
移動無線ネットワークにおける動的な測位要求処理
【課題】移動局の位置決定を強化する、移動無線ネットワークにおける動的な測位要求処理を提供する。
【解決手段】ネットワーク正確度と、ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択することと、ネットワークにおいて、選択された正確度およびネットワーク応答時間を具備する測位要求メッセージ120を送信することと、および、測位要求メッセージに応じる位置データを具備する測位応答メッセージ122を受信する。
【解決手段】ネットワーク正確度と、ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択することと、ネットワークにおいて、選択された正確度およびネットワーク応答時間を具備する測位要求メッセージ120を送信することと、および、測位要求メッセージに応じる位置データを具備する測位応答メッセージ122を受信する。
【発明の詳細な説明】
【関連出願の参照】
【0001】
本件出願は、米国特許法119条(e)に基づいて、2007年9月11日付けの「GSM (登録商標)Control Plane Positioning Preemption RRLP Implementation for MS and SMLC」という名称の米国仮出願第60/971,453号(代理人文書番号072346P1)および2007年12月6日付けの「GSM Control Plane Positioning Preemption RRLP Implementation for MS and SMLC」という名称の米国仮出願第61/012,039号(代理人文書番号072346P2)を基礎として優先権を主張するものであって、これらの米国仮出願の開示は、その全体が参照によって本件出願の明細書に明白に組み込まれている。
【技術分野】
【0002】
本件発明は、一般に通信システムに関係し、より詳細には、全地球航法衛星システムを使用する位置決定を強化することに関係する。
【背景技術】
【0003】
移動局(例えば、セルラー電話)の位置を知ることは、しばしば望ましく、時には必要である。英語の「location(位置、位置決め)」および「position(位置)」という用語は、同義語であり、本件明細書では区別することなく使用される。例えば、ユーザーは、移動局(MS)を利用してウェブサイトをブラウジングし、位置に敏感なコンテンツをクリックする。そうすると、移動局の位置が決定され、その位置がユーザーに適切なコンテンツを提供するために使用される。移動局の位置を知っていることが有用または必要となる場面が他にも多くある。例えば、FCCの911命令は、911救急サービス・コールをしている移動局を地理的に探し当てることを含む強化された911サービスを提供するよう通信事業者に要求する。移動局は、ホーム・ネットワークから位置決めサービスを得ることができるように、および訪れたネットワーク内でローミングする間にも位置決めサービスを得ることができるように、備えられることができる。移動局は、必要なときにいつでも移動局の位置を決定するためにホーム・ネットワーク内の様々なネットワーク・エンティティと通信することができる。
【0004】
ワイヤレス・ネットワーク内の移動局の位置を計算するために様々な異なるタイプの技術が採用されるが、成功レベルおよび正確度はまちまちである。ネットワーク・ベースの方法は、少なくとも2つの塔を使用する到着角度(AOA)、マルチラテレーション(multilateration)を使用する到着時差(TDOA)、および移動局が既知の位置で示すRFパターンをマッチングするためのRFフィンガープリンティングを使用する位置署名を含んでいる。様々な移動局ベースの方法は、GPS、A-FLT(Advanced Forward Link Trilateration)、TA/NMR(Timing Advance/Network Measurement Report)および/またはE-OTD(Enhanced Observed Time Difference)を組み込んでいる。
【0005】
もう1つの移動局ベースの方法は、支援型GPS(A-GPS)である。A-GPSでは、移動局が、低い初期位置算出時間(TTFF)を有し、弱い信号の獲得を許可し、および移動局のバッテリー使用を最適化するために、サーバーは、移動局に支援データを提供する。A-GPSは、範囲のようなものの測定を提供する他の測位技術と分離または混成した位置決め技術として使用される。A-GPSサーバーは、ワイヤレス移動局に移動局のおおよその位置に特有のデータを提供する。支援データは、移動局が衛星に速くロックオンすることを支援し、潜在的には、ハンドセットが弱い信号にロックオンすることを可能にする。移動局は、その後、位置計算を行なうか、または位置計算を行うためにサーバーへ測定コード位相を選択的に戻す。A-GPSサーバーは、そのような位置計算を行なうことができない場合、例えば、GPS衛星が十分見えない場合、位置計算のためにセルラー基地局から移動局までの往復タイミング測定のような追加情報を使用することができる。
【0006】
衛星ベースの全地球測位システム(GPS)、タイミング・アドバンス(TA)、および地球上ベースのE-OTD(Enhanced Observed Time Difference)の位置決定技術の進歩は、移動局の地理的位置(例えば、緯度および軽度)の厳密な決定を可能にする。ワイヤレス通信ネットワーク内は地理的位置決めサービスが展開されているので、そのような位置情報は、ネットワーク・エレメントに記憶され、シグナリング・メッセージを使用してネットワーク内のノードに配信されてもよい。そのような情報は、サービング・モバイル位置決めセンター(SMLC)、独立型SMLC(SAS)、位置決定エンティティ(PDE)、安全なユーザー・プレーン位置決めプラットフォーム(SLP)および特別な目的の移動加入者位置決めデータベースに記憶されてもよい。
【0007】
特殊目的のモバイル加入者位置決めデータベースの1つの例は、第3世代パートナーシップ・プロジェクト(3GPP)によって提案されたSMLCである。特に、3GPPは、SMLCへおよびSMLCからモバイル加入者位置情報を通信するためのシグナリング・プロトコルを定義している。このシグナリング・プロトコルは、無線資源LCS(位置決めサービス)プロトコルと呼ばれ、RRLPと表記され、およびモバイル加入者の位置に関係したSMLCと移動局との間で通信されるシグナリング・メッセージを定義する。RRLPプロトコルの詳細な説明は、3GPPのTS44.031 v7.9.0(2008-06)3世代パートナーシップ・プロジェクト:技術的規格グループGSMエッジ無線接続ネットワーク:位置決めサービス(LCS):移動局(MS)−サービング・モバイル位置決めセンター(SMLC)無線資源LCSプロトコル(RRLP)(第7版)に記載されている。
【0008】
米国の全地球測位システム(GPS)に加えて、ロシアのGLONASSシステム、またはヨーロッパのガリレオ・システム計画のような他の衛星測位システム(SPS)もまた、移動局の位置決めのために使用されることができる。しかしながら、各々のシステムは、異なる規格にしたがって作動する。
【0009】
衛星ベースの位置決めシステムの1つの弱みは、正確な位置決定を獲得するためにかかる時間である。典型的に、位置の正確度は、その計算速度のためにトレードオフされ、逆に計算速度を上げようとすると位置の正確度が犠牲にされる。すなわち、より正確な位置決定にはより多くの時間がかかる。したがって、強化された正確度を含む位置決めのためにさらなる効率性および利点を提供するために2つ以上の衛星から送られる衛星信号に基づいて移動局の位置を決定することができる全地球ナビゲーション衛星システム(GNSS)を含む通信システムに対するニーズがある。例えば、救急サービス(ES)コールまたは付加価値サービス(VAS)セッションの間に、獲得スピードまたは移動局の位置決定を獲得する最終的な獲得時間を害することなく正確度を強化するというニーズがある。
【発明の概要】
【0010】
本件発明のいくつかの実施形態は、ワイヤレス・ネットワーク内の移動局の位置データを強化する方法を提供する。前記方法は、移動局において、ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを受信することと、前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択することと、前記選択された正確度を使用して前記移動局の位置データを決定することと、測位要求メッセージに応じる測位応答メッセージを形成することと、ここにおいて、前記測位応答メッセージは、前記位置データを具備する、前記測位応答メッセージを送信することとを具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記方法。前記暫定的正確度が100メートルを超える不確実度を表わす前記方法。前記暫定的正確度がネットワーク正確度よりも高い正確度を表わす前記方法。前記暫定的正確度が10メートルよりも低い不確実度を表わす前記方法。前記暫定的正確度が0メートルの不確実度を表わす前記方法。前記選択する動作が、リビッドが以前に生じたかどうかを決定することを具備する前記方法。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記方法。前記応答メッセージがRRLP測位応答メッセージを具備する前記方法。
【0011】
本件発明のいくつかの実施形態は、ワイヤレス・ネットワーク内の移動局の位置データを強化する方法を提供する。前記方法は、ネットワークにおいて、ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択することと、前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを送信することと、および前記測位要求メッセージに応じる測位応答メッセージを受信することと、ここにおいて、前記測位応答メッセージは、位置データを具備する、を具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記方法。前記暫定的正確度が100メートルを超える長さの不確実度を表わす前記方法。前記暫定的正確度がネットワーク正確度より高い正確度を表わす前記方法。前記暫定的正確度が10メートルよりも低い不確実度を表わす前記方法。前記暫定的正確度が0メートルの不確実度を表わす前記方法。前記選択する動作が、リビッドが以前に生じたかどうかに基づいて、選択された正確度を決定することを具備する前記方法。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記方法。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記方法。
【0012】
本件発明のいくつかの実施形態は、ワイヤレス・ネットワーク内の移動局の位置データを強化するための移動局を提供する。前記移動局は、ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを受信するための受信機と、前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択するための論理と、前記選択された正確度を使用して前記移動局の位置データを決定するための位置決めエンジンと、前記測位要求メッセージに応じる測位応答メッセージを形成するための論理であって、前記測位応答メッセージは、前記位置データを具備する、論理と、前記測位応答メッセージを送信するための送信機とを具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記移動局。前記暫定的正確度がネットワーク正確度より高い正確度を表わす前記移動局。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記移動局。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記移動局。
【0013】
本件発明のいくつかの実施形態は、ワイヤレス・ネットワーク内の移動局の位置データを強化させるためのネットワークを提供する。前記ネットワークは、ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択するための論理と、前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを送信するための送信機と、および前記測位要求メッセージに応じる測位応答メッセージを受信するための受信機であって、前記測位応答メッセージは、位置データを具備する、受信機とを具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記ネットワーク。前記暫定的正確度がネットワーク正確度より高い正確度を表わす前記ネットワーク。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記方法。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記方法。
【0014】
本件発明のいくつかの実施形態は、ワイヤレス・ネットワーク内の移動局の位置データを強化するための移動局を提供する。前記移動局は、ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを受信する手段と、前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択するための手段と、前記選択された正確度を使用して前記移動局の位置データを決定する手段と、前記測位要求メッセージに応じる測位応答メッセージを形成する手段であって、前記測位応答メッセージは、前記位置データを具備する、手段と、前記測位応答メッセージを送信する手段とを具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記移動局。前記暫定的正確度がネットワーク正確度より高い正確度を表わす前記移動局。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記移動局。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記移動局。
【0015】
本件発明のいくつかの実施形態は、ワイヤレス・ネットワーク内の移動局の位置データを強化するためのネットワークを提供する。前記ネットワークは、ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択する手段と、前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを送信する手段と、および前記測位要求メッセージに応じる測位応答メッセージを受信する手段であって、前記測位応答メッセージは、位置データを具備する、手段とを具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記ネットワーク。前記暫定的正確度がネットワーク正確度より高い正確度を表わす前記ネットワーク。前記選択する手段が、リビッドが以前に生じたかどうかに基づいて、選択される正確度を決定する手段を具備する前記ネットワーク。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記ネットワーク。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記ネットワーク。
【0016】
本件発明のいくつかの実施形態は、以下のものを具備するコンピューター可読媒体を具備するコンピューター可読プロダクトを提供する。前記コンピューター可読媒体は、ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを少なくとも1つのコンピューターに受信させるためのコードと、前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を少なくとも1つのコンピューターに選択させるためのコードと、前記選択された正確度を使用して前記移動局の位置データを少なくとも1つのコンピューターに決定させるためのコードと、前記測位要求メッセージに応じる測位応答メッセージを少なくとも1つのコンピューターに形成させるためのコードであって、前記測位応答メッセージは、前記位置データを具備する、コードと、前記測位応答メッセージを少なくとも1つのコンピューターに送信させるためのコードとを具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記コンピューター可読プロダクト。前記暫定的正確度がネットワーク正確度より高い正確度を表わす前記コンピューター可読プロダクト。前記選択された正確度を使用して移動局の位置データを少なくとも1つのコンピューターに決定させるためのコードが、リビッドが以前に生じたかどうかを少なくとも1つのコンピューターに決定させるためのコードを具備する前記コンピューター可読プロダクト。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記コンピューター可読プロダクト。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記コンピューター可読プロダクト。
【0017】
本件発明のいくつかの実施形態は、以下のものを具備するコンピューター可読媒体を具備するコンピューター可読プロダクトを提供する。前記コンピューター可読媒体は、ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を少なくとも1つのコンピューターに選択させるためのコードと、前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを少なくとも1つのコンピューターに送信させるためのコードと、および前記測位要求メッセージに応じる測位応答メッセージを少なくとも1つのコンピューターに受信させるためのコードであって、前記測位応答メッセージは、位置データを具備する、コードとを具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記コンピューター可読プロダクト。前記暫定的正確度がネットワーク正確度より高い正確度を表わす前記コンピューター可読プロダクト。前記ネットワーク正確度と、ネットワーク正確度とは異なる暫定的正確度との間の正確度を少なくとも1つのコンピューターに選択させるためのコードが、リビットが以前に生じたかどうかに基づいて、選択された正確度を少なくとも1つのコンピューターに決定させるためのコードを具備する、前記コンピューター可読プロダクト。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記コンピューター可読プロダクト。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記コンピューター可読プロダクト。ワイヤレス・ネットワーク内のネットワークと移動局との間の測位要求メッセージのリビットを低減する方法であって、前記方法は、所定の時間まで待つことと、ここにおいて、前記所定の時間は、位置データが必要とされる時間に基づく、前記所定の時間に、ネットワーク応答時間およびネットワーク正確度を具備する測位要求メッセージを送信することと、および前記位置データが必要とされる前に、前記位置データを具備する測位応答メッセージを受信することとを具備する。前記ネットワーク応答時間が4秒より長くない短縮された応答時間を表わす前記方法。前記ネットワーク正確度が100メートルよりも多い低い正確度を表わす値を具備する前記方法。前記測位要求が支援データを具備しない前記方法。支援データ・メッセージを送信することと、および支援データAckメッセージを受信することとをさらに具備する前記方法。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記方法。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記方法。
【0018】
本件発明のこれらおよびその他の態様、特徴および利点は、以下で説明される実施形態の参照により明白になるだろう。
【図面の簡単な説明】
【0019】
本件発明の実施形態は、図面を参照して、例のみとして説明される。
【図1A】図1Aは、ワイヤレス・ネットワーク内の様々なコンポーネントおよびインターフェースを示している。
【図1B】図1Bは、ワイヤレス・ネットワーク内の様々なコンポーネントおよびインターフェースを示している。
【図1C】図1Cは、ワイヤレス・ネットワーク内の様々なコンポーネントおよびインターフェースを示している。
【図2】図2は、RRLPセッションを使用する典型的な位置決めプロセスのメッセージ・フローを示している。
【図3】図3は、支援データの擬似セグメント化を示している。
【図4】図4は、MSが追加のRRメッセージを受信することに基づいて位置決定を一時停止することを例示している。
【図5】図5は、MSが追加のRRメッセージを受信することに基づいて位置決定を一時停止することを例示している。
【図6】図6は、本件発明の実施形態にしたがって、GPSエンジンを始動およびシャットダウンするイベントを示している。
【図7】図7は、本件発明の実施形態にしたがって、GPSエンジンを始動およびシャットダウンするイベントを示している。
【図8】図8は、本件発明の実施形態にしたがって、早めの位置決定を強調表示するメッセージ・フローを示している。
【図9】図9は、本件発明の実施形態にしたがって、追加のRRメッセージが受信された後に位置決定を継続する方法を例示している。
【図10】図10は、本件発明の実施形態にしたがって、追加のRRメッセージが受信された後に位置決定を継続する方法を例示している。
【図11】図11は、本件発明の実施形態にしたがって、ダウンロードされた支援データを最適に配列する方法を例示している。
【図12】図12は、本件発明の実施形態にしたがって、ダウンロードされた支援データを最適に配列する方法を例示している。
【図13】図13は、本件発明の実施形態にしたがって、ジャスト・イン・タイムの位置要求を送る方法を示している。
【図14】図14は、本件発明の実施形態にしたがって、ジャスト・イン・タイムの位置要求を送る方法を示している。
【図15】図15は、本件発明の実施形態にしたがって、アボイドされるセッションを回避するために新しいRRメッセージを遅らせる(または、落とす)方法を示している。
【図16】図16は、本件発明の実施形態にしたがって、アボイドされるセッションを回避するために新しいRRメッセージを遅らせる(または、落とす)方法を示している。
【図17】図17は、本件発明の実施形態にしたがって、救急サービス(ES)コールにおける応答時間と正確度とのバランスを図るために正確なパラメーターを変える方法を例示する。
【図18】図18は、本件発明の実施形態にしたがって、救急サービス(ES)コールにおける応答時間と正確度とのバランスを図るために正確なパラメーターを変える方法を例示する。
【図19】図19は、本件発明の実施形態にしたがって、救急サービス(ES)コールにおける応答時間と正確度とのバランスを図るために正確なパラメーターを変える方法を例示する。
【図20】図20は、本件発明の実施形態にしたがって、救急サービス(ES)コールにおける応答時間と正確度とのバランスを図るために正確なパラメーターを変える方法を例示する。
【図21】図21は、本件発明の実施形態にしたがって、救急サービス(ES)コールにおける応答時間と正確度とのバランスを図るために正確なパラメーターを変える方法を例示する。
【図22】図22は、本件発明の実施形態にしたがって、付加価値サービス(VAS)のためのメッセージ・フローを示している。
【発明の詳細な説明】
【0020】
以下の説明において、本件発明の様々な実施形態を例示する添付の図面への言及がなされる。他の実施形態が利用されてもよく、本件開示の要旨および範囲から逸脱することなく機械的、構成上、構造上、電気的、および操作上の変更がなされてもよいことが理解される。以下の詳細な説明は、制限的意味で捉えられるべきではない。さらに、以下の詳細な説明のいくつかの部分は、電子回路またはコンピューター・メモリーにおいて行なわれることができる、手順、ステップ、論理ブロック、処理、およびデータビット上のオペレーションの他のシンボリック表現の観点で提供される。
【0021】
手順、コンピューター実行ステップ、論理ブロック、プロセスなどは、本件明細書において、所望の結果に至る自己矛盾のない一連のステップまたは命令となるよう考えられている。前記ステップは、物理的数量の物理的操作を利用するステップである。これらの数量は、電子回路またはコンピューター・システムにおいて記憶、送信、結合、比較、およびその他の場合操作されることができる電気、磁気、または無線信号の形式をとってもよい。これらの信号は、ビット、値、エレメント、シンボル、文字、用語、数字などと時々呼ばれてもよい。各々のステップは、ハードウェア、ソフトウェア、ファームウェア、またはそれらの組み合わせによって行われてもよい。ハードウェア実装において、例えば、処理ユニットは、1つまたは複数の特定用途集積回路(ASIC)、デジタル信号プロセッサー(DPS)、デジタル信号処理デバイス(DSP)、プログラム可能な論理デバイス(PLD)、フィールド・プログラム可能なゲート・アレー(FPGA)、プロセッサー、コントローラー、マイクロ・コントローラー、マイクロプロセッサー、電子デバイス、本件明細書において説明される機能を行なうように設計された他のデバイス・ユニット、および/またはそれらの組み合わせにおいて実装されてもよい。
【0022】
この発明の詳細な説明の全体にわたって、「1つの例」、「1つの特徴」、「ある例」、または「ある特徴」に関してなされる言及は、特徴および/または例に関係して説明される特定の特徴、構造、または特性が特許請求の範囲の主題の少なくとも1つの特徴および/または例に含まれる、ということを意味する。したがって、本件発明の詳細な説明の全体にわたって様々な箇所で使用されている「1つの例において」、「ある例」、「1つの特徴において」、または「ある特徴」というフレーズがすべて同じ特徴および/または例に関して言及している必要はない。さらに、特定の特徴、構造、または特性は、1つまたは複数の例および/または特徴に組み込まれてもよい。
【0023】
本件明細書において「命令」と呼ばれる用語は、1つまたは複数の論理操作を表わす表現に関係する。例えば、命令は、1つまたは複数のデータ・オブジェクト上で1つまたは複数のオペレーションを実行するための機械によって解釈可能であることにより「機械可読」であってもよい。しかしながら、これは、命令の単なる例であり、特許請求の範囲の主題は、この点で制限されない。他の例において、本件明細書において言及される命令は、符号化されたコマンドを含むコマンド・セットを有する処理回路によって実行可能である符号化されたコマンドに関係してもよい。そのような命令は、処理回路によって理解される機械言語の形式で符号化されてもよい。改めて、これらは、命令の単なる例であり、特許請求の範囲の主題は、この点で制限されない。
【0024】
本件明細書において言及される「記憶媒体」は、1つまたは複数の機械によって認識可能である表現を保つことができる物理的メディアに関係する。例えば、記憶媒体は、機械可読命令および/または情報を記憶するための1つまたは複数の記憶装置を具備してもよい。そのような記憶装置は、例えば、磁気、光学、または半導体記憶媒体を含む様々なメディア・タイプのいずれか1つを具備してもよい。そのような記憶媒体はまた、長期間、短期間、揮発性または非揮発性メモリー装置の任意のタイプを具備してもよい。しかしながら、これらは、記憶媒体の単なる例であり、特許請求の範囲の主題は、これらの点で制限されない。「記憶媒体」という用語は、真空状態には適用されない。
【0025】
特にことわりのないかぎり、以下の議論から明白であるように、「処理する(processing)」、「算出する(computing)」、「計算する(calculating)」、「選択する(selecting)」、「形成する(forming)」、「イネーブルにする(enabling)」、「禁止する(inhibiting)」、「位置を探す(locating)」、「終了する(terminating)」、「識別する(identifying)」、「開始する(initiating)」、「検出する(detecting)」、「獲得する(obtaining)」、「ホスティングする(hosting)」、「維持する(maintaining)」、「表示する(representing)」、「推定する(estimating)」、「受信する(receiving)」、「送信する(transmitting)」、「決定する(determining)」および/または同様の用語のような本件詳細な説明の全体を通して利用される用語は、物理的電子および/または磁気的数量および/またはコンピューティング・プラットフォームのプロセッサー、メモリー、レジスター、および/または他の情報記憶、送信、受信および/またはディスプレイ装置内の物理的数量として表わされるデータを操作するおよび/または変換するコンピューターまたは同様の電子計算装置のようなコンピューティング・プラットフォームによって行われることができるアクションおよび/またはプロセスをさすものとすることが認識される。そのようなアクションおよび/またはプロセスは、例えば、記憶媒体に記憶される機械可読命令の制御の下でコンピューティング・プラットフォームによって実行されてもよい。そのような機械可読命令は、例えば、コンピューティング・プラットフォームの一部として含まれる(例えば、処理回路またはそのような処理回路の外部の一部として含まれる)記憶媒体に記憶されるソフトウェアまたはファームウェアを具備してもよい。さらに、特にことわりのない限り、フロー図への言及があろうとなかろうと、本件明細書において説明されるプロセスはまた、そのようなコンピューティング・プラットフォームによってすべてまたは部分的に実行および/または制御されてもよい。
