
移動物体検出装置、移動物体検出方法及び移動物体検出用コンピュータプログラム
【課題】レーダの検知範囲内に存在する静止物体を移動物体として誤検出することを抑制可能な移動物体検出装置を提供する。
【解決手段】移動物体検出装置(1)は、レーダ(2)から、そのレーダからの距離とその距離に位置する物体により反射されたレーダ波の強度を表す受信レベル信号との組を少なくとも一つ含む計測データを受信するインターフェース部(11)と、複数の計測データのそれぞれから第1の閾値以上となる受信レベル信号を検出し、レーダからの距離ごとに、第1の閾値以上となる受信レベル信号の出現頻度を表す背景値を求める背景データ更新部(21)と、計測データ中で第1の閾値よりも高い第2の閾値以上の強度を持つ受信レベル信号に対応する距離にある物体のうちで、背景値が静止物体に相当する値より小さい距離にある物体を移動物体として検出する移動物体検知部(22)とを有する。
【解決手段】移動物体検出装置(1)は、レーダ(2)から、そのレーダからの距離とその距離に位置する物体により反射されたレーダ波の強度を表す受信レベル信号との組を少なくとも一つ含む計測データを受信するインターフェース部(11)と、複数の計測データのそれぞれから第1の閾値以上となる受信レベル信号を検出し、レーダからの距離ごとに、第1の閾値以上となる受信レベル信号の出現頻度を表す背景値を求める背景データ更新部(21)と、計測データ中で第1の閾値よりも高い第2の閾値以上の強度を持つ受信レベル信号に対応する距離にある物体のうちで、背景値が静止物体に相当する値より小さい距離にある物体を移動物体として検出する移動物体検知部(22)とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、移動物体を、レーダによる計測データに基づいて検出する移動物体検出装置、移動物体検出方法及び移動物体検出用コンピュータプログラムに関する。
【背景技術】
【0002】
交通量に関する情報等を収集するために、道路上を走行する車両をレーダによる計測データに基づいて検出する技術が開発されている。走行中の車両を検知するシステムは、ガードレールなどの固定物、または駐車車両といった、一定期間以上にわたって移動しない物体である静止物体を走行中の車両として誤検出しないことが好ましい。そこで、静止物体の位置を表す背景データを求め、レーダによる計測データから背景データに表された静止物体の位置のデータを除いた残りのデータから走行中の車両を検出する技術が提案されている(例えば、特許文献1及び2を参照)。
【0003】
例えば、特許文献1に開示された障害物検出方法は、路側に設置したミリ波センサによるスキャンにより得られる計測データと障害物のない背景データとの差分から障害物候補を検出処理し、この処理を繰り返して常に障害物候補が存在する場合に障害物を検出する。また特許文献2に開示された走行車両検出方法は、道路上に設置したミリ波レーダによる走査ごとに車両を追跡し、得られた追跡データを用いて走行中の車両を検出する。そしてこの走行車両検出方法も、背景データを用いた背景差分により、ガードレールのような固定物に関する計測データを削除する。
そして、特許文献1及び2には、レーダの検知範囲内のそれぞれの距離における計測データから作成されるぼかしデータに、忘却係数を乗じた値を背景データに加算することで、背景データを更新することが記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−172980号公報
【特許文献2】特開2002−99986号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
レーダから出力される計測データには、レーダ波を反射した物体ごとに、レーダからその物体までの距離とともに、その物体により反射され、レーダにより受信されたレーダ波(以下、単に反射波と呼ぶ)の強度を表す受信レベル信号が含まれる。しかし、反射波の強度は、天候などの環境条件、あるいは、反射波に重畳されるノイズによって変動する。その結果、レーダから出力される計測データにおいても、反射波の強度変動に応じて受信レベル信号の強度が変動する。特に、静止物体による反射波の強度が低い場合、環境条件またはノイズによっては、その静止物体に相当する受信レベル信号の強度が検知すべきレベルに達しないことがある。そのため、特許文献1及び2に開示された技術では、背景データが適切に更新されず、その結果として、計測データから、レーダから静止物体までの距離に相当するデータが除かれないことがある。そのため、計測データ中で静止物体に相当する受信レベル信号の強度が偶然検知すべきレベルに達していると、静止物体が誤って走行中の車両として検出されてしまうおそれがあった。
【0006】
そこで本明細書は、レーダの検知範囲内に存在する静止物体を移動物体として誤検出することを抑制可能な移動物体検出装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
一つの実施形態によれば、移動物体検出装置が提供される。この移動物体検出装置は、レーダから、そのレーダからの距離とその距離に位置する物体により反射されたレーダ波の強度を表す受信レベル信号との組を少なくとも一つ含む計測データを受信するインターフェース部と、複数の計測データのそれぞれから第1の閾値以上となる受信レベル信号を検出し、レーダからの距離ごとに、第1の閾値以上となる受信レベル信号の出現頻度を表す背景値を求める背景データ更新部と、計測データ中で第1の閾値よりも高い第2の閾値以上の強度を持つ受信レベル信号に対応する距離にある物体のうちで、背景値が静止物体に相当する値より小さい距離にある物体を移動物体として検出する移動物体検知部とを有する。
【0008】
本発明の目的及び利点は、請求項において特に指摘されたエレメント及び組み合わせにより実現され、かつ達成される。
上記の一般的な記述及び下記の詳細な記述の何れも、例示的かつ説明的なものであり、請求項のように、本発明を限定するものではないことを理解されたい。
【発明の効果】
【0009】
本明細書に開示された移動物体検出装置は、レーダの検知範囲内に存在する静止物体を移動物体として誤検出することを抑制できる。
【図面の簡単な説明】
【0010】
【図1】一つの実施形態による移動物体検出装置の概略構成図である。
【図2】制御部の機能ブロック図である。
【図3】(a)は、レーダと固定物との位置関係の一例を示す図であり、(b)は、(a)に対応する背景データの一例を示す図である。
【図4】レーダから所定距離にある静止物体についての、計測データに含まれる受信レベル信号の強度の時間変化の一例を示す図である。
【図5】背景データ更新処理の動作フローチャートを示す。
【図6】移動物体検出処理の動作フローチャートを示す。
【発明を実施するための形態】
【0011】
以下、図を参照しつつ、一つの実施形態による、移動物体検出装置について説明する。
この移動物体検出装置は、例えば、路側に設置されたレーダからの計測データに基づいて、道路上を走行中の車両を移動物体として検出する。そしてこの移動物体検出装置は、静止物体が存在する位置を表す背景データを更新する際の受信レベル信号についての閾値を、走行車両を検知する際の受信レベル信号についての閾値よりも低く設定する。これにより、この移動物体検出装置は、レーダの検知範囲内に存在する静止物体を背景データに反映され易くして、静止物体が移動物体として誤検出されることを抑制する。
【0012】
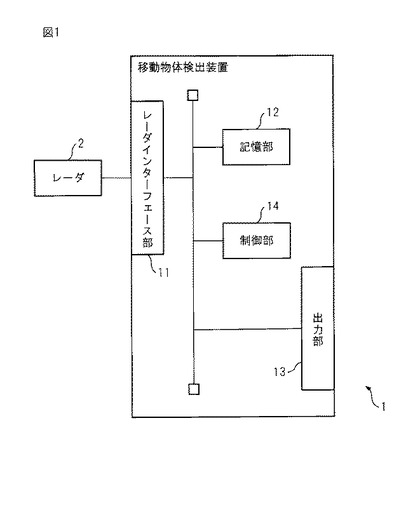
図1は、一つの実施形態による移動物体検出装置の概略構成図である。移動物体検出装置1は、レーダインターフェース部11と、記憶部12と、出力部13と、制御部14とを有する。そして移動物体検出装置1は、レーダインターフェース部11を介してレーダ2と接続される。
