
移動装置
【課題】被駆動体と接触する部分が駆動力を低下させることなく、駆動可能な圧電体振動子を提供する。
【解決手段】圧電体振動子は、圧電素子を備える。外壁部と、圧電素子が取り付けられる上面部とを有し、圧延形成されたシムを備える。シムは、圧延形成された方向と被駆動体を移動させる第1方向との間を成す角が45度を有し、被駆動体は、第1方向に垂直な第2方向で、外壁部を付勢する。圧電体振動子を、伸縮モード振動を励起しない状態で、屈曲モード振動を励起するように、圧電素子に駆動周波数を変えながら電圧印加した場合であって、被駆動体が外壁部を付勢する点における第1方向の振幅が極大となる第1、第2駆動周波数との中間値近傍に、圧電体振動子の伸縮モード振動の共振周波数が設定される。被駆動体を第1方向に移動させる時は、第1、第2駆動周波数のいずれかを駆動周波数とする交流電圧印加が行われる。
【解決手段】圧電体振動子は、圧電素子を備える。外壁部と、圧電素子が取り付けられる上面部とを有し、圧延形成されたシムを備える。シムは、圧延形成された方向と被駆動体を移動させる第1方向との間を成す角が45度を有し、被駆動体は、第1方向に垂直な第2方向で、外壁部を付勢する。圧電体振動子を、伸縮モード振動を励起しない状態で、屈曲モード振動を励起するように、圧電素子に駆動周波数を変えながら電圧印加した場合であって、被駆動体が外壁部を付勢する点における第1方向の振幅が極大となる第1、第2駆動周波数との中間値近傍に、圧電体振動子の伸縮モード振動の共振周波数が設定される。被駆動体を第1方向に移動させる時は、第1、第2駆動周波数のいずれかを駆動周波数とする交流電圧印加が行われる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動装置に関し、特に被駆動体を一次元の任意の方向に移動させる移動装置に関する。
【背景技術】
【0002】
圧電体振動子を使って、被駆動体を一次元の任意の方向に移動させる移動装置が提案されている。特許文献1は、2つの突起部(接触点)で被駆動体に接触し、周波数変化によって1次元の移動方向を切り替える移動装置を開示する。
【特許文献1】特開2005−261080号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、特許文献1の装置は、2つの突起部のうち、いずれか一方は駆動に寄与せず、摩擦が駆動の妨げになっていた。
【0004】
したがって本発明の目的は、被駆動体と接触する部分が駆動力を低下させることなく、駆動可能な圧電体振動子を提供することである。
【課題を解決するための手段】
【0005】
本発明に係る圧電体振動子は、圧電素子と、外壁部と、圧電素子が取り付けられる上面部とを有し、圧延形成された金属弾性板で構成されたシムとを備える。シムは、圧延形成された方向と被駆動体を移動させる第1方向の一方または他方との間を成す角が第1角度を有し、被駆動体は、第1方向に垂直な第2方向で、外壁部を付勢する。圧電体振動子を、上面部の中心から外壁部への放射方向に伸縮する伸縮モード振動を励起しない状態で、第1方向に屈曲振動する屈曲モード振動を励起するように、圧電素子に駆動周波数を変えながら電圧印加した場合であって、被駆動体が外壁部を付勢する点における第1方向の振幅が極大となる第1ピークを示す時の第1駆動周波数と第1駆動周波数よりも高い周波数であって振幅が極大となる第2ピークを示す時の第2駆動周波数との中間値近傍に、圧電体振動子の伸縮モード振動の共振周波数が設定される。被駆動体を第1方向の一方に移動させる時は、圧電素子に、第1駆動周波数近傍の値を駆動周波数とする交流電圧印加が行われ、付勢する点において、屈曲モード振動と、伸縮モード振動が励起され、被駆動体を第1方向の他方に移動させる時は、圧電素子に、第2駆動周波数近傍の値を駆動周波数とする交流電圧印加が行われ、付勢する点において、屈曲モード振動と、伸縮モード振動が励起され、第1角度は、0度より大きく、90度より小さい値である。
【0006】
好ましくは、第1駆動周波数は、圧電体振動子の屈曲モード振動の共振周波数である。
【0007】
また、好ましくは、第1角度は、45度である。
【0008】
また、好ましくは、シムは、ステンレス鋼で構成される。
【0009】
また、好ましくは、圧電素子には、第1方向に並べて配置された第1〜第3電極が取り付けられ、第1、第3電極の少なくとも一方は、屈曲モード振動を励起するための交流電圧印加に使用され、第1方向xの両端部を含む外周部に配置され、第2電極は、伸縮モード振動を励起するための交流電圧印加に使用され、中央部に配置される。
【0010】
また、好ましくは、圧電素子には、第1方向に並べて配置された第1〜第3電極が取り付けられ、第1、第3電極の少なくとも一方は、屈曲モード振動を励起するための交流電圧印加に使用され、中央部に配置され、第2電極は、伸縮モード振動を励起するための交流電圧印加に使用され、第1方向の両端部を含む外周部に配置される。
【0011】
また、好ましくは、圧電素子には、第1方向に並べて配置された第1、第2電極が取り付けられ、第1、第2電極の少なくとも一方は、屈曲モード振動、及び伸縮モード振動を励起するための交流電圧印加に使用される。
【発明の効果】
【0012】
以上のように本発明によれば、被駆動体と接触する部分が駆動力を低下させることなく、駆動可能な圧電体振動子を提供することができる。
【発明を実施するための最良の形態】
【0013】
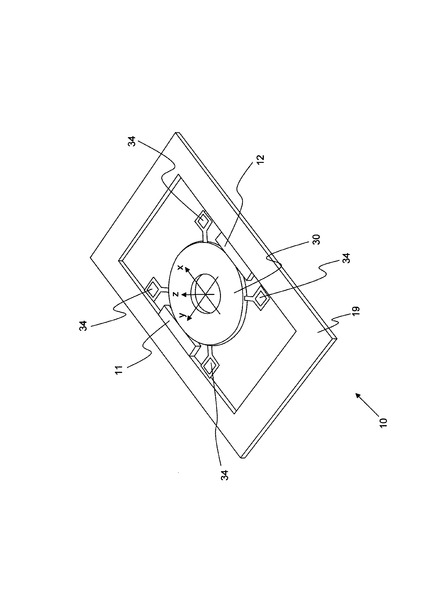
以下、本発明の実施形態について、図を用いて説明する。まず、第1実施形態について説明する。移動装置は、水平方向移動部10を有する可動部と、圧電体振動子30、固定台50、及び回路部70とを有する固定部とを備える(図1〜3参照)。なお、方向を説明するために、移動装置において水平方向移動部10の移動方向を第1方向x、第1方向xと直交する圧電体振動子30の付勢方向を第2方向y、第1方向x、第2方向yと直交する方向を第3方向zとして説明する。
【0014】
水平方向移動部(被駆動体)10は、第1、第2摩擦部材11、12、及び水平方向移動枠19を有する。水平方向移動部10は、第1方向xに移動可能である。従って、水平方向移動部10に、移動させたい部材を固定することにより、その部材を第1方向xに移動させることができる。
【0015】
