
移動機構及びこれを用いたピックアンドプレース装置
【課題】 構造が非常にシンプルなピックアンドプレース装置等を提供する。
【解決手段】 ピックアンドプレース装置Aは、タイミングプーリ30をX方向に移動さ
せる移動機構1と、タイミングプーリ30に連結され且つアーム52をZ方向に移動可能
な直進アームモジュール機構2とを備えている。移動機構1は、独立して駆動可能なステッピングモータ10a、10bと、タイミングベルト23a、23bが走行可能なように同モータ10a、10bに連結されたベルト・プーリ20a,20bと、タイミングベルト23a、23bとの間に配置され且つ各ベルトが交差するように掛け回されたタイミングプーリ30と、タイミングプーリ30を軸支するとともに直線上に移動自在に案内する軸ガイド部40とを有している。
【解決手段】 ピックアンドプレース装置Aは、タイミングプーリ30をX方向に移動さ
せる移動機構1と、タイミングプーリ30に連結され且つアーム52をZ方向に移動可能
な直進アームモジュール機構2とを備えている。移動機構1は、独立して駆動可能なステッピングモータ10a、10bと、タイミングベルト23a、23bが走行可能なように同モータ10a、10bに連結されたベルト・プーリ20a,20bと、タイミングベルト23a、23bとの間に配置され且つ各ベルトが交差するように掛け回されたタイミングプーリ30と、タイミングプーリ30を軸支するとともに直線上に移動自在に案内する軸ガイド部40とを有している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はワークを移動させる移動機構及びこれを用いたピックアンドプレース装置に関
する。
【背景技術】
【0002】
部品を把持して他の場所へ移動させるピックアンドプレース装置については、様々な分
野で広く使用されており、ワークを把持可能なアームと、カム機構やモータを組み合わせてアームを移動させる移動機構とを有した構成となっているのが一般的である(例えば、特許文献1等)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−152505号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来例による場合、移動機構の部品点数が多くその構造が複雑であ
ることから、小型軽量化、低コスト化及びメンテナンス性の向上を図ることが困難という問題が指摘されている。特にアームを高速駆動させる場合、大容量のモータが必要不可欠となり、この点でも小型軽量化を図ることが非常に困難となる。
【0005】
本発明は上記した背景の下で創作されたものであって、その目的とするところは、構造
が非常にシンプルな移動機構及びこれを用いたピックアンドプレース装置を提供すること
にある。
【課題を解決するための手段】
【0006】
上記課題を解決するために本発明の移動機構は、独立して駆動可能な第1、第2の駆動
源と、第1、第2のベルトが走行可能なように第1、第2の駆動源に連結された第1、第
2のベルト・プーリと、第1のベルトと第2のベルトとの間に配置され且つ第1のベルト
と第2のベルトが交差するように掛け回された移動プーリ部と、移動プーリ部を直線上に移動自在に案内するガイド部とを具備している。
【0007】
上記発明による場合、第1、第2の駆動源が独立して駆動されると、これに伴って第1
、第2のベルトが走行して移動プーリ部がガイド部に沿って直線状に移動することになる
。よって、従来に比べて部品点数が少なくその構造が非常にシンプルであることから、小型化、低コスト化及びメンテナンス性の向上を容易に図ることが可能になる。特に第1、第2の駆動源の駆動運動を移動プーリ部の直線運動に変換する機構の構成がシンプルであることから損失が小さい。よって、移動プーリ部を高速駆動させる場合であっても大容量の駆動源が不要となり、この点でも小型軽量化を図ることが可能になる。
【0008】
好ましくは、ガイド部の代わりに、移動プーリ部を回転可能に軸支するとともに直線上又は平面上に移動自在に案内する軸ガイド部とを使用すると良い。この場合、両駆動源の回転方向や一方の駆動源の回転停止に対応した駆動パターンで移動プーリ部が直線状に移動したり回転したりする。よって、移動プーリ部の移動パターン等の範囲が拡大され、この点で高性能化を図ることが可能になる。
【0009】
軸ガイド部の具体例としては、ベルト方向に配置された直線ガイド部と、前記移動プーリ部を軸支するとともに直線ガイド部に沿って直線移動自在な可動部と、第1のベルトの第2のベルト側の一部を移動プーリ部の半周面側に掛け回すために同プーリ部の両側にて案内する第1のローラと、第2のベルトの第1のベルト側の一部を移動プーリ部の他の半周面側に掛け回すために同プーリ部の両側にて案内する第2のローラとを備えたものがある。第1、第2のローラについては、移動プーリ部との間で三角形、逆三角形の位置関係となるように可動部上の移動プーリ部を中心とした位置に各々配設すると良い。
【0010】
本発明のピックアンドプレース装置は、上記移動機構と、同移動機構の移動プーリ部に
連結され且つ先端側に移動対象物を把持可能なアーム機構とを備えている。
【0011】
上記発明による場合、アーム機構を移動させる機構として上記移動機構が使用されてい
ることから、構造が非常にシンプルとなり、小型化及び低コスト化を容易に図ることが可
能になる。
【0012】
好ましくは、アーム機構が移動プーリ部に着脱自在である構成にすると良い。この場合
、多種多様な機能を有するアーム機構への取り替えが容易であることから使い勝手が良好
になる。
【0013】
アーム機構の具体例としては、アーム機構は、軸ガイド部の可動部に保持される基台と、先端側に移動対象物を把持可能なアームと、移動プーリ部の回転運動をアームのベルト方向に直交した方向の直線運動に変換する上下変換機構とを有したものがある。少なくともアームの先端側を回転させる回転駆動部を組み合わせても良い。また、先端側に移動対象物を把持可能なアームを有し、同アームの基端側には移動プーリ部に連結可能であり且つ同アームの先端側を揺動させるための回転軸が設けられたものがある。さらに、軸ガイド部の可動部に保持される基台と、先端部に移動対象物を把持可能なアームと、移動プーリ部の回転運動をアームのその長さ方向を基軸とした回転運動に変換させる回転変換機構とを有したものがある。これらの場合、アームが直線運動だけでなく回転運動や揺動運動をすることから、移動パターン等が拡がり、この点で高性能化を図ることが可能になる。また、第1の駆動源と第2の駆動源のベルトの掛け回しで駆動し、各駆動源のトルクを合成した動力で各方向への駆動が行えるため、駆動源を効率的に使う事ができ、この点で一層の小型化を図ることが可能になる。
【図面の簡単な説明】
【0014】
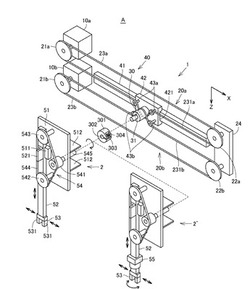
【図1】本発明の実施形態に係るピックアンドプレース装置の模式的分解斜視図である。
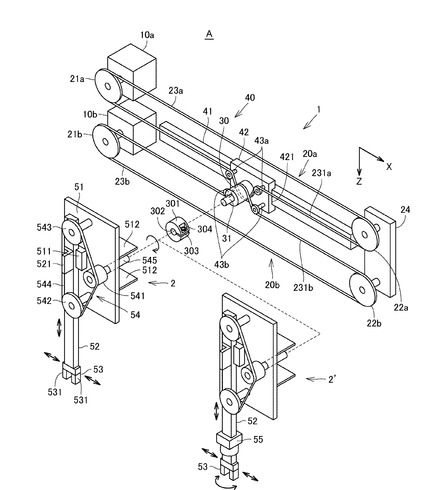
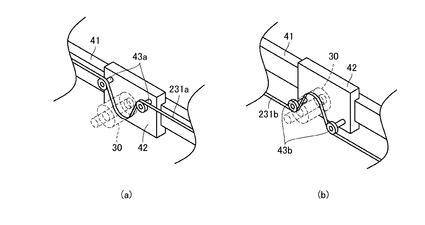
【図2】同装置の第1、第2のベルト・プーリの各ベルトを移動プーリ部に掛け回す方法を説明するための図であって、(a)は第1のベルト・プーリのベルト等の説明図、(b)は第2のベルト・プーリのベルト等の説明図である。
【図3】同装置の正裏面側視模式的斜視図であって、アームの移動パターンを併せて示す説明図である。
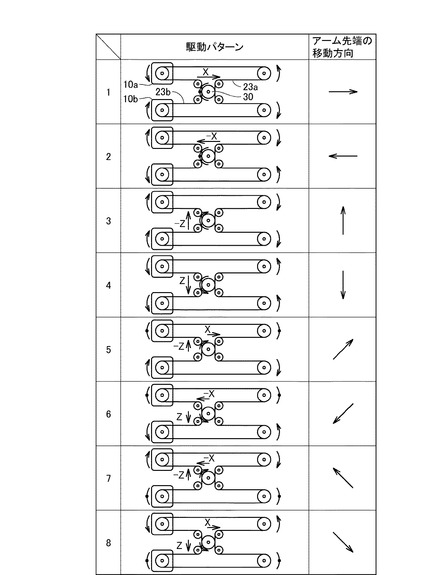
【図4】同装置のアームの駆動パターンを説明する図であって、第1、第2の駆動源の回転方向等とアームの移動方向との対応関係を示す図である。
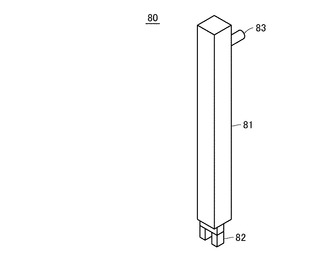
【図5】第1変形例に係る図であってアームの模式的斜視図である
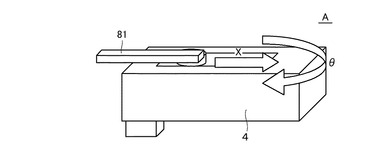
【図6】第1変形例に係るピックアンドプレース装置の側面側視模式的斜視図であって、アームの移動パターンを併せて示す説明図である。
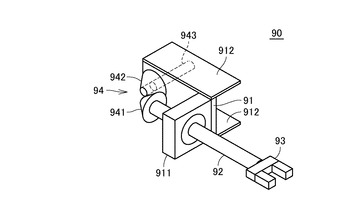
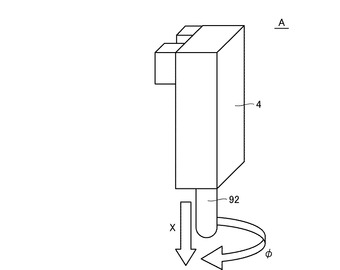
【図7】第2変形例に係る図であってアーム機構の模式的斜視図である
【図8】第2変形例に係るピックアンドプレース装置の側面側視模式的斜視図であって、アームの移動パターンを併せて示す説明図である。
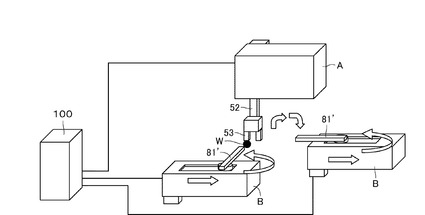
