
移動端末、システム及び方法
【課題】適切なリルートタイミングを検知する移動端末、システム及び方法を提供すること。
【解決手段】本発明の一態様は、自律航法機能を有する移動端末であって、地図情報における当該移動端末のユーザの出発地から目的地までのルート上に当該移動端末の現在位置をマップマッチングする地図アプリケーション部と、当該移動端末の動きを検知し、前記ユーザの動きを示すセンサ情報を提供する測定部と、前記センサ情報に基づき基準位置からの当該移動端末の移動量を算出し、該算出された移動量と前記基準位置とに基づき当該移動端末の現在位置を算出する位置算出部と、前記算出された当該移動端末の現在位置と前記基準位置との間の第1距離と、前記マップマッチングされた当該移動端末の現在位置と前記基準位置との間の第2距離とを比較し、前記第1距離が前記第2距離より十分大きいと判断した場合、前記地図アプリケーション部にルートの再検索を要求するリルート検知部とを有する移動端末に関する。
【解決手段】本発明の一態様は、自律航法機能を有する移動端末であって、地図情報における当該移動端末のユーザの出発地から目的地までのルート上に当該移動端末の現在位置をマップマッチングする地図アプリケーション部と、当該移動端末の動きを検知し、前記ユーザの動きを示すセンサ情報を提供する測定部と、前記センサ情報に基づき基準位置からの当該移動端末の移動量を算出し、該算出された移動量と前記基準位置とに基づき当該移動端末の現在位置を算出する位置算出部と、前記算出された当該移動端末の現在位置と前記基準位置との間の第1距離と、前記マップマッチングされた当該移動端末の現在位置と前記基準位置との間の第2距離とを比較し、前記第1距離が前記第2距離より十分大きいと判断した場合、前記地図アプリケーション部にルートの再検索を要求するリルート検知部とを有する移動端末に関する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自律航法機能を有する移動端末に関する。
【背景技術】
【0002】
近年、移動端末における基地局測位の高精度化や、WLAN(Wireless Local Area Network)測位などの新たな測位技術の出現により、インドア環境における位置情報サービスの発展が期待されている。
【0003】
新たなインドア測位技術の1つとして、加速度センサや地磁気センサなどの各種センサ情報を利用した自律航法技術が注目されている。しかしながら、センサのみによる測位は誤差が蓄積していくという問題があり、精度向上のためにはセンサ以外の情報を利用して定期的に位置補正を行うことが重要となる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−47114号公報
【特許文献2】特開2006−337114号公報
【特許文献3】特開2006−242703号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の移動端末向けの自律航法では、加速度センサや地磁気センサ、ジャイロセンサなどを利用して初期位置からの移動量を推定して位置座標を算出することによって、移動端末を測位していた。
【0006】
しかしながら、センサによる自律航法で算出した位置推定は誤差が蓄積していくため、誤差蓄積による誤った位置推定なのか、あるいは実際にユーザが設定ルートと異なるルートを歩行しているかの判別が困難であった。
【0007】
上記問題点に鑑み、本発明の課題は、適切なリルートタイミングを検知する移動端末、システム及び方法を提供することである。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明の一態様は、自律航法機能を有する移動端末であって、地図情報における当該移動端末のユーザの出発地から目的地までのルート上に当該移動端末の現在位置をマップマッチングする地図アプリケーション部と、当該移動端末の動きを検知し、前記ユーザの動きを示すセンサ情報を提供する測定部と、前記センサ情報に基づき基準位置からの当該移動端末の移動量を算出し、該算出された移動量と前記基準位置とに基づき当該移動端末の現在位置を算出する位置算出部と、前記算出された当該移動端末の現在位置と前記基準位置との間の第1距離と、前記マップマッチングされた当該移動端末の現在位置と前記基準位置との間の第2距離とを比較し、前記第1距離が前記第2距離より十分大きいと判断した場合、前記地図アプリケーション部にルートの再検索を要求するリルート検知部とを有する移動端末に関する。
【0009】
本発明の他の態様は、自律航法機能を有する移動端末と、前記移動端末と通信接続されるサーバとを有するシステムであって、前記サーバは、地図情報における前記移動端末のユーザの出発地から目的地までのルート上に前記移動端末の現在位置をマップマッチングし、前記マップマッチングした前記ルート上の位置を前記移動端末に通知し、前記移動端末は、当該移動端末の動きを検知し、前記ユーザの動きを示すセンサ情報を提供する測定部と、前記センサ情報に基づき基準位置からの当該移動端末の移動量を算出し、該算出された移動量と前記基準位置とに基づき当該移動端末の現在位置を算出する位置算出部と、前記算出された当該移動端末の現在位置と前記基準位置との間の第1距離と、前記マップマッチングされた当該移動端末の現在位置と前記基準位置との間の第2距離とを比較し、前記第1距離が前記第2距離より十分大きいと判断した場合、前記地図アプリケーション部にルートの再検索を要求するリルート検知部とを有するシステムに関する。
【0010】
本発明のさらなる他の態様は、自律航法機能を有する移動端末で使用される方法であって、地図情報における当該移動端末のユーザの出発地から目的地までのルート上に当該移動端末の現在位置をマップマッチングするステップと、当該移動端末の動きを検知し、前記ユーザの動きを示すセンサ情報を提供するステップと、前記センサ情報に基づき基準位置からの当該移動端末の移動量を算出し、該算出された移動量と前記基準位置とに基づき当該移動端末の現在位置を算出するステップと、前記算出された当該移動端末の現在位置と前記基準位置との間の第1距離と、前記マップマッチングされた当該移動端末の現在位置と前記基準位置との間の第2距離とを比較し、前記第1距離が前記第2距離より十分大きいと判断した場合、ルートの再検索を実行するステップとを有する方法に関する。
【発明の効果】
【0011】
本発明によると、適切なリルートタイミングを検知する移動端末、システム及び方法を提供することができる。
【図面の簡単な説明】
【0012】
【図1】図1は、本発明の一実施例による移動端末の一例となる機能構成を示す。
【図2】図2は、本発明の一実施例による移動端末における一例となる自律航法処理を示すフローチャートである。
【図3】図3は、本発明の一実施例によるリルート検知処理を示すフローチャートである。
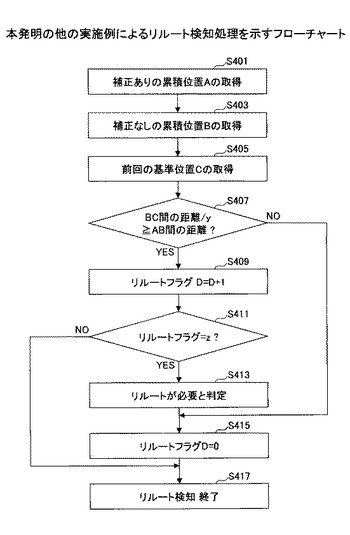
【図4】図4は、本発明の他の実施例によるリルート検知処理を示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、図面に基づいて本発明の各実施例を説明する。
【0014】
本発明の各実施例による移動端末は、ユーザが入力した出発地から目的地までの設定されたルート上にマップマッチングされた移動端末の位置情報と、自律航法機能によって測定されたセンサ情報から算出された移動端末の(マップマッチングされていない)位置情報との2つの位置情報を保持及び比較することによって、適切なリルートタイミングを検知する。
【0015】
まず、図1を参照して、本発明の一実施例による移動端末の構成を説明する。
【0016】
