
移動目標における射撃点を検出する方法、および装置
【課題】実移動目標における射撃点を検出する方法を提供する。
【解決手段】目標の少なくとも一部を覆うことができる仕上げ面を定めるための第1の式を記録するステップ54と、軽量型武器より発射した発射体またはビームの軌跡、あるいはこの軌跡を中心とする筒状体を定めるための第2の式を記録するステップ52と、電子センサーで目標点の座標を測定するステップ62と、第2の記録された式、および第1の記録された式を用いて、表面および発射体、またはビームの軌跡の間、あるいは表面の間に、交点を検索するステップ64と、少なくとも1つの交点を検出した場合、衝突点の存在を指示するステップ68、およびその逆の場合、射撃点の非存在を指示するステップ66とを備える。
【解決手段】目標の少なくとも一部を覆うことができる仕上げ面を定めるための第1の式を記録するステップ54と、軽量型武器より発射した発射体またはビームの軌跡、あるいはこの軌跡を中心とする筒状体を定めるための第2の式を記録するステップ52と、電子センサーで目標点の座標を測定するステップ62と、第2の記録された式、および第1の記録された式を用いて、表面および発射体、またはビームの軌跡の間、あるいは表面の間に、交点を検索するステップ64と、少なくとも1つの交点を検出した場合、衝突点の存在を指示するステップ68、およびその逆の場合、射撃点の非存在を指示するステップ66とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、軽量型武器により移動目標を発射する発射体、またはビームの射撃点を検出する方法、移動目標を保護する方法、および実移動目標への発射をシミュレーションする方法に関する。さらに、本発明は、これらの方法を実施するためのデータ記録媒体、武器、およびこの方法を実施するための装置を対象とする。
【背景技術】
【0002】
目標に射撃点を検出する方法は、人の身体を保護するため、また銃撃シミュレーションゲームなど、多用途に実施されている。
【0003】
例えば、特許文献1には、射手における射撃点を知る方法が記載されている。この特許文献においては、射手は電磁波の全方位性送波器を備え、武器には、この電磁波の指向性センサーが装備されている。指向性センサーの測定軸は、武器の銃身の軸と一致している。そのため、指向性センサーが送波器より送波した電波を検出すると、射手は銃身の軸線上に位置しているため、射手は、発射による打撃を受けるおそれがあるということを意味している。詳しく述べると、指向性センサーは、全方位性エミッタが検出円錐の範囲内にあると、射手における射撃点を検出する。この検出円錐の頂点は、武器とは区別することができず、その回転軸は、武器の視線と区別することはできない。この検出円錐の断面は、武器が指す方向から離れる方向へ移動するのに伴って、徐々に大となる。
【0004】
しかし、この方法によると、射手は射撃点を誤検出するか、またはその逆に、射撃点を検出することができず、そのため、発射するために引金を引くと、弾丸が射手に当たってしまう恐れもある。
【0005】
例えば、射手が武器から遠く離れている場合、検出コーンの断面積は、射手が占めている実際の横断面積より、遥かに大きい。そのため、射手は、射撃点を誤って検出する恐れがある。
【0006】
逆に、もし射手が武器の極く近くにいる場合、射手の身体の一部が、武器の銃身の上に被さり、かつ全方位性送波器が、検出円錐の範囲外にある可能性もある。このような場合には、射撃点は検出されていないので、至近距離からの発射によって、射手が傷害を受ける可能性もある。
【0007】
先行技術文献としては、次のものを挙げることができる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】フランス国特許出願第2790547号
【特許文献2】米国特許第4218834B号
【特許文献3】欧州特許第1688697A1号
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明の目的は、武器の近くある移動目標における射撃点を、効果的に検出方法を提供することである。従って、本発明は、請求項1に記載の第1実施形態、および請求項4に記載の第2実施形態を対象としている。
【0010】
本発明の方法において、目標に関連する寸法は、この目標と武器と距離と必ずしも関連しているわけではない。また、レーザ光線を用いて、武器の周辺の環境をスイープする位置センサーとは違って、UWBにより変調した電波または磁界を使用するので、目標が武器の近くにあっても、目標点を精密に突き止めることができる。従って、目標が武器の近くにあっても、射撃点を確実に検出できる。特に、この方法によると、目標に対する至近距離発射を、確実に検出することができる。
【0011】
電磁波または磁界を使用するので、電波または磁界を透す対象物により、目標の一部が隠されていても、目標の位置を正確に求めることができる。そのため、位置センサーにおける目標に支持されている部分を、目標である人の服装の下方に簡単に隠すことができ、これによって、本発明の方法を実施していることが分かり難くなる。
【0012】
また、目標が遠くにある場合における射撃点の誤検出は少ない。
【0013】
さらに、本発明の方法によると、発射するために引金を引く前に、射撃点を検出することができる。
【0014】
最後に、この方法によると、発射体またはビームの軌跡の全長にわたって、射撃点を検出することができる。そのため、この方法は、直線発射、および弾道軌跡の発射の両方に適用することができる。なお「直線発射」とは、目標に対して直線的に発射するという意味であり、重力効果は無視できる。逆に、「弾道発射」とは、重力の影響により、目標に対して放物線の軌跡を描いて発射するという意味である。
【0015】
本発明の検出方法の実施形態においては、従属請求項に記載する特徴の1つ以上を備えることができる。
【0016】
また、本発明の検出方法の実施態様は、次のような利点を有する。
‐目標に対する方向を測定することにより、正確に表面SCを認識することができる。
‐武器に対して自由度の無いようにリンクした座標系を用いているので、視線の方向を測定しなくてもよい。
‐目標に自由度の無いようにリンクした座標系を用いているので、目標の位置を測定しなくてもよい。
【0017】
さらに、本発明は、請求項7に記載されているように、発射に対して実移動目標を保護する方法をも対象としている。
【0018】
また、本発明は、指示を電子コンピュターにより実行する際に、上記の方法の1つを実行するための指示を有するデータ記録媒体を対象としている。
【0019】
さらに、本発明は、上記の方法を実施するための武器を対象としている。
【0020】
最後に、本発明は、上記の方法を実施するための目標装置を対象としている。
【図面の簡単な説明】
【0021】
図を参照しながら、非限定的な実施例に関する、以下の説明を読むことにより、本発明を明確に把握できると思う。
【図1】武装システムの概略図である。
【図2】図1のシステムに適用される目標保護装置の第1実施形態の概略図である。
【図3】図1のシステムに適用される目標を保護する方法のフローチャートである。
【図4】目標保護装置の第2実施形態の概略図である。
【図5】図4の装置により移動目標を保護する方法を示すフローチャートである。
【図6】目標保護装置の第3実施形態の略図である。
【図7】図6の装置で目標を保護する方法のフローチャートである。
【図8】発射シミュレータの略図である。
【図9】図8のシミュレータを操作する方法を示す略図である。
【発明を実施するための形態】
【0022】
各図において、同じ符号は同じ要素を示す。
【0023】
以下の説明において、当業者に公知の特徴や機能については、詳しく記載しない。
【0024】
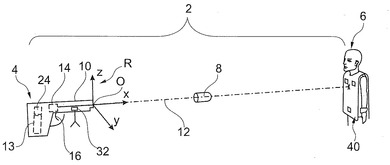
図1は、移動目標6へ発射体またはビームを発射しうる武器4を備える武装システム2を示す。
【0025】
発射体またはビームが、目標に打撃を与える点を「射撃点」と呼ぶこととする。この実施形態において、目標は人であり、発射体またはビームは、この人を射撃点で負傷させることを意図している。発射体である場合には、皮膚をこの発射体が射撃することにより、傷害が起こさせる。ビームがレーザー光線である場合には、傷害の原因の最も多くは射撃による火傷である。
【0026】
武器4は、軽量型であり、人が片手または両手で把持して使用できるように、十分に軽量であり、典型的には、回転式拳銃のような短銃、またはライフルのような長銃である。
【0027】
これ以降、武器4が、拳銃および長銃である特別なケースについて述べる。発射体は直径Dの弾丸8である。
【0028】
武器4は、
−発射線12に沿う銃身10と、
−1つ以上の弾丸8が入っている弾倉13と、
−銃身10内の弾丸8を、亜音速で推進させて爆発させるために、爆発用混合物を発射しうる発射機構14と、
−射手が手で引いて発射させるためのレバー16
とを備えている。
【0029】
発射線12は、弾丸8が発射される方向を向いている。また、その方向は、弾丸8が発射された方向でもある。
【0030】
発射機構14は、爆発を起こすため、爆発用混合物に必要なエネルギーを与えるために、放電を発生させることができるものである。
【0031】
この場合、レバー16は、武器4に取付けられている人間−機械インターフェースであり、
−発射のための引金を引かない休止位置と、
−発射のために直ちに引金を引くように発射機構14に発射コマンドを伝達する押込位置との間を、
手で移動させることができるようになっている。
【0032】
通常、レバーは、これらの2つ位置の間を、射手の指で移動させることができるようになっている機械的部材である。
【0033】
この武装システム2には、武器4からの発射に対して目標6を保護するための保護装置が設けられている。この保護装置は、図2に符号20をもって詳しく示してある。図2においては、図を簡単にするため、武器4は、破線四角で示してある。
【0034】
保護装置20は、
−目標6における衝突点を検出する機器と、
−射手がレバー16を引いても、発射しないようにする発射抑制機構24とを備えている。
【0035】
この場合、射撃点を検出するための装置は、
−武器4の座標系R(図1に示す)における目標6の点Aの位置のセンサーと、
−メモリ28と、
−データ記録媒体に記録させた指示、即ちこの場合には、メモリ28を実行できる、プログラム可能なコンピュター30とを備えている。
