
移動端末及び方法
【課題】自律航法機能を用いてユーザをナビゲートするための移動端末及び方法を提供すること。
【解決手段】本発明の一態様は、ユーザの歩行情報を検出するセンサ部と、前記検出されたユーザの歩行情報に基づき前記ユーザにより指定された出発地点から目的地点までの歩行ルートを示す歩行ルート情報を生成し、前記歩行ルート情報に基づき前記目的地点から前記出発地点までの帰還ルートを示す帰還ルート情報を生成する情報処理部とを有する移動端末であって、前記情報処理部は、前記検出されたユーザの歩行情報に基づき単位時間毎の前記ユーザの歩行ルートを示すベクトルデータを生成し、前記単位時間毎のベクトルデータから前記出発地点から前記目的地点までのベクトルデータ系列を前記歩行ルート情報として生成し、前記ベクトルデータ系列に対してベクトル反転処理を実行することによって前記帰還ルート情報を生成する移動端末に関する。
【解決手段】本発明の一態様は、ユーザの歩行情報を検出するセンサ部と、前記検出されたユーザの歩行情報に基づき前記ユーザにより指定された出発地点から目的地点までの歩行ルートを示す歩行ルート情報を生成し、前記歩行ルート情報に基づき前記目的地点から前記出発地点までの帰還ルートを示す帰還ルート情報を生成する情報処理部とを有する移動端末であって、前記情報処理部は、前記検出されたユーザの歩行情報に基づき単位時間毎の前記ユーザの歩行ルートを示すベクトルデータを生成し、前記単位時間毎のベクトルデータから前記出発地点から前記目的地点までのベクトルデータ系列を前記歩行ルート情報として生成し、前記ベクトルデータ系列に対してベクトル反転処理を実行することによって前記帰還ルート情報を生成する移動端末に関する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自律航法機能を利用した移動端末のためのナビゲーション技術に関する。
【背景技術】
【0002】
近年、郊外などにおいて大型商業施設の普及が拡大している。このような大型商業施設では、利用者のために大規模な駐車場が確保されている反面、買い物等の目的を終えて利用者が帰宅しようとする際に、自分の停めた車を見つけにくいといったデメリットも併せ持っている。
【0003】
従来、このような大規模な駐車場内において自分の車の駐車位置を通知してくれるシステムとして、車両に搭載したGPS受信機を利用したシステム、RFIC(Radio Frequency Integrated Circuit)を利用したシステム、複数の無線基地局を利用したシステムなどが知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−345200
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、これらのシステムは一般に利用者が簡易に利用できるものでないという問題点がある。すなわち、GPS受信機を利用したシステムでは、屋内や地下の駐車場では利用できないなど、利用環境が制限される。また、RFICを利用したシステムでは、RFICタグやRFICリーダを各駐車場やユーザの移動端末等に搭載する必要があり、このためのコストなどインフラ構築のための負荷が大きい。さらに、複数の無線基地局を利用したシステムでは、ナビゲーションを実現可能な精度により達成するため、所定の空間にメッシュの無線エリアを形成する必要があり、このような複数の無線基地局を配置するインフラ構築の負荷が大きい。
【0006】
他方、移動端末の高度化により、加速度センサなどの小型慣性センサの移動端末への搭載が一般的になっており、移動端末で取得したセンサデータを処理して移動軌跡を求める自律航法技術の開発が進められている。
【0007】
従って、本発明の課題は、上述した従来システムの問題点を鑑み、自律航法機能を用いてユーザをナビゲートするための移動端末及び方法を提供することである。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明の一態様は、ユーザの歩行情報を検出するセンサ部と、前記検出されたユーザの歩行情報に基づき前記ユーザにより指定された出発地点から目的地点までの歩行ルートを示す歩行ルート情報を生成し、前記歩行ルート情報に基づき前記目的地点から前記出発地点までの帰還ルートを示す帰還ルート情報を生成する情報処理部とを有する移動端末であって、前記情報処理部は、前記検出されたユーザの歩行情報に基づき単位時間毎の前記ユーザの歩行ルートを示すベクトルデータを生成し、前記単位時間毎のベクトルデータから前記出発地点から前記目的地点までのベクトルデータ系列を前記歩行ルート情報として生成し、前記ベクトルデータ系列に対してベクトル反転処理を実行することによって前記帰還ルート情報を生成する移動端末に関する。
【発明の効果】
【0009】
本発明によると、自律航法機能を用いてユーザをナビゲートするための移動端末及び方法を提供することができる。
【図面の簡単な説明】
【0010】
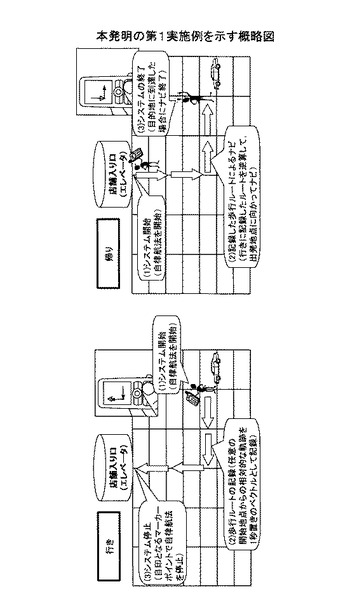
【図1】図1は、本発明の第1実施例を示す概略図である。
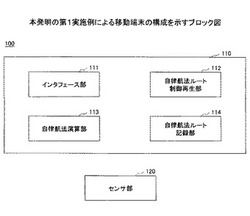
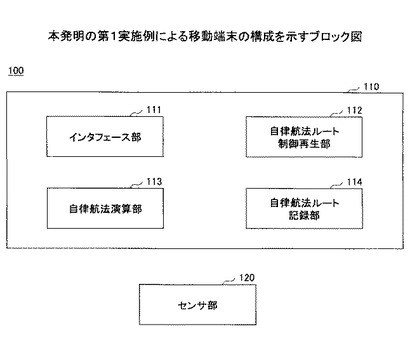
【図2】図2は、本発明の第1実施例による移動端末の構成を示すブロック図である。
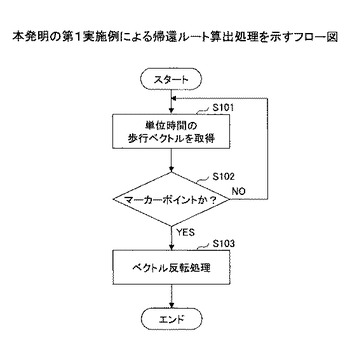
【図3】図3は、本発明の第1実施例による帰還ルート算出処理を示すフロー図である。
【図4】図4は、本発明の第1実施例による帰還ルートナビゲート処理を示すフロー図である。
【図5】図5は、本発明の第2実施例を示す概略図である。
【図6】図6は、本発明の第2実施例による移動端末の構成を示すブロック図である。
【図7】図7は、本発明の第2実施例による帰還ルート算出処理を示すフロー図である。
【図8】図8は、本発明の第2実施例による帰還ルートナビゲート処理を示すフロー図である。
【発明を実施するための形態】
【0011】
以下、図面に基づいて本発明の実施の形態を説明する。
【0012】
以下の実施例では、特別なインフラ装置を設置する必要なく、移動端末の自律航法機能を利用してユーザを駐車した位置にナビゲートする駐車場案内システムに関して本発明が説明される。具体的には、ユーザが車を駐車した駐車地点から来店先店舗や店舗入口などの所望の目的地点(マーカーポイント)に移動する往路において、移動端末は、搭載された各種センサからの測定結果に基づき駐車地点からマーカーポイントまでのルート情報を取得する。このルート情報は、1秒などの各単位時間においてセンサにより測定されたユーザの歩行距離又は歩数と進行方向とに基づき取得されるベクトルデータの時系列からなる。移動端末は、このベクトルデータ系列をベクトル反転させることによって、当該マーカーポイントから駐車地点までの帰還ルート情報を算出する。その後、当該目的地点から駐車地点までの帰路において、移動端末は、算出した帰還ルート情報に基づきユーザに帰還ルートをナビゲートする。
【0013】
なお、以下の実施例では、駐車場案内システムに関して本発明が説明されるが、本発明はこれに限定されるものでない。すなわち、本発明は、自律航法機能を利用してユーザによって指定された出発地点からマーカーポイントまでのユーザの歩行ルート情報を取得し、当該マーカーポイントから出発地点までの帰還ルート情報をユーザにナビゲートする他の何れか適切な移動端末に適用可能である。
【0014】
図1〜4を参照して、本発明の第1実施例による移動端末を説明する。第1実施例では、駐車場に車を駐車したユーザが、駐車地点から所望の店舗や店舗入口などに向かって歩行するとき、センサにより測定された歩行中のユーザの単位時間毎のベクトルデータの時系列から駐車地点からマーカーポイントまでのルート情報を取得する。ユーザが所望の店舗や店舗入口などに到着して当該地点をマーカーポイントとして指定すると、移動端末は、駐車始点からマーカーポイントまでの間に取得したベクトルデータ系列をベクトル反転させ、マーカーポイントから駐車地点までの帰還ルートを算出及び格納する。ユーザが用事を済ませマーカーポイントから駐車地点まで帰るとき、移動端末は、格納されている帰還ルートをユーザに提示してユーザを駐車地点までナビゲートする。
【0015】
まず図1を参照して、本発明の第1実施例の概略を説明する。図1は、本発明の第1実施例を示す概略図である。駐車地点から店舗入口に向かう往路において、図1の左側に示されるように、駐車場に車を駐車したユーザは、駐車地点において移動端末のユーザインタフェースを操作して帰還ルートナビゲーションシステムを起動させる。帰還ルートナビゲーションシステムが起動されると、移動端末は、自律航法機能を起動して、1秒毎などの所定の単位時間毎にユーザの歩行距離と進行方向とをセンサに測定させ、測定された歩行距離と進行方向との測定データから単位時間毎のベクトルデータの時系列を生成し、駐車地点から歩行中の現在地点までの相対的な軌跡である歩行ルートを取得する。ユーザが店舗入口に到着し、ユーザインタフェースを操作して当該地点をマーカーポイントして指定すると、移動端末は、ベクトルデータ系列の生成を終了し、駐車地点からマーカーポイントまでのベクトルデータ系列から歩行ルート情報を生成する。その後、移動端末は、生成した歩行ルート情報のベクトルデータ系列の各ベクトルデータをベクトル反転させ、帰還ルート情報を算出及び記録する。その後、ユーザが用事を済ませて車に戻る帰路において、図1の右側に示されるように、マーカーポイントに到着したユーザは、マーカーポイントにおいて移動端末のユーザインタフェースを操作して帰還ルートナビゲーションシステムを起動させる。帰還ルートナビゲーションシステムが起動されると、移動端末は、ユーザインタフェースを介し帰還ルートをユーザにガイドすると共に、自律航法機能を起動してユーザの歩行状態を測定し、帰還ルートに従って駐車地点までユーザを適切にナビゲートする。
【0016】
次に図2を参照して、本発明の第1実施例による移動端末の構成を説明する。第1実施例による移動端末は、典型的には、携帯電話、スマートフォン、携帯端末などである。移動端末は、典型的には、補助記憶装置、メモリ装置、CPU、通信装置、表示装置、入力装置、センサ装置などの各種ハードウェアリソースの1以上から構成される。補助記憶装置は、ハードディスクやフラッシュメモリなどから構成され、後述される各種処理を実現するプログラムやデータを格納する。メモリ装置は、RAM(Random Access Memory)などから構成され、プログラムの起動指示があった場合に、補助記憶装置からプログラムを読み出して格納する。CPUは、情報を処理するプロセッサとして機能し、メモリ装置に格納されたプログラムに従って後述される各種機能を実現する。表示装置は、ディスプレイなどから構成され、ディスプレイ上に情報を表示する。入力装置は、典型的には、操作ボタン、キーボード、マウス等で構成され、移動端末のユーザが様々な操作命令を入力するのに用いられる。センサ装置は、自律航法機能を実現するための移動端末の動きを測定するための加速度センサ、地磁気センサ、ジャイロセンサなどの各種センサから構成される。なお、本発明による移動端末は、上述したハードウェア構成に限定されるものでなく、後述する各種機能を実現可能な回路等の他の何れか適切なハードウェア構成を有してもよい。
【0017】
図2は、本発明の第1実施例による移動端末の構成を示すブロック図である。図2に示されるように、移動端末100は、情報処理部110とセンサ部120とを有する。情報処理部110は、CPU、メモリ装置、補助記憶装置などにより実現され、センサ部120は、加速度センサ、地磁気センサ、ジャイロセンサなどの各種センサにより実現される。
【0018】
