
移動玩具
【課題】安価で且つ変化に富む遊びができる移動玩具を提供すること。
【解決手段】動力源を有しない第1の移動体10に、動力源31、及び、この動力源31の動力によって駆動される駆動輪33を有する第2の移動体30を搭載して固定することによって、第2の移動体30の動力源31を利用して、第1の移動体10を移動させるようにすることで、安価で且つ変化に富む遊びができる移動玩具を実現した。
【解決手段】動力源を有しない第1の移動体10に、動力源31、及び、この動力源31の動力によって駆動される駆動輪33を有する第2の移動体30を搭載して固定することによって、第2の移動体30の動力源31を利用して、第1の移動体10を移動させるようにすることで、安価で且つ変化に富む遊びができる移動玩具を実現した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は移動玩具に関するものである。
【背景技術】
【0002】
従来、移動体として、動力源を有さず車輪等の移動要素を有する自動車玩具および鉄道車両玩具等の手押し式のものが知られている。
また、移動体として、動力源を有するものが知られている。この移動体は、車輪や脚等の移動要素と、この移動要素を駆動させるためのモータやゼンマイばね等の動力源とを備え、動力源の動力によって移動要素を駆動させて走行するように構成されている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−37633号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
手押し式の移動体は、動力源を持たない分、安価である。しかし、手押し式の移動体は、人が手を添えない限り移動しないため、操作が面倒であるという問題がある。
一方、動力源を有する移動体は、人が手を添えなくても移動する。この動力源を有する移動体は、手押し式の移動体に比べて、操作は簡単であるが、動力源を必要とするため、1台当たりの値段が高くなるという問題がある。
なお、移動体を用いる遊びにおいて、2つの移動体を同時に使用することは難しく、遊びに変化を持たせようとする場合には、使用する移動体を取り替えて遊ぶ他はなく、この場合には、多くの種類の移動体を用意しておく必要がある。
【0005】
本発明は、変化に富む遊びができる安価な移動玩具を提供することを目的としている。
【課題を解決するための手段】
【0006】
請求項1の発明は、
車輪又は脚を有する第1の移動体と、
動力源、及び、この動力源の動力によって駆動される駆動輪を有する第2の移動体と、を備え、
前記第1の移動体には、
前記第2の移動体を搭載するための搭載部と、
前記搭載部に搭載された前記第2の移動体を固定する固定手段と、
この固定手段によって固定された前記第2の移動体の駆動輪に係合し当該駆動輪の回転によって回転駆動される入力用回転体と、この入力用回転体から入力された動力を当該第1の移動体の車輪又は脚に伝達する動力伝達機構と、
が設けられていることを特徴とする移動玩具である。
【0007】
請求項2の発明は、
車輪又は脚を有する第1の移動体と、
動力源、及び、この動力源の動力によって駆動される駆動輪を有する第2の移動体と、を備え、
前記第1の移動体には、
前記第2の移動体を搭載するための搭載部と、前記搭載部に搭載された前記第2の移動体を固定する固定手段と、
この固定手段によって固定された前記第2の移動体の駆動輪と一体的に回転する出力用回転体に係合し当該出力用回転体の回転によって回転駆動される入力用回転体と、
この入力用回転体から入力された動力を当該第1の移動体の車輪又は脚に伝達する動力伝達機構と、
が設けられていることを特徴とする移動玩具である。
【0008】
請求項3の発明は、請求項2に記載の移動玩具であって、前記出力用回転体および前記出力用回転体は互いに噛合する歯車で構成されていることを特徴とする。
【0009】
請求項4の発明は、請求項1から3いずれか一項に記載の移動玩具であって、
前記固定手段は、
前記第2の移動体のフロアパネルに所定の間隔で形成された第1の穴および第2の穴と、
前記第1の移動体に形成された台部、第1の突起および第2の突起とから構成され、
前記第1の突起は弾性変形可能な弾性片の先端部に形成され、
前記第2の突起には、前記第1の突起に向けて突出する爪部が形成され、
前記第2の移動体のフロアパネルの下面に前記突起が当接されて前記弾性片が弾性変形し且つ前記第2の移動体のフロアパネルの下面が前記台部に当接している状態で、前記第2の突起が前記第2の穴に挿入可能となっており、
前記第2の突起を前記第2の穴に挿入した位置から前記爪部の突出方向とは反対側に向けて前記第2の移動体を移動させた場合に、前記第1の突起が弾性復元力で前記第1の穴に嵌合されるとともに前記第2の突起の爪部が当該第2の穴の縁に係止されるように構成されていることを特徴とする。
【発明の効果】
【0010】
本発明によれば、第2の移動体は単独でも移動可能であり、それ自身では移動できない第1の移動体に第2の移動体を載せた際には、第2の移動体の動力源が第1の移動体の動力源としても機能するので、第2の移動体の搭載が、あたかも、第1の移動体に生命力又は活力を与えたようなイメージが醸し出されることになる。