【0013】
本実施形態では、レーダ2は、周波数変調連続波(frequency modulated continuous wave、fmcw)方式により、レーダ波を反射した物体を検知する。そしてレーダ2は、例えば、車両が走行する道路の傍に設けられた支柱に設置される。なお、レーダ2は、例えば、交通状況を把握するなどの目的で設置された既存のレーダ検知器であってもよい。
【0014】
レーダ2は、道路上を走行中の車両へ向けてレーダ波を発信し、車両によって反射されたレーダ波を受信するように向きが調整されたレーダの送信アンテナ(図示せず)及び受信アンテナ(図示せず)を有する。本実施形態では、レーダ2の送信アンテナから放射されるレーダ波の水平方向及び垂直方向の放射角は、検知対象となる車両が走行する道路がレーダ2の検知範囲内に含まれるように設定される。
【0015】
レーダ2は、送信アンテナから送信される、三角波状に周波数が変化するレーダ波の一部と、受信アンテナにより検知した反射波とをミキシングする。そしてレーダ2は、周波数が高くなる上り区間と周波数が低くなる下り区間のそれぞれについて、反射波の周波数とレーダ波の周波数との差を表すビート信号を生成する。レーダ2は、このビート信号に基づいて、上り区間における反射波の周波数fup及び下り区間における反射波の周波数fdownを求めることにより、レーダ波を反射した物体までの距離及びその物体の速度を求める。そしてレーダ2は、一定周期(例えば、100msec)ごとに計測データを出力する。計測データは、所定の距離間隔で設定された複数の位置のそれぞれについて、反射波の強度を表す受信レベル信号と、レーダ2からその位置までの距離と、その位置にある物体の移動速度とを組とする計測値を含む。なお、所定の距離間隔は、レーダ2の距離の解像度に相当し、例えば、3m〜10m間隔に設定される。
【0016】
レーダインターフェース部11は、移動物体検出装置1をレーダ2と接続するためのインターフェース回路を有する。このインターフェース回路は、例えば、RS-232Cまたはユニバーサルシリアルバスといったシリアル通信規格に準拠した回路、あるいは、イーサネット(登録商標)に準拠した回路とすることができる。そしてレーダインターフェース部11は、レーダ2から計測データを受信し、その計測データを制御部14へ渡す。
【0017】
記憶部12は、例えば、読み書き可能な半導体メモリ回路と、読み出し専用の半導体メモリ回路とを有する。そして記憶部12は、レーダ2の検知範囲内を走行する車両を検出するために用いられ、制御部14上で動作するコンピュータプログラムを記憶する。また記憶部12は、走行中の車両を検出するために用いられる様々なデータ、例えば、レーダ2から受け取った計測データ及び背景データなどを記憶する。さらに記憶部12は、車両が検出された時刻、レーダ2から検出された車両までの距離及びその車両の移動速度など、検出された車両の情報を記憶してもよい。
【0018】
出力部13は、移動物体検出装置1を、他の機器、例えば、交通管理システムと接続するためのインターフェース回路を有する。このインターフェース回路は、例えば、イーサネット(登録商標)に準拠した回路とすることができる。そして出力部13は、制御部14から受け取った、走行中の車両に関する情報を他の機器へ出力する。
【0019】
制御部14は、移動物体検出装置1全体を制御する。また制御部14は、レーダ2から受け取った計測データに基づいて、レーダ2の検知範囲内を走行している車両を移動物体として検出する。そのために、制御部14は、少なくとも一つのプロセッサ及び周辺回路を有する。
【0020】
図2は、制御部14の機能ブロック図である。制御部14は、背景データ更新部21と、車両検知部22とを有する。制御部14が有するこれらの各部は、制御部14が有するプロセッサ上で実行されるコンピュータプログラムによって実現される機能モジュールである。あるいは、制御部14が有するこれらの各部は、それぞれ、別個の回路として移動物体検出装置1に実装されてもよい。
【0021】
背景データ更新部21は、レーダ2から過去に受信した複数の計測データに基づいて、レーダ2の検知範囲内に存在する静止物体の位置を表す背景データを更新する。
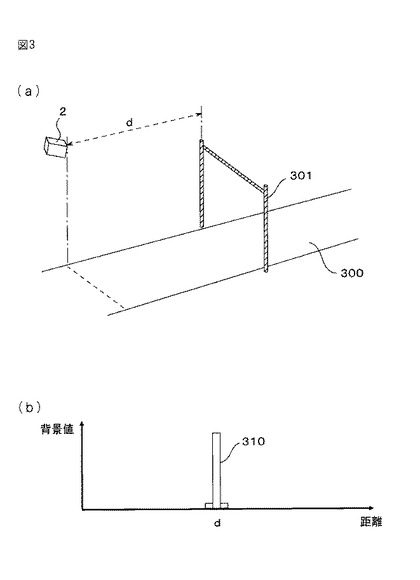
図3(a)及び図3(b)を参照しつつ、背景データについて説明する。図3(a)は、レーダ2と固定物との位置関係の一例を示す図である。
図3(a)に示されるように、レーダ2の検知範囲内において、レーダ2から距離dだけ離れた位置に、交通案内図などを掲示するための支柱301が道路300を跨ぐように設置され、この支柱301がレーダ波を反射するとする。そのため、レーダ2が計測データを生成する度に、その計測データには、距離dの位置における受信レベル信号は、その位置にレーダ波を反射する他の物体が存在しない限り、支柱301により反射されたレーダ波に相当する強度を持つ。したがって、計測データが得られる度に、ある一定以上の強度を持つ受信レベル信号が出現する頻度をレーダ2からの距離ごとに計数すれば、距離dにおける、その一定以上の強度を持つ受信レベル信号の出現頻度は高くなる。一方、走行している車両は、時間の経過とともに移動するので、ある一定以上の強度を持つ受信レベル信号が出現する頻度を距離ごとに計数しても、レーダ2から走行中の車両までの距離における一定以上の強度を持つ受信レベル信号の出現頻度は低い。このように、距離ごとに所定の閾値Thd以上の強度を持つ受信レベル信号が出現した頻度を集計すれば、その頻度の高いところに静止物体が存在することがわかる。そこで、背景データは、所定の閾値Thd以上の強度を持つ受信レベル信号が出現した頻度をレーダ2からの距離ごとに表すデータとして生成される。
【0022】
図3(b)は、図3(a)に対応する、背景データの一例を示す図である。図3(b)において、横軸は距離を表し、縦軸は背景値を表す。そして背景値は、計測データ中である一定以上の強度を持つ受信レベル信号が出現した頻度に相当する。図3(b)に示されるように、背景データ310では、レーダ2から支柱301までの距離dにおける背景値が高く、それ以外の距離では、背景値はほぼ0となっている。なお、距離dの前後において背景値が若干高くなっているのは、例えば、レーダ2により測定された支柱301までの距離に測定誤差が含まれるためである。
したがって、移動物体検出装置1は、走行中の車両を検出する際、レーダ2から得た計測データから、背景値が高い距離dに相当する計測値を除くことにより、支柱301を走行中の車両として誤検出することを防止できる。
【0023】
しかし、上記のように、支柱301により反射されたレーダ波が弱く、その結果計測データ中での距離dにおける受信レベル信号の強度が閾値Thdを挟んで変動すれば、背景値は十分に高くならない。この様子を図4を参照しつつ説明する。
【0024】
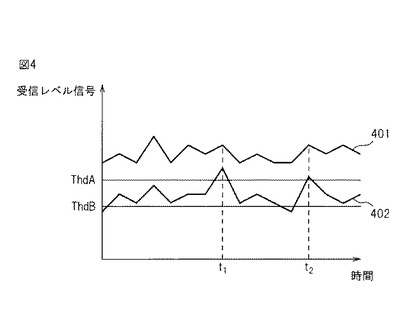
図4は、レーダ2から一つの静止物体までの距離における、計測データに含まれる受信レベル信号の強度の時間変化の一例を示す図である。図4において、横軸は時間を表し、縦軸は受信レベル信号の強度を表す。そしてグラフ401は、静止物体による反射波が十分に強い場合の受信レベル信号の強度の時間変化を表し、一方、グラフ402は、静止物体による反射波の強度が十分でない場合の受信レベル信号の強度の時間変化を表す。そして閾値ThdAは、後述する車両検知部22が走行車両を検出するために用いる受信レベル信号の閾値であり、例えば、検知すべき走行車両が存在しないときの受信レベル信号の強度の上限値に相当する値に設定される。
【0025】