【図9】ピックアンドプレース装置の使用例を説明するため模式図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態に係るピックアンドプレース装置を図1乃至図4を参照して説明する。また、図5乃至図9を参照しつつ同装置の変形例及び適用例を説明する。なお、特許請求の範囲に記載された発明特定事項と同装置の構成要素との間で対応関係が不明なものについては後記する符号の説明の欄において併せて示すものとする。
【0016】
ここに例として挙げるピックアンドプレース装置Aは、タイミングプーリ30を直線駆動可能な移動機構1と、図外の部品やワーク等(移動対称物)を把持可能な直進アームモジュール2と、移動機構1にアーム機構2を着脱可能に連結するカップリング3と、ハウジング4(図3参照)とを有し、図外のコントローラから出力された信号を入力として図外の部品等を把持して別の場所に移動させる基本構成となっている。なお、移動機構1、直進アームモジュール2及びカップリング3は、図3に示すように直進アームモジュール2の一部を除いてハウジング4により覆われている。
【0017】
移動機構1については、図1に示すようにステッピングモータ10a、10bと、ベルト・プーリ20a、20bと、タイミングプーリ30と、軸ガイド部40とを有している。
【0018】
ステッピングモータ10a、10bについては、図外のドライバが各々接続されており
独立して駆動可能になっている。ステッピングモータ10a、10bのシャフトにはタイミングプーリ21a、21bが各々取り付けられている。上記コントローラから出力されたパルス信号や方向信号が同ドライバに入力されて励磁信号に各々変換され、同ドライバから出力された励磁信号がステッピングモータ10a、10bに各々入力されている。
【0019】
ベルト・プーリ20a、20bについては、タイミングプーリ30をベルト方向(図中
X方向)に交互に移動させる機構であって、X方向に並べて配置されたタイミングベルト23a、23bがステッピングモータ10a、10bのタイミングプーリ21a、21bに各々連結されている。
【0020】
ベルト・プーリ20aは、ステッピングモータ10aのシャフトに接続されたタイミングプーリ21aと、アイドラ固定台24の一方端部に取り付けられたアイドラ22aと、タイミングプーリ21aとアイドラ22aとの間に掛け回されたタイミングベルト23aとを有している。タイミングベルト23aの図中下側に位置するベルト部231aはタイミングプーリ30の図中下側半周面に掛け回されている。
【0021】
ベルト・プーリ20bは、ステッピングモータ10bのシャフトに接続されたタイミングプーリ21bと、アイドラ固定台24の他方端部に取り付けられたアイドラ22bと、タイミングプーリ21bとアイドラ22bとの間に掛け回されたタイミングベルト23bとを有している。タイミングベルト23bの図1中上側に位置するベルト部231bはタイミングプーリ30の図1中上側半周面に掛け回されている。
【0022】
軸ガイド部40については、タイミングプーリ30を回転可能に軸支するとともにX方向に直線上に移動自在に案内する部材である。具体的には、X方向に配置された長尺状のスライドガイド41と、上面中央部にタイミングプーリ30を軸支するとともに裏面に形成された溝421によりスライドガイド41に沿って直線移動自在な板状のガイドテーブル42と、タイミングベルト23aのベルト部231aをタイミングプーリ30の半周面に掛け回すために同プーリ30の両側にて案内する一対のアイドラ43aと、タイミングベルト23bのベルト部231bをタイミングプーリ30の他の半周面に掛け回すために同プーリ30の両側にて案内する一対のアイドラ43bとを有している。ガイドテーブル
42の上面中央部においてタイミングプーリ30を軸支している。ガイドテーブル42の
裏面にはスライドガイド41が入り込む溝421が形成されている。アイドラ43a、43bは、タイミングプーリ30との間で正面視三角形、逆三角形の位置関係となるように各々配設されている。
【0023】
タイミングプーリ30については、ベルト・プーリ20aのタイミングベルト23aの
ベルト部231aとベルト・プーリ20bのタイミングベルト23bのベルト部231bとの間に位置しており、ベルト部231aとベルト部231bとが対称に交差するように掛け回されている。即ち、図2(a)に示すようにタイミングベルト23aのベルト部231aがアイドラ43a、43aに案内されてタイミングプーリ30の図中下側の半周面側面に掛け回されている一方、図2(b)に示すようにタイミングベルト23bのベ々ルト部231bがアイドラ43b、43bに案内されてタイミングプーリ30の図中上側面に掛け回されている。
【0024】
タイミングプーリ30の両端面の中心には図1に示すように回転軸31が各々形成され
ている。回転軸31の一方側(図示されず)はガイドテーブル42に軸支されており、回
転軸31の他方側はカップリング3に挿入可能になっている。
【0025】
カップリング3については、移動機構1と直進アームモジュール2との間を連結する連結具である。具体的には、弾性を有した略環状の本体301と、移動機構1側の回転軸31と直進アームモジュール2側の後述の回転軸545(後述する)が反対方向から別々に挿入される中心孔302と、本体301に軸方向に沿って形成された溝303と、回転軸31及び回転軸545を本体301の縮径方向の弾性変形による締め付け力により固定するための本体301に取り付けられたネジ304とを有している。即ち、カップリング3により直進アームモジュール2がタイミングプーリ30に着脱自在になっている。
【0026】
直進アームモジュール2については、タイミングプーリ30に連結され且つ先端側に図
外の部品等を把持可能な機構である。具体的には、軸ガイド部40のガイドテーブル42に保持可能なモジュール取付板51と、モジュール取付板51の表面に沿って直線移動可能なアーム52と、アーム52の先端部に設けられ且つ部品等を把持可能なチャック53と、タイミングプーリ30の回転運動をアーム52のX方向に直交した方向(Z方向)の直線運動に変換するための上下変換機構54とを有している。
【0027】
モジュール取付板51については、アーム52及び上下変換機構54等を取り付けるための長方形の板材であって、同取付板51の表面に設けられ且つアーム52をZ方向に移動可能に案内するガイド511と、同取付板51の裏面にX方向に沿って設けられ且つガイドテーブル42の各長辺に挟み込んで保持可能な接続固定板512、512とを有している。接続固定板512、512は、タイミングプーリ30が回転しても直進アームモジュール2全体が回転するのを防止するために設けられている。
【0028】
アーム52については、モジュール取付板51の長辺に比べて長い直線状板材であり、その基端部表面側には断面L字状のベルト固定金具521が取り付けられている。
【0029】
チャック53については、図外の部品等を把持するために爪531、531を図示矢印方向に開閉するメカニカルチャックであって、図示されていないが、内部には爪531の開閉力を発生するステッピングモータ及び同モータの回転運動を爪531の開閉運動に変換する機構が設けられている。チャック53のステッピングモータは、図外のコントローラ(図9中のコントローラ100参照)によりステッピングモータ10a、10bと同様に回転駆動が制御されている。
【0030】
上下変換機構54については、モジュール取付板51の表面に軸支されたタイミングプーリ541、アイドラ542、543と、タイミングプーリ541、アイドラ542、543に掛け回されたタイミンクベルト544と、タイミングプーリ541に連結され且つモジュール取付板51の裏側から取り出された回転軸545とを有している。アイドラ542とアイドラ543との間のタイミングベルト544にベルト固定金具521の先端部が固着されている。
【0031】
なお、図2中には直進回転アームモジュール2’が併せて示されている。直進回転アームモジュール2’は、アーム52の長さ方向の中間部位にアーム52の先端側を回転させるためのモータ55が設けられている点を除いて、上記直進アームモジュール2と同様の構成となっている。直進アームモジュール2と直進回転アームモジュール2’とはカップリング3を通じて交互に交換可能になっている。下記の他のアームモジュールについても同様である。
【0032】
上記のように構成されたピックアンドプレース装置Aは、移動機構1により直進アームモジュール2をX方向に移動可能であると同時に、直進アームモジュール2によりタイミ