したがって、安価で且つ変化に富む遊びができる移動玩具が実現できることになる。
【図面の簡単な説明】
【0011】
【図1】本発明に係る移動玩具の一実施の形態を示した斜視図である。
【図2】図1に示した移動玩具の第1の移動体の分解斜視図である。
【図3】図1に示した移動玩具の各動力伝達機構を模式的に示した機構図である。
【図4】図1に示した移動玩具の第1の固定手段を示した図である。
【図5】図1に示した移動玩具において、第2の移動体を第1の移動体に第1の固定手段で固定した状態を示した斜視図である。
【図6】図1に示した移動玩具において、第2の移動体を第1の移動体に第2の固定手段で固定した状態を示した斜視図である。
【発明を実施するための形態】
【0012】
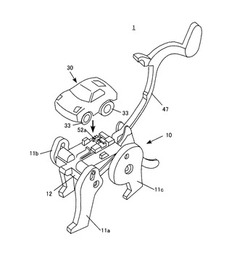
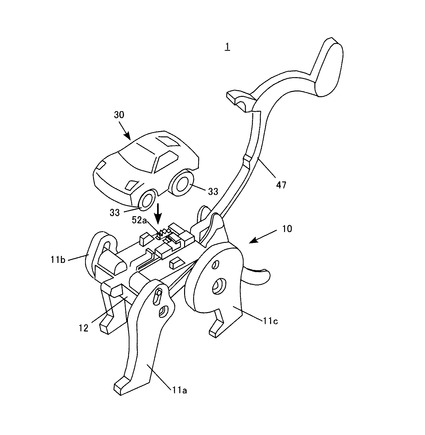
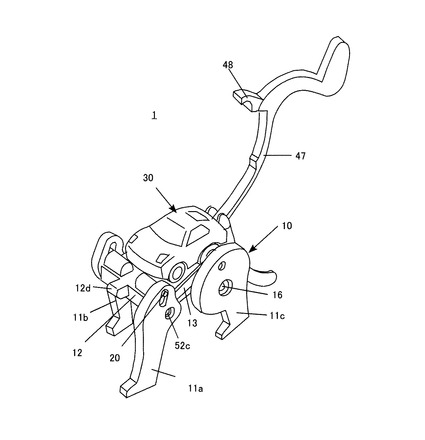
図1は、実施形態の移動玩具を示した斜視図である。
この移動玩具1は第1の移動体10および第2の移動体30を備えている。
第1の移動体10は、移動要素である前脚11a,11bおよび後脚11c,11dを有するが、動力源を有していない。一方、第2の移動体30は、移動要素である4つの車輪33およびモータ(動力源)31を有している。
ここで、第1の移動体10には搭載部が設けられ、この搭載部には第2の移動体30が搭載可能となっている。
そして、この移動玩具1は、第2の移動体30を第1の移動体10に搭載した場合、第2の移動体30の動力伝達機構Bと、第1の移動体10の動力伝達機構Aとが互いに係合され、これによって、第2の移動体30のモータ31と、第1の移動体10の前脚11a,11bおよび後脚11c,11dとが連結され、該モータ31の動力によって、該前脚11a,11bおよび後脚11c,11dが駆動されて第1の移動体10が移動するようになっている。
次に、第2の移動体30および第1の移動体10をこの順に詳しく説明する。
【0013】
まず、第2の移動体30について説明する。
この第2の移動体30は自動車玩具として構成されている。この第2の移動体30は、上述したように4つの車輪33を有している。
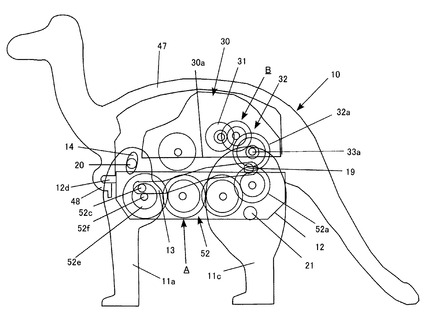
この第2の移動体30は、図3に示すように、モータ31と、このモータ31の動力を後輪軸33aに伝達するための歯車列32とを有している。そして、この第2の移動体30は、モータ31の動力を歯車列32および後輪軸33aを介して後側の車輪33に伝達することによって、走行(移動)することができるようになっている。つまり、この第2の移動体30の後側の車輪33は駆動輪となっている。
また、この第2の移動体30の後輪軸33aには、図3に示すように、第2の移動体30の動力を第1の移動体10に伝達するための出力歯車(出力用回転体)32aが設けられている。この出力歯車32aの一部は移動体30のフロアパネル30aから下方に突出している。なお、この実施形態では、出力歯車32aは、後側の車輪33と別体となっていて、後輪軸33aに固定して設けられているが、後側の車輪33と一体となっていてもよい。
この第2の移動体30においては、歯車列32と出力歯車32aとによって、第2の移動体30の動力を第1の移動体10に伝達するための動力伝達機構Bが構成されている。
なお、第2の移動体30のフロアパネル30aの前部および後部には、図4に示すように、矩形の穴41,42が形成されている。この穴41,42は後述の第1の固定手段40Aの一部を構成している。
【0014】
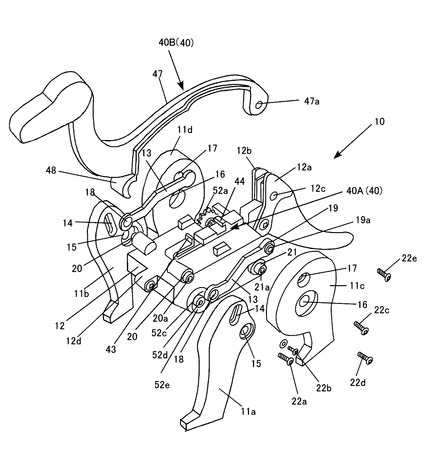
続いて、第1の移動体10について説明する。
この第1の移動体10は、図3に示すように、4足歩行の動物玩具またはロボット玩具の形状を有している。この第1の移動体10は、上述したように、前脚11a,11bおよび後脚11c,11dを有している。
前脚11a,11bは、胴部本体を形成する箱状のケーシング12の前部両側に設置され、一方、後脚11c,11dは、ケーシング12の後部両側に設置されている。そして、前脚11a,11bと後脚11c,11dとはリンク13によって互いに連結されている。
【0015】
すなわち、前脚11a,11bの上部には上下方向(長手方向)に長孔14が形成されている。また、前脚11a,11bの上部には、長孔14の下方で、且つ、該長孔14の延長線よりも後方の位置に、円形の孔15が形成されている。一方、後脚11c,11dの上部には、円形の孔16が形成され、その上方にも円形の孔17が形成されている。また、リンク13の前端部には円形の孔18が形成され、後端部に筒状の軸19が形成されている。
また、ケーシング12の前部には、幅方向外方に向けて突出する円形の軸20および偏心軸52cが設けられている。左右の偏心軸52cは、該偏心軸52cが付設された回転体52eの中心に位置する軸52f(図3参照)によって相互に連結されており、左右で位相が180度ずれるようにして設けられている。
