
移動端末、現在位置表示方法、および現在位置表示プログラム

【課題】外部から測位用電波を正確に受信できない環境下においても精度良く現在位置を取得することができる移動端末を提供する。
【解決手段】移動端末100は、表示部110Aと、地図を表示するための地図データと、位置座標に対応付けられた目印とを記憶する記憶部113と、移動端末の予想現在位置を取得する位置取得手段102Aと、移動端末の移動方向を取得する方向取得手段107Aと、記憶部を参照して、予想現在位置と移動方向とに基づき、予想現在位置の周辺に位置する目印を抽出する抽出手段106Cと、表示部に、抽出手段によって抽出された目印を選択可能に表示させる表示制御手段106Dと、目印の選択を受け付ける操作部とを備える。表示制御手段は、記憶部を参照して、表示部に、選択された目印を中心とした地図を表示させる。
【解決手段】移動端末100は、表示部110Aと、地図を表示するための地図データと、位置座標に対応付けられた目印とを記憶する記憶部113と、移動端末の予想現在位置を取得する位置取得手段102Aと、移動端末の移動方向を取得する方向取得手段107Aと、記憶部を参照して、予想現在位置と移動方向とに基づき、予想現在位置の周辺に位置する目印を抽出する抽出手段106Cと、表示部に、抽出手段によって抽出された目印を選択可能に表示させる表示制御手段106Dと、目印の選択を受け付ける操作部とを備える。表示制御手段は、記憶部を参照して、表示部に、選択された目印を中心とした地図を表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、外部からの測位用電波に基づいて自身の現在位置を取得することができる移動端末、移動端末における現在位置表示方法、および現在位置表示プログラムに関し、特に外部からの測位用電波を正確に受信できない環境下においても精度良く現在位置を取得することができる移動端末、移動端末における現在位置表示方法、および現在位置表示プログラムに関する。
【背景技術】
【0002】
自身の現在位置を取得する機能、たとえばGPS(Global Positioning System)衛星からの測位用電波を受信することによって自身の現在位置を特定するGPS機能を備える移動端末が開発されている。
【0003】
しかしながら、上記の移動端末は、地下などのように移動端末が測位用電波を受信できない環境においては、現在位置を取得することができない。また、ビルの間などにように測位用電波がビルで反射してから移動端末に到達する環境、すなわち衛星から移動端末までの電波到達距離(時間)の誤差が大きい環境(いわゆるマルチパス環境)においては、測位用電波に基づいて取得される現在位置の誤差が大きくなる。
【0004】
そこで、測位用電波に基づいて現在位置を取得できない環境や、測位用電波に基づいて取得した現在位置の誤差が大きい環境に対応できる、自律航法が可能な移動端末が提案されている。
【0005】
たとえば、特開平2−93681号公報(特許文献1)には、車両用経路誘導装置に対してオペレータが位置設定を行う車両位置設定方法が開示されている。特開平2−93681号公報(特許文献1)によると、車両位置設定方法は、上記の位置設定が道路の交差点名に基づいて行われる。また、上記の位置設定が、建物ごとにその名称または居住者名が記載されている住宅地図を用いることにより行われる。
【0006】
また、特開平11−64015号公報(特許文献2)には、ナビゲーションシステムが開示されている。特開平11−64015号公報(特許文献2)によると、周辺目印名称表示選択部が、地図とともに表示すべき周辺目印名称の地図番号を決定する。次に、この地図番号と入力装置部より入力された使用者が要求している周辺目印名称の種別と縮尺レベルの情報から、表示する地図データと使用者が要求する種別や縮尺レベルに適切に対応した周辺目印名称を、周辺目印名称記憶装置部より検索して読み出して制御部に出力する。そしてこの制御部で、現在位置、地図データ、周辺目印名称を合成し、表示装置部に表示させる。
【0007】
また、特開2007−205718号公報(特許文献3)には、歩行者ナビゲーション装置が開示されている。特開2007−205718号公報(特許文献3)によると、歩行者ナビゲーション装置は、歩行者の現在位置に最も近い基準位置データを含み、目的地に最も近い移動先位置データを含むデータセットを検索するデータセット検索プログラムと、データセットに含まれる座標の周辺を切り出した大縮尺地図を表示する大縮尺地図表示プログラムと、現在位置に最も近い基準位置を表示する基準位置表示プログラムと、目的地に最も近い移動先位置を表示する移動先位置表示プログラムと、現在位置から目的地までの移動経路を表示する移動経路表示プログラムと、目的地に最も近い移動先位置の近傍にある目標地物を表示する目標地物表示プログラムと、目標地物から目的地に最も近い移動先位置までの相対位置を表示する移動先相対位置表示プログラムとを備える。
【0008】
また、地磁気センサや加速度センサを利用することによって、現在位置を取得する移動端末なども提案されている。たとえば、特開2003−172633号公報(特許文献4)には、集積化方位センサが開示されている。特開2003−172633号公報(特許文献4)によると、集積化方位センサは、重力加速度を検出する加速度センサと、地磁気を検出する磁気センサと、加速度センサからの加速度情報および磁気センサからの磁気情報を演算処理する演算処理部とを備える。加速度センサは、ガラス台に固定される支持体と、重り部と、この重り部を可動自在に支持体に支持させる梁等から構成される。加速度センサを構成する重り部上の所定位置には、磁気センサおよび演算処理部がそれぞれ配置されている。
【0009】
また、特開2007−108326号公報(特許文献5)には、携帯型地図表示装置が開示されている。特開2007−108326号公報(特許文献5)によると、正面方位算出部は端末の正面方位を算出する。進行方位算出部は、移動方向検出部からの携帯機器移動方向情報と、正面方位算出部からの端末正面方位情報とから、携帯機器の進行方向がどの方位に向かって進行しているのかの情報を得る。選択部は、端末移動状態検出部からの情報をもとに、携帯機器が歩行者によって保持されていると判断されているときは正面方位算出部から得た方位情報を選択し、携帯機器が車載状態であると判断されるときは進行方位検出部からの方位情報を選択して計算部に渡す。計算部は、記憶部に保存されている地図情報を読み出すとともに、選択部からの表示方位情報およびGPSが取得する緯度経度情報をもとに地図情報を処理し、表示部に送る。
【特許文献1】特開平2−93681号公報
【特許文献2】特開平11−64015号公報
【特許文献3】特開2007−205718号公報
【特許文献4】特開2003−172633号公報
【特許文献5】特開2007−108326号公報
【特許文献6】特開2004−226170号公報
【特許文献7】特開2000−205888号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
移動端末は、自律航法の際、最後に測定された現在位置と当該現在位置からの相対位置とに基づいて新たな現在位置を演算する。そのため、移動端末は、自律航法を開始する際に正確な現在位置を取得する必要がある。しかしながら、上記の従来の移動端末においては、自律航法を開始する際に、移動端末の正確な現在位置を取得することが困難であった。特に、初めて訪れる場所において、移動端末のユーザが、移動端末に自分の現在位置や現在位置付近に関する情報を入力することは困難である。その結果、たとえば、上記の従来の移動端末においては、不正確な現在位置を初期位置として自律航法を行わざるを得なかった。
【0011】
本発明はこのような問題点を解決するためになされたものであって、本発明の主たる目的は、外部から測位用電波を正確に受信できない環境下においても精度良く現在位置を取得することができる移動端末、移動端末における現在位置表示方法、および現在位置表示プログラムを提供することである。
【課題を解決するための手段】
【0012】
本発明の1つの局面に従うと、移動端末が提供される。移動端末は、表示部と、地図を表示するための地図データと、位置座標に対応付けられた目印とを記憶する記憶部と、移動端末の予想現在位置を取得する位置取得手段と、移動端末の移動方向を取得する方向取得手段と、記憶部を参照して、予想現在位置と移動方向とに基づき、予想現在位置の周辺に位置する目印を抽出する抽出手段と、表示部に、抽出手段によって抽出された目印を選択可能に表示させる表示制御手段と、目印の選択を受け付ける操作部とを備える。表示制御手段は、記憶部を参照して、表示部に、選択された目印を実質的に中心とした地図を表示させる。
【0013】
好ましくは、抽出手段は、記憶部を参照して、予想現在位置から所定距離以内であって、予想現在位置から移動方向の方向に位置する目印を抽出する。
【0014】
好ましくは、移動端末は、表示部と操作部とを含むタッチパネルをさらに備える。表示制御手段は、記憶部を参照して、表示部に、タッチパネルによって検知された接触位置に対応する地点を実質的に中心とした地図を表示させる。
【0015】
好ましくは、位置取得手段は、所定期間内に取得した複数の測定現在位置に基づいて予想現在位置を演算する。表示制御手段は、記憶部を参照して、表示部に、予想現在位置を実質的に中心とした地図を表示させる。移動端末は、複数の測定現在位置の偏差に関する値が所定値以上であるか否かを判断する判断手段をさらに備える。抽出手段は、複数の測定現在位置の偏差に関する値が所定値以上である場合に、記憶部を参照して、予想現在位置に基づき、予想現在位置の周辺に位置する目印を抽出する。
【0016】
好ましくは、移動端末は、目印が選択されない場合に、移動端末を移動させるように外部へ通知する通知手段をさらに備える。抽出手段は、方向取得手段が移動方向を取得した際に、記憶部を参照して、予想現在位置と移動方向とに基づき、予想現在位置の周辺に位置する目印を抽出し直す。
【0017】
好ましくは、判断手段は、移動端末の電源が投入されたとき、あるいは位置取得手段が第1の所定期間以上空けて測定現在位置を取得したときに、複数の測定現在位置の偏差に関する値が第1の所定値以上であるか否かを判断する。
【0018】
好ましくは、抽出手段は、目印が選択されない場合に、記憶部を参照して、目印を抽出したエリアよりも大きなエリアであって、かつ目印を抽出したエリアを包含するエリア内の目印を抽出し直す。
【0019】
好ましくは、移動端末は、目印が選択された場合であって、かつ接触位置が検知されない場合に、移動端末を他の移動方向へ移動させるように外部へ通知する通知手段をさらに備える。抽出手段は、記憶部を参照して、予想現在位置と他の移動方向とに基づき他の目印を抽出し直す。表示制御手段は、表示部に、抽出手段によって抽出された他の目印を選択可能に表示させる。表示制御手段は、記憶部を参照して、選択された目印と選択された他の目印の中間地点を中心とした地図を表示させる。
【0020】
この発明の別の局面に従うと、移動端末における現在位置表示方法が提供される。移動端末は、表示部と、地図を表示するための地図データと、位置座標に対応付けられた目印とを記憶する記憶部と、移動端末の予想現在位置を取得する位置取得手段と、移動端末の移動方向を取得する方向取得手段と、移動端末の各部を制御する制御部とを備える。現在位置表示方法は、制御部が、記憶部を参照して、予想現在位置と移動方向とに基づき、予想現在位置の周辺に位置する目印を抽出するステップと、制御部が、表示部に、抽出するステップにて抽出された目印を選択可能に表示させるステップと、制御部が、目印の選択を受け付けるステップと、制御部が、記憶部を参照して、表示部に、選択された目印を中心とした地図を表示させるステップとを備える。
【0021】
この発明の別の局面に従うと、移動端末に現在位置を表示させるための現在位置表示プログラムが提供される。移動端末は、表示部と、地図を表示するための地図データと、位置座標に対応付けられた目印とを記憶する記憶部と、移動端末の予想現在位置を取得する位置取得手段と、移動端末の移動方向を取得する方向取得手段と、移動端末の各部を制御する制御部とを備える。現在位置表示プログラムは、制御部に、記憶部を参照して、予想現在位置と移動方向とに基づき、予想現在位置の周辺に位置する目印を抽出するステップと、表示部に、抽出するステップにて抽出された目印を選択可能に表示させるステップと、目印の選択を受け付けるステップと、記憶部を参照して、表示部に、選択された目印を中心とした地図を表示させるステップとを実行させる。
【発明の効果】
【0022】
以上のように、この発明によれば、外部からの測位用電波を正確に受信できない環境下においても精度良く現在位置を取得することができる移動端末、移動端末における現在位置表示方法、および現在位置表示プログラムが実現される。
【発明を実施するための最良の形態】
【0023】
以下、図面に基づいて本発明の実施の形態について説明する。なお以下の説明では、同一の部品については同一の符号を付すものとし、当該部品の名称や機能が同一である場合には、当該部品についての詳細な説明は繰り返さない。
【0024】
「移動端末」は、移動端末自身の予想現在位置を取得する位置取得手段と、移動端末の移動方向を取得する方向取得手段とを備える情報機器である。「移動端末」は、ユーザによって持ち運ばれたり、車両などに搭載されたりする。より詳細には、「移動端末」は、たとえばGPS機能に代表される、外部からの測位用電波に基づいて移動端末の現在位置を取得するための機能と、地磁気センサや加速度センサに代表される移動端末の加速度を取得するための機能と、地図データを格納する記憶部とを有しており、表示部を介して移動端末自身の現在位置を地図上に表示することができる。具体的には、「移動端末」は、携帯電話やカーナビゲーション装置(Satellite navigation system)やPND(Personal Navigation Device)やノート型パーソナルコンピュータや電子辞書などによって実現される。
【0025】
<PND100の動作概要>
本実施の形態に係る移動端末の一例であるPNDにおける動作概要について説明する。まず、本実施の形態に係るPNDは、GPS衛星などからの測位用電波を受信して自身の現在位置を測定する。すなわち、PNDは、測位用電波に基づいて、測定現在位置を取得する。そして、PNDがマルチパス環境下にあるか否かを判断する。具体的には、PNDは、所定期間内に測位用電波に基づいて取得された複数の測定現在位置のバラツキが大きいか否かに基づいて、自身がマルチパス環境にあるか否かを判断する。