情報処理部110は、往路において帰還ルートナビゲーションシステムが起動されると、センサ部120から取得したセンサデータに基づき駐車地点からマーカーポイントまでのユーザの歩行ルート情報を生成し、生成した歩行ルート情報に基づき帰還ルートを算出する。さらに、情報処理部110は、帰路において帰還ルートナビゲーションシステムが起動されると、往路において算出した帰還ルート情報に基づきユーザを駐車地点までナビゲートする。情報処理部110は、インタフェース部111と、自律航法ルート制御再生部112と、自律航法演算部113と、自律航法ルート記録部114とを有する。
【0019】
インタフェース部111は、移動端末100の入力装置などを介しユーザから帰還ルートナビゲーションシステムの起動指示、往路における帰還ルート算出指示、帰路における帰還ルートナビゲーション指示などの各種操作指示と、マーカーポイントなどの各種入力情報とを受信し、受信した操作指示及び入力情報を自律航法ルート制御再生部112に送信する。また、インタフェース部111は、移動端末100の表示装置などを介し自律航法ルート制御再生部112により再生された帰還ルートと、自律航法演算部113により算出されたユーザの実際の歩行ルートとをユーザに表示することによって、ユーザを駐車地点にナビゲートする。
【0020】
自律航法ルート制御再生部112は、インタフェース部111から帰還ルートナビゲーションシステムの起動指示を受信すると、移動端末100の補助記憶装置に格納されている帰還ルートナビゲーションシステムに対応するプログラムを実行する。帰還ルートナビゲーションシステムの起動後、ユーザからインタフェース部111を介し帰還ルート算出指示を受信すると、自律航法ルート制御再生部112は、自律航法演算部113に現在地点からのユーザの歩行ルートを測定させ、歩行ルート情報を生成するよう指示する。その後、ユーザが店舗入口などに到着してマーカーポイントを指定すると、自律航法ルート制御再生部112は、自律航法演算部113に歩行ルートの測定を終了するよう指示し、測定された駐車地点からマーカーポイントまでの歩行ルート情報を自律航法演算部113から受信する。
【0021】
受信した歩行ルート情報は、駐車地点からマーカーポイントまでの単位時間毎のユーザの移動軌跡を示すベクトルデータの時系列から構成される。例えば、図1の左側の図において、横軸をX軸とし、縦軸をY軸とし、単位時間当たりのユーザの移動距離及び移動方向が図示される各矢印により表されているとする。図示される具体例では、ユーザは、駐車地点から第1単位時間において(−1,0)だけ移動し、第2単位時間において(−1,0)だけ移動し、第3単位時間において(0,2)だけ移動し、第4単位時間において(0,2)だけ移動してマーカーポイントに到着している。すなわち、歩行ルート情報は、(−1,0)→(−1,0)→(0,2)→(0,2)の4つのベクトルデータの時系列により表される。
【0022】
自律航法演算部113からこのような歩行ルート情報を受信すると、自律航法ルート制御再生部112は、対応する帰還ルートを算出するため、受信した歩行ルート情報に対してベクトル反転処理を実行する。具体的には、自律航法ルート制御再生部112は、受信した歩行ルート情報のベクトルデータ系列を時間について逆順すると共に、各ベクトルデータの符号を反転させる。例えば、上述した具体例では、受信した歩行ルート情報が(−1,0)→(−1,0)→(0,2)→(0,2)であるため、上記ベクトル反転処理を実行することによって、(0,−2)→(0,−2)→(1,0)→(1,0)という帰還ルート情報を算出することができる。実際、この帰還ルート情報が、図1の右側の図におけるマーカーポイントから駐車地点までのルートに相当することは容易に理解できるであろう。自律航法ルート制御再生部112は、このようにして算出した帰還ルート情報を自律航法ルート記録部114に格納する。
【0023】
より一般には、自律航法ルート制御再生部112により実行されるベクトル反転処理では、自律航法演算部113から取得した歩行ルート情報(x1,y1)→(x2,y2)→(x3,y3)→・・・→(xn,yn)のベクトルデータ系列の時間的順序が逆転されると共に、各ベクトルデータの符号を反転させることによって、帰還ルート情報(−xn,−yn)→・・・→(−x3,−y3)→(−x2,−y2)→(−x1,−y1)が算出される。
【0024】
さらに、ユーザが用事を済ませマーカーポイントから駐車地点に戻る際、マーカーポイントにおいて帰還ルートナビゲーションシステムの起動指示と帰路における帰還ルートナビゲーション指示とをユーザが移動端末100の入力装置に入力すると、自律航法ルート制御再生部112は、インタフェース部111を介しこれらの指示を受信し、帰還ルートナビゲート処理を開始する。すなわち、自律航法ルート制御再生部112は、自律航法ルート記録部114から往路において算出した帰還ルート情報を取得し、取得した帰還ルート情報に基づきインタフェース部111を介しユーザを駐車地点までナビゲートする。この帰還ルートナビゲート処理において、自律航法ルート制御再生部112は、典型的には、自律航法演算部113にユーザの実際の歩行ルートを測定させ、測定したユーザの実際の歩行ルートと帰還ルートとが所定の距離以上乖離すると、ユーザに警告等を通知し、正しい帰還ルートに戻るようナビゲートしてもよい。その後、ユーザが駐車地点に到着すると、自律航法ルート制御再生部112は、当該帰還ルートナビゲート処理を終了する。
【0025】
自律航法演算部113は、自律航法ルート制御再生部112からの指示に応答して、センサ部120から歩行距離又は歩数及び進行方向をセンサ情報として取得し、単位時間毎のベクトルデータを算出する。この単位時間は1秒などに設定されてもよいが、設定される単位時間が短いほど、より精度の高い歩行ルート情報を取得可能である反面、帰還ルートを算出するための計算量が大きくなることが予想される。ここで、歩行距離の算出について、実際上は、センサ部120の加速度センサがユーザの歩数を測定するが、自律航法演算部113が、この測定された歩数に所定のユーザの歩幅を掛け合わせることによって歩行距離を求めるようにしてもよい。
【0026】
自律航法ルート記録部114は、自律航法ルート制御再生部112により算出された帰還ルート情報を格納すると共に、自律航法ルート制御再生部112からの要求に応答して、格納している帰還ルート情報を提供する。
【0027】
センサ部120は、自律航法演算部113からの要求に応答して、歩行距離又は歩数及び進行方向を測定し、測定された歩行距離又は歩数及び進行方向を自律航法演算部113に提供する。
【0028】
次に図3を参照して、本発明の第1実施例による帰還ルート算出処理を説明する。図3は、本発明の第1実施例による帰還ルート算出処理を示すフロー図である。
【0029】
この帰還ルート算出処理は、駐車地点からマーカーポイントまでの往路における処理であり、典型的には、駐車場に車を駐車したユーザが、駐車地点において帰還ルートナビゲーションシステムを起動すると共に、移動端末100に帰還ルート算出指示を入力することにより開始される。
【0030】
ステップS101において、自律航法ルート制御再生部112は、自律航法演算部113にユーザの歩行ルートを測定するよう指示する。この指示に応答して、自律航法演算部113は、センサ部120に所定の単位時間におけるユーザの歩行距離及び進行方向を測定させ、測定された歩行距離及び進行方向から単位時間におけるユーザの歩行ルートを示すベクトルデータを生成する。
【0031】
ステップS102において、自律航法ルート制御再生部112は、インタフェース部111を介しユーザからマーカーポイントに到着したことを示す通知を受信したか判断する。ユーザがまだマーカーポイントに到着しておらず、ユーザからマーカーポイントに到着したことを示す通知を受信していない場合(S102:NO)、当該フローはステップS101に戻り、次の単位時間におけるベクトルデータを取得する。他方、ユーザがマーカーポイントに到着し、ユーザからマーカーポイントに到着したことを示す通知を受信した場合(S102:YES)、当該フローはステップS103に移行する。
【0032】
ステップS103において、自律航法ルート制御再生部112は、自律航法演算部113により生成された駐車地点からマーカーポイントまでのベクトルデータ系列からなる歩行ルート情報を受信し、受信した歩行ルート情報のベクトルデータ系列に対してベクトル反転処理を実行することによって、対応する帰還ルート情報を生成する。すなわち、自律航法ルート制御再生部112は、受信した歩行ルート情報(x1,y1)→(x2,y2)→(x3,y3)→・・・→(xn,yn)のベクトルデータ系列の時間的順序を逆転すると共に、各ベクトルデータの符号を反転させることによって、帰還ルート情報(−xn,−yn)→・・・→(−x3,−y3)→(−x2,−y2)→(−x1,−y1)を生成する。自律航法ルート制御再生部112は、生成した帰還ルート情報を自律航法ルート記録部114に格納し、当該帰還ルート算出処理を終了する。
【0033】
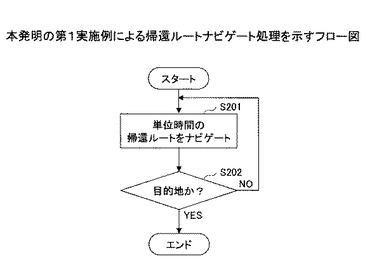
次に図4を参照して、本発明の第1実施例による帰還ルートナビゲート処理を説明する。図4は、本発明の第1実施例による帰還ルートナビゲート処理を示すフロー図である。
【0034】
この帰還ルートナビゲート処理は、マーカーポイントから駐車地点までの帰路における処理であり、典型的には、用事を済ませたユーザが、マーカーポイントにおいて帰還ルートナビゲーションシステムを起動すると共に、移動端末100に帰還ルートナビゲート指示を入力することにより開始される。
【0035】
ステップS201において、自律航法ルート制御再生部112は、自律航法ルート記録部114にアクセスして、格納されている帰還ルート情報を取得する。自律航法ルート制御再生部112は、取得した帰還ルート情報のベクトルデータ系列に基づきインタフェース部111を介しユーザに帰還ルートをナビゲートする。ユーザへのナビゲートは、例えば、移動端末100の表示装置に帰還ルートを表示してもよいし、あるいは又はこれに加えて、音声出力装置などを用いて音声によりナビゲートしてもよい。また、自律航法ルート制御再生部112は、自律航法演算部113にユーザの実際の歩行ルートを測定させ、ユーザが帰還ルートに沿って歩行しているか随時確認する。測定された歩行ルートと帰還ルートとが所定の距離及び/又は所定の角度以上乖離している場合、インタフェース部111を介しユーザにルート修正するようナビゲートしてもよい。
【0036】
ステップS202において、自律航法ルート制御再生部112は、ユーザが帰還ルートの終点である駐車地点に到着したか判断する。ユーザが駐車地点に到着していない場合(S202:NO)、当該フローはステップS201に戻り、帰還ルートナビゲート処理を継続する。他方、ユーザが駐車地点に到着した場合(S202:YES)、当該帰還ルートナビゲート処理は終了される。
【0037】
上述した本発明の第1実施例によると、GPS受信機、RFIC、無線基地局などのインフラ設備を駐車場に設けることなく、移動端末に搭載されている各種センサを用いた自律航法機能を利用して、ユーザに対して帰還ルートをナビゲートすることが可能となる。一般に、このようなセンサを利用した自律航法は、歩幅の相違など個人差の影響を受けやすい。しかしながら、本発明によると、往路と帰路で同一ルートを記録・逆再生するのみであるため、例えば、歩幅が平均より大きいユーザであっても、往路に10mの誤差があれば帰路にも10mの誤差が生じるため、このような個人差の影響を受けることなく精度の高いナビゲートが可能になるという効果を有する。
【0038】