本実施例による移動端末は、典型的には、携帯電話端末やスマートフォンなどの携帯情報端末であり、端末内に搭載されたアプリケーションを利用して、又はネットワーク(図示しない)を介し通信可能な外部の装置からの情報を利用して移動端末の位置を取得可能な携帯情報端末である。移動端末は、典型的には、補助記憶装置、メモリ装置、CPU、通信装置、表示装置、入力装置、測定装置などの各種ハードウェアリソースの1以上から構成される。補助記憶装置は、ハードディスクやフラッシュメモリなどから構成され、後述される各種処理を実現するプログラムやデータを格納する。メモリ装置は、RAM(Random Access Memory)などから構成され、プログラムの起動指示があった場合に、補助記憶装置からプログラムを読み出して格納する。CPUは、情報を処理するプロセッサとして機能し、メモリ装置に格納されたプログラムに従って後述される各種機能を実現する。通信装置は、ネットワークを介しサーバなどの他の装置と有線及び/又は無線接続するための各種通信回路から構成される。本実施例による通信装置はさらに、GPS(Global Positioning System)機能を実現するための受信回路を有する。表示装置は、ディスプレイなどから構成され、ネットワークを介し受信したコンテンツやプログラムによるGUI(Graphical User Interface)等を表示する。入力装置は、典型的には、操作ボタン、キーボード、マウス等で構成され、移動端末のユーザが様々な操作命令を入力するのに用いられる。測定装置は、自律航法機能を実現するための移動端末の動きを測定するための加速度センサ、地磁気センサ、ジャイロセンサなどの各種センサから構成される。なお、本発明による移動端末は、上述したハードウェア構成に限定されるものでなく、後述する各種機能を実現可能な回路等の他の何れか適切なハードウェア構成を有してもよい。
【0017】
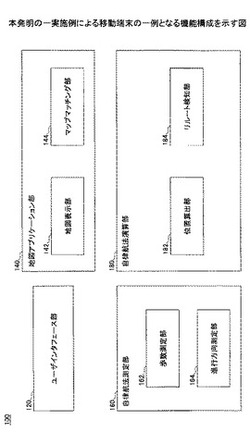
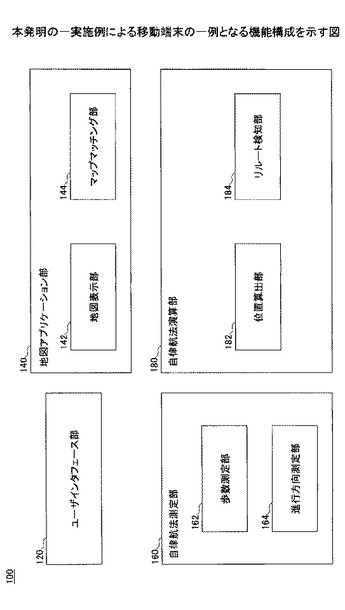
図1は、本発明の一実施例による移動端末の一例となる機能構成を示す。図1において、移動端末100は、ユーザインタフェース部120と、地図アプリケーション部140と、自律航法測定部160と、自律航法演算部180とを有する。
【0018】
ユーザインタフェース部120は、入力装置を介しユーザが出発地と目的地を入力すると、入力された出発地と目的地とに関する位置情報を地図アプリケーション部140に提供する。典型的には、出発地は現在位置であり、GPS機能を用いて取得した移動端末100の現在位置に関する位置情報が地図アプリケーション部140に提供されてもよい。また、目的地は、ユーザにより入力された目的地の住所などであってもよいし、あるいは地図アプリケーション部140により表示された地図情報上の指定された地点、他のアプリケーションを介し指定された建物、施設、店舗などであってもよく、これら指定された位置から導出された位置情報が地図アプリケーション部140に提供されてもよい。
【0019】
地図アプリケーション部140は、ユーザインタフェース部120から出発地と目的地とに関する位置情報を受信すると、指定された出発地から目的地までのルートを設定すると共に、自律航法演算部180により算出された移動端末100の現在位置がルート上から乖離した場合、何れか適切なマップマッチング技術を用いて移動端末100の現在位置をルート上に補正する。
【0020】
図1に示されるように、地図アプリケーション部140は、地図表示部142とマップマッチング部144とを有する。
【0021】
地図表示部142は、ユーザインタフェース部120から提供された出発地と目的地との位置情報に基づき、出発地から目的地までのルートを設定し、設定したルートをマップマッチング部144に提供する。このルートの設定は、地図アプリケーション部140に格納されている地図情報を参照して、何れか適当なナビゲーションアルゴリズムを利用して出発地から目的地までのルートを決定することにより行われてもよい。典型的には、出発地から目的地までの最短ルートが選択されるが、これに限定されるものでなく、何れか適当な方法によりルートを設定するようにしてもよい。出発地から目的地までのルートが設定されると、地図表示部142は、設定されたルートをユーザに表示するための表示用地図データを生成する。なお、出発地から目的地まで複数のルートの候補が存在する場合、これら複数のルートの1つを表示用のルートとして設定して当該ルートに関する表示用地図データを生成してユーザインタフェース部120に提供すると共に、他のルートについては、表示用地図データは生成しないが候補ルートとしてマップマッチング部144に提供するようにしてもよい。
【0022】
マップマッチング部144は、何れか適切なマップマッチング技術を利用して、センサ情報に基づき自律航法演算部180により算出された移動端末100の現在位置を補正する。すなわち、マップマッチング部144は、地図表示部142から設定されたルートを受信すると、地図アプリケーション部140に格納されている地図情報を参照して、移動端末100の設定ルートを確認する。その後、マップマッチング部144は、センサ情報に基づき自律航法演算部180により算出された移動端末100の現在位置を定期的に受信し、受信した現在位置が設定ルートから所定の距離だけ乖離しているか判定する。受信した現在位置が設定ルートから所定の距離だけ乖離している場合、マップマッチング部144は、何れか適切なマップマッチング技術を利用して、移動端末100の現在位置を設定ルート上にマップすることによって現在位置を補正する。現在位置の補正後、マップマッチング部144は、補正された現在位置を自律航法演算部180に提供する。
【0023】
本実施例では、地図アプリケーション部140は移動端末100内に設けられたが、本発明はこれに限定されるものでない。他の実施例では、地図アプリケーション部140は、移動端末100が通信可能な外部のサーバに設けられてもよい。すなわち、ユーザインタフェース部120がユーザから入力された出発地と目的地とに関する位置情報をサーバに送信すると、サーバは上述した処理を実行して、移動端末100の設定ルートを決定し、定期的に送信される移動端末100により算出された現在位置を補正すると、補正後の現在位置を移動端末100に返すようにしてもよい。
【0024】
自律航法測定部160は、移動端末100の動きに関する各種データを測定し、測定したデータをセンサ情報として自律航法演算部180に提供する。図1に示されるように、自律航法測定部160は、歩数測定部162と、進行方向測定部164とを有する。
【0025】
歩数測定部162は、移動端末100を携帯するユーザの歩行をモニタし、ユーザが歩いた歩数を測定する。歩数測定部162は、典型的には、加速度センサにより実現可能であるが、これに限定されることなく他の何れか適切なユーザの歩数又は歩行距離を測定可能な装置により実現されてもよい。
【0026】
進行方向測定部164は、移動端末100を携帯するユーザの歩行をモニタし、ユーザが歩く進行方向を検知する。進行方向測定部164は、典型的には、地磁気センサやジャイロセンサにより実現可能であるが、これに限定されることなく他の何れか適切なユーザの進行方向を測定可能な装置により実現されてもよい。
【0027】
このようにして、自律航法測定部160は、歩数測定部162により測定されたユーザの歩数と進行方向測定部164により測定されたユーザの進行方向とをセンサ情報として自律航法演算部180に提供する。このセンサ情報は、自律航法演算部180などからの要求に応答して、ユーザが歩行を開始することに応答して、又は定期的など何れか適切なタイミングで自律航法演算部180に提供されるようにしてもよい。
【0028】
自律航法演算部180は、自律航法測定部160により測定された移動端末100のユーザの歩数及び進行方向などのセンサ情報を取得すると、このセンサ情報に基づき移動端末100の現在位置を算出し、算出した現在位置を地図アプリケーション部140に提供する。上述したように、算出した現在位置が移動端末100の設定ルートから乖離している場合、地図アプリケーション部140は、受信した自律航法演算部180により算出された現在位置を設定ルート上にマップマッチングし、マップマッチングされた現在位置を自律航法演算部180に返す。このマップマッチングにより補正された現在位置を受信すると、自律航法演算部180は、当該マップマッチングにより補正された現在位置と自ら算出した現在位置とを比較し、ユーザが設定ルートと異なるルートにルート変更(リルート)したか判断する。ユーザがリルートしたと判断すると、自律航法演算部180は、地図アプリケーション部140にルートを再検索するよう要求する。
【0029】
図1に示されるように、自律航法演算部180は、位置算出部182と、リルート検知部184とを有する。
【0030】