【0026】
本件明細書において説明されるワイヤレス通信技術は、ワイヤレス・ワイド・エリア・ネットワーク(WWAN)、ワイヤレス・ローカル・エリア・ネットワーク(WLAN)、ワイヤレス・パーソナル・エリア・ネットワーク(WPAN)などのような様々なワイヤレス通信ネットワークに関係していてもよい。「ネットワーク」および「システム」という用語は、本件明細書において区別なく使用されてもよい。WWANは、符号分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直行周波数分割多元接続(OFDM)ネットワーク、単一搬送波周波数分割多元接続(SC-FDMA)ネットワークなどであってもよい。CDMAネットワークは、いくつかの無線技術を挙げると、cdma2000または広帯域CDMA(W-CDMA)のような1つまたは複数の無線接続技術(RAT)を実装してもよい。ここで、cdma2000は、IS-95、IS-2000、およびIS-856標準にしたがって実装される技術を含んでもよい。TDMAネットワークは、移動通信のためのグローバル・システム(GSM)、デジタル・アドバンスド移動電話システム(D-AMPS)、またはいくつかの他のRATを実装してもよい。GSMおよびW-CDMAは、「第3世代パートナーシップ・プロジェクト」(3GPP)という名称の企業共同体からの文献において説明されている。cdma2000は、「第3世代パートナーシップ・プロジェクト2」(3GPP2)という名称の企業共同体からの文献において説明されている。3GPPおよび3GPP2の文献は、公に利用可能である。例えば、WLANは、IEEE802.11xネットワークを具備してもよく、およびWPANは、ブルートゥース・ネットワーク、IEEE802.15xを具備してもよい。本件明細書において説明されるワイヤレス通信実装はまた、WWAN、WLANおよび/またはWPANの任意の組み合わせに関係して使用されてもよい。
【0027】
デバイスおよび/またはシステムは、衛星から受信した信号に少なくとも部分的に基づいてデバイスの位置を推定してもよい。特に、そのようなデバイスおよび/またはシステムは、関連する衛星とナビゲーション衛星受信機との間の距離の近似を具備する「擬似範囲」測定を得ることができる。特定の例において、そのような擬似範囲は、衛星測位システム(SPS)の一部として1つまたは複数の衛星からの信号を処理することができる受信機において決定されてもよい。そのようなSPSは、いくつか例を挙げると、例えば、全地球測位システム(GPS)、ガリレオ、グロナス(Glonass)、または今後開発される任意のSPSを具備してもよい。その位置を決定するために、衛星ナビゲーション受信機は、3つ以上の衛星の送信時の位置のみならず、それらに関する擬似範囲をも得ることができる。衛星の軌道パラメーターを知っていると、いかなる時点についてもこれらの位置が計算されることができる。擬似範囲の測定は、その後、衛星から受信機までの、信号が移動する時間掛ける光の速度に少なくとも部分的に基づいて決定されてもよい。本件明細書において説明される技術は、特定の例としてSPSのGPSのタイプおよび/またはガリレオタイプで決定される位置決め実装として提供されてもよいが、これらの技術は、SPSの他のタイプに適用されてもよく、および特許請求の範囲の主題は、この点で制限されないことが理解されるべきである。
【0028】
本件明細書において説明される技術は、例えば、前述のSPSを含むいくつかのSPSのいずれか1つにより使用されてもよい。さらに、そのような技術は、擬似衛星または衛星と擬似衛星との組み合わせを利用する測位決定システムにより使用されてもよい。擬似衛星は、擬似ランダム雑音(PRN)符号またはL帯域(または他の周波数)搬送波信号上で変調される他の範囲符号(例えば、GPSまたはCDMAセルラー信号と同様)をブロードキャストする地上ベースの送信機を具備してもよい。それは、GPS時間と同期されてもよい。そのような送信機は、遠隔受信機による識別を可能とするように固有のPRN符号を割り当てられてもよい。擬似衛星は、トンネル、鉱山、建物、都会の峡谷または他の閉鎖されたエリアのような軌道衛星からのSPS信号が利用不能でありうる状況において役立つかもしれない。擬似衛星の他の実装は、ラジオビーコンとして知られている。本件明細書において使用されているような「衛星」という用語は、擬似衛星、擬似衛星の同等物、およびもしかすると他の物を含むよう意図される。本件明細書において使用されているような「SPS信号」という用語は、擬似衛星または擬似衛星の同等物からのSPSのような信号を含むよう意図される。
【0029】
本件明細書において使用されるように、携帯移動装置または移動局(MS)は、時間ごとに変化する位置を有しうるデバイスのことを言う。位置の変化は、いくつかの例として、方向、距離、交信角度などについての変化を具備してもよい。特定の例において、移動局は、セルラー電話、ワイヤレス通信装置、ユーザー設備、ラップトップ・コンピューター、その他のパーソナル通信システム(PCS)装置、および/またはその他の携帯通信装置を具備してもよい。移動局はまた、機械可読命令によって制御される実行機能に適合させられるプロセッサーおよび/またはコンピューティング・プラットフォームを具備してもよい。
【0030】
本件出願は、以下の出願に関係している。各々の出願は、本件出願と時を同じくして出願されており、およびそれらの全体が本件明細書に含まれている。それらの出願は、Kirk Allan Burroughsによる出願「Optimized Ordering of Assistance Data in a Mobile Radio Network」(代理人文書番号072346)、Thomas Rowlandによる出願「Improve GPS Yield For Emergency Calls in a Mobile Radio Network」(代理人文書番号080114)、およびKirk Allan Burroughsによる出願「Delayed Radio Resource Signaling in a Mobile Radio Network」(代理人文書番号080152)である。
【0031】
図1A、1B、および1Cは、ワイヤレス・ネットワークにおける様々なコンポーネントおよびインターフェースを図示する。単純性のために、以下の説明では、ワイヤレス・ネットワークにおいて使用される一般的な用語または特有の標準に関して使用される特有の用語を使用するが、本件明細書において説明される技術は、いくつかの異なるワイヤレス・ネットワーク標準に適用可能であってもよい。例えば、そのようなワイヤレス・ネットワークは、クァルコム社によって開拓され、商業的に開発された大容量デジタル・ワイヤレス技術である符号分割多元接続(CDMA)システムを含む。他のワイヤレス・ネットワークは、代替的デジタル・ワイヤレス技術を使用した移動通信のためのグローバル・システム(GSM)を含む。さらに、他のワイヤレス・ネットワークは、次の世代の大容量デジタル・ワイヤレス技術であるユニバーサル・モバイル電話サービス(UMTS)を含む。
【0032】
図1Aは、移動局(MS10)、基地送受信機局(BTS22)および基地局コントローラー(BSC24)を含む基地局サブシステム(BSS20)、モバイル交換センター(MSC30)、公衆交換電話ネットワーク(PSTN)およびサービング・モバイル位置決めセンター(SMLC)を含む。MS10は、1つまたは複数の基地局と通信するための基地帯域モデムを有するセル電話のような任意の移動ワイヤレス通信である。本件開示において参照されるMSは、位置決定能力を提供するために、GPS受信機または同等の受信機を含む。以下において使用されるGPSという用語は、衛星または擬似衛星システムを意味するよう包括的な意味で使用される。MS10およびBTS22は、Umインターフェースと呼ばれるRF空間インターフェース上でワイヤレスに通信する。1つまたは複数のMS10は、一度にBTS22またはBSS20と通信してもよい。BSS20の内部において、BTS22は、Abisインターフェース上でBSC24に通信してもよい。1つのBSC24は、配信されたネットワーク内でいくつかのBTS22をサポートしてもよい。ここにおいて、ネットワーク(ダウンリンク)からおよびMS10(アップリンク)からのUm空間インターフェース・メッセージを参照するとき、これらのメッセージは、BTS22を使用して通信されている、または同等にBSS20を使用して通信されていると呼ばれてもよい。Lbインターフェースは、BSC24をSMLC50と結合する。Lbインターフェース・ダウンリンクおよびアップリンク・メッセージを参照するとき、これらのメッセージは、BSC24を使用して通信されている、または同等にBSS20を使用して通信されていると呼ばれてもよい。1つまたは複数のBSC24および/またはBSS20は、インターフェースAを使用してMSC30に結合されてもよい。MSC30は、音声コールを公衆ネットワークに提供するためにPSTN40からMS10への交換回路を接続する。その他のネットワーク・エレメントまたはネットワーク・コンポーネントは、他のサービスを提供するためにBSS20、MSC30、およびPSTN40に接続されてもよい。
【0033】
例えば、SMLC50は、位置決めサービスを提供するためにネットワークに結合されてもよく、およびLbインターフェース上でBSC24に接続されて図示されている。SMLC50はまた、MSC30およびLsインターフェースを介してワイヤレス・ネットワークに接続されてもよい。SMLC50は、移動局を探し出すための全体的な連携を提供し、および最終的に推定される位置および推定される達成された正確度を計算することができる。SMLC50は、CDMAネットワーク内の位置決定エンティティ(PDE)、GSMネットワーク内のサービング・モバイル位置決めセンター(SMLC)、およびWCDMAセルラー・ネットワーク内の独立の(A-GPS)SMLC(SAS)と呼ばれてもよい測位サーバーを一般的に意味するよう本件明細書において使用される。
【0034】
典型的に、測位サーバーは、GPSに関係する情報をMSと交換することができる1つまたは複数のGPS基準受信機と一緒に働くワイヤレス・ネットワーク内のシステム源(例えば、サーバー)である。MS支援されたA-GPSセッションにおいて、測位サーバーは、信号獲得プロセスを強化するためにMSへGPS支援データを送る。MSは、測位サーバーに擬似範囲測定を返してもよく、その後、測位サーバーは、MSの位置を計算することができる。代替的に、MSベースのA-GPSセッションにおいて、MSは、測位サーバーに計算した位置の結果を送り返す。
【0035】
図1Bは、UmおよびLbインターフェースの階層型モデルを図示する。MS10(ターゲットMS)における層は、物理層、層1またはL1と呼ばれる第1の層、L2(LAPDm)と呼ばれる第2の層、GSM04.08仕様の後にモデル化された無線資源(RR)層とよばれる第3の層、および最後にアプリケーション層を含む。この場合、アプリケーション層は、GSM04.31およびGSM04.35勧告において定義されている無線資源位置決めプロトコル(RRLP)である。BSS20(BSC24として図示されている)は、BSS20を通り抜けるRRLPメッセージと対応する、L1、L2(LAPD)およびRR層を含む階層型モデルを有する。BSS20は、Lbインターフェース上でSMLC50に要求されるような低域層を中継する。前記層は、SMLC50内のMTP、SCCP、BSSLAP-LE、およびBSSLAP層に対応するMTP、SCCP、BSSLAP-LEおよびBSSLAP層を含む。BSSAP-LEおよびBSSLAPインターフェースに関する追加の情報については、GSM09.21およびGSM08.71勧告を参照せよ。
【0036】
ネットワーク・エレメントからネットワーク・エレメントへ通過するメッセージは、複数の異なるインターフェースおよび対応するプロトコルを通り抜けてもよい。例えば、測位サーバーSMLC50からBSS20を通ってMS10へ通過するメッセージは、Lbインターフェースでは第1のメッセージとして、Abisインターフェースではもしかすると他のメッセージとして、およびUmインターフェースでは最後のメッセージとして通信される。一般に、本件開示において、メッセージは、簡単化のために、そのアプリケーション層および空間インターフェースの名前で呼ばれるであろう。例えば、測位サーバーSMLC50からMS10に向けられる要求は、RRLP測位要求の空間インターフェースUmアプリケーション層の名前で呼ばれてもよい。追加的に、明確にするために、BSS20およびSMLC50は、集合的にネットワーク70と呼ばれてもよく、ネットワーク70は、BTS22、BSC24およびSMLC50を含んでもよく、またはBSS20およびSMLC50を含んでもよい。
【0037】
図1Cは、通常のRRLPセッションのメッセージ・フローを示している。時間aにおいて、SMLC50は、Lbインターフェースを通ってBSS20に要求メッセージ80を送る。BSS20は、Um空間インターフェースを通ってMS10に送信されるRRLP要求85としてこの要求を再パッケージ化し、転送する。内的に、MS10は、RRLPセッションを開始し、およびRRLP応答メッセージ90によりアップリンクUm空間インターフェースを通って最終的に応答する。BSS20は、Lbインターフェースを通って応答メッセージ95でSMLC50にこの応答を再び再パッケージ化し、転送する。SMLC50は、応答メッセージ95を時間bとして受信する。以下では、SMLC50からのおよびSMLC50へのそのような要求および応答は、RRLP要求およびRRLP応答と呼ばれる。
【0038】
3GPP RRLPのアプリケーション層は、現在5個のメッセージをサポートしている。第1のメッセージは、ダウンリンク上で使用されるRRLP測位要求メッセージである。ネットワーク70は、MS10からの位置測定または位置推定を要求するために、このメッセージを使用する。このメッセージは、MS10のための命令を含み、またMS10のための支援データをも含んでよい。支援データは、以下において追加的に詳細に説明される。第2のメッセージは、アップリンク上で使用されるRRLP測位応答メッセージであり、これはRRLP測位要求メッセージを補完する。MS10は、位置推定情報および他の位置関連情報でネットワーク70に応答するために、このメッセージを使用する。RRLP測位要求メッセージおよびRRLP測位応答メッセージは、RRLPセッションを開始および終了するために一緒に作動する。
【0039】
第3および第4のメッセージもまた、RRLPセッションを開始および終了するために一緒に作動する。第3のメッセージは、ネットワーク70がMS10に支援データを送るために使用するRRLP支援データ・メッセージと呼ばれる他のダウンリンク・メッセージである。支援データは、E-OTD(Enhanced Observed Time Difference)基準BTS情報(例えば、BTSシグナリングおよび位置情報)および最大8個の追加のBTSについてのE-OTD測定情報を選択的に含む。第4のメッセージは、アップリンク上で使用されるRRLP支援データ受領確認(Ack)メッセージである。RRLP支援データAckメッセージは、ネットワーク70にRRLP支援データ・メッセージの受信を受領確認するためにMS10によって単純に使用される。第5のメッセージは、プロトコルにおけるエラーを報告するためにダウンリンク上またはアップリンク上のいずれかで使用されることができるRRLPプロトコル・エラーと呼ばれる典型的なメッセージである。
【0040】
図2は、RRLPセッションを使用する典型的な位置決めプロセスのメッセージ・フローを示している。MS10およびネットワーク70は、クライアントとして作用するMS10およびサーバーとして作用するネットワーク70を備えるクライアント−サーバーモデルとして捉えられてもよい。RRLPセッションは、ネットワーク70からの要求により開始し、MS10からの応答により典型的に終了する。時間aにおいて、位置決めプロセスは、ネットワーク70により開始し、MS10は、RRLP支援データ・メッセージ110を通信する。すなわち、ネットワーク70は、MS10にRRLP支援データ・メッセージ110を送り、MS10は、RRLP支援データ・メッセージ110を受け取り次第新しいRRLPセッションを開始する。時間bにおいて図示されているように、通常、MS10は、RRLP支援データAckメッセージ112と呼ばれる受領確認応答によりRRLPセッションを完結する。
【0041】
時間cにおいて、ネットワーク70は、位置命令および選択的に支援データを含むRRLP測位要求メッセージ120を送る。ネットワーク70からの位置命令は、ネットワーク(NW)によって設定される最大応答時間(NW応答)および同じくネットワーク(NW)によって設定される最小正確度(NW正確度)を含む。RRLP測位要求メッセージ120の受信に応答して、既知の移動局は、自分のGPSエンジンを始動する。GPSは、衛星(SV)および/または擬似衛星を使用する測位システム一般を総称するために使用される。エンジンもまた、データを処理する動作をするハードウェアおよび/またはファームウェアおよび/またはソフトウェアとして一般的に使用される。MS10は、次に、1つまたは複数の位置確定を決定し、各々の位置確定は、推定される不確実度を有している。
【0042】
推定される不確実度が、ネットワーク70によってシグナリングされる最小のネットワーク正確度(NW正確度)以下になると、またはMS10による位置確定計算時間がネットワーク応答時間(NW応答)パラメーターによって許容される時間の限界に達すると、位置決め処理は停止する。時間dにおいて図示されているように、MS10は、RRLP測位応答メッセージ122において計算された位置確定を報告し、およびGPSエンジンをも停止する。時間基準cとdとの間の時間差は、実質的なものであってもよい(例えば、45秒から数分)。位置決定における1つの目標は、この獲得時間を最小限にすることである。もう1つの目標は、提供される位置確定の不確実度を低減することである。
【0043】
図3は、支援データの擬似セグメント化を図示している。支援データは、1つまたは複数の衛星(SV)に基づく位置データを含んでもよい。支援データは、8個から12個またはそれ以上の衛星に関する情報を典型的に含むので、擬似セグメント化支援データ・メッセージの複数のブロックに分けられる。各々のブロックは、1個、2個、3個、または4個の衛星に関する情報を含む。図示されている例において、支援データは、3つの擬似セグメントにセグメント化されている。最初の2つのブロックは、3個または4個の衛星に関する情報を含んでもよく、および最後のブロックは、例えば図示されている全部で7個から11個の衛星のうちの1個、2個、または3個の衛星に関する情報を含んでもよい。
【0044】
支援データの第1のブロックは、時間aにおいて、第1のRRLP支援データ・メッセージ140でネットワーク70からMS10へ通信される。いったん受信されると、第1のRRPLセッションが始まるが、MS10が時間bにおいてネットワーク70にRRLP支援データAckメッセージ142を送るとき、第1のRRPLセッションをすぐに終了する。
【0045】
支援データの第2のブロックは、時間cにおいて第2のRRLP支援データ・メッセージ144でネットワーク70からMS10へ通信される。いったん受信されると、第2のRRPLセッションが始まる。この例において、時間dにおいてMS10は、メッセージ144によって作られるRRLPセッションを終了させる第2のRRメッセージ(本件明細書において追加のRRメッセージ130と呼ばれる)を受信する前に受領確認メッセージを送信する時間がない。追加のRRメッセージは、いくつかの異なるRRメッセージのいずれかであってもよい。例えば、ハンドオーバー・メッセージのようなより優先度の高いRRメッセージがMS10に送信されていてもよい。
【0046】
MS10が、ダウンリンクRRLPメッセージの一部を受信するかまたはいかなるダウンリンクRRLPメッセージも受信しないかのいずれかである場合、セッションは、プリエンプト(preempt)されたと呼ばれる。送信のためにネットワークの出力キューにメッセージが置かれるとき、プリエンプション(preemption)が生じる。ある場合において、ダウンリンクRRLPメッセージが完全に送信されうる前に、まだ送信されていないメッセージの残りは、より優先度の高いメッセージのためにキューから消去される。これらの場合、MS10は、ダウンリンクRRLPメッセージの全体ではないが、そのいくつかを受信していてもよい。他の場合において、ダウンリンクRRLPメッセージは、メッセージの第1のビットが空間インターフェース上で送信される前に消去される。これらの場合、セッションもまた、プリエンプトされたと考えられる。しかしながら、MS10は、セッションの存在について知らない。ダウンリンクRRLPメッセージが長いとき、または同じダウンリンク・キュー内にそれの前により長いメッセージ(つまり、以前の送信時間のためにスケジュールされた他のメッセージ)があるとき、プリエンプションがしばしば生じる。
【0047】
その一方で、MS10がダウンリンクRRLPメッセージの全体を受信するが、まだRRLP支援データAckメッセージのような応答を完全に送信していない場合、セッションは、アボートされた(aborted)と呼ばれる。MS10がダウンリンクRRLPメッセージに応答するのに比較的長い時間かかるとき、たいていアボートが生じる。
【0048】
プリエンプションの場合とアボートの場合の両方において、MS10および/またはネットワーク70に存在するセッションは終了される。1つの目標は、MS10に、ダウンリンクRRLPメッセージにすぐに応答させることであり、それによって、打ち切られるセッションを最小限にする。もう1つの目標は、より短いダウンリンクRRLPメッセージをネットワークに送らせることであり、それによって、キューを満杯ではない状態に保ち、プリエンプトされるセッションを最小限にする。擬似セグメント化は、ダウンリンクRRLPメッセージをより短くし、そのことによって、プリエンプトされるセッションの機会を減らすという第2の目標をターゲットにしているが、RRLP測位要求メッセージに関連する処理に関して以下でさらに説明されるように、ダウンリンク・メッセージにすぐに応答するという第1の目標には対処していない。
【0049】
以下で、アボーション、アボート、またはアボートされた、という用語は、追加のRRメッセージの受信によるアボーション・セッション、またはより優先度の高いダウンリンク・メッセージによるダウンリンク・キューのプリエンプションのいずれかにより生じるセッションを終了することを指すのに使用される。
【0050】
アボートされたセッションからの回復のために、ネットワーク70は、リビッド・メッセージを送信する。リビッド・メッセージは、ダウンリンク・キューにあらかじめ置かれたメッセージの次の送信である。図示されている例において、時間eにおいて、支援データの第2のブロックは、MS10において第3のRRLPセッションを始めるリビッドRRLP支援データ・メッセージ148に含まれる。MS10は、時間fにおいて、他のRRLP支援データAckメッセージ150によりネットワーク70に対して受領確認を通知する。
【0051】
支援データの最後のブロックは、時間gにおいてRRLP測位要求メッセージ120の中でネットワーク70からMS10へ送信される。当該メッセージ120は、MS10によって受信され、この例における第4のセッションを開始する。MS10は、次に、位置決定を開始するよう命令される。この位置決定には、何十秒ないし数分かかるかもしれない。命令を受信してから応答を送信するまでの時間の間、セッションは、追加のRRメッセージによるセッションのアボーションを受けやすい。この例において、最終セッションは、アボートされず、むしろMS10は、時間hにおいてRRLP測位応答メッセージ122により応答する。
【0052】
図4および5は、MS10が追加のRRメッセージを受信することに基づいて位置決定を停止することを例示している。図4において、時間aにおいて、ネットワーク70は、MS10にRRLP支援データ・メッセージ110を送信し、その後、時間bにおいて、MS10は、RRLP支援データAckメッセージ112により返答する。ネットワーク70およびMS10は、このメッセージ交換を数回繰り返すことによって、GPSエンジンを始動させる前にMS10に対するほとんどすべての支援データを提供することができる。時間cにおいて、ネットワーク70は、MS10に支援データの最後のブロックでRRLP測位要求メッセージ120を送る。このポイントにおいて、MS10は、MS10のGPSエンジンを始動させ、位置決めを開始する。
【0053】
時間dにおいて、ネットワーク70は、MS10に追加のRRメッセージ130(すなわち、MS10が進行中のセッションにあるのでMS10が受信することを予期していなかったというメッセージ)を送る。MS10が返答メッセージを送信することができる状態になる前に生じたこの追加のRRメッセージ130は、RRLP測位応答メッセージ120によって始動された現在のセッションをMS10にアボートさせることになる。セッションを打ち切ることの一環として、MS10は、GPSエンジンをシャットダウンし、位置決めプロセスを終了し、追加のRRメッセージ130に応答し、およびネットワーク70からの次の要求を待つ。時間eにおける△tの短い遅れの後(なお、△t = e − d)、ネットワーク70は、RRLP測位要求メッセージ120Aのリビッドを送信する。RRLP測位要求メッセージ120Aのリビッドは、MS10のGPSエンジンの再始動と位置決めの再開をMS10にさせる。追加のRRメッセージ130による割込みに先立つメッセージ120Aのリビッドを送るこのプロセスは、提供されるネットワーク応答時間および正確度のパラメーターの範囲内でMS10がMS10の位置を決定することができる前に数回生じてもよい。時間fにおいて、MS10は、RRPL測位応答メッセージ122の中でネットワーク70に決定位置を報告する。
【0054】
図5は、このメッセージ交換を状態図の形式で示している。MS10がRRLP測位要求メッセージ120を受信するとき、MS10は、GPSエンジンを始動させ、位置決定を開始する状態200に入る。通常の割込みされないオペレーションでは、MSは、位置を決定し220、状態230に入ることでネットワークにその位置を報告する。MSは、RRPL測位応答メッセージ122を送る。提供されるネットワーク応答時間内に位置確定が決定されないとき(例えば、応答時間の時間切れが生じるとき)、MS10は、状態200を出て、状態230に入ることができる。状態230では、MS10は、ネットワークによって要求されるよりも悪い正確度を備える位置確定を含むRRPL測位応答メッセージ122により返答する。
【0055】
この状態図は、生じる可能性のある他の状況を示している。例えば、MS10が追加のRRメッセージ130を受信するとき、MS10は、状態200を出て、状態210に入る。状態210において、MS10は、GPSエンジンをシャットダウンし、位置決定を停止する。MS10がリビッドRRLP測位要求メッセージ120Aを受信するとき、MS10は、状態210を出て、状態200に再び入る。結局のところ、MS10は、通常、位置を決定するか、または時間切れとなるか(220)のいずれかであり、およびRRLP測位応答メッセージ122により応答するために状態230に入る。
【0056】
上で説明された位置決めプロセスでは、MS10のGPSエンジンを開始する前にRRLP測位要求メッセージ120まで待ち、MS10が追加のRRメッセージ130を受信するとき、そのGPSエンジンをシャットダウンすることによって、GPSエンジンが実行する継続時間を最小限にする。RRLP測位要求メッセージ120を受信することに応答してGPSエンジンを始動することによって、MS10は、ネットワーク70は位置確定が必要であると分かる。何らかの他の場合においては、ネットワーク70がMS10からの位置確定を要求するという保証はない。したがって、この時点よりも前に始動しないことによって、MS10は、バッテリー電力を節約する。MS10はまた、RRLPセッションがいったん終わる(例えば、アボーションの結果または位置確定の報告の結果として)とGPSエンジンをシャットダウンすることによってバッテリー電力を節約する。
【0057】
本件発明のいくつかの実施形態にしたがって、この既知の手順に従わず、代わりにRRLP測位要求メッセージ120を受信することを見越してGPSエンジンを始動することによる利点が認識されることができる。さらに、RRLPセッションがいったん終わるたびにGPSエンジンをシャットダウンしないことによる利点が認識されることができる。バッテリー電力の費用で、GPSエンジンは、早めに(つまり、RRLP測位要求メッセージ120が受信される前に)始動されることができおよびRRLPセッションが終了されても位置決定プロセスを継続することができる。
【0058】
図6および7は、本件発明の実施形態にしたがって、GPSエンジンを始動またはシャットダウンするイベントを示している。図6の状態図は、2つの状態を示している。1つは、GPSエンジンが動いていない状態800であり、もう1つは、GPSエンジンが始動し、位置決定プロセスが始まっている状態810である。RRLP測位要求メッセージ120の将来の受信を見越してGPSエンジンの早めの始動を起動するいくつかのトリガ・イベントがユーザー側およびネットワーク側で生じてもよい。トリガ・イベントは、実行時のオペレーションを開始した後に生じる。すなわち、トリガ・イベントは、移動局を単にオンにして、移動局を実行時のオペレーションにするというものではない。何らかのデバイスが常にGPSエンジンを実行しており、したがって、GPSエンジンを始動するトリガ・イベントが存在しない。トリガ・イベントは、移動局のGPS位置決め機能を明確にオンにするためのユーザー・オペレーションではない。トリガ・イベントは、GPSエンジンを典型的にオンにしないイベントである。さらに、トリガ・イベントは、GPSエンジンを典型的にオンにするメッセージであるRRLP測位要求メッセージの受信より前に生じる。
【0059】
