
移動駆動機構
【課題】電磁ノイズ等の発生がなく精度の良い移動駆動を可能とする移動駆動機構を提供する。
【解決手段】回転する駆動輪の外周に間隔をおいて複数設けられたボンド磁石5と、ベルト1に設けられてボンド磁石5に吸引されてこれと同方向へ移動させられるシート磁石3とを備え、各磁石3,5の対向面は中心を通る直線によって複数領域に区画されるとともに、隣接した各領域に互いに異なる磁極が形成されている。この領域は、移動方向の前後および移動方向に直交する方向の左右に区画されている。
【解決手段】回転する駆動輪の外周に間隔をおいて複数設けられたボンド磁石5と、ベルト1に設けられてボンド磁石5に吸引されてこれと同方向へ移動させられるシート磁石3とを備え、各磁石3,5の対向面は中心を通る直線によって複数領域に区画されるとともに、隣接した各領域に互いに異なる磁極が形成されている。この領域は、移動方向の前後および移動方向に直交する方向の左右に区画されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は移動駆動機構に関し、特に、磁力を使用してベルト等を移動させる移動駆動機構に関する。
【背景技術】
【0002】
従来、搬送用ベルト等の移動駆動機構としては駆動モータにより回転させられる駆動プーリでベルトを移動させるものが多用されている。しかし、このような移動駆動機構はベルトとプーリ外周の摩擦力で駆動するものであるため、プーリの外周等に油や水が付着すると摩擦力が低下してベルトの移動速度が不安定になり、ベルトの移動精度が低下するという問題がある。そこで、特許文献1には、ベルトに磁性粉を混入してその長手方向へN極とS極を交互に着磁するとともに、ベルト表面に対向させて長手方向へ複数の電磁石を配設して、これら電磁石に適宜通電してベルトを吸引移動させるものが示されている。
【特許文献1】特開2001−187624
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、上記電磁石を使用した従来の移動駆動機構では電磁石のための比較的複雑な通電制御回路を必要とするとともに、用途によっては電磁石から発せられる電磁ノイズが悪影響を与えるという問題があった。
【0004】
そこで、本発明はこのような課題を解決するもので、電磁ノイズ等の発生がなく精度の良い移動駆動を可能とする移動駆動機構を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本第1発明では、移動する駆動側磁石体(5)と、駆動側磁石体(5)に吸引されてこれと同方向へ移動させられる従動側磁石体(3)とを備え、各磁石体(3,5)の対向面は複数領域(31〜34)に区画されるとともに、隣接した各領域(31〜34)に互いに異なる磁極が形成されている。
【0006】
本第1発明においては、駆動側磁石体と従動側磁石体の対向面に形成された各領域のうち同一磁極領域は反発し、異なる磁極領域は吸引される。したがって、従動側磁石体は駆動側磁石体に対してずれを生じることなく常に所定の姿勢で吸着されることになり、精度よく移動させられる。また、電磁石を使用しないから、電磁ノイズ等の発生のおそれがない。
【0007】
本第2発明では、上記領域(31〜34)は、少なくとも移動方向の前後ないし移動方向に直交する方向の左右に区画されている。本第2発明においては、従動側磁石体が移動する際の、移動方向での位置ずれの発生、あるいは移動方向に直交する方向での位置ずれの発生が少なくとも防止される。
【0008】
