
移送装置及び搬送システム
【課題】構造が簡単で搬送システムのコンパクト化に寄与する移送装置及びこれを備えたコンパクトな搬送システムを提供する。
【解決手段】移送装置18は、第1搬送コンベア14及び第2搬送コンベア16におけるこれらが小さい角をなす側の領域に位置する中心軸20の周りに回転して被搬送物12を回転駆動可能であり、且つ、中心軸20の側への動きを規制する内側回転ガイド部22と、被搬送物12の中心軸20の周りの回転の軌跡の最外周に沿う曲線である曲線部24を有し被搬送物12の中心軸20と反対の側への動きを規制し被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ案内する外側ガイド部26と、を含み、被搬送物12を被搬送物12の下面に接する部材に対して滑らせて被搬送物12の方向を連続的に変化させつつ被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ移送可能である。
【解決手段】移送装置18は、第1搬送コンベア14及び第2搬送コンベア16におけるこれらが小さい角をなす側の領域に位置する中心軸20の周りに回転して被搬送物12を回転駆動可能であり、且つ、中心軸20の側への動きを規制する内側回転ガイド部22と、被搬送物12の中心軸20の周りの回転の軌跡の最外周に沿う曲線である曲線部24を有し被搬送物12の中心軸20と反対の側への動きを規制し被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ案内する外側ガイド部26と、を含み、被搬送物12を被搬送物12の下面に接する部材に対して滑らせて被搬送物12の方向を連続的に変化させつつ被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ移送可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、屈曲部の上流側の搬送コンベアから下流側の搬送コンベアへ被搬送物を移送するための移送装置及びこれを備えた搬送システムに関する。
【背景技術】
【0002】
従来、例えば、屈曲部を有する所定の搬送経路に沿って、複数の試験管が列状に並んで収容される検体ラックのような平面視の形状が細長い被搬送物をその長手方向の一端が先頭部であるように案内して搬送するための搬送システムが知られている。このような搬送システムには搬送経路の屈曲部の上流側の第1搬送コンベアから下流側の第2搬送コンベアへ被搬送物を移送するための移送装置が備えられている。
【0003】
移送装置としては第1搬送コンベアと第2搬送コンベアの延長線上の交点に位置する中心軸周りに回転するターンテーブルを有するものが知られている。例えば第1搬送コンベアと第2搬送コンベアとが直角に設置される場合、まず第1搬送コンベアで搬送されてきた被搬送物を移送装置のターンテーブルに搬入し、次にターンテーブルを90°回転させて被搬送物の向きを第2搬送コンベアの搬送方向に一致させ、更にターンテーブルから第2搬送コンベアに被搬送物を搬出することにより、第1搬送コンベアから第2搬送コンベアへ被搬送物を移送するようになっている(例えば、特許文献1及び2参照)。このような移送装置のターンテーブルには、第1搬送コンベアからターンテーブルへの被搬送物の搬入、及びターンテーブルから第2搬送コンベアへの被搬送物の搬出のために、被搬送物が載置される部分の床面に被搬送物を長手方向に送るためのコンベアが備えられている。
【0004】
例えば、検体ラックは病院等において廊下等の天井に沿って搬送されることがあるため、このような搬送システムはコンパクトであることが望ましい。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−279341号公報
【特許文献2】特開2005−274289号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら上記の従来の搬送システムは移送装置のターンテーブルが回転することに加えターンテーブルが被搬送物を長手方向に送るためのコンベアを備えているため構造が複雑でコンパクト化が困難であった。又、ターンテーブルは第1搬送コンベアと第2搬送コンベアの延長線上の交点に位置する中心軸周りに回転するため、ターンテーブルは屈曲部の内側だけでなく外側にも突出し、この点でもコンパクト化が困難であった。
【0007】
