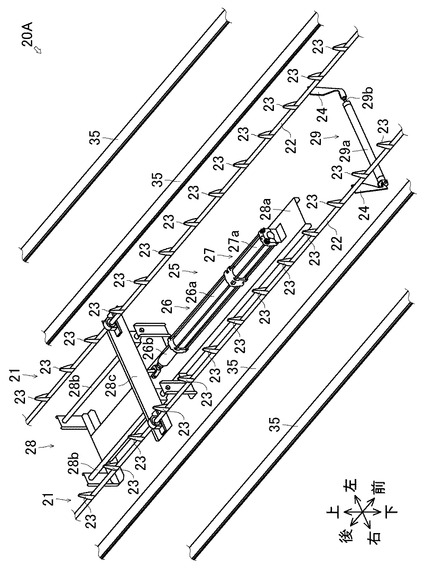
図1に示す如く、第一縦搬送装置20Aは四つのレール35・35・35・35、シリンダブラケット28、一対のロッド21・21、移動用エアシリンダ25、回転用エアシリンダ29、バルブユニット30、エアコンプレッサ34およびこれらの部材を支持するフレーム(不図示)を備える。
【0025】
レール35・35・35・35は、栽培ベンチ10・10・・・が第一縦搬送装置20Aにより搬送されるときに車輪13・13・・・が走行する経路を成す部材である。
本実施形態のレール35・35・35・35は前後方向(縦方向)に長い金属板を折り曲げ、前後方向(縦方向)から見て概ね上方に開口するV字形に成形したものである。このような簡単な構成のレール35は安価で容易に得ることができ、車輪13が走行時に外れることがなく、栽培ベンチ10を容易に案内することができる。レール35・35・35・35は左右方向(横方向)に間隔を空けて並べられ、第一縦搬送装置20Aのフレームに固定される。栽培ベンチ10が第一縦搬送装置20Aによって前後方向(縦方向)に搬送されるとき、栽培ベンチ10の車輪13・13・・・はレール35・35・35・35に嵌合しつつレール35・35・35・35の長手方向に転がる。
【0026】
図1および図5に示す如く、一対のロッド21・21はレール35・35・35・35のうち左端から二番目のレール35と左端から三番目のレール35とで挟まれる位置に配置され、互いに左右方向に並べられる。一対のロッド21・21は互いに左右対称であることから、以下では一方のロッド21について説明し、他方については説明を省略する。
【0027】
ロッド21はロッド本体22、複数の係止突起23・23・・・およびアーム24を有する。本実施形態のロッド本体22は金属製の丸パイプであり、ロッド本体22の長手方向が前後方向(縦方向)に平行に配置され、かつ前後方向に移動可能に第一縦搬送装置20Aのフレームに支持される。複数の係止突起23・23・・・は前後方向に所定の間隔を空けて並べられ、ロッド本体22(の外周面)に固定される。複数の係止突起23・23・・・の前後方向の間隔(所定の間隔)は栽培ベンチ10のロアフレーム11の前後方向の長さよりも長い間隔に設定される。ロッド本体22に固定された係止突起23・23・・・はロッド本体22の半径方向(ロッド本体22の長手方向に垂直な方向)に突出する。アーム24は棒状の部材であり、アーム24の一端部がロッド本体22に固定され、アーム24の他端部はロッド本体22の半径方向に突出する。
【0028】
なお、図11に示す如く、ロッド本体22は複数のロッド片22a・22a・・・で構成し、ロッド片22a・22aの端部に連結部材22bを差し込み、ロッド片22a・22aと連結部材22bとをボルト22c・22c・・・で締結することによりロッド片22a・22aを長手方向に連結しても良い。このように構成することにより、移動栽培装置1が設置される場所の広さに応じて第一縦搬送装置20Aおよび第二縦搬送装置20Bの縦方向の長さを容易に変更することが可能である。
【0029】
図5に示す如く、シリンダブラケット28は固定部材28a、一対のスライドレール28b・28bおよびスライド部材28cを有する。
固定部材28aはフレーム(不図示)に固定される。一対のスライドレール28b・28bは丸棒状の部材であり、互いに左右方向(横方向)に並んで配置され、これらの両端部は固定部材28aに固定される。スライドレール28b・28bの両端部が固定部材28aに固定されたとき、スライドレール28b・28bの長手方向は前後方向に平行となる。スライド部材28cは一対のスライドレール28b・28bに支持される。スライド部材28cはスライドレール28b・28bの長手方向(前後方向)に移動可能である。
【0030】
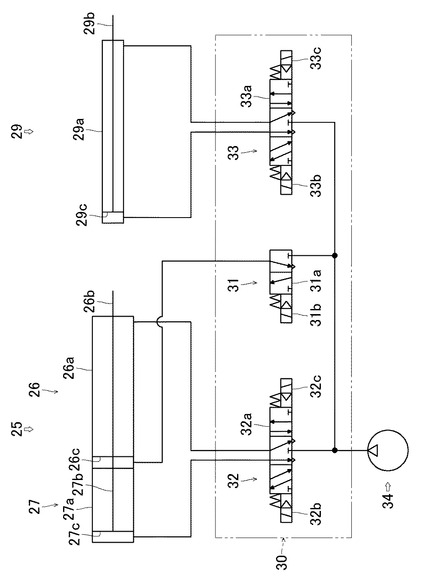
図5に示す如く、移動用エアシリンダ25は主移動用エアシリンダ26および副移動用エアシリンダ27を有する。図6に示す如く、主移動用エアシリンダ26はシリンダ本体26a、シリンダロッド26bおよびピストン26cを有する。シリンダ本体26aは内部に空間が形成された円筒状の部材である。シリンダロッド26bは棒状の部材であり、その中途部がシリンダ本体26aの一端部に気密的かつ長手方向に移動可能に支持される。ピストン26cはシリンダ本体26aの内部に収容され、シリンダ本体26aの内周面に気密的かつ長手方向に移動可能に当接し、シリンダロッド26bの一端部(シリンダ本体26aの内部に収容されている方の端部)に固定される。
図6に示す如く、副移動用エアシリンダ27はシリンダ本体27a、シリンダロッド27bおよびピストン27cを有する。シリンダ本体27aは内部に空間が形成された円筒状の部材である。シリンダ本体27aの一端部はシリンダ本体26aの他端部に固定される。シリンダロッド27bは棒状の部材であり、その中途部がシリンダ本体27aの一端部およびシリンダ本体26aの他端部に気密的かつ長手方向に移動可能に支持される。従って、シリンダロッド27bの一端部はシリンダ本体27aの内部の空間に収容される。また、シリンダロッド27bの他端部はシリンダ本体26aの内部の空間に収容され、ピストン26cに当接可能である。ピストン27cはシリンダ本体27aの内部に収容され、シリンダ本体27aの内周面に気密的かつ長手方向に移動可能に当接し、シリンダロッド27bの一端部に固定される。なお、本実施形態ではシリンダ本体27aの一端部にシリンダ本体27aの内部空間と外部とを連通する連通孔が形成される。
【0031】
図5に示す如く、副移動用エアシリンダ27のシリンダ本体27aの他端部、すなわち移動用エアシリンダ25の基端部は固定部材28aに固定される。移動用エアシリンダ25の基端部が固定部材28aに固定されたとき、シリンダロッド26bの長手方向は前後方向(縦方向)に平行となり、シリンダロッド26bの他端部(シリンダ本体26aの外部に突出している方の端部)は後方を向く。また、シリンダロッド26bの他端部はスライド部材28cに固定される。一対のロッド21・21の中途部は、スライド部材28cに対して長手方向の軸中心に回転可能かつ前後方向(縦方向)に相対移動不能に支持される。従って、移動用エアシリンダ25が伸長したときにはスライド部材28cおよび一対のロッド21・21は後方に移動し、移動用エアシリンダ25が収縮したときにはスライド部材28cおよび一対のロッド21・21は前方に移動する。
【0032】
図6に示す如く、シリンダロッド27bが最大限にシリンダ本体27aに没入し、かつシリンダロッド26bが最大限に(ピストン26cがシリンダロッド27bに当接するまで)没入しているとき、シリンダロッド26bがシリンダ本体26aの外部に突出している長さ(シリンダロッド26bの突出量)は最小となる。以下、このときのシリンダロッド26bの位置を「原点位置」という。シリンダロッド27bがシリンダ本体27aから最大限に突出し、かつピストン26cがシリンダロッド27bに当接するまでシリンダロッド26bが没入しているとき、シリンダロッド26bがシリンダ本体26aの外部に突出している長さ(シリンダロッド26bの突出量)はシリンダロッド26bの長さの概ね半分となる。以下、このときのシリンダロッド26bの位置を「半ストローク位置」という。シリンダロッド26bが最大限に突出しているとき、シリンダロッド26bがシリンダ本体26aの外部に突出している長さ(シリンダロッド26bの突出量)は最大となる。このときのシリンダロッド26bの位置を「全ストローク位置」という。このように、主移動用エアシリンダ26および副移動用エアシリンダ27は互いに直列的に連結され、それぞれ伸長・収縮することが可能である。また、主移動用エアシリンダ26および副移動用エアシリンダ27の伸長・収縮の組み合わせにより、シリンダロッド26bの位置を原点位置、半ストローク位置および全ストローク位置のいずれかに多段的に変更すること(一対のロッド21・21を前後方向(縦方向)に多段階に移動させること)が可能である。
【0033】
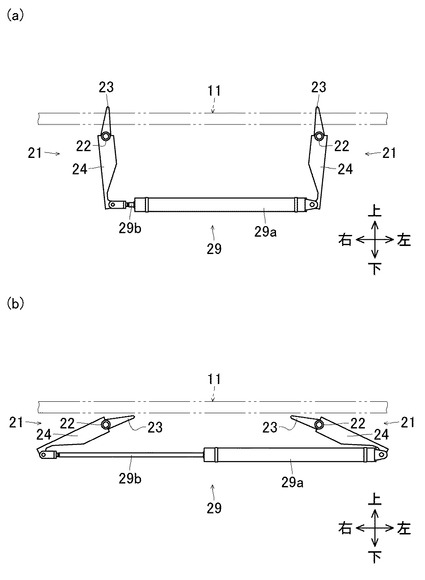
図6に示す如く、回転用エアシリンダ29はシリンダ本体29a、シリンダロッド29bおよびピストン29cを有する。シリンダ本体29aは内部に空間が形成された円筒状の部材である。シリンダロッド29bは棒状の部材であり、その中途部がシリンダ本体29aの一端部に気密的かつ長手方向に移動可能に支持される。ピストン29cはシリンダ本体29aの内部に収容され、シリンダ本体29aの内周面に気密的かつ長手方向に移動可能に当接し、シリンダロッド29bの一端部(シリンダ本体29aの内部に収容されている方の端部)に固定される。図5に示す如く、回転用エアシリンダ29の基端部(シリンダ本体29aの他端部)は右側のロッド21におけるアーム24の他端部に回動可能に連結され、回転用エアシリンダ29の先端部(シリンダロッド29bの他端部)は左側のロッド21におけるアーム24の他端部に回動可能に連結される。
【0034】
図7の(a)に示す如く、回転用エアシリンダ29が収縮しているとき、一対のロッド21・21の係止突起23・23・・・は一対のロッド21・21の外周面から概ね上方に突出する位置に配置される。以下、回転用エアシリンダ29が収縮しているときの係止突起23・23・・・の位置を「係止位置」という。
回転用エアシリンダ29が収縮した状態(図7の(a)に示す状態)から伸長したとき、一対のロッド21・21は係止突起23・23・・・が内側に向かって傾倒する方向に軸回転する。より詳細には、右側のロッド21が長手方向の軸を中心として正面視で時計回りに回動し、左側のロッド21が長手方向の軸を中心として正面視で反時計回りに回動する。その結果、図7の(b)に示す如く、回転用エアシリンダ29が伸長しているとき、右側のロッド21の係止突起23・23・・・は右側のロッド21の外周面から概ね左側方に突出する位置に配置され、左側のロッド21の係止突起23・23・・・は左側のロッド21の外周面から概ね右側方に突出する位置に配置される。回転用エアシリンダ29が伸長しているときの係止突起23・23・・・の位置を「退避位置」という。
【0035】
図7の(a)および図8に示す如く、係止突起23・23・・・が「係止位置」に配置されているとき、係止突起23・23・・・の先端部(ロッド21・21の外周面から突出している方の端部)は、車輪13・13・・・がレール35・35・・・に嵌合した状態における栽培ベンチ10のロアフレーム11の下面よりも上方に配置される。従って、係止突起23・23・・・が「係止位置」に配置された状態を保持しつつ一対のロッド21・21が前後方向(縦方向)に移動することにより、栽培ベンチ10を前後方向(縦方向)に移動させる(搬送する)ことが可能である。より詳細には、係止突起23・23・・・が「係止位置」に配置された状態を保持しつつ一対のロッド21・21が前方に移動したとき、係止突起23・23・・・が栽培ベンチ10のロアフレーム11の後面に当接し、栽培ベンチ10が係止突起23・23・・・に押されて前方に移動する。また、係止突起23・23・・・が「係止位置」に配置された状態を保持しつつ一対のロッド21・21が後方に移動したとき、係止突起23・23・・・が栽培ベンチ10のロアフレーム11の前面に当接し、栽培ベンチ10が係止突起23・23・・・に押されて後方に移動する。
【0036】
また、図7の(b)に示す如く、係止突起23・23・・・が「退避位置」に配置されているとき、係止突起23・23・・・の先端部(ロッド21・21の外周面から突出している端部)は、車輪13・13・・・がレール35・35・・・に嵌合した状態における栽培ベンチ10のロアフレーム11の下面よりも下方に配置される。従って、係止突起23・23・・・が「退避位置」に配置された状態を保持しつつ一対のロッド21・21が前後方向(縦方向)に移動したとき、係止突起23・23・・・はロアフレーム11、ひいては栽培ベンチ10に当接しない(干渉しない)ので、栽培ベンチ10は前後方向に移動しない。
【0037】
図6に示す如く、バルブユニット30は主移動用バルブ31、副移動用バルブ32、回転用バルブ33およびこれらを収容する本体(不図示)を有する。
【0038】
主移動用バルブ31はバルブスプール31aおよびソレノイド31bを有する。バルブスプール31aはバルブユニット30の本体に形成された空間に収容されつつ、伸長位置および収縮位置のいずれかの位置に移動することが可能(摺動可能)である。ソレノイド31bはバルブスプール31aを収縮位置から伸長位置に移動させるためのソレノイドである。主移動用バルブ31はシリンダ本体26aの他端部に接続される。
ソレノイド31bに通電しているとき、バルブスプール31aは収縮位置から伸長位置に移動し、伸長位置で保持される。ソレノイド31bに通電していないとき、バルブスプール31aは伸長位置から収縮位置に移動し、収縮位置で保持される。
【0039】
副移動用バルブ32はバルブスプール32a、ソレノイド32bおよびソレノイド32cを有する。バルブスプール32aはバルブユニット30の本体に形成された空間に収容されつつ、中立位置、伸長位置および収縮位置のいずれかの位置に移動することが可能(摺動可能)である。ソレノイド32bはバルブスプール32aを中立位置から伸長位置に移動させるためのソレノイドである。ソレノイド32cはバルブスプール32aを中立位置から収縮位置に移動させるためのソレノイドである。副移動用バルブ32はシリンダ本体26aの一端部およびシリンダ本体27aの他端部に接続される。
