
移動車両用エネルギー伝達システムおよび方法

【課題】移動車両に対して効率よく無線電力供給する。
【解決手段】エネルギー伝達システムは送信機アレイ、伝達制御装置、受信機アレイ、充電モジュールを有する。送信機アレイは道路に埋設され、伝達制御装置は送信機アレイに結合される。受信機アレイおよび充電モジュールは移動車両の一部である。送信機アレイおよび受信機アレイはそれぞれ複数のコイルを含む。伝達制御装置は移動車両の軌道を推定し、この位置推定を利用して送信機アレイの個々のコイルに電力供給する。伝達制御装置は伝達サイクル中に共振結合キャパシタンス値等の送信機アレイの共振回路要素の値を変更する。充電モジュールもまた受信機アレイ内のコイルの共振回路要素の値を変更して、送信機アレイから受信機アレイへのエネルギー伝達において送信機アレイと同調するようにする。本発明はまたエネルギー伝達方法も提供する。
【解決手段】エネルギー伝達システムは送信機アレイ、伝達制御装置、受信機アレイ、充電モジュールを有する。送信機アレイは道路に埋設され、伝達制御装置は送信機アレイに結合される。受信機アレイおよび充電モジュールは移動車両の一部である。送信機アレイおよび受信機アレイはそれぞれ複数のコイルを含む。伝達制御装置は移動車両の軌道を推定し、この位置推定を利用して送信機アレイの個々のコイルに電力供給する。伝達制御装置は伝達サイクル中に共振結合キャパシタンス値等の送信機アレイの共振回路要素の値を変更する。充電モジュールもまた受信機アレイ内のコイルの共振回路要素の値を変更して、送信機アレイから受信機アレイへのエネルギー伝達において送信機アレイと同調するようにする。本発明はまたエネルギー伝達方法も提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はエネルギーを伝達するためのシステムおよび方法に関わるものであり、特に道路から移動する車両にエネルギーを伝達するシステムおよび方法に関わる。
【0002】
ここで「道路」及び「車両」は広義に解するものとする。即ち、両要素は通路と電動式の移動システムであってもよい。本発明は屋内用のより小規模なシステムの一部として用いることもできる。その場合、道路あるいは通路を床あるいは走路と言い換えてもよく、また車両はカート、スクーター、またはフォークリフトトラック等と言い換えてもよい。
【背景技術】
【0003】
化石燃料が過去の遺物となるにつれ、代替エネルギー源がエネルギーの活用、貯蔵および利用における新時代を先導している。特に自動車の分野ではかつてガソリンの燃焼により駆動されていたエンジンが、車両内のバッテリに蓄えられた電力により動作するエンジンに置き換えられつつある。これは汚染、特に炭素エミッションのような問題を解決する一方で、新たな問題を生みだしている。
【0004】
その課題の一つは後の使用に供するためにバッテリ等のエネルギー源を充填即ち充電することである。現在エネルギー源を充電するにはエネルギー伝達センターを見つけ、遂行中の作業を中断してエネルギー伝達のために停車する必要がある。特に問題となるのは、電動車両の電源を充電するのに3時間以上はかからないとしても、多くの場合2時間程度はかかることである。このようなエネルギー伝達センターの一例はガソリンを販売し供給するガソリンスタンド(サービスステーション)である。しかし既存のガソリンスタンドの大部分は充電中の車両を駐車する十分な駐車スペースを持たない。
【0005】
完全電気車両の多くは、車両を使用しないときに駐車しておくガレージにおいて充電される。例えば壁コンセントにプラグを挿してエネルギー貯蔵器を充電する。この方法は用途が通勤に限られる車両においては許容できるが、より長距離を走行する場合には利用性を制限することになる。このため多くの場合、完全電化車両の利用可能範囲は100マイル(約160キロメートル)以下に制限される。
【0006】
走行中の車両にエネルギーを伝達しようという試みがなされて来たが、これまでのところ成果は上がっていない。特に問題となるのは車両が伝達コイル上を高速で移動することである。車両の速度が大きければ伝達時間は短くなる。このため、既存のシステムでは走行中の車両に効果的にエネルギーを伝達することができない。また、静止した対象に対して有効な方法を用いたエネルギー伝達センターを開発する試みもなされているが、このような方法では移動する対象を充電することはできない。
【0007】
一時的なエネルギー貯蔵用の電気システムの潜在的な用途については以下の文献に記載されている。
【先行技術文献】
【非特許文献】
【0008】
【非特許文献1】W.Kempton and Steven Letendre, "Electric Vehicles as a New source of Power for Electric Utilities", Transportation Research 2(3), pp.157-175, 1997
【発明の概要】
【0009】
本発明は移動車両用のエネルギー伝達システムにおいて従来技術の問題を解決するものである。本発明のシステムは送信機アレイと、エネルギー伝達制御装置と、受信機アレイと、充電モジュールとを有する。一実施形態において、送信機アレイは道路に埋設されており、またエネルギー伝達制御装置は送信機アレイに結合されかつ道路付近に設置される。受信機アレイおよび充電モジュールは電動自動車等の移動車両の一部である。送信機アレイおよび受信機アレイはそれぞれ複数のコイルを含む。エネルギー伝達制御装置は移動車両の予想される軌道を推定し、この位置推定を利用して送信機アレイの個々のコイルに電力供給する。エネルギー伝達制御装置は伝達サイクル中に共振結合キャパシタンス値等の送信機アレイの共振回路要素の値を変更する。充電モジュールもまた受信機アレイ内のコイルの共振回路要素の値を変更して、送信機アレイから受信機アレイへのエネルギー伝達において送信機アレイと同調するようにする。伝達周波数即ちコイル共振周波数(インダクタンスあるいはキャパシタンス)を送信機アレイと受信機アレイの双方で調節し、異なる天候および道路状態において最大の伝達効率を実現する。最適な整調(チューニング)はコイルの結合係数を含む多くの要因により変化する。結合係数は道路上での車両の正確な位置を推定するモジュールを用いて変更する。共振要素のリアルタイム調節には、伝達効率を向上するために車両位置データを用いる。本発明はまたエネルギー伝達方法も提供する。
【0010】
上記システムにおいて、送信機アレイは道路内に位置し、受信機は車両内に位置するものとして説明している。他の実施形態では、車両内に送信機アレイを有し、道路内に受信機アレイを有する場合もある。また、道路および車両共に送信機アレイと受信機アレイとの両方を備えるようにし、エネルギー伝達制御装置の制御の下にいずれの方向にもエネルギー伝達ができるようにすることも可能である。誘導コイル等のある種の送信および受信部品は車両内および道路内での双方向の送受信(即ちエネルギーの送出と受給)用に利用することができ、スペースとコストが削減できる。双方向のエネルギー伝達は、日常的には電気エネルギーを車両に供給し、時折車両から道路にエネルギーを与えるように利用してもよい。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施例によるエネルギー伝達システムを示すブロック図である。
【図2】本発明の別の一実施例によるエネルギー伝達システムを示すブロック図である。
【図3】本発明の一実施例による、受信機アレイ、充電モジュール、およびエネルギー貯蔵ユニットを備えた移動車両を示すブロック図である。
【図4A】本発明の一実施例による送信機アレイを示すブロック図である。
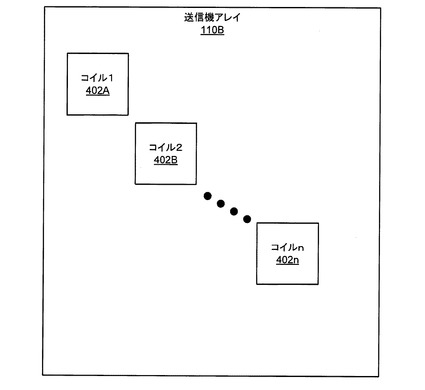
【図4B】本発明の第二の実施例による送信機アレイを示すブロック図である。
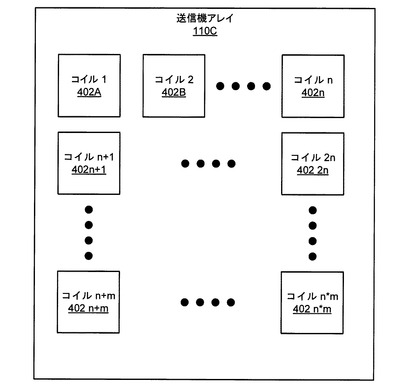
【図4C】本発明の第三の実施例による送信機アレイを示すブロック図である。
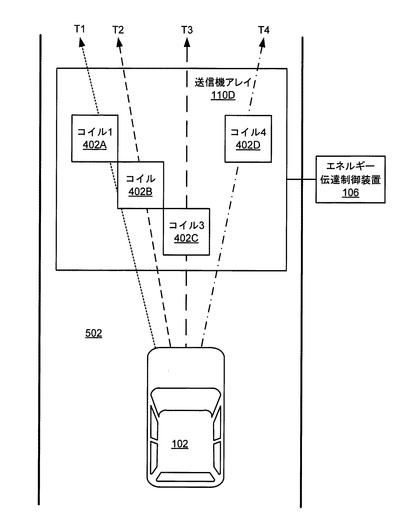
【図5A】本発明の一実施例による移動車両、送信機アレイ、および様々な軌道を示すブロック図である。
【図5B】本発明の第一の実施例による送信機アレイ、受信機アレイ、および様々な軌道を示すブロック図である。
【図5C】本発明の第一の実施例による送信機アレイ、受信機アレイ、および様々な軌道を示すブロック図である。
【図5D】本発明の第一の実施例による送信機アレイ、受信機アレイ、および様々な軌道を示すブロック図である。
【図6】本発明の一実施例による送信機アレイのコイルおよびその回路、ならびに受信機アレイの対応するコイルおよびその回路を示すブロック図である。
【図7】本発明の第二の実施例による送信機アレイのコイルおよびその回路、ならびに受信機アレイの対応するコイルおよびその回路を示すブロック図である。
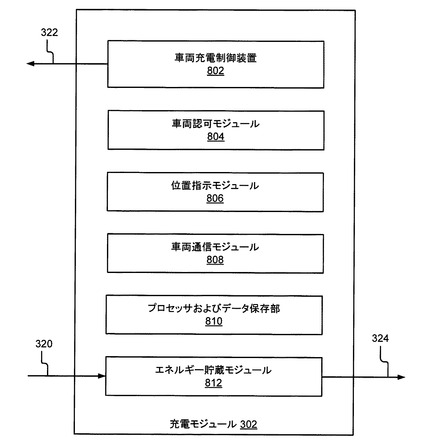
【図8】本発明の一実施例による移動車両の充電モジュールを示すブロック図である。
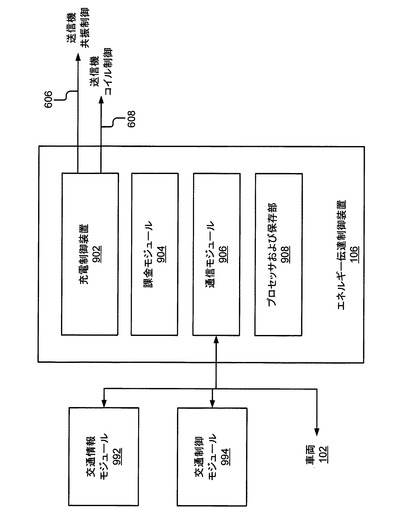
【図9】本発明の一実施例によるエネルギー伝達制御装置を示すブロック図である。
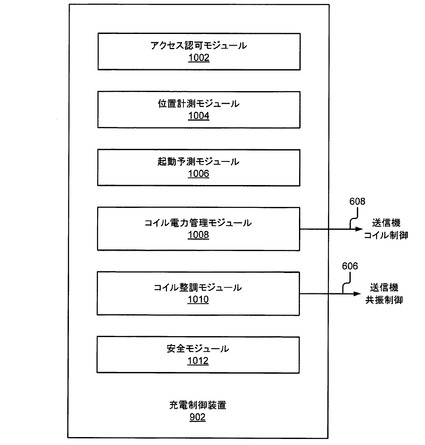
【図10】本発明の一実施例によるエネルギー伝達制御装置の充電制御装置を示すブロック図である。
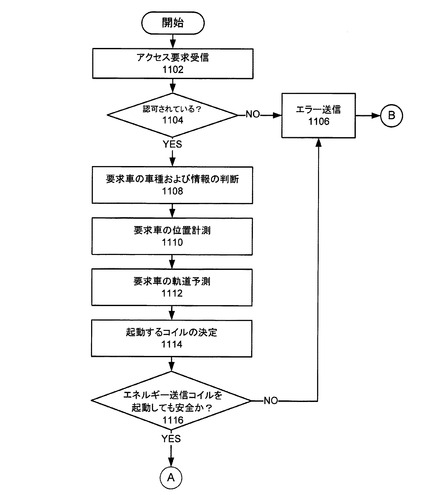
【図11A】本発明の一実施例によるエネルギー伝達方法を示すフローチャートである。
【図11B】本発明の一実施例によるエネルギー伝達方法を示すフローチャートである。
【発明を実施するための形態】
【0012】
図面は本発明の例を示すものであり、添付図面は本発明を限定するものではない。
【0013】
また本発明の様々な実施例を図示するが、これは例示のみを目的としたものである、図面において、可能な限り同様のあるいは類似の参照符号を用いて同様のあるいは類似の機能を示している。当業者には以下の説明から明らかなように、ここで説明する発明の原理から離れることなく、ここに図示した構造および方法とは別の実施形態をとることもできる。
【0014】
エネルギーを移動システム、特に車両に伝達するシステムおよび方法を開示する。エネルギー貯蔵ユニットを備える移動車両がエネルギー伝達領域に接近すると、エネルギー伝達制御装置は接近しつつある移動車両を検知し、移動車両の軌跡を計算する。移動車両がエネルギー伝達領域の送信機アレイを通過するとき、エネルギー伝達制御装置は移動車両に効率的にエネルギーを伝達するように自己校正を行う。移動車両は停車する必要はなく、また移動車両の運転者は移動車両をエネルギー伝達用差込口にプラグ接続する必要もない。移動車両へのエネルギー伝達は滞りなくシームレスかつ自動的に行われ、移動車両の運転者はいかなる操作も行う必要がない。
【0015】
以下においては、本発明を隅々まで理解できるように、説明を目的として多くの具体的構成の細部を述べるが、これらの具体的な細部を離れて本発明を実施することが可能であることは当業者には明らかである。また、曖昧さを避けるために構造や装置をブロック図形式で示している場合もある。
【0016】
本明細書において「一実施例」または「実施例」と言う場合、その実施例に関連して説明するある特定の特徴、構造または特性が本発明の少なくとも1つの実施例に含まれることを意味する。即ち、本明細書の随所に現れる「一実施例において」という文言は、必ずしも全てが同一の実施例を意味するものではない。
【0017】
また、その数量を明示せずに実施例中の要素や部品を記載するのは単に便宜上のことであり、かつまた発明の概括的な理解を与えることを意図したものであって、このような記載は、それらの要素や部品がそれぞれ1つ以上の場合、1つのみの場合、および複数の場合を含むものとする。但し、このような意図ではないことが明らかな場合はこの限りではない
【0018】
いくつかの実施例の説明において、「結合される(coupled)」および「接続される(connected)」という語がそれらの活用形・派生語を含めて用いられている。これらは互いに同義語として用いられているのではないことを理解されたい。例えば、実施例によっては、「接続(される)」という語が2つ以上の要素が互いに物理的または電気的に直接接触していること意味している。また別の例として、「結合(される)」という語が2つ以上の要素が互いに物理的または電気的に直接接触していることを意味している実施例もある。しかしながら、「結合(される)」は2つ以上の要素が互いに直接的には物理的また
は電気的に非接触でありながら、互いに協働あるいは相互作用していることを意味する場合もある。したがって、「結合(される)」という語は、「連結」「接続」「関連」「連係」「協調」「協働」の意味を含む場合もある。この点において実施例が限定されるものではない。
【0019】
また本明細書において、「〜からなる」「〜を含む」「〜を備える」「〜を有する」という語およびそれらの活用形は排他的な包含を意図したものではない。例えば列挙された一連の要素からなる工程、方法、物品、装置というのはそれらの要素のみを含むのではなく、明示的には挙げられていない他の要素、あるいはまたそれらの工程、方法、物品、装置が本来的に有する他の要素を含むこともできる。更に、そうではない旨の明示的記載がない限り、「または」という語は包含的な「または」であって、排他的な「または」ではない。例えば「条件AまたはB」は以下のいずれの場合にも満たされる、即ちAが真(存在)かつBが偽(非存在)の場合、Aが偽(非存在)かつBが真(存在)の場合、およびAとB共に真(存在)の場合。
【0020】
以下の詳細の説明は、コンピュータのメモリ内におけるデータビットの演算アルゴリズムや象徴的な表現を用いてなされた部分を含んでいる。これらのアルゴリズム的記載や表現は電気業界の当業者が他の当業者に技術の本質を最も効果的に伝える手段として用いられている。一般的にもそうであるように、ここでアルゴリズムとは所望の結果に至る一貫した一連のステップを意味する。ステップは物理量の物理的な変更または操作を必要とするものである。必ずではないが、たいていの場合これらの物理量は保存、送信、結合(combine)、比較およびその他の操作が可能な電気または磁気信号の形態である。主に広く用いられている用語法であるという理由により、これらの信号をビット(bits)、値(values)、要素(elements)、記号(symbols)、文字(characters)、項(言葉)、数字(numerals)などで言い表すのが便利な場合があるとされている。
【0021】
しかしこれらおよび類似の用語は適当な物理量と関連づけられるべきものであって、たんにこれら物理量の便宜上の呼び名に過ぎないことを理解されたい。以下の説明から明白なように、特段の別記がなければ、明細書の説明全体を通じて、「処理する」「演算する」「計算する」「判断する」「決定する」「計測する」「求める」「表示する」等で表現される動作は、コンピュータシステムまたはそれに類する電子計算機の動作やプロセスを表すものとする。このコンピュータシステムあるいは電子計算機はコンピュータシステムのレジスターおよびメモリ内の物理量(電気的な量)によって表現されるデータを操作し、同様にコンピュータシステムあるいは電子計算機はコンピュータシステムのメモリ、レジスターまたはその他の情報を格納、送信または表示する装置内の物理量によって表現される他のデータに変換するものである。
【0022】
本発明はまた、これら動作を行う装置に関する。この装置は所望の目的専用に構築された装置であってもよいし、コンピュータ内に保存されたコンピュータプログラムによって選択的に起動されたり再構成されたりする汎用コンピュータであってもよい。このようなコンピュータプログラムはコンピュータによって読み取り可能な記録媒体に記憶させてもよい。このコンピュータにより読み取り可能な記録媒体としては、それに限定されるものではないが、例えば磁気ディスク、光ディスク、CD−ROM、光磁気ディスクなどの任意のディスク、読み取り専用メモリ(ROM)、ランダムアクセスメモリ(RAM)、EPROM、EEPROM、磁気または光カード、または電子的指令を格納するのに適した任意の形態の媒体等があり、これらはいずれもコンピュータシステムのバスに結合される。
【0023】
本明細書で説明するアルゴリズムおよび表示は、なんらの特定のコンピュータその他の装置にも本来的に関連づけられるものではない。本明細書の記載に沿って、プログラムと
共にプロセッサ、メモリ、不揮発性記憶装置、入力装置、出力装置を含む種々の汎用演算システムを用いてもよいし、本発明の方法の要求するステップを実行するためにより特化した装置を構築するほうがよいということになる場合もあるかもしれない。これら様々なシステムに必要な構成は以下の説明によって明らかとなるであろう。また、特定のプログラミング言語を用いることなく本発明を説明するが、ここに説明する本発明の実施には様々なプログラミング言語を用いることができる。
【0024】
