
移載機
【課題】小さい駆動力にて所定の位置に位置決め可能な移載機を提供することにある。
【解決手段】無人搬送車40に搭載される移載機本体31を有する移載機30であって、移載機本体31が垂直方向に移動可能な複数のアウトリガ10を有し、アウトリガ10を走行路1に当接させて、移載機本体31を支持させると共に、無人搬送車40から浮き上がらせるようにしたことにより、移載機本体31を所定の位置に位置決めさせると共に、小さい駆動力にてアウトリガ10を駆動させるようにした。
【解決手段】無人搬送車40に搭載される移載機本体31を有する移載機30であって、移載機本体31が垂直方向に移動可能な複数のアウトリガ10を有し、アウトリガ10を走行路1に当接させて、移載機本体31を支持させると共に、無人搬送車40から浮き上がらせるようにしたことにより、移載機本体31を所定の位置に位置決めさせると共に、小さい駆動力にてアウトリガ10を駆動させるようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移載機に関し、特に無人搬送車に搭載され、小さい駆動力にて所定の位置に位置決め可能な移載機に関する。
【背景技術】
【0002】
移載機は、搬送する搬送物品を積載するための昇降可能な積載具を有し、無人搬送車に搭載されている。無人搬送車には四つのキャスタ輪が取り付けられ、そのうち二つには走行路に対して付勢する圧縮コイルばねをキャスタ輪と荷台との間に介在させることで、4つのキャスタ輪を走行路に接地させるようにしている。このような無人搬送車を所定の位置に配置し、前記移載機に前記搬送物品を積載すると、前記搬送物品の自重により前記圧縮コイルばねが収縮して、無人搬送車の配置位置がずれてしまう。このような位置ずれを防止するため無人搬送車にアウトリガを設けており、このアウトリガを走行路に当接させて反力を得ることで、無人搬送車および移載機を所定の位置に配置するようにしている(例えば、特許文献1を参照)。
【0003】
【特許文献1】特開2000−344478号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のような無人搬送車では、アウトリガにより無人搬送車および移載機を所定の位置に位置決めすることができるものの、前記アウトリガは前記移載機の自重を支持するのに加えて、前記無人搬送車の自重をも支持しており、それだけアウトリガを駆動する駆動力が大きい装置が必要になってしまい、その分製造コストが嵩んでしまうという課題があった。
【0005】
そこで、本発明は、上述した問題に鑑み提案されたもので、小さい駆動力にて所定の位置に位置決め可能な移載機を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決する第1の発明に係る移載機は、無人搬送車に搭載される移載機本体を有する移載機であって、前記移載機本体が垂直方向に移動可能な複数のアウトリガを有し、前記アウトリガを走行路に当接させて前記移載機本体を支持させると共に、前記無人搬送車から浮き上がらせるようにしたことを特徴とする。
【0007】
上述した課題を解決する第2の発明に係る移載機は、第1の発明に記載された移載機であって、前記アウトリガのうち少なくとも2つの先端には、前記走行路に配置された係止部に係止可能な被係止部が形成されることを特徴とする。
【0008】
上述した課題を解決する第3の発明に係る移載機は、第1または第2の発明に記載された移載機であって、前記無人搬送車に第2係止部を形成させる一方、前記移載機本体に前記第2係止部に係止可能な第2被係止部を形成させ、前記無人搬送車に前記移載機本体を搭載させるときに、前記無人搬送車の第2係止部を前記移載機本体の第2被係止部に係止させることを特徴とする。
【発明の効果】
【0009】
第1の発明に係る移載機によれば、移載機本体を所定の位置に位置決めさせることができる。アウトリガにより無人搬送車を支持させる必要がなくなるので、その分アウトリガを駆動する駆動力を小さくすることができる。よって、アウトリガを駆動する動力源を従来のものに比べて小さくすることができ、その分製造コストを低減することができる。
【0010】