次に、図5〜8を参照して、本発明の第2実施例による移動端末を説明する。第1実施例では、駐車地点とマーカーポイントとが同一フロア上にある場合の帰還ルートナビゲート処理を説明した。第2実施例では、駐車地点とマーカーポイントとが異なるフロア上にある場合の帰還ルートナビゲート処理を説明する。すなわち、本発明の第2実施例は、駐車地点とマーカーポイントとの間に高度差があるケースに適用可能である。この相対高度を検出するため、第2実施例による移動端末は、センサ装置として気圧センサをさらに有する。
【0039】
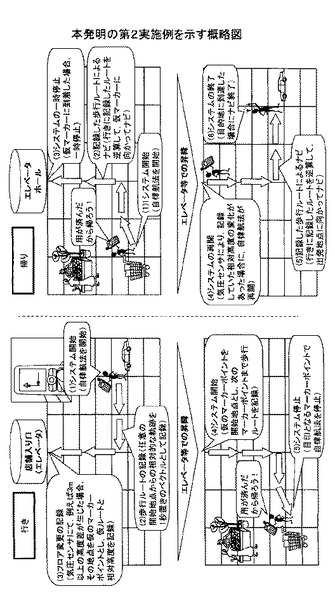
まず図5を参照して、本発明の第2実施例の概略を説明する。図5は、本発明の第2実施例を示す概略図である。駐車地点から店舗入口に向かう往路において、図5の左側に示されるように、駐車場に車を駐車したユーザは、駐車地点において移動端末のユーザインタフェースを操作して帰還ルートナビゲーションシステムを起動させる。帰還ルートナビゲーションシステムが起動されると、移動端末は、自律航法機能を起動して、1秒毎などの所定の単位時間毎にユーザの歩行距離と進行方向とをセンサに測定させ、測定された歩行距離と進行方向との測定データから単位時間毎のベクトルデータの時系列を生成し、駐車地点から歩行中の現在地点までの相対的な軌跡である歩行ルートを取得する。ユーザが店舗入口に到着してエレベータ等で昇降すると、移動端末の気圧センサが昇降に伴う高度変化を検知する。この高度変化が検知されると、移動端末は、フロア変更が行われたと判断し、検知された地点を仮のマーカーポイントとして設定し、駐車地点から仮のマーカーポイントまでの第1歩行ルート情報を取得すると共に、昇降前後の相対高度を記録する。昇降後にユーザが歩行を再開すると、移動端末は、仮のマーカーポイントから歩行ルートのベクトルデータの生成を再開し、仮のマーカーポイントから歩行中の現在地点までの相対的な軌跡である歩行ルートを取得する。ユーザが目的地に到着し、ユーザインタフェースを操作して当該地点をマーカーポイントして指定すると、移動端末は、ベクトルデータの生成を終了し、仮のマーカーポイントからマーカーポイントまでの第2歩行ルート情報を生成する。その後、移動端末は、第1及び第2ルート情報のベクトルデータ系列の各ベクトルデータをそれぞれベクトル反転させ、対応する第1及び第2帰還ルート情報を算出及び記録する。その後、ユーザが用事を済ませて車に戻る帰路において、図5の右側に示されるように、マーカーポイントに到着したユーザは、マーカーポイントにおいて移動端末のユーザインタフェースを操作して帰還ルートナビゲーションシステムを起動させる。帰還ルートナビゲーションシステムが起動されると、移動端末は、格納されている第1及び第2帰還ルートと相対高度とに基づきユーザインタフェースを介しユーザをガイドすると共に、自律航法機能を起動してユーザの歩行状態を測定し、帰還ルートに従って駐車地点までユーザを適切にナビゲートする。なお、以下の実施例では、エレベータ等の昇降が1回しかないケースについて、すなわち、仮のマーカーポイントが1つであるケースについて説明するが、複数回昇降が行われるケースについても同様に適用可能であることは容易に明らかであろう。
【0040】
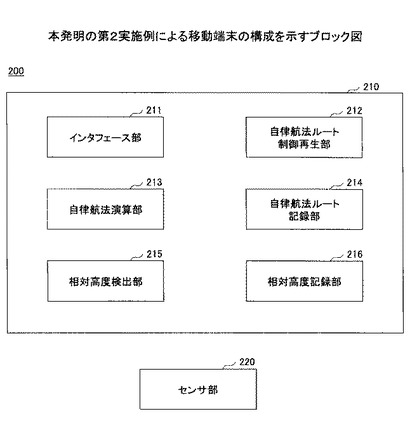
図6は、本発明の第2実施例による移動端末の構成を示すブロック図である。図6に示されるように、移動端末200は、情報処理部210とセンサ部220とを有する。情報処理部210は、CPU、メモリ装置、補助記憶装置などにより実現され、センサ部220は、加速度センサ、地磁気センサ、ジャイロセンサに加えて、高度変化を検知する気圧センサなどの各種センサにより実現される。
【0041】
情報処理部210は、往路において帰還ルートナビゲーションシステムが起動されると、センサ部220から取得した相対高度を含むセンサデータに基づき、駐車地点から高度変化が検知された仮のマーカーポイントまでの第1歩行ルート情報と、昇降後の仮のマーカーポイントからユーザにより指定されたマーカーポイントまでの第2歩行ルート情報とを生成し、生成した第1及び第2歩行ルート情報と相対高度とに基づき帰還ルートを算出する。さらに、情報処理部210は、帰路において帰還ルートナビゲーションシステムが起動されると、往路において算出した帰還ルート情報に基づきユーザを駐車地点までナビゲートする。情報処理部210は、インタフェース部211と、自律航法ルート制御再生部212と、自律航法演算部213と、自律航法ルート記録部214と、相対高度検出部215と、相対高度記録部216とを有する。
【0042】
インタフェース部211は、移動端末200の入力装置などを介しユーザから帰還ルートナビゲーションシステムの起動指示、往路における帰還ルート算出指示、帰路における帰還ルートナビゲーション指示などの各種操作指示と、マーカーポイントなどの各種入力情報とを受信し、受信した操作指示及び入力情報を自律航法ルート制御再生部212に送信する。また、インタフェース部211は、移動端末200の表示装置などを介し自律航法ルート制御再生部212により再生された帰還ルートと、自律航法演算部213により算出されたユーザの実際の歩行ルートとをユーザに表示することによって、ユーザを駐車地点にナビゲートする。
【0043】
自律航法ルート制御再生部212は、インタフェース部211から帰還ルートナビゲーションシステムの起動指示を受信すると、移動端末200の補助記憶装置に格納されている帰還ルートナビゲーションシステムに対応するプログラムを実行する。帰還ルートナビゲーションシステムの起動後、ユーザからインタフェース部211を介し帰還ルート算出指示を受信すると、自律航法ルート制御再生部212は、自律航法演算部213に現在地点からのユーザの歩行ルートを測定させ、歩行ルート情報を生成するよう指示する。さらに、自律航法ルート制御再生部212は、相対高度検出部215にユーザのエレベータ等の昇降に伴う高度変化を検出させる。3mなどのフロア間の移動と判断されうる所定の閾値以上の高度変化が検出されると、自律航法ルート制御再生部212は、高度変化が検出された地点を仮のマーカーポイントとして設定し、駐車地点から仮のマーカーポイントまでの歩行ルートを示すベクトルデータ系列からなる第1歩行ルート情報を生成すると共に、相対高度検出部215により検出されたユーザの昇降前後の相対高度を相対高度記録部216に格納する。昇降後にユーザが歩行を再開したことを検出すると、自律航法ルート制御再生部212は、自律航法演算部213に仮のマーカーポイントから歩行ルートを再び測定させ、ユーザが店舗入口などに到着してマーカーポイントを指定すると、自律航法ルート制御再生部212は、自律航法演算部213に歩行ルートの測定を終了するよう指示し、仮のマーカーポイントから当該マーカーポイントまでの第2歩行ルート情報を自律航法演算部213から受信する。
【0044】
受信した第1歩行ルート情報は、駐車地点から仮のマーカーポイントまでの単位時間毎のユーザの移動軌跡を示すベクトルデータの時系列から構成される。また、受信した第2歩行ルート情報は、仮のマーカーポイントからマーカーポイントまでの単位時間毎のユーザの移動軌跡を示すベクトルデータの時系列から構成される。
【0045】
自律航法演算部213から第1及び第2歩行ルート情報を受信すると、自律航法ルート制御再生部212は、対応する帰還ルートを算出するため、受信した第1及び第2歩行ルート情報のそれぞれに対してベクトル反転処理を実行する。具体的には、自律航法ルート制御再生部212は、受信した第1及び第2歩行ルート情報のそれぞれに対して、ベクトルデータ系列を時間について逆順にすると共に、各ベクトルデータの符号を反転させる。例えば、自律航法演算部213から取得した第1歩行ルート情報と第2歩行ルート情報がそれぞれ、(x11,y11)→(x12,y12)→(x13,y13)→・・・→(x1n,y1n)と(x21,y21)→(x22,y22)→(x23,y23)→・・・→(x2n,y2n)である場合、自律航法ルート制御再生部212は、第1歩行ルート情報と第2歩行ルート情報のベクトルデータ系列のそれぞれに対してベクトル反転処理を実行し、第1帰還ルート情報(−x1n,−y1n)→・・・→(−x13,−y13)→(−x12,−y12)→(−x11,−y11)と、第2帰還ルート情報(−x2n,−y2n)→・・・→(−x23,−y23)→(−x22,−y22)→(−x21,−y21)とを算出し、自律航法ルート記録部214に記録する。
【0046】
さらに、ユーザが用事を済ませマーカーポイントから駐車地点に戻る際、マーカーポイントにおいて帰還ルートナビゲーションシステムの起動指示と帰路における帰還ルートナビゲーション指示とをユーザが移動端末200の入力装置に入力すると、自律航法ルート制御再生部212は、インタフェース部211を介しこれらの指示を受信し、帰還ルートナビゲート処理を開始する。すなわち、自律航法ルート制御再生部212は、自律航法ルート記録部214から往路において算出した第1及び第2帰還ルート情報を取得し、さらに相対高度記録部216から昇降により検出された相対高度を取得し、取得した第1及び第2帰還ルート情報と相対高度とに基づきインタフェース部211を介しユーザを駐車地点までナビゲートする。ここで、自律航法ルート制御再生部212は、まずマーカーポイントから仮のマーカーポイントまでの第2帰還ルート情報に従ってユーザをナビゲートし、フロア間の昇降後に、仮のマーカーポイントから駐車地点までの第2帰還ルート情報に従ってユーザをナビゲートする。
【0047】
この帰還ルートナビゲート処理において、自律航法ルート制御再生部212は、典型的には、自律航法演算部213にユーザの実際の歩行ルートを測定させ、測定した実際の歩行ルートと帰還ルートとが所定の距離以上乖離すると、ユーザに警告等を通知し、正しい帰還ルートに戻るようナビゲートしてもよい。また、自律航法ルート制御再生部212は、相対高度検出部215に高度変化を検出させ、第2帰還ルートの終点(又は第1帰還ルートの起点)において検出された相対高度と相対高度記録部216に格納されている相対高度とが所定の閾値以上乖離する場合、ユーザに警告等を通知し、正しいフロアに戻るようナビゲートしてもよい。また、第1帰還ルートの終点以外において高度変化が検出された場合、ユーザに警告等を通知し、もとのフロアに戻るようナビゲートしてもよい。
【0048】
自律航法演算部213は、自律航法ルート制御再生部212からの指示に応答して、センサ部220から歩行距離又は歩数及び進行方向をセンサ情報として取得し、単位時間毎のベクトルデータを算出する。この単位時間は1秒などに設定されてもよいが、設定される単位時間が短いほど、より精度の高い歩行ルート情報を取得可能である反面、帰還ルートを算出するための計算量が大きくなることが予想される。歩行距離の算出について、実際上は、センサ部220の加速度センサがユーザの歩数を測定するが、自律航法演算部213が、この測定された歩数に所定のユーザの歩幅を掛け合わせることによって歩行距離を求めるようにしてもよい。
【0049】
自律航法ルート記録部214は、自律航法ルート制御再生部212から受信した第1及び第2帰還ルート情報を格納すると共に、自律航法ルート制御再生部212からの要求に応答して、格納している第1及び第2帰還ルート情報を提供する。
【0050】
相対高度検出部215は、自律航法ルート制御再生部212からの指示に応答して、センサ部220から高度(気圧)変化を示す相対高度をセンサ情報として取得し、取得した相対高度が3mなどのフロア間の移動と判断されうる所定の閾値以上である場合、自律航法ルート制御再生部212に高度変化の検知と検出された相対高度とを提供する。
【0051】
相対高度記録部216は、自律航法ルート制御再生部212から受信した相対高度を格納すると共に、自律航法ルート制御再生部212からの要求に応答して、格納している相対高度を提供する。