【0036】
座標系Rは、互いに直交する3つの軸X,軸Y,軸Zにより定められている。軸Xは、発射線12と区別することはできず、目標の方向を向いている。座標系Rにおいて、弾丸8の軌跡は、予め分かっている。この場合、軌跡は一定であり、座標系Rの軸Xに相当する。従って、これらの3つ軸が交差する原点Oは、武器4の銃身の端末に、自由度の無いように固定されている。
【0037】
メモリ28は、コンピュター30により図3の方法を実行するのに必要な指示およびデータを含んでいる。
【0038】
位置センサーは、座標系Rにおける点Aの座標xA,yA,zAを測定する。この実施形態においては、位置センサーは、
−武器4に自由度無く固定されているエミッターレシーバ32と、
−目標6が着用するベスト40を、自由度無く固定した、少なくとも4つの反射板34〜37とを備えている。
【0039】
エミッターレシーバ32は、UWB(Ultra Wideband:超広帯域無線)技術により変調した電波を送受する。この送受波器は、走行時間を計算する計算モジュール42を備えている。この計算モジュール42は、この送波器から送った電波が、エミッタ32と各反射板34〜37との間の距離を移動する時間を測定する。次に、この計算モジュール42は、送波した電波の既知の伝搬速度を基づいて、距離diに換算した走行時間を変換する。ただし、指数iは、電波が反射された反射板を示す。これにより、計算モジュール42は、4つの距離d1〜d4を測定する。距離d1〜d4は、それぞれ反射板34〜37に対応している。次に、この計算モジュール42は、距離diを、点Aの座標に変換する。座標が測定される点Aは、例えば、各反射板に関連付けられている均等に重み付けで計算した反射板34〜37の重心である。
【0040】
反射板34〜37は、送った電波をエミッターレシーバ32に向かって反射する。目標の位置姿勢の決定に関する曖昧さを防止するため、これら3つの反射板34〜36は、1つの同一面上に配置され、4つ目の反射板は、この平面の範囲外に配置されている。好ましくは、同じ平面上にある反射板は、少なくとも20cmまたは40cmの間隔で離れている。この場合、これらの反射板34〜37は、目標6が着用するベスト40に自由度の無いように固定されている。例えば、目標6がこのベストを着用している際、1つの反射板34,35は、それぞれの肩に配置され、他の反射板36は、腹に配置され、最後に反射板37は、背中の中央に配置される。
【0041】
コンピュター30のコマンドにより、発射を抑制するための発射抑制機構24を、アクティブ状態とパッシィブ状態の間を切り替えることができる。アクティブ状態では、発射するための引金を引くことが抑制される。パッシブ状態では、レバー16を押すことにより、発射するための引金を引くことができる。
【0042】
例えば、この発射抑制機構24は、抑制コマンドに応じて、押込位置へのレバー16の移動を機械的に防止するか、あるいは、レバー16が押込位置であっても、発射するための引金を引けないように、発射機構14により放電の発生を抑制する。
【0043】
図2に示すように、メモリ28、コンピュター30およびエミッターレシーバ32は、武器4に固定されている。より正確には、メモリ28、コンピュター30およびエミッターレシーバ32は、武器4に設けられた筺体の内部に収容され、手やペンチで外し難い覆蓋が施されている。この覆蓋は、標準型ねじドライバの先端に合わないねじ頭を有するねじにより閉じられているのが好ましい。
【0044】
次に、保護装置20の操作について、図3を参照して、さらに詳しく説明する。
【0045】
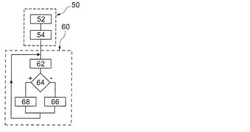
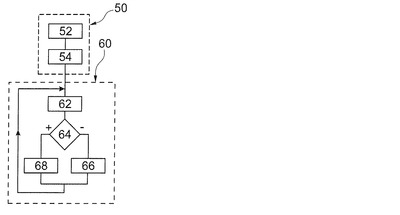
この操作では、初期化段階50から開始される。この段階50は、発射線12に沿って銃身10の端末から無限に伸びる筒状SDの方程式をメモリ28に記録するステップ52から開始される。ここで、シリンダーSDは、半径rpの回転筒状である。半径rpはD/2およびβ*D/2の間であり、ただし、Dは弾丸8の直径であり、βは、厳密に1以上であり、かつ100,10、または3以下の定数である。例えば、この場合、半径rpは1cm以上10cm以下であり、5cmである。例えば、座標系Rにおける筒状SDの方程式は、次のようになる。
(1) y2+z2=rp2 および、x≧0
【0046】
ステップ54中に、表面SCを定める式が、メモリ28に記録される。表面SCは、点Aとともに、メモリ28に関連付けられている。より正確には、座標系Rにおけるこの表面SCの位置は、点Aの位置である。この場合、この表面SCは、点Aを包含する領域を定める。また、この実施形態において、目標6の領域の大部分を包含している。例えば、表面SCは、半径rcの点Aを中心とする球状である。この実施形態においては、半径rcは、50cm以上、または1m以上である。
【0047】
表面SCの式は、点Aから測定した座標xA,yA,zAの函数である値と置換されるためパラメータを含んでいる。この場合、これらのパラメータは、それぞれ座標xA,yA,zAと等しい。従って、これらには、xA,yA,zAの印が付けられている。表面SCは、点Aと武器4を離れた距離より独立しているのが好ましい。例えば、表面SCの方程式は、次の通りである:
(2) (x−xA)2 +(y−yA)2 +(z−zA)2 =rc2
【0048】
また、この初期化段階中には、表面SCを定める半径rcも、メモリ28に記録される。
【0049】
保護装置20は、一旦初期化されたら、次の利用段階60へ進むことが可能になる。ステップ62では、位置センサーは、座標系Rにおいて点Aの座標xA,yA,zAを継続的に測定する。これを行うため、エミッターレシーバ32は、反射板34〜37により反射された電波を送る。計算モジュール42は、エミッターレシーバ32及びこれらの反射板34〜37の間の走行時間を測定し、そこから、距離d1〜d4を推定する。これらの距離d1からd4に基づいて、計算モジュール42は、座標系Rにおける点Aの座標xA,yA,zAを計算する。
【0050】
ステップ64中において、コンピュター30は、位置センサーにより測定した座標を取得し、次に、表面SDおよび表面SCの間に、少なくとも1つの交点があるか否かを調べる。これを行うため、ステップ62では、コンピュター30は、方程式(2)のパラメータxA,yA,zAを、これらのパラメータの測定値で置換し、これにより、所望の方程式が得られる。
【0051】
次に、コンピュター30は、座標xA,yA,zAで構成した式(1)と方程式(2)を組み合わせた式に解決法を求める。この式は、交差点において、1点、無数の点、あるいは点がないことを検出することができる。
【0052】
交点において、点がないことを検出した場合、ステップ66中において、コンピュター30は、パッシィブ状態に切り替えさせられて、発射抑制機構24を制御する。これにより、武器4は、目標6以外のあらゆる対象物に対して使用可能のままとなる。
【0053】
一方、表面SDおよび表面SCの間に、少なくとも1つの交点が検出された場合、ステップ68では、コンピュター30は、アクティブ状態に直ちに切り替えさせるため発射抑制機構24を制御する。これにより、武器4が目標6を指すとき、この武器4より目標6へ向かって発射しても、引金を引くことは不可能となる。従って、目標は効果的に保護されることとなる。
【0054】
このような保護装置は、例えば、警備員が武器を奪われて、その武器を警備員に対して使用されることを防止するには、特に効果的である。
【0055】
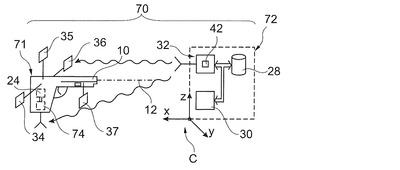
図4は、武器71から発射した発射に対して、目標6を保護するための保護装置70を示す。この保護装置70は、次の点を除いて、保護装置20と同様である。
−コンピュター30、エミッタ32、及びメモリ28は、目標6に設けた筺体72内に配置されている。
−4つの反射板34〜37は、自由度の無いようにして武器4に固定されている。
【0056】
ここで、反射板34〜36は、発射線12に対して直交する平面内に固定され、反射板37は、武器が指した方向に、この平面の前方に配置されている。
【0057】
また、武器71は、発射抑制機構24に接続されたエミッターレシーバ74を備えている。
【0058】
この実施形態において、反射板34〜37およびエミッターレシーバ32の組み合わせは、筺体72に対して自由度の無い座標系Cにおいて、武器71の座標、および発射線12の方向のセンサーを形成している。4つ反射板が使用されているので、武器71が指す方向は測定される。
【0059】
保護装置70の操作を、図5の方法を参照して、さらに詳しく説明する。図5の方法は、初期化段階80から開始される。この段階80は、初期化段階50と同様の段階であり、2つのステップ82およびステップ84を備えている。ステップ82は、記録されたシリンダーSDの方程式が発射線12の姿勢と置換されるためのパラメータを含むことを除き、ステップ52と同一である。例えば、視線の姿勢は、座標系Cにおいて、X軸,Y軸,Z軸に対して、この視線を傾斜させるパラメータθX,θY,θZにより与えられる。また、シリンダーSDの方程式は、座標系Cにおいて、武器71のxm,ym,zm座標と置換されるようになっているパラメータを備えている。
【0060】
ステップ84は、記録された表面SCの方程式が、目標の測定位置で置換されるためのパラメータxA,yA,zAを含まないことを除き、ステップ54と同一である。特にこの実施形態においては、座標系Cにおける目標の位置は、予め知られている。この位置は一定である。
【0061】
初期化段階が一旦終了したら、保護装置70を使用するステップ86へ進む。ステップ88において、銃身10の端末の位置、および発射線12の方向が、エミッターレシーバ32および反射板34〜37により測定される。
【0062】
ステップ90では、コンピュター30は、パラメータxm,ym,zmおよびパラメータθX,θY,θZの測定値を取得し、次に、表面SDおよび表面SCの間に交差点があるか否かを確かめるために検索する。これを行うため、コンピュター30は、表面SDの構成された方程式を得るため、パラメータxm,ym,zmおよびパラメータθX,θY,θZを、ステップ88で得られた測定値と置換する。次に、コンピュター30は、表面SCの等式および表面SDの構成された等式により、形成された方程式系に対して少なくとも1つ解決法があるか否かを確かめる。交点がない場合は、ステップ66へ進む。その逆の場合は、ステップ68へ進む。このステップは、図3に記載されている。しかし、この場合、ステップ68には、抑制機構24を抑制させる指示は、エミッターレシーバ74を介して受信される。