第2の発明に係る移載機によれば、第1の発明に記載された移載機と同様な作用効果を奏する他、移載機本体を所定の位置に確実に位置決めすることができる。また、係止部を円錐形状とすると共に、被係止部を円錐形状の穴とすることにより、係止部と被係止部とがそれぞれの重なる領域内でずれても、移載機本体の自重が係止部と被係止部との接触面に作用して、係止部の頂点と被係止部の最奥部とが一致させられるので、移載機本体を所定の位置にさらに確実に位置決めすることができる。
【0011】
第3の発明に係る移載機によれば、第1および第2の発明に記載された移載機と同様な作用効果を奏する他、無人搬送車に対する移載機本体の位置ずれを防止することができ、その結果、移載機本体を位置決めするときの位置ずれを防止することができる。また、第2係止部または第2被係止部に近接センサを設けることで、無人搬送車に対して移載機本体が所定の位置に位置決めされたかを確認することができる。
【発明を実施するための最良の形態】
【0012】
以下に、本発明に係る移載機を実施するための最良の形態を実施例に基づき具体的に説明する。
【実施例1】
【0013】
以下に、本発明の第1の実施例に係る移載機について、図を用いて説明する。
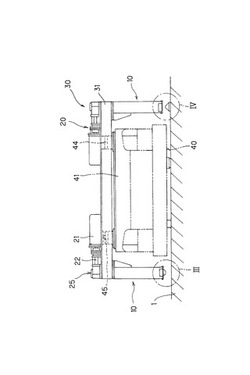
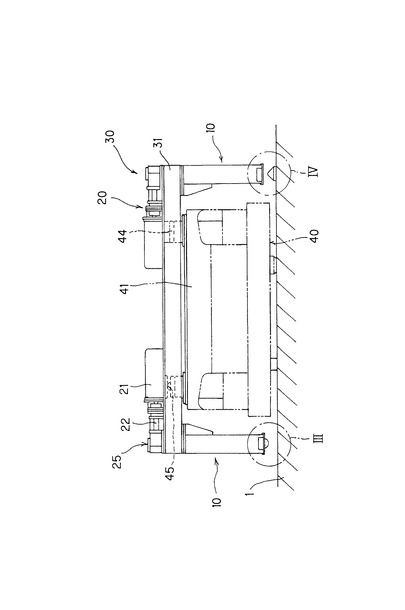
図1は、本発明の第1の実施例に係る移載機の平面図であり、図2は、その正面図である。図3は、図2における囲み線IIIの拡大図であり、図4は、図2における囲み線IVの拡大図である。図5は、本発明の第1の実施例に係る移載機が有するアウトリガ駆動機構の平面図であり、図6は、その正面図である。図7は、本発明の第1の実施例に係る移載機が有する位置検出機構の説明図である。
【0014】
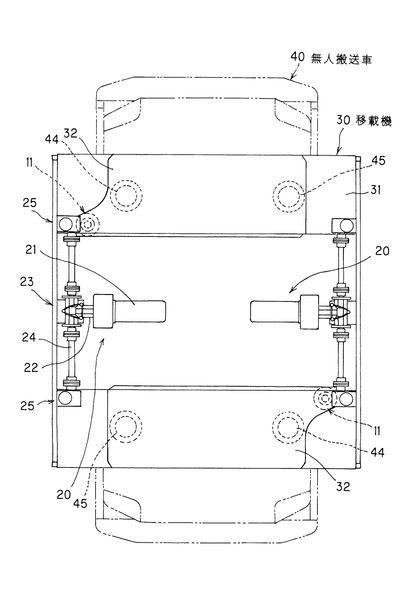
本発明の第1の実施例に係る移載機30は、図1、および図2に示すように、無人搬送車40の荷台41に搭載され、所定の位置に配置された搬送物品であるワーク(図示せず)を持ち上げたり、持ち上げて把持したワークを所定の位置に配置したりするものである。無人搬送車40の荷台41におけるアウトリガ(ジャッキ25)の近傍には、摩擦係数が低い板状のスライドプレート44、および全方位に移動自在なボールキャスタ45がそれぞれ取り付けられる。ここで、スライドプレート44は、無人搬送車40の両側部にそれぞれ配置されると共に、対角に配置される。ボールキャスタ45も、無人搬送車40の両側部にそれぞれ配置されると共に、対角に配置される。
【0015】
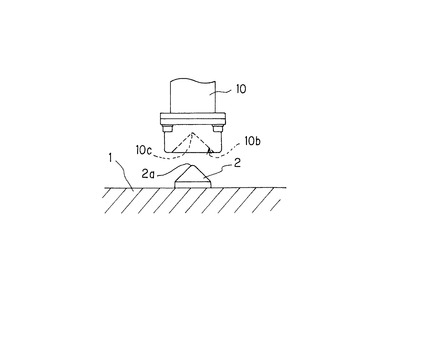
無人搬送車40が走行する走行路1における所定の位置には、図2および図4に示すように、係止部である、上方に突出した円錐形状の凸部2が設けられる。前記係止部は、所定の位置に少なくとも2箇所(図6を参照)設けられる。
【0016】
移載機30は、図1および図2に示すように、略四角形状の移載機本体31と、移載機本体31の各角部近傍の下部に配置されたアウトリガ10と、アウトリガ10を駆動するアウトリガ駆動機構20とを有する。
【0017】
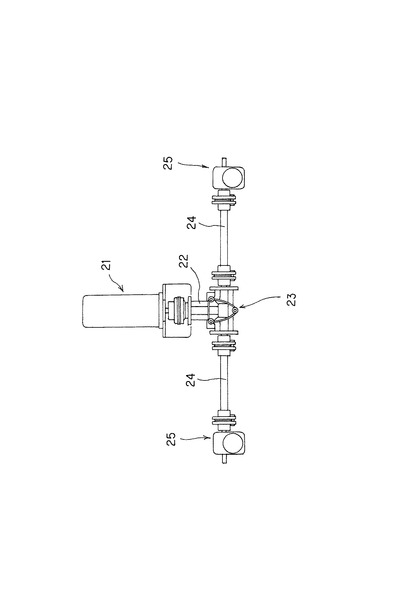
移載機本体31の上部には、ワークを把持可能であり、移載機本体31から突出可能であり、且つ昇降可能であるフォーク32(把持部材)が配置される。移載機本体31の両側には、アウトリガ駆動機構20がそれぞれ配置される。アウトリガ駆動機構20は、駆動源である駆動モータ21と、駆動モータ21から延在する主軸22に連結された直交ディファレンシャル23と、直交ディファレンシャル23に連結された駆動軸24と、駆動軸24に連結されたジャッキ25とを有する。直交ディファレンシャル23により主軸22の回転が、駆動軸24に伝わって当該駆動軸24が回転する。
【0018】
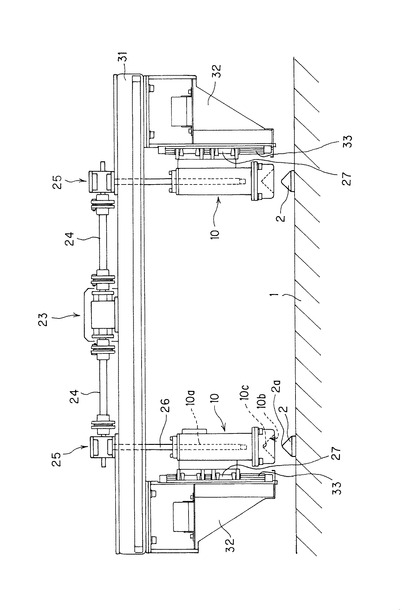
移載機本体31の下部31aには、図6に示すように、垂直下方に延在するガイド部材32が設けられる。ガイド部材32には、垂直下方に延在するレール33が取り付けられる。
【0019】
ジャッキ25には、移載機本体31を貫通して垂直下方に延在し、回転自在な垂直軸26が連結される。垂直軸26には、アウトリガ10に形成された軸穴10aが係止される。すなわち、軸穴10aにはねじ山(図示せず)が形成されており、この軸穴10aに垂直軸26に形成されたねじ山(図示せず)が螺合される。アウトリガ10の一側部には、ガイド部材32のレール33上を移動可能なスライド部材27が固定される。よって、垂直軸26が回転することで、アウトリガ10がレール33に沿って垂直方向に移動する。
