
移植機
【課題】弾性部材により作動体を植付作業機が上昇する側へ付勢し、植付作業機の所定高さ以上への上昇に伴い、弾性部材の付勢力に抗して操作体を非作用位置に回動作動させ且つ植付作業機が昇降停止する回動位置である停止位置に作動体を回動作動させる連動手段を設けた移植機において、メンテナンス性や組付作業性に優れるとともに、植付作業機の昇降範囲を有効に活用できる移植機を提供することを課題としている。
【解決手段】植付作業機6の上記所定高さ以上への上昇に伴って、弾性部材41の弾性力に抗して操作体39を非作用位置に回動作動させる操作体側連動リンク44と、作動体31を停止位置に回動作動させる作動体側連動リンク46とを各別に設け、該操作体側連動リンク44及び作動体側リンク46によって前記連動手段を構成し、作動体31と操作体39の作動範囲が少なくとも一部でラップするように該作動体31及び操作体39を重ねて配置した。
【解決手段】植付作業機6の上記所定高さ以上への上昇に伴って、弾性部材41の弾性力に抗して操作体39を非作用位置に回動作動させる操作体側連動リンク44と、作動体31を停止位置に回動作動させる作動体側連動リンク46とを各別に設け、該操作体側連動リンク44及び作動体側リンク46によって前記連動手段を構成し、作動体31と操作体39の作動範囲が少なくとも一部でラップするように該作動体31及び操作体39を重ねて配置した。
【発明の詳細な説明】
【技術分野】
【0001】
走行機体の後進切換に伴って植付作業機を自動的に上昇駆動させるとともに、上昇駆動した植付作業機を所定高さで自動的に停止させることのできる移植機に関する。
【背景技術】
【0002】
走行機体に昇降リンクを介して昇降可能に連結された植付作業機と、植付作業機を昇降作動させるように回動可能に支持された作動体とを備え、植付作業機の所定高さ以上への上昇に伴い、植付作業機が昇降停止する回動位置である停止位置に作動体を回動作動させる自動停止機構を設けた特許文献1に記載の移植機が従来公知である。
【0003】
また、上記の自動停止機構に加え、回動する操作体を介して植付作業機が上昇する側に作動体を付勢する弾性部材と、前記操作体を作動体に対して非作用な回動位置である非作用位置でロックすることにより、弾性部材の付勢力が作動体に加わらない状態とするロック部材と、走行機体の後進切換に伴ってロック部材による操作体の非作用位置でのロックを解除することにより、弾性部材の付勢力を作動体に作用させる解除機構とを備え、植付作業機の所定高さ以上への上昇に伴い、弾性部材の付勢力に抗して操作体を非作用位置に回動作動させる自動上昇機構を設けた特許文献2に記載の移植機が従来公知である。
【0004】
該構成の移植機は、自動上昇機構により、走行機体の後進切換に連動して植付作業機が自動的に上昇駆動させることができるとともに、自動停止機構により、植付作業機が所定位置まで上昇した場合に、自動的に植付作業機を昇降停止させることができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】実開平5−68215号公報
【特許文献2】特許第4073778号
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、上記文献の移植機は、植付作業機の所定高さ以上への上昇に伴い、弾性部材の付勢力に抗して操作体を非作用位置に回動作動させ且つ植付作業機が昇降停止する回動位置である停止位置に作動体を回動作動させる連動手段として、植付作業機の昇降と連動するワイヤを備え、該ワイヤを介して操作体を回動操作することにより、弾性部材の付勢力に抗して操作体を非作用位置に回動作動させるとともに、該ワイヤ及び操作体を介して植付作業機が昇降停止する回動位置である停止位置に作動体を回動作動させる構成であって、弾性部材の付勢力に抗して操作体を非作業位置に回動作動させるための位置調整と、植付作業機が昇降停止する回動位置である停止位置に作動体を回動させるための位置調整とを、ワイヤによる操作体の操作量の調整のみで行うため、上記の位置調整が容易でなく、メンテナンス性に問題があった。
【0007】
また、上記構成の移植機は、植付作業機の所定高さ以上の上昇に伴い、ワイヤを介して操作体を弾性部材の付勢力に抗して非作用位置に回動させた後、さらに植付作業機が上昇駆動することにより、ワイヤ及び操作体を介して作動体を植付作業機が停止する位置まで回動作動させるため、植付作業機の昇降範囲を有効に活用できないという問題もあった。
【0008】
本発明は、弾性部材の付勢力により作動体を植付作業機が上昇する側へ付勢し、植付作業機の所定高さ以上への上昇に伴い、弾性部材の付勢力に抗して操作体を非作用位置に回動作動させ且つ植付作業機が昇降停止する回動位置である停止位置に作動体を回動作動させる連動手段を設けた移植機において、メンテナンス性や組付作業性に優れるとともに、植付作業機の昇降範囲を有効に活用できる移植機を提供することを課題としている。
【課題を解決するための手段】
【0009】
上記課題を解決するため本発明は、第1に、走行機体3に昇降リンク4を介して昇降可能に連結された植付作業機6と、植付作業機6を昇降作動させるように回動可能に支持された作動体31と、回動する操作体39を介して植付作業機6が上昇する側に作動体31を付勢する弾性部材41と、前記操作体39を作動体31に対して非作用な回動位置である非作用位置でロックすることにより、弾性部材41の付勢力が作動体31に加わらない状態とするロック部材42と、走行機体3の後進切換に伴ってロック部材42による操作体39の非作用位置でのロックを解除することにより、弾性部材41の付勢力を作動体31に作用させる解除機構43とを備え、植付作業機6の所定高さ以上への上昇に伴い、弾性部材41の付勢力に抗して操作体39を非作用位置に回動作動させ且つ植付作業機6が昇降停止する回動位置である停止位置に作動体31を回動作動させる連動手段を設けた移植機において、植付作業機6の上記所定高さ以上への上昇に伴い弾性部材41の弾性力に抗して操作体39を非作用位置に回動作動させる操作体側連動リンク44と、植付作業機6の上記所定高さ以上への上昇に伴い作動体31を停止位置に回動作動させる作動体側連動リンク46とを各別に設け、該操作体側連動リンク44及び作動体側リンク46によって前記連動手段を構成し、作動体31と操作体39の作動範囲が少なくとも一部でラップするように該作動体31及び操作体39を重ね合せるように配置したことを特徴としている。
【0010】
第2に、中途部の支点回りに回動する天秤アーム39によって操作体39を構成し、天秤アーム39の両端部よりも支点寄りの部分に操作体側リンク44を連結したことを特徴としている。
【0011】
第3に、前記作動体31の回動支点と、操作体39の回動支点とを同一軸心上に配置したことを特徴としている。
【発明の効果】
【0012】
上記構成によれば、操作体を非作用位置へ回動作動させる操作体側連動リンクと、作動体を停止位置に回動作動させる作動体側連動リンクとを各別に設け、弾性部材の付勢力に抗して操作体を非作用位置に回動作動させるための位置調整と、植付作業機が昇降停止する回動位置である停止位置に作動体を回動作動させるための位置調整とを別々に行うことができるため、メンテナンス性や組付作業性が向上するとともに、操作体側連動リンク及び作動体側連動リンクの作動範囲が側面視において少なくとも一部でラップするため、各リンクをよりコンパクトに配置することができる。さらに、操作体側連動リンクと作動体側連動リンクを別個に設けたことにより、植付作業機の所定高さ以上への上昇に伴う、弾性部材の付勢力に抗して操作体の非作用位置への回動作動及び、植付作業機が昇降停止する回動位置である停止位置への作動体の回動作動を効率的にできるため、植付作業機の昇降範囲を有効に活用し、走行機体の後進切換に連動して作動体を操作することにより植付作業機を上昇駆動させる自動上昇機構と、植付作業機の上昇駆動を停止させる停止位置に作動体を回動作動させる自動停止機構とを良好に作動させることができる。
また、植付作業機を圃場面に倣って自動的に昇降させる自動昇降範囲を広くとることができるので深田においても良好に植付作業を行うことができる。
【0013】
また、中途部の支点回りに回動する天秤アームによって操作体を構成し、天秤アームの両端部よりも支点寄りの部分に操作体側リンクを連結すれば、天秤アームの両端部に操作体側リンクの作動量を拡大して伝えることができるため、天秤アームの両端部に弾性部材や、作動体との連結部を設けた場合、これらの部材に植付作業機の昇降動作を拡大して伝えることができる。
【0014】
なお、前記作動体の回動支点と、操作体の回動支点とを同一軸心上に配置すれば、作動体及び操作体を、より省スペースで配置できる。
【図面の簡単な説明】
【0015】
【図1】本発明の移植機を適用した乗用田植機の全体側面図である。
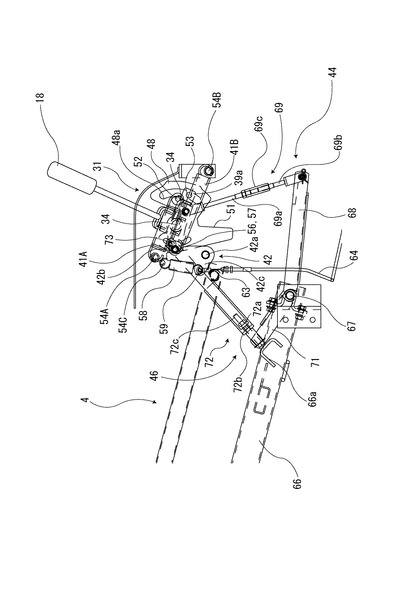
【図2】作業機連動機構を示す全体斜視図である。
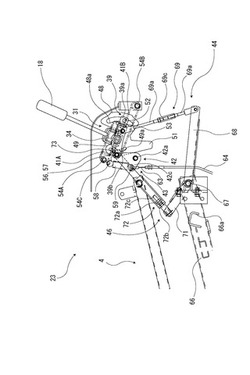
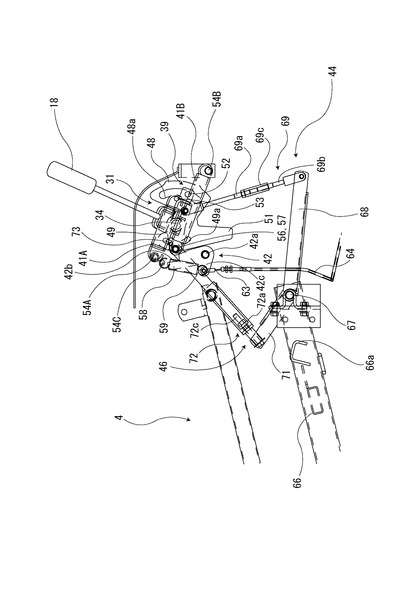
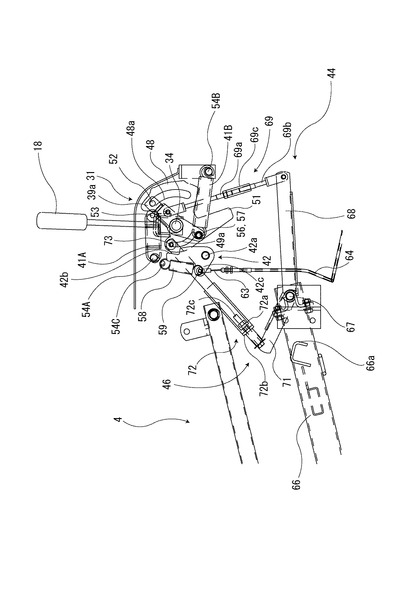