【0026】
PNDは、電源が投入された際に自身がマルチパス環境下にあるか否かを判断してもよいし、所定期間以上空けて測位用電波を取得した際に自身がマルチパス環境下にあるか否かを判断してもよい。また、PNDは、測位用電波を受信する度に自身がマルチパス環境下にあるか否かを判断してもよいし、ユーザから自律航法を行う旨の指令を受け付けた際に自身がマルチパス環境下にあるか否かを判断してもよい。
【0027】
PNDがマルチパス環境下にある場合には、PNDは所定期間内に取得した複数の測定現在位置に基づいて予想現在位置を演算する。そして、PNDは、PNDを保持しているユーザに対して一定量以上移動するよう通知する。たとえば、PNDは、2歩以上歩行するように、ユーザに指示する。ユーザが移動すると、PNDは自身の加速度を測定することによって自身の移動方向を取得する。PNDは、予想現在位置と移動方向とに基づいて、記憶部を参照して、予想現在位置から見て移動方向側に位置する目印を抽出し、当該目印を選択可能にリスト表示する。ここでの目印とは、たとえば、建物名や、店舗名や、交差点名などをいい、PNDが地図上におけるそれらの存在位置(地図データ上の位置座標)を取得することができる対象物(オブジェクト)をいう。
【0028】
このように、本実施の形態に係るPNDにおいては、PND(ユーザ)の移動方向側に位置する目印がリスト表示されるため、ユーザは容易に目印に対応する建物などを見つけることができる。つまり、ユーザは、PNDにおいて、容易に目印を選択することができる。そして、ユーザが目印を選択すると、PNDは、記憶部を参照して、表示部に当該目印が位置する地点を中心とした地図を表示する。
【0029】
PNDは、たとえば、表示部および操作部として機能するタッチパネルに、当該目印が位置する地点を中心とした地図を表示させる。そして、PNDは、ユーザによるタッチパネルへの接触を待ち受ける。ユーザが、スタイラスペンや自身の指などによって、タッチパネルに接触すると、PNDは地図データを参照して、タッチパネル上の接触位置に対応する地図上の地点を中心とした地図を表示する。
【0030】
このようにして、本実施の形態に係るPNDは、マルチパス環境においても正確な現在位置を取得することができ、その後の自律航法の精度を向上させることができる。特に、PNDは、ユーザに、ユーザが移動した方向の目印を選択させるため、ユーザはリスト表示された目印を容易に選択することができる。
【0031】
さらに、本実施の形態に係るPNDはユーザが選択した目印を中心とした地図を表示するため、ユーザが表示されている地図の中心に位置する建物さえも把握できない場合と比較して、ユーザが地図上における自身の現在位置を容易に認識することができる。その結果、ユーザは、タッチパネルへの接触動作などによって、PNDに正確な現在位置を容易に入力することができる。
【0032】
以下、このような動作を実現するための構成について詳述する。
<PND100のハードウェア構成>
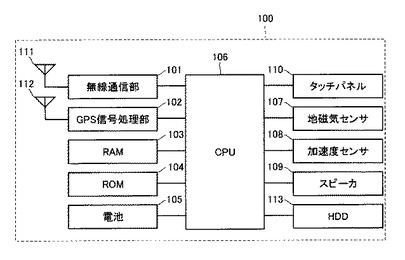
図1は、本実施の形態に係る移動端末の一例であるPND100のハードウェア構成を示す制御ブロック図である。図1に示すように、本実施の形態に係るPND100は、PND100の各部を制御するためのCPU(Central Processing Unit)106と、通信信号を送受信する通信アンテナ111と、通信信号とデータとを相互に変換する無線通信部101と、GPS衛星からの電波を受信する測位アンテナ112と、その電波に基づいて測定現在位置を取得するGPS信号処理部102と、測定現在位置や予想現在位置や目的地点などを格納するRAM(Random Access Memory)103と、制御プログラムなどを格納するROM(Read Only Memory)104と、PND100の各部に電力を供給する電池105と、PND100の向きを取得するための地磁気センサ107と、PND100に所定の座標系におけるPND100の加速度を取得するための加速度センサ108と、音声を出力するスピーカ109と、タッチパネル110と、各種データを記憶するHDD(Hard Disk Drive)113とを備える。
【0033】
無線通信部101は、CPU106からの通信データを通信信号に変換し、その通信信号を通信アンテナ111を介して発信する。無線通信部101は、通信アンテナ111を介して受信した通信信号を通信データに変換し、その通信データをCPU106に入力する。これによって、本実施の形態に係るPND100は、たとえばデジタル放送を受信したり、ネットワークを介してキャリア網やインターネット網に接続したりすることができる。
【0034】
GPS信号処理部102は、測位アンテナ112を介して受信した測位用電波に基づいて、PND100の現在位置を示す情報(測定現在位置)を生成し、その測定現在位置をCPU106に入力する。
【0035】
タッチパネル110は、画像を表示するモニタ(表示部)と、液晶ディスプレイに積層されるスイッチ(操作部)から構成される。なお、モニタ(表示部)は、液晶パネルやCRTから構成されるものであって、CPU106が出力したデータに基づいて、画像やテキストを表示する。スイッチ(操作部)は、スタイラスペンによる押下やキー入力操作などによってユーザから情報を受け付ける。
【0036】
HDD113は、地図データや現在位置に関するデータ(測定現在位置や予想現在位置)などを格納する。ただし、PND100は、地図データや現在位置に関するデータ(測定現在位置や予想現在位置)などを格納できればよく、HDD113などの固定ディスクを装備する構成でなくともよい。たとえば、PND100は、HDD113の代わりに、メモリインターフェイスを装備する構成であってもよい。そして、メモリインターフェイスに、SDカードなどの着脱自在なメモリが装着される構成であってもよい。
【0037】
<移動端末の機能構成>
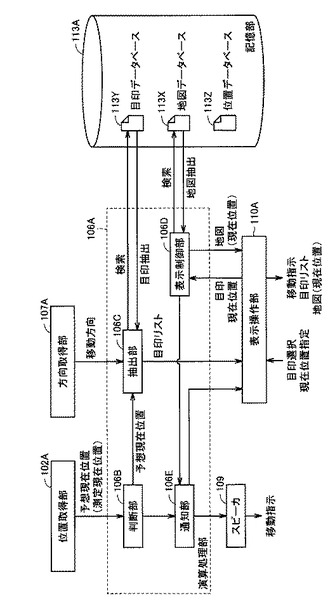
次に、本実施の形態に係る移動端末の機能構成について説明する。図2は、本実施の形態に係る移動端末の機能構成を示すブロック図である。図2に示すように、本実施の形態に係る移動端末は、位置取得部102Aと、方向取得部107Aと、判断部106Bと、抽出部106Cと、表示制御部106Dと、通知部106Eと、表示操作部110Aと、スピーカ109と、記憶部113Aとを含む。
【0038】
なお、図2に示される各機能は、CPU106がROM104やHDD113などに記憶されるプログラムを実行して図1に示される各ハードウェアを制御することによって発揮される機能である。本実施の形態においては、現在位置表示処理のための機能が移動端末などのコンピュータ上で実行されるソフトウェアによって実現される構成としているが、各ブロックの機能や各ステップの処理をソフトウェアによって実現する代わりに、各々を専用のハードウェア回路等によって実現してもよい。
【0039】
以下、各機能について説明する。まず、位置取得部102Aは、たとえば、測位アンテナ112やGPS信号処理部102やCPU106などによって実現される。位置取得部102Aは、複数のGPS衛星からの測位用電波を受信して、測定現在位置を取得する。位置取得部102Aは、所定期間内に取得された複数の測定現在位置に基づいて、移動端末自身の予想現在位置を取得する。
【0040】
より詳細には、位置取得部102Aは、所定期間内の複数の測定現在位置に関するX座標の平均値を予想現在位置のX座標とし、所定期間内の複数の測定現在位置に関するY座標の平均値を予想現在位置のY座標とする。そして、位置取得部102Aは、複数の測定現在位置や予想現在位置を、記憶部113Aの所定領域に格納する。これによって、位置取得部102Aは、所定期間内の複数の測定現在位置や予想現在位置を判断部106Bや抽出部106Cに受け渡す。
【0041】
方向取得部107Aは、たとえば、地磁気センサ107や加速度センサ108やCPU106などによって実現される。方向取得部107Aは、加速度センサ108にて取得される移動端末の座標系における加速度を、地磁気センサ107にて取得される移動端末の向き(姿勢)に基づいて絶対座標系(地図上の座標系)における加速度に修正する。
【0042】
これによって、移動端末は、自身の移動方向を把握することができる。そして、方向取得部107Aは、移動端末自身の移動方向に関するデータを記憶部113Aの所定の領域に格納する。これによって、方向取得部107Aは、移動端末自身の移動方向に関するデータを抽出部106Cに受け渡す。
【0043】
なお、地磁気センサ107および加速度センサ108(いわゆる6軸センサ)を利用した移動端末の移動方向の取得方法は、たとえば、特開2003−172633号公報(特許文献4)や、特開2007−108326号公報(特許文献5)などによって公知の技術となっているため、ここでは説明を繰り返さない。
【0044】
そして、表示操作部110Aは、たとえば、タッチパネル110によって実現される。表示操作部110Aは、目的地の設定を受け付ける。表示操作部110Aは、複数の目印を選択可能にリスト表示するとともに、ユーザによる目印の選択を受け付ける。すなわち、ユーザは、表示操作部110Aを介して、目印の選択命令を入力する。また、表示操作部110Aは、スタイラスペンやユーザの指によって、表示中の地図内における位置の指定を受け付ける。すなわち、ユーザは、表示操作部110Aに接触することによって、表示中の地図内における位置の指定を入力する。
【0045】
(記憶部113Aの機能構成)
記憶部113Aは、RAM103やROM104やHDD113などによって実現される。記憶部113Aは、地図を表示するための地図データや、移動端末の測定現在位置や、移動端末の予想現在位置などを格納する。具体的には、記憶部113Aは、地図を表示するための地図データを格納する地図データベース113Xや、目印に関するデータを格納する目印データベース113Yや、測定現在位置や予想現在位置などを格納する位置データベース113Zなどを記憶する。
【0046】
地図データベース113Xは、地図を構成する画像データのそれぞれを位置座標データに対応付けて記憶する。
【0047】
図3は、記憶部113Aに記憶されている目印データベース113Yのデータ構造を示すイメージ図である。図3に示すように、目印データベース113Yには、建物名や店舗名などの目印の名称と、目印の位置座標と、目印の重みと、リスト表示するか否かを示すフラグとが対応付けられて格納されている。ここで、目印の重みとは、ユーザにとっての見つけ易さや、看板の目立ち度合いや、周知度合いに応じて、予め目印毎にあるいは目印の属性(種類)毎に設定される数値である。
【0048】
図4は、記憶部113Aに記憶されている位置データベース113Zのデータ構造を示すイメージ図である。図4に示すように、位置データベース113Zは、所定期間内に位置取得部102Aによって取得された所定数の測定現在位置と、その所定数の測定現在位置に基づいて演算される予想現在位置とを逐次格納していく。このようにして、位置データベース113Zは、最新の所定数の測定現在位置と、最新の予想現在位置を格納する。
【0049】
具体的には、位置取得部102Aが取得した新たな測定現在位置によって、位置データベース113Zの最も古い測定現在位置が更新される。このとき、CPU106は、その新たな測定現在位置を含む所定数の測定現在位置に基づいて、新たな予想現在位置を計算する。そして、CPU106は、当該新たな予想現在位置によって位置データベース113Zの予想現在位置を更新する。
【0050】
位置データベース113Zは、測定現在位置毎に、その位置座標とその取得時間とを格納している。
【0051】
(演算処理部106Aの機能構成)
図2に戻って、判断部106Bや抽出部106Cや表示制御部106Dや通知部106Eは、演算処理部106Aに含まれる機能である。そして、演算処理部106Aは、たとえば、CPU106によって実現される。すなわち、演算処理部106Aが有する各機能は、CPU106が、ROM104やHDD113に記憶されたプログラムを一旦RAM103へと読み出して、RAM103からそのプログラムを読み出しながら順次実行することによって実現される。
【0052】
判断部106Bは、所定期間内に位置取得部102Aによって取得された測定現在位置のバラツキが大きいか否かを判断する。より詳細には、判断部106Bは、位置取得部102Aが所定期間内に取得した測定現在位置のバラツキを示す指標(偏差)が、第1の所定値以上であるか否かを判断する。具体的には、判断部106Bは、所定数の測定現在位置のx座標の標準偏差が第1の所定値以上であるか否か、あるいは、y座標の標準偏差が第1の所定値以上であるか否かを判断する。すなわち、判断部106Bは、移動端末が測定現在位置の誤差が大きいマルチパス環境下にあるか否かを判断する。
【0053】
なお、判断部106Bは、位置データベース113Zを参照して、移動端末の電源が投入されたとき、あるいは位置取得部102Aが第1の所定期間以上空いた後に測定現在位置を再取得したときに、複数の測定現在位置の偏差に関する値が第1の所定値以上であるか否かを判断する。すなわち、判断部106Bは、移動端末が地下から地上へ移動した際や、移動端末が屋内から屋外へ移動した際などに、移動端末がマルチパス環境下にあるか否かを判断する。
【0054】
抽出部106Cは、測定現在位置のバラツキが大きい場合に、記憶部113Aを参照して、位置取得部102Aによって取得された予想現在位置と方向取得部107Aによって取得された移動方向とに基づいて、予想現在位置の周辺に位置する目印を抽出する。より詳細には、抽出部106Cは、位置取得部102Aが所定期間内に取得した測定現在位置のバラツキを示す指標(偏差)が、所定値以上である場合に、位置データベース113Zの予想現在位置と目印データベース113Yとに基づいて、予想現在位置から所定距離以内に位置する目印を抽出する。
【0055】
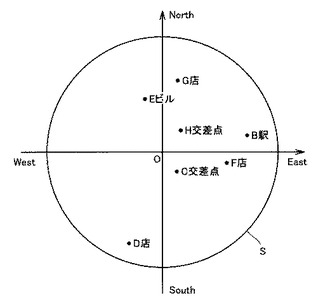