位置算出部182は、自律航法測定部160から提供されたセンサ情報に基づき自律航法中の移動端末100の移動量を算出し、現在設定されている基準地点にこの算出した移動量を加えることによって現在位置を決定し、決定した現在位置の緯度及び経度などの位置情報を地図アプリケーション部140に提供する。具体的には、位置算出部182は、センサ情報における測定されたユーザの歩数と進行方向とに基づき、測定された歩数に設定されているユーザの歩幅(典型的には、入力されたユーザの身長から1mを差し引いた値)を掛け合わせることによって歩行距離を導出し、導出した歩行距離と測定された進行方向とに基づき基準地点からの移動量を算出する。位置算出部182は、初期的にはこの基準地点として設定されたルートの出発点の緯度及び経度を設定し、ユーザの歩数から推定される歩行距離と進行方向の推移とに基づき基準地点からの移動距離及び移動方向を求める。
【0031】
上述したように、位置算出部182により算出された移動端末100の現在位置が設定されたルートから乖離すると、地図アプリケーション部140は、マップマッチングを実行し、算出された現在位置を設定されたルート上に補正し、補正後の現在位置Aを自律航法演算部180に通知する。本実施例では、自律航法演算部180が補正後の現在位置Aを受信すると、位置算出部182は、補正後の現在位置Aによる補正をすぐにはせず、算出した補正前の現在位置Bに基づき以降の移動端末100の位置を算出し続ける。
【0032】
リルート検知部184は、位置算出部182により算出された現在位置Bが測位誤差を有するものであり、地図アプリケーション部140により設定ルート上にマップマッチングされた位置Aに補正されるべきであるか、又はユーザが設定されたルートと異なるルートにルート変更したため、位置算出部182により算出された現在位置Bが地図アプリケーション部140により設定ルート上にマップマッチングされた位置Aに補正されるべきでないか判断する。位置算出部182により算出された現在位置Bが設定ルート上の位置Aに補正されるべきである場合、すなわち、現在位置Bが自律航法による誤差を含むものである場合、リルート検出部184は、位置算出部182に現在位置Bを設定ルート上の位置Aに補正するよう指示する。他方、位置算出部182により算出された現在位置Bが設定ルート上の位置Aに補正されるべきでない場合、すなわち、ユーザが設定ルートと異なるルートを歩行している場合、リルート検出部184は、地図アプリケーション部140に設定ルートの再検索を要求する。上記リルート要否判断に関する具体的処理は、図3及び4を参照して以降において詳述される。
【0033】
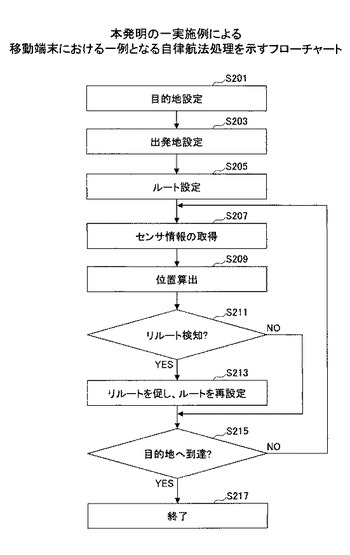
次に、図2を参照して、本発明の一実施例による移動端末の一例となる動作を説明する。図2は、本発明の一実施例による移動端末における一例となる自律航法処理を示すフローチャートである。
【0034】
図2に示されるように、ステップS201において、ユーザが移動端末100の入力装置などを介しユーザインタフェース部120に目的地を設定する。上述したように、ユーザは、目的地の住所などを入力することによって目的地を設定してもよい。また、ユーザは、地図アプリケーション部140により移動端末100の表示装置上に表示された地図情報上の地点を指定することによって目的地を設定してもよい。また、ユーザは、他のアプリケーションを介し表示された建物、施設、店舗などを指定することによって目的地を設定してもよい。
【0035】
ステップS203において、ユーザが移動端末100の入力装置などを介しユーザインタフェース部120に出発地を設定する。典型的には、出発地は、デフォルトとして現在位置に設定される。他方、ユーザが現在位置以外の出発地を移動端末100の入力装置などを介し設定することも可能である。例えば、ユーザは、出発地の住所などを入力することによって出発地を設定してもよい。また、ユーザは、地図アプリケーション部140により移動端末100の表示装置上に表示された地図情報上の地点を指定することによって出発地を設定してもよい。また、ユーザは、他のアプリケーションを介し表示された建物、施設、店舗などを指定することによって出発地を設定してもよい。
【0036】
ステップS205において、地図アプリケーション部140は、設定された出発地と目的地とに対して何れか適切なナビゲーション方法を利用してルートを決定する。
【0037】
ステップS207において、自律航法演算部180は、自律航法測定部160により測定されたセンサ情報を取得する。
【0038】
ステップS209において、自律航法演算部180は、取得したセンサ情報に基づき移動端末100の現在位置Bを算出し、算出した現在位置Bを地図アプリケーション部140に提供する。地図アプリケーション部140は、何れか適切なマップマッチング方法を利用して、受信した現在位置が設定されたルート上にマップマッチングされるべきか判断する。例えば、地図アプリケーション部140は、受信した現在位置が設定されたルートから所定の距離以上乖離しているか判断し、所定の距離以上乖離している場合、受信した現在位置から最短となる設定ルート上の地点に移動端末100の現在位置をマップマッチングするようにしてもよい。現在位置の補正後、地図アプリケーション部140は、補正後の現在位置Aを自律航法演算部180に通知する。地図アプリケーション部140から補正後の現在位置Aを受信すると、自律航法演算部180は、算出した現在位置Bを補正後の現在位置Aによりすぐには補正せず、補正後の現在位置Aを保持する。
【0039】
ステップS211において、自律航法演算部180は、設定ルートが変更されるべきか判断する。すなわち、自律航法演算部180は、算出した現在位置Bが地図アプリケーション部140により設定ルート上にマップマッチングされた現在位置Aに補正されるべきか、又はユーザが設定ルートと異なるルートにルート変更したため、地図アプリケーション部140に新たなルート設定を要求すべきか判断する。ステップS211の具体的な処理は、図3及び4を参照して以降において詳述される。
【0040】
設定ルートを変更する必要がないと判断した場合(S211:N)、自律航法演算部180は、算出した現在位置Bをマップマッチングされた現在位置Aに補正し、ステップS215において補正後の現在位置Aが目的地であるか判断する。その後、自律航法演算部180は、補正後の現在位置Aに基づき以降の位置算出を行う。
【0041】
他方、設定ルートを変更する必要があると判断した場合(S211:Y)、自律航法演算部180は、ユーザが設定ルートと異なるルートを歩行していると判断し、当該フローはステップS213に移行する。
【0042】
ステップS213において、自律航法演算部180は、地図アプリケーション部140に現在位置Bに基づき設定ルートを再検索するよう要求する。当該再検索要求に応答して、地図アプリケーション部140は、現在位置Bに基づき目的地までの新たなルートを再検索する。
【0043】
ステップS215において、自律航法演算部は、現在位置Bに基づきユーザが目的地に到達したか判定する。ユーザが目的地に到達したと判断した場合(S215:Y)、当該自律航法処理は終了する。他方、ユーザがまだ目的地に到達していない場合(S215:N)、当該フローはステップS207に戻り、自律航法処理を継続する。
【0044】
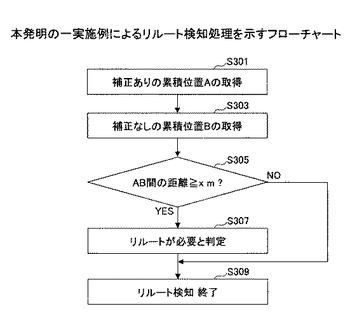
次に、図3を参照して、本発明の一実施例によるステップS211の自律航法演算部180におけるリルート検知処理をより詳細に説明する。図3は、本発明の一実施例によるリルート検知処理を示すフローチャートである。
【0045】
図3に示されるように、ステップS301において、リルート検知部184は、ステップS209において位置算出部182が算出した現在位置Bに対して、地図アプリケーション部140がマップマッチングした設定ルート上の補正後の現在位置Aを取得する。
【0046】
ステップS303において、リルート検知部184は、位置検出部182が算出した現在位置Bを取得する。
【0047】
ステップS305において、リルート検知部184は、補正後の現在位置Aと補正前の現在位置Bとの間の距離ABを算出し、算出した距離ABが所定の閾値xメートル以上であるか判定する。算出した距離ABが閾値xメートル以上である場合(ステップS305:Y)、リルート検知部184は、ステップS307において、ユーザが設定ルートと異なるルートを歩行していると判断し、地図アプリケーション部140にルートの再検索を要求することを決定する。他方、算出した距離ABが閾値xメートル未満である場合(ステップS305:N)、リルート検知部184は、ユーザは設定ルートを歩行していると判断し、当該フローはステップS309に移行する。
【0048】
ステップS309において、リルート検知部184は、当該リルート検知処理を終了する。
【0049】
