
移動物体監視システム
【課題】監視エリアにいる人物と携帯機とを対応付けし、携帯機を持たない不審者を確実に検出する。
【解決手段】移動物体が携帯機を帯同しているか否かを監視する移動物体監視システムであって、センシングにより監視エリアに存在する移動物体の位置情報を検出し、また、携帯機が発した無線信号から当該携帯機の位置情報を検出し、位置情報の一致性に基づいて移動物体と携帯機とを対応付けする。このとき、移動物体の位置情報に応じて、一定判定の基準を異ならせる。これにより、監視エリア内のセキュリティレベルが高い場所ほど厳格な基準で移動物体と携帯機との対応付けがなされ、利便性と安全性を兼ねた高品質な移動物体の識別・監視を行うことができる。
【解決手段】移動物体が携帯機を帯同しているか否かを監視する移動物体監視システムであって、センシングにより監視エリアに存在する移動物体の位置情報を検出し、また、携帯機が発した無線信号から当該携帯機の位置情報を検出し、位置情報の一致性に基づいて移動物体と携帯機とを対応付けする。このとき、移動物体の位置情報に応じて、一定判定の基準を異ならせる。これにより、監視エリア内のセキュリティレベルが高い場所ほど厳格な基準で移動物体と携帯機との対応付けがなされ、利便性と安全性を兼ねた高品質な移動物体の識別・監視を行うことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、監視エリアにおいて移動物体を監視するシステムに関する。
【背景技術】
【0002】
従来、建物内やその周辺領域を監視エリアとし、居住者や従業員等、当該エリアの正当な利用者にICタグ等の携帯機を帯同させて監視するシステムが提案されている。例えば、監視エリアにて人物を検知したときに、当該人物が携帯機を帯同しているか否かを携帯機が発する無線信号に基づいて判定し、当該人物が正規の利用者であるか否か識別することができる。
【0003】
下記特許文献1に示される警備システムでは、警戒エリアにて熱線センサが移動物体を検知すると、従業員が所持する携帯カードの識別番号の読み取り動作を実施し、登録されている識別番号が読み取れない場合にはこの移動物体を侵入者と判断して異常警報する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−144160号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
監視エリアにて熱線センサが人物を検知したとき、単に監視エリア内にて携帯機の存在が検知されているだけでは、その人物が真に携帯機を所持しているか判断できない。つまり、人物および携帯機の検知範囲が人間一人分の広さ程度に狭ければ、検知された人物が検知された携帯機を所持していると推定し得るが、通常、建物内やその周辺領域を監視する際は広範囲の監視エリアが用いられるため、検知された人物とは別の位置に携帯機が存在している場合に当該人物が正規利用者と誤認識されてしまう。具体的には、監視エリア内に携帯機が遺失物として存在する場合や、携帯機を所持しない人物の他に携帯機を所持した正規利用者が併存する場合などが想定され、この場合には監視エリア内での人物の識別・監視が精度良くなされない可能性がある。
【0006】
本発明は上記問題点を解決するためになされたものであり、移動物体がICタグ等の携帯機を帯同しているか否かの識別・監視を的確に行える移動物体監視システムの提供を目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために本発明の移動物体監視システムは、移動物体が携帯機を帯同しているか否かを監視する移動物体監視システムであって、センシングにより監視エリアの移動物体を検出し当該移動物体の位置情報を取得する物体検出手段と、前記携帯機が発した無線信号を受信し当該携帯機の位置情報を検出する携帯機検出手段と、前記移動物体の位置情報と前記携帯機の位置情報とが所定の一致基準を満たす場合に当該移動物体と当該携帯機とを対応付けする対応判定手段と、を有し、前記対応判定手段は、前記位置情報に応じて異なる前記一致基準を用いて前記対応付けの判定を実行する、ことを特徴とする。
かかる構成によれば、監視エリア内のセキュリティレベルが高い場所ほど一致基準を厳格化して移動物体と携帯機との対応付けがなされ難くすることができ、利便性と安全性を兼ねた高品質な移動物体の識別・監視を行うことができる。
【0008】
また、上記構成において、前記対応判定手段は、少なくとも、前記移動物体と前記携帯機との位置情報の相違量が許容値未満の場合に前記一致基準を満たすと判定し、前記位置情報に応じて異なる前記許容値を用いる。
【0009】
また、上記構成において、前記監視エリアは進入規制区域の周囲に設定され、前記対応判定手段は、前記監視エリアにおける前記進入規制区域に近い場所の前記一致基準を当該進入規制区域から遠い場所より厳しくする。
また、上記構成において、前記監視エリアは進入規制区域の周囲に設定され、前記対応判定手段は、前記進入規制区域の入口に近い場所の前記一致基準を当該入口から遠い場所より厳しくする。
かかる構成によれば、進入規制区域への侵入行為の危険性が高い状況において厳格な対応付け判定を行うため、不審物体による侵入行為を確実に排除することができる。
【0010】
また、上記構成において、更に、前記移動物体の位置情報を追跡して特定行動を検出し、前記特定行動が検出された移動物体と前記携帯機との対応付けの有無に基づいて異常判定を行う異常判定手段を有する。
【発明の効果】
【0011】
本発明によれば、移動物体および携帯機の位置関係に基づき帯同判定するともに、その判定基準を場所毎のセキュリティレベルに応じて異ならせることで、利便性と安全性を兼ねた移動物体の識別・監視を行うことができる。
【図面の簡単な説明】
【0012】
【図1】本実施形態の監視システムの概略全体構成図である。
【図2】人物と無線タグとの対応関係を示す監視エリアの模式的な平面図である。
【図3】リンク処理手段におけるリンク処理を示すフローチャートである。
【図4】リンク処理手段におけるリンク維持判定処理を示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、本発明に係る移動物体監視システムの実施形態として、建物の敷地内に不正侵入した不審者を検出して異常警報する監視システムを例に説明する。
【0014】
本実施形態の監視システムは、例えば、サービス利用者の家屋の監視に適用される。家屋の敷地にあたる庭を監視エリアとし、監視エリアへの不審者の侵入を検出して異常警報を行う。利用者には予め携帯機が与えられ、家屋の出入りの際には携帯機を所持する。監視システムは、敷地外から監視エリアに入った人物を検出して、その人物に関する位置情報を得る。また、携帯機から電波を受信することで携帯機の存在を検知し、受信した無線信号を解析して携帯機に関する位置情報を得る。そして、人物に関する位置情報と携帯機に関する位置情報とを比較して、相互の位置関係が所定の一致基準を満たす場合に当該人物が当該携帯機を所持しているとみなし、正規の利用者であると認識する。一方、一致基準を満たさない場合は検出した人物は携帯機を所持しない不審者であると認識し、例えば庭内での滞留行為や建物内への入館行為に対して異常警報を出力する。
【0015】
ここで、位置情報とは監視エリアにおける人物や携帯機の所在を示す情報であり、監視エリア内での位置や方位を用いることができる。例えば、監視エリアを2次元の極座標系で表したとき、座標上の位置(角度、距離)や方位(角度)を採用し得る。本実施形態の監視システムでは、位置情報として方位を用い、方位の一致性に基づき人物が携帯機を所持しているかの帯同判定を行うものとする。
【0016】
携帯機の方位検出は、携帯機が発した電波の到来方向や受信強度を解析することで特定される。しかし、電波の到来方向や受信強度は、壁等の反射など環境要因による様々な影響を受けるため、携帯機の方位検出は特性上やむを得ない不安定さを含む。したがって、人物と携帯機との方位一致性の判定に際し、不安定さを吸収しようと緩い一致基準を用いれば不審者による侵入行為を許容してしまう可能性が生じ、一方、厳格な一致基準を用いれば正規の利用者を不審者として誤判定してしまう可能性がある。
【0017】
そこで本実施形態の監視システムでは、監視エリア内の各領域に応じた異なる一致基準を用いて、人物と携帯機との方位一致性を判定する。すなわち、監視エリアのうち、不審行為を確実に排除したいと考えるセキュリティレベルが高い場所については、他の場所より厳格な一致基準を用いる。例えばセキュリティレベルが高い場所は、監視対象である家屋に隣接する領域や、家屋の出入口や屋内への侵入経路となり得る場所の周辺領域である。
このように、場所に応じて帯同判定の基準を異ならせることで、利便性とセキュリティ性を兼ねた監視システムを実現する。
【0018】
以下、本実施形態の監視システムの具体的な構成および動作について、図面を参照して説明する。
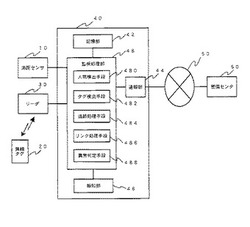
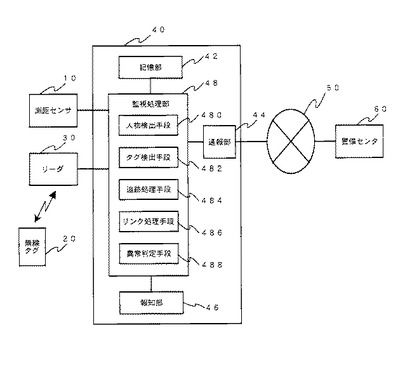