最初に820において、救急サービス(ES)コールが起動されたというトリガ・イベントをMS10が検出したら、MS10は、状態800から状態810に移行することができる。位置確定が必要とされることを示す移動局アプリケーション(MS App)からのメッセージをMS10が受信したら、ユーザー側で開始されるもう1つの移行が生じることができる。ネットワーク側のイベントもまた、状態800から状態810への移行を起動することができる。例えば、840において、新しいRRLP支援データ・メッセージのトリガ・イベントをMS10が受信したら、MS10は、状態800から状態810に移行することができる。850において、MS10が付加価値サービス(VAS)メッセージのトリガ・イベントを受信したら、MS10は、状態800から状態810に移行することができる。完全性のために、860において、RRLP測位要求メッセージ120の受信によって既知の状態を移行するプロセスが図示されている。
【0060】
図6を参照して説明されたように早めに始動することに加えて、図7において図示されているように、GPSエンジンのシャットダウンが有利に延期されることができる。図7もまた、2つの状態を含んでいる。状態900では、GPSエンジンは、(例えば、上で説明されたイベントのうちの1つにより)実行中である。状態910では、GPSエンジンがシャットダウンされている。いくつかのイベントは、GPSエンジンをシャットダウンするために状態900から状態910への移行をトリガしてもよい。例えば、位置が導き出されてもよく、または時間切れが生じてもよい。920において、より良い位置確定を待つMS APPのように、エンジンが実行を続ける重要な必要性が他にないとき、RRPL測位応答メッセージ122を最近送ったことの結果として移行が生じる。移行はまた、位置確定がMS APPにたった今報告され、およびMS10がRRLP測位要求メッセージ120を見越しておらず、RRPL測位応答メッセージ122を送ることを予期していないときにも生じうる。
【0061】
異常な場合もまた移行が生じる原因となりうる。例えば940において、(例えば、上で説明されたイベント820または840により)MS10がRRLP測位要求メッセージ120を見越していたが、所定の時間(例えば、45、60または90秒、または30-60、30-90、30-120、30-180、30-240、60-90、60-120、60-180、60-240、90-120、90-180、90-240、120-180、120-240など、当業者によって理解されるであろう時間の範囲から選択される値)内にメッセージを受信しなかった場合、MS10は、GPSエンジンをシャットダウンすることができる。同様に940において、GPSエンジンがあまりにも長い時間(例えば、120または180秒)作動を続けていたら、MS10は、時間切れとし、GPSエンジンをシャットダウンし、そうすることによってバッテリー電力を節約することができる。
【0062】
図8は、本件発明の実施形態にしたがって、早めの位置決定を強調するメッセージ・フロー図を示している。1つの目標は、MS10がネットワーク70からの将来のRRLP測位要求メッセージ120をMS10が予期または見越すと同時にGPSエンジンを始動することである。時間aにおいて、MS10は、救急サービス・コールのためにダイヤルされた数字(例えば、米国では「911」、ヨーロッパでは「112」、または日本では「119」)を認識する。コールが救急サービス・コールであるといったん認識されると、MS10は、MS10の位置確定の必要性を予期してGSPのエンジンを始動させることによって位置決定を開始することができる。
【0063】
時間bにおいて、ネットワーク70は、MS10にRRLP支援データ・メッセージ110を送る。これを受けて、時間cにおいて、MS10は、RRLP支援データAckメッセージ112により返答する。メッセージ110および112を送るこのプロセスは、ネットワーク70が十分な支援データを送信してしまうまで繰り返されてもよい。最後に、時間dにおいて、ネットワーク70は、MS10にRRLP測位要求メッセージを送る。MS10は、自分の位置を決定することを継続する。次に、時間eにおいて、MS10は、自分の決定された位置を含むRRLP測位応答メッセージ122によりネットワーク70に返答する。
【0064】
図9および10は、本件発明の実施形態にしたがって、追加のRRメッセージ130が受信された後に位置決定を継続する方法を例示している。もう1つの目標は、マイナーな異常なイベントによってGPSエンジンの作動を継続することである。図9において、追加のRRメッセージ130は、現在の測定セッションをアボートするが、MS10は、位置決めプロセスを継続し、MS10のGPSエンジンを中断しない。時間aにおいて、MS10は、ネットワーク70からRRLP支援データ・メッセージ110を受信する。これを受けて、時間bにおいて、MS10は、RRLP支援データAckメッセージ112により返答する。改めて、メッセージ110および112を送るこのプロセスは、ネットワーク70が十分な支援データを送信してしまうまで繰り返されてもよい。
【0065】
時間cにおいて、ネットワーク70は、MS10にRRLP測位要求メッセージ120を送る。この時点で、GPSエンジンは、MS10が救急コールを認識するか、または他のトリガ・イベントを認識するかのいずれかに基づいて既に実行中である。時間dにおいて、ネットワーク70が返答を受信する前に、ネットワーク70は、時間cにおいて開始されたRRLPセッションを中断する。既知の移動局は、RRLPセッションを終了し、また、GPSエンジンもシャットダウンする。ここで、MS10は、GPSエンジンが位置決めプロセスを継続することを可能にするためにGPSエンジンを中断されない状態のままにしておく。
【0066】
最後に、時間eにおいて、ネットワーク70は、リビッド・プロセスにおいてMS10へRRLP測位要求メッセージ120Aを再送する。改めて、MS10は、GPSエンジンを再始動せず、位置決めプロセスを継続する。上で述べたように、アボートおよびリビッドのプロセスは、繰り返してもよい。次に、時間fにおいて、MS10は、自分の決定された位置を含むRRLP測位要求メッセージ122によりネットワーク70に返答する。
【0067】
図10は、状態図を示している。トリガ・イベントが生じるとき、MS10は、状態300に入る。トリガ・イベントは、RRLP測位要求メッセージ120を受信すること、RRLP支援データ・メッセージ110を受信すること、救急サービス・コールの開始を認識することなどを含む。状態300において、MS10は、既に動作中である場合は、位置決定を継続し、またはまだ始動していない場合は、GPSエンジンを始動することによって位置決定を開始する。
【0068】
通常、位置が決定されるとき、または時間切れが生じるとき(移行310として図示されている)のいずれかのとき、MS10は、状態300を出て、状態320に入る。例えば、ネットワーク70が所定の少ない時間内での測定を予期しているとMS10が決定するとき、時間切れが生じうる。ある場合では、MS10が応答を送ることができる前に現在のRRLPセッションをアボートする追加のRRメッセージ130をMS10が受信するとき、MS10は、状態300を出て、状態330に入る。
【0069】
状態330において、MS10は、現在のRRLPセッションをアボートするが、位置決定を継続する。リビットRRLP測位要求メッセージ120Aを受信すると、MS10は、状態340に入るが、再び位置決定プロセスを継続する。MS10が位置をいったん決定するか、または時間切れがいったん生じると(移行340として図示されている)、MS10は、状態340を出て、状態320に入る。状態320において、MS10は、ネットワーク70にそのRRLP測位要求メッセージ320を送る。
【0070】
図11および12は、本件発明の実施形態にしたがって、ダウンロードされた支援データを最適に配列する方法を例示している。支援データは、1つまたは複数の(擬似セグメント化された)RRLP支援データ・メッセージ110でおよび/またはRRLP測位要求メッセージ120の中で送信されることができる。ネットワーク70からMS10への支援データの通信を最適に配列することは、RRLP測位要求メッセージ120により命令される前に、MS10が位置決定プロセスを早めに有利に開始し、および支援データのセグメントを積極的に使用することを可能にする。
【0071】
図11は、セグメント化された支援データ400の最適な配列を示している。第1のセグメントは、衛星時間および粗いMS位置420を含む基準情報410を含む。第1のおよび残りのセグメントは、衛星の位置情報(アルマナックおよび天体位置表のデータを含む)430を含む。衛星の位置情報430は、最適な衛星440から次の最適な衛星450まで配列され、および最も最適でない衛星460まで続いている。必ずしもすべての利用可能な衛星がこの最適に配列された支援データのリストの中に置かれる必要はない。
【0072】
衛星の最適な配列は、最も見られることができそうでかつMS10の位置を速く決定するのに役に立ちそうな1セットの衛星をMS10に提供するために、1つまたは複数の機能を考慮に入れてもよい。例えば、粗いMSの位置についての知識は、同様の粗いMSの位置を備えている移動局にとって見えるよう経験的に示されている衛星位置を探すために使用されることができる。ネットワーク70は、同様のまたは同じ粗いMSの位置を有する移動局にとって利用可能となるよう観測または実験によって示されている宇宙のある領域内にあるべき衛星を探すことができる。
【0073】
さらに、粗いMSについての知識は、環境の一般的な特徴を決定するために使用されることもできる。この環境上の特徴は、MS10が自分の位置を決定することができるように、最良の衛星を識別するために使用されることができる。粗いMS位置は、例えば、田舎の景観(例えば、水平な田舎の環境)、山地の景観(例えば、南北方向の谷においてまたは山の西側の斜面に沿って)、または都会の景観(例えば、高層ビルが密集した中心街)に位置しているようなMS10を識別することができる。粗いMS位置が、上空の妨げのない視界をMS10が最も有していそうであると示す場合、ネットワーク70は、衛星の直交のセットまたは衛星の擬似直交のセットについての衛星位置情報(例えば、互いに120度離れている水平線から45度に一番近い3個の衛星)を最初に提供してもよい。これらの3個の衛星のうちのいずれか2個は、移動局に対してほぼ直交に向けられているだろう。すなわち、第1の衛星と移動局との間の第1の線、および第2の衛星と移動局との間の第2の線は、直角(直交)または60度と120度の間の角度(ほぼ直交方向)を形成している。特定の宇宙の領域に位置している衛星をMS10が見ることができないだろうと粗いMS位置が示唆する場合(例えば、山が東側の上空を覆う場合)、それらの衛星についての位置情報は、最適な衛星リストの下のほうにあるかもしれない(またはリストから完全に削除されうる)。
【0074】
基準情報410に加えて、支援データの第1のセグメントはまた、許容できるメッセージの長さによって提供されるような1つまたは2つの衛星についての情報を含んでもよい。第1のセグメントは、MS10に最適な440である衛星位置情報を含んでいる。支援データの第2のセグメントは、次の2個、3個、または4個の最適な衛星450についての衛星位置情報を含んでいる。支援データの各々の後続のセグメントは、最も適切でない衛星460の衛星のセットに到達するまで、等しいかまたは段々に最適でない衛星についての衛星位置情報を含んでいる。
【0075】
図12は、支援データのセグメントを配列、および送信するためのフローチャートを示している。ステップ500において、ネットワーク70は、MS10にとって最適から最も適切でないものまでの順に衛星リストを配列することによって配列リストを提供する。両方のリストは、ネットワーク70内のメモリーに記憶されてもよい。配列は、各々のMS10に特有であってもよい。例えば、配列は、粗いMS位置に依拠してもよい。ステップ510において、ネットワーク70は、基準情報(つまり、基準の時間および粗いMS位置)および最適な衛星についての衛星位置情報を含む第1のセグメント化されたRRLP支援データ・メッセージ110を送る。
【0076】
ステップ520において、ネットワーク70は、例えば、ネットワーク70内のコントローラーまたはコントローラー論理を使用して、RRLP測位要求メッセージ120を送る時間であるかどうかを決定する。ネットワーク70は、十分な支援データがMS10に既に送られていたら、RRLP測位要求メッセージ120を送る時間であると決定してもよい。少なくとも所定の数の衛星(例えば、4-14個の衛星)についての衛星位置情報をMS10が有している場合、ネットワーク70は、MS10が十分な量の支援データを有していると決定してもよい。代替的に、所定の数の衛星には到達していないが、支援データ・メッセージの中で送るためにもはや衛星情報が利用可能でなくなったら、ネットワークは、RRLP測位要求メッセージ(支援データの最終部分を備えるまたは備えない)を送信することができるか、または時間丁度にRRLP測位応答メッセージを受信するようRRLP測位要求メッセージが送られるようタイマーをセットすることができるかのいずれかである。代替的に、位置確定がネットワーク70によって必要とされるまでの残り時間が所定の時間よりも短い場合、ネットワーク70は、MS10が十分な量の支援データを有していると決定してもよい。この場合、時間切れが生じたら、ネットワーク70は、RRLP測位要求メッセージ120を送る時間であると決定する。代替的に、すべての支援データが以前に送られてしまっていたら、ネットワーク70は、RRLP測位要求メッセージ120を送る時間であると決定してもよい。
【0077】
RRLP測位要求メッセージ120を送る時間ではない場合、ネットワーク70は、ステップ530に移ることができる。RRLP測位要求メッセージ120を送る時間である場合、ネットワーク70は、ステップ540に移ることができる。ステップ530において、ネットワーク70は、次の最適な衛星のグループについての位置情報を含む次のセグメント化されたRRLP支援データ・メッセージ110を送り、その後、ステップ520に戻る。ステップ520と530との間のこのループは、複数回継続してもよい。ステップ540において、ネットワーク70は、RRLP測位要求メッセージ120を送る。RRLP測位要求メッセージ120は、支援データの最終セグメントを含んでもよい。代替的に、RRLP測位要求メッセージ120は、以下で詳細に説明されるように何らかの支援データが欠落していてもよい。
【0078】
図13および14は、本件発明の実施形態にしたがって、ジャスト・イン・タイムの位置要求を送る方法を示している。
【0079】
図13では、時間aにおいて、ネットワーク70が、RRLP測位要求メッセージ120のようなRRLPメッセージを送ることによってRRLPセッションを開始する。このシナリオは、ネットワーク70がMS10に1つまたは複数のRRLP支援データ・メッセージ110を成功的に送った、またはMS10がそのメモリー内に支援データを既に有していると仮定している。図示されている例において、ネットワーク70は、およそ35秒でのMS10からの位置確定を要求する。時間bにおいて、RRLPセッションは、他の何らかのRRメッセージ131によりアボートされる。
【0080】
ある場合において、時間aにおいて図示されているRRLPメッセージ120は、ネットワーク70の出力キュー内にまだ在るかもしれないので、MS10は、RRLPメッセージを受信しておらず、またRRLPセッションを開始していない。この場合、他のRRメッセージ131は、RRLPメッセージ120がキューから成功的におよび完全に送信されうる前にキューからそれを取り除くことによってRRLPメッセージ120をプリエンプトする。第1のRRLP支援データ・メッセージ(図示されていない)のようなトリガ・イベントをMS10が以前に受信しているために、GPSエンジンが既に動作中である。各々の後続のメッセージの間、GPSエンジンは、位置決定プロセスを中断されることなく継続する。
【0081】
ネットワーク70は、時間cにおいて、位置確定が必要とされるまでに最短時間のみしか残っていない(例えば、残りおよそ4秒)と決定する。ネットワーク70は、RRLP測位要求メッセージ120BをMS10に送る。このメッセージ120Bは、応答が(時間dにおいて)ジャスト・イン・タイムに受信されるようにある時間(時間c)において送られる。いくつかの実施形態において、RRLP測位要求メッセージ120Bは、NW応答時間およびNW正確度パラメーターを備えて送られるが、支援データは備えられずに送られる。RRLP測位要求メッセージ120は、短い時間切れ(例えば、NW応答時間が2または4秒を表わしている)を含んでいるかもしれない。この短い時間の間にMS10は、位置確定を返さなくてはならず、不確実度についての低い値を含んでいる可能性がある(NW正確度は、高い正確度、例えば、およそ10メートルを示す)。代替的に、RRLP測位要求メッセージ120は、大きな位置不確実度を許すための位置正確度パラメーター・セットを含んでいてもよい(NW正確度は、低い正確度、例えば、およそ250メートルを示す)。時間dにおいて、残り時間がおよそ0秒または0秒に近いとき、ネットワーク70は、ジャスト・イン・タイムにMS10からRRLP測位要求メッセージ122を受信する。
【0082】
比較的早く中断されたRRLPセッションのためにリビッドが必要だったので、このジャスト・イン・タイム手順が呼び出される可能性がある。ある場合において、中断されたRRLPセッションは、前のRRLP測位要求メッセージ120によって始動されるセッションであるはずである(図示されているように)。ある場合において、中断されたRRLPセッションは、RRLP支援データ・メッセージ110によって始動されるセッションであるはずである。ある場合において、中断されたRRLPセッションは、前のRRLP測位要求メッセージ120またはRRLP支援データ・メッセージ110のいずれかによって始動されるセッションであってもよい。
【0083】
図14は、ネットワーク70における、ジャスト・イン・タイムの位置要求および応答のためのプロセスを示している。ステップ600において、ネットワーク70は、RRLP測位要求メッセージ122が必要とされる将来の時間を決定する。ステップ610において、ネットワーク70は、タイマー、スケジュールなどをセットし、位置データが必要とされる直前(例えば、4秒前)まで待機する。最後のRRLPメッセージの後、かつ、ジャスト・イン・タイムRRLP測位要求メッセージ120の前のこの待機時間の間、ネットワークは、他のRRメッセージを送ってもよく、および移動局の位置決定プロセスを中断しなくてもよい。
【0084】
ステップ620において、ネットワーク70は、RRLP測位要求メッセージ120を送る。このメッセージ120は、支援データ無しで一度に送られ、応答するのに十分な時間をMS10に与える。ステップ630において、ネットワーク70は、位置が必要とされる直前にRRLP測位応答メッセージ122を受信する。
【0085】
上で述べられたように、このジャスト・イン・タイム・プロセスは、ネットワーク70によって送信されるすべてのRRLP測位要求メッセージ120について実装されてもよい。位置確定が必要とされる(例えば、リビッドを予期している場合)直前までRRLP測位要求メッセージ120を送るために待機することは、アボートされるセッションの発生を低減し、チャネル帯域幅を節約する。代替的に、1つまたは複数のアボーションおよび/またはプリエンプションがこのMS10との現在の通信内で生じた場合、このプロセスが実装されてもよい。代替的に、1つまたは複数のアボーションまたはプリエンプションが、例えば、同様の粗いMS位置を有する移動局についてのこのセル内の他の移動局との通信で生じた場合、このプロセスが実装されてもよい。
【0086】
図15および16は、本件発明の実施形態にしたがって、アボートされるセッションを回避するために新しいRRメッセージを遅らせる(または落とす)方法を示している。
【0087】
図15は、ワイヤレス・ネットワークにおけるネットワーク70とMS10との間のリビッドを最小限にする方法を示している。時間aにおいて、ネットワーク10は、RRLP要求メッセージ100を送り、そうすることによって、セッションを作動する。RRLP要求メッセージ100は、RRLP支援データ・メッセージ110またはRRLP測位要求メッセージ120のいずれかであってもよい。時間bにおいて、ネットワーク10がMS10からの応答を受信する前に、ネットワーク70は、RRLPセッションがまだ開いている間に、新しいRRメッセージがネットワーク70からMS10に送られる準備ができていると決定する。既知のシステムにおいて、ネットワーク70は、この新しいRRメッセージを直ちに送信することによって、現在のRRLPセッションをアボートする。本件発明の実施形態にしたがって、ネットワーク70は、現在のRRLPセッションがアボートされることを回避するために新しいRRメッセージを送るために、可能ならば、待機する。すなわち、RRLPセッションをアボートすることを回避するために、ネットワーク70は、RRLP応答/受領確認メッセージ102が受信され、そのことによってRRLPセッションが正常に閉じる後まで、新しいRRメッセージを待機する。特定の新しいRRメッセージに基づいて、ネットワーク70は、新しいRRメッセージを送るのを待つか、または新しいRRメッセージを全部落とすかのいずれかであってもよい。時間cにおいて、ネットワーク70は、RRLP応答/受領確認メッセージ102を受信および認識する。その後少しして、時間dにおいて、新しいRRメッセージが落とされなかった場合、ネットワーク70は、RRLPセッションが閉じられた後に新しいRRメッセージを送り、そのことによって、RRLPセッションのアボートを回避する。
【0088】
図16において、ステップ650において、ネットワーク70は、RRLP要求メッセージを送る。ステップ660において、RRLPセッションが閉じられる前に、ネットワーク70は、新しいRRメッセージがMS10に送られる準備ができていると決定する。ステップ670において、ネットワーク70は、新しいRRメッセージの送信を遅らせる(または落とす)ことができるかどうかを決定する。それが許容されない場合、ネットワーク70は、ステップ690において新しいRRメッセージを送り、そのことにより、現在のRRLPセッションをやむを得ずアボートする。ステップ680において、ネットワーク70は、RRLP応答/受領確認メッセージ102を待ち、その後RRLP応答/受領確認メッセージ102を受信する。新しいRRメッセージが遅れた場合、処理を完結する前に、処理はステップ690まで続いていく。新しいRRメッセージが落とされた場合、送られるべき新しいRRメッセージは残っておらず、処理は完結する。
【0089】
図17、18、19、20および21は、本件開示の実施形態にしたがって、救急サービス(ES)コールにおける応答時間と正確度とのバランスを図るために正確度パラメーターを変化させる方法を例示している。
【0090】
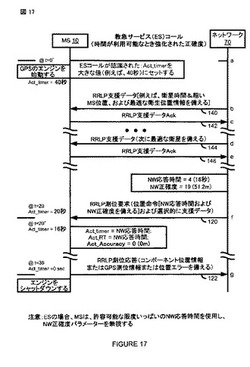
図17は、時間が利用可能なとき、強化された正確度を使用するための救急サービス(ES)コールのためのコール・フロー処理の一例を示している。時間a (t = 0)において、MS10は、ESコールを識別する。ESコールを識別することに応答して、MS10は、GPSエンジンを始動する。MS10は、活動タイマーを大きな値(例えば、Act_timer = 40秒)にセットしてもよい。活動時間についての1つの目標は、ネットワーク70とMS10との間のメッセージの活動(または不活発性)を監視することである。ある時間の間活動が無い場合、活動タイマーは、時間切れになり、GPSエンジンはシャットダウンされる。
【0091】
時間bにおいて、ネットワーク70は、第1のRRLP支援データ・メッセージ140を送る。この第1のメッセージ140は、基準情報410(図11からの衛星時間および粗いMS位置420)を含む。第1のメッセージ140はまた、MS10に最適な衛星についての衛星位置情報を含む。時間cにおいて、MS10は、RRLP支援データAckメッセージ142により返答する。時間dおよび時間eにおいて、MS10にとって次に最適な衛星についての第2の追加の支援データ(衛星位置情報)を送るために、支援データ・メッセージ144および受領確認メッセージ146を通信するプロセスは、一回または複数回繰り返してもよい。
【0092】
次に、ネットワーク70は、RRLP測位要求メッセージ120を準備する。RRLP測位要求メッセージ120は、ネットワーク応答時間(NW応答時間)パラメーターの値を含んでいてもよい。このNW応答時間パラメーターは、中間応答時間(例えば、値4は16秒に対応する)を示すようセットされてもよい。メッセージ120はまた、ネットワーク正確度(NW正確度)パラメーターを含んでもよい。このNW正確度パラメーターは、中間の正確度または不確実度(例えば、値19は51.2メートルに対応する)を示すようセットされてもよい。このパラメーターおよび他の距離または不確実度パラメーターまたは範囲であって、本件明細書において特定の値で説明されるものは、単に例示として提供されるものである。他の値が使用されてもよい。51.2メートルまたは245.5メートルの値は、例えば、40から60メートル、30から70メートル、40から100メートル、40から400メートル、100から150メートル、100から250メートル、100から300メートル、100から400メートルなどの当業者が理解するような範囲の値であってもよい。
【0093】
時間fにおいて、ネットワーク70は、RRLP測位要求メッセージ120を送る。ある場合において、支援データの最後のセットは、このメッセージ120に含まれる。他の場合において、支援データの最後のセットは、RRLP支援データ・メッセージ144であった、前のメッセージに含まれる。
【0094】
正確度を強化するために、MS10は、不確実度を全く表わさない、またはほとんど表わさない正確度値を使用してもよい。例えば、Act_Accuracyパラメーターは、値0にセットされてもよい。これは、0メートルの不確実度(最高の正確度値)を表わす。代替的に、Act_Accuracyパラメーターは、1.0、2.1、3.3または4.6メートルの不確実度を表わすために、値1、2、3または4にそれぞれセットされてもよい。不確実度を全くまたはほとんど表わさない他の値が使用されてもよい。
【0095】
ある場合において、MS10がこの強化された正確度プロセスを駆動する場合、MS10は、ネットワーク70によって送られるNW正確度パラメーターとは別個にAct_Accuracyパラメーターを有利にセットする。他の場合において、ネットワーク70が強化された正確度プロセスを駆動する場合、ネットワーク70は、標準ネットワーク正確度(例えば、51.2m)を有利におよび一時的にオーバーライドし、および後でRRLP測位要求メッセージ120の中で送るパラメーターを、不確実度を全くまたはほとんど表わさない正確度値にセットする。
【0096】
図示されているように、時間fの後、MS10は、例えば、現在の活動時間上の残り時間がネットワークが提供する応答時間よりも少ない場合、現在のカウントダウン時間(たとえば、20秒)から、ネットワーク応答時間(Act_timer = NW応答時間)と一致する値に活動タイマーをリセットする。このようにして、MS10は、測位確定が決定されてネットワーク70に通信されないうちに早まってGPSエンジンをシャットダウンするようなことはしない。MS10は、同様に、第2のカウントダウン・タイマーを応答時間にセットする(Act_timer = NW応答時間)。このタイマーは、MS10が決定された位置を送るときにセットするためにMS10によって使用されてもよい。
【0097】
時間gにおいて、例示における経過時間は、36秒である。MS10は、位置確定を決定する際にすべての割り当てられたネットワーク応答を使用する。したがって、位置正確度が達成されていなくても、強化された正確な位置は、標準ネットワーク正確度(例えば、51.2m)により要求されるよりも高い正確度(または同様に、より少ない不確実度)を潜在的に有しているとわかる。
【0098】
この不確実度パラメーターを0まで下げることによって、MS10は、位置確定を計算する際にすべての許容可能なネットワーク応答時間を使用する。不確実度パラメーターを低い値(例えば、1、2、3、または4)に下げることによって、MS10は、位置確定が低く推定された不確実度で決定されうる限り、許容可能なネットワーク応答時間全体を使用する可能性が最も高い。より低い必要性の不確実度で位置確定を得るよう試みる際にGPSエンジンによって使用される追加時間は、強化された正確位置確定を生成する機会をMS10に与える。
【0099】
時間gにおいて、MS10は、次のようなコンポーネントのうちの1つによりRRLP測位要求メッセージ122を送る:これらは、LocationInfo; GSP-MeasureInfo;または LoctionErrorである。典型的に、MS10が許容可能な位置確定または時間切れを決定するとき、MS10は、LocationInfoコンポーネントで応答する。代替的に、MS10がネットワーク70に測定を提供するよう命令されるとき、MS10は、GSP-MeasureInfoコンポーネントにより答えるだろう。この命令は、ネットワーク70がこの未処理データに基づいて位置を決定することを可能にする。
【0100】
図18は、救急サービス(ES)コールのためのコール・フロー処理の他の実施形態を示している。このシナリオにおいて、位置要求メッセージは、MS10が時間どおりの位置応答で返信をすることができるようにジャスト・イン・タイムに通信される。フローは、図17を参照して上で説明されたように開始する。時間a (t = 0)において、MS10は、ESコールを識別し、その後、応答して、GPSエンジンを始動させる。再び、活動カウントダウン・タイマーがセットされる(Act_timer = 40秒)。時間bにおいて、ネットワーク70は、第1のRRLP支援データ・メッセージ140を送る。時間cにおいて、MS10は、RRLP支援データ・メッセージ142により返信する。プロセスは、複数のセットの140/142メッセージの通信に続いてもよい。
