
移動軌跡表示装置
【課題】縮尺が小さくても、走行軌跡が見づらくなりにくく、且つ、実際の軌跡も判断しやすい軌跡表示装置を提供する。
【解決手段】表示器10の地図上において、一定間隔軌跡地点Dおよび方向変化地点Eに軌跡図形を表示する。一定間隔軌跡地点Dは、縮尺によって実間隔が定まる一定実間隔毎の地点であるが、その一定実間隔は縮尺が小さいほど長くなる。そのため、縮尺が小さい場合でも、表示器10上において一定間隔軌跡地点に対応する軌跡図形の間隔が狭くなることが抑制される。その結果、縮尺が小さくても走行軌跡は見づらくなりにくい。また、一定間隔軌跡地点Dだけでなく方向変化地点Eにも軌跡図形を表示するので、実際の軌跡も判断しやすい。
【解決手段】表示器10の地図上において、一定間隔軌跡地点Dおよび方向変化地点Eに軌跡図形を表示する。一定間隔軌跡地点Dは、縮尺によって実間隔が定まる一定実間隔毎の地点であるが、その一定実間隔は縮尺が小さいほど長くなる。そのため、縮尺が小さい場合でも、表示器10上において一定間隔軌跡地点に対応する軌跡図形の間隔が狭くなることが抑制される。その結果、縮尺が小さくても走行軌跡は見づらくなりにくい。また、一定間隔軌跡地点Dだけでなく方向変化地点Eにも軌跡図形を表示するので、実際の軌跡も判断しやすい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両等の移動体に搭載され、或いは、使用者に携帯されて位置が移動し、その移動の軌跡を表示する移動軌跡表示装置に関する。
【背景技術】
【0002】
移動軌跡表示装置として特許文献1のものが知られている。特許文献1では、第1の走行距離(=160m)毎に自車位置を走行軌跡メモリに書き込んで走行軌跡を記憶し、その走行軌跡を地図に重ねてディスプレイ画面に表示する。さらに、特許文献1では、進行方向が設定角度以上変化したときは、自車位置が前回メモリに書き込んだ自車位置から第1の走行距離(=160m)離れていなくても、第2の走行距離(=40m)離れていれば、自車位置を走行軌跡メモリに書き込む。そのため、道路が狭い間隔で入り組んでいる地域においては狭い間隔で走行軌跡の書き込み、表示を行なうことになるので、道路が狭い間隔で入り組んでいる地域でも、走行軌跡を正確に表示することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平8−278150号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、ディスプレイに表示している地図の縮尺によらず、進行方向が設定角度以上変化したときは、第1の走行距離よりも狭い第2の走行距離を基準として自車位置を走行軌跡メモリに書き込み、走行軌跡を表示している。そのため、縮尺が小さい場合には、走行軌跡を示す丸印が密に表示されることになってしまい、見づらくなってしまう恐れがある。
【0005】
ここで、第2の走行距離を基準とせずに、それよりも長い第1の走行距離を基準とすれば、走行軌跡を示す丸印の間隔が広くなるので、見づらさは軽減される。しかし、この場合、走行軌跡を示す丸印から、実際の軌跡を判断することが難しくなってしまう。
【0006】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、縮尺が小さくても、走行軌跡が見づらくなりにくく、且つ、実際の軌跡も判断しやすい軌跡表示装置を提供することにある。
【課題を解決するための手段】
【0007】
その目的を達成するための請求項1記載の発明は、表示器を有し、その表示器に移動軌跡を表示する軌跡表示装置であって、現在地点を逐次検出する現在地点検出手段と、その現在地点検出手段で逐次検出した現在地点を記憶する地点記憶部と、縮尺が小さいほど実間隔が長くなるが、縮尺によってその実間隔が定まる一定実間隔毎の地点を示す一定実間隔軌跡地点と、進行方向が変化した地点である方向変化地点とを、前記地点記憶部に記憶されている地点から決定する地点決定手段とを備え、前記表示器に表示する移動軌跡として、前記地点決定手段で決定した一定実間隔軌跡地点および方向変化地点に軌跡図形を表示させることを特徴とする。
【0008】
このようにすれば、表示器には、一定実間隔軌跡地点および方向変化地点に軌跡図形が表示される。一定実間隔軌跡地点は、縮尺によって実間隔が定まる一定実間隔毎の地点であるが、その一定実間隔は縮尺が小さいほど長くなる。そのため、縮尺が小さい場合でも、表示器上において一定実間隔軌跡地点に対応する軌跡図形の間隔が狭くなることが抑制される。その結果、縮尺が小さくても、走行軌跡は見づらくなりにくい。しかも、進行方向が変化した地点である方向変化地点にも軌跡図形が表示されるので、実際の軌跡も判断しやすい。
【0009】
請求項2に係る発明は、前記地点決定手段は、前記地点記憶部に記憶されている地点のうち、前記一定実間隔軌跡地点よりも狭い間隔毎の地点を前記方向変化地点の候補地点とし、連続する3点の候補地点から定まるその3点のうちの中央の候補地点における進行方向の変化から、その中央の候補地点が前記方向変化地点に該当するか否かを判断することを特徴とする。
【0010】
このようにすれば、一定実間隔軌跡地点よりも狭い実間隔毎の候補地点から方向変化地点が決定されるので、方向変化地点が、実際の軌跡において進行方向が変化した地点に近くなる。よって、軌跡図形から判断できる軌跡が、実際の軌跡に近くなる。
【0011】
請求項3に係る発明は、前記地点決定手段は、基準縮尺以下の縮尺では、前記方向変化地点を決定しないことを特徴とする。
【0012】
このようにすると、基準縮尺以下の縮尺では、方向変化地点に対応する軌跡図形は表示せず、一定実間隔軌跡地点にのみ軌跡図形を表示することになる。そのため、軌跡図形は、実際の軌跡を粗い精度で示すものとなる。しかし、縮尺が小さい場合、地図自体も粗い形状となるので、一定実間隔軌跡地点にのみ軌跡図形を表示しても、その地図の粗さに則した軌跡の判断は可能である。また、方向変化地点を決定しないことから、処理が簡単になる利点がある。
【0013】
なお、請求項4に記載の発明では、地点決定手段は、一定実空間軌跡地点を決定した縮尺よりも一段大きな縮尺における一定実間隔毎の地点から方向変化地点を決定することとした。これにより、方向変化をしていない部分は比較的粗く走行軌跡が表示される一方、方向変化地点は比較的密に走行軌跡が表示されるようになる。つまり、車両の進行方向が比較的判断しにくい方向変化地点の地点表示がそれ以外の地点と比べて詳細になされるので、縮尺が小さくても、走行軌跡は見づらくなりにくく、しかも実際の軌跡も判断しやすくなる。
【0014】
上記目的を達成するための請求項5に記載の発明は、表示器を有し、その表示器に移動軌跡を表示する軌跡表示装置であって、現在地点を逐次検出する現在地点検出手段と、その現在地点検出手段で逐次検出した現在地点を記憶する地点記憶部と、走行軌跡が見づらくなりにくく、且つ、軌跡も判断しやすい表示器上の間隔として定められた一定表示間隔毎の地点を示す一定表示間隔軌跡地点を、前記地点記憶部に記憶されている地点から決定する地点決定手段とを備え、前記表示器に表示する移動軌跡として、前記地点決定手段で決定した一定表示間隔軌跡地点に軌跡図形を表示させることを特徴とする。
【0015】
このようにすれば、表示器には、一定表示間隔軌跡地点に軌跡図形が表示される。一定表示間隔軌跡地点は、走行軌跡がみづらくなりにくく、且つ、軌跡も判断しやすい表示器上の間隔として定められた一定表示間隔(例えば「4ドット」等)毎の地点である。そのため、縮尺が小さい場合でも、走行軌跡は見づらくなりにくく、且つ、実際の軌跡も判断しやすい。
【0016】
なお、地点決定手段は、表示器に表示している地図の縮尺から一定表示間隔に相当する実距離を逆算し、その逆算した実距離を用いて、地点記憶部に記憶されている地点から一定表示間隔軌跡地点を決定すればよい。
【0017】
請求項6に係る発明は、前記地点決定手段は、前記一定表示間隔軌跡地点を決定するに当たり、進行方向が変化した地点である方向変化地点を中心とした所定範囲外における一定表示間隔を、その所定範囲内における一定表示間隔よりも長くすることを特徴とする。これにより、所定範囲内では一定表示間隔軌跡地点数を密とする一方、所定範囲外では一定表示間隔軌跡地点数を疎とすることが可能となる。なお、方向変化地点を一定表示間隔軌跡地点の1つとするとよい。ちなみに、一定表示間隔は、軌跡の全範囲における一定を意味するのではなく、ある範囲での一定を意味する。
【0018】
なお、具体的には、請求項7に係る発明のように、前記地点決定手段は、前記一定表示間隔軌跡地点を決定するに当たり、前記方向変化地点を中心とした所定範囲内における一定表示間隔を維持し、前記所定範囲外における一定表示間隔を前記所定範囲内における一定表示間隔よりも長くしてもよい。あるいは、請求項8に係る発明のように、前記地点決定手段は、前記一定表示間隔軌跡地点を決定するに当たり、前記方向変化地点を中心とした所定範囲外における一定表示間隔を維持し、前記所定範囲内における一定表示間隔を前記所定範囲外における一定表示間隔よりも短くしてもよい。
【0019】
請求項9に係る発明は、前記地点決定手段は、前記地点記憶部に記憶されている地点のうち、前記一定表示間隔軌跡地点よりも狭い間隔毎の地点を前記方向変化地点の候補地点とし、連続する3点の候補地点から定まるその3点のうちの中央の候補地点における進行方向の変化から、その中央の候補地点が前記方向変化地点に該当するか否かを判断することを特徴とする。