【0063】
図6は、武器102からの発射に対して、目標6を保護するための保護装置100を示す。この保護装置100は、座標系Rにおいて、目標6の位置センサーが異なる方法で達成することを除き、保護装置20と同一の装置である。
【0064】
より詳しく述べると、3軸の磁気源104は、武器102の内部に収容されている。この磁気源104は、互いに非平行であるとともに、中心点で交差する3の方向に、磁界を送る磁気源である。これらの放出方向は、互いに直交しており、例えば、座標系Rにおいて、X軸,Y軸,Z軸とそれぞれ平行である。通常、この磁気源104は、各放出軸にそれぞれ巻回したコイルにより発生されられる。
【0065】
反射板34〜37は、1つ以上3軸の磁性センサーと置換されている。ここで、2つの3軸の磁気センサー106,108が用いられ、これらは、それぞれ、目標6の点Aおよび点Bに配置されている。目標6が、磁気センサー106,108が取付けられているベスト40を着用すると、点Aは目標の腹に接近し、点Bは目標の首に接近する。
【0066】
各磁気センサー106,108は、少なくとも3つ互いに非平行な測定軸を備えている。より詳しく言うと、各センサーは、各測定軸における磁界と直交する投影を測定する。このように、各センサーは、磁気源104より送波した磁界の方向、および振幅を測定することができる。よって、磁気源104と同様に、各磁気センサーの測定軸には、通常、それぞれコイルが巻回されている。
【0067】
磁気センサー106,108は、エミッターレシーバ110に接続されている。エミッターレシーバ110は、磁気センサー106,108により測定したものを、武器102に設けたエミッターレシーバ112へ伝達する。また、エミッターレシーバ110は、目標6を備えている。エミッターレシーバ110は、例えば、磁気センサー106,108と同様に、自由度の無いようにして、ベスト40に固定されている。
【0068】
この場合、エミッターレシーバ112は、保護装置20のエミッターレシーバ32の代替となるものである。また、このエミッターレシーバ112は、磁気センサー106,108の操作を、磁気源104の操作と同期化することができる。
【0069】
また、エミッターレシーバ112は、座標系Rにおいて点Aおよび点Bの位置と姿勢を計算するためモジュール114を備えている。これは、
−磁気センサー106,108から受けた測定と、
−磁気源104より送波した磁界の方向および振幅と、
−各センサー106,108の測定を磁気源104より送波した磁界に接続される数理モデルとに基づくものである。
【0070】
次に、装置100の操作につき、図7を参照して、さらに詳しく説明する。
【0071】
本発明の方法は、初期化段階120から開始される。この段階120は、2つのステップ122,124を備えている。ステップ122は、表面SDの方程式を記録するステップ52と同じステップである。ステップ124は、表面SC1,表面SC2をそれぞれ定義する2つ方程式がメモリ28に記録されることを除き、ステップ54と同じステップである。表面SC1を定める第1方程式は、点Aおよび点Bに関連付けられている。表面SC2を定義する第2方程式は、点Bと関連付けられている。これらの各第1方程式および第2方程式は、それぞれ、点Aと点Bの座標xA,yA,zA,xB,yB,zB、およびそれぞれ点Bの座標xB,yB,zBの値と置換されるためのパラメータを備えている。
【0072】
例えば、表面SC1は、回転軸と直交する2つの平行面により定められた回転筒状である。この場合、回転軸は、点Aおよび点Bを通っている。点Aは、これら2つの平面の中間にある。この筒状体の半径は、例えば20cm〜1mであり、好ましくは20cm〜60cmである。この筒状体の高さは、目標6を包含するように、例えば1.40m〜1.80mである。
【0073】
表面SC2は、点Bを中心とし、半径が30cm〜1mである球状である。
【0074】
初期化されたら、この方法は、使用段階126へ進む。ステップ128中において、点Aおよび点Bの位置は、センサー106,108、磁気源104、およびモジュール114により測定される。座標系Rにおける点Aおよび点Bの位置は、通常の方法で決定される。そのような決定方法は、例えば欧州特許出願第1502544号またはフランス国特許出願第0957205号に記載されている。
【0075】
次に、ステップ130中に、コンピュター30は、点Aおよび点Bの位置を測定する。この実施形態において、目標の姿勢は、測定された点Aおよび点Bの位置により推定される。また、このステップ130において、コンピュターは、表面SDおよび表面SC1、あるいは表面SC2の間の交点の有無を検索する。このステップ130は、例えば2回繰り返されるが、それ以外は、ステップ64と同じである。1回目は、表面SDおよび構成された表面SC1の間における交点を決定し、2回目は、表面SDおよび構成された表面SC2の間に交点があるか否かを決定する。
【0076】
上記したように、ステップ130中には、表面SC1,表面SC2の式のパラメータは、ステップ128で得られた測定値と置換される。
【0077】
もし、交点が検出されなかった場合、この方法は、ステップ66へ進み、逆に検出された場合、ステップ68へ進む。
【0078】
図8は、疑似武器144により移動目標142を発射するシミュレータ140を示す。目標142が人である場合、疑似武器144は、目標142に傷害を与えられるような発射体またはビームを発射することはできない。従って、例えば、疑似武器144は発射機構を有しない。この実施形態において、疑似武器144は、発射機構14を省略してあることを除き、武器4と同じ武器である。特に、この疑似武器144は、目標142上の衝突点を検出するための各種の必要な要素を備えている。
【0079】
これにより、発射抑制機構24は、目標を命中したか否か、および必要に応じ、検出した射撃点によってその他情報を、射手に表示するため、人間−機械インターフェース146と置換されている。
【0080】
次に、シミュレータ140の操作につき、図9を参照して、さらに詳しく説明する。この方法は、初期化段階50と同じ初期化段階から開始される。
【0081】
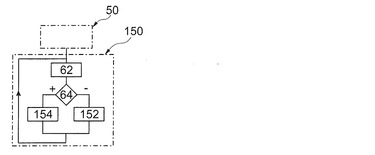
次に、シミュレータ140を使用する段階150へ進む。この段階150は、ステップ66,68がそれぞれステップ152,154と置換されていることを除き、段階60は同じの段階である。射手がレバー16を押すと、ステップ64へ進む。
【0082】
射撃点が検出されていない場合、ステップ52中に、この情報は、人間−機械インターフェース146経由で射手に連絡する。例えば、目標142が外れたことは、視覚信号または可聴信号で示される。また、この情報は、射撃点の存在に関する情報の非存在を基づき、人間−機械インターフェース146経由で、射手に連絡される。
【0083】
ステップ154中に、少なくとも1つの射撃点の存在が検出された場合、人間−機械インターフェース146は射手に、目標に命中したことを伝える。また、人間−機械インターフェースは、対応する点数を表示することができる。
通常、点数は、命中した表面SCの函数として変化し、好ましくは、この表面における衝突点の位置の函数として変化する。例えば、多くの点数は、軌跡が表面SCの中心、あるいは中心の近くに関連付けられ、より少ない点数は、軌跡が表面SCを、その中心から離れた距離で横断する発射に関連付けられる。
【0084】
他の多くの実施形態が可能である。例えば、武器は、自動火器、半自動火器、あるいは単発火器であってもよい。武器は、発射体、あるいはレザー光のようなビームを発射できるものであってもよい。
【0085】
発射機構は、異なる方法によるものとすることができ、例えば、衝撃に応じて、爆発用混合物の爆発を起こす発射ピンとすることもできる。
【0086】
位置センサーは、異なるものとすることもでき、例えば、4つ以上の反射板を使用できる。また、反射板は、武器に設けたエミッターレシーバ32により受信した電波送波器と置換することができる。この場合、好ましくは、4つのエミッターレシーバは、走行時間の計算用モジュールを特定できるように、4つの異なる電波を同時に送波する。エミッタおよびレシーバの間のタイミングの同期化は、例えば、送波した電波の特定な符号化により行われる。
【0087】
目標は、必ずしも人でなくては良く、衝突点を検出するために、必要な要素が取付けられている、例えば、車両やその他の移動体であってもよい。
【0088】
また、射撃点を検出する必要性のある、互いに機械的に独立している複数の目標であってもよい。この場合、例えば、上記で記載してあることを、各目標に対して実施する。
【0089】
射撃点の検出に応じて、前述で示した作動とは異なる作動を開始してもよい。例えば、武器に、引金を引くと、射手が直接に感知できるような警告音を発するものを設けることができる。この警告は、射撃点の検出に応じて発せられる。
【0090】
逆に、武器による付随的な損害を軽減することが望ましい場合、目標に射撃点が検出された際を除き、発射抑制機構は、アクティブ状態となるようにデフォルト設定されている。
【0091】
位置を測定する座標系は、必ずしも武器または目標に関連付ける必要はない。武器および目標と機械的に独立している座標系の場合、この座標系において、目標の位置のセンサー、および、この座標系における視線の位置と方向のセンサーを設ける。
【0092】
表面SCは、目標を保護するため、如何なる適切な形成を採用してもよい。特に、表面SCは、必ずしも領域を区切るわけではない。例えば、表面SCは、目標が後ろに隠されている平面であってもよい。
【0093】
この表面SCは、必ずしも一定であるわけはない。例えば、この表面は、目標上の複数点を離れた距離、および、その測定された位置によって変化できる。
【0094】
位置が測定された目標の1つ点または複数点は、必ずしも表面SCで覆われるわけではない。例えば、図6の実施形態において、点Aおよび点Bの位置を基づいて定義されたシリンダーの高さは、これらの点Aおよび点Bの間の距離より小さくてもよい。
【0095】