本第3発明では、上記領域(31〜34)は、上記対向面の中心(O)を通る直線(L1,L2,L3,L4)によって面積の等しい2以上の偶数領域に区画されている。本第3発明によれば、領域の区画を容易に行うことができる。
【0009】
本第4発明では、上記駆動側磁石体(5)は回転体(4)の周面に間隔をおいて複数設けられており、上記従動側磁石体(3)は、回転体(4)の周面に接する被回転体(1)の周面に間隔をおいて複数設けられている。なお、上記被回転体は搬送用のベルトとすることができる。本第4発明においては、位置ずれの無い精度の良い回転移動が実現される。
【0010】
なお、上記カッコ内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【発明の効果】
【0011】
以上のように、本発明の移動駆動機構によれば、電磁ノイズ等の発生がなく精度の良い移動駆動を実現することができる。
【発明を実施するための最良の形態】
【0012】
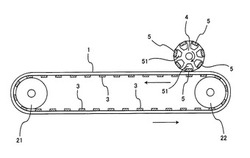
図1には本発明の移動駆動機構をベルト駆動に適用した例を示す。図1において、一対のプーリ21,22間に懸架されて被回転体としてのベルト1が配設されている。ベルト1は例えば0.5mm厚程度の樹脂製のもので、電子部品、食品、医薬等の、清浄度と移動精度を要求されるものを搬送する。上記ベルト1の裏面には一定間隔で従動側磁石体としてのシート磁石3が接着されている。シート磁石3は0.4mm厚程度のもので、バインダと磁性材を混合し、混練加工してシート状にしたものである。なお、図1は理解を容易にするために、実寸とは相違して描いてある。
【0013】
ここで、上記シート磁石3に使用されるバインダとしては、プーリ21,22部分でのベルト反転の際の屈曲に対し十分な耐性を有する、NBR,SBR等のゴムや、ウレタン系あるいはポリエステル系のエラストマ等が使用できる。また、磁性材としては、フェライト系、NeFeB系、SmFeN系、あるいはSmCo系等の磁性粉が使用できる。シートへの成形は、ゴムの場合には加圧ニーダ後、カレンダ加工を行い、エラストマの場合は、押出し成形後、カレンダ加工する。このようなシート磁石3は柔軟性と耐摩耗性、耐水性を備える樹脂材で被覆しておくのが望ましく、樹脂材としては、シリコン樹脂、ウレタン樹脂、フッ素樹脂等が使用できる。
【0014】
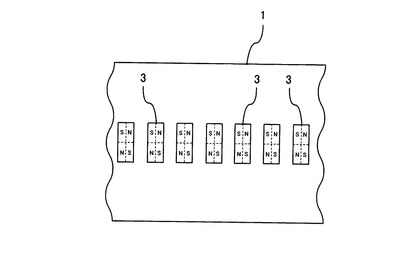
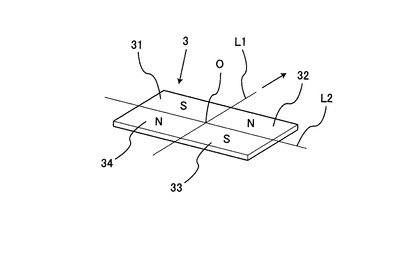
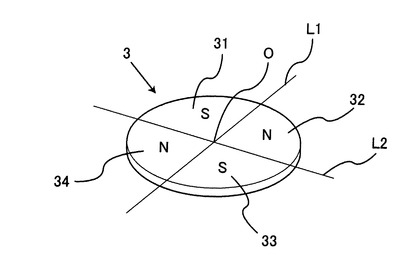
ベルト1裏面に接着された上記シート磁石3は図2に示すように長方形状をなして、ベルト1の中央にその長手方向へ等間隔で配設されている。ベルト1裏面に接着されたシート磁石3の表面は、中心O(図3)を通り互いに直交する直線L1,L2によって等面積の4つの領域31,32,33,34に区画されており、隣接する領域31〜34は互いに異なる極N,Sに着磁されている。これにより、シート磁石3の表面は、移動方向(図中の矢印)の前後と移動方向に直交する方向の左右で、互いに異なる極に区画されている。
【0015】
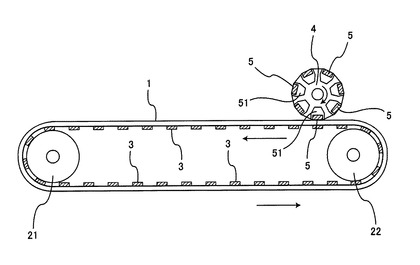
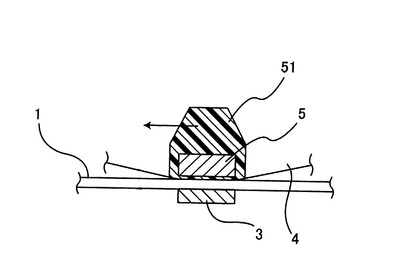