【0020】
移載機本体31の一側部側に配置される2つのアウトリガ10の先端には、図2、図4および図6に示すように、走行路1上に配置された係止部2に係止可能な被係止部である、下方に凹んだ穴状の凹部10bが形成される。すなわち、凹部10bは円錐形状に形成されており、凸部2に当接される。よって、係止部および被係止部を上述したような形状にすることにより、ゴミ等が入り込まないようになり、移載機本体31の位置決めの誤差を少なくすることができる。
【0021】
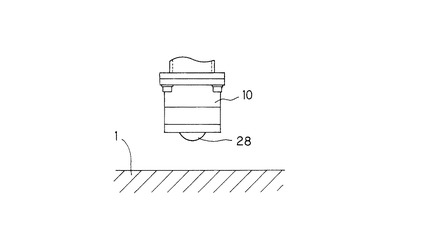
移載機本体31の他側部側に配置される2つのアウトリガ10の先端には、図2および図3に示すように、走行路1上を全方位に走行可能なボールキャスタ28が取り付けられる。
【0022】
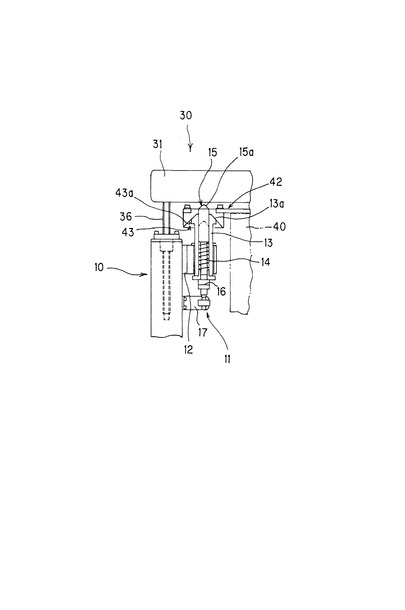
図1に示すように、2つのアウトリガ10に位置検出機構11がそれぞれ取り付けられており、ここでは、移載機本体31の両側に配置され、且つ対角に配置されるアウトリガ10にそれぞれ取り付けられる。位置検出機構11は、図7に示すように、アウトリガ10に固定具12を介して固定され、上下方向に延在するように配置された筒状部材13と、筒状部材13内に配置されると共に、先端15aが上方に向けて配置され、ばね14により上方に向けて付勢された位置検出軸15を有する。なお、位置検出軸15には、近接スイッチ(図示せず)が設けられており、この近接スイッチは無人搬送車40に対して移載機30が所定の位置に配置されたことを検出する。
【0023】
筒状部材13の先端には、下方に向けて外側に延在する傾斜面13aが形成される。筒状部材13の後端は、蓋部材16により閉塞されており、ばね14の下部が蓋部材16に係止される。この蓋部材16は、支持具17によりアウトリガ10に固定される。
【0024】
無人搬送車40における位置検出機構11の近傍には、図1および図7に示すように、側方に延在する側部突出部材42が固定される。この側部突出部材42には、筒状部材13の傾斜面13aに当接する当接面43aを有し、位置検出軸15が突出可能な位置検出穴43が形成される。ただし、位置検出穴43の幅は、係止部である凸部2の幅と略同じ大きさであり、無人搬送車40に対する移載機30の位置ずれを許容できるように形成される。
【0025】
無人搬送車40に移載機30が搭載されるときには、筒状部材13の傾斜面13aが側部突出部材42の位置検出穴43の当接面43aに当接して係止され、位置検出軸15の先端15aが位置検出穴43から突出して配置される。駆動モータ21を駆動すると、最初はアウトリガ10が下方に向けて延びる。それに伴い、筒状部材13および位置検出軸15が下方に移動し、側部突出部材42の位置検出穴43から外に出る。さらに、アウトリガ10を延ばし、走行路1に当接すると、移載機本体31が上方に移動され、無人搬送車40から浮き上がる。アウトリガ10を走行路1に当接させるとき、アウトリガの凹部10bと走行路の凸部2とがその幅以内でずれていても、移載機30の自重が凹部10bを介して凸部2に作用して、ボールキャスタ28により移載機30が横方向に移動し、アウトリガ10の凹部10bにおける最奥部2cと凸部2の先端部2aとが一致するようになり、移載機30が所定の位置に配置されて、位置決めされる。この状態にて、ワークの移載が行われる。
【0026】
続いて、アウトリガ10を縮めていくと、移載機本体31が下方に移動していく。さらにアウトリガ10を縮めていくと、位置検出機構11の筒状部材13および位置検出軸15が側部突出部材42の位置検出穴43内に配置される。さらにアウトリガ10を縮めていくと、移載機本体30が無人搬送車40の荷台41に当接して、搭載される。このとき、筒状部材13の傾斜面13aが位置検出穴43の当接面43aに当接すると共に、位置検出軸15が位置検出穴43の当接面43aに当接する。さらにアウトリガ10を縮めていき、移載機30が無人搬送車40に完全に搭載されると、位置検出穴43の当接面43aを介して、筒状部材13の傾斜面13a、および位置検出軸15の先端15aに作用し、移載機本体31の自重により、無人搬送車40に対して所定の位置に移載機30が配置される。すなわち、位置検出穴43が第2係止部に相当し、筒状部材13および位置検出軸15が第2被係止部に相当する。