反射波が十分に強ければ、グラフ401に示されるように、計測データ中の受信レベル信号が環境条件等により変動しても、その受信レベル信号は閾値ThdAより常に高くなる。そのため、背景データとして取り込む受信レベル信号の下限値が閾値ThdAであっても、レーダ2から静止物体までの距離における背景値は十分に大きな値となる。そのため、移動物体検出装置1は、静止物体を走行中の車両として誤検出することはない。
【0026】
しかし、反射波の強度が、走行中の車両として検知する反射波の強度の下限値に近い場合、環境条件等による反射波の強度変動により、受信レベル信号が閾値ThdAを超えないことがある。グラフ402に示される例では、受信レベル信号が閾値ThdAより高くなる時刻はt1とt2だけとなる。この場合、背景データとして取り込む受信レベル信号の下限値が閾値ThdAであれば、レーダ2から静止物体までの距離に相当する背景値は小さな値となる。そのため、移動物体検出処理を実行する際に、レーダ2から静止物体までの距離に対応する計測値が計測データから除かれなくなる。その結果として、移動物体検出装置1は、時刻t1及びt2において、静止物体を走行中の車両として誤検出するおそれがある。
【0027】
しかし、背景データとして取り込む受信信号レベルの下限値が閾値ThdAよりも低い閾値ThdBであれば、静止物体に相当する受信レベル信号がグラフ402に示されるレベルであっても、ほとんどの時刻において受信レベル信号は閾値ThdB以上となる。したがって、静止物体までの距離における背景値は十分に大きな値となる。
【0028】
そこで、背景データ更新部21は、背景データとして取り込む受信レベル信号の閾値ThdB(すなわち、第1の閾値)を、車両を検知する際の受信レベル信号の閾値ThdA(すなわち、第2の閾値)よりも低い値に設定する。閾値ThdBは、例えば、閾値ThdAよりも、環境条件あるいは反射波に重畳されるノイズ等による受信レベル信号の変動幅に相当する値だけ小さい値、例えば、閾値ThdAよりも2〜3dBmV小さい値に設定される。
【0029】
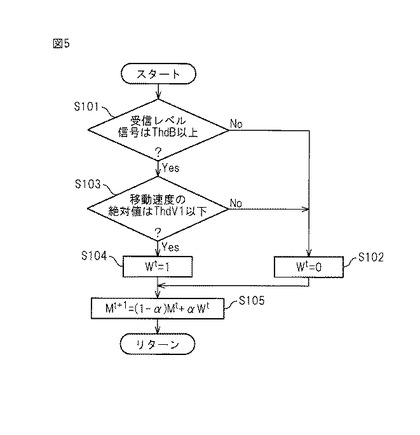
図5は、背景データ更新部21により実行される背景データ更新処理の動作フローチャートである。背景データ更新部21は、制御部14がレーダ2から計測データを受信する度に、あるいは、一定期間ごと(例えば、1秒ごと、30秒ごと、または1分ごと)に受信した計測データに基づいて、レーダ2からの距離ごとに背景データ更新処理を実行する。
背景データ更新部21は、計測データに含まれる注目する距離における受信レベル信号が閾値ThdB以上か否か判定する(ステップS101)。受信レベル信号が閾値ThdB未満であれば(ステップS101−No)、レーダ2からその距離だけ離れた位置に静止物体が存在する可能性は低い。そこで背景データ更新部21は、最新の計測データにおいて、物体が検出されたか否かを表す更新用データWtの値を0に設定する(ステップS102)。なお、本実施形態では、更新用データWtの値が大きいほど、Wtに対応する位置に物体が存在する可能性が高い。
【0030】
一方、受信レベル信号が閾値ThdB以上であれば(ステップS101−Yes)、レーダ2から注目する距離だけ離れた位置に走行中の車両または静止物体の何れかが存在する可能性がある。そこで、背景データ更新部21は、計測データにおいて、注目する距離に対応する物体の移動速度の絶対値が所定の速度閾値ThdV1以下か否か判定する(ステップS103)。なお、速度閾値ThdV1は、測定誤差を考慮した静止物体の移動速度の上限値であり、例えば、5km/hに設定される。注目する距離に対応する物体の移動速度の絶対値が速度閾値ThdV1よりも高ければ(ステップS103−No)、レーダ2からその距離だけ離れた位置にある物体は静止物体ではない。そこで背景データ更新部21は、更新用データWtの値を0に設定する(ステップS102)。
一方、注目する距離に対応する物体の移動速度の絶対値が速度閾値ThdV1以下であれば(ステップS103−Yes)、レーダ2からその距離だけ離れた位置にある物体は静止物体である可能性がある。そこで背景データ更新部21は、更新用データWtの値を1に設定する(ステップS104)。
【0031】
ステップS102またはS104の後、背景データ更新部21は、記憶部12に記憶されている背景データのうち、注目する距離の背景値を次式に従って更新する(ステップS105)。
【数1】

ここでMtは、更新前の注目する距離の背景値であり、Mt+1は、更新後の注目する距離の背景値を表す。そしてαは忘却係数であり、例えば、0.001〜0.01の範囲の何れかの値に設定される。(1)式から明らかなように、本実施形態では、背景値は0〜1の範囲内の何れかの値となる。これにより、背景データは、レーダ2の検知範囲内の静止物体の位置に関する最新の状況を表すことができる。なお、交通信号などにより一時停車中の車両が存在する場合には、レーダ2からその車両までの距離に対応する背景値は一時的に大きくなるものの、その車両が移動すれば背景値は低くなる。したがって、例えば、忘却係数を、車両が一時停車する期間中に取得される計測データの数の逆数よりも小さくすることにより、背景データ更新部21は、そのような一時停車中の車両に対応する背景値を低く抑制できる。
ステップS105の後、背景データ更新部21は、更新された背景データを記憶部12に記憶する。
【0032】
車両検知部22は、移動物体検知部の一例であり、レーダ2から制御部14が計測データを受け取る度に、その計測データに基づいて、レーダ2の検知範囲内を走行中の車両を検出する。
例えば、車両検知部22は、計測データから、背景データに含まれる背景値が所定の閾値Thdr以上となる距離についての計測値を削除する。これにより、車両検知部22は、静止物体を走行中の車両として誤認識することを抑制できる。なお、所定の閾値Thdrは、例えば、静止物体が存在する位置の背景値の最小値となるように実験的に定められ、例えば、背景値が取り得る最大値に0.3または0.4を乗じた値に設定される。車両検知部22は、残りの計測値のうち、受信レベル信号が閾値ThdA以上となる計測値を抽出する。そして車両検知部22は、その抽出された計測値に対応する距離に走行中の車両が存在すると判定する。そして車両検知部22は、計測データ中でその抽出された計測値に対応する移動速度を検知された車両の速度とする。
【0033】
なお、車両検知部22は、抽出された計測値に対応する移動速度の絶対値が所定の速度閾値ThdV2以上である場合にのみ、レーダ2からその距離だけ離れた位置に走行中の車両が存在すると判定してもよい。なお、速度閾値ThdV2は、例えば、レーダ2の検知範囲内を走行中の車両の平均速度から所定のオフセット値(例えば、20km/h〜30km/h)を減じた値に設定される。例えば、レーダ2の検知範囲内を走行中の車両が停止しないことが想定される場合には、車両検知部22は、このように一定以上の速度を持つ物体のみを移動物体として検出することで、静止物体を走行中の車両として誤検出する可能性をより低減できる。
【0034】
一方、移動物体検出装置1が、交通信号または渋滞により一時的に停車している車両も走行中の車両として検出する場合、車両検知部22は、一時停車中の車両が検出されないことを防止するために、上記のように移動速度によらずに車両を検出することが好ましい。
【0035】
車両検知部22は、レーダ2から検知した車両までの距離及びその車両の移動速度を、出力部13を介して他の機器へ出力する。
【0036】
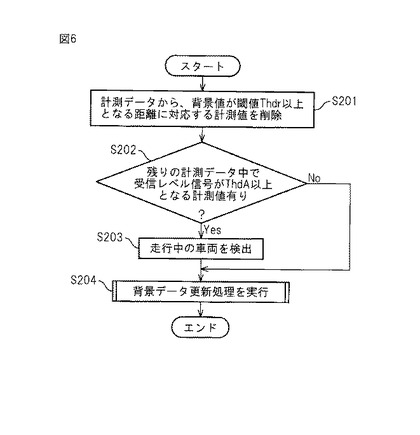
図6は、制御部14により実行される移動物体検出処理の動作フローチャートである。制御部14は、レーダ2から計測データを取得する度に、その最新の計測データに基づき、この動作フローチャートに従って移動物体検出処理を実行する。