ングプーリ30の回転運動に従ってアーム52をZ方向に移動可能となっている。また、アーム52の先端部に設けられたチャック53により対象物αが把持可能である。
【0033】
ステッピングモータ10a、10bの駆動パターンとアーム52の先端部の移動方向と
の対応関係は図4に示す通りである。図4中左側はステッピングモータ10a、10bの
回転方向等を含めた移動機構1の模式図、図4中右側はアーム52の先端部の移動方向を
示した図であり、駆動パターン1〜8毎に示されている。
【0034】
駆動パターン1においては、ステッピングモータ10aが図示矢印方向(反転方向)、
ステッピングモータ10bが図示矢印方向(正転方向)に等速度で駆動される。この場合
、タイミングプーリ30に対するタイミングベルト23a、23bの各走行速度が同方向
且つ同一であることから、タイミングプーリ30が回転することなくX方向に直進アームモジュール2とともに移動する。これに伴ってアーム52の先端部がX方向に移動することになる。
【0035】
駆動パターン2においては、ステッピングモータ10aが図示矢印方向(正転方向)、
ステッピングモータ10bが図示矢印方向(反転方向)に等速度で駆動される。この場合
、タイミングプーリ30に対するタイミングベルト23a、23bの各走行速度が上記と
は反対の同方向且つ同一であることから、タイミングプーリ30が回転することなく−X
方向に直進アームモジュール2とともに移動する。これに伴ってアーム52の先端部がX方向に移動することになる。
【0036】
駆動パターン3においては、ステッピングモータ10aが図示矢印方向(正転方向)、
ステッピングモータ10bが図示矢印方向(正転方向)に等速度で駆動される。この場合
、タイミングプーリ30に対するタイミングベルト23a、23bの各走行速度が反対方
向且つ同一であることから、タイミングプーリ30が移動することなく図示矢印方向(正
転方向)に回転する。これに伴って、直進アームモジュール2によりアーム52の先端部が−Z方向に移動することになる。
【0037】
駆動パターン4においては、ステッピングモータ10aが図示矢印方向(反転方向)、
ステッピングモータ10bが図示矢印方向(反転方向)に等速度で駆動される。この場合
、タイミングプーリ30に対するタイミングベルト23a、23bの各走行速度が上記と
は反対方向且つ同一であることから、タイミングプーリ30が移動することなく図示矢印
方向(反転方向)に回転する。これに伴って、直進アームモジュール2によりアーム52の先端部がZ方向に移動することになる。
【0038】
駆動パターン5においては、ステッピングモータ10aが駆動されず、ステッピングモ
ータ10bが図示矢印方向(正転方向)に駆動される。この場合、タイミングベルト23
bのみが走行していることから、タイミングプーリ30がタイミングベルト23aとの間
の摩擦に抗してX方向に直進アームモジュール2とともに移動する。と同時に、タイミングプーリ30がタイミングベルト23aとの間の摩擦に抗して図示矢印方向(正転方向)に回転することから、直進アームモジュール2によりアーム52の先端部が−Z方向に移動する。これに伴って、アーム52の先端部が図示矢印方向に斜めに移動することになる。
【0039】
駆動パターン6においては、ステッピングモータ10aが駆動されず、ステッピングモ
ータ10bが図示矢印方向(反転方向)に駆動される。この場合、タイミングベルト23
bのみが走行していることから、タイミングプーリ30がタイミングベルト23aとの間
の摩擦に抗して−X方向に直進アームモジュール2とともに移動する。と同時に、タイミングプーリ30がタイミングベルト23aとの間の摩擦に抗して図示矢印方向(反転方向)に回転することから、直進アームモジュール2によりアーム52の先端部がZ方向に移動する。これに伴って、アーム52の先端部が図示矢印方向に斜めに移動することになる。
【0040】
駆動パターン7においては、ステッピングモータ10bが駆動されず、ステッピングモ
ータ10aが図示矢印方向(正転方向)に駆動される。この場合、タイミングベルト23aのみが走行していることから、タイミングプーリ30がタイミングベルト23bとの間の摩擦に抗して−X方向に直進アームモジュール2とともに移動する。と同時に、タイミングプーリ30がタイミングベルト23bとの間の摩擦に抗して図示矢印方向(正転方向)に回転することから、直進アームモジュール2によりアーム52の先端部が−Z方向に移動する。これに伴って、アーム52の先端部が図示矢印方向に斜めに移動することになる。
【0041】
駆動パターン8においては、ステッピングモータ10bが駆動されず、ステッピングモ
ータ10aが図示矢印方向(反転方向)に駆動される。この場合、タイミングベルト23aのみが走行していることから、タイミングプーリ30がタイミングベルト23bとの間の摩擦に抗してX方向に直進アームモジュール2とともに移動する。と同時に、タイミングプーリ30がタイミングベルト23bとの間の摩擦に抗して図示矢印方向(反転方向)に回転することから、直進アームモジュール2によりアーム52の先端部がZ方向に移動する。これに伴って、アーム52の先端部が図示矢印方向に斜めに移動することになる。
【0042】
上記した駆動パターン1〜8は典型例を示したものであるが、ステッピングモータ10
a、10bの速度比及び各回転方向等を上記コントローラにより微細制御することにより
アーム52の先端部を図3に示すようにX−Z平面上を任意に移動させることが可能にな
る。また、チャック53の開閉を併せて制御すると、図外の部品等がチャック53により
把持され、同部品等をX−Z平面上を自由に移動させることが可能になる。
【0043】
ピックアンドプレース装置Aは図1に示すように構造が非常にシンプルであり、従来例
に比べて部品点数が少ない。ステッピングモータ10a、10bの回転運動をアーム52の直線運動に変換する機構上、機械的な損失が小さい。直進アームモジュール2にモータ等の駆動源が設けられていないことから可動部分の重量が軽い。よって、装置自体の小型軽量化、高速駆動化及び低コスト化を図ることが可能になった。しかもアーム52等を駆動させる駆動源がステッピングモータ10aとステッピングモータ10bに分散されており、この点で装置のレイアウトがシンプルになり、メンテナンス向上を図ることも可能になった。また、直進アームモジュール2を直進回転アームモジュール2’に取り替えると、アーム52が直線運動するだけでなく回転運動することから、利用範囲が拡大する。下記の他のアームモジュールに取り替えても同様である。さらに、ステッピングモータ10a、10bの各トルクを合成した動力でアーム52等を各方向へ駆動が行えるため、駆動源を効率的に使う事ができ、この点でも装置の一層の小型化を図ることが可能になる。
【0044】
次に、直進アームモジュール2の代わりにヨーイング回転アームモジュール80を用いた変形例を図5及び図6を参照して説明する。なお、上記例と同一の構成部について原則として同一の部品番号を付して表し、その説明は省略するものとする。
【0045】
ヨーイング回転アームモジュール80については、図5に示すように直線状板材のアーム81と、アーム81の先端部に設けられ且つ部品等を把持可能なチャック82と、アーム81の基端部裏面側に設けられた回転軸83とを有した構成となっている。なお、チャック82、回転軸83は上記例のチャック53、回転軸545と同一機能を有している。
【0046】
ヨーイング回転アームモジュール80は移動機構1のタイミングプーリ30にカップリング3を介して連結され、アーム81がタイミングプーリ30と共に回転するようになっている。アーム81の回転方向を図6中θ方向として表している。
【0047】
ヨーイング回転アームモジュール80を用いたピックアンドプレース装置Aは図6に示す通りであり、以下のような動作となる。図4に示す駆動パターン1、2においてはアーム81の先端部が上記例と同じくX方向、−X方向に移動する。駆動パターン3、4においてはアーム81の先端部が上記例とは異なり−Z方向、Z方向ではなくθ方向、−θ方向に回転する。駆動パターン5〜8においては上記例と同様にX方向の移動とθ方向の回転との組み合わせとなる。
【0048】
次に、ローリング回転アームモジュール90を用いた変形例を図7及び図8を参照して説明する。なお、上記例と同一の構成部について原則として同一の部品番号を付して表し、その説明は省略するものとする。
【0049】