表面SCは、目標の1つ以上の点に関連付けられてもよい。例えば、表面SCが楕円形状である場合、好ましくは、目標の2つの点に関連付けられ、この表面の等式は、これら2つの点に対して測定した座標を構成する。
【0096】
上記した方法は、目標のN点の位置が測定される場合、同様に適用しうる。ただし、Nは2または6以上の整数である。例えば、これら各点の位置は、1つ以上の表面SCjを定義するために有用である。ただし、指数jは、目標の全部または一部に覆う表面を示す。
【0097】
簡単な変化としては、表面SDは簡単な軌跡で置換される。その他の変化としては、例えば、断面が長方形状などのような、その他回転筒状体が使用される。
【0098】
また、複数の表面SCjを互いに入れ子になる状態は可能である。ただし、指数jは、目標の全部または一部に覆う表面を示す。この場合、最も大きい表面のみを有する交差が検出された場合、射手に信号により警告する。逆に、最も面積の小さい表面を有する交差が検出された場合、発射抑制が自動的に作動する。これは、特に、目盛り付き警告を設置することが可能になる。好ましくは、表面SCjの式は、同一の目標の測定した位置に基づいて構成される。
【0099】
表面SDおよび表面SCは、目標と武器との間の距離と無関係であるのが好ましい。
【0100】
また、交点の検索は、目標の側で行ってもよい。
【0101】
また、検索においては、近似式で高速化してもよい。例えば、全ての交点を検出する必要はなく、表面SCで1つの交点のみを検出すればよい。また、表面SCと表面SDとにより区切られた領域の間で、交点を検索することが可能になる。
【0102】
方程式、表面SDの方程式は、追加のパラメータを備えていてもよい。例えば、表面SDの方程式は、地球の重力場の方向の機能である値で置換されるための追加パラメータを備えてもよい。これらのパラメータを置換するには、例えば、武器に、重力と直交する平面に対する視線の傾斜を測定する加速度計を設ける。このような変形により、上記したものを、弾道軌跡の場合に適用することが可能になる。弾道軌跡の場合は、シリンダーの直線母線は直線ではない。筒状は、軌跡を中心とした平面図形の移動として定義され、軌道のいずれの点においても、この弾道と正接する直交面に含まれる。平面形は例えば円状である。
【符号の説明】
【0103】
2 武装システム
4 武器
6 目標
8 弾丸
10 銃身
12 発射線
13 弾倉
14 発射機構
16 レバー
20 保護装置
24 発射抑制機構
28 メモリ
30 コンピュター
32 エミッターレシーバ
34〜37 反射板
40 ベスト胴着
42 計算モジュール
50 初期化段階
52 ステップ
54 ステップ
60 利用段階
62 ステップ
64 ステップ
66 ステップ
68 ステップ
70 保護装置
71 武器
72 筺体
74 エミッターレシーバ
80 初期化段階
82 ステップ
84 ステップ
88 ステップ
90 ステップ
100 装置
102 武器
104 磁気源
106、108 磁気センサー
110 送受波器
112 送受波器
114 モジュール
120 初期化段階
122 ステップ
124 ステップ
126 使用段階
128 ステップ
130 ステップ
140 シミュレータ
142 移動目標
144 疑似武器
146 人間−機械インターフェース
150 ステップ
152 ステップ
154 ステップ
A 点
B 点
C 座標系
O 原点
R 座標系
SC 表面
SD シリンダー
X、Y、Z 軸
【技術分野】
【0001】
本発明は、軽量型武器により移動目標を発射する発射体、またはビームの射撃点を検出する方法、移動目標を保護する方法、および実移動目標への発射をシミュレーションする方法に関する。さらに、本発明は、これらの方法を実施するためのデータ記録媒体、武器、およびこの方法を実施するための装置を対象とする。
【背景技術】
【0002】
目標に射撃点を検出する方法は、人の身体を保護するため、また銃撃シミュレーションゲームなど、多用途に実施されている。
【0003】
例えば、特許文献1には、射手における射撃点を知る方法が記載されている。この特許文献においては、射手は電磁波の全方位性送波器を備え、武器には、この電磁波の指向性センサーが装備されている。指向性センサーの測定軸は、武器の銃身の軸と一致している。そのため、指向性センサーが送波器より送波した電波を検出すると、射手は銃身の軸線上に位置しているため、射手は、発射による打撃を受けるおそれがあるということを意味している。詳しく述べると、指向性センサーは、全方位性エミッタが検出円錐の範囲内にあると、射手における射撃点を検出する。この検出円錐の頂点は、武器とは区別することができず、その回転軸は、武器の視線と区別することはできない。この検出円錐の断面は、武器が指す方向から離れる方向へ移動するのに伴って、徐々に大となる。
【0004】
しかし、この方法によると、射手は射撃点を誤検出するか、またはその逆に、射撃点を検出することができず、そのため、発射するために引金を引くと、弾丸が射手に当たってしまう恐れもある。
【0005】
例えば、射手が武器から遠く離れている場合、検出コーンの断面積は、射手が占めている実際の横断面積より、遥かに大きい。そのため、射手は、射撃点を誤って検出する恐れがある。
【0006】
逆に、もし射手が武器の極く近くにいる場合、射手の身体の一部が、武器の銃身の上に被さり、かつ全方位性送波器が、検出円錐の範囲外にある可能性もある。このような場合には、射撃点は検出されていないので、至近距離からの発射によって、射手が傷害を受ける可能性もある。
【0007】
先行技術文献としては、次のものを挙げることができる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】フランス国特許出願第2790547号
【特許文献2】米国特許第4218834B号
【特許文献3】欧州特許第1688697A1号
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明の目的は、武器の近くある移動目標における射撃点を、効果的に検出方法を提供することである。従って、本発明は、請求項1に記載の第1実施形態、および請求項4に記載の第2実施形態を対象としている。
【0010】
本発明の方法において、目標に関連する寸法は、この目標と武器と距離と必ずしも関連しているわけではない。また、レーザ光線を用いて、武器の周辺の環境をスイープする位置センサーとは違って、UWBにより変調した電波または磁界を使用するので、目標が武器の近くにあっても、目標点を精密に突き止めることができる。従って、目標が武器の近くにあっても、射撃点を確実に検出できる。特に、この方法によると、目標に対する至近距離発射を、確実に検出することができる。
【0011】
電磁波または磁界を使用するので、電波または磁界を透す対象物により、目標の一部が隠されていても、目標の位置を正確に求めることができる。そのため、位置センサーにおける目標に支持されている部分を、目標である人の服装の下方に簡単に隠すことができ、これによって、本発明の方法を実施していることが分かり難くなる。
【0012】
また、目標が遠くにある場合における射撃点の誤検出は少ない。
【0013】
さらに、本発明の方法によると、発射するために引金を引く前に、射撃点を検出することができる。
【0014】
最後に、この方法によると、発射体またはビームの軌跡の全長にわたって、射撃点を検出することができる。そのため、この方法は、直線発射、および弾道軌跡の発射の両方に適用することができる。なお「直線発射」とは、目標に対して直線的に発射するという意味であり、重力効果は無視できる。逆に、「弾道発射」とは、重力の影響により、目標に対して放物線の軌跡を描いて発射するという意味である。
【0015】
本発明の検出方法の実施形態においては、従属請求項に記載する特徴の1つ以上を備えることができる。
【0016】
また、本発明の検出方法の実施態様は、次のような利点を有する。
‐目標に対する方向を測定することにより、正確に表面SCを認識することができる。
‐武器に対して自由度の無いようにリンクした座標系を用いているので、視線の方向を測定しなくてもよい。
‐目標に自由度の無いようにリンクした座標系を用いているので、目標の位置を測定しなくてもよい。
【0017】
さらに、本発明は、請求項7に記載されているように、発射に対して実移動目標を保護する方法をも対象としている。
【0018】
また、本発明は、指示を電子コンピュターにより実行する際に、上記の方法の1つを実行するための指示を有するデータ記録媒体を対象としている。
【0019】
さらに、本発明は、上記の方法を実施するための武器を対象としている。
【0020】
最後に、本発明は、上記の方法を実施するための目標装置を対象としている。
【図面の簡単な説明】
【0021】
図を参照しながら、非限定的な実施例に関する、以下の説明を読むことにより、本発明を明確に把握できると思う。
【図1】武装システムの概略図である。
【図2】図1のシステムに適用される目標保護装置の第1実施形態の概略図である。
【図3】図1のシステムに適用される目標を保護する方法のフローチャートである。
【図4】目標保護装置の第2実施形態の概略図である。
【図5】図4の装置により移動目標を保護する方法を示すフローチャートである。
【図6】目標保護装置の第3実施形態の略図である。
【図7】図6の装置で目標を保護する方法のフローチャートである。
【図8】発射シミュレータの略図である。
【図9】図8のシミュレータを操作する方法を示す略図である。
【発明を実施するための形態】
【0022】
各図において、同じ符号は同じ要素を示す。
【0023】
以下の説明において、当業者に公知の特徴や機能については、詳しく記載しない。
【0024】
図1は、移動目標6へ発射体またはビームを発射しうる武器4を備える武装システム2を示す。
【0025】
発射体またはビームが、目標に打撃を与える点を「射撃点」と呼ぶこととする。この実施形態において、目標は人であり、発射体またはビームは、この人を射撃点で負傷させることを意図している。発射体である場合には、皮膚をこの発射体が射撃することにより、傷害が起こさせる。ビームがレーザー光線である場合には、傷害の原因の最も多くは射撃による火傷である。
【0026】
武器4は、軽量型であり、人が片手または両手で把持して使用できるように、十分に軽量であり、典型的には、回転式拳銃のような短銃、またはライフルのような長銃である。
【0027】
