
移動端末及び送信電力制御方法
【課題】 移動端末間の相対距離が変化する環境であっても、適切な送信電力で通信を行える技術を提供する。
【解決手段】 無線通信を行う移動端末に、無線通信手段と、自ノードと通信相手ノードとの所定時間後の相対距離を予測する予測手段と、予測した相対距離に基づいて無線通信手段の送信電力を制御する通信制御手段を設けた。自ノード及び通信相手ノードの現在位置及び移動速度を取得する位置情報取得手段をさらに設け、予測手段は、これらの情報に基づいて、所定時間後の自ノードと通信相手ノードとの相対距離を予測することが好ましい。
【解決手段】 無線通信を行う移動端末に、無線通信手段と、自ノードと通信相手ノードとの所定時間後の相対距離を予測する予測手段と、予測した相対距離に基づいて無線通信手段の送信電力を制御する通信制御手段を設けた。自ノード及び通信相手ノードの現在位置及び移動速度を取得する位置情報取得手段をさらに設け、予測手段は、これらの情報に基づいて、所定時間後の自ノードと通信相手ノードとの相対距離を予測することが好ましい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動端末の送信電力を制御する技術に関する。
【背景技術】
【0002】
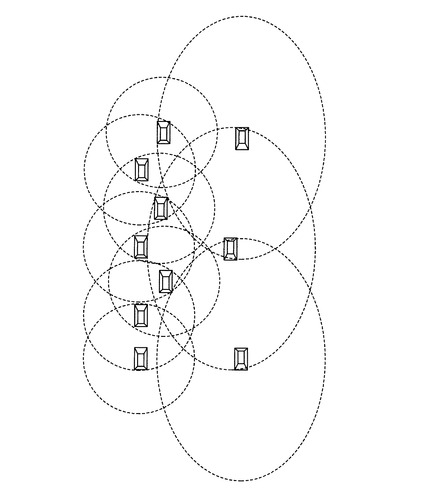
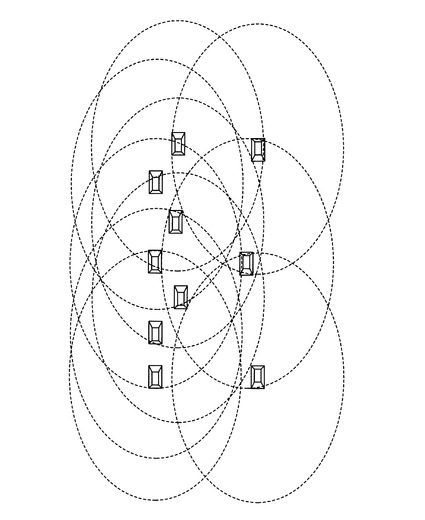
無線端末が無線通信を行う際に、全ての端末が最大送信電力で通信を行うと、図8に示すように電波の干渉が多数発生して通信品質が低下する。電波の干渉を低減し通信環境を最適化するための技術として送信電力の制御がある。
【0003】
従来の技術では、互いの受信強度を元に送信電力の最適化を行っている。すなわち、受信信号の信号強度が所定の閾値よりも低い場合には、送信電力を段階的に増加し、受信信号の信号強度が閾値を超えると送信電力の増加を停止する技術が知られている(特許文献1)。
【特許文献1】特開2004−260753号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のような従来技術は、車載端末のように、端末間の相対速度が大きい移動端末には適さない。端末間の相対速度が大きいと、この端末間の距離は短時間の間に大きく変化し、それに伴い受信強度も大きく変動する。従来技術のように受信電波の強度に基づいて送信電力を制御する方法では、受信と送信電力制御の間にタイムラグがあるため、受信強度が短時間に大きく変化する状況に追従することができないのである。
【0005】
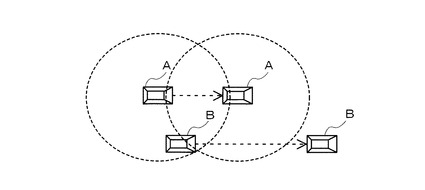
図9に示すように、端末間の距離が大きくなる場合には、ある時点で最適化された端末Aの送信電力では、次の時点において通信相手の端末Bまで電波が届かないという問題が生じる。また逆に、端末間の距離が小さくなる場合には、次の時点において必要以上の送信電力で通信を行うことになり電波の利用効率が低下する。
【0006】
これらの問題は、端末が高速で移動する場合には特に大きな問題となる。
【0007】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、移動端末間の相対距離が変化する環境であっても、適切な送信電力で通信を行える技術を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために本発明では、以下の手段または処理によって移動端末において送信電力の制御を行う。
【0009】
本発明に係る移動端末は、無線通信手段と、自ノードと通信相手ノードとの所定時間後の相対距離を予測する予測手段と、予測した相対距離に基づいて無線通信手段の送信電力を制御する通信制御手段とを有する。
【0010】
ここで、移動端末とは、ノートパソコン、PDA、携帯電話等のように、その端末装置自体が持ち運び可能なものの他、車載端末のように、その端末装置自体は自動車等に固定されて設置されてはいるが、設置された対象物(自動車等)が移動体であるものも含まれる。
【0011】
また、通信相手ノードとは、送信ノードが直接通信するノードのことである。送信ノー
ドが受信ノードと直接通信する場合には、受信ノードが通信相手ノードとなる。また、送信ノードと受信ノードとが中継ノードを介して通信するアドホック無線通信方式においては、最初の中継を行う中継ノードが通信相手ノードとなる。
【0012】
自ノードと通信相手ノードとの所定時間後の相対距離は、位置情報取得手段が自ノードの位置及び移動速度並びに通信相手ノードの位置及び移動速度を取得し、予測手段が、取得したこれらの情報に基づいて予測することが好適である。なお、移動速度には、移動の速さと移動の方向とが含まれる。例えば、自ノードの位置はGPSによって取得し、移動の速さは速度センサによって取得し、移動の方向はジャイロなどによって取得する。また、移動の速さ及び方向は、GPSを用いて推定しても良い。
【0013】
また、通信相手ノードの位置及び移動速度は、ミリ波レーダー、レーザーレーダーなどのレーダー、超音波センサ、画像センサなどの自律センサによって取得することが好ましい。この方法以外にも、基地局が上記のようにレーダーなどによって位置及び移動速度を取得し、移動端末が通信によって基地局からこれらの情報を取得しても良い。また、通信相手ノード自身が位置及び移動速度を取得し、移動端末が通信によって通信相手ノードからこれらの情報を取得しても良い。
【0014】