第1、第2摩擦部材11、12は、直方体形状で、第2方向yに垂直な平面の一方は、圧電体振動子30と接触し、圧電体振動子30の振動により水平方向移動枠19と共に第1方向xに移動可能であり、他方は水平方向移動枠19の内側に取り付けられる。
【0016】
水平方向移動枠19は、内側に第3方向zに垂直な矩形の孔を有する平板状の枠であり、かかる内側の矩形孔に第1、第2摩擦部材11、12が取り付けられ、圧電体振動子30が配置される。
【0017】
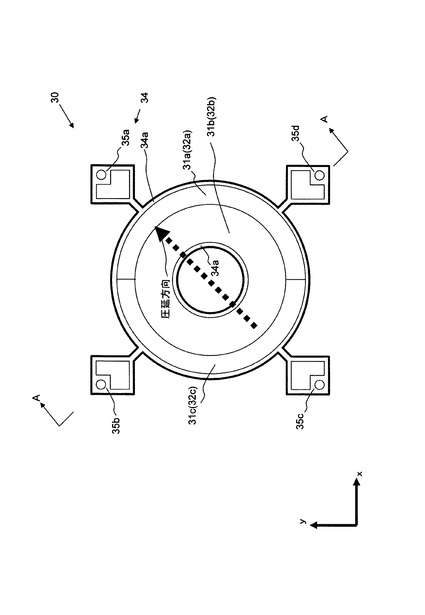
圧電体振動子30は、中空円柱形状の第1、第2圧電素子(圧電セラミックリング)31、32と、薄い金属の弾性板で構成されるシム34から構成され、シム34の両面(円柱形状の外壁部及び第3方向zと垂直な上面、下面)には第1、第2圧電素子31、32が固着される(図2参照)。
【0018】
第1、第2圧電素子31、32の第3方向zから見た表面には電極が設けられる。電極は第3方向zからみて3つに分割され、第1圧電素子31の第1、第2、第3電極31a、31b、31c、第2圧電素子32の第4、第5、第6電極32a、32b、32cが取り付けられる。なお、電極、及び圧電素子は、シム34の上面、下面のいずれか一方にだけ取り付けられた形態であってもよいが、第1実施形態のように両面に取り付けられた形態の方が、より強い駆動力を得ることが出来る。
【0019】
第1〜第3電極31a〜31cは第1方向xに並べて配置される。屈曲モード振動を励起するための交流電圧印加に使用される第1、第3電極31a、31cは、シム本体部34a(第1圧電素子31)上の第1方向xの端部を含む外周部に配置され、伸縮モード振動を励起するための交流電圧印加に使用される第2電極31bは、シム本体部34a(第1圧電素子31)上の中央部に配置される。第1、第3電極31a、31cは、圧電体振動子30のxy平面上の中心にxy平面上で対向する位置関係に配置される。
【0020】
第1電極31aと第4電極32aとは、第3方向zで対向するように配置され、同じ波形の第1交流電圧VE1が回路部70から印加される。第2電極31bと第5電極32bとは、第3方向zで対向するように配置され、同じ波形の第2交流電圧VE2が回路部70から印加される。第3電極31cと第6電極32cとは、第3方向zで対向するように配置され、同じ波形の第2交流電圧VE2が回路部70から印加される。
【0021】
第1交流電圧VE1と第2交流電圧VE2は、逆位相の関係にある。第1、第3、第4、第6電極31a、31c、32a、32cへの第1、第2交流電圧VE1、VE2の印加により、圧電体振動子30は第1方向xに屈曲振動する屈曲モード振動が励起される。第2、第5電極31b、32bへの第2交流電圧VE2の印加により、圧電体振動子30は半径方向(シム本体部34aの上面及び下面の中心から外壁部への放射方向)に伸縮する伸縮モード振動が励起される。第1、第2交流電圧VE1、VE2の駆動周波数は同じ第1駆動周波数f1または第2駆動周波数f2に設定される。
【0022】
水平方向移動部10の第1方向xの移動量は、第1増幅器73aなどにおける増幅率、及び各電圧へ印加時間を変化させることによって調整される。
【0023】
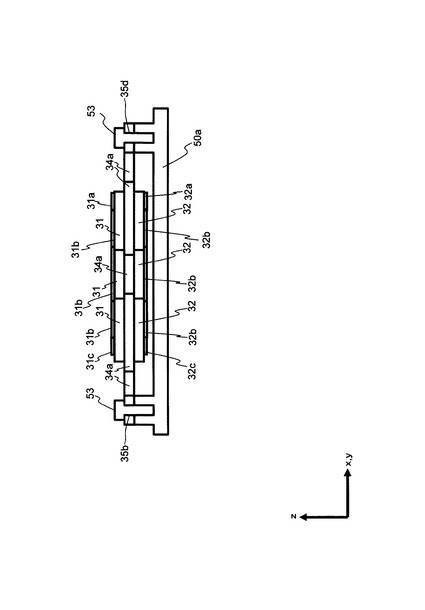
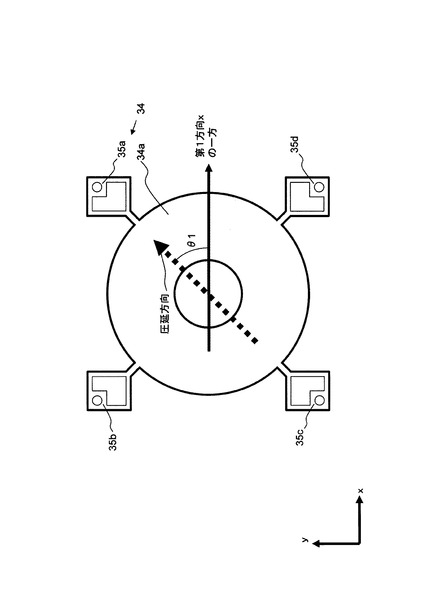
シム34は、第1、第2圧電素子31、32を両面に固着した中空円柱形状のシム本体部34a、固定台50に支持される第1、第2、第3、第4支持部35a、35b、35c、35dを有する(図2、3参照)。シム本体部34aは、円柱形状の外壁部で、第1摩擦部材11の付勢力と、第1摩擦部材11の付勢力に対する第2摩擦部材12の反力によって第2方向yに付勢される。第1、第2、第3、第4支持部35a、35b、35c、35dは、シム本体部34aから突出した部分で、それぞれが有する孔に固定部材53が挿入されることによって固定台50に取り付けられる。これにより、シム34を含む圧電体振動子30は固定台50に固定されて移動しない。一方、圧電体振動子30の振動により水平方向移動部10は第1方向xに移動可能である。
【0024】
シム34は、ステンレス鋼(18%のCrと8%のNiを含むステンレス鋼:SUS304))で構成される。シム34のシム本体部34aは、圧延方向が第1方向xの一方(正方向)または他方(負方向)との間を成す角度が第1角度θ1を有する状態で、取り付けられる。第1角度θ1は、45度(すなわち第1方向xと成す角度が45度または135度)であるのが望ましい(図4参照)。
【0025】
それぞれの電極に電圧が印加されない状態においては、第1、第2圧電素子31、32は変形を起こさず静止している。第1、第4電極31a、32aに第1交流電圧VE1が印加され、第3、第6電極31c、32cに第2交流電圧VE2が印加されると、圧電体振動子30は、第1方向xに屈曲振動する屈曲モード振動(シム34の中心穴が第1方向xに往復運動するような駆動方向の横振動)が励起される。第2、第5電極31b、32bに第2交流電圧VE2が印加されると、圧電体振動子30は、半径方向(シム本体部34aの上面及び下面の中心から外壁部への放射方向)に伸縮する伸縮モード振動(シム34の中心穴が膨張収縮を繰り返すような縦振動)が励起される。屈曲モード振動、及び伸縮モード振動により、シム本体部34aの外壁部で、第1、第2摩擦部材11、12と接触する部分(第1、第2摩擦部材11、12のシム本体部34aの外壁部を第2方向yに付勢する部分)は、楕円運動を行う。
【0026】
この楕円運動により、シム本体部34aの外壁部分を第2方向yに付勢した状態で接触する第1、第2摩擦部材11、12は、固定台50及び圧電体振動子30に対して第1方向xに移動せしめられ、これに伴って水平方向移動部10が第1方向xに移動せしめられる。
【0027】
圧電体振動子30の内径と外径の寸法比率を調整することにより、半径方向の振動(縦振動)の共振周波数fR、及び駆動方向の振動(横振動)共振周波数fXが決定される。第1実施形態では、半径方向の振動の共振周波数fRが、第1、第2駆動周波数f1、f2の中間値になるように寸法比率が設定される。
【0028】
