
移載装置
【課題】低コストかつ省スペースな構成の移載装置を提供する。
【解決手段】作業者によるワークWの移載を補助する移載装置100であって、ワークWを先端部33で保持するアーム30と、アーム30の基端部31を支持する支柱20と、アーム30の中途部32を支持するガススプリング40と、アーム30の中途部32をガススプリング40で支持する上端側支持部92を移動させる移動装置50と、を具備し、移動装置50は、ガススプリング40の長さが変わらないように、上端側支持部92を移動させる。
【解決手段】作業者によるワークWの移載を補助する移載装置100であって、ワークWを先端部33で保持するアーム30と、アーム30の基端部31を支持する支柱20と、アーム30の中途部32を支持するガススプリング40と、アーム30の中途部32をガススプリング40で支持する上端側支持部92を移動させる移動装置50と、を具備し、移動装置50は、ガススプリング40の長さが変わらないように、上端側支持部92を移動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、作業者による重量物(ワーク)の移載を補助する移載装置の技術に関する。
【背景技術】
【0002】
移載装置は、重量物(ワーク)を地点間で移載するときに用いられる装置である。移載装置には、作業者がワークを移載するときに、ワークを保持し、作業者によるワークの移載を補助するものがある。このような移載装置では、ワークの重量をバランスさせた状態(ワーク重量バランス状態)で保持し、移載装置により保持されたワークを作業者が移動させる、あるいは、移載装置により保持されたワークを作業者が目的の位置へ載置する等の移載作業が行われる。
【0003】
「ワーク重量バランス状態」とは、ワークにワーク重量と均衡する力を作用させている状態である。「ワーク重量バランス状態」は、例えば、上方からホイストによってワークを吊るす、あるいは、下方からエアシリンダによってワークを支持する構成等によって維持される。
【0004】
このような「ワーク重量バランス状態」を維持する構成では、ワーク重量を保持するために、サーボモータ、あるいは、コンプレッサにより駆動されるエアシリンダ等の駆動装置を用いており、これらの駆動装置を制御する制御盤が必要である。そのため、移載装置が必然的に高コスト化かつ大型化し、駆動装置の安全性に関する配慮も必要となる。そこで、移載装置の技術分野では、移載装置を低コストかつ省スペースな構成とすることが課題となっている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−301695号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の解決しようとする課題は、低コストかつ省スペースな構成の移載装置を提供することである。
【課題を解決するための手段】
【0007】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0008】
即ち、請求項1においては、作業者によるワークの移載を補助する移載装置であって、前記ワークを先端側で保持するアームと、前記アームの基端側を支持する支柱と、前記アームの中途部を支持する弾性部材と、前記弾性部材による前記アームの中途部の支持位置を移動させる移動装置と、を具備するものである。
【0009】
請求項2においては、請求項1記載の移載装置であって、前記移動装置は、前記弾性部材の長さが変わらないように、前記弾性部材による前記アームの中途部の支持部を移動させるものである。
【0010】
請求項3においては、請求項2記載の移載装置であって、前記移動装置は、前記弾性部材による前記アームの中途部の支持部を、前記アームの中途部にて円弧形状の長孔に形成される係合孔に係合させて移動させるものである。
【0011】
請求項4においては、請求項3記載の移載装置であって、前記移動装置は、前記弾性部材による前記アームの中途部の支持部の移動を、前記係合孔の適宜位置にて一時停止させるセルフロック機構を具備するものである。
【発明の効果】
【0012】
本発明の移載装置によれば、移載装置を低コストかつ省スペースな構成とすることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態である移載装置の構成を示した構成図。
【図2】同じく移載装置の作用を示した模式図。
【図3】同じく移載装置による移載作業を示した模式図。
【図4】同じく移載装置による移載作業を示した模式図。
【発明を実施するための形態】
【0014】
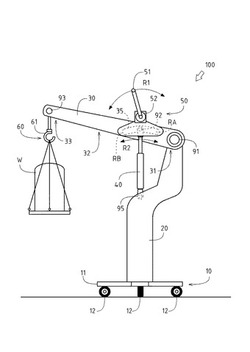
図1を用いて、移載装置100の構成について説明する。
移載装置100は、本発明の移載装置の実施形態である。移載装置100は、作業者が重量物であるワークWを移載するときに、ワークWを保持し、作業者によるワークWの移載を補助する装置である。移載装置100は、走行部10と、支柱20と、アーム30と、弾性体としてのガススプリング40と、移動機構50と、吊り下げ部60と、を具備している。
【0015】
走行部10は、移載装置100を移動可能に支持するものである。ただし、走行部10は、駆動装置によって移動する構成ではない。走行部10は、ベース11と、複数(本実施形態では4つ)の車輪12・12・・と、を具備している。
【0016】