【0027】
したがって、本発明の第1の実施例に係る移載機30によれば、移載機本体31を所定の位置に位置決めさせることができる。アウトリガ10により無人搬送車40を支持させる必要がなくなるので、その分アウトリガ10を駆動する駆動力を小さくすることができる。よって、アウトリガ10を駆動する動力源を従来のものに比べて小さくすることができ、その分製造コストを低減することができる。
【0028】
また、2つのアウトリガ10の先端には、走行路1に配置された係止部2に係止可能な被係止部10bを形成したことにより、移載機本体を所定の位置に確実に位置決めすることができる。係止部2を円錐形状とすると共に、被係止部10bを円錐形状の穴とすることにより、係止部2と被係止部10bとが重なる領域内でずれても、移載機本体31の自重が係止部2と被係止部10bとの接触面に作用して、係止部2の頂点2aと被係止部10bの最奥部10cとが一致させられるので、移載機本体31を所定の位置にさらに確実に位置決めすることができる。
【0029】
無人搬送車40の側部突出部材42に位置検出穴43を形成させる一方、移載機本体31に位置検出穴43に係止可能な筒状部材13および位置検出軸15を形成させ、無人搬送車40に移載機本体31を搭載させるときに、位置検出穴43に筒状部材13および位置検出軸15を係止させるようにしたことで、無人搬送車40に対する移載機本体31の位置ずれを防止することができ、その結果、移載機本体31を位置決めするときの位置ずれを防止することができる。また、近接センサを設けたことで、無人搬送車40に対して移載機本体31が所定の位置に位置決めされたかを確認することができる。
【0030】
上記では、係止部として走行路1に設けられた上方に突出した凸部2を用い、被係止部として下方に凹んだ凹部10bを用いて説明したが、係止部と被係止部とが係止可能な形状であれば良く、例えば、係止部を下方に凹んだ穴とし、被係止部を下方に突出した凸部としても、上記係止部および上記被係止部と同様な作用効果を奏する。
【0031】
上記では、4つのアウトリガ10を有する移載機30を用いて説明したが、3つのアウトリガを有し、そのうち少なくとも2つのアウトリガの先端に被係止部を形成した移載機としても良く、移載機30と同様な作用効果を奏する。
【0032】
上記では、第2被係止部に近接センサを設けたが、第2係止部に近接センサを設けるようにしても良く、第2被係止部に近接センサを設けたものと同様な作用効果を奏する。
【産業上の利用可能性】
【0033】
本発明は、移載機に利用可能であり、特に無人搬送車に搭載され、小さい駆動力にて所定の位置に位置決め可能な移載機に利用することが可能である。
【図面の簡単な説明】
【0034】
【図1】本発明の第1の実施例に係る移載機の平面図である。
【図2】本発明の第1の実施例に係る移載機の正面図である。
【図3】図2における囲み線IIIの拡大図である。
【図4】図2における囲み線IVの拡大図である。
【図5】本発明の第1の実施例に係る移載機が有するアウトリガ駆動機構の平面図である。
【図6】本発明の第1の実施例に係る移載機が有するアウトリガ駆動機構の正面図である。
【図7】本発明の第1の実施例に係る移載機が有する位置検出機構の説明図である。
【符号の説明】
【0035】
1 走行路
2 凸部
10 アウトリガ
11 位置検出機構
12 固定具
13 筒状部材
14 ばね
15 位置検出軸
16 蓋部材
17 支持具
20 アウトリガ駆動機構
21 駆動モータ
22 主軸
23 直交ディファレンシャル
24 駆動軸
25 ジャッキ
26 垂直軸
27 スライド部材
28 ボールキャスタ
30 移載機
31 移載機本体
32 フォーク
33 レール
40 無人搬送車
41 荷台
42 側部突出部材
43 位置検出穴
44 スライドプレート
45 ボールキャスタ
【技術分野】
【0001】
本発明は、移載機に関し、特に無人搬送車に搭載され、小さい駆動力にて所定の位置に位置決め可能な移載機に関する。
【背景技術】
【0002】