【0101】
時間dにおいて、このシナリオは、以前に説明した状況から出発する。時間dにおいて、ネットワーク70は、位置要求メッセージを送るために必要とする情報を有している(RRLP測位要求メッセージ120)が、ネットワーク70は、ネットワーク70が位置確定を必要とするまでの所定の時間までメッセージを送るために待機する。標準ネットワーク正確度は、十分な正確度を提供するようセットされてもよい(51.2メートルに相当するNW正確度 = 19)が、ネットワーク・セット応答時間は、徹底的に短くされる。例えば、NW応答時間は、MS10に数十秒与えるよりも、むしろ2(4秒を表わす)または1(2秒を表わす)にセットされてもよい。この徹底的に短くされた時間は、移動局が位置確定を決定することが通常できない。通常、移動局は、数十秒から数分を必要とする。ここで、MS10が位置決定プロセスを早めに(例えば、時間aにおいて)開始するので、数十秒の間既にその位置決定に取り組んでしまっている。
【0102】
再び、ネットワーク70は、RRLP測位要求メッセージ120を準備する。メッセージ120は、徹底的に短くされたネットワーク応答時間(例えば、NW応答時間 = 4秒)およびネットワーク正確度(例えば、NW正確度 = 51.2メートル)を含む。時間eにおいて、例示における経過時間は、32秒であり、ネットワーク70は、RRLP測位要求メッセージ120を送る。この場合、支援データの最後のセットは、前のメッセージに含まれる(つまり、最後のRRLP支援データ・メッセージ140)。したがって、このメッセージ120は、支援データ無しで送られる。
【0103】
ある場合において、MS10によって使用される正確度は、低い正確度または言い換えると高い不確実度を表わす値にセットされる(例えば、値34は245.5メートルを表わす)。これは、所定の値または所定の設定可能な値であってもよい。低い正確度を表わすこの正確度値は、ネットワーク70による方法、またはMS10による方法のうちの1つの方法によってセットされてもよい。
【0104】
正確度値がネットワーク70によってセットされる場合、ネットワーク70は、この低い正確度値(NW正確度)を表わすようセットされたネットワーク正確度でRRLP測位要求メッセージ120を送る。例えば、ネットワーク70は、このMS10についての低い正確度値で標準ネットワーク正確度を一時的に上書きしてもよい。
【0105】
他方で、正確度がMS10によりセットされる場合、ネットワーク70は、標準ネットワーク正確度を表わすようセットされたネットワーク正確度でRRLP測位要求メッセージ120を送ってもよい。MS10は、受信したネットワーク正確度を上書きまたは無視し、その代わりに低い正確度を表わす値を使用する。MS10は、内部のカウントダウン・タイマーおよび応答時間タイマー(つまり、それぞれ、Act_timer = NW応答時間およびAct_RT = NW応答時間)の両方のためにネットワーク応答時間(NW応答時間)を使用する。時間fにおいて、応答時間タイマーがいったんゼロになると(例示における経過時間は、36秒である)、MS10は、RRLP測位応答メッセージ122を準備し、送る。
【0106】
このシナリオは、いくつかの利点を有する。バッテリー電力の損失を最小限にする一方で、MS10は、GPSエンジンを早めに(時間aにおいて)始動させ、および位置確定を決定する際に最大可能時間を使用し、強化された位置確定を提供する。RRLP測位要求メッセージ120は短い(なぜなら支援データを含まないから)ので、メッセージ120がプリエンプトされる可能性は低下する。ネットワーク応答時間が低い(例えば、4秒)ので、他のRRメッセージで最後のRRLPセッションがアボートされる機会は低下する。低下した正確な値(例えば、Act_Accuracy = 245.5メートル)が標準ネットワーク正確度(例えば、NW正確性 = 51.2メートル)の代わりになる場合、他のRRメッセージで最後のRRLPセッションがアボートされる機会は、さらに低下する。
【0107】
図19は、救急サービス(ES)コールのためのコール・フロー処理の他の実施形態をさらに示している。このシナリオにおいて、(支援データを備えているまたは備えていない)第1の位置要求メッセージ120は、最後のRRLP支援データ・メッセージ142の直後に通信される。このRRLPセッションが中断される場合、ネットワーク70は、位置が必要とされるときに基づいて、所定の時間までリビッド位置要求メッセージ120A(支援データを備えていないメッセージ)の送信を遅らせる。その他の場合は、時間aから時間fまでのイベントおよびメッセージ・フローは、図17を参照して上で説明されたものと同一であり、説明は繰り返されない。
【0108】
このシーケンスが図17と異なるのは時間gにおいてであり、ここにおいて、追加のRRメッセージ130は、現在のRRLPセッションをアボートさせる。言い換えると、RRLP測位要求メッセージ120は、(例えば、RRLP測位要求メッセージ120は、支援データを含むので長いから)ネットワークの出力キューにおいて内部的にプリエンプトされていた可能性がある。いずれの場合も、MS10は、現在開いているRRLPセッションを有しておらず、また位置を備えて返信せよとの命令も有していない。
【0109】
ネットワーク70は、位置確定を備えて返答するためにちょうど十分な時間をMS10に与えるために計算された時間まで、リビッド・メッセージ120Aを送ることを遅らせるので、位置確定は、ネットワーク70がこれを報告することができるようにジャスト・イン・タイムに受信される。アボートされているまたはプリエンプトされている先のRRLPセッションに基づいて、ネットワーク70は、第1のモードから第2のモードへ切り替わることを決定してもよい。第1のモードにおいて、ネットワーク70は、早まって一時停止されたRRLPセッションに基づいてリビッドを送り、およびわかったら直ちにリビッド位置要求メッセージを送る。すなわち、ネットワーク70は、次の位置要求メッセージのタイミングを、過去のイベント、すなわち、追加のRRメッセージの完了および可及的速やかな位置要求メッセージを再送信するニーズに基づかせている。
【0110】
この第2のモードにおいて、ネットワーク70は、リビッド位置要求メッセージをすぐには送らない。その代わり、ネットワーク70は、位置応答が必要とされるときに基づく時間の間有利に待機する。すなわち、リビッド位置要求メッセージのタイミングを過去のイベントに基づかせるのではなく、その送信は、将来のイベントに基づいている。例えば、次の位置要求のタイミングは、位置確定が必要とされるときに基づいている(例えば、残りのNW応答時間に基づいている)。
【0111】
RRLP測位要求メッセージ120が送信されるときのタイミングは、ネットワーク70において位置確定が必要とされる時間の前の所定の時間に基づいていてもよい。図示されている例において、所定の時間は、ネットワーク70によって位置情報が必要とされる前の8秒(NW応答時間 = 3)にセットされている。他の所定の時間が使用されてもよい。例えば、様々な移動局の経験的なデータに基づいて他の所定の時間が使用されてもよい(例えば、NW応答時間は、1、2、4、8、または16秒にセットされてもよい)。ネットワーク70は、メッセージがこの将来の時間に送信されるように、タイマーをセット、または測定要求メッセージをスケジュールしてもよい。
【0112】
時間h(t = 32)において、ネットワーク70は、遅れを終了し、リビッドRRPL測位要求メッセージ120Aを送る。示唆されているように、メッセージは、支援データを含んでいない。代替的に、リビッドRRPL測位要求メッセージ120Aを送る際の遅れが少し短くされ、応答時間(NW応答時間)が少し増され、およびメッセージ120Aが若干の支援データを含むことができるかもしれない。さらに、MS10によって使用される正確度パラメーターは、MS10が標準ネットワークの値を上書きすることによるか、またはネットワーク70によって一時的に不確実度の値とするかのいずれかによって大きな不確実度の値(例えば、245.5メートル)にセットされてもよい。MS10は、その活動タイマーをネットワーク提供の応答時間(Act_timer = NW応答時間)にリセットする。
【0113】
この例において、移動加入者の活動タイマーは、4秒(Act_timer = 4秒)で終了するようセットされていたが、このタイマーは、受信された時間に基づいてリセットされる(Act_timer = NW応答時間 = 8秒に変更する)。MS10は、この応答時間をネットワーク提供の応答時間(Act_RT = NW応答時間 = 8秒)にセットしてもよい。時間i(t = 36)において、MS10は、RRLP測位要求メッセージ122により、決定された位置を報告し、その後、GPSエンジンをシャットダウンする。
【0114】
図20は、ネットワーク70がジャスト・イン・タイムの測定要求メッセージを送信するが、支援データ・メッセージの先のリビッドは、ネットワーク提供の正確度をMS10に使用させるというシナリオを示している。時間aからdにおけるイベントおよびメッセージは、図19のものと同一である。時間eにおいて、セッションは、追加のRRメッセージ144によりアボートされる。同様に、ネットワークは、メッセージ144の移行をプリエンプトすることができる。時間fおよびgにおいて、支援データは、リビッドRRLP支援データ・メッセージ144Aとして送られ、およびRRLP支援データAckメッセージ146により受領確認される。リビッド・メッセージは、第1の支援データ・メッセージ(図示されていない)のリビッド、第2の支援データ・メッセージ(図示されているように)、または任意の他のセグメント化された一連の支援データ・メッセージ(図示されていない)であってもよい。
【0115】
時間h(t = 20)において、ネットワーク70は、上で説明されたように測定報告メッセージのジャスト・イン・タイムの受信のためにRRLP測位要求メッセージ120を送る。MS10は、その活動タイマーをネットワーク提供の応答時間(Act_timer = NW応答時間 = 16秒)にセットしてもよく、その応答時間をネットワーク提供の応答時間(Act_RT = NW応答時間 = 16秒)にセットしてもよく、およびその正確度をネットワーク提供の正確度(Act_Accuracy = NW正確度 = 51.2メートル)にセットしてもよい。
【0116】
前の例において、MS10は、一時的な値である正確度値を通常使用する。この一時的な値は、標準ネットワーク正確度よりも大きいかまたは小さいかのいずれかである異なる値である。この例において、標準ネットワーク正確度は、異なる値を使用することの例外として使用される。最後に、時間i(t = 36)において、MS10は、RRLP測位要求メッセージ122の中で、決定された測定を報告する。
【0117】
ある場合において、ネットワーク70は、リビッドの発生を(アボーションまたはプリエンプションにより)検出してもよい。この場合、ネットワーク70は、ネットワーク提供の正確度を一時的な値から標準ネットワーク正確度へ修正する。代替的に、MS10は、リビッド支援データ・メッセージの発生を(アボーションにより)検出してもよく、およびこのイベントに基づいて、MSは、その値からその正確度を修正する。代替的に、MSは、以前のRRLPメッセージからの測定された時間に基づいて、受信した測位要求メッセージが遅れていると決定してもよい。
【0118】
図21は、前の4つの図を参照して説明されたような標準ネットワーク正確度から正確度パラメーターを修正することに関係するフローチャートを示している。700において、MS10がRRLP測位要求メッセージ120を受信した後、メッセージ120が時間どおりに送られて受信されたかどうかの決定がなされる。この決定は、上で説明されたように、時間に基づいて(例えば、ある予測通信時間)、アボーションに基づいて、またはプリエンプションに基づいて、MS10によってまたはネットワーク70によってなされてもよい。RRLP測位要求メッセージ120が時間どおりである場合、処理は、ステップ710において継続する。
【0119】
ステップ710において、MS10は、最大性確度のために通常の正確度よりも高い正確度(例えば、0メートル)を使用するか、またはより正確な応答のために標準ネットワーク正確度よりも少ない選択された小さい値(例えば、1メートルと0メートルの間の値、または0メートルと標準ネットワーク正確度の値との間の値)を使用する。
【0120】
RRLP測位要求メッセージ120が遅れる場合、正確度が標準ネットワーク正確度にセットされてもよい(図示されていない)。代替的に、RRLP測位要求メッセージ120が遅れる場合、ステップ720において処理が継続される。メッセージ120がわずかに遅れているかまたは非常に遅れているかどうかを決定するために、他のテストがステップ720において行われることができる。例えば、RRLP測位要求メッセージ120は、支援データ・メッセージのリビッドがなされたら、少し遅れると決定されてもよい。RRLP測位要求メッセージ120は、以前のRRLP測位要求メッセージのリビッドがなされたら、非常に遅くなると決定されてもよい。代替的に、RRLP測位要求メッセージ120は、第1の所定の時間(例えば、24秒)よりも後、かつ、第2の所定の時間(例えば、、36秒)よりも前に通信される場合、少し遅れると決定されてもよい。RRLP測位要求メッセージ120は、第2の所定の時間よりも後に通信される場合、非常に遅くなると決定されてもよい。ステップ730において、MS10は、標準ネットワーク正確度(つまり、NW正確度)を使用する。ステップ740において、MS10は、その位置応答を早めるためにより低い正確度値(例えば、100、200、または250メートル)を使用する。
【0121】
図22は、本件発明の実施形態にしたがって、付加価値サービス(VAS)のためのメッセージ・フローを示している。VASの場合、MS10は、NW応答時間の全部の時間を使用する必要は無い。
【0122】
時間a(t = 0)において、ネットワーク70は、VASが起動されていると決定する。これを受けて、ネットワーク70は、RRLP支援データ・メッセージ140を送る。RRLP支援データ・メッセージ140を受信すると、MS10は、自分のGPSエンジンを始動し、その活動タイマーを所定の値にセットする(ESコールのケースで使用される値よりもより大きい値、例えば、Act_timer = 45秒)。さらに、RRLP支援データ・メッセージ140の受信に応じて、MS10は、時間bにおいて、RRLP支援データAckメッセージ142を送る。時間cおよびdにおいて、支援データの追加のセグメントが通信されてもよく、およびRRLP支援データ・メッセージ144およびRRLP支援データAckメッセージ146の追加のペアにより受領確認されてもよい。
【0123】
時間e(t = 20、Act_timer = 25)において、ネットワーク70は、標準ネットワーク時間(例えば、NW応答時間 = 16秒)および標準ネットワーク正確度の値(例えば、NW正確度 = 51.2メートル)を備えるRRLP測位要求メッセージを準備する。ネットワーク70は、RRLP測位要求メッセージ120を送り、MS10は、RRLP測位要求メッセージ120を受信する。ESコールと異なり、MS10は、ネットワークに提供されるいかなるパラメーターも廃棄しない。MS10は、その活動タイマー、活動応答タイマー、および活動正確度パラメーターをネットワーク提供の値にセットする(つまり、それぞれ、Act_timer = NW応答時間、Act_RT = NW応答時間、およびAct_Accuracy = NW正確度である。)。
【0124】
時間f(t = 34、Act_timer = 2)において、MS10は、RRLP測位要求メッセージ122で、ネットワーク70にその決定された位置を送る。この場合、MSは、位置不確実度が、要求されたネットワーク正確度よりも低いため、ネットワーク応答時間の満了の前に決定された確定を送った。最後に、決定された確定の報告に応答して、MS10は、GPSエンジンをシャットダウンする。
【0125】
本件発明は、添付の特許請求の範囲の要旨および範囲内で修正および変更して実行されてもよいということが理解されるべきである。本説明は、網羅的なものであるように意図されておらず、また開示された厳密な形式に制限されるようにも意図されていない。本件発明は、修正および変更して実行されることができるということが理解されるべきである。
【関連出願の参照】
【0001】
本件出願は、米国特許法119条(e)に基づいて、2007年9月11日付けの「GSM (登録商標)Control Plane Positioning Preemption RRLP Implementation for MS and SMLC」という名称の米国仮出願第60/971,453号(代理人文書番号072346P1)および2007年12月6日付けの「GSM Control Plane Positioning Preemption RRLP Implementation for MS and SMLC」という名称の米国仮出願第61/012,039号(代理人文書番号072346P2)を基礎として優先権を主張するものであって、これらの米国仮出願の開示は、その全体が参照によって本件出願の明細書に明白に組み込まれている。
【技術分野】
【0002】
本件発明は、一般に通信システムに関係し、より詳細には、全地球航法衛星システムを使用する位置決定を強化することに関係する。
【背景技術】
【0003】
移動局(例えば、セルラー電話)の位置を知ることは、しばしば望ましく、時には必要である。英語の「location(位置、位置決め)」および「position(位置)」という用語は、同義語であり、本件明細書では区別することなく使用される。例えば、ユーザーは、移動局(MS)を利用してウェブサイトをブラウジングし、位置に敏感なコンテンツをクリックする。そうすると、移動局の位置が決定され、その位置がユーザーに適切なコンテンツを提供するために使用される。移動局の位置を知っていることが有用または必要となる場面が他にも多くある。例えば、FCCの911命令は、911救急サービス・コールをしている移動局を地理的に探し当てることを含む強化された911サービスを提供するよう通信事業者に要求する。移動局は、ホーム・ネットワークから位置決めサービスを得ることができるように、および訪れたネットワーク内でローミングする間にも位置決めサービスを得ることができるように、備えられることができる。移動局は、必要なときにいつでも移動局の位置を決定するためにホーム・ネットワーク内の様々なネットワーク・エンティティと通信することができる。
【0004】
ワイヤレス・ネットワーク内の移動局の位置を計算するために様々な異なるタイプの技術が採用されるが、成功レベルおよび正確度はまちまちである。ネットワーク・ベースの方法は、少なくとも2つの塔を使用する到着角度(AOA)、マルチラテレーション(multilateration)を使用する到着時差(TDOA)、および移動局が既知の位置で示すRFパターンをマッチングするためのRFフィンガープリンティングを使用する位置署名を含んでいる。様々な移動局ベースの方法は、GPS、A-FLT(Advanced Forward Link Trilateration)、TA/NMR(Timing Advance/Network Measurement Report)および/またはE-OTD(Enhanced Observed Time Difference)を組み込んでいる。
【0005】
もう1つの移動局ベースの方法は、支援型GPS(A-GPS)である。A-GPSでは、移動局が、低い初期位置算出時間(TTFF)を有し、弱い信号の獲得を許可し、および移動局のバッテリー使用を最適化するために、サーバーは、移動局に支援データを提供する。A-GPSは、範囲のようなものの測定を提供する他の測位技術と分離または混成した位置決め技術として使用される。A-GPSサーバーは、ワイヤレス移動局に移動局のおおよその位置に特有のデータを提供する。支援データは、移動局が衛星に速くロックオンすることを支援し、潜在的には、ハンドセットが弱い信号にロックオンすることを可能にする。移動局は、その後、位置計算を行なうか、または位置計算を行うためにサーバーへ測定コード位相を選択的に戻す。A-GPSサーバーは、そのような位置計算を行なうことができない場合、例えば、GPS衛星が十分見えない場合、位置計算のためにセルラー基地局から移動局までの往復タイミング測定のような追加情報を使用することができる。
【0006】
衛星ベースの全地球測位システム(GPS)、タイミング・アドバンス(TA)、および地球上ベースのE-OTD(Enhanced Observed Time Difference)の位置決定技術の進歩は、移動局の地理的位置(例えば、緯度および軽度)の厳密な決定を可能にする。ワイヤレス通信ネットワーク内は地理的位置決めサービスが展開されているので、そのような位置情報は、ネットワーク・エレメントに記憶され、シグナリング・メッセージを使用してネットワーク内のノードに配信されてもよい。そのような情報は、サービング・モバイル位置決めセンター(SMLC)、独立型SMLC(SAS)、位置決定エンティティ(PDE)、安全なユーザー・プレーン位置決めプラットフォーム(SLP)および特別な目的の移動加入者位置決めデータベースに記憶されてもよい。
【0007】
特殊目的のモバイル加入者位置決めデータベースの1つの例は、第3世代パートナーシップ・プロジェクト(3GPP)によって提案されたSMLCである。特に、3GPPは、SMLCへおよびSMLCからモバイル加入者位置情報を通信するためのシグナリング・プロトコルを定義している。このシグナリング・プロトコルは、無線資源LCS(位置決めサービス)プロトコルと呼ばれ、RRLPと表記され、およびモバイル加入者の位置に関係したSMLCと移動局との間で通信されるシグナリング・メッセージを定義する。RRLPプロトコルの詳細な説明は、3GPPのTS44.031 v7.9.0(2008-06)3世代パートナーシップ・プロジェクト:技術的規格グループGSMエッジ無線接続ネットワーク:位置決めサービス(LCS):移動局(MS)−サービング・モバイル位置決めセンター(SMLC)無線資源LCSプロトコル(RRLP)(第7版)に記載されている。
【0008】
米国の全地球測位システム(GPS)に加えて、ロシアのGLONASSシステム、またはヨーロッパのガリレオ・システム計画のような他の衛星測位システム(SPS)もまた、移動局の位置決めのために使用されることができる。しかしながら、各々のシステムは、異なる規格にしたがって作動する。
【0009】
衛星ベースの位置決めシステムの1つの弱みは、正確な位置決定を獲得するためにかかる時間である。典型的に、位置の正確度は、その計算速度のためにトレードオフされ、逆に計算速度を上げようとすると位置の正確度が犠牲にされる。すなわち、より正確な位置決定にはより多くの時間がかかる。したがって、強化された正確度を含む位置決めのためにさらなる効率性および利点を提供するために2つ以上の衛星から送られる衛星信号に基づいて移動局の位置を決定することができる全地球ナビゲーション衛星システム(GNSS)を含む通信システムに対するニーズがある。例えば、救急サービス(ES)コールまたは付加価値サービス(VAS)セッションの間に、獲得スピードまたは移動局の位置決定を獲得する最終的な獲得時間を害することなく正確度を強化するというニーズがある。
【発明の概要】
【0010】
本件発明のいくつかの実施形態は、ワイヤレス・ネットワーク内の移動局の位置データを強化する方法を提供する。前記方法は、移動局において、ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを受信することと、前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択することと、前記選択された正確度を使用して前記移動局の位置データを決定することと、測位要求メッセージに応じる測位応答メッセージを形成することと、ここにおいて、前記測位応答メッセージは、前記位置データを具備する、前記測位応答メッセージを送信することとを具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記方法。前記暫定的正確度が100メートルを超える不確実度を表わす前記方法。前記暫定的正確度がネットワーク正確度よりも高い正確度を表わす前記方法。前記暫定的正確度が10メートルよりも低い不確実度を表わす前記方法。前記暫定的正確度が0メートルの不確実度を表わす前記方法。前記選択する動作が、リビッドが以前に生じたかどうかを決定することを具備する前記方法。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記方法。前記応答メッセージがRRLP測位応答メッセージを具備する前記方法。
【0011】
本件発明のいくつかの実施形態は、ワイヤレス・ネットワーク内の移動局の位置データを強化する方法を提供する。前記方法は、ネットワークにおいて、ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択することと、前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを送信することと、および前記測位要求メッセージに応じる測位応答メッセージを受信することと、ここにおいて、前記測位応答メッセージは、位置データを具備する、を具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記方法。前記暫定的正確度が100メートルを超える長さの不確実度を表わす前記方法。前記暫定的正確度がネットワーク正確度より高い正確度を表わす前記方法。前記暫定的正確度が10メートルよりも低い不確実度を表わす前記方法。前記暫定的正確度が0メートルの不確実度を表わす前記方法。前記選択する動作が、リビッドが以前に生じたかどうかに基づいて、選択された正確度を決定することを具備する前記方法。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記方法。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記方法。
【0012】
本件発明のいくつかの実施形態は、ワイヤレス・ネットワーク内の移動局の位置データを強化するための移動局を提供する。前記移動局は、ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを受信するための受信機と、前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択するための論理と、前記選択された正確度を使用して前記移動局の位置データを決定するための位置決めエンジンと、前記測位要求メッセージに応じる測位応答メッセージを形成するための論理であって、前記測位応答メッセージは、前記位置データを具備する、論理と、前記測位応答メッセージを送信するための送信機とを具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記移動局。前記暫定的正確度がネットワーク正確度より高い正確度を表わす前記移動局。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記移動局。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記移動局。
【0013】
本件発明のいくつかの実施形態は、ワイヤレス・ネットワーク内の移動局の位置データを強化させるためのネットワークを提供する。前記ネットワークは、ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択するための論理と、前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを送信するための送信機と、および前記測位要求メッセージに応じる測位応答メッセージを受信するための受信機であって、前記測位応答メッセージは、位置データを具備する、受信機とを具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記ネットワーク。前記暫定的正確度がネットワーク正確度より高い正確度を表わす前記ネットワーク。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記方法。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記方法。
【0014】
本件発明のいくつかの実施形態は、ワイヤレス・ネットワーク内の移動局の位置データを強化するための移動局を提供する。前記移動局は、ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを受信する手段と、前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択するための手段と、前記選択された正確度を使用して前記移動局の位置データを決定する手段と、前記測位要求メッセージに応じる測位応答メッセージを形成する手段であって、前記測位応答メッセージは、前記位置データを具備する、手段と、前記測位応答メッセージを送信する手段とを具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記移動局。前記暫定的正確度がネットワーク正確度より高い正確度を表わす前記移動局。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記移動局。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記移動局。
【0015】