支柱20は、アーム30の後述する基端部31を支持するものである。支柱20は、基端側支持部91によって、アーム30の基端部31を回動支持している。支柱20は、下端側支持部95によって、ガススプリング40の下端側を回動支持している。
【0017】
アーム30は、移載装置100にて挺子の役割を担うものである。アーム30は、基端部31と、中途部32と、先端部33と、から構成されている。アーム30の基端部31は、基端側支持部91によって、挺子の支点として支柱20に回動支持されている。アーム30の中途部32は、上端側支持部92によって、挺子の力点としてガススプリング40に回動支持されている。アーム30の先端部33は、先端側支持部93によって、挺子の作用点として吊り下げ部60を支持している。
【0018】
アーム30の中途部32には、係合孔35が形成されている。係合孔35は、アーム30の中途部32の側面にて円弧形状の長孔として形成されている。
【0019】
ガススプリング40によるアーム30の中途部32の支持部となる上端側支持部92は、係合孔35に係合して、係合孔35に沿って円弧を描くように移動可能に構成されている(図1中の矢印R2)。より具体的には、上端側支持部92は、係合孔35に係合して、係合孔35における、アーム30の基端部31側端の位置RAから、アーム30の先端部33側端の位置RBまでの範囲で、円弧を描くように移動可能に構成されている。
【0020】
ガススプリング40は、密閉されたシリンダ内に高圧ガスが封入されており、高圧ガスの反力を弾性力とするものである。ガススプリング40は、上端側支持部92によって、アーム30の中途部32を支持している。ガススプリング40は、下端側支持部95によって、支柱20に回動支持されている。
【0021】
ガススプリング40は、上端側支持部92をアーム30の基端部31側の位置RAに位置させてアーム30を支持する状態と、上端側支持部92をアーム30の先端部33側の位置RBに位置させてアーム30を支持する状態とを切り換え可能に構成されている。また、ガススプリング40は、上端側支持部92を位置RAと位置RBとの間の任意の位置に位置させた状態でアーム30を支持することも可能である。このように、ガススプリング40は、アーム30の中途部32の支持位置(上端側支持部92の位置)を移動可能に構成されている。
【0022】
移動機構50は、ガススプリング40によるアーム30の中途部32の支持位置を移動させるための機構であって、作業者が手動で上端側支持部92の位置を回動操作できるように構成されたものである。移動機構50は、アーム30の中途部32に設けられている。移動機構50は、ハンドル51と、変換機構52と、を具備している。ハンドル51は、作業者によって回動されるものである。変換機構52は、ハンドル51の回動(図1中の矢印R1)を上端側支持部92の係合孔35に沿う方向への移動(図1中の矢印R2)に変換するものである。変換機構52は、セルフロック機構を具備している。
【0023】
セルフロック機構は、外部からの操作力によって入力軸(ハンドル51)は自由に回動できるものの、出力軸(上端側支持部92)は自由に移動できないようにする機構である。言い換えると、上端側支持部92は、移動機構50に入力されたハンドル51の回動力によってのみ移動し、上端側支持部92に対して外部からかかる力であるアーム30の荷重等によって移動することはない。また、セルフロック機構によれば、ハンドル51を固定することによって、上端側支持部92を係合孔35の適宜位置にて一時的に停止することができる。
【0024】
吊り下げ部60は、重量物であるワークWを吊り下げるものである。吊り下げ部60は、アーム30の先端部33に配置される先端側支持部93によって回動支持されている。吊り下げ部60は、フック61を具備している。フック61は、ワークWを引っ掛けて吊り下げるものである。
【0025】
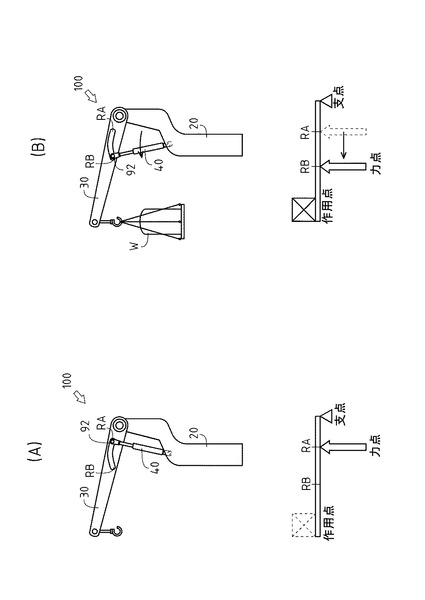
図2を用いて、移載装置100の作用について説明する。
図2(A)は、移載装置100がワークWを保持していない状態を示し、図2(B)は、移載装置100がワークWを保持している状態を示している。また、図2(A)および図2(B)の下方には、アーム30を挺子として表現した模式図を示している。なお、図2では、説明を分かり易くするため、走行部10及び移動機構50を省略して示している。
【0026】
図2(A)に示すように、移載装置100がワークWを保持していない状態では、上端側支持部92が係合孔35の位置RAに位置した姿勢で、ガススプリング40によるアーム30の支持を行っている。ここで、アーム30を挺子としてみたときに、基端側支持部91が支点となり、上端側支持部92が力点となり、先端側支持部93が作用点となる。移載装置100がワークWを保持していない状態では、作用点には荷重が作用しないため、吊り下げ部60及びアーム30の荷重と釣り合うように、力点が位置RBより支点に近い位置RAに作用するように、ガススプリング40によるアーム30の支持を行っている。
【0027】
移載装置100がワークWを保持していない状態では、上端側支持部92が位置RAに位置している。このとき、吊り下げ部60およびアーム30の重量と、ガススプリング40の弾性力による反力が釣り合うことによって、移載装置100の重量がバランスされている状態である「装置バランス状態」が維持されている。
【0028】