図5は、予想現在位置Oと目印との位置関係を示す第1のイメージ図である。図5に示すように、抽出部106Cは、測定現在位置のバラツキが大きい場合に、記憶部113Aを参照して、予想現在位置Oから所定距離以内に位置する目印を抽出する。より詳細には、抽出部106Cは、目印データベース113Yを参照して、予想現在位置の座標と各目印の座標とに基づいて、予想現在位置から所定距離以内(図5における円エリアSの内側)に位置する目印を抽出する。
【0056】
たとえば、抽出部106Cは、目印データベース113Yを参照して、予想現在位置に基づいて、「B駅」や「C交差点」や「D店」などを抽出する。なお、目印データベース113Yの「A駅」は、予想現在位置から所定距離以内に位置しないため、抽出部106Cは「A駅」を抽出していない。
【0057】
図2に戻って、表示制御部106Dは、記憶部113Aの地図データベース113Xを参照して、予想現在位置を実質的に中心とした地図を表示させる。そして、表示制御部106Dは、ユーザによるタッチパネル110への接触を待ち受ける。ユーザがスタイラスペンや自身の指などによってタッチパネル110のある位置に接触すると、表示制御部106Dは記憶部113Aを参照して、タッチパネル上のその位置に対応する地図上の地点を中心とした地図を表示操作部110Aに表示させる。
【0058】
図6は、抽出された目印がリスト表示された状態を示すイメージ図である。図6に示すように、表示制御部106Dは、測定現在位置のバラツキが大きい場合には、表示操作部110Aに、抽出部106Cによって抽出された目印を選択可能にリスト表示させる。具体的には、表示制御部106Dは、表示操作部110Aに、「B駅」や「C交差点」や「D店」などのような目印名を選択可能に列挙して表示する。
【0059】
図2に戻って、表示制御部106Dは、測定現在位置のバラツキが小さい場合にのみ、記憶部113Aの地図データベース113Xを参照して、表示操作部110Aに、予想現在位置を実質的に中心とした地図を表示させてもよい。そして、表示制御部106Dは、測定現在位置のバラツキが大きい場合には、地図を表示することなく、表示操作部110Aに、抽出部106Cによって抽出された目印を選択可能にリスト表示させてもよい。
【0060】
そして、表示制御部106Dは、表示操作部110Aを介して目印の選択を受け付ける。表示制御部106Dは、目印データベース113Yを参照して選択された目印の座標を取得する。表示制御部106Dは、地図データベース113Xの記憶部113Aを参照して、表示操作部110Aに、選択された目印の座標を実質的に中心とした地図を表示させる。
【0061】
そして、表示制御部106Dは、タッチパネル110へのユーザによる接触を待ち受ける。ユーザがスタイラスペンや自身の指などによってタッチパネル110上のある位置に接触すると、表示制御部106Dは記憶部113Aを参照して、タッチパネル110上のその位置に対応する地図上の地点を中心とした地図を表示操作部110Aに表示させる。
【0062】
より詳細には、表示制御部106Dは、タッチパネル110の中心位置に対するユーザが接触したタッチパネル110の位置の相対位置と、現在タッチパネル110において表示されている地図の中心座標とに基づいて、表示操作部110Aに、ユーザが接触したタッチパネル110の位置に対応する地点を中心とする地図を表示させる。
【0063】
ここで、通知部106Eは、測定現在位置のバラツキが大きい場合に、移動端末を移動させるように外部へ通知する。より詳細には、通知部106Eは、表示制御部106Dが表示操作部110Aに目印リストを表示させているにもかかわらず、ユーザが表示操作部110Aを介して目印を選択しない場合に、移動端末を移動させるようにユーザへ通知する。
【0064】
そして、抽出部106Cは、移動端末が移動した際に、方向取得部107Aから移動端末の移動方向を取得する。抽出部106Cは、予想現在位置と移動方向とに基づいて、記憶部113Aから、予想現在位置から移動方向の方向に位置する目印を抽出する。
【0065】
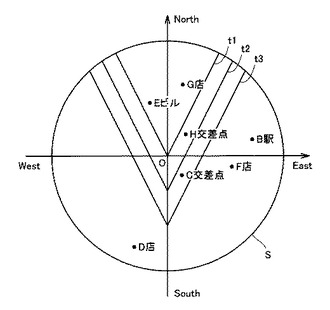
図7は、予想現在位置Oと各エリアT1,T2,T3と目印との位置関係を示すイメージ図である。図7に示すように、抽出部106Cは、予想現在位置Oと移動方向とに基づいて、記憶部113Aから、予想現在位置Oから移動方向の方向に位置する(エリアT1内に位置する)目印を抽出する。たとえば、抽出部106Cは、目印データベース113Yから「Eビル」や「G店」などを抽出する。なお、目印データベース113Yの「B駅」や「C交差点」は、予想現在位置Oから移動方向の方向に位置しないため、抽出部106Cは「B駅」や「C交差点」を抽出していない。
【0066】
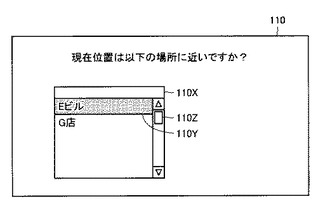
図8は、第1のエリアT1の目印がリスト表示された状態を示す第1のイメージ図である。図8に示すように、表示制御部106Dは、表示操作部110Aに、抽出部106Cによって抽出された目印を選択可能に表示させる。具体的には、「Eビル」や「G店」などのような目印名が選択可能に列挙されて表示される。表示制御部106Dは、表示操作部110Aに、目印をスクロール可能に列挙するボックス110Xや、選択位置を示すイラスト110Yや、スクロール表示するためのスクロールバー110Zなどを表示させる。
【0067】
表示制御部106Dが表示操作部110Aに目印リストを表示させているにもかかわらず、ユーザが表示操作部110Aを介して目印を選択しない場合には、抽出部106Cは、記憶部113Aを参照して、図7に示すように、目印を抽出したエリアT1よりも大きなエリアであって、かつ目印を抽出したエリアを包含するエリアT2内の目印を抽出し直す。たとえば、抽出部106Cは、目印データベース113Yから「Eビル」や「G店」や「H交差点」などを抽出する。
【0068】
図9は、第2のエリアT2の目印がリスト表示された状態を示す第2のイメージ図である。図9に示すように、表示制御部106Dは、表示操作部110Aに抽出部106Cによって抽出された目印を選択可能に表示させる。具体的には、図8に示す場合と比較して、「H交差点」の表示が増加している。
【0069】
表示制御部106Dが表示操作部110Aに目印リストを表示させているにもかかわらず、ユーザが表示操作部110Aを介して目印を選択しない場合に、抽出部106Cは、記憶部113Aを参照して、図7に示すように、目印を抽出したエリアT2よりもさらに大きなエリアであって、かつ目印を抽出したエリアを包含するエリアT3内の目印を抽出し直す。たとえば、抽出部106Cは、目印データベース113Yから「Eビル」や「G店」や「H交差点」や「C交差点」などを抽出する。
【0070】
図10は、第3のエリアT3の目印がリスト表示された状態を示す第3のイメージ図である。図10に示すように、表示制御部106Dは、表示操作部110Aに抽出部106Cによって抽出された目印を選択可能に表示させる。具体的には、図9に示す場合と比較して、「C交差点」の表示が増加している。
【0071】
ただし、通知部106Eは、選択された目印を中心にした地図が表示された場合において、所定時間接触位置が検知されない場合に、あるいは他の移動方向に位置する目印を抽出する命令を受け付けた場合に、移動端末を他の移動方向へ移動させるように外部へ通知してもよい。そして、抽出部106Cが、記憶部113Aを参照して、予想現在位置と方向取得部107Aが取得した新たな移動方向とに基づき他の目印を抽出し直してもよい。
【0072】
図11は、予想現在位置Oと第4のエリアT4と目印との位置関係を示すイメージ図である。図11に示すように、抽出部106Cは、予想現在位置Oと新たな移動方向とに基づいて、記憶部113Aから、予想現在位置Oから新たな移動方向の方向に位置する(エリアT4内に位置する)目印を抽出する。たとえば、抽出部106Cは、目印データベース113Yから「B駅」や「F店」などを抽出する。なお、目印データベース113Yの「Eビル」や「G店」は、予想現在位置Oから新たな移動方向の方向に位置するものではないため、抽出部106Cは「Eビル」や「G店」を抽出していない。
【0073】
図12は、第4のエリアT4の目印がリスト表示された状態を示す第4のイメージ図である。図12に示すように、表示制御部106Dは、表示操作部110Aに、抽出部106Cによって抽出し直された目印を選択可能に表示させる。具体的には、「B駅」や「F店」などのような目印名が選択可能に列挙されて表示される。
【0074】
そして、表示制御部106Dは、記憶部113Aを参照して、表示操作部110Aに、予め選択されたエリアT1内の目印と新たに選択されたエリアT4内の目印との中間地点を中心とした地図を表示させる。
【0075】
<PND100における現在位置表示処理>
次に、本実施の形態に係るPND100における現在位置表示処理について説明する。図13は、本実施の形態に係るPND100における現在位置表示処理の処理手順を示すフローチャートである。
【0076】
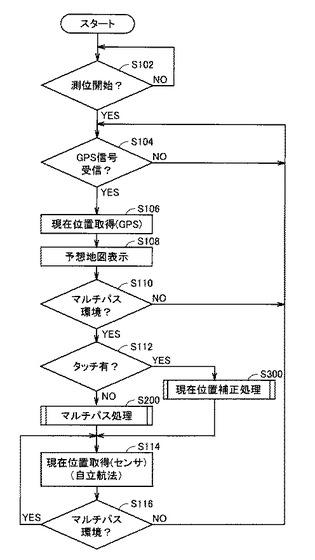
図13に示すように、ユーザがPND100に現在位置の測位を開始する旨の命令を入力すると(ステップS102にてYESである場合)、CPU106はGPS信号を待ち受ける(ステップS104)。CPU106がGPS信号を受信すると(ステップS104にてYESである場合)、CPU106は測定現在位置を取得する(ステップS106)。より詳細には、CPU106は、所定期間内に受信した所定数のGPS信号に基づいて、所定数の測定現在位置を取得する(ステップS106)。
【0077】
CPU106は、所定数の測定現在位置に基づいて、予想現在位置を演算し、タッチパネル110に予想現在位置を中心とした地図を表示させる(ステップS108)。そして、CPU106はPND100がマルチパス環境下であるか否かを判断する(ステップS110)。より詳細には、CPU106は、所定数の測定現在位置のバラツキ具合を示す指標(たとえば、所定数の測定現在位置のX座標またはY座標の標準偏差)が第1の所定値以上であるか否かを判断する。
【0078】
CPU106は、所定数の測定現在位置のバラツキ具合を示す指標が第1の所定値未満である場合(ステップS110にてNOである場合)、ステップS104からの処理を繰り返す。
【0079】
一方、CPU106は、所定数の測定現在位置のバラツキ具合を示す指標が第1の所定値以上である場合(ステップS110にてYESである場合)、タッチパネル110を介してユーザから地図上の現在位置を指定する命令を受け付ける(ステップS112)。CPU106は、地図上の現在位置を指定する命令を受け付けると、すなわちタッチパネル110に対する接触を検知すると(ステップS112にてYESである場合)、その命令に基づいて現在位置補正処理(ステップS300)を実行する。現在位置補正処理(ステップS300)については後述する。CPU106は、現在位置補正処理(ステップS300)後、自律航法を実行する(ステップS114)。
【0080】
一方、CPU106は、ユーザから地図上の現在位置を指定する命令が入力されない場合、すなわちタッチパネル110に対する接触が検知されない場合(ステップS112にてNOである場合)、マルチパス処理(ステップS200)を実行する。マルチパス処理(ステップS200)については後述する。
【0081】
マルチパス処理(ステップS200)が完了すると、CPU106は、自律航法を実行する(ステップS114)。自律航法(ステップS114)においては、CPU106は、マルチパス処理(ステップS200)にて取得した予想現在位置と、方向取得部107Aからの移動ベクトルとに基づいて予想現在位置を更新する。そして、CPU106は、所定期間毎にPND100がマルチパス環境下にあるか否かを判断する(ステップS116)。すなわち、CPU106は、定期的にGPS信号の受信を試みて、測定現在位置のバラツキが小さくなったか否かを判断する。
【0082】
そして、CPU106は、PND100がマルチパス環境下にある場合(ステップS116にてYESである場合)には自律航法を続行する(ステップS114)。一方、CPU106は、PND100がマルチパス環境下でなくなると(ステップS116にてNOである場合)、ステップS104からの処理を繰り返す。
【0083】
<PND100におけるマルチパス処理>
次に、本実施の形態に係るPND100におけるマルチパス処理について説明する。図14は、本実施の形態に係るPND100におけるマルチパス処理の処理手順を示すフローチャートである。
【0084】
図14に示すように、マルチパス処理(ステップS200)においては、まず、CPU106が、タッチパネル110やスピーカ109に、ユーザに歩行を促す旨の通知を行わせる(ステップS202)。具体的には、タッチパネル110が「2歩以上歩いて下さい。」という表示を行ったり、スピーカ109が「2歩以上歩いて下さい。」という音声を出力したりする。PND100を保持しているユーザが移動することにより、加速度センサ108がPND100自身の加速度を取得すると、CPU106は、加速度と地磁気センサ107が取得したPND100の向きとに基づいて、PND100の移動方向を取得する(ステップS204)。
【0085】
CPU106は、PND100の移動方向を取得すると(ステップS204にてYESである場合)、予想現在位置と移動方向とに基づいて、目印データベース113Yを参照して、目印を抽出する(ステップS206)。より詳細には、CPU106は、予想現在位置を始点とした、移動方向にある程度の幅(たとえば約60度)を持ったエリアT1内に位置する目印を抽出する。CPU106は、タッチパネル110に抽出した目印をリスト表示させる(ステップS208)。CPU106は、目印の選択を受け付ける(ステップS210)。
【0086】
CPU106が目印の選択を受け付けない場合(ステップS210にてNOである場合)、CPU106は目印を抽出するためのエリアT1を広げることが可能であるか否かを判断する(ステップS212)。たとえば、図7に示すように、CPU106は、目印を抽出したエリアT1が、予想現在位置から所定距離以内である円エリアSよりも未だ小さい場合、エリアT1を広げることが可能であると判断する。図14に戻って、エリアをさらに広げることが不可能な場合(ステップS212にてNOである場合)、CPU106はタッチパネル110にエラー表示をさせる(ステップS216)。
【0087】