【0020】
このようにすれば、上記請求項2に記載の発明と同様に、一定表示間隔軌跡地点よりも狭い間隔毎の候補地点から方向変化地点が決定されるので、方向変化地点が、実際の軌跡において進行方向が変化した地点に近くなる。よって、軌跡図形から判断できる軌跡が、実際の軌跡に近くなる。
【図面の簡単な説明】
【0021】
【図1】本発明の軌跡表示装置の機能を備えたナビゲーション装置の概略構成を示すブロック図である。
【図2】図1の制御回路8の機能を示す機能ブロック図である。
【図3】連続する候補地点を3点用いて、その中央の候補地点が方向変化地点に該当するか否かを決定する方法を説明する図である。
【図4】第1実施形態における軌跡図形の表示例である。
【図5】図4の表示例における軌跡図形が、一定間隔軌跡地点Dに対応するか、方向変化地点Eに対応するかを示した図である。
【図6】図4の表示例を説明するための図である。
【図7】第1実施形態の表示例と比較するための比較例示す図である。
【図8】第2実施形態において軌跡図形を表示するための内部処理を説明するための図である。
【図9】第2実施形態における軌跡図形の表示例(図10)の比較例を示す図である。
【図10】第2実施形態における軌跡図形の表示例である。
【図11】第3実施形態における軌跡図形の表示例である。
【図12】第3実施形態における軌跡図形の別の表示例である。
【図13】第4実施形態における軌跡図形の表示例である。
【発明を実施するための形態】
【0022】
(第1実施形態)
まず、本発明の第1実施形態を図面に基づいて説明する。第1実施形態は、本発明の軌跡表示装置の機能を備えたナビゲーション装置である。図1は、このナビゲーション装置の概略構成を示すブロック図である。
【0023】
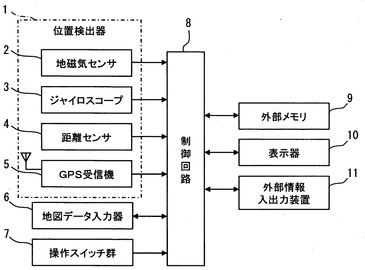
同図に示すように、第1実施形態のカーナビゲーション装置は、位置検出器1、地図データ入力器6、操作スイッチ群7、外部メモリ9、表示器10、外部情報入出力装置11及びこれらに接続された制御回路8などを備えている。
【0024】
制御回路8は通常のコンピュータとして構成されており、内部には周知のCPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインが備えられている。ROMには、制御回路8が実行するためのプログラムが書き込まれており、このプログラムに従ってCPU等が所定の演算処理を実行する。
【0025】
位置検出器1は、いずれも周知の地磁気センサ2、ジャイロスコープ3、距離センサ4、及び衛星からの電波に基づいて車両の位置を測定するGPS(Global Positioning System)のためのGPS受信機5を有している。
【0026】
地図データ入力器6は、道路データ、背景データ及び文字データを含む地図データを入力するための装置である。地図データを記憶する記憶媒体としては、たとえば、ハードディスク、フラッシュメモリ、光ディスク(DVD−ROMなど)を用いることができる。
【0027】
また、地図データは、外部のサーバから通信によって取得し、後述する外部メモリ9などに格納することも可能である。この場合、外部メモリ9に格納された地図データを用いて、車両周辺の地図表示、表示地図の尺度変更、経路案内等の各種のナビゲーション機能を実施することができる。これらの機能は、主に制御回路8によって各種の演算処理がなされることによって実行される。
【0028】
操作スイッチ群7は、例えば、後述する表示器10と一体になったタッチスイッチもしくはメカニカルなスイッチ等によって構成され、各種入力に使用される。例えば、操作スイッチ群7を用いて、目的地の位置を入力することが可能であり、この場合、ナビゲーション装置は、現在地点からその目的地までの最適なルートを自動的に選択して案内ルートを形成し表示する、いわゆるルート案内機能を備えている。このような自動的に最適な案内ルートを設定する手法として、例えば周知のダイクストラ法等の手法が知られている。また、ユーザは、操作スイッチ群7を用いて、表示器10に表示されている地図の縮尺を変更する操作や、走行軌跡を表示させる操作を行うこともできる。
【0029】
外部メモリ9は、例えば、メモリカードやハードディスク等の記憶媒体からなる。この外部メモリ9には、ユーザによって記憶されたテキストデータ、画像データ、音声データ、走行軌跡データ等の各種データが記憶される。さらに、車両用ナビゲーション装置が、上述したように、地図データを外部のサーバから取得する場合には、その地図データを格納したりする。
【0030】
表示器10は、例えば、液晶ディスプレイによって構成され、表示器10の画面には車両の現在地点に対応しつつ、その進行方位を表示する自車両マーク、及び、地図データ入力器6より入力された地図データによって生成される車両周辺の道路地図を表示することができる。さらに、目的地が設定された場合、この道路地図上には、現在地点から目的地までの案内ルートを重ねて表示することが出来る。また、詳しくは後述するが、走行軌跡を示す軌跡図形を地図に重畳表示することもできる。
【0031】
外部情報入出力装置11は、道路に敷設されたビーコンや各地のFM放送局を介して、VICSセンタから配信される道路交通情報等の情報を受信したり、必要に応じて車両側から外部へ情報を送信したりする装置である。受信した情報は、制御回路8で処理され、例えば、渋滞情報や規制情報等は表示器10に表示される道路地図上に重ねて表示される。
【0032】
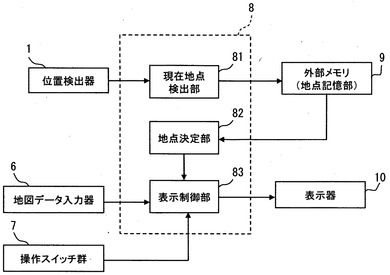
次に、制御回路8について説明する。図2は、制御回路8の機能を示す機能ブロック図であり、制御回路8は、CPUがRAMの一時記憶機能を利用しつつ、ROMに書き込まれたプログラムを実行することで、図2に示す現在地点検出部81、地点決定部82、表示制御部83として機能する。なお、図2には示していないが、制御回路8は、目的地設定部、経路探索部、経路案内部等も備えている。
【0033】
現在地点検出部81は、位置検出器1から入力される信号に基づいて、車両の現在地点を逐次決定する。なお、位置検出器1を構成する地磁気センサ2、ジャイロスコープ3、距離センサ4、GPS受信機5は、各々が性質の異なる誤差を持っているため、各々からの信号を補完しながら現在地点を逐次検出する。すなわち、GPSによる電波航法と、地磁気センサ、ジャイロスコープ3及び距離センサ4による自立航法を組み合わせたハイブリッド航法により、車両の現在地点(座標)を決定する。なお、各センサの精度によっては、位置検出器1を上述した内の一部で構成してもよく、更に、図示しないステアリングの回転センサ、各転動輪の車速センサ等を用いてもよい。また、現在地点検出部81では、現在地点に加えて進行方位も決定する。
【0034】
そして、現在地点検出部81は、現在地点の検出を、制御回路8の性能によって定まる所定の処理周期(たとえば、200ms)で行ない、検出した現在地点を、本実施形態において請求項の地点記憶部として機能する外部メモリ9に逐次記憶する。
【0035】
地点決定部82は、外部メモリ9に記憶されている現在地点、すなわち、過去に走行した地点から、表示器10に軌跡図形を表示する地点である一定実間隔軌跡地点と方向変化地点とを決定する。これら一定実間隔軌跡地点と方向変化地点とを決定する処理は、操作スイッチ群7から軌跡表示指示が行われたときに行ってもよいし、その指示の有無によらず、一定の走行距離毎に自動的に行ってもよい。
【0036】
一定実間隔軌跡地点は、縮尺によって実間隔が定まる一定実間隔毎の地点である。ここで、実間隔は表示上の間隔ではなく実際の間隔であり、一定実間隔は、縮尺が小さくなるにつれて、段階的に長くなるように設定されている。たとえば、一定実間隔は、縮尺が1/5000〜1/2万のときは50m、縮尺が1/4万〜1/8万のときは100mに設定される。なお、縮尺1/5000、1/2万、1/4万、1/8万は、それぞれ、表示上の単位スケールが50m、200m、400m、800mとなる。
【0037】
方向変化地点は、車両の進行方向が変化した地点であり、外部メモリ9に記憶されている地点から、次のようにして決定する。まず、外部メモリ9に記憶されている地点から、一定実間隔軌跡地点よりも狭い間隔毎の地点を方向変化地点の候補地点とする。この候補地点は、本実施形態では、上記処理周期毎に記憶した全ての地点とする。ただし、これに限らず、処理周期毎に記憶した地点を1点おき、または複数点おきに候補地点としてもよい。また、一定実間隔よりも狭ければ、10mおき等、距離毎に候補地点を決定してもよい。
【0038】
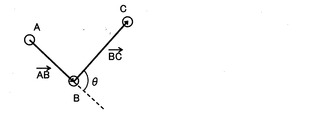
候補地点を決定したら、連続する候補地点を3点用い、図3に示すように、その3点のうちの中央の点Bと一方の端の点Aとによって定まるABベクトルが示す進行方向と、その3点のうちの中央の点Bと他方の端の点Cとによって定まるBCベクトルが示す進行方向との進行方向差(角度θ)が基準値よりも大きいときは、候補地点Bを方向変化地点とする。
【0039】