図2(B)に示すように、移載装置100がワークWを保持している状態では、上端側支持部92が係合孔35の位置RBに位置した姿勢で、ガススプリング40によるアーム30の支持を行っている。移載装置100がワークWを保持している状態では、作用点には、ワークWの荷重が作用するため、吊り下げ部60及びアーム30の荷重並びにワークWの荷重と釣り合うように、力点が位置RAよりも支点から遠い位置RBに作用するように、ガススプリング40によるアーム30の支持を行っている。
【0029】
移載装置100がワークWを保持している状態では、上端側支持部92が位置RBに位置している。このとき、吊り下げ部60、アーム30及びワークWの重量と、ガススプリング40の弾性力による反力が釣り合うことによって、ワークWの重量がバランスされている状態である「ワーク重量バランス状態」が維持されている。
【0030】
なお、上述したように、セルフロック機構によって、上端側支持部92は、係合孔35の任意の位置(位置RAと位置RBの間)にて一時的に停止できる。そのため、上端側支持部92の停止位置を調整して、ワークWの重量に対応した「ワーク重量バランス状態」が維持される。例えば、ワークWの重量が重い場合には上端側支持部92を係合孔35の位置RB側の適宜位置に停止させ、ワークWの重量が軽い場合には上端側支持部92を係合孔35の位置RA側の適宜位置に停止させることで、「ワーク重量バランス状態」を維持することができる。
【0031】
ここで、特記すべき事項として、位置RAまたは位置RBであっても、ガススプリング40の長さは変化していない。言い換えれば、移載装置100が「装置バランス状態」あるいは「ワーク重量バランス状態」であっても、ガススプリング40の反力は変化していない。
【0032】
また、位置RAから位置RBに移動するときには、ガススプリング40の長さは変化していない。言い換えれば、移載装置100が「装置バランス状態」から「ワーク重量バランス状態」まで移動するときには、ガススプリング40の反力は変化していない。なお、「ワーク重量バランス状態」から「装置バランス状態」まで移動するとき、すなわち位置RBから位置RAに移動するときであっても同様である。
【0033】
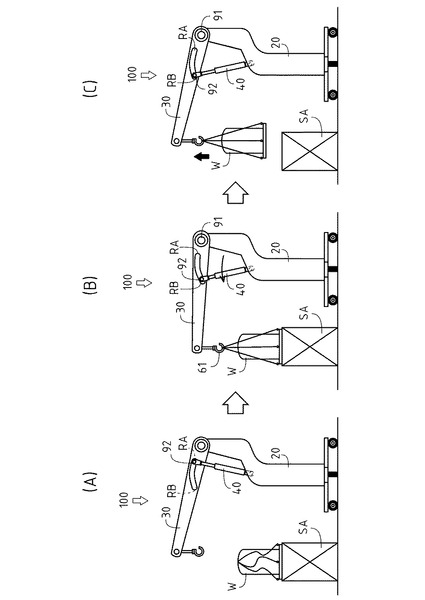
図3および図4を用いて、移載装置100による移載作業について説明する。
図3(A)から図4(C)までは、移載作業の一連の流れを順に模式的に示している。なお、図3および図4では、説明を分かり易くするため、移動機構50を省略して示している。
【0034】
本実施形態の移載装置100による移載作業では、作業者が重量物であるワークWを地点SAから地点SBまで移載する移載するときに、移載装置100によってワークWを保持し、作業者(図示略)によるワークWの移載を補助するものとする。また、地点SAと地点SBとの高さは、略同一とされている。
【0035】
図3(A)に示すように、作業者は、移載装置100を地点SAの近くまで移動させる。このとき、移載装置100では、ワークWを保持しない状態であって、上端側支持部92が位置RAに位置し、「装置バランス状態」が維持されている。
【0036】
図3(B)に示すように、作業者は、移載装置100のフック61にワークWを引っ掛ける。このとき、移載装置100は「装置バランス状態」であり、「装置バランス状態」が維持される範囲では、アーム30を人力にて基端側支持部91を中心にして回動することができるため、作業者によりフック61の高さ位置を調整することができる。そのため、作業者は、容易にワークWを引っ掛けることができる。
【0037】
作業者は、フック61にワークWを引っ掛けるのと略同時に、ハンドル51を回動して、上端側支持部92を位置RAから位置RBに移動させる。言い換えれば、作業者は、移載装置100を「装置バランス状態」から「ワーク重量バランス状態」に移行させる。「装置バランス状態」から「ワーク重量バランス状態」に移行するとき、ガススプリング40の長さは変化しないため、ガススプリング40の弾性力は変化しない。つまり、人力で上端側支持部92を位置RAから位置RBに移動させることができる。そのため、作業者は、容易に「装置バランス状態」から「ワーク重量バランス状態」に移行させることができる。
【0038】
図3(C)に示すように、作業者は、移載装置100によってワークWを持ち上げる。このとき、移載装置100は「ワーク重量バランス状態」であり、「ワーク重量バランス状態」が維持される範囲では、アーム30を人力にて基端側支持部91を中心にして回動することができるため、作業者によりフック61の高さ位置を調整することができる。そのため、作業者は、移載装置100によって容易にワークWを持ち上げることができる。
【0039】
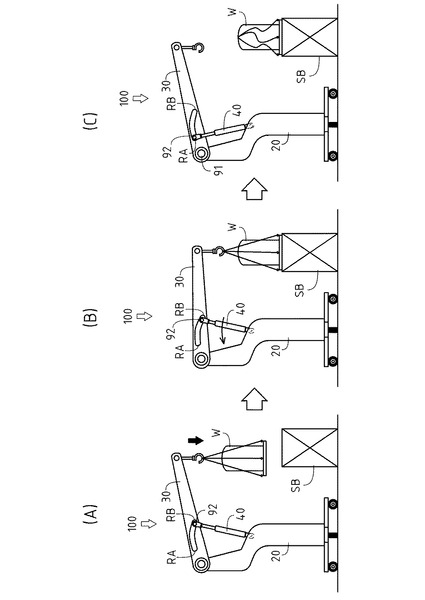
図4(A)に示すように、作業者は、移載装置100を地点SBの近くまで移動させる。このとき、移載装置100は、移載装置100が「ワーク重量バランス状態」であるため、人力にてワークWの重量を支持することなく移載装置100を走行させ、方向転換させることができる。そのため、作業者は、容易に移載装置100を移動させることができる。
【0040】
図4(B)に示すように、作業者は、ワークWを地点SBに載置する。このとき、移載装置100は「ワーク重量バランス状態」であり、「ワーク重量バランス状態」が維持される範囲では、アーム30を人力にて基端側支持部91を中心にして回動することができるため、作業者によりフック61の高さ位置を調整することができる。そのため、作業者は、容易にワークWを地点SBに載置することができる。
【0041】