図1は、本実施形態の監視システムの概略全体構成図である。監視システムは、主として、センサ部10、無線タグ20、リーダ部30、監視装置40を含んで構成され、建物の周囲の敷地を監視エリアとする。建物の敷地内や建物に侵入した不審者を検出すると、インターネット網などの通信回線50を介して遠隔の警備センタ60に異常発生を通報する。異常通報を受けた警備センタ60は、現地に警備員を派遣する等の緊急対処を実施する。また、監視システムに別途カメラ(図示せず)を設け、異常発生時の画像を警備センタ60で確認できるように構成しておけば、警備センタ60の監視員が現場の状況を的確に把握できる。
【0019】
センサ部10は、監視エリアにおける人物の位置情報を検出する機能を有する。本実施形態ではセンサ部10としてレーザ測距センサを用い、レーザ光により監視エリアを走査し、レーザ光を反射した物体の位置を検出する。例えば、波長890nm程度の近赤外光のレーザ光源を備え、光源からのレーザパルスを等速に回転駆動される走査鏡で反射させてその出射方向を変え、監視エリアの全域に対して順次投光する。また、センサ部10は物体にて反射されたレーザパルスを受光して、当該物体までの測距データを生成する。レーザ光の走査は、センサ部10を中心として監視エリアを望む角度範囲(例えば水平方向に180゜)に対して、所定の周期(例えば200ミリ秒)で繰り返される。そして測距は、走査角度範囲内の所定の角度ステップ(例えば0.25゜)ごとに飛行時間法(TOF法:Time of Flight)を用いて行われ、具体的には、レーザパルスの出射から受光までに要する時間を計測し、この時間と光速度とからレーザ光を反射した物体までの距離を算出する。センサ部10は、1周期分の各走査角ごとの測定距離をまとめて測距データを作成し、監視装置40へ出力する。
【0020】
センサ部10は上述したレーザ測距センサには限定されず、例えば、マイクロ波やミリ波等の電波を使用するレーダセンサや、超音波を送受信する超音波センサ(ソナーセンサ)等でも同様に構成可能である。また、画像センサを用いて、背景差分やフレーム間差分により人物を抽出し、画像上の水平方向座標から人物の方位を求め、垂直方向座標から逆透視変換により人物までの距離を推定することで測距データを生成することもできる。この場合、画像センサは斜め上方から監視エリアを撮影するよう設置される。
【0021】
無線タグ20は、建物への出入りが認められた利用者に予め与えられる携帯機であり、監視対象である建物の出入りの際に帯同される。無線タグ20は、リーダ部30との間で電波を用いた無線通信を行い、予め記憶されている無線タグ20ごとに固有の識別情報(以下、タグIDと称す)を含む無線信号を送出する。無線通信方式には、RF−ID(Radio Frequency IDentification)技術を利用する。無線タグ20の利用周波数や駆動方式は限定されるものではないが、建物の敷地内の監視用途とするため比較的長距離の通信に適したUHF帯あるいは2.4GHz帯の周波数を利用する。また、リーダ部30からの質問信号に対し、自己のバッテリを駆動源としてタグIDを含む応答信号を発信するセミアクティブ型とする。なお、無線タグ20に振動検知センサを設け、振動検知中、つまり移動中のみ無線信号を発信する方式としてもよい。
【0022】
リーダ部30は、無線タグ20が発した無線信号を受信して、所定の検知範囲に存在する無線タグ10を検知するタグリーダである。リーダ部30による検知範囲は、監視エリアと略一致させておく。リーダ部30は、監視エリアに送出した質問信号に対して無線タグ20が発した応答信号を受信し、応答信号に含まれる該無線タグ20を識別するタグIDを抽出する。
【0023】
また、リーダ部30は質問信号または応答信号に基づいて無線タグ20の位置情報を検出するための構成を有する。監視装置40は無線タグ20の位置情報として、リーダ部30から視た無線タグ20が存在する方位を検出する。そのための構成の一例として、リーダ部30は、それぞれ比較的狭いビーム幅(例えば10°)の指向性を有し、互いにビーム方向(指向角)をずらして配置された複数のアンテナを備え、それら複数のアンテナを一定時間間隔で切り替えながら質問信号の送出および応答信号の受信を行う。リーダ部30は、当該送受信が所定周期(例えば200ミリ秒)ごとに検知対象の角度範囲(例えば360°)に対して順次行われるように指向性を制御する。そして指向角ごとに無線タグ20からの応答信号の受信強度を取得し、タグIDごとに、1周期分の各方位に対する受信強度をまとめたタグ検知データを作成し、監視装置40に出力する。つまり、タグ検知データは無線タグ20ごとの受信強度の方位分布を示す。
【0024】
上述の例では指向角をビーム幅に応じたステップで変化させる構成を示したが、ビーム幅よりも細かいステップ(例えば5°ずつ)とし、隣り合うビーム間をオーバーラップさせて構成させてもよい。この場合、より小さい確度で無線タグ20の方位を検出できる。
また、アンテナの指向性を切り替え可能な他の構成を用いることもできる。例えば、或る方向に強い指向性を有する単一のアンテナを回転させて指向角を順次切り替える構成や、フェーズドアレイアンテナのように電子的制御により指向角を切り替える構成も採り得る。また、送信アンテナと受信アンテナとを別構成とし、一方だけに指向性を持たせる構成としてもよい。
【0025】
なお、後述する監視装置40でのリンク処理のために、測距データが示す位置とタグ検知データが示す方位との関係を予め定義しておく必要がある。本実施形態では、それぞれの視軸が実質的に一致するようにリーダ部30とセンサ部10を近傍に配置し、センサ部10の走査角とリーダ部30の指向角、すなわち測距データにおける角度(方位)とタグ検知データにおける角度(方位)とが共通の座標系で表現可能に予め調整される。好ましくはリーダ部30及びセンサ部10を同一の筐体内に配置する。
【0026】
また、本実施形態の監視システムでは一組の測距センサ10及びリーダ部30で構成しているが、監視対象の領域の形状に応じて複数組の測距センサ及びリーダ部を用いて構成する。例えば、建物の周囲4面を監視する場合には、少なくとも2組の測距センサ及びリーダ部を敷地内の対角に設ける。建物の壁面に設置する場合には、各面に対して計4組の測距センサ及びリーダ部を設置する。
【0027】
監視装置40は、センサ部10及びリーダ部30と無線または有線で接続され、センサ部10から送出された測距データ、リーダ部30から送出されたタグ検知データを入力して監視処理を実行し、異常検出時には遠隔の警備センタ60へ異常通報を行う。
監視装置40は、主に、記憶部42、通報部44、報知部46、監視処理部48を含んで構成される。
【0028】
記憶部42は、ROMやRAM等で構成され、監視処理部48で実行される各種プログラムやそれに必要なデータが格納される。また記憶部42は、予め利用者に付与した無線タグ20のタグIDの情報(登録タグデータ)、移動物体が存在しない状態でセンサ部10が監視エリアを走査して得た測距データ(基準測距データ)を記憶する。また、検出された人物ごとの行動(移動軌跡など)を管理する追跡データを記憶する。追跡データは監視処理部48によって随時作成、更新、削除される。
【0029】
また記憶部42は、監視エリアに関するマップ情報を記憶する。マップ情報は、監視エリア全体の領域を表す情報、及び、監視エリアのうちセキュリティレベルを他より高く設定する領域(以下、重要エリアと呼ぶ)を表す情報を含む。重要エリアは、無線タグ20を帯同しない人物の行動を強く排除したい場所が設定される。例えば、監視エリアの境界のうち監視対象の建物から一定距離内の領域や、建物の出入口付近の領域は、不審者が建物へ侵入する直前にいる場所にあたるため、他の場所よりセキュリティレベルを高くすべき重要エリアとする。重要エリアの場所や形状は上記に限らず、監視エリア内の任意の領域を設定できる。
【0030】
通報部44は、通信回線50を介して警備センタ60と通信し、異常信号等の各種データを送信するための通信インターフェースである。
報知部46は、ブザーやスピーカ、警告ランプ等で構成され、異常が発生した旨を周囲に報知したり不審者を威嚇するための手段である。なお、報知部46は監視装置40と別体にセンサ部10及びリーダ部30と併設させてもよい。
【0031】
監視処理部48は、マイクロプロセッサ等を用いて構成され、実行されるプログラムに応じて、センサ部10から入力される測距データ、及びリーダ部30から入力されるタグ検知データに基づく監視処理を行う。具体的には、監視処理部48は実行プログラムとして、人物検出手段480、タグ検出手段482、追跡処理手段484、リンク処理手段486、異常判定手段488を持つ。
【0032】
人物検出手段480は、センサ部10と共に、監視エリアにおける人物の位置情報を検出する物体検出手段を構成する。人物検出手段480は、センサ部10から入力される測距データを記憶部42の基準測距データと比較し、距離が同一物体を示している程度に同等であり、且つ、基準測距データとの距離変化が所定以上生じている走査角のまとまり(距離変化群)を抽出する。そして、距離変化群における距離及び角度範囲から把握される移動物体の大きさが人を示す程度である場合に、当該移動物体を人物として認識し、当該人物を検出した方位及び距離を人物の位置とする。具体的には、人物を示す距離変化群の角度範囲の中心角を人物の検出方位(人物方位)、その角度範囲内の距離の平均を人物までの距離とし、人検知データを生成する。測距データ中に複数の距離変化群が抽出された場合は、それぞれについて人物判定および位置の検出を行う。なお、距離変化群をなす角度範囲内の平均距離値ではなく、中心角の距離や中央値など他の代表値を人物の距離としてもよい。