これ以降、武器4が、拳銃および長銃である特別なケースについて述べる。発射体は直径Dの弾丸8である。
【0028】
武器4は、
−発射線12に沿う銃身10と、
−1つ以上の弾丸8が入っている弾倉13と、
−銃身10内の弾丸8を、亜音速で推進させて爆発させるために、爆発用混合物を発射しうる発射機構14と、
−射手が手で引いて発射させるためのレバー16
とを備えている。
【0029】
発射線12は、弾丸8が発射される方向を向いている。また、その方向は、弾丸8が発射された方向でもある。
【0030】
発射機構14は、爆発を起こすため、爆発用混合物に必要なエネルギーを与えるために、放電を発生させることができるものである。
【0031】
この場合、レバー16は、武器4に取付けられている人間−機械インターフェースであり、
−発射のための引金を引かない休止位置と、
−発射のために直ちに引金を引くように発射機構14に発射コマンドを伝達する押込位置との間を、
手で移動させることができるようになっている。
【0032】
通常、レバーは、これらの2つ位置の間を、射手の指で移動させることができるようになっている機械的部材である。
【0033】
この武装システム2には、武器4からの発射に対して目標6を保護するための保護装置が設けられている。この保護装置は、図2に符号20をもって詳しく示してある。図2においては、図を簡単にするため、武器4は、破線四角で示してある。
【0034】
保護装置20は、
−目標6における衝突点を検出する機器と、
−射手がレバー16を引いても、発射しないようにする発射抑制機構24とを備えている。
【0035】
この場合、射撃点を検出するための装置は、
−武器4の座標系R(図1に示す)における目標6の点Aの位置のセンサーと、
−メモリ28と、
−データ記録媒体に記録させた指示、即ちこの場合には、メモリ28を実行できる、プログラム可能なコンピュター30とを備えている。
【0036】
座標系Rは、互いに直交する3つの軸X,軸Y,軸Zにより定められている。軸Xは、発射線12と区別することはできず、目標の方向を向いている。座標系Rにおいて、弾丸8の軌跡は、予め分かっている。この場合、軌跡は一定であり、座標系Rの軸Xに相当する。従って、これらの3つ軸が交差する原点Oは、武器4の銃身の端末に、自由度の無いように固定されている。
【0037】
メモリ28は、コンピュター30により図3の方法を実行するのに必要な指示およびデータを含んでいる。
【0038】
位置センサーは、座標系Rにおける点Aの座標xA,yA,zAを測定する。この実施形態においては、位置センサーは、
−武器4に自由度無く固定されているエミッターレシーバ32と、
−目標6が着用するベスト40を、自由度無く固定した、少なくとも4つの反射板34〜37とを備えている。
【0039】
エミッターレシーバ32は、UWB(Ultra Wideband:超広帯域無線)技術により変調した電波を送受する。この送受波器は、走行時間を計算する計算モジュール42を備えている。この計算モジュール42は、この送波器から送った電波が、エミッタ32と各反射板34〜37との間の距離を移動する時間を測定する。次に、この計算モジュール42は、送波した電波の既知の伝搬速度を基づいて、距離diに換算した走行時間を変換する。ただし、指数iは、電波が反射された反射板を示す。これにより、計算モジュール42は、4つの距離d1〜d4を測定する。距離d1〜d4は、それぞれ反射板34〜37に対応している。次に、この計算モジュール42は、距離diを、点Aの座標に変換する。座標が測定される点Aは、例えば、各反射板に関連付けられている均等に重み付けで計算した反射板34〜37の重心である。
【0040】
反射板34〜37は、送った電波をエミッターレシーバ32に向かって反射する。目標の位置姿勢の決定に関する曖昧さを防止するため、これら3つの反射板34〜36は、1つの同一面上に配置され、4つ目の反射板は、この平面の範囲外に配置されている。好ましくは、同じ平面上にある反射板は、少なくとも20cmまたは40cmの間隔で離れている。この場合、これらの反射板34〜37は、目標6が着用するベスト40に自由度の無いように固定されている。例えば、目標6がこのベストを着用している際、1つの反射板34,35は、それぞれの肩に配置され、他の反射板36は、腹に配置され、最後に反射板37は、背中の中央に配置される。
【0041】
コンピュター30のコマンドにより、発射を抑制するための発射抑制機構24を、アクティブ状態とパッシィブ状態の間を切り替えることができる。アクティブ状態では、発射するための引金を引くことが抑制される。パッシブ状態では、レバー16を押すことにより、発射するための引金を引くことができる。
【0042】
例えば、この発射抑制機構24は、抑制コマンドに応じて、押込位置へのレバー16の移動を機械的に防止するか、あるいは、レバー16が押込位置であっても、発射するための引金を引けないように、発射機構14により放電の発生を抑制する。
【0043】
図2に示すように、メモリ28、コンピュター30およびエミッターレシーバ32は、武器4に固定されている。より正確には、メモリ28、コンピュター30およびエミッターレシーバ32は、武器4に設けられた筺体の内部に収容され、手やペンチで外し難い覆蓋が施されている。この覆蓋は、標準型ねじドライバの先端に合わないねじ頭を有するねじにより閉じられているのが好ましい。
【0044】
次に、保護装置20の操作について、図3を参照して、さらに詳しく説明する。
【0045】
この操作では、初期化段階50から開始される。この段階50は、発射線12に沿って銃身10の端末から無限に伸びる筒状SDの方程式をメモリ28に記録するステップ52から開始される。ここで、シリンダーSDは、半径rpの回転筒状である。半径rpはD/2およびβ*D/2の間であり、ただし、Dは弾丸8の直径であり、βは、厳密に1以上であり、かつ100,10、または3以下の定数である。例えば、この場合、半径rpは1cm以上10cm以下であり、5cmである。例えば、座標系Rにおける筒状SDの方程式は、次のようになる。
(1) y2+z2=rp2 および、x≧0
【0046】
ステップ54中に、表面SCを定める式が、メモリ28に記録される。表面SCは、点Aとともに、メモリ28に関連付けられている。より正確には、座標系Rにおけるこの表面SCの位置は、点Aの位置である。この場合、この表面SCは、点Aを包含する領域を定める。また、この実施形態において、目標6の領域の大部分を包含している。例えば、表面SCは、半径rcの点Aを中心とする球状である。この実施形態においては、半径rcは、50cm以上、または1m以上である。
【0047】
表面SCの式は、点Aから測定した座標xA,yA,zAの函数である値と置換されるためパラメータを含んでいる。この場合、これらのパラメータは、それぞれ座標xA,yA,zAと等しい。従って、これらには、xA,yA,zAの印が付けられている。表面SCは、点Aと武器4を離れた距離より独立しているのが好ましい。例えば、表面SCの方程式は、次の通りである:
(2) (x−xA)2 +(y−yA)2 +(z−zA)2 =rc2
【0048】
また、この初期化段階中には、表面SCを定める半径rcも、メモリ28に記録される。
【0049】
保護装置20は、一旦初期化されたら、次の利用段階60へ進むことが可能になる。ステップ62では、位置センサーは、座標系Rにおいて点Aの座標xA,yA,zAを継続的に測定する。これを行うため、エミッターレシーバ32は、反射板34〜37により反射された電波を送る。計算モジュール42は、エミッターレシーバ32及びこれらの反射板34〜37の間の走行時間を測定し、そこから、距離d1〜d4を推定する。これらの距離d1からd4に基づいて、計算モジュール42は、座標系Rにおける点Aの座標xA,yA,zAを計算する。
【0050】
ステップ64中において、コンピュター30は、位置センサーにより測定した座標を取得し、次に、表面SDおよび表面SCの間に、少なくとも1つの交点があるか否かを調べる。これを行うため、ステップ62では、コンピュター30は、方程式(2)のパラメータxA,yA,zAを、これらのパラメータの測定値で置換し、これにより、所望の方程式が得られる。
【0051】
次に、コンピュター30は、座標xA,yA,zAで構成した式(1)と方程式(2)を組み合わせた式に解決法を求める。この式は、交差点において、1点、無数の点、あるいは点がないことを検出することができる。
【0052】
交点において、点がないことを検出した場合、ステップ66中において、コンピュター30は、パッシィブ状態に切り替えさせられて、発射抑制機構24を制御する。これにより、武器4は、目標6以外のあらゆる対象物に対して使用可能のままとなる。
【0053】
一方、表面SDおよび表面SCの間に、少なくとも1つの交点が検出された場合、ステップ68では、コンピュター30は、アクティブ状態に直ちに切り替えさせるため発射抑制機構24を制御する。これにより、武器4が目標6を指すとき、この武器4より目標6へ向かって発射しても、引金を引くことは不可能となる。従って、目標は効果的に保護されることとなる。
【0054】
このような保護装置は、例えば、警備員が武器を奪われて、その武器を警備員に対して使用されることを防止するには、特に効果的である。
【0055】
図4は、武器71から発射した発射に対して、目標6を保護するための保護装置70を示す。この保護装置70は、次の点を除いて、保護装置20と同様である。
−コンピュター30、エミッタ32、及びメモリ28は、目標6に設けた筺体72内に配置されている。
−4つの反射板34〜37は、自由度の無いようにして武器4に固定されている。
【0056】
ここで、反射板34〜36は、発射線12に対して直交する平面内に固定され、反射板37は、武器が指した方向に、この平面の前方に配置されている。
【0057】
また、武器71は、発射抑制機構24に接続されたエミッターレシーバ74を備えている。
【0058】
この実施形態において、反射板34〜37およびエミッターレシーバ32の組み合わせは、筺体72に対して自由度の無い座標系Cにおいて、武器71の座標、および発射線12の方向のセンサーを形成している。4つ反射板が使用されているので、武器71が指す方向は測定される。
【0059】
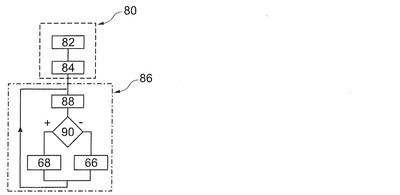