図1において、ベルト1の一端上面に接して回転体としての駆動輪4が設けられており、この駆動輪4は図略のモータによって図中矢印の方向へ回転させられている。駆動輪4の外周には駆動側磁石体としての一定厚のボンド磁石5が上記シート磁石3の間隔と同間隔で周方向へ設けられている。ボンド磁石5はバインダと磁性材を混合して圧縮成形や射出成形で一定形状としたもので、バインダとしては、確実にベルト1側のシート磁石3を吸着移動させるために十分な剛性を有するPA12,PA6,PPS等の熱可塑性樹脂、あるいはエポキシ樹脂やフェノール樹脂等の熱硬化性樹脂等が使用できる。また、磁性材としてはフェライト系、NeFeB系、SmFeN系、あるいはSmCo系等の磁性粉が使用できる。駆動輪4へのボンド磁石5の取り付けは、例えばボンド磁石5の外周に樹脂製磁石ホルダ51を射出成形してこれらを一体化し、磁石ホルダ51を駆動輪4の外周に機械的に取り付ける等の手段が採用できる。
【0016】
駆動輪4の外周に設けた上記ボンド磁石5は、ベルト面に接しシート磁石3と対向する面がこれと同形としてあり、かつ、当該対向面はシート磁石3と同様に4つの領域に区画されて、各領域がシート磁石3とは互いに異なる極に着磁されている。駆動輪4の回転に伴って移動する(図4矢印)ボンド磁石5がベルト1を介してシート磁石3を吸着すると、シート磁石3と一体のベルト1部分に推進力が付与されてベルト1全体が同方向へ移動させられる。この時、対向するシート磁石3とボンド磁石5は、同極領域は互いに反発し異極領域が互いに吸引されるから、両磁石3,5は、対向する表面の中心O(図3)が一致するように互いに吸着する。これにより、ベルト1は長手方向と幅方向で駆動輪4に対しブレることなく正確に位置決めされた状態で移動させられる。これにより、ベルト1のスリップによる空送りやその蛇行が防止される。
【0017】
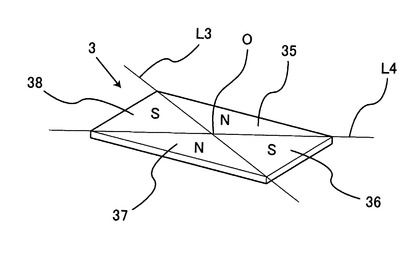
なお、シート磁石3およびボンド磁石5の外形は長方形に限られず、図5に示すような円形や、その他、四角形、楕円等であっても良い。また、図6に示すように、長方形の対角線L3,L4によって磁石面を4つの領域35,36,37,38に区画して、これによってベルト1長手方向の前後とベルト1幅方向の左右に領域35,37と36,38を区画するようにしても良い。さらに、スリップによるベルト1の空送りを防止するだけで良ければ、ベルト1の幅方向へ延びる直線によって磁石面をベルト長手方向の前後の、2つの領域に区画すれば良い。また、ベルトの蛇行を防止するだけで良ければ、ベルト長手方向へ延びる直線によって磁石面をベルト幅方向の左右の、2つの領域に区画すれば良い。また、磁石面の一点を通る複数の直線で磁石面を6つ以上の偶数領域に区画するようにしても良い。ここで、上記一点は磁石面の中心とすることが好ましい。
【図面の簡単な説明】
【0018】
【図1】本発明の移動駆動機構をベルト駆動に適用した例を示す側面図である。
【図2】ベルト裏面の部分拡大平面図である。
【図3】シート磁石の斜視図である。
【図4】ベルトに接する駆動輪外周部の断面図である。
【図5】シート磁石の他の例を示す斜視図である。
【図6】シート磁石のさらに他の例を示す斜視図である。
【符号の説明】
【0019】
1…ベルト(被回転体)、3…シート磁石(従動側磁石体)、31,32,33,34…領域、4…駆動輪(回転体)、5…ボンド磁石(駆動側磁石体)。
【技術分野】
【0001】
本発明は移動駆動機構に関し、特に、磁力を使用してベルト等を移動させる移動駆動機構に関する。
【背景技術】
【0002】