<エネルギー伝達システム100、200>
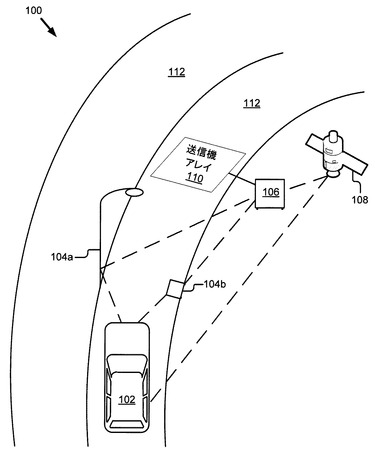
図1にエネルギー伝達システム100の第1の実施例を示す。エネルギー伝達システム100は移動車両102、1つ以上の位置センサ104a、104b、エネルギー伝達制御装置106、任意選択のGPSシステム(全地球測位システム)108および送信機アレイ110を含む。本実施例では本発明の原理に従って、エネルギー伝達システム100をカーブした道路112に設けている。エネルギー伝達システム100は移動車両102の速度が低下する場所に設けることが好ましい。特に、移動車両102の速度が低下するということは伝達時間が長いということであり、これは一つのコイル当たりの伝達エネルギーがより大きく、距離当たりに必要とされるコイルの数がより少ないことを意味する。
【0025】
移動車両102は電気エネルギーを必要とするものであればいかなる種類の車両であってもよい。移動車両102は例えばトヨタ自動車株式会社が製造・販売するプリウスのような種々のハイブリッド車両や完全電気車両に設けられる他の様々な電気的システム、機械的システム、通信システムを備えている。ここでは電気自動車およびハイブリッド自動車に関して本発明を説明するが、当業者には明らかであるように、本発明は他の移動式装置へのエネルギー伝達にも利用することができる。他の移動装置とは、例えば携帯電話機、可搬式の電子機器、ロボット車椅子、個人装着式移動装置(サイバーミュール:cyber mule)、セグウェイ(segway)のようなタイプの車両を含むが、これらに限定されるものではない。本発明において、移動車両102はまた、充電モジュール302、エネルギー貯蔵ユニット304、および受信機アレイ306(図3も参照)を備える。移動車両102の詳細については、図3および図8を参照して後述する。充電モジュール302は移動車両102の位置および方向を判断し、その情報を他の装置に伝達することができる。受信機アレイ306は移動車両102のエネルギー貯蔵ユニット304に貯蔵するエネルギーを送信する送信機アレイ110と結合可能である。充電モジュール302は位置センサ104a、104b、エネルギー伝達制御装置106、およびGPSシステム108と通信可能に構成されている。
【0026】
1つまたは複数の位置センサ104a、104bは道路112近傍に配置されている。図示のように、位置センサは参照符号104aで示すように照明灯のような路傍の機器と一体化して設けてもよく、あるいは参照符号104bで示すように独立した単独の装置としてもよい。図1に破線で示すように、位置センサ104a、104bは有線あるいは無線でエネルギー伝達制御装置106に結合される。一実施例において、位置センサ104a、104bは移動車両と通信するように構成されかつ移動車両102と結合して、速度、ディレクトリ(directory)、および軌道(trajectory)情報を受信するのみであり、それをエネルギー伝達制御装置106に送信する。別の実施例では位置センサ104a、104bは独自に移動車両102の速度、ディレクトリ、軌道を計測し、それをエネルギー伝達制御装置106に送信する。
【0027】
エネルギー伝達制御装置106は移動車両102、位置センサ104a、104b、GPSシステム108,および送信機アレイ110と結合して通信を行う。エネルギー伝達制御装置106は送信機アレイ110に電力を供給する。エネルギー伝達制御装置106は送信機アレイ110内の特定のコイルの起動および共振パラメータの制御を行う。エネルギー伝達制御装置106は移動車両102の軌道および速度を計算し、送信機アレイ1
10内のどのコイルを起動するか、およびそれらコイルをいつ起動するかを決定する。また、エネルギー伝達制御装置106は送信機アレイ110のコイルの共振パラメータを制御して、エネルギー伝達を最大化する。エネルギー伝達制御装置106は位置、方向、速度、車両タイプ、受信機アレイ306のコイルのパラメータ等の情報を用いて、送信機アレイ110の起動時期と共振パラメータとを決定する。エネルギー伝達制御装置106について、図9および図10を用いてより詳細に後述する。
【0028】
GPSシステム108は従来型のものであり、図1では衛星によって示される。GPSシステム108は複数の衛星に設けた送信機と、衛星信号を受信して衛星信号から受信機の位置を三角法によって計測する受信機とを含む。GPSシステム108は移動車両102およびエネルギー伝達制御装置106と通信し、位置情報を提供するように構成されている。
【0029】
送信機アレイ110は複数のコイル(図4乃至図7参照)を備える。送信機アレイ110はエネルギー伝達制御装置106と結合して電力の供給を受ける。送信機アレイ110はまたエネルギー伝達制御装置106から受信する信号によって制御される。送信機アレイ110のさらなる詳細について、図4乃至図7を用いて後述する。
【0030】
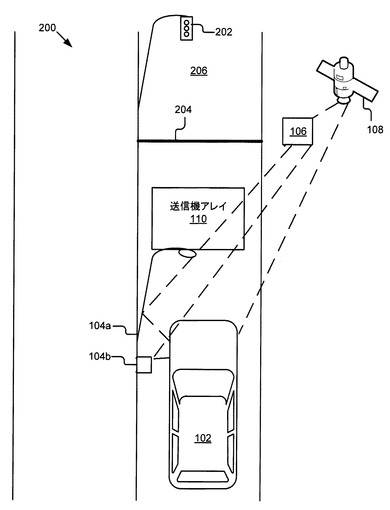
図2にエネルギー伝達システム200の第2の実施例を示す。エネルギー伝達システム200のこの実施例は、移動車両102、1つ以上の位置センサ104a、104b、エネルギー伝達制御装置106,任意選択のGPSシステム108、および送信機アレイ110を含む。このシステム200において前述のシステム100と同一あるいは同様の機能を有する要素は同様の参照符号を用いて示している。
【0031】
この実施例では、本発明の原理に従って、エネルギー伝達システム200を信号機202の直前に配置している。信号機202に対応する停止線204は信号機202を通過する車両が停止すべき位置を示している。本発明に従って、送信機アレイ110は道路206内の表面下に停止線204から所定の距離で配置されている。例えば送信機アレイ110を停止線204の前方10フィートから50フィート(約3メートルから約15メートル)の距離に配置する。これにより移動車両102が送信機アレイ110を通過する際に確実に減速されるようになる。図2では位置センサ104a、104bの位置も異なっている。図1における位置とは異なり、位置センサ104a、104bは道路106の同じ側に、道路に沿って間隔を置いて位置している。送信機アレイ110を信号機の手前として説明したが、当業者には明らかなように、移動車両102が比較的低下する場所は例えば出・入ランプ内のように他にも様々あり、送信機アレイ110をそのような場所に設けてもよい。
【0032】
<移動車両102>
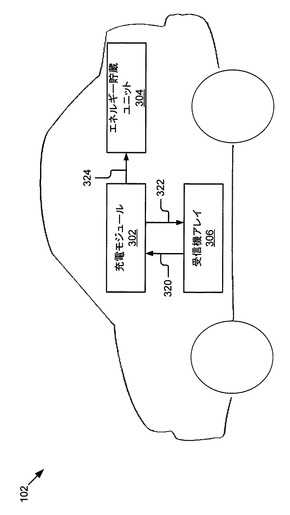
図3に移動車両102の一実施例を示す。上に説明したように、移動車両102は充電モジュール302、エネルギー貯蔵ユニット304、および受信機アレイ306を有する。一実施例において、移動車両102は従来型の完全電動車またはハイブリッド車に本発明の充電モジュール302、エネルギー貯蔵ユニット304、および受信機アレイ306を付加したものである。
【0033】
充電モジュール302は受信機アレイ306の動作を制御し、受信機アレイ306に発生されるエネルギーをエネルギー貯蔵ユニット304に移送する。充電モジュール302はエネルギー伝達制御装置106に情報を伝え、エネルギー伝達制御装置106が送信機アレイ110から受信機アレイ306に伝達されるエネルギー量を最適化かつ最大化できるようにする。充電モジュール302の一実施例は、図8を参照しつつ後ほど説明する。充電モジュール302は信号線320によって受信機アレイ306と結合され、受信機ア
レイ306の発生するエネルギーを受け取る。また、充電モジュール302は信号線322によって受信機アレイ306と結合され、受信機アレイ306に制御信号、特に受信機アレイ306のコイルに1つ以上の共振パラメータを指定する信号を送る。また、充電モジュール302は信号線324によってエネルギー貯蔵ユニット304に結合され、エネルギー貯蔵ユニット304にエネルギーを送る。
【0034】
エネルギー貯蔵ユニット304は従来型のものであり、一実施例においては充電池群とそれに関連する電子装置である。別の実施例では、エネルギー貯蔵ユニット304は完全電気車やハイブリッド車に用いられる既存の充電池とそれに関連する電子装置である。エネルギー貯蔵装置304は信号線324によって充電モジュール302と結合され、受信機アレイ306の発生するエネルギーを受け取る。別の実施例(不図示)においては、エネルギー貯蔵ユニット304は受信機アレイ306と直接結合されて、発生されたエネルギーを受け取る。
【0035】
受信機アレイ306は複数のコイルである。受信機アレイ306は、図5を参照して後ほどより詳細に説明する。受信機アレイ306は電力伝達を最適化するように整調可能な複数のコイルを含む。一実施例において、受信機アレイ306コイルの共振特性を送信機アレイ100の対応するコイルの共振特性と同調するように整調する。以下において、受信機アレイ306のコイルの実施例を図6および7を参照してより詳細に説明する。受信機アレイ306は信号線320によって充電モジュール302と結合され、充電モジュール302にエネルギーを与え、また信号線322によって充電モジュール302から制御信号を受信する。
【0036】
<送信機アレイ110>
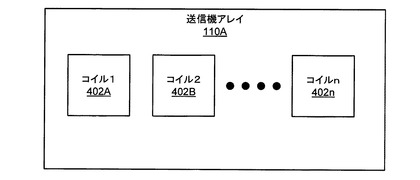
図4A〜5Dを参照して、送信機アレイ110の様々な実施例を説明する。当業者には明らかであろうように、このほかにも送信機アレイ110の様々な構成があり、ここに示すものは単なる例示にすぎない。しかしながら、送信機アレイ110は以下の共通の性質を有している、即ち(1)複数のコイルを有し、(2)これらコイルは道路を横切って異なる横方向位置を有し、(3)各コイルは整調可能である。
【0037】
図4Aに、送信機アレイ110Aの第1の実施例を示す。図4Aは送信機アレイ110Aのごく基本的な実施例を示す上平面図である。送信機アレイは複数のコイル402A〜402nを含む。コイル402A〜402nは送信機アレイ110Aの横方向軸に沿って離間している。この実施例の送信機アレイ110Aは、道路112、206の幅よりわずかに小さい好適な大きさとしている。このため、道路112、206上における移動車両102の位置にかかわらず、少なくとも1つのコイル402A〜402nが受信機アレイ306の対応するコイル(不図示)と整列する。図示してはいないが、各コイル402A〜402nはエネルギー伝達制御装置106と結合されており、コイル402A〜402nを整調するための信号を受信する。更に、一実施例において、コイル402A〜402nは受信機コイルと一致する大きさとする。例えば、効率的に動作させるには、コイル402A〜402nの幅と長さを最小の30インチ×30インチ(約76センチメートル)、コイルの巻線高を2インチ(約5センチメートル)とし、また道路内に配置したコイルと移動車両102内の受信機アレイ306との間隔を6乃至18インチ(約15乃至45センチメートル)とする。送信機コイルの配置は受信機コイルを通過する磁束密度を最大化するように最適な設計とする。送信機コイルと受信機コイルの軸を道路面に垂直にすることで、高強度の磁束密度が受信コイルに与えられる。この配置により、少なくとも1つのコイルが同等の大きさを有し、最大の結合係数kと最大のエネルギー伝達効率をもたらすように正確に整列されることが保証される。この実施例では、移動車両102が送信機アレイ110A上を通過する際に、受信機コイルと整列する一つまたは少数のみのコイル402A〜402nのみを起動する。これはエネルギー伝達を最大化しつつエネルギーを
節約できるという点で特に有利である。
【0038】
図4Bに、送信機アレイ110Bの第2の実施例を示す。図4Bは送信機アレイ110Bの上平面図である。この第2実施例の送信機アレイ110Bもまた、複数のコイル402A〜402nを含んでおり、かつ送信機アレイ110Bは道路112、206の幅よりわずかに小さい好適な大きさとしている。コイル402A〜402nは送信機アレイ110Bの横方向軸に沿って離間していると共に、送信機アレイ110Bの縦方向軸に沿っても離間しており、送信機アレイ110Bの一つの角部から他の角部まで対角線上に位置している。送信機アレイ110Bのこの構成は、移動車両102の動きや送信機アレイ110Bの個々のコイル402A〜402nの起動タイミングに関してより柔軟性を有する点で有利である。本実施例は配置の柔軟性と送信機アレイ110Bのコストとのバランスが取れている。
【0039】
図4Cに送信機アレイ110Cの第3の実施例を示す。図4Cは送信機アレイ110Cの上平面図である。この第3実施例の送信機アレイ110Cもまた、複数のコイル402A〜402n*mを含んでおり、かつ送信機アレイ110Cは道路112、206の幅よりわずかに小さい好適な大きさとしている。本実施例においては、n×mのコイル402A〜402n*mを格子状に配置している。本実施例では、移動車両102が送信機アレイ110Cを通過する際に複数のコイル402A〜402n*mを縦に順次起動してより多くの電力を伝達できるので有利である。例えばコイル402b、402n+2、4022n+2を順番に起動して個々のコイルが受信機アレイ306の受信機コイルにエネルギーを伝達することができる。この例ではこれらコイルが送信機アレイ110Cの縦方向軸に沿って整列しているものとしているが、送信機アレイ110C上での移動車両102の軌道に対応して、送信機アレイ110Cの異なる列のコイルを起動することもできる。本実施例において、各コイルは受信機アレイ306の受信機コイルの共振に同調するように整調可能である。
【0040】
図5Aに送信機アレイ110Dの第4の実施例を示す。図5Aは送信機アレイ110D、道路502および道路502を通過する移動車両102を示す上平面図である。この第3実施例の送信機アレイ110Dもまた、複数のコイル402A〜402Dを含んでおり、かつ送信機アレイ110Dは道路112、206、502の幅よりごくわずかに小さくなる好適な大きさとしている。本実施例では、4つのコイル402A−402Dを独自のパターンで配置して道路502の幅をカバーしている。図5Aは移動車両102が送信機アレイ110D上を通過する際に通る可能性のある4つの軌道T1、T2、T3、T4を示している。図5Aに示すように、移動車両102の軌道によっては、1つのコイルのみが起動されて受信機アレイ306(不図示)にエネルギーを伝達する。例えば移動車両102が軌道T1をとった場合、コイル1(402A)が適宜の時期に起動されて受信機アレイ306にエネルギーを伝達する。同様に移動車両102が軌道T2をとった場合、コイル2(402B)が適宜の時期に起動されて受信機アレイ306にエネルギーを伝達する。同様に、移動車両102が軌道T3および軌道T4をとった場合に、それぞれコイル3(402C)、コイル4(402D)が起動される。図5Aは更に、エネルギー伝達制御装置106が送信機アレイ110Dに結合されてコイル402A〜402Dに共振パラメータを与えることを示している。
【0041】
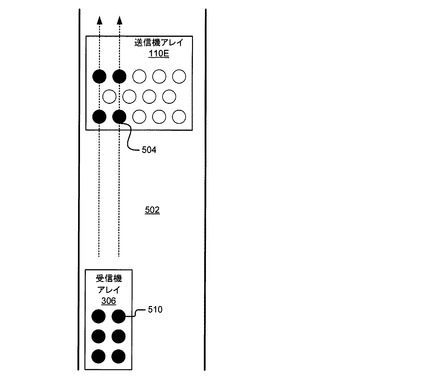
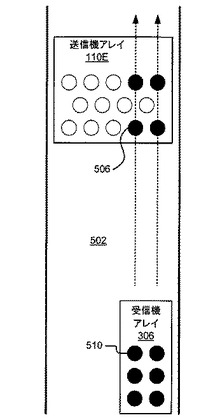
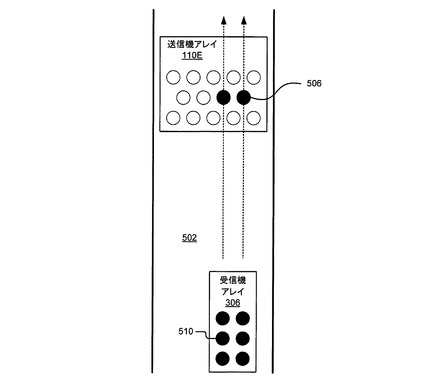
図5B〜5Dに送信機アレイ110Eの更に別の実施例を示す。図5B〜5Dは送信機アレイ110E、道路502および道路502を通過する移動車両(不図示)の受信機アレイ306を示す上平面図である。図5B〜5Dでは特に破線によって移動車両102の受信機アレイ306が送信機アレイ110E上を通過する際の軌道を示している。本実施例において、送信機アレイ110Eは複数のコイル列を含む。3列のコイルのみを図示しているが、当業者はこのパターンを連ねて任意の列数のコイルを含むようにするやり方を
理解できるであろう。奇数番の列(第1および第3列)は縦方向に他の奇数番の列と整列している。同様に偶数番の列は他の偶数番の列と整列するようにすることができる。偶数番の列は縦方向に見て奇数番の列のコイルとは位置を若干ずらしている。これによって少なくとも1つのコイルが確実に受信機アレイ306のコイルと正確に整列するので有利である。
【0042】
図5Bでは、受信機アレイ306は(従って移動車両102は)道路502の左側に位置する。従って、受信機アレイ306が送信機アレイ110E上を通過する際に、受信機アレイ306のコイル510は送信機アレイ110Eのコイル504と整列する。受信機アレイ306は2×3のアレイに配列された6つのコイルを含む。しかし当業者には明らかなように、受信機アレイ306は車両の前部から後部に配列された複数の受信機コイルの任意の大きさのアレイ構成とすることができ、一次元的な配列であってもよい。受信機アレイ306が送信機アレイ110E上を通過する際に、エネルギー伝達制御装置106は送信機アレイ110Eのこれら4つのコイル504を選択的に起動する。更に以下において図6および7を参照して説明するように、コイル504とコイル510の共振を互いに同調させて最大限のエネルギー伝達を与えるように整調する。