保護装置70の操作を、図5の方法を参照して、さらに詳しく説明する。図5の方法は、初期化段階80から開始される。この段階80は、初期化段階50と同様の段階であり、2つのステップ82およびステップ84を備えている。ステップ82は、記録されたシリンダーSDの方程式が発射線12の姿勢と置換されるためのパラメータを含むことを除き、ステップ52と同一である。例えば、視線の姿勢は、座標系Cにおいて、X軸,Y軸,Z軸に対して、この視線を傾斜させるパラメータθX,θY,θZにより与えられる。また、シリンダーSDの方程式は、座標系Cにおいて、武器71のxm,ym,zm座標と置換されるようになっているパラメータを備えている。
【0060】
ステップ84は、記録された表面SCの方程式が、目標の測定位置で置換されるためのパラメータxA,yA,zAを含まないことを除き、ステップ54と同一である。特にこの実施形態においては、座標系Cにおける目標の位置は、予め知られている。この位置は一定である。
【0061】
初期化段階が一旦終了したら、保護装置70を使用するステップ86へ進む。ステップ88において、銃身10の端末の位置、および発射線12の方向が、エミッターレシーバ32および反射板34〜37により測定される。
【0062】
ステップ90では、コンピュター30は、パラメータxm,ym,zmおよびパラメータθX,θY,θZの測定値を取得し、次に、表面SDおよび表面SCの間に交差点があるか否かを確かめるために検索する。これを行うため、コンピュター30は、表面SDの構成された方程式を得るため、パラメータxm,ym,zmおよびパラメータθX,θY,θZを、ステップ88で得られた測定値と置換する。次に、コンピュター30は、表面SCの等式および表面SDの構成された等式により、形成された方程式系に対して少なくとも1つ解決法があるか否かを確かめる。交点がない場合は、ステップ66へ進む。その逆の場合は、ステップ68へ進む。このステップは、図3に記載されている。しかし、この場合、ステップ68には、抑制機構24を抑制させる指示は、エミッターレシーバ74を介して受信される。
【0063】
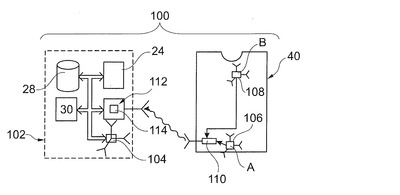
図6は、武器102からの発射に対して、目標6を保護するための保護装置100を示す。この保護装置100は、座標系Rにおいて、目標6の位置センサーが異なる方法で達成することを除き、保護装置20と同一の装置である。
【0064】
より詳しく述べると、3軸の磁気源104は、武器102の内部に収容されている。この磁気源104は、互いに非平行であるとともに、中心点で交差する3の方向に、磁界を送る磁気源である。これらの放出方向は、互いに直交しており、例えば、座標系Rにおいて、X軸,Y軸,Z軸とそれぞれ平行である。通常、この磁気源104は、各放出軸にそれぞれ巻回したコイルにより発生されられる。
【0065】
反射板34〜37は、1つ以上3軸の磁性センサーと置換されている。ここで、2つの3軸の磁気センサー106,108が用いられ、これらは、それぞれ、目標6の点Aおよび点Bに配置されている。目標6が、磁気センサー106,108が取付けられているベスト40を着用すると、点Aは目標の腹に接近し、点Bは目標の首に接近する。
【0066】
各磁気センサー106,108は、少なくとも3つ互いに非平行な測定軸を備えている。より詳しく言うと、各センサーは、各測定軸における磁界と直交する投影を測定する。このように、各センサーは、磁気源104より送波した磁界の方向、および振幅を測定することができる。よって、磁気源104と同様に、各磁気センサーの測定軸には、通常、それぞれコイルが巻回されている。
【0067】
磁気センサー106,108は、エミッターレシーバ110に接続されている。エミッターレシーバ110は、磁気センサー106,108により測定したものを、武器102に設けたエミッターレシーバ112へ伝達する。また、エミッターレシーバ110は、目標6を備えている。エミッターレシーバ110は、例えば、磁気センサー106,108と同様に、自由度の無いようにして、ベスト40に固定されている。
【0068】
この場合、エミッターレシーバ112は、保護装置20のエミッターレシーバ32の代替となるものである。また、このエミッターレシーバ112は、磁気センサー106,108の操作を、磁気源104の操作と同期化することができる。
【0069】
また、エミッターレシーバ112は、座標系Rにおいて点Aおよび点Bの位置と姿勢を計算するためモジュール114を備えている。これは、
−磁気センサー106,108から受けた測定と、
−磁気源104より送波した磁界の方向および振幅と、
−各センサー106,108の測定を磁気源104より送波した磁界に接続される数理モデルとに基づくものである。
【0070】
次に、装置100の操作につき、図7を参照して、さらに詳しく説明する。
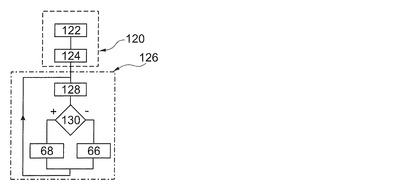
【0071】
本発明の方法は、初期化段階120から開始される。この段階120は、2つのステップ122,124を備えている。ステップ122は、表面SDの方程式を記録するステップ52と同じステップである。ステップ124は、表面SC1,表面SC2をそれぞれ定義する2つ方程式がメモリ28に記録されることを除き、ステップ54と同じステップである。表面SC1を定める第1方程式は、点Aおよび点Bに関連付けられている。表面SC2を定義する第2方程式は、点Bと関連付けられている。これらの各第1方程式および第2方程式は、それぞれ、点Aと点Bの座標xA,yA,zA,xB,yB,zB、およびそれぞれ点Bの座標xB,yB,zBの値と置換されるためのパラメータを備えている。
【0072】
例えば、表面SC1は、回転軸と直交する2つの平行面により定められた回転筒状である。この場合、回転軸は、点Aおよび点Bを通っている。点Aは、これら2つの平面の中間にある。この筒状体の半径は、例えば20cm〜1mであり、好ましくは20cm〜60cmである。この筒状体の高さは、目標6を包含するように、例えば1.40m〜1.80mである。
【0073】
表面SC2は、点Bを中心とし、半径が30cm〜1mである球状である。
【0074】
初期化されたら、この方法は、使用段階126へ進む。ステップ128中において、点Aおよび点Bの位置は、センサー106,108、磁気源104、およびモジュール114により測定される。座標系Rにおける点Aおよび点Bの位置は、通常の方法で決定される。そのような決定方法は、例えば欧州特許出願第1502544号またはフランス国特許出願第0957205号に記載されている。
【0075】
次に、ステップ130中に、コンピュター30は、点Aおよび点Bの位置を測定する。この実施形態において、目標の姿勢は、測定された点Aおよび点Bの位置により推定される。また、このステップ130において、コンピュターは、表面SDおよび表面SC1、あるいは表面SC2の間の交点の有無を検索する。このステップ130は、例えば2回繰り返されるが、それ以外は、ステップ64と同じである。1回目は、表面SDおよび構成された表面SC1の間における交点を決定し、2回目は、表面SDおよび構成された表面SC2の間に交点があるか否かを決定する。
【0076】
上記したように、ステップ130中には、表面SC1,表面SC2の式のパラメータは、ステップ128で得られた測定値と置換される。
【0077】
もし、交点が検出されなかった場合、この方法は、ステップ66へ進み、逆に検出された場合、ステップ68へ進む。
【0078】
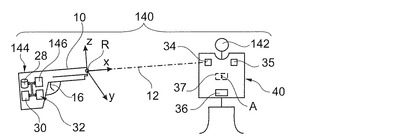
図8は、疑似武器144により移動目標142を発射するシミュレータ140を示す。目標142が人である場合、疑似武器144は、目標142に傷害を与えられるような発射体またはビームを発射することはできない。従って、例えば、疑似武器144は発射機構を有しない。この実施形態において、疑似武器144は、発射機構14を省略してあることを除き、武器4と同じ武器である。特に、この疑似武器144は、目標142上の衝突点を検出するための各種の必要な要素を備えている。
【0079】
これにより、発射抑制機構24は、目標を命中したか否か、および必要に応じ、検出した射撃点によってその他情報を、射手に表示するため、人間−機械インターフェース146と置換されている。
【0080】
次に、シミュレータ140の操作につき、図9を参照して、さらに詳しく説明する。この方法は、初期化段階50と同じ初期化段階から開始される。
【0081】
次に、シミュレータ140を使用する段階150へ進む。この段階150は、ステップ66,68がそれぞれステップ152,154と置換されていることを除き、段階60は同じの段階である。射手がレバー16を押すと、ステップ64へ進む。
【0082】
射撃点が検出されていない場合、ステップ52中に、この情報は、人間−機械インターフェース146経由で射手に連絡する。例えば、目標142が外れたことは、視覚信号または可聴信号で示される。また、この情報は、射撃点の存在に関する情報の非存在を基づき、人間−機械インターフェース146経由で、射手に連絡される。
【0083】
ステップ154中に、少なくとも1つの射撃点の存在が検出された場合、人間−機械インターフェース146は射手に、目標に命中したことを伝える。また、人間−機械インターフェースは、対応する点数を表示することができる。
通常、点数は、命中した表面SCの函数として変化し、好ましくは、この表面における衝突点の位置の函数として変化する。例えば、多くの点数は、軌跡が表面SCの中心、あるいは中心の近くに関連付けられ、より少ない点数は、軌跡が表面SCを、その中心から離れた距離で横断する発射に関連付けられる。
【0084】
他の多くの実施形態が可能である。例えば、武器は、自動火器、半自動火器、あるいは単発火器であってもよい。武器は、発射体、あるいはレザー光のようなビームを発射できるものであってもよい。
【0085】
発射機構は、異なる方法によるものとすることができ、例えば、衝撃に応じて、爆発用混合物の爆発を起こす発射ピンとすることもできる。
【0086】
位置センサーは、異なるものとすることもでき、例えば、4つ以上の反射板を使用できる。また、反射板は、武器に設けたエミッターレシーバ32により受信した電波送波器と置換することができる。この場合、好ましくは、4つのエミッターレシーバは、走行時間の計算用モジュールを特定できるように、4つの異なる電波を同時に送波する。エミッタおよびレシーバの間のタイミングの同期化は、例えば、送波した電波の特定な符号化により行われる。