本件発明のいくつかの実施形態は、ワイヤレス・ネットワーク内の移動局の位置データを強化するためのネットワークを提供する。前記ネットワークは、ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択する手段と、前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを送信する手段と、および前記測位要求メッセージに応じる測位応答メッセージを受信する手段であって、前記測位応答メッセージは、位置データを具備する、手段とを具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記ネットワーク。前記暫定的正確度がネットワーク正確度より高い正確度を表わす前記ネットワーク。前記選択する手段が、リビッドが以前に生じたかどうかに基づいて、選択される正確度を決定する手段を具備する前記ネットワーク。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記ネットワーク。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記ネットワーク。
【0016】
本件発明のいくつかの実施形態は、以下のものを具備するコンピューター可読媒体を具備するコンピューター可読プロダクトを提供する。前記コンピューター可読媒体は、ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを少なくとも1つのコンピューターに受信させるためのコードと、前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を少なくとも1つのコンピューターに選択させるためのコードと、前記選択された正確度を使用して前記移動局の位置データを少なくとも1つのコンピューターに決定させるためのコードと、前記測位要求メッセージに応じる測位応答メッセージを少なくとも1つのコンピューターに形成させるためのコードであって、前記測位応答メッセージは、前記位置データを具備する、コードと、前記測位応答メッセージを少なくとも1つのコンピューターに送信させるためのコードとを具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記コンピューター可読プロダクト。前記暫定的正確度がネットワーク正確度より高い正確度を表わす前記コンピューター可読プロダクト。前記選択された正確度を使用して移動局の位置データを少なくとも1つのコンピューターに決定させるためのコードが、リビッドが以前に生じたかどうかを少なくとも1つのコンピューターに決定させるためのコードを具備する前記コンピューター可読プロダクト。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記コンピューター可読プロダクト。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記コンピューター可読プロダクト。
【0017】
本件発明のいくつかの実施形態は、以下のものを具備するコンピューター可読媒体を具備するコンピューター可読プロダクトを提供する。前記コンピューター可読媒体は、ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を少なくとも1つのコンピューターに選択させるためのコードと、前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを少なくとも1つのコンピューターに送信させるためのコードと、および前記測位要求メッセージに応じる測位応答メッセージを少なくとも1つのコンピューターに受信させるためのコードであって、前記測位応答メッセージは、位置データを具備する、コードとを具備する。前記暫定的正確度がネットワーク正確度よりも低い正確度を表わす前記コンピューター可読プロダクト。前記暫定的正確度がネットワーク正確度より高い正確度を表わす前記コンピューター可読プロダクト。前記ネットワーク正確度と、ネットワーク正確度とは異なる暫定的正確度との間の正確度を少なくとも1つのコンピューターに選択させるためのコードが、リビットが以前に生じたかどうかに基づいて、選択された正確度を少なくとも1つのコンピューターに決定させるためのコードを具備する、前記コンピューター可読プロダクト。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記コンピューター可読プロダクト。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記コンピューター可読プロダクト。ワイヤレス・ネットワーク内のネットワークと移動局との間の測位要求メッセージのリビットを低減する方法であって、前記方法は、所定の時間まで待つことと、ここにおいて、前記所定の時間は、位置データが必要とされる時間に基づく、前記所定の時間に、ネットワーク応答時間およびネットワーク正確度を具備する測位要求メッセージを送信することと、および前記位置データが必要とされる前に、前記位置データを具備する測位応答メッセージを受信することとを具備する。前記ネットワーク応答時間が4秒より長くない短縮された応答時間を表わす前記方法。前記ネットワーク正確度が100メートルよりも多い低い正確度を表わす値を具備する前記方法。前記測位要求が支援データを具備しない前記方法。支援データ・メッセージを送信することと、および支援データAckメッセージを受信することとをさらに具備する前記方法。前記測位要求メッセージがRRLP測位要求メッセージを具備する前記方法。前記測位応答メッセージがRRLP測位応答メッセージを具備する前記方法。
【0018】
本件発明のこれらおよびその他の態様、特徴および利点は、以下で説明される実施形態の参照により明白になるだろう。
【図面の簡単な説明】
【0019】
本件発明の実施形態は、図面を参照して、例のみとして説明される。
【図1A】図1Aは、ワイヤレス・ネットワーク内の様々なコンポーネントおよびインターフェースを示している。
【図1B】図1Bは、ワイヤレス・ネットワーク内の様々なコンポーネントおよびインターフェースを示している。
【図1C】図1Cは、ワイヤレス・ネットワーク内の様々なコンポーネントおよびインターフェースを示している。
【図2】図2は、RRLPセッションを使用する典型的な位置決めプロセスのメッセージ・フローを示している。
【図3】図3は、支援データの擬似セグメント化を示している。
【図4】図4は、MSが追加のRRメッセージを受信することに基づいて位置決定を一時停止することを例示している。
【図5】図5は、MSが追加のRRメッセージを受信することに基づいて位置決定を一時停止することを例示している。
【図6】図6は、本件発明の実施形態にしたがって、GPSエンジンを始動およびシャットダウンするイベントを示している。
【図7】図7は、本件発明の実施形態にしたがって、GPSエンジンを始動およびシャットダウンするイベントを示している。
【図8】図8は、本件発明の実施形態にしたがって、早めの位置決定を強調表示するメッセージ・フローを示している。
【図9】図9は、本件発明の実施形態にしたがって、追加のRRメッセージが受信された後に位置決定を継続する方法を例示している。
【図10】図10は、本件発明の実施形態にしたがって、追加のRRメッセージが受信された後に位置決定を継続する方法を例示している。
【図11】図11は、本件発明の実施形態にしたがって、ダウンロードされた支援データを最適に配列する方法を例示している。
【図12】図12は、本件発明の実施形態にしたがって、ダウンロードされた支援データを最適に配列する方法を例示している。
【図13】図13は、本件発明の実施形態にしたがって、ジャスト・イン・タイムの位置要求を送る方法を示している。
【図14】図14は、本件発明の実施形態にしたがって、ジャスト・イン・タイムの位置要求を送る方法を示している。
【図15】図15は、本件発明の実施形態にしたがって、アボイドされるセッションを回避するために新しいRRメッセージを遅らせる(または、落とす)方法を示している。
【図16】図16は、本件発明の実施形態にしたがって、アボイドされるセッションを回避するために新しいRRメッセージを遅らせる(または、落とす)方法を示している。
【図17】図17は、本件発明の実施形態にしたがって、救急サービス(ES)コールにおける応答時間と正確度とのバランスを図るために正確なパラメーターを変える方法を例示する。
【図18】図18は、本件発明の実施形態にしたがって、救急サービス(ES)コールにおける応答時間と正確度とのバランスを図るために正確なパラメーターを変える方法を例示する。
【図19】図19は、本件発明の実施形態にしたがって、救急サービス(ES)コールにおける応答時間と正確度とのバランスを図るために正確なパラメーターを変える方法を例示する。
【図20】図20は、本件発明の実施形態にしたがって、救急サービス(ES)コールにおける応答時間と正確度とのバランスを図るために正確なパラメーターを変える方法を例示する。
【図21】図21は、本件発明の実施形態にしたがって、救急サービス(ES)コールにおける応答時間と正確度とのバランスを図るために正確なパラメーターを変える方法を例示する。
【図22】図22は、本件発明の実施形態にしたがって、付加価値サービス(VAS)のためのメッセージ・フローを示している。
【発明の詳細な説明】
【0020】
以下の説明において、本件発明の様々な実施形態を例示する添付の図面への言及がなされる。他の実施形態が利用されてもよく、本件開示の要旨および範囲から逸脱することなく機械的、構成上、構造上、電気的、および操作上の変更がなされてもよいことが理解される。以下の詳細な説明は、制限的意味で捉えられるべきではない。さらに、以下の詳細な説明のいくつかの部分は、電子回路またはコンピューター・メモリーにおいて行なわれることができる、手順、ステップ、論理ブロック、処理、およびデータビット上のオペレーションの他のシンボリック表現の観点で提供される。
【0021】
手順、コンピューター実行ステップ、論理ブロック、プロセスなどは、本件明細書において、所望の結果に至る自己矛盾のない一連のステップまたは命令となるよう考えられている。前記ステップは、物理的数量の物理的操作を利用するステップである。これらの数量は、電子回路またはコンピューター・システムにおいて記憶、送信、結合、比較、およびその他の場合操作されることができる電気、磁気、または無線信号の形式をとってもよい。これらの信号は、ビット、値、エレメント、シンボル、文字、用語、数字などと時々呼ばれてもよい。各々のステップは、ハードウェア、ソフトウェア、ファームウェア、またはそれらの組み合わせによって行われてもよい。ハードウェア実装において、例えば、処理ユニットは、1つまたは複数の特定用途集積回路(ASIC)、デジタル信号プロセッサー(DPS)、デジタル信号処理デバイス(DSP)、プログラム可能な論理デバイス(PLD)、フィールド・プログラム可能なゲート・アレー(FPGA)、プロセッサー、コントローラー、マイクロ・コントローラー、マイクロプロセッサー、電子デバイス、本件明細書において説明される機能を行なうように設計された他のデバイス・ユニット、および/またはそれらの組み合わせにおいて実装されてもよい。
【0022】
この発明の詳細な説明の全体にわたって、「1つの例」、「1つの特徴」、「ある例」、または「ある特徴」に関してなされる言及は、特徴および/または例に関係して説明される特定の特徴、構造、または特性が特許請求の範囲の主題の少なくとも1つの特徴および/または例に含まれる、ということを意味する。したがって、本件発明の詳細な説明の全体にわたって様々な箇所で使用されている「1つの例において」、「ある例」、「1つの特徴において」、または「ある特徴」というフレーズがすべて同じ特徴および/または例に関して言及している必要はない。さらに、特定の特徴、構造、または特性は、1つまたは複数の例および/または特徴に組み込まれてもよい。
【0023】
本件明細書において「命令」と呼ばれる用語は、1つまたは複数の論理操作を表わす表現に関係する。例えば、命令は、1つまたは複数のデータ・オブジェクト上で1つまたは複数のオペレーションを実行するための機械によって解釈可能であることにより「機械可読」であってもよい。しかしながら、これは、命令の単なる例であり、特許請求の範囲の主題は、この点で制限されない。他の例において、本件明細書において言及される命令は、符号化されたコマンドを含むコマンド・セットを有する処理回路によって実行可能である符号化されたコマンドに関係してもよい。そのような命令は、処理回路によって理解される機械言語の形式で符号化されてもよい。改めて、これらは、命令の単なる例であり、特許請求の範囲の主題は、この点で制限されない。
【0024】
本件明細書において言及される「記憶媒体」は、1つまたは複数の機械によって認識可能である表現を保つことができる物理的メディアに関係する。例えば、記憶媒体は、機械可読命令および/または情報を記憶するための1つまたは複数の記憶装置を具備してもよい。そのような記憶装置は、例えば、磁気、光学、または半導体記憶媒体を含む様々なメディア・タイプのいずれか1つを具備してもよい。そのような記憶媒体はまた、長期間、短期間、揮発性または非揮発性メモリー装置の任意のタイプを具備してもよい。しかしながら、これらは、記憶媒体の単なる例であり、特許請求の範囲の主題は、これらの点で制限されない。「記憶媒体」という用語は、真空状態には適用されない。
【0025】
特にことわりのないかぎり、以下の議論から明白であるように、「処理する(processing)」、「算出する(computing)」、「計算する(calculating)」、「選択する(selecting)」、「形成する(forming)」、「イネーブルにする(enabling)」、「禁止する(inhibiting)」、「位置を探す(locating)」、「終了する(terminating)」、「識別する(identifying)」、「開始する(initiating)」、「検出する(detecting)」、「獲得する(obtaining)」、「ホスティングする(hosting)」、「維持する(maintaining)」、「表示する(representing)」、「推定する(estimating)」、「受信する(receiving)」、「送信する(transmitting)」、「決定する(determining)」および/または同様の用語のような本件詳細な説明の全体を通して利用される用語は、物理的電子および/または磁気的数量および/またはコンピューティング・プラットフォームのプロセッサー、メモリー、レジスター、および/または他の情報記憶、送信、受信および/またはディスプレイ装置内の物理的数量として表わされるデータを操作するおよび/または変換するコンピューターまたは同様の電子計算装置のようなコンピューティング・プラットフォームによって行われることができるアクションおよび/またはプロセスをさすものとすることが認識される。そのようなアクションおよび/またはプロセスは、例えば、記憶媒体に記憶される機械可読命令の制御の下でコンピューティング・プラットフォームによって実行されてもよい。そのような機械可読命令は、例えば、コンピューティング・プラットフォームの一部として含まれる(例えば、処理回路またはそのような処理回路の外部の一部として含まれる)記憶媒体に記憶されるソフトウェアまたはファームウェアを具備してもよい。さらに、特にことわりのない限り、フロー図への言及があろうとなかろうと、本件明細書において説明されるプロセスはまた、そのようなコンピューティング・プラットフォームによってすべてまたは部分的に実行および/または制御されてもよい。
【0026】
本件明細書において説明されるワイヤレス通信技術は、ワイヤレス・ワイド・エリア・ネットワーク(WWAN)、ワイヤレス・ローカル・エリア・ネットワーク(WLAN)、ワイヤレス・パーソナル・エリア・ネットワーク(WPAN)などのような様々なワイヤレス通信ネットワークに関係していてもよい。「ネットワーク」および「システム」という用語は、本件明細書において区別なく使用されてもよい。WWANは、符号分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直行周波数分割多元接続(OFDM)ネットワーク、単一搬送波周波数分割多元接続(SC-FDMA)ネットワークなどであってもよい。CDMAネットワークは、いくつかの無線技術を挙げると、cdma2000または広帯域CDMA(W-CDMA)のような1つまたは複数の無線接続技術(RAT)を実装してもよい。ここで、cdma2000は、IS-95、IS-2000、およびIS-856標準にしたがって実装される技術を含んでもよい。TDMAネットワークは、移動通信のためのグローバル・システム(GSM)、デジタル・アドバンスド移動電話システム(D-AMPS)、またはいくつかの他のRATを実装してもよい。GSMおよびW-CDMAは、「第3世代パートナーシップ・プロジェクト」(3GPP)という名称の企業共同体からの文献において説明されている。cdma2000は、「第3世代パートナーシップ・プロジェクト2」(3GPP2)という名称の企業共同体からの文献において説明されている。3GPPおよび3GPP2の文献は、公に利用可能である。例えば、WLANは、IEEE802.11xネットワークを具備してもよく、およびWPANは、ブルートゥース・ネットワーク、IEEE802.15xを具備してもよい。本件明細書において説明されるワイヤレス通信実装はまた、WWAN、WLANおよび/またはWPANの任意の組み合わせに関係して使用されてもよい。
【0027】
デバイスおよび/またはシステムは、衛星から受信した信号に少なくとも部分的に基づいてデバイスの位置を推定してもよい。特に、そのようなデバイスおよび/またはシステムは、関連する衛星とナビゲーション衛星受信機との間の距離の近似を具備する「擬似範囲」測定を得ることができる。特定の例において、そのような擬似範囲は、衛星測位システム(SPS)の一部として1つまたは複数の衛星からの信号を処理することができる受信機において決定されてもよい。そのようなSPSは、いくつか例を挙げると、例えば、全地球測位システム(GPS)、ガリレオ、グロナス(Glonass)、または今後開発される任意のSPSを具備してもよい。その位置を決定するために、衛星ナビゲーション受信機は、3つ以上の衛星の送信時の位置のみならず、それらに関する擬似範囲をも得ることができる。衛星の軌道パラメーターを知っていると、いかなる時点についてもこれらの位置が計算されることができる。擬似範囲の測定は、その後、衛星から受信機までの、信号が移動する時間掛ける光の速度に少なくとも部分的に基づいて決定されてもよい。本件明細書において説明される技術は、特定の例としてSPSのGPSのタイプおよび/またはガリレオタイプで決定される位置決め実装として提供されてもよいが、これらの技術は、SPSの他のタイプに適用されてもよく、および特許請求の範囲の主題は、この点で制限されないことが理解されるべきである。
【0028】
本件明細書において説明される技術は、例えば、前述のSPSを含むいくつかのSPSのいずれか1つにより使用されてもよい。さらに、そのような技術は、擬似衛星または衛星と擬似衛星との組み合わせを利用する測位決定システムにより使用されてもよい。擬似衛星は、擬似ランダム雑音(PRN)符号またはL帯域(または他の周波数)搬送波信号上で変調される他の範囲符号(例えば、GPSまたはCDMAセルラー信号と同様)をブロードキャストする地上ベースの送信機を具備してもよい。それは、GPS時間と同期されてもよい。そのような送信機は、遠隔受信機による識別を可能とするように固有のPRN符号を割り当てられてもよい。擬似衛星は、トンネル、鉱山、建物、都会の峡谷または他の閉鎖されたエリアのような軌道衛星からのSPS信号が利用不能でありうる状況において役立つかもしれない。擬似衛星の他の実装は、ラジオビーコンとして知られている。本件明細書において使用されているような「衛星」という用語は、擬似衛星、擬似衛星の同等物、およびもしかすると他の物を含むよう意図される。本件明細書において使用されているような「SPS信号」という用語は、擬似衛星または擬似衛星の同等物からのSPSのような信号を含むよう意図される。
【0029】
本件明細書において使用されるように、携帯移動装置または移動局(MS)は、時間ごとに変化する位置を有しうるデバイスのことを言う。位置の変化は、いくつかの例として、方向、距離、交信角度などについての変化を具備してもよい。特定の例において、移動局は、セルラー電話、ワイヤレス通信装置、ユーザー設備、ラップトップ・コンピューター、その他のパーソナル通信システム(PCS)装置、および/またはその他の携帯通信装置を具備してもよい。移動局はまた、機械可読命令によって制御される実行機能に適合させられるプロセッサーおよび/またはコンピューティング・プラットフォームを具備してもよい。
【0030】
本件出願は、以下の出願に関係している。各々の出願は、本件出願と時を同じくして出願されており、およびそれらの全体が本件明細書に含まれている。それらの出願は、Kirk Allan Burroughsによる出願「Optimized Ordering of Assistance Data in a Mobile Radio Network」(代理人文書番号072346)、Thomas Rowlandによる出願「Improve GPS Yield For Emergency Calls in a Mobile Radio Network」(代理人文書番号080114)、およびKirk Allan Burroughsによる出願「Delayed Radio Resource Signaling in a Mobile Radio Network」(代理人文書番号080152)である。
【0031】
図1A、1B、および1Cは、ワイヤレス・ネットワークにおける様々なコンポーネントおよびインターフェースを図示する。単純性のために、以下の説明では、ワイヤレス・ネットワークにおいて使用される一般的な用語または特有の標準に関して使用される特有の用語を使用するが、本件明細書において説明される技術は、いくつかの異なるワイヤレス・ネットワーク標準に適用可能であってもよい。例えば、そのようなワイヤレス・ネットワークは、クァルコム社によって開拓され、商業的に開発された大容量デジタル・ワイヤレス技術である符号分割多元接続(CDMA)システムを含む。他のワイヤレス・ネットワークは、代替的デジタル・ワイヤレス技術を使用した移動通信のためのグローバル・システム(GSM)を含む。さらに、他のワイヤレス・ネットワークは、次の世代の大容量デジタル・ワイヤレス技術であるユニバーサル・モバイル電話サービス(UMTS)を含む。
【0032】
図1Aは、移動局(MS10)、基地送受信機局(BTS22)および基地局コントローラー(BSC24)を含む基地局サブシステム(BSS20)、モバイル交換センター(MSC30)、公衆交換電話ネットワーク(PSTN)およびサービング・モバイル位置決めセンター(SMLC)を含む。MS10は、1つまたは複数の基地局と通信するための基地帯域モデムを有するセル電話のような任意の移動ワイヤレス通信である。本件開示において参照されるMSは、位置決定能力を提供するために、GPS受信機または同等の受信機を含む。以下において使用されるGPSという用語は、衛星または擬似衛星システムを意味するよう包括的な意味で使用される。MS10およびBTS22は、Umインターフェースと呼ばれるRF空間インターフェース上でワイヤレスに通信する。1つまたは複数のMS10は、一度にBTS22またはBSS20と通信してもよい。BSS20の内部において、BTS22は、Abisインターフェース上でBSC24に通信してもよい。1つのBSC24は、配信されたネットワーク内でいくつかのBTS22をサポートしてもよい。ここにおいて、ネットワーク(ダウンリンク)からおよびMS10(アップリンク)からのUm空間インターフェース・メッセージを参照するとき、これらのメッセージは、BTS22を使用して通信されている、または同等にBSS20を使用して通信されていると呼ばれてもよい。Lbインターフェースは、BSC24をSMLC50と結合する。Lbインターフェース・ダウンリンクおよびアップリンク・メッセージを参照するとき、これらのメッセージは、BSC24を使用して通信されている、または同等にBSS20を使用して通信されていると呼ばれてもよい。1つまたは複数のBSC24および/またはBSS20は、インターフェースAを使用してMSC30に結合されてもよい。MSC30は、音声コールを公衆ネットワークに提供するためにPSTN40からMS10への交換回路を接続する。その他のネットワーク・エレメントまたはネットワーク・コンポーネントは、他のサービスを提供するためにBSS20、MSC30、およびPSTN40に接続されてもよい。
【0033】
例えば、SMLC50は、位置決めサービスを提供するためにネットワークに結合されてもよく、およびLbインターフェース上でBSC24に接続されて図示されている。SMLC50はまた、MSC30およびLsインターフェースを介してワイヤレス・ネットワークに接続されてもよい。SMLC50は、移動局を探し出すための全体的な連携を提供し、および最終的に推定される位置および推定される達成された正確度を計算することができる。SMLC50は、CDMAネットワーク内の位置決定エンティティ(PDE)、GSMネットワーク内のサービング・モバイル位置決めセンター(SMLC)、およびWCDMAセルラー・ネットワーク内の独立の(A-GPS)SMLC(SAS)と呼ばれてもよい測位サーバーを一般的に意味するよう本件明細書において使用される。
【0034】
典型的に、測位サーバーは、GPSに関係する情報をMSと交換することができる1つまたは複数のGPS基準受信機と一緒に働くワイヤレス・ネットワーク内のシステム源(例えば、サーバー)である。MS支援されたA-GPSセッションにおいて、測位サーバーは、信号獲得プロセスを強化するためにMSへGPS支援データを送る。MSは、測位サーバーに擬似範囲測定を返してもよく、その後、測位サーバーは、MSの位置を計算することができる。代替的に、MSベースのA-GPSセッションにおいて、MSは、測位サーバーに計算した位置の結果を送り返す。
【0035】
図1Bは、UmおよびLbインターフェースの階層型モデルを図示する。MS10(ターゲットMS)における層は、物理層、層1またはL1と呼ばれる第1の層、L2(LAPDm)と呼ばれる第2の層、GSM04.08仕様の後にモデル化された無線資源(RR)層とよばれる第3の層、および最後にアプリケーション層を含む。この場合、アプリケーション層は、GSM04.31およびGSM04.35勧告において定義されている無線資源位置決めプロトコル(RRLP)である。BSS20(BSC24として図示されている)は、BSS20を通り抜けるRRLPメッセージと対応する、L1、L2(LAPD)およびRR層を含む階層型モデルを有する。BSS20は、Lbインターフェース上でSMLC50に要求されるような低域層を中継する。前記層は、SMLC50内のMTP、SCCP、BSSLAP-LE、およびBSSLAP層に対応するMTP、SCCP、BSSLAP-LEおよびBSSLAP層を含む。BSSAP-LEおよびBSSLAPインターフェースに関する追加の情報については、GSM09.21およびGSM08.71勧告を参照せよ。
【0036】
ネットワーク・エレメントからネットワーク・エレメントへ通過するメッセージは、複数の異なるインターフェースおよび対応するプロトコルを通り抜けてもよい。例えば、測位サーバーSMLC50からBSS20を通ってMS10へ通過するメッセージは、Lbインターフェースでは第1のメッセージとして、Abisインターフェースではもしかすると他のメッセージとして、およびUmインターフェースでは最後のメッセージとして通信される。一般に、本件開示において、メッセージは、簡単化のために、そのアプリケーション層および空間インターフェースの名前で呼ばれるであろう。例えば、測位サーバーSMLC50からMS10に向けられる要求は、RRLP測位要求の空間インターフェースUmアプリケーション層の名前で呼ばれてもよい。追加的に、明確にするために、BSS20およびSMLC50は、集合的にネットワーク70と呼ばれてもよく、ネットワーク70は、BTS22、BSC24およびSMLC50を含んでもよく、またはBSS20およびSMLC50を含んでもよい。
【0037】
図1Cは、通常のRRLPセッションのメッセージ・フローを示している。時間aにおいて、SMLC50は、Lbインターフェースを通ってBSS20に要求メッセージ80を送る。BSS20は、Um空間インターフェースを通ってMS10に送信されるRRLP要求85としてこの要求を再パッケージ化し、転送する。内的に、MS10は、RRLPセッションを開始し、およびRRLP応答メッセージ90によりアップリンクUm空間インターフェースを通って最終的に応答する。BSS20は、Lbインターフェースを通って応答メッセージ95でSMLC50にこの応答を再び再パッケージ化し、転送する。SMLC50は、応答メッセージ95を時間bとして受信する。以下では、SMLC50からのおよびSMLC50へのそのような要求および応答は、RRLP要求およびRRLP応答と呼ばれる。
【0038】
3GPP RRLPのアプリケーション層は、現在5個のメッセージをサポートしている。第1のメッセージは、ダウンリンク上で使用されるRRLP測位要求メッセージである。ネットワーク70は、MS10からの位置測定または位置推定を要求するために、このメッセージを使用する。このメッセージは、MS10のための命令を含み、またMS10のための支援データをも含んでよい。支援データは、以下において追加的に詳細に説明される。第2のメッセージは、アップリンク上で使用されるRRLP測位応答メッセージであり、これはRRLP測位要求メッセージを補完する。MS10は、位置推定情報および他の位置関連情報でネットワーク70に応答するために、このメッセージを使用する。RRLP測位要求メッセージおよびRRLP測位応答メッセージは、RRLPセッションを開始および終了するために一緒に作動する。
【0039】