【0033】
タグ検出手段482は、リーダ部30と共に、監視エリアにおける無線タグ20の位置情報を検出する携帯機検出手段を構成する。タグ検出手段482は、リーダ部30から入力される1周期分のタグ検知データを入力し、検出された各タグIDごとに、登録タグIDを参照して予め登録されたタグIDか判定する。登録されたタグIDの場合は、タグIDに関する受信強度の方位分布を解析し、最も受信強度が大きいピーク指向角を該無線タグの検出方位(タグ方位)とする。指向角には一定の角度範囲があるため、ピーク指向角の中心角度を代表してタグ方位に用いる。なお、無線タグの方位検出方法については、例えば、受信強度の方位分布のパターンを基準パターンと比較してタグ方位を求める方法や、受信強度が最大であるピーク指向角を他の方位の受信強度との関係で補正する方法など、公知の技術で代替可能である。
【0034】
追跡処理手段484は、人物検出手段480にて生成される人検知データを順次処理し、人物ごとの位置変化を追跡データとして記憶部42へ記録蓄積する。追跡処理手段484は、追跡対象の人物ごとに人物IDを付与し、追跡データを作成・更新する。追跡データは、人物ID、人物の検出位置(角度、距離)、リンク情報、タイムスタンプ情報(検出時刻)が紐付けられたデータである。リンク情報は、後述のリンク処理手段486によって対応付けられた無線タグのタグID、および無線タグのタグ方位(角度)を含む。
【0035】
また追跡処理手段484は、検出された人物と前回検出された人物とを比較し、大きさや位置の差が小さいこと、或いは人物の移動距離と経過時間から導かれる移動速度が所定速度以下であること、などの判定により、両者が同一人物か否か判定する。前回人物を検出していない場合や同一人物ではない場合は、監視エリアに初めて出現した人物と認識し、この人物に人物IDを付与して当該人物IDに関する追跡データを作成する。同一人物である場合は既に追跡中の人物と判断し、当該人物に付された人物IDに関する追跡データを更新する。また追跡中の人物が一定時間継続して検出されないときには、当該人物は監視エリアから退場したとみなして追跡処理を終了する。なお、追跡データは追跡終了後も一定期間保持する。
【0036】
リンク処理手段486は、人物検出手段480により検出された位置情報とタグ検出手段482により検出された無線タグ20の位置情報とを照合して、人物と無線タグ20とを対応付けするリンク処理を行う対応判定手段として機能する。本実施形態では、リンク処理手段486は、人物検出手段480にて人物が検出されると、その人物方位と同時に検出されている無線タグ20のタグ方位とを比較し、一致度が所定の一致基準を満たしていれば、すなわち人物方位とタグ方位との角度の相違量(方位ずれ量)が所定基準未満であれば、人物と無線タグ20とを対応付ける(リンク成立)。一方、方位ずれ量が所定基準以上であり一致性が認められない場合や無線タグ20が検知されていない場合は対応付けしない(リンク失敗)。方位の一致性判定にあたり、リンク処理手段486は、検出された人物の位置が重要エリア内に含まれるか否か判定し、重要エリア内のときは重要エリア外のときより上記の一致基準を厳しく設定する。すなわち、重要エリア内の人物については、重要エリア外の人物と比べて、無線タグ20との対応付けが成立し難くなる。
【0037】
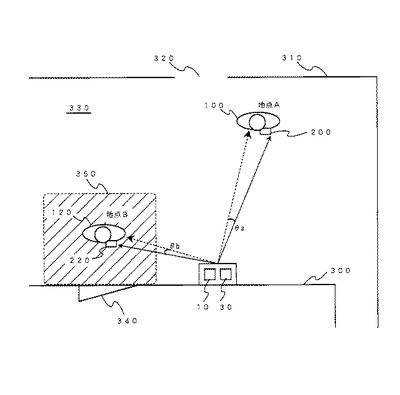
図2は、人物と無線タグとの対応関係を示す監視エリアの模式的な平面図である。図2の例では、監視対象の建物300と、敷地外との境界310及び敷地入口320とで囲まれた敷地内を監視エリア330としている。また、建物300の建物入口340付近はセキュリティレベルが高い重要エリア350に設定されている。
重要エリアではない地点Aにいる人物100については、検出された無線タグ200との方位ずれ量θaを閾値Th1と比較し、閾値Th1未満の場合に人物100と無線タグ200とを対応付ける。一方、重要エリアに属する地点Bにいる人物120については、検出された無線タグ220との方位ずれ量θbを閾値Th1より小さい値である閾値Th2と比較し、閾値Th2未満の場合に人物120と無線タグ220とを対応付ける。
【0038】
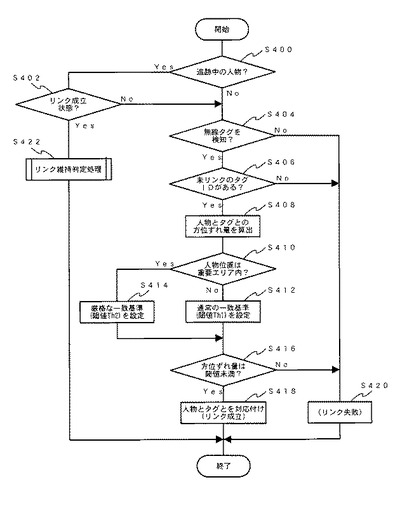
図3は、リンク処理手段におけるリンク処理を示す概略のフローチャートである。リンク処理手段486は、人物検出手段480にて人物が検出されると、検出された各人物について以下の処理を実行する。
リンク処理手段486は、処理対象の人物が既に追跡中の人物であるか新たに出現した人物であるか判定し(S400)、追跡中の人物である場合は当該人物IDについてリンク成立状態であるか、つまり無線タグと対応付けされているか否かを判定する(S402)。新たに検出された人物である場合(S400のNo)、またはリンク成立状態ではない人物の場合(S402のNo)は、当該人物IDについてリンク設定を試みる(S404〜S420)。
【0039】
まずリンク処理手段486は、無線タグを検知しているか否か(S404)、検知している場合はその無線タグが他の人物とリンク設定されていないかを判定する(S406)。検知している無線タグのタグIDが他の人物IDとリンク設定されていない場合は(S406のYes)、当該人物の人物方位と当該無線タグのタグ方位との方位ずれ量を算出する(S408)。また、当該人物の位置が重要エリアに含まれるか否か判定し(S410)、人物の場所に応じて人物と無線タグとの対応付け判定に用いる一致基準を設定する(S412及び414)。上述したように、図2の例によれば、重要エリア350外にいる人物100についての対応付け判定の際は、通常の一致基準(閾値Th1)を設定し(S412)、重要エリア350内にいる人物120についての対応付け判定の際には、厳しい一致基準(閾値Th2)を設定する(S414)。
【0040】
そして方位ずれ量が設定された閾値未満であるか否かを判定し(S416)、閾値未満であれば処理対象の人物にかかる人物IDに当該無線タグのタグIDを対応付け、これにより新たなリンクが設定される(S418)。一方、監視エリアに未リンクの無線タグが検知されていない場合(S404のNo、S406のNo)、また方位ずれ量が閾値以上であり一致性が確認されなかった場合は(S416のNo)、リンクを設定することができないか、設定することが不適切であるため、処理対象の人物に対してリンク設定せず終了する(S420)。なお、未リンクの無線タグを複数検知している場合は、方位ずれ量が最も小さい無線タグから対応付け判定を試み、リンク失敗した場合は終了する。
【0041】
リンク処理手段486は、処理対象の人物が追跡中であり、特定の無線タグとリンク成立状態の場合は(S402のYes)、リンクが存在しない場合の処理S404〜S420に代えて、リンク維持判定処理を行う(S422)。リンク維持判定処理では、処理対象の人物に対応付けられている無線タグに限定して対応付け判定する。なお、無線タグの方位検出精度が比較的誤差が大きいことに配慮し、一旦リンク設定した人物と無線タグ20の組については、リンク維持判定において一致判定の基準を緩和してリンク切れが頻繁に発生する事態を回避する。
【0042】
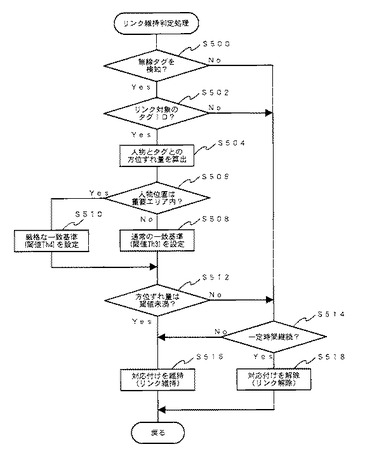
図4は、リンク処理手段におけるリンク維持判定処理を示す概略のフローチャートである。リンク処理手段486は、無線タグを検知しているか否か判定し(S500)、検知している場合、検知された無線タグのタグIDに処理対象の人物IDとリンク設定されたタグIDが含まれているか判定する(S502)。当該人物に対応付けられた無線タグが検知されている場合は、当該人物の人物方位と当該無線タグのタグ方位との方位ずれ量を算出する(S504)。また、当該人物の位置が重要エリアに含まれるか否か判定し(S506)、人物の場所に応じて人物と無線タグとの対応付け判定に用いる一致基準を設定する(S508及び510)。リンク設定処理と同様に、人物の検出位置が重要エリア350外のときの閾値Th3より重要エリア350内のときの閾値Th4を小さい値として一致基準を厳しくする。なお、リンク維持判定処理では初回のリンク設定時の一致基準より緩い基準を設定し、閾値Th3を閾値Th1より大きい値とし、同様に閾値Th4を閾値Th2より大きい値とする。
【0043】
そして方位ずれ量が設定された閾値未満であるか否かを判定し(S512)、閾値未満であれば処理対象の人物と無線タグとの間にリンクが成立すると判定し、両者の対応付けを維持する(S516)。一方、監視エリアに未リンクの無線タグが検知されていない場合(S500のNo、S502のNo)、また方位ずれ量が閾値以上であり一致性が確認されなかった場合は(S512のNo)、リンク失敗の状態が一定時間継続したか判定する(S514)。一定時間継続してリンク失敗している場合は、当該人物と対応付けられていた無線タグとのリンク設定を解除し(S518)、一定時間内の場合は一時的に対応付けできなかった可能性があるためリンク設定を維持する(S516)。
【0044】