次に、図4を参照して、本発明の他の実施例によるステップS211の自律航法演算部180におけるリルート検知処理の他の実施例を説明する。図4は、本発明の他の実施例によるリルート検知処理を示すフローチャートである。本実施例は、移動端末100が地下街などで使用されるケースなどに好適なものである。一般に地下街では格子状に通路が設けられ、出発地から目的地までに複数の利用可能なルートが存在するケースが多い。このため、ユーザが設定ルートとは異なるルート、例えば、設定ルートの近傍の並行するルートなどにルート変更した場合、当初の設定ルートへの誤ったマップマッチングが行われる可能性がある。本実施例は、携帯電話などの移動端末に特有であるこのような誤ったマップマッチングを回避するのに効果的である。
【0050】
図4に示されるように、ステップS401において、リルート検知部184は、ステップS209において位置算出部182が算出した現在位置Bに対して、地図アプリケーション部140がマップマッチングした設定ルート上の補正後の現在位置Aを取得する。
【0051】
ステップS403において、リルート検知部184は、位置検出部182が算出した現在位置Bを取得する。
【0052】
ステップS405において、リルート検知部184は、位置算出部182による現在位置Bの算出の基礎となる前回の基準地点の位置Cを取得する。
【0053】
ステップS407において、リルート検知部184は、基準位置Cと補正前の現在位置Bとの間の距離BC、すなわち、自律航法測定部140からのセンサ情報から導出される移動端末100の移動量を算出する。さらに、リルート検知部184は、基準位置Cと補正後の現在位置Aとの間の距離AC、すなわち、地図アプリケーション部140が認識する移動端末100の移動量を算出する。リルート検知部184は、距離BCと距離ACとを比較し、距離BCを1より大きな何れかの値yにより除した値が距離AB以上であるか判定することによって、距離BCが距離ABより十分大きなものであるか判断する。これは、ユーザが設定ルートを直角に曲がって他のルートに入った場合、地図アプリケーション部140による設定ルート上へのマップマッチング適用後の位置Aはほぼ変化しないというマップマッチングの特性を考慮したものである。このような特性に基づき、マップマッチング適用後の距離ACは、ユーザの実際の移動量BCと比較してかなり小さなものになると考えられる。なお、上述した除数yは、ユーザによるルート変更を誤検出しないような何れか適切な値に設定される。
【0054】
距離BCが距離ABより十分大きい場合(S407:Y)、リルート検知部184は、ステップS409においてリルート要と判断された回数を示すリルートフラグDをインクリメントし、さらにステップS411においてインクリメントされたリルートフラグDの値が所定の閾値zに到達したか判定する。これは、ステップS407における1回の判定のみによってリルート要と判断すると誤判定となる可能性があるため、一定の回数連続してリルート要と判断された場合に、地図アプリケーション部140にルート再検索を要求することにする。なお、閾値zは、誤判定が生じる確率が十分低くなるような値に設定され、例えば、5回などであってもよい。
【0055】
他方、距離BCが距離ABより十分大きくない場合(S407:N)、リルート検知部184は、ユーザが設定ルートを歩行していると判断し、当該フローはステップS415に移行する。
【0056】
ステップS411において、インクリメントされたリルートフラグDが閾値z未満である場合(S411:N)、リルート検知部184は、現時点ではリルート不要と判断し、リルートフラグDを保持したまま、リルート検知処理を終了する。他方、インクリメントされたリルートフラグDが閾値zに等しい場合(S411:Y)、リルート検知部184は、ユーザは設定ルートと異なるルートに移行し、地図アプリケーション部140によるルート再検索が必要であると判断する。リルート検知部184は、ステップS213において地図アプリケーション部140にルート再検索を要求する。
【0057】
ステップS413において、リルート検知部184は、リルートフラグDをリセットし、当該リルート検知処理を終了する。
【0058】
なお、上述した実施例では、距離BCが距離ABより十分大きなものであるか判断することによって、リルート検知部184はユーザが設定ルートと異なるルートを歩行していると判断した。しかしながら、本発明はこれに限定されるものでない。他の実施例では、設定ルートの方位とユーザの進行方向とがほぼ直交している場合には、リルート検知部184は、ユーザが設定ルートと異なるルートを歩行していると判断してもよい。さらなる実施例では、距離と進行方向との双方を考慮して、リルート検知部184は、ユーザが設定ルートと異なるルートを歩行していると判断してもよい。
【0059】
以上、本発明の実施例について詳述したが、本発明は上述した特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。
【符号の説明】
【0060】
100 移動端末
120 ユーザインタフェース部
140 地図アプリケーション部
160 自律航法測定部
180 自律航法演算部
182 位置算出部
184 リルート検知部
【技術分野】
【0001】
本発明は、自律航法機能を有する移動端末に関する。
【背景技術】
【0002】
近年、移動端末における基地局測位の高精度化や、WLAN(Wireless Local Area Network)測位などの新たな測位技術の出現により、インドア環境における位置情報サービスの発展が期待されている。
【0003】
新たなインドア測位技術の1つとして、加速度センサや地磁気センサなどの各種センサ情報を利用した自律航法技術が注目されている。しかしながら、センサのみによる測位は誤差が蓄積していくという問題があり、精度向上のためにはセンサ以外の情報を利用して定期的に位置補正を行うことが重要となる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−47114号公報
【特許文献2】特開2006−337114号公報
【特許文献3】特開2006−242703号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の移動端末向けの自律航法では、加速度センサや地磁気センサ、ジャイロセンサなどを利用して初期位置からの移動量を推定して位置座標を算出することによって、移動端末を測位していた。
【0006】
しかしながら、センサによる自律航法で算出した位置推定は誤差が蓄積していくため、誤差蓄積による誤った位置推定なのか、あるいは実際にユーザが設定ルートと異なるルートを歩行しているかの判別が困難であった。
【0007】
上記問題点に鑑み、本発明の課題は、適切なリルートタイミングを検知する移動端末、システム及び方法を提供することである。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明の一態様は、自律航法機能を有する移動端末であって、地図情報における当該移動端末のユーザの出発地から目的地までのルート上に当該移動端末の現在位置をマップマッチングする地図アプリケーション部と、当該移動端末の動きを検知し、前記ユーザの動きを示すセンサ情報を提供する測定部と、前記センサ情報に基づき基準位置からの当該移動端末の移動量を算出し、該算出された移動量と前記基準位置とに基づき当該移動端末の現在位置を算出する位置算出部と、前記算出された当該移動端末の現在位置と前記基準位置との間の第1距離と、前記マップマッチングされた当該移動端末の現在位置と前記基準位置との間の第2距離とを比較し、前記第1距離が前記第2距離より十分大きいと判断した場合、前記地図アプリケーション部にルートの再検索を要求するリルート検知部とを有する移動端末に関する。
【0009】
本発明の他の態様は、自律航法機能を有する移動端末と、前記移動端末と通信接続されるサーバとを有するシステムであって、前記サーバは、地図情報における前記移動端末のユーザの出発地から目的地までのルート上に前記移動端末の現在位置をマップマッチングし、前記マップマッチングした前記ルート上の位置を前記移動端末に通知し、前記移動端末は、当該移動端末の動きを検知し、前記ユーザの動きを示すセンサ情報を提供する測定部と、前記センサ情報に基づき基準位置からの当該移動端末の移動量を算出し、該算出された移動量と前記基準位置とに基づき当該移動端末の現在位置を算出する位置算出部と、前記算出された当該移動端末の現在位置と前記基準位置との間の第1距離と、前記マップマッチングされた当該移動端末の現在位置と前記基準位置との間の第2距離とを比較し、前記第1距離が前記第2距離より十分大きいと判断した場合、前記地図アプリケーション部にルートの再検索を要求するリルート検知部とを有するシステムに関する。