移載機は、搬送する搬送物品を積載するための昇降可能な積載具を有し、無人搬送車に搭載されている。無人搬送車には四つのキャスタ輪が取り付けられ、そのうち二つには走行路に対して付勢する圧縮コイルばねをキャスタ輪と荷台との間に介在させることで、4つのキャスタ輪を走行路に接地させるようにしている。このような無人搬送車を所定の位置に配置し、前記移載機に前記搬送物品を積載すると、前記搬送物品の自重により前記圧縮コイルばねが収縮して、無人搬送車の配置位置がずれてしまう。このような位置ずれを防止するため無人搬送車にアウトリガを設けており、このアウトリガを走行路に当接させて反力を得ることで、無人搬送車および移載機を所定の位置に配置するようにしている(例えば、特許文献1を参照)。
【0003】
【特許文献1】特開2000−344478号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のような無人搬送車では、アウトリガにより無人搬送車および移載機を所定の位置に位置決めすることができるものの、前記アウトリガは前記移載機の自重を支持するのに加えて、前記無人搬送車の自重をも支持しており、それだけアウトリガを駆動する駆動力が大きい装置が必要になってしまい、その分製造コストが嵩んでしまうという課題があった。
【0005】
そこで、本発明は、上述した問題に鑑み提案されたもので、小さい駆動力にて所定の位置に位置決め可能な移載機を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決する第1の発明に係る移載機は、無人搬送車に搭載される移載機本体を有する移載機であって、前記移載機本体が垂直方向に移動可能な複数のアウトリガを有し、前記アウトリガを走行路に当接させて前記移載機本体を支持させると共に、前記無人搬送車から浮き上がらせるようにしたことを特徴とする。
【0007】
上述した課題を解決する第2の発明に係る移載機は、第1の発明に記載された移載機であって、前記アウトリガのうち少なくとも2つの先端には、前記走行路に配置された係止部に係止可能な被係止部が形成されることを特徴とする。
【0008】
上述した課題を解決する第3の発明に係る移載機は、第1または第2の発明に記載された移載機であって、前記無人搬送車に第2係止部を形成させる一方、前記移載機本体に前記第2係止部に係止可能な第2被係止部を形成させ、前記無人搬送車に前記移載機本体を搭載させるときに、前記無人搬送車の第2係止部を前記移載機本体の第2被係止部に係止させることを特徴とする。
【発明の効果】
【0009】
第1の発明に係る移載機によれば、移載機本体を所定の位置に位置決めさせることができる。アウトリガにより無人搬送車を支持させる必要がなくなるので、その分アウトリガを駆動する駆動力を小さくすることができる。よって、アウトリガを駆動する動力源を従来のものに比べて小さくすることができ、その分製造コストを低減することができる。
【0010】
第2の発明に係る移載機によれば、第1の発明に記載された移載機と同様な作用効果を奏する他、移載機本体を所定の位置に確実に位置決めすることができる。また、係止部を円錐形状とすると共に、被係止部を円錐形状の穴とすることにより、係止部と被係止部とがそれぞれの重なる領域内でずれても、移載機本体の自重が係止部と被係止部との接触面に作用して、係止部の頂点と被係止部の最奥部とが一致させられるので、移載機本体を所定の位置にさらに確実に位置決めすることができる。
【0011】
第3の発明に係る移載機によれば、第1および第2の発明に記載された移載機と同様な作用効果を奏する他、無人搬送車に対する移載機本体の位置ずれを防止することができ、その結果、移載機本体を位置決めするときの位置ずれを防止することができる。また、第2係止部または第2被係止部に近接センサを設けることで、無人搬送車に対して移載機本体が所定の位置に位置決めされたかを確認することができる。
【発明を実施するための最良の形態】
【0012】
以下に、本発明に係る移載機を実施するための最良の形態を実施例に基づき具体的に説明する。
【実施例1】
【0013】
以下に、本発明の第1の実施例に係る移載機について、図を用いて説明する。
図1は、本発明の第1の実施例に係る移載機の平面図であり、図2は、その正面図である。図3は、図2における囲み線IIIの拡大図であり、図4は、図2における囲み線IVの拡大図である。図5は、本発明の第1の実施例に係る移載機が有するアウトリガ駆動機構の平面図であり、図6は、その正面図である。図7は、本発明の第1の実施例に係る移載機が有する位置検出機構の説明図である。
【0014】