ローリング回転アームモジュール90については、図7に示すように軸ガイド部40のガイドテーブル42に保持可能な接続固定板91と、接続固定板91の表面に沿わせてX方向に向けて配置され且つ軸受台911により軸支されたアーム92と、アーム92の先端部に設けられ且つ部品等を把持可能なチャック93と、タイミングプーリ30の回転運動をアーム92の長さ方向を基軸とした回転運動に変換させる回転変換機構94とを有している。接続固定板91には軸受台911が設けられている他、ガイドテーブル42の各長辺に挟み込んで保持可能な接続固定板912、912が設けられている。なお、接続固定板912、912は、上記例の接続固定板512と同一機能を有している。チャック93は上記例のチャック53と同一機能を有している。
【0050】
回転変換機構94は、アーム92の後端部に設けられたかさ歯車941と、かさ歯車9
41に噛み合っており且つ接続固定板91に軸支されたかさ歯車942と、かさ歯車94
2に連結されたアーム92に対して直交した軸部材であり接続固定板91の裏側から取り
出された回転軸943とを有している。なお、回転軸943は上記例の回転軸545と同
一機能を有している。
【0051】
ローリング回転アームモジュール90は移動機構1のタイミングプーリ30にカップリング3を介して連結され、アーム92がタイミングプーリ30と共に回転するようになっている。アーム92の回転方向を図8中φ方向として表している。
【0052】
直進アームモジュール2の代わりにローリング回転アームモジュール90を用いたピックアンドプレース装置Aは図8に示す通りであり、以下のような動作となる。図4に示す駆動パターン1、2においてはアーム92の先端部が上記例と同じくX方向、−X方向に移動する。駆動パターン3、4においてはアーム92の先端部が上記例とは異なり−Z方向、Z方向ではなくφ方向、−φ方向に回転する。駆動パターン5〜8においては上記例と同様にX方向の移動とφ方向の回転との組み合わせとなる。
【0053】
図1乃至図8に示すピックアンドプレース装置Aにおいて、チャック53、82及び9
3を省略した形態であっても良い。この場合、部品等を把持する機能が失われることから
、ピックアンドプレース装置とは言えず、単に部品等を移動させる移動装置となる。移動装置を活用した応用例について図9を参照して説明する。
【0054】
図9中に示された移動装置Bは、図5及び図6に示されたピックアンドプレース装置A
をベースとし、アーム81からチャック82が省略された装置である。同装置Bに使用さ
れたアームをアーム81’として表している。また、図9中に示されたピックアンドプレ
ース装置Aは、図3に示された直進アームモジュール2を用いた装置である。各装置がコントローラ100により制御されている。ここでは、2台の移動装置Bを利用してワークWをピックアンドプレース装置Aの近くに搬送し、同装置Aを利用してワークWを把持して別の場所に搬送させるようになっている。
【0055】
なお、本発明に係る移動機構については、ピックアンドプレース装置だけの適用に止ま
らず移動対象物を移動させるものであればどのようなものにも適用可能である。第1、第
2の駆動源については、直流モータ、交流モータだけでなく油圧シリンダ等であっても良
い。第1、第2のベルト・プーリについては、第1、第2のベルトが走行可能なように第
1、第2の駆動源に連結された構成である限り、種類や配置等が問われない。移動プーリ
部については、第1のベルトと第2のベルトとの間に配置され且つ第1のベルトと第2の
ベルトが交差するように掛け回されている限り、外周面の歯の有無、滑車の種類やベルトの掛け回し方法が問われない。軸ガイド部については、移動プーリ部を回転可能に軸支するとともに移動プーリ部を直線上に移動自在に案内する構成である限り、その種類等が問われない。移動プーリ部を回転させる必要がないのであれば、軸ガイド部の代わりに、移動プーリ部をベルト方向に直線上に移動自在に案内するガイド部を用いると良い。
【0056】
本発明に係るピックアンドプレース装置については、アーム機構の先端側を単にXーZ
平面上に移動させるのでなく、2台の移動機構を用いてX−Y−Z空間上を移動させる形
態であっても良い。移動機構については上記の通りである。アーム機構については、移動
機構の移動プーリ部に連結され且つ先端側に移動対象物を把持可能な構成である限り、把
持の方法やアームの形状等が問われない。特に、移動プーリ部の回転力を用いることなく
別のモータ等を用いてアームを上下に移動したり、移動プーリ部の回転力を積極的に用い
てチャックを動作させる形態であっても良い。また、アーム機構を移動プーリ部にカップ
リングを用いることなく直接に連結するようにしても良い。さらに、回転駆動部については、アームの先端部だけでなくその全体を回転させる形態であってもかまわない。
【符号の説明】
【0057】
A ピックアンドプレース装置
1 移動機構
10a,10b ステッピングモータ(第1、第2の駆動源)
20a,20b ベルト・プーリ(第1、第2のベルト・プーリ)
21a,21b タイミングプーリ
22a,22b アイドラ
23a,23b タイミングベルト
30 タイミングプーリ(移動プーリ部)
40 軸ガイド部
41 スライドガイド(直線ガイド部)
42 ガイドテーブル(可動部)
43a、43b アイドラ(第1、第2のローラ)
2 直進アームモジュール(アーム機構)
51 モジュール取付板(基台)
52 アーム
53 チャック
54 上下変換機構
2’ 直進回転アームモジュール(アーム機構)
51 モジュール取付板(基台)
52 アーム
53 チャック
54 上下変換機構
55 モータ(回転駆動部)
3 カップリング
80 ヨーイング回転アームモジュール(アーム機構)
81 アーム
82 チャック
83 回転軸
90 ローリング回転アームモジュール(アーム機構)
91 接続固定板(基台)
92 アーム
93 チャック
94 回転変換機構
【技術分野】
【0001】
本発明はワークを移動させる移動機構及びこれを用いたピックアンドプレース装置に関
する。
【背景技術】
【0002】
部品を把持して他の場所へ移動させるピックアンドプレース装置については、様々な分
野で広く使用されており、ワークを把持可能なアームと、カム機構やモータを組み合わせてアームを移動させる移動機構とを有した構成となっているのが一般的である(例えば、特許文献1等)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−152505号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来例による場合、移動機構の部品点数が多くその構造が複雑であ
ることから、小型軽量化、低コスト化及びメンテナンス性の向上を図ることが困難という問題が指摘されている。特にアームを高速駆動させる場合、大容量のモータが必要不可欠となり、この点でも小型軽量化を図ることが非常に困難となる。
【0005】
本発明は上記した背景の下で創作されたものであって、その目的とするところは、構造
が非常にシンプルな移動機構及びこれを用いたピックアンドプレース装置を提供すること
にある。
【課題を解決するための手段】
【0006】
上記課題を解決するために本発明の移動機構は、独立して駆動可能な第1、第2の駆動
源と、第1、第2のベルトが走行可能なように第1、第2の駆動源に連結された第1、第
2のベルト・プーリと、第1のベルトと第2のベルトとの間に配置され且つ第1のベルト
と第2のベルトが交差するように掛け回された移動プーリ部と、移動プーリ部を直線上に移動自在に案内するガイド部とを具備している。
【0007】
上記発明による場合、第1、第2の駆動源が独立して駆動されると、これに伴って第1
、第2のベルトが走行して移動プーリ部がガイド部に沿って直線状に移動することになる
。よって、従来に比べて部品点数が少なくその構造が非常にシンプルであることから、小型化、低コスト化及びメンテナンス性の向上を容易に図ることが可能になる。特に第1、第2の駆動源の駆動運動を移動プーリ部の直線運動に変換する機構の構成がシンプルであることから損失が小さい。よって、移動プーリ部を高速駆動させる場合であっても大容量の駆動源が不要となり、この点でも小型軽量化を図ることが可能になる。
【0008】
好ましくは、ガイド部の代わりに、移動プーリ部を回転可能に軸支するとともに直線上又は平面上に移動自在に案内する軸ガイド部とを使用すると良い。この場合、両駆動源の回転方向や一方の駆動源の回転停止に対応した駆動パターンで移動プーリ部が直線状に移動したり回転したりする。よって、移動プーリ部の移動パターン等の範囲が拡大され、この点で高性能化を図ることが可能になる。
【0009】