駆動周波数を変えながら第1、第3、第4、第6電極31a、31c、32a、32cへの第1、第2交流電圧VE1、VE2の電圧印加だけを行い、第2、第5電極31b、32bへの第2交流電圧VE2の電圧印加を行わない状態(第1方向の屈曲モード振動を励起し、半径方向の伸縮モード振動を励起しない状態)で、シム本体部34aの外壁部で第1、第2摩擦部材11、12と接触する部分の第1方向xの振幅が2つのピーク(極大点)を示す時の、第1、第2交流電圧VE1、VE2を駆動する周波数が、第1、第2駆動周波数f1、f2に設定される。図5は、シム本体部34aの外壁部で第1摩擦部材11と接触する部分の振幅と、駆動周波数の関係を示す。第1実施形態では、高い方のピーク(第1ピーク)の振幅を示す時の周波数を第1周波数f1(=横振動の共振周波数fX)、低い方のピーク(第2ピーク)の振幅を示す時の周波数を第2周波数f2(>第1周波数f1)と設定する。
【0029】
第1駆動周波数f1で、第1、第2交流電圧VE1、VE2の電圧印加を行った場合、伸縮モード振動の位相が、屈曲モード振動の位相に比べて約90度進んでおり、第2駆動周波数f2で、第1、第2交流電圧VE1、VE2の電圧印加を行った場合は、屈曲モード振動の位相が、伸縮モード振動の位相に比べて約90度進む。このため、シム本体部34aの外壁部であって、第1、第2摩擦部材11、12と接触する点の楕円軌道は、第1駆動周波数f1で、第1、第2交流電圧VE1、VE2の電圧印加を行った場合と、第2駆動周波数f2で、第1、第2交流電圧VE1、VE2の電圧印加を行った場合とで、逆方向の回転になる。
【0030】
そのため、第1、第2交流電圧VE1、VE2の駆動周波数を、第1駆動周波数f1と第2駆動周波数f2とで切り替えることにより、水平方向移動部10を、第1方向xで且つ互いに逆方向に移動させることが可能になる。これにより、駆動方向を逆転させるために、駆動電極または位相を切り替える必要性がなくなるため、回路構成を簡素化することが可能になる。
【0031】
第1実施形態では、第1、第2摩擦部材11、12のシム本体部34aの外壁部と接触(付勢)する点は、いずれも、屈曲振動と伸縮振動が励起されて楕円運動を行って駆動に寄与する。そのため、駆動に際して、接触する部分が駆動力を妨げることはなく、効率よく移動制御を行うことが可能になる。
【0032】
固定台50は、固定台本体部50a、水平方向移動部10を第1方向xに摺動自在に支持する係合部材(不図示)、及び圧電体振動子30を固定する固定部材53を有する。
【0033】
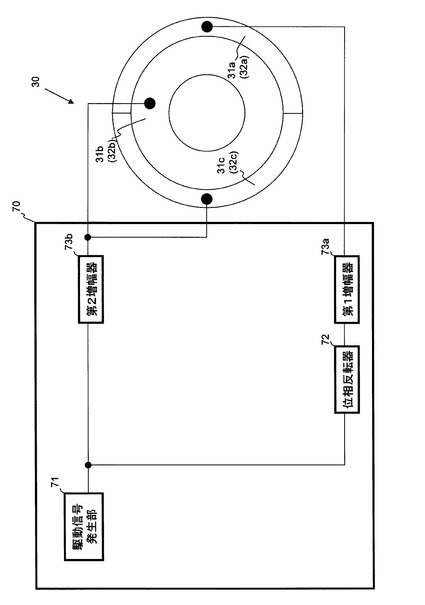
回路部70は、駆動信号発生部71、位相反転器72、及び第1、第2増幅器73a、73bを有する(図6参照)。
【0034】
駆動信号発生部71は、第1駆動周波数f1又は第2駆動周波数f2の正弦波を、出力時間(交流電圧の印加時間)を調整した状態で、出力する。駆動信号発生部71で出力する正弦波の駆動周波数は、水平方向移動部10を移動させる方向(第1方向xのいずれかの方向)に応じて、第1駆動周波数f1または第2駆動周波数f2に切り替えられる。駆動信号発生部71は、第2増幅器73b、位相反転器72と接続される。位相反転器72は、駆動信号発生部71から出力された駆動信号の位相を反転させる。位相反転器72は、第1増幅器73aに接続される。
【0035】
第1増幅器73aは、屈曲モード振動を励起するための第1、第4電極31a、32aと接続され、第1交流電圧VE1として印加する交流電圧の振幅を調整する。第2増幅器73bは、伸縮モード振動を励起するための第2、第5電極31b、32bと接続され、第2交流電圧VE2として印加する交流電圧の振幅を調整する。また、第2増幅器73bは、屈曲モード振動を励起するための第3、第6電極31c、32cと接続され、第2交流電圧VE2として印加する交流電圧の振幅を調整する。
【0036】
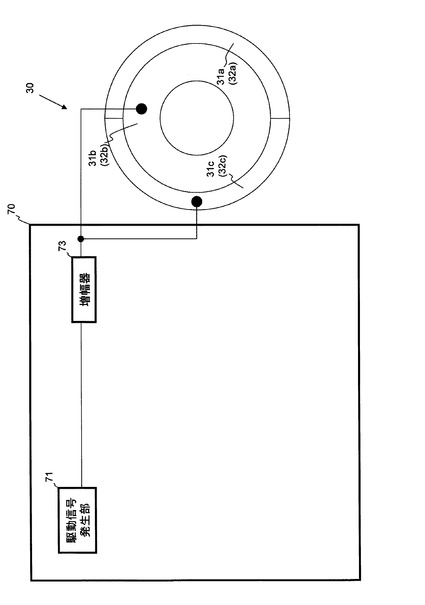
但し、位相反転器72、及び第1増幅器73aを設けず、第1、第4電極31a、32aに交流電圧を印加しない形態であってもよい(図9参照)。
【0037】
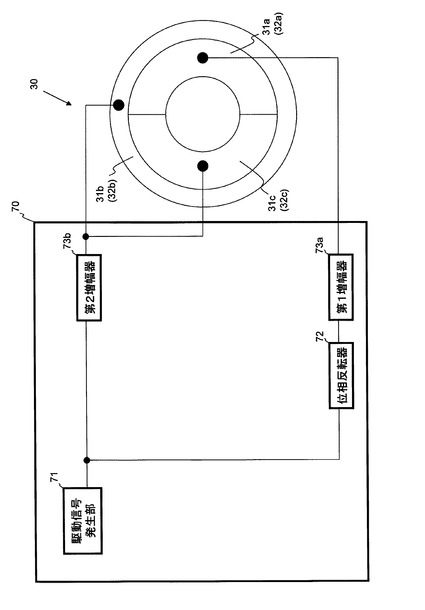
次に、第2実施形態について説明する(図7参照)。第2実施形態は、第1〜第3電極31a〜31c、及び第4〜第6電極32a〜32cの配置が第1実施形態と異なる。
【0038】
屈曲モード振動を励起するための第1、第3電極31a、31cが第1方向xに並べて配置され、その第1、第3電極31a、31cの外周に伸縮モード振動を励起するための第2電極31bが配置される。第2電極31bは、シム本体部34a(第1圧電素子31)上の第1方向xの端部を含む外周部に配置され、第1、第3電極31a、31cは、シム本体部34a(第1圧電素子31)上の中央部に配置される。第1、第3電極31a、31cは、圧電体振動子30のxy平面上の中心にxy平面上で対向する位置関係に配置される。
【0039】
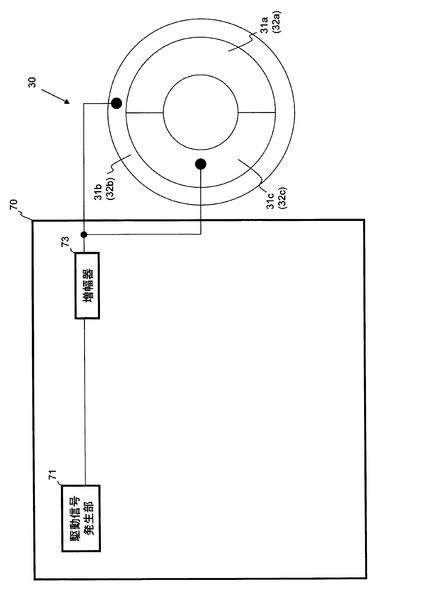
第1〜第3電極31a〜31cと、第4〜第6電極32a〜32cとの位置関係など、他の形態は第1実施形態と同様であり、位相反転器72、及び第1増幅器73aを設けず、第1、第4電極31a、32aに交流電圧を印加しない形態であってもよい(図10参照)。
【0040】
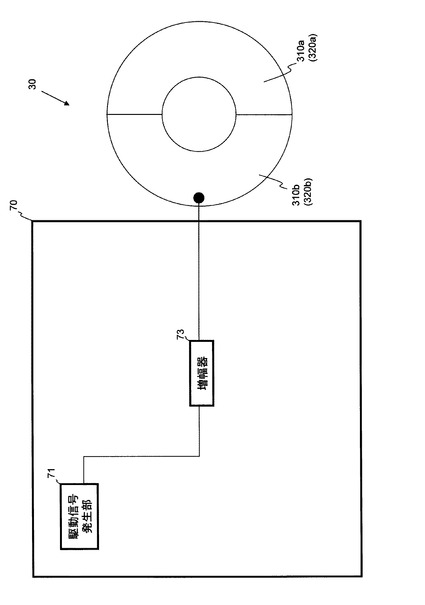
次に、第3実施形態について説明する(図8参照)。第3実施形態は、電極配置、及び回路部70の構成が第1実施形態と異なる。
【0041】
第1、第2圧電素子31、32の第3方向zから見た表面には電極が設けられる。電極は第3方向zからみて2つに分割され、第1圧電素子31の第1、第2電極310a、310b、第2圧電素子32の第3、第4電極320a、320bが取り付けられる。
【0042】
第1、第2電極310a、310bは第1方向xに並べて配置される。第1、第2電極310a、310cは、シム本体部34a(第1圧電素子31)上の第1方向xの端部を含む外周部から中心部にかけて配置される。第1、第2電極310a、310bは、圧電体振動子30のxy平面上の中心にxy平面上で対向する位置関係に配置される。
【0043】
第1電極310aと第3電極320aとは、第3方向zで対向するように配置され、交流電圧の印加が行われない。第2電極310bと第4電極320bとは、第3方向zで対向するように配置され、屈曲モード振動及び伸縮モード振動を励起するために同じ波形の交流電圧VEが回路部70から印加される。