本発明の第1の実施例に係る移載機30は、図1、および図2に示すように、無人搬送車40の荷台41に搭載され、所定の位置に配置された搬送物品であるワーク(図示せず)を持ち上げたり、持ち上げて把持したワークを所定の位置に配置したりするものである。無人搬送車40の荷台41におけるアウトリガ(ジャッキ25)の近傍には、摩擦係数が低い板状のスライドプレート44、および全方位に移動自在なボールキャスタ45がそれぞれ取り付けられる。ここで、スライドプレート44は、無人搬送車40の両側部にそれぞれ配置されると共に、対角に配置される。ボールキャスタ45も、無人搬送車40の両側部にそれぞれ配置されると共に、対角に配置される。
【0015】
無人搬送車40が走行する走行路1における所定の位置には、図2および図4に示すように、係止部である、上方に突出した円錐形状の凸部2が設けられる。前記係止部は、所定の位置に少なくとも2箇所(図6を参照)設けられる。
【0016】
移載機30は、図1および図2に示すように、略四角形状の移載機本体31と、移載機本体31の各角部近傍の下部に配置されたアウトリガ10と、アウトリガ10を駆動するアウトリガ駆動機構20とを有する。
【0017】
移載機本体31の上部には、ワークを把持可能であり、移載機本体31から突出可能であり、且つ昇降可能であるフォーク32(把持部材)が配置される。移載機本体31の両側には、アウトリガ駆動機構20がそれぞれ配置される。アウトリガ駆動機構20は、駆動源である駆動モータ21と、駆動モータ21から延在する主軸22に連結された直交ディファレンシャル23と、直交ディファレンシャル23に連結された駆動軸24と、駆動軸24に連結されたジャッキ25とを有する。直交ディファレンシャル23により主軸22の回転が、駆動軸24に伝わって当該駆動軸24が回転する。
【0018】
移載機本体31の下部31aには、図6に示すように、垂直下方に延在するガイド部材32が設けられる。ガイド部材32には、垂直下方に延在するレール33が取り付けられる。
【0019】
ジャッキ25には、移載機本体31を貫通して垂直下方に延在し、回転自在な垂直軸26が連結される。垂直軸26には、アウトリガ10に形成された軸穴10aが係止される。すなわち、軸穴10aにはねじ山(図示せず)が形成されており、この軸穴10aに垂直軸26に形成されたねじ山(図示せず)が螺合される。アウトリガ10の一側部には、ガイド部材32のレール33上を移動可能なスライド部材27が固定される。よって、垂直軸26が回転することで、アウトリガ10がレール33に沿って垂直方向に移動する。
【0020】
移載機本体31の一側部側に配置される2つのアウトリガ10の先端には、図2、図4および図6に示すように、走行路1上に配置された係止部2に係止可能な被係止部である、下方に凹んだ穴状の凹部10bが形成される。すなわち、凹部10bは円錐形状に形成されており、凸部2に当接される。よって、係止部および被係止部を上述したような形状にすることにより、ゴミ等が入り込まないようになり、移載機本体31の位置決めの誤差を少なくすることができる。
【0021】
移載機本体31の他側部側に配置される2つのアウトリガ10の先端には、図2および図3に示すように、走行路1上を全方位に走行可能なボールキャスタ28が取り付けられる。
【0022】
図1に示すように、2つのアウトリガ10に位置検出機構11がそれぞれ取り付けられており、ここでは、移載機本体31の両側に配置され、且つ対角に配置されるアウトリガ10にそれぞれ取り付けられる。位置検出機構11は、図7に示すように、アウトリガ10に固定具12を介して固定され、上下方向に延在するように配置された筒状部材13と、筒状部材13内に配置されると共に、先端15aが上方に向けて配置され、ばね14により上方に向けて付勢された位置検出軸15を有する。なお、位置検出軸15には、近接スイッチ(図示せず)が設けられており、この近接スイッチは無人搬送車40に対して移載機30が所定の位置に配置されたことを検出する。
【0023】
筒状部材13の先端には、下方に向けて外側に延在する傾斜面13aが形成される。筒状部材13の後端は、蓋部材16により閉塞されており、ばね14の下部が蓋部材16に係止される。この蓋部材16は、支持具17によりアウトリガ10に固定される。
【0024】