【0052】
センサ部220は、自律航法演算部213及び相対高度検出部215からの要求に応答して、歩行距離又は歩数及び進行方向と相対高度とを測定し、測定された歩行距離又は歩数及び進行方向を自律航法演算部113に提供すると共に、測定された相対高度を相対高度検出部215に提供する。
【0053】
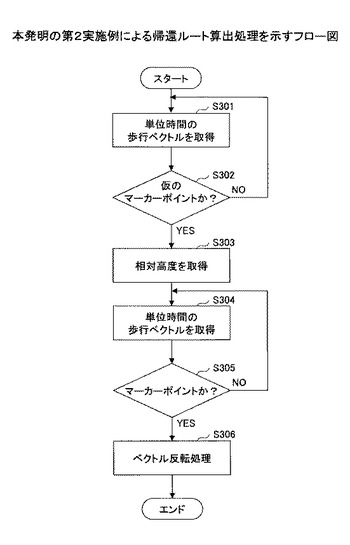
次に図7を参照して、本発明の第2実施例による帰還ルート算出処理を説明する。図7は、本発明の第2実施例による帰還ルート算出処理を示すフロー図である。説明の簡単化のため、当該フローは、エレベータ等による昇降が1回である場合の帰還ルート算出処理を示すが、複数回の昇降がある場合にも容易に拡張可能であろう。
【0054】
この帰還ルート算出処理は、駐車地点からマーカーポイントまでの往路における処理であり、典型的には、駐車場に車を駐車したユーザが、駐車地点において帰還ルートナビゲーションシステムを起動すると共に、移動端末200に帰還ルート算出指示を入力することにより開始される。
【0055】
ステップS301において、自律航法ルート制御再生部212は、自律航法演算部213にユーザの歩行ルートを測定するよう指示する。この指示に応答して、自律航法演算部213は、センサ部220に所定の単位時間におけるユーザの歩行距離及び進行方向を測定させ、測定された歩行距離及び進行方向から単位時間におけるユーザの歩行ルートを示すベクトルデータを生成する。さらに、自律航法ルート制御再生部212は、相対高度検出部215に高度変化を検知するよう指示する。この指示に応答して、相対高度検出部215は、センサ部220に高度変化を検知させる。
【0056】
ステップS302において、自律航法ルート制御再生部212は、相対高度検出部215が所定の閾値以上の高度変化を検知したか判断する。所定の閾値以上の高度変化を検知しなかった場合(S302:NO)、当該フローはステップS301に戻り、次の単位時間におけるベクトルデータを取得する。他方、所定の閾値以上の高度変化を検知した場合(S302:YES)、自律航法ルート制御再生部212は、高度変化を検知した地点を仮のマーカーポイントとして設定し、駐車地点から仮のマーカーポイントまでの歩行ルートを示すベクトルデータ系列に基づき第1歩行ルート情報を生成する。その後、当該フローはステップS303に移行する。
【0057】
ステップS303において、自律航法ルート制御再生部212は、相対高度検出部215から高度変化を示す相対高度を取得し、取得した相対高度を相対高度記録部216に格納する。
【0058】
ステップS304において、自律航法ルート制御再生部212は、自律航法演算部213にユーザの歩行ルートを再測定するよう指示する。この指示に応答して、自律航法演算部213は、センサ部220に所定の単位時間におけるユーザの歩行距離及び進行方向を測定させ、測定された歩行距離及び進行方向から単位時間におけるユーザの歩行ルートを示すベクトルデータを生成する。
【0059】
ステップS305において、自律航法ルート制御再生部212は、インタフェース2111を介しユーザからマーカーポイントに到着したことを示す通知を受信したか判断する。まだユーザがマーカーポイントに到着しておらず、ユーザからマーカーポイントに到着したことを示す通知を受信していない場合(S305:NO)、当該フローはステップS304に戻り、次の単位時間におけるベクトルデータを取得する。他方、ユーザがマーカーポイントに到着し、ユーザからマーカーポイントに到着したことを示す通知を受信した場合(S305:YES)、当該フローはステップS306に移行する。
【0060】
ステップS306において、自律航法ルート制御再生部212は、自律航法演算部213により生成された仮のマーカーポイントからユーザにより指定されたマーカーポイントまでの歩行ルートを示すベクトルデータ系列からなる第2歩行ルート情報を受信する。自律航法ルート制御再生部212は、ステップS302で取得した第1歩行ルート情報と第2歩行ルート情報のそれぞれのベクトルデータ系列に対してベクトル反転処理を実行することによって、対応する第1帰還ルート情報と第2帰還ルート情報とを生成する。自律航法ルート制御再生部212は、生成した第1帰還ルート情報と第2帰還ルート情報とを自律航法ルート記録部214に格納し、当該帰還ルート算出処理を終了する。
【0061】
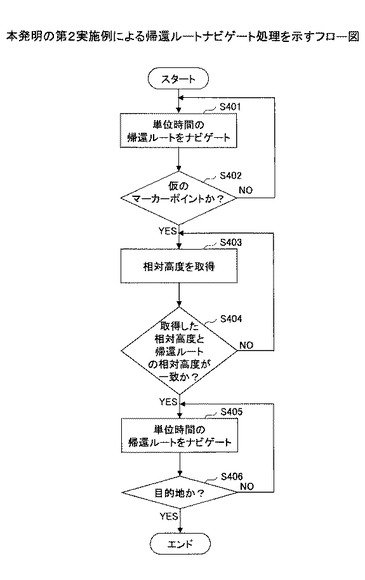
次に図8を参照して、本発明の第2実施例による帰還ルートナビゲート処理を説明する。図8は、本発明の第2実施例による帰還ルートナビゲート処理を示すフロー図である。
【0062】
この帰還ルートナビゲート処理は、マーカーポイントから駐車地点までの帰路における処理であり、典型的には、用事を済ませたユーザが、マーカーポイントにおいて帰還ルートナビゲーションシステムを起動すると共に、移動端末200に帰還ルートナビゲート指示を入力することにより開始される。
【0063】
ステップS401において、自律航法ルート制御再生部212は、自律航法ルート記録部214にアクセスして、格納されている第2帰還ルート情報を取得する。自律航法ルート制御再生部212は、取得した第2帰還ルート情報のベクトルデータに基づきインタフェース部211を介しユーザにマーカーポイントから仮のマーカーポイントまでの第2帰還ルートをナビゲートする。ユーザへのナビゲートは、例えば、移動端末200の表示装置に帰還ルートを表示してもよいし、あるいは又はこれに加えて、音声出力装置などを用いて音声によりナビゲートしてもよい。また、自律航法ルート制御再生部212は、自律航法演算部213にユーザの実際の歩行ルートを測定させ、ユーザが第2帰還ルートに沿って歩行しているか随時確認する。測定された歩行ルートと第2帰還ルートとが所定の距離及び進行角度以上乖離している場合、インタフェース部211を介しユーザにルート修正するようナビゲートしてもよい。さらに、自律航法ルート制御再生部212は、相対高度検出部215に高度変化を検出させる。ユーザが仮のマーカーポイント以外の地点で昇降を行ったことを検出すると、自律航法ルート制御再生部212は、インタフェース部211を介しユーザにルート修正するようナビゲートしてもよい。
【0064】
ステップS402において、自律航法ルート制御再生部212は、ユーザが第2帰還ルートの終点である仮のマーカーポイントに到着したか判断する。ユーザが仮のマーカーポイントに到着していない場合(S402:NO)、当該フローはステップS401に戻り、第2帰還ルート情報に基づく帰還ルートナビゲート処理を継続する。他方、ユーザが仮のマーカーポイントに到着した場合(S402:YES)、当該フローはステップS403に移行する。
【0065】
ステップS403において、自律航法ルート制御再生部212は、相対高度検出部215に仮のマーカーポイントにおけるユーザの昇降に伴う高度変化を検出させ、検出した高度変化を示す相対高度を取得する。
【0066】
ステップS404において、自律航法ルート制御再生部212は、相対高度記録部216にアクセスして、格納されている往路の相対高度を取得する。自律航法ルート制御再生部212は、取得した往路の相対高度とステップS403において取得した帰路の相対高度とが一致するか判断する。往路の相対高度と帰路の相対高度とが一致しない場合(S404:NO)、自律航法ルート制御再生部212は、ユーザが間違ったフロアに移動したと判断し、インタフェース部211を介しユーザに正しいフロアに移動するよう警告等を表示する。その後、当該フローはステップS403に戻り、ユーザが正しいフロアに移動するまで上述した処理を繰り返す。
【0067】
他方、往路の相対高度と帰路の相対高度とが一致する場合(S404:YES)、自律航法ルート制御再生部212は、ユーザが正しいフロアに移動したと判断し、仮のマーカーポイントから駐車地点までの第1帰還ルート情報をナビゲートするため、当該フローはステップS405に移行する。なお、ステップS404では、往路の相対高度と帰路の相対高度とが一致するか判定されたが、往路の相対高度と帰路の相対高度との差分が同一フロアへの移動と判断できる所定の閾値以下であるか判定するようにしてもよい。
【0068】
ステップS405において、自律航法ルート制御再生部212は、第1帰還ルートのベクトルデータに基づきインタフェース部211を介しユーザに仮のマーカーポイントから駐車地点までの第1帰還ルートをナビゲートする。
【0069】
ステップS406において、自律航法ルート制御再生部212は、ユーザが第1帰還ルートの終点である駐車地点に到着したか判断する。ユーザが駐車地点に到着していない場合(S406:NO)、当該フローはステップS405に戻り、第1帰還ルート情報に基づく帰還ルートナビゲート処理を継続する。他方、ユーザが駐車地点に到着した場合(S406:YES)、当該帰還ルートナビゲート処理は終了される。
【0070】
上述した本発明の第2実施例によると、GPS受信機、RFIC、無線基地局などのインフラ設備を駐車場に設けることなく、移動端末に搭載されている各種センサを用いた自律航法機能を利用して、ユーザに対して異なるフロア間における3次元の帰還ルートをナビゲートすることが可能となる。一般に、このような気圧センサを利用した自律航法は、環境の影響を受けやすい。しかしながら、本発明によると、往路と帰路で同一ルートを記録・逆再生するのみであるため、例えば、気圧センサにより検出される相対高度が絶対高度に対して誤差があったとしても、往路に5mの誤差があれば帰路にも5mの誤差が生じるため、このような環境の影響を受けることなく精度の高いナビゲートが可能になるという効果を有する。
【0071】
以上、本発明の特定の実施例について詳述したが、本発明は上述した実施例に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。
【符号の説明】
【0072】
100,200 移動端末
111,211 インタフェース部
112,212 自律航法ルート制御再生部
113,213 自律航法演算部
114,214 自律航法ルート記録部
215 相対高度検出部
216 相対高度記録部
【技術分野】
【0001】
本発明は、自律航法機能を利用した移動端末のためのナビゲーション技術に関する。
【背景技術】
【0002】
近年、郊外などにおいて大型商業施設の普及が拡大している。このような大型商業施設では、利用者のために大規模な駐車場が確保されている反面、買い物等の目的を終えて利用者が帰宅しようとする際に、自分の停めた車を見つけにくいといったデメリットも併せ持っている。
【0003】
従来、このような大規模な駐車場内において自分の車の駐車位置を通知してくれるシステムとして、車両に搭載したGPS受信機を利用したシステム、RFIC(Radio Frequency Integrated Circuit)を利用したシステム、複数の無線基地局を利用したシステムなどが知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−345200
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、これらのシステムは一般に利用者が簡易に利用できるものでないという問題点がある。すなわち、GPS受信機を利用したシステムでは、屋内や地下の駐車場では利用できないなど、利用環境が制限される。また、RFICを利用したシステムでは、RFICタグやRFICリーダを各駐車場やユーザの移動端末等に搭載する必要があり、このためのコストなどインフラ構築のための負荷が大きい。さらに、複数の無線基地局を利用したシステムでは、ナビゲーションを実現可能な精度により達成するため、所定の空間にメッシュの無線エリアを形成する必要があり、このような複数の無線基地局を配置するインフラ構築の負荷が大きい。