エリアを広げることが可能である場合(ステップS212にてYESである場合)、CPU106はタッチパネル110にエリアを拡大する命令を受け付けるボタンを表示させる(ステップS214)。すなわち、CPU106は、エリアを拡大する旨の命令を待ち受ける。エリアを拡大する旨の命令が入力されると(ステップS218にてYESである場合)、CPU106は目印を抽出するためのエリアを拡大する(ステップS220)。より詳細には、CPU106は、予想現在位置から移動方向と逆向きに数m移動した位置を始点として、移動方向にある程度の幅を持ったエリアT2内に位置する目印を抽出する(ステップS206)。そして、CPU106は、ステップS206からの処理を繰り返す。
【0088】
エリアを拡大する旨の命令が入力されない場合(ステップS218にてNOである場合)、CPU106は引き続き目印の選択を待ち受ける(ステップS210)。
【0089】
CPU106が目印の選択を受け付けた場合(ステップS210にてYESである場合)には、図3に示すように、CPU106は目印データベース113Yにおける選択された目印に対応するフラグをONする(ステップS222)。
【0090】
後述するように、このとき、目印データベース113Yにおいては、複数の目印に対応するフラグがONされている場合がある。CPU106は、目印データベース113Yに基づいて、マルチパス処理(ステップS200)において選択された全ての目印、すなわちフラグがONされている全ての目印の中心座標を取得する。
【0091】
図14に戻って、CPU106は、地図データベース113Xを参照して、タッチパネル110に、その中心座標を実質的に中心とした地図を表示させる(ステップS224)。そして、CPU106は、タッチパネル110に、地図を表示させるとともに、移動方向を変更する旨の命令を受け付けるボタンを表示させる(ステップS226)。すなわち、CPU106は、ユーザに地図を表示することによって地図上の位置の指定を待ち受けつつ、ユーザから移動方向を変更する旨の命令を待ち受ける(ステップS228)。
【0092】
ユーザがタッチパネル110を介して地図上の1点を指定すると(ステップS228にてYESである場合)、すなわちユーザがスタイラスペンや指を介してタッチパネル110上の地図に接触すると、CPU106は現在位置補正処理(ステップS300)を実行する。
【0093】
一方、ユーザがタッチパネル110を介して地図上の1点を指定することなく(ステップS228にてNOである場合)、ユーザが移動方向を変更する旨の命令を入力すると(ステップS230にてYESである場合)、CPU106はステップS202からの処理を繰り返す。このように、目印データベース113Yにおいて、複数の目印に対応するフラグがONされることがあり得る。
【0094】
より詳細には、ユーザが新たに他の方向に移動することにより(ステップS204)、CPU106がその新たな他の移動方向と予想現在位置とから目印を抽出し直す(ステップS206)。新たな目印が選択されると(ステップS210にてYESである場合)、図3に示すように、CPU106は、目印データベース113Yにおける新たに選択された目印に対応するフラグをONする(ステップS222)。そして、CPU106は、目印データベース113Yに基づいて、今回のマルチパス処理(200)において選択された全ての目印の中心座標を取得する。図14に戻って、CPU106は、地図データベース113Xを参照して、タッチパネル110に、その中心座標を実質的に中心とした地図を表示させる(ステップS224)。
【0095】
<PND100における現在位置補正処理>
次に、本実施の形態に係るPND100における現在位置補正処理について説明する。図15は、本実施の形態に係るPND100における現在位置補正処理の処理手順を示すフローチャートである。
【0096】
図15に示すように、現在位置補正処理(ステップS300)においては、CPU106が、タッチパネル110への接触位置を検知する(ステップS302)。CPU106は、接触位置に対応する地図上の位置座標を取得する(ステップS304)。より詳細には、CPU106は、ユーザが接触したタッチパネル110上の位置(画素)のタッチパネル110の中心(またはタッチパネル110の角部)に対する相対位置と、現在表示されている地図の中心座標とに基づいて、次に表示する地図の中心座標を演算する。
【0097】
そして、CPU106は、地図データベース113Xを参照して、タッチパネル110に、その中心座標を実質的に中心とした地図を表示させる(ステップS306)。その後、図13〜図15に示すように、CPU106は、上記のようにして取得されたより正確な現在位置を初期位置として自律航法を実行する(ステップS114)。
【0098】
このようにして、本実施の形態に係るPND100は、マルチパス環境においても正確な現在位置を取得することができ、その後の自律航法の精度を向上させることができる。
【0099】
また、PND100がより正確な現在位置を取得するためには、目印を選択するための円エリアS内に多くの目印が設定される必要がある。しかしながら、円エリアS内に設定される目印が多くなればなるほど、ユーザが目印リストから目印を選択し難くなる。本実施の形態に係るPND100は、ユーザに、ユーザが移動した方向の目印を選択させるため、ユーザはリスト表示された目印を容易に選択することができる。
【0100】
さらに、本実施の形態に係るPND100はユーザが選択した目印を中心とした地図を表示するため、ユーザが表示されている地図の中心に位置する建物さえも把握できない場合と比較して、ユーザが地図上における自身の現在位置を容易に認識することができる。その結果、ユーザは、タッチパネルへの接触動作などによって、PND100に正確な現在位置を容易に入力することができる。
【0101】
<その他の実施の形態>
本発明は、システム或いは装置にプログラムを供給することによって達成される場合にも適用できることはいうまでもない。そして、本発明を達成するためのソフトウェアによって表されるプログラムを格納した記憶媒体を、システム或いは装置に供給し、そのシステム或いは装置のコンピュータ(又はCPUやMPU)が記憶媒体に格納されたプログラムコードを読出し実行することによっても、本発明の効果を享受することが可能となる。
【0102】
この場合、記憶媒体から読出されたプログラムコード自体が前述した実施の形態の機能を実現することになり、そのプログラムコードを記憶した記憶媒体は本発明を構成することになる。
【0103】
プログラムコードを供給するための記憶媒体としては、例えば、ハードディスク、光ディスク、光磁気ディスク、CD−ROM、CD−R、磁気テープ、不揮発性のメモリカード(ICメモリカード)、ROM(マスクROM、フラッシュEEPROMなど)などを用いることができる。
【0104】
また、コンピュータが読出したプログラムコードを実行することにより、前述した実施の形態の機能が実現されるだけでなく、そのプログラムコードの指示に基づき、コンピュータ上で稼動しているOS(オペレーティングシステム)などが実際の処理の一部または全部を行い、その処理によって前述した実施の形態の機能が実現される場合も含まれることは言うまでもない。
【0105】
さらに、記憶媒体から読み出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書き込まれた後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPUなどが実際の処理の一部または全部を行い、その処理によって前述した実施の形態の機能が実現される場合も含まれることは言うまでもない。
【0106】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した説明ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0107】
【図1】本実施の形態に係る移動端末の一例であるPNDのハードウェア構成を示す制御ブロック図である。
【図2】本実施の形態に係る移動端末の機能構成を示すブロック図である。
【図3】記憶部に記憶されている目印データベースのデータ構造を示すイメージ図である。
【図4】記憶部に記憶されている位置データベースのデータ構造を示すイメージ図である。
【図5】予想現在位置と目印との位置関係を示す第1のイメージ図である。
【図6】目印がリスト表示された状態を示すイメージ図である。
【図7】予想現在位置と各エリアと目印との位置関係を示すイメージ図である。
【図8】第1のエリアの目印がリスト表示された状態を示す第1のイメージ図である。
【図9】第2のエリアの目印がリスト表示された状態を示す第2のイメージ図である。
【図10】第3のエリアの目印がリスト表示された状態を示す第3のイメージ図である。
【図11】予想現在位置と第4のエリアと目印との位置関係を示すイメージ図である。
【図12】第4のエリアの目印がリスト表示された状態を示す第4のイメージ図である。
【図13】本実施の形態に係るPNDにおける現在位置表示処理の処理手順を示すフローチャートである。
【図14】本実施の形態に係るPNDにおけるマルチパス処理の処理手順を示すフローチャートである。
【図15】本実施の形態に係るPNDにおける現在位置補正処理の処理手順を示すフローチャートである。
【符号の説明】
【0108】
100 PND、101 無線通信部、102 GPS信号処理部、102A 位置取得部、103 RAM、104 ROM、105 電池、106 CPU、106A 演算処理部、107 地磁気センサ、107A 方向取得部、108 加速度センサ、109 スピーカ、110 タッチパネル、111 通信アンテナ、112 測位アンテナ、113 HDD、113A 記憶部、113X 地図データベース、113Y 目印データベース、113Z 位置データベース、S,T1,T2,T3,T4 目印抽出エリア。
【技術分野】
【0001】
本発明は、外部からの測位用電波に基づいて自身の現在位置を取得することができる移動端末、移動端末における現在位置表示方法、および現在位置表示プログラムに関し、特に外部からの測位用電波を正確に受信できない環境下においても精度良く現在位置を取得することができる移動端末、移動端末における現在位置表示方法、および現在位置表示プログラムに関する。
【背景技術】
【0002】
自身の現在位置を取得する機能、たとえばGPS(Global Positioning System)衛星からの測位用電波を受信することによって自身の現在位置を特定するGPS機能を備える移動端末が開発されている。
【0003】
しかしながら、上記の移動端末は、地下などのように移動端末が測位用電波を受信できない環境においては、現在位置を取得することができない。また、ビルの間などにように測位用電波がビルで反射してから移動端末に到達する環境、すなわち衛星から移動端末までの電波到達距離(時間)の誤差が大きい環境(いわゆるマルチパス環境)においては、測位用電波に基づいて取得される現在位置の誤差が大きくなる。
【0004】
そこで、測位用電波に基づいて現在位置を取得できない環境や、測位用電波に基づいて取得した現在位置の誤差が大きい環境に対応できる、自律航法が可能な移動端末が提案されている。
【0005】
たとえば、特開平2−93681号公報(特許文献1)には、車両用経路誘導装置に対してオペレータが位置設定を行う車両位置設定方法が開示されている。特開平2−93681号公報(特許文献1)によると、車両位置設定方法は、上記の位置設定が道路の交差点名に基づいて行われる。また、上記の位置設定が、建物ごとにその名称または居住者名が記載されている住宅地図を用いることにより行われる。
【0006】
また、特開平11−64015号公報(特許文献2)には、ナビゲーションシステムが開示されている。特開平11−64015号公報(特許文献2)によると、周辺目印名称表示選択部が、地図とともに表示すべき周辺目印名称の地図番号を決定する。次に、この地図番号と入力装置部より入力された使用者が要求している周辺目印名称の種別と縮尺レベルの情報から、表示する地図データと使用者が要求する種別や縮尺レベルに適切に対応した周辺目印名称を、周辺目印名称記憶装置部より検索して読み出して制御部に出力する。そしてこの制御部で、現在位置、地図データ、周辺目印名称を合成し、表示装置部に表示させる。
【0007】
また、特開2007−205718号公報(特許文献3)には、歩行者ナビゲーション装置が開示されている。特開2007−205718号公報(特許文献3)によると、歩行者ナビゲーション装置は、歩行者の現在位置に最も近い基準位置データを含み、目的地に最も近い移動先位置データを含むデータセットを検索するデータセット検索プログラムと、データセットに含まれる座標の周辺を切り出した大縮尺地図を表示する大縮尺地図表示プログラムと、現在位置に最も近い基準位置を表示する基準位置表示プログラムと、目的地に最も近い移動先位置を表示する移動先位置表示プログラムと、現在位置から目的地までの移動経路を表示する移動経路表示プログラムと、目的地に最も近い移動先位置の近傍にある目標地物を表示する目標地物表示プログラムと、目標地物から目的地に最も近い移動先位置までの相対位置を表示する移動先相対位置表示プログラムとを備える。
【0008】
また、地磁気センサや加速度センサを利用することによって、現在位置を取得する移動端末なども提案されている。たとえば、特開2003−172633号公報(特許文献4)には、集積化方位センサが開示されている。特開2003−172633号公報(特許文献4)によると、集積化方位センサは、重力加速度を検出する加速度センサと、地磁気を検出する磁気センサと、加速度センサからの加速度情報および磁気センサからの磁気情報を演算処理する演算処理部とを備える。加速度センサは、ガラス台に固定される支持体と、重り部と、この重り部を可動自在に支持体に支持させる梁等から構成される。加速度センサを構成する重り部上の所定位置には、磁気センサおよび演算処理部がそれぞれ配置されている。
【0009】
また、特開2007−108326号公報(特許文献5)には、携帯型地図表示装置が開示されている。特開2007−108326号公報(特許文献5)によると、正面方位算出部は端末の正面方位を算出する。進行方位算出部は、移動方向検出部からの携帯機器移動方向情報と、正面方位算出部からの端末正面方位情報とから、携帯機器の進行方向がどの方位に向かって進行しているのかの情報を得る。選択部は、端末移動状態検出部からの情報をもとに、携帯機器が歩行者によって保持されていると判断されているときは正面方位算出部から得た方位情報を選択し、携帯機器が車載状態であると判断されるときは進行方位検出部からの方位情報を選択して計算部に渡す。計算部は、記憶部に保存されている地図情報を読み出すとともに、選択部からの表示方位情報およびGPSが取得する緯度経度情報をもとに地図情報を処理し、表示部に送る。