無人搬送車40における位置検出機構11の近傍には、図1および図7に示すように、側方に延在する側部突出部材42が固定される。この側部突出部材42には、筒状部材13の傾斜面13aに当接する当接面43aを有し、位置検出軸15が突出可能な位置検出穴43が形成される。ただし、位置検出穴43の幅は、係止部である凸部2の幅と略同じ大きさであり、無人搬送車40に対する移載機30の位置ずれを許容できるように形成される。
【0025】
無人搬送車40に移載機30が搭載されるときには、筒状部材13の傾斜面13aが側部突出部材42の位置検出穴43の当接面43aに当接して係止され、位置検出軸15の先端15aが位置検出穴43から突出して配置される。駆動モータ21を駆動すると、最初はアウトリガ10が下方に向けて延びる。それに伴い、筒状部材13および位置検出軸15が下方に移動し、側部突出部材42の位置検出穴43から外に出る。さらに、アウトリガ10を延ばし、走行路1に当接すると、移載機本体31が上方に移動され、無人搬送車40から浮き上がる。アウトリガ10を走行路1に当接させるとき、アウトリガの凹部10bと走行路の凸部2とがその幅以内でずれていても、移載機30の自重が凹部10bを介して凸部2に作用して、ボールキャスタ28により移載機30が横方向に移動し、アウトリガ10の凹部10bにおける最奥部2cと凸部2の先端部2aとが一致するようになり、移載機30が所定の位置に配置されて、位置決めされる。この状態にて、ワークの移載が行われる。
【0026】
続いて、アウトリガ10を縮めていくと、移載機本体31が下方に移動していく。さらにアウトリガ10を縮めていくと、位置検出機構11の筒状部材13および位置検出軸15が側部突出部材42の位置検出穴43内に配置される。さらにアウトリガ10を縮めていくと、移載機本体30が無人搬送車40の荷台41に当接して、搭載される。このとき、筒状部材13の傾斜面13aが位置検出穴43の当接面43aに当接すると共に、位置検出軸15が位置検出穴43の当接面43aに当接する。さらにアウトリガ10を縮めていき、移載機30が無人搬送車40に完全に搭載されると、位置検出穴43の当接面43aを介して、筒状部材13の傾斜面13a、および位置検出軸15の先端15aに作用し、移載機本体31の自重により、無人搬送車40に対して所定の位置に移載機30が配置される。すなわち、位置検出穴43が第2係止部に相当し、筒状部材13および位置検出軸15が第2被係止部に相当する。
【0027】
したがって、本発明の第1の実施例に係る移載機30によれば、移載機本体31を所定の位置に位置決めさせることができる。アウトリガ10により無人搬送車40を支持させる必要がなくなるので、その分アウトリガ10を駆動する駆動力を小さくすることができる。よって、アウトリガ10を駆動する動力源を従来のものに比べて小さくすることができ、その分製造コストを低減することができる。
【0028】
また、2つのアウトリガ10の先端には、走行路1に配置された係止部2に係止可能な被係止部10bを形成したことにより、移載機本体を所定の位置に確実に位置決めすることができる。係止部2を円錐形状とすると共に、被係止部10bを円錐形状の穴とすることにより、係止部2と被係止部10bとが重なる領域内でずれても、移載機本体31の自重が係止部2と被係止部10bとの接触面に作用して、係止部2の頂点2aと被係止部10bの最奥部10cとが一致させられるので、移載機本体31を所定の位置にさらに確実に位置決めすることができる。
【0029】
無人搬送車40の側部突出部材42に位置検出穴43を形成させる一方、移載機本体31に位置検出穴43に係止可能な筒状部材13および位置検出軸15を形成させ、無人搬送車40に移載機本体31を搭載させるときに、位置検出穴43に筒状部材13および位置検出軸15を係止させるようにしたことで、無人搬送車40に対する移載機本体31の位置ずれを防止することができ、その結果、移載機本体31を位置決めするときの位置ずれを防止することができる。また、近接センサを設けたことで、無人搬送車40に対して移載機本体31が所定の位置に位置決めされたかを確認することができる。
【0030】
上記では、係止部として走行路1に設けられた上方に突出した凸部2を用い、被係止部として下方に凹んだ凹部10bを用いて説明したが、係止部と被係止部とが係止可能な形状であれば良く、例えば、係止部を下方に凹んだ穴とし、被係止部を下方に突出した凸部としても、上記係止部および上記被係止部と同様な作用効果を奏する。
【0031】