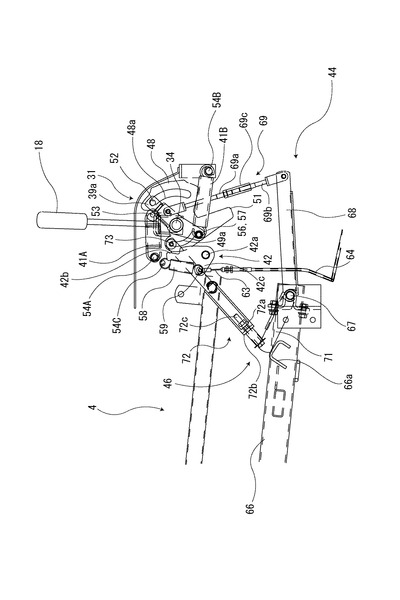
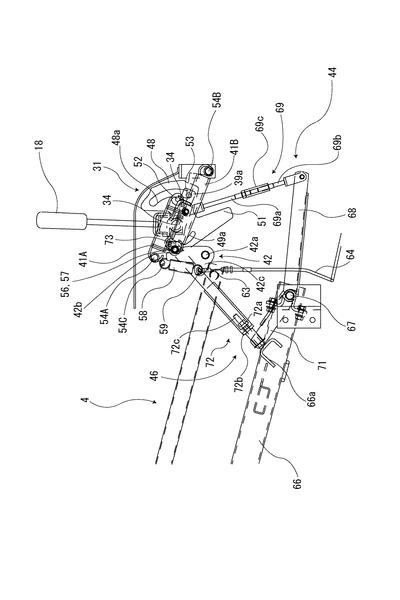
【図3】作業機連動機構の側面図である。
【図4】作業機連動機構の平面図である。
【図5】作業機連動機構の正面図である。
【図6】植付作業時の作業機連動機構を示す要部側面図である。
【図7】植付作業機を下降した状態の作業機連動機構を示す要部側面図である。
【図8】後進変速した時の作業機連動機構を示す要部側面図である。
【図9】作業機レバーが上昇位置へ自動操作された時の作業機連動機構を示す要部側面図である。
【図10】植付作業機の上昇駆動時の作業機連動機構を示す要部側面図である。
【図11】上昇駆動時の引張スプリングの蓄圧を示す要部側面図である。
【図12】自動停止機構により作業機レバーが固定位置へ操作された状態を示す要部側面図である。
【図13】植付作業機の昇降範囲を示す要部側面図である。
【発明を実施するための形態】
【0016】
以下、図示する例に基づき本発明の実施形態について説明する。
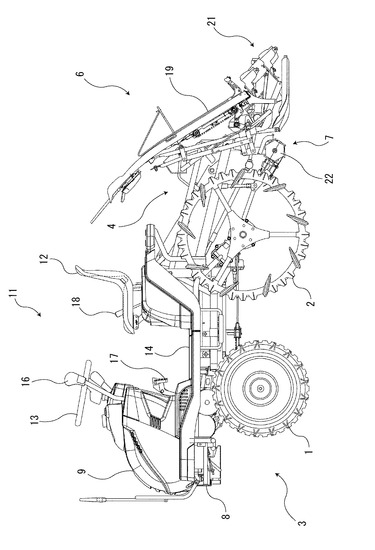
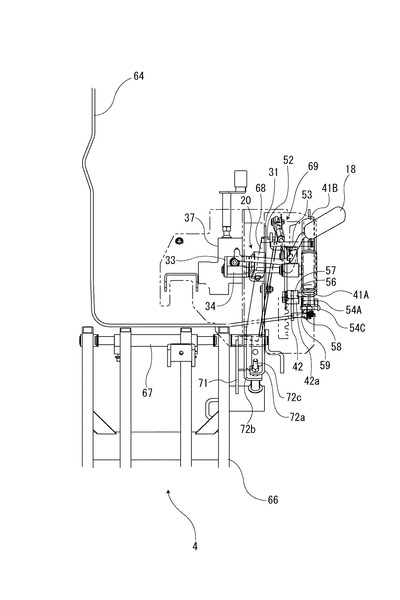
図1は、本発明の移植機を適用した乗用田植機の全体側面図である。本乗用田植機は、左右一対の前輪1,1及び後輪2,2によって支持される走行機体3と、走行機体3の後方に昇降リンク4を介して油圧シリンダにより昇降自在に連結された植付作業機6と、植付作業機6と後輪2との間に配置された左右方向の整地作業機7とを備えている。
【0017】
前記走行機体3を支持する機体フレーム8は、前方側にボンネット9に囲繞されたエンジン(図示しない)が搭載されており、該エンジンの後方側は、作業者が乗込んで操向操作等を行う操縦部11が設けられている。
【0018】
該操縦部11は、作業者が着座する座席12と、操向操作するステアリングハンドル13と、該ステアリングハンドル13の下側のフロアステップ14と、変速機構による変速を操作する変速レバー16と、走行機体3のブレーキ作動を操作するブレーキペダル17と、ガイド孔5により前後方向にガイドされて植付作業機6の昇降操作を行う作業機レバー18とが配置されている。
【0019】
前記植付作業機6は、圃場に植付ける苗が載置される苗載台19と、該苗載台19に載置された苗の圃場への植付作業を行う植付部21とを備え、前記整地作業機7は、角柱状の整地ロータ22を備えている。これにより、本乗用田植機は、植付作業時の機体旋回等により荒れた圃場を、前記整地作業機7によって整地し、該植付作業機6を用いて整地後の圃場に苗を植付けるように構成されている。これにより、本乗用田植機は、植付作業時の機体旋回等により荒れた圃場を、前記整地作業機7によって整地し、該植付作業機6を用いて整地後の圃場に苗を植付けることができる。
【0020】
また、植付作業機6は、走行機体3側又は植付作業機6側に設けられた植付作業機6側の駆動力の入切を行う植付クラッチ(図示しない)により、動力の断続が行われている。該植付クラッチは、上記作業機レバー18の前後揺動操作することによって、作業機連動機構23を介して入切操作されるため、該作業機レバー18により植付作業機6の駆動力が断続操作されるように構成されている。
【0021】
さらに、植付作業機6の昇降は、図示しない油圧シリンダからなる昇降シリンダ10の伸縮によって、昇降リンク4を介して行われている。該昇降シリンダ10の伸縮作動は、前記作業機レバー18を前後揺動操作と、作業機連動機構23を介して機械的に連動している。
【0022】
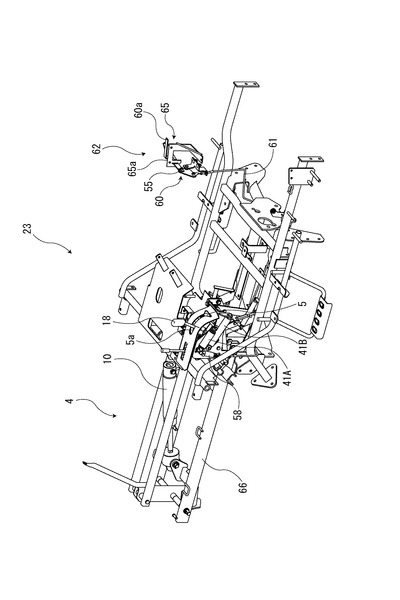
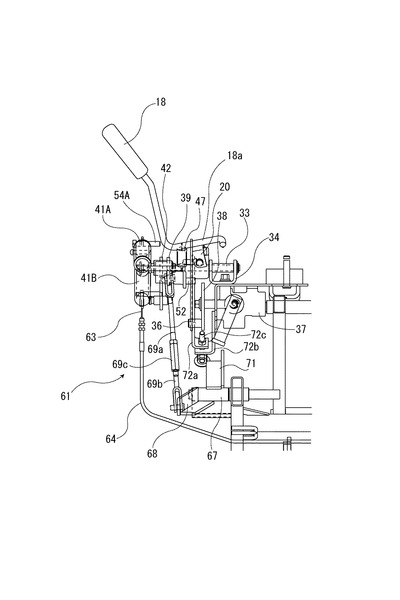
図2は、作業機連動機構を示す全体斜視図である。図示する作業機連動機構23は、
作業機レバー18を前方(下方)側へ揺動操作することによって、植付作業機6が下降され、作業機レバー18を後方(上方)側へ揺動操作することによって、植付作業機6が上昇するように構成されている。
【0023】
また、作業機連動機構23は、作業機レバー18を後方の作業機上昇側である上昇位置へ操作して、植付作業機6を上昇させ、該植付作業機6が所定の昇降位置となると、作業機レバー18が上昇位置から自動的に前方側へ戻されるとともに、ガイド孔5の前後中間位置の右側部に形成された固定孔5aである固定位置に弾力的に位置決めするレバー戻し機構により、植付作業機6を所定高さで固定する自動停止機構が設けられている。
【0024】
さらに、作業機連動機構23は、変速レバー16の後進切換することにより、自動的に作業機レバー18を後方側に操作させ、植付作業機6の駆動を切るとともに、植付作業機6を自動的に上昇させる自動上昇機構が設けられている。以下、作業機連動機構23の構成について説明する。
【0025】
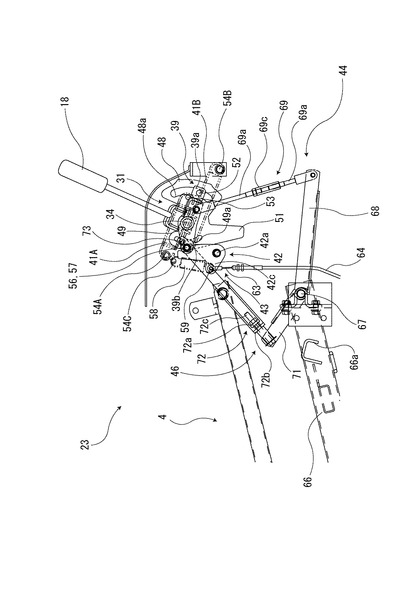
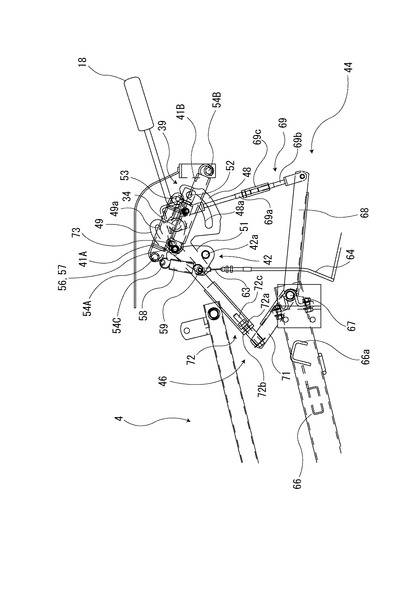
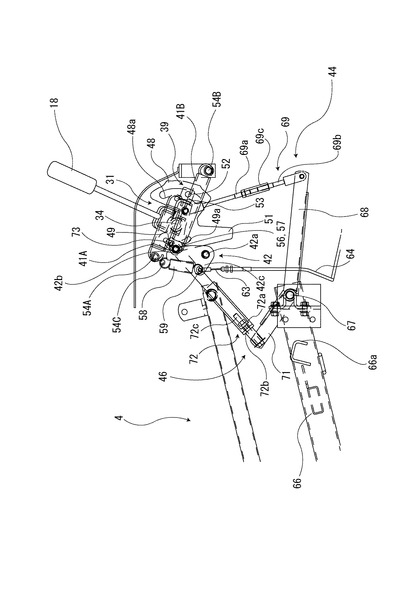
次に、図2乃至5に基づいて、作業機連動機構について説明する。図3乃至5は、作業機連動機構の側面図、平面図及び正面図である。図より、作業機連動機構23は、前記作業機レバー18と、該作業機レバーの基端部側に取付けられて作業機レバーと一体的に回動するように取付けられた作動カム(作動体)31と、該作動カム31の回動支点となり、走行機体3側に取付けられた逆U字型の支持部材33を貫通するように回動自在に軸支された左右方向に延びる回動軸34と、前記昇降シリンダ10に油圧の供給・排出を行う油圧バルブ37を操作するバルブアーム38に設けられて前記作動カム31に当接する当接ピン36とを備えている。
【0026】
また、作業機連動機構23は、前記自動上昇機構として、作動カム31と同様に上記回動軸34を支点に回動自在に軸支されるとともに、回動軸34の前方側に延びる前アーム39a及び後方側に延びる後アーム39bとが形成された回動アーム(操作体)39と、前記回動アーム39を付勢することにより作動カム31を介して作業機レバー18を後方揺動する側に操作する上下一対の引張スプリング(弾性部材)41である上側スプリング41A及び下側スプリング41Bと、該引張スプリング41により付勢された回動アーム39が回動しないようにロックするロック部材42と、該ロック部材42による回動アーム39のロックを解除する解除機構43と、植付作業機6の上昇作動に伴って、前記引張スプリング41に付勢力を蓄積させる回動アーム側リンク(操作体側連動リンク)44とを備えている。
【0027】
さらに、作業機連動機構23は、前記自動停止機構として、植付作業機6が所定位置まで上昇した際に、作業機レバー18を上昇位置から固定位置に操作するレバー戻し機構を構成し、前記作動カム31を自動的に操作する作動カム側リンク(作動体側連動リンク)46が設けられている。
【0028】
前記作業機レバー18は、把持部側を走行機体外側に向けて傾斜させ、中途部を走行機体内側へ向けてL字型に屈曲して水平部18aを形成されている。該水平部18aの中途部を走行機体側に取付け、該取付け位置よりも屈曲部側(走行機体外側)をレバースプリング47により下方側に付勢している。これにより、作業機レバー18は、常時走行機体3外側に向けて付勢されている。また、作業機レバー18は、屈曲部側には下方が開放されたコの字型の取付部材20が設けられており、該取付部材20により前記回動軸34を挟むようにして一体回動するように取付けられている。
【0029】
前記作動カム31は、回動軸34の前方側及び後方側は扇状にそれぞれ延設されて前扇型部48と後扇型部49が形成されており、該後扇型部49の下方側は当接部51が延設されている。そして、該当接部51の前面側には、前記当接ピン36が当接するように配置されている。
【0030】
また、前記当接ピン36は、作動カム31の当接部51の前方側に配置されており、該当接ピン36と当接して回動操作されるバルブアーム38と、該バルブアーム38に操作される油圧バルブ37とは、作動カム31の左右内側(走行機体側)に設けられている。したがって、作業機レバー18の上昇位置側(後側)への操作に伴って作動カム31の当接部51が前方回動することにより、当接部51に当接した当接ピン36が前方側へ揺動操作され、バルブアーム38を介して油圧バルブ37が操作されるように構成されている。
【0031】
なお、前記作動カム31の前扇型部48は、回動アーム39が所定の範囲内で作動カム31から独立して回動可能となるようにするため、回動軸34を中心とした円弧状の前融通孔48aが穿設されている。また、作動カム31の後扇型部49には、作動カム側リンク46と連結される、回動軸34を中心とした円弧状の後融通孔49aが穿設されている。
【0032】
前記回動アーム39は、作動カム31より左右方向外側(図示する例では右側、以下右側)で回動軸34に軸支されている。すなわち、回動アーム39と前記作動カム31は同じ回動軸34を軸に回動作動するため、側面視で回動作動する範囲が互いに必ずラップするように構成されている。