【0006】
他方、移動端末の高度化により、加速度センサなどの小型慣性センサの移動端末への搭載が一般的になっており、移動端末で取得したセンサデータを処理して移動軌跡を求める自律航法技術の開発が進められている。
【0007】
従って、本発明の課題は、上述した従来システムの問題点を鑑み、自律航法機能を用いてユーザをナビゲートするための移動端末及び方法を提供することである。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明の一態様は、ユーザの歩行情報を検出するセンサ部と、前記検出されたユーザの歩行情報に基づき前記ユーザにより指定された出発地点から目的地点までの歩行ルートを示す歩行ルート情報を生成し、前記歩行ルート情報に基づき前記目的地点から前記出発地点までの帰還ルートを示す帰還ルート情報を生成する情報処理部とを有する移動端末であって、前記情報処理部は、前記検出されたユーザの歩行情報に基づき単位時間毎の前記ユーザの歩行ルートを示すベクトルデータを生成し、前記単位時間毎のベクトルデータから前記出発地点から前記目的地点までのベクトルデータ系列を前記歩行ルート情報として生成し、前記ベクトルデータ系列に対してベクトル反転処理を実行することによって前記帰還ルート情報を生成する移動端末に関する。
【発明の効果】
【0009】
本発明によると、自律航法機能を用いてユーザをナビゲートするための移動端末及び方法を提供することができる。
【図面の簡単な説明】
【0010】
【図1】図1は、本発明の第1実施例を示す概略図である。
【図2】図2は、本発明の第1実施例による移動端末の構成を示すブロック図である。
【図3】図3は、本発明の第1実施例による帰還ルート算出処理を示すフロー図である。
【図4】図4は、本発明の第1実施例による帰還ルートナビゲート処理を示すフロー図である。
【図5】図5は、本発明の第2実施例を示す概略図である。
【図6】図6は、本発明の第2実施例による移動端末の構成を示すブロック図である。
【図7】図7は、本発明の第2実施例による帰還ルート算出処理を示すフロー図である。
【図8】図8は、本発明の第2実施例による帰還ルートナビゲート処理を示すフロー図である。
【発明を実施するための形態】
【0011】
以下、図面に基づいて本発明の実施の形態を説明する。
【0012】
以下の実施例では、特別なインフラ装置を設置する必要なく、移動端末の自律航法機能を利用してユーザを駐車した位置にナビゲートする駐車場案内システムに関して本発明が説明される。具体的には、ユーザが車を駐車した駐車地点から来店先店舗や店舗入口などの所望の目的地点(マーカーポイント)に移動する往路において、移動端末は、搭載された各種センサからの測定結果に基づき駐車地点からマーカーポイントまでのルート情報を取得する。このルート情報は、1秒などの各単位時間においてセンサにより測定されたユーザの歩行距離又は歩数と進行方向とに基づき取得されるベクトルデータの時系列からなる。移動端末は、このベクトルデータ系列をベクトル反転させることによって、当該マーカーポイントから駐車地点までの帰還ルート情報を算出する。その後、当該目的地点から駐車地点までの帰路において、移動端末は、算出した帰還ルート情報に基づきユーザに帰還ルートをナビゲートする。
【0013】
なお、以下の実施例では、駐車場案内システムに関して本発明が説明されるが、本発明はこれに限定されるものでない。すなわち、本発明は、自律航法機能を利用してユーザによって指定された出発地点からマーカーポイントまでのユーザの歩行ルート情報を取得し、当該マーカーポイントから出発地点までの帰還ルート情報をユーザにナビゲートする他の何れか適切な移動端末に適用可能である。
【0014】
図1〜4を参照して、本発明の第1実施例による移動端末を説明する。第1実施例では、駐車場に車を駐車したユーザが、駐車地点から所望の店舗や店舗入口などに向かって歩行するとき、センサにより測定された歩行中のユーザの単位時間毎のベクトルデータの時系列から駐車地点からマーカーポイントまでのルート情報を取得する。ユーザが所望の店舗や店舗入口などに到着して当該地点をマーカーポイントとして指定すると、移動端末は、駐車始点からマーカーポイントまでの間に取得したベクトルデータ系列をベクトル反転させ、マーカーポイントから駐車地点までの帰還ルートを算出及び格納する。ユーザが用事を済ませマーカーポイントから駐車地点まで帰るとき、移動端末は、格納されている帰還ルートをユーザに提示してユーザを駐車地点までナビゲートする。
【0015】
まず図1を参照して、本発明の第1実施例の概略を説明する。図1は、本発明の第1実施例を示す概略図である。駐車地点から店舗入口に向かう往路において、図1の左側に示されるように、駐車場に車を駐車したユーザは、駐車地点において移動端末のユーザインタフェースを操作して帰還ルートナビゲーションシステムを起動させる。帰還ルートナビゲーションシステムが起動されると、移動端末は、自律航法機能を起動して、1秒毎などの所定の単位時間毎にユーザの歩行距離と進行方向とをセンサに測定させ、測定された歩行距離と進行方向との測定データから単位時間毎のベクトルデータの時系列を生成し、駐車地点から歩行中の現在地点までの相対的な軌跡である歩行ルートを取得する。ユーザが店舗入口に到着し、ユーザインタフェースを操作して当該地点をマーカーポイントして指定すると、移動端末は、ベクトルデータ系列の生成を終了し、駐車地点からマーカーポイントまでのベクトルデータ系列から歩行ルート情報を生成する。その後、移動端末は、生成した歩行ルート情報のベクトルデータ系列の各ベクトルデータをベクトル反転させ、帰還ルート情報を算出及び記録する。その後、ユーザが用事を済ませて車に戻る帰路において、図1の右側に示されるように、マーカーポイントに到着したユーザは、マーカーポイントにおいて移動端末のユーザインタフェースを操作して帰還ルートナビゲーションシステムを起動させる。帰還ルートナビゲーションシステムが起動されると、移動端末は、ユーザインタフェースを介し帰還ルートをユーザにガイドすると共に、自律航法機能を起動してユーザの歩行状態を測定し、帰還ルートに従って駐車地点までユーザを適切にナビゲートする。
【0016】
次に図2を参照して、本発明の第1実施例による移動端末の構成を説明する。第1実施例による移動端末は、典型的には、携帯電話、スマートフォン、携帯端末などである。移動端末は、典型的には、補助記憶装置、メモリ装置、CPU、通信装置、表示装置、入力装置、センサ装置などの各種ハードウェアリソースの1以上から構成される。補助記憶装置は、ハードディスクやフラッシュメモリなどから構成され、後述される各種処理を実現するプログラムやデータを格納する。メモリ装置は、RAM(Random Access Memory)などから構成され、プログラムの起動指示があった場合に、補助記憶装置からプログラムを読み出して格納する。CPUは、情報を処理するプロセッサとして機能し、メモリ装置に格納されたプログラムに従って後述される各種機能を実現する。表示装置は、ディスプレイなどから構成され、ディスプレイ上に情報を表示する。入力装置は、典型的には、操作ボタン、キーボード、マウス等で構成され、移動端末のユーザが様々な操作命令を入力するのに用いられる。センサ装置は、自律航法機能を実現するための移動端末の動きを測定するための加速度センサ、地磁気センサ、ジャイロセンサなどの各種センサから構成される。なお、本発明による移動端末は、上述したハードウェア構成に限定されるものでなく、後述する各種機能を実現可能な回路等の他の何れか適切なハードウェア構成を有してもよい。
【0017】
図2は、本発明の第1実施例による移動端末の構成を示すブロック図である。図2に示されるように、移動端末100は、情報処理部110とセンサ部120とを有する。情報処理部110は、CPU、メモリ装置、補助記憶装置などにより実現され、センサ部120は、加速度センサ、地磁気センサ、ジャイロセンサなどの各種センサにより実現される。
【0018】
情報処理部110は、往路において帰還ルートナビゲーションシステムが起動されると、センサ部120から取得したセンサデータに基づき駐車地点からマーカーポイントまでのユーザの歩行ルート情報を生成し、生成した歩行ルート情報に基づき帰還ルートを算出する。さらに、情報処理部110は、帰路において帰還ルートナビゲーションシステムが起動されると、往路において算出した帰還ルート情報に基づきユーザを駐車地点までナビゲートする。情報処理部110は、インタフェース部111と、自律航法ルート制御再生部112と、自律航法演算部113と、自律航法ルート記録部114とを有する。
【0019】
インタフェース部111は、移動端末100の入力装置などを介しユーザから帰還ルートナビゲーションシステムの起動指示、往路における帰還ルート算出指示、帰路における帰還ルートナビゲーション指示などの各種操作指示と、マーカーポイントなどの各種入力情報とを受信し、受信した操作指示及び入力情報を自律航法ルート制御再生部112に送信する。また、インタフェース部111は、移動端末100の表示装置などを介し自律航法ルート制御再生部112により再生された帰還ルートと、自律航法演算部113により算出されたユーザの実際の歩行ルートとをユーザに表示することによって、ユーザを駐車地点にナビゲートする。
【0020】
自律航法ルート制御再生部112は、インタフェース部111から帰還ルートナビゲーションシステムの起動指示を受信すると、移動端末100の補助記憶装置に格納されている帰還ルートナビゲーションシステムに対応するプログラムを実行する。帰還ルートナビゲーションシステムの起動後、ユーザからインタフェース部111を介し帰還ルート算出指示を受信すると、自律航法ルート制御再生部112は、自律航法演算部113に現在地点からのユーザの歩行ルートを測定させ、歩行ルート情報を生成するよう指示する。その後、ユーザが店舗入口などに到着してマーカーポイントを指定すると、自律航法ルート制御再生部112は、自律航法演算部113に歩行ルートの測定を終了するよう指示し、測定された駐車地点からマーカーポイントまでの歩行ルート情報を自律航法演算部113から受信する。
【0021】
受信した歩行ルート情報は、駐車地点からマーカーポイントまでの単位時間毎のユーザの移動軌跡を示すベクトルデータの時系列から構成される。例えば、図1の左側の図において、横軸をX軸とし、縦軸をY軸とし、単位時間当たりのユーザの移動距離及び移動方向が図示される各矢印により表されているとする。図示される具体例では、ユーザは、駐車地点から第1単位時間において(−1,0)だけ移動し、第2単位時間において(−1,0)だけ移動し、第3単位時間において(0,2)だけ移動し、第4単位時間において(0,2)だけ移動してマーカーポイントに到着している。すなわち、歩行ルート情報は、(−1,0)→(−1,0)→(0,2)→(0,2)の4つのベクトルデータの時系列により表される。
【0022】
自律航法演算部113からこのような歩行ルート情報を受信すると、自律航法ルート制御再生部112は、対応する帰還ルートを算出するため、受信した歩行ルート情報に対してベクトル反転処理を実行する。具体的には、自律航法ルート制御再生部112は、受信した歩行ルート情報のベクトルデータ系列を時間について逆順すると共に、各ベクトルデータの符号を反転させる。例えば、上述した具体例では、受信した歩行ルート情報が(−1,0)→(−1,0)→(0,2)→(0,2)であるため、上記ベクトル反転処理を実行することによって、(0,−2)→(0,−2)→(1,0)→(1,0)という帰還ルート情報を算出することができる。実際、この帰還ルート情報が、図1の右側の図におけるマーカーポイントから駐車地点までのルートに相当することは容易に理解できるであろう。自律航法ルート制御再生部112は、このようにして算出した帰還ルート情報を自律航法ルート記録部114に格納する。