従来、搬送用ベルト等の移動駆動機構としては駆動モータにより回転させられる駆動プーリでベルトを移動させるものが多用されている。しかし、このような移動駆動機構はベルトとプーリ外周の摩擦力で駆動するものであるため、プーリの外周等に油や水が付着すると摩擦力が低下してベルトの移動速度が不安定になり、ベルトの移動精度が低下するという問題がある。そこで、特許文献1には、ベルトに磁性粉を混入してその長手方向へN極とS極を交互に着磁するとともに、ベルト表面に対向させて長手方向へ複数の電磁石を配設して、これら電磁石に適宜通電してベルトを吸引移動させるものが示されている。
【特許文献1】特開2001−187624
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、上記電磁石を使用した従来の移動駆動機構では電磁石のための比較的複雑な通電制御回路を必要とするとともに、用途によっては電磁石から発せられる電磁ノイズが悪影響を与えるという問題があった。
【0004】
そこで、本発明はこのような課題を解決するもので、電磁ノイズ等の発生がなく精度の良い移動駆動を可能とする移動駆動機構を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本第1発明では、移動する駆動側磁石体(5)と、駆動側磁石体(5)に吸引されてこれと同方向へ移動させられる従動側磁石体(3)とを備え、各磁石体(3,5)の対向面は複数領域(31〜34)に区画されるとともに、隣接した各領域(31〜34)に互いに異なる磁極が形成されている。
【0006】
本第1発明においては、駆動側磁石体と従動側磁石体の対向面に形成された各領域のうち同一磁極領域は反発し、異なる磁極領域は吸引される。したがって、従動側磁石体は駆動側磁石体に対してずれを生じることなく常に所定の姿勢で吸着されることになり、精度よく移動させられる。また、電磁石を使用しないから、電磁ノイズ等の発生のおそれがない。
【0007】
本第2発明では、上記領域(31〜34)は、少なくとも移動方向の前後ないし移動方向に直交する方向の左右に区画されている。本第2発明においては、従動側磁石体が移動する際の、移動方向での位置ずれの発生、あるいは移動方向に直交する方向での位置ずれの発生が少なくとも防止される。
【0008】
本第3発明では、上記領域(31〜34)は、上記対向面の中心(O)を通る直線(L1,L2,L3,L4)によって面積の等しい2以上の偶数領域に区画されている。本第3発明によれば、領域の区画を容易に行うことができる。
【0009】
本第4発明では、上記駆動側磁石体(5)は回転体(4)の周面に間隔をおいて複数設けられており、上記従動側磁石体(3)は、回転体(4)の周面に接する被回転体(1)の周面に間隔をおいて複数設けられている。なお、上記被回転体は搬送用のベルトとすることができる。本第4発明においては、位置ずれの無い精度の良い回転移動が実現される。
【0010】
なお、上記カッコ内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【発明の効果】
【0011】
以上のように、本発明の移動駆動機構によれば、電磁ノイズ等の発生がなく精度の良い移動駆動を実現することができる。
【発明を実施するための最良の形態】
【0012】
図1には本発明の移動駆動機構をベルト駆動に適用した例を示す。図1において、一対のプーリ21,22間に懸架されて被回転体としてのベルト1が配設されている。ベルト1は例えば0.5mm厚程度の樹脂製のもので、電子部品、食品、医薬等の、清浄度と移動精度を要求されるものを搬送する。上記ベルト1の裏面には一定間隔で従動側磁石体としてのシート磁石3が接着されている。シート磁石3は0.4mm厚程度のもので、バインダと磁性材を混合し、混練加工してシート状にしたものである。なお、図1は理解を容易にするために、実寸とは相違して描いてある。