図1に戻り、監視処理部48の異常判定手段488は、追跡データに基づいて各種の判定対象行動(イベント)を検出し、当該行動の種別に応じた判定処理を実行する。特に、人物が不審者か否かの異常判定を必要とする特定行動を検出したときは、当該人物のリンク情報を参照してその人物が無線タグを帯同しているか、すなわち正規の利用者か否かを識別し、侵入異常の判定を行う。本実施形態では、判定対象行動として、入場イベント、退場イベント、滞留イベント、入館イベント、及び退館イベントを定義する。このうち、建物への侵入行為を検出するための入館イベント、敷地内での不正行為を検出するための入場イベント及び滞留イベントを、異常判定が必要な特定行動として扱う。
【0045】
異常判定手段488は、各人物の追跡データにおける位置履歴を監視し、検出された人物の位置や追跡経過時間に基づいて判定対象行動を検出する。
[入場イベント]
新たに検出された(新規人物ID)について、出現位置が敷地外との境界(図2の境界310及び敷地入口320)である場合を入場イベントとして検出する。異常判定手段488は、入場イベントを検出すると、当該人物に無線タグが対応付けされているか判定する。無線タグ20が対応付けられていれば当該人物は正規の利用者と判定し、入場を許容する。一方、無線タグ20が対応付けられてない場合は、その人物の出現位置が敷地入口320か否か判定する。敷地入口320からの入場の場合は、客時や配達員等の訪問者である可能性あるため、当該人物IDに対して一定時間の入場許可を設定し(一時許可設定)、滞留判定タイマを起動する。敷地入口320以外の境界310からの入場の場合は、不審者による侵入と判断して外周侵入異常を確定し、報知部46による警報動作、通報部44を介した警備センタ60への異常通報動作を行う。
【0046】
[退場イベント]
追跡中の人物が監視エリアから消失し、その直前の位置が敷地外との境界(図2の境界310及び敷地入口320)である場合を退場イベントとして検出する。異常判定手段488は、退場イベントを検出すると、当該人物の追跡を終了し、一定時間後に追跡データを削除する。なお、追跡中に異常判定された人物の追跡データについては、少なくとも異常復旧されるまで保持する。
【0047】
[滞留イベント]
一時許可設定した追跡中の人物が、一定時間を超えて監視エリア内に存在している場合を滞留イベントとして検出する。異常判定手段488は、滞留判定タイマが一定時間を計時完了すると滞留イベントを検出し、当該人物に無線タグが対応付けされているか判定する。無線タグ20が対応付けられてない場合は、ピッキングや潜伏等の不正目的を有する人物である可能性が高いため、不審者として認識し外周侵入異常を確定する。
【0048】
[入館イベント]
追跡中の人物が監視エリアから消失し、その直前の位置が監視対象の建物との境界(図2の建物入口340)である場合を入館イベントとして検出する。異常判定手段488は、入館イベントを検出すると、その直前において当該人物に無線タグ20が対応付けされていたか否か判定する。無線タグ20が対応付けられていた場合は、正規利用者による入館行為と認識して追跡を終了する。一方、無線タグ20が対応付けられてない場合は、建物に不正侵入した人物であるとみなし、緊急性が高い建物侵入異常を確定する。異常判定手段488は、建物侵入異常である旨を外周侵入異常と区別して警備センタへ異常通報を行う。
上述のとおり建物入口付近は重要エリアに設定されているため、他の監視エリアに比べてリンク設定の基準が厳しい。よって、入場イベントや滞留イベントのときと比較して、入館イベントにおける利用者判定は厳格になされることになり、建物への不正侵入を確実に排除することができる。
【0049】
なお、建物入口340以外にも窓等の侵入経路がある場合は、それらも建物入口と同様に扱うのが好ましい。また、建物入口340を含む建物300との境界部分の全てを入館イベントの検出対象としてもよい。この場合、窓等の侵入経路の付近、或いは建物との境界を形成する一定幅の領域を重要エリアに設定する。
【0050】
以上のように、本実施形態の監視システムは、監視エリア内で検出した人物が存在する方位と無線タグが存在する方位との一致性に基づいて人物と無線タグとの対応付けを行う。この際、検出した人物の位置がセキュリティレベルが高い重要エリアに含まれる場合には、一致判定の基準を厳しくして利用者の資格判定を厳格化する。したがって、実際は無線タグを帯同していない不審者に対して建物侵入等の危険性が高い行為を許容してしまうことを確実に防止できる。これと共に、正規利用者による危険性が比較的低い行為に対しては誤警報してしまうことを抑制可能であり、利便性とセキュリティ性を兼ねた高品質な監視システムが提供される。
【0051】
なお、上記の実施形態では、重要エリア内外で一致基準を2段階で異ならせる構成としたが、これに限定されるものではない。例えば、3段階以上の重要度を複数エリアのそれぞれに設定し、重要度に応じて異なる一致基準を設定する構成としてもよい。
また、監視エリア内のエリア単位で一致基準を異ならせる構成に代えて、建物入口からの距離、あるいは建物との境界からの距離に応じて一致基準を動的に変化させてもよい。例えば、建物境界からの距離が近いほど一致基準を厳しくし、リンク設定され難くする。
【0052】
また、上記の実施形態では、距離変化群をなす角度範囲の中心角を人物方位に用いる構成としたが、距離変化群をなす角度範囲そのものを人物方位としてもよい。この場合、検知した無線タグのタグ方位が人物の角度範囲に含まれるか、あるいは人物の角度範囲からのずれ量が閾値未満か否かに基づいて対応付けの判定を行う。
【0053】
また、上記の実施形態では、無線タグを検知したときのリーダの指向角の中心をタグ方位に用いたが、指向角の角度範囲そのものをタグ方位としてもよい。この場合、人物方位を示す角度が無線タグを検知した指向角の角度範囲に含まれるか、あるいは指向角の角度範囲からのずれ量が閾値未満か否かに基づいて対応付けの判定を行う。
さらに、距離変化群をなす角度範囲そのものを人物方位とし、指向角の角度範囲そのものをタグ方位としてもよい。この場合は、互いの角度範囲の重複率の程度を方位ずれ量とするか、或いは重複しないのであれば最も近い端同士の方位差を方位ずれ量として用いればよい。
【0054】
また、上記の実施形態では、人物の検出方位と無線タグの検出方位との一致性を判定する構成としたが、人物の検出位置と無線タグの検出位置との一致性を判定する構成としてもよい。この場合、無線タグが存在する監視エリア内の位置を特定する必要があるため、例えば、応答信号の受信強度や、質問信号の送出から応答信号の受信までの時間差を用いて無線タグまでの距離を算出し、タグ方位と距離とから無線タグの位置を算出する。あるいは、互いに検知範囲が重複する複数のリーダ部を用い、各リーダ部における同一タグIDの無線タグの検出方位が交差する位置を求め、これを無線タグの検出位置とすることができる。なお、位置の一致性の判定によりリンク処理を行う場合は、相互間の距離を位置ずれ量とし、方位ずれ量の代わりに用いて一致性を判定する。
【0055】
また、上記の実施形態では、特定行動を検出したときの対応付けの有無によって不審者判定を行う構成としたが、対応付けの確からしさを示すリンクレベルを設定し、特定行動に応じて予め設定された基準レベルを満たしているか否かによって不審者判定を行ってもよい。リンクレベルとは、例えば、リンク成立状態の継続性や、方位ずれ量の大きさ、無線タグの方位検出精度などによって設定される。リンク成立状態が長ければ、人物がその無線タグを所持している確度は高いと云えるため、リンクレベルを高くする。同様に、方位ずれ量が小さいほど、或いは無線タグの方位検出精度が高いほど、リンクレベルを高くする。そして、特定行動のうち入場イベントや滞留イベントについては比較的低いリンクレベル以上であれば許容し、一方、入館イベントについては高いリンクレベル以上でなければ不審者として異常判定する。なお、この形態においては、場所ごとのセキュリティレベルに応じてリンクレベルの算出方式を異ならせる構成してもよい。例えば、重要エリアは他のエリアと比べて、方位ずれ量が同等であっても、リンクレベルが低く算出されるよう構成する。
【符号の説明】
【0056】
10 測距センサ、20 無線タグ、30 リーダ部、40 監視装置、42 記憶部、44 通報部、46 報知部、48 監視処理部、50 通信回線、60 警備センタ
【技術分野】
【0001】
本発明は、監視エリアにおいて移動物体を監視するシステムに関する。
【背景技術】
【0002】
従来、建物内やその周辺領域を監視エリアとし、居住者や従業員等、当該エリアの正当な利用者にICタグ等の携帯機を帯同させて監視するシステムが提案されている。例えば、監視エリアにて人物を検知したときに、当該人物が携帯機を帯同しているか否かを携帯機が発する無線信号に基づいて判定し、当該人物が正規の利用者であるか否か識別することができる。
【0003】
下記特許文献1に示される警備システムでは、警戒エリアにて熱線センサが移動物体を検知すると、従業員が所持する携帯カードの識別番号の読み取り動作を実施し、登録されている識別番号が読み取れない場合にはこの移動物体を侵入者と判断して異常警報する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−144160号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