一方、ケーシング12の後部には、幅方向外方へ突出する円形の軸21が設けられている。
そして、前脚11a,11bは、偏心軸52cにリンク13の孔18および前脚11a,11bの孔15をこの順に嵌合させ、該偏心軸52cの先端の雌ねじ52dに雄ねじ22aを螺合させるとともに、軸20に前脚11a,11bの長孔14を嵌合させ、軸20の先端の雌ねじ20aに雄ねじ22bを螺合させることで、ケーシング12に取り付けられている。一方、後脚11c,11dは、リンク13の軸19に後脚11c,11dの孔17を嵌合させ、軸19の先端の雌ねじ19aに雄ねじ22cを螺合させるとともに、ケーシング12の軸21を後脚11c,11dの孔16に嵌合させ、軸21の先端の雌ねじ21aに雄ねじ22dを螺合させることで、ケーシング12に取り付けられている。
【0016】
また、第1の移動体10には、図3に示すように、第2の移動体30からの動力を前脚11a,11bおよび後脚11c,11dに伝達するための動力伝達機構Aが設けられている。この動力伝達機構Aは、ケーシング12内に配置された歯車列52と、上記偏心軸52cと、リンク13とを備えている。動力伝達機構Aの入力端に位置する入力歯車(入力用回転体)52aの一部はケーシング12の後部上面から突出して設けられている。この入力歯車52aは、第2の移動体30の出力歯車32aと噛合可能に構成されている。
【0017】
次に、第2の移動体30を第1の移動体10に固定するための固定手段40について説明する。
この固定手段40は、第2の移動体30を固定するための第1の固定手段40Aおよび第2の固定手段40Bから構成されている。このうち第1の固定手段40Aは、第1の移動体10の搭載部に第2の移動体30を位置決め固定するためのものである。一方、第2の固定手段40Bは、第1の移動体10の搭載部に第2の移動体30を固定するものである。このように第1の固定手段40Aの他に、第2の固定手段40Bを設けたのは、第2の移動体30の固定を確実にするためである。どちらか一方のみでも第1の移動体10の搭載部の所定位置に第2の移動体30を固定できるのであれば、他方の固定手段を省略することが可能である。
【0018】
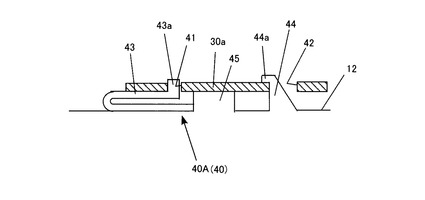
まず、第1の固定手段40Aについて説明すれば、この第1の固定手段40Aは、図4に示すように、第2の移動体30のフロアパネル30aに形成された第1の穴41および第2の穴42と、ケーシング12の搭載部に形成された第1の突起43および第2の突起44と、搭載部における第1の突起43と第2の突起44との間に設けられた台部45とによって構成されている。
台部45は、搭載部に第2の移動体30を搭載する際に当該第2の移動体30のフロアパネル30aの下面が当接する部分である。
また、第1の突起43は、第2の移動体30のフロアパネル30aの下面が台部45に当接した状態で、第2の移動体30の第1の穴41に嵌合可能となっている。この突起43は、U字状の弾性片46の先端部に形成されている。
一方、第2の突起44は、第2の移動体30のフロアパネル30aの下面が台部45に当接した状態で、第2の移動体30の第2の穴42に挿入可能となっている。この第2の突起44には、第1の突起43に向けて突出する爪部44aが形成されている。
そして、第2の突起44は、第2の移動体30のフロアパネル30aの下面に第1の突起43が当接されて弾性片46が弾性変形し且つ第2の移動体30のフロアパネル30aの下面が台部45に当接している状態で、第2の穴42に挿入される。
また、第1の突起43は、第2の移動体30のフロアパネル30aの下面が台部45に当接している状態を保ったまま、第2の突起44を第2の穴42に挿入した位置から、爪部44aの突出方向とは反対側に向けて第2の移動体30を移動させた場合、弾性片46の弾性復元力で第1の穴41に嵌合される。これと同時に、第2の突起44の爪部44aは、第2の穴42の縁に係止される。これによって、第2の移動体30は第1の移動体10に対して固定される。
【0019】
一方、第2の固定手段40Bは、第2の移動体30をケーシング12に固定保持するためのアーチ状部分を備える保持体47を備えている。この保持体47のアーチ状部分は動物玩具又はロボット玩具の背部外郭の形状を有している。また、アーチ状部分の前側部分は動物玩具またはロボット玩具の首部及び頭部の形状を有している。この保持体47の後端部には孔47aが形成されている。一方、ケーシング12の後端部には、2枚のブラケット12a,12bが平行に設けられ、片方のブラケット12aには、ねじ孔12cが形成され、他方のブラケット12bには、雌ねじ(図示せず)が形成されている。
そして、保持体47は、後端部をブラケット12a,12b間に挿入した状態で、ねじ孔12cおよび孔47aに雄ねじ22eを挿通させ、その雄ねじ22eの先端をブラケット12bの雌ねじに螺合させることによって、ブラケット12a,12bに取り付けられている。この保持体47は、第1の移動体10の幅方向に延在する雄ねじ22eを軸として回動可能となっている。
【0020】