上記方向変化地点は、表示器10に表示されている地図の縮尺がどのような縮尺であるかによらずに決定することとしてもよいのであるが、本実施形態においては、地図の縮尺が基準縮尺以下では、方向変化地点は決定しない。この基準縮尺は、任意に設定すればよい。方向変化地点を決定しないと、その方向変化地点に対する軌跡図形は表示しないことになることから、軌跡図形は、実際の軌跡を粗い精度で示すものとなる。しかし、縮尺が小さくなると、地図自体も粗い形状となることから、軌跡図形も地図縮尺に則して粗いものでもよいことになる。また、縮尺が小さいにもかかわらず、多くの軌跡図形を表示してしまうと、軌跡図形同士の間隔が狭まり、地図が見づらくなってしまう。これらの点を考慮して、基準縮尺を適宜設定すればよい。
【0040】
表示制御部83は、表示器10の表示内容の制御を行う。たとえば、表示制御部83は、操作スイッチ群7からの入力信号に基づいて定まる縮尺の地図データを地図データ入力部6から読み出して、地図を表示器10に表示する。また、表示制御部83は、操作スイッチ群7から軌跡表示指示が行われた場合には、表示器10に表示している地図上において、地点決定部82で決定した一定間隔軌跡地点と方向変化地点を示す場所に軌跡図形を表示する。
【0041】
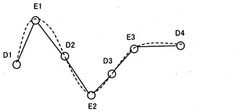
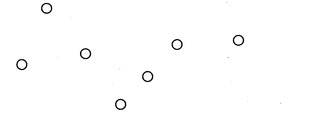
次に、上記軌跡図形の表示例を説明する。図4は本実施形態における軌跡図形の表示例である。この例では、軌跡図形として○が用いられている。もちろん、これに限らず、他の種々の図形(●、□など)を用いてもよい。また、図4には軌跡図形(○印)のみを示しているが、実際には、この図4に示される軌跡図形(○印)が表示器10に表示されている地図に重畳表示される。
【0042】
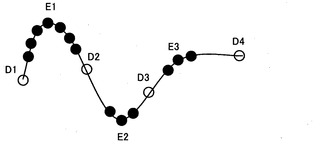
図5は、図4の表示例における軌跡図形(○印)が、それぞれ、一定実間隔軌跡地点Dに対応するか、方向変化地点Eに対応するかを示した図である。この図5では、黒丸が方向変化地点の候補地点を示している。なお、候補地点は、説明に必要な部分のみ示しているが、実際には、走行した経路全体にわたって記憶されている。
【0043】
この図5において、連続する3つの候補地点からその中央の候補地点における進行方向の変化を決定して、その中央の候補地点を方向変化地点とするか否かを決定していくと、E1、E2、E3が方向変化地点となる。一方、一定実間隔軌跡地点Dは、走行軌跡上の一定実間隔毎の点である。なお、走行軌跡上の実間隔は、外部メモリ9に記憶されている地点間の距離を積算することで算出する。このようにして決定した一定実間隔軌跡地点Dおよび方向変化地点Eに軌跡図形(○印)を表示したものが、先に示した図4である。
【0044】
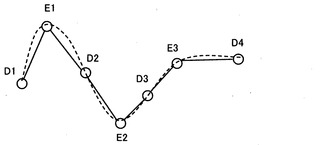
図6も、図4の表示例を説明するための図である。図6において、軌跡図形(○印)の位置は図4と同じである。また、実線は軌跡図形(○印)を直線で結んだ線、破線は実際の走行軌跡を示している。この図6の実線と破線との比較から分かるように、方向変化地点Eにも軌跡図形(○印)を表示することで、軌跡図形から判断できる軌跡が、実際の走行軌跡に近い形状となる。
【0045】
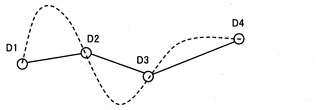
図7は、第1実施形態の表示例と比較するための比較例であり、方向変化地点Eには軌跡図形を示さず、一定実間隔軌跡地点にのみ軌跡図形を示した例である。また、実線は軌跡図形を直線で結んだ線、破線は実際の走行軌跡を示している。この図7の実線と破線との比較から分かるように、一定実間隔軌跡地点にのみ軌跡図形を表示すると、軌跡図形から判断できる軌跡と実際の走行軌跡との乖離が大きくなってしまい、軌跡図形から実際の走行軌跡を判断することが困難になる。
【0046】
なお、一定実間隔軌跡地点のみに軌跡図形を表示するとしても、一定実間隔を狭くすれば、軌跡図形から実際の走行軌跡を判断しやすくなる。しかしながら、図4〜図7では、軌跡図形のみ示しているが、実際には、軌跡図形は、道路、地形、建物など、種々の情報が描かれた地図に重畳表示される。そのため、軌跡図形の数が多くなると、地図全体としてごちゃごちゃした印象となってしまうので、軌跡図形の数を少なくすることが好ましいのである。よって、一定実間隔軌跡地点のみに軌跡図形を表示するのではなく、本実施形態のように、方向変化地点にも軌跡図形を表示することによって、一定実間隔軌跡地点の数を少なくすることが好ましいのである。
【0047】
以上、説明した第1実施形態によれば、表示器10には、一定実間隔軌跡地点Dおよび方向変化地点Eに軌跡図形が表示される。一定実間隔軌跡地点Dは、縮尺によって実間隔が定まる一定実間隔毎の地点であるが、その一定実間隔は縮尺が小さいほど長くなる。そのため、縮尺が小さい場合でも、表示器10上において一定実間隔軌跡地点に対応する軌跡図形の間隔が狭くなることが抑制される。その結果、縮尺が小さくても、走行軌跡は見づらくなりにくい。しかも、方向変化地点Eにも軌跡図形が表示されるので、実際の軌跡も判断しやすい。なお、このように実際の軌跡が判断しやすくなると、オフロードを走行した軌跡を確認する際に特に有用である。
【0048】
(第2実施形態)
次に、本発明の第2実施形態を説明する。第2実施形態が第1実施形態と相違する点は、第1実施形態では、制御回路8の処理周期毎に記憶した全ての地点を方向変化地点の候補地点としていたが、第2実施形態では、表示器10に実際に表示している地図の縮尺よりも大きな縮尺に対して設定されている一定実間隔毎の地点を方向変化地点の候補地点とする。この点において第2実施形態は第1実施形態と相違するのみであり、その他の点は第1実施形態と同じである。
【0049】
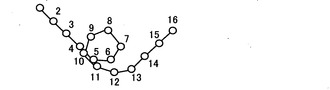
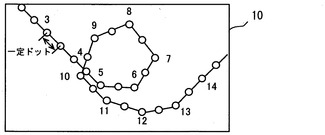
図8は、第2実施形態において軌跡図形を表示するための内部処理を説明するための図であって、実際に表示している地図の縮尺によって定まる一定実間隔よりも一段階狭い一定実間隔毎の地点に軌跡図形を示している。後者(一段狭い一定実間隔毎の地点に軌跡図形を表示する場合)から前者(後者に比べ一段広い一定実間隔毎の地点に軌跡図形を表示する場合)を見れば、前者は軌跡図形を間引いて表示していると言える。一方、前者から後者を見れば、後者は、地点がより忠実に表示されており、地点がより一層密に表示されていると言える。また、図8において、数字は、地点が記憶された順番を示している。図8から、車両は、4の軌跡図形の地点から、5−6−7−8−9−10を経由して進行方向が1回転したことが分かる。
【0050】
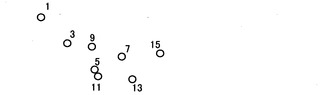
図9は、第2実施形態における軌跡図形の表示例(図10)の比較例であり、実際に表示している地図の縮尺によって定まる一定実間隔毎に軌跡図形を示している。なお、図9に示している数字は図8と対応している。実際に表示している地図の縮尺によって定まる一定実間隔は図8の場合の2倍である。よって、図9には、奇数番号の軌跡図形のみを示している。図9からでは、車両の進行方向が1回転したことを判断するのは困難である。
【0051】
図10は、第2実施形態における軌跡図形の表示例である。数字は示してないが、図10では、図9に対して、図8における6、8、10、12を方向変化地点として追加している。この図10であれば、車両の進行方向が1回転したことを判断できる。
【0052】
このように、第2実施形態においても、表示器10には、一定実間隔軌跡地点および方向変化地点に軌跡図形を表示している。そのため、縮尺が小さくても、走行軌跡は見づらくなりにくく、しかも、実際の軌跡も判断しやすい。
【0053】
なお、上記第2実施形態を次のように変形してもよい。すなわち、方向変化地点以外の地点では、その縮尺に応じた一定実間隔毎の地点を軌跡として表示する一方、方向変化地点では、その縮尺よりも一段大きな縮尺における一定実間隔毎の地点を軌跡として表示することとしてもよい。
【0054】
このようにすれば、方向変化をしていない部分は比較的粗く走行軌跡が表示される一方、方向変化地点は比較的密に走行軌跡が表示されるようになる。つまり、車両の進行方向が比較的判断しにくい方向変化地点の地点表示がそれ以外の地点と比べて詳細になされるので、縮尺が小さくても、走行軌跡は見づらくなりにくく、しかも実際の軌跡も判断しやすくなる。
【0055】
(第3実施形態)
次に、本発明の第3実施形態を説明する。第3実施形態が第1実施形態及び第2実施形態と相違する点は次の通りである。すなわち、第1実施形態及び第2実施形態では、地点決定部82は、外部メモリ9に記憶されている現在地点から、一定実間隔軌跡地点と方向変化地点とを決定し、表示制御部83は、地点決定部82で決定した一定実間隔軌跡地点と方向変化地点を示す場所に軌跡図形を表示する。これに対し、第3実施形態では、地点決定部82は、外部メモリ9に記憶されている現在地点から、走行軌跡が見づらくなりにくく、且つ、軌跡も判断しやすい表示器10の画面上の間隔として定められた一定表示間隔毎の地点を示す一定表示間隔軌跡地点を決定し、表示制御部83は、地点決定部82で決定した一定表示間隔軌跡地点を示す場所に軌跡図形を表示する点で相違する。
【0056】
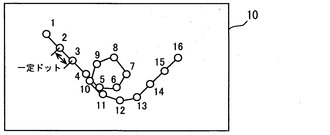