予測手段は、自ノード及び通信相手ノードの現在位置及び移動速度が取得できれば、これらの情報に基づいて、所定時間後の自ノード及び通信相手ノードの相対距離を予測することができる。なお、所定時間は、次に自ノードが送信を行うまでの時間であることが好ましい。そして、通信制御手段は、予測した相対距離を変数とする関数を用いて送信電力を算出することが好ましい。また、相対距離をレベルに分け、相対距離のレベルに応じた送信電力を使用することも好ましい。
【0015】
上記のように適切な送信電力を直接算出する方法以外にも、自ノードと通信相手ノードの相対距離を利用して送信電力を段階的に制御しても良い。すなわち、通信制御手段は、自ノードと通信相手ノードとの相対距離が大きくなる場合には送信電力を所定のレベルだけ大きくし、相対距離が小さくなる場合には送信電力を所定のレベルだけ小さくする。またこの場合、相対距離の変化のみに着目するのではなく、現在の相対距離も考慮に入れて送信電力を制御することも好ましい。すなわち、相対距離が小さくなる場合であっても、現在の相対距離によっては送信電力を小さくせずに維持するなどの制御を行っても良い。
【0016】
このように、自ノードと送信相手ノードの所定時間後の相対距離を予測し、この予測した相対距離に基づいて送信電波の出力強度を決定するため、自ノードと送信相手ノードとの相対速度が大きい場合であっても適切な送信電力で通信を行うことが可能となる。すなわち、受信電波の電波強度などの過去の情報に基づいてではなく、電波送信時のノード間の相対距離に基づいて送信電力を決定するため、移動端末が高速で移動する環境であっても適切な送信電力で通信を行うことができる。
【0017】
自ノードと送信相手ノードとの相対距離が大きくなる場合には、送信電力を大きくすることで両ノード間における通信が確保されることになる。また逆に、自ノードと送信相手ノードとの相対距離が小さくなる場合には、送信電力を小さくすることで、必要以上に大きい送信電力を用いないですみ、電波の干渉を抑えることが可能となる。つまり、本発明によれば、高速で移動する移動端末間においても、通信が途切れることなく、かつ、電波利用効率の良い送信電力で無線通信を行うことが可能となる。
【0018】
本発明に係る移動端末は、自ノードの周辺に存在するノード数、自ノード周辺におけるノイズレベル、および通信相手ノードから受信した電波の電波強度のうち少なくとも1つを含む電波状況を取得する電波状況取得手段を有し、通信制御手段は、取得した電波状況
も考慮して送信電力を制御することが好適である。
【0019】
自端末の周辺に存在するノードの数は、周辺のノードから位置情報を受信することによって取得しても良い。また移動端末が車載端末である場合には、VICS(Vehicle Information and Communication System)などの交通情報配信システムから渋滞情報を取得し、これに基づいて周辺のノード(車載端末)数を推定しても良い。また、道路ごとあるいは時間帯・曜日ごとなどに定められた渋滞情報(例:朝夕は混雑するが、昼間は空いている。週末は混雑するが、平日は空いている)を、車載端末内に地図情報と関連付けて記憶しておき、これに基づいて周辺のノード数を推定しても良い。周辺に他のノードが多く存在する場合には、通信制御手段は、電波の干渉を避けるため送信電力を下げるように制御することが好ましい。
【0020】
自ノード周辺におけるノイズレベルが大きい場合には、通信制御手段は、送信電力を上げるよう制御することが好ましい。例えば、相対距離に基づいて算出した送信電力がノイズレベルよりも小さい場合には、ノイズレベルより大きい送信電力を用いる。このように、適切な送信電力を算出する際に、通信相手ノードとの相対距離だけではなくノイズレベルも考慮することで、適切な送信電力を決定することができる。
【0021】
また、通信相手ノードから受信した電波の受信電波強度が大きい場合には、通信制御手段は、送信電力を下げるように制御することが好ましい。
【0022】
このように、通信相手ノードとの相対距離に加えて、周辺のノード数、ノイズレベル、受信電波強度などの電波状況も考慮して送信電力を決定することにより、適切な送信電力での通信を行うことが可能となる。したがって、電波の干渉を少なくすることが可能となり、電波の利用効率の高い通信を行うことができる。
【0023】
なお、本発明は、上記手段の少なくとも一部を有する移動端末として捉えることができる。また、本発明は、上記処理の少なくとも一部を含む送信電力制御方法、または、かかる方法を実現するためのプログラムとして捉えることができる。上記手段及び処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【0024】
たとえば、本発明の一態様としての送信電力制御方法は、無線通信を行う移動端末が、自ノードと通信相手ノードとの所定時間後の相対距離を予測し、予測した相対距離に基づいて送信電力を制御する。
【0025】
また、本発明の一態様としてのプログラムは、無線通信を行う移動端末に、このノードと通信相手ノードとの所定時間後の相対距離を予測させ、予測した相対距離に基づいて送信電力を制御させる。
【0026】
また、本発明の一態様としての車両は、上記の移動端末を備える車両である。
【発明の効果】
【0027】
本発明によれば、移動端末間の相対距離が変化する環境であっても、適切な送信電力で通信を行うことが可能となる。
【発明を実施するための最良の形態】
【0028】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0029】
(第1の実施形態)
本発明の第1の実施形態では、車載端末(移動端末)がアドホック無線通信方式を用い
て車車間通信を行う。アドホック無線通信では、1又は複数の中継ノードを介して目的とするノードと通信を行う。本実施形態においては、中継ノードは送信元ノードに隣接するノードとする。ただし、所定の距離だけ離れたノードを中継ノードとして利用することも可能である。