【0033】
また、前アーム39aの端部側には、作動カム31側である左右内側(図示する例では左側、以下左側)に突出した前融通ピン52が設けられており、該前融通ピン52は、前記作動カム31に設けた前融通孔48aに挿通されている。
【0034】
前記前アーム39aの前融通ピン52の近傍には、右側に向けて、前記上側スプリング41Aの一端側が係止される前アーム側係止ピン53が突設されている。該上側スプリング41Aの他端側は、走行機体3側であって、回動軸34(作動カム31)の後方上側に設けられた機体側係止ピン54Aによって係止されており、上側スプリング41Aは、回動軸34の支点(以下、回動支点)の上側に設けられている。これにより、上側スプリング41Aは、前アーム39aの端部側を回動支点の後方上側に向けて付勢することにより、回動アーム39を右側面視で反時計周りに回動するように付勢している。
【0035】
一方、前記後アーム39bの端部側には、右側に向けて、前記下側スプリング41Bの一端側が係止される後アーム側係止ピン56が突設されている。該下側スプリング41Bの他端側は、走行機体3側であって、回動軸34(作動カム31)の前方下側に設けられた機体側係止ピン54Bによって係止されており、下側スプリング41Bは、回動支点の下側に設けられている。これにより、下側スプリング41Bは、後アーム39bの端部側を回動軸34の前方下側に付勢することにより、回動アーム39を右側面視で反時計周りに回動するように付勢している。
【0036】
したがって、上側スプリング41Aと下側スプリング41Bとは、回動軸34の回動支点を挟んで対向するように配置するとともに、逆方向に付勢力が働くように設けられている。これにより、上側スプリング41A及び下側スプリング41Bは、回動アーム39を効率良く回動作動させることができるため、回動アーム39は、引張スプリング41の付勢力により作業機レバー18を一気に後方側へ操作することができるとともに、該引張スプリング41の付勢力を必要最低限に抑えることができるため、手動による作業機レバーの後方側への操作性が向上し、各引張スプリング41の組付け作業もより容易になる。
【0037】
また、上側スプリング41Aと下側スプリング41Bとは、側面視で作動カム31の回動範囲内にほとんどが納まるように配置されているため、各引張スプリング41がコンパクトに配置されている。
【0038】
前記ロック部材42は、走行機体3側であって、回動軸34の後方下側に設けたロック軸42aに回動自在に軸支されており、前記後アーム側係止ピン56の基端側を先端側に比較して太くして形成されたロック部57と当接する。詳しくは、ロック部材42は、ロック軸42aから上方に向って延設されており、前記ロック部57と当接する上端前側はL字状に切欠かれたロック当接部42bが形成されている。これにより、引張スプリング41により下方に付勢された後アーム39bのロック部57と、ロック部材42のロック当接部42bとが当接し、引張スプリング41により付勢された回動アーム39の回動を規制する。
【0039】
また、該ロック部材42は、ロック部材42を回動アーム39側へ付勢するロック用スプリング58が設けられている。ロック部材42は、ロック軸42aの後方側に向かって張出部42cが張出し形成されており、該張出部42cにロック側係止ピン59が突設されている。該ロック側係止ピン59に前記ロック用スプリング58の下端側が係止されており、該ロック用スプリング58の上端側は、走行機体3側であって、前記張出部42cの上方前側に設けた機体側係止ピン54Cに係止されている。これにより、ロック部材42は、ロック用スプリング58により、右側面視で時計周りに回動するように付勢されている。
【0040】
前記解除機構43は、ロック部材42を後方揺動させてロック部材42のロック当接部42bと回動アーム39のロック部57との当接を解除するワイヤ61により構成されている。該ワイヤ61は、前記ロック部材42のロック側係止ピン59と、変速レバー16の基端側に設けた連動部62とを連結するインナーワイヤ63と、該インナーワイヤ63を内装して走行機体3側に固定されるアウタ64とを備えている。
【0041】
このとき、変速レバー16が後進操作されると、インナーワイヤ63がロック側係止ピン59を下方に引張るように構成されているため、変速レバー16の後進切換に連動してロック側係止ピン59が下方側に引張られることにより、ロック部材42がロック用スプリング58の付勢力に抗して右側面視で半時計周り方向に若干回動する。これにより、ロック部材42のロック当接部42bと回動アーム39のロック部57との当接が解除される。
【0042】
したがって、解除機構43によってロック部材42によるロック解除がされると、引張スプリング41により右側面視で半時計周りに回動するように付勢された回動アーム39が該付勢力にしたがって回動可能となる。
【0043】
なお、上記の連動部62は、図2に示すように、インナーワイヤ63の変速レバー16側端部が連結され、該連結部分の上側に回動支点55が設けられ、該回動支点55から左右方向左側に向けて延設された揺動プレート60と、該揺動プレート60の左右方向の中途部から前方に向けて延設されるガイド部65aが形成されたガイド部材65とを備えている。
【0044】
該揺動プレート60は、ガイド部材65の左側に、ガイド部65aと平行となるように前方に延設される当接ガイド60aが形成されており、変速レバー16の基端側が、揺動プレート60の当接ガイド60aと、ガイド部材65のガイド部65aとの間に配置されるように構成されている。なお、ガイド部材65は走行機体側に固定されている。
【0045】
また、変速レバー16は、前後揺動操作されることにより、前進及び後進操作が行われるが、中立位置においては、左右方向に揺動可能に構成されており、中立位置から後方揺動操作(後進操作)を行う場合には、変速レバー16を左側に揺動させた状態で後方揺動させる必要がある(図示しない)。これにより、誤操作を防止することができる。
【0046】
これにより、変速レバー16を中立位置から後進切換するにあたり、該変速レバー16を左側に揺動操作することにより、変速レバー16の基端側が当接ガイド60aと当接して左側に押出し、揺動プレート60の当接ガイド60a側が回動支点55を軸に下方揺動される。そのため、変速レバー16を後進操作すると、該回動支点55の右下側に連結されたインナーワイヤ63は上方側に引張られ、解除機構42側のインナーワイヤ63の端部がロック部材42を下方に引張るように構成されている。
【0047】
前記回動アーム側リンク44は、昇降リンク4を構成するロアリンク66の基端部側に配置され、左右方向に軸支された揺動軸67と、該揺動軸67の前方側に延設されるとともに、揺動軸67の回転に伴って上下に揺動する前側連結部68と、該前側連結部68の端部側と回動アーム39を連結する連結ロッド69とが設けられている。
【0048】
該連結ロッド69は、前記前アーム39aの前端部と回動軸34との間に連結されている。また、連結ロッド69は、上端が回動アーム39側と連結される上ロッド69aと、下端が前側連結部68側と連結される下ロッド69bと、上ロッドの下端と下ロッドの上端とが挿通・固定するスリーブ状の連結具69cとから構成されている。
【0049】
該回動アーム側リンク44は、植付作業機6の上昇に伴って、揺動軸67が前転方向に回転し、該揺動軸67の前回転に伴って前記前側連結部68が下方揺動し、該前側連結部68の下方揺動に伴って連結ロッド69が下方に引張られ、連結ロッド69の下方移動に伴って回動アーム39が右側面視で時計回りに回動作動される。これにより、回動アーム39が回動アーム側リンク44を介して回動作動されると、前記上側スプリング41Aと下側スプリング41Bとが伸長されて右側面視で回動軸34を挟むようにして上下に配置される。
【0050】
このとき、連結ロッド69の一端側は、前アーム39aの端部側よりも回動軸34寄りの箇所に連結されることにより、連結ロッド69の移動量よりも回動アーム39の端部側はより大きく移動させることができるため、効率良く回動アーム39を回動させることができる。
【0051】
前記作動カム側リンク46は、前記揺動軸67と、該揺動軸67の後方上側に延設されるとともに、揺動軸67の回転に伴って上下に揺動する後側連結部71と、該後側連結部71の端部側から作動カム31側に延びるとともに、前記後方扇型部49と連結されるロッド72とを備えている。
【0052】
該ロッド72は、端部側に後方融通ピン73が設けられており、該後融通ピン73が前記後扇型部49に穿設された前記後融通孔49aに挿通されることにより、作動カム側リンク46が作動カム31と連結されている。すなわち、作動体31は、前扇型部48が回動アーム39と連結され、後扇形部49が作動カム側リンクに連結されている。
【0053】
また、該ロッド72は、上端側に後融通ピン73が取付けられて下端側がL字に屈曲形成された屈曲部72aと、後側連結部71に固定された固定部73bと、該固定部72b側に取付けられて屈曲部72aを摺動可能に連結する連結ネジ72cとを備えており、該連結ネジ72cと屈曲部72aとの連結位置を調整することにより、ロッド72全体の長さを調整できる。