【0044】
回路部70は、駆動信号発生部71、及び増幅器73を有する。
【0045】
駆動信号発生部71は、第1駆動周波数f1又は第2駆動周波数f2の正弦波を、出力時間(交流電圧の印加時間)を調整した状態で、出力する。駆動信号発生部71で出力する正弦波の駆動周波数は、水平方向移動部10を移動させる方向(第1方向xのいずれかの方向)に応じて、第1駆動周波数f1または第2駆動周波数f2に切り替えられる。駆動信号発生部71は、増幅器73と接続される。
【0046】
増幅器73は、交流電圧VEの振幅を調整する。増幅器73から出力された交流電圧VEは、第1、第2、第4電極310b、320bに印加される。
【0047】
その他の構成は、第1実施形態と同様である。
【0048】
なお、第1〜第3実施形態においては、装置の小型化、圧電体振動子の駆動効率の向上を優先的に考慮して、第1、第2圧電素子31、32、及びシム本体部34aの形状を中空円柱形状であるとしたが、mを4の倍数として正m角形や円柱形状など他の形状であっても一次元に移動させることは可能である。また、駆動信号を2系統(入力信号の数が2、図6、図7参照)設ける形態であっても、コストダウンなどの必要に応じて、1系統(入力信号の数が1、図8〜10参照)だけ設ける形態であってもよい。
【0049】
また、シム34の圧延方向と第1方向xの一方または他方との間を成す角度を示す第1角度θ1は、45度であるのが望ましいが、他の角度(0度よりも大きく90度よりも小さい角度)であってもよい。但し、45度から離れるに従って、第2ピークの振幅が小さくなり、第2駆動周波数f2における駆動力が弱くなり、第1駆動周波数f1における駆動力との差異も大きくなる。
【0050】
また、駆動信号発生部71からの正弦波の周波数(交流電圧の駆動周波数)を第1、第2駆動周波数f1、f2のいずれかに設定するとして説明したが、移動量の調整のために、第1、第2駆動周波数f1、f2と異なる値(第1、第2駆動周波数f1、f2近傍であって、励起される伸縮モード振動と屈曲モード振動との位相差が0にならない値)の周波数を用いても良い。この場合、第1、第2駆動周波数f1、f2に周波数を近づけるほど駆動力が大きくなり、多くの移動量が得られ、遠ざけるほど駆動力が小さくなり、少ない移動量になる。
【図面の簡単な説明】
【0051】
【図1】第1〜第3実施形態における水平方向移動部、及び圧電体振動子の構成を示す斜視図である。
【図2】第1実施形態における圧電体振動子の構成図である。
【図3】図2のA−A線における断面の構成図である。
【図4】シムの圧延方向を示す図である。
【図5】駆動周波数と、第1、第3、第4、第6電極への第1、第2交流電圧の電圧印加だけを行い、第2、第5電極への第2交流電圧の電圧印加を行わない状態で、シム本体部の外壁部で第1、第2摩擦部材と接触する部分の第1方向の振幅との関係を示すグラフである。
【図6】第1実施形態における回路部、及び電極の構成図である。
【図7】第2実施形態における回路部、及び電極の構成図である。
【図8】第3実施形態における回路部、及び電極の構成図である。
【図9】第1実施形態における回路部、及び電極の構成図で、第1、第4電極に交流電圧印加を行わない形態の図である。
【図10】第2実施形態における回路部、及び電極の構成図で、第1、第4電極に交流電圧印加を行わない形態の図である。
【符号の説明】
【0052】
10 水平方向移動部
11、12 第1、第2摩擦部材
19 水平方向移動枠
30 圧電体振動子
31、32 第1、第2圧電素子
31a、31b、31c 第1、第2、第3電極(第1、第2実施形態)
32a、32b、32c 第4、第5、第6電極(第1、第2実施形態)
310a、310b 第1、第2電極(第3実施形態)
320a、320b 第3、第4電極(第3実施形態)
34 シム
34a シム本体部
35a、35b、35c、35d 第1、第2、第3、第4支持部
50 固定台
50a 固定台本体部
53 固定部材
70 回路部
71 駆動信号発生部
72 位相反転器
73 増幅器
73a、73b 第1、第2増幅器
VE1、VE2 第1、第2交流電圧
θ1 第1角度
【技術分野】
【0001】
本発明は、移動装置に関し、特に被駆動体を一次元の任意の方向に移動させる移動装置に関する。
【背景技術】
【0002】
圧電体振動子を使って、被駆動体を一次元の任意の方向に移動させる移動装置が提案されている。特許文献1は、2つの突起部(接触点)で被駆動体に接触し、周波数変化によって1次元の移動方向を切り替える移動装置を開示する。
【特許文献1】特開2005−261080号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、特許文献1の装置は、2つの突起部のうち、いずれか一方は駆動に寄与せず、摩擦が駆動の妨げになっていた。
【0004】
したがって本発明の目的は、被駆動体と接触する部分が駆動力を低下させることなく、駆動可能な圧電体振動子を提供することである。
【課題を解決するための手段】
【0005】
本発明に係る圧電体振動子は、圧電素子と、外壁部と、圧電素子が取り付けられる上面部とを有し、圧延形成された金属弾性板で構成されたシムとを備える。シムは、圧延形成された方向と被駆動体を移動させる第1方向の一方または他方との間を成す角が第1角度を有し、被駆動体は、第1方向に垂直な第2方向で、外壁部を付勢する。圧電体振動子を、上面部の中心から外壁部への放射方向に伸縮する伸縮モード振動を励起しない状態で、第1方向に屈曲振動する屈曲モード振動を励起するように、圧電素子に駆動周波数を変えながら電圧印加した場合であって、被駆動体が外壁部を付勢する点における第1方向の振幅が極大となる第1ピークを示す時の第1駆動周波数と第1駆動周波数よりも高い周波数であって振幅が極大となる第2ピークを示す時の第2駆動周波数との中間値近傍に、圧電体振動子の伸縮モード振動の共振周波数が設定される。被駆動体を第1方向の一方に移動させる時は、圧電素子に、第1駆動周波数近傍の値を駆動周波数とする交流電圧印加が行われ、付勢する点において、屈曲モード振動と、伸縮モード振動が励起され、被駆動体を第1方向の他方に移動させる時は、圧電素子に、第2駆動周波数近傍の値を駆動周波数とする交流電圧印加が行われ、付勢する点において、屈曲モード振動と、伸縮モード振動が励起され、第1角度は、0度より大きく、90度より小さい値である。