上記では、4つのアウトリガ10を有する移載機30を用いて説明したが、3つのアウトリガを有し、そのうち少なくとも2つのアウトリガの先端に被係止部を形成した移載機としても良く、移載機30と同様な作用効果を奏する。
【0032】
上記では、第2被係止部に近接センサを設けたが、第2係止部に近接センサを設けるようにしても良く、第2被係止部に近接センサを設けたものと同様な作用効果を奏する。
【産業上の利用可能性】
【0033】
本発明は、移載機に利用可能であり、特に無人搬送車に搭載され、小さい駆動力にて所定の位置に位置決め可能な移載機に利用することが可能である。
【図面の簡単な説明】
【0034】
【図1】本発明の第1の実施例に係る移載機の平面図である。
【図2】本発明の第1の実施例に係る移載機の正面図である。
【図3】図2における囲み線IIIの拡大図である。
【図4】図2における囲み線IVの拡大図である。
【図5】本発明の第1の実施例に係る移載機が有するアウトリガ駆動機構の平面図である。
【図6】本発明の第1の実施例に係る移載機が有するアウトリガ駆動機構の正面図である。
【図7】本発明の第1の実施例に係る移載機が有する位置検出機構の説明図である。
【符号の説明】
【0035】
1 走行路
2 凸部
10 アウトリガ
11 位置検出機構
12 固定具
13 筒状部材
14 ばね
15 位置検出軸
16 蓋部材
17 支持具
20 アウトリガ駆動機構
21 駆動モータ
22 主軸
23 直交ディファレンシャル
24 駆動軸
25 ジャッキ
26 垂直軸
27 スライド部材
28 ボールキャスタ
30 移載機
31 移載機本体
32 フォーク
33 レール
40 無人搬送車
41 荷台
42 側部突出部材
43 位置検出穴
44 スライドプレート
45 ボールキャスタ
【特許請求の範囲】
【請求項1】
無人搬送車に搭載される移載機本体を有する移載機であって、
前記移載機本体が垂直方向に移動可能な複数のアウトリガを有し、
前記アウトリガを走行路に当接させて前記移載機本体を支持させると共に、前記無人搬送車から浮き上がらせるようにした
ことを特徴とする移載機。
【請求項2】
請求項1に記載された移載機であって、
前記アウトリガのうち少なくとも2つの先端には、前記走行路に配置された係止部に係止可能な被係止部が形成される
ことを特徴とする移載機。
【請求項3】
請求項1または請求項2に記載された移載機であって、
前記無人搬送車に第2係止部を形成させる一方、前記移載機本体に前記第2係止部に係止可能な第2被係止部を形成させ、
前記無人搬送車に前記移載機本体を搭載させるときに、前記無人搬送車の第2係止部に前記移載機本体の第2被係止部を係止させる
ことを特徴とする移載機。
【請求項1】
無人搬送車に搭載される移載機本体を有する移載機であって、
前記移載機本体が垂直方向に移動可能な複数のアウトリガを有し、
前記アウトリガを走行路に当接させて前記移載機本体を支持させると共に、前記無人搬送車から浮き上がらせるようにした
ことを特徴とする移載機。
【請求項2】
請求項1に記載された移載機であって、
前記アウトリガのうち少なくとも2つの先端には、前記走行路に配置された係止部に係止可能な被係止部が形成される
ことを特徴とする移載機。
【請求項3】
請求項1または請求項2に記載された移載機であって、
前記無人搬送車に第2係止部を形成させる一方、前記移載機本体に前記第2係止部に係止可能な第2被係止部を形成させ、
前記無人搬送車に前記移載機本体を搭載させるときに、前記無人搬送車の第2係止部に前記移載機本体の第2被係止部を係止させる
ことを特徴とする移載機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−210729(P2007−210729A)
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願番号】特願2006−31300(P2006−31300)
【出願日】平成18年2月8日(2006.2.8)
【出願人】(000006105)株式会社明電舎 (1,739)
【Fターム(参考)】
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願日】平成18年2月8日(2006.2.8)
【出願人】(000006105)株式会社明電舎 (1,739)
【Fターム(参考)】
[ Back to top ]