【0054】
これにより、前記レバー戻し機構によって、植付作業機が所定位置より上昇されると、ロッド72を介して作動カム31を前方側へ押操作し、作業機レバー18が固定孔5aまで操作され、これにより植付作業機6が停止する。また、ロッド72の長さを調整することによって、作業機レバー18を操作が開始される植付作業機6の上昇位置を容易に調整することができる。
【0055】
なお、ロッド72が作動カム31に連結されている状態で、植付作業機6の昇降駆動によってロッド72が操作されても、後融通ピン73が後融通孔49a内をスライドする範囲内では、作動カム31は操作されない。また、植付作業機6が固定されている状態で作動カム31(作業機レバー18)が操作された場合も同様に、後融通ピン73が後融通孔19a内をスライドする範囲内では、ロッド72側に操作力は働かない。
【0056】
前記回動アーム側リンク44と、作動カム側リンク46とは、何れも植付作業機6が所定位置よりも上昇することにより、揺動軸67の前回転から別個にリンク作動する(連動手段)。これにより、引張スプリング41への付勢力の蓄圧と、所定位置まで上昇した植付作業機の上昇停止とを、別々のリンクで作動するため、植付作業機6の所定高さ以上への上昇に伴って作動する、回動アーム側リンク44による回動アーム39のロック位置(非作用位置)への回動作動と、作動カム側リンク46による作動カム31の回動作動とを同時に行うことができ、植付作業機の昇降範囲を有効に活用できる。
【0057】
上述の構成により、作業機レバー18が後方側に揺動操作されると、作動カム31の当接部51が前方側に揺動操作され、これに伴って該当接部51が当接ピン36とバルブアーム38を介して油圧バルブ37を操作する。これにより、油圧ポンプ(図示しない)から昇降シリンダ10側へ給油して昇降シリンダ10が伸長作動させ、植付作業機6が昇降リンク4を介して上昇する。
【0058】
一方、作業機レバー18が前方側に揺動操作されると、作動カム31の当接部51が後方側に揺動操作され、これに伴って該当接部51と当接ピン36との当接が解除される。これにより、植付作業機6の自重によって、昇降シリンダ10及び油圧ポンプから排油されて昇降シリンダ10が縮小作動し、植付作業機6が昇降リンク4を介して下降する。また、作業機レバー18を、最前方位置である植付作業位置まで前方揺動操作をすると、植付クラッチが入操作されて植付作業機が駆動される。
【0059】
次に、図6乃至13に基づいて、上述のように構成された自動上昇機構及び自動停止機構の連動について説明する。図6は、植付作業時の作業機連動機構を示す要部側面図であり、図7は、植付作業機を下降した状態の作業機連動機構を示す要部側面図であり、図8は、後進変速した時の作業機連動機構を示す要部側面図であり、図9は、作業機レバーが上昇位置へ自動操作された時の作業機連動機構を示す要部側面図であり、図10は、植付作業機の上昇駆動時の作業機連動機構を示す要部側面図であり、図11は、上昇駆動時の引張スプリングの蓄圧を示す要部側面図であり、図12は、自動停止機構により作業機レバーが固定位置へ操作された状態を示す要部側面図である。
【0060】
まず、図6乃至11に基づき、自動上昇機構について説明する。変速レバー16が前進操作されている状態において、図6に示されるように、作業機レバー18が最前方位置である植付作業位置に操作されていると、植付作業機6が圃場位置まで下降するとともに、植付作業機6の植付クラッチが入操作されて植付作業機6が駆動し、植付作業を行うことができるようになる。
【0061】
このとき、回動アーム39の前融通ピン52は、作動カム31の前融通孔48aの上端に接しており、ロッド72の後融通ピン73は、作動カム31の後融通孔49aの下端側に接しているため、各融通ピン52,73が各融通孔48a,49a内をスライドさせることによって、作業機レバー18及び作動カム31のみを後方(上方)側へ操作し、植付作業機6の上昇や、植付クラッチの切操作をすることができる。
【0062】
つまり、図7に示されるように、作業機レバー18を、植付作業位置から固定孔5aの固定位置へ操作すると、植付クラッチが切操作されて植付作業機6の駆動が停止する。
【0063】
次に、図6又は図7の状態から、走行機体3が停止させて、旋回等を行う場合、変速レバー16を後進変速操作すると、図8に示されるように、前記ワイヤ61がロック用スプリング58の付勢力に抗して下方に引張られてロック部材42が下方回動し、ロック部材42のロック当接部42bと、回動アーム39のロック部57との当接が解除される。
【0064】
これにより、図9に示されるように、上側スプリング41Aと下側スプリング41Bとにより蓄えられていた付勢力により、回動アーム39が右側面視で半時計周りに回動作動される。該回動アーム39は、前融通ピン52が前融通孔48aの上端に到達し、さらにその付勢力が働くことにより、回動アーム39が作動カム31を介して作業機レバー18を最後方(上方)位置である最上昇位置まで自動的に揺動操作する。これにより、図10に示されるように、植付作業機6が上昇駆動される。
【0065】
なお、変速レバー16を前進側に切換えることにより、ロック部材42がロック用スプリング58の付勢力により、回動アーム39をロックする位置まで戻る。
【0066】
次に、図11に示されるように、植付作業機6が所定の高さまで上昇すると、前記回動アーム側リンク44を介して連結ロッド69が下方側に操作される。該連結ロッド69の下方操作により、上側スプリング41Aと下側スプリング41Bの付勢力を放出したことによって右側面視で半時計周りに回動した回動アーム39が、上側スプリング41A及び下側スプリング41Bの付勢力に抗して回動アーム39が時計回りに回動作動され、引張スプリング41に再び付勢力が蓄積される。
【0067】
また、回動アーム39が引張スプリング41の付勢力に抗して時計周りに回動した際に、回動アーム39のロック部57とロック部材42とが当接する。このロック部材42により、新たに引張スプリング41に蓄えられた付勢力により回動アーム39が回動することを規制している。
【0068】
すなわち、変速レバー16による後進操作を行うことにより、予め変形して付勢力が蓄えられた引張スプリング41の付勢力を用いて作業機レバー18を上昇位置へ操作して植付作業機6の上昇させ、植付作業機6が上昇に伴って引張スプリング41を変形させて再び付勢力を蓄積する(自動上昇機構)。
【0069】
次に、図12に基づき自動停止機構について説明すると、植付作業機6が所定の高さまで上昇すると、ロアリンク66の押プレート66aが、作動カム側リンク46のロッド72の固定部72bの下端を前方上側へ向けて押上げる。これにより、ロッド72が作動カム31を介して作業機レバー18を前方側へ操作し、これにより、作業機レバー18を固定位置へ自動的に操作することができる。すなわち、植付作業機6が所定の高さまで上昇した場合、自動的に植付作業機6の上昇が停止する所定の位置に操作される(自動停止機構)。
【0070】
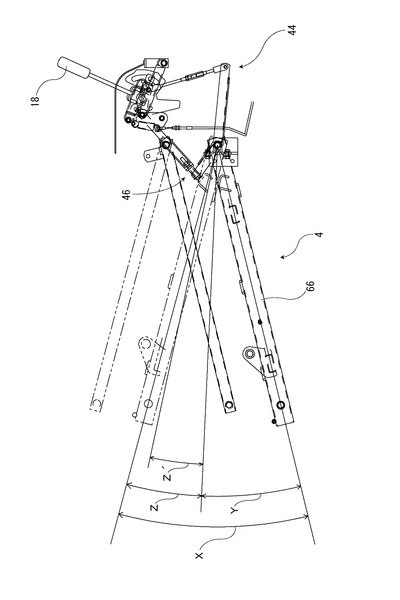
図13は、植付作業機の昇降範囲を示す要部側面図である。図より、範囲Xは、植付作業機の最大昇降範囲を示しており、範囲Yは、植付作業機を圃場面に倣って自動昇降させる自動昇降範囲を示している。範囲Z´は、植付作業機6の上昇に伴う引張スプリング41への付勢力の蓄積が行われる範囲を示しており、範囲Zは植付部の所定位置への上昇に伴い作業機レバー18を固定位置に戻す前記レバー戻し機構の作動範囲を示している。
【0071】
上述の構成によって、自動上昇機構による引張スプリング41への付勢力の蓄積が効率良く行われるため、範囲Yを広くすることができ、深い圃場での植付作業であっても植付作業機6の自動昇降を実行できるため、利便性が高い。
【符号の説明】
【0072】
3 走行機体
4 昇降リンク
6 植付作業機
31 作動カム(作動体)
39 回動アーム(操作体,天秤アーム)
41 引張スプリング(弾性部材)
42 ロック部材
43 解除機構
80 連動手段
44 回動アーム側連動リンク(操作体側リンク)
46 作動カム側連動リンク(作動体側リンク)
【技術分野】
【0001】
走行機体の後進切換に伴って植付作業機を自動的に上昇駆動させるとともに、上昇駆動した植付作業機を所定高さで自動的に停止させることのできる移植機に関する。
【背景技術】
【0002】
走行機体に昇降リンクを介して昇降可能に連結された植付作業機と、植付作業機を昇降作動させるように回動可能に支持された作動体とを備え、植付作業機の所定高さ以上への上昇に伴い、植付作業機が昇降停止する回動位置である停止位置に作動体を回動作動させる自動停止機構を設けた特許文献1に記載の移植機が従来公知である。
【0003】
また、上記の自動停止機構に加え、回動する操作体を介して植付作業機が上昇する側に作動体を付勢する弾性部材と、前記操作体を作動体に対して非作用な回動位置である非作用位置でロックすることにより、弾性部材の付勢力が作動体に加わらない状態とするロック部材と、走行機体の後進切換に伴ってロック部材による操作体の非作用位置でのロックを解除することにより、弾性部材の付勢力を作動体に作用させる解除機構とを備え、植付作業機の所定高さ以上への上昇に伴い、弾性部材の付勢力に抗して操作体を非作用位置に回動作動させる自動上昇機構を設けた特許文献2に記載の移植機が従来公知である。