【0006】
好ましくは、第1駆動周波数は、圧電体振動子の屈曲モード振動の共振周波数である。
【0007】
また、好ましくは、第1角度は、45度である。
【0008】
また、好ましくは、シムは、ステンレス鋼で構成される。
【0009】
また、好ましくは、圧電素子には、第1方向に並べて配置された第1〜第3電極が取り付けられ、第1、第3電極の少なくとも一方は、屈曲モード振動を励起するための交流電圧印加に使用され、第1方向xの両端部を含む外周部に配置され、第2電極は、伸縮モード振動を励起するための交流電圧印加に使用され、中央部に配置される。
【0010】
また、好ましくは、圧電素子には、第1方向に並べて配置された第1〜第3電極が取り付けられ、第1、第3電極の少なくとも一方は、屈曲モード振動を励起するための交流電圧印加に使用され、中央部に配置され、第2電極は、伸縮モード振動を励起するための交流電圧印加に使用され、第1方向の両端部を含む外周部に配置される。
【0011】
また、好ましくは、圧電素子には、第1方向に並べて配置された第1、第2電極が取り付けられ、第1、第2電極の少なくとも一方は、屈曲モード振動、及び伸縮モード振動を励起するための交流電圧印加に使用される。
【発明の効果】
【0012】
以上のように本発明によれば、被駆動体と接触する部分が駆動力を低下させることなく、駆動可能な圧電体振動子を提供することができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施形態について、図を用いて説明する。まず、第1実施形態について説明する。移動装置は、水平方向移動部10を有する可動部と、圧電体振動子30、固定台50、及び回路部70とを有する固定部とを備える(図1〜3参照)。なお、方向を説明するために、移動装置において水平方向移動部10の移動方向を第1方向x、第1方向xと直交する圧電体振動子30の付勢方向を第2方向y、第1方向x、第2方向yと直交する方向を第3方向zとして説明する。
【0014】
水平方向移動部(被駆動体)10は、第1、第2摩擦部材11、12、及び水平方向移動枠19を有する。水平方向移動部10は、第1方向xに移動可能である。従って、水平方向移動部10に、移動させたい部材を固定することにより、その部材を第1方向xに移動させることができる。
【0015】
第1、第2摩擦部材11、12は、直方体形状で、第2方向yに垂直な平面の一方は、圧電体振動子30と接触し、圧電体振動子30の振動により水平方向移動枠19と共に第1方向xに移動可能であり、他方は水平方向移動枠19の内側に取り付けられる。
【0016】
水平方向移動枠19は、内側に第3方向zに垂直な矩形の孔を有する平板状の枠であり、かかる内側の矩形孔に第1、第2摩擦部材11、12が取り付けられ、圧電体振動子30が配置される。
【0017】
圧電体振動子30は、中空円柱形状の第1、第2圧電素子(圧電セラミックリング)31、32と、薄い金属の弾性板で構成されるシム34から構成され、シム34の両面(円柱形状の外壁部及び第3方向zと垂直な上面、下面)には第1、第2圧電素子31、32が固着される(図2参照)。
【0018】
第1、第2圧電素子31、32の第3方向zから見た表面には電極が設けられる。電極は第3方向zからみて3つに分割され、第1圧電素子31の第1、第2、第3電極31a、31b、31c、第2圧電素子32の第4、第5、第6電極32a、32b、32cが取り付けられる。なお、電極、及び圧電素子は、シム34の上面、下面のいずれか一方にだけ取り付けられた形態であってもよいが、第1実施形態のように両面に取り付けられた形態の方が、より強い駆動力を得ることが出来る。
【0019】
第1〜第3電極31a〜31cは第1方向xに並べて配置される。屈曲モード振動を励起するための交流電圧印加に使用される第1、第3電極31a、31cは、シム本体部34a(第1圧電素子31)上の第1方向xの端部を含む外周部に配置され、伸縮モード振動を励起するための交流電圧印加に使用される第2電極31bは、シム本体部34a(第1圧電素子31)上の中央部に配置される。第1、第3電極31a、31cは、圧電体振動子30のxy平面上の中心にxy平面上で対向する位置関係に配置される。
【0020】
第1電極31aと第4電極32aとは、第3方向zで対向するように配置され、同じ波形の第1交流電圧VE1が回路部70から印加される。第2電極31bと第5電極32bとは、第3方向zで対向するように配置され、同じ波形の第2交流電圧VE2が回路部70から印加される。第3電極31cと第6電極32cとは、第3方向zで対向するように配置され、同じ波形の第2交流電圧VE2が回路部70から印加される。
【0021】
第1交流電圧VE1と第2交流電圧VE2は、逆位相の関係にある。第1、第3、第4、第6電極31a、31c、32a、32cへの第1、第2交流電圧VE1、VE2の印加により、圧電体振動子30は第1方向xに屈曲振動する屈曲モード振動が励起される。第2、第5電極31b、32bへの第2交流電圧VE2の印加により、圧電体振動子30は半径方向(シム本体部34aの上面及び下面の中心から外壁部への放射方向)に伸縮する伸縮モード振動が励起される。第1、第2交流電圧VE1、VE2の駆動周波数は同じ第1駆動周波数f1または第2駆動周波数f2に設定される。
【0022】
水平方向移動部10の第1方向xの移動量は、第1増幅器73aなどにおける増幅率、及び各電圧へ印加時間を変化させることによって調整される。
【0023】
シム34は、第1、第2圧電素子31、32を両面に固着した中空円柱形状のシム本体部34a、固定台50に支持される第1、第2、第3、第4支持部35a、35b、35c、35dを有する(図2、3参照)。シム本体部34aは、円柱形状の外壁部で、第1摩擦部材11の付勢力と、第1摩擦部材11の付勢力に対する第2摩擦部材12の反力によって第2方向yに付勢される。第1、第2、第3、第4支持部35a、35b、35c、35dは、シム本体部34aから突出した部分で、それぞれが有する孔に固定部材53が挿入されることによって固定台50に取り付けられる。これにより、シム34を含む圧電体振動子30は固定台50に固定されて移動しない。一方、圧電体振動子30の振動により水平方向移動部10は第1方向xに移動可能である。
【0024】