【0043】
図5Cでは、受信機アレイ306は道路502の右側に位置する。この場合、受信機アレイ306が送信機アレイ110E上を通過する際に受信機アレイ306のコイル510は送信機アレイ110Eのコイル506と整列する。受信機アレイ306が送信機アレイ110E上を通過する際に、エネルギー伝達制御装置106は送信機アレイ110Eのこれら4つのコイル506を選択的に起動する。
【0044】
図5Dでは、受信機アレイ306は道路502のやや右側に位置している。この場合、受信機アレイ306が送信機アレイ110E上を通過する際に受信機アレイ306のコイル510は送信機アレイ110Eのコイル508と整列する。受信機アレイ306が送信機アレイ110E上を通過する際に、エネルギー伝達制御装置106は送信機アレイ110Eのこれら2つのコイル506を選択的に起動する。
【0045】
図5B〜5Dに示した例示のための実施例から、縦横に配列した複数のコイルを用いることにより、より大きなエネルギーを伝達することができ、かつ最も近く整列したコイルを選択的に起動することによりエネルギーを節約することができることが当業者には理解されるであろう。
【0046】
一実施例において、コイルアレイは太いゲージ#00の銅線の4回巻きで30インチ×30インチ(約76センチメートル)の大きさである。例としては、コイルの幅と長さはコイル間隔の少なくとも5倍である。コイル間の間隔が小さくてもよい場合には、コイルの幅と長さを小さくする。コイルおよびその間隔が小さければ、送信機アレイ110および受信機アレイ306を1次元的にも2次元的にも配列することができる。別の実施例ではコイル線として超伝導線を用いてコイル損失を低減するが、超伝導体の臨界電流を越えてはならず、越えた場合には効率性が失われる。臨界電流が低いと超伝導線の許容入力が制限される。更に、各コイルの周波数は等しくし、また個々の送信機コイルの位相を外部磁場が加算的(additive)となるように制御する。近くのコイル線には同一方向の電流が流れるようにしなければならない(即ちコイル毎に反対の電流方向極性とする)。
【0047】
別の実施例では、送信機アレイ110のコイル402の大きさは受信機アレイ306のコイル510の約2倍である。例えば、送信機アレイ110のコイル402の大きさを2メートル×2メートルとし、受信機アレイ306のコイル510の大きさを1メートル×1メートルとする。この場合、道路側コイル402が2倍大きいことにより、エネルギー伝達時間が長くなりかつ操舵における許容条件が緩和されるので特に有利である。
【0048】
<共振制御>
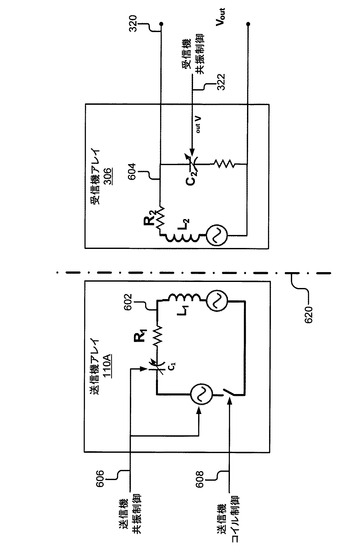
図6を参照して、本発明の一実施例による送信機アレイ110のコイルL1と受信機アレイ306の対応するコイルL2について説明する。図6は理解を容易にするために送信機アレイ110の1つのコイルL1と受信機アレイ306の対応するコイルL2のみを図示しているが、当業者は理解するであろうように、送信機アレイ110および受信機アレイ306はいくつかのコイルを有し、そのうちの1つ以上のコイルがある時に充電関係となる。送信機アレイ110内の各コイルL1は、エネルギー伝達制御装置106から信号線608を介して個別の送信コイル制御信号を受信し、信号線606を介して送信共振制御信号を受信する。これにより、エネルギー伝達制御装置106は要求通りにコイルL1を選択的にオン・オフし、かつ対応する受信機コイルL2へのエネルギー伝達を最大化するのに必要とされるコイルL1の整調を行うことが可能となる。同様に、受信機アレイ306内の各コイルL2は信号線322を介して個別の受信共振制御信号を充電モジュール302から受信する。本発明では、このようにして送信機アレイ110および受信機アレイ306の双方を様々な条件においてエネルギー伝達を最適化するように整調可能である。
【0049】
図6に示すように、コイルL1はそれに関連する回路602を有しており、該回路602は可変キャパシタC1、抵抗R1および可変周波数電源610を含む。本発明の利点として、共振パラメータ、周波数およびキャパシタンスを調節しており、それによりコイルL1とコイルL2間の共振コイル結合によってエネルギー伝達を最適化する。更に、信号線608の送信機コイル制御信号がスイッチを制御し、受信機アレイ306が送信機アレイ110上を通過しているときにのみコイルが起動されるようにする。受信機アレイ306および送信機アレイ110はある間隔で隔てられており、一点鎖線620は道路面を示している。コイルL2はそれに関連する回路604を有しており、該回路604は可変キャパシタC2および抵抗R2を含む。上記と同様に、この関連する回路604は信号線322を介して受信機共振制御信号を受信するように結合されている。この信号はC2のキャパシタンスを変化させ、受信機アレイ306を送信機アレイ110と同調するように整調する。本発明は間隔の大きさ、電源610の周波数、受信機アレイ306と送信機アレイ110が共振結合している時間の長さ、およびキャパシタンスの値を好適に利用してエネルギー伝達を最適化する。これらの要素に基づいて、エネルギー伝達制御装置106および充電モジュール302は送信機コイル制御信号、送信機共振制御信号、および受信機共振制御信号を生成し、送信機コイルL1に対する移動車両位置に応じて変化するk値にかかわらず、C1およびC2の正確な値を与える。一次および二次コイル回路602、604内に共振キャパシタ(上記のキャパシタ)を設けて、一次および二次の寄生インダクタンスによって生ずるインピーダンスの補正を提供することによって、伝達効率を向上させる。エネルギー伝達中にキャパシタC1およびC2の値を変化させることにより、伝達中の共振現象を最適化し、かつ伝達の平均効率を高める。この構成は共振コイルシステムのパラメータおよび励起される個々の特定コイルの通過時間の動的な変動を許容する。より詳細には、共振キャパシタンスの値は伝達インターバル中(伝達の合間)に変化させる。受信回路の実効負荷抵抗Vload/Iloadもまた伝達インターバル中に変化させる。伝達インターバルが生じる位置とその持続時間は充電コイル上での移動車両102の軌道に応じて変化する。
【0050】
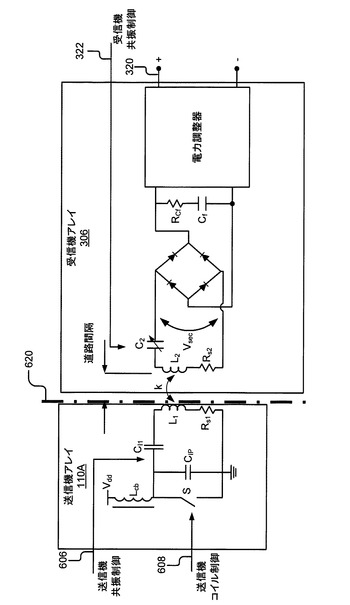
ここで図7に送信機アレイ110のコイルL1とそれに対応する受信機アレイ306のコイルL2、およびそれらに関連する回路の第2の実施例を示す。この実施例では送信機アレイ110は電源Vddおよび追加のインダクタLcbを備えている。受信機アレイ306は図示のように結合されたブリッジ整流器と電力調整器を備えている。
【0051】
<充電モジュール302>
図8を参照して充電モジュール302の一実施例を説明する。充電モジュール302は車両充電制御装置802、車両認可モジュール804、位置指示モジュール806、車両通信モジュール808、プロセッサおよびデータ保存部810、およびエネルギー貯蔵モジュール812からなる。
【0052】
車両充電制御装置802は情報を受信し、信号線322を介して受信機アレイ306に出力される制御信号を発生する。車両充電制御装置802は特に受信機共振制御信号を発生する。この信号はコイルL2の1つ以上の動作パラメータを制御する。一実施例において、車両充電制御装置802は信号線322に結合された出力と、車両通信モジュール808並びにプロセッサおよびデータ保存部810から情報を受信するように結合された入力と、を有するハードウエア制御装置である。別の実施例においては、車両充電制御装置802はプロセッサおよびデータ保存部810によって実行可能なソフトウエアであって、該ソフトウエアによりプロセッサが受信機共振制御信号を出力する。車両充電制御装置802は、送信機アレイ110から受信機アレイ306へのエネルギー伝達を最大化するように受信機コイルL2の共振パラメータを調節できるようにするために、送信機アレイ110の動作パラメータ等の情報を受信する。回路の共振パラメータは回路のキャパシタンス、およびインダクタまたは動作周波数を変えてもよい。キャパシタンス値の可変は、数個の低損失で固定値のポリプロピレン・キャパシタ(コンデンサ)、ポリスチレン・キャパシタまたはマイカキャパシタに直列接続した複数の電子制御式半導体スイッチを用いて実現してもよい。キャパシタの切り替えはそれらの電圧がゼロに近いとき行うと最も効率的である。
【0053】
車両認可モジュール804はプロセッサ810によって実行可能なソフトウエアまたはルーチンであり、認可情報を与える。一実施例において、エネルギー伝達システム100は個々のユーザに有料で提供される。エネルギー伝達システム100の利用に先立って各ユーザはアカウントを設定し、該アカウントの設定後に、ユーザに認可情報が与えられる。その後、移動車両102はこの認可情報を所与の送信機アレイ110およびエネルギー伝達制御装置106へのエネルギー伝達要求と共に送信することができる。図示してはいないが、システム100は任意の数のエネルギー伝達制御装置106とネットワーク(不図示)によって結合されたサーバー(不図示)を含んでもよいことが当業者には明らかである。このサーバーを用いて、システムの使用を検知し、ユーザに対して使用料を課金し、その他のシステムおよび使用情報を収集する。車両認可モジュール804は特定のユーザ車両に固有の認可情報を記憶するために用いる。車両認可モジュール804は車両通信モジュール808と結合され、認可情報をエネルギー伝達制御装置106に送信する。
【0054】
位置指示モジュール806は移動車両102の位置を計測する装置である。一実施例において、位置指示モジュール806は衛星からの位置信号に基づいて移動車両102の位置を三角法により計測することのできるGPS受信機である。別の実施例においては、位置指示モジュール806は複数のセルタワー(cell towers)からの信号を利用して三角法で位置を計測する。位置指示モジュール806はまた、移動車両102の位置を車両通信モジュール808に出力する。かくして、移動車両102の位置は車両通信モジュール808によってエネルギー伝達制御装置106または位置センサ104に送信される。
【0055】
車両通信モジュール808は他の車両、エネルギー伝達制御装置106およびその他の静止体または移動体との通信を行う通信装置である。一実施例において、車両通信モジュール808はデータパケットをTCP/IP形式で送信するように構成したWI−FI送受信機である。他の実施例において、車両通信モジュール808は衛星送受信機、移動体通信送受信機、または赤外線送受信機である。車両通信モジュール808はエネルギー伝達制御装置106との通信を確立し、エネルギー伝達プロセスに関する情報を送信することができる。車両通信モジュール808は車両充電制御装置802、車両認可モジュール
804、位置指示モジュール806、並びにプロセッサおよびデータ保存部810と結合される。
【0056】
プロセッサおよびデータ保存部810は従来型のものであり、後ほど図11Aおよび11Bを参照して説明する送信機アレイ110と受信機アレイ306の間でのエネルギー伝達に関連する多くの動作を実行する。一実施例において、データ保存部810は車種や受信機アレイ306との距離等に関する情報を保持している。実施例によっては、プロセッサおよびデータ保存部810がモジュール802,804、806および808の機能を果たす。プロセッサおよびデータ保存部810を用いて、車両充電制御装置802に送られ当該装置802によって出力される共振パラメータの決定を行ってもよい。
【0057】
エネルギー貯蔵モジュール812は入力および出力を有し、発生されたエネルギーを受信機アレイ306からエネルギー貯蔵ユニット304に送るように構成されている。エネルギー貯蔵モジュール812は信号線320と結合されて受信機アレイ306に発生されたエネルギーを受け取る入力を有する。一実施例において、エネルギー貯蔵モジュール812は電力調整装置を備え、受け取った電力をすべて信号線324を介してエネルギー貯蔵ユニット304に出力する。
【0058】
<エネルギー伝達制御装置106>
ここで図9を参照してエネルギー伝達制御装置106の一実施例を説明する。エネルギー伝達制御装置106は充電制御装置902、課金モジュール904、通信モジュール906、並びにプロセッサおよび保存部908からなる。エネルギー伝達制御装置106はまた、交通情報モジュール992、交通制御モジュール994,および移動車両102から情報を受信するように結合される。
【0059】
充電制御装置902は送信機アレイ110の選択されたコイルを起動し、該選択されたコイルに対する共振パラメータを設定する。充電制御装置902の一実施例は、図10を参照して後ほどより詳細に説明する。図9に示すように、充電制御装置902は信号線606に結合される出力を有し、送信機共振制御信号を供給する。この信号は送信機アレイ110のコイル共振特性を調整するパラメータを与える。充電制御装置902はまた信号線608に結合される出力を有し、送信機コイル制御信号を供給する。この信号は送信機アレイ110のどの特定のコイルをいつオン・オフするかを制御する。充電制御装置902は通信モジュール906、課金モジュール904、並びにプロセッサおよび保存部908から情報を受信するように結合される。これらのモジュール904、906および908は、特定のコイルをいつ起動するか、どのコイルを起動するか、およびコイルの起動時に用いられる共振パラメータ、を決定するために用いる種々の異なる入力を供給する。
【0060】
課金モジュール904はプロセッサ908によって実行可能なソフトウエアまたはルーチンである。課金モジュール904は通信モジュール906から認可情報を受信するように結合される。課金モジュール904は認可情報を受信し、それに応答して充電制御装置902に信号を送信し、特定の車両102に対して送信機アレイ110の起動が許可されていることを示す。課金モジュール904は充電制御装置902とも通信して、移動装置102に伝達されたエネルギー量を求め、その情報を保持する。一実施例において、課金モジュール904は課金データベース(不図示)を備え、該データベースから、過去に特定の車両102に伝達されたエネルギーの量に応じた課金(料金請求)を行うことができる。上記のように、課金モジュール904は、料金請求を発行しそれを認可情報に対応する特定のユーザに送るサーバーと結合される。別の実施例においては、ユーザがクレジットカード番号または銀行口座その他の料金請求情報を登録しておき、そうした料金請求情報を利用してエネルギー伝達の料金を自動的に請求して引き落とす。課金モジュール90
4は通信モジュール906と結合され、料金請求およびその他の手続きのためにサードパーティの財務システムとやり取りする。
【0061】
通信モジュール906は上記の車両通信モジュール808と同様の通信装置である。エネルギー伝達制御装置106は通信モジュール906によって移動車両102、交通情報モジュール992、交通制御モジュール994、およびその他のコンピュータシステム(不図示)と通信することができる。一実施例において、通信モジュール906はデータパケットをTCP/IP形式で送信するように構成したWI−FI送受信機である。他の実施例において、通信モジュール906は衛星送受信機、移動体通信送受信機、または赤外線送受信機である。通信モジュール906はまた、充電制御装置902、課金モジュール904、並びにプロセッサおよび保存部908に情報を供給するように結合される。
【0062】
プロセッサおよび保存部908は従来型のものであり、エネルギー伝達制御装置106の動作を実行するために用いられる。図11Aおよび図11Bを参照することにより、プロセッサおよび保存部908の動作がよりよく理解できる。プロセッサおよび保存部908は通信モジュール906、課金モジュール904、および充電制御装置902と結合される。プロセッサおよび保存部908は本発明の諸ルーチンを実行し、また保存部908はこれら他の要素が利用する情報を保持する。
【0063】
交通情報モジュール992は道路交通状況についての情報を提供する別のシステムである。交通情報モジュール992はエネルギー伝達制御装置106付近の交通状況に加えて交通状況全般に関する情報を提供する。例えばリアルタイム交通情報モジュール992は米国で提供されている「511.org」の如きデータシステムで公に入手できるデータと類似のデータを提供する。交通情報モジュール992は通常の交通量および速度と渋滞の速度や原因等の情報、並びに移動車両102がエネルギー伝達制御装置106を通過する際の速度に影響するようなその他の情報を提供する。プロセッサおよび保存部908はこの情報を利用して送信機アレイ110をいつ起動し、いつ停止するかについてのよりよい情報を提供する。交通情報モジュール992はエネルギー伝達制御装置106の通信モジュール906と通信するように構成される。
【0064】