主移動用バルブ31および副移動用バルブ32を合わせたものは本発明に係る移動用開放弁の実施の一形態であり、移動用エアシリンダ25、主移動用バルブ31および副移動用バルブ32を合わせたものは本発明に係る移動用アクチュエータの実施の一形態である。
ソレノイド32bに通電し、かつソレノイド32cに通電していないとき、バルブスプール32aは中立位置から伸長位置に移動し、伸長位置で保持される。ソレノイド32cに通電し、かつソレノイド32bに通電していないとき、バルブスプール32aは中立位置から収縮位置に移動し、収縮位置で保持される。ソレノイド32bおよびソレノイド32bの両方に通電していないとき、バルブスプール32aは中立位置で保持される。
【0040】
回転用バルブ33はバルブスプール33a、ソレノイド33bおよびソレノイド33cを有する。バルブスプール33aはバルブユニット30の本体に形成された空間に収容されつつ、中立位置、伸長位置および収縮位置のいずれかの位置に移動することが可能(摺動可能)である。ソレノイド33bはバルブスプール33aを中立位置から伸長位置に移動させるためのソレノイドである。ソレノイド33cはバルブスプール33aを中立位置から収縮位置に移動させるためのソレノイドである。回転用バルブ33はシリンダ本体29aの一端部および他端部に接続される。回転用バルブ33は本発明に係る回転用開放弁の実施の一形態である。また、回転用エアシリンダ29および回転用バルブ33を合わせたものは本発明に係る回転用アクチュエータの実施の一形態である。
ソレノイド33bに通電し、かつソレノイド33cに通電していないとき、バルブスプール33aは中立位置から伸長位置に移動し、伸長位置で保持される。ソレノイド33cに通電し、かつソレノイド33bに通電していないとき、バルブスプール33aは中立位置から収縮位置に移動し、収縮位置で保持される。ソレノイド33bおよびソレノイド33bの両方に通電していないとき、バルブスプール33aは中立位置で保持される。
【0041】
エアコンプレッサ34は主移動用バルブ31、副移動用バルブ32および回転用バルブ33に接続され、これらのバルブを通じて移動用エアシリンダ25および回転用エアシリンダ29に圧縮されたエアを供給する。
【0042】
以下では図1を用いて第一横搬送装置40Aおよび第二横搬送装置40Bについて説明する。第一横搬送装置40Aおよび第二横搬送装置40Bはいずれも複数の栽培ベンチ10・10・・・を搬送面(本実施形態の場合、後述する一対のチェーン41・41の外周面に固定された載置板46・46・・・のうち一対のチェーン41・41の上方に配置されているものの底板の上側の板面)に載置して左右方向(横方向)に搬送するチェーンコンベアである。本実施形態では第一横搬送装置40Aおよび第二横搬送装置40Bの基本的な構造は同じである(ただし、平面視で互いに180°回転した向きで配置される)ことから、以下では第一横搬送装置40Aの詳細について説明し、第二横搬送装置40Bの詳細な説明を省略する。
第一横搬送装置40Aは一対のチェーン41・41、駆動軸42、従動軸43、ハンドル44、モータ45、載置板46・46・・・およびフレーム47を備える。
【0043】
一対のチェーン41・41はいずれも無端状である。駆動軸42および従動軸43はそれぞれフレーム47の左上端部および右上端部に回転可能に軸支される。駆動軸42および従動軸43の中途部にはいずれも間隔を空けて二つのスプロケットが固定される。また、駆動軸42の一端部(前端部)にはさらに別のスプロケットが固定される。一対のチェーン41・41はそれぞれ駆動軸42に固定されたスプロケットおよび従動軸43に固定されたスプロケットに巻回される。ハンドル44は駆動軸42の一端部(前端部)に固定される。作業者がハンドル44を手で回すことにより、駆動軸42、ひいては一対のチェーン41・41を回転させることが可能である。モータ45は電気式のサーボモータであり、駆動軸42、ひいては一対のチェーン41・41を回転駆動するための駆動源を成す。モータ45はフレーム47において駆動軸42の下方となる位置に固定される。モータ45の出力軸にはスプロケットが固定される。モータ45の出力軸に固定されたスプロケットおよび駆動軸42の一端部に固定されたスプロケットにはチェーン(図1において不図示)が巻回され、モータ45の駆動力により、駆動軸42、ひいては一対のチェーン41・41が回転駆動される。載置板46・46・・・は第一縦搬送装置20Aあるいは第二縦搬送装置20Bから受け渡された栽培ベンチ10の車輪13・13・・・を支持する。本実施形態の載置板46・46・・・は上下一対の板面を有する底部、および底部の左右端部から上方に延びた一対のガイド部を有する部材であり、前後方向にやや長い金属板を折り曲げることにより製造される。載置板46・46・・・は間隔を空けて一対のチェーン41・41に固定され、一対のチェーン41・41と一体となって回転する。
図1に示す如く、載置板46・46・・・は第一縦搬送装置20Aの前方に移動したときには第一縦搬送装置20Aのレール35・35・35・35の前方に配置され、第二縦搬送装置20Bの前方に移動したときには第一縦搬送装置20Aのレール35・35・35・35の前方に配置される。栽培ベンチ10の車輪13・13・・・が載置板46・46・・・に支持された状態で一対のチェーン41・41が回転することにより、第一横搬送装置40Aは栽培ベンチ10を左右方向(横方向)に搬送する。
【0044】
図8に示す如く、第一縦搬送装置20Aの一対のロッド21・21は、第一横搬送装置40Aの搬送面(載置板46・46・・・のうち一対のチェーン41・41の上方に配置されているものの底板の上側の板面)よりも上方、かつ第一横搬送装置40Aの搬送面に載置された(車輪13・13・・・が載置板46・46・・・に支持された)栽培ベンチ10のロアフレーム11の下面よりも下方となる高さに配置される。
従って、係止突起23・23・・・が「退避位置」に配置された一対のロッド21・21は、第一横搬送装置40Aの搬送面に載置された栽培ベンチ10および第一横搬送装置40Aに干渉(接触)することなく前後方向(縦方向)に移動することが可能である。
【0045】
図1に示す如く、読み取り・書き込み装置51は移動栽培装置1の搬送経路の中途部、より詳細には第一横搬送装置40Aの右半部に沿った位置に配置される。ここで、「第一横搬送装置40Aの右半部に沿った位置」は本実施形態において予め設定された「読み取り・書き込み位置」に相当する。読み取り・書き込み装置51は「読み取り・書き込み位置」を通過する栽培ベンチ10に設けられたICタグ17から「当該栽培ベンチ10に支持されたプランター2により栽培される植物に係る情報」を読み取り、ICタグ17に「当該栽培ベンチ10に支持されたプランター2により栽培される植物に係る情報」を書き込むことが可能である。
【0046】
防除装置52は移動栽培装置1の搬送経路の中途部、より詳細には第二横搬送装置40Bの左右方向における略中央部に配置される。ここで、「第二横搬送装置40Bの左右方向における略中央部」は本実施形態において予め設定された「防除位置」に相当する。防除装置52は、第二横搬送装置40Bが左右方向(横方向)に搬送することにより「防除位置」を通過する栽培ベンチ10に支持されたプランター2(ひいては、プランター2により栽培される植物)に防除剤(植物の病害および虫害を防止するための薬剤)を散布する。
本実施形態の防除装置52は防除剤を圧送する配管、当該配管に設けられる散布ノズル、当該散布ノズルへの防除剤の供給およびその停止を切り替える電磁バルブを備える。
【0047】
薬液供給装置53は移動栽培装置1の搬送経路の中途部、より詳細には第二横搬送装置40Bの左右方向における略中央部に配置される。ここで、「第二横搬送装置40Bの左右方向における略中央部」は本実施形態において予め設定された「薬液供給位置」に相当する。薬液供給装置53は第二横搬送装置40Bが左右方向(横方向)に搬送することにより「薬液供給位置」を通過する栽培ベンチ10に支持されたプランター2(ひいては、プランター2により栽培される植物)に薬液を供給する。本実施形態の薬液供給装置53は薬液を圧送する配管、当該配管に設けられる薬液供給ノズル、当該薬液供給ノズルへの薬液の供給およびその停止を切り替える電磁バルブを備える。
【0048】
水供給装置54は移動栽培装置1の搬送経路の中途部、より詳細には第二横搬送装置40Bの左右方向における略中央部に配置される。ここで、「第二横搬送装置40Bの左右方向における略中央部」は本実施形態において予め設定された「水供給位置」に相当する。
水供給装置54は第二横搬送装置40Bが左右方向(横方向)に搬送することにより「水供給位置」を通過する栽培ベンチ10に支持されたプランター2(ひいては、プランター2により栽培される植物)に水を供給する(潅水する)。本実施形態の水供給装置54は水を圧送する配管、当該配管に設けられる水供給ノズル、当該水供給ノズルへの水の供給およびその停止を切り替える電磁バルブを備える。
【0049】
温度計55・56はプランター2・2・・・の周囲の雰囲気の温度(気温)を検知する。温度計55は第一縦搬送装置20Aの右側方となる位置に配置され、温度計56は第二縦搬送装置20Bの左側方となる位置に配置される。
本実施形態では温度計55は搬送経路の右半部(第一縦搬送装置20A、第一横搬送装置40Aの右半部および第二横搬送装置40Bの右半部)に配置された栽培ベンチ10・10・・・に支持されるプランター2・2・・・の周囲の気温を検知するものとみなされ、温度計56は搬送経路の左半部(第二縦搬送装置20B、第一横搬送装置40Aの左半部および第二横搬送装置40Bの左半部)に配置された栽培ベンチ10・10・・・に支持されるプランター2・2・・・の周囲の気温を検知するものとみなされる。
【0050】
照度計57・58はプランター2・2・・・に照射される光の照度を検知する。照度計57は第一縦搬送装置20Aの右側方となる位置に配置され、照度計58は第二縦搬送装置20Bの左側方となる位置に配置される。
本実施形態では照度計57は搬送経路の右半部に配置された栽培ベンチ10・10・・・に支持されるプランター2・2・・・に照射される光の照度を検知するものとみなされ、照度計58は搬送経路の左半部に配置された栽培ベンチ10・10・・・に支持されるプランター2・2・・・に照射される光の照度を検知するものとみなされる。
【0051】
制御ユニット60は制御部61、入力部62、表示部63および出力部64を備える。
図1に示す如く、制御ユニット60は第一横搬送装置40Aの右端部の前方となる位置に配置される。
【0052】
制御部61は本発明に係る制御装置の実施の一形態であり、移動栽培装置1の各部(移動栽培装置1の搬送装置、読み取り・書き込み装置51、防除装置52、薬液供給装置53および水供給装置54)の動作を制御する。制御部61は種々のプログラム等を格納し、これらのプログラム等を展開し、これらのプログラム等に従って所定の演算を行い、当該演算の結果等を記憶することができる。本実施形態の制御部61はバスで接続されたCPU、ROM、RAM等を備える。
【0053】
制御部61は第一縦搬送装置20Aのバルブユニット30および第二縦搬送装置20Bのバルブユニット30に接続され、これらのバルブユニット30が有するバルブ群(主移動用バルブ31、副移動用バルブ32、回転用バルブ33)が動作するための信号を送信する(これらのバルブのソレノイドに通電する)ことが可能である。
制御部61は第一縦搬送装置20Aにおけるシリンダロッド26b・27b・29bの位置を検出するセンサ(不図示)および第二縦搬送装置20Bにおけるシリンダロッド26b・27b・29bの位置を検出するセンサ(不図示)に接続され、これらのシリンダロッドの位置に係る情報を受信することが可能である。
制御部61は第一横搬送装置40Aのモータ45および第二横搬送装置40Bのモータ45に接続され、これらのモータの回転角度に係る情報(信号)を受信することが可能であるとともに、これらのモータに対して所望の回転方向に所望の回転角度だけ回転する旨の指令を信号として送信することが可能である。
制御部61は読み取り・書き込み装置51に接続され、読み取り・書き込み装置51がICタグ17から読み取った情報(栽培ベンチ10に支持されたプランター2により栽培される植物に係る情報)を信号として受信して記憶することが可能であるとともに、読み取り・書き込み装置51に「栽培ベンチ10に支持されたプランター2により栽培される植物に係る情報」および当該情報をICタグ17に書き込む(記憶させる)旨の指令を信号として送信することが可能である。
制御部61は防除装置52、薬液供給装置53および水供給装置54(厳密には、これらの装置の電磁バルブ)に接続され、これらの動作を指令する信号を送信する(これらの電磁バルブのソレノイドに通電する)ことが可能である。
制御部61は温度計55・56に接続され、これらのセンサにより検知される周囲の気温に係る情報(信号)を受信することが可能である。
制御部61は照度計57・58に接続され、これらのセンサにより検知される光の照度に係る情報(信号)を受信することが可能である。
本実施形態では制御部61をインターネット等の電気通信回線を通じて他のコンピュータ等に接続することが可能であり、他のコンピュータ等の間で相互に情報を送受信することが可能である。
【0054】