軸ガイド部の具体例としては、ベルト方向に配置された直線ガイド部と、前記移動プーリ部を軸支するとともに直線ガイド部に沿って直線移動自在な可動部と、第1のベルトの第2のベルト側の一部を移動プーリ部の半周面側に掛け回すために同プーリ部の両側にて案内する第1のローラと、第2のベルトの第1のベルト側の一部を移動プーリ部の他の半周面側に掛け回すために同プーリ部の両側にて案内する第2のローラとを備えたものがある。第1、第2のローラについては、移動プーリ部との間で三角形、逆三角形の位置関係となるように可動部上の移動プーリ部を中心とした位置に各々配設すると良い。
【0010】
本発明のピックアンドプレース装置は、上記移動機構と、同移動機構の移動プーリ部に
連結され且つ先端側に移動対象物を把持可能なアーム機構とを備えている。
【0011】
上記発明による場合、アーム機構を移動させる機構として上記移動機構が使用されてい
ることから、構造が非常にシンプルとなり、小型化及び低コスト化を容易に図ることが可
能になる。
【0012】
好ましくは、アーム機構が移動プーリ部に着脱自在である構成にすると良い。この場合
、多種多様な機能を有するアーム機構への取り替えが容易であることから使い勝手が良好
になる。
【0013】
アーム機構の具体例としては、アーム機構は、軸ガイド部の可動部に保持される基台と、先端側に移動対象物を把持可能なアームと、移動プーリ部の回転運動をアームのベルト方向に直交した方向の直線運動に変換する上下変換機構とを有したものがある。少なくともアームの先端側を回転させる回転駆動部を組み合わせても良い。また、先端側に移動対象物を把持可能なアームを有し、同アームの基端側には移動プーリ部に連結可能であり且つ同アームの先端側を揺動させるための回転軸が設けられたものがある。さらに、軸ガイド部の可動部に保持される基台と、先端部に移動対象物を把持可能なアームと、移動プーリ部の回転運動をアームのその長さ方向を基軸とした回転運動に変換させる回転変換機構とを有したものがある。これらの場合、アームが直線運動だけでなく回転運動や揺動運動をすることから、移動パターン等が拡がり、この点で高性能化を図ることが可能になる。また、第1の駆動源と第2の駆動源のベルトの掛け回しで駆動し、各駆動源のトルクを合成した動力で各方向への駆動が行えるため、駆動源を効率的に使う事ができ、この点で一層の小型化を図ることが可能になる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態に係るピックアンドプレース装置の模式的分解斜視図である。
【図2】同装置の第1、第2のベルト・プーリの各ベルトを移動プーリ部に掛け回す方法を説明するための図であって、(a)は第1のベルト・プーリのベルト等の説明図、(b)は第2のベルト・プーリのベルト等の説明図である。
【図3】同装置の正裏面側視模式的斜視図であって、アームの移動パターンを併せて示す説明図である。
【図4】同装置のアームの駆動パターンを説明する図であって、第1、第2の駆動源の回転方向等とアームの移動方向との対応関係を示す図である。
【図5】第1変形例に係る図であってアームの模式的斜視図である
【図6】第1変形例に係るピックアンドプレース装置の側面側視模式的斜視図であって、アームの移動パターンを併せて示す説明図である。
【図7】第2変形例に係る図であってアーム機構の模式的斜視図である
【図8】第2変形例に係るピックアンドプレース装置の側面側視模式的斜視図であって、アームの移動パターンを併せて示す説明図である。
【図9】ピックアンドプレース装置の使用例を説明するため模式図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態に係るピックアンドプレース装置を図1乃至図4を参照して説明する。また、図5乃至図9を参照しつつ同装置の変形例及び適用例を説明する。なお、特許請求の範囲に記載された発明特定事項と同装置の構成要素との間で対応関係が不明なものについては後記する符号の説明の欄において併せて示すものとする。
【0016】
ここに例として挙げるピックアンドプレース装置Aは、タイミングプーリ30を直線駆動可能な移動機構1と、図外の部品やワーク等(移動対称物)を把持可能な直進アームモジュール2と、移動機構1にアーム機構2を着脱可能に連結するカップリング3と、ハウジング4(図3参照)とを有し、図外のコントローラから出力された信号を入力として図外の部品等を把持して別の場所に移動させる基本構成となっている。なお、移動機構1、直進アームモジュール2及びカップリング3は、図3に示すように直進アームモジュール2の一部を除いてハウジング4により覆われている。
【0017】
移動機構1については、図1に示すようにステッピングモータ10a、10bと、ベルト・プーリ20a、20bと、タイミングプーリ30と、軸ガイド部40とを有している。
【0018】
ステッピングモータ10a、10bについては、図外のドライバが各々接続されており
独立して駆動可能になっている。ステッピングモータ10a、10bのシャフトにはタイミングプーリ21a、21bが各々取り付けられている。上記コントローラから出力されたパルス信号や方向信号が同ドライバに入力されて励磁信号に各々変換され、同ドライバから出力された励磁信号がステッピングモータ10a、10bに各々入力されている。
【0019】
ベルト・プーリ20a、20bについては、タイミングプーリ30をベルト方向(図中
X方向)に交互に移動させる機構であって、X方向に並べて配置されたタイミングベルト23a、23bがステッピングモータ10a、10bのタイミングプーリ21a、21bに各々連結されている。
【0020】
ベルト・プーリ20aは、ステッピングモータ10aのシャフトに接続されたタイミングプーリ21aと、アイドラ固定台24の一方端部に取り付けられたアイドラ22aと、タイミングプーリ21aとアイドラ22aとの間に掛け回されたタイミングベルト23aとを有している。タイミングベルト23aの図中下側に位置するベルト部231aはタイミングプーリ30の図中下側半周面に掛け回されている。
【0021】
ベルト・プーリ20bは、ステッピングモータ10bのシャフトに接続されたタイミングプーリ21bと、アイドラ固定台24の他方端部に取り付けられたアイドラ22bと、タイミングプーリ21bとアイドラ22bとの間に掛け回されたタイミングベルト23bとを有している。タイミングベルト23bの図1中上側に位置するベルト部231bはタイミングプーリ30の図1中上側半周面に掛け回されている。
【0022】
軸ガイド部40については、タイミングプーリ30を回転可能に軸支するとともにX方向に直線上に移動自在に案内する部材である。具体的には、X方向に配置された長尺状のスライドガイド41と、上面中央部にタイミングプーリ30を軸支するとともに裏面に形成された溝421によりスライドガイド41に沿って直線移動自在な板状のガイドテーブル42と、タイミングベルト23aのベルト部231aをタイミングプーリ30の半周面に掛け回すために同プーリ30の両側にて案内する一対のアイドラ43aと、タイミングベルト23bのベルト部231bをタイミングプーリ30の他の半周面に掛け回すために同プーリ30の両側にて案内する一対のアイドラ43bとを有している。ガイドテーブル
42の上面中央部においてタイミングプーリ30を軸支している。ガイドテーブル42の
裏面にはスライドガイド41が入り込む溝421が形成されている。アイドラ43a、43bは、タイミングプーリ30との間で正面視三角形、逆三角形の位置関係となるように各々配設されている。
【0023】
タイミングプーリ30については、ベルト・プーリ20aのタイミングベルト23aの
ベルト部231aとベルト・プーリ20bのタイミングベルト23bのベルト部231bとの間に位置しており、ベルト部231aとベルト部231bとが対称に交差するように掛け回されている。即ち、図2(a)に示すようにタイミングベルト23aのベルト部231aがアイドラ43a、43aに案内されてタイミングプーリ30の図中下側の半周面側面に掛け回されている一方、図2(b)に示すようにタイミングベルト23bのベ々ルト部231bがアイドラ43b、43bに案内されてタイミングプーリ30の図中上側面に掛け回されている。
【0024】
タイミングプーリ30の両端面の中心には図1に示すように回転軸31が各々形成され
ている。回転軸31の一方側(図示されず)はガイドテーブル42に軸支されており、回
転軸31の他方側はカップリング3に挿入可能になっている。
【0025】