交通制御モジュール994は特定の交通制御機構についての情報を提供する別のシステムである。図2を参照して前に説明した例を用いると、交通制御モジュール994は信号機202の状態についての情報をエネルギー伝達制御装置106に送信する。充電制御装置902はこの情報を用いて、送信機アレイ110の具体的な起動時期および停止時期を決定する。例えば、交通制御モジュール994は、信号機202が青から赤に変わろうとするときに、エネルギー伝達制御装置106に信号を送る。移動車両102が信号機202で減速するであろうことを認識することにより、充電制御装置902は今後の交通状況に応じて起動/停止時期および共振パラメータを修正することができる。交通制御モジュール994は、エネルギー伝達制御装置106の通信モジュール906を介して、充電制御装置902と通信するように構成される。
【0065】
ここで図10を参照して、エネルギー伝達制御装置106の充電制御装置902をより詳細に説明する。充電制御装置902は、アクセス認可モジュール1002、位置計測モジュール1004、軌道予測モジュール1006、コイル電力管理モジュール1008、コイル整調モジュール1010、および安全モジュール1012からなる。
【0066】
アクセス認可モジュール1002は移動車両102に結合され、認可情報を受信する。アクセス認可モジュール1002はコイル電力管理モジュール1008とも結合され、コイル電力管理モジュール1008による送信機アレイ110への電力供給を許容する認可信号を供給する。一実施例において、アクセス認可モジュール1002はプロセッサ90
8によって実行されるソフトウエアまたはルーチンである。認可モジュール1002は認可された諸ユーザのデータベースを有しているか、あるいは上記のようなサーバーおよびネットワークに結合され、受信した認可情報を確認する。
【0067】
位置計測モジュール1004は通信モジュール906によって位置センサ104A、104Bおよび移動車両102と結合される。位置計測モジュール1004は移動車両102の位置の計算に利用することのできる情報を受信する。一実施例において、位置計測モジュール1004は移動装置102からリアルタイム情報を受信し、該情報が位置センサ104A、104Bによって確認される。一実施例において、位置計測モジュール1004は移動車両102の位置値を生成し、それらを軌道予測モジュール1006に出力する。
【0068】
軌道予測モジュール1006は位置計測モジュール1004と結合される。軌道予測モジュール1006は移動車両102の位置情報を位置計測モジュール1004から受信する。軌道予測モジュール1006は、移動車両102の位置情報を用いて、移動車両102の今後の道筋を予測する。特に、図5を参照して説明したように、軌道予測モジュール1006は移動車両102が送信機アレイ110Dのどのコイル402の上を通過するか、および受信機アレイ306が送信機アレイ110Dと共振結合するであろう正確な時刻、を予測する。軌道予測モジュール1006はコイル電力管理モジュール1008に結合された出力を有し、どのコイル402をいつ起動するかについての情報を提供する。
【0069】
このコイル電力管理モジュール1008は軌道予測モジュール1006に結合され、タイミング情報を受信する。コイル電力管理モジュール1008は、コイル402をいつ起動するか、またどのコイル402を起動するか、を制御する。コイル電力管理モジュール1008は送信機コイル制御信号を発生し、それを信号線608を介して送信機アレイ110に出力する。信号線608は1つのみを図示しているが、当業者にはわかるように、コイル電力管理モジュール1008は所与の時点で起動すべき送信機アレイ110の1つ以上のコイル402に信号を供給することができる。
【0070】
コイル整調モジュール1010は通信モジュール906並びにプロセッサおよび保存部908と結合され、移動車両102およびその受信機アレイ306についての情報を受信する。前述のように、送信機アレイ110のコイル402は受信機アレイ306のコイルへのエネルギー伝達を最適化するように整調される。コイル整調モジュール1010は信号線606を介して、送信機アレイ110の個別のコイル402に送られる制御信号を出力する。一実施例において、コイル整調モジュール1010は、場の強度とコイル402が共振する周波数とを変更する。例えば、送信機アレイ110のコイル402を動作させる周波数を10MHzとすることができる。別の一実施例においては、コイル整調モジュール1010は、一次および二次の共振キャパシタのリアクタンスがコイル402、510の寄生インダクタンスを打ち消すように、固有の回路伝達パラメータを調整する。更に別の一実施例においては、コイル整調モジュール1010は送信機回路602および受信機回路604の周波数とキャパシタンスを調節してエネルギー伝達を最適化し、かつ車種および送信機アレイ110のコイルL1と受信機アレイ306のコイルL2との間の推定間隔に基づいて回路602、604を調節する。
【0071】
安全モジュール1012は軌道予測モジュール1006および送信機アレイ110近傍における人間その他の対象物の存在を検知する他のセンサ(不図示)から情報を受信するように結合される。安全モジュール1012はこれらの入力に基づいて、送信機アレイ110の起動によって損傷を受ける可能性のあるものが送信機アレイ110の近傍にあるか否かを判断する。もしあれば、安全モジュール1012は制御信号を出力して、コイル電力管理モジュール1008が送信機アレイ110のコイル402を起動しないようにする
。安全モジュール1012の出力はコイル電力管理モジュール1008に結合される。
【0072】
<方法>
ここで図11Aおよび図11Bを参照して、本発明の一実施例によるエネルギー伝達方法を説明する。エネルギー伝達制御装置106が移動車両102からアクセス要求を受信する(ステップ1102)ことにより、プロセスが開始される。一実施例において、アクセス要求は移動車両102の車種についての情報、認可情報、および送信機アレイ110と移動車両102の受信機アレイ306との間の共振結合に影響するその他の情報を含む。一実施例において、移動車両102はエネルギー伝達制御装置106に接近しつつあるときに、無線にてアクセス要求をエネルギー伝達制御装置106に送信する。その後、移動車両102がエネルギー伝達受給を認可されているかどうかを判断する(ステップ1104)。認可されていない場合、ステップ1106に進み、エネルギー伝達制御装置106は移動車両102に認可されていない旨のメッセージを送る。メッセージに応じて、移動車両102はユーザに充電が認可されていない旨を表示することもできる。あるいはメッセージは完全に無視される。ステップ1106の後、プロセスが完了して終了となる。
【0073】
他方、ステップ1104で移動車両102に認可されているとされた場合、エネルギー伝達制御装置106は要求のあった車両の車種およびその他の情報を判断する(ステップ1108)。これは無線によるデータ問い合わせ、即ちエネルギー伝達制御装置106と移動車両102の充電モジュール302との間でのやり取りによって行うことができる。例えば、移動車両102は車両の車種が何であるかを提示してもよく、これによってエネルギー伝達制御装置106は送信機アレイ110と受信機アレイ306との間隔を推定する。移動車両102との通信において、受信機アレイ306の特定の特性についての情報および受信機アレイ306のどの属性が調節可能であるかについての情報を提供してもよい。充電制御装置902および充電モジュール302の双方がこの情報交換を利用して両アレイ110、306間でのエネルギー伝達を最適化することができる。次に、エネルギー伝達制御装置106は移動車両102の位置を求める(ステップ1110)。前に述べたように、この位置は位置センサ104A、104Bからの入力を利用してエネルギー伝達制御装置106側で計算してもよいし、あるいはまた、GPSシステム等を用いて移動車両102側が提供してもよい。次いで、エネルギー伝達制御装置106は移動車両102の軌道を予測する(ステップ1112)。この軌道とタイミングに基づいて、エネルギー伝達制御装置106は起動するコイル402を決定する(ステップ1114)。次いで、エネルギー伝達コイル402を起動しても安全であるかどうかを判断する(ステップ1116)。伝達コイル402は高周波数・高パワーであるので、人間その他の生物が送信機アレイ110近傍におり、送信機アレイを起動すると害を受ける可能性がある場合には、伝達コイル402を動作させないようにする。エネルギー伝達コイルの起動が安全でない場合には、ステップ1106に進み、エラーメッセージを送信する。他方、エネルギー伝達コイルを起動しても安全である場合は、プロセスを続行し、移動車両102の新たな位置を求める(ステップ1118)。次いで、新たな位置に基づいてコイルパラメータを調節する(ステップ1120)。次いで、エネルギー伝達制御装置106は、移動車両102がコイル上を通過するときに、コイルを順次オン・オフする(ステップ1122)。最後に、移動車両102に伝達されたエネルギー量を求め(ステップ1124)、課金データベースを更新する(ステップ1126)。
【0074】
以上の本発明の実施例の説明は例示と説明を目的としたものであって、本発明の全てを説明することを意図してはおらず、また本発明を開示した形態そのものに限ることを意図してもいない。以上の開示に照らして多くの変形や改変が可能である。本発明の範囲はこの詳細な説明によって限定されるものではなく、本願の請求の範囲によって定義される。この技術分野に精通した者には明らかであるが、本発明の思想即ち本質的特徴を逸脱することなく、別の具体的諸形態で本発明を実施することができる。同様に、モジュール、ル
ーチン、特徴、属性、方法論、およびその他の態様の具体的な名称や区分は必須のものではなく、即ち特に重要な意味を有するものではなく、本発明やその特徴を実施する機構は異なる名称、区分および/または形式を有してもよい。更に、当業者には明らかなことであるが、本発明のモジュール、ルーチン、特徴、属性、方法論、およびその他の態様はソフトウエア、ハードウエア、ファームウエア、またはこれら3つの任意の組み合わせによって実施することができる。また、モジュールを例とする本発明の要素がソフトウエアとして実施される場合には、該要素を単独のプログラムとして、より大きなプログラムの一部として、複数の別々のプログラムとして、静的あるいは動的にリンクされたライブラリとして、カーネルをロード可能なモジュールとして、デバイスドライバとして、および/またはコンピュータプログラム技術者に現在あるいは将来知られるその他の手段として実施される。また、本発明の実施は何らかの特定のプログラム言語、特定のオペレーティングシステム、特定の環境に限られるものではない。従って、本発明の開示は例示を目的としており、請求の範囲に記載される本発明の範囲を限定するものではない。
【符号の説明】
【0075】
100 エネルギー伝達システム
102 移動車両
104a、104b 位置センサ
106 エネルギー伝達制御装置
108 GPSシステム
110 送信機アレイ
112 道路
200 エネルギー伝達システム
202 信号機
204 停止線
206 道路
302 充電モジュール
306 受信機アレイ
320、322、324 信号線
402 コイル
502 道路
504、506、510 コイル
606、608 信号線
【技術分野】
【0001】
本発明はエネルギーを伝達するためのシステムおよび方法に関わるものであり、特に道路から移動する車両にエネルギーを伝達するシステムおよび方法に関わる。
【0002】
ここで「道路」及び「車両」は広義に解するものとする。即ち、両要素は通路と電動式の移動システムであってもよい。本発明は屋内用のより小規模なシステムの一部として用いることもできる。その場合、道路あるいは通路を床あるいは走路と言い換えてもよく、また車両はカート、スクーター、またはフォークリフトトラック等と言い換えてもよい。
【背景技術】
【0003】
化石燃料が過去の遺物となるにつれ、代替エネルギー源がエネルギーの活用、貯蔵および利用における新時代を先導している。特に自動車の分野ではかつてガソリンの燃焼により駆動されていたエンジンが、車両内のバッテリに蓄えられた電力により動作するエンジンに置き換えられつつある。これは汚染、特に炭素エミッションのような問題を解決する一方で、新たな問題を生みだしている。
【0004】
その課題の一つは後の使用に供するためにバッテリ等のエネルギー源を充填即ち充電することである。現在エネルギー源を充電するにはエネルギー伝達センターを見つけ、遂行中の作業を中断してエネルギー伝達のために停車する必要がある。特に問題となるのは、電動車両の電源を充電するのに3時間以上はかからないとしても、多くの場合2時間程度はかかることである。このようなエネルギー伝達センターの一例はガソリンを販売し供給するガソリンスタンド(サービスステーション)である。しかし既存のガソリンスタンドの大部分は充電中の車両を駐車する十分な駐車スペースを持たない。
【0005】
完全電気車両の多くは、車両を使用しないときに駐車しておくガレージにおいて充電される。例えば壁コンセントにプラグを挿してエネルギー貯蔵器を充電する。この方法は用途が通勤に限られる車両においては許容できるが、より長距離を走行する場合には利用性を制限することになる。このため多くの場合、完全電化車両の利用可能範囲は100マイル(約160キロメートル)以下に制限される。
【0006】
走行中の車両にエネルギーを伝達しようという試みがなされて来たが、これまでのところ成果は上がっていない。特に問題となるのは車両が伝達コイル上を高速で移動することである。車両の速度が大きければ伝達時間は短くなる。このため、既存のシステムでは走行中の車両に効果的にエネルギーを伝達することができない。また、静止した対象に対して有効な方法を用いたエネルギー伝達センターを開発する試みもなされているが、このような方法では移動する対象を充電することはできない。
【0007】
一時的なエネルギー貯蔵用の電気システムの潜在的な用途については以下の文献に記載されている。
【先行技術文献】
【非特許文献】
【0008】
【非特許文献1】W.Kempton and Steven Letendre, "Electric Vehicles as a New source of Power for Electric Utilities", Transportation Research 2(3), pp.157-175, 1997
【発明の概要】
【0009】
本発明は移動車両用のエネルギー伝達システムにおいて従来技術の問題を解決するものである。本発明のシステムは送信機アレイと、エネルギー伝達制御装置と、受信機アレイと、充電モジュールとを有する。一実施形態において、送信機アレイは道路に埋設されており、またエネルギー伝達制御装置は送信機アレイに結合されかつ道路付近に設置される。受信機アレイおよび充電モジュールは電動自動車等の移動車両の一部である。送信機アレイおよび受信機アレイはそれぞれ複数のコイルを含む。エネルギー伝達制御装置は移動車両の予想される軌道を推定し、この位置推定を利用して送信機アレイの個々のコイルに電力供給する。エネルギー伝達制御装置は伝達サイクル中に共振結合キャパシタンス値等の送信機アレイの共振回路要素の値を変更する。充電モジュールもまた受信機アレイ内のコイルの共振回路要素の値を変更して、送信機アレイから受信機アレイへのエネルギー伝達において送信機アレイと同調するようにする。伝達周波数即ちコイル共振周波数(インダクタンスあるいはキャパシタンス)を送信機アレイと受信機アレイの双方で調節し、異なる天候および道路状態において最大の伝達効率を実現する。最適な整調(チューニング)はコイルの結合係数を含む多くの要因により変化する。結合係数は道路上での車両の正確な位置を推定するモジュールを用いて変更する。共振要素のリアルタイム調節には、伝達効率を向上するために車両位置データを用いる。本発明はまたエネルギー伝達方法も提供する。
【0010】
上記システムにおいて、送信機アレイは道路内に位置し、受信機は車両内に位置するものとして説明している。他の実施形態では、車両内に送信機アレイを有し、道路内に受信機アレイを有する場合もある。また、道路および車両共に送信機アレイと受信機アレイとの両方を備えるようにし、エネルギー伝達制御装置の制御の下にいずれの方向にもエネルギー伝達ができるようにすることも可能である。誘導コイル等のある種の送信および受信部品は車両内および道路内での双方向の送受信(即ちエネルギーの送出と受給)用に利用することができ、スペースとコストが削減できる。双方向のエネルギー伝達は、日常的には電気エネルギーを車両に供給し、時折車両から道路にエネルギーを与えるように利用してもよい。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施例によるエネルギー伝達システムを示すブロック図である。
【図2】本発明の別の一実施例によるエネルギー伝達システムを示すブロック図である。
【図3】本発明の一実施例による、受信機アレイ、充電モジュール、およびエネルギー貯蔵ユニットを備えた移動車両を示すブロック図である。
【図4A】本発明の一実施例による送信機アレイを示すブロック図である。