入力部62は制御部61に接続され、作業者が操作することにより移動栽培装置1による各種作業に係る種々のデータ、指示等を制御部61に入力する。表示部63は作業者が入力部62を用いて制御部61に入力した内容、移動栽培装置1の動作状況、制御部61に記憶された各種情報(読み取り・書き込み装置51から受信した各プランター2の植物に係る情報を含む)等を表示する。本実施形態ではタッチパネルを用いることにより入力部62および表示部63が一体化されているが、入力部62および表示部63を別体としても良い。この場合、入力部62は例えばキーボード、マウス、ボタン、スイッチ等により構成され、表示部63は例えばモニター、液晶ディスプレイ等により構成される。
出力部64は制御部61に接続され、読み取り・書き込み装置51から受信した各プランター2の植物に係る情報を所定の用紙に印刷する。
【0055】
本実施形態では第一横搬送装置40Aの前方のスペースが作業者の作業スペースとして設定される。作業者は、当該スペースにおいて種々の作業(例えば、植物から収穫物を収穫する作業、雑草を除去する作業、植物の不要部分を切除する作業、プランター2の入れ替え作業等)を行う。
本実施形態では作業者の作業スペースに隣接する位置に制御ユニット60が配置されているので、作業者は移動栽培装置1の操作を行うために作業スペースから離れて長い距離を移動する必要がなく、作業性に優れる。特に、出力部64が作業スペースに隣接する位置に配置されることにより、作業者は作業スペースから移動せずに植物から収穫物を収穫する作業および収穫物を梱包する作業を一連の作業として行うことが可能である。
本実施形態では防除装置52および薬液供給装置53が移動栽培装置1の搬送経路において作業スペースから最も離れた位置(第二横搬送装置40Bに沿った位置)に配置されているため、防除剤および薬液が作業者に付着することを防止する観点から優れている。
【0056】
以下では、制御部61による移動栽培装置1の動作制御について説明する。
制御部61は、予めプランター2毎、あるいは植物の品種毎に、植物に関する栽培条件(例えば、栽培開始日、防除条件(防除剤の散布量および散布頻度)、薬液供給条件(薬液の供給量および供給頻度)、水供給条件(水の供給量および供給頻度)、作業スペースにおいて施される作業の内容およびその頻度、気温条件、日照条件等)を記憶している。
制御部61は、上記栽培条件、栽培ベンチ10に設けられたICタグ17から読み取り・書き込み装置51を経て受信した植物に係る情報、温度計55・56により検知された気温に係る情報、および照度計57・58により検知された光の照度に係る情報に基づいて、移動栽培装置1の搬送装置、読み取り・書き込み装置51、防除装置52、薬液供給装置53および水供給装置54の動作を制御する。
【0057】
以下では、制御部61による第一縦搬送装置20Aの動作制御の詳細について説明する。
なお、制御部61による第二縦搬送装置20Bの動作制御については、これから説明する第一縦搬送装置20Aの動作制御と同様であるため説明を省略する。
【0058】
第一縦搬送装置20Aがプランター2を支持する栽培ベンチ10を搬送経路の正方向(本実施形態の第一縦搬送装置20Aの場合、前方)に搬送する場合、制御部61は第一縦搬送装置20Aの各部を以下の(1−1)〜(1−4)の手順で動作させる。
なお、以下では説明の便宜上、シリンダロッド26bが「半ストローク位置」に配置され、かつ係止突起23・23・・・が「退避位置」に配置されている状態を「初期状態(図10の(a)および図7の(b)参照)」とする。
【0059】
(1−1)制御部61は主移動用バルブ31のソレノイド31bに信号を送信する(通電する)。ソレノイド31bに通電されたとき、バルブスプール31aは中立位置から伸長位置に移動し、シリンダロッド26bがシリンダ本体26aから突出し、全ストローク位置まで移動する(図10の(b)参照)。制御部61はシリンダロッド26bの位置を検出するセンサからシリンダロッド26bが全ストローク位置に到達したことを示す信号を受信した時点でソレノイド31bへの信号の送信を停止する(通電を停止する)(図10の(c)参照)。その結果、一対のロッド21・21は後方に移動する。
【0060】
(1−2)制御部61は回転用バルブ33のソレノイド33cに信号を送信する(通電する)。ソレノイド33cに通電されたとき、バルブスプール33aは中立位置から収縮位置に移動し、シリンダロッド29bがシリンダ本体29aに没入する。制御部61はシリンダロッド29aの位置を検出するセンサからシリンダロッド29aが原点位置に到達したことを示す信号を受信した時点でソレノイド33cへの信号の送信を停止する(通電を停止する)。その結果、一対のロッド21・21は回転し、係止突起23・23・・・は「係止位置」に配置される(図7の(a)参照)。
【0061】
(1−3)制御部61は副移動用バルブ32のソレノイド32cに信号を送信する(通電する)。ソレノイド32cに通電されたとき、バルブスプール32aは中立位置から収縮位置に移動し、シリンダロッド26bがシリンダ本体26aに没入して半ストローク位置まで移動する(図10の(d)参照)。制御部61はシリンダロッド26bの位置を検出するセンサからシリンダロッド26bが半ストローク位置に到達したことを示す信号を受信した時点でソレノイド32cへの信号の送信を停止する(通電を停止する)(図10の(a)参照)。その結果、一対のロッド21・21は前方に移動する。一対のロッド21・21が前方に移動するとき、係止突起23・23・・・は「係止位置」に配置された状態で保持されているので、第一縦搬送装置20A上の栽培ベンチ10・10・・・は係止突起23・23・・・により押されて前方に移動する。また、第二横搬送装置40B上の栽培ベンチ10は第一縦搬送装置20Aに受け渡され、第一縦搬送装置20A上の栽培ベンチ10・10・・・のうち最前の栽培ベンチ10は第一横搬送装置40Aに受け渡される(第一横搬送装置40Aの右半部上に移動する)。
【0062】
(1−4)制御部61は回転用バルブ33のソレノイド33bに信号を送信する(通電する)。ソレノイド33bに通電されたとき、バルブスプール33aは中立位置から伸長位置に移動し、シリンダロッド29bがシリンダ本体29aから突出する。制御部61はシリンダロッド29aの位置を検出するセンサからシリンダロッド29aが全ストローク位置に到達したことを示す信号を受信した時点でソレノイド33bへの信号の送信を停止する(通電を停止する)。その結果、一対のロッド21・21は回転し、係止突起23・23・・・は「退避位置」に配置され、「初期状態」に戻る(図7の(b)参照)。
このように、移動用エアシリンダ25が半ストローク位置と全ストローク位置との間で伸長・収縮する動作と回転用エアシリンダ29が原点位置と全ストローク位置との間で伸長・収縮する動作とを組み合わせることにより、第一横搬送装置40Aは栽培ベンチ10・10・・・を前方に搬送することが可能である。
【0063】
第一縦搬送装置20Aがプランター2を支持する栽培ベンチ10を搬送経路の逆方向(本実施形態の第一縦搬送装置20Aの場合、後方)に搬送する場合、制御部61は第一縦搬送装置20Aの各部を「初期状態(図9の(c)および図7の(b)参照)」から以下の(2−1)〜(2−4)の手順で動作させる。
【0064】
(2−1)制御部61は副移動用バルブ32のソレノイド32cに通電する。その結果、バルブスプール32cは中立位置から収縮位置に移動し、シリンダロッド26bがシリンダ本体26aに没入して原点位置まで移動し(図10の(d)参照)、シリンダロッド27bがシリンダロッド26bに押されてシリンダ本体27aに没入する。制御部61はシリンダロッド26bの位置を検出するセンサからシリンダロッド26bが原点位置に到達したことを示す信号を受信した時点でソレノイド32cへの通電を停止する(図10の(a)参照)。その結果、一対のロッド21・21は前方に移動する。
【0065】
(2−2)制御部61は回転用バルブ33のソレノイド33cに通電する。その結果、バルブスプール33aは中立位置から収縮位置に移動し、シリンダロッド29bがシリンダ本体29aに没入する。制御部61はシリンダロッド29aの位置を検出するセンサからシリンダロッド29aが原点位置に到達したことを示す信号を受信した時点でソレノイド33cへの通電を停止する。その結果、一対のロッド21・21は回転し、係止突起23・23・・・は「係止位置」に配置される(図7の(a)参照)。
【0066】
(2−3)制御部61は副移動用バルブ32のソレノイド32bに通電する。その結果、バルブスプール32aは中立位置から伸長位置に移動し、シリンダロッド27bがシリンダ本体27aから突出し、シリンダロッド26bはシリンダロッド27bに押されてシリンダ本体26aから突出して半ストローク位置まで移動する(図10の(b)参照)。制御部61はシリンダロッド26bの位置を検出するセンサからシリンダロッド26bが半ストローク位置に到達したことを示す信号を受信した時点でソレノイド32bへの通電を停止する(図10の(c)参照)。その結果、一対のロッド21・21は後方に移動する。一対のロッド21・21が後方に移動するとき、係止突起23・23・・・は「係止位置」に配置された状態で保持されているので、第一縦搬送装置20A上の栽培ベンチ10・10・・・は係止突起23・23・・・により押されて後方に移動する。
【0067】
(2−4)制御部61は回転用バルブ33のソレノイド33bに通電し、その後通電を停止する。その結果、一対のロッド21・21は回転し、係止突起23・23・・・は「退避位置」に配置され、「初期状態」に戻る(図7の(b)参照)。
このように、移動用エアシリンダ25が原点位置と半ストローク位置との間で伸長・収縮する動作と回転用エアシリンダ29が原点位置と全ストローク位置との間で伸長・収縮する動作とを組み合わせることにより、第一横搬送装置40Aは栽培ベンチ10・10・・・を後方に搬送することが可能である。
【0068】
なお、図6に示す如く、主移動用バルブ31、副移動用バルブ32および回転用バルブ33のソレノイド群のいずれにも通電されていないとき(バルブスプール31aが収縮位置で保持され、バルブスプール32aが中立位置で保持され、バルブスプール33aが中立位置で保持されているとき)、移動用エアシリンダ25および回転用エアシリンダ29の内部のエアは外部に開放されている。従って、例えば停電等のトラブルにより移動用エアシリンダ25および回転用エアシリンダ29が動作不能となった場合でも、栽培ベンチ10・10・・・(ひいてはプランター2・2・・・)を手動で前後方向(縦方向)に移動させることが可能である。なお、主移動用バルブ31、副移動用バルブ32および回転用バルブ33とは別途に移動用エアシリンダ25および回転用バルブ33の内部のエアを開放する手動バルブを設けても良い。
【0069】
以下では、制御部61による第一横搬送装置40Aの動作制御の詳細について説明する。
第一横搬送装置40Aがプランター2を支持する栽培ベンチ10を左右方向(横方向)に搬送する場合、制御部61は第一横搬送装置40Aのモータ45に信号を送信し、一対のチェーン41・41を回転させる。その結果、載置板46・46・・・に載置されている栽培ベンチ10は左右方向に移動する。なお、制御部61による第二横搬送装置40Bの動作制御は上記第一横搬送装置40Aの動作制御と同様であるため説明を省略する。
【0070】
以下では制御部61による防除装置52、薬液供給装置53および水供給装置54の動作制御について説明する。
制御部61は、予め記憶している「植物に関する栽培条件」、および読み取り・書き込み装置51から受信した「栽培ベンチ10に支持されたプランター2により栽培される植物に係る情報」に基づき、第二横搬送装置40Bが左右方向(横方向)に搬送する栽培ベンチ10(ひいては、当該栽培ベンチ10が支持するプランター2)に対して防除剤を散布する必要があるか、薬液を供給する必要があるか、および、水を供給する必要があるか、を判定する。制御部61は、対象となる栽培ベンチ10に防除剤を散布する必要があると判定した場合には、栽培ベンチ10が防除位置を通過するときに防除装置52の電磁バルブを開き、栽培ベンチ10に防除剤を散布する。制御部61は、対象となる栽培ベンチ10に薬液を供給する必要があると判定した場合には、栽培ベンチ10が薬液供給位置を通過するときに薬液供給装置53の電磁バルブを開き、栽培ベンチ10に薬液を供給する。制御部61は、対象となる栽培ベンチ10に水を供給する必要があると判定した場合には、栽培ベンチ10が水供給位置を通過するときに水供給装置54の電磁バルブを開き、栽培ベンチ10に水を供給する。このように構成することにより、プランター2・2・・・により栽培される植物に適正に防除剤を散布し、薬液を供給し、水を供給することが可能であり、収穫物の品質向上に寄与する。
本実施形態の場合、制御部61は第二横搬送装置40Bが栽培ベンチ10を左右方向(横方向)に搬送する速度を調整することにより、栽培ベンチ10への防除剤の散布量、薬液の供給量、および水の供給量を調整する。なお、防除装置52の電磁バルブ、薬液供給装置53の電磁バルブおよび水供給装置54の電磁バルブが開度を調整可能なバルブ(調整弁)である場合には、これらの開度を調整することにより栽培ベンチ10への防除剤の散布量、薬液の供給量、および水の供給量を調整しても良い。
【0071】
以下では制御部61によるプランター2の気温および日照量の制御について説明する。