【0013】
ここで、上記シート磁石3に使用されるバインダとしては、プーリ21,22部分でのベルト反転の際の屈曲に対し十分な耐性を有する、NBR,SBR等のゴムや、ウレタン系あるいはポリエステル系のエラストマ等が使用できる。また、磁性材としては、フェライト系、NeFeB系、SmFeN系、あるいはSmCo系等の磁性粉が使用できる。シートへの成形は、ゴムの場合には加圧ニーダ後、カレンダ加工を行い、エラストマの場合は、押出し成形後、カレンダ加工する。このようなシート磁石3は柔軟性と耐摩耗性、耐水性を備える樹脂材で被覆しておくのが望ましく、樹脂材としては、シリコン樹脂、ウレタン樹脂、フッ素樹脂等が使用できる。
【0014】
ベルト1裏面に接着された上記シート磁石3は図2に示すように長方形状をなして、ベルト1の中央にその長手方向へ等間隔で配設されている。ベルト1裏面に接着されたシート磁石3の表面は、中心O(図3)を通り互いに直交する直線L1,L2によって等面積の4つの領域31,32,33,34に区画されており、隣接する領域31〜34は互いに異なる極N,Sに着磁されている。これにより、シート磁石3の表面は、移動方向(図中の矢印)の前後と移動方向に直交する方向の左右で、互いに異なる極に区画されている。
【0015】
図1において、ベルト1の一端上面に接して回転体としての駆動輪4が設けられており、この駆動輪4は図略のモータによって図中矢印の方向へ回転させられている。駆動輪4の外周には駆動側磁石体としての一定厚のボンド磁石5が上記シート磁石3の間隔と同間隔で周方向へ設けられている。ボンド磁石5はバインダと磁性材を混合して圧縮成形や射出成形で一定形状としたもので、バインダとしては、確実にベルト1側のシート磁石3を吸着移動させるために十分な剛性を有するPA12,PA6,PPS等の熱可塑性樹脂、あるいはエポキシ樹脂やフェノール樹脂等の熱硬化性樹脂等が使用できる。また、磁性材としてはフェライト系、NeFeB系、SmFeN系、あるいはSmCo系等の磁性粉が使用できる。駆動輪4へのボンド磁石5の取り付けは、例えばボンド磁石5の外周に樹脂製磁石ホルダ51を射出成形してこれらを一体化し、磁石ホルダ51を駆動輪4の外周に機械的に取り付ける等の手段が採用できる。
【0016】
駆動輪4の外周に設けた上記ボンド磁石5は、ベルト面に接しシート磁石3と対向する面がこれと同形としてあり、かつ、当該対向面はシート磁石3と同様に4つの領域に区画されて、各領域がシート磁石3とは互いに異なる極に着磁されている。駆動輪4の回転に伴って移動する(図4矢印)ボンド磁石5がベルト1を介してシート磁石3を吸着すると、シート磁石3と一体のベルト1部分に推進力が付与されてベルト1全体が同方向へ移動させられる。この時、対向するシート磁石3とボンド磁石5は、同極領域は互いに反発し異極領域が互いに吸引されるから、両磁石3,5は、対向する表面の中心O(図3)が一致するように互いに吸着する。これにより、ベルト1は長手方向と幅方向で駆動輪4に対しブレることなく正確に位置決めされた状態で移動させられる。これにより、ベルト1のスリップによる空送りやその蛇行が防止される。
【0017】