保持体47の中間部には係合部であるフック48が形成されている。一方、ケーシング12の前端面には、他の係合部である突起12dが前方に向けて突出して設けられている。
そして、保持体47のフック48は、この突起12dに弾性的に係合されるようになっている。
【0021】
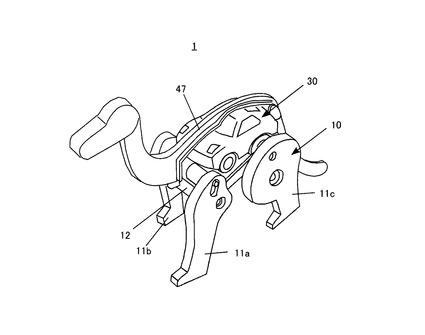
次に、この移動玩具1の動作を説明する。
図5および図6に示すようにして、第2の移動体30を固定手段40によって第1の移動体10の搭載部に固定すると、第2の移動体30の出力歯車32aが第1の移動体の入力歯車52aに噛合する。この状態で、モータ31が駆動されると、モータ31の動力は、動力伝達機構A,Bを介して回転軸52fに伝達され、偏心軸52cが回転させられる。この偏心軸52cが回転させられると、前脚11a,11bと、この前脚11a,11bにリンク13を介して連結された後脚11c,11dとが駆動されて第1の移動体10が歩行動作を行うことになる。
【0022】
上記のように構成された移動玩具1によれば、それ自身では移動できない第1の移動体10に第2の移動体30を載せた際には、第2の移動体30のモータ31が第1の移動体10の動力源としても機能し、このモータ31の動力によって、第1の移動体10が移動することになる。したがって、第2の移動体30の搭載が、あたかも、第1の移動体10に生命力又は活力を与えたようなイメージが醸し出されることになる。
【0023】
以上、本発明の実施形態について説明したが、本発明は、かかる実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々の変形が可能であることは言うまでもない。
【0024】
例えば、上記実施形態では、移動要素として脚や車輪の場合を挙げたが、移動要素はキャタピラ等であってもよい。「移動要素」とは、移動体に備えられ、接地面との間に作用する摩擦によって移動体を移動させる要素を言う。
【0025】
また、上記実施形態では、出力用回転体として出力歯車32aを、入力用回転体として入力歯車52aを例に挙げたが、出力用回転体および入力用回転体が共にローラであってもよい。さらに、第2の移動体30の駆動輪と第1の移動体1のローラとを係合させて駆動輪の回転動力をローラに伝達するようにしてもよい。
【0026】
また、上記実施形態として、動力源がモータ31の場合を挙げたが、動力源はゼンマイばねであってもよい。この場合、ゼンマイばねはハンドルを回転させることによって蓄圧されるものであっても、プルバックによって蓄圧されるものであってもよい。
【0027】
また、上記実施形態のモータ31は、第2の移動体30に設けられたスイッチによって駆動されるものであっても、コントローラによる遠隔操作によって駆動されるものであってもよい。
【0028】
また、第1の移動体10および第2の移動体30としては、自動車玩具、動物玩具又はロボット玩具の他、単体の種々の移動玩具が適用可能である。
【符号の説明】
【0029】
1 移動玩具
10 第1の移動体
11a,11b 前脚
11c,11d 後脚
30 第2の移動体
31 モータ
32a 出力歯車
40 固定手段
52a 入力歯車
50 動力伝達手段
50a,50b 動力伝達部
51 出力歯車
A,B 動力伝達機構
【技術分野】
【0001】
本発明は移動玩具に関するものである。
【背景技術】
【0002】
従来、移動体として、動力源を有さず車輪等の移動要素を有する自動車玩具および鉄道車両玩具等の手押し式のものが知られている。
また、移動体として、動力源を有するものが知られている。この移動体は、車輪や脚等の移動要素と、この移動要素を駆動させるためのモータやゼンマイばね等の動力源とを備え、動力源の動力によって移動要素を駆動させて走行するように構成されている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−37633号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
手押し式の移動体は、動力源を持たない分、安価である。しかし、手押し式の移動体は、人が手を添えない限り移動しないため、操作が面倒であるという問題がある。
一方、動力源を有する移動体は、人が手を添えなくても移動する。この動力源を有する移動体は、手押し式の移動体に比べて、操作は簡単であるが、動力源を必要とするため、1台当たりの値段が高くなるという問題がある。
なお、移動体を用いる遊びにおいて、2つの移動体を同時に使用することは難しく、遊びに変化を持たせようとする場合には、使用する移動体を取り替えて遊ぶ他はなく、この場合には、多くの種類の移動体を用意しておく必要がある。
【0005】
本発明は、変化に富む遊びができる安価な移動玩具を提供することを目的としている。
【課題を解決するための手段】
【0006】
請求項1の発明は、
車輪又は脚を有する第1の移動体と、
動力源、及び、この動力源の動力によって駆動される駆動輪を有する第2の移動体と、を備え、
前記第1の移動体には、
前記第2の移動体を搭載するための搭載部と、
前記搭載部に搭載された前記第2の移動体を固定する固定手段と、