制御部61は、温度計55・56により検知されたプランター2・2・・・の周囲の気温および照度計57・58により検知されたプランター2・2・・・に照射される光の照度に基づき、各プランター2の周囲の気温の推移(例えば、移動平均値等)および日射量を算出する。その結果、プランター2・2・・・の間で周囲の気温および日照量のいずれかについて予め設定された値よりも大きな差がある場合には、これが解消されるように(例えば、比較的気温が低い位置に配置されていたプランター2と比較的気温が高い位置に配置されていたプランター2との間で配置が交換されるように)移動栽培装置1の搬送装置を動作させる。このように構成することにより、移動栽培装置1の搬送経路上において気温あるいは日照量に差がある場合であっても、プランター2・・・の周囲の気温および日照量を均等にことが可能であり、収穫物の品質向上に寄与する。
【0072】
本実施形態では二つの温度計55・56および二つの照度計57・58を具備するが、本発明はこれに限定されない。例えば、温度計および照度計を移動栽培装置1の搬送経路に沿って搬送されるプランター2・2・・・のそれぞれに対応して設けても良い。
温度計および照度計を移動栽培装置1の搬送経路に沿って搬送されるプランター2・2・・・のそれぞれに対応して設ける方法の具体例としては、移動栽培装置1の搬送経路においてプランター2・2・・・が停止する位置ごとに温度計および照度計を配置する方法、各栽培ベンチ10に温度計および照度計を固定し、これらが検知する気温および照度に係る情報を制御部61に無線送信する方法、等が挙げられる。
【符号の説明】
【0073】
1 移動栽培装置、2 プランター、10 栽培ベンチ、11 ロアフレーム、12 アッパーフレーム、13 車輪、15 規制アーム、16 支持アーム、16a・16b・16c 案内溝、20A 第一縦搬送装置、20B 第二縦搬送装置、21 ロッド、22 ロッド本体、23 係止突起、24 アーム、25 移動用エアシリンダ、26 主移動用エアシリンダ、27 副移動用エアシリンダ、29 回転用エアシリンダ、31 主移動用バルブ、32 副移動用バルブ、 33 回転用バルブ、40A 第一横搬送装置、40B 第二横搬送装置、51 読み取り・書き込み装置、52 防除装置、53 薬液供給装置、54 水供給装置、60 制御ユニット、61 制御部、64 出力部
【技術分野】
【0001】
本発明は、横方向に長い形状の複数のプランターを用いて植物を高密度で栽培する技術に関する。
【背景技術】
【0002】
従来、横方向に長い形状の複数のプランターを用いて植物を栽培する技術は公知となっている。例えば、特許文献1および特許文献2に記載の如くである。
また、近年は食物の安全性に対する消費者の意識が高まり、収穫物のトレーサビリティー(収穫物の栽培履歴を正確に記憶し、消費者の求めに応じて当該履歴を提供すること)が求められている。
しかし、特許文献1および特許文献2に記載の技術では、作業者が各プランターにより栽培される植物の栽培履歴を別途記憶する(例えば、用紙に記入する、パソコンのデータベースに手入力する等)必要があり、作業が煩雑である。また、作業者が栽培履歴を別途記憶する際に記入漏れおよび誤記入は許されないため、作業者の負担が大きい。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−78577号公報
【特許文献2】特開平9−56259号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は以上の如き状況に鑑みてなされたものである。
すなわち、本発明が解決しようとする課題は、搬送経路に沿って搬送される各プランターにより栽培される植物に係る情報の管理が容易となり、トレーサビリティーが向上する移動栽培装置を提供すること、である。
【課題を解決するための手段】
【0005】
以下では、上記課題を解決するための手段を説明する。
【0006】
即ち、請求項1においては、縦方向に短く、前記縦方向に垂直な横方向に長い形状を有し、植物を栽培する複数のプランターと、前記複数のプランターをそれぞれ支持し、対応するプランターにおいて栽培される植物に係る情報を記憶するためのICタグが設けられた複数の栽培ベンチと、前記複数のプランターをそれぞれ支持した栽培ベンチを搬送経路に沿って搬送する搬送装置と、前記搬送経路の中途部に設定された読み取り・書き込み位置に配置され、前記読み取り・書き込み位置を通過する栽培ベンチに設けられたICタグから前記植物に係る情報を読み取り、前記ICタグに前記植物に係る情報を書き込む読み取り・書き込み装置と、前記搬送装置の動作を制御し、前記読み取り・書き込み装置が前記ICタグから読み取った前記植物に係る情報を受信して記憶し、前記植物に係る情報を前記読み取り・書き込み装置に送信して前記ICタグに記憶させる制御装置と、を具備する。
【0007】
請求項2においては、前記搬送経路の中途部に設定された防除位置に配置され、前記防除位置を通過する栽培ベンチに支持されたプランターに防除剤を散布する防除装置と、前記搬送経路の中途部に設定された薬液供給位置に配置され、前記薬液供給位置を通過する栽培ベンチに支持されたプランターに薬液を供給する薬液供給装置と、前記搬送経路の中途部に設定された水供給位置に配置され、前記水供給位置を通過する栽培ベンチに支持されたプランターに水を供給する水供給装置と、を具備し、前記制御装置は、前記栽培ベンチに設けられたICタグから前記読み取り・書き込み装置を経て受信した前記植物に係る情報に基づいて、前記搬送装置、前記防除装置、前記薬液供給装置および前記水供給装置の動作を制御する。
【0008】
請求項3においては、前記複数のプランターの周囲の気温を検知する温度計と、前記複数のプランターに照射される光の照度を検知する照度計と、を具備し、前記制御装置は、前記温度計により検知された前記複数のプランターの周囲の気温および前記照度計により検知された前記複数のプランターに照射される光の照度に基づいて、前記搬送装置の動作を制御する。
【0009】
請求項4においては、前記温度計および前記照度計は、前記搬送経路に沿って搬送される複数のプランターのそれぞれに対応して設けられる。
【発明の効果】
【0010】
本発明は、搬送経路に沿って搬送される各プランターにより栽培される植物に係る情報の管理が容易となり、トレーサビリティーが向上する、という効果を奏する。
【図面の簡単な説明】
【0011】
【図1】本発明に係る移動栽培装置の実施の一形態を示す平面模式図。
【図2】(a)プランターを示す斜視図、(b)栽培ベンチを示す斜視図。
【図3】プランターが載置された栽培ベンチを示す斜視図。
【図4】(a)栽培ベンチの要部斜視図、(b)栽培ベンチの要部平面図。
【図5】第一縦搬送装置を示す要部斜視図。
【図6】移動用エアシリンダおよび回転用エアシリンダの空圧回路を示す図。
【図7】(a)係止突起が係止位置に配置されているときの一対のロッドおよび回転用エアシリンダを示す正面図、(b)係止突起が退避位置に配置されているときの一対のロッドおよび回転用エアシリンダを示す正面図。
【図8】本発明に係る移動栽培装置の実施の一形態を示す要部右側面図。
【図9】原点位置と半ストローク位置との間における移動用エアシリンダの伸長・収縮動作を示す模式図。
【図10】半ストローク位置と全ストローク位置との間における移動用エアシリンダの伸長・収縮動作を示す模式図。
【図11】ロッドの別実施形態を示す要部拡大図。
【発明を実施するための形態】
【0012】
以下では、図面を参照しつつ、本発明に係る移動栽培装置の実施の一形態である移動栽培装置1について説明する。図1に示す如く、移動栽培装置1は複数のプランター2・2・・・、複数の栽培ベンチ10・10・・・、第一縦搬送装置20A、第二縦搬送装置20B、第一横搬送装置40A、第二横搬送装置40B、読み取り・書き込み装置51、防除装置52、薬液供給装置53、水供給装置54、温度計55・56、照度計57・58および制御ユニット60を具備する。
【0013】
本実施形態では重力が作用する方向に基づいて上下方向が定められ、上下方向に垂直な方向として前後方向が定められ、上下方向および前後方向に垂直な方向として左右方向が定められる(図1参照)。以下では便宜上、前後方向を「縦方向」、左右方向を「横方向」と定め、これらの方向を用いて説明する。なお、本実施形態では縦方向および横方向がいずれも水平面に対して平行(上下方向に対して垂直)であるが、本発明はこれに限定されず、植物の栽培に支障をきたさない限度において、縦方向および横方向が水平面に対して多少傾斜していても(水平面に対して平行でなくても)良い。
【0014】
プランター2は植物を栽培するための容器である。図2の(a)に示す如く、プランター2の外形は縦方向に短く、横方向に長い形状を有する。より詳細には、プランター2の外形は概ねその上面に比べて下面の縦方向および横方向における長さが小さい四角錐台形状であり、プランター2の内部には植物およびこれを栽培するための土等を収容する空間が形成される。プランター2の上面は大きく開口し、プランター2の下面には余剰の水および薬液を外部に排出するための排出孔(不図示)が形成される。また、プランター2の上面の前端部および後端部にはそれぞれ係止片2a・2aが形成される。
なお、本実施形態のプランター2はイチゴを栽培する用途に用いられるが、本発明に係る移動栽培装置は他の種々の植物を栽培する用途に適用することが可能である。
【0015】
栽培ベンチ10は、プランター2を支持し、移動栽培装置1の搬送装置(第一縦搬送装置20A、第二縦搬送装置20B、第一横搬送装置40Aおよび第二横搬送装置40B)により搬送されるものである。
図2の(b)に示す如く、栽培ベンチ10はロアフレーム11、一対のアッパーフレーム12・12、八つの車輪13・13・・・、受け樋14、一対の規制アーム15・15、四つの支持アーム16・16・16・16およびICタグ17を備える。
【0016】
ロアフレーム11および一対のアッパーフレーム12・12は本発明に係るベンチフレームの実施の一形態であり、栽培ベンチ10の主たる構造体を成す。本実施形態のロアフレーム11は角パイプを平面視矩形の枠状に組み合わせたものである。本実施形態の一対のアッパーフレーム12・12はそれぞれ、その長手方向が左右方向に平行な長い丸パイプ、および当該丸パイプに一端部(上端部)が固定されるとともに他端部(下端部)が下方に延びた四本の短い丸パイプを有する。一対のアッパーフレーム12・12はそれぞれロアフレーム11の前端部および後端部に設けられる。図3に示す如く、プランター2がロアフレーム11の上面において一対のアッパーフレーム12・12で挟まれる部分に載置されたとき、プランター2の係止片2a・2aは一対のアッパーフレーム12・12に係止される。このように、プランター2は栽培ベンチ10に支持され、左右横方向から引き出したり、取り出したりすることができ、プランター2の入れ替えが容易にできる。
車輪13・13・・・はロアフレーム11の下方に設けられ、ロアフレーム11および一対のアッパーフレーム12・12を支持する。車輪13・13・・・は前後方向に回転可能である。ただし、移動が容易にできるようにキャスター輪で構成することもできる。
受け樋14はプランター2の下面に形成された排出孔から排出された余剰の水および薬液を受け止める部材である。本実施形態の受け樋14は金属板を適宜折り曲げることにより製造され、左右方向に長い矩形状の底板、および当該底板の前端部および後端部から上方に延びる左右方向に長い矩形状の一対の壁板を有する。受け樋14の上面および左端面は開口し、受け樋14の右端面は別の板材により閉塞される。受け樋14はロアフレーム11の上面の前後方向における略中央部に固定される。プランター2が栽培ベンチ10に支持されたとき、受け樋14はプランター2の下面(ひいては、プランター2の下面に形成された排出孔)の下方に配置される。
【0017】
一対の規制アーム15・15は本発明に係る一対の規制部材の実施の一形態である。規制アーム15・15はいずれも角棒状の部材であり、その一端部(基端部)はそれぞれ前側のアッパーフレーム12の左右端部に固定され、他端部(先端部)は前側のアッパーフレーム12よりも前方に突出する。従って、プランター2がロアフレーム11の上面に載置されたとき、一対の規制アーム15・15の基端部はプランター2の上面開口部の左右端部に配置され、一対の規制アーム15・15の先端部は前方に突出する。よって、左右方向において栽培ベンチ10・10が隣り合う場合、規制アーム15・15同士が当接することになり、プランター2や植物が損傷することを防止できる。また、一対の規制アーム15・15にはそれぞれ左右の側面を貫通する固定孔15a・15b・15cが形成される(図4の(a)参照)。
【0018】
支持アーム16・16・16・16は本発明に係る支持部材の実施の一形態である。本実施形態の支持アーム16・16・16・16はいずれも樹脂成型品であり、上下方向に延び、そこから屈曲して前方に延びた形状を有する。支持アーム16・16・16・16の基端部はそれぞれ前側のアッパーフレーム12を構成する四つの短い丸パイプに固定される。従って、プランター2がアッパーフレーム12の上面に載置されたとき、支持アーム16・16・16・16の基端部はプランター2の上面開口部の左右方向(横方向)における中途部に配置されるとともに支持アーム16・16・16・16の先端部(前後方向に延びた部分)は前方(縦方向)に突出する。支持アーム16・16・16・16の上面は前方に向かって緩やかに下方に傾斜する曲面を成す。支持アーム16・16・16・16の上面にはそれぞれ支持アーム16の左右側面まで切り通された案内溝16a・16b・16cが形成される(図4の(a)参照)。
【0019】