監視エリアにて熱線センサが人物を検知したとき、単に監視エリア内にて携帯機の存在が検知されているだけでは、その人物が真に携帯機を所持しているか判断できない。つまり、人物および携帯機の検知範囲が人間一人分の広さ程度に狭ければ、検知された人物が検知された携帯機を所持していると推定し得るが、通常、建物内やその周辺領域を監視する際は広範囲の監視エリアが用いられるため、検知された人物とは別の位置に携帯機が存在している場合に当該人物が正規利用者と誤認識されてしまう。具体的には、監視エリア内に携帯機が遺失物として存在する場合や、携帯機を所持しない人物の他に携帯機を所持した正規利用者が併存する場合などが想定され、この場合には監視エリア内での人物の識別・監視が精度良くなされない可能性がある。
【0006】
本発明は上記問題点を解決するためになされたものであり、移動物体がICタグ等の携帯機を帯同しているか否かの識別・監視を的確に行える移動物体監視システムの提供を目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために本発明の移動物体監視システムは、移動物体が携帯機を帯同しているか否かを監視する移動物体監視システムであって、センシングにより監視エリアの移動物体を検出し当該移動物体の位置情報を取得する物体検出手段と、前記携帯機が発した無線信号を受信し当該携帯機の位置情報を検出する携帯機検出手段と、前記移動物体の位置情報と前記携帯機の位置情報とが所定の一致基準を満たす場合に当該移動物体と当該携帯機とを対応付けする対応判定手段と、を有し、前記対応判定手段は、前記位置情報に応じて異なる前記一致基準を用いて前記対応付けの判定を実行する、ことを特徴とする。
かかる構成によれば、監視エリア内のセキュリティレベルが高い場所ほど一致基準を厳格化して移動物体と携帯機との対応付けがなされ難くすることができ、利便性と安全性を兼ねた高品質な移動物体の識別・監視を行うことができる。
【0008】
また、上記構成において、前記対応判定手段は、少なくとも、前記移動物体と前記携帯機との位置情報の相違量が許容値未満の場合に前記一致基準を満たすと判定し、前記位置情報に応じて異なる前記許容値を用いる。
【0009】
また、上記構成において、前記監視エリアは進入規制区域の周囲に設定され、前記対応判定手段は、前記監視エリアにおける前記進入規制区域に近い場所の前記一致基準を当該進入規制区域から遠い場所より厳しくする。
また、上記構成において、前記監視エリアは進入規制区域の周囲に設定され、前記対応判定手段は、前記進入規制区域の入口に近い場所の前記一致基準を当該入口から遠い場所より厳しくする。
かかる構成によれば、進入規制区域への侵入行為の危険性が高い状況において厳格な対応付け判定を行うため、不審物体による侵入行為を確実に排除することができる。
【0010】
また、上記構成において、更に、前記移動物体の位置情報を追跡して特定行動を検出し、前記特定行動が検出された移動物体と前記携帯機との対応付けの有無に基づいて異常判定を行う異常判定手段を有する。
【発明の効果】
【0011】
本発明によれば、移動物体および携帯機の位置関係に基づき帯同判定するともに、その判定基準を場所毎のセキュリティレベルに応じて異ならせることで、利便性と安全性を兼ねた移動物体の識別・監視を行うことができる。
【図面の簡単な説明】
【0012】
【図1】本実施形態の監視システムの概略全体構成図である。
【図2】人物と無線タグとの対応関係を示す監視エリアの模式的な平面図である。
【図3】リンク処理手段におけるリンク処理を示すフローチャートである。
【図4】リンク処理手段におけるリンク維持判定処理を示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、本発明に係る移動物体監視システムの実施形態として、建物の敷地内に不正侵入した不審者を検出して異常警報する監視システムを例に説明する。
【0014】
本実施形態の監視システムは、例えば、サービス利用者の家屋の監視に適用される。家屋の敷地にあたる庭を監視エリアとし、監視エリアへの不審者の侵入を検出して異常警報を行う。利用者には予め携帯機が与えられ、家屋の出入りの際には携帯機を所持する。監視システムは、敷地外から監視エリアに入った人物を検出して、その人物に関する位置情報を得る。また、携帯機から電波を受信することで携帯機の存在を検知し、受信した無線信号を解析して携帯機に関する位置情報を得る。そして、人物に関する位置情報と携帯機に関する位置情報とを比較して、相互の位置関係が所定の一致基準を満たす場合に当該人物が当該携帯機を所持しているとみなし、正規の利用者であると認識する。一方、一致基準を満たさない場合は検出した人物は携帯機を所持しない不審者であると認識し、例えば庭内での滞留行為や建物内への入館行為に対して異常警報を出力する。
【0015】
ここで、位置情報とは監視エリアにおける人物や携帯機の所在を示す情報であり、監視エリア内での位置や方位を用いることができる。例えば、監視エリアを2次元の極座標系で表したとき、座標上の位置(角度、距離)や方位(角度)を採用し得る。本実施形態の監視システムでは、位置情報として方位を用い、方位の一致性に基づき人物が携帯機を所持しているかの帯同判定を行うものとする。
【0016】
携帯機の方位検出は、携帯機が発した電波の到来方向や受信強度を解析することで特定される。しかし、電波の到来方向や受信強度は、壁等の反射など環境要因による様々な影響を受けるため、携帯機の方位検出は特性上やむを得ない不安定さを含む。したがって、人物と携帯機との方位一致性の判定に際し、不安定さを吸収しようと緩い一致基準を用いれば不審者による侵入行為を許容してしまう可能性が生じ、一方、厳格な一致基準を用いれば正規の利用者を不審者として誤判定してしまう可能性がある。
【0017】
そこで本実施形態の監視システムでは、監視エリア内の各領域に応じた異なる一致基準を用いて、人物と携帯機との方位一致性を判定する。すなわち、監視エリアのうち、不審行為を確実に排除したいと考えるセキュリティレベルが高い場所については、他の場所より厳格な一致基準を用いる。例えばセキュリティレベルが高い場所は、監視対象である家屋に隣接する領域や、家屋の出入口や屋内への侵入経路となり得る場所の周辺領域である。
このように、場所に応じて帯同判定の基準を異ならせることで、利便性とセキュリティ性を兼ねた監視システムを実現する。
【0018】
以下、本実施形態の監視システムの具体的な構成および動作について、図面を参照して説明する。
図1は、本実施形態の監視システムの概略全体構成図である。監視システムは、主として、センサ部10、無線タグ20、リーダ部30、監視装置40を含んで構成され、建物の周囲の敷地を監視エリアとする。建物の敷地内や建物に侵入した不審者を検出すると、インターネット網などの通信回線50を介して遠隔の警備センタ60に異常発生を通報する。異常通報を受けた警備センタ60は、現地に警備員を派遣する等の緊急対処を実施する。また、監視システムに別途カメラ(図示せず)を設け、異常発生時の画像を警備センタ60で確認できるように構成しておけば、警備センタ60の監視員が現場の状況を的確に把握できる。
【0019】
センサ部10は、監視エリアにおける人物の位置情報を検出する機能を有する。本実施形態ではセンサ部10としてレーザ測距センサを用い、レーザ光により監視エリアを走査し、レーザ光を反射した物体の位置を検出する。例えば、波長890nm程度の近赤外光のレーザ光源を備え、光源からのレーザパルスを等速に回転駆動される走査鏡で反射させてその出射方向を変え、監視エリアの全域に対して順次投光する。また、センサ部10は物体にて反射されたレーザパルスを受光して、当該物体までの測距データを生成する。レーザ光の走査は、センサ部10を中心として監視エリアを望む角度範囲(例えば水平方向に180゜)に対して、所定の周期(例えば200ミリ秒)で繰り返される。そして測距は、走査角度範囲内の所定の角度ステップ(例えば0.25゜)ごとに飛行時間法(TOF法:Time of Flight)を用いて行われ、具体的には、レーザパルスの出射から受光までに要する時間を計測し、この時間と光速度とからレーザ光を反射した物体までの距離を算出する。センサ部10は、1周期分の各走査角ごとの測定距離をまとめて測距データを作成し、監視装置40へ出力する。
【0020】
センサ部10は上述したレーザ測距センサには限定されず、例えば、マイクロ波やミリ波等の電波を使用するレーダセンサや、超音波を送受信する超音波センサ(ソナーセンサ)等でも同様に構成可能である。また、画像センサを用いて、背景差分やフレーム間差分により人物を抽出し、画像上の水平方向座標から人物の方位を求め、垂直方向座標から逆透視変換により人物までの距離を推定することで測距データを生成することもできる。この場合、画像センサは斜め上方から監視エリアを撮影するよう設置される。
【0021】
無線タグ20は、建物への出入りが認められた利用者に予め与えられる携帯機であり、監視対象である建物の出入りの際に帯同される。無線タグ20は、リーダ部30との間で電波を用いた無線通信を行い、予め記憶されている無線タグ20ごとに固有の識別情報(以下、タグIDと称す)を含む無線信号を送出する。無線通信方式には、RF−ID(Radio Frequency IDentification)技術を利用する。無線タグ20の利用周波数や駆動方式は限定されるものではないが、建物の敷地内の監視用途とするため比較的長距離の通信に適したUHF帯あるいは2.4GHz帯の周波数を利用する。また、リーダ部30からの質問信号に対し、自己のバッテリを駆動源としてタグIDを含む応答信号を発信するセミアクティブ型とする。なお、無線タグ20に振動検知センサを設け、振動検知中、つまり移動中のみ無線信号を発信する方式としてもよい。