【図4B】本発明の第二の実施例による送信機アレイを示すブロック図である。
【図4C】本発明の第三の実施例による送信機アレイを示すブロック図である。
【図5A】本発明の一実施例による移動車両、送信機アレイ、および様々な軌道を示すブロック図である。
【図5B】本発明の第一の実施例による送信機アレイ、受信機アレイ、および様々な軌道を示すブロック図である。
【図5C】本発明の第一の実施例による送信機アレイ、受信機アレイ、および様々な軌道を示すブロック図である。
【図5D】本発明の第一の実施例による送信機アレイ、受信機アレイ、および様々な軌道を示すブロック図である。
【図6】本発明の一実施例による送信機アレイのコイルおよびその回路、ならびに受信機アレイの対応するコイルおよびその回路を示すブロック図である。
【図7】本発明の第二の実施例による送信機アレイのコイルおよびその回路、ならびに受信機アレイの対応するコイルおよびその回路を示すブロック図である。
【図8】本発明の一実施例による移動車両の充電モジュールを示すブロック図である。
【図9】本発明の一実施例によるエネルギー伝達制御装置を示すブロック図である。
【図10】本発明の一実施例によるエネルギー伝達制御装置の充電制御装置を示すブロック図である。
【図11A】本発明の一実施例によるエネルギー伝達方法を示すフローチャートである。
【図11B】本発明の一実施例によるエネルギー伝達方法を示すフローチャートである。
【発明を実施するための形態】
【0012】
図面は本発明の例を示すものであり、添付図面は本発明を限定するものではない。
【0013】
また本発明の様々な実施例を図示するが、これは例示のみを目的としたものである、図面において、可能な限り同様のあるいは類似の参照符号を用いて同様のあるいは類似の機能を示している。当業者には以下の説明から明らかなように、ここで説明する発明の原理から離れることなく、ここに図示した構造および方法とは別の実施形態をとることもできる。
【0014】
エネルギーを移動システム、特に車両に伝達するシステムおよび方法を開示する。エネルギー貯蔵ユニットを備える移動車両がエネルギー伝達領域に接近すると、エネルギー伝達制御装置は接近しつつある移動車両を検知し、移動車両の軌跡を計算する。移動車両がエネルギー伝達領域の送信機アレイを通過するとき、エネルギー伝達制御装置は移動車両に効率的にエネルギーを伝達するように自己校正を行う。移動車両は停車する必要はなく、また移動車両の運転者は移動車両をエネルギー伝達用差込口にプラグ接続する必要もない。移動車両へのエネルギー伝達は滞りなくシームレスかつ自動的に行われ、移動車両の運転者はいかなる操作も行う必要がない。
【0015】
以下においては、本発明を隅々まで理解できるように、説明を目的として多くの具体的構成の細部を述べるが、これらの具体的な細部を離れて本発明を実施することが可能であることは当業者には明らかである。また、曖昧さを避けるために構造や装置をブロック図形式で示している場合もある。
【0016】
本明細書において「一実施例」または「実施例」と言う場合、その実施例に関連して説明するある特定の特徴、構造または特性が本発明の少なくとも1つの実施例に含まれることを意味する。即ち、本明細書の随所に現れる「一実施例において」という文言は、必ずしも全てが同一の実施例を意味するものではない。
【0017】
また、その数量を明示せずに実施例中の要素や部品を記載するのは単に便宜上のことであり、かつまた発明の概括的な理解を与えることを意図したものであって、このような記載は、それらの要素や部品がそれぞれ1つ以上の場合、1つのみの場合、および複数の場合を含むものとする。但し、このような意図ではないことが明らかな場合はこの限りではない
【0018】
いくつかの実施例の説明において、「結合される(coupled)」および「接続される(connected)」という語がそれらの活用形・派生語を含めて用いられている。これらは互いに同義語として用いられているのではないことを理解されたい。例えば、実施例によっては、「接続(される)」という語が2つ以上の要素が互いに物理的または電気的に直接接触していること意味している。また別の例として、「結合(される)」という語が2つ以上の要素が互いに物理的または電気的に直接接触していることを意味している実施例もある。しかしながら、「結合(される)」は2つ以上の要素が互いに直接的には物理的また
は電気的に非接触でありながら、互いに協働あるいは相互作用していることを意味する場合もある。したがって、「結合(される)」という語は、「連結」「接続」「関連」「連係」「協調」「協働」の意味を含む場合もある。この点において実施例が限定されるものではない。
【0019】
また本明細書において、「〜からなる」「〜を含む」「〜を備える」「〜を有する」という語およびそれらの活用形は排他的な包含を意図したものではない。例えば列挙された一連の要素からなる工程、方法、物品、装置というのはそれらの要素のみを含むのではなく、明示的には挙げられていない他の要素、あるいはまたそれらの工程、方法、物品、装置が本来的に有する他の要素を含むこともできる。更に、そうではない旨の明示的記載がない限り、「または」という語は包含的な「または」であって、排他的な「または」ではない。例えば「条件AまたはB」は以下のいずれの場合にも満たされる、即ちAが真(存在)かつBが偽(非存在)の場合、Aが偽(非存在)かつBが真(存在)の場合、およびAとB共に真(存在)の場合。
【0020】
以下の詳細の説明は、コンピュータのメモリ内におけるデータビットの演算アルゴリズムや象徴的な表現を用いてなされた部分を含んでいる。これらのアルゴリズム的記載や表現は電気業界の当業者が他の当業者に技術の本質を最も効果的に伝える手段として用いられている。一般的にもそうであるように、ここでアルゴリズムとは所望の結果に至る一貫した一連のステップを意味する。ステップは物理量の物理的な変更または操作を必要とするものである。必ずではないが、たいていの場合これらの物理量は保存、送信、結合(combine)、比較およびその他の操作が可能な電気または磁気信号の形態である。主に広く用いられている用語法であるという理由により、これらの信号をビット(bits)、値(values)、要素(elements)、記号(symbols)、文字(characters)、項(言葉)、数字(numerals)などで言い表すのが便利な場合があるとされている。
【0021】
しかしこれらおよび類似の用語は適当な物理量と関連づけられるべきものであって、たんにこれら物理量の便宜上の呼び名に過ぎないことを理解されたい。以下の説明から明白なように、特段の別記がなければ、明細書の説明全体を通じて、「処理する」「演算する」「計算する」「判断する」「決定する」「計測する」「求める」「表示する」等で表現される動作は、コンピュータシステムまたはそれに類する電子計算機の動作やプロセスを表すものとする。このコンピュータシステムあるいは電子計算機はコンピュータシステムのレジスターおよびメモリ内の物理量(電気的な量)によって表現されるデータを操作し、同様にコンピュータシステムあるいは電子計算機はコンピュータシステムのメモリ、レジスターまたはその他の情報を格納、送信または表示する装置内の物理量によって表現される他のデータに変換するものである。
【0022】
本発明はまた、これら動作を行う装置に関する。この装置は所望の目的専用に構築された装置であってもよいし、コンピュータ内に保存されたコンピュータプログラムによって選択的に起動されたり再構成されたりする汎用コンピュータであってもよい。このようなコンピュータプログラムはコンピュータによって読み取り可能な記録媒体に記憶させてもよい。このコンピュータにより読み取り可能な記録媒体としては、それに限定されるものではないが、例えば磁気ディスク、光ディスク、CD−ROM、光磁気ディスクなどの任意のディスク、読み取り専用メモリ(ROM)、ランダムアクセスメモリ(RAM)、EPROM、EEPROM、磁気または光カード、または電子的指令を格納するのに適した任意の形態の媒体等があり、これらはいずれもコンピュータシステムのバスに結合される。
【0023】
本明細書で説明するアルゴリズムおよび表示は、なんらの特定のコンピュータその他の装置にも本来的に関連づけられるものではない。本明細書の記載に沿って、プログラムと
共にプロセッサ、メモリ、不揮発性記憶装置、入力装置、出力装置を含む種々の汎用演算システムを用いてもよいし、本発明の方法の要求するステップを実行するためにより特化した装置を構築するほうがよいということになる場合もあるかもしれない。これら様々なシステムに必要な構成は以下の説明によって明らかとなるであろう。また、特定のプログラミング言語を用いることなく本発明を説明するが、ここに説明する本発明の実施には様々なプログラミング言語を用いることができる。
【0024】
<エネルギー伝達システム100、200>
図1にエネルギー伝達システム100の第1の実施例を示す。エネルギー伝達システム100は移動車両102、1つ以上の位置センサ104a、104b、エネルギー伝達制御装置106、任意選択のGPSシステム(全地球測位システム)108および送信機アレイ110を含む。本実施例では本発明の原理に従って、エネルギー伝達システム100をカーブした道路112に設けている。エネルギー伝達システム100は移動車両102の速度が低下する場所に設けることが好ましい。特に、移動車両102の速度が低下するということは伝達時間が長いということであり、これは一つのコイル当たりの伝達エネルギーがより大きく、距離当たりに必要とされるコイルの数がより少ないことを意味する。
【0025】
移動車両102は電気エネルギーを必要とするものであればいかなる種類の車両であってもよい。移動車両102は例えばトヨタ自動車株式会社が製造・販売するプリウスのような種々のハイブリッド車両や完全電気車両に設けられる他の様々な電気的システム、機械的システム、通信システムを備えている。ここでは電気自動車およびハイブリッド自動車に関して本発明を説明するが、当業者には明らかであるように、本発明は他の移動式装置へのエネルギー伝達にも利用することができる。他の移動装置とは、例えば携帯電話機、可搬式の電子機器、ロボット車椅子、個人装着式移動装置(サイバーミュール:cyber mule)、セグウェイ(segway)のようなタイプの車両を含むが、これらに限定されるものではない。本発明において、移動車両102はまた、充電モジュール302、エネルギー貯蔵ユニット304、および受信機アレイ306(図3も参照)を備える。移動車両102の詳細については、図3および図8を参照して後述する。充電モジュール302は移動車両102の位置および方向を判断し、その情報を他の装置に伝達することができる。受信機アレイ306は移動車両102のエネルギー貯蔵ユニット304に貯蔵するエネルギーを送信する送信機アレイ110と結合可能である。充電モジュール302は位置センサ104a、104b、エネルギー伝達制御装置106、およびGPSシステム108と通信可能に構成されている。
【0026】
1つまたは複数の位置センサ104a、104bは道路112近傍に配置されている。図示のように、位置センサは参照符号104aで示すように照明灯のような路傍の機器と一体化して設けてもよく、あるいは参照符号104bで示すように独立した単独の装置としてもよい。図1に破線で示すように、位置センサ104a、104bは有線あるいは無線でエネルギー伝達制御装置106に結合される。一実施例において、位置センサ104a、104bは移動車両と通信するように構成されかつ移動車両102と結合して、速度、ディレクトリ(directory)、および軌道(trajectory)情報を受信するのみであり、それをエネルギー伝達制御装置106に送信する。別の実施例では位置センサ104a、104bは独自に移動車両102の速度、ディレクトリ、軌道を計測し、それをエネルギー伝達制御装置106に送信する。
【0027】
エネルギー伝達制御装置106は移動車両102、位置センサ104a、104b、GPSシステム108,および送信機アレイ110と結合して通信を行う。エネルギー伝達制御装置106は送信機アレイ110に電力を供給する。エネルギー伝達制御装置106は送信機アレイ110内の特定のコイルの起動および共振パラメータの制御を行う。エネルギー伝達制御装置106は移動車両102の軌道および速度を計算し、送信機アレイ1
10内のどのコイルを起動するか、およびそれらコイルをいつ起動するかを決定する。また、エネルギー伝達制御装置106は送信機アレイ110のコイルの共振パラメータを制御して、エネルギー伝達を最大化する。エネルギー伝達制御装置106は位置、方向、速度、車両タイプ、受信機アレイ306のコイルのパラメータ等の情報を用いて、送信機アレイ110の起動時期と共振パラメータとを決定する。エネルギー伝達制御装置106について、図9および図10を用いてより詳細に後述する。
【0028】
GPSシステム108は従来型のものであり、図1では衛星によって示される。GPSシステム108は複数の衛星に設けた送信機と、衛星信号を受信して衛星信号から受信機の位置を三角法によって計測する受信機とを含む。GPSシステム108は移動車両102およびエネルギー伝達制御装置106と通信し、位置情報を提供するように構成されている。
【0029】
送信機アレイ110は複数のコイル(図4乃至図7参照)を備える。送信機アレイ110はエネルギー伝達制御装置106と結合して電力の供給を受ける。送信機アレイ110はまたエネルギー伝達制御装置106から受信する信号によって制御される。送信機アレイ110のさらなる詳細について、図4乃至図7を用いて後述する。
【0030】
図2にエネルギー伝達システム200の第2の実施例を示す。エネルギー伝達システム200のこの実施例は、移動車両102、1つ以上の位置センサ104a、104b、エネルギー伝達制御装置106,任意選択のGPSシステム108、および送信機アレイ110を含む。このシステム200において前述のシステム100と同一あるいは同様の機能を有する要素は同様の参照符号を用いて示している。
【0031】
この実施例では、本発明の原理に従って、エネルギー伝達システム200を信号機202の直前に配置している。信号機202に対応する停止線204は信号機202を通過する車両が停止すべき位置を示している。本発明に従って、送信機アレイ110は道路206内の表面下に停止線204から所定の距離で配置されている。例えば送信機アレイ110を停止線204の前方10フィートから50フィート(約3メートルから約15メートル)の距離に配置する。これにより移動車両102が送信機アレイ110を通過する際に確実に減速されるようになる。図2では位置センサ104a、104bの位置も異なっている。図1における位置とは異なり、位置センサ104a、104bは道路106の同じ側に、道路に沿って間隔を置いて位置している。送信機アレイ110を信号機の手前として説明したが、当業者には明らかなように、移動車両102が比較的低下する場所は例えば出・入ランプ内のように他にも様々あり、送信機アレイ110をそのような場所に設けてもよい。
【0032】
<移動車両102>
図3に移動車両102の一実施例を示す。上に説明したように、移動車両102は充電モジュール302、エネルギー貯蔵ユニット304、および受信機アレイ306を有する。一実施例において、移動車両102は従来型の完全電動車またはハイブリッド車に本発明の充電モジュール302、エネルギー貯蔵ユニット304、および受信機アレイ306を付加したものである。
【0033】
充電モジュール302は受信機アレイ306の動作を制御し、受信機アレイ306に発生されるエネルギーをエネルギー貯蔵ユニット304に移送する。充電モジュール302はエネルギー伝達制御装置106に情報を伝え、エネルギー伝達制御装置106が送信機アレイ110から受信機アレイ306に伝達されるエネルギー量を最適化かつ最大化できるようにする。充電モジュール302の一実施例は、図8を参照しつつ後ほど説明する。充電モジュール302は信号線320によって受信機アレイ306と結合され、受信機ア
レイ306の発生するエネルギーを受け取る。また、充電モジュール302は信号線322によって受信機アレイ306と結合され、受信機アレイ306に制御信号、特に受信機アレイ306のコイルに1つ以上の共振パラメータを指定する信号を送る。また、充電モジュール302は信号線324によってエネルギー貯蔵ユニット304に結合され、エネルギー貯蔵ユニット304にエネルギーを送る。
【0034】
エネルギー貯蔵ユニット304は従来型のものであり、一実施例においては充電池群とそれに関連する電子装置である。別の実施例では、エネルギー貯蔵ユニット304は完全電気車やハイブリッド車に用いられる既存の充電池とそれに関連する電子装置である。エネルギー貯蔵装置304は信号線324によって充電モジュール302と結合され、受信機アレイ306の発生するエネルギーを受け取る。別の実施例(不図示)においては、エネルギー貯蔵ユニット304は受信機アレイ306と直接結合されて、発生されたエネルギーを受け取る。