【0010】
本発明のさらなる他の態様は、自律航法機能を有する移動端末で使用される方法であって、地図情報における当該移動端末のユーザの出発地から目的地までのルート上に当該移動端末の現在位置をマップマッチングするステップと、当該移動端末の動きを検知し、前記ユーザの動きを示すセンサ情報を提供するステップと、前記センサ情報に基づき基準位置からの当該移動端末の移動量を算出し、該算出された移動量と前記基準位置とに基づき当該移動端末の現在位置を算出するステップと、前記算出された当該移動端末の現在位置と前記基準位置との間の第1距離と、前記マップマッチングされた当該移動端末の現在位置と前記基準位置との間の第2距離とを比較し、前記第1距離が前記第2距離より十分大きいと判断した場合、ルートの再検索を実行するステップとを有する方法に関する。
【発明の効果】
【0011】
本発明によると、適切なリルートタイミングを検知する移動端末、システム及び方法を提供することができる。
【図面の簡単な説明】
【0012】
【図1】図1は、本発明の一実施例による移動端末の一例となる機能構成を示す。
【図2】図2は、本発明の一実施例による移動端末における一例となる自律航法処理を示すフローチャートである。
【図3】図3は、本発明の一実施例によるリルート検知処理を示すフローチャートである。
【図4】図4は、本発明の他の実施例によるリルート検知処理を示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、図面に基づいて本発明の各実施例を説明する。
【0014】
本発明の各実施例による移動端末は、ユーザが入力した出発地から目的地までの設定されたルート上にマップマッチングされた移動端末の位置情報と、自律航法機能によって測定されたセンサ情報から算出された移動端末の(マップマッチングされていない)位置情報との2つの位置情報を保持及び比較することによって、適切なリルートタイミングを検知する。
【0015】
まず、図1を参照して、本発明の一実施例による移動端末の構成を説明する。
【0016】
本実施例による移動端末は、典型的には、携帯電話端末やスマートフォンなどの携帯情報端末であり、端末内に搭載されたアプリケーションを利用して、又はネットワーク(図示しない)を介し通信可能な外部の装置からの情報を利用して移動端末の位置を取得可能な携帯情報端末である。移動端末は、典型的には、補助記憶装置、メモリ装置、CPU、通信装置、表示装置、入力装置、測定装置などの各種ハードウェアリソースの1以上から構成される。補助記憶装置は、ハードディスクやフラッシュメモリなどから構成され、後述される各種処理を実現するプログラムやデータを格納する。メモリ装置は、RAM(Random Access Memory)などから構成され、プログラムの起動指示があった場合に、補助記憶装置からプログラムを読み出して格納する。CPUは、情報を処理するプロセッサとして機能し、メモリ装置に格納されたプログラムに従って後述される各種機能を実現する。通信装置は、ネットワークを介しサーバなどの他の装置と有線及び/又は無線接続するための各種通信回路から構成される。本実施例による通信装置はさらに、GPS(Global Positioning System)機能を実現するための受信回路を有する。表示装置は、ディスプレイなどから構成され、ネットワークを介し受信したコンテンツやプログラムによるGUI(Graphical User Interface)等を表示する。入力装置は、典型的には、操作ボタン、キーボード、マウス等で構成され、移動端末のユーザが様々な操作命令を入力するのに用いられる。測定装置は、自律航法機能を実現するための移動端末の動きを測定するための加速度センサ、地磁気センサ、ジャイロセンサなどの各種センサから構成される。なお、本発明による移動端末は、上述したハードウェア構成に限定されるものでなく、後述する各種機能を実現可能な回路等の他の何れか適切なハードウェア構成を有してもよい。
【0017】
図1は、本発明の一実施例による移動端末の一例となる機能構成を示す。図1において、移動端末100は、ユーザインタフェース部120と、地図アプリケーション部140と、自律航法測定部160と、自律航法演算部180とを有する。
【0018】
ユーザインタフェース部120は、入力装置を介しユーザが出発地と目的地を入力すると、入力された出発地と目的地とに関する位置情報を地図アプリケーション部140に提供する。典型的には、出発地は現在位置であり、GPS機能を用いて取得した移動端末100の現在位置に関する位置情報が地図アプリケーション部140に提供されてもよい。また、目的地は、ユーザにより入力された目的地の住所などであってもよいし、あるいは地図アプリケーション部140により表示された地図情報上の指定された地点、他のアプリケーションを介し指定された建物、施設、店舗などであってもよく、これら指定された位置から導出された位置情報が地図アプリケーション部140に提供されてもよい。
【0019】
地図アプリケーション部140は、ユーザインタフェース部120から出発地と目的地とに関する位置情報を受信すると、指定された出発地から目的地までのルートを設定すると共に、自律航法演算部180により算出された移動端末100の現在位置がルート上から乖離した場合、何れか適切なマップマッチング技術を用いて移動端末100の現在位置をルート上に補正する。
【0020】
図1に示されるように、地図アプリケーション部140は、地図表示部142とマップマッチング部144とを有する。
【0021】
地図表示部142は、ユーザインタフェース部120から提供された出発地と目的地との位置情報に基づき、出発地から目的地までのルートを設定し、設定したルートをマップマッチング部144に提供する。このルートの設定は、地図アプリケーション部140に格納されている地図情報を参照して、何れか適当なナビゲーションアルゴリズムを利用して出発地から目的地までのルートを決定することにより行われてもよい。典型的には、出発地から目的地までの最短ルートが選択されるが、これに限定されるものでなく、何れか適当な方法によりルートを設定するようにしてもよい。出発地から目的地までのルートが設定されると、地図表示部142は、設定されたルートをユーザに表示するための表示用地図データを生成する。なお、出発地から目的地まで複数のルートの候補が存在する場合、これら複数のルートの1つを表示用のルートとして設定して当該ルートに関する表示用地図データを生成してユーザインタフェース部120に提供すると共に、他のルートについては、表示用地図データは生成しないが候補ルートとしてマップマッチング部144に提供するようにしてもよい。
【0022】
マップマッチング部144は、何れか適切なマップマッチング技術を利用して、センサ情報に基づき自律航法演算部180により算出された移動端末100の現在位置を補正する。すなわち、マップマッチング部144は、地図表示部142から設定されたルートを受信すると、地図アプリケーション部140に格納されている地図情報を参照して、移動端末100の設定ルートを確認する。その後、マップマッチング部144は、センサ情報に基づき自律航法演算部180により算出された移動端末100の現在位置を定期的に受信し、受信した現在位置が設定ルートから所定の距離だけ乖離しているか判定する。受信した現在位置が設定ルートから所定の距離だけ乖離している場合、マップマッチング部144は、何れか適切なマップマッチング技術を利用して、移動端末100の現在位置を設定ルート上にマップすることによって現在位置を補正する。現在位置の補正後、マップマッチング部144は、補正された現在位置を自律航法演算部180に提供する。
【0023】
本実施例では、地図アプリケーション部140は移動端末100内に設けられたが、本発明はこれに限定されるものでない。他の実施例では、地図アプリケーション部140は、移動端末100が通信可能な外部のサーバに設けられてもよい。すなわち、ユーザインタフェース部120がユーザから入力された出発地と目的地とに関する位置情報をサーバに送信すると、サーバは上述した処理を実行して、移動端末100の設定ルートを決定し、定期的に送信される移動端末100により算出された現在位置を補正すると、補正後の現在位置を移動端末100に返すようにしてもよい。