シム34は、ステンレス鋼(18%のCrと8%のNiを含むステンレス鋼:SUS304))で構成される。シム34のシム本体部34aは、圧延方向が第1方向xの一方(正方向)または他方(負方向)との間を成す角度が第1角度θ1を有する状態で、取り付けられる。第1角度θ1は、45度(すなわち第1方向xと成す角度が45度または135度)であるのが望ましい(図4参照)。
【0025】
それぞれの電極に電圧が印加されない状態においては、第1、第2圧電素子31、32は変形を起こさず静止している。第1、第4電極31a、32aに第1交流電圧VE1が印加され、第3、第6電極31c、32cに第2交流電圧VE2が印加されると、圧電体振動子30は、第1方向xに屈曲振動する屈曲モード振動(シム34の中心穴が第1方向xに往復運動するような駆動方向の横振動)が励起される。第2、第5電極31b、32bに第2交流電圧VE2が印加されると、圧電体振動子30は、半径方向(シム本体部34aの上面及び下面の中心から外壁部への放射方向)に伸縮する伸縮モード振動(シム34の中心穴が膨張収縮を繰り返すような縦振動)が励起される。屈曲モード振動、及び伸縮モード振動により、シム本体部34aの外壁部で、第1、第2摩擦部材11、12と接触する部分(第1、第2摩擦部材11、12のシム本体部34aの外壁部を第2方向yに付勢する部分)は、楕円運動を行う。
【0026】
この楕円運動により、シム本体部34aの外壁部分を第2方向yに付勢した状態で接触する第1、第2摩擦部材11、12は、固定台50及び圧電体振動子30に対して第1方向xに移動せしめられ、これに伴って水平方向移動部10が第1方向xに移動せしめられる。
【0027】
圧電体振動子30の内径と外径の寸法比率を調整することにより、半径方向の振動(縦振動)の共振周波数fR、及び駆動方向の振動(横振動)共振周波数fXが決定される。第1実施形態では、半径方向の振動の共振周波数fRが、第1、第2駆動周波数f1、f2の中間値になるように寸法比率が設定される。
【0028】
駆動周波数を変えながら第1、第3、第4、第6電極31a、31c、32a、32cへの第1、第2交流電圧VE1、VE2の電圧印加だけを行い、第2、第5電極31b、32bへの第2交流電圧VE2の電圧印加を行わない状態(第1方向の屈曲モード振動を励起し、半径方向の伸縮モード振動を励起しない状態)で、シム本体部34aの外壁部で第1、第2摩擦部材11、12と接触する部分の第1方向xの振幅が2つのピーク(極大点)を示す時の、第1、第2交流電圧VE1、VE2を駆動する周波数が、第1、第2駆動周波数f1、f2に設定される。図5は、シム本体部34aの外壁部で第1摩擦部材11と接触する部分の振幅と、駆動周波数の関係を示す。第1実施形態では、高い方のピーク(第1ピーク)の振幅を示す時の周波数を第1周波数f1(=横振動の共振周波数fX)、低い方のピーク(第2ピーク)の振幅を示す時の周波数を第2周波数f2(>第1周波数f1)と設定する。
【0029】
第1駆動周波数f1で、第1、第2交流電圧VE1、VE2の電圧印加を行った場合、伸縮モード振動の位相が、屈曲モード振動の位相に比べて約90度進んでおり、第2駆動周波数f2で、第1、第2交流電圧VE1、VE2の電圧印加を行った場合は、屈曲モード振動の位相が、伸縮モード振動の位相に比べて約90度進む。このため、シム本体部34aの外壁部であって、第1、第2摩擦部材11、12と接触する点の楕円軌道は、第1駆動周波数f1で、第1、第2交流電圧VE1、VE2の電圧印加を行った場合と、第2駆動周波数f2で、第1、第2交流電圧VE1、VE2の電圧印加を行った場合とで、逆方向の回転になる。
【0030】
そのため、第1、第2交流電圧VE1、VE2の駆動周波数を、第1駆動周波数f1と第2駆動周波数f2とで切り替えることにより、水平方向移動部10を、第1方向xで且つ互いに逆方向に移動させることが可能になる。これにより、駆動方向を逆転させるために、駆動電極または位相を切り替える必要性がなくなるため、回路構成を簡素化することが可能になる。
【0031】
第1実施形態では、第1、第2摩擦部材11、12のシム本体部34aの外壁部と接触(付勢)する点は、いずれも、屈曲振動と伸縮振動が励起されて楕円運動を行って駆動に寄与する。そのため、駆動に際して、接触する部分が駆動力を妨げることはなく、効率よく移動制御を行うことが可能になる。
【0032】
固定台50は、固定台本体部50a、水平方向移動部10を第1方向xに摺動自在に支持する係合部材(不図示)、及び圧電体振動子30を固定する固定部材53を有する。
【0033】
回路部70は、駆動信号発生部71、位相反転器72、及び第1、第2増幅器73a、73bを有する(図6参照)。
【0034】
駆動信号発生部71は、第1駆動周波数f1又は第2駆動周波数f2の正弦波を、出力時間(交流電圧の印加時間)を調整した状態で、出力する。駆動信号発生部71で出力する正弦波の駆動周波数は、水平方向移動部10を移動させる方向(第1方向xのいずれかの方向)に応じて、第1駆動周波数f1または第2駆動周波数f2に切り替えられる。駆動信号発生部71は、第2増幅器73b、位相反転器72と接続される。位相反転器72は、駆動信号発生部71から出力された駆動信号の位相を反転させる。位相反転器72は、第1増幅器73aに接続される。
【0035】
第1増幅器73aは、屈曲モード振動を励起するための第1、第4電極31a、32aと接続され、第1交流電圧VE1として印加する交流電圧の振幅を調整する。第2増幅器73bは、伸縮モード振動を励起するための第2、第5電極31b、32bと接続され、第2交流電圧VE2として印加する交流電圧の振幅を調整する。また、第2増幅器73bは、屈曲モード振動を励起するための第3、第6電極31c、32cと接続され、第2交流電圧VE2として印加する交流電圧の振幅を調整する。
【0036】
但し、位相反転器72、及び第1増幅器73aを設けず、第1、第4電極31a、32aに交流電圧を印加しない形態であってもよい(図9参照)。
【0037】
次に、第2実施形態について説明する(図7参照)。第2実施形態は、第1〜第3電極31a〜31c、及び第4〜第6電極32a〜32cの配置が第1実施形態と異なる。
【0038】
屈曲モード振動を励起するための第1、第3電極31a、31cが第1方向xに並べて配置され、その第1、第3電極31a、31cの外周に伸縮モード振動を励起するための第2電極31bが配置される。第2電極31bは、シム本体部34a(第1圧電素子31)上の第1方向xの端部を含む外周部に配置され、第1、第3電極31a、31cは、シム本体部34a(第1圧電素子31)上の中央部に配置される。第1、第3電極31a、31cは、圧電体振動子30のxy平面上の中心にxy平面上で対向する位置関係に配置される。