【特許文献1】特開平2−93681号公報
【特許文献2】特開平11−64015号公報
【特許文献3】特開2007−205718号公報
【特許文献4】特開2003−172633号公報
【特許文献5】特開2007−108326号公報
【特許文献6】特開2004−226170号公報
【特許文献7】特開2000−205888号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
移動端末は、自律航法の際、最後に測定された現在位置と当該現在位置からの相対位置とに基づいて新たな現在位置を演算する。そのため、移動端末は、自律航法を開始する際に正確な現在位置を取得する必要がある。しかしながら、上記の従来の移動端末においては、自律航法を開始する際に、移動端末の正確な現在位置を取得することが困難であった。特に、初めて訪れる場所において、移動端末のユーザが、移動端末に自分の現在位置や現在位置付近に関する情報を入力することは困難である。その結果、たとえば、上記の従来の移動端末においては、不正確な現在位置を初期位置として自律航法を行わざるを得なかった。
【0011】
本発明はこのような問題点を解決するためになされたものであって、本発明の主たる目的は、外部から測位用電波を正確に受信できない環境下においても精度良く現在位置を取得することができる移動端末、移動端末における現在位置表示方法、および現在位置表示プログラムを提供することである。
【課題を解決するための手段】
【0012】
本発明の1つの局面に従うと、移動端末が提供される。移動端末は、表示部と、地図を表示するための地図データと、位置座標に対応付けられた目印とを記憶する記憶部と、移動端末の予想現在位置を取得する位置取得手段と、移動端末の移動方向を取得する方向取得手段と、記憶部を参照して、予想現在位置と移動方向とに基づき、予想現在位置の周辺に位置する目印を抽出する抽出手段と、表示部に、抽出手段によって抽出された目印を選択可能に表示させる表示制御手段と、目印の選択を受け付ける操作部とを備える。表示制御手段は、記憶部を参照して、表示部に、選択された目印を実質的に中心とした地図を表示させる。
【0013】
好ましくは、抽出手段は、記憶部を参照して、予想現在位置から所定距離以内であって、予想現在位置から移動方向の方向に位置する目印を抽出する。
【0014】
好ましくは、移動端末は、表示部と操作部とを含むタッチパネルをさらに備える。表示制御手段は、記憶部を参照して、表示部に、タッチパネルによって検知された接触位置に対応する地点を実質的に中心とした地図を表示させる。
【0015】
好ましくは、位置取得手段は、所定期間内に取得した複数の測定現在位置に基づいて予想現在位置を演算する。表示制御手段は、記憶部を参照して、表示部に、予想現在位置を実質的に中心とした地図を表示させる。移動端末は、複数の測定現在位置の偏差に関する値が所定値以上であるか否かを判断する判断手段をさらに備える。抽出手段は、複数の測定現在位置の偏差に関する値が所定値以上である場合に、記憶部を参照して、予想現在位置に基づき、予想現在位置の周辺に位置する目印を抽出する。
【0016】
好ましくは、移動端末は、目印が選択されない場合に、移動端末を移動させるように外部へ通知する通知手段をさらに備える。抽出手段は、方向取得手段が移動方向を取得した際に、記憶部を参照して、予想現在位置と移動方向とに基づき、予想現在位置の周辺に位置する目印を抽出し直す。
【0017】
好ましくは、判断手段は、移動端末の電源が投入されたとき、あるいは位置取得手段が第1の所定期間以上空けて測定現在位置を取得したときに、複数の測定現在位置の偏差に関する値が第1の所定値以上であるか否かを判断する。
【0018】
好ましくは、抽出手段は、目印が選択されない場合に、記憶部を参照して、目印を抽出したエリアよりも大きなエリアであって、かつ目印を抽出したエリアを包含するエリア内の目印を抽出し直す。
【0019】
好ましくは、移動端末は、目印が選択された場合であって、かつ接触位置が検知されない場合に、移動端末を他の移動方向へ移動させるように外部へ通知する通知手段をさらに備える。抽出手段は、記憶部を参照して、予想現在位置と他の移動方向とに基づき他の目印を抽出し直す。表示制御手段は、表示部に、抽出手段によって抽出された他の目印を選択可能に表示させる。表示制御手段は、記憶部を参照して、選択された目印と選択された他の目印の中間地点を中心とした地図を表示させる。
【0020】
この発明の別の局面に従うと、移動端末における現在位置表示方法が提供される。移動端末は、表示部と、地図を表示するための地図データと、位置座標に対応付けられた目印とを記憶する記憶部と、移動端末の予想現在位置を取得する位置取得手段と、移動端末の移動方向を取得する方向取得手段と、移動端末の各部を制御する制御部とを備える。現在位置表示方法は、制御部が、記憶部を参照して、予想現在位置と移動方向とに基づき、予想現在位置の周辺に位置する目印を抽出するステップと、制御部が、表示部に、抽出するステップにて抽出された目印を選択可能に表示させるステップと、制御部が、目印の選択を受け付けるステップと、制御部が、記憶部を参照して、表示部に、選択された目印を中心とした地図を表示させるステップとを備える。
【0021】
この発明の別の局面に従うと、移動端末に現在位置を表示させるための現在位置表示プログラムが提供される。移動端末は、表示部と、地図を表示するための地図データと、位置座標に対応付けられた目印とを記憶する記憶部と、移動端末の予想現在位置を取得する位置取得手段と、移動端末の移動方向を取得する方向取得手段と、移動端末の各部を制御する制御部とを備える。現在位置表示プログラムは、制御部に、記憶部を参照して、予想現在位置と移動方向とに基づき、予想現在位置の周辺に位置する目印を抽出するステップと、表示部に、抽出するステップにて抽出された目印を選択可能に表示させるステップと、目印の選択を受け付けるステップと、記憶部を参照して、表示部に、選択された目印を中心とした地図を表示させるステップとを実行させる。
【発明の効果】
【0022】
以上のように、この発明によれば、外部からの測位用電波を正確に受信できない環境下においても精度良く現在位置を取得することができる移動端末、移動端末における現在位置表示方法、および現在位置表示プログラムが実現される。
【発明を実施するための最良の形態】
【0023】
以下、図面に基づいて本発明の実施の形態について説明する。なお以下の説明では、同一の部品については同一の符号を付すものとし、当該部品の名称や機能が同一である場合には、当該部品についての詳細な説明は繰り返さない。
【0024】
「移動端末」は、移動端末自身の予想現在位置を取得する位置取得手段と、移動端末の移動方向を取得する方向取得手段とを備える情報機器である。「移動端末」は、ユーザによって持ち運ばれたり、車両などに搭載されたりする。より詳細には、「移動端末」は、たとえばGPS機能に代表される、外部からの測位用電波に基づいて移動端末の現在位置を取得するための機能と、地磁気センサや加速度センサに代表される移動端末の加速度を取得するための機能と、地図データを格納する記憶部とを有しており、表示部を介して移動端末自身の現在位置を地図上に表示することができる。具体的には、「移動端末」は、携帯電話やカーナビゲーション装置(Satellite navigation system)やPND(Personal Navigation Device)やノート型パーソナルコンピュータや電子辞書などによって実現される。
【0025】
<PND100の動作概要>
本実施の形態に係る移動端末の一例であるPNDにおける動作概要について説明する。まず、本実施の形態に係るPNDは、GPS衛星などからの測位用電波を受信して自身の現在位置を測定する。すなわち、PNDは、測位用電波に基づいて、測定現在位置を取得する。そして、PNDがマルチパス環境下にあるか否かを判断する。具体的には、PNDは、所定期間内に測位用電波に基づいて取得された複数の測定現在位置のバラツキが大きいか否かに基づいて、自身がマルチパス環境にあるか否かを判断する。
【0026】
PNDは、電源が投入された際に自身がマルチパス環境下にあるか否かを判断してもよいし、所定期間以上空けて測位用電波を取得した際に自身がマルチパス環境下にあるか否かを判断してもよい。また、PNDは、測位用電波を受信する度に自身がマルチパス環境下にあるか否かを判断してもよいし、ユーザから自律航法を行う旨の指令を受け付けた際に自身がマルチパス環境下にあるか否かを判断してもよい。
【0027】
PNDがマルチパス環境下にある場合には、PNDは所定期間内に取得した複数の測定現在位置に基づいて予想現在位置を演算する。そして、PNDは、PNDを保持しているユーザに対して一定量以上移動するよう通知する。たとえば、PNDは、2歩以上歩行するように、ユーザに指示する。ユーザが移動すると、PNDは自身の加速度を測定することによって自身の移動方向を取得する。PNDは、予想現在位置と移動方向とに基づいて、記憶部を参照して、予想現在位置から見て移動方向側に位置する目印を抽出し、当該目印を選択可能にリスト表示する。ここでの目印とは、たとえば、建物名や、店舗名や、交差点名などをいい、PNDが地図上におけるそれらの存在位置(地図データ上の位置座標)を取得することができる対象物(オブジェクト)をいう。
【0028】
このように、本実施の形態に係るPNDにおいては、PND(ユーザ)の移動方向側に位置する目印がリスト表示されるため、ユーザは容易に目印に対応する建物などを見つけることができる。つまり、ユーザは、PNDにおいて、容易に目印を選択することができる。そして、ユーザが目印を選択すると、PNDは、記憶部を参照して、表示部に当該目印が位置する地点を中心とした地図を表示する。
【0029】
PNDは、たとえば、表示部および操作部として機能するタッチパネルに、当該目印が位置する地点を中心とした地図を表示させる。そして、PNDは、ユーザによるタッチパネルへの接触を待ち受ける。ユーザが、スタイラスペンや自身の指などによって、タッチパネルに接触すると、PNDは地図データを参照して、タッチパネル上の接触位置に対応する地図上の地点を中心とした地図を表示する。
【0030】
このようにして、本実施の形態に係るPNDは、マルチパス環境においても正確な現在位置を取得することができ、その後の自律航法の精度を向上させることができる。特に、PNDは、ユーザに、ユーザが移動した方向の目印を選択させるため、ユーザはリスト表示された目印を容易に選択することができる。
【0031】
さらに、本実施の形態に係るPNDはユーザが選択した目印を中心とした地図を表示するため、ユーザが表示されている地図の中心に位置する建物さえも把握できない場合と比較して、ユーザが地図上における自身の現在位置を容易に認識することができる。その結果、ユーザは、タッチパネルへの接触動作などによって、PNDに正確な現在位置を容易に入力することができる。
【0032】
以下、このような動作を実現するための構成について詳述する。
<PND100のハードウェア構成>
図1は、本実施の形態に係る移動端末の一例であるPND100のハードウェア構成を示す制御ブロック図である。図1に示すように、本実施の形態に係るPND100は、PND100の各部を制御するためのCPU(Central Processing Unit)106と、通信信号を送受信する通信アンテナ111と、通信信号とデータとを相互に変換する無線通信部101と、GPS衛星からの電波を受信する測位アンテナ112と、その電波に基づいて測定現在位置を取得するGPS信号処理部102と、測定現在位置や予想現在位置や目的地点などを格納するRAM(Random Access Memory)103と、制御プログラムなどを格納するROM(Read Only Memory)104と、PND100の各部に電力を供給する電池105と、PND100の向きを取得するための地磁気センサ107と、PND100に所定の座標系におけるPND100の加速度を取得するための加速度センサ108と、音声を出力するスピーカ109と、タッチパネル110と、各種データを記憶するHDD(Hard Disk Drive)113とを備える。
【0033】
無線通信部101は、CPU106からの通信データを通信信号に変換し、その通信信号を通信アンテナ111を介して発信する。無線通信部101は、通信アンテナ111を介して受信した通信信号を通信データに変換し、その通信データをCPU106に入力する。これによって、本実施の形態に係るPND100は、たとえばデジタル放送を受信したり、ネットワークを介してキャリア網やインターネット網に接続したりすることができる。
【0034】
GPS信号処理部102は、測位アンテナ112を介して受信した測位用電波に基づいて、PND100の現在位置を示す情報(測定現在位置)を生成し、その測定現在位置をCPU106に入力する。
【0035】
タッチパネル110は、画像を表示するモニタ(表示部)と、液晶ディスプレイに積層されるスイッチ(操作部)から構成される。なお、モニタ(表示部)は、液晶パネルやCRTから構成されるものであって、CPU106が出力したデータに基づいて、画像やテキストを表示する。スイッチ(操作部)は、スタイラスペンによる押下やキー入力操作などによってユーザから情報を受け付ける。
【0036】
HDD113は、地図データや現在位置に関するデータ(測定現在位置や予想現在位置)などを格納する。ただし、PND100は、地図データや現在位置に関するデータ(測定現在位置や予想現在位置)などを格納できればよく、HDD113などの固定ディスクを装備する構成でなくともよい。たとえば、PND100は、HDD113の代わりに、メモリインターフェイスを装備する構成であってもよい。そして、メモリインターフェイスに、SDカードなどの着脱自在なメモリが装着される構成であってもよい。
【0037】
<移動端末の機能構成>