作業者は、ワークWを地点SBに載置するのと略同時に、ハンドル51を回動して、上端側支持部92を位置RBから位置RAに移動させる。言い換えれば、作業者は、移載装置100を「ワーク重量バランス状態」から「装置バランス状態」に移行させる。「ワーク重量バランス状態」から「装置バランス状態」に移行させるとき、ガススプリング40の長さは変化していないため、ガススプリング40の弾性力は変化しない。つまり、人力で上端側支持部92を位置RBから位置RAに移動させることができる。そのため、作業者は容易に「ワーク重量バランス状態」から「装置バランス状態」に移行させることができる。
【0042】
図4(C)に示すように、作業者は、移載装置100のフック61からワークWを取り外す。このとき、移載装置100が「装置バランス状態」であり、「装置バランス状態」が維持される範囲では、アーム30を人力にて基端側支持部91を中心にして回動することができるため、作業者によりフック61の位置を調整することができる。そのため、作業者は、容易にワークWを取り外すことができる。
【0043】
移載装置100の効果について説明する。
移載装置100によれば、移載装置100を低コストかつ省スペースな構成とすることができる。すなわち、移載装置100では、ガススプリング40および手動により操作される移動装置50を用いることによって駆動装置を不要とし、駆動装置を制御する制御盤も不要としている。そのため、移載装置100のコスト及びスペースが必然的に低減される。
【0044】
移載装置100によれば、移載装置100の保全性を向上できる。すなわち、移載装置100では、ガススプリング40および移動装置50を用いることによって駆動装置を不要とし、駆動装置を制御する制御盤も不要としている。そのため、駆動装置および制御盤の安全性に関する配慮も不要となる。つまり、移載装置100の保全性が向上される。
【0045】
移載装置100によれば、工場内での設置コスト及び設置工数を削減できる。従来、移載装置は、上方からホイストによってワークWを吊るす、あるいは、下方からエアシリンダによってワークWを支持する構成等であるため、工場内で設置するには、設置コストおよび設置工数が嵩んでいた。しかし、移載装置100によれば、人力によって容易に移動できるため、工場内での設置コスト及び設置工数が必然的に削減される。
【0046】
移載装置100によれば、移動時の操作性を向上できる。すなわち、移載装置100によれば、人力によって容易に移動できる。そのため、作業者は、移載装置100によってワークWを保持し、工場内を自由に移動できる。つまり、移載装置100の移動時の操作性が向上される。
【0047】
移載装置100によれば、載置時の操作性を向上できる。従来、移載装置は、上方からホイストによってワークを吊るす、あるいは、下方からエアシリンダによってワークを支持する構成等であるため、例えば移載装置に保持されたワークWを移載先に載置するときには載置位置等の微調整が難しく、操作性が悪かった。しかし、移載装置100によれば、「ワーク重量バランス状態」が維持される範囲では人力にて基端側支持部91を回動することができ、人力によって容易にワークWの位置を調整できる。そのため、移載装置100の載置時の操作性が向上される。
【0048】
移載装置100によれば、汎用性を向上できる。すなわち、移載装置100によれば、上端側支持部92の停止位置を調整すれば、ワークWの重量に対応した「ワーク重量バランス状態」を維持することができる。そのため、移載装置100は、様々なワークWを保持することができる。つまり、移載装置100の汎用性が向上される。
【0049】
移載装置100によれば、ガススプリング40の長さを変えずに上端側支持部92を位置RAから位置RBに移動させるため、人力によって容易に「装置バランス状態」から「ワーク重量バランス状態」への移行ができる。
【0050】
移載装置100によれば、円弧形状の長孔に形成される係合孔35に上端側支持部92を係合させることによって、簡易な構造によって、ガススプリング40の長さを変えずに上端側支持部92を位置RAから位置RBに移動させることができる。
【0051】
その他の実施形態について説明する。
本実施形態では、弾性体をガススプリング40とする構成としたが、これに限定されない。例えば、弾性体を弾性バネにケースを被装した構成としても良い。
【0052】
本実施形態では、変換機構52について、ハンドル51の回動を上端側支持部92の移動に変換する以外は特に限定していない。しかし、ハンドル51の回動を減速して上端側支持部92の移動に変換する減速機構を備える構成としても良い。
【符号の説明】
【0053】
10 走行部
20 支柱
30 アーム
31 基端側
32 中途部
33 先端側
35 係合孔
40 ガススプリング
50 移動装置
51 ハンドル
60 吊り下げ部
61 フック
91 基端側支持部
92 上端側支持部(アームの中途部の支持部)
93 先端側支持部
100 移載装置
【技術分野】
【0001】
本発明は、作業者による重量物(ワーク)の移載を補助する移載装置の技術に関する。
【背景技術】
【0002】
移載装置は、重量物(ワーク)を地点間で移載するときに用いられる装置である。移載装置には、作業者がワークを移載するときに、ワークを保持し、作業者によるワークの移載を補助するものがある。このような移載装置では、ワークの重量をバランスさせた状態(ワーク重量バランス状態)で保持し、移載装置により保持されたワークを作業者が移動させる、あるいは、移載装置により保持されたワークを作業者が目的の位置へ載置する等の移載作業が行われる。