この固定手段によって固定された前記第2の移動体の駆動輪に係合し当該駆動輪の回転によって回転駆動される入力用回転体と、この入力用回転体から入力された動力を当該第1の移動体の車輪又は脚に伝達する動力伝達機構と、
が設けられていることを特徴とする移動玩具である。
【0007】
請求項2の発明は、
車輪又は脚を有する第1の移動体と、
動力源、及び、この動力源の動力によって駆動される駆動輪を有する第2の移動体と、を備え、
前記第1の移動体には、
前記第2の移動体を搭載するための搭載部と、前記搭載部に搭載された前記第2の移動体を固定する固定手段と、
この固定手段によって固定された前記第2の移動体の駆動輪と一体的に回転する出力用回転体に係合し当該出力用回転体の回転によって回転駆動される入力用回転体と、
この入力用回転体から入力された動力を当該第1の移動体の車輪又は脚に伝達する動力伝達機構と、
が設けられていることを特徴とする移動玩具である。
【0008】
請求項3の発明は、請求項2に記載の移動玩具であって、前記出力用回転体および前記出力用回転体は互いに噛合する歯車で構成されていることを特徴とする。
【0009】
請求項4の発明は、請求項1から3いずれか一項に記載の移動玩具であって、
前記固定手段は、
前記第2の移動体のフロアパネルに所定の間隔で形成された第1の穴および第2の穴と、
前記第1の移動体に形成された台部、第1の突起および第2の突起とから構成され、
前記第1の突起は弾性変形可能な弾性片の先端部に形成され、
前記第2の突起には、前記第1の突起に向けて突出する爪部が形成され、
前記第2の移動体のフロアパネルの下面に前記突起が当接されて前記弾性片が弾性変形し且つ前記第2の移動体のフロアパネルの下面が前記台部に当接している状態で、前記第2の突起が前記第2の穴に挿入可能となっており、
前記第2の突起を前記第2の穴に挿入した位置から前記爪部の突出方向とは反対側に向けて前記第2の移動体を移動させた場合に、前記第1の突起が弾性復元力で前記第1の穴に嵌合されるとともに前記第2の突起の爪部が当該第2の穴の縁に係止されるように構成されていることを特徴とする。
【発明の効果】
【0010】
本発明によれば、第2の移動体は単独でも移動可能であり、それ自身では移動できない第1の移動体に第2の移動体を載せた際には、第2の移動体の動力源が第1の移動体の動力源としても機能するので、第2の移動体の搭載が、あたかも、第1の移動体に生命力又は活力を与えたようなイメージが醸し出されることになる。
したがって、安価で且つ変化に富む遊びができる移動玩具が実現できることになる。
【図面の簡単な説明】
【0011】
【図1】本発明に係る移動玩具の一実施の形態を示した斜視図である。
【図2】図1に示した移動玩具の第1の移動体の分解斜視図である。
【図3】図1に示した移動玩具の各動力伝達機構を模式的に示した機構図である。
【図4】図1に示した移動玩具の第1の固定手段を示した図である。
【図5】図1に示した移動玩具において、第2の移動体を第1の移動体に第1の固定手段で固定した状態を示した斜視図である。
【図6】図1に示した移動玩具において、第2の移動体を第1の移動体に第2の固定手段で固定した状態を示した斜視図である。
【発明を実施するための形態】
【0012】
図1は、実施形態の移動玩具を示した斜視図である。
この移動玩具1は第1の移動体10および第2の移動体30を備えている。
第1の移動体10は、移動要素である前脚11a,11bおよび後脚11c,11dを有するが、動力源を有していない。一方、第2の移動体30は、移動要素である4つの車輪33およびモータ(動力源)31を有している。
ここで、第1の移動体10には搭載部が設けられ、この搭載部には第2の移動体30が搭載可能となっている。
そして、この移動玩具1は、第2の移動体30を第1の移動体10に搭載した場合、第2の移動体30の動力伝達機構Bと、第1の移動体10の動力伝達機構Aとが互いに係合され、これによって、第2の移動体30のモータ31と、第1の移動体10の前脚11a,11bおよび後脚11c,11dとが連結され、該モータ31の動力によって、該前脚11a,11bおよび後脚11c,11dが駆動されて第1の移動体10が移動するようになっている。
次に、第2の移動体30および第1の移動体10をこの順に詳しく説明する。
【0013】
まず、第2の移動体30について説明する。
この第2の移動体30は自動車玩具として構成されている。この第2の移動体30は、上述したように4つの車輪33を有している。
この第2の移動体30は、図3に示すように、モータ31と、このモータ31の動力を後輪軸33aに伝達するための歯車列32とを有している。そして、この第2の移動体30は、モータ31の動力を歯車列32および後輪軸33aを介して後側の車輪33に伝達することによって、走行(移動)することができるようになっている。つまり、この第2の移動体30の後側の車輪33は駆動輪となっている。
また、この第2の移動体30の後輪軸33aには、図3に示すように、第2の移動体30の動力を第1の移動体10に伝達するための出力歯車(出力用回転体)32aが設けられている。この出力歯車32aの一部は移動体30のフロアパネル30aから下方に突出している。なお、この実施形態では、出力歯車32aは、後側の車輪33と別体となっていて、後輪軸33aに固定して設けられているが、後側の車輪33と一体となっていてもよい。