制御部14の車両検知部22は、最新の計測データから、背景データに含まれる背景値が閾値Thdr以上となる距離に対応する計測値を削除する(ステップS201)。そして車両検知部22は、残りの計測値のうちで、受信レベル信号が閾値ThdA以上となる計測値があるか否か判定する(ステップS202)。受信レベル信号が閾値ThdA以上となる計測値が存在する場合(ステップS202−Yes)、車両検知部22は、受信レベル信号が閾値ThdA以上となる計測値に対応する距離に、走行中の車両の候補データが存在すると判定する(ステップS203)。そして車両検知部22は、例えば特許文献2に開示された方法により検出された車両に対応する距離及び移動速度を出力部13を介して他の機器へ出力する。
【0037】
ステップS203の後、あるいはステップS202にて受信レベル信号が閾値ThdA以上となる計測値が存在しないと判定された場合(ステップS202−Yes)、制御部14の背景データ更新部21は、背景データ更新処理を実行する(ステップS204)。その後、制御部14は、移動物体検出処理を終了する。
なお、制御部14は、ステップS204の処理を、S201〜S203の処理よりも前に実行してもよい。あるいは、制御部14は、ステップS204の処理と、ステップS201〜S203の処理を並列に実行してもよい。
【0038】
以上に説明してきたように、この移動物体検出装置は、背景データとして取り込む受信レベル信号の閾値を、移動物体検知に用いられる受信レベル信号の閾値よりも低い値とする。これにより、この移動物体検出装置は、環境条件などにより、静止物体による反射波の強度に相当する受信レベル信号の強度が移動物体検出用閾値を挟んで変動するような静止物体についても、背景データに反映させることができる。そのため、この移動物体検出装置は、静止物体を走行中の車両として誤検出することを抑制できる。
【0039】
なお、本発明は上記の実施形態に限定されるものではない。例えば、変形例によれば、レーダの送信アンテナ及び受信アンテナは、特定の方向へ向けてレーダ波を放射し、その特定方向からの反射波を受信する指向性を持つアンテナであってもよい。この場合には、レーダは、送信アンテナ及び受信アンテナを一定の周期(例えば、100msec周期)で水平方向の所定の角度範囲内を走査させる送信アンテナ及び受信アンテナの駆動機構をさらに有してもよい。この場合、計測データには、所定の走査角度間隔及び距離間隔で設定された複数の位置のそれぞれについて、レーダからその位置までの距離及び方位角と、反射波の強度を表す受信レベル信号と、その位置にある物体の移動速度とを組とする計測値が含まれる。
この場合、背景データは、所定の距離間隔で設定された距離と所定の走査角度間隔で設定された方位角の組ごとに背景値を有する。そして背景データ更新部も、距離及び方位角の組ごとに背景値を更新する。そして物体検知部は、距離及び方位角の組ごとに、背景値が閾値Thdr以上となるか否かを調べ、計測データから背景値が閾値Thdr以上となる距離及び方位角の組に対応する計測値を除き、残りの計測値に基づいて走行中の車両を検出する。
【0040】
また他の変形例によれば、背景データ更新部は、計測データ中に受信レベル信号が閾値ThdB以上となり、かつ移動速度の絶対値が閾値ThdV1以下となる計測値があると、その計測値に対応する距離と隣接する距離の更新用データに、0〜1の間の所定値を加算してもよい。これにより、背景データ更新部は、レーダの測定誤差などによる、静止物体の位置の揺らぎを背景データに反映させることができる。
【0041】
さらに他の変形例によれば、背景データ更新部は、最新の計測データの取得時を含む、一定期間中に取得された複数の計測データのそれぞれから、受信レベル信号が閾値ThdB以上となる計測値を検出してもよい。そして背景データ更新部は、レーダからの距離ごとに、その一定期間中における、閾値ThdB以上の強度を持つ受信レベル信号の出現頻度を背景値として求めてもよい。
【0042】
さらに他の変形例によれば、レーダは、パルス圧縮方式または二周波連続波(continuous wave、CW)方式に従ったレーダ装置であってもよい。この場合、制御部は、一定の周期ごとに、レーダから、所定の距離間隔で設定された複数の位置のそれぞれについて、反射波の強度を表す受信レベル信号を含む計測データを受け取る。そして車両検知部は、背景値が閾値Thdr未満であり、かつ、受信レベル信号が閾値ThdA以上である距離にある物体を、走行中の車両の候補として検出する。この場合、車両検知部は、例えば、最新の計測データにおいて検知された車両の候補についての現在位置と、所定回数(例えば、1回から数回)前に取得した計測データにおいて検知された車両の候補についての過去位置とを比較する。そして車両検知部は、現在位置から、その現在位置に最も近い過去位置までの距離をレーダの測定周期で割ることにより、現在位置における物体の速度を推定し、その推定値が所定の範囲内であれば、その現在位置にある物体を走行中の車両とする。
【0043】
また、検知対象となる物体は、走行中の車両に限られない。検知対象となる物体は、レーダ波を反射し、かつ移動する物体であればよい。
【0044】
また、上記の実施形態または変形例による制御部の機能をコンピュータに実現させる命令を有するコンピュータプログラムは、磁気記録媒体、光記録媒体あるいは不揮発性の半導体メモリといった、記録媒体に記録された形で提供されてもよい。
【0045】
ここに挙げられた全ての例及び特定の用語は、読者が、本発明及び当該技術の促進に対する本発明者により寄与された概念を理解することを助ける、教示的な目的において意図されたものであり、本発明の優位性及び劣等性を示すことに関する、本明細書の如何なる例の構成、そのような特定の挙げられた例及び条件に限定しないように解釈されるべきものである。本発明の実施形態は詳細に説明されているが、本発明の精神及び範囲から外れることなく、様々な変更、置換及び修正をこれに加えることが可能であることを理解されたい。
【符号の説明】
【0046】
1 移動物体検出装置
2 レーダ
11 レーダインターフェース部
12 記憶部
13 出力部
14 制御部
21 背景データ更新部
22 車両検知部
【技術分野】
【0001】
本発明は、例えば、移動物体を、レーダによる計測データに基づいて検出する移動物体検出装置、移動物体検出方法及び移動物体検出用コンピュータプログラムに関する。
【背景技術】
【0002】
交通量に関する情報等を収集するために、道路上を走行する車両をレーダによる計測データに基づいて検出する技術が開発されている。走行中の車両を検知するシステムは、ガードレールなどの固定物、または駐車車両といった、一定期間以上にわたって移動しない物体である静止物体を走行中の車両として誤検出しないことが好ましい。そこで、静止物体の位置を表す背景データを求め、レーダによる計測データから背景データに表された静止物体の位置のデータを除いた残りのデータから走行中の車両を検出する技術が提案されている(例えば、特許文献1及び2を参照)。
【0003】
例えば、特許文献1に開示された障害物検出方法は、路側に設置したミリ波センサによるスキャンにより得られる計測データと障害物のない背景データとの差分から障害物候補を検出処理し、この処理を繰り返して常に障害物候補が存在する場合に障害物を検出する。また特許文献2に開示された走行車両検出方法は、道路上に設置したミリ波レーダによる走査ごとに車両を追跡し、得られた追跡データを用いて走行中の車両を検出する。そしてこの走行車両検出方法も、背景データを用いた背景差分により、ガードレールのような固定物に関する計測データを削除する。