【0003】
「ワーク重量バランス状態」とは、ワークにワーク重量と均衡する力を作用させている状態である。「ワーク重量バランス状態」は、例えば、上方からホイストによってワークを吊るす、あるいは、下方からエアシリンダによってワークを支持する構成等によって維持される。
【0004】
このような「ワーク重量バランス状態」を維持する構成では、ワーク重量を保持するために、サーボモータ、あるいは、コンプレッサにより駆動されるエアシリンダ等の駆動装置を用いており、これらの駆動装置を制御する制御盤が必要である。そのため、移載装置が必然的に高コスト化かつ大型化し、駆動装置の安全性に関する配慮も必要となる。そこで、移載装置の技術分野では、移載装置を低コストかつ省スペースな構成とすることが課題となっている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−301695号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の解決しようとする課題は、低コストかつ省スペースな構成の移載装置を提供することである。
【課題を解決するための手段】
【0007】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0008】
即ち、請求項1においては、作業者によるワークの移載を補助する移載装置であって、前記ワークを先端側で保持するアームと、前記アームの基端側を支持する支柱と、前記アームの中途部を支持する弾性部材と、前記弾性部材による前記アームの中途部の支持位置を移動させる移動装置と、を具備するものである。
【0009】
請求項2においては、請求項1記載の移載装置であって、前記移動装置は、前記弾性部材の長さが変わらないように、前記弾性部材による前記アームの中途部の支持部を移動させるものである。
【0010】
請求項3においては、請求項2記載の移載装置であって、前記移動装置は、前記弾性部材による前記アームの中途部の支持部を、前記アームの中途部にて円弧形状の長孔に形成される係合孔に係合させて移動させるものである。
【0011】
請求項4においては、請求項3記載の移載装置であって、前記移動装置は、前記弾性部材による前記アームの中途部の支持部の移動を、前記係合孔の適宜位置にて一時停止させるセルフロック機構を具備するものである。
【発明の効果】
【0012】
本発明の移載装置によれば、移載装置を低コストかつ省スペースな構成とすることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態である移載装置の構成を示した構成図。
【図2】同じく移載装置の作用を示した模式図。
【図3】同じく移載装置による移載作業を示した模式図。
【図4】同じく移載装置による移載作業を示した模式図。
【発明を実施するための形態】
【0014】
図1を用いて、移載装置100の構成について説明する。
移載装置100は、本発明の移載装置の実施形態である。移載装置100は、作業者が重量物であるワークWを移載するときに、ワークWを保持し、作業者によるワークWの移載を補助する装置である。移載装置100は、走行部10と、支柱20と、アーム30と、弾性体としてのガススプリング40と、移動機構50と、吊り下げ部60と、を具備している。
【0015】
走行部10は、移載装置100を移動可能に支持するものである。ただし、走行部10は、駆動装置によって移動する構成ではない。走行部10は、ベース11と、複数(本実施形態では4つ)の車輪12・12・・と、を具備している。
【0016】
支柱20は、アーム30の後述する基端部31を支持するものである。支柱20は、基端側支持部91によって、アーム30の基端部31を回動支持している。支柱20は、下端側支持部95によって、ガススプリング40の下端側を回動支持している。
【0017】
アーム30は、移載装置100にて挺子の役割を担うものである。アーム30は、基端部31と、中途部32と、先端部33と、から構成されている。アーム30の基端部31は、基端側支持部91によって、挺子の支点として支柱20に回動支持されている。アーム30の中途部32は、上端側支持部92によって、挺子の力点としてガススプリング40に回動支持されている。アーム30の先端部33は、先端側支持部93によって、挺子の作用点として吊り下げ部60を支持している。
【0018】
アーム30の中途部32には、係合孔35が形成されている。係合孔35は、アーム30の中途部32の側面にて円弧形状の長孔として形成されている。
【0019】
ガススプリング40によるアーム30の中途部32の支持部となる上端側支持部92は、係合孔35に係合して、係合孔35に沿って円弧を描くように移動可能に構成されている(図1中の矢印R2)。より具体的には、上端側支持部92は、係合孔35に係合して、係合孔35における、アーム30の基端部31側端の位置RAから、アーム30の先端部33側端の位置RBまでの範囲で、円弧を描くように移動可能に構成されている。
【0020】
ガススプリング40は、密閉されたシリンダ内に高圧ガスが封入されており、高圧ガスの反力を弾性力とするものである。ガススプリング40は、上端側支持部92によって、アーム30の中途部32を支持している。ガススプリング40は、下端側支持部95によって、支柱20に回動支持されている。
【0021】