【0024】
自律航法測定部160は、移動端末100の動きに関する各種データを測定し、測定したデータをセンサ情報として自律航法演算部180に提供する。図1に示されるように、自律航法測定部160は、歩数測定部162と、進行方向測定部164とを有する。
【0025】
歩数測定部162は、移動端末100を携帯するユーザの歩行をモニタし、ユーザが歩いた歩数を測定する。歩数測定部162は、典型的には、加速度センサにより実現可能であるが、これに限定されることなく他の何れか適切なユーザの歩数又は歩行距離を測定可能な装置により実現されてもよい。
【0026】
進行方向測定部164は、移動端末100を携帯するユーザの歩行をモニタし、ユーザが歩く進行方向を検知する。進行方向測定部164は、典型的には、地磁気センサやジャイロセンサにより実現可能であるが、これに限定されることなく他の何れか適切なユーザの進行方向を測定可能な装置により実現されてもよい。
【0027】
このようにして、自律航法測定部160は、歩数測定部162により測定されたユーザの歩数と進行方向測定部164により測定されたユーザの進行方向とをセンサ情報として自律航法演算部180に提供する。このセンサ情報は、自律航法演算部180などからの要求に応答して、ユーザが歩行を開始することに応答して、又は定期的など何れか適切なタイミングで自律航法演算部180に提供されるようにしてもよい。
【0028】
自律航法演算部180は、自律航法測定部160により測定された移動端末100のユーザの歩数及び進行方向などのセンサ情報を取得すると、このセンサ情報に基づき移動端末100の現在位置を算出し、算出した現在位置を地図アプリケーション部140に提供する。上述したように、算出した現在位置が移動端末100の設定ルートから乖離している場合、地図アプリケーション部140は、受信した自律航法演算部180により算出された現在位置を設定ルート上にマップマッチングし、マップマッチングされた現在位置を自律航法演算部180に返す。このマップマッチングにより補正された現在位置を受信すると、自律航法演算部180は、当該マップマッチングにより補正された現在位置と自ら算出した現在位置とを比較し、ユーザが設定ルートと異なるルートにルート変更(リルート)したか判断する。ユーザがリルートしたと判断すると、自律航法演算部180は、地図アプリケーション部140にルートを再検索するよう要求する。
【0029】
図1に示されるように、自律航法演算部180は、位置算出部182と、リルート検知部184とを有する。
【0030】
位置算出部182は、自律航法測定部160から提供されたセンサ情報に基づき自律航法中の移動端末100の移動量を算出し、現在設定されている基準地点にこの算出した移動量を加えることによって現在位置を決定し、決定した現在位置の緯度及び経度などの位置情報を地図アプリケーション部140に提供する。具体的には、位置算出部182は、センサ情報における測定されたユーザの歩数と進行方向とに基づき、測定された歩数に設定されているユーザの歩幅(典型的には、入力されたユーザの身長から1mを差し引いた値)を掛け合わせることによって歩行距離を導出し、導出した歩行距離と測定された進行方向とに基づき基準地点からの移動量を算出する。位置算出部182は、初期的にはこの基準地点として設定されたルートの出発点の緯度及び経度を設定し、ユーザの歩数から推定される歩行距離と進行方向の推移とに基づき基準地点からの移動距離及び移動方向を求める。
【0031】
上述したように、位置算出部182により算出された移動端末100の現在位置が設定されたルートから乖離すると、地図アプリケーション部140は、マップマッチングを実行し、算出された現在位置を設定されたルート上に補正し、補正後の現在位置Aを自律航法演算部180に通知する。本実施例では、自律航法演算部180が補正後の現在位置Aを受信すると、位置算出部182は、補正後の現在位置Aによる補正をすぐにはせず、算出した補正前の現在位置Bに基づき以降の移動端末100の位置を算出し続ける。
【0032】
リルート検知部184は、位置算出部182により算出された現在位置Bが測位誤差を有するものであり、地図アプリケーション部140により設定ルート上にマップマッチングされた位置Aに補正されるべきであるか、又はユーザが設定されたルートと異なるルートにルート変更したため、位置算出部182により算出された現在位置Bが地図アプリケーション部140により設定ルート上にマップマッチングされた位置Aに補正されるべきでないか判断する。位置算出部182により算出された現在位置Bが設定ルート上の位置Aに補正されるべきである場合、すなわち、現在位置Bが自律航法による誤差を含むものである場合、リルート検出部184は、位置算出部182に現在位置Bを設定ルート上の位置Aに補正するよう指示する。他方、位置算出部182により算出された現在位置Bが設定ルート上の位置Aに補正されるべきでない場合、すなわち、ユーザが設定ルートと異なるルートを歩行している場合、リルート検出部184は、地図アプリケーション部140に設定ルートの再検索を要求する。上記リルート要否判断に関する具体的処理は、図3及び4を参照して以降において詳述される。
【0033】
次に、図2を参照して、本発明の一実施例による移動端末の一例となる動作を説明する。図2は、本発明の一実施例による移動端末における一例となる自律航法処理を示すフローチャートである。
【0034】
図2に示されるように、ステップS201において、ユーザが移動端末100の入力装置などを介しユーザインタフェース部120に目的地を設定する。上述したように、ユーザは、目的地の住所などを入力することによって目的地を設定してもよい。また、ユーザは、地図アプリケーション部140により移動端末100の表示装置上に表示された地図情報上の地点を指定することによって目的地を設定してもよい。また、ユーザは、他のアプリケーションを介し表示された建物、施設、店舗などを指定することによって目的地を設定してもよい。
【0035】
ステップS203において、ユーザが移動端末100の入力装置などを介しユーザインタフェース部120に出発地を設定する。典型的には、出発地は、デフォルトとして現在位置に設定される。他方、ユーザが現在位置以外の出発地を移動端末100の入力装置などを介し設定することも可能である。例えば、ユーザは、出発地の住所などを入力することによって出発地を設定してもよい。また、ユーザは、地図アプリケーション部140により移動端末100の表示装置上に表示された地図情報上の地点を指定することによって出発地を設定してもよい。また、ユーザは、他のアプリケーションを介し表示された建物、施設、店舗などを指定することによって出発地を設定してもよい。
【0036】
ステップS205において、地図アプリケーション部140は、設定された出発地と目的地とに対して何れか適切なナビゲーション方法を利用してルートを決定する。
【0037】
ステップS207において、自律航法演算部180は、自律航法測定部160により測定されたセンサ情報を取得する。
【0038】
ステップS209において、自律航法演算部180は、取得したセンサ情報に基づき移動端末100の現在位置Bを算出し、算出した現在位置Bを地図アプリケーション部140に提供する。地図アプリケーション部140は、何れか適切なマップマッチング方法を利用して、受信した現在位置が設定されたルート上にマップマッチングされるべきか判断する。例えば、地図アプリケーション部140は、受信した現在位置が設定されたルートから所定の距離以上乖離しているか判断し、所定の距離以上乖離している場合、受信した現在位置から最短となる設定ルート上の地点に移動端末100の現在位置をマップマッチングするようにしてもよい。現在位置の補正後、地図アプリケーション部140は、補正後の現在位置Aを自律航法演算部180に通知する。地図アプリケーション部140から補正後の現在位置Aを受信すると、自律航法演算部180は、算出した現在位置Bを補正後の現在位置Aによりすぐには補正せず、補正後の現在位置Aを保持する。
【0039】
ステップS211において、自律航法演算部180は、設定ルートが変更されるべきか判断する。すなわち、自律航法演算部180は、算出した現在位置Bが地図アプリケーション部140により設定ルート上にマップマッチングされた現在位置Aに補正されるべきか、又はユーザが設定ルートと異なるルートにルート変更したため、地図アプリケーション部140に新たなルート設定を要求すべきか判断する。ステップS211の具体的な処理は、図3及び4を参照して以降において詳述される。