【0022】
リーダ部30は、無線タグ20が発した無線信号を受信して、所定の検知範囲に存在する無線タグ10を検知するタグリーダである。リーダ部30による検知範囲は、監視エリアと略一致させておく。リーダ部30は、監視エリアに送出した質問信号に対して無線タグ20が発した応答信号を受信し、応答信号に含まれる該無線タグ20を識別するタグIDを抽出する。
【0023】
また、リーダ部30は質問信号または応答信号に基づいて無線タグ20の位置情報を検出するための構成を有する。監視装置40は無線タグ20の位置情報として、リーダ部30から視た無線タグ20が存在する方位を検出する。そのための構成の一例として、リーダ部30は、それぞれ比較的狭いビーム幅(例えば10°)の指向性を有し、互いにビーム方向(指向角)をずらして配置された複数のアンテナを備え、それら複数のアンテナを一定時間間隔で切り替えながら質問信号の送出および応答信号の受信を行う。リーダ部30は、当該送受信が所定周期(例えば200ミリ秒)ごとに検知対象の角度範囲(例えば360°)に対して順次行われるように指向性を制御する。そして指向角ごとに無線タグ20からの応答信号の受信強度を取得し、タグIDごとに、1周期分の各方位に対する受信強度をまとめたタグ検知データを作成し、監視装置40に出力する。つまり、タグ検知データは無線タグ20ごとの受信強度の方位分布を示す。
【0024】
上述の例では指向角をビーム幅に応じたステップで変化させる構成を示したが、ビーム幅よりも細かいステップ(例えば5°ずつ)とし、隣り合うビーム間をオーバーラップさせて構成させてもよい。この場合、より小さい確度で無線タグ20の方位を検出できる。
また、アンテナの指向性を切り替え可能な他の構成を用いることもできる。例えば、或る方向に強い指向性を有する単一のアンテナを回転させて指向角を順次切り替える構成や、フェーズドアレイアンテナのように電子的制御により指向角を切り替える構成も採り得る。また、送信アンテナと受信アンテナとを別構成とし、一方だけに指向性を持たせる構成としてもよい。
【0025】
なお、後述する監視装置40でのリンク処理のために、測距データが示す位置とタグ検知データが示す方位との関係を予め定義しておく必要がある。本実施形態では、それぞれの視軸が実質的に一致するようにリーダ部30とセンサ部10を近傍に配置し、センサ部10の走査角とリーダ部30の指向角、すなわち測距データにおける角度(方位)とタグ検知データにおける角度(方位)とが共通の座標系で表現可能に予め調整される。好ましくはリーダ部30及びセンサ部10を同一の筐体内に配置する。
【0026】
また、本実施形態の監視システムでは一組の測距センサ10及びリーダ部30で構成しているが、監視対象の領域の形状に応じて複数組の測距センサ及びリーダ部を用いて構成する。例えば、建物の周囲4面を監視する場合には、少なくとも2組の測距センサ及びリーダ部を敷地内の対角に設ける。建物の壁面に設置する場合には、各面に対して計4組の測距センサ及びリーダ部を設置する。
【0027】
監視装置40は、センサ部10及びリーダ部30と無線または有線で接続され、センサ部10から送出された測距データ、リーダ部30から送出されたタグ検知データを入力して監視処理を実行し、異常検出時には遠隔の警備センタ60へ異常通報を行う。
監視装置40は、主に、記憶部42、通報部44、報知部46、監視処理部48を含んで構成される。
【0028】
記憶部42は、ROMやRAM等で構成され、監視処理部48で実行される各種プログラムやそれに必要なデータが格納される。また記憶部42は、予め利用者に付与した無線タグ20のタグIDの情報(登録タグデータ)、移動物体が存在しない状態でセンサ部10が監視エリアを走査して得た測距データ(基準測距データ)を記憶する。また、検出された人物ごとの行動(移動軌跡など)を管理する追跡データを記憶する。追跡データは監視処理部48によって随時作成、更新、削除される。
【0029】
また記憶部42は、監視エリアに関するマップ情報を記憶する。マップ情報は、監視エリア全体の領域を表す情報、及び、監視エリアのうちセキュリティレベルを他より高く設定する領域(以下、重要エリアと呼ぶ)を表す情報を含む。重要エリアは、無線タグ20を帯同しない人物の行動を強く排除したい場所が設定される。例えば、監視エリアの境界のうち監視対象の建物から一定距離内の領域や、建物の出入口付近の領域は、不審者が建物へ侵入する直前にいる場所にあたるため、他の場所よりセキュリティレベルを高くすべき重要エリアとする。重要エリアの場所や形状は上記に限らず、監視エリア内の任意の領域を設定できる。
【0030】
通報部44は、通信回線50を介して警備センタ60と通信し、異常信号等の各種データを送信するための通信インターフェースである。
報知部46は、ブザーやスピーカ、警告ランプ等で構成され、異常が発生した旨を周囲に報知したり不審者を威嚇するための手段である。なお、報知部46は監視装置40と別体にセンサ部10及びリーダ部30と併設させてもよい。
【0031】
監視処理部48は、マイクロプロセッサ等を用いて構成され、実行されるプログラムに応じて、センサ部10から入力される測距データ、及びリーダ部30から入力されるタグ検知データに基づく監視処理を行う。具体的には、監視処理部48は実行プログラムとして、人物検出手段480、タグ検出手段482、追跡処理手段484、リンク処理手段486、異常判定手段488を持つ。
【0032】
人物検出手段480は、センサ部10と共に、監視エリアにおける人物の位置情報を検出する物体検出手段を構成する。人物検出手段480は、センサ部10から入力される測距データを記憶部42の基準測距データと比較し、距離が同一物体を示している程度に同等であり、且つ、基準測距データとの距離変化が所定以上生じている走査角のまとまり(距離変化群)を抽出する。そして、距離変化群における距離及び角度範囲から把握される移動物体の大きさが人を示す程度である場合に、当該移動物体を人物として認識し、当該人物を検出した方位及び距離を人物の位置とする。具体的には、人物を示す距離変化群の角度範囲の中心角を人物の検出方位(人物方位)、その角度範囲内の距離の平均を人物までの距離とし、人検知データを生成する。測距データ中に複数の距離変化群が抽出された場合は、それぞれについて人物判定および位置の検出を行う。なお、距離変化群をなす角度範囲内の平均距離値ではなく、中心角の距離や中央値など他の代表値を人物の距離としてもよい。
【0033】
タグ検出手段482は、リーダ部30と共に、監視エリアにおける無線タグ20の位置情報を検出する携帯機検出手段を構成する。タグ検出手段482は、リーダ部30から入力される1周期分のタグ検知データを入力し、検出された各タグIDごとに、登録タグIDを参照して予め登録されたタグIDか判定する。登録されたタグIDの場合は、タグIDに関する受信強度の方位分布を解析し、最も受信強度が大きいピーク指向角を該無線タグの検出方位(タグ方位)とする。指向角には一定の角度範囲があるため、ピーク指向角の中心角度を代表してタグ方位に用いる。なお、無線タグの方位検出方法については、例えば、受信強度の方位分布のパターンを基準パターンと比較してタグ方位を求める方法や、受信強度が最大であるピーク指向角を他の方位の受信強度との関係で補正する方法など、公知の技術で代替可能である。
【0034】
追跡処理手段484は、人物検出手段480にて生成される人検知データを順次処理し、人物ごとの位置変化を追跡データとして記憶部42へ記録蓄積する。追跡処理手段484は、追跡対象の人物ごとに人物IDを付与し、追跡データを作成・更新する。追跡データは、人物ID、人物の検出位置(角度、距離)、リンク情報、タイムスタンプ情報(検出時刻)が紐付けられたデータである。リンク情報は、後述のリンク処理手段486によって対応付けられた無線タグのタグID、および無線タグのタグ方位(角度)を含む。
【0035】
また追跡処理手段484は、検出された人物と前回検出された人物とを比較し、大きさや位置の差が小さいこと、或いは人物の移動距離と経過時間から導かれる移動速度が所定速度以下であること、などの判定により、両者が同一人物か否か判定する。前回人物を検出していない場合や同一人物ではない場合は、監視エリアに初めて出現した人物と認識し、この人物に人物IDを付与して当該人物IDに関する追跡データを作成する。同一人物である場合は既に追跡中の人物と判断し、当該人物に付された人物IDに関する追跡データを更新する。また追跡中の人物が一定時間継続して検出されないときには、当該人物は監視エリアから退場したとみなして追跡処理を終了する。なお、追跡データは追跡終了後も一定期間保持する。
【0036】