ガススプリング40は、上端側支持部92をアーム30の基端部31側の位置RAに位置させてアーム30を支持する状態と、上端側支持部92をアーム30の先端部33側の位置RBに位置させてアーム30を支持する状態とを切り換え可能に構成されている。また、ガススプリング40は、上端側支持部92を位置RAと位置RBとの間の任意の位置に位置させた状態でアーム30を支持することも可能である。このように、ガススプリング40は、アーム30の中途部32の支持位置(上端側支持部92の位置)を移動可能に構成されている。
【0022】
移動機構50は、ガススプリング40によるアーム30の中途部32の支持位置を移動させるための機構であって、作業者が手動で上端側支持部92の位置を回動操作できるように構成されたものである。移動機構50は、アーム30の中途部32に設けられている。移動機構50は、ハンドル51と、変換機構52と、を具備している。ハンドル51は、作業者によって回動されるものである。変換機構52は、ハンドル51の回動(図1中の矢印R1)を上端側支持部92の係合孔35に沿う方向への移動(図1中の矢印R2)に変換するものである。変換機構52は、セルフロック機構を具備している。
【0023】
セルフロック機構は、外部からの操作力によって入力軸(ハンドル51)は自由に回動できるものの、出力軸(上端側支持部92)は自由に移動できないようにする機構である。言い換えると、上端側支持部92は、移動機構50に入力されたハンドル51の回動力によってのみ移動し、上端側支持部92に対して外部からかかる力であるアーム30の荷重等によって移動することはない。また、セルフロック機構によれば、ハンドル51を固定することによって、上端側支持部92を係合孔35の適宜位置にて一時的に停止することができる。
【0024】
吊り下げ部60は、重量物であるワークWを吊り下げるものである。吊り下げ部60は、アーム30の先端部33に配置される先端側支持部93によって回動支持されている。吊り下げ部60は、フック61を具備している。フック61は、ワークWを引っ掛けて吊り下げるものである。
【0025】
図2を用いて、移載装置100の作用について説明する。
図2(A)は、移載装置100がワークWを保持していない状態を示し、図2(B)は、移載装置100がワークWを保持している状態を示している。また、図2(A)および図2(B)の下方には、アーム30を挺子として表現した模式図を示している。なお、図2では、説明を分かり易くするため、走行部10及び移動機構50を省略して示している。
【0026】
図2(A)に示すように、移載装置100がワークWを保持していない状態では、上端側支持部92が係合孔35の位置RAに位置した姿勢で、ガススプリング40によるアーム30の支持を行っている。ここで、アーム30を挺子としてみたときに、基端側支持部91が支点となり、上端側支持部92が力点となり、先端側支持部93が作用点となる。移載装置100がワークWを保持していない状態では、作用点には荷重が作用しないため、吊り下げ部60及びアーム30の荷重と釣り合うように、力点が位置RBより支点に近い位置RAに作用するように、ガススプリング40によるアーム30の支持を行っている。
【0027】
移載装置100がワークWを保持していない状態では、上端側支持部92が位置RAに位置している。このとき、吊り下げ部60およびアーム30の重量と、ガススプリング40の弾性力による反力が釣り合うことによって、移載装置100の重量がバランスされている状態である「装置バランス状態」が維持されている。
【0028】
図2(B)に示すように、移載装置100がワークWを保持している状態では、上端側支持部92が係合孔35の位置RBに位置した姿勢で、ガススプリング40によるアーム30の支持を行っている。移載装置100がワークWを保持している状態では、作用点には、ワークWの荷重が作用するため、吊り下げ部60及びアーム30の荷重並びにワークWの荷重と釣り合うように、力点が位置RAよりも支点から遠い位置RBに作用するように、ガススプリング40によるアーム30の支持を行っている。
【0029】
移載装置100がワークWを保持している状態では、上端側支持部92が位置RBに位置している。このとき、吊り下げ部60、アーム30及びワークWの重量と、ガススプリング40の弾性力による反力が釣り合うことによって、ワークWの重量がバランスされている状態である「ワーク重量バランス状態」が維持されている。
【0030】
なお、上述したように、セルフロック機構によって、上端側支持部92は、係合孔35の任意の位置(位置RAと位置RBの間)にて一時的に停止できる。そのため、上端側支持部92の停止位置を調整して、ワークWの重量に対応した「ワーク重量バランス状態」が維持される。例えば、ワークWの重量が重い場合には上端側支持部92を係合孔35の位置RB側の適宜位置に停止させ、ワークWの重量が軽い場合には上端側支持部92を係合孔35の位置RA側の適宜位置に停止させることで、「ワーク重量バランス状態」を維持することができる。
【0031】
ここで、特記すべき事項として、位置RAまたは位置RBであっても、ガススプリング40の長さは変化していない。言い換えれば、移載装置100が「装置バランス状態」あるいは「ワーク重量バランス状態」であっても、ガススプリング40の反力は変化していない。
【0032】
また、位置RAから位置RBに移動するときには、ガススプリング40の長さは変化していない。言い換えれば、移載装置100が「装置バランス状態」から「ワーク重量バランス状態」まで移動するときには、ガススプリング40の反力は変化していない。なお、「ワーク重量バランス状態」から「装置バランス状態」まで移動するとき、すなわち位置RBから位置RAに移動するときであっても同様である。