そして、特許文献1及び2には、レーダの検知範囲内のそれぞれの距離における計測データから作成されるぼかしデータに、忘却係数を乗じた値を背景データに加算することで、背景データを更新することが記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−172980号公報
【特許文献2】特開2002−99986号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
レーダから出力される計測データには、レーダ波を反射した物体ごとに、レーダからその物体までの距離とともに、その物体により反射され、レーダにより受信されたレーダ波(以下、単に反射波と呼ぶ)の強度を表す受信レベル信号が含まれる。しかし、反射波の強度は、天候などの環境条件、あるいは、反射波に重畳されるノイズによって変動する。その結果、レーダから出力される計測データにおいても、反射波の強度変動に応じて受信レベル信号の強度が変動する。特に、静止物体による反射波の強度が低い場合、環境条件またはノイズによっては、その静止物体に相当する受信レベル信号の強度が検知すべきレベルに達しないことがある。そのため、特許文献1及び2に開示された技術では、背景データが適切に更新されず、その結果として、計測データから、レーダから静止物体までの距離に相当するデータが除かれないことがある。そのため、計測データ中で静止物体に相当する受信レベル信号の強度が偶然検知すべきレベルに達していると、静止物体が誤って走行中の車両として検出されてしまうおそれがあった。
【0006】
そこで本明細書は、レーダの検知範囲内に存在する静止物体を移動物体として誤検出することを抑制可能な移動物体検出装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
一つの実施形態によれば、移動物体検出装置が提供される。この移動物体検出装置は、レーダから、そのレーダからの距離とその距離に位置する物体により反射されたレーダ波の強度を表す受信レベル信号との組を少なくとも一つ含む計測データを受信するインターフェース部と、複数の計測データのそれぞれから第1の閾値以上となる受信レベル信号を検出し、レーダからの距離ごとに、第1の閾値以上となる受信レベル信号の出現頻度を表す背景値を求める背景データ更新部と、計測データ中で第1の閾値よりも高い第2の閾値以上の強度を持つ受信レベル信号に対応する距離にある物体のうちで、背景値が静止物体に相当する値より小さい距離にある物体を移動物体として検出する移動物体検知部とを有する。
【0008】
本発明の目的及び利点は、請求項において特に指摘されたエレメント及び組み合わせにより実現され、かつ達成される。
上記の一般的な記述及び下記の詳細な記述の何れも、例示的かつ説明的なものであり、請求項のように、本発明を限定するものではないことを理解されたい。
【発明の効果】
【0009】
本明細書に開示された移動物体検出装置は、レーダの検知範囲内に存在する静止物体を移動物体として誤検出することを抑制できる。
【図面の簡単な説明】
【0010】
【図1】一つの実施形態による移動物体検出装置の概略構成図である。
【図2】制御部の機能ブロック図である。
【図3】(a)は、レーダと固定物との位置関係の一例を示す図であり、(b)は、(a)に対応する背景データの一例を示す図である。
【図4】レーダから所定距離にある静止物体についての、計測データに含まれる受信レベル信号の強度の時間変化の一例を示す図である。
【図5】背景データ更新処理の動作フローチャートを示す。
【図6】移動物体検出処理の動作フローチャートを示す。
【発明を実施するための形態】
【0011】
以下、図を参照しつつ、一つの実施形態による、移動物体検出装置について説明する。
この移動物体検出装置は、例えば、路側に設置されたレーダからの計測データに基づいて、道路上を走行中の車両を移動物体として検出する。そしてこの移動物体検出装置は、静止物体が存在する位置を表す背景データを更新する際の受信レベル信号についての閾値を、走行車両を検知する際の受信レベル信号についての閾値よりも低く設定する。これにより、この移動物体検出装置は、レーダの検知範囲内に存在する静止物体を背景データに反映され易くして、静止物体が移動物体として誤検出されることを抑制する。
【0012】
図1は、一つの実施形態による移動物体検出装置の概略構成図である。移動物体検出装置1は、レーダインターフェース部11と、記憶部12と、出力部13と、制御部14とを有する。そして移動物体検出装置1は、レーダインターフェース部11を介してレーダ2と接続される。
【0013】
本実施形態では、レーダ2は、周波数変調連続波(frequency modulated continuous wave、fmcw)方式により、レーダ波を反射した物体を検知する。そしてレーダ2は、例えば、車両が走行する道路の傍に設けられた支柱に設置される。なお、レーダ2は、例えば、交通状況を把握するなどの目的で設置された既存のレーダ検知器であってもよい。
【0014】
レーダ2は、道路上を走行中の車両へ向けてレーダ波を発信し、車両によって反射されたレーダ波を受信するように向きが調整されたレーダの送信アンテナ(図示せず)及び受信アンテナ(図示せず)を有する。本実施形態では、レーダ2の送信アンテナから放射されるレーダ波の水平方向及び垂直方向の放射角は、検知対象となる車両が走行する道路がレーダ2の検知範囲内に含まれるように設定される。
【0015】
レーダ2は、送信アンテナから送信される、三角波状に周波数が変化するレーダ波の一部と、受信アンテナにより検知した反射波とをミキシングする。そしてレーダ2は、周波数が高くなる上り区間と周波数が低くなる下り区間のそれぞれについて、反射波の周波数とレーダ波の周波数との差を表すビート信号を生成する。レーダ2は、このビート信号に基づいて、上り区間における反射波の周波数fup及び下り区間における反射波の周波数fdownを求めることにより、レーダ波を反射した物体までの距離及びその物体の速度を求める。そしてレーダ2は、一定周期(例えば、100msec)ごとに計測データを出力する。計測データは、所定の距離間隔で設定された複数の位置のそれぞれについて、反射波の強度を表す受信レベル信号と、レーダ2からその位置までの距離と、その位置にある物体の移動速度とを組とする計測値を含む。なお、所定の距離間隔は、レーダ2の距離の解像度に相当し、例えば、3m〜10m間隔に設定される。
【0016】
レーダインターフェース部11は、移動物体検出装置1をレーダ2と接続するためのインターフェース回路を有する。このインターフェース回路は、例えば、RS-232Cまたはユニバーサルシリアルバスといったシリアル通信規格に準拠した回路、あるいは、イーサネット(登録商標)に準拠した回路とすることができる。そしてレーダインターフェース部11は、レーダ2から計測データを受信し、その計測データを制御部14へ渡す。
【0017】
記憶部12は、例えば、読み書き可能な半導体メモリ回路と、読み出し専用の半導体メモリ回路とを有する。そして記憶部12は、レーダ2の検知範囲内を走行する車両を検出するために用いられ、制御部14上で動作するコンピュータプログラムを記憶する。また記憶部12は、走行中の車両を検出するために用いられる様々なデータ、例えば、レーダ2から受け取った計測データ及び背景データなどを記憶する。さらに記憶部12は、車両が検出された時刻、レーダ2から検出された車両までの距離及びその車両の移動速度など、検出された車両の情報を記憶してもよい。
【0018】
出力部13は、移動物体検出装置1を、他の機器、例えば、交通管理システムと接続するためのインターフェース回路を有する。このインターフェース回路は、例えば、イーサネット(登録商標)に準拠した回路とすることができる。そして出力部13は、制御部14から受け取った、走行中の車両に関する情報を他の機器へ出力する。
【0019】