なお、シート磁石3およびボンド磁石5の外形は長方形に限られず、図5に示すような円形や、その他、四角形、楕円等であっても良い。また、図6に示すように、長方形の対角線L3,L4によって磁石面を4つの領域35,36,37,38に区画して、これによってベルト1長手方向の前後とベルト1幅方向の左右に領域35,37と36,38を区画するようにしても良い。さらに、スリップによるベルト1の空送りを防止するだけで良ければ、ベルト1の幅方向へ延びる直線によって磁石面をベルト長手方向の前後の、2つの領域に区画すれば良い。また、ベルトの蛇行を防止するだけで良ければ、ベルト長手方向へ延びる直線によって磁石面をベルト幅方向の左右の、2つの領域に区画すれば良い。また、磁石面の一点を通る複数の直線で磁石面を6つ以上の偶数領域に区画するようにしても良い。ここで、上記一点は磁石面の中心とすることが好ましい。
【図面の簡単な説明】
【0018】
【図1】本発明の移動駆動機構をベルト駆動に適用した例を示す側面図である。
【図2】ベルト裏面の部分拡大平面図である。
【図3】シート磁石の斜視図である。
【図4】ベルトに接する駆動輪外周部の断面図である。
【図5】シート磁石の他の例を示す斜視図である。
【図6】シート磁石のさらに他の例を示す斜視図である。
【符号の説明】
【0019】
1…ベルト(被回転体)、3…シート磁石(従動側磁石体)、31,32,33,34…領域、4…駆動輪(回転体)、5…ボンド磁石(駆動側磁石体)。
【特許請求の範囲】
【請求項1】
移動する駆動側磁石体と、前記駆動側磁石体に吸引されてこれと同方向へ移動させられる従動側磁石体とを備え、前記各磁石体の対向面は複数領域に区画されるとともに、隣接した各領域に互いに異なる磁極が形成されている移動駆動機構。
【請求項2】
前記領域は、少なくとも移動方向の前後ないし移動方向に直交する方向の左右に区画されている請求項1に記載の移動駆動機構。
【請求項3】
前記領域は、前記対向面の中心を通る直線によって面積の等しい2以上の偶数領域に区画されている請求項1又は2に記載の移動駆動機構。
【請求項4】
前記駆動側磁石体は回転体の周面に間隔をおいて複数設けられており、前記従動側磁石体は、前記回転体の周面に接する被回転体の周面に間隔をおいて複数設けられている請求項1ないし3のいずれかに一つに記載の移動駆動機構。
【請求項1】
移動する駆動側磁石体と、前記駆動側磁石体に吸引されてこれと同方向へ移動させられる従動側磁石体とを備え、前記各磁石体の対向面は複数領域に区画されるとともに、隣接した各領域に互いに異なる磁極が形成されている移動駆動機構。
【請求項2】
前記領域は、少なくとも移動方向の前後ないし移動方向に直交する方向の左右に区画されている請求項1に記載の移動駆動機構。
【請求項3】
前記領域は、前記対向面の中心を通る直線によって面積の等しい2以上の偶数領域に区画されている請求項1又は2に記載の移動駆動機構。
【請求項4】
前記駆動側磁石体は回転体の周面に間隔をおいて複数設けられており、前記従動側磁石体は、前記回転体の周面に接する被回転体の周面に間隔をおいて複数設けられている請求項1ないし3のいずれかに一つに記載の移動駆動機構。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−46275(P2009−46275A)
【公開日】平成21年3月5日(2009.3.5)
【国際特許分類】
【出願番号】特願2007−215556(P2007−215556)
【出願日】平成19年8月22日(2007.8.22)
【出願人】(595181210)株式会社ダイドー電子 (41)
【Fターム(参考)】
【公開日】平成21年3月5日(2009.3.5)
【国際特許分類】
【出願日】平成19年8月22日(2007.8.22)
【出願人】(595181210)株式会社ダイドー電子 (41)
【Fターム(参考)】
[ Back to top ]