【0030】
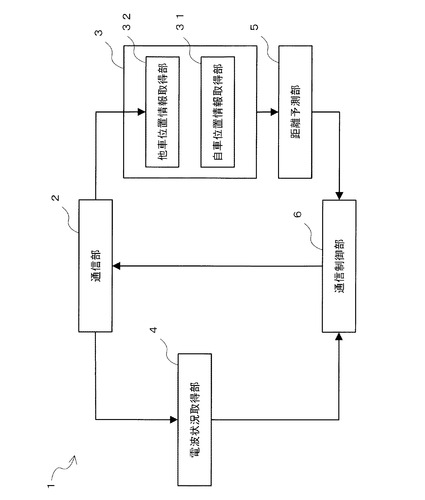
図1は、本実施形態における車載端末1の構成を示すブロック図である。車載端末1は、通信部2、位置情報取得部3、電波状況取得部4、距離予測部5、通信制御部6から構成される。
【0031】
通信部2は、電波の送受信を行う。位置情報取得部3は、自車位置情報取得部31と他車位置情報取得部32から構成される。自車位置情報取得部31は、GPS、ジャイロ、車速センサを有する。自車位置情報取得部31は、GPSから自車の位置を取得し、ジャイロから自車の移動方向を取得し、車速センサから自車の移動の速さを取得する。移動方向はジャイロ以外にも電子方位計などを用いて取得するよう構成されて良い。車速センサには、車速が計測できるものであれば、磁気式、機械式などいかなる技術を用いても構わない。
【0032】
他車位置情報取得部32は、通信相手ノード(中継ノード)の位置及び走行速度を取得する。本実施形態においては、路側機から配信される情報を通信部2で受信することによって取得する。すなわち、各車載端末は、自車位置情報取得部31が取得した位置及び走行速度を路側機に送信し、路側機は位置及び走行速度の情報を周囲の車載端末に対して配信する。
【0033】
他車位置情報取得部32は、ミリ波レーダーやレーザーレーダーなどのレーダー、超音波センサ、画像センサなどの自律センサを有するように構成し、センサによって通信相手ノードの位置および走行速度を取得するようにしても良い。また、通信相手ノードの位置及び走行速度が取得できる構成であれば、どのような構成であっても構わない。
【0034】
電波状況取得部4は、通信部2によって受信される電波からノイズレベルを検出する。
【0035】
距離予測部5は、位置情報取得部3が取得した自車及び他車の現在位置及び走行速度から、所定時間後における自車及び他車の位置を予測し、その相対距離を予測する。ここで、所定時間は、次にデータを送信する時刻までの時間であってもよいし、それよりも長い時間であっても良い。
【0036】
通信制御部6は、電波状況取得部4が検出したノイズレベル及び距離予測部5が予測した相対距離に基づいて適切な送信電力を算出する。そして、算出した送信電力を用いて、通信部2から電波を送信する。
【0037】
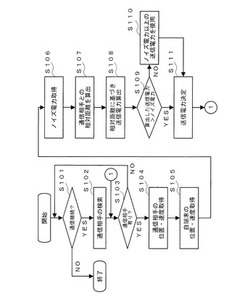
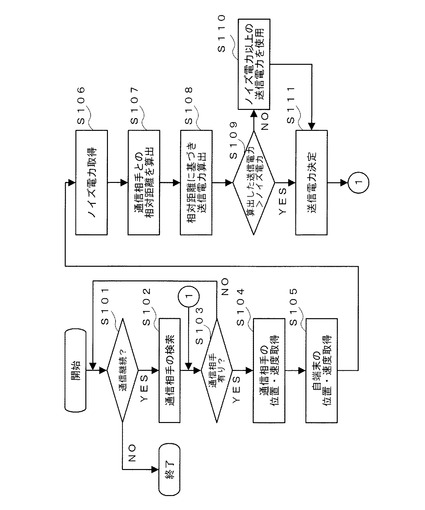
図2は、車載端末1が行う送信電力制御処理の流れを示すフローチャートである。まずステップS101で、通信を行うか判断する。通信を行わない場合には、処理を終了する。通信を行う場合には、ステップS102に進み、通信相手を検索(スキャン)する。そして、ステップS103で通信相手が存在するか否か判断する。通信相手が存在しない場合には、ステップS101に戻り再び通信相手の検索を行う。通信相手が存在する場合には、ステップS104に進み、適切な送信電力を算出する処理を行う。
【0038】
ステップS104では、他車位置情報取得部32が通信相手の位置及び走行速度を取得する。ステップS105で、自車位置情報取得部31が自車の位置及び走行速度を取得する。ステップS106で、電波状況取得部4が、周辺のノイズレベルを取得する。
【0039】
ステップS107において、距離予測部5は、所定時間後(例えば20ミリ秒後)の自車及び通信相手端末の位置を、現在位置及び走行速度から予測し、それぞれの予測位置から自車と通信相手端末との相対距離を予測する。
【0040】
ステップS108で、通信制御部6は、予測した相対距離から送信電力を求める。電波の到達距離は、送信電力の1/3乗〜1/4乗に比例するので、適切な送信電力Pは、P=aLn として求められる。ここで、Lはノード間の距離、nは伝搬損失の係数、aは定数である。なお、伝搬損失の係数nは3〜4の値をとる。伝搬損失の係数nは、例えば、あらかじめ定められた所定の値を用いても良い。また、走行中の道路ごとに定められた値を地図情報とともに車載端末1が保持するように構成し、自車の位置情報に基づいて走行中の道路における伝搬損失の係数を用いても良い。また、この道路ごとの伝搬損失の係数は、車載端末1に格納せず、路側機から配信されるよう構成しても良い。
【0041】
ステップS109で、上記で算出した送信電力が周囲のノイズレベル以上であるか判断する。算出した送信電力がノイズレベルと同じか小さい場合には、ステップS110に進み送信電力としてノイズレベルを上回る電力を使用するようにする。そして、ステップS111に進み、算出した送信電力、あるいはノイズレベル以上として設定された送信電力を用いて、電波の送信を行う。
【0042】
なお、ステップS108〜S111の送信電力制御処理は、データを送信するたびに行う必要はなく、所定の時間間隔で処理が実行されるようにしても良い。
【0043】
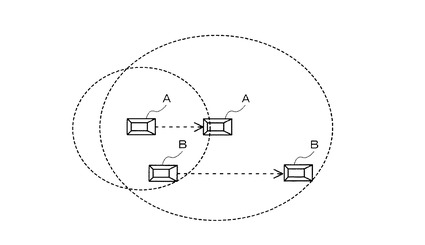
このように電波を送信する時点での自ノードと通信相手ノードとの相対距離を予測し、この相対距離に基づいて送信電力を算出するため、自ノードと通信相手ノードとの相対速度が大きい場合であっても、適切な送信電力で通信を行うことが可能である。図3に示すように、車両Aと車両Bの速度差が大きく相対距離が大きくなっていく場合であっても、車両Aは相対距離が大きくなることを予測して送信電力を大きくする。したがって、車両Aと車両Bとの間の通信が途切れることがなくなる。また逆に、車両Aと車両Bの相対距離が小さくなる場合には、車両Aは送信電力を小さくして通信を行うことで、電波の干渉を抑えられる。
【0044】