カップリング3については、移動機構1と直進アームモジュール2との間を連結する連結具である。具体的には、弾性を有した略環状の本体301と、移動機構1側の回転軸31と直進アームモジュール2側の後述の回転軸545(後述する)が反対方向から別々に挿入される中心孔302と、本体301に軸方向に沿って形成された溝303と、回転軸31及び回転軸545を本体301の縮径方向の弾性変形による締め付け力により固定するための本体301に取り付けられたネジ304とを有している。即ち、カップリング3により直進アームモジュール2がタイミングプーリ30に着脱自在になっている。
【0026】
直進アームモジュール2については、タイミングプーリ30に連結され且つ先端側に図
外の部品等を把持可能な機構である。具体的には、軸ガイド部40のガイドテーブル42に保持可能なモジュール取付板51と、モジュール取付板51の表面に沿って直線移動可能なアーム52と、アーム52の先端部に設けられ且つ部品等を把持可能なチャック53と、タイミングプーリ30の回転運動をアーム52のX方向に直交した方向(Z方向)の直線運動に変換するための上下変換機構54とを有している。
【0027】
モジュール取付板51については、アーム52及び上下変換機構54等を取り付けるための長方形の板材であって、同取付板51の表面に設けられ且つアーム52をZ方向に移動可能に案内するガイド511と、同取付板51の裏面にX方向に沿って設けられ且つガイドテーブル42の各長辺に挟み込んで保持可能な接続固定板512、512とを有している。接続固定板512、512は、タイミングプーリ30が回転しても直進アームモジュール2全体が回転するのを防止するために設けられている。
【0028】
アーム52については、モジュール取付板51の長辺に比べて長い直線状板材であり、その基端部表面側には断面L字状のベルト固定金具521が取り付けられている。
【0029】
チャック53については、図外の部品等を把持するために爪531、531を図示矢印方向に開閉するメカニカルチャックであって、図示されていないが、内部には爪531の開閉力を発生するステッピングモータ及び同モータの回転運動を爪531の開閉運動に変換する機構が設けられている。チャック53のステッピングモータは、図外のコントローラ(図9中のコントローラ100参照)によりステッピングモータ10a、10bと同様に回転駆動が制御されている。
【0030】
上下変換機構54については、モジュール取付板51の表面に軸支されたタイミングプーリ541、アイドラ542、543と、タイミングプーリ541、アイドラ542、543に掛け回されたタイミンクベルト544と、タイミングプーリ541に連結され且つモジュール取付板51の裏側から取り出された回転軸545とを有している。アイドラ542とアイドラ543との間のタイミングベルト544にベルト固定金具521の先端部が固着されている。
【0031】
なお、図2中には直進回転アームモジュール2’が併せて示されている。直進回転アームモジュール2’は、アーム52の長さ方向の中間部位にアーム52の先端側を回転させるためのモータ55が設けられている点を除いて、上記直進アームモジュール2と同様の構成となっている。直進アームモジュール2と直進回転アームモジュール2’とはカップリング3を通じて交互に交換可能になっている。下記の他のアームモジュールについても同様である。
【0032】
上記のように構成されたピックアンドプレース装置Aは、移動機構1により直進アームモジュール2をX方向に移動可能であると同時に、直進アームモジュール2によりタイミ
ングプーリ30の回転運動に従ってアーム52をZ方向に移動可能となっている。また、アーム52の先端部に設けられたチャック53により対象物αが把持可能である。
【0033】
ステッピングモータ10a、10bの駆動パターンとアーム52の先端部の移動方向と
の対応関係は図4に示す通りである。図4中左側はステッピングモータ10a、10bの
回転方向等を含めた移動機構1の模式図、図4中右側はアーム52の先端部の移動方向を
示した図であり、駆動パターン1〜8毎に示されている。
【0034】
駆動パターン1においては、ステッピングモータ10aが図示矢印方向(反転方向)、
ステッピングモータ10bが図示矢印方向(正転方向)に等速度で駆動される。この場合
、タイミングプーリ30に対するタイミングベルト23a、23bの各走行速度が同方向
且つ同一であることから、タイミングプーリ30が回転することなくX方向に直進アームモジュール2とともに移動する。これに伴ってアーム52の先端部がX方向に移動することになる。
【0035】
駆動パターン2においては、ステッピングモータ10aが図示矢印方向(正転方向)、
ステッピングモータ10bが図示矢印方向(反転方向)に等速度で駆動される。この場合
、タイミングプーリ30に対するタイミングベルト23a、23bの各走行速度が上記と
は反対の同方向且つ同一であることから、タイミングプーリ30が回転することなく−X
方向に直進アームモジュール2とともに移動する。これに伴ってアーム52の先端部がX方向に移動することになる。
【0036】
駆動パターン3においては、ステッピングモータ10aが図示矢印方向(正転方向)、
ステッピングモータ10bが図示矢印方向(正転方向)に等速度で駆動される。この場合
、タイミングプーリ30に対するタイミングベルト23a、23bの各走行速度が反対方
向且つ同一であることから、タイミングプーリ30が移動することなく図示矢印方向(正
転方向)に回転する。これに伴って、直進アームモジュール2によりアーム52の先端部が−Z方向に移動することになる。
【0037】
駆動パターン4においては、ステッピングモータ10aが図示矢印方向(反転方向)、
ステッピングモータ10bが図示矢印方向(反転方向)に等速度で駆動される。この場合
、タイミングプーリ30に対するタイミングベルト23a、23bの各走行速度が上記と
は反対方向且つ同一であることから、タイミングプーリ30が移動することなく図示矢印
方向(反転方向)に回転する。これに伴って、直進アームモジュール2によりアーム52の先端部がZ方向に移動することになる。
【0038】
駆動パターン5においては、ステッピングモータ10aが駆動されず、ステッピングモ
ータ10bが図示矢印方向(正転方向)に駆動される。この場合、タイミングベルト23
bのみが走行していることから、タイミングプーリ30がタイミングベルト23aとの間
の摩擦に抗してX方向に直進アームモジュール2とともに移動する。と同時に、タイミングプーリ30がタイミングベルト23aとの間の摩擦に抗して図示矢印方向(正転方向)に回転することから、直進アームモジュール2によりアーム52の先端部が−Z方向に移動する。これに伴って、アーム52の先端部が図示矢印方向に斜めに移動することになる。
【0039】
駆動パターン6においては、ステッピングモータ10aが駆動されず、ステッピングモ
ータ10bが図示矢印方向(反転方向)に駆動される。この場合、タイミングベルト23
bのみが走行していることから、タイミングプーリ30がタイミングベルト23aとの間
の摩擦に抗して−X方向に直進アームモジュール2とともに移動する。と同時に、タイミングプーリ30がタイミングベルト23aとの間の摩擦に抗して図示矢印方向(反転方向)に回転することから、直進アームモジュール2によりアーム52の先端部がZ方向に移動する。これに伴って、アーム52の先端部が図示矢印方向に斜めに移動することになる。
【0040】
駆動パターン7においては、ステッピングモータ10bが駆動されず、ステッピングモ
ータ10aが図示矢印方向(正転方向)に駆動される。この場合、タイミングベルト23aのみが走行していることから、タイミングプーリ30がタイミングベルト23bとの間の摩擦に抗して−X方向に直進アームモジュール2とともに移動する。と同時に、タイミングプーリ30がタイミングベルト23bとの間の摩擦に抗して図示矢印方向(正転方向)に回転することから、直進アームモジュール2によりアーム52の先端部が−Z方向に移動する。これに伴って、アーム52の先端部が図示矢印方向に斜めに移動することになる。
【0041】
駆動パターン8においては、ステッピングモータ10bが駆動されず、ステッピングモ
ータ10aが図示矢印方向(反転方向)に駆動される。この場合、タイミングベルト23aのみが走行していることから、タイミングプーリ30がタイミングベルト23bとの間の摩擦に抗してX方向に直進アームモジュール2とともに移動する。と同時に、タイミングプーリ30がタイミングベルト23bとの間の摩擦に抗して図示矢印方向(反転方向)に回転することから、直進アームモジュール2によりアーム52の先端部がZ方向に移動する。これに伴って、アーム52の先端部が図示矢印方向に斜めに移動することになる。
【0042】
上記した駆動パターン1〜8は典型例を示したものであるが、ステッピングモータ10