制御部14は、移動物体検出装置1全体を制御する。また制御部14は、レーダ2から受け取った計測データに基づいて、レーダ2の検知範囲内を走行している車両を移動物体として検出する。そのために、制御部14は、少なくとも一つのプロセッサ及び周辺回路を有する。
【0020】
図2は、制御部14の機能ブロック図である。制御部14は、背景データ更新部21と、車両検知部22とを有する。制御部14が有するこれらの各部は、制御部14が有するプロセッサ上で実行されるコンピュータプログラムによって実現される機能モジュールである。あるいは、制御部14が有するこれらの各部は、それぞれ、別個の回路として移動物体検出装置1に実装されてもよい。
【0021】
背景データ更新部21は、レーダ2から過去に受信した複数の計測データに基づいて、レーダ2の検知範囲内に存在する静止物体の位置を表す背景データを更新する。
図3(a)及び図3(b)を参照しつつ、背景データについて説明する。図3(a)は、レーダ2と固定物との位置関係の一例を示す図である。
図3(a)に示されるように、レーダ2の検知範囲内において、レーダ2から距離dだけ離れた位置に、交通案内図などを掲示するための支柱301が道路300を跨ぐように設置され、この支柱301がレーダ波を反射するとする。そのため、レーダ2が計測データを生成する度に、その計測データには、距離dの位置における受信レベル信号は、その位置にレーダ波を反射する他の物体が存在しない限り、支柱301により反射されたレーダ波に相当する強度を持つ。したがって、計測データが得られる度に、ある一定以上の強度を持つ受信レベル信号が出現する頻度をレーダ2からの距離ごとに計数すれば、距離dにおける、その一定以上の強度を持つ受信レベル信号の出現頻度は高くなる。一方、走行している車両は、時間の経過とともに移動するので、ある一定以上の強度を持つ受信レベル信号が出現する頻度を距離ごとに計数しても、レーダ2から走行中の車両までの距離における一定以上の強度を持つ受信レベル信号の出現頻度は低い。このように、距離ごとに所定の閾値Thd以上の強度を持つ受信レベル信号が出現した頻度を集計すれば、その頻度の高いところに静止物体が存在することがわかる。そこで、背景データは、所定の閾値Thd以上の強度を持つ受信レベル信号が出現した頻度をレーダ2からの距離ごとに表すデータとして生成される。
【0022】
図3(b)は、図3(a)に対応する、背景データの一例を示す図である。図3(b)において、横軸は距離を表し、縦軸は背景値を表す。そして背景値は、計測データ中である一定以上の強度を持つ受信レベル信号が出現した頻度に相当する。図3(b)に示されるように、背景データ310では、レーダ2から支柱301までの距離dにおける背景値が高く、それ以外の距離では、背景値はほぼ0となっている。なお、距離dの前後において背景値が若干高くなっているのは、例えば、レーダ2により測定された支柱301までの距離に測定誤差が含まれるためである。
したがって、移動物体検出装置1は、走行中の車両を検出する際、レーダ2から得た計測データから、背景値が高い距離dに相当する計測値を除くことにより、支柱301を走行中の車両として誤検出することを防止できる。
【0023】
しかし、上記のように、支柱301により反射されたレーダ波が弱く、その結果計測データ中での距離dにおける受信レベル信号の強度が閾値Thdを挟んで変動すれば、背景値は十分に高くならない。この様子を図4を参照しつつ説明する。
【0024】
図4は、レーダ2から一つの静止物体までの距離における、計測データに含まれる受信レベル信号の強度の時間変化の一例を示す図である。図4において、横軸は時間を表し、縦軸は受信レベル信号の強度を表す。そしてグラフ401は、静止物体による反射波が十分に強い場合の受信レベル信号の強度の時間変化を表し、一方、グラフ402は、静止物体による反射波の強度が十分でない場合の受信レベル信号の強度の時間変化を表す。そして閾値ThdAは、後述する車両検知部22が走行車両を検出するために用いる受信レベル信号の閾値であり、例えば、検知すべき走行車両が存在しないときの受信レベル信号の強度の上限値に相当する値に設定される。
【0025】
反射波が十分に強ければ、グラフ401に示されるように、計測データ中の受信レベル信号が環境条件等により変動しても、その受信レベル信号は閾値ThdAより常に高くなる。そのため、背景データとして取り込む受信レベル信号の下限値が閾値ThdAであっても、レーダ2から静止物体までの距離における背景値は十分に大きな値となる。そのため、移動物体検出装置1は、静止物体を走行中の車両として誤検出することはない。
【0026】
しかし、反射波の強度が、走行中の車両として検知する反射波の強度の下限値に近い場合、環境条件等による反射波の強度変動により、受信レベル信号が閾値ThdAを超えないことがある。グラフ402に示される例では、受信レベル信号が閾値ThdAより高くなる時刻はt1とt2だけとなる。この場合、背景データとして取り込む受信レベル信号の下限値が閾値ThdAであれば、レーダ2から静止物体までの距離に相当する背景値は小さな値となる。そのため、移動物体検出処理を実行する際に、レーダ2から静止物体までの距離に対応する計測値が計測データから除かれなくなる。その結果として、移動物体検出装置1は、時刻t1及びt2において、静止物体を走行中の車両として誤検出するおそれがある。
【0027】
しかし、背景データとして取り込む受信信号レベルの下限値が閾値ThdAよりも低い閾値ThdBであれば、静止物体に相当する受信レベル信号がグラフ402に示されるレベルであっても、ほとんどの時刻において受信レベル信号は閾値ThdB以上となる。したがって、静止物体までの距離における背景値は十分に大きな値となる。
【0028】
そこで、背景データ更新部21は、背景データとして取り込む受信レベル信号の閾値ThdB(すなわち、第1の閾値)を、車両を検知する際の受信レベル信号の閾値ThdA(すなわち、第2の閾値)よりも低い値に設定する。閾値ThdBは、例えば、閾値ThdAよりも、環境条件あるいは反射波に重畳されるノイズ等による受信レベル信号の変動幅に相当する値だけ小さい値、例えば、閾値ThdAよりも2〜3dBmV小さい値に設定される。
【0029】
図5は、背景データ更新部21により実行される背景データ更新処理の動作フローチャートである。背景データ更新部21は、制御部14がレーダ2から計測データを受信する度に、あるいは、一定期間ごと(例えば、1秒ごと、30秒ごと、または1分ごと)に受信した計測データに基づいて、レーダ2からの距離ごとに背景データ更新処理を実行する。
背景データ更新部21は、計測データに含まれる注目する距離における受信レベル信号が閾値ThdB以上か否か判定する(ステップS101)。受信レベル信号が閾値ThdB未満であれば(ステップS101−No)、レーダ2からその距離だけ離れた位置に静止物体が存在する可能性は低い。そこで背景データ更新部21は、最新の計測データにおいて、物体が検出されたか否かを表す更新用データWtの値を0に設定する(ステップS102)。なお、本実施形態では、更新用データWtの値が大きいほど、Wtに対応する位置に物体が存在する可能性が高い。
【0030】
一方、受信レベル信号が閾値ThdB以上であれば(ステップS101−Yes)、レーダ2から注目する距離だけ離れた位置に走行中の車両または静止物体の何れかが存在する可能性がある。そこで、背景データ更新部21は、計測データにおいて、注目する距離に対応する物体の移動速度の絶対値が所定の速度閾値ThdV1以下か否か判定する(ステップS103)。なお、速度閾値ThdV1は、測定誤差を考慮した静止物体の移動速度の上限値であり、例えば、5km/hに設定される。注目する距離に対応する物体の移動速度の絶対値が速度閾値ThdV1よりも高ければ(ステップS103−No)、レーダ2からその距離だけ離れた位置にある物体は静止物体ではない。そこで背景データ更新部21は、更新用データWtの値を0に設定する(ステップS102)。