【0035】
受信機アレイ306は複数のコイルである。受信機アレイ306は、図5を参照して後ほどより詳細に説明する。受信機アレイ306は電力伝達を最適化するように整調可能な複数のコイルを含む。一実施例において、受信機アレイ306コイルの共振特性を送信機アレイ100の対応するコイルの共振特性と同調するように整調する。以下において、受信機アレイ306のコイルの実施例を図6および7を参照してより詳細に説明する。受信機アレイ306は信号線320によって充電モジュール302と結合され、充電モジュール302にエネルギーを与え、また信号線322によって充電モジュール302から制御信号を受信する。
【0036】
<送信機アレイ110>
図4A〜5Dを参照して、送信機アレイ110の様々な実施例を説明する。当業者には明らかであろうように、このほかにも送信機アレイ110の様々な構成があり、ここに示すものは単なる例示にすぎない。しかしながら、送信機アレイ110は以下の共通の性質を有している、即ち(1)複数のコイルを有し、(2)これらコイルは道路を横切って異なる横方向位置を有し、(3)各コイルは整調可能である。
【0037】
図4Aに、送信機アレイ110Aの第1の実施例を示す。図4Aは送信機アレイ110Aのごく基本的な実施例を示す上平面図である。送信機アレイは複数のコイル402A〜402nを含む。コイル402A〜402nは送信機アレイ110Aの横方向軸に沿って離間している。この実施例の送信機アレイ110Aは、道路112、206の幅よりわずかに小さい好適な大きさとしている。このため、道路112、206上における移動車両102の位置にかかわらず、少なくとも1つのコイル402A〜402nが受信機アレイ306の対応するコイル(不図示)と整列する。図示してはいないが、各コイル402A〜402nはエネルギー伝達制御装置106と結合されており、コイル402A〜402nを整調するための信号を受信する。更に、一実施例において、コイル402A〜402nは受信機コイルと一致する大きさとする。例えば、効率的に動作させるには、コイル402A〜402nの幅と長さを最小の30インチ×30インチ(約76センチメートル)、コイルの巻線高を2インチ(約5センチメートル)とし、また道路内に配置したコイルと移動車両102内の受信機アレイ306との間隔を6乃至18インチ(約15乃至45センチメートル)とする。送信機コイルの配置は受信機コイルを通過する磁束密度を最大化するように最適な設計とする。送信機コイルと受信機コイルの軸を道路面に垂直にすることで、高強度の磁束密度が受信コイルに与えられる。この配置により、少なくとも1つのコイルが同等の大きさを有し、最大の結合係数kと最大のエネルギー伝達効率をもたらすように正確に整列されることが保証される。この実施例では、移動車両102が送信機アレイ110A上を通過する際に、受信機コイルと整列する一つまたは少数のみのコイル402A〜402nのみを起動する。これはエネルギー伝達を最大化しつつエネルギーを
節約できるという点で特に有利である。
【0038】
図4Bに、送信機アレイ110Bの第2の実施例を示す。図4Bは送信機アレイ110Bの上平面図である。この第2実施例の送信機アレイ110Bもまた、複数のコイル402A〜402nを含んでおり、かつ送信機アレイ110Bは道路112、206の幅よりわずかに小さい好適な大きさとしている。コイル402A〜402nは送信機アレイ110Bの横方向軸に沿って離間していると共に、送信機アレイ110Bの縦方向軸に沿っても離間しており、送信機アレイ110Bの一つの角部から他の角部まで対角線上に位置している。送信機アレイ110Bのこの構成は、移動車両102の動きや送信機アレイ110Bの個々のコイル402A〜402nの起動タイミングに関してより柔軟性を有する点で有利である。本実施例は配置の柔軟性と送信機アレイ110Bのコストとのバランスが取れている。
【0039】
図4Cに送信機アレイ110Cの第3の実施例を示す。図4Cは送信機アレイ110Cの上平面図である。この第3実施例の送信機アレイ110Cもまた、複数のコイル402A〜402n*mを含んでおり、かつ送信機アレイ110Cは道路112、206の幅よりわずかに小さい好適な大きさとしている。本実施例においては、n×mのコイル402A〜402n*mを格子状に配置している。本実施例では、移動車両102が送信機アレイ110Cを通過する際に複数のコイル402A〜402n*mを縦に順次起動してより多くの電力を伝達できるので有利である。例えばコイル402b、402n+2、4022n+2を順番に起動して個々のコイルが受信機アレイ306の受信機コイルにエネルギーを伝達することができる。この例ではこれらコイルが送信機アレイ110Cの縦方向軸に沿って整列しているものとしているが、送信機アレイ110C上での移動車両102の軌道に対応して、送信機アレイ110Cの異なる列のコイルを起動することもできる。本実施例において、各コイルは受信機アレイ306の受信機コイルの共振に同調するように整調可能である。
【0040】
図5Aに送信機アレイ110Dの第4の実施例を示す。図5Aは送信機アレイ110D、道路502および道路502を通過する移動車両102を示す上平面図である。この第3実施例の送信機アレイ110Dもまた、複数のコイル402A〜402Dを含んでおり、かつ送信機アレイ110Dは道路112、206、502の幅よりごくわずかに小さくなる好適な大きさとしている。本実施例では、4つのコイル402A−402Dを独自のパターンで配置して道路502の幅をカバーしている。図5Aは移動車両102が送信機アレイ110D上を通過する際に通る可能性のある4つの軌道T1、T2、T3、T4を示している。図5Aに示すように、移動車両102の軌道によっては、1つのコイルのみが起動されて受信機アレイ306(不図示)にエネルギーを伝達する。例えば移動車両102が軌道T1をとった場合、コイル1(402A)が適宜の時期に起動されて受信機アレイ306にエネルギーを伝達する。同様に移動車両102が軌道T2をとった場合、コイル2(402B)が適宜の時期に起動されて受信機アレイ306にエネルギーを伝達する。同様に、移動車両102が軌道T3および軌道T4をとった場合に、それぞれコイル3(402C)、コイル4(402D)が起動される。図5Aは更に、エネルギー伝達制御装置106が送信機アレイ110Dに結合されてコイル402A〜402Dに共振パラメータを与えることを示している。
【0041】
図5B〜5Dに送信機アレイ110Eの更に別の実施例を示す。図5B〜5Dは送信機アレイ110E、道路502および道路502を通過する移動車両(不図示)の受信機アレイ306を示す上平面図である。図5B〜5Dでは特に破線によって移動車両102の受信機アレイ306が送信機アレイ110E上を通過する際の軌道を示している。本実施例において、送信機アレイ110Eは複数のコイル列を含む。3列のコイルのみを図示しているが、当業者はこのパターンを連ねて任意の列数のコイルを含むようにするやり方を
理解できるであろう。奇数番の列(第1および第3列)は縦方向に他の奇数番の列と整列している。同様に偶数番の列は他の偶数番の列と整列するようにすることができる。偶数番の列は縦方向に見て奇数番の列のコイルとは位置を若干ずらしている。これによって少なくとも1つのコイルが確実に受信機アレイ306のコイルと正確に整列するので有利である。
【0042】
図5Bでは、受信機アレイ306は(従って移動車両102は)道路502の左側に位置する。従って、受信機アレイ306が送信機アレイ110E上を通過する際に、受信機アレイ306のコイル510は送信機アレイ110Eのコイル504と整列する。受信機アレイ306は2×3のアレイに配列された6つのコイルを含む。しかし当業者には明らかなように、受信機アレイ306は車両の前部から後部に配列された複数の受信機コイルの任意の大きさのアレイ構成とすることができ、一次元的な配列であってもよい。受信機アレイ306が送信機アレイ110E上を通過する際に、エネルギー伝達制御装置106は送信機アレイ110Eのこれら4つのコイル504を選択的に起動する。更に以下において図6および7を参照して説明するように、コイル504とコイル510の共振を互いに同調させて最大限のエネルギー伝達を与えるように整調する。
【0043】
図5Cでは、受信機アレイ306は道路502の右側に位置する。この場合、受信機アレイ306が送信機アレイ110E上を通過する際に受信機アレイ306のコイル510は送信機アレイ110Eのコイル506と整列する。受信機アレイ306が送信機アレイ110E上を通過する際に、エネルギー伝達制御装置106は送信機アレイ110Eのこれら4つのコイル506を選択的に起動する。
【0044】
図5Dでは、受信機アレイ306は道路502のやや右側に位置している。この場合、受信機アレイ306が送信機アレイ110E上を通過する際に受信機アレイ306のコイル510は送信機アレイ110Eのコイル508と整列する。受信機アレイ306が送信機アレイ110E上を通過する際に、エネルギー伝達制御装置106は送信機アレイ110Eのこれら2つのコイル506を選択的に起動する。
【0045】
図5B〜5Dに示した例示のための実施例から、縦横に配列した複数のコイルを用いることにより、より大きなエネルギーを伝達することができ、かつ最も近く整列したコイルを選択的に起動することによりエネルギーを節約することができることが当業者には理解されるであろう。
【0046】
一実施例において、コイルアレイは太いゲージ#00の銅線の4回巻きで30インチ×30インチ(約76センチメートル)の大きさである。例としては、コイルの幅と長さはコイル間隔の少なくとも5倍である。コイル間の間隔が小さくてもよい場合には、コイルの幅と長さを小さくする。コイルおよびその間隔が小さければ、送信機アレイ110および受信機アレイ306を1次元的にも2次元的にも配列することができる。別の実施例ではコイル線として超伝導線を用いてコイル損失を低減するが、超伝導体の臨界電流を越えてはならず、越えた場合には効率性が失われる。臨界電流が低いと超伝導線の許容入力が制限される。更に、各コイルの周波数は等しくし、また個々の送信機コイルの位相を外部磁場が加算的(additive)となるように制御する。近くのコイル線には同一方向の電流が流れるようにしなければならない(即ちコイル毎に反対の電流方向極性とする)。
【0047】
別の実施例では、送信機アレイ110のコイル402の大きさは受信機アレイ306のコイル510の約2倍である。例えば、送信機アレイ110のコイル402の大きさを2メートル×2メートルとし、受信機アレイ306のコイル510の大きさを1メートル×1メートルとする。この場合、道路側コイル402が2倍大きいことにより、エネルギー伝達時間が長くなりかつ操舵における許容条件が緩和されるので特に有利である。
【0048】
<共振制御>
図6を参照して、本発明の一実施例による送信機アレイ110のコイルL1と受信機アレイ306の対応するコイルL2について説明する。図6は理解を容易にするために送信機アレイ110の1つのコイルL1と受信機アレイ306の対応するコイルL2のみを図示しているが、当業者は理解するであろうように、送信機アレイ110および受信機アレイ306はいくつかのコイルを有し、そのうちの1つ以上のコイルがある時に充電関係となる。送信機アレイ110内の各コイルL1は、エネルギー伝達制御装置106から信号線608を介して個別の送信コイル制御信号を受信し、信号線606を介して送信共振制御信号を受信する。これにより、エネルギー伝達制御装置106は要求通りにコイルL1を選択的にオン・オフし、かつ対応する受信機コイルL2へのエネルギー伝達を最大化するのに必要とされるコイルL1の整調を行うことが可能となる。同様に、受信機アレイ306内の各コイルL2は信号線322を介して個別の受信共振制御信号を充電モジュール302から受信する。本発明では、このようにして送信機アレイ110および受信機アレイ306の双方を様々な条件においてエネルギー伝達を最適化するように整調可能である。
【0049】
図6に示すように、コイルL1はそれに関連する回路602を有しており、該回路602は可変キャパシタC1、抵抗R1および可変周波数電源610を含む。本発明の利点として、共振パラメータ、周波数およびキャパシタンスを調節しており、それによりコイルL1とコイルL2間の共振コイル結合によってエネルギー伝達を最適化する。更に、信号線608の送信機コイル制御信号がスイッチを制御し、受信機アレイ306が送信機アレイ110上を通過しているときにのみコイルが起動されるようにする。受信機アレイ306および送信機アレイ110はある間隔で隔てられており、一点鎖線620は道路面を示している。コイルL2はそれに関連する回路604を有しており、該回路604は可変キャパシタC2および抵抗R2を含む。上記と同様に、この関連する回路604は信号線322を介して受信機共振制御信号を受信するように結合されている。この信号はC2のキャパシタンスを変化させ、受信機アレイ306を送信機アレイ110と同調するように整調する。本発明は間隔の大きさ、電源610の周波数、受信機アレイ306と送信機アレイ110が共振結合している時間の長さ、およびキャパシタンスの値を好適に利用してエネルギー伝達を最適化する。これらの要素に基づいて、エネルギー伝達制御装置106および充電モジュール302は送信機コイル制御信号、送信機共振制御信号、および受信機共振制御信号を生成し、送信機コイルL1に対する移動車両位置に応じて変化するk値にかかわらず、C1およびC2の正確な値を与える。一次および二次コイル回路602、604内に共振キャパシタ(上記のキャパシタ)を設けて、一次および二次の寄生インダクタンスによって生ずるインピーダンスの補正を提供することによって、伝達効率を向上させる。エネルギー伝達中にキャパシタC1およびC2の値を変化させることにより、伝達中の共振現象を最適化し、かつ伝達の平均効率を高める。この構成は共振コイルシステムのパラメータおよび励起される個々の特定コイルの通過時間の動的な変動を許容する。より詳細には、共振キャパシタンスの値は伝達インターバル中(伝達の合間)に変化させる。受信回路の実効負荷抵抗Vload/Iloadもまた伝達インターバル中に変化させる。伝達インターバルが生じる位置とその持続時間は充電コイル上での移動車両102の軌道に応じて変化する。
【0050】
ここで図7に送信機アレイ110のコイルL1とそれに対応する受信機アレイ306のコイルL2、およびそれらに関連する回路の第2の実施例を示す。この実施例では送信機アレイ110は電源Vddおよび追加のインダクタLcbを備えている。受信機アレイ306は図示のように結合されたブリッジ整流器と電力調整器を備えている。
【0051】
<充電モジュール302>
図8を参照して充電モジュール302の一実施例を説明する。充電モジュール302は車両充電制御装置802、車両認可モジュール804、位置指示モジュール806、車両通信モジュール808、プロセッサおよびデータ保存部810、およびエネルギー貯蔵モジュール812からなる。
【0052】
車両充電制御装置802は情報を受信し、信号線322を介して受信機アレイ306に出力される制御信号を発生する。車両充電制御装置802は特に受信機共振制御信号を発生する。この信号はコイルL2の1つ以上の動作パラメータを制御する。一実施例において、車両充電制御装置802は信号線322に結合された出力と、車両通信モジュール808並びにプロセッサおよびデータ保存部810から情報を受信するように結合された入力と、を有するハードウエア制御装置である。別の実施例においては、車両充電制御装置802はプロセッサおよびデータ保存部810によって実行可能なソフトウエアであって、該ソフトウエアによりプロセッサが受信機共振制御信号を出力する。車両充電制御装置802は、送信機アレイ110から受信機アレイ306へのエネルギー伝達を最大化するように受信機コイルL2の共振パラメータを調節できるようにするために、送信機アレイ110の動作パラメータ等の情報を受信する。回路の共振パラメータは回路のキャパシタンス、およびインダクタまたは動作周波数を変えてもよい。キャパシタンス値の可変は、数個の低損失で固定値のポリプロピレン・キャパシタ(コンデンサ)、ポリスチレン・キャパシタまたはマイカキャパシタに直列接続した複数の電子制御式半導体スイッチを用いて実現してもよい。キャパシタの切り替えはそれらの電圧がゼロに近いとき行うと最も効率的である。
【0053】
車両認可モジュール804はプロセッサ810によって実行可能なソフトウエアまたはルーチンであり、認可情報を与える。一実施例において、エネルギー伝達システム100は個々のユーザに有料で提供される。エネルギー伝達システム100の利用に先立って各ユーザはアカウントを設定し、該アカウントの設定後に、ユーザに認可情報が与えられる。その後、移動車両102はこの認可情報を所与の送信機アレイ110およびエネルギー伝達制御装置106へのエネルギー伝達要求と共に送信することができる。図示してはいないが、システム100は任意の数のエネルギー伝達制御装置106とネットワーク(不図示)によって結合されたサーバー(不図示)を含んでもよいことが当業者には明らかである。このサーバーを用いて、システムの使用を検知し、ユーザに対して使用料を課金し、その他のシステムおよび使用情報を収集する。車両認可モジュール804は特定のユーザ車両に固有の認可情報を記憶するために用いる。車両認可モジュール804は車両通信モジュール808と結合され、認可情報をエネルギー伝達制御装置106に送信する。