a、10bの速度比及び各回転方向等を上記コントローラにより微細制御することにより
アーム52の先端部を図3に示すようにX−Z平面上を任意に移動させることが可能にな
る。また、チャック53の開閉を併せて制御すると、図外の部品等がチャック53により
把持され、同部品等をX−Z平面上を自由に移動させることが可能になる。
【0043】
ピックアンドプレース装置Aは図1に示すように構造が非常にシンプルであり、従来例
に比べて部品点数が少ない。ステッピングモータ10a、10bの回転運動をアーム52の直線運動に変換する機構上、機械的な損失が小さい。直進アームモジュール2にモータ等の駆動源が設けられていないことから可動部分の重量が軽い。よって、装置自体の小型軽量化、高速駆動化及び低コスト化を図ることが可能になった。しかもアーム52等を駆動させる駆動源がステッピングモータ10aとステッピングモータ10bに分散されており、この点で装置のレイアウトがシンプルになり、メンテナンス向上を図ることも可能になった。また、直進アームモジュール2を直進回転アームモジュール2’に取り替えると、アーム52が直線運動するだけでなく回転運動することから、利用範囲が拡大する。下記の他のアームモジュールに取り替えても同様である。さらに、ステッピングモータ10a、10bの各トルクを合成した動力でアーム52等を各方向へ駆動が行えるため、駆動源を効率的に使う事ができ、この点でも装置の一層の小型化を図ることが可能になる。
【0044】
次に、直進アームモジュール2の代わりにヨーイング回転アームモジュール80を用いた変形例を図5及び図6を参照して説明する。なお、上記例と同一の構成部について原則として同一の部品番号を付して表し、その説明は省略するものとする。
【0045】
ヨーイング回転アームモジュール80については、図5に示すように直線状板材のアーム81と、アーム81の先端部に設けられ且つ部品等を把持可能なチャック82と、アーム81の基端部裏面側に設けられた回転軸83とを有した構成となっている。なお、チャック82、回転軸83は上記例のチャック53、回転軸545と同一機能を有している。
【0046】
ヨーイング回転アームモジュール80は移動機構1のタイミングプーリ30にカップリング3を介して連結され、アーム81がタイミングプーリ30と共に回転するようになっている。アーム81の回転方向を図6中θ方向として表している。
【0047】
ヨーイング回転アームモジュール80を用いたピックアンドプレース装置Aは図6に示す通りであり、以下のような動作となる。図4に示す駆動パターン1、2においてはアーム81の先端部が上記例と同じくX方向、−X方向に移動する。駆動パターン3、4においてはアーム81の先端部が上記例とは異なり−Z方向、Z方向ではなくθ方向、−θ方向に回転する。駆動パターン5〜8においては上記例と同様にX方向の移動とθ方向の回転との組み合わせとなる。
【0048】
次に、ローリング回転アームモジュール90を用いた変形例を図7及び図8を参照して説明する。なお、上記例と同一の構成部について原則として同一の部品番号を付して表し、その説明は省略するものとする。
【0049】
ローリング回転アームモジュール90については、図7に示すように軸ガイド部40のガイドテーブル42に保持可能な接続固定板91と、接続固定板91の表面に沿わせてX方向に向けて配置され且つ軸受台911により軸支されたアーム92と、アーム92の先端部に設けられ且つ部品等を把持可能なチャック93と、タイミングプーリ30の回転運動をアーム92の長さ方向を基軸とした回転運動に変換させる回転変換機構94とを有している。接続固定板91には軸受台911が設けられている他、ガイドテーブル42の各長辺に挟み込んで保持可能な接続固定板912、912が設けられている。なお、接続固定板912、912は、上記例の接続固定板512と同一機能を有している。チャック93は上記例のチャック53と同一機能を有している。
【0050】
回転変換機構94は、アーム92の後端部に設けられたかさ歯車941と、かさ歯車9
41に噛み合っており且つ接続固定板91に軸支されたかさ歯車942と、かさ歯車94
2に連結されたアーム92に対して直交した軸部材であり接続固定板91の裏側から取り
出された回転軸943とを有している。なお、回転軸943は上記例の回転軸545と同
一機能を有している。
【0051】
ローリング回転アームモジュール90は移動機構1のタイミングプーリ30にカップリング3を介して連結され、アーム92がタイミングプーリ30と共に回転するようになっている。アーム92の回転方向を図8中φ方向として表している。
【0052】
直進アームモジュール2の代わりにローリング回転アームモジュール90を用いたピックアンドプレース装置Aは図8に示す通りであり、以下のような動作となる。図4に示す駆動パターン1、2においてはアーム92の先端部が上記例と同じくX方向、−X方向に移動する。駆動パターン3、4においてはアーム92の先端部が上記例とは異なり−Z方向、Z方向ではなくφ方向、−φ方向に回転する。駆動パターン5〜8においては上記例と同様にX方向の移動とφ方向の回転との組み合わせとなる。
【0053】
図1乃至図8に示すピックアンドプレース装置Aにおいて、チャック53、82及び9
3を省略した形態であっても良い。この場合、部品等を把持する機能が失われることから
、ピックアンドプレース装置とは言えず、単に部品等を移動させる移動装置となる。移動装置を活用した応用例について図9を参照して説明する。
【0054】
図9中に示された移動装置Bは、図5及び図6に示されたピックアンドプレース装置A
をベースとし、アーム81からチャック82が省略された装置である。同装置Bに使用さ
れたアームをアーム81’として表している。また、図9中に示されたピックアンドプレ
ース装置Aは、図3に示された直進アームモジュール2を用いた装置である。各装置がコントローラ100により制御されている。ここでは、2台の移動装置Bを利用してワークWをピックアンドプレース装置Aの近くに搬送し、同装置Aを利用してワークWを把持して別の場所に搬送させるようになっている。
【0055】
なお、本発明に係る移動機構については、ピックアンドプレース装置だけの適用に止ま
らず移動対象物を移動させるものであればどのようなものにも適用可能である。第1、第
2の駆動源については、直流モータ、交流モータだけでなく油圧シリンダ等であっても良
い。第1、第2のベルト・プーリについては、第1、第2のベルトが走行可能なように第
1、第2の駆動源に連結された構成である限り、種類や配置等が問われない。移動プーリ
部については、第1のベルトと第2のベルトとの間に配置され且つ第1のベルトと第2の
ベルトが交差するように掛け回されている限り、外周面の歯の有無、滑車の種類やベルトの掛け回し方法が問われない。軸ガイド部については、移動プーリ部を回転可能に軸支するとともに移動プーリ部を直線上に移動自在に案内する構成である限り、その種類等が問われない。移動プーリ部を回転させる必要がないのであれば、軸ガイド部の代わりに、移動プーリ部をベルト方向に直線上に移動自在に案内するガイド部を用いると良い。
【0056】
本発明に係るピックアンドプレース装置については、アーム機構の先端側を単にXーZ
平面上に移動させるのでなく、2台の移動機構を用いてX−Y−Z空間上を移動させる形
態であっても良い。移動機構については上記の通りである。アーム機構については、移動
機構の移動プーリ部に連結され且つ先端側に移動対象物を把持可能な構成である限り、把
持の方法やアームの形状等が問われない。特に、移動プーリ部の回転力を用いることなく
別のモータ等を用いてアームを上下に移動したり、移動プーリ部の回転力を積極的に用い
てチャックを動作させる形態であっても良い。また、アーム機構を移動プーリ部にカップ
リングを用いることなく直接に連結するようにしても良い。さらに、回転駆動部については、アームの先端部だけでなくその全体を回転させる形態であってもかまわない。
【符号の説明】
【0057】
A ピックアンドプレース装置
1 移動機構
10a,10b ステッピングモータ(第1、第2の駆動源)
20a,20b ベルト・プーリ(第1、第2のベルト・プーリ)
21a,21b タイミングプーリ
22a,22b アイドラ
23a,23b タイミングベルト
30 タイミングプーリ(移動プーリ部)
40 軸ガイド部
41 スライドガイド(直線ガイド部)
42 ガイドテーブル(可動部)
43a、43b アイドラ(第1、第2のローラ)
2 直進アームモジュール(アーム機構)
51 モジュール取付板(基台)
52 アーム
53 チャック