このようにしてそれぞれの車両が適切な送信電力を用いて通信を行うため、それぞれが最大電力で通信を行う場合(図8)に比べて、図4に示すように電波の干渉の影響を少なく抑えることが可能となる。したがって、電波利用効率の高い通信を実現することが可能となる。
【0045】
(第2の実施形態)
本発明の第2の実施形態では、予測した相対距離に基づいて送信電力を段階的に変化させる制御を行う。
【0046】
本実施形態における車載端末の構成は第1実施形態と同様であり図1に示すとおりである。なお、本実施形態における電波状況取得部4は、自端末の周辺に存在する車載端末の数を路側機から取得し、また、周辺のノイズレベルも取得する。
【0047】
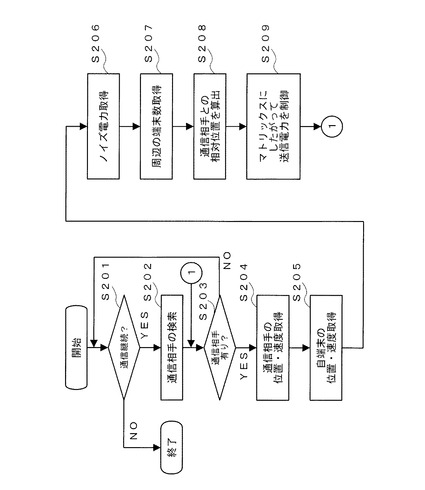
本実施形態における送信電力制御処理を、図5のフローチャートを用いて説明する。ステップS201〜S203では、第1の実施形態の場合と同様に、通信を行うか否か、及び、通信相手が存在するか否かを確認する。
【0048】
ステップS204で他車位置情報取得部32が通信相手ノードの位置及び走行速度を取得する。ステップS205では自車位置情報取得部31が、自車の位置及び走行速度を取
得する。
【0049】
ステップS206で、電波状況取得部4が周辺のノイズレベルを取得する。また、ステップS207で、電波状況取得部4が周辺のノード数を取得する。
【0050】
ステップS208で、距離予測部5は、自ノードと通信相手ノードとの現在の相対位置及び所定時間後の相対位置を算出する。そして、ステップS209で、通信制御部6は、相対位置、相対位置の変位、周辺の端末数、ノイズを考慮して、マトリックス(テーブル)に基づいて送信電力を段階的に調整する。
【0051】
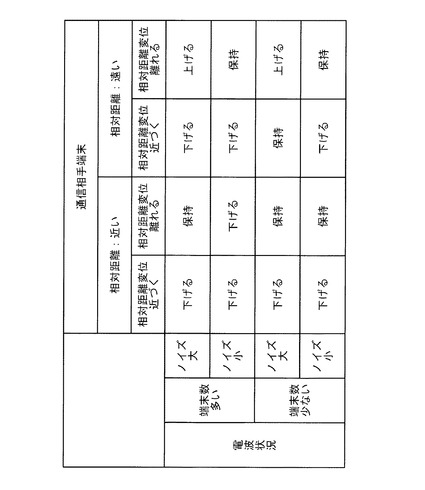
図6は、本実施形態で使用するマトリックスの例である。図6のマトリックスでは、通信相手ノードとの現在の相対距離及び相対距離の変位、及び、周辺の端末数、ノイズを入力とするマトリックスを用いている。相対距離は、所定の閾値を基準にして、近いか遠いかの2通りに分ける。相対距離の変位は、近づくか離れるかの2通りに分ける。周辺のノード数は、所定の閾値を基準に多いか少ないかの2通りに分け、ノイズも同様に所定の閾値を基準に大きいか小さいかの2通りに分ける。このような、マトリックスにしたがって送信電力を制御することで、適切な送信電力での通信が可能となる。
【0052】
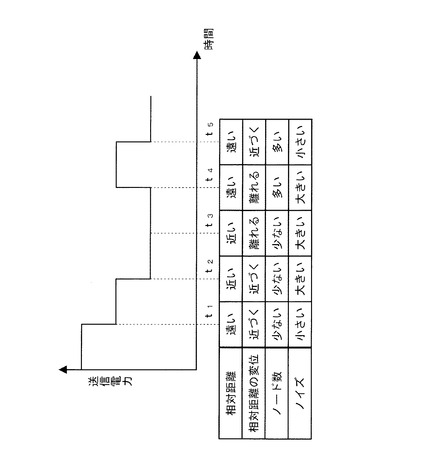
図7を用いて、マトリックスにしたがって送信電力を制御する例を説明する。図7上側のグラフは、縦軸を送信電力、横軸を時間とする、送信電力の制御を示すグラフである。図7下側は、各時点t1〜t5における通信相手ノードとの相対距離、相対距離の変位、周囲のノード数、ノイズレベルを示す表である。
【0053】
時刻t1において、通信相手ノードとの相対距離は遠く、相対距離の変位は近づいており、周囲のノード数が少なく、ノイズも小さい状態である。この状態における送信電力制御を図6のマトリックスから読み取ると、送信電力を下げることが分かる。したがって、通信制御部6は、時刻t1において送信電力を下げる制御を行う。以下、t2〜t5の各時刻においても同様に、通信制御部6は、周囲の状況に応じて図6のマトリックスに指定されるように送信電力を制御する。
【0054】
なお、図6においては、例えば相対距離は、近い・遠いの2通りに分類したが、距離に応じてより細かく分類しても良い。相対距離の変位、周辺のノード数、ノイズレベルも同様に細かく分類することができる。また、送信電力の制御も、常に一定の幅だけ調整せずに、条件に応じて調整する量を変えても良い。
【0055】
また、相対距離、相対距離の変位、周辺のノード数、ノイズ以外にも、通信相手から受信した電波の受信強度も考慮したマトリックスを作成し、これに基づいて送信電力を制御することもできる。
【0056】
本実施形態では、マトリックスを用いることで、簡単な処理で送信電力を決定することが可能となる。
【図面の簡単な説明】
【0057】
【図1】第1の実施形態における車載端末の機能ブロックを表す図である。
【図2】第1の実施形態における送信電力制御処理を示すフローチャートである。
【図3】第1の実施形態における送信電力制御処理を説明する図である。
【図4】第1の実施形態における送信電力制御処理を説明する図である。
【図5】第2の実施形態における送信電力制御処理を示すフローチャートである。
【図6】第2の実施形態における送信電力制御方法を説明する図である。
【図7】第2の実施形態における送信電力制御の例を示す図である。
【図8】従来の送信電力制御を用いた場合の電波状況を示す図である。
【図9】従来の送信電力制御を用いた場合の電波状況を示す図である。
【符号の説明】
【0058】
1 車載端末
2 通信部
3 位置情報取得部
4 電波状況取得部
5 距離予測部
6 通信制御部
31 自車位置情報取得部
32 他車位置情報取得部
A,B 車両
【技術分野】
【0001】
本発明は、移動端末の送信電力を制御する技術に関する。
【背景技術】
【0002】
無線端末が無線通信を行う際に、全ての端末が最大送信電力で通信を行うと、図8に示すように電波の干渉が多数発生して通信品質が低下する。電波の干渉を低減し通信環境を最適化するための技術として送信電力の制御がある。
【0003】
従来の技術では、互いの受信強度を元に送信電力の最適化を行っている。すなわち、受信信号の信号強度が所定の閾値よりも低い場合には、送信電力を段階的に増加し、受信信号の信号強度が閾値を超えると送信電力の増加を停止する技術が知られている(特許文献1)。