一対の規制アーム15・15および支持アーム16・16・16・16は、「プランター2により栽培される植物においてプランター2の外部まで伸長した部分」を下方から支持することにより当該部分を保護する保護部材を、栽培ベンチ10に支持されたプランター2の前方に配置するための部材である。本実施形態の保護部材は三本の線材(紐、ワイヤー等、線状の部材)である。これら三本の線材の一端部にそれぞれ固定孔15a・15b・15cよりも大きい結び目を形成し、これら三本の線材の他端部をそれぞれ一対の規制アーム15・15の固定孔15a・15b・15cに通し、これら三本の線材の他端部に固定孔15a・15b・15cよりも大きい結び目を形成する、という一連の作業により、これら三本の線材の両端部は一対の規制アーム15・15に固定され、一対の規制アーム15・15の間に張られる。これら三本の線材が一対の規制アーム15・15の間に張られたとき、これら三本の線材の中途部はそれぞれ支持アーム16・16・16・16の案内溝16a・16b・16cに嵌合し、支持アーム16・16・16・16により下方から支持される。このように、これら三本の線材の中途部がそれぞれ支持アーム16・16・16・16の案内溝16a・16b・16cに嵌合することにより、三本の線材がその上方に載る植物の重量により下方に撓んだり、前後方向(縦方向)にずれたりすることを防止することが可能である。
なお、本実施形態では保護部材が三本の線材の場合について説明したが、本発明に係る保護部材はこれに限定されず、例えば金属あるいは合成繊維からなるネットやシート等でも良い。
【0020】
図4の(b)に示す如く、一対の規制アーム15・15の前後方向(縦方向)における突出量L1は、支持アーム16・16・16・16の前後方向(縦方向)における突出量L2よりも大きい(L1>L2)。なお、これらの突出量の差分(=L1−L2)はプランター2により栽培される植物、特に当該植物から収穫される果実等の収穫物の大きさに基づいて定められる。このように構成することにより、前後方向(縦方向)において隣り合う栽培ベンチ10・10が互いに接近したとき、一方の(本実施形態の場合、後側の)栽培ベンチ10における一対の規制アーム15・15の前端部は、他方の(本実施形態の場合、前側の)栽培ベンチ10における後側のアッパーフレーム12(より厳密には、後側のアッパーフレーム12を構成する長い丸パイプの左右両端部)に当接する。従って、前後方向において隣り合う栽培ベンチ10・10がそれ以上に接近することはない。
また、一方の栽培ベンチ10における一対の規制アーム15・15の前端部が他方の栽培ベンチ10に当接したとき、一方の栽培ベンチ10における支持アーム16・16・16・16の前端部と他方の栽培ベンチ10との間には、一対の規制アーム15・15の前後方向における突出量L1と支持アーム16・16・16・16の前後方向における突出量L2との差分(=L1−L2)だけ隙間が形成される。従って、一方の栽培ベンチ10に対応するプランター2により栽培される植物において支持アーム16・16・16・16の前端部よりも前方まで伸長した部分が当該隙間に収まるので、当該部分が隣り合う栽培ベンチ10・10に挟まれて損傷することを防止することが可能である。
【0021】
ICタグ17はロアフレーム11の前端部かつ左右方向における略中央部となる位置に設けられる。ICタグ17は対応するプランター2(ICタグ17が設けられた栽培ベンチ10に支持されるプランター2)により栽培される植物に係る情報を記憶する(読み書きできる)。このように、ICタグ17を用いることによりトレーサビリティーが向上する。
ここで、ICタグ17が記憶する「対応するプランター2により栽培される植物に係る情報」の具体例としては、プランター2により栽培される植物のロット番号(植物を特定するための番号)、品種、栽培開始日(播種や移植等)、植密度、開花日、収穫日、収穫量、品質、後述する防除作業の内容(防除剤の種類、散布量等)および日時、後述する薬液供給作業の内容(薬液の種類、供給量等)および日時、後述する水供給作業の内容(水の供給量等)および日時、その他植物に対して施された各種作業(摘心、誘引、摘果等)の履歴、後述する照度の推移(日照量)、後述する気温の推移、1日当たりのローテーション数等が挙げられる。
【0022】
第一縦搬送装置20A、第二縦搬送装置20B、第一横搬送装置40Aおよび第二横搬送装置40Bは本発明に係る搬送装置の実施の一形態であり、それぞれプランター2を支持した複数の栽培ベンチ10・10・・・を搬送する。
図1に示す如く、第一縦搬送装置20Aおよび第二縦搬送装置20Bは左右方向(横方向)に並べて配置され、栽培ベンチ10・10・・・(ひいては、これらに支持されるプランター2・2・・・)を前後方向(縦方向)に搬送する。第一横搬送装置40Aおよび第二横搬送装置40Bは栽培ベンチ10・10・・・(プランター2・2・・・)を左右方向(横方向)に搬送する。
【0023】
第一横搬送装置40Aの右半部は第一縦搬送装置20Aの前端部の前方に配置され、第一横搬送装置40Aの左半部は第二縦搬送装置20Bの前端部の前方に配置される。
第二横搬送装置40Bの右半部は第一縦搬送装置20Aの後端部の後方に配置され、第二横搬送装置40Bの左半部は第二縦搬送装置20Bの後端部の後方に配置される。
第一横搬送装置40Aおよび第二横搬送装置40Bはいずれも、栽培ベンチ10・10・・・(プランター2・2・・・)を第一縦搬送装置20Aおよび第二縦搬送装置20Bとの間で受け渡すことが可能である。
従って、移動栽培装置1は、第一縦搬送装置20Aから第一横搬送装置40A、第二縦搬送装置20Bおよび第二横搬送装置40Bを経て第一縦搬送装置20Aに戻る無端状(リング状)の搬送経路に沿って栽培ベンチ10・10・・・(プランター2・2・・・)を搬送することが可能である。なお、本実施形態の移動栽培装置1は、栽培ベンチ10・10・・・(プランター2・2・・・)を搬送経路に沿って平面視(図1参照)で反時計回りに搬送することおよび時計回りに搬送することが可能である。
以下では便宜上、平面視反時計回りに搬送する場合の搬送方向を「正方向」、平面視時計回りに搬送する場合の搬送方向を「逆方向」と定義し、これらの方向を用いて説明する。
【0024】
本実施形態では第一縦搬送装置20Aおよび第二縦搬送装置20Bの基本的な構造は同じである(ただし、平面視で互いに180°回転した向きで配置される)ことから、以下では第一縦搬送装置20Aについて説明し、第二縦搬送装置20Bの説明を省略する。
図1に示す如く、第一縦搬送装置20Aは四つのレール35・35・35・35、シリンダブラケット28、一対のロッド21・21、移動用エアシリンダ25、回転用エアシリンダ29、バルブユニット30、エアコンプレッサ34およびこれらの部材を支持するフレーム(不図示)を備える。
【0025】
レール35・35・35・35は、栽培ベンチ10・10・・・が第一縦搬送装置20Aにより搬送されるときに車輪13・13・・・が走行する経路を成す部材である。
本実施形態のレール35・35・35・35は前後方向(縦方向)に長い金属板を折り曲げ、前後方向(縦方向)から見て概ね上方に開口するV字形に成形したものである。このような簡単な構成のレール35は安価で容易に得ることができ、車輪13が走行時に外れることがなく、栽培ベンチ10を容易に案内することができる。レール35・35・35・35は左右方向(横方向)に間隔を空けて並べられ、第一縦搬送装置20Aのフレームに固定される。栽培ベンチ10が第一縦搬送装置20Aによって前後方向(縦方向)に搬送されるとき、栽培ベンチ10の車輪13・13・・・はレール35・35・35・35に嵌合しつつレール35・35・35・35の長手方向に転がる。
【0026】
図1および図5に示す如く、一対のロッド21・21はレール35・35・35・35のうち左端から二番目のレール35と左端から三番目のレール35とで挟まれる位置に配置され、互いに左右方向に並べられる。一対のロッド21・21は互いに左右対称であることから、以下では一方のロッド21について説明し、他方については説明を省略する。
【0027】
ロッド21はロッド本体22、複数の係止突起23・23・・・およびアーム24を有する。本実施形態のロッド本体22は金属製の丸パイプであり、ロッド本体22の長手方向が前後方向(縦方向)に平行に配置され、かつ前後方向に移動可能に第一縦搬送装置20Aのフレームに支持される。複数の係止突起23・23・・・は前後方向に所定の間隔を空けて並べられ、ロッド本体22(の外周面)に固定される。複数の係止突起23・23・・・の前後方向の間隔(所定の間隔)は栽培ベンチ10のロアフレーム11の前後方向の長さよりも長い間隔に設定される。ロッド本体22に固定された係止突起23・23・・・はロッド本体22の半径方向(ロッド本体22の長手方向に垂直な方向)に突出する。アーム24は棒状の部材であり、アーム24の一端部がロッド本体22に固定され、アーム24の他端部はロッド本体22の半径方向に突出する。
【0028】
なお、図11に示す如く、ロッド本体22は複数のロッド片22a・22a・・・で構成し、ロッド片22a・22aの端部に連結部材22bを差し込み、ロッド片22a・22aと連結部材22bとをボルト22c・22c・・・で締結することによりロッド片22a・22aを長手方向に連結しても良い。このように構成することにより、移動栽培装置1が設置される場所の広さに応じて第一縦搬送装置20Aおよび第二縦搬送装置20Bの縦方向の長さを容易に変更することが可能である。
【0029】
図5に示す如く、シリンダブラケット28は固定部材28a、一対のスライドレール28b・28bおよびスライド部材28cを有する。
固定部材28aはフレーム(不図示)に固定される。一対のスライドレール28b・28bは丸棒状の部材であり、互いに左右方向(横方向)に並んで配置され、これらの両端部は固定部材28aに固定される。スライドレール28b・28bの両端部が固定部材28aに固定されたとき、スライドレール28b・28bの長手方向は前後方向に平行となる。スライド部材28cは一対のスライドレール28b・28bに支持される。スライド部材28cはスライドレール28b・28bの長手方向(前後方向)に移動可能である。
【0030】
図5に示す如く、移動用エアシリンダ25は主移動用エアシリンダ26および副移動用エアシリンダ27を有する。図6に示す如く、主移動用エアシリンダ26はシリンダ本体26a、シリンダロッド26bおよびピストン26cを有する。シリンダ本体26aは内部に空間が形成された円筒状の部材である。シリンダロッド26bは棒状の部材であり、その中途部がシリンダ本体26aの一端部に気密的かつ長手方向に移動可能に支持される。ピストン26cはシリンダ本体26aの内部に収容され、シリンダ本体26aの内周面に気密的かつ長手方向に移動可能に当接し、シリンダロッド26bの一端部(シリンダ本体26aの内部に収容されている方の端部)に固定される。
図6に示す如く、副移動用エアシリンダ27はシリンダ本体27a、シリンダロッド27bおよびピストン27cを有する。シリンダ本体27aは内部に空間が形成された円筒状の部材である。シリンダ本体27aの一端部はシリンダ本体26aの他端部に固定される。シリンダロッド27bは棒状の部材であり、その中途部がシリンダ本体27aの一端部およびシリンダ本体26aの他端部に気密的かつ長手方向に移動可能に支持される。従って、シリンダロッド27bの一端部はシリンダ本体27aの内部の空間に収容される。また、シリンダロッド27bの他端部はシリンダ本体26aの内部の空間に収容され、ピストン26cに当接可能である。ピストン27cはシリンダ本体27aの内部に収容され、シリンダ本体27aの内周面に気密的かつ長手方向に移動可能に当接し、シリンダロッド27bの一端部に固定される。なお、本実施形態ではシリンダ本体27aの一端部にシリンダ本体27aの内部空間と外部とを連通する連通孔が形成される。
【0031】
図5に示す如く、副移動用エアシリンダ27のシリンダ本体27aの他端部、すなわち移動用エアシリンダ25の基端部は固定部材28aに固定される。移動用エアシリンダ25の基端部が固定部材28aに固定されたとき、シリンダロッド26bの長手方向は前後方向(縦方向)に平行となり、シリンダロッド26bの他端部(シリンダ本体26aの外部に突出している方の端部)は後方を向く。また、シリンダロッド26bの他端部はスライド部材28cに固定される。一対のロッド21・21の中途部は、スライド部材28cに対して長手方向の軸中心に回転可能かつ前後方向(縦方向)に相対移動不能に支持される。従って、移動用エアシリンダ25が伸長したときにはスライド部材28cおよび一対のロッド21・21は後方に移動し、移動用エアシリンダ25が収縮したときにはスライド部材28cおよび一対のロッド21・21は前方に移動する。
【0032】
図6に示す如く、シリンダロッド27bが最大限にシリンダ本体27aに没入し、かつシリンダロッド26bが最大限に(ピストン26cがシリンダロッド27bに当接するまで)没入しているとき、シリンダロッド26bがシリンダ本体26aの外部に突出している長さ(シリンダロッド26bの突出量)は最小となる。以下、このときのシリンダロッド26bの位置を「原点位置」という。シリンダロッド27bがシリンダ本体27aから最大限に突出し、かつピストン26cがシリンダロッド27bに当接するまでシリンダロッド26bが没入しているとき、シリンダロッド26bがシリンダ本体26aの外部に突出している長さ(シリンダロッド26bの突出量)はシリンダロッド26bの長さの概ね半分となる。以下、このときのシリンダロッド26bの位置を「半ストローク位置」という。シリンダロッド26bが最大限に突出しているとき、シリンダロッド26bがシリンダ本体26aの外部に突出している長さ(シリンダロッド26bの突出量)は最大となる。このときのシリンダロッド26bの位置を「全ストローク位置」という。このように、主移動用エアシリンダ26および副移動用エアシリンダ27は互いに直列的に連結され、それぞれ伸長・収縮することが可能である。また、主移動用エアシリンダ26および副移動用エアシリンダ27の伸長・収縮の組み合わせにより、シリンダロッド26bの位置を原点位置、半ストローク位置および全ストローク位置のいずれかに多段的に変更すること(一対のロッド21・21を前後方向(縦方向)に多段階に移動させること)が可能である。