【0004】
該構成の移植機は、自動上昇機構により、走行機体の後進切換に連動して植付作業機が自動的に上昇駆動させることができるとともに、自動停止機構により、植付作業機が所定位置まで上昇した場合に、自動的に植付作業機を昇降停止させることができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】実開平5−68215号公報
【特許文献2】特許第4073778号
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、上記文献の移植機は、植付作業機の所定高さ以上への上昇に伴い、弾性部材の付勢力に抗して操作体を非作用位置に回動作動させ且つ植付作業機が昇降停止する回動位置である停止位置に作動体を回動作動させる連動手段として、植付作業機の昇降と連動するワイヤを備え、該ワイヤを介して操作体を回動操作することにより、弾性部材の付勢力に抗して操作体を非作用位置に回動作動させるとともに、該ワイヤ及び操作体を介して植付作業機が昇降停止する回動位置である停止位置に作動体を回動作動させる構成であって、弾性部材の付勢力に抗して操作体を非作業位置に回動作動させるための位置調整と、植付作業機が昇降停止する回動位置である停止位置に作動体を回動させるための位置調整とを、ワイヤによる操作体の操作量の調整のみで行うため、上記の位置調整が容易でなく、メンテナンス性に問題があった。
【0007】
また、上記構成の移植機は、植付作業機の所定高さ以上の上昇に伴い、ワイヤを介して操作体を弾性部材の付勢力に抗して非作用位置に回動させた後、さらに植付作業機が上昇駆動することにより、ワイヤ及び操作体を介して作動体を植付作業機が停止する位置まで回動作動させるため、植付作業機の昇降範囲を有効に活用できないという問題もあった。
【0008】
本発明は、弾性部材の付勢力により作動体を植付作業機が上昇する側へ付勢し、植付作業機の所定高さ以上への上昇に伴い、弾性部材の付勢力に抗して操作体を非作用位置に回動作動させ且つ植付作業機が昇降停止する回動位置である停止位置に作動体を回動作動させる連動手段を設けた移植機において、メンテナンス性や組付作業性に優れるとともに、植付作業機の昇降範囲を有効に活用できる移植機を提供することを課題としている。
【課題を解決するための手段】
【0009】
上記課題を解決するため本発明は、第1に、走行機体3に昇降リンク4を介して昇降可能に連結された植付作業機6と、植付作業機6を昇降作動させるように回動可能に支持された作動体31と、回動する操作体39を介して植付作業機6が上昇する側に作動体31を付勢する弾性部材41と、前記操作体39を作動体31に対して非作用な回動位置である非作用位置でロックすることにより、弾性部材41の付勢力が作動体31に加わらない状態とするロック部材42と、走行機体3の後進切換に伴ってロック部材42による操作体39の非作用位置でのロックを解除することにより、弾性部材41の付勢力を作動体31に作用させる解除機構43とを備え、植付作業機6の所定高さ以上への上昇に伴い、弾性部材41の付勢力に抗して操作体39を非作用位置に回動作動させ且つ植付作業機6が昇降停止する回動位置である停止位置に作動体31を回動作動させる連動手段を設けた移植機において、植付作業機6の上記所定高さ以上への上昇に伴い弾性部材41の弾性力に抗して操作体39を非作用位置に回動作動させる操作体側連動リンク44と、植付作業機6の上記所定高さ以上への上昇に伴い作動体31を停止位置に回動作動させる作動体側連動リンク46とを各別に設け、該操作体側連動リンク44及び作動体側リンク46によって前記連動手段を構成し、作動体31と操作体39の作動範囲が少なくとも一部でラップするように該作動体31及び操作体39を重ね合せるように配置したことを特徴としている。
【0010】
第2に、中途部の支点回りに回動する天秤アーム39によって操作体39を構成し、天秤アーム39の両端部よりも支点寄りの部分に操作体側リンク44を連結したことを特徴としている。
【0011】
第3に、前記作動体31の回動支点と、操作体39の回動支点とを同一軸心上に配置したことを特徴としている。
【発明の効果】
【0012】
上記構成によれば、操作体を非作用位置へ回動作動させる操作体側連動リンクと、作動体を停止位置に回動作動させる作動体側連動リンクとを各別に設け、弾性部材の付勢力に抗して操作体を非作用位置に回動作動させるための位置調整と、植付作業機が昇降停止する回動位置である停止位置に作動体を回動作動させるための位置調整とを別々に行うことができるため、メンテナンス性や組付作業性が向上するとともに、操作体側連動リンク及び作動体側連動リンクの作動範囲が側面視において少なくとも一部でラップするため、各リンクをよりコンパクトに配置することができる。さらに、操作体側連動リンクと作動体側連動リンクを別個に設けたことにより、植付作業機の所定高さ以上への上昇に伴う、弾性部材の付勢力に抗して操作体の非作用位置への回動作動及び、植付作業機が昇降停止する回動位置である停止位置への作動体の回動作動を効率的にできるため、植付作業機の昇降範囲を有効に活用し、走行機体の後進切換に連動して作動体を操作することにより植付作業機を上昇駆動させる自動上昇機構と、植付作業機の上昇駆動を停止させる停止位置に作動体を回動作動させる自動停止機構とを良好に作動させることができる。
また、植付作業機を圃場面に倣って自動的に昇降させる自動昇降範囲を広くとることができるので深田においても良好に植付作業を行うことができる。
【0013】
また、中途部の支点回りに回動する天秤アームによって操作体を構成し、天秤アームの両端部よりも支点寄りの部分に操作体側リンクを連結すれば、天秤アームの両端部に操作体側リンクの作動量を拡大して伝えることができるため、天秤アームの両端部に弾性部材や、作動体との連結部を設けた場合、これらの部材に植付作業機の昇降動作を拡大して伝えることができる。
【0014】
なお、前記作動体の回動支点と、操作体の回動支点とを同一軸心上に配置すれば、作動体及び操作体を、より省スペースで配置できる。
【図面の簡単な説明】
【0015】
【図1】本発明の移植機を適用した乗用田植機の全体側面図である。
【図2】作業機連動機構を示す全体斜視図である。
【図3】作業機連動機構の側面図である。
【図4】作業機連動機構の平面図である。
【図5】作業機連動機構の正面図である。
【図6】植付作業時の作業機連動機構を示す要部側面図である。
【図7】植付作業機を下降した状態の作業機連動機構を示す要部側面図である。
【図8】後進変速した時の作業機連動機構を示す要部側面図である。
【図9】作業機レバーが上昇位置へ自動操作された時の作業機連動機構を示す要部側面図である。
【図10】植付作業機の上昇駆動時の作業機連動機構を示す要部側面図である。
【図11】上昇駆動時の引張スプリングの蓄圧を示す要部側面図である。
【図12】自動停止機構により作業機レバーが固定位置へ操作された状態を示す要部側面図である。
【図13】植付作業機の昇降範囲を示す要部側面図である。
【発明を実施するための形態】
【0016】
以下、図示する例に基づき本発明の実施形態について説明する。
図1は、本発明の移植機を適用した乗用田植機の全体側面図である。本乗用田植機は、左右一対の前輪1,1及び後輪2,2によって支持される走行機体3と、走行機体3の後方に昇降リンク4を介して油圧シリンダにより昇降自在に連結された植付作業機6と、植付作業機6と後輪2との間に配置された左右方向の整地作業機7とを備えている。
【0017】
前記走行機体3を支持する機体フレーム8は、前方側にボンネット9に囲繞されたエンジン(図示しない)が搭載されており、該エンジンの後方側は、作業者が乗込んで操向操作等を行う操縦部11が設けられている。
【0018】
該操縦部11は、作業者が着座する座席12と、操向操作するステアリングハンドル13と、該ステアリングハンドル13の下側のフロアステップ14と、変速機構による変速を操作する変速レバー16と、走行機体3のブレーキ作動を操作するブレーキペダル17と、ガイド孔5により前後方向にガイドされて植付作業機6の昇降操作を行う作業機レバー18とが配置されている。
【0019】
前記植付作業機6は、圃場に植付ける苗が載置される苗載台19と、該苗載台19に載置された苗の圃場への植付作業を行う植付部21とを備え、前記整地作業機7は、角柱状の整地ロータ22を備えている。これにより、本乗用田植機は、植付作業時の機体旋回等により荒れた圃場を、前記整地作業機7によって整地し、該植付作業機6を用いて整地後の圃場に苗を植付けるように構成されている。これにより、本乗用田植機は、植付作業時の機体旋回等により荒れた圃場を、前記整地作業機7によって整地し、該植付作業機6を用いて整地後の圃場に苗を植付けることができる。
【0020】