具体的には、第3実施形態では、地点決定部82は、表示器10の画面上において走行軌跡が見づらくなりにくく、且つ、走行軌跡も判断しやすい一定ドット数(例えば「4[ドット]」)に相当する実距離を縮尺(例えば「1/2万」)から逆算し、その逆算した実距離を用いて、外部メモリ9に記憶されている現在地点から一定表示間隔軌跡地点を決定する。なお、一定ドット数が特許請求の範囲に記載の一定表示間隔に相当する。
【0057】
図11は、第3実施形態における軌跡図形の表示例である。この図11において、数字は、地点が記憶された順番を示している。図11から、車両は、4の軌跡図形の地点から、5−6−7−8−9−10を経由して進行方向が1回転したことが分かる。また、図12は、図11の縮尺を2分の1にした場合における軌跡図形の表示例である。図12からも、車両は、4の軌跡図形の地点から、5−6−7−8−9−10を経由して進行方向が1回転したことが分かる。
【0058】
このように、第3実施形態においては、表示器10には、走行軌跡が見づらくなりにくく、且つ、軌跡も判断しやすい表示器10の画面上の間隔として定められた一定表示間隔毎の地点を示す一定表示間隔軌跡地点に軌跡図形を表示している。そのため、縮尺が小さくても、走行軌跡は見づらくなりにくく、しかも、実際の軌跡も判断しやすい。
【0059】
(第4実施形態)
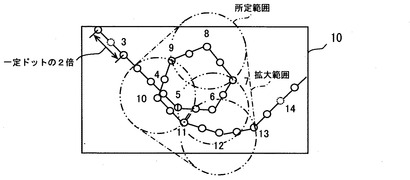
次に、本発明の第4実施形態を説明する。第4実施形態では、地点決定部82は、一定表示間隔軌跡地点を決定するに当たり、当該地点決定部82で決定した方向変化地点を中心とした所定範囲外における一定ドット間隔を、その所定範囲内における一定ドットよりも長く(例えば「2倍」)する。また、地点決定部82は、当該地点決定部82で決定した方向変化地点を一定表示間隔軌跡地点の1つとして決定する。
【0060】
詳しくは、地点決定部82は、まず、第1実施形態及び第2実施形態と同様に、進行方向が変化した地点である方向変化地点に該当する地点を決定する。次に、地点決定部82は、その決定した方向変化地点を中心とした所定範囲内において、表示器10の画面上において一定ドット数(例えば「4[ドット]」)に相当する実距離を縮尺から逆算し、その逆算した実距離を用いて、外部メモリ9に記憶されている現在地点から一定表示間隔軌跡地点を決定する。また、地点決定部82は、その決定した方向変化地点を中心とした所定範囲外において、表示器10の画面上において一定ドット数(例えば「8[ドット]」)に相当する実距離を縮尺から逆算し、その逆算した実距離を用いて、外部メモリ9に記憶されている現在地点から一定表示間隔軌跡地点を決定する。なお、方向変化地点を中心とした所定範囲内とは、例えば「方向変化地点を中心とし、一定半径「8[ドット]」とした円内」を意味する。
【0061】
また、地点決定部82は、方向変化地点が複数あり、これら方向変化地点の所定範囲の一部が重なる場合には、これら複数の所定範囲を包含する拡大範囲(例えば「円及び円の接線にて囲まれる範囲」等)を設定し、その拡大範囲外における一定ドット間隔を、その拡大範囲内における一定ドット数よりも長くする。
【0062】
図13は、第4実施形態における軌跡図形の表示例である。図13においては、6、8、10、12は方向変化地点であるため、二点鎖線にて示した円が上記所定範囲である。また、これら円の一部が重なることから、一点鎖線にて示した円の接線及び円にて囲まれる範囲が上記拡大範囲である。拡大範囲内においては、一定ドット間隔を「4ドット」のまま維持し、拡大範囲外においては、一定ドット間隔を「8ドット」と2倍になっている。
【0063】
このように、地点決定部82は、一定表示間隔軌跡地点を決定するに当たり、当該地点決定部82で決定した方向変化地点を中心とした所定範囲外における一定ドット間隔を、その所定範囲内における一定ドットよりも長くすることにより、所定範囲内では一定表示間隔軌跡地点数を密とする一方、所定範囲外では一定表示間隔軌跡地点数を疎とすることが可能となる。そして、ひいては、走行軌跡が見づらくなりにくく、且つ、実際の軌跡も判断しやすくなる。
【0064】
なお、本実施の形態では、地点決定部82は、一定表示間隔軌跡地点を決定するに当たり、方向変化地点を中心とした所定範囲内における一定ドット間隔を維持し(「4ドット」とし)、所定範囲外における一定ドット間隔を長くした(「8ドット」とした)が、これに限らない。方向変化地点を中心とした所定範囲内における一定ドット間隔を短くし(「2ドット」とし)、所定範囲外における一定ドット間隔を維持(「4ドット」と)してもよい。他にも、方向変化地点を中心とした所定範囲内における一定ドット間隔を短くし(「2ドット」とし)、所定範囲外における一定ドット間隔を長くとしてもよい(「8ドット」としてもよい)。
【0065】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内で種々変更して実施することができる。
【0066】
たとえば、上記の一定実間隔あるいは一定表示間隔は、表示器10に表示されている地図表示対象地域、表示様態などに応じて変更してもよい。具体的には、詳細な市街図表示などで建物や他の地物の表示が密集しているような場合に、これら地物表示を避けるような間隔となるように設定するようにする。
【0067】
より好ましくは、これら地物のうち、著名なランドマークやユーザが事前に設定したPOI(Point of Interest)等のみ避け、それ以外の地物には地物表示の上から走行軌跡(地点表示)を上書きするようにしてもよい。
【0068】
このようにすれば、ユーザに対して極力表示が見づらい印象を与えないようにしながらも、走行軌跡の視認性を維持することができる。
【0069】
また上記第4実施形態において、方向変化地点が複数あり、これら方向変化地点の所定範囲の一部が重なる場合には、その重なった部分の表示間隔を、所定範囲内だが重なっていない部分の表示間隔よりも狭くするように構成することもできる。
【0070】
このようにすれば、より複雑な部分の走行軌跡が密に表示される一方、それ以外の部分は方向変化地点からの距離に応じて徐々に表示が疎となっていく。つまり走行軌跡が複雑であるほど地点表示が密に行われ、単純であるほど疎となるため、表示が見づらい印象となることなく、しかも走行軌跡の視認性を維持することができる。
【符号の説明】
【0071】
1:位置検出器、 2:地磁気センサ、 3:ジャイロスコープ、 4:距
離センサ、 5:GPS受信機、 6:地図データ入力器、 7:操作スイ
ッチ群、 8:制御回路、 9:外部メモリ(地点記憶部)、 10:表示
器、 11外部情報入出力装置、 81:現在地点検出部(現在地点検出手段)
、 82:地点決定部(地点決定手段)、 83:表示制御部、 D:一定
間隔軌跡地点、 E:方向変化地点
【技術分野】
【0001】
本発明は、車両等の移動体に搭載され、或いは、使用者に携帯されて位置が移動し、その移動の軌跡を表示する移動軌跡表示装置に関する。
【背景技術】
【0002】
移動軌跡表示装置として特許文献1のものが知られている。特許文献1では、第1の走行距離(=160m)毎に自車位置を走行軌跡メモリに書き込んで走行軌跡を記憶し、その走行軌跡を地図に重ねてディスプレイ画面に表示する。さらに、特許文献1では、進行方向が設定角度以上変化したときは、自車位置が前回メモリに書き込んだ自車位置から第1の走行距離(=160m)離れていなくても、第2の走行距離(=40m)離れていれば、自車位置を走行軌跡メモリに書き込む。そのため、道路が狭い間隔で入り組んでいる地域においては狭い間隔で走行軌跡の書き込み、表示を行なうことになるので、道路が狭い間隔で入り組んでいる地域でも、走行軌跡を正確に表示することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平8−278150号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、ディスプレイに表示している地図の縮尺によらず、進行方向が設定角度以上変化したときは、第1の走行距離よりも狭い第2の走行距離を基準として自車位置を走行軌跡メモリに書き込み、走行軌跡を表示している。そのため、縮尺が小さい場合には、走行軌跡を示す丸印が密に表示されることになってしまい、見づらくなってしまう恐れがある。
【0005】
ここで、第2の走行距離を基準とせずに、それよりも長い第1の走行距離を基準とすれば、走行軌跡を示す丸印の間隔が広くなるので、見づらさは軽減される。しかし、この場合、走行軌跡を示す丸印から、実際の軌跡を判断することが難しくなってしまう。
【0006】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、縮尺が小さくても、走行軌跡が見づらくなりにくく、且つ、実際の軌跡も判断しやすい軌跡表示装置を提供することにある。
【課題を解決するための手段】
【0007】
その目的を達成するための請求項1記載の発明は、表示器を有し、その表示器に移動軌跡を表示する軌跡表示装置であって、現在地点を逐次検出する現在地点検出手段と、その現在地点検出手段で逐次検出した現在地点を記憶する地点記憶部と、縮尺が小さいほど実間隔が長くなるが、縮尺によってその実間隔が定まる一定実間隔毎の地点を示す一定実間隔軌跡地点と、進行方向が変化した地点である方向変化地点とを、前記地点記憶部に記憶されている地点から決定する地点決定手段とを備え、前記表示器に表示する移動軌跡として、前記地点決定手段で決定した一定実間隔軌跡地点および方向変化地点に軌跡図形を表示させることを特徴とする。