【0023】
より一般には、自律航法ルート制御再生部112により実行されるベクトル反転処理では、自律航法演算部113から取得した歩行ルート情報(x1,y1)→(x2,y2)→(x3,y3)→・・・→(xn,yn)のベクトルデータ系列の時間的順序が逆転されると共に、各ベクトルデータの符号を反転させることによって、帰還ルート情報(−xn,−yn)→・・・→(−x3,−y3)→(−x2,−y2)→(−x1,−y1)が算出される。
【0024】
さらに、ユーザが用事を済ませマーカーポイントから駐車地点に戻る際、マーカーポイントにおいて帰還ルートナビゲーションシステムの起動指示と帰路における帰還ルートナビゲーション指示とをユーザが移動端末100の入力装置に入力すると、自律航法ルート制御再生部112は、インタフェース部111を介しこれらの指示を受信し、帰還ルートナビゲート処理を開始する。すなわち、自律航法ルート制御再生部112は、自律航法ルート記録部114から往路において算出した帰還ルート情報を取得し、取得した帰還ルート情報に基づきインタフェース部111を介しユーザを駐車地点までナビゲートする。この帰還ルートナビゲート処理において、自律航法ルート制御再生部112は、典型的には、自律航法演算部113にユーザの実際の歩行ルートを測定させ、測定したユーザの実際の歩行ルートと帰還ルートとが所定の距離以上乖離すると、ユーザに警告等を通知し、正しい帰還ルートに戻るようナビゲートしてもよい。その後、ユーザが駐車地点に到着すると、自律航法ルート制御再生部112は、当該帰還ルートナビゲート処理を終了する。
【0025】
自律航法演算部113は、自律航法ルート制御再生部112からの指示に応答して、センサ部120から歩行距離又は歩数及び進行方向をセンサ情報として取得し、単位時間毎のベクトルデータを算出する。この単位時間は1秒などに設定されてもよいが、設定される単位時間が短いほど、より精度の高い歩行ルート情報を取得可能である反面、帰還ルートを算出するための計算量が大きくなることが予想される。ここで、歩行距離の算出について、実際上は、センサ部120の加速度センサがユーザの歩数を測定するが、自律航法演算部113が、この測定された歩数に所定のユーザの歩幅を掛け合わせることによって歩行距離を求めるようにしてもよい。
【0026】
自律航法ルート記録部114は、自律航法ルート制御再生部112により算出された帰還ルート情報を格納すると共に、自律航法ルート制御再生部112からの要求に応答して、格納している帰還ルート情報を提供する。
【0027】
センサ部120は、自律航法演算部113からの要求に応答して、歩行距離又は歩数及び進行方向を測定し、測定された歩行距離又は歩数及び進行方向を自律航法演算部113に提供する。
【0028】
次に図3を参照して、本発明の第1実施例による帰還ルート算出処理を説明する。図3は、本発明の第1実施例による帰還ルート算出処理を示すフロー図である。
【0029】
この帰還ルート算出処理は、駐車地点からマーカーポイントまでの往路における処理であり、典型的には、駐車場に車を駐車したユーザが、駐車地点において帰還ルートナビゲーションシステムを起動すると共に、移動端末100に帰還ルート算出指示を入力することにより開始される。
【0030】
ステップS101において、自律航法ルート制御再生部112は、自律航法演算部113にユーザの歩行ルートを測定するよう指示する。この指示に応答して、自律航法演算部113は、センサ部120に所定の単位時間におけるユーザの歩行距離及び進行方向を測定させ、測定された歩行距離及び進行方向から単位時間におけるユーザの歩行ルートを示すベクトルデータを生成する。
【0031】
ステップS102において、自律航法ルート制御再生部112は、インタフェース部111を介しユーザからマーカーポイントに到着したことを示す通知を受信したか判断する。ユーザがまだマーカーポイントに到着しておらず、ユーザからマーカーポイントに到着したことを示す通知を受信していない場合(S102:NO)、当該フローはステップS101に戻り、次の単位時間におけるベクトルデータを取得する。他方、ユーザがマーカーポイントに到着し、ユーザからマーカーポイントに到着したことを示す通知を受信した場合(S102:YES)、当該フローはステップS103に移行する。
【0032】
ステップS103において、自律航法ルート制御再生部112は、自律航法演算部113により生成された駐車地点からマーカーポイントまでのベクトルデータ系列からなる歩行ルート情報を受信し、受信した歩行ルート情報のベクトルデータ系列に対してベクトル反転処理を実行することによって、対応する帰還ルート情報を生成する。すなわち、自律航法ルート制御再生部112は、受信した歩行ルート情報(x1,y1)→(x2,y2)→(x3,y3)→・・・→(xn,yn)のベクトルデータ系列の時間的順序を逆転すると共に、各ベクトルデータの符号を反転させることによって、帰還ルート情報(−xn,−yn)→・・・→(−x3,−y3)→(−x2,−y2)→(−x1,−y1)を生成する。自律航法ルート制御再生部112は、生成した帰還ルート情報を自律航法ルート記録部114に格納し、当該帰還ルート算出処理を終了する。
【0033】
次に図4を参照して、本発明の第1実施例による帰還ルートナビゲート処理を説明する。図4は、本発明の第1実施例による帰還ルートナビゲート処理を示すフロー図である。
【0034】
この帰還ルートナビゲート処理は、マーカーポイントから駐車地点までの帰路における処理であり、典型的には、用事を済ませたユーザが、マーカーポイントにおいて帰還ルートナビゲーションシステムを起動すると共に、移動端末100に帰還ルートナビゲート指示を入力することにより開始される。
【0035】
ステップS201において、自律航法ルート制御再生部112は、自律航法ルート記録部114にアクセスして、格納されている帰還ルート情報を取得する。自律航法ルート制御再生部112は、取得した帰還ルート情報のベクトルデータ系列に基づきインタフェース部111を介しユーザに帰還ルートをナビゲートする。ユーザへのナビゲートは、例えば、移動端末100の表示装置に帰還ルートを表示してもよいし、あるいは又はこれに加えて、音声出力装置などを用いて音声によりナビゲートしてもよい。また、自律航法ルート制御再生部112は、自律航法演算部113にユーザの実際の歩行ルートを測定させ、ユーザが帰還ルートに沿って歩行しているか随時確認する。測定された歩行ルートと帰還ルートとが所定の距離及び/又は所定の角度以上乖離している場合、インタフェース部111を介しユーザにルート修正するようナビゲートしてもよい。
【0036】
ステップS202において、自律航法ルート制御再生部112は、ユーザが帰還ルートの終点である駐車地点に到着したか判断する。ユーザが駐車地点に到着していない場合(S202:NO)、当該フローはステップS201に戻り、帰還ルートナビゲート処理を継続する。他方、ユーザが駐車地点に到着した場合(S202:YES)、当該帰還ルートナビゲート処理は終了される。
【0037】
上述した本発明の第1実施例によると、GPS受信機、RFIC、無線基地局などのインフラ設備を駐車場に設けることなく、移動端末に搭載されている各種センサを用いた自律航法機能を利用して、ユーザに対して帰還ルートをナビゲートすることが可能となる。一般に、このようなセンサを利用した自律航法は、歩幅の相違など個人差の影響を受けやすい。しかしながら、本発明によると、往路と帰路で同一ルートを記録・逆再生するのみであるため、例えば、歩幅が平均より大きいユーザであっても、往路に10mの誤差があれば帰路にも10mの誤差が生じるため、このような個人差の影響を受けることなく精度の高いナビゲートが可能になるという効果を有する。
【0038】
次に、図5〜8を参照して、本発明の第2実施例による移動端末を説明する。第1実施例では、駐車地点とマーカーポイントとが同一フロア上にある場合の帰還ルートナビゲート処理を説明した。第2実施例では、駐車地点とマーカーポイントとが異なるフロア上にある場合の帰還ルートナビゲート処理を説明する。すなわち、本発明の第2実施例は、駐車地点とマーカーポイントとの間に高度差があるケースに適用可能である。この相対高度を検出するため、第2実施例による移動端末は、センサ装置として気圧センサをさらに有する。
【0039】
まず図5を参照して、本発明の第2実施例の概略を説明する。図5は、本発明の第2実施例を示す概略図である。駐車地点から店舗入口に向かう往路において、図5の左側に示されるように、駐車場に車を駐車したユーザは、駐車地点において移動端末のユーザインタフェースを操作して帰還ルートナビゲーションシステムを起動させる。帰還ルートナビゲーションシステムが起動されると、移動端末は、自律航法機能を起動して、1秒毎などの所定の単位時間毎にユーザの歩行距離と進行方向とをセンサに測定させ、測定された歩行距離と進行方向との測定データから単位時間毎のベクトルデータの時系列を生成し、駐車地点から歩行中の現在地点までの相対的な軌跡である歩行ルートを取得する。ユーザが店舗入口に到着してエレベータ等で昇降すると、移動端末の気圧センサが昇降に伴う高度変化を検知する。この高度変化が検知されると、移動端末は、フロア変更が行われたと判断し、検知された地点を仮のマーカーポイントとして設定し、駐車地点から仮のマーカーポイントまでの第1歩行ルート情報を取得すると共に、昇降前後の相対高度を記録する。昇降後にユーザが歩行を再開すると、移動端末は、仮のマーカーポイントから歩行ルートのベクトルデータの生成を再開し、仮のマーカーポイントから歩行中の現在地点までの相対的な軌跡である歩行ルートを取得する。ユーザが目的地に到着し、ユーザインタフェースを操作して当該地点をマーカーポイントして指定すると、移動端末は、ベクトルデータの生成を終了し、仮のマーカーポイントからマーカーポイントまでの第2歩行ルート情報を生成する。その後、移動端末は、第1及び第2ルート情報のベクトルデータ系列の各ベクトルデータをそれぞれベクトル反転させ、対応する第1及び第2帰還ルート情報を算出及び記録する。その後、ユーザが用事を済ませて車に戻る帰路において、図5の右側に示されるように、マーカーポイントに到着したユーザは、マーカーポイントにおいて移動端末のユーザインタフェースを操作して帰還ルートナビゲーションシステムを起動させる。帰還ルートナビゲーションシステムが起動されると、移動端末は、格納されている第1及び第2帰還ルートと相対高度とに基づきユーザインタフェースを介しユーザをガイドすると共に、自律航法機能を起動してユーザの歩行状態を測定し、帰還ルートに従って駐車地点までユーザを適切にナビゲートする。なお、以下の実施例では、エレベータ等の昇降が1回しかないケースについて、すなわち、仮のマーカーポイントが1つであるケースについて説明するが、複数回昇降が行われるケースについても同様に適用可能であることは容易に明らかであろう。
【0040】
図6は、本発明の第2実施例による移動端末の構成を示すブロック図である。図6に示されるように、移動端末200は、情報処理部210とセンサ部220とを有する。情報処理部210は、CPU、メモリ装置、補助記憶装置などにより実現され、センサ部220は、加速度センサ、地磁気センサ、ジャイロセンサに加えて、高度変化を検知する気圧センサなどの各種センサにより実現される。
【0041】