この第2の移動体30においては、歯車列32と出力歯車32aとによって、第2の移動体30の動力を第1の移動体10に伝達するための動力伝達機構Bが構成されている。
なお、第2の移動体30のフロアパネル30aの前部および後部には、図4に示すように、矩形の穴41,42が形成されている。この穴41,42は後述の第1の固定手段40Aの一部を構成している。
【0014】
続いて、第1の移動体10について説明する。
この第1の移動体10は、図3に示すように、4足歩行の動物玩具またはロボット玩具の形状を有している。この第1の移動体10は、上述したように、前脚11a,11bおよび後脚11c,11dを有している。
前脚11a,11bは、胴部本体を形成する箱状のケーシング12の前部両側に設置され、一方、後脚11c,11dは、ケーシング12の後部両側に設置されている。そして、前脚11a,11bと後脚11c,11dとはリンク13によって互いに連結されている。
【0015】
すなわち、前脚11a,11bの上部には上下方向(長手方向)に長孔14が形成されている。また、前脚11a,11bの上部には、長孔14の下方で、且つ、該長孔14の延長線よりも後方の位置に、円形の孔15が形成されている。一方、後脚11c,11dの上部には、円形の孔16が形成され、その上方にも円形の孔17が形成されている。また、リンク13の前端部には円形の孔18が形成され、後端部に筒状の軸19が形成されている。
また、ケーシング12の前部には、幅方向外方に向けて突出する円形の軸20および偏心軸52cが設けられている。左右の偏心軸52cは、該偏心軸52cが付設された回転体52eの中心に位置する軸52f(図3参照)によって相互に連結されており、左右で位相が180度ずれるようにして設けられている。
一方、ケーシング12の後部には、幅方向外方へ突出する円形の軸21が設けられている。
そして、前脚11a,11bは、偏心軸52cにリンク13の孔18および前脚11a,11bの孔15をこの順に嵌合させ、該偏心軸52cの先端の雌ねじ52dに雄ねじ22aを螺合させるとともに、軸20に前脚11a,11bの長孔14を嵌合させ、軸20の先端の雌ねじ20aに雄ねじ22bを螺合させることで、ケーシング12に取り付けられている。一方、後脚11c,11dは、リンク13の軸19に後脚11c,11dの孔17を嵌合させ、軸19の先端の雌ねじ19aに雄ねじ22cを螺合させるとともに、ケーシング12の軸21を後脚11c,11dの孔16に嵌合させ、軸21の先端の雌ねじ21aに雄ねじ22dを螺合させることで、ケーシング12に取り付けられている。
【0016】
また、第1の移動体10には、図3に示すように、第2の移動体30からの動力を前脚11a,11bおよび後脚11c,11dに伝達するための動力伝達機構Aが設けられている。この動力伝達機構Aは、ケーシング12内に配置された歯車列52と、上記偏心軸52cと、リンク13とを備えている。動力伝達機構Aの入力端に位置する入力歯車(入力用回転体)52aの一部はケーシング12の後部上面から突出して設けられている。この入力歯車52aは、第2の移動体30の出力歯車32aと噛合可能に構成されている。
【0017】
次に、第2の移動体30を第1の移動体10に固定するための固定手段40について説明する。
この固定手段40は、第2の移動体30を固定するための第1の固定手段40Aおよび第2の固定手段40Bから構成されている。このうち第1の固定手段40Aは、第1の移動体10の搭載部に第2の移動体30を位置決め固定するためのものである。一方、第2の固定手段40Bは、第1の移動体10の搭載部に第2の移動体30を固定するものである。このように第1の固定手段40Aの他に、第2の固定手段40Bを設けたのは、第2の移動体30の固定を確実にするためである。どちらか一方のみでも第1の移動体10の搭載部の所定位置に第2の移動体30を固定できるのであれば、他方の固定手段を省略することが可能である。
【0018】
まず、第1の固定手段40Aについて説明すれば、この第1の固定手段40Aは、図4に示すように、第2の移動体30のフロアパネル30aに形成された第1の穴41および第2の穴42と、ケーシング12の搭載部に形成された第1の突起43および第2の突起44と、搭載部における第1の突起43と第2の突起44との間に設けられた台部45とによって構成されている。
台部45は、搭載部に第2の移動体30を搭載する際に当該第2の移動体30のフロアパネル30aの下面が当接する部分である。
また、第1の突起43は、第2の移動体30のフロアパネル30aの下面が台部45に当接した状態で、第2の移動体30の第1の穴41に嵌合可能となっている。この突起43は、U字状の弾性片46の先端部に形成されている。
一方、第2の突起44は、第2の移動体30のフロアパネル30aの下面が台部45に当接した状態で、第2の移動体30の第2の穴42に挿入可能となっている。この第2の突起44には、第1の突起43に向けて突出する爪部44aが形成されている。