次に、本実施の形態に係る移動端末の機能構成について説明する。図2は、本実施の形態に係る移動端末の機能構成を示すブロック図である。図2に示すように、本実施の形態に係る移動端末は、位置取得部102Aと、方向取得部107Aと、判断部106Bと、抽出部106Cと、表示制御部106Dと、通知部106Eと、表示操作部110Aと、スピーカ109と、記憶部113Aとを含む。
【0038】
なお、図2に示される各機能は、CPU106がROM104やHDD113などに記憶されるプログラムを実行して図1に示される各ハードウェアを制御することによって発揮される機能である。本実施の形態においては、現在位置表示処理のための機能が移動端末などのコンピュータ上で実行されるソフトウェアによって実現される構成としているが、各ブロックの機能や各ステップの処理をソフトウェアによって実現する代わりに、各々を専用のハードウェア回路等によって実現してもよい。
【0039】
以下、各機能について説明する。まず、位置取得部102Aは、たとえば、測位アンテナ112やGPS信号処理部102やCPU106などによって実現される。位置取得部102Aは、複数のGPS衛星からの測位用電波を受信して、測定現在位置を取得する。位置取得部102Aは、所定期間内に取得された複数の測定現在位置に基づいて、移動端末自身の予想現在位置を取得する。
【0040】
より詳細には、位置取得部102Aは、所定期間内の複数の測定現在位置に関するX座標の平均値を予想現在位置のX座標とし、所定期間内の複数の測定現在位置に関するY座標の平均値を予想現在位置のY座標とする。そして、位置取得部102Aは、複数の測定現在位置や予想現在位置を、記憶部113Aの所定領域に格納する。これによって、位置取得部102Aは、所定期間内の複数の測定現在位置や予想現在位置を判断部106Bや抽出部106Cに受け渡す。
【0041】
方向取得部107Aは、たとえば、地磁気センサ107や加速度センサ108やCPU106などによって実現される。方向取得部107Aは、加速度センサ108にて取得される移動端末の座標系における加速度を、地磁気センサ107にて取得される移動端末の向き(姿勢)に基づいて絶対座標系(地図上の座標系)における加速度に修正する。
【0042】
これによって、移動端末は、自身の移動方向を把握することができる。そして、方向取得部107Aは、移動端末自身の移動方向に関するデータを記憶部113Aの所定の領域に格納する。これによって、方向取得部107Aは、移動端末自身の移動方向に関するデータを抽出部106Cに受け渡す。
【0043】
なお、地磁気センサ107および加速度センサ108(いわゆる6軸センサ)を利用した移動端末の移動方向の取得方法は、たとえば、特開2003−172633号公報(特許文献4)や、特開2007−108326号公報(特許文献5)などによって公知の技術となっているため、ここでは説明を繰り返さない。
【0044】
そして、表示操作部110Aは、たとえば、タッチパネル110によって実現される。表示操作部110Aは、目的地の設定を受け付ける。表示操作部110Aは、複数の目印を選択可能にリスト表示するとともに、ユーザによる目印の選択を受け付ける。すなわち、ユーザは、表示操作部110Aを介して、目印の選択命令を入力する。また、表示操作部110Aは、スタイラスペンやユーザの指によって、表示中の地図内における位置の指定を受け付ける。すなわち、ユーザは、表示操作部110Aに接触することによって、表示中の地図内における位置の指定を入力する。
【0045】
(記憶部113Aの機能構成)
記憶部113Aは、RAM103やROM104やHDD113などによって実現される。記憶部113Aは、地図を表示するための地図データや、移動端末の測定現在位置や、移動端末の予想現在位置などを格納する。具体的には、記憶部113Aは、地図を表示するための地図データを格納する地図データベース113Xや、目印に関するデータを格納する目印データベース113Yや、測定現在位置や予想現在位置などを格納する位置データベース113Zなどを記憶する。
【0046】
地図データベース113Xは、地図を構成する画像データのそれぞれを位置座標データに対応付けて記憶する。
【0047】
図3は、記憶部113Aに記憶されている目印データベース113Yのデータ構造を示すイメージ図である。図3に示すように、目印データベース113Yには、建物名や店舗名などの目印の名称と、目印の位置座標と、目印の重みと、リスト表示するか否かを示すフラグとが対応付けられて格納されている。ここで、目印の重みとは、ユーザにとっての見つけ易さや、看板の目立ち度合いや、周知度合いに応じて、予め目印毎にあるいは目印の属性(種類)毎に設定される数値である。
【0048】
図4は、記憶部113Aに記憶されている位置データベース113Zのデータ構造を示すイメージ図である。図4に示すように、位置データベース113Zは、所定期間内に位置取得部102Aによって取得された所定数の測定現在位置と、その所定数の測定現在位置に基づいて演算される予想現在位置とを逐次格納していく。このようにして、位置データベース113Zは、最新の所定数の測定現在位置と、最新の予想現在位置を格納する。
【0049】
具体的には、位置取得部102Aが取得した新たな測定現在位置によって、位置データベース113Zの最も古い測定現在位置が更新される。このとき、CPU106は、その新たな測定現在位置を含む所定数の測定現在位置に基づいて、新たな予想現在位置を計算する。そして、CPU106は、当該新たな予想現在位置によって位置データベース113Zの予想現在位置を更新する。
【0050】
位置データベース113Zは、測定現在位置毎に、その位置座標とその取得時間とを格納している。
【0051】
(演算処理部106Aの機能構成)
図2に戻って、判断部106Bや抽出部106Cや表示制御部106Dや通知部106Eは、演算処理部106Aに含まれる機能である。そして、演算処理部106Aは、たとえば、CPU106によって実現される。すなわち、演算処理部106Aが有する各機能は、CPU106が、ROM104やHDD113に記憶されたプログラムを一旦RAM103へと読み出して、RAM103からそのプログラムを読み出しながら順次実行することによって実現される。
【0052】
判断部106Bは、所定期間内に位置取得部102Aによって取得された測定現在位置のバラツキが大きいか否かを判断する。より詳細には、判断部106Bは、位置取得部102Aが所定期間内に取得した測定現在位置のバラツキを示す指標(偏差)が、第1の所定値以上であるか否かを判断する。具体的には、判断部106Bは、所定数の測定現在位置のx座標の標準偏差が第1の所定値以上であるか否か、あるいは、y座標の標準偏差が第1の所定値以上であるか否かを判断する。すなわち、判断部106Bは、移動端末が測定現在位置の誤差が大きいマルチパス環境下にあるか否かを判断する。
【0053】
なお、判断部106Bは、位置データベース113Zを参照して、移動端末の電源が投入されたとき、あるいは位置取得部102Aが第1の所定期間以上空いた後に測定現在位置を再取得したときに、複数の測定現在位置の偏差に関する値が第1の所定値以上であるか否かを判断する。すなわち、判断部106Bは、移動端末が地下から地上へ移動した際や、移動端末が屋内から屋外へ移動した際などに、移動端末がマルチパス環境下にあるか否かを判断する。
【0054】
抽出部106Cは、測定現在位置のバラツキが大きい場合に、記憶部113Aを参照して、位置取得部102Aによって取得された予想現在位置と方向取得部107Aによって取得された移動方向とに基づいて、予想現在位置の周辺に位置する目印を抽出する。より詳細には、抽出部106Cは、位置取得部102Aが所定期間内に取得した測定現在位置のバラツキを示す指標(偏差)が、所定値以上である場合に、位置データベース113Zの予想現在位置と目印データベース113Yとに基づいて、予想現在位置から所定距離以内に位置する目印を抽出する。
【0055】
図5は、予想現在位置Oと目印との位置関係を示す第1のイメージ図である。図5に示すように、抽出部106Cは、測定現在位置のバラツキが大きい場合に、記憶部113Aを参照して、予想現在位置Oから所定距離以内に位置する目印を抽出する。より詳細には、抽出部106Cは、目印データベース113Yを参照して、予想現在位置の座標と各目印の座標とに基づいて、予想現在位置から所定距離以内(図5における円エリアSの内側)に位置する目印を抽出する。
【0056】
たとえば、抽出部106Cは、目印データベース113Yを参照して、予想現在位置に基づいて、「B駅」や「C交差点」や「D店」などを抽出する。なお、目印データベース113Yの「A駅」は、予想現在位置から所定距離以内に位置しないため、抽出部106Cは「A駅」を抽出していない。
【0057】
図2に戻って、表示制御部106Dは、記憶部113Aの地図データベース113Xを参照して、予想現在位置を実質的に中心とした地図を表示させる。そして、表示制御部106Dは、ユーザによるタッチパネル110への接触を待ち受ける。ユーザがスタイラスペンや自身の指などによってタッチパネル110のある位置に接触すると、表示制御部106Dは記憶部113Aを参照して、タッチパネル上のその位置に対応する地図上の地点を中心とした地図を表示操作部110Aに表示させる。
【0058】
図6は、抽出された目印がリスト表示された状態を示すイメージ図である。図6に示すように、表示制御部106Dは、測定現在位置のバラツキが大きい場合には、表示操作部110Aに、抽出部106Cによって抽出された目印を選択可能にリスト表示させる。具体的には、表示制御部106Dは、表示操作部110Aに、「B駅」や「C交差点」や「D店」などのような目印名を選択可能に列挙して表示する。
【0059】
図2に戻って、表示制御部106Dは、測定現在位置のバラツキが小さい場合にのみ、記憶部113Aの地図データベース113Xを参照して、表示操作部110Aに、予想現在位置を実質的に中心とした地図を表示させてもよい。そして、表示制御部106Dは、測定現在位置のバラツキが大きい場合には、地図を表示することなく、表示操作部110Aに、抽出部106Cによって抽出された目印を選択可能にリスト表示させてもよい。
【0060】
そして、表示制御部106Dは、表示操作部110Aを介して目印の選択を受け付ける。表示制御部106Dは、目印データベース113Yを参照して選択された目印の座標を取得する。表示制御部106Dは、地図データベース113Xの記憶部113Aを参照して、表示操作部110Aに、選択された目印の座標を実質的に中心とした地図を表示させる。
【0061】
そして、表示制御部106Dは、タッチパネル110へのユーザによる接触を待ち受ける。ユーザがスタイラスペンや自身の指などによってタッチパネル110上のある位置に接触すると、表示制御部106Dは記憶部113Aを参照して、タッチパネル110上のその位置に対応する地図上の地点を中心とした地図を表示操作部110Aに表示させる。
【0062】
より詳細には、表示制御部106Dは、タッチパネル110の中心位置に対するユーザが接触したタッチパネル110の位置の相対位置と、現在タッチパネル110において表示されている地図の中心座標とに基づいて、表示操作部110Aに、ユーザが接触したタッチパネル110の位置に対応する地点を中心とする地図を表示させる。
【0063】
ここで、通知部106Eは、測定現在位置のバラツキが大きい場合に、移動端末を移動させるように外部へ通知する。より詳細には、通知部106Eは、表示制御部106Dが表示操作部110Aに目印リストを表示させているにもかかわらず、ユーザが表示操作部110Aを介して目印を選択しない場合に、移動端末を移動させるようにユーザへ通知する。
【0064】
そして、抽出部106Cは、移動端末が移動した際に、方向取得部107Aから移動端末の移動方向を取得する。抽出部106Cは、予想現在位置と移動方向とに基づいて、記憶部113Aから、予想現在位置から移動方向の方向に位置する目印を抽出する。
【0065】
図7は、予想現在位置Oと各エリアT1,T2,T3と目印との位置関係を示すイメージ図である。図7に示すように、抽出部106Cは、予想現在位置Oと移動方向とに基づいて、記憶部113Aから、予想現在位置Oから移動方向の方向に位置する(エリアT1内に位置する)目印を抽出する。たとえば、抽出部106Cは、目印データベース113Yから「Eビル」や「G店」などを抽出する。なお、目印データベース113Yの「B駅」や「C交差点」は、予想現在位置Oから移動方向の方向に位置しないため、抽出部106Cは「B駅」や「C交差点」を抽出していない。
【0066】
図8は、第1のエリアT1の目印がリスト表示された状態を示す第1のイメージ図である。図8に示すように、表示制御部106Dは、表示操作部110Aに、抽出部106Cによって抽出された目印を選択可能に表示させる。具体的には、「Eビル」や「G店」などのような目印名が選択可能に列挙されて表示される。表示制御部106Dは、表示操作部110Aに、目印をスクロール可能に列挙するボックス110Xや、選択位置を示すイラスト110Yや、スクロール表示するためのスクロールバー110Zなどを表示させる。
【0067】
表示制御部106Dが表示操作部110Aに目印リストを表示させているにもかかわらず、ユーザが表示操作部110Aを介して目印を選択しない場合には、抽出部106Cは、記憶部113Aを参照して、図7に示すように、目印を抽出したエリアT1よりも大きなエリアであって、かつ目印を抽出したエリアを包含するエリアT2内の目印を抽出し直す。たとえば、抽出部106Cは、目印データベース113Yから「Eビル」や「G店」や「H交差点」などを抽出する。
【0068】
図9は、第2のエリアT2の目印がリスト表示された状態を示す第2のイメージ図である。図9に示すように、表示制御部106Dは、表示操作部110Aに抽出部106Cによって抽出された目印を選択可能に表示させる。具体的には、図8に示す場合と比較して、「H交差点」の表示が増加している。
【0069】
表示制御部106Dが表示操作部110Aに目印リストを表示させているにもかかわらず、ユーザが表示操作部110Aを介して目印を選択しない場合に、抽出部106Cは、記憶部113Aを参照して、図7に示すように、目印を抽出したエリアT2よりもさらに大きなエリアであって、かつ目印を抽出したエリアを包含するエリアT3内の目印を抽出し直す。たとえば、抽出部106Cは、目印データベース113Yから「Eビル」や「G店」や「H交差点」や「C交差点」などを抽出する。
【0070】