54 上下変換機構
2’ 直進回転アームモジュール(アーム機構)
51 モジュール取付板(基台)
52 アーム
53 チャック
54 上下変換機構
55 モータ(回転駆動部)
3 カップリング
80 ヨーイング回転アームモジュール(アーム機構)
81 アーム
82 チャック
83 回転軸
90 ローリング回転アームモジュール(アーム機構)
91 接続固定板(基台)
92 アーム
93 チャック
94 回転変換機構
【特許請求の範囲】
【請求項1】
独立して駆動可能な第1、第2の駆動源と、第1、第2のベルトが走行可能なように第
1、第2の駆動源に連結された第1、第2のベルト・プーリと、第1のベルトと第2のベ
ルトとの間に配置され且つ第1のベルトと第2のベルトが交差するように掛け回された移
動プーリ部と、移動プーリ部を直線上に移動自在に案内するガイド部とを具備したことを特徴とする移動機構。
【請求項2】
請求項1記載の移動機構において、前記ガイド部の代わりに、前記移動プーリ部を回転可能に軸支するとともにベルト方向に直線上に移動自在に案内する軸ガイド部を用いたことを特徴とする移動機構。
【請求項3】
請求項2記載の移動機構において、前記軸ガイド部には、ベルト方向に配置された直線
ガイド部と、前記移動プーリ部を軸支するとともに直線ガイド部に沿って直線移動自在な可動部と、前記第1のベルトの第2のベルト側の一部を移動プーリ部の半周面に掛け回すために同プーリ部の両側にて案内する第1のローラと、前記第2のベルトの第1のベルト側の一部を移動プーリ部の他の半周面に掛け回すために同プーリ部の両側にて案内する第2のローラとを備え、第1、第2のローラは、前記移動プーリ部との間で三角形、逆三角形の位置関係となるように可動部上の当該移動プーリ部を中心とした位置に各々配設されていることを特徴とする移動機構。
【請求項4】
請求項1、2又は3の移動機構と、同機構の移動プーリ部に連結され且つ先端側に移動対象物を把持可能なアーム機構とを具備したことを特徴とするピックアンドプレース装置。
【請求項5】
請求項4記載のピックアンドプレース装置において、前記アーム機構が前記移動プーリ
部に着脱自在になっていることを特徴とするピックアンドプレース装置。
【請求項6】
請求項2の移動機構が用いられた請求項4又は5記載のピックアンドプレース装置にお
いて、前記アーム機構は、前記軸ガイド部の可動部に保持される基台と、先端側に移動対象物を把持可能なアームと、前記移動プーリ部の回転運動をアームのベルト方向に直交した方向の直線運動に変換する上下変換機構とを有していることを特徴とするピックアンドプレース装置。
【請求項7】
請求項2の移動機構が用いられた請求項4又は5記載のピックアンドプレース装置において、前記アーム機構は、前記軸ガイド部の可動部に保持される基台と、先端側に移動対象物を把持可能なアームと、少なくともアームの先端側を回転させる回転駆動部を更に備えていることを特徴とするピックアンドプレース装置。
【請求項8】
請求項2の移動機構が用いられた請求項4又は5記載のピックアンドプレース装置にお
いて、前記アーム機構は、前記軸ガイド部の可動部に保持される基台と、先端側に移動対象物を把持可能なアームと、少なくともアームの先端側を回転させる回転駆動部と、前記移動プーリ部の回転運動をアームのベルト方向に直交した方向の直線運動に変換する上下変換機構とを有していることを特徴とするピックアンドプレース装置。
【請求項9】
請求項2の移動機構が用いられた請求項4又は5記載のピックアンドプレース装置にお
いて、前記アーム機構は、先端側に移動対象物を把持可能なアームを有し、同アームの基端側には前記移動プーリ部に連結可能であり且つ同アームの先端側を揺動させるための回転軸が設けられていることを特徴とするピックアンドプレース装置。
【請求項10】
請求項2の移動機構が用いられた請求項4又は5記載のピックアンドプレース装置にお
いて、前記アーム機構は、前記軸ガイド部の可動部に保持される基台と、先端部に前記移動対象物を把持可能なアームと、前記移動プーリ部の回転運動をアームのその長さ方向を基軸とした回転運動に変換させる回転変換機構とを有していることを特徴とするピックアンドプレース装置。
【請求項1】
独立して駆動可能な第1、第2の駆動源と、第1、第2のベルトが走行可能なように第
1、第2の駆動源に連結された第1、第2のベルト・プーリと、第1のベルトと第2のベ
ルトとの間に配置され且つ第1のベルトと第2のベルトが交差するように掛け回された移
動プーリ部と、移動プーリ部を直線上に移動自在に案内するガイド部とを具備したことを特徴とする移動機構。
【請求項2】
請求項1記載の移動機構において、前記ガイド部の代わりに、前記移動プーリ部を回転可能に軸支するとともにベルト方向に直線上に移動自在に案内する軸ガイド部を用いたことを特徴とする移動機構。
【請求項3】
請求項2記載の移動機構において、前記軸ガイド部には、ベルト方向に配置された直線
ガイド部と、前記移動プーリ部を軸支するとともに直線ガイド部に沿って直線移動自在な可動部と、前記第1のベルトの第2のベルト側の一部を移動プーリ部の半周面に掛け回すために同プーリ部の両側にて案内する第1のローラと、前記第2のベルトの第1のベルト側の一部を移動プーリ部の他の半周面に掛け回すために同プーリ部の両側にて案内する第2のローラとを備え、第1、第2のローラは、前記移動プーリ部との間で三角形、逆三角形の位置関係となるように可動部上の当該移動プーリ部を中心とした位置に各々配設されていることを特徴とする移動機構。
【請求項4】
請求項1、2又は3の移動機構と、同機構の移動プーリ部に連結され且つ先端側に移動対象物を把持可能なアーム機構とを具備したことを特徴とするピックアンドプレース装置。
【請求項5】
請求項4記載のピックアンドプレース装置において、前記アーム機構が前記移動プーリ
部に着脱自在になっていることを特徴とするピックアンドプレース装置。
【請求項6】
請求項2の移動機構が用いられた請求項4又は5記載のピックアンドプレース装置にお
いて、前記アーム機構は、前記軸ガイド部の可動部に保持される基台と、先端側に移動対象物を把持可能なアームと、前記移動プーリ部の回転運動をアームのベルト方向に直交した方向の直線運動に変換する上下変換機構とを有していることを特徴とするピックアンドプレース装置。
【請求項7】
請求項2の移動機構が用いられた請求項4又は5記載のピックアンドプレース装置において、前記アーム機構は、前記軸ガイド部の可動部に保持される基台と、先端側に移動対象物を把持可能なアームと、少なくともアームの先端側を回転させる回転駆動部を更に備えていることを特徴とするピックアンドプレース装置。
【請求項8】
請求項2の移動機構が用いられた請求項4又は5記載のピックアンドプレース装置にお
いて、前記アーム機構は、前記軸ガイド部の可動部に保持される基台と、先端側に移動対象物を把持可能なアームと、少なくともアームの先端側を回転させる回転駆動部と、前記移動プーリ部の回転運動をアームのベルト方向に直交した方向の直線運動に変換する上下変換機構とを有していることを特徴とするピックアンドプレース装置。
【請求項9】
請求項2の移動機構が用いられた請求項4又は5記載のピックアンドプレース装置にお
いて、前記アーム機構は、先端側に移動対象物を把持可能なアームを有し、同アームの基端側には前記移動プーリ部に連結可能であり且つ同アームの先端側を揺動させるための回転軸が設けられていることを特徴とするピックアンドプレース装置。
【請求項10】
請求項2の移動機構が用いられた請求項4又は5記載のピックアンドプレース装置にお
いて、前記アーム機構は、前記軸ガイド部の可動部に保持される基台と、先端部に前記移動対象物を把持可能なアームと、前記移動プーリ部の回転運動をアームのその長さ方向を基軸とした回転運動に変換させる回転変換機構とを有していることを特徴とするピックアンドプレース装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−240444(P2011−240444A)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2010−115387(P2010−115387)
【出願日】平成22年5月19日(2010.5.19)
【出願人】(591124330)マイコム株式会社 (18)
【Fターム(参考)】
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成22年5月19日(2010.5.19)
【出願人】(591124330)マイコム株式会社 (18)
【Fターム(参考)】
[ Back to top ]