【0008】
このようにすれば、表示器には、一定実間隔軌跡地点および方向変化地点に軌跡図形が表示される。一定実間隔軌跡地点は、縮尺によって実間隔が定まる一定実間隔毎の地点であるが、その一定実間隔は縮尺が小さいほど長くなる。そのため、縮尺が小さい場合でも、表示器上において一定実間隔軌跡地点に対応する軌跡図形の間隔が狭くなることが抑制される。その結果、縮尺が小さくても、走行軌跡は見づらくなりにくい。しかも、進行方向が変化した地点である方向変化地点にも軌跡図形が表示されるので、実際の軌跡も判断しやすい。
【0009】
請求項2に係る発明は、前記地点決定手段は、前記地点記憶部に記憶されている地点のうち、前記一定実間隔軌跡地点よりも狭い間隔毎の地点を前記方向変化地点の候補地点とし、連続する3点の候補地点から定まるその3点のうちの中央の候補地点における進行方向の変化から、その中央の候補地点が前記方向変化地点に該当するか否かを判断することを特徴とする。
【0010】
このようにすれば、一定実間隔軌跡地点よりも狭い実間隔毎の候補地点から方向変化地点が決定されるので、方向変化地点が、実際の軌跡において進行方向が変化した地点に近くなる。よって、軌跡図形から判断できる軌跡が、実際の軌跡に近くなる。
【0011】
請求項3に係る発明は、前記地点決定手段は、基準縮尺以下の縮尺では、前記方向変化地点を決定しないことを特徴とする。
【0012】
このようにすると、基準縮尺以下の縮尺では、方向変化地点に対応する軌跡図形は表示せず、一定実間隔軌跡地点にのみ軌跡図形を表示することになる。そのため、軌跡図形は、実際の軌跡を粗い精度で示すものとなる。しかし、縮尺が小さい場合、地図自体も粗い形状となるので、一定実間隔軌跡地点にのみ軌跡図形を表示しても、その地図の粗さに則した軌跡の判断は可能である。また、方向変化地点を決定しないことから、処理が簡単になる利点がある。
【0013】
なお、請求項4に記載の発明では、地点決定手段は、一定実空間軌跡地点を決定した縮尺よりも一段大きな縮尺における一定実間隔毎の地点から方向変化地点を決定することとした。これにより、方向変化をしていない部分は比較的粗く走行軌跡が表示される一方、方向変化地点は比較的密に走行軌跡が表示されるようになる。つまり、車両の進行方向が比較的判断しにくい方向変化地点の地点表示がそれ以外の地点と比べて詳細になされるので、縮尺が小さくても、走行軌跡は見づらくなりにくく、しかも実際の軌跡も判断しやすくなる。
【0014】
上記目的を達成するための請求項5に記載の発明は、表示器を有し、その表示器に移動軌跡を表示する軌跡表示装置であって、現在地点を逐次検出する現在地点検出手段と、その現在地点検出手段で逐次検出した現在地点を記憶する地点記憶部と、走行軌跡が見づらくなりにくく、且つ、軌跡も判断しやすい表示器上の間隔として定められた一定表示間隔毎の地点を示す一定表示間隔軌跡地点を、前記地点記憶部に記憶されている地点から決定する地点決定手段とを備え、前記表示器に表示する移動軌跡として、前記地点決定手段で決定した一定表示間隔軌跡地点に軌跡図形を表示させることを特徴とする。
【0015】
このようにすれば、表示器には、一定表示間隔軌跡地点に軌跡図形が表示される。一定表示間隔軌跡地点は、走行軌跡がみづらくなりにくく、且つ、軌跡も判断しやすい表示器上の間隔として定められた一定表示間隔(例えば「4ドット」等)毎の地点である。そのため、縮尺が小さい場合でも、走行軌跡は見づらくなりにくく、且つ、実際の軌跡も判断しやすい。
【0016】
なお、地点決定手段は、表示器に表示している地図の縮尺から一定表示間隔に相当する実距離を逆算し、その逆算した実距離を用いて、地点記憶部に記憶されている地点から一定表示間隔軌跡地点を決定すればよい。
【0017】
請求項6に係る発明は、前記地点決定手段は、前記一定表示間隔軌跡地点を決定するに当たり、進行方向が変化した地点である方向変化地点を中心とした所定範囲外における一定表示間隔を、その所定範囲内における一定表示間隔よりも長くすることを特徴とする。これにより、所定範囲内では一定表示間隔軌跡地点数を密とする一方、所定範囲外では一定表示間隔軌跡地点数を疎とすることが可能となる。なお、方向変化地点を一定表示間隔軌跡地点の1つとするとよい。ちなみに、一定表示間隔は、軌跡の全範囲における一定を意味するのではなく、ある範囲での一定を意味する。
【0018】
なお、具体的には、請求項7に係る発明のように、前記地点決定手段は、前記一定表示間隔軌跡地点を決定するに当たり、前記方向変化地点を中心とした所定範囲内における一定表示間隔を維持し、前記所定範囲外における一定表示間隔を前記所定範囲内における一定表示間隔よりも長くしてもよい。あるいは、請求項8に係る発明のように、前記地点決定手段は、前記一定表示間隔軌跡地点を決定するに当たり、前記方向変化地点を中心とした所定範囲外における一定表示間隔を維持し、前記所定範囲内における一定表示間隔を前記所定範囲外における一定表示間隔よりも短くしてもよい。
【0019】
請求項9に係る発明は、前記地点決定手段は、前記地点記憶部に記憶されている地点のうち、前記一定表示間隔軌跡地点よりも狭い間隔毎の地点を前記方向変化地点の候補地点とし、連続する3点の候補地点から定まるその3点のうちの中央の候補地点における進行方向の変化から、その中央の候補地点が前記方向変化地点に該当するか否かを判断することを特徴とする。
【0020】
このようにすれば、上記請求項2に記載の発明と同様に、一定表示間隔軌跡地点よりも狭い間隔毎の候補地点から方向変化地点が決定されるので、方向変化地点が、実際の軌跡において進行方向が変化した地点に近くなる。よって、軌跡図形から判断できる軌跡が、実際の軌跡に近くなる。
【図面の簡単な説明】
【0021】
【図1】本発明の軌跡表示装置の機能を備えたナビゲーション装置の概略構成を示すブロック図である。
【図2】図1の制御回路8の機能を示す機能ブロック図である。
【図3】連続する候補地点を3点用いて、その中央の候補地点が方向変化地点に該当するか否かを決定する方法を説明する図である。
【図4】第1実施形態における軌跡図形の表示例である。
【図5】図4の表示例における軌跡図形が、一定間隔軌跡地点Dに対応するか、方向変化地点Eに対応するかを示した図である。
【図6】図4の表示例を説明するための図である。
【図7】第1実施形態の表示例と比較するための比較例示す図である。
【図8】第2実施形態において軌跡図形を表示するための内部処理を説明するための図である。
【図9】第2実施形態における軌跡図形の表示例(図10)の比較例を示す図である。
【図10】第2実施形態における軌跡図形の表示例である。
【図11】第3実施形態における軌跡図形の表示例である。
【図12】第3実施形態における軌跡図形の別の表示例である。
【図13】第4実施形態における軌跡図形の表示例である。
【発明を実施するための形態】
【0022】
(第1実施形態)
まず、本発明の第1実施形態を図面に基づいて説明する。第1実施形態は、本発明の軌跡表示装置の機能を備えたナビゲーション装置である。図1は、このナビゲーション装置の概略構成を示すブロック図である。
【0023】
同図に示すように、第1実施形態のカーナビゲーション装置は、位置検出器1、地図データ入力器6、操作スイッチ群7、外部メモリ9、表示器10、外部情報入出力装置11及びこれらに接続された制御回路8などを備えている。
【0024】
制御回路8は通常のコンピュータとして構成されており、内部には周知のCPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインが備えられている。ROMには、制御回路8が実行するためのプログラムが書き込まれており、このプログラムに従ってCPU等が所定の演算処理を実行する。
【0025】
位置検出器1は、いずれも周知の地磁気センサ2、ジャイロスコープ3、距離センサ4、及び衛星からの電波に基づいて車両の位置を測定するGPS(Global Positioning System)のためのGPS受信機5を有している。
【0026】
地図データ入力器6は、道路データ、背景データ及び文字データを含む地図データを入力するための装置である。地図データを記憶する記憶媒体としては、たとえば、ハードディスク、フラッシュメモリ、光ディスク(DVD−ROMなど)を用いることができる。
【0027】
また、地図データは、外部のサーバから通信によって取得し、後述する外部メモリ9などに格納することも可能である。この場合、外部メモリ9に格納された地図データを用いて、車両周辺の地図表示、表示地図の尺度変更、経路案内等の各種のナビゲーション機能を実施することができる。これらの機能は、主に制御回路8によって各種の演算処理がなされることによって実行される。
【0028】
操作スイッチ群7は、例えば、後述する表示器10と一体になったタッチスイッチもしくはメカニカルなスイッチ等によって構成され、各種入力に使用される。例えば、操作スイッチ群7を用いて、目的地の位置を入力することが可能であり、この場合、ナビゲーション装置は、現在地点からその目的地までの最適なルートを自動的に選択して案内ルートを形成し表示する、いわゆるルート案内機能を備えている。このような自動的に最適な案内ルートを設定する手法として、例えば周知のダイクストラ法等の手法が知られている。また、ユーザは、操作スイッチ群7を用いて、表示器10に表示されている地図の縮尺を変更する操作や、走行軌跡を表示させる操作を行うこともできる。