【0040】
設定ルートを変更する必要がないと判断した場合(S211:N)、自律航法演算部180は、算出した現在位置Bをマップマッチングされた現在位置Aに補正し、ステップS215において補正後の現在位置Aが目的地であるか判断する。その後、自律航法演算部180は、補正後の現在位置Aに基づき以降の位置算出を行う。
【0041】
他方、設定ルートを変更する必要があると判断した場合(S211:Y)、自律航法演算部180は、ユーザが設定ルートと異なるルートを歩行していると判断し、当該フローはステップS213に移行する。
【0042】
ステップS213において、自律航法演算部180は、地図アプリケーション部140に現在位置Bに基づき設定ルートを再検索するよう要求する。当該再検索要求に応答して、地図アプリケーション部140は、現在位置Bに基づき目的地までの新たなルートを再検索する。
【0043】
ステップS215において、自律航法演算部は、現在位置Bに基づきユーザが目的地に到達したか判定する。ユーザが目的地に到達したと判断した場合(S215:Y)、当該自律航法処理は終了する。他方、ユーザがまだ目的地に到達していない場合(S215:N)、当該フローはステップS207に戻り、自律航法処理を継続する。
【0044】
次に、図3を参照して、本発明の一実施例によるステップS211の自律航法演算部180におけるリルート検知処理をより詳細に説明する。図3は、本発明の一実施例によるリルート検知処理を示すフローチャートである。
【0045】
図3に示されるように、ステップS301において、リルート検知部184は、ステップS209において位置算出部182が算出した現在位置Bに対して、地図アプリケーション部140がマップマッチングした設定ルート上の補正後の現在位置Aを取得する。
【0046】
ステップS303において、リルート検知部184は、位置検出部182が算出した現在位置Bを取得する。
【0047】
ステップS305において、リルート検知部184は、補正後の現在位置Aと補正前の現在位置Bとの間の距離ABを算出し、算出した距離ABが所定の閾値xメートル以上であるか判定する。算出した距離ABが閾値xメートル以上である場合(ステップS305:Y)、リルート検知部184は、ステップS307において、ユーザが設定ルートと異なるルートを歩行していると判断し、地図アプリケーション部140にルートの再検索を要求することを決定する。他方、算出した距離ABが閾値xメートル未満である場合(ステップS305:N)、リルート検知部184は、ユーザは設定ルートを歩行していると判断し、当該フローはステップS309に移行する。
【0048】
ステップS309において、リルート検知部184は、当該リルート検知処理を終了する。
【0049】
次に、図4を参照して、本発明の他の実施例によるステップS211の自律航法演算部180におけるリルート検知処理の他の実施例を説明する。図4は、本発明の他の実施例によるリルート検知処理を示すフローチャートである。本実施例は、移動端末100が地下街などで使用されるケースなどに好適なものである。一般に地下街では格子状に通路が設けられ、出発地から目的地までに複数の利用可能なルートが存在するケースが多い。このため、ユーザが設定ルートとは異なるルート、例えば、設定ルートの近傍の並行するルートなどにルート変更した場合、当初の設定ルートへの誤ったマップマッチングが行われる可能性がある。本実施例は、携帯電話などの移動端末に特有であるこのような誤ったマップマッチングを回避するのに効果的である。
【0050】
図4に示されるように、ステップS401において、リルート検知部184は、ステップS209において位置算出部182が算出した現在位置Bに対して、地図アプリケーション部140がマップマッチングした設定ルート上の補正後の現在位置Aを取得する。
【0051】
ステップS403において、リルート検知部184は、位置検出部182が算出した現在位置Bを取得する。
【0052】
ステップS405において、リルート検知部184は、位置算出部182による現在位置Bの算出の基礎となる前回の基準地点の位置Cを取得する。
【0053】
ステップS407において、リルート検知部184は、基準位置Cと補正前の現在位置Bとの間の距離BC、すなわち、自律航法測定部140からのセンサ情報から導出される移動端末100の移動量を算出する。さらに、リルート検知部184は、基準位置Cと補正後の現在位置Aとの間の距離AC、すなわち、地図アプリケーション部140が認識する移動端末100の移動量を算出する。リルート検知部184は、距離BCと距離ACとを比較し、距離BCを1より大きな何れかの値yにより除した値が距離AB以上であるか判定することによって、距離BCが距離ABより十分大きなものであるか判断する。これは、ユーザが設定ルートを直角に曲がって他のルートに入った場合、地図アプリケーション部140による設定ルート上へのマップマッチング適用後の位置Aはほぼ変化しないというマップマッチングの特性を考慮したものである。このような特性に基づき、マップマッチング適用後の距離ACは、ユーザの実際の移動量BCと比較してかなり小さなものになると考えられる。なお、上述した除数yは、ユーザによるルート変更を誤検出しないような何れか適切な値に設定される。
【0054】
距離BCが距離ABより十分大きい場合(S407:Y)、リルート検知部184は、ステップS409においてリルート要と判断された回数を示すリルートフラグDをインクリメントし、さらにステップS411においてインクリメントされたリルートフラグDの値が所定の閾値zに到達したか判定する。これは、ステップS407における1回の判定のみによってリルート要と判断すると誤判定となる可能性があるため、一定の回数連続してリルート要と判断された場合に、地図アプリケーション部140にルート再検索を要求することにする。なお、閾値zは、誤判定が生じる確率が十分低くなるような値に設定され、例えば、5回などであってもよい。
【0055】
他方、距離BCが距離ABより十分大きくない場合(S407:N)、リルート検知部184は、ユーザが設定ルートを歩行していると判断し、当該フローはステップS415に移行する。
【0056】
ステップS411において、インクリメントされたリルートフラグDが閾値z未満である場合(S411:N)、リルート検知部184は、現時点ではリルート不要と判断し、リルートフラグDを保持したまま、リルート検知処理を終了する。他方、インクリメントされたリルートフラグDが閾値zに等しい場合(S411:Y)、リルート検知部184は、ユーザは設定ルートと異なるルートに移行し、地図アプリケーション部140によるルート再検索が必要であると判断する。リルート検知部184は、ステップS213において地図アプリケーション部140にルート再検索を要求する。
【0057】
ステップS413において、リルート検知部184は、リルートフラグDをリセットし、当該リルート検知処理を終了する。
【0058】
なお、上述した実施例では、距離BCが距離ABより十分大きなものであるか判断することによって、リルート検知部184はユーザが設定ルートと異なるルートを歩行していると判断した。しかしながら、本発明はこれに限定されるものでない。他の実施例では、設定ルートの方位とユーザの進行方向とがほぼ直交している場合には、リルート検知部184は、ユーザが設定ルートと異なるルートを歩行していると判断してもよい。さらなる実施例では、距離と進行方向との双方を考慮して、リルート検知部184は、ユーザが設定ルートと異なるルートを歩行していると判断してもよい。
【0059】
以上、本発明の実施例について詳述したが、本発明は上述した特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。
【符号の説明】
【0060】
100 移動端末
120 ユーザインタフェース部
140 地図アプリケーション部
160 自律航法測定部
180 自律航法演算部
182 位置算出部
184 リルート検知部
【特許請求の範囲】
【請求項1】
自律航法機能を有する移動端末であって、
地図情報における当該移動端末のユーザの出発地から目的地までのルート上に当該移動端末の現在位置をマップマッチングする地図アプリケーション部と、
当該移動端末の動きを検知し、前記ユーザの動きを示すセンサ情報を提供する測定部と、
前記センサ情報に基づき基準位置からの当該移動端末の移動量を算出し、該算出された移動量と前記基準位置とに基づき当該移動端末の現在位置を算出する位置算出部と、