【0087】
目標は、必ずしも人でなくては良く、衝突点を検出するために、必要な要素が取付けられている、例えば、車両やその他の移動体であってもよい。
【0088】
また、射撃点を検出する必要性のある、互いに機械的に独立している複数の目標であってもよい。この場合、例えば、上記で記載してあることを、各目標に対して実施する。
【0089】
射撃点の検出に応じて、前述で示した作動とは異なる作動を開始してもよい。例えば、武器に、引金を引くと、射手が直接に感知できるような警告音を発するものを設けることができる。この警告は、射撃点の検出に応じて発せられる。
【0090】
逆に、武器による付随的な損害を軽減することが望ましい場合、目標に射撃点が検出された際を除き、発射抑制機構は、アクティブ状態となるようにデフォルト設定されている。
【0091】
位置を測定する座標系は、必ずしも武器または目標に関連付ける必要はない。武器および目標と機械的に独立している座標系の場合、この座標系において、目標の位置のセンサー、および、この座標系における視線の位置と方向のセンサーを設ける。
【0092】
表面SCは、目標を保護するため、如何なる適切な形成を採用してもよい。特に、表面SCは、必ずしも領域を区切るわけではない。例えば、表面SCは、目標が後ろに隠されている平面であってもよい。
【0093】
この表面SCは、必ずしも一定であるわけはない。例えば、この表面は、目標上の複数点を離れた距離、および、その測定された位置によって変化できる。
【0094】
位置が測定された目標の1つ点または複数点は、必ずしも表面SCで覆われるわけではない。例えば、図6の実施形態において、点Aおよび点Bの位置を基づいて定義されたシリンダーの高さは、これらの点Aおよび点Bの間の距離より小さくてもよい。
【0095】
表面SCは、目標の1つ以上の点に関連付けられてもよい。例えば、表面SCが楕円形状である場合、好ましくは、目標の2つの点に関連付けられ、この表面の等式は、これら2つの点に対して測定した座標を構成する。
【0096】
上記した方法は、目標のN点の位置が測定される場合、同様に適用しうる。ただし、Nは2または6以上の整数である。例えば、これら各点の位置は、1つ以上の表面SCjを定義するために有用である。ただし、指数jは、目標の全部または一部に覆う表面を示す。
【0097】
簡単な変化としては、表面SDは簡単な軌跡で置換される。その他の変化としては、例えば、断面が長方形状などのような、その他回転筒状体が使用される。
【0098】
また、複数の表面SCjを互いに入れ子になる状態は可能である。ただし、指数jは、目標の全部または一部に覆う表面を示す。この場合、最も大きい表面のみを有する交差が検出された場合、射手に信号により警告する。逆に、最も面積の小さい表面を有する交差が検出された場合、発射抑制が自動的に作動する。これは、特に、目盛り付き警告を設置することが可能になる。好ましくは、表面SCjの式は、同一の目標の測定した位置に基づいて構成される。
【0099】
表面SDおよび表面SCは、目標と武器との間の距離と無関係であるのが好ましい。
【0100】
また、交点の検索は、目標の側で行ってもよい。
【0101】
また、検索においては、近似式で高速化してもよい。例えば、全ての交点を検出する必要はなく、表面SCで1つの交点のみを検出すればよい。また、表面SCと表面SDとにより区切られた領域の間で、交点を検索することが可能になる。
【0102】
方程式、表面SDの方程式は、追加のパラメータを備えていてもよい。例えば、表面SDの方程式は、地球の重力場の方向の機能である値で置換されるための追加パラメータを備えてもよい。これらのパラメータを置換するには、例えば、武器に、重力と直交する平面に対する視線の傾斜を測定する加速度計を設ける。このような変形により、上記したものを、弾道軌跡の場合に適用することが可能になる。弾道軌跡の場合は、シリンダーの直線母線は直線ではない。筒状は、軌跡を中心とした平面図形の移動として定義され、軌道のいずれの点においても、この弾道と正接する直交面に含まれる。平面形は例えば円状である。
【符号の説明】
【0103】
2 武装システム
4 武器
6 目標
8 弾丸
10 銃身
12 発射線
13 弾倉
14 発射機構
16 レバー
20 保護装置
24 発射抑制機構
28 メモリ
30 コンピュター
32 エミッターレシーバ
34〜37 反射板
40 ベスト胴着
42 計算モジュール
50 初期化段階
52 ステップ
54 ステップ
60 利用段階
62 ステップ
64 ステップ
66 ステップ
68 ステップ
70 保護装置
71 武器
72 筺体
74 エミッターレシーバ
80 初期化段階
82 ステップ
84 ステップ
88 ステップ
90 ステップ
100 装置
102 武器
104 磁気源
106、108 磁気センサー
110 送受波器
112 送受波器
114 モジュール
120 初期化段階
122 ステップ
124 ステップ
126 使用段階
128 ステップ
130 ステップ
140 シミュレータ
142 移動目標
144 疑似武器
146 人間−機械インターフェース
150 ステップ
152 ステップ
154 ステップ
A 点
B 点
C 座標系
O 原点
R 座標系
SC 表面
SD シリンダー
X、Y、Z 軸
【特許請求の範囲】
【請求項1】
1人で把持して使用できる軽量型武器により、移動目標に対して発射した発射体、またはビームの射撃点を検出する方法であって、
(a)第1方程式が3次元座標系において、目標点の座標を示す値と置換されるためのパラメータを含む、目標の少なくとも一部を覆うことができる仕上げ面Scを定めるための第1の式を記録するステップ(54;124)と、
(b)前記座標系において、軽量型武器により発射した発射体またはビームの軌跡、あるいは、軌跡を中心とする筒状体SDを定義するための第2の式を記録するステップ(52;122)と、
(c)UWB技術(Ultra Wideband:超広帯域無線)により変調した電波の走行時間を基づいて、もしくは、電子センサーの少なくとも一部が、目標により支持されている電子センサーで、1つ以上の3軸の磁性センサーにより磁界を測定することを基づいて、目標点の座標を定めるステップ(62;128)と、
(d)パラメータが定めた目標点の座標の函数を示す値と置換された第2の記録された式、および第1の記録された式を用いることにより、表面SCおよび発射体またはビームの軌跡の間、あるいは表面SCおよび表面SDの間における、交点の存在を検索するステップ(64;130)と、
(e)少なくとも1つの交点が検出された場合、射撃点の存在を表示するステップ(68;154)、およびその逆の場合、射撃点の非存在を示すステップ(66;152)
とを備えることを特徴とする方法。
【請求項2】
第1の式は、前記座標系において、目標の姿勢の函数である値で置換されるための第2パラメータを備え、
前記目標姿勢の測定とは、少なくとも一部が目標により支持されている電子センサーで行い、
交点を検索するステップ(130)では、第1の式の第2パラメータを、目標の測定した姿勢の函数である値と置換する請求項1に記載の方法。
【請求項3】
座標系は、武器に、自由度の無いようにリンクされている、請求項1または2に記載の方法。
【請求項4】
1人で把持して使用できる、軽量型武器により、実移動目標を発射する発射体、またはビームの射撃点を検出する方法であって、
(a)3次元座標系において目標の少なくとも一部を覆うことができる仕上げ面Scを定める第1式を記録するステップ(84)と、
(b)武器の位置の機能である値で置換されるための第1パラメータ、および武器の視線方向の機能である値で置換されるための第2パラメータを含み、前記座標系において、軽量型武器により発射した発射体またはビームの軌跡、あるいは軌跡を中心とした筒状SDを定める第2の式を記録するステップ(82)と、
(c)UWB技術(Ultra Wideband:超広帯域無線)により変調した電波の移動時間に基づいて、もしくは、電子センサーの少なくとも一部が目標により支持されている電子センサーにより、1つ以上の3軸の磁性センサーにより磁界を測定することを基づいて、3次元座標系において、武器の位置および武器の示す方向を測定するステップ(88)と、
(d)第1パラメータおよび第2パラメータがそれぞれ測定した位置、および測定した方向の機能である値で置換された第1の式および第2の式を用いて、表面SCおよび発射体またはビームの軌跡の間、あるいはは表面SCおよび表面SDの間における、交点を検索するステップ(90)と、
(e)少なくとも1つの交点を検出した場合、射撃点の存在を示すステップ(68)、およびその逆の場合、射撃点の非存在を示すステップ(66)とを備えることを特徴とする方法。
【請求項5】
座標系は、目標に、自由度の無いようにリンクされている請求項4に記載の方法。
【請求項6】
ステップ(a)〜(e)は、前記目標のN個の異なった点に対して繰り返される(ただしNは、2以上の整数である)請求項1〜5のいずれかに記載の方法。
【請求項7】
発射に対して実移動目標を保護するための方法であって、
人が把持し使用できる武器を、発射するために引金を引く前に、前記目標に軽量型武器により発射される発射体またはビームの射撃点を検出するステップ(64;90;130)と、
射撃点の検出に応じて、前記武器の発射の体系的に抑制するステップ(68)、およびその逆の場合、発射が体系的に抑制されていないステップとを備え、
検出するステップを、請求項1〜6のいずれかに記載の方法により行うことを特徴とする発射に対して実移動目標を保護する方法。
【請求項8】
実移動目標への発射をシミュレーションする方法であって、
人が把持し使用できる軽量型武器により発射した発射体またはシミュレートされたビームの射撃点を、発射するために引金を引く瞬間に検出するステップ(64)と、
衝突点の検出に応じて、人間−機械インターフェース経由で発射がその目標を命中したことを射手に指示するステップ(154)、およびその逆の場合、前記目標に射撃点の存在であることを射手に表示しないステップとを備え、
検出するステップは、請求項1〜6のいずれか1項に記載の方法により実施する
ことを特徴とする実移動目標への発射をシミュレーションする方法。
【請求項9】
データ記録媒体(28)は、指示が電子コンピュターにより実行される際、請求項1〜8のいずれかに記載の方法を実施するための前記指示を備えていることを特徴とするデータ記録媒体。
【請求項10】