図10は、第3のエリアT3の目印がリスト表示された状態を示す第3のイメージ図である。図10に示すように、表示制御部106Dは、表示操作部110Aに抽出部106Cによって抽出された目印を選択可能に表示させる。具体的には、図9に示す場合と比較して、「C交差点」の表示が増加している。
【0071】
ただし、通知部106Eは、選択された目印を中心にした地図が表示された場合において、所定時間接触位置が検知されない場合に、あるいは他の移動方向に位置する目印を抽出する命令を受け付けた場合に、移動端末を他の移動方向へ移動させるように外部へ通知してもよい。そして、抽出部106Cが、記憶部113Aを参照して、予想現在位置と方向取得部107Aが取得した新たな移動方向とに基づき他の目印を抽出し直してもよい。
【0072】
図11は、予想現在位置Oと第4のエリアT4と目印との位置関係を示すイメージ図である。図11に示すように、抽出部106Cは、予想現在位置Oと新たな移動方向とに基づいて、記憶部113Aから、予想現在位置Oから新たな移動方向の方向に位置する(エリアT4内に位置する)目印を抽出する。たとえば、抽出部106Cは、目印データベース113Yから「B駅」や「F店」などを抽出する。なお、目印データベース113Yの「Eビル」や「G店」は、予想現在位置Oから新たな移動方向の方向に位置するものではないため、抽出部106Cは「Eビル」や「G店」を抽出していない。
【0073】
図12は、第4のエリアT4の目印がリスト表示された状態を示す第4のイメージ図である。図12に示すように、表示制御部106Dは、表示操作部110Aに、抽出部106Cによって抽出し直された目印を選択可能に表示させる。具体的には、「B駅」や「F店」などのような目印名が選択可能に列挙されて表示される。
【0074】
そして、表示制御部106Dは、記憶部113Aを参照して、表示操作部110Aに、予め選択されたエリアT1内の目印と新たに選択されたエリアT4内の目印との中間地点を中心とした地図を表示させる。
【0075】
<PND100における現在位置表示処理>
次に、本実施の形態に係るPND100における現在位置表示処理について説明する。図13は、本実施の形態に係るPND100における現在位置表示処理の処理手順を示すフローチャートである。
【0076】
図13に示すように、ユーザがPND100に現在位置の測位を開始する旨の命令を入力すると(ステップS102にてYESである場合)、CPU106はGPS信号を待ち受ける(ステップS104)。CPU106がGPS信号を受信すると(ステップS104にてYESである場合)、CPU106は測定現在位置を取得する(ステップS106)。より詳細には、CPU106は、所定期間内に受信した所定数のGPS信号に基づいて、所定数の測定現在位置を取得する(ステップS106)。
【0077】
CPU106は、所定数の測定現在位置に基づいて、予想現在位置を演算し、タッチパネル110に予想現在位置を中心とした地図を表示させる(ステップS108)。そして、CPU106はPND100がマルチパス環境下であるか否かを判断する(ステップS110)。より詳細には、CPU106は、所定数の測定現在位置のバラツキ具合を示す指標(たとえば、所定数の測定現在位置のX座標またはY座標の標準偏差)が第1の所定値以上であるか否かを判断する。
【0078】
CPU106は、所定数の測定現在位置のバラツキ具合を示す指標が第1の所定値未満である場合(ステップS110にてNOである場合)、ステップS104からの処理を繰り返す。
【0079】
一方、CPU106は、所定数の測定現在位置のバラツキ具合を示す指標が第1の所定値以上である場合(ステップS110にてYESである場合)、タッチパネル110を介してユーザから地図上の現在位置を指定する命令を受け付ける(ステップS112)。CPU106は、地図上の現在位置を指定する命令を受け付けると、すなわちタッチパネル110に対する接触を検知すると(ステップS112にてYESである場合)、その命令に基づいて現在位置補正処理(ステップS300)を実行する。現在位置補正処理(ステップS300)については後述する。CPU106は、現在位置補正処理(ステップS300)後、自律航法を実行する(ステップS114)。
【0080】
一方、CPU106は、ユーザから地図上の現在位置を指定する命令が入力されない場合、すなわちタッチパネル110に対する接触が検知されない場合(ステップS112にてNOである場合)、マルチパス処理(ステップS200)を実行する。マルチパス処理(ステップS200)については後述する。
【0081】
マルチパス処理(ステップS200)が完了すると、CPU106は、自律航法を実行する(ステップS114)。自律航法(ステップS114)においては、CPU106は、マルチパス処理(ステップS200)にて取得した予想現在位置と、方向取得部107Aからの移動ベクトルとに基づいて予想現在位置を更新する。そして、CPU106は、所定期間毎にPND100がマルチパス環境下にあるか否かを判断する(ステップS116)。すなわち、CPU106は、定期的にGPS信号の受信を試みて、測定現在位置のバラツキが小さくなったか否かを判断する。
【0082】
そして、CPU106は、PND100がマルチパス環境下にある場合(ステップS116にてYESである場合)には自律航法を続行する(ステップS114)。一方、CPU106は、PND100がマルチパス環境下でなくなると(ステップS116にてNOである場合)、ステップS104からの処理を繰り返す。
【0083】
<PND100におけるマルチパス処理>
次に、本実施の形態に係るPND100におけるマルチパス処理について説明する。図14は、本実施の形態に係るPND100におけるマルチパス処理の処理手順を示すフローチャートである。
【0084】
図14に示すように、マルチパス処理(ステップS200)においては、まず、CPU106が、タッチパネル110やスピーカ109に、ユーザに歩行を促す旨の通知を行わせる(ステップS202)。具体的には、タッチパネル110が「2歩以上歩いて下さい。」という表示を行ったり、スピーカ109が「2歩以上歩いて下さい。」という音声を出力したりする。PND100を保持しているユーザが移動することにより、加速度センサ108がPND100自身の加速度を取得すると、CPU106は、加速度と地磁気センサ107が取得したPND100の向きとに基づいて、PND100の移動方向を取得する(ステップS204)。
【0085】
CPU106は、PND100の移動方向を取得すると(ステップS204にてYESである場合)、予想現在位置と移動方向とに基づいて、目印データベース113Yを参照して、目印を抽出する(ステップS206)。より詳細には、CPU106は、予想現在位置を始点とした、移動方向にある程度の幅(たとえば約60度)を持ったエリアT1内に位置する目印を抽出する。CPU106は、タッチパネル110に抽出した目印をリスト表示させる(ステップS208)。CPU106は、目印の選択を受け付ける(ステップS210)。
【0086】
CPU106が目印の選択を受け付けない場合(ステップS210にてNOである場合)、CPU106は目印を抽出するためのエリアT1を広げることが可能であるか否かを判断する(ステップS212)。たとえば、図7に示すように、CPU106は、目印を抽出したエリアT1が、予想現在位置から所定距離以内である円エリアSよりも未だ小さい場合、エリアT1を広げることが可能であると判断する。図14に戻って、エリアをさらに広げることが不可能な場合(ステップS212にてNOである場合)、CPU106はタッチパネル110にエラー表示をさせる(ステップS216)。
【0087】
エリアを広げることが可能である場合(ステップS212にてYESである場合)、CPU106はタッチパネル110にエリアを拡大する命令を受け付けるボタンを表示させる(ステップS214)。すなわち、CPU106は、エリアを拡大する旨の命令を待ち受ける。エリアを拡大する旨の命令が入力されると(ステップS218にてYESである場合)、CPU106は目印を抽出するためのエリアを拡大する(ステップS220)。より詳細には、CPU106は、予想現在位置から移動方向と逆向きに数m移動した位置を始点として、移動方向にある程度の幅を持ったエリアT2内に位置する目印を抽出する(ステップS206)。そして、CPU106は、ステップS206からの処理を繰り返す。
【0088】
エリアを拡大する旨の命令が入力されない場合(ステップS218にてNOである場合)、CPU106は引き続き目印の選択を待ち受ける(ステップS210)。
【0089】
CPU106が目印の選択を受け付けた場合(ステップS210にてYESである場合)には、図3に示すように、CPU106は目印データベース113Yにおける選択された目印に対応するフラグをONする(ステップS222)。
【0090】
後述するように、このとき、目印データベース113Yにおいては、複数の目印に対応するフラグがONされている場合がある。CPU106は、目印データベース113Yに基づいて、マルチパス処理(ステップS200)において選択された全ての目印、すなわちフラグがONされている全ての目印の中心座標を取得する。
【0091】
図14に戻って、CPU106は、地図データベース113Xを参照して、タッチパネル110に、その中心座標を実質的に中心とした地図を表示させる(ステップS224)。そして、CPU106は、タッチパネル110に、地図を表示させるとともに、移動方向を変更する旨の命令を受け付けるボタンを表示させる(ステップS226)。すなわち、CPU106は、ユーザに地図を表示することによって地図上の位置の指定を待ち受けつつ、ユーザから移動方向を変更する旨の命令を待ち受ける(ステップS228)。
【0092】
ユーザがタッチパネル110を介して地図上の1点を指定すると(ステップS228にてYESである場合)、すなわちユーザがスタイラスペンや指を介してタッチパネル110上の地図に接触すると、CPU106は現在位置補正処理(ステップS300)を実行する。
【0093】
一方、ユーザがタッチパネル110を介して地図上の1点を指定することなく(ステップS228にてNOである場合)、ユーザが移動方向を変更する旨の命令を入力すると(ステップS230にてYESである場合)、CPU106はステップS202からの処理を繰り返す。このように、目印データベース113Yにおいて、複数の目印に対応するフラグがONされることがあり得る。
【0094】
より詳細には、ユーザが新たに他の方向に移動することにより(ステップS204)、CPU106がその新たな他の移動方向と予想現在位置とから目印を抽出し直す(ステップS206)。新たな目印が選択されると(ステップS210にてYESである場合)、図3に示すように、CPU106は、目印データベース113Yにおける新たに選択された目印に対応するフラグをONする(ステップS222)。そして、CPU106は、目印データベース113Yに基づいて、今回のマルチパス処理(200)において選択された全ての目印の中心座標を取得する。図14に戻って、CPU106は、地図データベース113Xを参照して、タッチパネル110に、その中心座標を実質的に中心とした地図を表示させる(ステップS224)。
【0095】
<PND100における現在位置補正処理>
次に、本実施の形態に係るPND100における現在位置補正処理について説明する。図15は、本実施の形態に係るPND100における現在位置補正処理の処理手順を示すフローチャートである。
【0096】
図15に示すように、現在位置補正処理(ステップS300)においては、CPU106が、タッチパネル110への接触位置を検知する(ステップS302)。CPU106は、接触位置に対応する地図上の位置座標を取得する(ステップS304)。より詳細には、CPU106は、ユーザが接触したタッチパネル110上の位置(画素)のタッチパネル110の中心(またはタッチパネル110の角部)に対する相対位置と、現在表示されている地図の中心座標とに基づいて、次に表示する地図の中心座標を演算する。
【0097】
そして、CPU106は、地図データベース113Xを参照して、タッチパネル110に、その中心座標を実質的に中心とした地図を表示させる(ステップS306)。その後、図13〜図15に示すように、CPU106は、上記のようにして取得されたより正確な現在位置を初期位置として自律航法を実行する(ステップS114)。
【0098】
このようにして、本実施の形態に係るPND100は、マルチパス環境においても正確な現在位置を取得することができ、その後の自律航法の精度を向上させることができる。
【0099】
また、PND100がより正確な現在位置を取得するためには、目印を選択するための円エリアS内に多くの目印が設定される必要がある。しかしながら、円エリアS内に設定される目印が多くなればなるほど、ユーザが目印リストから目印を選択し難くなる。本実施の形態に係るPND100は、ユーザに、ユーザが移動した方向の目印を選択させるため、ユーザはリスト表示された目印を容易に選択することができる。
【0100】
さらに、本実施の形態に係るPND100はユーザが選択した目印を中心とした地図を表示するため、ユーザが表示されている地図の中心に位置する建物さえも把握できない場合と比較して、ユーザが地図上における自身の現在位置を容易に認識することができる。その結果、ユーザは、タッチパネルへの接触動作などによって、PND100に正確な現在位置を容易に入力することができる。
【0101】
<その他の実施の形態>
本発明は、システム或いは装置にプログラムを供給することによって達成される場合にも適用できることはいうまでもない。そして、本発明を達成するためのソフトウェアによって表されるプログラムを格納した記憶媒体を、システム或いは装置に供給し、そのシステム或いは装置のコンピュータ(又はCPUやMPU)が記憶媒体に格納されたプログラムコードを読出し実行することによっても、本発明の効果を享受することが可能となる。
【0102】
この場合、記憶媒体から読出されたプログラムコード自体が前述した実施の形態の機能を実現することになり、そのプログラムコードを記憶した記憶媒体は本発明を構成することになる。
【0103】
プログラムコードを供給するための記憶媒体としては、例えば、ハードディスク、光ディスク、光磁気ディスク、CD−ROM、CD−R、磁気テープ、不揮発性のメモリカード(ICメモリカード)、ROM(マスクROM、フラッシュEEPROMなど)などを用いることができる。