前記算出された当該移動端末の現在位置と前記基準位置との間の第1距離と、前記マップマッチングされた当該移動端末の現在位置と前記基準位置との間の第2距離とを比較し、前記第1距離が前記第2距離より十分大きいと判断した場合、前記地図アプリケーション部にルートの再検索を要求するリルート検知部と、
を有する移動端末。
【請求項2】
前記地図アプリケーション部は、前記位置算出部により算出された当該移動端末の現在位置が前記ルートから所定の距離だけ乖離した場合、前記算出された当該移動端末の現在位置から最短となる前記ルート上の地点にマップマッチングする、請求項1記載の移動端末。
【請求項3】
前記リルート検知部は、前記第1距離を所定の除数により除した値が前記第2距離以上である場合、前記第1距離が前記第2距離より十分大きいと判断する、請求項2記載の移動端末。
【請求項4】
前記リルート検知部は、連続して所定の判定回数だけ前記第1距離を所定の除数により除した値が前記第2距離以上であると判定した場合、前記第1距離が前記第2距離より十分大きいと判断する、請求項3記載の移動端末。
【請求項5】
前記地図アプリケーション部は、前記リルート検知部からルートの再検索を要求されると、前記算出された当該移動端末の現在位置から前記目的地までのルートを検出する、請求項1記載の移動端末。
【請求項6】
前記測定部は、
当該移動端末のユーザの歩数を検出する歩数検出部と、
当該移動端末の進行方向を検出する進行方向検出部と、
を有し、
前記位置算出部は、前記歩数検出部により検出された前記基準位置からのユーザの歩数と前記進行方向検出部により検出された前記基準位置からのユーザの進行方向とに基づき、当該移動端末の移動量を算出する、請求項1記載の移動端末。
【請求項7】
自律航法機能を有する移動端末と、
前記移動端末と通信接続されるサーバと、
を有するシステムであって、
前記サーバは、地図情報における前記移動端末のユーザの出発地から目的地までのルート上に前記移動端末の現在位置をマップマッチングし、前記マップマッチングした前記ルート上の位置を前記移動端末に通知し、
前記移動端末は、
当該移動端末の動きを検知し、前記ユーザの動きを示すセンサ情報を提供する測定部と、
前記センサ情報に基づき基準位置からの当該移動端末の移動量を算出し、該算出された移動量と前記基準位置とに基づき当該移動端末の現在位置を算出する位置算出部と、
前記算出された当該移動端末の現在位置と前記基準位置との間の第1距離と、前記マップマッチングされた当該移動端末の現在位置と前記基準位置との間の第2距離とを比較し、前記第1距離が前記第2距離より十分大きいと判断した場合、前記地図アプリケーション部にルートの再検索を要求するリルート検知部と、
を有するシステム。
【請求項8】
自律航法機能を有する移動端末で使用される方法であって、
地図情報における当該移動端末のユーザの出発地から目的地までのルート上に当該移動端末の現在位置をマップマッチングするステップと、
当該移動端末の動きを検知し、前記ユーザの動きを示すセンサ情報を提供するステップと、
前記センサ情報に基づき基準位置からの当該移動端末の移動量を算出し、該算出された移動量と前記基準位置とに基づき当該移動端末の現在位置を算出するステップと、
前記算出された当該移動端末の現在位置と前記基準位置との間の第1距離と、前記マップマッチングされた当該移動端末の現在位置と前記基準位置との間の第2距離とを比較し、前記第1距離が前記第2距離より十分大きいと判断した場合、ルートの再検索を実行するステップと、
を有する方法。
【請求項1】
自律航法機能を有する移動端末であって、
地図情報における当該移動端末のユーザの出発地から目的地までのルート上に当該移動端末の現在位置をマップマッチングする地図アプリケーション部と、
当該移動端末の動きを検知し、前記ユーザの動きを示すセンサ情報を提供する測定部と、
前記センサ情報に基づき基準位置からの当該移動端末の移動量を算出し、該算出された移動量と前記基準位置とに基づき当該移動端末の現在位置を算出する位置算出部と、
前記算出された当該移動端末の現在位置と前記基準位置との間の第1距離と、前記マップマッチングされた当該移動端末の現在位置と前記基準位置との間の第2距離とを比較し、前記第1距離が前記第2距離より十分大きいと判断した場合、前記地図アプリケーション部にルートの再検索を要求するリルート検知部と、
を有する移動端末。
【請求項2】
前記地図アプリケーション部は、前記位置算出部により算出された当該移動端末の現在位置が前記ルートから所定の距離だけ乖離した場合、前記算出された当該移動端末の現在位置から最短となる前記ルート上の地点にマップマッチングする、請求項1記載の移動端末。
【請求項3】
前記リルート検知部は、前記第1距離を所定の除数により除した値が前記第2距離以上である場合、前記第1距離が前記第2距離より十分大きいと判断する、請求項2記載の移動端末。
【請求項4】
前記リルート検知部は、連続して所定の判定回数だけ前記第1距離を所定の除数により除した値が前記第2距離以上であると判定した場合、前記第1距離が前記第2距離より十分大きいと判断する、請求項3記載の移動端末。
【請求項5】
前記地図アプリケーション部は、前記リルート検知部からルートの再検索を要求されると、前記算出された当該移動端末の現在位置から前記目的地までのルートを検出する、請求項1記載の移動端末。
【請求項6】
前記測定部は、
当該移動端末のユーザの歩数を検出する歩数検出部と、
当該移動端末の進行方向を検出する進行方向検出部と、
を有し、
前記位置算出部は、前記歩数検出部により検出された前記基準位置からのユーザの歩数と前記進行方向検出部により検出された前記基準位置からのユーザの進行方向とに基づき、当該移動端末の移動量を算出する、請求項1記載の移動端末。
【請求項7】
自律航法機能を有する移動端末と、
前記移動端末と通信接続されるサーバと、
を有するシステムであって、
前記サーバは、地図情報における前記移動端末のユーザの出発地から目的地までのルート上に前記移動端末の現在位置をマップマッチングし、前記マップマッチングした前記ルート上の位置を前記移動端末に通知し、
前記移動端末は、
当該移動端末の動きを検知し、前記ユーザの動きを示すセンサ情報を提供する測定部と、
前記センサ情報に基づき基準位置からの当該移動端末の移動量を算出し、該算出された移動量と前記基準位置とに基づき当該移動端末の現在位置を算出する位置算出部と、
前記算出された当該移動端末の現在位置と前記基準位置との間の第1距離と、前記マップマッチングされた当該移動端末の現在位置と前記基準位置との間の第2距離とを比較し、前記第1距離が前記第2距離より十分大きいと判断した場合、前記地図アプリケーション部にルートの再検索を要求するリルート検知部と、
を有するシステム。
【請求項8】
自律航法機能を有する移動端末で使用される方法であって、
地図情報における当該移動端末のユーザの出発地から目的地までのルート上に当該移動端末の現在位置をマップマッチングするステップと、
当該移動端末の動きを検知し、前記ユーザの動きを示すセンサ情報を提供するステップと、
前記センサ情報に基づき基準位置からの当該移動端末の移動量を算出し、該算出された移動量と前記基準位置とに基づき当該移動端末の現在位置を算出するステップと、
前記算出された当該移動端末の現在位置と前記基準位置との間の第1距離と、前記マップマッチングされた当該移動端末の現在位置と前記基準位置との間の第2距離とを比較し、前記第1距離が前記第2距離より十分大きいと判断した場合、ルートの再検索を実行するステップと、
を有する方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−117977(P2012−117977A)
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願番号】特願2010−269611(P2010−269611)
【出願日】平成22年12月2日(2010.12.2)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【Fターム(参考)】
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願日】平成22年12月2日(2010.12.2)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【Fターム(参考)】
[ Back to top ]