情報処理部210は、往路において帰還ルートナビゲーションシステムが起動されると、センサ部220から取得した相対高度を含むセンサデータに基づき、駐車地点から高度変化が検知された仮のマーカーポイントまでの第1歩行ルート情報と、昇降後の仮のマーカーポイントからユーザにより指定されたマーカーポイントまでの第2歩行ルート情報とを生成し、生成した第1及び第2歩行ルート情報と相対高度とに基づき帰還ルートを算出する。さらに、情報処理部210は、帰路において帰還ルートナビゲーションシステムが起動されると、往路において算出した帰還ルート情報に基づきユーザを駐車地点までナビゲートする。情報処理部210は、インタフェース部211と、自律航法ルート制御再生部212と、自律航法演算部213と、自律航法ルート記録部214と、相対高度検出部215と、相対高度記録部216とを有する。
【0042】
インタフェース部211は、移動端末200の入力装置などを介しユーザから帰還ルートナビゲーションシステムの起動指示、往路における帰還ルート算出指示、帰路における帰還ルートナビゲーション指示などの各種操作指示と、マーカーポイントなどの各種入力情報とを受信し、受信した操作指示及び入力情報を自律航法ルート制御再生部212に送信する。また、インタフェース部211は、移動端末200の表示装置などを介し自律航法ルート制御再生部212により再生された帰還ルートと、自律航法演算部213により算出されたユーザの実際の歩行ルートとをユーザに表示することによって、ユーザを駐車地点にナビゲートする。
【0043】
自律航法ルート制御再生部212は、インタフェース部211から帰還ルートナビゲーションシステムの起動指示を受信すると、移動端末200の補助記憶装置に格納されている帰還ルートナビゲーションシステムに対応するプログラムを実行する。帰還ルートナビゲーションシステムの起動後、ユーザからインタフェース部211を介し帰還ルート算出指示を受信すると、自律航法ルート制御再生部212は、自律航法演算部213に現在地点からのユーザの歩行ルートを測定させ、歩行ルート情報を生成するよう指示する。さらに、自律航法ルート制御再生部212は、相対高度検出部215にユーザのエレベータ等の昇降に伴う高度変化を検出させる。3mなどのフロア間の移動と判断されうる所定の閾値以上の高度変化が検出されると、自律航法ルート制御再生部212は、高度変化が検出された地点を仮のマーカーポイントとして設定し、駐車地点から仮のマーカーポイントまでの歩行ルートを示すベクトルデータ系列からなる第1歩行ルート情報を生成すると共に、相対高度検出部215により検出されたユーザの昇降前後の相対高度を相対高度記録部216に格納する。昇降後にユーザが歩行を再開したことを検出すると、自律航法ルート制御再生部212は、自律航法演算部213に仮のマーカーポイントから歩行ルートを再び測定させ、ユーザが店舗入口などに到着してマーカーポイントを指定すると、自律航法ルート制御再生部212は、自律航法演算部213に歩行ルートの測定を終了するよう指示し、仮のマーカーポイントから当該マーカーポイントまでの第2歩行ルート情報を自律航法演算部213から受信する。
【0044】
受信した第1歩行ルート情報は、駐車地点から仮のマーカーポイントまでの単位時間毎のユーザの移動軌跡を示すベクトルデータの時系列から構成される。また、受信した第2歩行ルート情報は、仮のマーカーポイントからマーカーポイントまでの単位時間毎のユーザの移動軌跡を示すベクトルデータの時系列から構成される。
【0045】
自律航法演算部213から第1及び第2歩行ルート情報を受信すると、自律航法ルート制御再生部212は、対応する帰還ルートを算出するため、受信した第1及び第2歩行ルート情報のそれぞれに対してベクトル反転処理を実行する。具体的には、自律航法ルート制御再生部212は、受信した第1及び第2歩行ルート情報のそれぞれに対して、ベクトルデータ系列を時間について逆順にすると共に、各ベクトルデータの符号を反転させる。例えば、自律航法演算部213から取得した第1歩行ルート情報と第2歩行ルート情報がそれぞれ、(x11,y11)→(x12,y12)→(x13,y13)→・・・→(x1n,y1n)と(x21,y21)→(x22,y22)→(x23,y23)→・・・→(x2n,y2n)である場合、自律航法ルート制御再生部212は、第1歩行ルート情報と第2歩行ルート情報のベクトルデータ系列のそれぞれに対してベクトル反転処理を実行し、第1帰還ルート情報(−x1n,−y1n)→・・・→(−x13,−y13)→(−x12,−y12)→(−x11,−y11)と、第2帰還ルート情報(−x2n,−y2n)→・・・→(−x23,−y23)→(−x22,−y22)→(−x21,−y21)とを算出し、自律航法ルート記録部214に記録する。
【0046】
さらに、ユーザが用事を済ませマーカーポイントから駐車地点に戻る際、マーカーポイントにおいて帰還ルートナビゲーションシステムの起動指示と帰路における帰還ルートナビゲーション指示とをユーザが移動端末200の入力装置に入力すると、自律航法ルート制御再生部212は、インタフェース部211を介しこれらの指示を受信し、帰還ルートナビゲート処理を開始する。すなわち、自律航法ルート制御再生部212は、自律航法ルート記録部214から往路において算出した第1及び第2帰還ルート情報を取得し、さらに相対高度記録部216から昇降により検出された相対高度を取得し、取得した第1及び第2帰還ルート情報と相対高度とに基づきインタフェース部211を介しユーザを駐車地点までナビゲートする。ここで、自律航法ルート制御再生部212は、まずマーカーポイントから仮のマーカーポイントまでの第2帰還ルート情報に従ってユーザをナビゲートし、フロア間の昇降後に、仮のマーカーポイントから駐車地点までの第2帰還ルート情報に従ってユーザをナビゲートする。
【0047】
この帰還ルートナビゲート処理において、自律航法ルート制御再生部212は、典型的には、自律航法演算部213にユーザの実際の歩行ルートを測定させ、測定した実際の歩行ルートと帰還ルートとが所定の距離以上乖離すると、ユーザに警告等を通知し、正しい帰還ルートに戻るようナビゲートしてもよい。また、自律航法ルート制御再生部212は、相対高度検出部215に高度変化を検出させ、第2帰還ルートの終点(又は第1帰還ルートの起点)において検出された相対高度と相対高度記録部216に格納されている相対高度とが所定の閾値以上乖離する場合、ユーザに警告等を通知し、正しいフロアに戻るようナビゲートしてもよい。また、第1帰還ルートの終点以外において高度変化が検出された場合、ユーザに警告等を通知し、もとのフロアに戻るようナビゲートしてもよい。
【0048】
自律航法演算部213は、自律航法ルート制御再生部212からの指示に応答して、センサ部220から歩行距離又は歩数及び進行方向をセンサ情報として取得し、単位時間毎のベクトルデータを算出する。この単位時間は1秒などに設定されてもよいが、設定される単位時間が短いほど、より精度の高い歩行ルート情報を取得可能である反面、帰還ルートを算出するための計算量が大きくなることが予想される。歩行距離の算出について、実際上は、センサ部220の加速度センサがユーザの歩数を測定するが、自律航法演算部213が、この測定された歩数に所定のユーザの歩幅を掛け合わせることによって歩行距離を求めるようにしてもよい。
【0049】
自律航法ルート記録部214は、自律航法ルート制御再生部212から受信した第1及び第2帰還ルート情報を格納すると共に、自律航法ルート制御再生部212からの要求に応答して、格納している第1及び第2帰還ルート情報を提供する。
【0050】
相対高度検出部215は、自律航法ルート制御再生部212からの指示に応答して、センサ部220から高度(気圧)変化を示す相対高度をセンサ情報として取得し、取得した相対高度が3mなどのフロア間の移動と判断されうる所定の閾値以上である場合、自律航法ルート制御再生部212に高度変化の検知と検出された相対高度とを提供する。
【0051】
相対高度記録部216は、自律航法ルート制御再生部212から受信した相対高度を格納すると共に、自律航法ルート制御再生部212からの要求に応答して、格納している相対高度を提供する。
【0052】
センサ部220は、自律航法演算部213及び相対高度検出部215からの要求に応答して、歩行距離又は歩数及び進行方向と相対高度とを測定し、測定された歩行距離又は歩数及び進行方向を自律航法演算部113に提供すると共に、測定された相対高度を相対高度検出部215に提供する。
【0053】
次に図7を参照して、本発明の第2実施例による帰還ルート算出処理を説明する。図7は、本発明の第2実施例による帰還ルート算出処理を示すフロー図である。説明の簡単化のため、当該フローは、エレベータ等による昇降が1回である場合の帰還ルート算出処理を示すが、複数回の昇降がある場合にも容易に拡張可能であろう。
【0054】
この帰還ルート算出処理は、駐車地点からマーカーポイントまでの往路における処理であり、典型的には、駐車場に車を駐車したユーザが、駐車地点において帰還ルートナビゲーションシステムを起動すると共に、移動端末200に帰還ルート算出指示を入力することにより開始される。
【0055】
ステップS301において、自律航法ルート制御再生部212は、自律航法演算部213にユーザの歩行ルートを測定するよう指示する。この指示に応答して、自律航法演算部213は、センサ部220に所定の単位時間におけるユーザの歩行距離及び進行方向を測定させ、測定された歩行距離及び進行方向から単位時間におけるユーザの歩行ルートを示すベクトルデータを生成する。さらに、自律航法ルート制御再生部212は、相対高度検出部215に高度変化を検知するよう指示する。この指示に応答して、相対高度検出部215は、センサ部220に高度変化を検知させる。
【0056】
ステップS302において、自律航法ルート制御再生部212は、相対高度検出部215が所定の閾値以上の高度変化を検知したか判断する。所定の閾値以上の高度変化を検知しなかった場合(S302:NO)、当該フローはステップS301に戻り、次の単位時間におけるベクトルデータを取得する。他方、所定の閾値以上の高度変化を検知した場合(S302:YES)、自律航法ルート制御再生部212は、高度変化を検知した地点を仮のマーカーポイントとして設定し、駐車地点から仮のマーカーポイントまでの歩行ルートを示すベクトルデータ系列に基づき第1歩行ルート情報を生成する。その後、当該フローはステップS303に移行する。
【0057】
ステップS303において、自律航法ルート制御再生部212は、相対高度検出部215から高度変化を示す相対高度を取得し、取得した相対高度を相対高度記録部216に格納する。
【0058】
ステップS304において、自律航法ルート制御再生部212は、自律航法演算部213にユーザの歩行ルートを再測定するよう指示する。この指示に応答して、自律航法演算部213は、センサ部220に所定の単位時間におけるユーザの歩行距離及び進行方向を測定させ、測定された歩行距離及び進行方向から単位時間におけるユーザの歩行ルートを示すベクトルデータを生成する。
【0059】
ステップS305において、自律航法ルート制御再生部212は、インタフェース2111を介しユーザからマーカーポイントに到着したことを示す通知を受信したか判断する。まだユーザがマーカーポイントに到着しておらず、ユーザからマーカーポイントに到着したことを示す通知を受信していない場合(S305:NO)、当該フローはステップS304に戻り、次の単位時間におけるベクトルデータを取得する。他方、ユーザがマーカーポイントに到着し、ユーザからマーカーポイントに到着したことを示す通知を受信した場合(S305:YES)、当該フローはステップS306に移行する。
【0060】