【0029】
外部メモリ9は、例えば、メモリカードやハードディスク等の記憶媒体からなる。この外部メモリ9には、ユーザによって記憶されたテキストデータ、画像データ、音声データ、走行軌跡データ等の各種データが記憶される。さらに、車両用ナビゲーション装置が、上述したように、地図データを外部のサーバから取得する場合には、その地図データを格納したりする。
【0030】
表示器10は、例えば、液晶ディスプレイによって構成され、表示器10の画面には車両の現在地点に対応しつつ、その進行方位を表示する自車両マーク、及び、地図データ入力器6より入力された地図データによって生成される車両周辺の道路地図を表示することができる。さらに、目的地が設定された場合、この道路地図上には、現在地点から目的地までの案内ルートを重ねて表示することが出来る。また、詳しくは後述するが、走行軌跡を示す軌跡図形を地図に重畳表示することもできる。
【0031】
外部情報入出力装置11は、道路に敷設されたビーコンや各地のFM放送局を介して、VICSセンタから配信される道路交通情報等の情報を受信したり、必要に応じて車両側から外部へ情報を送信したりする装置である。受信した情報は、制御回路8で処理され、例えば、渋滞情報や規制情報等は表示器10に表示される道路地図上に重ねて表示される。
【0032】
次に、制御回路8について説明する。図2は、制御回路8の機能を示す機能ブロック図であり、制御回路8は、CPUがRAMの一時記憶機能を利用しつつ、ROMに書き込まれたプログラムを実行することで、図2に示す現在地点検出部81、地点決定部82、表示制御部83として機能する。なお、図2には示していないが、制御回路8は、目的地設定部、経路探索部、経路案内部等も備えている。
【0033】
現在地点検出部81は、位置検出器1から入力される信号に基づいて、車両の現在地点を逐次決定する。なお、位置検出器1を構成する地磁気センサ2、ジャイロスコープ3、距離センサ4、GPS受信機5は、各々が性質の異なる誤差を持っているため、各々からの信号を補完しながら現在地点を逐次検出する。すなわち、GPSによる電波航法と、地磁気センサ、ジャイロスコープ3及び距離センサ4による自立航法を組み合わせたハイブリッド航法により、車両の現在地点(座標)を決定する。なお、各センサの精度によっては、位置検出器1を上述した内の一部で構成してもよく、更に、図示しないステアリングの回転センサ、各転動輪の車速センサ等を用いてもよい。また、現在地点検出部81では、現在地点に加えて進行方位も決定する。
【0034】
そして、現在地点検出部81は、現在地点の検出を、制御回路8の性能によって定まる所定の処理周期(たとえば、200ms)で行ない、検出した現在地点を、本実施形態において請求項の地点記憶部として機能する外部メモリ9に逐次記憶する。
【0035】
地点決定部82は、外部メモリ9に記憶されている現在地点、すなわち、過去に走行した地点から、表示器10に軌跡図形を表示する地点である一定実間隔軌跡地点と方向変化地点とを決定する。これら一定実間隔軌跡地点と方向変化地点とを決定する処理は、操作スイッチ群7から軌跡表示指示が行われたときに行ってもよいし、その指示の有無によらず、一定の走行距離毎に自動的に行ってもよい。
【0036】
一定実間隔軌跡地点は、縮尺によって実間隔が定まる一定実間隔毎の地点である。ここで、実間隔は表示上の間隔ではなく実際の間隔であり、一定実間隔は、縮尺が小さくなるにつれて、段階的に長くなるように設定されている。たとえば、一定実間隔は、縮尺が1/5000〜1/2万のときは50m、縮尺が1/4万〜1/8万のときは100mに設定される。なお、縮尺1/5000、1/2万、1/4万、1/8万は、それぞれ、表示上の単位スケールが50m、200m、400m、800mとなる。
【0037】
方向変化地点は、車両の進行方向が変化した地点であり、外部メモリ9に記憶されている地点から、次のようにして決定する。まず、外部メモリ9に記憶されている地点から、一定実間隔軌跡地点よりも狭い間隔毎の地点を方向変化地点の候補地点とする。この候補地点は、本実施形態では、上記処理周期毎に記憶した全ての地点とする。ただし、これに限らず、処理周期毎に記憶した地点を1点おき、または複数点おきに候補地点としてもよい。また、一定実間隔よりも狭ければ、10mおき等、距離毎に候補地点を決定してもよい。
【0038】
候補地点を決定したら、連続する候補地点を3点用い、図3に示すように、その3点のうちの中央の点Bと一方の端の点Aとによって定まるABベクトルが示す進行方向と、その3点のうちの中央の点Bと他方の端の点Cとによって定まるBCベクトルが示す進行方向との進行方向差(角度θ)が基準値よりも大きいときは、候補地点Bを方向変化地点とする。
【0039】
上記方向変化地点は、表示器10に表示されている地図の縮尺がどのような縮尺であるかによらずに決定することとしてもよいのであるが、本実施形態においては、地図の縮尺が基準縮尺以下では、方向変化地点は決定しない。この基準縮尺は、任意に設定すればよい。方向変化地点を決定しないと、その方向変化地点に対する軌跡図形は表示しないことになることから、軌跡図形は、実際の軌跡を粗い精度で示すものとなる。しかし、縮尺が小さくなると、地図自体も粗い形状となることから、軌跡図形も地図縮尺に則して粗いものでもよいことになる。また、縮尺が小さいにもかかわらず、多くの軌跡図形を表示してしまうと、軌跡図形同士の間隔が狭まり、地図が見づらくなってしまう。これらの点を考慮して、基準縮尺を適宜設定すればよい。
【0040】
表示制御部83は、表示器10の表示内容の制御を行う。たとえば、表示制御部83は、操作スイッチ群7からの入力信号に基づいて定まる縮尺の地図データを地図データ入力部6から読み出して、地図を表示器10に表示する。また、表示制御部83は、操作スイッチ群7から軌跡表示指示が行われた場合には、表示器10に表示している地図上において、地点決定部82で決定した一定間隔軌跡地点と方向変化地点を示す場所に軌跡図形を表示する。
【0041】
次に、上記軌跡図形の表示例を説明する。図4は本実施形態における軌跡図形の表示例である。この例では、軌跡図形として○が用いられている。もちろん、これに限らず、他の種々の図形(●、□など)を用いてもよい。また、図4には軌跡図形(○印)のみを示しているが、実際には、この図4に示される軌跡図形(○印)が表示器10に表示されている地図に重畳表示される。
【0042】
図5は、図4の表示例における軌跡図形(○印)が、それぞれ、一定実間隔軌跡地点Dに対応するか、方向変化地点Eに対応するかを示した図である。この図5では、黒丸が方向変化地点の候補地点を示している。なお、候補地点は、説明に必要な部分のみ示しているが、実際には、走行した経路全体にわたって記憶されている。
【0043】
この図5において、連続する3つの候補地点からその中央の候補地点における進行方向の変化を決定して、その中央の候補地点を方向変化地点とするか否かを決定していくと、E1、E2、E3が方向変化地点となる。一方、一定実間隔軌跡地点Dは、走行軌跡上の一定実間隔毎の点である。なお、走行軌跡上の実間隔は、外部メモリ9に記憶されている地点間の距離を積算することで算出する。このようにして決定した一定実間隔軌跡地点Dおよび方向変化地点Eに軌跡図形(○印)を表示したものが、先に示した図4である。
【0044】
図6も、図4の表示例を説明するための図である。図6において、軌跡図形(○印)の位置は図4と同じである。また、実線は軌跡図形(○印)を直線で結んだ線、破線は実際の走行軌跡を示している。この図6の実線と破線との比較から分かるように、方向変化地点Eにも軌跡図形(○印)を表示することで、軌跡図形から判断できる軌跡が、実際の走行軌跡に近い形状となる。
【0045】
図7は、第1実施形態の表示例と比較するための比較例であり、方向変化地点Eには軌跡図形を示さず、一定実間隔軌跡地点にのみ軌跡図形を示した例である。また、実線は軌跡図形を直線で結んだ線、破線は実際の走行軌跡を示している。この図7の実線と破線との比較から分かるように、一定実間隔軌跡地点にのみ軌跡図形を表示すると、軌跡図形から判断できる軌跡と実際の走行軌跡との乖離が大きくなってしまい、軌跡図形から実際の走行軌跡を判断することが困難になる。
【0046】
なお、一定実間隔軌跡地点のみに軌跡図形を表示するとしても、一定実間隔を狭くすれば、軌跡図形から実際の走行軌跡を判断しやすくなる。しかしながら、図4〜図7では、軌跡図形のみ示しているが、実際には、軌跡図形は、道路、地形、建物など、種々の情報が描かれた地図に重畳表示される。そのため、軌跡図形の数が多くなると、地図全体としてごちゃごちゃした印象となってしまうので、軌跡図形の数を少なくすることが好ましいのである。よって、一定実間隔軌跡地点のみに軌跡図形を表示するのではなく、本実施形態のように、方向変化地点にも軌跡図形を表示することによって、一定実間隔軌跡地点の数を少なくすることが好ましいのである。
【0047】