第3および第4のメッセージもまた、RRLPセッションを開始および終了するために一緒に作動する。第3のメッセージは、ネットワーク70がMS10に支援データを送るために使用するRRLP支援データ・メッセージと呼ばれる他のダウンリンク・メッセージである。支援データは、E-OTD(Enhanced Observed Time Difference)基準BTS情報(例えば、BTSシグナリングおよび位置情報)および最大8個の追加のBTSについてのE-OTD測定情報を選択的に含む。第4のメッセージは、アップリンク上で使用されるRRLP支援データ受領確認(Ack)メッセージである。RRLP支援データAckメッセージは、ネットワーク70にRRLP支援データ・メッセージの受信を受領確認するためにMS10によって単純に使用される。第5のメッセージは、プロトコルにおけるエラーを報告するためにダウンリンク上またはアップリンク上のいずれかで使用されることができるRRLPプロトコル・エラーと呼ばれる典型的なメッセージである。
【0040】
図2は、RRLPセッションを使用する典型的な位置決めプロセスのメッセージ・フローを示している。MS10およびネットワーク70は、クライアントとして作用するMS10およびサーバーとして作用するネットワーク70を備えるクライアント−サーバーモデルとして捉えられてもよい。RRLPセッションは、ネットワーク70からの要求により開始し、MS10からの応答により典型的に終了する。時間aにおいて、位置決めプロセスは、ネットワーク70により開始し、MS10は、RRLP支援データ・メッセージ110を通信する。すなわち、ネットワーク70は、MS10にRRLP支援データ・メッセージ110を送り、MS10は、RRLP支援データ・メッセージ110を受け取り次第新しいRRLPセッションを開始する。時間bにおいて図示されているように、通常、MS10は、RRLP支援データAckメッセージ112と呼ばれる受領確認応答によりRRLPセッションを完結する。
【0041】
時間cにおいて、ネットワーク70は、位置命令および選択的に支援データを含むRRLP測位要求メッセージ120を送る。ネットワーク70からの位置命令は、ネットワーク(NW)によって設定される最大応答時間(NW応答)および同じくネットワーク(NW)によって設定される最小正確度(NW正確度)を含む。RRLP測位要求メッセージ120の受信に応答して、既知の移動局は、自分のGPSエンジンを始動する。GPSは、衛星(SV)および/または擬似衛星を使用する測位システム一般を総称するために使用される。エンジンもまた、データを処理する動作をするハードウェアおよび/またはファームウェアおよび/またはソフトウェアとして一般的に使用される。MS10は、次に、1つまたは複数の位置確定を決定し、各々の位置確定は、推定される不確実度を有している。
【0042】
推定される不確実度が、ネットワーク70によってシグナリングされる最小のネットワーク正確度(NW正確度)以下になると、またはMS10による位置確定計算時間がネットワーク応答時間(NW応答)パラメーターによって許容される時間の限界に達すると、位置決め処理は停止する。時間dにおいて図示されているように、MS10は、RRLP測位応答メッセージ122において計算された位置確定を報告し、およびGPSエンジンをも停止する。時間基準cとdとの間の時間差は、実質的なものであってもよい(例えば、45秒から数分)。位置決定における1つの目標は、この獲得時間を最小限にすることである。もう1つの目標は、提供される位置確定の不確実度を低減することである。
【0043】
図3は、支援データの擬似セグメント化を図示している。支援データは、1つまたは複数の衛星(SV)に基づく位置データを含んでもよい。支援データは、8個から12個またはそれ以上の衛星に関する情報を典型的に含むので、擬似セグメント化支援データ・メッセージの複数のブロックに分けられる。各々のブロックは、1個、2個、3個、または4個の衛星に関する情報を含む。図示されている例において、支援データは、3つの擬似セグメントにセグメント化されている。最初の2つのブロックは、3個または4個の衛星に関する情報を含んでもよく、および最後のブロックは、例えば図示されている全部で7個から11個の衛星のうちの1個、2個、または3個の衛星に関する情報を含んでもよい。
【0044】
支援データの第1のブロックは、時間aにおいて、第1のRRLP支援データ・メッセージ140でネットワーク70からMS10へ通信される。いったん受信されると、第1のRRPLセッションが始まるが、MS10が時間bにおいてネットワーク70にRRLP支援データAckメッセージ142を送るとき、第1のRRPLセッションをすぐに終了する。
【0045】
支援データの第2のブロックは、時間cにおいて第2のRRLP支援データ・メッセージ144でネットワーク70からMS10へ通信される。いったん受信されると、第2のRRPLセッションが始まる。この例において、時間dにおいてMS10は、メッセージ144によって作られるRRLPセッションを終了させる第2のRRメッセージ(本件明細書において追加のRRメッセージ130と呼ばれる)を受信する前に受領確認メッセージを送信する時間がない。追加のRRメッセージは、いくつかの異なるRRメッセージのいずれかであってもよい。例えば、ハンドオーバー・メッセージのようなより優先度の高いRRメッセージがMS10に送信されていてもよい。
【0046】
MS10が、ダウンリンクRRLPメッセージの一部を受信するかまたはいかなるダウンリンクRRLPメッセージも受信しないかのいずれかである場合、セッションは、プリエンプト(preempt)されたと呼ばれる。送信のためにネットワークの出力キューにメッセージが置かれるとき、プリエンプション(preemption)が生じる。ある場合において、ダウンリンクRRLPメッセージが完全に送信されうる前に、まだ送信されていないメッセージの残りは、より優先度の高いメッセージのためにキューから消去される。これらの場合、MS10は、ダウンリンクRRLPメッセージの全体ではないが、そのいくつかを受信していてもよい。他の場合において、ダウンリンクRRLPメッセージは、メッセージの第1のビットが空間インターフェース上で送信される前に消去される。これらの場合、セッションもまた、プリエンプトされたと考えられる。しかしながら、MS10は、セッションの存在について知らない。ダウンリンクRRLPメッセージが長いとき、または同じダウンリンク・キュー内にそれの前により長いメッセージ(つまり、以前の送信時間のためにスケジュールされた他のメッセージ)があるとき、プリエンプションがしばしば生じる。
【0047】
その一方で、MS10がダウンリンクRRLPメッセージの全体を受信するが、まだRRLP支援データAckメッセージのような応答を完全に送信していない場合、セッションは、アボートされた(aborted)と呼ばれる。MS10がダウンリンクRRLPメッセージに応答するのに比較的長い時間かかるとき、たいていアボートが生じる。
【0048】
プリエンプションの場合とアボートの場合の両方において、MS10および/またはネットワーク70に存在するセッションは終了される。1つの目標は、MS10に、ダウンリンクRRLPメッセージにすぐに応答させることであり、それによって、打ち切られるセッションを最小限にする。もう1つの目標は、より短いダウンリンクRRLPメッセージをネットワークに送らせることであり、それによって、キューを満杯ではない状態に保ち、プリエンプトされるセッションを最小限にする。擬似セグメント化は、ダウンリンクRRLPメッセージをより短くし、そのことによって、プリエンプトされるセッションの機会を減らすという第2の目標をターゲットにしているが、RRLP測位要求メッセージに関連する処理に関して以下でさらに説明されるように、ダウンリンク・メッセージにすぐに応答するという第1の目標には対処していない。
【0049】
以下で、アボーション、アボート、またはアボートされた、という用語は、追加のRRメッセージの受信によるアボーション・セッション、またはより優先度の高いダウンリンク・メッセージによるダウンリンク・キューのプリエンプションのいずれかにより生じるセッションを終了することを指すのに使用される。
【0050】
アボートされたセッションからの回復のために、ネットワーク70は、リビッド・メッセージを送信する。リビッド・メッセージは、ダウンリンク・キューにあらかじめ置かれたメッセージの次の送信である。図示されている例において、時間eにおいて、支援データの第2のブロックは、MS10において第3のRRLPセッションを始めるリビッドRRLP支援データ・メッセージ148に含まれる。MS10は、時間fにおいて、他のRRLP支援データAckメッセージ150によりネットワーク70に対して受領確認を通知する。
【0051】
支援データの最後のブロックは、時間gにおいてRRLP測位要求メッセージ120の中でネットワーク70からMS10へ送信される。当該メッセージ120は、MS10によって受信され、この例における第4のセッションを開始する。MS10は、次に、位置決定を開始するよう命令される。この位置決定には、何十秒ないし数分かかるかもしれない。命令を受信してから応答を送信するまでの時間の間、セッションは、追加のRRメッセージによるセッションのアボーションを受けやすい。この例において、最終セッションは、アボートされず、むしろMS10は、時間hにおいてRRLP測位応答メッセージ122により応答する。
【0052】
図4および5は、MS10が追加のRRメッセージを受信することに基づいて位置決定を停止することを例示している。図4において、時間aにおいて、ネットワーク70は、MS10にRRLP支援データ・メッセージ110を送信し、その後、時間bにおいて、MS10は、RRLP支援データAckメッセージ112により返答する。ネットワーク70およびMS10は、このメッセージ交換を数回繰り返すことによって、GPSエンジンを始動させる前にMS10に対するほとんどすべての支援データを提供することができる。時間cにおいて、ネットワーク70は、MS10に支援データの最後のブロックでRRLP測位要求メッセージ120を送る。このポイントにおいて、MS10は、MS10のGPSエンジンを始動させ、位置決めを開始する。
【0053】
時間dにおいて、ネットワーク70は、MS10に追加のRRメッセージ130(すなわち、MS10が進行中のセッションにあるのでMS10が受信することを予期していなかったというメッセージ)を送る。MS10が返答メッセージを送信することができる状態になる前に生じたこの追加のRRメッセージ130は、RRLP測位応答メッセージ120によって始動された現在のセッションをMS10にアボートさせることになる。セッションを打ち切ることの一環として、MS10は、GPSエンジンをシャットダウンし、位置決めプロセスを終了し、追加のRRメッセージ130に応答し、およびネットワーク70からの次の要求を待つ。時間eにおける△tの短い遅れの後(なお、△t = e − d)、ネットワーク70は、RRLP測位要求メッセージ120Aのリビッドを送信する。RRLP測位要求メッセージ120Aのリビッドは、MS10のGPSエンジンの再始動と位置決めの再開をMS10にさせる。追加のRRメッセージ130による割込みに先立つメッセージ120Aのリビッドを送るこのプロセスは、提供されるネットワーク応答時間および正確度のパラメーターの範囲内でMS10がMS10の位置を決定することができる前に数回生じてもよい。時間fにおいて、MS10は、RRPL測位応答メッセージ122の中でネットワーク70に決定位置を報告する。
【0054】
図5は、このメッセージ交換を状態図の形式で示している。MS10がRRLP測位要求メッセージ120を受信するとき、MS10は、GPSエンジンを始動させ、位置決定を開始する状態200に入る。通常の割込みされないオペレーションでは、MSは、位置を決定し220、状態230に入ることでネットワークにその位置を報告する。MSは、RRPL測位応答メッセージ122を送る。提供されるネットワーク応答時間内に位置確定が決定されないとき(例えば、応答時間の時間切れが生じるとき)、MS10は、状態200を出て、状態230に入ることができる。状態230では、MS10は、ネットワークによって要求されるよりも悪い正確度を備える位置確定を含むRRPL測位応答メッセージ122により返答する。
【0055】
この状態図は、生じる可能性のある他の状況を示している。例えば、MS10が追加のRRメッセージ130を受信するとき、MS10は、状態200を出て、状態210に入る。状態210において、MS10は、GPSエンジンをシャットダウンし、位置決定を停止する。MS10がリビッドRRLP測位要求メッセージ120Aを受信するとき、MS10は、状態210を出て、状態200に再び入る。結局のところ、MS10は、通常、位置を決定するか、または時間切れとなるか(220)のいずれかであり、およびRRLP測位応答メッセージ122により応答するために状態230に入る。
【0056】
上で説明された位置決めプロセスでは、MS10のGPSエンジンを開始する前にRRLP測位要求メッセージ120まで待ち、MS10が追加のRRメッセージ130を受信するとき、そのGPSエンジンをシャットダウンすることによって、GPSエンジンが実行する継続時間を最小限にする。RRLP測位要求メッセージ120を受信することに応答してGPSエンジンを始動することによって、MS10は、ネットワーク70は位置確定が必要であると分かる。何らかの他の場合においては、ネットワーク70がMS10からの位置確定を要求するという保証はない。したがって、この時点よりも前に始動しないことによって、MS10は、バッテリー電力を節約する。MS10はまた、RRLPセッションがいったん終わる(例えば、アボーションの結果または位置確定の報告の結果として)とGPSエンジンをシャットダウンすることによってバッテリー電力を節約する。
【0057】
本件発明のいくつかの実施形態にしたがって、この既知の手順に従わず、代わりにRRLP測位要求メッセージ120を受信することを見越してGPSエンジンを始動することによる利点が認識されることができる。さらに、RRLPセッションがいったん終わるたびにGPSエンジンをシャットダウンしないことによる利点が認識されることができる。バッテリー電力の費用で、GPSエンジンは、早めに(つまり、RRLP測位要求メッセージ120が受信される前に)始動されることができおよびRRLPセッションが終了されても位置決定プロセスを継続することができる。
【0058】
図6および7は、本件発明の実施形態にしたがって、GPSエンジンを始動またはシャットダウンするイベントを示している。図6の状態図は、2つの状態を示している。1つは、GPSエンジンが動いていない状態800であり、もう1つは、GPSエンジンが始動し、位置決定プロセスが始まっている状態810である。RRLP測位要求メッセージ120の将来の受信を見越してGPSエンジンの早めの始動を起動するいくつかのトリガ・イベントがユーザー側およびネットワーク側で生じてもよい。トリガ・イベントは、実行時のオペレーションを開始した後に生じる。すなわち、トリガ・イベントは、移動局を単にオンにして、移動局を実行時のオペレーションにするというものではない。何らかのデバイスが常にGPSエンジンを実行しており、したがって、GPSエンジンを始動するトリガ・イベントが存在しない。トリガ・イベントは、移動局のGPS位置決め機能を明確にオンにするためのユーザー・オペレーションではない。トリガ・イベントは、GPSエンジンを典型的にオンにしないイベントである。さらに、トリガ・イベントは、GPSエンジンを典型的にオンにするメッセージであるRRLP測位要求メッセージの受信より前に生じる。
【0059】
最初に820において、救急サービス(ES)コールが起動されたというトリガ・イベントをMS10が検出したら、MS10は、状態800から状態810に移行することができる。位置確定が必要とされることを示す移動局アプリケーション(MS App)からのメッセージをMS10が受信したら、ユーザー側で開始されるもう1つの移行が生じることができる。ネットワーク側のイベントもまた、状態800から状態810への移行を起動することができる。例えば、840において、新しいRRLP支援データ・メッセージのトリガ・イベントをMS10が受信したら、MS10は、状態800から状態810に移行することができる。850において、MS10が付加価値サービス(VAS)メッセージのトリガ・イベントを受信したら、MS10は、状態800から状態810に移行することができる。完全性のために、860において、RRLP測位要求メッセージ120の受信によって既知の状態を移行するプロセスが図示されている。
【0060】
図6を参照して説明されたように早めに始動することに加えて、図7において図示されているように、GPSエンジンのシャットダウンが有利に延期されることができる。図7もまた、2つの状態を含んでいる。状態900では、GPSエンジンは、(例えば、上で説明されたイベントのうちの1つにより)実行中である。状態910では、GPSエンジンがシャットダウンされている。いくつかのイベントは、GPSエンジンをシャットダウンするために状態900から状態910への移行をトリガしてもよい。例えば、位置が導き出されてもよく、または時間切れが生じてもよい。920において、より良い位置確定を待つMS APPのように、エンジンが実行を続ける重要な必要性が他にないとき、RRPL測位応答メッセージ122を最近送ったことの結果として移行が生じる。移行はまた、位置確定がMS APPにたった今報告され、およびMS10がRRLP測位要求メッセージ120を見越しておらず、RRPL測位応答メッセージ122を送ることを予期していないときにも生じうる。
【0061】
異常な場合もまた移行が生じる原因となりうる。例えば940において、(例えば、上で説明されたイベント820または840により)MS10がRRLP測位要求メッセージ120を見越していたが、所定の時間(例えば、45、60または90秒、または30-60、30-90、30-120、30-180、30-240、60-90、60-120、60-180、60-240、90-120、90-180、90-240、120-180、120-240など、当業者によって理解されるであろう時間の範囲から選択される値)内にメッセージを受信しなかった場合、MS10は、GPSエンジンをシャットダウンすることができる。同様に940において、GPSエンジンがあまりにも長い時間(例えば、120または180秒)作動を続けていたら、MS10は、時間切れとし、GPSエンジンをシャットダウンし、そうすることによってバッテリー電力を節約することができる。
【0062】
図8は、本件発明の実施形態にしたがって、早めの位置決定を強調するメッセージ・フロー図を示している。1つの目標は、MS10がネットワーク70からの将来のRRLP測位要求メッセージ120をMS10が予期または見越すと同時にGPSエンジンを始動することである。時間aにおいて、MS10は、救急サービス・コールのためにダイヤルされた数字(例えば、米国では「911」、ヨーロッパでは「112」、または日本では「119」)を認識する。コールが救急サービス・コールであるといったん認識されると、MS10は、MS10の位置確定の必要性を予期してGSPのエンジンを始動させることによって位置決定を開始することができる。
【0063】
時間bにおいて、ネットワーク70は、MS10にRRLP支援データ・メッセージ110を送る。これを受けて、時間cにおいて、MS10は、RRLP支援データAckメッセージ112により返答する。メッセージ110および112を送るこのプロセスは、ネットワーク70が十分な支援データを送信してしまうまで繰り返されてもよい。最後に、時間dにおいて、ネットワーク70は、MS10にRRLP測位要求メッセージを送る。MS10は、自分の位置を決定することを継続する。次に、時間eにおいて、MS10は、自分の決定された位置を含むRRLP測位応答メッセージ122によりネットワーク70に返答する。
【0064】
図9および10は、本件発明の実施形態にしたがって、追加のRRメッセージ130が受信された後に位置決定を継続する方法を例示している。もう1つの目標は、マイナーな異常なイベントによってGPSエンジンの作動を継続することである。図9において、追加のRRメッセージ130は、現在の測定セッションをアボートするが、MS10は、位置決めプロセスを継続し、MS10のGPSエンジンを中断しない。時間aにおいて、MS10は、ネットワーク70からRRLP支援データ・メッセージ110を受信する。これを受けて、時間bにおいて、MS10は、RRLP支援データAckメッセージ112により返答する。改めて、メッセージ110および112を送るこのプロセスは、ネットワーク70が十分な支援データを送信してしまうまで繰り返されてもよい。
【0065】
時間cにおいて、ネットワーク70は、MS10にRRLP測位要求メッセージ120を送る。この時点で、GPSエンジンは、MS10が救急コールを認識するか、または他のトリガ・イベントを認識するかのいずれかに基づいて既に実行中である。時間dにおいて、ネットワーク70が返答を受信する前に、ネットワーク70は、時間cにおいて開始されたRRLPセッションを中断する。既知の移動局は、RRLPセッションを終了し、また、GPSエンジンもシャットダウンする。ここで、MS10は、GPSエンジンが位置決めプロセスを継続することを可能にするためにGPSエンジンを中断されない状態のままにしておく。
【0066】
最後に、時間eにおいて、ネットワーク70は、リビッド・プロセスにおいてMS10へRRLP測位要求メッセージ120Aを再送する。改めて、MS10は、GPSエンジンを再始動せず、位置決めプロセスを継続する。上で述べたように、アボートおよびリビッドのプロセスは、繰り返してもよい。次に、時間fにおいて、MS10は、自分の決定された位置を含むRRLP測位要求メッセージ122によりネットワーク70に返答する。
【0067】
図10は、状態図を示している。トリガ・イベントが生じるとき、MS10は、状態300に入る。トリガ・イベントは、RRLP測位要求メッセージ120を受信すること、RRLP支援データ・メッセージ110を受信すること、救急サービス・コールの開始を認識することなどを含む。状態300において、MS10は、既に動作中である場合は、位置決定を継続し、またはまだ始動していない場合は、GPSエンジンを始動することによって位置決定を開始する。
【0068】
通常、位置が決定されるとき、または時間切れが生じるとき(移行310として図示されている)のいずれかのとき、MS10は、状態300を出て、状態320に入る。例えば、ネットワーク70が所定の少ない時間内での測定を予期しているとMS10が決定するとき、時間切れが生じうる。ある場合では、MS10が応答を送ることができる前に現在のRRLPセッションをアボートする追加のRRメッセージ130をMS10が受信するとき、MS10は、状態300を出て、状態330に入る。
【0069】
状態330において、MS10は、現在のRRLPセッションをアボートするが、位置決定を継続する。リビットRRLP測位要求メッセージ120Aを受信すると、MS10は、状態340に入るが、再び位置決定プロセスを継続する。MS10が位置をいったん決定するか、または時間切れがいったん生じると(移行340として図示されている)、MS10は、状態340を出て、状態320に入る。状態320において、MS10は、ネットワーク70にそのRRLP測位要求メッセージ320を送る。
【0070】
図11および12は、本件発明の実施形態にしたがって、ダウンロードされた支援データを最適に配列する方法を例示している。支援データは、1つまたは複数の(擬似セグメント化された)RRLP支援データ・メッセージ110でおよび/またはRRLP測位要求メッセージ120の中で送信されることができる。ネットワーク70からMS10への支援データの通信を最適に配列することは、RRLP測位要求メッセージ120により命令される前に、MS10が位置決定プロセスを早めに有利に開始し、および支援データのセグメントを積極的に使用することを可能にする。
【0071】
図11は、セグメント化された支援データ400の最適な配列を示している。第1のセグメントは、衛星時間および粗いMS位置420を含む基準情報410を含む。第1のおよび残りのセグメントは、衛星の位置情報(アルマナックおよび天体位置表のデータを含む)430を含む。衛星の位置情報430は、最適な衛星440から次の最適な衛星450まで配列され、および最も最適でない衛星460まで続いている。必ずしもすべての利用可能な衛星がこの最適に配列された支援データのリストの中に置かれる必要はない。
【0072】
衛星の最適な配列は、最も見られることができそうでかつMS10の位置を速く決定するのに役に立ちそうな1セットの衛星をMS10に提供するために、1つまたは複数の機能を考慮に入れてもよい。例えば、粗いMSの位置についての知識は、同様の粗いMSの位置を備えている移動局にとって見えるよう経験的に示されている衛星位置を探すために使用されることができる。ネットワーク70は、同様のまたは同じ粗いMSの位置を有する移動局にとって利用可能となるよう観測または実験によって示されている宇宙のある領域内にあるべき衛星を探すことができる。
【0073】
さらに、粗いMSについての知識は、環境の一般的な特徴を決定するために使用されることもできる。この環境上の特徴は、MS10が自分の位置を決定することができるように、最良の衛星を識別するために使用されることができる。粗いMS位置は、例えば、田舎の景観(例えば、水平な田舎の環境)、山地の景観(例えば、南北方向の谷においてまたは山の西側の斜面に沿って)、または都会の景観(例えば、高層ビルが密集した中心街)に位置しているようなMS10を識別することができる。粗いMS位置が、上空の妨げのない視界をMS10が最も有していそうであると示す場合、ネットワーク70は、衛星の直交のセットまたは衛星の擬似直交のセットについての衛星位置情報(例えば、互いに120度離れている水平線から45度に一番近い3個の衛星)を最初に提供してもよい。これらの3個の衛星のうちのいずれか2個は、移動局に対してほぼ直交に向けられているだろう。すなわち、第1の衛星と移動局との間の第1の線、および第2の衛星と移動局との間の第2の線は、直角(直交)または60度と120度の間の角度(ほぼ直交方向)を形成している。特定の宇宙の領域に位置している衛星をMS10が見ることができないだろうと粗いMS位置が示唆する場合(例えば、山が東側の上空を覆う場合)、それらの衛星についての位置情報は、最適な衛星リストの下のほうにあるかもしれない(またはリストから完全に削除されうる)。
【0074】
基準情報410に加えて、支援データの第1のセグメントはまた、許容できるメッセージの長さによって提供されるような1つまたは2つの衛星についての情報を含んでもよい。第1のセグメントは、MS10に最適な440である衛星位置情報を含んでいる。支援データの第2のセグメントは、次の2個、3個、または4個の最適な衛星450についての衛星位置情報を含んでいる。支援データの各々の後続のセグメントは、最も適切でない衛星460の衛星のセットに到達するまで、等しいかまたは段々に最適でない衛星についての衛星位置情報を含んでいる。
【0075】
図12は、支援データのセグメントを配列、および送信するためのフローチャートを示している。ステップ500において、ネットワーク70は、MS10にとって最適から最も適切でないものまでの順に衛星リストを配列することによって配列リストを提供する。両方のリストは、ネットワーク70内のメモリーに記憶されてもよい。配列は、各々のMS10に特有であってもよい。例えば、配列は、粗いMS位置に依拠してもよい。ステップ510において、ネットワーク70は、基準情報(つまり、基準の時間および粗いMS位置)および最適な衛星についての衛星位置情報を含む第1のセグメント化されたRRLP支援データ・メッセージ110を送る。
【0076】
ステップ520において、ネットワーク70は、例えば、ネットワーク70内のコントローラーまたはコントローラー論理を使用して、RRLP測位要求メッセージ120を送る時間であるかどうかを決定する。ネットワーク70は、十分な支援データがMS10に既に送られていたら、RRLP測位要求メッセージ120を送る時間であると決定してもよい。少なくとも所定の数の衛星(例えば、4-14個の衛星)についての衛星位置情報をMS10が有している場合、ネットワーク70は、MS10が十分な量の支援データを有していると決定してもよい。代替的に、所定の数の衛星には到達していないが、支援データ・メッセージの中で送るためにもはや衛星情報が利用可能でなくなったら、ネットワークは、RRLP測位要求メッセージ(支援データの最終部分を備えるまたは備えない)を送信することができるか、または時間丁度にRRLP測位応答メッセージを受信するようRRLP測位要求メッセージが送られるようタイマーをセットすることができるかのいずれかである。代替的に、位置確定がネットワーク70によって必要とされるまでの残り時間が所定の時間よりも短い場合、ネットワーク70は、MS10が十分な量の支援データを有していると決定してもよい。この場合、時間切れが生じたら、ネットワーク70は、RRLP測位要求メッセージ120を送る時間であると決定する。代替的に、すべての支援データが以前に送られてしまっていたら、ネットワーク70は、RRLP測位要求メッセージ120を送る時間であると決定してもよい。
【0077】
RRLP測位要求メッセージ120を送る時間ではない場合、ネットワーク70は、ステップ530に移ることができる。RRLP測位要求メッセージ120を送る時間である場合、ネットワーク70は、ステップ540に移ることができる。ステップ530において、ネットワーク70は、次の最適な衛星のグループについての位置情報を含む次のセグメント化されたRRLP支援データ・メッセージ110を送り、その後、ステップ520に戻る。ステップ520と530との間のこのループは、複数回継続してもよい。ステップ540において、ネットワーク70は、RRLP測位要求メッセージ120を送る。RRLP測位要求メッセージ120は、支援データの最終セグメントを含んでもよい。代替的に、RRLP測位要求メッセージ120は、以下で詳細に説明されるように何らかの支援データが欠落していてもよい。
【0078】
図13および14は、本件発明の実施形態にしたがって、ジャスト・イン・タイムの位置要求を送る方法を示している。
【0079】