【0039】
第1〜第3電極31a〜31cと、第4〜第6電極32a〜32cとの位置関係など、他の形態は第1実施形態と同様であり、位相反転器72、及び第1増幅器73aを設けず、第1、第4電極31a、32aに交流電圧を印加しない形態であってもよい(図10参照)。
【0040】
次に、第3実施形態について説明する(図8参照)。第3実施形態は、電極配置、及び回路部70の構成が第1実施形態と異なる。
【0041】
第1、第2圧電素子31、32の第3方向zから見た表面には電極が設けられる。電極は第3方向zからみて2つに分割され、第1圧電素子31の第1、第2電極310a、310b、第2圧電素子32の第3、第4電極320a、320bが取り付けられる。
【0042】
第1、第2電極310a、310bは第1方向xに並べて配置される。第1、第2電極310a、310cは、シム本体部34a(第1圧電素子31)上の第1方向xの端部を含む外周部から中心部にかけて配置される。第1、第2電極310a、310bは、圧電体振動子30のxy平面上の中心にxy平面上で対向する位置関係に配置される。
【0043】
第1電極310aと第3電極320aとは、第3方向zで対向するように配置され、交流電圧の印加が行われない。第2電極310bと第4電極320bとは、第3方向zで対向するように配置され、屈曲モード振動及び伸縮モード振動を励起するために同じ波形の交流電圧VEが回路部70から印加される。
【0044】
回路部70は、駆動信号発生部71、及び増幅器73を有する。
【0045】
駆動信号発生部71は、第1駆動周波数f1又は第2駆動周波数f2の正弦波を、出力時間(交流電圧の印加時間)を調整した状態で、出力する。駆動信号発生部71で出力する正弦波の駆動周波数は、水平方向移動部10を移動させる方向(第1方向xのいずれかの方向)に応じて、第1駆動周波数f1または第2駆動周波数f2に切り替えられる。駆動信号発生部71は、増幅器73と接続される。
【0046】
増幅器73は、交流電圧VEの振幅を調整する。増幅器73から出力された交流電圧VEは、第1、第2、第4電極310b、320bに印加される。
【0047】
その他の構成は、第1実施形態と同様である。
【0048】
なお、第1〜第3実施形態においては、装置の小型化、圧電体振動子の駆動効率の向上を優先的に考慮して、第1、第2圧電素子31、32、及びシム本体部34aの形状を中空円柱形状であるとしたが、mを4の倍数として正m角形や円柱形状など他の形状であっても一次元に移動させることは可能である。また、駆動信号を2系統(入力信号の数が2、図6、図7参照)設ける形態であっても、コストダウンなどの必要に応じて、1系統(入力信号の数が1、図8〜10参照)だけ設ける形態であってもよい。
【0049】
また、シム34の圧延方向と第1方向xの一方または他方との間を成す角度を示す第1角度θ1は、45度であるのが望ましいが、他の角度(0度よりも大きく90度よりも小さい角度)であってもよい。但し、45度から離れるに従って、第2ピークの振幅が小さくなり、第2駆動周波数f2における駆動力が弱くなり、第1駆動周波数f1における駆動力との差異も大きくなる。
【0050】
また、駆動信号発生部71からの正弦波の周波数(交流電圧の駆動周波数)を第1、第2駆動周波数f1、f2のいずれかに設定するとして説明したが、移動量の調整のために、第1、第2駆動周波数f1、f2と異なる値(第1、第2駆動周波数f1、f2近傍であって、励起される伸縮モード振動と屈曲モード振動との位相差が0にならない値)の周波数を用いても良い。この場合、第1、第2駆動周波数f1、f2に周波数を近づけるほど駆動力が大きくなり、多くの移動量が得られ、遠ざけるほど駆動力が小さくなり、少ない移動量になる。
【図面の簡単な説明】
【0051】
【図1】第1〜第3実施形態における水平方向移動部、及び圧電体振動子の構成を示す斜視図である。
【図2】第1実施形態における圧電体振動子の構成図である。
【図3】図2のA−A線における断面の構成図である。
【図4】シムの圧延方向を示す図である。
【図5】駆動周波数と、第1、第3、第4、第6電極への第1、第2交流電圧の電圧印加だけを行い、第2、第5電極への第2交流電圧の電圧印加を行わない状態で、シム本体部の外壁部で第1、第2摩擦部材と接触する部分の第1方向の振幅との関係を示すグラフである。
【図6】第1実施形態における回路部、及び電極の構成図である。
【図7】第2実施形態における回路部、及び電極の構成図である。
【図8】第3実施形態における回路部、及び電極の構成図である。
【図9】第1実施形態における回路部、及び電極の構成図で、第1、第4電極に交流電圧印加を行わない形態の図である。
【図10】第2実施形態における回路部、及び電極の構成図で、第1、第4電極に交流電圧印加を行わない形態の図である。
【符号の説明】
【0052】
10 水平方向移動部
11、12 第1、第2摩擦部材
19 水平方向移動枠
30 圧電体振動子
31、32 第1、第2圧電素子
31a、31b、31c 第1、第2、第3電極(第1、第2実施形態)
32a、32b、32c 第4、第5、第6電極(第1、第2実施形態)
310a、310b 第1、第2電極(第3実施形態)
320a、320b 第3、第4電極(第3実施形態)
34 シム
34a シム本体部
35a、35b、35c、35d 第1、第2、第3、第4支持部
50 固定台
50a 固定台本体部
53 固定部材
70 回路部
71 駆動信号発生部
72 位相反転器
73 増幅器
73a、73b 第1、第2増幅器
VE1、VE2 第1、第2交流電圧
θ1 第1角度
【特許請求の範囲】
【請求項1】
圧電素子と、
外壁部と、前記圧電素子が取り付けられる上面部とを有し、圧延形成された金属弾性板で構成されたシムとを備えた圧電体振動子であって、
前記シムは、前記圧延形成された方向と被駆動体を移動させる第1方向の一方または他方との間を成す角が第1角度を有し、
前記被駆動体は、前記第1方向に垂直な第2方向で、前記外壁部を付勢し、