リンク処理手段486は、人物検出手段480により検出された位置情報とタグ検出手段482により検出された無線タグ20の位置情報とを照合して、人物と無線タグ20とを対応付けするリンク処理を行う対応判定手段として機能する。本実施形態では、リンク処理手段486は、人物検出手段480にて人物が検出されると、その人物方位と同時に検出されている無線タグ20のタグ方位とを比較し、一致度が所定の一致基準を満たしていれば、すなわち人物方位とタグ方位との角度の相違量(方位ずれ量)が所定基準未満であれば、人物と無線タグ20とを対応付ける(リンク成立)。一方、方位ずれ量が所定基準以上であり一致性が認められない場合や無線タグ20が検知されていない場合は対応付けしない(リンク失敗)。方位の一致性判定にあたり、リンク処理手段486は、検出された人物の位置が重要エリア内に含まれるか否か判定し、重要エリア内のときは重要エリア外のときより上記の一致基準を厳しく設定する。すなわち、重要エリア内の人物については、重要エリア外の人物と比べて、無線タグ20との対応付けが成立し難くなる。
【0037】
図2は、人物と無線タグとの対応関係を示す監視エリアの模式的な平面図である。図2の例では、監視対象の建物300と、敷地外との境界310及び敷地入口320とで囲まれた敷地内を監視エリア330としている。また、建物300の建物入口340付近はセキュリティレベルが高い重要エリア350に設定されている。
重要エリアではない地点Aにいる人物100については、検出された無線タグ200との方位ずれ量θaを閾値Th1と比較し、閾値Th1未満の場合に人物100と無線タグ200とを対応付ける。一方、重要エリアに属する地点Bにいる人物120については、検出された無線タグ220との方位ずれ量θbを閾値Th1より小さい値である閾値Th2と比較し、閾値Th2未満の場合に人物120と無線タグ220とを対応付ける。
【0038】
図3は、リンク処理手段におけるリンク処理を示す概略のフローチャートである。リンク処理手段486は、人物検出手段480にて人物が検出されると、検出された各人物について以下の処理を実行する。
リンク処理手段486は、処理対象の人物が既に追跡中の人物であるか新たに出現した人物であるか判定し(S400)、追跡中の人物である場合は当該人物IDについてリンク成立状態であるか、つまり無線タグと対応付けされているか否かを判定する(S402)。新たに検出された人物である場合(S400のNo)、またはリンク成立状態ではない人物の場合(S402のNo)は、当該人物IDについてリンク設定を試みる(S404〜S420)。
【0039】
まずリンク処理手段486は、無線タグを検知しているか否か(S404)、検知している場合はその無線タグが他の人物とリンク設定されていないかを判定する(S406)。検知している無線タグのタグIDが他の人物IDとリンク設定されていない場合は(S406のYes)、当該人物の人物方位と当該無線タグのタグ方位との方位ずれ量を算出する(S408)。また、当該人物の位置が重要エリアに含まれるか否か判定し(S410)、人物の場所に応じて人物と無線タグとの対応付け判定に用いる一致基準を設定する(S412及び414)。上述したように、図2の例によれば、重要エリア350外にいる人物100についての対応付け判定の際は、通常の一致基準(閾値Th1)を設定し(S412)、重要エリア350内にいる人物120についての対応付け判定の際には、厳しい一致基準(閾値Th2)を設定する(S414)。
【0040】
そして方位ずれ量が設定された閾値未満であるか否かを判定し(S416)、閾値未満であれば処理対象の人物にかかる人物IDに当該無線タグのタグIDを対応付け、これにより新たなリンクが設定される(S418)。一方、監視エリアに未リンクの無線タグが検知されていない場合(S404のNo、S406のNo)、また方位ずれ量が閾値以上であり一致性が確認されなかった場合は(S416のNo)、リンクを設定することができないか、設定することが不適切であるため、処理対象の人物に対してリンク設定せず終了する(S420)。なお、未リンクの無線タグを複数検知している場合は、方位ずれ量が最も小さい無線タグから対応付け判定を試み、リンク失敗した場合は終了する。
【0041】
リンク処理手段486は、処理対象の人物が追跡中であり、特定の無線タグとリンク成立状態の場合は(S402のYes)、リンクが存在しない場合の処理S404〜S420に代えて、リンク維持判定処理を行う(S422)。リンク維持判定処理では、処理対象の人物に対応付けられている無線タグに限定して対応付け判定する。なお、無線タグの方位検出精度が比較的誤差が大きいことに配慮し、一旦リンク設定した人物と無線タグ20の組については、リンク維持判定において一致判定の基準を緩和してリンク切れが頻繁に発生する事態を回避する。
【0042】
図4は、リンク処理手段におけるリンク維持判定処理を示す概略のフローチャートである。リンク処理手段486は、無線タグを検知しているか否か判定し(S500)、検知している場合、検知された無線タグのタグIDに処理対象の人物IDとリンク設定されたタグIDが含まれているか判定する(S502)。当該人物に対応付けられた無線タグが検知されている場合は、当該人物の人物方位と当該無線タグのタグ方位との方位ずれ量を算出する(S504)。また、当該人物の位置が重要エリアに含まれるか否か判定し(S506)、人物の場所に応じて人物と無線タグとの対応付け判定に用いる一致基準を設定する(S508及び510)。リンク設定処理と同様に、人物の検出位置が重要エリア350外のときの閾値Th3より重要エリア350内のときの閾値Th4を小さい値として一致基準を厳しくする。なお、リンク維持判定処理では初回のリンク設定時の一致基準より緩い基準を設定し、閾値Th3を閾値Th1より大きい値とし、同様に閾値Th4を閾値Th2より大きい値とする。
【0043】
そして方位ずれ量が設定された閾値未満であるか否かを判定し(S512)、閾値未満であれば処理対象の人物と無線タグとの間にリンクが成立すると判定し、両者の対応付けを維持する(S516)。一方、監視エリアに未リンクの無線タグが検知されていない場合(S500のNo、S502のNo)、また方位ずれ量が閾値以上であり一致性が確認されなかった場合は(S512のNo)、リンク失敗の状態が一定時間継続したか判定する(S514)。一定時間継続してリンク失敗している場合は、当該人物と対応付けられていた無線タグとのリンク設定を解除し(S518)、一定時間内の場合は一時的に対応付けできなかった可能性があるためリンク設定を維持する(S516)。
【0044】
図1に戻り、監視処理部48の異常判定手段488は、追跡データに基づいて各種の判定対象行動(イベント)を検出し、当該行動の種別に応じた判定処理を実行する。特に、人物が不審者か否かの異常判定を必要とする特定行動を検出したときは、当該人物のリンク情報を参照してその人物が無線タグを帯同しているか、すなわち正規の利用者か否かを識別し、侵入異常の判定を行う。本実施形態では、判定対象行動として、入場イベント、退場イベント、滞留イベント、入館イベント、及び退館イベントを定義する。このうち、建物への侵入行為を検出するための入館イベント、敷地内での不正行為を検出するための入場イベント及び滞留イベントを、異常判定が必要な特定行動として扱う。
【0045】
異常判定手段488は、各人物の追跡データにおける位置履歴を監視し、検出された人物の位置や追跡経過時間に基づいて判定対象行動を検出する。
[入場イベント]
新たに検出された(新規人物ID)について、出現位置が敷地外との境界(図2の境界310及び敷地入口320)である場合を入場イベントとして検出する。異常判定手段488は、入場イベントを検出すると、当該人物に無線タグが対応付けされているか判定する。無線タグ20が対応付けられていれば当該人物は正規の利用者と判定し、入場を許容する。一方、無線タグ20が対応付けられてない場合は、その人物の出現位置が敷地入口320か否か判定する。敷地入口320からの入場の場合は、客時や配達員等の訪問者である可能性あるため、当該人物IDに対して一定時間の入場許可を設定し(一時許可設定)、滞留判定タイマを起動する。敷地入口320以外の境界310からの入場の場合は、不審者による侵入と判断して外周侵入異常を確定し、報知部46による警報動作、通報部44を介した警備センタ60への異常通報動作を行う。
【0046】
[退場イベント]
追跡中の人物が監視エリアから消失し、その直前の位置が敷地外との境界(図2の境界310及び敷地入口320)である場合を退場イベントとして検出する。異常判定手段488は、退場イベントを検出すると、当該人物の追跡を終了し、一定時間後に追跡データを削除する。なお、追跡中に異常判定された人物の追跡データについては、少なくとも異常復旧されるまで保持する。
【0047】
[滞留イベント]
一時許可設定した追跡中の人物が、一定時間を超えて監視エリア内に存在している場合を滞留イベントとして検出する。異常判定手段488は、滞留判定タイマが一定時間を計時完了すると滞留イベントを検出し、当該人物に無線タグが対応付けされているか判定する。無線タグ20が対応付けられてない場合は、ピッキングや潜伏等の不正目的を有する人物である可能性が高いため、不審者として認識し外周侵入異常を確定する。
【0048】
[入館イベント]
追跡中の人物が監視エリアから消失し、その直前の位置が監視対象の建物との境界(図2の建物入口340)である場合を入館イベントとして検出する。異常判定手段488は、入館イベントを検出すると、その直前において当該人物に無線タグ20が対応付けされていたか否か判定する。無線タグ20が対応付けられていた場合は、正規利用者による入館行為と認識して追跡を終了する。一方、無線タグ20が対応付けられてない場合は、建物に不正侵入した人物であるとみなし、緊急性が高い建物侵入異常を確定する。異常判定手段488は、建物侵入異常である旨を外周侵入異常と区別して警備センタへ異常通報を行う。