以上、説明した第1実施形態によれば、表示器10には、一定実間隔軌跡地点Dおよび方向変化地点Eに軌跡図形が表示される。一定実間隔軌跡地点Dは、縮尺によって実間隔が定まる一定実間隔毎の地点であるが、その一定実間隔は縮尺が小さいほど長くなる。そのため、縮尺が小さい場合でも、表示器10上において一定実間隔軌跡地点に対応する軌跡図形の間隔が狭くなることが抑制される。その結果、縮尺が小さくても、走行軌跡は見づらくなりにくい。しかも、方向変化地点Eにも軌跡図形が表示されるので、実際の軌跡も判断しやすい。なお、このように実際の軌跡が判断しやすくなると、オフロードを走行した軌跡を確認する際に特に有用である。
【0048】
(第2実施形態)
次に、本発明の第2実施形態を説明する。第2実施形態が第1実施形態と相違する点は、第1実施形態では、制御回路8の処理周期毎に記憶した全ての地点を方向変化地点の候補地点としていたが、第2実施形態では、表示器10に実際に表示している地図の縮尺よりも大きな縮尺に対して設定されている一定実間隔毎の地点を方向変化地点の候補地点とする。この点において第2実施形態は第1実施形態と相違するのみであり、その他の点は第1実施形態と同じである。
【0049】
図8は、第2実施形態において軌跡図形を表示するための内部処理を説明するための図であって、実際に表示している地図の縮尺によって定まる一定実間隔よりも一段階狭い一定実間隔毎の地点に軌跡図形を示している。後者(一段狭い一定実間隔毎の地点に軌跡図形を表示する場合)から前者(後者に比べ一段広い一定実間隔毎の地点に軌跡図形を表示する場合)を見れば、前者は軌跡図形を間引いて表示していると言える。一方、前者から後者を見れば、後者は、地点がより忠実に表示されており、地点がより一層密に表示されていると言える。また、図8において、数字は、地点が記憶された順番を示している。図8から、車両は、4の軌跡図形の地点から、5−6−7−8−9−10を経由して進行方向が1回転したことが分かる。
【0050】
図9は、第2実施形態における軌跡図形の表示例(図10)の比較例であり、実際に表示している地図の縮尺によって定まる一定実間隔毎に軌跡図形を示している。なお、図9に示している数字は図8と対応している。実際に表示している地図の縮尺によって定まる一定実間隔は図8の場合の2倍である。よって、図9には、奇数番号の軌跡図形のみを示している。図9からでは、車両の進行方向が1回転したことを判断するのは困難である。
【0051】
図10は、第2実施形態における軌跡図形の表示例である。数字は示してないが、図10では、図9に対して、図8における6、8、10、12を方向変化地点として追加している。この図10であれば、車両の進行方向が1回転したことを判断できる。
【0052】
このように、第2実施形態においても、表示器10には、一定実間隔軌跡地点および方向変化地点に軌跡図形を表示している。そのため、縮尺が小さくても、走行軌跡は見づらくなりにくく、しかも、実際の軌跡も判断しやすい。
【0053】
なお、上記第2実施形態を次のように変形してもよい。すなわち、方向変化地点以外の地点では、その縮尺に応じた一定実間隔毎の地点を軌跡として表示する一方、方向変化地点では、その縮尺よりも一段大きな縮尺における一定実間隔毎の地点を軌跡として表示することとしてもよい。
【0054】
このようにすれば、方向変化をしていない部分は比較的粗く走行軌跡が表示される一方、方向変化地点は比較的密に走行軌跡が表示されるようになる。つまり、車両の進行方向が比較的判断しにくい方向変化地点の地点表示がそれ以外の地点と比べて詳細になされるので、縮尺が小さくても、走行軌跡は見づらくなりにくく、しかも実際の軌跡も判断しやすくなる。
【0055】
(第3実施形態)
次に、本発明の第3実施形態を説明する。第3実施形態が第1実施形態及び第2実施形態と相違する点は次の通りである。すなわち、第1実施形態及び第2実施形態では、地点決定部82は、外部メモリ9に記憶されている現在地点から、一定実間隔軌跡地点と方向変化地点とを決定し、表示制御部83は、地点決定部82で決定した一定実間隔軌跡地点と方向変化地点を示す場所に軌跡図形を表示する。これに対し、第3実施形態では、地点決定部82は、外部メモリ9に記憶されている現在地点から、走行軌跡が見づらくなりにくく、且つ、軌跡も判断しやすい表示器10の画面上の間隔として定められた一定表示間隔毎の地点を示す一定表示間隔軌跡地点を決定し、表示制御部83は、地点決定部82で決定した一定表示間隔軌跡地点を示す場所に軌跡図形を表示する点で相違する。
【0056】
具体的には、第3実施形態では、地点決定部82は、表示器10の画面上において走行軌跡が見づらくなりにくく、且つ、走行軌跡も判断しやすい一定ドット数(例えば「4[ドット]」)に相当する実距離を縮尺(例えば「1/2万」)から逆算し、その逆算した実距離を用いて、外部メモリ9に記憶されている現在地点から一定表示間隔軌跡地点を決定する。なお、一定ドット数が特許請求の範囲に記載の一定表示間隔に相当する。
【0057】
図11は、第3実施形態における軌跡図形の表示例である。この図11において、数字は、地点が記憶された順番を示している。図11から、車両は、4の軌跡図形の地点から、5−6−7−8−9−10を経由して進行方向が1回転したことが分かる。また、図12は、図11の縮尺を2分の1にした場合における軌跡図形の表示例である。図12からも、車両は、4の軌跡図形の地点から、5−6−7−8−9−10を経由して進行方向が1回転したことが分かる。
【0058】
このように、第3実施形態においては、表示器10には、走行軌跡が見づらくなりにくく、且つ、軌跡も判断しやすい表示器10の画面上の間隔として定められた一定表示間隔毎の地点を示す一定表示間隔軌跡地点に軌跡図形を表示している。そのため、縮尺が小さくても、走行軌跡は見づらくなりにくく、しかも、実際の軌跡も判断しやすい。
【0059】
(第4実施形態)
次に、本発明の第4実施形態を説明する。第4実施形態では、地点決定部82は、一定表示間隔軌跡地点を決定するに当たり、当該地点決定部82で決定した方向変化地点を中心とした所定範囲外における一定ドット間隔を、その所定範囲内における一定ドットよりも長く(例えば「2倍」)する。また、地点決定部82は、当該地点決定部82で決定した方向変化地点を一定表示間隔軌跡地点の1つとして決定する。
【0060】
詳しくは、地点決定部82は、まず、第1実施形態及び第2実施形態と同様に、進行方向が変化した地点である方向変化地点に該当する地点を決定する。次に、地点決定部82は、その決定した方向変化地点を中心とした所定範囲内において、表示器10の画面上において一定ドット数(例えば「4[ドット]」)に相当する実距離を縮尺から逆算し、その逆算した実距離を用いて、外部メモリ9に記憶されている現在地点から一定表示間隔軌跡地点を決定する。また、地点決定部82は、その決定した方向変化地点を中心とした所定範囲外において、表示器10の画面上において一定ドット数(例えば「8[ドット]」)に相当する実距離を縮尺から逆算し、その逆算した実距離を用いて、外部メモリ9に記憶されている現在地点から一定表示間隔軌跡地点を決定する。なお、方向変化地点を中心とした所定範囲内とは、例えば「方向変化地点を中心とし、一定半径「8[ドット]」とした円内」を意味する。
【0061】
また、地点決定部82は、方向変化地点が複数あり、これら方向変化地点の所定範囲の一部が重なる場合には、これら複数の所定範囲を包含する拡大範囲(例えば「円及び円の接線にて囲まれる範囲」等)を設定し、その拡大範囲外における一定ドット間隔を、その拡大範囲内における一定ドット数よりも長くする。
【0062】
図13は、第4実施形態における軌跡図形の表示例である。図13においては、6、8、10、12は方向変化地点であるため、二点鎖線にて示した円が上記所定範囲である。また、これら円の一部が重なることから、一点鎖線にて示した円の接線及び円にて囲まれる範囲が上記拡大範囲である。拡大範囲内においては、一定ドット間隔を「4ドット」のまま維持し、拡大範囲外においては、一定ドット間隔を「8ドット」と2倍になっている。
【0063】
このように、地点決定部82は、一定表示間隔軌跡地点を決定するに当たり、当該地点決定部82で決定した方向変化地点を中心とした所定範囲外における一定ドット間隔を、その所定範囲内における一定ドットよりも長くすることにより、所定範囲内では一定表示間隔軌跡地点数を密とする一方、所定範囲外では一定表示間隔軌跡地点数を疎とすることが可能となる。そして、ひいては、走行軌跡が見づらくなりにくく、且つ、実際の軌跡も判断しやすくなる。
【0064】
なお、本実施の形態では、地点決定部82は、一定表示間隔軌跡地点を決定するに当たり、方向変化地点を中心とした所定範囲内における一定ドット間隔を維持し(「4ドット」とし)、所定範囲外における一定ドット間隔を長くした(「8ドット」とした)が、これに限らない。方向変化地点を中心とした所定範囲内における一定ドット間隔を短くし(「2ドット」とし)、所定範囲外における一定ドット間隔を維持(「4ドット」と)してもよい。他にも、方向変化地点を中心とした所定範囲内における一定ドット間隔を短くし(「2ドット」とし)、所定範囲外における一定ドット間隔を長くとしてもよい(「8ドット」としてもよい)。
【0065】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内で種々変更して実施することができる。
【0066】