そして、第2の突起44は、第2の移動体30のフロアパネル30aの下面に第1の突起43が当接されて弾性片46が弾性変形し且つ第2の移動体30のフロアパネル30aの下面が台部45に当接している状態で、第2の穴42に挿入される。
また、第1の突起43は、第2の移動体30のフロアパネル30aの下面が台部45に当接している状態を保ったまま、第2の突起44を第2の穴42に挿入した位置から、爪部44aの突出方向とは反対側に向けて第2の移動体30を移動させた場合、弾性片46の弾性復元力で第1の穴41に嵌合される。これと同時に、第2の突起44の爪部44aは、第2の穴42の縁に係止される。これによって、第2の移動体30は第1の移動体10に対して固定される。
【0019】
一方、第2の固定手段40Bは、第2の移動体30をケーシング12に固定保持するためのアーチ状部分を備える保持体47を備えている。この保持体47のアーチ状部分は動物玩具又はロボット玩具の背部外郭の形状を有している。また、アーチ状部分の前側部分は動物玩具またはロボット玩具の首部及び頭部の形状を有している。この保持体47の後端部には孔47aが形成されている。一方、ケーシング12の後端部には、2枚のブラケット12a,12bが平行に設けられ、片方のブラケット12aには、ねじ孔12cが形成され、他方のブラケット12bには、雌ねじ(図示せず)が形成されている。
そして、保持体47は、後端部をブラケット12a,12b間に挿入した状態で、ねじ孔12cおよび孔47aに雄ねじ22eを挿通させ、その雄ねじ22eの先端をブラケット12bの雌ねじに螺合させることによって、ブラケット12a,12bに取り付けられている。この保持体47は、第1の移動体10の幅方向に延在する雄ねじ22eを軸として回動可能となっている。
【0020】
保持体47の中間部には係合部であるフック48が形成されている。一方、ケーシング12の前端面には、他の係合部である突起12dが前方に向けて突出して設けられている。
そして、保持体47のフック48は、この突起12dに弾性的に係合されるようになっている。
【0021】
次に、この移動玩具1の動作を説明する。
図5および図6に示すようにして、第2の移動体30を固定手段40によって第1の移動体10の搭載部に固定すると、第2の移動体30の出力歯車32aが第1の移動体の入力歯車52aに噛合する。この状態で、モータ31が駆動されると、モータ31の動力は、動力伝達機構A,Bを介して回転軸52fに伝達され、偏心軸52cが回転させられる。この偏心軸52cが回転させられると、前脚11a,11bと、この前脚11a,11bにリンク13を介して連結された後脚11c,11dとが駆動されて第1の移動体10が歩行動作を行うことになる。
【0022】
上記のように構成された移動玩具1によれば、それ自身では移動できない第1の移動体10に第2の移動体30を載せた際には、第2の移動体30のモータ31が第1の移動体10の動力源としても機能し、このモータ31の動力によって、第1の移動体10が移動することになる。したがって、第2の移動体30の搭載が、あたかも、第1の移動体10に生命力又は活力を与えたようなイメージが醸し出されることになる。
【0023】
以上、本発明の実施形態について説明したが、本発明は、かかる実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々の変形が可能であることは言うまでもない。
【0024】
例えば、上記実施形態では、移動要素として脚や車輪の場合を挙げたが、移動要素はキャタピラ等であってもよい。「移動要素」とは、移動体に備えられ、接地面との間に作用する摩擦によって移動体を移動させる要素を言う。
【0025】
また、上記実施形態では、出力用回転体として出力歯車32aを、入力用回転体として入力歯車52aを例に挙げたが、出力用回転体および入力用回転体が共にローラであってもよい。さらに、第2の移動体30の駆動輪と第1の移動体1のローラとを係合させて駆動輪の回転動力をローラに伝達するようにしてもよい。
【0026】
また、上記実施形態として、動力源がモータ31の場合を挙げたが、動力源はゼンマイばねであってもよい。この場合、ゼンマイばねはハンドルを回転させることによって蓄圧されるものであっても、プルバックによって蓄圧されるものであってもよい。
【0027】
また、上記実施形態のモータ31は、第2の移動体30に設けられたスイッチによって駆動されるものであっても、コントローラによる遠隔操作によって駆動されるものであってもよい。
【0028】
また、第1の移動体10および第2の移動体30としては、自動車玩具、動物玩具又はロボット玩具の他、単体の種々の移動玩具が適用可能である。
【符号の説明】
【0029】
1 移動玩具
10 第1の移動体
11a,11b 前脚
11c,11d 後脚
30 第2の移動体
31 モータ
32a 出力歯車
40 固定手段
52a 入力歯車
50 動力伝達手段
50a,50b 動力伝達部
51 出力歯車
A,B 動力伝達機構
【特許請求の範囲】
【請求項1】
車輪又は脚を有する第1の移動体と、
動力源、及び、この動力源の動力によって駆動される駆動輪を有する第2の移動体と、を備え、