前記圧電体振動子を、前記上面部の中心から前記外壁部への放射方向に伸縮する伸縮モード振動を励起しない状態で、前記第1方向に屈曲振動する屈曲モード振動を励起するように、前記圧電素子に駆動周波数を変えながら電圧印加した場合であって、前記被駆動体が前記外壁部を付勢する点における前記第1方向の振幅が極大となる第1ピークを示す時の第1駆動周波数と前記第1駆動周波数よりも高い周波数であって前記振幅が極大となる第2ピークを示す時の第2駆動周波数との中間値近傍に、前記圧電体振動子の前記伸縮モード振動の共振周波数が設定され、
前記被駆動体を前記第1方向の一方に移動させる時は、前記圧電素子に、前記第1駆動周波数近傍の値を駆動周波数とする交流電圧印加が行われ、前記付勢する点において、前記屈曲モード振動と、前記伸縮モード振動が励起され、
前記被駆動体を前記第1方向の他方に移動させる時は、前記圧電素子に、前記第2駆動周波数近傍の値を駆動周波数とする交流電圧印加が行われ、前記付勢する点において、前記屈曲モード振動と、前記伸縮モード振動が励起され、
前記第1角度は、0度より大きく、90度より小さい値であることを特徴とする圧電体振動子。
【請求項2】
前記第1駆動周波数は、前記圧電体振動子の前記屈曲モード振動の共振周波数であることを特徴とする請求項1に記載の圧電体振動子。
【請求項3】
前記第1角度は、45度であることを特徴とする請求項1に記載の圧電体振動子。
【請求項4】
前記シムは、ステンレス鋼で構成されることを特徴とする請求項1に記載の圧電体振動子。
【請求項5】
前記圧電素子には、前記第1方向に並べて配置された第1〜第3電極が取り付けられ、
前記第1、第3電極の少なくとも一方は、前記屈曲モード振動を励起するための交流電圧印加に使用され、前記第1方向xの両端部を含む外周部に配置され、
第2電極は、前記伸縮モード振動を励起するための交流電圧印加に使用され、中央部に配置されることを特徴とする請求項1に記載の圧電体振動子。
【請求項6】
前記圧電素子には、前記第1方向に並べて配置された第1〜第3電極が取り付けられ、
前記第1、第3電極の少なくとも一方は、前記屈曲モード振動を励起するための交流電圧印加に使用され、中央部に配置され、
第2電極は、前記伸縮モード振動を励起するための交流電圧印加に使用され、前記第1方向の両端部を含む外周部に配置されることを特徴とする請求項1に記載の圧電体振動子。
【請求項7】
前記圧電素子には、前記第1方向に並べて配置された第1、第2電極が取り付けられ、
前記第1、第2電極の少なくとも一方は、前記屈曲モード振動、及び前記伸縮モード振動を励起するための交流電圧印加に使用されることを特徴とする請求項1に記載の圧電体振動子。
【請求項1】
圧電素子と、
外壁部と、前記圧電素子が取り付けられる上面部とを有し、圧延形成された金属弾性板で構成されたシムとを備えた圧電体振動子であって、
前記シムは、前記圧延形成された方向と被駆動体を移動させる第1方向の一方または他方との間を成す角が第1角度を有し、
前記被駆動体は、前記第1方向に垂直な第2方向で、前記外壁部を付勢し、
前記圧電体振動子を、前記上面部の中心から前記外壁部への放射方向に伸縮する伸縮モード振動を励起しない状態で、前記第1方向に屈曲振動する屈曲モード振動を励起するように、前記圧電素子に駆動周波数を変えながら電圧印加した場合であって、前記被駆動体が前記外壁部を付勢する点における前記第1方向の振幅が極大となる第1ピークを示す時の第1駆動周波数と前記第1駆動周波数よりも高い周波数であって前記振幅が極大となる第2ピークを示す時の第2駆動周波数との中間値近傍に、前記圧電体振動子の前記伸縮モード振動の共振周波数が設定され、
前記被駆動体を前記第1方向の一方に移動させる時は、前記圧電素子に、前記第1駆動周波数近傍の値を駆動周波数とする交流電圧印加が行われ、前記付勢する点において、前記屈曲モード振動と、前記伸縮モード振動が励起され、
前記被駆動体を前記第1方向の他方に移動させる時は、前記圧電素子に、前記第2駆動周波数近傍の値を駆動周波数とする交流電圧印加が行われ、前記付勢する点において、前記屈曲モード振動と、前記伸縮モード振動が励起され、
前記第1角度は、0度より大きく、90度より小さい値であることを特徴とする圧電体振動子。
【請求項2】
前記第1駆動周波数は、前記圧電体振動子の前記屈曲モード振動の共振周波数であることを特徴とする請求項1に記載の圧電体振動子。
【請求項3】
前記第1角度は、45度であることを特徴とする請求項1に記載の圧電体振動子。
【請求項4】
前記シムは、ステンレス鋼で構成されることを特徴とする請求項1に記載の圧電体振動子。
【請求項5】
前記圧電素子には、前記第1方向に並べて配置された第1〜第3電極が取り付けられ、
前記第1、第3電極の少なくとも一方は、前記屈曲モード振動を励起するための交流電圧印加に使用され、前記第1方向xの両端部を含む外周部に配置され、
第2電極は、前記伸縮モード振動を励起するための交流電圧印加に使用され、中央部に配置されることを特徴とする請求項1に記載の圧電体振動子。
【請求項6】
前記圧電素子には、前記第1方向に並べて配置された第1〜第3電極が取り付けられ、
前記第1、第3電極の少なくとも一方は、前記屈曲モード振動を励起するための交流電圧印加に使用され、中央部に配置され、
第2電極は、前記伸縮モード振動を励起するための交流電圧印加に使用され、前記第1方向の両端部を含む外周部に配置されることを特徴とする請求項1に記載の圧電体振動子。
【請求項7】
前記圧電素子には、前記第1方向に並べて配置された第1、第2電極が取り付けられ、
前記第1、第2電極の少なくとも一方は、前記屈曲モード振動、及び前記伸縮モード振動を励起するための交流電圧印加に使用されることを特徴とする請求項1に記載の圧電体振動子。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2008−131681(P2008−131681A)
【公開日】平成20年6月5日(2008.6.5)
【国際特許分類】
【出願番号】特願2006−310675(P2006−310675)
【出願日】平成18年11月16日(2006.11.16)
【出願人】(000000527)ペンタックス株式会社 (1,878)
【Fターム(参考)】
【公開日】平成20年6月5日(2008.6.5)
【国際特許分類】
【出願日】平成18年11月16日(2006.11.16)
【出願人】(000000527)ペンタックス株式会社 (1,878)
【Fターム(参考)】
[ Back to top ]