【0033】
図6に示す如く、回転用エアシリンダ29はシリンダ本体29a、シリンダロッド29bおよびピストン29cを有する。シリンダ本体29aは内部に空間が形成された円筒状の部材である。シリンダロッド29bは棒状の部材であり、その中途部がシリンダ本体29aの一端部に気密的かつ長手方向に移動可能に支持される。ピストン29cはシリンダ本体29aの内部に収容され、シリンダ本体29aの内周面に気密的かつ長手方向に移動可能に当接し、シリンダロッド29bの一端部(シリンダ本体29aの内部に収容されている方の端部)に固定される。図5に示す如く、回転用エアシリンダ29の基端部(シリンダ本体29aの他端部)は右側のロッド21におけるアーム24の他端部に回動可能に連結され、回転用エアシリンダ29の先端部(シリンダロッド29bの他端部)は左側のロッド21におけるアーム24の他端部に回動可能に連結される。
【0034】
図7の(a)に示す如く、回転用エアシリンダ29が収縮しているとき、一対のロッド21・21の係止突起23・23・・・は一対のロッド21・21の外周面から概ね上方に突出する位置に配置される。以下、回転用エアシリンダ29が収縮しているときの係止突起23・23・・・の位置を「係止位置」という。
回転用エアシリンダ29が収縮した状態(図7の(a)に示す状態)から伸長したとき、一対のロッド21・21は係止突起23・23・・・が内側に向かって傾倒する方向に軸回転する。より詳細には、右側のロッド21が長手方向の軸を中心として正面視で時計回りに回動し、左側のロッド21が長手方向の軸を中心として正面視で反時計回りに回動する。その結果、図7の(b)に示す如く、回転用エアシリンダ29が伸長しているとき、右側のロッド21の係止突起23・23・・・は右側のロッド21の外周面から概ね左側方に突出する位置に配置され、左側のロッド21の係止突起23・23・・・は左側のロッド21の外周面から概ね右側方に突出する位置に配置される。回転用エアシリンダ29が伸長しているときの係止突起23・23・・・の位置を「退避位置」という。
【0035】
図7の(a)および図8に示す如く、係止突起23・23・・・が「係止位置」に配置されているとき、係止突起23・23・・・の先端部(ロッド21・21の外周面から突出している方の端部)は、車輪13・13・・・がレール35・35・・・に嵌合した状態における栽培ベンチ10のロアフレーム11の下面よりも上方に配置される。従って、係止突起23・23・・・が「係止位置」に配置された状態を保持しつつ一対のロッド21・21が前後方向(縦方向)に移動することにより、栽培ベンチ10を前後方向(縦方向)に移動させる(搬送する)ことが可能である。より詳細には、係止突起23・23・・・が「係止位置」に配置された状態を保持しつつ一対のロッド21・21が前方に移動したとき、係止突起23・23・・・が栽培ベンチ10のロアフレーム11の後面に当接し、栽培ベンチ10が係止突起23・23・・・に押されて前方に移動する。また、係止突起23・23・・・が「係止位置」に配置された状態を保持しつつ一対のロッド21・21が後方に移動したとき、係止突起23・23・・・が栽培ベンチ10のロアフレーム11の前面に当接し、栽培ベンチ10が係止突起23・23・・・に押されて後方に移動する。
【0036】
また、図7の(b)に示す如く、係止突起23・23・・・が「退避位置」に配置されているとき、係止突起23・23・・・の先端部(ロッド21・21の外周面から突出している端部)は、車輪13・13・・・がレール35・35・・・に嵌合した状態における栽培ベンチ10のロアフレーム11の下面よりも下方に配置される。従って、係止突起23・23・・・が「退避位置」に配置された状態を保持しつつ一対のロッド21・21が前後方向(縦方向)に移動したとき、係止突起23・23・・・はロアフレーム11、ひいては栽培ベンチ10に当接しない(干渉しない)ので、栽培ベンチ10は前後方向に移動しない。
【0037】
図6に示す如く、バルブユニット30は主移動用バルブ31、副移動用バルブ32、回転用バルブ33およびこれらを収容する本体(不図示)を有する。
【0038】
主移動用バルブ31はバルブスプール31aおよびソレノイド31bを有する。バルブスプール31aはバルブユニット30の本体に形成された空間に収容されつつ、伸長位置および収縮位置のいずれかの位置に移動することが可能(摺動可能)である。ソレノイド31bはバルブスプール31aを収縮位置から伸長位置に移動させるためのソレノイドである。主移動用バルブ31はシリンダ本体26aの他端部に接続される。
ソレノイド31bに通電しているとき、バルブスプール31aは収縮位置から伸長位置に移動し、伸長位置で保持される。ソレノイド31bに通電していないとき、バルブスプール31aは伸長位置から収縮位置に移動し、収縮位置で保持される。
【0039】
副移動用バルブ32はバルブスプール32a、ソレノイド32bおよびソレノイド32cを有する。バルブスプール32aはバルブユニット30の本体に形成された空間に収容されつつ、中立位置、伸長位置および収縮位置のいずれかの位置に移動することが可能(摺動可能)である。ソレノイド32bはバルブスプール32aを中立位置から伸長位置に移動させるためのソレノイドである。ソレノイド32cはバルブスプール32aを中立位置から収縮位置に移動させるためのソレノイドである。副移動用バルブ32はシリンダ本体26aの一端部およびシリンダ本体27aの他端部に接続される。
主移動用バルブ31および副移動用バルブ32を合わせたものは本発明に係る移動用開放弁の実施の一形態であり、移動用エアシリンダ25、主移動用バルブ31および副移動用バルブ32を合わせたものは本発明に係る移動用アクチュエータの実施の一形態である。
ソレノイド32bに通電し、かつソレノイド32cに通電していないとき、バルブスプール32aは中立位置から伸長位置に移動し、伸長位置で保持される。ソレノイド32cに通電し、かつソレノイド32bに通電していないとき、バルブスプール32aは中立位置から収縮位置に移動し、収縮位置で保持される。ソレノイド32bおよびソレノイド32bの両方に通電していないとき、バルブスプール32aは中立位置で保持される。
【0040】
回転用バルブ33はバルブスプール33a、ソレノイド33bおよびソレノイド33cを有する。バルブスプール33aはバルブユニット30の本体に形成された空間に収容されつつ、中立位置、伸長位置および収縮位置のいずれかの位置に移動することが可能(摺動可能)である。ソレノイド33bはバルブスプール33aを中立位置から伸長位置に移動させるためのソレノイドである。ソレノイド33cはバルブスプール33aを中立位置から収縮位置に移動させるためのソレノイドである。回転用バルブ33はシリンダ本体29aの一端部および他端部に接続される。回転用バルブ33は本発明に係る回転用開放弁の実施の一形態である。また、回転用エアシリンダ29および回転用バルブ33を合わせたものは本発明に係る回転用アクチュエータの実施の一形態である。
ソレノイド33bに通電し、かつソレノイド33cに通電していないとき、バルブスプール33aは中立位置から伸長位置に移動し、伸長位置で保持される。ソレノイド33cに通電し、かつソレノイド33bに通電していないとき、バルブスプール33aは中立位置から収縮位置に移動し、収縮位置で保持される。ソレノイド33bおよびソレノイド33bの両方に通電していないとき、バルブスプール33aは中立位置で保持される。
【0041】
エアコンプレッサ34は主移動用バルブ31、副移動用バルブ32および回転用バルブ33に接続され、これらのバルブを通じて移動用エアシリンダ25および回転用エアシリンダ29に圧縮されたエアを供給する。
【0042】
以下では図1を用いて第一横搬送装置40Aおよび第二横搬送装置40Bについて説明する。第一横搬送装置40Aおよび第二横搬送装置40Bはいずれも複数の栽培ベンチ10・10・・・を搬送面(本実施形態の場合、後述する一対のチェーン41・41の外周面に固定された載置板46・46・・・のうち一対のチェーン41・41の上方に配置されているものの底板の上側の板面)に載置して左右方向(横方向)に搬送するチェーンコンベアである。本実施形態では第一横搬送装置40Aおよび第二横搬送装置40Bの基本的な構造は同じである(ただし、平面視で互いに180°回転した向きで配置される)ことから、以下では第一横搬送装置40Aの詳細について説明し、第二横搬送装置40Bの詳細な説明を省略する。
第一横搬送装置40Aは一対のチェーン41・41、駆動軸42、従動軸43、ハンドル44、モータ45、載置板46・46・・・およびフレーム47を備える。
【0043】
一対のチェーン41・41はいずれも無端状である。駆動軸42および従動軸43はそれぞれフレーム47の左上端部および右上端部に回転可能に軸支される。駆動軸42および従動軸43の中途部にはいずれも間隔を空けて二つのスプロケットが固定される。また、駆動軸42の一端部(前端部)にはさらに別のスプロケットが固定される。一対のチェーン41・41はそれぞれ駆動軸42に固定されたスプロケットおよび従動軸43に固定されたスプロケットに巻回される。ハンドル44は駆動軸42の一端部(前端部)に固定される。作業者がハンドル44を手で回すことにより、駆動軸42、ひいては一対のチェーン41・41を回転させることが可能である。モータ45は電気式のサーボモータであり、駆動軸42、ひいては一対のチェーン41・41を回転駆動するための駆動源を成す。モータ45はフレーム47において駆動軸42の下方となる位置に固定される。モータ45の出力軸にはスプロケットが固定される。モータ45の出力軸に固定されたスプロケットおよび駆動軸42の一端部に固定されたスプロケットにはチェーン(図1において不図示)が巻回され、モータ45の駆動力により、駆動軸42、ひいては一対のチェーン41・41が回転駆動される。載置板46・46・・・は第一縦搬送装置20Aあるいは第二縦搬送装置20Bから受け渡された栽培ベンチ10の車輪13・13・・・を支持する。本実施形態の載置板46・46・・・は上下一対の板面を有する底部、および底部の左右端部から上方に延びた一対のガイド部を有する部材であり、前後方向にやや長い金属板を折り曲げることにより製造される。載置板46・46・・・は間隔を空けて一対のチェーン41・41に固定され、一対のチェーン41・41と一体となって回転する。
図1に示す如く、載置板46・46・・・は第一縦搬送装置20Aの前方に移動したときには第一縦搬送装置20Aのレール35・35・35・35の前方に配置され、第二縦搬送装置20Bの前方に移動したときには第一縦搬送装置20Aのレール35・35・35・35の前方に配置される。栽培ベンチ10の車輪13・13・・・が載置板46・46・・・に支持された状態で一対のチェーン41・41が回転することにより、第一横搬送装置40Aは栽培ベンチ10を左右方向(横方向)に搬送する。
【0044】
図8に示す如く、第一縦搬送装置20Aの一対のロッド21・21は、第一横搬送装置40Aの搬送面(載置板46・46・・・のうち一対のチェーン41・41の上方に配置されているものの底板の上側の板面)よりも上方、かつ第一横搬送装置40Aの搬送面に載置された(車輪13・13・・・が載置板46・46・・・に支持された)栽培ベンチ10のロアフレーム11の下面よりも下方となる高さに配置される。
従って、係止突起23・23・・・が「退避位置」に配置された一対のロッド21・21は、第一横搬送装置40Aの搬送面に載置された栽培ベンチ10および第一横搬送装置40Aに干渉(接触)することなく前後方向(縦方向)に移動することが可能である。
【0045】
図1に示す如く、読み取り・書き込み装置51は移動栽培装置1の搬送経路の中途部、より詳細には第一横搬送装置40Aの右半部に沿った位置に配置される。ここで、「第一横搬送装置40Aの右半部に沿った位置」は本実施形態において予め設定された「読み取り・書き込み位置」に相当する。読み取り・書き込み装置51は「読み取り・書き込み位置」を通過する栽培ベンチ10に設けられたICタグ17から「当該栽培ベンチ10に支持されたプランター2により栽培される植物に係る情報」を読み取り、ICタグ17に「当該栽培ベンチ10に支持されたプランター2により栽培される植物に係る情報」を書き込むことが可能である。
【0046】
防除装置52は移動栽培装置1の搬送経路の中途部、より詳細には第二横搬送装置40Bの左右方向における略中央部に配置される。ここで、「第二横搬送装置40Bの左右方向における略中央部」は本実施形態において予め設定された「防除位置」に相当する。防除装置52は、第二横搬送装置40Bが左右方向(横方向)に搬送することにより「防除位置」を通過する栽培ベンチ10に支持されたプランター2(ひいては、プランター2により栽培される植物)に防除剤(植物の病害および虫害を防止するための薬剤)を散布する。