請求項1〜3のいずれか、又は請求項6に記載の方法を実施するための軽量型武器において、
前記第1式は、3次元座標系において目標点の座標の機能である値にで置換されるためパラメータを含み、目標の少なくとも一部を覆うことができる仕上げ面Scを定める第1式、および
武器により発射した発射体またはビームの軌跡、あるいは前記軌跡を中心とする筒状SDを、前記座標系において定義する第2式を含むメモリ(28)と、
測定した目標点の座標を取得し、
前記パラメータが目標点の取得した座標の機能である値と置換された、第2の記録された方程式および第1の記録された式を用いることにより、発射体またはビームの軌跡の交点、または表面SCおよび表面SDの交点を検索し、
少なくとも1つの交点が検出された場合、射撃点の存在を表示し、およびその逆の場合、射撃点の非存在を表示するために
プログラムされた電子コンピュター(30)とを備えることを特徴とする請求項1〜3のいずれか、または請求項6に記載の方法を実施するようになっている軽量型武器。
【請求項11】
請求項4〜6のいずれか1項に記載の方法を実施するための目標装置において、
3次元座標系において目標の少なくとも一部を覆うことができる仕上げ面Scを定める第1の式、および
前記第2の式が、前記武器の前記位置の機能である値で置換されるための第1パラメータ、および前記武器の視線の前記方向の機能である値で置換されるための第2パラメータを有し、武器により発射した発射体またはビームの軌跡、あるいは前記軌跡を中心とする筒状体SDを、前記座標系において定める第2式を含むメモリ(28)と、
前記武器の前記位置およびその視線の方向を取得し、
前記第1パラメータおよび第2パラメータがそれぞれの取得した位置、および方向の函数である値で置換された、第1の式および第2の式を用いることにより、前記表面SCおよび発射体またはビームの軌跡の間、あるいは表面SCおよび表面SDの間の交点を検出し、
少なくとも1つの交点が検出された場合、衝突点の存在を表示し、その逆の場合、射撃の非存在を表示するようにプログラムされた電子コンピュター(30)とを備えるを特徴とする請求項4〜6のいずれか1項に記載の方法を実行するようになっている目標装置。
【請求項1】
1人で把持して使用できる軽量型武器により、移動目標に対して発射した発射体、またはビームの射撃点を検出する方法であって、
(a)第1方程式が3次元座標系において、目標点の座標を示す値と置換されるためのパラメータを含む、目標の少なくとも一部を覆うことができる仕上げ面Scを定めるための第1の式を記録するステップ(54;124)と、
(b)前記座標系において、軽量型武器により発射した発射体またはビームの軌跡、あるいは、軌跡を中心とする筒状体SDを定義するための第2の式を記録するステップ(52;122)と、
(c)UWB技術(Ultra Wideband:超広帯域無線)により変調した電波の走行時間を基づいて、もしくは、電子センサーの少なくとも一部が、目標により支持されている電子センサーで、1つ以上の3軸の磁性センサーにより磁界を測定することを基づいて、目標点の座標を定めるステップ(62;128)と、
(d)パラメータが定めた目標点の座標の函数を示す値と置換された第2の記録された式、および第1の記録された式を用いることにより、表面SCおよび発射体またはビームの軌跡の間、あるいは表面SCおよび表面SDの間における、交点の存在を検索するステップ(64;130)と、
(e)少なくとも1つの交点が検出された場合、射撃点の存在を表示するステップ(68;154)、およびその逆の場合、射撃点の非存在を示すステップ(66;152)
とを備えることを特徴とする方法。
【請求項2】
第1の式は、前記座標系において、目標の姿勢の函数である値で置換されるための第2パラメータを備え、
前記目標姿勢の測定とは、少なくとも一部が目標により支持されている電子センサーで行い、
交点を検索するステップ(130)では、第1の式の第2パラメータを、目標の測定した姿勢の函数である値と置換する請求項1に記載の方法。
【請求項3】
座標系は、武器に、自由度の無いようにリンクされている、請求項1または2に記載の方法。
【請求項4】
1人で把持して使用できる、軽量型武器により、実移動目標を発射する発射体、またはビームの射撃点を検出する方法であって、
(a)3次元座標系において目標の少なくとも一部を覆うことができる仕上げ面Scを定める第1式を記録するステップ(84)と、
(b)武器の位置の機能である値で置換されるための第1パラメータ、および武器の視線方向の機能である値で置換されるための第2パラメータを含み、前記座標系において、軽量型武器により発射した発射体またはビームの軌跡、あるいは軌跡を中心とした筒状SDを定める第2の式を記録するステップ(82)と、
(c)UWB技術(Ultra Wideband:超広帯域無線)により変調した電波の移動時間に基づいて、もしくは、電子センサーの少なくとも一部が目標により支持されている電子センサーにより、1つ以上の3軸の磁性センサーにより磁界を測定することを基づいて、3次元座標系において、武器の位置および武器の示す方向を測定するステップ(88)と、
(d)第1パラメータおよび第2パラメータがそれぞれ測定した位置、および測定した方向の機能である値で置換された第1の式および第2の式を用いて、表面SCおよび発射体またはビームの軌跡の間、あるいはは表面SCおよび表面SDの間における、交点を検索するステップ(90)と、
(e)少なくとも1つの交点を検出した場合、射撃点の存在を示すステップ(68)、およびその逆の場合、射撃点の非存在を示すステップ(66)とを備えることを特徴とする方法。
【請求項5】
座標系は、目標に、自由度の無いようにリンクされている請求項4に記載の方法。
【請求項6】
ステップ(a)〜(e)は、前記目標のN個の異なった点に対して繰り返される(ただしNは、2以上の整数である)請求項1〜5のいずれかに記載の方法。
【請求項7】
発射に対して実移動目標を保護するための方法であって、
人が把持し使用できる武器を、発射するために引金を引く前に、前記目標に軽量型武器により発射される発射体またはビームの射撃点を検出するステップ(64;90;130)と、
射撃点の検出に応じて、前記武器の発射の体系的に抑制するステップ(68)、およびその逆の場合、発射が体系的に抑制されていないステップとを備え、
検出するステップを、請求項1〜6のいずれかに記載の方法により行うことを特徴とする発射に対して実移動目標を保護する方法。
【請求項8】
実移動目標への発射をシミュレーションする方法であって、
人が把持し使用できる軽量型武器により発射した発射体またはシミュレートされたビームの射撃点を、発射するために引金を引く瞬間に検出するステップ(64)と、
衝突点の検出に応じて、人間−機械インターフェース経由で発射がその目標を命中したことを射手に指示するステップ(154)、およびその逆の場合、前記目標に射撃点の存在であることを射手に表示しないステップとを備え、
検出するステップは、請求項1〜6のいずれか1項に記載の方法により実施する
ことを特徴とする実移動目標への発射をシミュレーションする方法。
【請求項9】
データ記録媒体(28)は、指示が電子コンピュターにより実行される際、請求項1〜8のいずれかに記載の方法を実施するための前記指示を備えていることを特徴とするデータ記録媒体。
【請求項10】
請求項1〜3のいずれか、又は請求項6に記載の方法を実施するための軽量型武器において、
前記第1式は、3次元座標系において目標点の座標の機能である値にで置換されるためパラメータを含み、目標の少なくとも一部を覆うことができる仕上げ面Scを定める第1式、および
武器により発射した発射体またはビームの軌跡、あるいは前記軌跡を中心とする筒状SDを、前記座標系において定義する第2式を含むメモリ(28)と、
測定した目標点の座標を取得し、
前記パラメータが目標点の取得した座標の機能である値と置換された、第2の記録された方程式および第1の記録された式を用いることにより、発射体またはビームの軌跡の交点、または表面SCおよび表面SDの交点を検索し、
少なくとも1つの交点が検出された場合、射撃点の存在を表示し、およびその逆の場合、射撃点の非存在を表示するために
プログラムされた電子コンピュター(30)とを備えることを特徴とする請求項1〜3のいずれか、または請求項6に記載の方法を実施するようになっている軽量型武器。
【請求項11】
請求項4〜6のいずれか1項に記載の方法を実施するための目標装置において、
3次元座標系において目標の少なくとも一部を覆うことができる仕上げ面Scを定める第1の式、および
前記第2の式が、前記武器の前記位置の機能である値で置換されるための第1パラメータ、および前記武器の視線の前記方向の機能である値で置換されるための第2パラメータを有し、武器により発射した発射体またはビームの軌跡、あるいは前記軌跡を中心とする筒状体SDを、前記座標系において定める第2式を含むメモリ(28)と、
前記武器の前記位置およびその視線の方向を取得し、
前記第1パラメータおよび第2パラメータがそれぞれの取得した位置、および方向の函数である値で置換された、第1の式および第2の式を用いることにより、前記表面SCおよび発射体またはビームの軌跡の間、あるいは表面SCおよび表面SDの間の交点を検出し、
少なくとも1つの交点が検出された場合、衝突点の存在を表示し、その逆の場合、射撃の非存在を表示するようにプログラムされた電子コンピュター(30)とを備えるを特徴とする請求項4〜6のいずれか1項に記載の方法を実行するようになっている目標装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−68410(P2013−68410A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−202150(P2012−202150)
【出願日】平成24年9月14日(2012.9.14)
【出願人】(510132347)コミサリア ア レネルジ アトミク エ オウ エネルジ アルタナティヴ (51)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2012−202150(P2012−202150)
【出願日】平成24年9月14日(2012.9.14)
【出願人】(510132347)コミサリア ア レネルジ アトミク エ オウ エネルジ アルタナティヴ (51)
【Fターム(参考)】
[ Back to top ]