【0104】
また、コンピュータが読出したプログラムコードを実行することにより、前述した実施の形態の機能が実現されるだけでなく、そのプログラムコードの指示に基づき、コンピュータ上で稼動しているOS(オペレーティングシステム)などが実際の処理の一部または全部を行い、その処理によって前述した実施の形態の機能が実現される場合も含まれることは言うまでもない。
【0105】
さらに、記憶媒体から読み出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書き込まれた後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPUなどが実際の処理の一部または全部を行い、その処理によって前述した実施の形態の機能が実現される場合も含まれることは言うまでもない。
【0106】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した説明ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0107】
【図1】本実施の形態に係る移動端末の一例であるPNDのハードウェア構成を示す制御ブロック図である。
【図2】本実施の形態に係る移動端末の機能構成を示すブロック図である。
【図3】記憶部に記憶されている目印データベースのデータ構造を示すイメージ図である。
【図4】記憶部に記憶されている位置データベースのデータ構造を示すイメージ図である。
【図5】予想現在位置と目印との位置関係を示す第1のイメージ図である。
【図6】目印がリスト表示された状態を示すイメージ図である。
【図7】予想現在位置と各エリアと目印との位置関係を示すイメージ図である。
【図8】第1のエリアの目印がリスト表示された状態を示す第1のイメージ図である。
【図9】第2のエリアの目印がリスト表示された状態を示す第2のイメージ図である。
【図10】第3のエリアの目印がリスト表示された状態を示す第3のイメージ図である。
【図11】予想現在位置と第4のエリアと目印との位置関係を示すイメージ図である。
【図12】第4のエリアの目印がリスト表示された状態を示す第4のイメージ図である。
【図13】本実施の形態に係るPNDにおける現在位置表示処理の処理手順を示すフローチャートである。
【図14】本実施の形態に係るPNDにおけるマルチパス処理の処理手順を示すフローチャートである。
【図15】本実施の形態に係るPNDにおける現在位置補正処理の処理手順を示すフローチャートである。
【符号の説明】
【0108】
100 PND、101 無線通信部、102 GPS信号処理部、102A 位置取得部、103 RAM、104 ROM、105 電池、106 CPU、106A 演算処理部、107 地磁気センサ、107A 方向取得部、108 加速度センサ、109 スピーカ、110 タッチパネル、111 通信アンテナ、112 測位アンテナ、113 HDD、113A 記憶部、113X 地図データベース、113Y 目印データベース、113Z 位置データベース、S,T1,T2,T3,T4 目印抽出エリア。
【特許請求の範囲】
【請求項1】
移動端末であって、
表示部と、
地図を表示するための地図データと、位置座標に対応付けられた目印とを記憶する記憶部と、
前記移動端末の予想現在位置を取得する位置取得手段と、
前記移動端末の移動方向を取得する方向取得手段と、
前記記憶部を参照して、前記予想現在位置と前記移動方向とに基づき、前記予想現在位置の周辺に位置する目印を抽出する抽出手段と、
前記表示部に、前記抽出手段によって抽出された目印を選択可能に表示させる表示制御手段と、
前記目印の選択を受け付ける操作部とを備え、
前記表示制御手段は、前記記憶部を参照して、前記表示部に、選択された前記目印を実質的に中心とした地図を表示させる、移動端末。
【請求項2】
前記抽出手段は、前記記憶部を参照して、前記予想現在位置から所定距離以内であって、前記予想現在位置から前記移動方向の方向に位置する目印を抽出する、請求項1に記載の移動端末。
【請求項3】
前記表示部と前記操作部とを含むタッチパネルをさらに備え、
前記表示制御手段は、前記記憶部を参照して、前記表示部に、前記タッチパネルによって検知された接触位置に対応する地点を実質的に中心とした地図を表示させる、請求項1または2に記載の移動端末。
【請求項4】
前記位置取得手段は、所定期間内に取得した複数の測定現在位置に基づいて前記予想現在位置を演算し、
前記表示制御手段は、前記記憶部を参照して、前記表示部に、前記予想現在位置を実質的に中心とした地図を表示させ、
前記複数の測定現在位置の偏差に関する値が所定値以上であるか否かを判断する判断手段をさらに備え、
前記抽出手段は、前記複数の測定現在位置の偏差に関する値が所定値以上である場合に、前記記憶部を参照して、前記予想現在位置に基づき、前記予想現在位置の周辺に位置する目印を抽出する、請求項1から3のいずれか1項に記載の移動端末。
【請求項5】
前記目印が選択されない場合に、前記移動端末を移動させるように外部へ通知する通知手段をさらに備え、
前記抽出手段は、前記方向取得手段が前記移動方向を取得した際に、前記記憶部を参照して、前記予想現在位置と前記移動方向とに基づき、前記予想現在位置の周辺に位置する目印を抽出し直す、請求項4に記載の移動端末。
【請求項6】
前記判断手段は、前記移動端末の電源が投入されたときに、あるいは前記位置取得手段が第1の所定期間以上空けて前記測定現在位置を取得したときに、前記複数の測定現在位置の偏差に関する値が第1の所定値以上であるか否かを判断する、請求項4または5に記載の移動端末。
【請求項7】
前記抽出手段は、前記目印が選択されない場合に、前記記憶部を参照して、前記目印を抽出したエリアよりも大きなエリアであって、かつ前記目印を抽出したエリアを包含するエリア内の目印を抽出し直す、請求項1から6のいずれか1項に記載の移動端末。
【請求項8】
前記目印が選択された場合であって、かつ接触位置が検知されない場合に、前記移動端末を他の移動方向へ移動させるように外部へ通知する通知手段をさらに備え、
前記抽出手段は、前記記憶部を参照して、前記予想現在位置と前記他の移動方向とに基づき他の目印を抽出し直し、
前記表示制御手段は、前記表示部に、前記抽出手段によって抽出された前記他の目印を選択可能に表示させ、
前記表示制御手段は、前記記憶部を参照して、選択された前記目印と選択された前記他の目印の中間地点を中心とした地図を表示させる、請求項3に記載の移動端末。
【請求項9】
移動端末における現在位置表示方法であって、
前記移動端末は、
表示部と、
地図を表示するための地図データと、位置座標に対応付けられた目印とを記憶する記憶部と、
前記移動端末の予想現在位置を取得する位置取得手段と、
前記移動端末の移動方向を取得する方向取得手段と、
前記移動端末の各部を制御する制御部とを備え、
前記現在位置表示方法は、
前記制御部が、前記記憶部を参照して、前記予想現在位置と前記移動方向とに基づき、前記予想現在位置の周辺に位置する目印を抽出するステップと、
前記制御部が、前記表示部に、前記抽出するステップにて抽出された目印を選択可能に表示させるステップと、
前記制御部が、前記目印の選択を受け付けるステップと、
前記制御部が、前記記憶部を参照して、前記表示部に、選択された前記目印を中心とした地図を表示させるステップとを備える、現在位置表示方法。
【請求項10】
移動端末に現在位置を表示させるための現在位置表示プログラムであって、
前記移動端末は、
表示部と、
地図を表示するための地図データと、位置座標に対応付けられた目印とを記憶する記憶部と、
前記移動端末の予想現在位置を取得する位置取得手段と、
前記移動端末の移動方向を取得する方向取得手段と、
前記移動端末の各部を制御する制御部とを備え、
前記現在位置表示プログラムは、前記制御部に、
前記記憶部を参照して、前記予想現在位置と前記移動方向とに基づき、前記予想現在位置の周辺に位置する目印を抽出するステップと、
前記表示部に、前記抽出するステップにて抽出された目印を選択可能に表示させるステップと、
前記目印の選択を受け付けるステップと、
前記記憶部を参照して、前記表示部に、選択された前記目印を中心とした地図を表示させるステップとを実行させる、現在位置表示プログラム。
【請求項1】
移動端末であって、
表示部と、
地図を表示するための地図データと、位置座標に対応付けられた目印とを記憶する記憶部と、
前記移動端末の予想現在位置を取得する位置取得手段と、
前記移動端末の移動方向を取得する方向取得手段と、
前記記憶部を参照して、前記予想現在位置と前記移動方向とに基づき、前記予想現在位置の周辺に位置する目印を抽出する抽出手段と、
前記表示部に、前記抽出手段によって抽出された目印を選択可能に表示させる表示制御手段と、
前記目印の選択を受け付ける操作部とを備え、
前記表示制御手段は、前記記憶部を参照して、前記表示部に、選択された前記目印を実質的に中心とした地図を表示させる、移動端末。
【請求項2】
前記抽出手段は、前記記憶部を参照して、前記予想現在位置から所定距離以内であって、前記予想現在位置から前記移動方向の方向に位置する目印を抽出する、請求項1に記載の移動端末。
【請求項3】
前記表示部と前記操作部とを含むタッチパネルをさらに備え、
前記表示制御手段は、前記記憶部を参照して、前記表示部に、前記タッチパネルによって検知された接触位置に対応する地点を実質的に中心とした地図を表示させる、請求項1または2に記載の移動端末。
【請求項4】
前記位置取得手段は、所定期間内に取得した複数の測定現在位置に基づいて前記予想現在位置を演算し、
前記表示制御手段は、前記記憶部を参照して、前記表示部に、前記予想現在位置を実質的に中心とした地図を表示させ、
前記複数の測定現在位置の偏差に関する値が所定値以上であるか否かを判断する判断手段をさらに備え、
前記抽出手段は、前記複数の測定現在位置の偏差に関する値が所定値以上である場合に、前記記憶部を参照して、前記予想現在位置に基づき、前記予想現在位置の周辺に位置する目印を抽出する、請求項1から3のいずれか1項に記載の移動端末。
【請求項5】
前記目印が選択されない場合に、前記移動端末を移動させるように外部へ通知する通知手段をさらに備え、
前記抽出手段は、前記方向取得手段が前記移動方向を取得した際に、前記記憶部を参照して、前記予想現在位置と前記移動方向とに基づき、前記予想現在位置の周辺に位置する目印を抽出し直す、請求項4に記載の移動端末。
【請求項6】
前記判断手段は、前記移動端末の電源が投入されたときに、あるいは前記位置取得手段が第1の所定期間以上空けて前記測定現在位置を取得したときに、前記複数の測定現在位置の偏差に関する値が第1の所定値以上であるか否かを判断する、請求項4または5に記載の移動端末。
【請求項7】
前記抽出手段は、前記目印が選択されない場合に、前記記憶部を参照して、前記目印を抽出したエリアよりも大きなエリアであって、かつ前記目印を抽出したエリアを包含するエリア内の目印を抽出し直す、請求項1から6のいずれか1項に記載の移動端末。
【請求項8】
前記目印が選択された場合であって、かつ接触位置が検知されない場合に、前記移動端末を他の移動方向へ移動させるように外部へ通知する通知手段をさらに備え、
前記抽出手段は、前記記憶部を参照して、前記予想現在位置と前記他の移動方向とに基づき他の目印を抽出し直し、
前記表示制御手段は、前記表示部に、前記抽出手段によって抽出された前記他の目印を選択可能に表示させ、
前記表示制御手段は、前記記憶部を参照して、選択された前記目印と選択された前記他の目印の中間地点を中心とした地図を表示させる、請求項3に記載の移動端末。
【請求項9】
移動端末における現在位置表示方法であって、
前記移動端末は、
表示部と、
地図を表示するための地図データと、位置座標に対応付けられた目印とを記憶する記憶部と、
前記移動端末の予想現在位置を取得する位置取得手段と、
前記移動端末の移動方向を取得する方向取得手段と、
前記移動端末の各部を制御する制御部とを備え、
前記現在位置表示方法は、
前記制御部が、前記記憶部を参照して、前記予想現在位置と前記移動方向とに基づき、前記予想現在位置の周辺に位置する目印を抽出するステップと、
前記制御部が、前記表示部に、前記抽出するステップにて抽出された目印を選択可能に表示させるステップと、
前記制御部が、前記目印の選択を受け付けるステップと、
前記制御部が、前記記憶部を参照して、前記表示部に、選択された前記目印を中心とした地図を表示させるステップとを備える、現在位置表示方法。
【請求項10】
移動端末に現在位置を表示させるための現在位置表示プログラムであって、
前記移動端末は、
表示部と、
地図を表示するための地図データと、位置座標に対応付けられた目印とを記憶する記憶部と、
前記移動端末の予想現在位置を取得する位置取得手段と、
前記移動端末の移動方向を取得する方向取得手段と、
前記移動端末の各部を制御する制御部とを備え、
前記現在位置表示プログラムは、前記制御部に、
前記記憶部を参照して、前記予想現在位置と前記移動方向とに基づき、前記予想現在位置の周辺に位置する目印を抽出するステップと、
前記表示部に、前記抽出するステップにて抽出された目印を選択可能に表示させるステップと、
前記目印の選択を受け付けるステップと、
前記記憶部を参照して、前記表示部に、選択された前記目印を中心とした地図を表示させるステップとを実行させる、現在位置表示プログラム。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】

【図7】
【図8】
【図9】

【図10】

【図11】

【図12】

【図13】
【図14】

【図15】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2010−32348(P2010−32348A)
【公開日】平成22年2月12日(2010.2.12)
【国際特許分類】
【出願番号】特願2008−194554(P2008−194554)
【出願日】平成20年7月29日(2008.7.29)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
【公開日】平成22年2月12日(2010.2.12)
【国際特許分類】
【出願日】平成20年7月29日(2008.7.29)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
[ Back to top ]