たとえば、上記の一定実間隔あるいは一定表示間隔は、表示器10に表示されている地図表示対象地域、表示様態などに応じて変更してもよい。具体的には、詳細な市街図表示などで建物や他の地物の表示が密集しているような場合に、これら地物表示を避けるような間隔となるように設定するようにする。
【0067】
より好ましくは、これら地物のうち、著名なランドマークやユーザが事前に設定したPOI(Point of Interest)等のみ避け、それ以外の地物には地物表示の上から走行軌跡(地点表示)を上書きするようにしてもよい。
【0068】
このようにすれば、ユーザに対して極力表示が見づらい印象を与えないようにしながらも、走行軌跡の視認性を維持することができる。
【0069】
また上記第4実施形態において、方向変化地点が複数あり、これら方向変化地点の所定範囲の一部が重なる場合には、その重なった部分の表示間隔を、所定範囲内だが重なっていない部分の表示間隔よりも狭くするように構成することもできる。
【0070】
このようにすれば、より複雑な部分の走行軌跡が密に表示される一方、それ以外の部分は方向変化地点からの距離に応じて徐々に表示が疎となっていく。つまり走行軌跡が複雑であるほど地点表示が密に行われ、単純であるほど疎となるため、表示が見づらい印象となることなく、しかも走行軌跡の視認性を維持することができる。
【符号の説明】
【0071】
1:位置検出器、 2:地磁気センサ、 3:ジャイロスコープ、 4:距
離センサ、 5:GPS受信機、 6:地図データ入力器、 7:操作スイ
ッチ群、 8:制御回路、 9:外部メモリ(地点記憶部)、 10:表示
器、 11外部情報入出力装置、 81:現在地点検出部(現在地点検出手段)
、 82:地点決定部(地点決定手段)、 83:表示制御部、 D:一定
間隔軌跡地点、 E:方向変化地点
【特許請求の範囲】
【請求項1】
表示器を有し、その表示器に移動軌跡を表示する軌跡表示装置であって、
現在地点を逐次検出する現在地点検出手段と、
その現在地点検出手段で逐次検出した現在地点を記憶する地点記憶部と、
縮尺が小さいほど実間隔が長くなるが、縮尺によってその実間隔が定まる一定実間隔毎の地点を示す一定実間隔軌跡地点と、進行方向が変化した地点である方向変化地点とを、前記地点記憶部に記憶されている地点から決定する地点決定手段とを備え、
前記表示器に表示する移動軌跡として、前記地点決定手段で決定した一定実間隔軌跡地点および方向変化地点に軌跡図形を表示させることを特徴とする軌跡表示装置。
【請求項2】
請求項1において、
前記地点決定手段は、前記地点記憶部に記憶されている地点のうち、前記一定実間隔軌跡地点よりも狭い間隔毎の地点を前記方向変化地点の候補地点とし、連続する3点の候補地点から定まるその3点のうちの中央の候補地点における進行方向の変化から、その中央の候補地点が前記方向変化地点に該当するか否かを判断することを特徴とする軌跡表示装置。
【請求項3】
請求項1または2において、
前記地点決定手段は、基準縮尺以下の縮尺では、前記方向変化地点を決定しないことを特徴とする軌跡表示装置。
【請求項4】
請求項1において、
前記地点決定手段は、前記一定実空間軌跡地点を決定した縮尺よりも一段大きな縮尺における一定実間隔毎の地点から前記方向変化地点を決定することを特徴とする軌跡表示装置。
【請求項5】
表示器を有し、その表示器に移動軌跡を表示する軌跡表示装置であって、
現在地点を逐次検出する現在地点検出手段と、
その現在地点検出手段で逐次検出した現在地点を記憶する地点記憶部と、
走行軌跡が見づらくなりにくく、且つ、軌跡も判断しやすい表示器上の間隔として定められた一定表示間隔毎の地点を示す一定表示間隔軌跡地点を、前記地点記憶部に記憶されている地点から決定する地点決定手段とを備え、
前記表示器に表示する移動軌跡として、前記地点決定手段で決定した一定表示間隔軌跡地点に軌跡図形を表示させることを特徴とする軌跡表示装置。
【請求項6】
請求項5において、
前記地点決定手段は、前記一定表示間隔軌跡地点を決定するに当たり、進行方向が変化した地点である方向変化地点を中心とした所定範囲外における一定表示間隔を、その所定範囲内における一定表示間隔よりも長くすることを特徴とする軌跡表示装置。
【請求項7】
請求項6において、
前記地点決定手段は、前記一定表示間隔軌跡地点を決定するに当たり、前記方向変化地点を中心とした所定範囲内における一定表示間隔を維持し、前記所定範囲外における一定表示間隔を前記所定範囲内における一定表示間隔よりも長くすることを特徴とする軌跡表示装置。
【請求項8】
請求項6において、
前記地点決定手段は、前記一定表示間隔軌跡地点を決定するに当たり、前記方向変化地点を中心とした所定範囲外における一定表示間隔を維持し、前記所定範囲内における一定表示間隔を前記所定範囲外における一定表示間隔よりも短くすることを特徴とする軌跡表示装置。
【請求項9】
請求項6〜8のいずれかにおいて、
前記地点決定手段は、前記地点記憶部に記憶されている地点のうち、前記一定表示間隔軌跡地点よりも狭い間隔毎の地点を前記方向変化地点の候補地点とし、連続する3点の候補地点から定まるその3点のうちの中央の候補地点における進行方向の変化から、その中央の候補地点が前記方向変化地点に該当するか否かを判断することを特徴とする軌跡表示装置。
【請求項1】
表示器を有し、その表示器に移動軌跡を表示する軌跡表示装置であって、
現在地点を逐次検出する現在地点検出手段と、
その現在地点検出手段で逐次検出した現在地点を記憶する地点記憶部と、
縮尺が小さいほど実間隔が長くなるが、縮尺によってその実間隔が定まる一定実間隔毎の地点を示す一定実間隔軌跡地点と、進行方向が変化した地点である方向変化地点とを、前記地点記憶部に記憶されている地点から決定する地点決定手段とを備え、
前記表示器に表示する移動軌跡として、前記地点決定手段で決定した一定実間隔軌跡地点および方向変化地点に軌跡図形を表示させることを特徴とする軌跡表示装置。
【請求項2】
請求項1において、
前記地点決定手段は、前記地点記憶部に記憶されている地点のうち、前記一定実間隔軌跡地点よりも狭い間隔毎の地点を前記方向変化地点の候補地点とし、連続する3点の候補地点から定まるその3点のうちの中央の候補地点における進行方向の変化から、その中央の候補地点が前記方向変化地点に該当するか否かを判断することを特徴とする軌跡表示装置。
【請求項3】
請求項1または2において、
前記地点決定手段は、基準縮尺以下の縮尺では、前記方向変化地点を決定しないことを特徴とする軌跡表示装置。
【請求項4】
請求項1において、
前記地点決定手段は、前記一定実空間軌跡地点を決定した縮尺よりも一段大きな縮尺における一定実間隔毎の地点から前記方向変化地点を決定することを特徴とする軌跡表示装置。
【請求項5】
表示器を有し、その表示器に移動軌跡を表示する軌跡表示装置であって、
現在地点を逐次検出する現在地点検出手段と、
その現在地点検出手段で逐次検出した現在地点を記憶する地点記憶部と、
走行軌跡が見づらくなりにくく、且つ、軌跡も判断しやすい表示器上の間隔として定められた一定表示間隔毎の地点を示す一定表示間隔軌跡地点を、前記地点記憶部に記憶されている地点から決定する地点決定手段とを備え、
前記表示器に表示する移動軌跡として、前記地点決定手段で決定した一定表示間隔軌跡地点に軌跡図形を表示させることを特徴とする軌跡表示装置。
【請求項6】
請求項5において、
前記地点決定手段は、前記一定表示間隔軌跡地点を決定するに当たり、進行方向が変化した地点である方向変化地点を中心とした所定範囲外における一定表示間隔を、その所定範囲内における一定表示間隔よりも長くすることを特徴とする軌跡表示装置。
【請求項7】
請求項6において、
前記地点決定手段は、前記一定表示間隔軌跡地点を決定するに当たり、前記方向変化地点を中心とした所定範囲内における一定表示間隔を維持し、前記所定範囲外における一定表示間隔を前記所定範囲内における一定表示間隔よりも長くすることを特徴とする軌跡表示装置。
【請求項8】
請求項6において、
前記地点決定手段は、前記一定表示間隔軌跡地点を決定するに当たり、前記方向変化地点を中心とした所定範囲外における一定表示間隔を維持し、前記所定範囲内における一定表示間隔を前記所定範囲外における一定表示間隔よりも短くすることを特徴とする軌跡表示装置。
【請求項9】
請求項6〜8のいずれかにおいて、
前記地点決定手段は、前記地点記憶部に記憶されている地点のうち、前記一定表示間隔軌跡地点よりも狭い間隔毎の地点を前記方向変化地点の候補地点とし、連続する3点の候補地点から定まるその3点のうちの中央の候補地点における進行方向の変化から、その中央の候補地点が前記方向変化地点に該当するか否かを判断することを特徴とする軌跡表示装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−191289(P2011−191289A)
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願番号】特願2011−4043(P2011−4043)
【出願日】平成23年1月12日(2011.1.12)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願日】平成23年1月12日(2011.1.12)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]