【0054】
位置指示モジュール806は移動車両102の位置を計測する装置である。一実施例において、位置指示モジュール806は衛星からの位置信号に基づいて移動車両102の位置を三角法により計測することのできるGPS受信機である。別の実施例においては、位置指示モジュール806は複数のセルタワー(cell towers)からの信号を利用して三角法で位置を計測する。位置指示モジュール806はまた、移動車両102の位置を車両通信モジュール808に出力する。かくして、移動車両102の位置は車両通信モジュール808によってエネルギー伝達制御装置106または位置センサ104に送信される。
【0055】
車両通信モジュール808は他の車両、エネルギー伝達制御装置106およびその他の静止体または移動体との通信を行う通信装置である。一実施例において、車両通信モジュール808はデータパケットをTCP/IP形式で送信するように構成したWI−FI送受信機である。他の実施例において、車両通信モジュール808は衛星送受信機、移動体通信送受信機、または赤外線送受信機である。車両通信モジュール808はエネルギー伝達制御装置106との通信を確立し、エネルギー伝達プロセスに関する情報を送信することができる。車両通信モジュール808は車両充電制御装置802、車両認可モジュール
804、位置指示モジュール806、並びにプロセッサおよびデータ保存部810と結合される。
【0056】
プロセッサおよびデータ保存部810は従来型のものであり、後ほど図11Aおよび11Bを参照して説明する送信機アレイ110と受信機アレイ306の間でのエネルギー伝達に関連する多くの動作を実行する。一実施例において、データ保存部810は車種や受信機アレイ306との距離等に関する情報を保持している。実施例によっては、プロセッサおよびデータ保存部810がモジュール802,804、806および808の機能を果たす。プロセッサおよびデータ保存部810を用いて、車両充電制御装置802に送られ当該装置802によって出力される共振パラメータの決定を行ってもよい。
【0057】
エネルギー貯蔵モジュール812は入力および出力を有し、発生されたエネルギーを受信機アレイ306からエネルギー貯蔵ユニット304に送るように構成されている。エネルギー貯蔵モジュール812は信号線320と結合されて受信機アレイ306に発生されたエネルギーを受け取る入力を有する。一実施例において、エネルギー貯蔵モジュール812は電力調整装置を備え、受け取った電力をすべて信号線324を介してエネルギー貯蔵ユニット304に出力する。
【0058】
<エネルギー伝達制御装置106>
ここで図9を参照してエネルギー伝達制御装置106の一実施例を説明する。エネルギー伝達制御装置106は充電制御装置902、課金モジュール904、通信モジュール906、並びにプロセッサおよび保存部908からなる。エネルギー伝達制御装置106はまた、交通情報モジュール992、交通制御モジュール994,および移動車両102から情報を受信するように結合される。
【0059】
充電制御装置902は送信機アレイ110の選択されたコイルを起動し、該選択されたコイルに対する共振パラメータを設定する。充電制御装置902の一実施例は、図10を参照して後ほどより詳細に説明する。図9に示すように、充電制御装置902は信号線606に結合される出力を有し、送信機共振制御信号を供給する。この信号は送信機アレイ110のコイル共振特性を調整するパラメータを与える。充電制御装置902はまた信号線608に結合される出力を有し、送信機コイル制御信号を供給する。この信号は送信機アレイ110のどの特定のコイルをいつオン・オフするかを制御する。充電制御装置902は通信モジュール906、課金モジュール904、並びにプロセッサおよび保存部908から情報を受信するように結合される。これらのモジュール904、906および908は、特定のコイルをいつ起動するか、どのコイルを起動するか、およびコイルの起動時に用いられる共振パラメータ、を決定するために用いる種々の異なる入力を供給する。
【0060】
課金モジュール904はプロセッサ908によって実行可能なソフトウエアまたはルーチンである。課金モジュール904は通信モジュール906から認可情報を受信するように結合される。課金モジュール904は認可情報を受信し、それに応答して充電制御装置902に信号を送信し、特定の車両102に対して送信機アレイ110の起動が許可されていることを示す。課金モジュール904は充電制御装置902とも通信して、移動装置102に伝達されたエネルギー量を求め、その情報を保持する。一実施例において、課金モジュール904は課金データベース(不図示)を備え、該データベースから、過去に特定の車両102に伝達されたエネルギーの量に応じた課金(料金請求)を行うことができる。上記のように、課金モジュール904は、料金請求を発行しそれを認可情報に対応する特定のユーザに送るサーバーと結合される。別の実施例においては、ユーザがクレジットカード番号または銀行口座その他の料金請求情報を登録しておき、そうした料金請求情報を利用してエネルギー伝達の料金を自動的に請求して引き落とす。課金モジュール90
4は通信モジュール906と結合され、料金請求およびその他の手続きのためにサードパーティの財務システムとやり取りする。
【0061】
通信モジュール906は上記の車両通信モジュール808と同様の通信装置である。エネルギー伝達制御装置106は通信モジュール906によって移動車両102、交通情報モジュール992、交通制御モジュール994、およびその他のコンピュータシステム(不図示)と通信することができる。一実施例において、通信モジュール906はデータパケットをTCP/IP形式で送信するように構成したWI−FI送受信機である。他の実施例において、通信モジュール906は衛星送受信機、移動体通信送受信機、または赤外線送受信機である。通信モジュール906はまた、充電制御装置902、課金モジュール904、並びにプロセッサおよび保存部908に情報を供給するように結合される。
【0062】
プロセッサおよび保存部908は従来型のものであり、エネルギー伝達制御装置106の動作を実行するために用いられる。図11Aおよび図11Bを参照することにより、プロセッサおよび保存部908の動作がよりよく理解できる。プロセッサおよび保存部908は通信モジュール906、課金モジュール904、および充電制御装置902と結合される。プロセッサおよび保存部908は本発明の諸ルーチンを実行し、また保存部908はこれら他の要素が利用する情報を保持する。
【0063】
交通情報モジュール992は道路交通状況についての情報を提供する別のシステムである。交通情報モジュール992はエネルギー伝達制御装置106付近の交通状況に加えて交通状況全般に関する情報を提供する。例えばリアルタイム交通情報モジュール992は米国で提供されている「511.org」の如きデータシステムで公に入手できるデータと類似のデータを提供する。交通情報モジュール992は通常の交通量および速度と渋滞の速度や原因等の情報、並びに移動車両102がエネルギー伝達制御装置106を通過する際の速度に影響するようなその他の情報を提供する。プロセッサおよび保存部908はこの情報を利用して送信機アレイ110をいつ起動し、いつ停止するかについてのよりよい情報を提供する。交通情報モジュール992はエネルギー伝達制御装置106の通信モジュール906と通信するように構成される。
【0064】
交通制御モジュール994は特定の交通制御機構についての情報を提供する別のシステムである。図2を参照して前に説明した例を用いると、交通制御モジュール994は信号機202の状態についての情報をエネルギー伝達制御装置106に送信する。充電制御装置902はこの情報を用いて、送信機アレイ110の具体的な起動時期および停止時期を決定する。例えば、交通制御モジュール994は、信号機202が青から赤に変わろうとするときに、エネルギー伝達制御装置106に信号を送る。移動車両102が信号機202で減速するであろうことを認識することにより、充電制御装置902は今後の交通状況に応じて起動/停止時期および共振パラメータを修正することができる。交通制御モジュール994は、エネルギー伝達制御装置106の通信モジュール906を介して、充電制御装置902と通信するように構成される。
【0065】
ここで図10を参照して、エネルギー伝達制御装置106の充電制御装置902をより詳細に説明する。充電制御装置902は、アクセス認可モジュール1002、位置計測モジュール1004、軌道予測モジュール1006、コイル電力管理モジュール1008、コイル整調モジュール1010、および安全モジュール1012からなる。
【0066】
アクセス認可モジュール1002は移動車両102に結合され、認可情報を受信する。アクセス認可モジュール1002はコイル電力管理モジュール1008とも結合され、コイル電力管理モジュール1008による送信機アレイ110への電力供給を許容する認可信号を供給する。一実施例において、アクセス認可モジュール1002はプロセッサ90
8によって実行されるソフトウエアまたはルーチンである。認可モジュール1002は認可された諸ユーザのデータベースを有しているか、あるいは上記のようなサーバーおよびネットワークに結合され、受信した認可情報を確認する。
【0067】
位置計測モジュール1004は通信モジュール906によって位置センサ104A、104Bおよび移動車両102と結合される。位置計測モジュール1004は移動車両102の位置の計算に利用することのできる情報を受信する。一実施例において、位置計測モジュール1004は移動装置102からリアルタイム情報を受信し、該情報が位置センサ104A、104Bによって確認される。一実施例において、位置計測モジュール1004は移動車両102の位置値を生成し、それらを軌道予測モジュール1006に出力する。
【0068】
軌道予測モジュール1006は位置計測モジュール1004と結合される。軌道予測モジュール1006は移動車両102の位置情報を位置計測モジュール1004から受信する。軌道予測モジュール1006は、移動車両102の位置情報を用いて、移動車両102の今後の道筋を予測する。特に、図5を参照して説明したように、軌道予測モジュール1006は移動車両102が送信機アレイ110Dのどのコイル402の上を通過するか、および受信機アレイ306が送信機アレイ110Dと共振結合するであろう正確な時刻、を予測する。軌道予測モジュール1006はコイル電力管理モジュール1008に結合された出力を有し、どのコイル402をいつ起動するかについての情報を提供する。
【0069】
このコイル電力管理モジュール1008は軌道予測モジュール1006に結合され、タイミング情報を受信する。コイル電力管理モジュール1008は、コイル402をいつ起動するか、またどのコイル402を起動するか、を制御する。コイル電力管理モジュール1008は送信機コイル制御信号を発生し、それを信号線608を介して送信機アレイ110に出力する。信号線608は1つのみを図示しているが、当業者にはわかるように、コイル電力管理モジュール1008は所与の時点で起動すべき送信機アレイ110の1つ以上のコイル402に信号を供給することができる。
【0070】
コイル整調モジュール1010は通信モジュール906並びにプロセッサおよび保存部908と結合され、移動車両102およびその受信機アレイ306についての情報を受信する。前述のように、送信機アレイ110のコイル402は受信機アレイ306のコイルへのエネルギー伝達を最適化するように整調される。コイル整調モジュール1010は信号線606を介して、送信機アレイ110の個別のコイル402に送られる制御信号を出力する。一実施例において、コイル整調モジュール1010は、場の強度とコイル402が共振する周波数とを変更する。例えば、送信機アレイ110のコイル402を動作させる周波数を10MHzとすることができる。別の一実施例においては、コイル整調モジュール1010は、一次および二次の共振キャパシタのリアクタンスがコイル402、510の寄生インダクタンスを打ち消すように、固有の回路伝達パラメータを調整する。更に別の一実施例においては、コイル整調モジュール1010は送信機回路602および受信機回路604の周波数とキャパシタンスを調節してエネルギー伝達を最適化し、かつ車種および送信機アレイ110のコイルL1と受信機アレイ306のコイルL2との間の推定間隔に基づいて回路602、604を調節する。
【0071】
安全モジュール1012は軌道予測モジュール1006および送信機アレイ110近傍における人間その他の対象物の存在を検知する他のセンサ(不図示)から情報を受信するように結合される。安全モジュール1012はこれらの入力に基づいて、送信機アレイ110の起動によって損傷を受ける可能性のあるものが送信機アレイ110の近傍にあるか否かを判断する。もしあれば、安全モジュール1012は制御信号を出力して、コイル電力管理モジュール1008が送信機アレイ110のコイル402を起動しないようにする
。安全モジュール1012の出力はコイル電力管理モジュール1008に結合される。
【0072】
<方法>
ここで図11Aおよび図11Bを参照して、本発明の一実施例によるエネルギー伝達方法を説明する。エネルギー伝達制御装置106が移動車両102からアクセス要求を受信する(ステップ1102)ことにより、プロセスが開始される。一実施例において、アクセス要求は移動車両102の車種についての情報、認可情報、および送信機アレイ110と移動車両102の受信機アレイ306との間の共振結合に影響するその他の情報を含む。一実施例において、移動車両102はエネルギー伝達制御装置106に接近しつつあるときに、無線にてアクセス要求をエネルギー伝達制御装置106に送信する。その後、移動車両102がエネルギー伝達受給を認可されているかどうかを判断する(ステップ1104)。認可されていない場合、ステップ1106に進み、エネルギー伝達制御装置106は移動車両102に認可されていない旨のメッセージを送る。メッセージに応じて、移動車両102はユーザに充電が認可されていない旨を表示することもできる。あるいはメッセージは完全に無視される。ステップ1106の後、プロセスが完了して終了となる。
【0073】
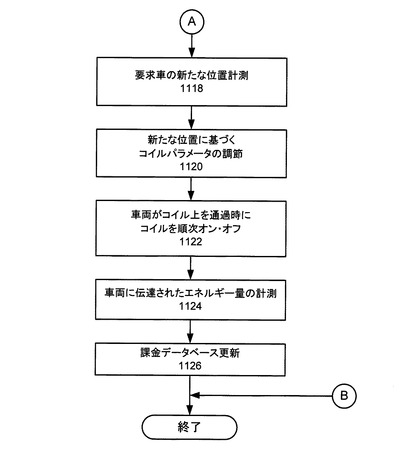
他方、ステップ1104で移動車両102に認可されているとされた場合、エネルギー伝達制御装置106は要求のあった車両の車種およびその他の情報を判断する(ステップ1108)。これは無線によるデータ問い合わせ、即ちエネルギー伝達制御装置106と移動車両102の充電モジュール302との間でのやり取りによって行うことができる。例えば、移動車両102は車両の車種が何であるかを提示してもよく、これによってエネルギー伝達制御装置106は送信機アレイ110と受信機アレイ306との間隔を推定する。移動車両102との通信において、受信機アレイ306の特定の特性についての情報および受信機アレイ306のどの属性が調節可能であるかについての情報を提供してもよい。充電制御装置902および充電モジュール302の双方がこの情報交換を利用して両アレイ110、306間でのエネルギー伝達を最適化することができる。次に、エネルギー伝達制御装置106は移動車両102の位置を求める(ステップ1110)。前に述べたように、この位置は位置センサ104A、104Bからの入力を利用してエネルギー伝達制御装置106側で計算してもよいし、あるいはまた、GPSシステム等を用いて移動車両102側が提供してもよい。次いで、エネルギー伝達制御装置106は移動車両102の軌道を予測する(ステップ1112)。この軌道とタイミングに基づいて、エネルギー伝達制御装置106は起動するコイル402を決定する(ステップ1114)。次いで、エネルギー伝達コイル402を起動しても安全であるかどうかを判断する(ステップ1116)。伝達コイル402は高周波数・高パワーであるので、人間その他の生物が送信機アレイ110近傍におり、送信機アレイを起動すると害を受ける可能性がある場合には、伝達コイル402を動作させないようにする。エネルギー伝達コイルの起動が安全でない場合には、ステップ1106に進み、エラーメッセージを送信する。他方、エネルギー伝達コイルを起動しても安全である場合は、プロセスを続行し、移動車両102の新たな位置を求める(ステップ1118)。次いで、新たな位置に基づいてコイルパラメータを調節する(ステップ1120)。次いで、エネルギー伝達制御装置106は、移動車両102がコイル上を通過するときに、コイルを順次オン・オフする(ステップ1122)。最後に、移動車両102に伝達されたエネルギー量を求め(ステップ1124)、課金データベースを更新する(ステップ1126)。