図13では、時間aにおいて、ネットワーク70が、RRLP測位要求メッセージ120のようなRRLPメッセージを送ることによってRRLPセッションを開始する。このシナリオは、ネットワーク70がMS10に1つまたは複数のRRLP支援データ・メッセージ110を成功的に送った、またはMS10がそのメモリー内に支援データを既に有していると仮定している。図示されている例において、ネットワーク70は、およそ35秒でのMS10からの位置確定を要求する。時間bにおいて、RRLPセッションは、他の何らかのRRメッセージ131によりアボートされる。
【0080】
ある場合において、時間aにおいて図示されているRRLPメッセージ120は、ネットワーク70の出力キュー内にまだ在るかもしれないので、MS10は、RRLPメッセージを受信しておらず、またRRLPセッションを開始していない。この場合、他のRRメッセージ131は、RRLPメッセージ120がキューから成功的におよび完全に送信されうる前にキューからそれを取り除くことによってRRLPメッセージ120をプリエンプトする。第1のRRLP支援データ・メッセージ(図示されていない)のようなトリガ・イベントをMS10が以前に受信しているために、GPSエンジンが既に動作中である。各々の後続のメッセージの間、GPSエンジンは、位置決定プロセスを中断されることなく継続する。
【0081】
ネットワーク70は、時間cにおいて、位置確定が必要とされるまでに最短時間のみしか残っていない(例えば、残りおよそ4秒)と決定する。ネットワーク70は、RRLP測位要求メッセージ120BをMS10に送る。このメッセージ120Bは、応答が(時間dにおいて)ジャスト・イン・タイムに受信されるようにある時間(時間c)において送られる。いくつかの実施形態において、RRLP測位要求メッセージ120Bは、NW応答時間およびNW正確度パラメーターを備えて送られるが、支援データは備えられずに送られる。RRLP測位要求メッセージ120は、短い時間切れ(例えば、NW応答時間が2または4秒を表わしている)を含んでいるかもしれない。この短い時間の間にMS10は、位置確定を返さなくてはならず、不確実度についての低い値を含んでいる可能性がある(NW正確度は、高い正確度、例えば、およそ10メートルを示す)。代替的に、RRLP測位要求メッセージ120は、大きな位置不確実度を許すための位置正確度パラメーター・セットを含んでいてもよい(NW正確度は、低い正確度、例えば、およそ250メートルを示す)。時間dにおいて、残り時間がおよそ0秒または0秒に近いとき、ネットワーク70は、ジャスト・イン・タイムにMS10からRRLP測位要求メッセージ122を受信する。
【0082】
比較的早く中断されたRRLPセッションのためにリビッドが必要だったので、このジャスト・イン・タイム手順が呼び出される可能性がある。ある場合において、中断されたRRLPセッションは、前のRRLP測位要求メッセージ120によって始動されるセッションであるはずである(図示されているように)。ある場合において、中断されたRRLPセッションは、RRLP支援データ・メッセージ110によって始動されるセッションであるはずである。ある場合において、中断されたRRLPセッションは、前のRRLP測位要求メッセージ120またはRRLP支援データ・メッセージ110のいずれかによって始動されるセッションであってもよい。
【0083】
図14は、ネットワーク70における、ジャスト・イン・タイムの位置要求および応答のためのプロセスを示している。ステップ600において、ネットワーク70は、RRLP測位要求メッセージ122が必要とされる将来の時間を決定する。ステップ610において、ネットワーク70は、タイマー、スケジュールなどをセットし、位置データが必要とされる直前(例えば、4秒前)まで待機する。最後のRRLPメッセージの後、かつ、ジャスト・イン・タイムRRLP測位要求メッセージ120の前のこの待機時間の間、ネットワークは、他のRRメッセージを送ってもよく、および移動局の位置決定プロセスを中断しなくてもよい。
【0084】
ステップ620において、ネットワーク70は、RRLP測位要求メッセージ120を送る。このメッセージ120は、支援データ無しで一度に送られ、応答するのに十分な時間をMS10に与える。ステップ630において、ネットワーク70は、位置が必要とされる直前にRRLP測位応答メッセージ122を受信する。
【0085】
上で述べられたように、このジャスト・イン・タイム・プロセスは、ネットワーク70によって送信されるすべてのRRLP測位要求メッセージ120について実装されてもよい。位置確定が必要とされる(例えば、リビッドを予期している場合)直前までRRLP測位要求メッセージ120を送るために待機することは、アボートされるセッションの発生を低減し、チャネル帯域幅を節約する。代替的に、1つまたは複数のアボーションおよび/またはプリエンプションがこのMS10との現在の通信内で生じた場合、このプロセスが実装されてもよい。代替的に、1つまたは複数のアボーションまたはプリエンプションが、例えば、同様の粗いMS位置を有する移動局についてのこのセル内の他の移動局との通信で生じた場合、このプロセスが実装されてもよい。
【0086】
図15および16は、本件発明の実施形態にしたがって、アボートされるセッションを回避するために新しいRRメッセージを遅らせる(または落とす)方法を示している。
【0087】
図15は、ワイヤレス・ネットワークにおけるネットワーク70とMS10との間のリビッドを最小限にする方法を示している。時間aにおいて、ネットワーク10は、RRLP要求メッセージ100を送り、そうすることによって、セッションを作動する。RRLP要求メッセージ100は、RRLP支援データ・メッセージ110またはRRLP測位要求メッセージ120のいずれかであってもよい。時間bにおいて、ネットワーク10がMS10からの応答を受信する前に、ネットワーク70は、RRLPセッションがまだ開いている間に、新しいRRメッセージがネットワーク70からMS10に送られる準備ができていると決定する。既知のシステムにおいて、ネットワーク70は、この新しいRRメッセージを直ちに送信することによって、現在のRRLPセッションをアボートする。本件発明の実施形態にしたがって、ネットワーク70は、現在のRRLPセッションがアボートされることを回避するために新しいRRメッセージを送るために、可能ならば、待機する。すなわち、RRLPセッションをアボートすることを回避するために、ネットワーク70は、RRLP応答/受領確認メッセージ102が受信され、そのことによってRRLPセッションが正常に閉じる後まで、新しいRRメッセージを待機する。特定の新しいRRメッセージに基づいて、ネットワーク70は、新しいRRメッセージを送るのを待つか、または新しいRRメッセージを全部落とすかのいずれかであってもよい。時間cにおいて、ネットワーク70は、RRLP応答/受領確認メッセージ102を受信および認識する。その後少しして、時間dにおいて、新しいRRメッセージが落とされなかった場合、ネットワーク70は、RRLPセッションが閉じられた後に新しいRRメッセージを送り、そのことによって、RRLPセッションのアボートを回避する。
【0088】
図16において、ステップ650において、ネットワーク70は、RRLP要求メッセージを送る。ステップ660において、RRLPセッションが閉じられる前に、ネットワーク70は、新しいRRメッセージがMS10に送られる準備ができていると決定する。ステップ670において、ネットワーク70は、新しいRRメッセージの送信を遅らせる(または落とす)ことができるかどうかを決定する。それが許容されない場合、ネットワーク70は、ステップ690において新しいRRメッセージを送り、そのことにより、現在のRRLPセッションをやむを得ずアボートする。ステップ680において、ネットワーク70は、RRLP応答/受領確認メッセージ102を待ち、その後RRLP応答/受領確認メッセージ102を受信する。新しいRRメッセージが遅れた場合、処理を完結する前に、処理はステップ690まで続いていく。新しいRRメッセージが落とされた場合、送られるべき新しいRRメッセージは残っておらず、処理は完結する。
【0089】
図17、18、19、20および21は、本件開示の実施形態にしたがって、救急サービス(ES)コールにおける応答時間と正確度とのバランスを図るために正確度パラメーターを変化させる方法を例示している。
【0090】
図17は、時間が利用可能なとき、強化された正確度を使用するための救急サービス(ES)コールのためのコール・フロー処理の一例を示している。時間a (t = 0)において、MS10は、ESコールを識別する。ESコールを識別することに応答して、MS10は、GPSエンジンを始動する。MS10は、活動タイマーを大きな値(例えば、Act_timer = 40秒)にセットしてもよい。活動時間についての1つの目標は、ネットワーク70とMS10との間のメッセージの活動(または不活発性)を監視することである。ある時間の間活動が無い場合、活動タイマーは、時間切れになり、GPSエンジンはシャットダウンされる。
【0091】
時間bにおいて、ネットワーク70は、第1のRRLP支援データ・メッセージ140を送る。この第1のメッセージ140は、基準情報410(図11からの衛星時間および粗いMS位置420)を含む。第1のメッセージ140はまた、MS10に最適な衛星についての衛星位置情報を含む。時間cにおいて、MS10は、RRLP支援データAckメッセージ142により返答する。時間dおよび時間eにおいて、MS10にとって次に最適な衛星についての第2の追加の支援データ(衛星位置情報)を送るために、支援データ・メッセージ144および受領確認メッセージ146を通信するプロセスは、一回または複数回繰り返してもよい。
【0092】
次に、ネットワーク70は、RRLP測位要求メッセージ120を準備する。RRLP測位要求メッセージ120は、ネットワーク応答時間(NW応答時間)パラメーターの値を含んでいてもよい。このNW応答時間パラメーターは、中間応答時間(例えば、値4は16秒に対応する)を示すようセットされてもよい。メッセージ120はまた、ネットワーク正確度(NW正確度)パラメーターを含んでもよい。このNW正確度パラメーターは、中間の正確度または不確実度(例えば、値19は51.2メートルに対応する)を示すようセットされてもよい。このパラメーターおよび他の距離または不確実度パラメーターまたは範囲であって、本件明細書において特定の値で説明されるものは、単に例示として提供されるものである。他の値が使用されてもよい。51.2メートルまたは245.5メートルの値は、例えば、40から60メートル、30から70メートル、40から100メートル、40から400メートル、100から150メートル、100から250メートル、100から300メートル、100から400メートルなどの当業者が理解するような範囲の値であってもよい。
【0093】
時間fにおいて、ネットワーク70は、RRLP測位要求メッセージ120を送る。ある場合において、支援データの最後のセットは、このメッセージ120に含まれる。他の場合において、支援データの最後のセットは、RRLP支援データ・メッセージ144であった、前のメッセージに含まれる。
【0094】
正確度を強化するために、MS10は、不確実度を全く表わさない、またはほとんど表わさない正確度値を使用してもよい。例えば、Act_Accuracyパラメーターは、値0にセットされてもよい。これは、0メートルの不確実度(最高の正確度値)を表わす。代替的に、Act_Accuracyパラメーターは、1.0、2.1、3.3または4.6メートルの不確実度を表わすために、値1、2、3または4にそれぞれセットされてもよい。不確実度を全くまたはほとんど表わさない他の値が使用されてもよい。
【0095】
ある場合において、MS10がこの強化された正確度プロセスを駆動する場合、MS10は、ネットワーク70によって送られるNW正確度パラメーターとは別個にAct_Accuracyパラメーターを有利にセットする。他の場合において、ネットワーク70が強化された正確度プロセスを駆動する場合、ネットワーク70は、標準ネットワーク正確度(例えば、51.2m)を有利におよび一時的にオーバーライドし、および後でRRLP測位要求メッセージ120の中で送るパラメーターを、不確実度を全くまたはほとんど表わさない正確度値にセットする。
【0096】
図示されているように、時間fの後、MS10は、例えば、現在の活動時間上の残り時間がネットワークが提供する応答時間よりも少ない場合、現在のカウントダウン時間(たとえば、20秒)から、ネットワーク応答時間(Act_timer = NW応答時間)と一致する値に活動タイマーをリセットする。このようにして、MS10は、測位確定が決定されてネットワーク70に通信されないうちに早まってGPSエンジンをシャットダウンするようなことはしない。MS10は、同様に、第2のカウントダウン・タイマーを応答時間にセットする(Act_timer = NW応答時間)。このタイマーは、MS10が決定された位置を送るときにセットするためにMS10によって使用されてもよい。
【0097】
時間gにおいて、例示における経過時間は、36秒である。MS10は、位置確定を決定する際にすべての割り当てられたネットワーク応答を使用する。したがって、位置正確度が達成されていなくても、強化された正確な位置は、標準ネットワーク正確度(例えば、51.2m)により要求されるよりも高い正確度(または同様に、より少ない不確実度)を潜在的に有しているとわかる。
【0098】
この不確実度パラメーターを0まで下げることによって、MS10は、位置確定を計算する際にすべての許容可能なネットワーク応答時間を使用する。不確実度パラメーターを低い値(例えば、1、2、3、または4)に下げることによって、MS10は、位置確定が低く推定された不確実度で決定されうる限り、許容可能なネットワーク応答時間全体を使用する可能性が最も高い。より低い必要性の不確実度で位置確定を得るよう試みる際にGPSエンジンによって使用される追加時間は、強化された正確位置確定を生成する機会をMS10に与える。
【0099】
時間gにおいて、MS10は、次のようなコンポーネントのうちの1つによりRRLP測位要求メッセージ122を送る:これらは、LocationInfo; GSP-MeasureInfo;または LoctionErrorである。典型的に、MS10が許容可能な位置確定または時間切れを決定するとき、MS10は、LocationInfoコンポーネントで応答する。代替的に、MS10がネットワーク70に測定を提供するよう命令されるとき、MS10は、GSP-MeasureInfoコンポーネントにより答えるだろう。この命令は、ネットワーク70がこの未処理データに基づいて位置を決定することを可能にする。
【0100】
図18は、救急サービス(ES)コールのためのコール・フロー処理の他の実施形態を示している。このシナリオにおいて、位置要求メッセージは、MS10が時間どおりの位置応答で返信をすることができるようにジャスト・イン・タイムに通信される。フローは、図17を参照して上で説明されたように開始する。時間a (t = 0)において、MS10は、ESコールを識別し、その後、応答して、GPSエンジンを始動させる。再び、活動カウントダウン・タイマーがセットされる(Act_timer = 40秒)。時間bにおいて、ネットワーク70は、第1のRRLP支援データ・メッセージ140を送る。時間cにおいて、MS10は、RRLP支援データ・メッセージ142により返信する。プロセスは、複数のセットの140/142メッセージの通信に続いてもよい。
【0101】
時間dにおいて、このシナリオは、以前に説明した状況から出発する。時間dにおいて、ネットワーク70は、位置要求メッセージを送るために必要とする情報を有している(RRLP測位要求メッセージ120)が、ネットワーク70は、ネットワーク70が位置確定を必要とするまでの所定の時間までメッセージを送るために待機する。標準ネットワーク正確度は、十分な正確度を提供するようセットされてもよい(51.2メートルに相当するNW正確度 = 19)が、ネットワーク・セット応答時間は、徹底的に短くされる。例えば、NW応答時間は、MS10に数十秒与えるよりも、むしろ2(4秒を表わす)または1(2秒を表わす)にセットされてもよい。この徹底的に短くされた時間は、移動局が位置確定を決定することが通常できない。通常、移動局は、数十秒から数分を必要とする。ここで、MS10が位置決定プロセスを早めに(例えば、時間aにおいて)開始するので、数十秒の間既にその位置決定に取り組んでしまっている。
【0102】
再び、ネットワーク70は、RRLP測位要求メッセージ120を準備する。メッセージ120は、徹底的に短くされたネットワーク応答時間(例えば、NW応答時間 = 4秒)およびネットワーク正確度(例えば、NW正確度 = 51.2メートル)を含む。時間eにおいて、例示における経過時間は、32秒であり、ネットワーク70は、RRLP測位要求メッセージ120を送る。この場合、支援データの最後のセットは、前のメッセージに含まれる(つまり、最後のRRLP支援データ・メッセージ140)。したがって、このメッセージ120は、支援データ無しで送られる。
【0103】
ある場合において、MS10によって使用される正確度は、低い正確度または言い換えると高い不確実度を表わす値にセットされる(例えば、値34は245.5メートルを表わす)。これは、所定の値または所定の設定可能な値であってもよい。低い正確度を表わすこの正確度値は、ネットワーク70による方法、またはMS10による方法のうちの1つの方法によってセットされてもよい。
【0104】
正確度値がネットワーク70によってセットされる場合、ネットワーク70は、この低い正確度値(NW正確度)を表わすようセットされたネットワーク正確度でRRLP測位要求メッセージ120を送る。例えば、ネットワーク70は、このMS10についての低い正確度値で標準ネットワーク正確度を一時的に上書きしてもよい。
【0105】
他方で、正確度がMS10によりセットされる場合、ネットワーク70は、標準ネットワーク正確度を表わすようセットされたネットワーク正確度でRRLP測位要求メッセージ120を送ってもよい。MS10は、受信したネットワーク正確度を上書きまたは無視し、その代わりに低い正確度を表わす値を使用する。MS10は、内部のカウントダウン・タイマーおよび応答時間タイマー(つまり、それぞれ、Act_timer = NW応答時間およびAct_RT = NW応答時間)の両方のためにネットワーク応答時間(NW応答時間)を使用する。時間fにおいて、応答時間タイマーがいったんゼロになると(例示における経過時間は、36秒である)、MS10は、RRLP測位応答メッセージ122を準備し、送る。
【0106】
このシナリオは、いくつかの利点を有する。バッテリー電力の損失を最小限にする一方で、MS10は、GPSエンジンを早めに(時間aにおいて)始動させ、および位置確定を決定する際に最大可能時間を使用し、強化された位置確定を提供する。RRLP測位要求メッセージ120は短い(なぜなら支援データを含まないから)ので、メッセージ120がプリエンプトされる可能性は低下する。ネットワーク応答時間が低い(例えば、4秒)ので、他のRRメッセージで最後のRRLPセッションがアボートされる機会は低下する。低下した正確な値(例えば、Act_Accuracy = 245.5メートル)が標準ネットワーク正確度(例えば、NW正確性 = 51.2メートル)の代わりになる場合、他のRRメッセージで最後のRRLPセッションがアボートされる機会は、さらに低下する。
【0107】
図19は、救急サービス(ES)コールのためのコール・フロー処理の他の実施形態をさらに示している。このシナリオにおいて、(支援データを備えているまたは備えていない)第1の位置要求メッセージ120は、最後のRRLP支援データ・メッセージ142の直後に通信される。このRRLPセッションが中断される場合、ネットワーク70は、位置が必要とされるときに基づいて、所定の時間までリビッド位置要求メッセージ120A(支援データを備えていないメッセージ)の送信を遅らせる。その他の場合は、時間aから時間fまでのイベントおよびメッセージ・フローは、図17を参照して上で説明されたものと同一であり、説明は繰り返されない。
【0108】
このシーケンスが図17と異なるのは時間gにおいてであり、ここにおいて、追加のRRメッセージ130は、現在のRRLPセッションをアボートさせる。言い換えると、RRLP測位要求メッセージ120は、(例えば、RRLP測位要求メッセージ120は、支援データを含むので長いから)ネットワークの出力キューにおいて内部的にプリエンプトされていた可能性がある。いずれの場合も、MS10は、現在開いているRRLPセッションを有しておらず、また位置を備えて返信せよとの命令も有していない。
【0109】
ネットワーク70は、位置確定を備えて返答するためにちょうど十分な時間をMS10に与えるために計算された時間まで、リビッド・メッセージ120Aを送ることを遅らせるので、位置確定は、ネットワーク70がこれを報告することができるようにジャスト・イン・タイムに受信される。アボートされているまたはプリエンプトされている先のRRLPセッションに基づいて、ネットワーク70は、第1のモードから第2のモードへ切り替わることを決定してもよい。第1のモードにおいて、ネットワーク70は、早まって一時停止されたRRLPセッションに基づいてリビッドを送り、およびわかったら直ちにリビッド位置要求メッセージを送る。すなわち、ネットワーク70は、次の位置要求メッセージのタイミングを、過去のイベント、すなわち、追加のRRメッセージの完了および可及的速やかな位置要求メッセージを再送信するニーズに基づかせている。
【0110】
この第2のモードにおいて、ネットワーク70は、リビッド位置要求メッセージをすぐには送らない。その代わり、ネットワーク70は、位置応答が必要とされるときに基づく時間の間有利に待機する。すなわち、リビッド位置要求メッセージのタイミングを過去のイベントに基づかせるのではなく、その送信は、将来のイベントに基づいている。例えば、次の位置要求のタイミングは、位置確定が必要とされるときに基づいている(例えば、残りのNW応答時間に基づいている)。
【0111】
RRLP測位要求メッセージ120が送信されるときのタイミングは、ネットワーク70において位置確定が必要とされる時間の前の所定の時間に基づいていてもよい。図示されている例において、所定の時間は、ネットワーク70によって位置情報が必要とされる前の8秒(NW応答時間 = 3)にセットされている。他の所定の時間が使用されてもよい。例えば、様々な移動局の経験的なデータに基づいて他の所定の時間が使用されてもよい(例えば、NW応答時間は、1、2、4、8、または16秒にセットされてもよい)。ネットワーク70は、メッセージがこの将来の時間に送信されるように、タイマーをセット、または測定要求メッセージをスケジュールしてもよい。
【0112】
時間h(t = 32)において、ネットワーク70は、遅れを終了し、リビッドRRPL測位要求メッセージ120Aを送る。示唆されているように、メッセージは、支援データを含んでいない。代替的に、リビッドRRPL測位要求メッセージ120Aを送る際の遅れが少し短くされ、応答時間(NW応答時間)が少し増され、およびメッセージ120Aが若干の支援データを含むことができるかもしれない。さらに、MS10によって使用される正確度パラメーターは、MS10が標準ネットワークの値を上書きすることによるか、またはネットワーク70によって一時的に不確実度の値とするかのいずれかによって大きな不確実度の値(例えば、245.5メートル)にセットされてもよい。MS10は、その活動タイマーをネットワーク提供の応答時間(Act_timer = NW応答時間)にリセットする。
【0113】
この例において、移動加入者の活動タイマーは、4秒(Act_timer = 4秒)で終了するようセットされていたが、このタイマーは、受信された時間に基づいてリセットされる(Act_timer = NW応答時間 = 8秒に変更する)。MS10は、この応答時間をネットワーク提供の応答時間(Act_RT = NW応答時間 = 8秒)にセットしてもよい。時間i(t = 36)において、MS10は、RRLP測位要求メッセージ122により、決定された位置を報告し、その後、GPSエンジンをシャットダウンする。
【0114】
図20は、ネットワーク70がジャスト・イン・タイムの測定要求メッセージを送信するが、支援データ・メッセージの先のリビッドは、ネットワーク提供の正確度をMS10に使用させるというシナリオを示している。時間aからdにおけるイベントおよびメッセージは、図19のものと同一である。時間eにおいて、セッションは、追加のRRメッセージ144によりアボートされる。同様に、ネットワークは、メッセージ144の移行をプリエンプトすることができる。時間fおよびgにおいて、支援データは、リビッドRRLP支援データ・メッセージ144Aとして送られ、およびRRLP支援データAckメッセージ146により受領確認される。リビッド・メッセージは、第1の支援データ・メッセージ(図示されていない)のリビッド、第2の支援データ・メッセージ(図示されているように)、または任意の他のセグメント化された一連の支援データ・メッセージ(図示されていない)であってもよい。
【0115】
時間h(t = 20)において、ネットワーク70は、上で説明されたように測定報告メッセージのジャスト・イン・タイムの受信のためにRRLP測位要求メッセージ120を送る。MS10は、その活動タイマーをネットワーク提供の応答時間(Act_timer = NW応答時間 = 16秒)にセットしてもよく、その応答時間をネットワーク提供の応答時間(Act_RT = NW応答時間 = 16秒)にセットしてもよく、およびその正確度をネットワーク提供の正確度(Act_Accuracy = NW正確度 = 51.2メートル)にセットしてもよい。
【0116】
前の例において、MS10は、一時的な値である正確度値を通常使用する。この一時的な値は、標準ネットワーク正確度よりも大きいかまたは小さいかのいずれかである異なる値である。この例において、標準ネットワーク正確度は、異なる値を使用することの例外として使用される。最後に、時間i(t = 36)において、MS10は、RRLP測位要求メッセージ122の中で、決定された測定を報告する。
【0117】
ある場合において、ネットワーク70は、リビッドの発生を(アボーションまたはプリエンプションにより)検出してもよい。この場合、ネットワーク70は、ネットワーク提供の正確度を一時的な値から標準ネットワーク正確度へ修正する。代替的に、MS10は、リビッド支援データ・メッセージの発生を(アボーションにより)検出してもよく、およびこのイベントに基づいて、MSは、その値からその正確度を修正する。代替的に、MSは、以前のRRLPメッセージからの測定された時間に基づいて、受信した測位要求メッセージが遅れていると決定してもよい。
【0118】
図21は、前の4つの図を参照して説明されたような標準ネットワーク正確度から正確度パラメーターを修正することに関係するフローチャートを示している。700において、MS10がRRLP測位要求メッセージ120を受信した後、メッセージ120が時間どおりに送られて受信されたかどうかの決定がなされる。この決定は、上で説明されたように、時間に基づいて(例えば、ある予測通信時間)、アボーションに基づいて、またはプリエンプションに基づいて、MS10によってまたはネットワーク70によってなされてもよい。RRLP測位要求メッセージ120が時間どおりである場合、処理は、ステップ710において継続する。
【0119】
ステップ710において、MS10は、最大性確度のために通常の正確度よりも高い正確度(例えば、0メートル)を使用するか、またはより正確な応答のために標準ネットワーク正確度よりも少ない選択された小さい値(例えば、1メートルと0メートルの間の値、または0メートルと標準ネットワーク正確度の値との間の値)を使用する。
【0120】
RRLP測位要求メッセージ120が遅れる場合、正確度が標準ネットワーク正確度にセットされてもよい(図示されていない)。代替的に、RRLP測位要求メッセージ120が遅れる場合、ステップ720において処理が継続される。メッセージ120がわずかに遅れているかまたは非常に遅れているかどうかを決定するために、他のテストがステップ720において行われることができる。例えば、RRLP測位要求メッセージ120は、支援データ・メッセージのリビッドがなされたら、少し遅れると決定されてもよい。RRLP測位要求メッセージ120は、以前のRRLP測位要求メッセージのリビッドがなされたら、非常に遅くなると決定されてもよい。代替的に、RRLP測位要求メッセージ120は、第1の所定の時間(例えば、24秒)よりも後、かつ、第2の所定の時間(例えば、、36秒)よりも前に通信される場合、少し遅れると決定されてもよい。RRLP測位要求メッセージ120は、第2の所定の時間よりも後に通信される場合、非常に遅くなると決定されてもよい。ステップ730において、MS10は、標準ネットワーク正確度(つまり、NW正確度)を使用する。ステップ740において、MS10は、その位置応答を早めるためにより低い正確度値(例えば、100、200、または250メートル)を使用する。
【0121】
図22は、本件発明の実施形態にしたがって、付加価値サービス(VAS)のためのメッセージ・フローを示している。VASの場合、MS10は、NW応答時間の全部の時間を使用する必要は無い。
【0122】
時間a(t = 0)において、ネットワーク70は、VASが起動されていると決定する。これを受けて、ネットワーク70は、RRLP支援データ・メッセージ140を送る。RRLP支援データ・メッセージ140を受信すると、MS10は、自分のGPSエンジンを始動し、その活動タイマーを所定の値にセットする(ESコールのケースで使用される値よりもより大きい値、例えば、Act_timer = 45秒)。さらに、RRLP支援データ・メッセージ140の受信に応じて、MS10は、時間bにおいて、RRLP支援データAckメッセージ142を送る。時間cおよびdにおいて、支援データの追加のセグメントが通信されてもよく、およびRRLP支援データ・メッセージ144およびRRLP支援データAckメッセージ146の追加のペアにより受領確認されてもよい。
【0123】