【特許文献1】特開2004−260753号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のような従来技術は、車載端末のように、端末間の相対速度が大きい移動端末には適さない。端末間の相対速度が大きいと、この端末間の距離は短時間の間に大きく変化し、それに伴い受信強度も大きく変動する。従来技術のように受信電波の強度に基づいて送信電力を制御する方法では、受信と送信電力制御の間にタイムラグがあるため、受信強度が短時間に大きく変化する状況に追従することができないのである。
【0005】
図9に示すように、端末間の距離が大きくなる場合には、ある時点で最適化された端末Aの送信電力では、次の時点において通信相手の端末Bまで電波が届かないという問題が生じる。また逆に、端末間の距離が小さくなる場合には、次の時点において必要以上の送信電力で通信を行うことになり電波の利用効率が低下する。
【0006】
これらの問題は、端末が高速で移動する場合には特に大きな問題となる。
【0007】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、移動端末間の相対距離が変化する環境であっても、適切な送信電力で通信を行える技術を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために本発明では、以下の手段または処理によって移動端末において送信電力の制御を行う。
【0009】
本発明に係る移動端末は、無線通信手段と、自ノードと通信相手ノードとの所定時間後の相対距離を予測する予測手段と、予測した相対距離に基づいて無線通信手段の送信電力を制御する通信制御手段とを有する。
【0010】
ここで、移動端末とは、ノートパソコン、PDA、携帯電話等のように、その端末装置自体が持ち運び可能なものの他、車載端末のように、その端末装置自体は自動車等に固定されて設置されてはいるが、設置された対象物(自動車等)が移動体であるものも含まれる。
【0011】
また、通信相手ノードとは、送信ノードが直接通信するノードのことである。送信ノー
ドが受信ノードと直接通信する場合には、受信ノードが通信相手ノードとなる。また、送信ノードと受信ノードとが中継ノードを介して通信するアドホック無線通信方式においては、最初の中継を行う中継ノードが通信相手ノードとなる。
【0012】
自ノードと通信相手ノードとの所定時間後の相対距離は、位置情報取得手段が自ノードの位置及び移動速度並びに通信相手ノードの位置及び移動速度を取得し、予測手段が、取得したこれらの情報に基づいて予測することが好適である。なお、移動速度には、移動の速さと移動の方向とが含まれる。例えば、自ノードの位置はGPSによって取得し、移動の速さは速度センサによって取得し、移動の方向はジャイロなどによって取得する。また、移動の速さ及び方向は、GPSを用いて推定しても良い。
【0013】
また、通信相手ノードの位置及び移動速度は、ミリ波レーダー、レーザーレーダーなどのレーダー、超音波センサ、画像センサなどの自律センサによって取得することが好ましい。この方法以外にも、基地局が上記のようにレーダーなどによって位置及び移動速度を取得し、移動端末が通信によって基地局からこれらの情報を取得しても良い。また、通信相手ノード自身が位置及び移動速度を取得し、移動端末が通信によって通信相手ノードからこれらの情報を取得しても良い。
【0014】
予測手段は、自ノード及び通信相手ノードの現在位置及び移動速度が取得できれば、これらの情報に基づいて、所定時間後の自ノード及び通信相手ノードの相対距離を予測することができる。なお、所定時間は、次に自ノードが送信を行うまでの時間であることが好ましい。そして、通信制御手段は、予測した相対距離を変数とする関数を用いて送信電力を算出することが好ましい。また、相対距離をレベルに分け、相対距離のレベルに応じた送信電力を使用することも好ましい。
【0015】
上記のように適切な送信電力を直接算出する方法以外にも、自ノードと通信相手ノードの相対距離を利用して送信電力を段階的に制御しても良い。すなわち、通信制御手段は、自ノードと通信相手ノードとの相対距離が大きくなる場合には送信電力を所定のレベルだけ大きくし、相対距離が小さくなる場合には送信電力を所定のレベルだけ小さくする。またこの場合、相対距離の変化のみに着目するのではなく、現在の相対距離も考慮に入れて送信電力を制御することも好ましい。すなわち、相対距離が小さくなる場合であっても、現在の相対距離によっては送信電力を小さくせずに維持するなどの制御を行っても良い。
【0016】
このように、自ノードと送信相手ノードの所定時間後の相対距離を予測し、この予測した相対距離に基づいて送信電波の出力強度を決定するため、自ノードと送信相手ノードとの相対速度が大きい場合であっても適切な送信電力で通信を行うことが可能となる。すなわち、受信電波の電波強度などの過去の情報に基づいてではなく、電波送信時のノード間の相対距離に基づいて送信電力を決定するため、移動端末が高速で移動する環境であっても適切な送信電力で通信を行うことができる。
【0017】
自ノードと送信相手ノードとの相対距離が大きくなる場合には、送信電力を大きくすることで両ノード間における通信が確保されることになる。また逆に、自ノードと送信相手ノードとの相対距離が小さくなる場合には、送信電力を小さくすることで、必要以上に大きい送信電力を用いないですみ、電波の干渉を抑えることが可能となる。つまり、本発明によれば、高速で移動する移動端末間においても、通信が途切れることなく、かつ、電波利用効率の良い送信電力で無線通信を行うことが可能となる。
【0018】