【0033】
図3および図4を用いて、移載装置100による移載作業について説明する。
図3(A)から図4(C)までは、移載作業の一連の流れを順に模式的に示している。なお、図3および図4では、説明を分かり易くするため、移動機構50を省略して示している。
【0034】
本実施形態の移載装置100による移載作業では、作業者が重量物であるワークWを地点SAから地点SBまで移載する移載するときに、移載装置100によってワークWを保持し、作業者(図示略)によるワークWの移載を補助するものとする。また、地点SAと地点SBとの高さは、略同一とされている。
【0035】
図3(A)に示すように、作業者は、移載装置100を地点SAの近くまで移動させる。このとき、移載装置100では、ワークWを保持しない状態であって、上端側支持部92が位置RAに位置し、「装置バランス状態」が維持されている。
【0036】
図3(B)に示すように、作業者は、移載装置100のフック61にワークWを引っ掛ける。このとき、移載装置100は「装置バランス状態」であり、「装置バランス状態」が維持される範囲では、アーム30を人力にて基端側支持部91を中心にして回動することができるため、作業者によりフック61の高さ位置を調整することができる。そのため、作業者は、容易にワークWを引っ掛けることができる。
【0037】
作業者は、フック61にワークWを引っ掛けるのと略同時に、ハンドル51を回動して、上端側支持部92を位置RAから位置RBに移動させる。言い換えれば、作業者は、移載装置100を「装置バランス状態」から「ワーク重量バランス状態」に移行させる。「装置バランス状態」から「ワーク重量バランス状態」に移行するとき、ガススプリング40の長さは変化しないため、ガススプリング40の弾性力は変化しない。つまり、人力で上端側支持部92を位置RAから位置RBに移動させることができる。そのため、作業者は、容易に「装置バランス状態」から「ワーク重量バランス状態」に移行させることができる。
【0038】
図3(C)に示すように、作業者は、移載装置100によってワークWを持ち上げる。このとき、移載装置100は「ワーク重量バランス状態」であり、「ワーク重量バランス状態」が維持される範囲では、アーム30を人力にて基端側支持部91を中心にして回動することができるため、作業者によりフック61の高さ位置を調整することができる。そのため、作業者は、移載装置100によって容易にワークWを持ち上げることができる。
【0039】
図4(A)に示すように、作業者は、移載装置100を地点SBの近くまで移動させる。このとき、移載装置100は、移載装置100が「ワーク重量バランス状態」であるため、人力にてワークWの重量を支持することなく移載装置100を走行させ、方向転換させることができる。そのため、作業者は、容易に移載装置100を移動させることができる。
【0040】
図4(B)に示すように、作業者は、ワークWを地点SBに載置する。このとき、移載装置100は「ワーク重量バランス状態」であり、「ワーク重量バランス状態」が維持される範囲では、アーム30を人力にて基端側支持部91を中心にして回動することができるため、作業者によりフック61の高さ位置を調整することができる。そのため、作業者は、容易にワークWを地点SBに載置することができる。
【0041】
作業者は、ワークWを地点SBに載置するのと略同時に、ハンドル51を回動して、上端側支持部92を位置RBから位置RAに移動させる。言い換えれば、作業者は、移載装置100を「ワーク重量バランス状態」から「装置バランス状態」に移行させる。「ワーク重量バランス状態」から「装置バランス状態」に移行させるとき、ガススプリング40の長さは変化していないため、ガススプリング40の弾性力は変化しない。つまり、人力で上端側支持部92を位置RBから位置RAに移動させることができる。そのため、作業者は容易に「ワーク重量バランス状態」から「装置バランス状態」に移行させることができる。
【0042】
図4(C)に示すように、作業者は、移載装置100のフック61からワークWを取り外す。このとき、移載装置100が「装置バランス状態」であり、「装置バランス状態」が維持される範囲では、アーム30を人力にて基端側支持部91を中心にして回動することができるため、作業者によりフック61の位置を調整することができる。そのため、作業者は、容易にワークWを取り外すことができる。
【0043】
移載装置100の効果について説明する。
移載装置100によれば、移載装置100を低コストかつ省スペースな構成とすることができる。すなわち、移載装置100では、ガススプリング40および手動により操作される移動装置50を用いることによって駆動装置を不要とし、駆動装置を制御する制御盤も不要としている。そのため、移載装置100のコスト及びスペースが必然的に低減される。
【0044】
移載装置100によれば、移載装置100の保全性を向上できる。すなわち、移載装置100では、ガススプリング40および移動装置50を用いることによって駆動装置を不要とし、駆動装置を制御する制御盤も不要としている。そのため、駆動装置および制御盤の安全性に関する配慮も不要となる。つまり、移載装置100の保全性が向上される。
【0045】
移載装置100によれば、工場内での設置コスト及び設置工数を削減できる。従来、移載装置は、上方からホイストによってワークWを吊るす、あるいは、下方からエアシリンダによってワークWを支持する構成等であるため、工場内で設置するには、設置コストおよび設置工数が嵩んでいた。しかし、移載装置100によれば、人力によって容易に移動できるため、工場内での設置コスト及び設置工数が必然的に削減される。