また、植付作業機6は、走行機体3側又は植付作業機6側に設けられた植付作業機6側の駆動力の入切を行う植付クラッチ(図示しない)により、動力の断続が行われている。該植付クラッチは、上記作業機レバー18の前後揺動操作することによって、作業機連動機構23を介して入切操作されるため、該作業機レバー18により植付作業機6の駆動力が断続操作されるように構成されている。
【0021】
さらに、植付作業機6の昇降は、図示しない油圧シリンダからなる昇降シリンダ10の伸縮によって、昇降リンク4を介して行われている。該昇降シリンダ10の伸縮作動は、前記作業機レバー18を前後揺動操作と、作業機連動機構23を介して機械的に連動している。
【0022】
図2は、作業機連動機構を示す全体斜視図である。図示する作業機連動機構23は、
作業機レバー18を前方(下方)側へ揺動操作することによって、植付作業機6が下降され、作業機レバー18を後方(上方)側へ揺動操作することによって、植付作業機6が上昇するように構成されている。
【0023】
また、作業機連動機構23は、作業機レバー18を後方の作業機上昇側である上昇位置へ操作して、植付作業機6を上昇させ、該植付作業機6が所定の昇降位置となると、作業機レバー18が上昇位置から自動的に前方側へ戻されるとともに、ガイド孔5の前後中間位置の右側部に形成された固定孔5aである固定位置に弾力的に位置決めするレバー戻し機構により、植付作業機6を所定高さで固定する自動停止機構が設けられている。
【0024】
さらに、作業機連動機構23は、変速レバー16の後進切換することにより、自動的に作業機レバー18を後方側に操作させ、植付作業機6の駆動を切るとともに、植付作業機6を自動的に上昇させる自動上昇機構が設けられている。以下、作業機連動機構23の構成について説明する。
【0025】
次に、図2乃至5に基づいて、作業機連動機構について説明する。図3乃至5は、作業機連動機構の側面図、平面図及び正面図である。図より、作業機連動機構23は、前記作業機レバー18と、該作業機レバーの基端部側に取付けられて作業機レバーと一体的に回動するように取付けられた作動カム(作動体)31と、該作動カム31の回動支点となり、走行機体3側に取付けられた逆U字型の支持部材33を貫通するように回動自在に軸支された左右方向に延びる回動軸34と、前記昇降シリンダ10に油圧の供給・排出を行う油圧バルブ37を操作するバルブアーム38に設けられて前記作動カム31に当接する当接ピン36とを備えている。
【0026】
また、作業機連動機構23は、前記自動上昇機構として、作動カム31と同様に上記回動軸34を支点に回動自在に軸支されるとともに、回動軸34の前方側に延びる前アーム39a及び後方側に延びる後アーム39bとが形成された回動アーム(操作体)39と、前記回動アーム39を付勢することにより作動カム31を介して作業機レバー18を後方揺動する側に操作する上下一対の引張スプリング(弾性部材)41である上側スプリング41A及び下側スプリング41Bと、該引張スプリング41により付勢された回動アーム39が回動しないようにロックするロック部材42と、該ロック部材42による回動アーム39のロックを解除する解除機構43と、植付作業機6の上昇作動に伴って、前記引張スプリング41に付勢力を蓄積させる回動アーム側リンク(操作体側連動リンク)44とを備えている。
【0027】
さらに、作業機連動機構23は、前記自動停止機構として、植付作業機6が所定位置まで上昇した際に、作業機レバー18を上昇位置から固定位置に操作するレバー戻し機構を構成し、前記作動カム31を自動的に操作する作動カム側リンク(作動体側連動リンク)46が設けられている。
【0028】
前記作業機レバー18は、把持部側を走行機体外側に向けて傾斜させ、中途部を走行機体内側へ向けてL字型に屈曲して水平部18aを形成されている。該水平部18aの中途部を走行機体側に取付け、該取付け位置よりも屈曲部側(走行機体外側)をレバースプリング47により下方側に付勢している。これにより、作業機レバー18は、常時走行機体3外側に向けて付勢されている。また、作業機レバー18は、屈曲部側には下方が開放されたコの字型の取付部材20が設けられており、該取付部材20により前記回動軸34を挟むようにして一体回動するように取付けられている。
【0029】
前記作動カム31は、回動軸34の前方側及び後方側は扇状にそれぞれ延設されて前扇型部48と後扇型部49が形成されており、該後扇型部49の下方側は当接部51が延設されている。そして、該当接部51の前面側には、前記当接ピン36が当接するように配置されている。
【0030】
また、前記当接ピン36は、作動カム31の当接部51の前方側に配置されており、該当接ピン36と当接して回動操作されるバルブアーム38と、該バルブアーム38に操作される油圧バルブ37とは、作動カム31の左右内側(走行機体側)に設けられている。したがって、作業機レバー18の上昇位置側(後側)への操作に伴って作動カム31の当接部51が前方回動することにより、当接部51に当接した当接ピン36が前方側へ揺動操作され、バルブアーム38を介して油圧バルブ37が操作されるように構成されている。
【0031】
なお、前記作動カム31の前扇型部48は、回動アーム39が所定の範囲内で作動カム31から独立して回動可能となるようにするため、回動軸34を中心とした円弧状の前融通孔48aが穿設されている。また、作動カム31の後扇型部49には、作動カム側リンク46と連結される、回動軸34を中心とした円弧状の後融通孔49aが穿設されている。
【0032】
前記回動アーム39は、作動カム31より左右方向外側(図示する例では右側、以下右側)で回動軸34に軸支されている。すなわち、回動アーム39と前記作動カム31は同じ回動軸34を軸に回動作動するため、側面視で回動作動する範囲が互いに必ずラップするように構成されている。
【0033】
また、前アーム39aの端部側には、作動カム31側である左右内側(図示する例では左側、以下左側)に突出した前融通ピン52が設けられており、該前融通ピン52は、前記作動カム31に設けた前融通孔48aに挿通されている。
【0034】
前記前アーム39aの前融通ピン52の近傍には、右側に向けて、前記上側スプリング41Aの一端側が係止される前アーム側係止ピン53が突設されている。該上側スプリング41Aの他端側は、走行機体3側であって、回動軸34(作動カム31)の後方上側に設けられた機体側係止ピン54Aによって係止されており、上側スプリング41Aは、回動軸34の支点(以下、回動支点)の上側に設けられている。これにより、上側スプリング41Aは、前アーム39aの端部側を回動支点の後方上側に向けて付勢することにより、回動アーム39を右側面視で反時計周りに回動するように付勢している。
【0035】
一方、前記後アーム39bの端部側には、右側に向けて、前記下側スプリング41Bの一端側が係止される後アーム側係止ピン56が突設されている。該下側スプリング41Bの他端側は、走行機体3側であって、回動軸34(作動カム31)の前方下側に設けられた機体側係止ピン54Bによって係止されており、下側スプリング41Bは、回動支点の下側に設けられている。これにより、下側スプリング41Bは、後アーム39bの端部側を回動軸34の前方下側に付勢することにより、回動アーム39を右側面視で反時計周りに回動するように付勢している。
【0036】
したがって、上側スプリング41Aと下側スプリング41Bとは、回動軸34の回動支点を挟んで対向するように配置するとともに、逆方向に付勢力が働くように設けられている。これにより、上側スプリング41A及び下側スプリング41Bは、回動アーム39を効率良く回動作動させることができるため、回動アーム39は、引張スプリング41の付勢力により作業機レバー18を一気に後方側へ操作することができるとともに、該引張スプリング41の付勢力を必要最低限に抑えることができるため、手動による作業機レバーの後方側への操作性が向上し、各引張スプリング41の組付け作業もより容易になる。
【0037】
また、上側スプリング41Aと下側スプリング41Bとは、側面視で作動カム31の回動範囲内にほとんどが納まるように配置されているため、各引張スプリング41がコンパクトに配置されている。
【0038】
前記ロック部材42は、走行機体3側であって、回動軸34の後方下側に設けたロック軸42aに回動自在に軸支されており、前記後アーム側係止ピン56の基端側を先端側に比較して太くして形成されたロック部57と当接する。詳しくは、ロック部材42は、ロック軸42aから上方に向って延設されており、前記ロック部57と当接する上端前側はL字状に切欠かれたロック当接部42bが形成されている。これにより、引張スプリング41により下方に付勢された後アーム39bのロック部57と、ロック部材42のロック当接部42bとが当接し、引張スプリング41により付勢された回動アーム39の回動を規制する。
【0039】
また、該ロック部材42は、ロック部材42を回動アーム39側へ付勢するロック用スプリング58が設けられている。ロック部材42は、ロック軸42aの後方側に向かって張出部42cが張出し形成されており、該張出部42cにロック側係止ピン59が突設されている。該ロック側係止ピン59に前記ロック用スプリング58の下端側が係止されており、該ロック用スプリング58の上端側は、走行機体3側であって、前記張出部42cの上方前側に設けた機体側係止ピン54Cに係止されている。これにより、ロック部材42は、ロック用スプリング58により、右側面視で時計周りに回動するように付勢されている。