前記第1の移動体には、前記第2の移動体を搭載するための搭載部と、前記搭載部に搭載された前記第2の移動体を固定する固定手段と、この固定手段によって固定された前記第2の移動体の駆動輪に係合し当該駆動輪の回転によって回転駆動される入力用回転体と、この入力用回転体から入力された動力を当該第1の移動体の車輪又は脚に伝達する動力伝達機構と、が設けられていることを特徴とする移動玩具。
【請求項2】
車輪又は脚を有する第1の移動体と、
動力源、及び、この動力源の動力によって駆動される駆動輪を有する第2の移動体と、を備え、
前記第1の移動体には、前記第2の移動体を搭載するための搭載部と、前記搭載部に搭載された前記第2の移動体を固定する固定手段と、この固定手段によって固定された前記第2の移動体の駆動輪と一体的に回転する出力用回転体に係合し当該出力用回転体の回転によって回転駆動される入力用回転体と、この入力用回転体から入力された動力を当該第1の移動体の車輪又は脚に伝達する動力伝達機構と、が設けられていることを特徴とする移動玩具。
【請求項3】
前記出力用回転体および前記出力用回転体は互いに噛合する歯車で構成されていることを特徴とする請求項2に記載の移動玩具。
【請求項4】
前記固定手段は、
前記第2の移動体のフロアパネルに所定の間隔で形成された第1の穴および第2の穴と、
前記第1の移動体に形成された台部、第1の突起および第2の突起とから構成され、
前記第1の突起は弾性変形可能な弾性片の先端部に形成され、
前記第2の突起には、前記第1の突起に向けて突出する爪部が形成され、
前記第2の移動体のフロアパネルの下面に前記突起が当接されて前記弾性片が弾性変形し且つ前記第2の移動体のフロアパネルの下面が前記台部に当接している状態で、前記第2の突起が前記第2の穴に挿入可能となっており、
前記第2の突起を前記第2の穴に挿入した位置から前記爪部の突出方向とは反対側に向けて前記第2の移動体を移動させた場合に、前記第1の突起が弾性復元力で前記第1の穴に嵌合されるとともに前記第2の突起の爪部が当該第2の穴の縁に係止されるように構成されていることを特徴とする請求項1から3いずれか一項に記載の移動玩具。
【請求項1】
車輪又は脚を有する第1の移動体と、
動力源、及び、この動力源の動力によって駆動される駆動輪を有する第2の移動体と、を備え、
前記第1の移動体には、前記第2の移動体を搭載するための搭載部と、前記搭載部に搭載された前記第2の移動体を固定する固定手段と、この固定手段によって固定された前記第2の移動体の駆動輪に係合し当該駆動輪の回転によって回転駆動される入力用回転体と、この入力用回転体から入力された動力を当該第1の移動体の車輪又は脚に伝達する動力伝達機構と、が設けられていることを特徴とする移動玩具。
【請求項2】
車輪又は脚を有する第1の移動体と、
動力源、及び、この動力源の動力によって駆動される駆動輪を有する第2の移動体と、を備え、
前記第1の移動体には、前記第2の移動体を搭載するための搭載部と、前記搭載部に搭載された前記第2の移動体を固定する固定手段と、この固定手段によって固定された前記第2の移動体の駆動輪と一体的に回転する出力用回転体に係合し当該出力用回転体の回転によって回転駆動される入力用回転体と、この入力用回転体から入力された動力を当該第1の移動体の車輪又は脚に伝達する動力伝達機構と、が設けられていることを特徴とする移動玩具。
【請求項3】
前記出力用回転体および前記出力用回転体は互いに噛合する歯車で構成されていることを特徴とする請求項2に記載の移動玩具。
【請求項4】
前記固定手段は、
前記第2の移動体のフロアパネルに所定の間隔で形成された第1の穴および第2の穴と、
前記第1の移動体に形成された台部、第1の突起および第2の突起とから構成され、
前記第1の突起は弾性変形可能な弾性片の先端部に形成され、
前記第2の突起には、前記第1の突起に向けて突出する爪部が形成され、
前記第2の移動体のフロアパネルの下面に前記突起が当接されて前記弾性片が弾性変形し且つ前記第2の移動体のフロアパネルの下面が前記台部に当接している状態で、前記第2の突起が前記第2の穴に挿入可能となっており、
前記第2の突起を前記第2の穴に挿入した位置から前記爪部の突出方向とは反対側に向けて前記第2の移動体を移動させた場合に、前記第1の突起が弾性復元力で前記第1の穴に嵌合されるとともに前記第2の突起の爪部が当該第2の穴の縁に係止されるように構成されていることを特徴とする請求項1から3いずれか一項に記載の移動玩具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−147885(P2012−147885A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2011−7767(P2011−7767)
【出願日】平成23年1月18日(2011.1.18)
【出願人】(000003584)株式会社タカラトミー (248)
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願日】平成23年1月18日(2011.1.18)
【出願人】(000003584)株式会社タカラトミー (248)
【Fターム(参考)】
[ Back to top ]