本実施形態の防除装置52は防除剤を圧送する配管、当該配管に設けられる散布ノズル、当該散布ノズルへの防除剤の供給およびその停止を切り替える電磁バルブを備える。
【0047】
薬液供給装置53は移動栽培装置1の搬送経路の中途部、より詳細には第二横搬送装置40Bの左右方向における略中央部に配置される。ここで、「第二横搬送装置40Bの左右方向における略中央部」は本実施形態において予め設定された「薬液供給位置」に相当する。薬液供給装置53は第二横搬送装置40Bが左右方向(横方向)に搬送することにより「薬液供給位置」を通過する栽培ベンチ10に支持されたプランター2(ひいては、プランター2により栽培される植物)に薬液を供給する。本実施形態の薬液供給装置53は薬液を圧送する配管、当該配管に設けられる薬液供給ノズル、当該薬液供給ノズルへの薬液の供給およびその停止を切り替える電磁バルブを備える。
【0048】
水供給装置54は移動栽培装置1の搬送経路の中途部、より詳細には第二横搬送装置40Bの左右方向における略中央部に配置される。ここで、「第二横搬送装置40Bの左右方向における略中央部」は本実施形態において予め設定された「水供給位置」に相当する。
水供給装置54は第二横搬送装置40Bが左右方向(横方向)に搬送することにより「水供給位置」を通過する栽培ベンチ10に支持されたプランター2(ひいては、プランター2により栽培される植物)に水を供給する(潅水する)。本実施形態の水供給装置54は水を圧送する配管、当該配管に設けられる水供給ノズル、当該水供給ノズルへの水の供給およびその停止を切り替える電磁バルブを備える。
【0049】
温度計55・56はプランター2・2・・・の周囲の雰囲気の温度(気温)を検知する。温度計55は第一縦搬送装置20Aの右側方となる位置に配置され、温度計56は第二縦搬送装置20Bの左側方となる位置に配置される。
本実施形態では温度計55は搬送経路の右半部(第一縦搬送装置20A、第一横搬送装置40Aの右半部および第二横搬送装置40Bの右半部)に配置された栽培ベンチ10・10・・・に支持されるプランター2・2・・・の周囲の気温を検知するものとみなされ、温度計56は搬送経路の左半部(第二縦搬送装置20B、第一横搬送装置40Aの左半部および第二横搬送装置40Bの左半部)に配置された栽培ベンチ10・10・・・に支持されるプランター2・2・・・の周囲の気温を検知するものとみなされる。
【0050】
照度計57・58はプランター2・2・・・に照射される光の照度を検知する。照度計57は第一縦搬送装置20Aの右側方となる位置に配置され、照度計58は第二縦搬送装置20Bの左側方となる位置に配置される。
本実施形態では照度計57は搬送経路の右半部に配置された栽培ベンチ10・10・・・に支持されるプランター2・2・・・に照射される光の照度を検知するものとみなされ、照度計58は搬送経路の左半部に配置された栽培ベンチ10・10・・・に支持されるプランター2・2・・・に照射される光の照度を検知するものとみなされる。
【0051】
制御ユニット60は制御部61、入力部62、表示部63および出力部64を備える。
図1に示す如く、制御ユニット60は第一横搬送装置40Aの右端部の前方となる位置に配置される。
【0052】
制御部61は本発明に係る制御装置の実施の一形態であり、移動栽培装置1の各部(移動栽培装置1の搬送装置、読み取り・書き込み装置51、防除装置52、薬液供給装置53および水供給装置54)の動作を制御する。制御部61は種々のプログラム等を格納し、これらのプログラム等を展開し、これらのプログラム等に従って所定の演算を行い、当該演算の結果等を記憶することができる。本実施形態の制御部61はバスで接続されたCPU、ROM、RAM等を備える。
【0053】
制御部61は第一縦搬送装置20Aのバルブユニット30および第二縦搬送装置20Bのバルブユニット30に接続され、これらのバルブユニット30が有するバルブ群(主移動用バルブ31、副移動用バルブ32、回転用バルブ33)が動作するための信号を送信する(これらのバルブのソレノイドに通電する)ことが可能である。
制御部61は第一縦搬送装置20Aにおけるシリンダロッド26b・27b・29bの位置を検出するセンサ(不図示)および第二縦搬送装置20Bにおけるシリンダロッド26b・27b・29bの位置を検出するセンサ(不図示)に接続され、これらのシリンダロッドの位置に係る情報を受信することが可能である。
制御部61は第一横搬送装置40Aのモータ45および第二横搬送装置40Bのモータ45に接続され、これらのモータの回転角度に係る情報(信号)を受信することが可能であるとともに、これらのモータに対して所望の回転方向に所望の回転角度だけ回転する旨の指令を信号として送信することが可能である。
制御部61は読み取り・書き込み装置51に接続され、読み取り・書き込み装置51がICタグ17から読み取った情報(栽培ベンチ10に支持されたプランター2により栽培される植物に係る情報)を信号として受信して記憶することが可能であるとともに、読み取り・書き込み装置51に「栽培ベンチ10に支持されたプランター2により栽培される植物に係る情報」および当該情報をICタグ17に書き込む(記憶させる)旨の指令を信号として送信することが可能である。
制御部61は防除装置52、薬液供給装置53および水供給装置54(厳密には、これらの装置の電磁バルブ)に接続され、これらの動作を指令する信号を送信する(これらの電磁バルブのソレノイドに通電する)ことが可能である。
制御部61は温度計55・56に接続され、これらのセンサにより検知される周囲の気温に係る情報(信号)を受信することが可能である。
制御部61は照度計57・58に接続され、これらのセンサにより検知される光の照度に係る情報(信号)を受信することが可能である。
本実施形態では制御部61をインターネット等の電気通信回線を通じて他のコンピュータ等に接続することが可能であり、他のコンピュータ等の間で相互に情報を送受信することが可能である。
【0054】
入力部62は制御部61に接続され、作業者が操作することにより移動栽培装置1による各種作業に係る種々のデータ、指示等を制御部61に入力する。表示部63は作業者が入力部62を用いて制御部61に入力した内容、移動栽培装置1の動作状況、制御部61に記憶された各種情報(読み取り・書き込み装置51から受信した各プランター2の植物に係る情報を含む)等を表示する。本実施形態ではタッチパネルを用いることにより入力部62および表示部63が一体化されているが、入力部62および表示部63を別体としても良い。この場合、入力部62は例えばキーボード、マウス、ボタン、スイッチ等により構成され、表示部63は例えばモニター、液晶ディスプレイ等により構成される。
出力部64は制御部61に接続され、読み取り・書き込み装置51から受信した各プランター2の植物に係る情報を所定の用紙に印刷する。
【0055】
本実施形態では第一横搬送装置40Aの前方のスペースが作業者の作業スペースとして設定される。作業者は、当該スペースにおいて種々の作業(例えば、植物から収穫物を収穫する作業、雑草を除去する作業、植物の不要部分を切除する作業、プランター2の入れ替え作業等)を行う。
本実施形態では作業者の作業スペースに隣接する位置に制御ユニット60が配置されているので、作業者は移動栽培装置1の操作を行うために作業スペースから離れて長い距離を移動する必要がなく、作業性に優れる。特に、出力部64が作業スペースに隣接する位置に配置されることにより、作業者は作業スペースから移動せずに植物から収穫物を収穫する作業および収穫物を梱包する作業を一連の作業として行うことが可能である。
本実施形態では防除装置52および薬液供給装置53が移動栽培装置1の搬送経路において作業スペースから最も離れた位置(第二横搬送装置40Bに沿った位置)に配置されているため、防除剤および薬液が作業者に付着することを防止する観点から優れている。
【0056】
以下では、制御部61による移動栽培装置1の動作制御について説明する。
制御部61は、予めプランター2毎、あるいは植物の品種毎に、植物に関する栽培条件(例えば、栽培開始日、防除条件(防除剤の散布量および散布頻度)、薬液供給条件(薬液の供給量および供給頻度)、水供給条件(水の供給量および供給頻度)、作業スペースにおいて施される作業の内容およびその頻度、気温条件、日照条件等)を記憶している。
制御部61は、上記栽培条件、栽培ベンチ10に設けられたICタグ17から読み取り・書き込み装置51を経て受信した植物に係る情報、温度計55・56により検知された気温に係る情報、および照度計57・58により検知された光の照度に係る情報に基づいて、移動栽培装置1の搬送装置、読み取り・書き込み装置51、防除装置52、薬液供給装置53および水供給装置54の動作を制御する。
【0057】
以下では、制御部61による第一縦搬送装置20Aの動作制御の詳細について説明する。
なお、制御部61による第二縦搬送装置20Bの動作制御については、これから説明する第一縦搬送装置20Aの動作制御と同様であるため説明を省略する。
【0058】
第一縦搬送装置20Aがプランター2を支持する栽培ベンチ10を搬送経路の正方向(本実施形態の第一縦搬送装置20Aの場合、前方)に搬送する場合、制御部61は第一縦搬送装置20Aの各部を以下の(1−1)〜(1−4)の手順で動作させる。
なお、以下では説明の便宜上、シリンダロッド26bが「半ストローク位置」に配置され、かつ係止突起23・23・・・が「退避位置」に配置されている状態を「初期状態(図10の(a)および図7の(b)参照)」とする。
【0059】
(1−1)制御部61は主移動用バルブ31のソレノイド31bに信号を送信する(通電する)。ソレノイド31bに通電されたとき、バルブスプール31aは中立位置から伸長位置に移動し、シリンダロッド26bがシリンダ本体26aから突出し、全ストローク位置まで移動する(図10の(b)参照)。制御部61はシリンダロッド26bの位置を検出するセンサからシリンダロッド26bが全ストローク位置に到達したことを示す信号を受信した時点でソレノイド31bへの信号の送信を停止する(通電を停止する)(図10の(c)参照)。その結果、一対のロッド21・21は後方に移動する。
【0060】
(1−2)制御部61は回転用バルブ33のソレノイド33cに信号を送信する(通電する)。ソレノイド33cに通電されたとき、バルブスプール33aは中立位置から収縮位置に移動し、シリンダロッド29bがシリンダ本体29aに没入する。制御部61はシリンダロッド29aの位置を検出するセンサからシリンダロッド29aが原点位置に到達したことを示す信号を受信した時点でソレノイド33cへの信号の送信を停止する(通電を停止する)。その結果、一対のロッド21・21は回転し、係止突起23・23・・・は「係止位置」に配置される(図7の(a)参照)。
【0061】
(1−3)制御部61は副移動用バルブ32のソレノイド32cに信号を送信する(通電する)。ソレノイド32cに通電されたとき、バルブスプール32aは中立位置から収縮位置に移動し、シリンダロッド26bがシリンダ本体26aに没入して半ストローク位置まで移動する(図10の(d)参照)。制御部61はシリンダロッド26bの位置を検出するセンサからシリンダロッド26bが半ストローク位置に到達したことを示す信号を受信した時点でソレノイド32cへの信号の送信を停止する(通電を停止する)(図10の(a)参照)。その結果、一対のロッド21・21は前方に移動する。一対のロッド21・21が前方に移動するとき、係止突起23・23・・・は「係止位置」に配置された状態で保持されているので、第一縦搬送装置20A上の栽培ベンチ10・10・・・は係止突起23・23・・・により押されて前方に移動する。また、第二横搬送装置40B上の栽培ベンチ10は第一縦搬送装置20Aに受け渡され、第一縦搬送装置20A上の栽培ベンチ10・10・・・のうち最前の栽培ベンチ10は第一横搬送装置40Aに受け渡される(第一横搬送装置40Aの右半部上に移動する)。
【0062】
(1−4)制御部61は回転用バルブ33のソレノイド33bに信号を送信する(通電する)。ソレノイド33bに通電されたとき、バルブスプール33aは中立位置から伸長位置に移動し、シリンダロッド29bがシリンダ本体29aから突出する。制御部61はシリンダロッド29aの位置を検出するセンサからシリンダロッド29aが全ストローク位置に到達したことを示す信号を受信した時点でソレノイド33bへの信号の送信を停止する(通電を停止する)。その結果、一対のロッド21・21は回転し、係止突起23・23・・・は「退避位置」に配置され、「初期状態」に戻る(図7の(b)参照)。
このように、移動用エアシリンダ25が半ストローク位置と全ストローク位置との間で伸長・収縮する動作と回転用エアシリンダ29が原点位置と全ストローク位置との間で伸長・収縮する動作とを組み合わせることにより、第一横搬送装置40Aは栽培ベンチ10・10・・・を前方に搬送することが可能である。
【0063】
第一縦搬送装置20Aがプランター2を支持する栽培ベンチ10を搬送経路の逆方向(本実施形態の第一縦搬送装置20Aの場合、後方)に搬送する場合、制御部61は第一縦搬送装置20Aの各部を「初期状態(図9の(c)および図7の(b)参照)」から以下の(2−1)〜(2−4)の手順で動作させる。
【0064】
(2−1)制御部61は副移動用バルブ32のソレノイド32cに通電する。その結果、バルブスプール32cは中立位置から収縮位置に移動し、シリンダロッド26bがシリンダ本体26aに没入して原点位置まで移動し(図10の(d)参照)、シリンダロッド27bがシリンダロッド26bに押されてシリンダ本体27aに没入する。制御部61はシリンダロッド26bの位置を検出するセンサからシリンダロッド26bが原点位置に到達したことを示す信号を受信した時点でソレノイド32cへの通電を停止する(図10の(a)参照)。その結果、一対のロッド21・21は前方に移動する。