【0074】
以上の本発明の実施例の説明は例示と説明を目的としたものであって、本発明の全てを説明することを意図してはおらず、また本発明を開示した形態そのものに限ることを意図してもいない。以上の開示に照らして多くの変形や改変が可能である。本発明の範囲はこの詳細な説明によって限定されるものではなく、本願の請求の範囲によって定義される。この技術分野に精通した者には明らかであるが、本発明の思想即ち本質的特徴を逸脱することなく、別の具体的諸形態で本発明を実施することができる。同様に、モジュール、ル
ーチン、特徴、属性、方法論、およびその他の態様の具体的な名称や区分は必須のものではなく、即ち特に重要な意味を有するものではなく、本発明やその特徴を実施する機構は異なる名称、区分および/または形式を有してもよい。更に、当業者には明らかなことであるが、本発明のモジュール、ルーチン、特徴、属性、方法論、およびその他の態様はソフトウエア、ハードウエア、ファームウエア、またはこれら3つの任意の組み合わせによって実施することができる。また、モジュールを例とする本発明の要素がソフトウエアとして実施される場合には、該要素を単独のプログラムとして、より大きなプログラムの一部として、複数の別々のプログラムとして、静的あるいは動的にリンクされたライブラリとして、カーネルをロード可能なモジュールとして、デバイスドライバとして、および/またはコンピュータプログラム技術者に現在あるいは将来知られるその他の手段として実施される。また、本発明の実施は何らかの特定のプログラム言語、特定のオペレーティングシステム、特定の環境に限られるものではない。従って、本発明の開示は例示を目的としており、請求の範囲に記載される本発明の範囲を限定するものではない。
【符号の説明】
【0075】
100 エネルギー伝達システム
102 移動車両
104a、104b 位置センサ
106 エネルギー伝達制御装置
108 GPSシステム
110 送信機アレイ
112 道路
200 エネルギー伝達システム
202 信号機
204 停止線
206 道路
302 充電モジュール
306 受信機アレイ
320、322、324 信号線
402 コイル
502 道路
504、506、510 コイル
606、608 信号線
【特許請求の範囲】
【請求項1】
複数のコイルを有する送信機アレイであって、前記複数のコイルは道路を横切って配列されており、その各々を選択的に動作させることおよび整調することが可能なコイルである送信機アレイと、
前記送信機アレイと結合され、コイル電力管理モジュールと軌道予測モジュールとを有するエネルギー伝達制御装置であって、前記軌道予測モジュールは車両の軌道を求め、前記コイル電力管理モジュールは車両が前記複数のコイルのうちの1つ以上のコイルと共振結合するときに前記複数のコイルのうちの該1つ以上のコイルを選択的に起動し、前記軌道予測モジュールは前記コイル電力管理モジュールに軌道情報を提供するように結合され、前記コイル電力管理モジュールは前記複数のコイルに結合されているエネルギー伝達制御装置と、
を備える電気エネルギーを車両に伝達するシステム。
【請求項2】
前記送信機アレイは少なくとも2列(縦列)および少なくとも2行(横列)のコイルを含む、
請求項1に記載のシステム。
【請求項3】
前記エネルギー伝達制御装置は移動車両から認可情報を受信するように結合されたアクセス認可モジュールを含み、該アクセス認可モジュールは前記コイル電力管理モジュールに結合されて、受信された認可情報が有効である場合に前記コイル電力管理モジュールが送信機アレイに電力供給することを許容する認可信号を供給する、
請求項1または2に記載のシステム。
【請求項4】
前記エネルギー伝達制御装置は移動車両の位置を計測する位置計測モジュールを含み、該位置計測モジュールの出力は前記軌道予測モジュールに結合されて位置情報を提供する、
請求項1〜3のいずれかに記載のシステム。
【請求項5】
位置センサを更に含み、該位置センサは移動車両の位置を検出し、該位置センサは位置計測モジュールに結合される、
請求項4記載のシステム。
【請求項6】
移動装置と通信して移動装置からリアルタイム位置情報を受信する通信モジュールを更に有し、該通信モジュールは前記位置計測モジュールに結合されて該リアルタイム位置情報を提供する、
請求項4記載のシステム。
【請求項7】
前記軌道予測モジュールは移動車両の位置情報を受信し、該移動車両の位置情報を用いて、前記送信機アレイの複数のコイルのうちどのコイル上を該移動車両が通過するか、および該移動装置の受信機アレイが送信機アレイと共振結合する正確な時刻、を含む該移動車両の今後の道筋を求める、
請求項1〜6のいずれかに記載のシステム。
【請求項8】
エネルギー伝達制御装置はコイル整調モジュールを含み、該コイル整調モジュールは前記送信機アレイの複数のコイルに結合されて送信機共振制御信号を供給する、
請求項1〜7のいずれかに記載のシステム。
【請求項9】
前記コイル整調モジュールは通信モジュールに結合され、移動車両およびその受信機アレイについての情報を受信し、かつ該コイル整調モジュールは場の強度、周波数、キャパ
シタンス、およびインダクタンスのうちの少なくとも一つを変更して前記送信機アレイからのエネルギー伝達を最適化する、
請求項8記載のシステム。
【請求項10】
前記コイル整調モジュールは、一次および二次共振キャパシタのリアクタンスが前記送信機アレイの複数のコイルの寄生インダクタンスを打ち消すように、回路の伝達パラメータを調節する、
請求項8または9に記載のシステム。
【請求項11】
前記移動車両は複数のコイルを有する受信機アレイを備え、該受信機アレイのコイルは送信機アレイのコイルの面積のおよそ半分である、
請求項1〜10のいずれかに記載のシステム。
【請求項12】
前記送信機アレイの複数のコイルはおよそ2メートル×2メートルであり、前記受信機アレイの複数のコイルはおよそ1メートル×1メートルである、
請求項11記載のシステム。
【請求項13】
前記軌道予測モジュールと前記送信機アレイの近傍の対象物を検知する別のセンサとから情報を受信するように結合された安全モジュールを備え、該安全モジュールは該対象物の検知および前記送信機アレイ上の移動車両の軌道に応じて前記コイル電力管理モジュールを動作させないようにするものである、
請求項1〜12のいずれかに記載のシステム。
【請求項14】
前記移動車両は車両充電制御装置と複数のコイルと有する受信機アレイとを備え、該車両充電制御装置は受信機共振制御信号を発生して前記複数のコイルのうちの少なくとも1つのコイルの動作パラメータを制御する、
請求項1〜13のいずれかに記載のシステム。
【請求項15】
前記受信機共振制御信号は前記複数のコイルのうちの少なくとも1つのコイルに関連する回路のキャパシタンス値を指定することを特徴とする請求項14記載のシステム。
【請求項16】
エネルギー伝達制御装置において移動車両からアクセス要求を受信することと、
前記移動車両の軌道を予測することと、
前記移動車両の軌道に基づいて起動すべき送信機アレイ内のコイルを決定することと、
前記移動車両の位置に基づいてコイルパラメータを調節することと、
前記移動車両が前記コイル上を通過する際に前記コイルを起動することと、
を含む車両に電力を伝達する方法。
【請求項17】
前記アクセス要求は認可情報を含み、前記エネルギー伝達制御装置は前記コイルを起動する前に、前記車両がエネルギー伝達受給の認可を受けているかどうかを判断する、
請求項16に記載の方法。
【請求項18】
前記移動車両の車種およびその他の共振パラメータを判断することを含む、
請求項16または17に記載の方法。
【請求項19】
前記移動車両の軌道の予測は移動装置の位置を求めることを含む、
請求項16〜18のいずれかに記載の方法。
【請求項20】
前記コイルを起動しても安全かどうか判断することを含み、前記コイルを起動するステップは該コイルを起動しても安全である場合にのみ実行される、
請求項16〜19のいずれかに記載の方法。
【請求項21】
コイルパラメータの調節は、前記送信機アレイのコイルに関連する回路の周波数、キャパシタンス、インダクタンス、コイル電圧振幅、コイル電流振幅、および場の強度のうちの少なくとも1つを変更することを含む、
請求項16〜20のいずれかに記載の方法。
【請求項22】
前記移動車両は複数のコイルを有する受信機アレイを備え、コイルパラメータの調節は、前記受信機アレイのコイルに関連する回路の周波数、キャパシタンス、インダクタンス、コイル電圧振幅、コイル電流振幅、および場の強度のうちの少なくとも1つを変更することを含む、
請求項16〜21のいずれかに記載の方法。
【請求項23】
コイルパラメータの調整は一次および二次共振キャパシタのリアクタンスが前記送信機アレイの複数のコイルの寄生インダクタンスを打ち消すように、固有の回路伝達パラメータを調節することを含む、
請求項16〜22のいずれかに記載の方法。
【請求項24】
前記移動車両に伝達されたエネルギー量を計測することと、
該伝達されたエネルギー量に基づいて課金モジュールを更新することと、を含む、
請求項16〜23のいずれかに記載の方法。
【請求項1】
複数のコイルを有する送信機アレイであって、前記複数のコイルは道路を横切って配列されており、その各々を選択的に動作させることおよび整調することが可能なコイルである送信機アレイと、
前記送信機アレイと結合され、コイル電力管理モジュールと軌道予測モジュールとを有するエネルギー伝達制御装置であって、前記軌道予測モジュールは車両の軌道を求め、前記コイル電力管理モジュールは車両が前記複数のコイルのうちの1つ以上のコイルと共振結合するときに前記複数のコイルのうちの該1つ以上のコイルを選択的に起動し、前記軌道予測モジュールは前記コイル電力管理モジュールに軌道情報を提供するように結合され、前記コイル電力管理モジュールは前記複数のコイルに結合されているエネルギー伝達制御装置と、
を備える電気エネルギーを車両に伝達するシステム。
【請求項2】
前記送信機アレイは少なくとも2列(縦列)および少なくとも2行(横列)のコイルを含む、
請求項1に記載のシステム。
【請求項3】
前記エネルギー伝達制御装置は移動車両から認可情報を受信するように結合されたアクセス認可モジュールを含み、該アクセス認可モジュールは前記コイル電力管理モジュールに結合されて、受信された認可情報が有効である場合に前記コイル電力管理モジュールが送信機アレイに電力供給することを許容する認可信号を供給する、
請求項1または2に記載のシステム。
【請求項4】
前記エネルギー伝達制御装置は移動車両の位置を計測する位置計測モジュールを含み、該位置計測モジュールの出力は前記軌道予測モジュールに結合されて位置情報を提供する、
請求項1〜3のいずれかに記載のシステム。
【請求項5】
位置センサを更に含み、該位置センサは移動車両の位置を検出し、該位置センサは位置計測モジュールに結合される、
請求項4記載のシステム。
【請求項6】
移動装置と通信して移動装置からリアルタイム位置情報を受信する通信モジュールを更に有し、該通信モジュールは前記位置計測モジュールに結合されて該リアルタイム位置情報を提供する、
請求項4記載のシステム。
【請求項7】
前記軌道予測モジュールは移動車両の位置情報を受信し、該移動車両の位置情報を用いて、前記送信機アレイの複数のコイルのうちどのコイル上を該移動車両が通過するか、および該移動装置の受信機アレイが送信機アレイと共振結合する正確な時刻、を含む該移動車両の今後の道筋を求める、
請求項1〜6のいずれかに記載のシステム。
【請求項8】
エネルギー伝達制御装置はコイル整調モジュールを含み、該コイル整調モジュールは前記送信機アレイの複数のコイルに結合されて送信機共振制御信号を供給する、
請求項1〜7のいずれかに記載のシステム。
【請求項9】
前記コイル整調モジュールは通信モジュールに結合され、移動車両およびその受信機アレイについての情報を受信し、かつ該コイル整調モジュールは場の強度、周波数、キャパ
シタンス、およびインダクタンスのうちの少なくとも一つを変更して前記送信機アレイからのエネルギー伝達を最適化する、
請求項8記載のシステム。
【請求項10】
前記コイル整調モジュールは、一次および二次共振キャパシタのリアクタンスが前記送信機アレイの複数のコイルの寄生インダクタンスを打ち消すように、回路の伝達パラメータを調節する、
請求項8または9に記載のシステム。
【請求項11】
前記移動車両は複数のコイルを有する受信機アレイを備え、該受信機アレイのコイルは送信機アレイのコイルの面積のおよそ半分である、
請求項1〜10のいずれかに記載のシステム。
【請求項12】
前記送信機アレイの複数のコイルはおよそ2メートル×2メートルであり、前記受信機アレイの複数のコイルはおよそ1メートル×1メートルである、
請求項11記載のシステム。
【請求項13】
前記軌道予測モジュールと前記送信機アレイの近傍の対象物を検知する別のセンサとから情報を受信するように結合された安全モジュールを備え、該安全モジュールは該対象物の検知および前記送信機アレイ上の移動車両の軌道に応じて前記コイル電力管理モジュールを動作させないようにするものである、
請求項1〜12のいずれかに記載のシステム。
【請求項14】
前記移動車両は車両充電制御装置と複数のコイルと有する受信機アレイとを備え、該車両充電制御装置は受信機共振制御信号を発生して前記複数のコイルのうちの少なくとも1つのコイルの動作パラメータを制御する、
請求項1〜13のいずれかに記載のシステム。
【請求項15】
前記受信機共振制御信号は前記複数のコイルのうちの少なくとも1つのコイルに関連する回路のキャパシタンス値を指定することを特徴とする請求項14記載のシステム。
【請求項16】
エネルギー伝達制御装置において移動車両からアクセス要求を受信することと、
前記移動車両の軌道を予測することと、
前記移動車両の軌道に基づいて起動すべき送信機アレイ内のコイルを決定することと、
前記移動車両の位置に基づいてコイルパラメータを調節することと、
前記移動車両が前記コイル上を通過する際に前記コイルを起動することと、
を含む車両に電力を伝達する方法。
【請求項17】
前記アクセス要求は認可情報を含み、前記エネルギー伝達制御装置は前記コイルを起動する前に、前記車両がエネルギー伝達受給の認可を受けているかどうかを判断する、
請求項16に記載の方法。
【請求項18】
前記移動車両の車種およびその他の共振パラメータを判断することを含む、
請求項16または17に記載の方法。
【請求項19】
前記移動車両の軌道の予測は移動装置の位置を求めることを含む、
請求項16〜18のいずれかに記載の方法。
【請求項20】
前記コイルを起動しても安全かどうか判断することを含み、前記コイルを起動するステップは該コイルを起動しても安全である場合にのみ実行される、
請求項16〜19のいずれかに記載の方法。
【請求項21】
コイルパラメータの調節は、前記送信機アレイのコイルに関連する回路の周波数、キャパシタンス、インダクタンス、コイル電圧振幅、コイル電流振幅、および場の強度のうちの少なくとも1つを変更することを含む、
請求項16〜20のいずれかに記載の方法。
【請求項22】
前記移動車両は複数のコイルを有する受信機アレイを備え、コイルパラメータの調節は、前記受信機アレイのコイルに関連する回路の周波数、キャパシタンス、インダクタンス、コイル電圧振幅、コイル電流振幅、および場の強度のうちの少なくとも1つを変更することを含む、
請求項16〜21のいずれかに記載の方法。
【請求項23】
コイルパラメータの調整は一次および二次共振キャパシタのリアクタンスが前記送信機アレイの複数のコイルの寄生インダクタンスを打ち消すように、固有の回路伝達パラメータを調節することを含む、
請求項16〜22のいずれかに記載の方法。
【請求項24】
前記移動車両に伝達されたエネルギー量を計測することと、
該伝達されたエネルギー量に基づいて課金モジュールを更新することと、を含む、
請求項16〜23のいずれかに記載の方法。
【図1】


【図2】
【図3】
【図4A】
【図4B】
【図4C】
【図5A】
【図5B】
【図5C】
【図5D】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11A】
【図11B】
【図2】
【図3】
【図4A】
【図4B】
【図4C】
【図5A】
【図5B】
【図5C】
【図5D】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11A】
【図11B】
【公開番号】特開2011−160653(P2011−160653A)
【公開日】平成23年8月18日(2011.8.18)
【国際特許分類】
【出願番号】特願2011−17093(P2011−17093)
【出願日】平成23年1月28日(2011.1.28)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年8月18日(2011.8.18)
【国際特許分類】
【出願日】平成23年1月28日(2011.1.28)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]