【0040】
前記解除機構43は、ロック部材42を後方揺動させてロック部材42のロック当接部42bと回動アーム39のロック部57との当接を解除するワイヤ61により構成されている。該ワイヤ61は、前記ロック部材42のロック側係止ピン59と、変速レバー16の基端側に設けた連動部62とを連結するインナーワイヤ63と、該インナーワイヤ63を内装して走行機体3側に固定されるアウタ64とを備えている。
【0041】
このとき、変速レバー16が後進操作されると、インナーワイヤ63がロック側係止ピン59を下方に引張るように構成されているため、変速レバー16の後進切換に連動してロック側係止ピン59が下方側に引張られることにより、ロック部材42がロック用スプリング58の付勢力に抗して右側面視で半時計周り方向に若干回動する。これにより、ロック部材42のロック当接部42bと回動アーム39のロック部57との当接が解除される。
【0042】
したがって、解除機構43によってロック部材42によるロック解除がされると、引張スプリング41により右側面視で半時計周りに回動するように付勢された回動アーム39が該付勢力にしたがって回動可能となる。
【0043】
なお、上記の連動部62は、図2に示すように、インナーワイヤ63の変速レバー16側端部が連結され、該連結部分の上側に回動支点55が設けられ、該回動支点55から左右方向左側に向けて延設された揺動プレート60と、該揺動プレート60の左右方向の中途部から前方に向けて延設されるガイド部65aが形成されたガイド部材65とを備えている。
【0044】
該揺動プレート60は、ガイド部材65の左側に、ガイド部65aと平行となるように前方に延設される当接ガイド60aが形成されており、変速レバー16の基端側が、揺動プレート60の当接ガイド60aと、ガイド部材65のガイド部65aとの間に配置されるように構成されている。なお、ガイド部材65は走行機体側に固定されている。
【0045】
また、変速レバー16は、前後揺動操作されることにより、前進及び後進操作が行われるが、中立位置においては、左右方向に揺動可能に構成されており、中立位置から後方揺動操作(後進操作)を行う場合には、変速レバー16を左側に揺動させた状態で後方揺動させる必要がある(図示しない)。これにより、誤操作を防止することができる。
【0046】
これにより、変速レバー16を中立位置から後進切換するにあたり、該変速レバー16を左側に揺動操作することにより、変速レバー16の基端側が当接ガイド60aと当接して左側に押出し、揺動プレート60の当接ガイド60a側が回動支点55を軸に下方揺動される。そのため、変速レバー16を後進操作すると、該回動支点55の右下側に連結されたインナーワイヤ63は上方側に引張られ、解除機構42側のインナーワイヤ63の端部がロック部材42を下方に引張るように構成されている。
【0047】
前記回動アーム側リンク44は、昇降リンク4を構成するロアリンク66の基端部側に配置され、左右方向に軸支された揺動軸67と、該揺動軸67の前方側に延設されるとともに、揺動軸67の回転に伴って上下に揺動する前側連結部68と、該前側連結部68の端部側と回動アーム39を連結する連結ロッド69とが設けられている。
【0048】
該連結ロッド69は、前記前アーム39aの前端部と回動軸34との間に連結されている。また、連結ロッド69は、上端が回動アーム39側と連結される上ロッド69aと、下端が前側連結部68側と連結される下ロッド69bと、上ロッドの下端と下ロッドの上端とが挿通・固定するスリーブ状の連結具69cとから構成されている。
【0049】
該回動アーム側リンク44は、植付作業機6の上昇に伴って、揺動軸67が前転方向に回転し、該揺動軸67の前回転に伴って前記前側連結部68が下方揺動し、該前側連結部68の下方揺動に伴って連結ロッド69が下方に引張られ、連結ロッド69の下方移動に伴って回動アーム39が右側面視で時計回りに回動作動される。これにより、回動アーム39が回動アーム側リンク44を介して回動作動されると、前記上側スプリング41Aと下側スプリング41Bとが伸長されて右側面視で回動軸34を挟むようにして上下に配置される。
【0050】
このとき、連結ロッド69の一端側は、前アーム39aの端部側よりも回動軸34寄りの箇所に連結されることにより、連結ロッド69の移動量よりも回動アーム39の端部側はより大きく移動させることができるため、効率良く回動アーム39を回動させることができる。
【0051】
前記作動カム側リンク46は、前記揺動軸67と、該揺動軸67の後方上側に延設されるとともに、揺動軸67の回転に伴って上下に揺動する後側連結部71と、該後側連結部71の端部側から作動カム31側に延びるとともに、前記後方扇型部49と連結されるロッド72とを備えている。
【0052】
該ロッド72は、端部側に後方融通ピン73が設けられており、該後融通ピン73が前記後扇型部49に穿設された前記後融通孔49aに挿通されることにより、作動カム側リンク46が作動カム31と連結されている。すなわち、作動体31は、前扇型部48が回動アーム39と連結され、後扇形部49が作動カム側リンクに連結されている。
【0053】
また、該ロッド72は、上端側に後融通ピン73が取付けられて下端側がL字に屈曲形成された屈曲部72aと、後側連結部71に固定された固定部73bと、該固定部72b側に取付けられて屈曲部72aを摺動可能に連結する連結ネジ72cとを備えており、該連結ネジ72cと屈曲部72aとの連結位置を調整することにより、ロッド72全体の長さを調整できる。
【0054】
これにより、前記レバー戻し機構によって、植付作業機が所定位置より上昇されると、ロッド72を介して作動カム31を前方側へ押操作し、作業機レバー18が固定孔5aまで操作され、これにより植付作業機6が停止する。また、ロッド72の長さを調整することによって、作業機レバー18を操作が開始される植付作業機6の上昇位置を容易に調整することができる。
【0055】
なお、ロッド72が作動カム31に連結されている状態で、植付作業機6の昇降駆動によってロッド72が操作されても、後融通ピン73が後融通孔49a内をスライドする範囲内では、作動カム31は操作されない。また、植付作業機6が固定されている状態で作動カム31(作業機レバー18)が操作された場合も同様に、後融通ピン73が後融通孔19a内をスライドする範囲内では、ロッド72側に操作力は働かない。
【0056】
前記回動アーム側リンク44と、作動カム側リンク46とは、何れも植付作業機6が所定位置よりも上昇することにより、揺動軸67の前回転から別個にリンク作動する(連動手段)。これにより、引張スプリング41への付勢力の蓄圧と、所定位置まで上昇した植付作業機の上昇停止とを、別々のリンクで作動するため、植付作業機6の所定高さ以上への上昇に伴って作動する、回動アーム側リンク44による回動アーム39のロック位置(非作用位置)への回動作動と、作動カム側リンク46による作動カム31の回動作動とを同時に行うことができ、植付作業機の昇降範囲を有効に活用できる。
【0057】
上述の構成により、作業機レバー18が後方側に揺動操作されると、作動カム31の当接部51が前方側に揺動操作され、これに伴って該当接部51が当接ピン36とバルブアーム38を介して油圧バルブ37を操作する。これにより、油圧ポンプ(図示しない)から昇降シリンダ10側へ給油して昇降シリンダ10が伸長作動させ、植付作業機6が昇降リンク4を介して上昇する。
【0058】
一方、作業機レバー18が前方側に揺動操作されると、作動カム31の当接部51が後方側に揺動操作され、これに伴って該当接部51と当接ピン36との当接が解除される。これにより、植付作業機6の自重によって、昇降シリンダ10及び油圧ポンプから排油されて昇降シリンダ10が縮小作動し、植付作業機6が昇降リンク4を介して下降する。また、作業機レバー18を、最前方位置である植付作業位置まで前方揺動操作をすると、植付クラッチが入操作されて植付作業機が駆動される。
【0059】
次に、図6乃至13に基づいて、上述のように構成された自動上昇機構及び自動停止機構の連動について説明する。図6は、植付作業時の作業機連動機構を示す要部側面図であり、図7は、植付作業機を下降した状態の作業機連動機構を示す要部側面図であり、図8は、後進変速した時の作業機連動機構を示す要部側面図であり、図9は、作業機レバーが上昇位置へ自動操作された時の作業機連動機構を示す要部側面図であり、図10は、植付作業機の上昇駆動時の作業機連動機構を示す要部側面図であり、図11は、上昇駆動時の引張スプリングの蓄圧を示す要部側面図であり、図12は、自動停止機構により作業機レバーが固定位置へ操作された状態を示す要部側面図である。
【0060】
まず、図6乃至11に基づき、自動上昇機構について説明する。変速レバー16が前進操作されている状態において、図6に示されるように、作業機レバー18が最前方位置である植付作業位置に操作されていると、植付作業機6が圃場位置まで下降するとともに、植付作業機6の植付クラッチが入操作されて植付作業機6が駆動し、植付作業を行うことができるようになる。