時間e(t = 20、Act_timer = 25)において、ネットワーク70は、標準ネットワーク時間(例えば、NW応答時間 = 16秒)および標準ネットワーク正確度の値(例えば、NW正確度 = 51.2メートル)を備えるRRLP測位要求メッセージを準備する。ネットワーク70は、RRLP測位要求メッセージ120を送り、MS10は、RRLP測位要求メッセージ120を受信する。ESコールと異なり、MS10は、ネットワークに提供されるいかなるパラメーターも廃棄しない。MS10は、その活動タイマー、活動応答タイマー、および活動正確度パラメーターをネットワーク提供の値にセットする(つまり、それぞれ、Act_timer = NW応答時間、Act_RT = NW応答時間、およびAct_Accuracy = NW正確度である。)。
【0124】
時間f(t = 34、Act_timer = 2)において、MS10は、RRLP測位要求メッセージ122で、ネットワーク70にその決定された位置を送る。この場合、MSは、位置不確実度が、要求されたネットワーク正確度よりも低いため、ネットワーク応答時間の満了の前に決定された確定を送った。最後に、決定された確定の報告に応答して、MS10は、GPSエンジンをシャットダウンする。
【0125】
本件発明は、添付の特許請求の範囲の要旨および範囲内で修正および変更して実行されてもよいということが理解されるべきである。本説明は、網羅的なものであるように意図されておらず、また開示された厳密な形式に制限されるようにも意図されていない。本件発明は、修正および変更して実行されることができるということが理解されるべきである。
【特許請求の範囲】
【請求項1】
ワイヤレス・ネットワーク内の移動局の位置データを強化する方法であって、前記方法は、前記移動局において、
ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを受信することと、
前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択することと、前記選択された正確度を使用して前記移動局の位置データを決定することと、
前記測位要求メッセージに応じる測位応答メッセージを形成することと、ここにおいて、前記測位応答メッセージは、前記位置データを具備する、
前記測位応答メッセージを送信することと
を具備する方法。
【請求項2】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項1に記載の方法。
【請求項3】
前記暫定的正確度は、100メートルを超える不確実度を表わす、請求項1に記載の方法。
【請求項4】
前記暫定的正確度は、前記ネットワーク正確度よりも高い正確度を表わす、請求項1に記載の方法。
【請求項5】
前記暫定的正確度は、10メートルよりも低い不確実度を表わす、請求項1に記載の方法。
【請求項6】
前記暫定的正確度は、0メートルの不確実度を表わす、請求項1に記載の方法。
【請求項7】
前記選択する動作は、リビッドが以前に生じたかどうかを決定することを具備する、請求項1に記載の方法。
【請求項8】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項1に記載の方法。
【請求項9】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項1に記載の方法。
【請求項10】
ワイヤレス・ネットワーク内の移動局の位置データを強化する方法であって、前記方法は、ネットワークにおいて、
ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択することと、
前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを送信することと、および
前記測位要求メッセージに応じる測位応答メッセージを受信することと、ここにおいて、前記測位応答メッセージは、位置データを具備する、
を具備する方法。
【請求項11】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項10に記載の方法。
【請求項12】
前記暫定的正確度は、100メートルを超える長さの不確実度を表わす、請求項10に記載の方法。
【請求項13】
前記暫定的正確度は、前記ネットワーク正確度より高い正確度を表わす、請求項10に記載の方法。
【請求項14】
前記暫定的正確度は、10メートルよりも低い不確実度を表わす、請求項10に記載の方法。
【請求項15】
前記暫定的正確度は、0メートルの不確実度を表わす、請求項10に記載の方法。
【請求項16】
前記選択する動作は、リビッドが以前に生じたかどうかに基づいて、前記選択された正確度を決定することを具備する、請求項10に記載の方法。
【請求項17】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項10に記載の方法。
【請求項18】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項10に記載の方法。
【請求項19】
ワイヤレス・ネットワーク内の移動局の位置データを強化するための前記移動局であって、前記移動局は、
ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを受信するための受信機と、
前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択するための論理と、前記選択された正確度を使用して前記移動局の位置データを決定するための位置決めエンジンと、
前記測位要求メッセージに応じる測位応答メッセージを形成するための論理であって、前記測位応答メッセージは、前記位置データを具備する、論理と
前記測位応答メッセージを送信するための送信機と
を具備する移動局。
【請求項20】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項19に記載の移動局。
【請求項21】
前記暫定的正確度は、前記ネットワーク正確度より高い正確度を表わす、請求項19に記載の移動局。
【請求項22】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項19に記載の移動局。
【請求項23】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項19に記載の移動局。
【請求項24】
ワイヤレス・ネットワーク内の移動局の位置データを強化するためのネットワークであって、前記ネットワークは、
ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択するための論理と、
前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを送信するための送信機と、および
前記測位要求メッセージに応じる測位応答メッセージを受信するための受信機であって、前記測位応答メッセージは、位置データを具備する、受信機と
を具備する。
【請求項25】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項24に記載のネットワーク。
【請求項26】
前記暫定的正確度は、前記ネットワーク正確度より高い正確度を表わす、請求項24に記載のネットワーク。
【請求項27】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項24に記載のネットワーク。
【請求項28】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項24に記載のネットワーク。
【請求項29】
ワイヤレス・ネットワーク内の移動局の位置データを強化するための前記移動局であって、前記移動局は、
ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを受信する手段と、
前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択する手段と、前記選択された正確度を使用して前記移動局の位置データを決定する手段と、
前記測位要求メッセージに応じる測位応答メッセージを形成する手段であって、前記測位応答メッセージは、前記位置データを具備する、手段と、
前記測位応答メッセージを送信する手段と
を具備する移動局。
【請求項30】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項29に記載の移動局。
【請求項31】
前記暫定的正確度は、前記ネットワーク正確度より高い正確度を表わす、請求項29に記載の移動局。
【請求項32】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項29に記載の移動局。
【請求項33】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項29に記載の移動局。
【請求項34】
ワイヤレス・ネットワーク内の移動局の位置データを強化するためのネットワークであって、前記ネットワークは、
ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択する手段と、
前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを送信する手段と、および
前記測位要求メッセージに応じる測位応答メッセージを受信する手段であって、前記測位応答メッセージは、位置データを具備する、手段と
を具備する。
【請求項35】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項34に記載のネットワーク。
【請求項36】
前記暫定的正確度は、前記ネットワーク正確度より高い正確度を表わす、請求項34に記載のネットワーク。
【請求項37】
前記選択する手段は、リビッドが以前に生じたかどうかに基づいて、前記選択された正確度を決定する手段を具備する、請求項34に記載のネットワーク。
【請求項38】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項34に記載のネットワーク。
【請求項39】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項34に記載のネットワーク。
【請求項40】
ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを少なくとも1つのコンピューターに受信させるためのコードと、
前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を少なくとも1つのコンピューターに選択させるためのコードと、前記選択された正確度を使用して前記移動局の位置データを少なくとも1つのコンピューターに決定させるためのコードと、
前記測位要求メッセージに応じる測位応答メッセージを少なくとも1つのコンピューターに形成させるためのコードであって、前記測位応答メッセージは、前記位置データを具備する、コードと、
前記測位応答メッセージを少なくとも1つのコンピューターに送信させるためのコードと
を具備するコンピューター可読媒体を具備するコンピューター可読プロダクト。
【請求項41】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項40に記載のコンピューター可読プロダクト。
【請求項42】
前記暫定的正確度は、前記ネットワーク正確度より高い正確度を表わす、請求項40に記載のコンピューター可読プロダクト。
【請求項43】
前記選択された正確度を使用して前記移動局の位置データを少なくとも1つのコンピューターに決定させるための前記コードは、リビッドが以前に生じたかどうかを少なくとも1つのコンピューターに決定させるためのコードを具備する、請求項40に記載のコンピューター可読プロダクト。
【請求項44】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項40に記載のコンピューター可読プロダクト。
【請求項45】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項40に記載のコンピューター可読プロダクト。
【請求項46】
ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を少なくとも1つのコンピューターに選択させるためのコードと、
前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを少なくとも1つのコンピューターに送信させるためのコードと、および
前記測位要求メッセージに応じる測位応答メッセージを少なくとも1つのコンピューターに受信させるためのコードであって、前記測位応答メッセージは、位置データを具備する、コードと
を具備するコンピューター可読媒体を具備するコンピューター可読プロダクト。
【請求項47】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項46に記載のコンピューター可読プロダクト。
【請求項48】
前記暫定的正確度は、前記ネットワーク正確度より高い正確度を表わす、請求項46に記載のコンピューター可読プロダクト。
【請求項49】
ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を少なくとも1つのコンピューターに選択させるための前記コードは、リビッドが以前に生じたかどうかに基づいて、前記選択された正確度を少なくとも1つのコンピューターに決定させるためのコードを具備する、請求項46に記載のコンピューター可読プロダクト。
【請求項50】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項46に記載のコンピューター可読プロダクト。
【請求項51】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項46に記載のコンピューター可読プロダクト。
【請求項1】
ワイヤレス・ネットワーク内の移動局の位置データを強化する方法であって、前記方法は、前記移動局において、
ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを受信することと、
前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択することと、前記選択された正確度を使用して前記移動局の位置データを決定することと、
前記測位要求メッセージに応じる測位応答メッセージを形成することと、ここにおいて、前記測位応答メッセージは、前記位置データを具備する、
前記測位応答メッセージを送信することと
を具備する方法。
【請求項2】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項1に記載の方法。
【請求項3】
前記暫定的正確度は、100メートルを超える不確実度を表わす、請求項1に記載の方法。
【請求項4】
前記暫定的正確度は、前記ネットワーク正確度よりも高い正確度を表わす、請求項1に記載の方法。
【請求項5】
前記暫定的正確度は、10メートルよりも低い不確実度を表わす、請求項1に記載の方法。
【請求項6】
前記暫定的正確度は、0メートルの不確実度を表わす、請求項1に記載の方法。
【請求項7】
前記選択する動作は、リビッドが以前に生じたかどうかを決定することを具備する、請求項1に記載の方法。
【請求項8】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項1に記載の方法。
【請求項9】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項1に記載の方法。
【請求項10】
ワイヤレス・ネットワーク内の移動局の位置データを強化する方法であって、前記方法は、ネットワークにおいて、
ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択することと、
前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを送信することと、および
前記測位要求メッセージに応じる測位応答メッセージを受信することと、ここにおいて、前記測位応答メッセージは、位置データを具備する、
を具備する方法。
【請求項11】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項10に記載の方法。
【請求項12】
前記暫定的正確度は、100メートルを超える長さの不確実度を表わす、請求項10に記載の方法。
【請求項13】
前記暫定的正確度は、前記ネットワーク正確度より高い正確度を表わす、請求項10に記載の方法。
【請求項14】
前記暫定的正確度は、10メートルよりも低い不確実度を表わす、請求項10に記載の方法。
【請求項15】
前記暫定的正確度は、0メートルの不確実度を表わす、請求項10に記載の方法。
【請求項16】
前記選択する動作は、リビッドが以前に生じたかどうかに基づいて、前記選択された正確度を決定することを具備する、請求項10に記載の方法。
【請求項17】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項10に記載の方法。
【請求項18】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項10に記載の方法。
【請求項19】
ワイヤレス・ネットワーク内の移動局の位置データを強化するための前記移動局であって、前記移動局は、
ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを受信するための受信機と、
前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択するための論理と、前記選択された正確度を使用して前記移動局の位置データを決定するための位置決めエンジンと、
前記測位要求メッセージに応じる測位応答メッセージを形成するための論理であって、前記測位応答メッセージは、前記位置データを具備する、論理と
前記測位応答メッセージを送信するための送信機と
を具備する移動局。
【請求項20】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項19に記載の移動局。
【請求項21】
前記暫定的正確度は、前記ネットワーク正確度より高い正確度を表わす、請求項19に記載の移動局。
【請求項22】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項19に記載の移動局。
【請求項23】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項19に記載の移動局。
【請求項24】
ワイヤレス・ネットワーク内の移動局の位置データを強化するためのネットワークであって、前記ネットワークは、
ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択するための論理と、
前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを送信するための送信機と、および
前記測位要求メッセージに応じる測位応答メッセージを受信するための受信機であって、前記測位応答メッセージは、位置データを具備する、受信機と
を具備する。
【請求項25】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項24に記載のネットワーク。
【請求項26】
前記暫定的正確度は、前記ネットワーク正確度より高い正確度を表わす、請求項24に記載のネットワーク。
【請求項27】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項24に記載のネットワーク。
【請求項28】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項24に記載のネットワーク。
【請求項29】
ワイヤレス・ネットワーク内の移動局の位置データを強化するための前記移動局であって、前記移動局は、
ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを受信する手段と、
前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択する手段と、前記選択された正確度を使用して前記移動局の位置データを決定する手段と、
前記測位要求メッセージに応じる測位応答メッセージを形成する手段であって、前記測位応答メッセージは、前記位置データを具備する、手段と、
前記測位応答メッセージを送信する手段と
を具備する移動局。
【請求項30】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項29に記載の移動局。
【請求項31】
前記暫定的正確度は、前記ネットワーク正確度より高い正確度を表わす、請求項29に記載の移動局。
【請求項32】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項29に記載の移動局。
【請求項33】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項29に記載の移動局。
【請求項34】
ワイヤレス・ネットワーク内の移動局の位置データを強化するためのネットワークであって、前記ネットワークは、
ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を選択する手段と、
前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを送信する手段と、および
前記測位要求メッセージに応じる測位応答メッセージを受信する手段であって、前記測位応答メッセージは、位置データを具備する、手段と
を具備する。
【請求項35】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項34に記載のネットワーク。
【請求項36】
前記暫定的正確度は、前記ネットワーク正確度より高い正確度を表わす、請求項34に記載のネットワーク。
【請求項37】
前記選択する手段は、リビッドが以前に生じたかどうかに基づいて、前記選択された正確度を決定する手段を具備する、請求項34に記載のネットワーク。
【請求項38】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項34に記載のネットワーク。
【請求項39】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項34に記載のネットワーク。
【請求項40】
ネットワーク正確度およびネットワーク応答時間を具備する測位要求メッセージを少なくとも1つのコンピューターに受信させるためのコードと、
前記ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を少なくとも1つのコンピューターに選択させるためのコードと、前記選択された正確度を使用して前記移動局の位置データを少なくとも1つのコンピューターに決定させるためのコードと、
前記測位要求メッセージに応じる測位応答メッセージを少なくとも1つのコンピューターに形成させるためのコードであって、前記測位応答メッセージは、前記位置データを具備する、コードと、
前記測位応答メッセージを少なくとも1つのコンピューターに送信させるためのコードと
を具備するコンピューター可読媒体を具備するコンピューター可読プロダクト。
【請求項41】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項40に記載のコンピューター可読プロダクト。
【請求項42】
前記暫定的正確度は、前記ネットワーク正確度より高い正確度を表わす、請求項40に記載のコンピューター可読プロダクト。
【請求項43】
前記選択された正確度を使用して前記移動局の位置データを少なくとも1つのコンピューターに決定させるための前記コードは、リビッドが以前に生じたかどうかを少なくとも1つのコンピューターに決定させるためのコードを具備する、請求項40に記載のコンピューター可読プロダクト。
【請求項44】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項40に記載のコンピューター可読プロダクト。
【請求項45】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項40に記載のコンピューター可読プロダクト。
【請求項46】
ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を少なくとも1つのコンピューターに選択させるためのコードと、
前記選択された正確度およびネットワーク応答時間を具備する測位要求メッセージを少なくとも1つのコンピューターに送信させるためのコードと、および
前記測位要求メッセージに応じる測位応答メッセージを少なくとも1つのコンピューターに受信させるためのコードであって、前記測位応答メッセージは、位置データを具備する、コードと
を具備するコンピューター可読媒体を具備するコンピューター可読プロダクト。
【請求項47】
前記暫定的正確度は、前記ネットワーク正確度よりも低い正確度を表わす、請求項46に記載のコンピューター可読プロダクト。
【請求項48】
前記暫定的正確度は、前記ネットワーク正確度より高い正確度を表わす、請求項46に記載のコンピューター可読プロダクト。
【請求項49】
ネットワーク正確度と、前記ネットワーク正確度とは異なる暫定的正確度との間の正確度を少なくとも1つのコンピューターに選択させるための前記コードは、リビッドが以前に生じたかどうかに基づいて、前記選択された正確度を少なくとも1つのコンピューターに決定させるためのコードを具備する、請求項46に記載のコンピューター可読プロダクト。
【請求項50】
前記測位要求メッセージは、RRLP測位要求メッセージを具備する、請求項46に記載のコンピューター可読プロダクト。
【請求項51】
前記測位応答メッセージは、RRLP測位応答メッセージを具備する、請求項46に記載のコンピューター可読プロダクト。
【図1A】


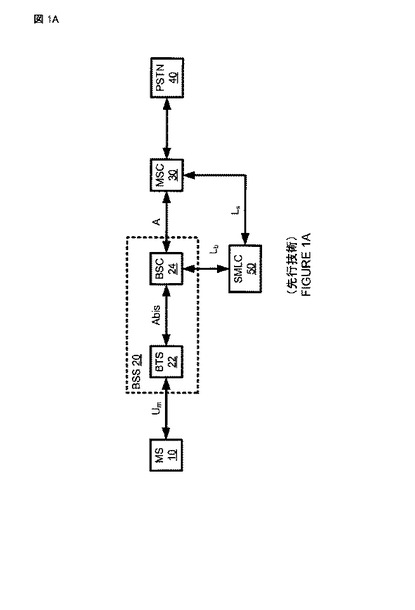
【図1B】
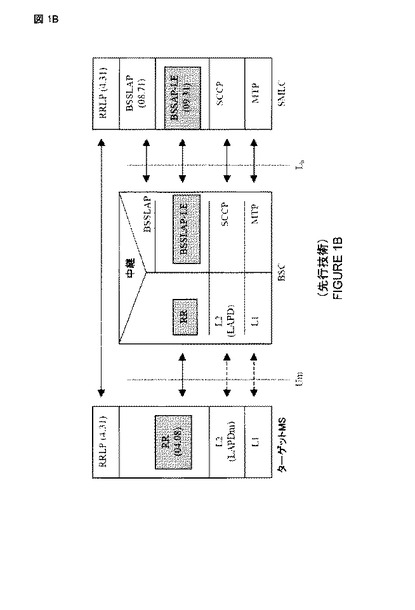
【図1C】
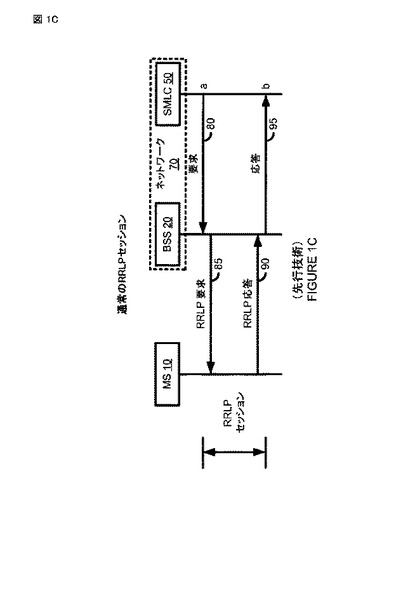
【図2】
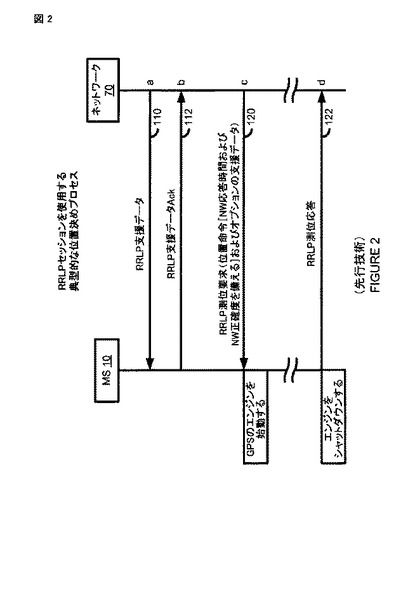
【図3】
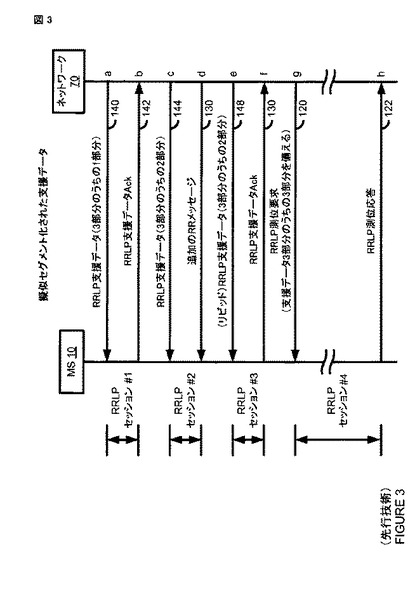
【図4】
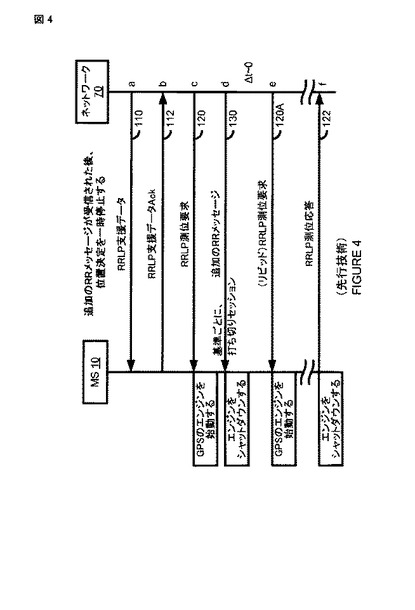
【図5】
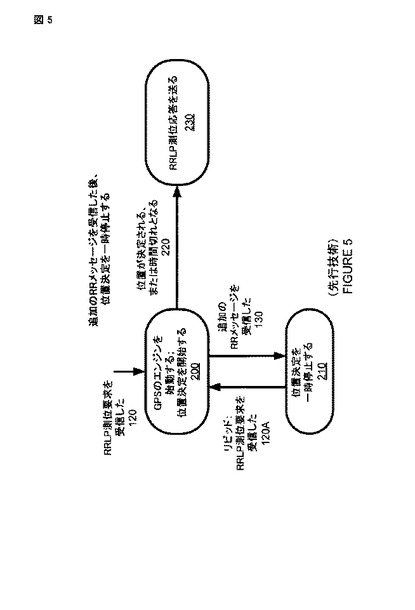
【図6】
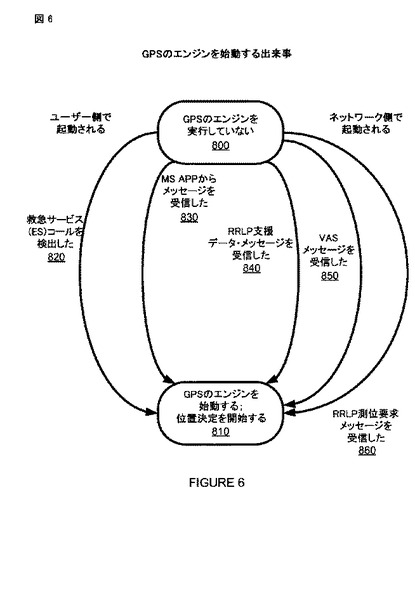
【図7】
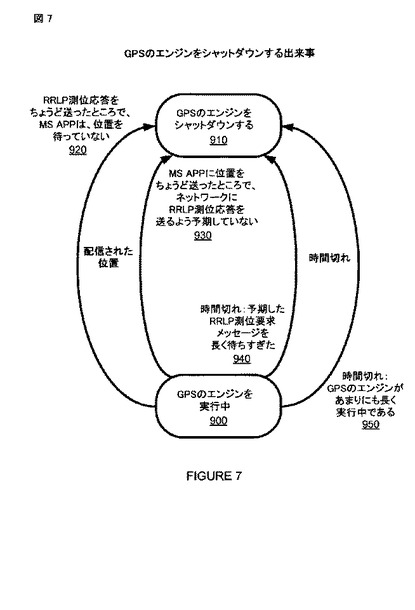
【図8】
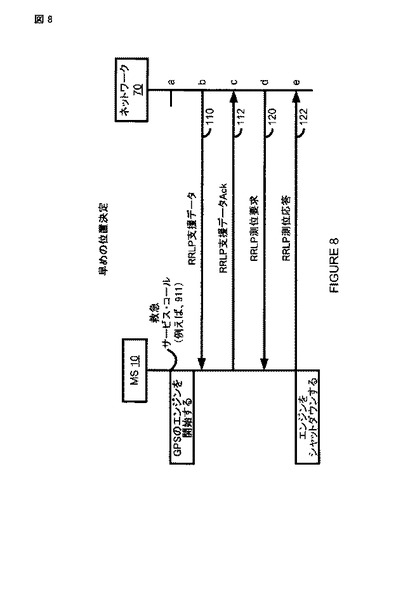
【図9】
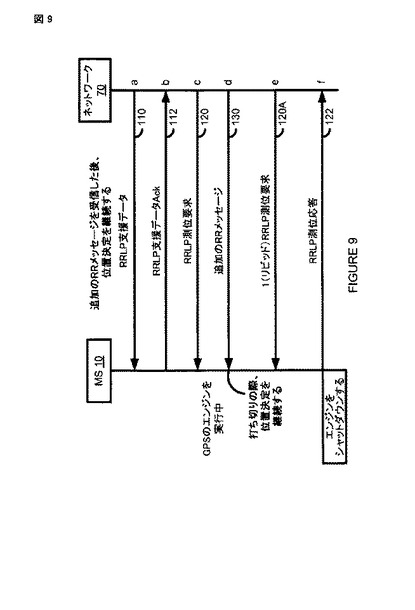
【図10】
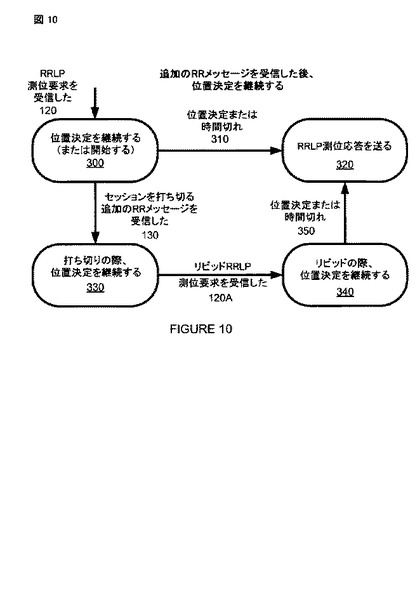
【図11】
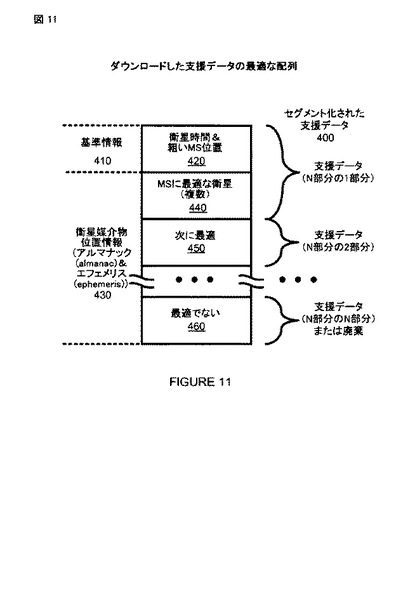
【図12】
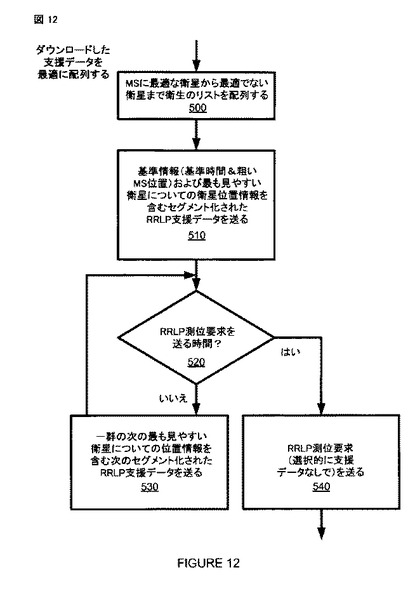
【図13】
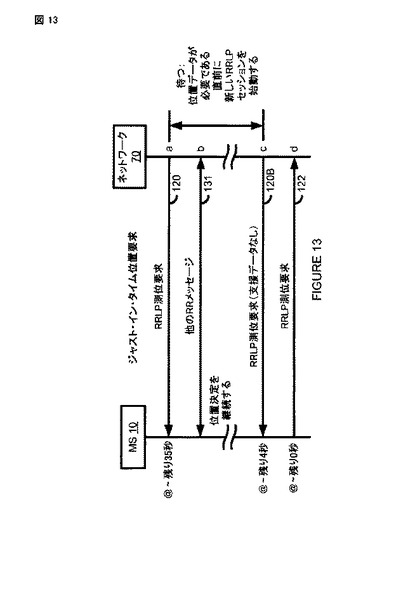
【図14】
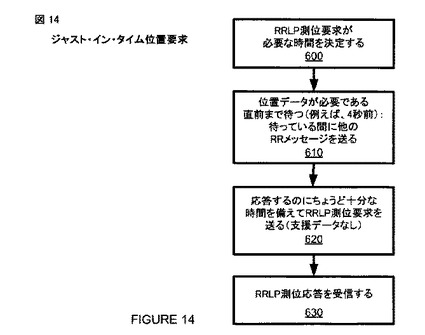
【図15】
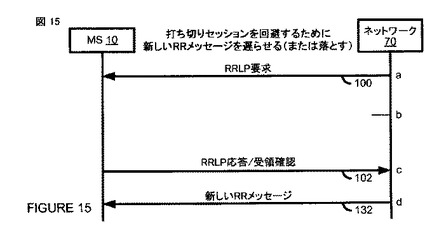
【図16】
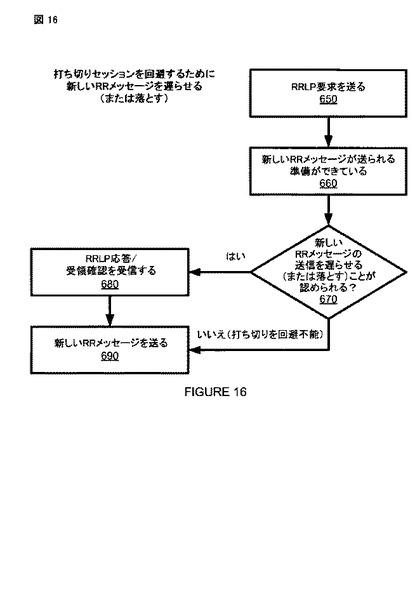
【図17】
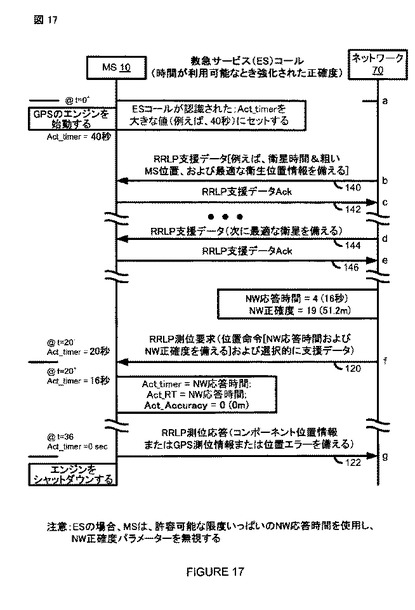
【図18】
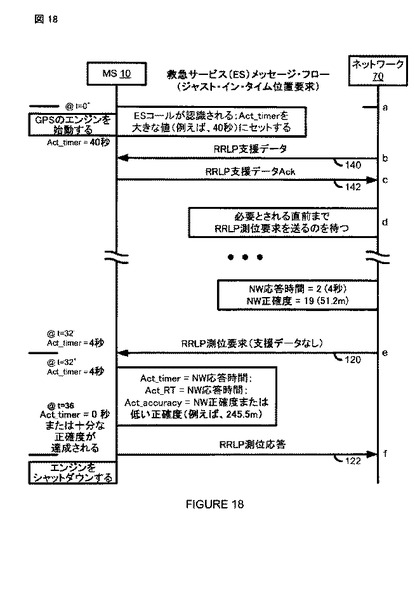
【図19】
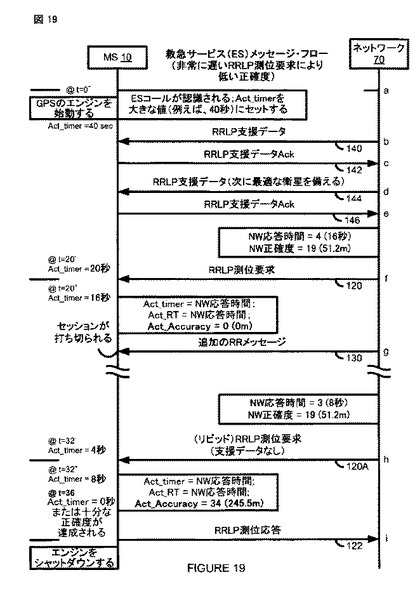
【図20】
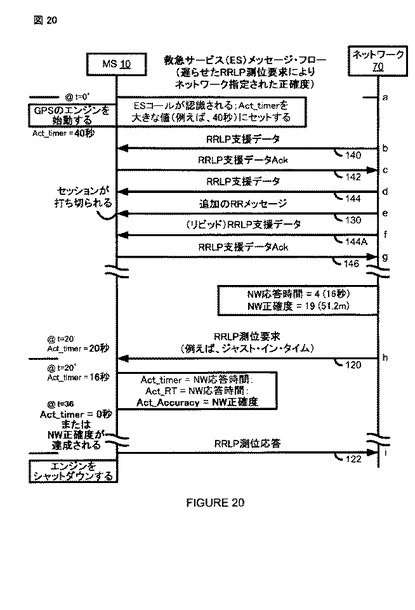
【図21】
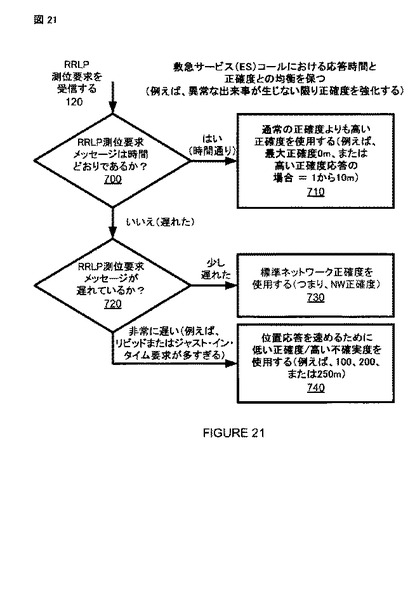
【図22】
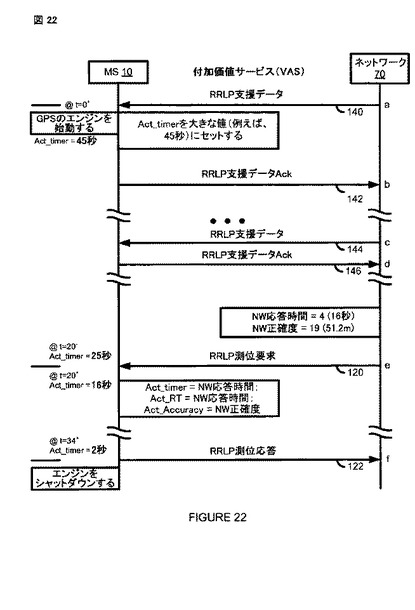
【図1B】
【図1C】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2013−40948(P2013−40948A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−196112(P2012−196112)
【出願日】平成24年9月6日(2012.9.6)
【分割の表示】特願2010−525003(P2010−525003)の分割
【原出願日】平成20年9月11日(2008.9.11)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.WCDMA
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2012−196112(P2012−196112)
【出願日】平成24年9月6日(2012.9.6)
【分割の表示】特願2010−525003(P2010−525003)の分割
【原出願日】平成20年9月11日(2008.9.11)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.WCDMA
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]