一方、注目する距離に対応する物体の移動速度の絶対値が速度閾値ThdV1以下であれば(ステップS103−Yes)、レーダ2からその距離だけ離れた位置にある物体は静止物体である可能性がある。そこで背景データ更新部21は、更新用データWtの値を1に設定する(ステップS104)。
【0031】
ステップS102またはS104の後、背景データ更新部21は、記憶部12に記憶されている背景データのうち、注目する距離の背景値を次式に従って更新する(ステップS105)。
【数1】
ここでMtは、更新前の注目する距離の背景値であり、Mt+1は、更新後の注目する距離の背景値を表す。そしてαは忘却係数であり、例えば、0.001〜0.01の範囲の何れかの値に設定される。(1)式から明らかなように、本実施形態では、背景値は0〜1の範囲内の何れかの値となる。これにより、背景データは、レーダ2の検知範囲内の静止物体の位置に関する最新の状況を表すことができる。なお、交通信号などにより一時停車中の車両が存在する場合には、レーダ2からその車両までの距離に対応する背景値は一時的に大きくなるものの、その車両が移動すれば背景値は低くなる。したがって、例えば、忘却係数を、車両が一時停車する期間中に取得される計測データの数の逆数よりも小さくすることにより、背景データ更新部21は、そのような一時停車中の車両に対応する背景値を低く抑制できる。
ステップS105の後、背景データ更新部21は、更新された背景データを記憶部12に記憶する。
【0032】
車両検知部22は、移動物体検知部の一例であり、レーダ2から制御部14が計測データを受け取る度に、その計測データに基づいて、レーダ2の検知範囲内を走行中の車両を検出する。
例えば、車両検知部22は、計測データから、背景データに含まれる背景値が所定の閾値Thdr以上となる距離についての計測値を削除する。これにより、車両検知部22は、静止物体を走行中の車両として誤認識することを抑制できる。なお、所定の閾値Thdrは、例えば、静止物体が存在する位置の背景値の最小値となるように実験的に定められ、例えば、背景値が取り得る最大値に0.3または0.4を乗じた値に設定される。車両検知部22は、残りの計測値のうち、受信レベル信号が閾値ThdA以上となる計測値を抽出する。そして車両検知部22は、その抽出された計測値に対応する距離に走行中の車両が存在すると判定する。そして車両検知部22は、計測データ中でその抽出された計測値に対応する移動速度を検知された車両の速度とする。
【0033】
なお、車両検知部22は、抽出された計測値に対応する移動速度の絶対値が所定の速度閾値ThdV2以上である場合にのみ、レーダ2からその距離だけ離れた位置に走行中の車両が存在すると判定してもよい。なお、速度閾値ThdV2は、例えば、レーダ2の検知範囲内を走行中の車両の平均速度から所定のオフセット値(例えば、20km/h〜30km/h)を減じた値に設定される。例えば、レーダ2の検知範囲内を走行中の車両が停止しないことが想定される場合には、車両検知部22は、このように一定以上の速度を持つ物体のみを移動物体として検出することで、静止物体を走行中の車両として誤検出する可能性をより低減できる。
【0034】
一方、移動物体検出装置1が、交通信号または渋滞により一時的に停車している車両も走行中の車両として検出する場合、車両検知部22は、一時停車中の車両が検出されないことを防止するために、上記のように移動速度によらずに車両を検出することが好ましい。
【0035】
車両検知部22は、レーダ2から検知した車両までの距離及びその車両の移動速度を、出力部13を介して他の機器へ出力する。
【0036】
図6は、制御部14により実行される移動物体検出処理の動作フローチャートである。制御部14は、レーダ2から計測データを取得する度に、その最新の計測データに基づき、この動作フローチャートに従って移動物体検出処理を実行する。
制御部14の車両検知部22は、最新の計測データから、背景データに含まれる背景値が閾値Thdr以上となる距離に対応する計測値を削除する(ステップS201)。そして車両検知部22は、残りの計測値のうちで、受信レベル信号が閾値ThdA以上となる計測値があるか否か判定する(ステップS202)。受信レベル信号が閾値ThdA以上となる計測値が存在する場合(ステップS202−Yes)、車両検知部22は、受信レベル信号が閾値ThdA以上となる計測値に対応する距離に、走行中の車両の候補データが存在すると判定する(ステップS203)。そして車両検知部22は、例えば特許文献2に開示された方法により検出された車両に対応する距離及び移動速度を出力部13を介して他の機器へ出力する。
【0037】
ステップS203の後、あるいはステップS202にて受信レベル信号が閾値ThdA以上となる計測値が存在しないと判定された場合(ステップS202−Yes)、制御部14の背景データ更新部21は、背景データ更新処理を実行する(ステップS204)。その後、制御部14は、移動物体検出処理を終了する。
なお、制御部14は、ステップS204の処理を、S201〜S203の処理よりも前に実行してもよい。あるいは、制御部14は、ステップS204の処理と、ステップS201〜S203の処理を並列に実行してもよい。
【0038】
以上に説明してきたように、この移動物体検出装置は、背景データとして取り込む受信レベル信号の閾値を、移動物体検知に用いられる受信レベル信号の閾値よりも低い値とする。これにより、この移動物体検出装置は、環境条件などにより、静止物体による反射波の強度に相当する受信レベル信号の強度が移動物体検出用閾値を挟んで変動するような静止物体についても、背景データに反映させることができる。そのため、この移動物体検出装置は、静止物体を走行中の車両として誤検出することを抑制できる。
【0039】
なお、本発明は上記の実施形態に限定されるものではない。例えば、変形例によれば、レーダの送信アンテナ及び受信アンテナは、特定の方向へ向けてレーダ波を放射し、その特定方向からの反射波を受信する指向性を持つアンテナであってもよい。この場合には、レーダは、送信アンテナ及び受信アンテナを一定の周期(例えば、100msec周期)で水平方向の所定の角度範囲内を走査させる送信アンテナ及び受信アンテナの駆動機構をさらに有してもよい。この場合、計測データには、所定の走査角度間隔及び距離間隔で設定された複数の位置のそれぞれについて、レーダからその位置までの距離及び方位角と、反射波の強度を表す受信レベル信号と、その位置にある物体の移動速度とを組とする計測値が含まれる。
この場合、背景データは、所定の距離間隔で設定された距離と所定の走査角度間隔で設定された方位角の組ごとに背景値を有する。そして背景データ更新部も、距離及び方位角の組ごとに背景値を更新する。そして物体検知部は、距離及び方位角の組ごとに、背景値が閾値Thdr以上となるか否かを調べ、計測データから背景値が閾値Thdr以上となる距離及び方位角の組に対応する計測値を除き、残りの計測値に基づいて走行中の車両を検出する。
【0040】
また他の変形例によれば、背景データ更新部は、計測データ中に受信レベル信号が閾値ThdB以上となり、かつ移動速度の絶対値が閾値ThdV1以下となる計測値があると、その計測値に対応する距離と隣接する距離の更新用データに、0〜1の間の所定値を加算してもよい。これにより、背景データ更新部は、レーダの測定誤差などによる、静止物体の位置の揺らぎを背景データに反映させることができる。
【0041】