本発明に係る移動端末は、自ノードの周辺に存在するノード数、自ノード周辺におけるノイズレベル、および通信相手ノードから受信した電波の電波強度のうち少なくとも1つを含む電波状況を取得する電波状況取得手段を有し、通信制御手段は、取得した電波状況
も考慮して送信電力を制御することが好適である。
【0019】
自端末の周辺に存在するノードの数は、周辺のノードから位置情報を受信することによって取得しても良い。また移動端末が車載端末である場合には、VICS(Vehicle Information and Communication System)などの交通情報配信システムから渋滞情報を取得し、これに基づいて周辺のノード(車載端末)数を推定しても良い。また、道路ごとあるいは時間帯・曜日ごとなどに定められた渋滞情報(例:朝夕は混雑するが、昼間は空いている。週末は混雑するが、平日は空いている)を、車載端末内に地図情報と関連付けて記憶しておき、これに基づいて周辺のノード数を推定しても良い。周辺に他のノードが多く存在する場合には、通信制御手段は、電波の干渉を避けるため送信電力を下げるように制御することが好ましい。
【0020】
自ノード周辺におけるノイズレベルが大きい場合には、通信制御手段は、送信電力を上げるよう制御することが好ましい。例えば、相対距離に基づいて算出した送信電力がノイズレベルよりも小さい場合には、ノイズレベルより大きい送信電力を用いる。このように、適切な送信電力を算出する際に、通信相手ノードとの相対距離だけではなくノイズレベルも考慮することで、適切な送信電力を決定することができる。
【0021】
また、通信相手ノードから受信した電波の受信電波強度が大きい場合には、通信制御手段は、送信電力を下げるように制御することが好ましい。
【0022】
このように、通信相手ノードとの相対距離に加えて、周辺のノード数、ノイズレベル、受信電波強度などの電波状況も考慮して送信電力を決定することにより、適切な送信電力での通信を行うことが可能となる。したがって、電波の干渉を少なくすることが可能となり、電波の利用効率の高い通信を行うことができる。
【0023】
なお、本発明は、上記手段の少なくとも一部を有する移動端末として捉えることができる。また、本発明は、上記処理の少なくとも一部を含む送信電力制御方法、または、かかる方法を実現するためのプログラムとして捉えることができる。上記手段及び処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【0024】
たとえば、本発明の一態様としての送信電力制御方法は、無線通信を行う移動端末が、自ノードと通信相手ノードとの所定時間後の相対距離を予測し、予測した相対距離に基づいて送信電力を制御する。
【0025】
また、本発明の一態様としてのプログラムは、無線通信を行う移動端末に、このノードと通信相手ノードとの所定時間後の相対距離を予測させ、予測した相対距離に基づいて送信電力を制御させる。
【0026】
また、本発明の一態様としての車両は、上記の移動端末を備える車両である。
【発明の効果】
【0027】
本発明によれば、移動端末間の相対距離が変化する環境であっても、適切な送信電力で通信を行うことが可能となる。
【発明を実施するための最良の形態】
【0028】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0029】
(第1の実施形態)
本発明の第1の実施形態では、車載端末(移動端末)がアドホック無線通信方式を用い
て車車間通信を行う。アドホック無線通信では、1又は複数の中継ノードを介して目的とするノードと通信を行う。本実施形態においては、中継ノードは送信元ノードに隣接するノードとする。ただし、所定の距離だけ離れたノードを中継ノードとして利用することも可能である。
【0030】
図1は、本実施形態における車載端末1の構成を示すブロック図である。車載端末1は、通信部2、位置情報取得部3、電波状況取得部4、距離予測部5、通信制御部6から構成される。
【0031】
通信部2は、電波の送受信を行う。位置情報取得部3は、自車位置情報取得部31と他車位置情報取得部32から構成される。自車位置情報取得部31は、GPS、ジャイロ、車速センサを有する。自車位置情報取得部31は、GPSから自車の位置を取得し、ジャイロから自車の移動方向を取得し、車速センサから自車の移動の速さを取得する。移動方向はジャイロ以外にも電子方位計などを用いて取得するよう構成されて良い。車速センサには、車速が計測できるものであれば、磁気式、機械式などいかなる技術を用いても構わない。
【0032】
他車位置情報取得部32は、通信相手ノード(中継ノード)の位置及び走行速度を取得する。本実施形態においては、路側機から配信される情報を通信部2で受信することによって取得する。すなわち、各車載端末は、自車位置情報取得部31が取得した位置及び走行速度を路側機に送信し、路側機は位置及び走行速度の情報を周囲の車載端末に対して配信する。
【0033】
他車位置情報取得部32は、ミリ波レーダーやレーザーレーダーなどのレーダー、超音波センサ、画像センサなどの自律センサを有するように構成し、センサによって通信相手ノードの位置および走行速度を取得するようにしても良い。また、通信相手ノードの位置及び走行速度が取得できる構成であれば、どのような構成であっても構わない。
【0034】
電波状況取得部4は、通信部2によって受信される電波からノイズレベルを検出する。
【0035】
距離予測部5は、位置情報取得部3が取得した自車及び他車の現在位置及び走行速度から、所定時間後における自車及び他車の位置を予測し、その相対距離を予測する。ここで、所定時間は、次にデータを送信する時刻までの時間であってもよいし、それよりも長い時間であっても良い。
【0036】