【0061】
このとき、回動アーム39の前融通ピン52は、作動カム31の前融通孔48aの上端に接しており、ロッド72の後融通ピン73は、作動カム31の後融通孔49aの下端側に接しているため、各融通ピン52,73が各融通孔48a,49a内をスライドさせることによって、作業機レバー18及び作動カム31のみを後方(上方)側へ操作し、植付作業機6の上昇や、植付クラッチの切操作をすることができる。
【0062】
つまり、図7に示されるように、作業機レバー18を、植付作業位置から固定孔5aの固定位置へ操作すると、植付クラッチが切操作されて植付作業機6の駆動が停止する。
【0063】
次に、図6又は図7の状態から、走行機体3が停止させて、旋回等を行う場合、変速レバー16を後進変速操作すると、図8に示されるように、前記ワイヤ61がロック用スプリング58の付勢力に抗して下方に引張られてロック部材42が下方回動し、ロック部材42のロック当接部42bと、回動アーム39のロック部57との当接が解除される。
【0064】
これにより、図9に示されるように、上側スプリング41Aと下側スプリング41Bとにより蓄えられていた付勢力により、回動アーム39が右側面視で半時計周りに回動作動される。該回動アーム39は、前融通ピン52が前融通孔48aの上端に到達し、さらにその付勢力が働くことにより、回動アーム39が作動カム31を介して作業機レバー18を最後方(上方)位置である最上昇位置まで自動的に揺動操作する。これにより、図10に示されるように、植付作業機6が上昇駆動される。
【0065】
なお、変速レバー16を前進側に切換えることにより、ロック部材42がロック用スプリング58の付勢力により、回動アーム39をロックする位置まで戻る。
【0066】
次に、図11に示されるように、植付作業機6が所定の高さまで上昇すると、前記回動アーム側リンク44を介して連結ロッド69が下方側に操作される。該連結ロッド69の下方操作により、上側スプリング41Aと下側スプリング41Bの付勢力を放出したことによって右側面視で半時計周りに回動した回動アーム39が、上側スプリング41A及び下側スプリング41Bの付勢力に抗して回動アーム39が時計回りに回動作動され、引張スプリング41に再び付勢力が蓄積される。
【0067】
また、回動アーム39が引張スプリング41の付勢力に抗して時計周りに回動した際に、回動アーム39のロック部57とロック部材42とが当接する。このロック部材42により、新たに引張スプリング41に蓄えられた付勢力により回動アーム39が回動することを規制している。
【0068】
すなわち、変速レバー16による後進操作を行うことにより、予め変形して付勢力が蓄えられた引張スプリング41の付勢力を用いて作業機レバー18を上昇位置へ操作して植付作業機6の上昇させ、植付作業機6が上昇に伴って引張スプリング41を変形させて再び付勢力を蓄積する(自動上昇機構)。
【0069】
次に、図12に基づき自動停止機構について説明すると、植付作業機6が所定の高さまで上昇すると、ロアリンク66の押プレート66aが、作動カム側リンク46のロッド72の固定部72bの下端を前方上側へ向けて押上げる。これにより、ロッド72が作動カム31を介して作業機レバー18を前方側へ操作し、これにより、作業機レバー18を固定位置へ自動的に操作することができる。すなわち、植付作業機6が所定の高さまで上昇した場合、自動的に植付作業機6の上昇が停止する所定の位置に操作される(自動停止機構)。
【0070】
図13は、植付作業機の昇降範囲を示す要部側面図である。図より、範囲Xは、植付作業機の最大昇降範囲を示しており、範囲Yは、植付作業機を圃場面に倣って自動昇降させる自動昇降範囲を示している。範囲Z´は、植付作業機6の上昇に伴う引張スプリング41への付勢力の蓄積が行われる範囲を示しており、範囲Zは植付部の所定位置への上昇に伴い作業機レバー18を固定位置に戻す前記レバー戻し機構の作動範囲を示している。
【0071】
上述の構成によって、自動上昇機構による引張スプリング41への付勢力の蓄積が効率良く行われるため、範囲Yを広くすることができ、深い圃場での植付作業であっても植付作業機6の自動昇降を実行できるため、利便性が高い。
【符号の説明】
【0072】
3 走行機体
4 昇降リンク
6 植付作業機
31 作動カム(作動体)
39 回動アーム(操作体,天秤アーム)
41 引張スプリング(弾性部材)
42 ロック部材
43 解除機構
80 連動手段
44 回動アーム側連動リンク(操作体側リンク)
46 作動カム側連動リンク(作動体側リンク)
【特許請求の範囲】
【請求項1】
走行機体(3)に昇降リンク(4)を介して昇降可能に連結された植付作業機(6)と、植付作業機(6)を昇降作動させるように回動可能に支持された作動体(31)と、回動する操作体(39)を介して植付作業機(6)が上昇する側に作動体(31)を付勢する弾性部材(41)と、前記操作体(39)を作動体(31)に対して非作用な回動位置である非作用位置でロックすることにより、弾性部材(41)の付勢力が作動体(31)に加わらない状態とするロック部材(42)と、走行機体(3)の後進切換に伴ってロック部材(42)による操作体(39)の非作用位置でのロックを解除することにより、弾性部材(41)の付勢力を作動体(31)に作用させる解除機構(43)とを備え、植付作業機(6)の所定高さ以上への上昇に伴い、弾性部材(41)の付勢力に抗して操作体(39)を非作用位置に回動作動させ且つ植付作業機(6)が昇降停止する回動位置である停止位置に作動体(31)を回動作動させる連動手段を設けた移植機において、植付作業機(6)の上記所定高さ以上への上昇に伴い弾性部材(41)の弾性力に抗して操作体(39)を非作用位置に回動作動させる操作体側連動リンク(44)と、植付作業機(6)の上記所定高さ以上への上昇に伴い作動体(31)を停止位置に回動作動させる作動体側連動リンク(46)とを各別に設け、該操作体側連動リンク(44)及び作動体側リンク(46)によって前記連動手段を構成し、作動体(31)と操作体(39)の作動範囲が少なくとも一部でラップするように該作動体(31)及び操作体(39)を重ね合せるように配置した移植機。
【請求項2】
中途部の支点回りに回動する天秤アーム(39)によって操作体(39)を構成し、天秤アーム(39)の両端部よりも支点寄りの部分に操作体側リンク(44)を連結した請求項1記載の移植機。
【請求項3】
前記作動体(31)の回動支点と、操作体(39)の回動支点とを同一軸心上に配置した請求項1又は2の何れかに記載の移植機。
【請求項1】
走行機体(3)に昇降リンク(4)を介して昇降可能に連結された植付作業機(6)と、植付作業機(6)を昇降作動させるように回動可能に支持された作動体(31)と、回動する操作体(39)を介して植付作業機(6)が上昇する側に作動体(31)を付勢する弾性部材(41)と、前記操作体(39)を作動体(31)に対して非作用な回動位置である非作用位置でロックすることにより、弾性部材(41)の付勢力が作動体(31)に加わらない状態とするロック部材(42)と、走行機体(3)の後進切換に伴ってロック部材(42)による操作体(39)の非作用位置でのロックを解除することにより、弾性部材(41)の付勢力を作動体(31)に作用させる解除機構(43)とを備え、植付作業機(6)の所定高さ以上への上昇に伴い、弾性部材(41)の付勢力に抗して操作体(39)を非作用位置に回動作動させ且つ植付作業機(6)が昇降停止する回動位置である停止位置に作動体(31)を回動作動させる連動手段を設けた移植機において、植付作業機(6)の上記所定高さ以上への上昇に伴い弾性部材(41)の弾性力に抗して操作体(39)を非作用位置に回動作動させる操作体側連動リンク(44)と、植付作業機(6)の上記所定高さ以上への上昇に伴い作動体(31)を停止位置に回動作動させる作動体側連動リンク(46)とを各別に設け、該操作体側連動リンク(44)及び作動体側リンク(46)によって前記連動手段を構成し、作動体(31)と操作体(39)の作動範囲が少なくとも一部でラップするように該作動体(31)及び操作体(39)を重ね合せるように配置した移植機。
【請求項2】
中途部の支点回りに回動する天秤アーム(39)によって操作体(39)を構成し、天秤アーム(39)の両端部よりも支点寄りの部分に操作体側リンク(44)を連結した請求項1記載の移植機。
【請求項3】
前記作動体(31)の回動支点と、操作体(39)の回動支点とを同一軸心上に配置した請求項1又は2の何れかに記載の移植機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−51918(P2013−51918A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2011−192283(P2011−192283)
【出願日】平成23年9月5日(2011.9.5)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成23年9月5日(2011.9.5)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
[ Back to top ]