【0046】
移載装置100によれば、移動時の操作性を向上できる。すなわち、移載装置100によれば、人力によって容易に移動できる。そのため、作業者は、移載装置100によってワークWを保持し、工場内を自由に移動できる。つまり、移載装置100の移動時の操作性が向上される。
【0047】
移載装置100によれば、載置時の操作性を向上できる。従来、移載装置は、上方からホイストによってワークを吊るす、あるいは、下方からエアシリンダによってワークを支持する構成等であるため、例えば移載装置に保持されたワークWを移載先に載置するときには載置位置等の微調整が難しく、操作性が悪かった。しかし、移載装置100によれば、「ワーク重量バランス状態」が維持される範囲では人力にて基端側支持部91を回動することができ、人力によって容易にワークWの位置を調整できる。そのため、移載装置100の載置時の操作性が向上される。
【0048】
移載装置100によれば、汎用性を向上できる。すなわち、移載装置100によれば、上端側支持部92の停止位置を調整すれば、ワークWの重量に対応した「ワーク重量バランス状態」を維持することができる。そのため、移載装置100は、様々なワークWを保持することができる。つまり、移載装置100の汎用性が向上される。
【0049】
移載装置100によれば、ガススプリング40の長さを変えずに上端側支持部92を位置RAから位置RBに移動させるため、人力によって容易に「装置バランス状態」から「ワーク重量バランス状態」への移行ができる。
【0050】
移載装置100によれば、円弧形状の長孔に形成される係合孔35に上端側支持部92を係合させることによって、簡易な構造によって、ガススプリング40の長さを変えずに上端側支持部92を位置RAから位置RBに移動させることができる。
【0051】
その他の実施形態について説明する。
本実施形態では、弾性体をガススプリング40とする構成としたが、これに限定されない。例えば、弾性体を弾性バネにケースを被装した構成としても良い。
【0052】
本実施形態では、変換機構52について、ハンドル51の回動を上端側支持部92の移動に変換する以外は特に限定していない。しかし、ハンドル51の回動を減速して上端側支持部92の移動に変換する減速機構を備える構成としても良い。
【符号の説明】
【0053】
10 走行部
20 支柱
30 アーム
31 基端側
32 中途部
33 先端側
35 係合孔
40 ガススプリング
50 移動装置
51 ハンドル
60 吊り下げ部
61 フック
91 基端側支持部
92 上端側支持部(アームの中途部の支持部)
93 先端側支持部
100 移載装置
【特許請求の範囲】
【請求項1】
作業者によるワークの移載を補助する移載装置であって、
前記ワークを先端側で保持するアームと、
前記アームの基端側を支持する支柱と、
前記アームの中途部を支持する弾性部材と、
前記弾性部材による前記アームの中途部の支持位置を移動させる移動装置と、
を具備する、
移載装置。
【請求項2】
請求項1記載の移載装置であって、
前記移動装置は、前記弾性部材の長さが変わらないように、前記弾性部材による前記アームの中途部の支持部を移動させる、
移載装置。
【請求項3】
請求項2記載の移載装置であって、
前記移動装置は、前記弾性部材による前記アームの中途部の支持部を、前記アームの中途部にて円弧形状の長孔に形成される係合孔に係合させて移動させる、
移載装置。
【請求項4】
請求項3記載の移載装置であって、
前記移動装置は、前記弾性部材による前記アームの中途部の支持部の移動を、前記係合孔の適宜位置にて一時停止させるセルフロック機構を具備する、
移載装置。
【請求項1】
作業者によるワークの移載を補助する移載装置であって、
前記ワークを先端側で保持するアームと、
前記アームの基端側を支持する支柱と、
前記アームの中途部を支持する弾性部材と、
前記弾性部材による前記アームの中途部の支持位置を移動させる移動装置と、
を具備する、
移載装置。
【請求項2】
請求項1記載の移載装置であって、
前記移動装置は、前記弾性部材の長さが変わらないように、前記弾性部材による前記アームの中途部の支持部を移動させる、
移載装置。
【請求項3】
請求項2記載の移載装置であって、
前記移動装置は、前記弾性部材による前記アームの中途部の支持部を、前記アームの中途部にて円弧形状の長孔に形成される係合孔に係合させて移動させる、
移載装置。
【請求項4】
請求項3記載の移載装置であって、
前記移動装置は、前記弾性部材による前記アームの中途部の支持部の移動を、前記係合孔の適宜位置にて一時停止させるセルフロック機構を具備する、
移載装置。
【図1】



【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−250808(P2012−250808A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2011−124582(P2011−124582)
【出願日】平成23年6月2日(2011.6.2)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願日】平成23年6月2日(2011.6.2)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
[ Back to top ]