通信制御部6は、電波状況取得部4が検出したノイズレベル及び距離予測部5が予測した相対距離に基づいて適切な送信電力を算出する。そして、算出した送信電力を用いて、通信部2から電波を送信する。
【0037】
図2は、車載端末1が行う送信電力制御処理の流れを示すフローチャートである。まずステップS101で、通信を行うか判断する。通信を行わない場合には、処理を終了する。通信を行う場合には、ステップS102に進み、通信相手を検索(スキャン)する。そして、ステップS103で通信相手が存在するか否か判断する。通信相手が存在しない場合には、ステップS101に戻り再び通信相手の検索を行う。通信相手が存在する場合には、ステップS104に進み、適切な送信電力を算出する処理を行う。
【0038】
ステップS104では、他車位置情報取得部32が通信相手の位置及び走行速度を取得する。ステップS105で、自車位置情報取得部31が自車の位置及び走行速度を取得する。ステップS106で、電波状況取得部4が、周辺のノイズレベルを取得する。
【0039】
ステップS107において、距離予測部5は、所定時間後(例えば20ミリ秒後)の自車及び通信相手端末の位置を、現在位置及び走行速度から予測し、それぞれの予測位置から自車と通信相手端末との相対距離を予測する。
【0040】
ステップS108で、通信制御部6は、予測した相対距離から送信電力を求める。電波の到達距離は、送信電力の1/3乗〜1/4乗に比例するので、適切な送信電力Pは、P=aLn として求められる。ここで、Lはノード間の距離、nは伝搬損失の係数、aは定数である。なお、伝搬損失の係数nは3〜4の値をとる。伝搬損失の係数nは、例えば、あらかじめ定められた所定の値を用いても良い。また、走行中の道路ごとに定められた値を地図情報とともに車載端末1が保持するように構成し、自車の位置情報に基づいて走行中の道路における伝搬損失の係数を用いても良い。また、この道路ごとの伝搬損失の係数は、車載端末1に格納せず、路側機から配信されるよう構成しても良い。
【0041】
ステップS109で、上記で算出した送信電力が周囲のノイズレベル以上であるか判断する。算出した送信電力がノイズレベルと同じか小さい場合には、ステップS110に進み送信電力としてノイズレベルを上回る電力を使用するようにする。そして、ステップS111に進み、算出した送信電力、あるいはノイズレベル以上として設定された送信電力を用いて、電波の送信を行う。
【0042】
なお、ステップS108〜S111の送信電力制御処理は、データを送信するたびに行う必要はなく、所定の時間間隔で処理が実行されるようにしても良い。
【0043】
このように電波を送信する時点での自ノードと通信相手ノードとの相対距離を予測し、この相対距離に基づいて送信電力を算出するため、自ノードと通信相手ノードとの相対速度が大きい場合であっても、適切な送信電力で通信を行うことが可能である。図3に示すように、車両Aと車両Bの速度差が大きく相対距離が大きくなっていく場合であっても、車両Aは相対距離が大きくなることを予測して送信電力を大きくする。したがって、車両Aと車両Bとの間の通信が途切れることがなくなる。また逆に、車両Aと車両Bの相対距離が小さくなる場合には、車両Aは送信電力を小さくして通信を行うことで、電波の干渉を抑えられる。
【0044】
このようにしてそれぞれの車両が適切な送信電力を用いて通信を行うため、それぞれが最大電力で通信を行う場合(図8)に比べて、図4に示すように電波の干渉の影響を少なく抑えることが可能となる。したがって、電波利用効率の高い通信を実現することが可能となる。
【0045】
(第2の実施形態)
本発明の第2の実施形態では、予測した相対距離に基づいて送信電力を段階的に変化させる制御を行う。
【0046】
本実施形態における車載端末の構成は第1実施形態と同様であり図1に示すとおりである。なお、本実施形態における電波状況取得部4は、自端末の周辺に存在する車載端末の数を路側機から取得し、また、周辺のノイズレベルも取得する。
【0047】
本実施形態における送信電力制御処理を、図5のフローチャートを用いて説明する。ステップS201〜S203では、第1の実施形態の場合と同様に、通信を行うか否か、及び、通信相手が存在するか否かを確認する。
【0048】
ステップS204で他車位置情報取得部32が通信相手ノードの位置及び走行速度を取得する。ステップS205では自車位置情報取得部31が、自車の位置及び走行速度を取
得する。
【0049】
ステップS206で、電波状況取得部4が周辺のノイズレベルを取得する。また、ステップS207で、電波状況取得部4が周辺のノード数を取得する。
【0050】
ステップS208で、距離予測部5は、自ノードと通信相手ノードとの現在の相対位置及び所定時間後の相対位置を算出する。そして、ステップS209で、通信制御部6は、相対位置、相対位置の変位、周辺の端末数、ノイズを考慮して、マトリックス(テーブル)に基づいて送信電力を段階的に調整する。
【0051】
図6は、本実施形態で使用するマトリックスの例である。図6のマトリックスでは、通信相手ノードとの現在の相対距離及び相対距離の変位、及び、周辺の端末数、ノイズを入力とするマトリックスを用いている。相対距離は、所定の閾値を基準にして、近いか遠いかの2通りに分ける。相対距離の変位は、近づくか離れるかの2通りに分ける。周辺のノード数は、所定の閾値を基準に多いか少ないかの2通りに分け、ノイズも同様に所定の閾値を基準に大きいか小さいかの2通りに分ける。このような、マトリックスにしたがって送信電力を制御することで、適切な送信電力での通信が可能となる。
【0052】
図7を用いて、マトリックスにしたがって送信電力を制御する例を説明する。図7上側のグラフは、縦軸を送信電力、横軸を時間とする、送信電力の制御を示すグラフである。図7下側は、各時点t1〜t5における通信相手ノードとの相対距離、相対距離の変位、周囲のノード数、ノイズレベルを示す表である。