上述のとおり建物入口付近は重要エリアに設定されているため、他の監視エリアに比べてリンク設定の基準が厳しい。よって、入場イベントや滞留イベントのときと比較して、入館イベントにおける利用者判定は厳格になされることになり、建物への不正侵入を確実に排除することができる。
【0049】
なお、建物入口340以外にも窓等の侵入経路がある場合は、それらも建物入口と同様に扱うのが好ましい。また、建物入口340を含む建物300との境界部分の全てを入館イベントの検出対象としてもよい。この場合、窓等の侵入経路の付近、或いは建物との境界を形成する一定幅の領域を重要エリアに設定する。
【0050】
以上のように、本実施形態の監視システムは、監視エリア内で検出した人物が存在する方位と無線タグが存在する方位との一致性に基づいて人物と無線タグとの対応付けを行う。この際、検出した人物の位置がセキュリティレベルが高い重要エリアに含まれる場合には、一致判定の基準を厳しくして利用者の資格判定を厳格化する。したがって、実際は無線タグを帯同していない不審者に対して建物侵入等の危険性が高い行為を許容してしまうことを確実に防止できる。これと共に、正規利用者による危険性が比較的低い行為に対しては誤警報してしまうことを抑制可能であり、利便性とセキュリティ性を兼ねた高品質な監視システムが提供される。
【0051】
なお、上記の実施形態では、重要エリア内外で一致基準を2段階で異ならせる構成としたが、これに限定されるものではない。例えば、3段階以上の重要度を複数エリアのそれぞれに設定し、重要度に応じて異なる一致基準を設定する構成としてもよい。
また、監視エリア内のエリア単位で一致基準を異ならせる構成に代えて、建物入口からの距離、あるいは建物との境界からの距離に応じて一致基準を動的に変化させてもよい。例えば、建物境界からの距離が近いほど一致基準を厳しくし、リンク設定され難くする。
【0052】
また、上記の実施形態では、距離変化群をなす角度範囲の中心角を人物方位に用いる構成としたが、距離変化群をなす角度範囲そのものを人物方位としてもよい。この場合、検知した無線タグのタグ方位が人物の角度範囲に含まれるか、あるいは人物の角度範囲からのずれ量が閾値未満か否かに基づいて対応付けの判定を行う。
【0053】
また、上記の実施形態では、無線タグを検知したときのリーダの指向角の中心をタグ方位に用いたが、指向角の角度範囲そのものをタグ方位としてもよい。この場合、人物方位を示す角度が無線タグを検知した指向角の角度範囲に含まれるか、あるいは指向角の角度範囲からのずれ量が閾値未満か否かに基づいて対応付けの判定を行う。
さらに、距離変化群をなす角度範囲そのものを人物方位とし、指向角の角度範囲そのものをタグ方位としてもよい。この場合は、互いの角度範囲の重複率の程度を方位ずれ量とするか、或いは重複しないのであれば最も近い端同士の方位差を方位ずれ量として用いればよい。
【0054】
また、上記の実施形態では、人物の検出方位と無線タグの検出方位との一致性を判定する構成としたが、人物の検出位置と無線タグの検出位置との一致性を判定する構成としてもよい。この場合、無線タグが存在する監視エリア内の位置を特定する必要があるため、例えば、応答信号の受信強度や、質問信号の送出から応答信号の受信までの時間差を用いて無線タグまでの距離を算出し、タグ方位と距離とから無線タグの位置を算出する。あるいは、互いに検知範囲が重複する複数のリーダ部を用い、各リーダ部における同一タグIDの無線タグの検出方位が交差する位置を求め、これを無線タグの検出位置とすることができる。なお、位置の一致性の判定によりリンク処理を行う場合は、相互間の距離を位置ずれ量とし、方位ずれ量の代わりに用いて一致性を判定する。
【0055】
また、上記の実施形態では、特定行動を検出したときの対応付けの有無によって不審者判定を行う構成としたが、対応付けの確からしさを示すリンクレベルを設定し、特定行動に応じて予め設定された基準レベルを満たしているか否かによって不審者判定を行ってもよい。リンクレベルとは、例えば、リンク成立状態の継続性や、方位ずれ量の大きさ、無線タグの方位検出精度などによって設定される。リンク成立状態が長ければ、人物がその無線タグを所持している確度は高いと云えるため、リンクレベルを高くする。同様に、方位ずれ量が小さいほど、或いは無線タグの方位検出精度が高いほど、リンクレベルを高くする。そして、特定行動のうち入場イベントや滞留イベントについては比較的低いリンクレベル以上であれば許容し、一方、入館イベントについては高いリンクレベル以上でなければ不審者として異常判定する。なお、この形態においては、場所ごとのセキュリティレベルに応じてリンクレベルの算出方式を異ならせる構成してもよい。例えば、重要エリアは他のエリアと比べて、方位ずれ量が同等であっても、リンクレベルが低く算出されるよう構成する。
【符号の説明】
【0056】
10 測距センサ、20 無線タグ、30 リーダ部、40 監視装置、42 記憶部、44 通報部、46 報知部、48 監視処理部、50 通信回線、60 警備センタ
【特許請求の範囲】
【請求項1】
移動物体が携帯機を帯同しているか否かを監視する移動物体監視システムであって、
センシングにより監視エリアの移動物体を検出し当該移動物体の位置情報を取得する物体検出手段と、
前記携帯機が発した無線信号を受信し当該携帯機の位置情報を検出する携帯機検出手段と、
前記移動物体の位置情報と前記携帯機の位置情報とが所定の一致基準を満たす場合に当該移動物体と当該携帯機とを対応付けする対応判定手段と、を有し、
前記対応判定手段は、前記位置情報に応じて異なる前記一致基準を用いて前記対応付けの判定を実行する、ことを特徴とした移動物体監視システム。
【請求項2】
前記対応判定手段は、少なくとも、前記移動物体と前記携帯機との位置情報の相違量が許容値未満の場合に前記一致基準を満たすと判定し、前記位置情報に応じて異なる前記許容値を用いる、請求項1に記載の移動物体監視システム。
【請求項3】
前記監視エリアは進入規制区域の周囲に設定され、
前記対応判定手段は、前記監視エリアにおける前記進入規制区域に近い場所の前記一致基準を当該進入規制区域から遠い場所より厳しくする、請求項1又は2に記載の移動物体監視システム。
【請求項4】
前記監視エリアは進入規制区域の周囲に設定され、
前記対応判定手段は、前記進入規制区域の入口に近い場所の前記一致基準を当該入口から遠い場所より厳しくする、請求項1又は2に記載の移動物体監視システム。
【請求項5】
更に、前記移動物体の位置情報を追跡して特定行動を検出し、前記特定行動が検出された移動物体と前記携帯機との対応付けの有無に基づいて異常判定を行う異常判定手段を有する、請求項1乃至4の何れかに記載の移動物体監視システム。
【請求項1】
移動物体が携帯機を帯同しているか否かを監視する移動物体監視システムであって、
センシングにより監視エリアの移動物体を検出し当該移動物体の位置情報を取得する物体検出手段と、
前記携帯機が発した無線信号を受信し当該携帯機の位置情報を検出する携帯機検出手段と、
前記移動物体の位置情報と前記携帯機の位置情報とが所定の一致基準を満たす場合に当該移動物体と当該携帯機とを対応付けする対応判定手段と、を有し、
前記対応判定手段は、前記位置情報に応じて異なる前記一致基準を用いて前記対応付けの判定を実行する、ことを特徴とした移動物体監視システム。
【請求項2】
前記対応判定手段は、少なくとも、前記移動物体と前記携帯機との位置情報の相違量が許容値未満の場合に前記一致基準を満たすと判定し、前記位置情報に応じて異なる前記許容値を用いる、請求項1に記載の移動物体監視システム。
【請求項3】
前記監視エリアは進入規制区域の周囲に設定され、
前記対応判定手段は、前記監視エリアにおける前記進入規制区域に近い場所の前記一致基準を当該進入規制区域から遠い場所より厳しくする、請求項1又は2に記載の移動物体監視システム。
【請求項4】
前記監視エリアは進入規制区域の周囲に設定され、
前記対応判定手段は、前記進入規制区域の入口に近い場所の前記一致基準を当該入口から遠い場所より厳しくする、請求項1又は2に記載の移動物体監視システム。
【請求項5】
更に、前記移動物体の位置情報を追跡して特定行動を検出し、前記特定行動が検出された移動物体と前記携帯機との対応付けの有無に基づいて異常判定を行う異常判定手段を有する、請求項1乃至4の何れかに記載の移動物体監視システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−114348(P2013−114348A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−258103(P2011−258103)
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000108085)セコム株式会社 (596)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000108085)セコム株式会社 (596)
【Fターム(参考)】
[ Back to top ]