ステップS306において、自律航法ルート制御再生部212は、自律航法演算部213により生成された仮のマーカーポイントからユーザにより指定されたマーカーポイントまでの歩行ルートを示すベクトルデータ系列からなる第2歩行ルート情報を受信する。自律航法ルート制御再生部212は、ステップS302で取得した第1歩行ルート情報と第2歩行ルート情報のそれぞれのベクトルデータ系列に対してベクトル反転処理を実行することによって、対応する第1帰還ルート情報と第2帰還ルート情報とを生成する。自律航法ルート制御再生部212は、生成した第1帰還ルート情報と第2帰還ルート情報とを自律航法ルート記録部214に格納し、当該帰還ルート算出処理を終了する。
【0061】
次に図8を参照して、本発明の第2実施例による帰還ルートナビゲート処理を説明する。図8は、本発明の第2実施例による帰還ルートナビゲート処理を示すフロー図である。
【0062】
この帰還ルートナビゲート処理は、マーカーポイントから駐車地点までの帰路における処理であり、典型的には、用事を済ませたユーザが、マーカーポイントにおいて帰還ルートナビゲーションシステムを起動すると共に、移動端末200に帰還ルートナビゲート指示を入力することにより開始される。
【0063】
ステップS401において、自律航法ルート制御再生部212は、自律航法ルート記録部214にアクセスして、格納されている第2帰還ルート情報を取得する。自律航法ルート制御再生部212は、取得した第2帰還ルート情報のベクトルデータに基づきインタフェース部211を介しユーザにマーカーポイントから仮のマーカーポイントまでの第2帰還ルートをナビゲートする。ユーザへのナビゲートは、例えば、移動端末200の表示装置に帰還ルートを表示してもよいし、あるいは又はこれに加えて、音声出力装置などを用いて音声によりナビゲートしてもよい。また、自律航法ルート制御再生部212は、自律航法演算部213にユーザの実際の歩行ルートを測定させ、ユーザが第2帰還ルートに沿って歩行しているか随時確認する。測定された歩行ルートと第2帰還ルートとが所定の距離及び進行角度以上乖離している場合、インタフェース部211を介しユーザにルート修正するようナビゲートしてもよい。さらに、自律航法ルート制御再生部212は、相対高度検出部215に高度変化を検出させる。ユーザが仮のマーカーポイント以外の地点で昇降を行ったことを検出すると、自律航法ルート制御再生部212は、インタフェース部211を介しユーザにルート修正するようナビゲートしてもよい。
【0064】
ステップS402において、自律航法ルート制御再生部212は、ユーザが第2帰還ルートの終点である仮のマーカーポイントに到着したか判断する。ユーザが仮のマーカーポイントに到着していない場合(S402:NO)、当該フローはステップS401に戻り、第2帰還ルート情報に基づく帰還ルートナビゲート処理を継続する。他方、ユーザが仮のマーカーポイントに到着した場合(S402:YES)、当該フローはステップS403に移行する。
【0065】
ステップS403において、自律航法ルート制御再生部212は、相対高度検出部215に仮のマーカーポイントにおけるユーザの昇降に伴う高度変化を検出させ、検出した高度変化を示す相対高度を取得する。
【0066】
ステップS404において、自律航法ルート制御再生部212は、相対高度記録部216にアクセスして、格納されている往路の相対高度を取得する。自律航法ルート制御再生部212は、取得した往路の相対高度とステップS403において取得した帰路の相対高度とが一致するか判断する。往路の相対高度と帰路の相対高度とが一致しない場合(S404:NO)、自律航法ルート制御再生部212は、ユーザが間違ったフロアに移動したと判断し、インタフェース部211を介しユーザに正しいフロアに移動するよう警告等を表示する。その後、当該フローはステップS403に戻り、ユーザが正しいフロアに移動するまで上述した処理を繰り返す。
【0067】
他方、往路の相対高度と帰路の相対高度とが一致する場合(S404:YES)、自律航法ルート制御再生部212は、ユーザが正しいフロアに移動したと判断し、仮のマーカーポイントから駐車地点までの第1帰還ルート情報をナビゲートするため、当該フローはステップS405に移行する。なお、ステップS404では、往路の相対高度と帰路の相対高度とが一致するか判定されたが、往路の相対高度と帰路の相対高度との差分が同一フロアへの移動と判断できる所定の閾値以下であるか判定するようにしてもよい。
【0068】
ステップS405において、自律航法ルート制御再生部212は、第1帰還ルートのベクトルデータに基づきインタフェース部211を介しユーザに仮のマーカーポイントから駐車地点までの第1帰還ルートをナビゲートする。
【0069】
ステップS406において、自律航法ルート制御再生部212は、ユーザが第1帰還ルートの終点である駐車地点に到着したか判断する。ユーザが駐車地点に到着していない場合(S406:NO)、当該フローはステップS405に戻り、第1帰還ルート情報に基づく帰還ルートナビゲート処理を継続する。他方、ユーザが駐車地点に到着した場合(S406:YES)、当該帰還ルートナビゲート処理は終了される。
【0070】
上述した本発明の第2実施例によると、GPS受信機、RFIC、無線基地局などのインフラ設備を駐車場に設けることなく、移動端末に搭載されている各種センサを用いた自律航法機能を利用して、ユーザに対して異なるフロア間における3次元の帰還ルートをナビゲートすることが可能となる。一般に、このような気圧センサを利用した自律航法は、環境の影響を受けやすい。しかしながら、本発明によると、往路と帰路で同一ルートを記録・逆再生するのみであるため、例えば、気圧センサにより検出される相対高度が絶対高度に対して誤差があったとしても、往路に5mの誤差があれば帰路にも5mの誤差が生じるため、このような環境の影響を受けることなく精度の高いナビゲートが可能になるという効果を有する。
【0071】
以上、本発明の特定の実施例について詳述したが、本発明は上述した実施例に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。
【符号の説明】
【0072】
100,200 移動端末
111,211 インタフェース部
112,212 自律航法ルート制御再生部
113,213 自律航法演算部
114,214 自律航法ルート記録部
215 相対高度検出部
216 相対高度記録部
【特許請求の範囲】
【請求項1】
ユーザの歩行情報を検出するセンサ部と、
前記検出されたユーザの歩行情報に基づき前記ユーザにより指定された出発地点から目的地点までの歩行ルートを示す歩行ルート情報を生成し、前記歩行ルート情報に基づき前記目的地点から前記出発地点までの帰還ルートを示す帰還ルート情報を生成する情報処理部と、
を有する移動端末であって、
前記情報処理部は、前記検出されたユーザの歩行情報に基づき単位時間毎の前記ユーザの歩行ルートを示すベクトルデータを生成し、前記単位時間毎のベクトルデータから前記出発地点から前記目的地点までのベクトルデータ系列を前記歩行ルート情報として生成し、前記ベクトルデータ系列に対してベクトル反転処理を実行することによって前記帰還ルート情報を生成する移動端末。
【請求項2】
前記センサ部はさらに、当該移動端末の高度変化を検出し、
前記センサ部が当該移動端末の高度変化を検出すると、前記情報処理部は、前記出発地点から前記高度変化を検出した高度変化地点までの第1ベクトルデータ系列を生成し、前記高度変化地点から前記目的地点までの第2ベクトルデータ系列を生成し、前記第1ベクトルデータ系列と前記第2ベクトルデータ系列とに対してそれぞれベクトル反転処理を実行して第1帰還ルート情報と第2帰還ルート情報とを生成し、前記第1帰還ルート情報と前記第2帰還ルート情報とを組み合わせ前記帰還ルート情報を生成する、請求項1記載の移動端末。
【請求項3】
前記情報処理部は、前記帰還ルート情報に基づき前記ユーザを前記目的地点から前記出発地点までナビゲートする、請求項1又は2記載の移動端末。
【請求項4】
前記センサ部は、加速度センサ、地磁気センサ、ジャイロセンサ及び気圧センサを含む、請求項1乃至3何れか一項記載の移動端末。
【請求項5】
移動端末によって実行される帰還ルートを算出する方法であって、
前記移動端末のユーザインタフェースを介しユーザの歩行ルートの出発地点を受信するステップと、
前記ユーザの歩行情報を検出し、前記検出されたユーザの歩行情報に基づき単位時間毎の前記受信した出発地点からの前記ユーザの歩行ルートを示すベクトルデータを生成するステップと、
前記ユーザインタフェースを介し前記ユーザの歩行ルートの目的地点を受信するステップと、
前記単位時間毎のベクトルデータから前記出発地点から前記目的地点までのベクトルデータ系列を生成するステップと、
前記ベクトルデータ系列に対してベクトル反転処理を実行することによって前記帰還ルートを算出するステップと、
を有する方法。
【請求項1】
ユーザの歩行情報を検出するセンサ部と、
前記検出されたユーザの歩行情報に基づき前記ユーザにより指定された出発地点から目的地点までの歩行ルートを示す歩行ルート情報を生成し、前記歩行ルート情報に基づき前記目的地点から前記出発地点までの帰還ルートを示す帰還ルート情報を生成する情報処理部と、
を有する移動端末であって、
前記情報処理部は、前記検出されたユーザの歩行情報に基づき単位時間毎の前記ユーザの歩行ルートを示すベクトルデータを生成し、前記単位時間毎のベクトルデータから前記出発地点から前記目的地点までのベクトルデータ系列を前記歩行ルート情報として生成し、前記ベクトルデータ系列に対してベクトル反転処理を実行することによって前記帰還ルート情報を生成する移動端末。
【請求項2】
前記センサ部はさらに、当該移動端末の高度変化を検出し、
前記センサ部が当該移動端末の高度変化を検出すると、前記情報処理部は、前記出発地点から前記高度変化を検出した高度変化地点までの第1ベクトルデータ系列を生成し、前記高度変化地点から前記目的地点までの第2ベクトルデータ系列を生成し、前記第1ベクトルデータ系列と前記第2ベクトルデータ系列とに対してそれぞれベクトル反転処理を実行して第1帰還ルート情報と第2帰還ルート情報とを生成し、前記第1帰還ルート情報と前記第2帰還ルート情報とを組み合わせ前記帰還ルート情報を生成する、請求項1記載の移動端末。
【請求項3】
前記情報処理部は、前記帰還ルート情報に基づき前記ユーザを前記目的地点から前記出発地点までナビゲートする、請求項1又は2記載の移動端末。
【請求項4】
前記センサ部は、加速度センサ、地磁気センサ、ジャイロセンサ及び気圧センサを含む、請求項1乃至3何れか一項記載の移動端末。
【請求項5】
移動端末によって実行される帰還ルートを算出する方法であって、
前記移動端末のユーザインタフェースを介しユーザの歩行ルートの出発地点を受信するステップと、
前記ユーザの歩行情報を検出し、前記検出されたユーザの歩行情報に基づき単位時間毎の前記受信した出発地点からの前記ユーザの歩行ルートを示すベクトルデータを生成するステップと、
前記ユーザインタフェースを介し前記ユーザの歩行ルートの目的地点を受信するステップと、
前記単位時間毎のベクトルデータから前記出発地点から前記目的地点までのベクトルデータ系列を生成するステップと、
前記ベクトルデータ系列に対してベクトル反転処理を実行することによって前記帰還ルートを算出するステップと、
を有する方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−19725(P2013−19725A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−151966(P2011−151966)
【出願日】平成23年7月8日(2011.7.8)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月8日(2011.7.8)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【Fターム(参考)】
[ Back to top ]