【0065】
(2−2)制御部61は回転用バルブ33のソレノイド33cに通電する。その結果、バルブスプール33aは中立位置から収縮位置に移動し、シリンダロッド29bがシリンダ本体29aに没入する。制御部61はシリンダロッド29aの位置を検出するセンサからシリンダロッド29aが原点位置に到達したことを示す信号を受信した時点でソレノイド33cへの通電を停止する。その結果、一対のロッド21・21は回転し、係止突起23・23・・・は「係止位置」に配置される(図7の(a)参照)。
【0066】
(2−3)制御部61は副移動用バルブ32のソレノイド32bに通電する。その結果、バルブスプール32aは中立位置から伸長位置に移動し、シリンダロッド27bがシリンダ本体27aから突出し、シリンダロッド26bはシリンダロッド27bに押されてシリンダ本体26aから突出して半ストローク位置まで移動する(図10の(b)参照)。制御部61はシリンダロッド26bの位置を検出するセンサからシリンダロッド26bが半ストローク位置に到達したことを示す信号を受信した時点でソレノイド32bへの通電を停止する(図10の(c)参照)。その結果、一対のロッド21・21は後方に移動する。一対のロッド21・21が後方に移動するとき、係止突起23・23・・・は「係止位置」に配置された状態で保持されているので、第一縦搬送装置20A上の栽培ベンチ10・10・・・は係止突起23・23・・・により押されて後方に移動する。
【0067】
(2−4)制御部61は回転用バルブ33のソレノイド33bに通電し、その後通電を停止する。その結果、一対のロッド21・21は回転し、係止突起23・23・・・は「退避位置」に配置され、「初期状態」に戻る(図7の(b)参照)。
このように、移動用エアシリンダ25が原点位置と半ストローク位置との間で伸長・収縮する動作と回転用エアシリンダ29が原点位置と全ストローク位置との間で伸長・収縮する動作とを組み合わせることにより、第一横搬送装置40Aは栽培ベンチ10・10・・・を後方に搬送することが可能である。
【0068】
なお、図6に示す如く、主移動用バルブ31、副移動用バルブ32および回転用バルブ33のソレノイド群のいずれにも通電されていないとき(バルブスプール31aが収縮位置で保持され、バルブスプール32aが中立位置で保持され、バルブスプール33aが中立位置で保持されているとき)、移動用エアシリンダ25および回転用エアシリンダ29の内部のエアは外部に開放されている。従って、例えば停電等のトラブルにより移動用エアシリンダ25および回転用エアシリンダ29が動作不能となった場合でも、栽培ベンチ10・10・・・(ひいてはプランター2・2・・・)を手動で前後方向(縦方向)に移動させることが可能である。なお、主移動用バルブ31、副移動用バルブ32および回転用バルブ33とは別途に移動用エアシリンダ25および回転用バルブ33の内部のエアを開放する手動バルブを設けても良い。
【0069】
以下では、制御部61による第一横搬送装置40Aの動作制御の詳細について説明する。
第一横搬送装置40Aがプランター2を支持する栽培ベンチ10を左右方向(横方向)に搬送する場合、制御部61は第一横搬送装置40Aのモータ45に信号を送信し、一対のチェーン41・41を回転させる。その結果、載置板46・46・・・に載置されている栽培ベンチ10は左右方向に移動する。なお、制御部61による第二横搬送装置40Bの動作制御は上記第一横搬送装置40Aの動作制御と同様であるため説明を省略する。
【0070】
以下では制御部61による防除装置52、薬液供給装置53および水供給装置54の動作制御について説明する。
制御部61は、予め記憶している「植物に関する栽培条件」、および読み取り・書き込み装置51から受信した「栽培ベンチ10に支持されたプランター2により栽培される植物に係る情報」に基づき、第二横搬送装置40Bが左右方向(横方向)に搬送する栽培ベンチ10(ひいては、当該栽培ベンチ10が支持するプランター2)に対して防除剤を散布する必要があるか、薬液を供給する必要があるか、および、水を供給する必要があるか、を判定する。制御部61は、対象となる栽培ベンチ10に防除剤を散布する必要があると判定した場合には、栽培ベンチ10が防除位置を通過するときに防除装置52の電磁バルブを開き、栽培ベンチ10に防除剤を散布する。制御部61は、対象となる栽培ベンチ10に薬液を供給する必要があると判定した場合には、栽培ベンチ10が薬液供給位置を通過するときに薬液供給装置53の電磁バルブを開き、栽培ベンチ10に薬液を供給する。制御部61は、対象となる栽培ベンチ10に水を供給する必要があると判定した場合には、栽培ベンチ10が水供給位置を通過するときに水供給装置54の電磁バルブを開き、栽培ベンチ10に水を供給する。このように構成することにより、プランター2・2・・・により栽培される植物に適正に防除剤を散布し、薬液を供給し、水を供給することが可能であり、収穫物の品質向上に寄与する。
本実施形態の場合、制御部61は第二横搬送装置40Bが栽培ベンチ10を左右方向(横方向)に搬送する速度を調整することにより、栽培ベンチ10への防除剤の散布量、薬液の供給量、および水の供給量を調整する。なお、防除装置52の電磁バルブ、薬液供給装置53の電磁バルブおよび水供給装置54の電磁バルブが開度を調整可能なバルブ(調整弁)である場合には、これらの開度を調整することにより栽培ベンチ10への防除剤の散布量、薬液の供給量、および水の供給量を調整しても良い。
【0071】
以下では制御部61によるプランター2の気温および日照量の制御について説明する。
制御部61は、温度計55・56により検知されたプランター2・2・・・の周囲の気温および照度計57・58により検知されたプランター2・2・・・に照射される光の照度に基づき、各プランター2の周囲の気温の推移(例えば、移動平均値等)および日射量を算出する。その結果、プランター2・2・・・の間で周囲の気温および日照量のいずれかについて予め設定された値よりも大きな差がある場合には、これが解消されるように(例えば、比較的気温が低い位置に配置されていたプランター2と比較的気温が高い位置に配置されていたプランター2との間で配置が交換されるように)移動栽培装置1の搬送装置を動作させる。このように構成することにより、移動栽培装置1の搬送経路上において気温あるいは日照量に差がある場合であっても、プランター2・・・の周囲の気温および日照量を均等にことが可能であり、収穫物の品質向上に寄与する。
【0072】
本実施形態では二つの温度計55・56および二つの照度計57・58を具備するが、本発明はこれに限定されない。例えば、温度計および照度計を移動栽培装置1の搬送経路に沿って搬送されるプランター2・2・・・のそれぞれに対応して設けても良い。
温度計および照度計を移動栽培装置1の搬送経路に沿って搬送されるプランター2・2・・・のそれぞれに対応して設ける方法の具体例としては、移動栽培装置1の搬送経路においてプランター2・2・・・が停止する位置ごとに温度計および照度計を配置する方法、各栽培ベンチ10に温度計および照度計を固定し、これらが検知する気温および照度に係る情報を制御部61に無線送信する方法、等が挙げられる。
【符号の説明】
【0073】
1 移動栽培装置、2 プランター、10 栽培ベンチ、11 ロアフレーム、12 アッパーフレーム、13 車輪、15 規制アーム、16 支持アーム、16a・16b・16c 案内溝、20A 第一縦搬送装置、20B 第二縦搬送装置、21 ロッド、22 ロッド本体、23 係止突起、24 アーム、25 移動用エアシリンダ、26 主移動用エアシリンダ、27 副移動用エアシリンダ、29 回転用エアシリンダ、31 主移動用バルブ、32 副移動用バルブ、 33 回転用バルブ、40A 第一横搬送装置、40B 第二横搬送装置、51 読み取り・書き込み装置、52 防除装置、53 薬液供給装置、54 水供給装置、60 制御ユニット、61 制御部、64 出力部
【特許請求の範囲】
【請求項1】
縦方向に短く、前記縦方向に垂直な横方向に長い形状を有し、植物を栽培する複数のプランターと、
前記複数のプランターをそれぞれ支持し、対応するプランターにおいて栽培される植物に係る情報を記憶するためのICタグが設けられた複数の栽培ベンチと、
前記複数のプランターをそれぞれ支持した栽培ベンチを搬送経路に沿って搬送する搬送装置と、
前記搬送経路の中途部に設定された読み取り・書き込み位置に配置され、前記読み取り・書き込み位置を通過する栽培ベンチに設けられたICタグから前記植物に係る情報を読み取り、前記ICタグに前記植物に係る情報を書き込む読み取り・書き込み装置と、
前記搬送装置の動作を制御し、前記読み取り・書き込み装置が前記ICタグから読み取った前記植物に係る情報を受信して記憶し、前記植物に係る情報を前記読み取り・書き込み装置に送信して前記ICタグに記憶させる制御装置と、
を具備する、
移動栽培装置。
【請求項2】
前記搬送経路の中途部に設定された防除位置に配置され、前記防除位置を通過する栽培ベンチに支持されたプランターに防除剤を散布する防除装置と、
前記搬送経路の中途部に設定された薬液供給位置に配置され、前記薬液供給位置を通過する栽培ベンチに支持されたプランターに薬液を供給する薬液供給装置と、
前記搬送経路の中途部に設定された水供給位置に配置され、前記水供給位置を通過する栽培ベンチに支持されたプランターに水を供給する水供給装置と、
を具備し、
前記制御装置は、
前記栽培ベンチに設けられたICタグから前記読み取り・書き込み装置を経て受信した前記植物に係る情報に基づいて、前記搬送装置、前記防除装置、前記薬液供給装置および前記水供給装置の動作を制御する、
請求項1に記載の移動栽培装置。
【請求項3】
前記複数のプランターの周囲の気温を検知する温度計と、
前記複数のプランターに照射される光の照度を検知する照度計と、
を具備し、
前記制御装置は、
前記温度計により検知された前記複数のプランターの周囲の気温および前記照度計により検知された前記複数のプランターに照射される光の照度に基づいて、前記搬送装置の動作を制御する、
請求項2に記載の移動栽培装置。
【請求項4】
前記温度計および前記照度計は、
前記搬送経路に沿って搬送される複数のプランターのそれぞれに対応して設けられる、
請求項3に記載の移動栽培装置。
【請求項1】
縦方向に短く、前記縦方向に垂直な横方向に長い形状を有し、植物を栽培する複数のプランターと、
前記複数のプランターをそれぞれ支持し、対応するプランターにおいて栽培される植物に係る情報を記憶するためのICタグが設けられた複数の栽培ベンチと、
前記複数のプランターをそれぞれ支持した栽培ベンチを搬送経路に沿って搬送する搬送装置と、
前記搬送経路の中途部に設定された読み取り・書き込み位置に配置され、前記読み取り・書き込み位置を通過する栽培ベンチに設けられたICタグから前記植物に係る情報を読み取り、前記ICタグに前記植物に係る情報を書き込む読み取り・書き込み装置と、
前記搬送装置の動作を制御し、前記読み取り・書き込み装置が前記ICタグから読み取った前記植物に係る情報を受信して記憶し、前記植物に係る情報を前記読み取り・書き込み装置に送信して前記ICタグに記憶させる制御装置と、
を具備する、
移動栽培装置。
【請求項2】
前記搬送経路の中途部に設定された防除位置に配置され、前記防除位置を通過する栽培ベンチに支持されたプランターに防除剤を散布する防除装置と、
前記搬送経路の中途部に設定された薬液供給位置に配置され、前記薬液供給位置を通過する栽培ベンチに支持されたプランターに薬液を供給する薬液供給装置と、
前記搬送経路の中途部に設定された水供給位置に配置され、前記水供給位置を通過する栽培ベンチに支持されたプランターに水を供給する水供給装置と、
を具備し、
前記制御装置は、
前記栽培ベンチに設けられたICタグから前記読み取り・書き込み装置を経て受信した前記植物に係る情報に基づいて、前記搬送装置、前記防除装置、前記薬液供給装置および前記水供給装置の動作を制御する、
請求項1に記載の移動栽培装置。
【請求項3】
前記複数のプランターの周囲の気温を検知する温度計と、
前記複数のプランターに照射される光の照度を検知する照度計と、
を具備し、
前記制御装置は、
前記温度計により検知された前記複数のプランターの周囲の気温および前記照度計により検知された前記複数のプランターに照射される光の照度に基づいて、前記搬送装置の動作を制御する、
請求項2に記載の移動栽培装置。
【請求項4】
前記温度計および前記照度計は、
前記搬送経路に沿って搬送される複数のプランターのそれぞれに対応して設けられる、
請求項3に記載の移動栽培装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−94085(P2013−94085A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−237981(P2011−237981)
【出願日】平成23年10月28日(2011.10.28)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月28日(2011.10.28)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
[ Back to top ]