さらに他の変形例によれば、背景データ更新部は、最新の計測データの取得時を含む、一定期間中に取得された複数の計測データのそれぞれから、受信レベル信号が閾値ThdB以上となる計測値を検出してもよい。そして背景データ更新部は、レーダからの距離ごとに、その一定期間中における、閾値ThdB以上の強度を持つ受信レベル信号の出現頻度を背景値として求めてもよい。
【0042】
さらに他の変形例によれば、レーダは、パルス圧縮方式または二周波連続波(continuous wave、CW)方式に従ったレーダ装置であってもよい。この場合、制御部は、一定の周期ごとに、レーダから、所定の距離間隔で設定された複数の位置のそれぞれについて、反射波の強度を表す受信レベル信号を含む計測データを受け取る。そして車両検知部は、背景値が閾値Thdr未満であり、かつ、受信レベル信号が閾値ThdA以上である距離にある物体を、走行中の車両の候補として検出する。この場合、車両検知部は、例えば、最新の計測データにおいて検知された車両の候補についての現在位置と、所定回数(例えば、1回から数回)前に取得した計測データにおいて検知された車両の候補についての過去位置とを比較する。そして車両検知部は、現在位置から、その現在位置に最も近い過去位置までの距離をレーダの測定周期で割ることにより、現在位置における物体の速度を推定し、その推定値が所定の範囲内であれば、その現在位置にある物体を走行中の車両とする。
【0043】
また、検知対象となる物体は、走行中の車両に限られない。検知対象となる物体は、レーダ波を反射し、かつ移動する物体であればよい。
【0044】
また、上記の実施形態または変形例による制御部の機能をコンピュータに実現させる命令を有するコンピュータプログラムは、磁気記録媒体、光記録媒体あるいは不揮発性の半導体メモリといった、記録媒体に記録された形で提供されてもよい。
【0045】
ここに挙げられた全ての例及び特定の用語は、読者が、本発明及び当該技術の促進に対する本発明者により寄与された概念を理解することを助ける、教示的な目的において意図されたものであり、本発明の優位性及び劣等性を示すことに関する、本明細書の如何なる例の構成、そのような特定の挙げられた例及び条件に限定しないように解釈されるべきものである。本発明の実施形態は詳細に説明されているが、本発明の精神及び範囲から外れることなく、様々な変更、置換及び修正をこれに加えることが可能であることを理解されたい。
【符号の説明】
【0046】
1 移動物体検出装置
2 レーダ
11 レーダインターフェース部
12 記憶部
13 出力部
14 制御部
21 背景データ更新部
22 車両検知部
【特許請求の範囲】
【請求項1】
レーダから、該レーダからの距離と当該距離に位置する物体により反射されたレーダ波の強度を表す受信レベル信号との組を少なくとも一つ含む計測データを受信するインターフェース部と、
複数の前記計測データのそれぞれから第1の閾値以上となる前記受信レベル信号を検出し、前記レーダからの距離ごとに、当該第1の閾値以上となる前記受信レベル信号の出現頻度を表す背景値を求める背景データ更新部と、
前記計測データ中で前記第1の閾値よりも高い第2の閾値以上の強度を持つ前記受信レベル信号に対応する距離にある物体のうちで、前記背景値が静止物体に相当する値より小さい距離にある物体を移動物体として検出する移動物体検知部と、
を有する移動物体検出装置。
【請求項2】
前記第1の閾値は、物体により反射され、前記レーダにより受信された前記レーダ波の強度の変動幅に相当する値だけ前記第2の閾値よりも小さい値に設定される、請求項1に記載の移動物体検出装置。
【請求項3】
レーダから、該レーダからの距離と当該距離に位置する物体により反射されたレーダ波の強度を表す受信レベル信号との組を少なくとも一つ含む計測データを受信し、
複数の前記計測データのそれぞれから第1の閾値以上となる前記受信レベル信号を検出し、前記レーダからの距離ごとに、当該第1の閾値以上となる前記受信レベル信号の出現頻度を表す背景値を求め、
前記計測データ中で前記第1の閾値よりも高い第2の閾値以上の強度を持つ前記受信レベル信号に対応する距離にある物体のうちで、前記背景値が静止物体に相当する値より小さい距離にある物体を移動物体として検出する、
ことを含む移動物体検出方法。
【請求項4】
レーダから、該レーダからの距離と当該距離に位置する物体により反射されたレーダ波の強度を表す受信レベル信号との組を少なくとも一つ含む計測データを受信し、
複数の前記計測データのそれぞれから第1の閾値以上となる前記受信レベル信号を検出し、前記レーダからの距離ごとに、当該第1の閾値以上となる前記受信レベル信号の出現頻度を表す背景値を求め、
前記計測データ中で前記第1の閾値よりも高い第2の閾値以上の強度を持つ前記受信レベル信号に対応する距離にある物体のうちで、前記背景値が静止物体に相当する値より小さい距離にある物体を移動物体として検出する、
ことをコンピュータに実行させる命令を含む移動物体検出用コンピュータプログラム。
【請求項1】
レーダから、該レーダからの距離と当該距離に位置する物体により反射されたレーダ波の強度を表す受信レベル信号との組を少なくとも一つ含む計測データを受信するインターフェース部と、
複数の前記計測データのそれぞれから第1の閾値以上となる前記受信レベル信号を検出し、前記レーダからの距離ごとに、当該第1の閾値以上となる前記受信レベル信号の出現頻度を表す背景値を求める背景データ更新部と、
前記計測データ中で前記第1の閾値よりも高い第2の閾値以上の強度を持つ前記受信レベル信号に対応する距離にある物体のうちで、前記背景値が静止物体に相当する値より小さい距離にある物体を移動物体として検出する移動物体検知部と、
を有する移動物体検出装置。
【請求項2】
前記第1の閾値は、物体により反射され、前記レーダにより受信された前記レーダ波の強度の変動幅に相当する値だけ前記第2の閾値よりも小さい値に設定される、請求項1に記載の移動物体検出装置。
【請求項3】
レーダから、該レーダからの距離と当該距離に位置する物体により反射されたレーダ波の強度を表す受信レベル信号との組を少なくとも一つ含む計測データを受信し、
複数の前記計測データのそれぞれから第1の閾値以上となる前記受信レベル信号を検出し、前記レーダからの距離ごとに、当該第1の閾値以上となる前記受信レベル信号の出現頻度を表す背景値を求め、
前記計測データ中で前記第1の閾値よりも高い第2の閾値以上の強度を持つ前記受信レベル信号に対応する距離にある物体のうちで、前記背景値が静止物体に相当する値より小さい距離にある物体を移動物体として検出する、
ことを含む移動物体検出方法。
【請求項4】
レーダから、該レーダからの距離と当該距離に位置する物体により反射されたレーダ波の強度を表す受信レベル信号との組を少なくとも一つ含む計測データを受信し、
複数の前記計測データのそれぞれから第1の閾値以上となる前記受信レベル信号を検出し、前記レーダからの距離ごとに、当該第1の閾値以上となる前記受信レベル信号の出現頻度を表す背景値を求め、
前記計測データ中で前記第1の閾値よりも高い第2の閾値以上の強度を持つ前記受信レベル信号に対応する距離にある物体のうちで、前記背景値が静止物体に相当する値より小さい距離にある物体を移動物体として検出する、
ことをコンピュータに実行させる命令を含む移動物体検出用コンピュータプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−50322(P2013−50322A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−187074(P2011−187074)
【出願日】平成23年8月30日(2011.8.30)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月30日(2011.8.30)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]