【0053】
時刻t1において、通信相手ノードとの相対距離は遠く、相対距離の変位は近づいており、周囲のノード数が少なく、ノイズも小さい状態である。この状態における送信電力制御を図6のマトリックスから読み取ると、送信電力を下げることが分かる。したがって、通信制御部6は、時刻t1において送信電力を下げる制御を行う。以下、t2〜t5の各時刻においても同様に、通信制御部6は、周囲の状況に応じて図6のマトリックスに指定されるように送信電力を制御する。
【0054】
なお、図6においては、例えば相対距離は、近い・遠いの2通りに分類したが、距離に応じてより細かく分類しても良い。相対距離の変位、周辺のノード数、ノイズレベルも同様に細かく分類することができる。また、送信電力の制御も、常に一定の幅だけ調整せずに、条件に応じて調整する量を変えても良い。
【0055】
また、相対距離、相対距離の変位、周辺のノード数、ノイズ以外にも、通信相手から受信した電波の受信強度も考慮したマトリックスを作成し、これに基づいて送信電力を制御することもできる。
【0056】
本実施形態では、マトリックスを用いることで、簡単な処理で送信電力を決定することが可能となる。
【図面の簡単な説明】
【0057】
【図1】第1の実施形態における車載端末の機能ブロックを表す図である。
【図2】第1の実施形態における送信電力制御処理を示すフローチャートである。
【図3】第1の実施形態における送信電力制御処理を説明する図である。
【図4】第1の実施形態における送信電力制御処理を説明する図である。
【図5】第2の実施形態における送信電力制御処理を示すフローチャートである。
【図6】第2の実施形態における送信電力制御方法を説明する図である。
【図7】第2の実施形態における送信電力制御の例を示す図である。
【図8】従来の送信電力制御を用いた場合の電波状況を示す図である。
【図9】従来の送信電力制御を用いた場合の電波状況を示す図である。
【符号の説明】
【0058】
1 車載端末
2 通信部
3 位置情報取得部
4 電波状況取得部
5 距離予測部
6 通信制御部
31 自車位置情報取得部
32 他車位置情報取得部
A,B 車両
【特許請求の範囲】
【請求項1】
無線通信手段と、
自ノードと通信相手ノードとの所定時間後の相対距離を予測する予測手段と、
前記予測した相対距離に基づいて前記無線通信手段の送信電力を制御する通信制御手段と、
を有する移動端末。
【請求項2】
自ノードの位置及び移動速度並びに通信相手ノードの位置及び移動速度を取得する位置情報取得手段を有し、
前記予測手段は、前記位置情報取得手段が取得した情報に基づいて、前記相対距離を予測する
ことを特徴とする請求項1に記載の移動端末。
【請求項3】
自ノード周辺に存在するノード数、自ノード周辺におけるノイズレベル、および通信相手ノードから受信した電波の電波強度のうち少なくとも1つを含む電波状況を取得する電波状況取得手段を有し、
前記通信制御手段は、取得した電波状況も考慮して送信電力を制御する
ことを特徴とする請求項1又は2に記載の移動端末。
【請求項4】
請求項1〜3のいずれかに記載の移動端末を備えた車両。
【請求項5】
無線通信を行う移動端末が、
自ノードと通信相手ノードとの所定時間後の相対距離を予測し、
予測した相対距離に基づいて送信電力を制御する
送信電力制御方法。
【請求項6】
無線通信を行う移動端末に、
該ノードと通信相手ノードとの所定時間後の相対距離を予測させ、
予測した相対距離に基づいて送信電力を制御させる
プログラム。
【請求項1】
無線通信手段と、
自ノードと通信相手ノードとの所定時間後の相対距離を予測する予測手段と、
前記予測した相対距離に基づいて前記無線通信手段の送信電力を制御する通信制御手段と、
を有する移動端末。
【請求項2】
自ノードの位置及び移動速度並びに通信相手ノードの位置及び移動速度を取得する位置情報取得手段を有し、
前記予測手段は、前記位置情報取得手段が取得した情報に基づいて、前記相対距離を予測する
ことを特徴とする請求項1に記載の移動端末。
【請求項3】
自ノード周辺に存在するノード数、自ノード周辺におけるノイズレベル、および通信相手ノードから受信した電波の電波強度のうち少なくとも1つを含む電波状況を取得する電波状況取得手段を有し、
前記通信制御手段は、取得した電波状況も考慮して送信電力を制御する
ことを特徴とする請求項1又は2に記載の移動端末。
【請求項4】
請求項1〜3のいずれかに記載の移動端末を備えた車両。
【請求項5】
無線通信を行う移動端末が、
自ノードと通信相手ノードとの所定時間後の相対距離を予測し、
予測した相対距離に基づいて送信電力を制御する
送信電力制御方法。
【請求項6】
無線通信を行う移動端末に、
該ノードと通信相手ノードとの所定時間後の相対距離を予測させ、
予測した相対距離に基づいて送信電力を制御させる
プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2007−6395(P2007−6395A)
【公開日】平成19年1月11日(2007.1.11)
【国際特許分類】
【出願番号】特願2005−187165(P2005−187165)
【出願日】平成17年6月27日(2005.6.27)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成19年1月11日(2007.1.11)
【国際特許分類】
【出願日】平成17年6月27日(2005.6.27)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]