本発明は上記従来の問題に鑑みてなされたものであって、構造が簡単で搬送システムのコンパクト化に寄与する移送装置及びこれを備えたコンパクトな搬送システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、屈曲部を有する所定の搬送経路に沿って平面視の形状が細長い被搬送物をその長手方向の一端が先頭部であるように案内して搬送するための搬送システムにおける前記屈曲部の上流側の第1搬送コンベアから下流側の第2搬送コンベアへ前記被搬送物を移送するための移送装置であって、前記第1搬送コンベア及び前記第2搬送コンベアにおけるこれらが小さい角をなす側の領域に位置する所定の中心軸の周りに回転して前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ回転駆動可能であり、且つ、前記中心軸の側から前記被搬送物に当接又は近接して前記被搬送物の前記中心軸の側への動きを規制する内側回転ガイド部と、平面視の形状が前記被搬送物の前記中心軸周りの回転の軌跡の最外周に沿う曲線である曲線部を有し前記中心軸と反対の側から前記被搬送物に当接又は近接して前記被搬送物の前記中心軸と反対の側への動きを規制し前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ案内する外側ガイド部と、を含み、前記被搬送物を該被搬送物の下面に接する部材に対して滑らせて前記被搬送物の方向を連続的に変化させつつ前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ移送可能である移送装置により上記目的を達成するものである。
【0009】
尚、前記第1搬送コンベアが前記被搬送物をその長手方向が前記第1搬送コンベアの搬送方向に平行であるように保持しつつ前記内側回転ガイド部による回転の開始位置まで搬送し、且つ、前記回転の開始位置の前記被搬送物に前記外側ガイド部の前記曲線部が当接又は近接するように前記曲線部が前記第1搬送コンベアで搬送される前記被搬送物の搬送想定領域よりも前記中心軸から離れる側に凹んでいてもよい。
【0010】
又、前記内側回転ガイド部は前記被搬送物の長手方向の前側の部分に対向する前側対向部と前記被搬送物の長手方向の後側の部分に対向する後側対向部とを有し、前記回転の開始位置まで前記前側対向部により前記被搬送物を前記第1搬送コンベアの搬送方向に案内し、前記被搬送物を回転駆動する時に前記前側対向部が前記被搬送物から離れると共に前記後側対向部が前記被搬送物に当接又は近接して前記被搬送物の前記中心軸の側への動きを規制するように前記前側対向部と前記後側対向部とを平面視において異なる角度で形成してもよい。
【0011】
この場合、前記内側回転ガイド部は前記後側対向部から突出し前記被搬送物の長手方向の前記先頭部と反対側の尾部に当接して前記被搬送物を付勢する突起部を更に有していてもよい。
【0012】
又、前記外側ガイド部の前記曲線部は前記内側回転ガイド部による回転の終了位置の前記被搬送物の前記先頭部が前記第2搬送コンベアで搬送される前記被搬送物の搬送想定領域に位置するように前記外側ガイド部の前記曲線部が前記第2搬送コンベアで搬送される前記被搬送物の搬送想定領域又はこれを前記第2搬送コンベアの搬送方向に延長した領域よりも前記中心軸から離れる側に凹んでいてもよい。
【0013】
又、前記外側ガイド部は平面視における形状が前記曲線部に接する直線であり、且つ、前記曲線部から前記第2搬送コンベアへ前記被搬送物を案内する直線部を更に備えていてもよい。
【0014】
又、前記中心軸は前記第1搬送コンベアからの距離と前記第2搬送コンベアからの距離とが等しい位置に設置されていてもよい。
【0015】
又、本発明は、上記のいずれかに記載の移送装置と、前記第1搬送コンベアと、前記第2搬送コンベアと、を備える搬送システムにより上記目的を達成するものである。
【0016】
尚、前記第1搬送コンベアは、前記第1搬送コンベアから前記第2搬送コンベアへ前記被搬送物が移送される位置よりも前記第1搬送コンベアの搬送方向の下流側まで延在され、前記外側ガイド部の前記曲線部の少なくとも一部は、前記中心軸と反対の側から前記被搬送物に当接又は近接して前記被搬送物の前記中心軸と反対の側への動きを規制し前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ案内するための移送用位置と前記第1搬送コンベアで搬送される前記被搬送物の搬送想定領域に干渉しない待機位置との間で移動可能であり、前記外側ガイド部の前記曲線部の少なくとも一部が前記移送用位置に配置されることにより前記第1搬送コンベアから前記第2搬送コンベアへ前記被搬送物を移送可能であり、前記外側ガイド部の前記曲線部の少なくとも一部が前記待機位置に配置されることにより前記第1搬送コンベアから前記第2搬送コンベアへ前記被搬送物が移送される位置よりも前記第1搬送コンベアの搬送方向の下流側へ前記被搬送物を移送可能であるようにしてもよい。
【発明の効果】
【0017】
本発明によれば、構造が簡単でコンパクト化に寄与する移送装置及びこれを備えたコンパクトな搬送システムを実現できる。
【図面の簡単な説明】
【0018】
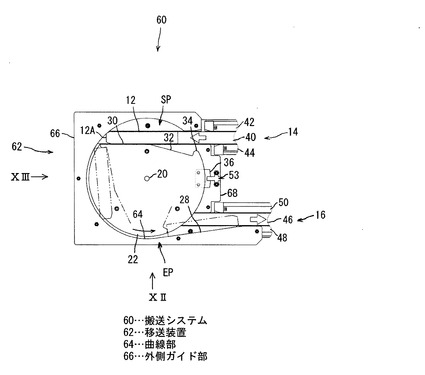
【図1】本発明の第1実施形態に係る搬送システムの構造を模式的に示す平面図
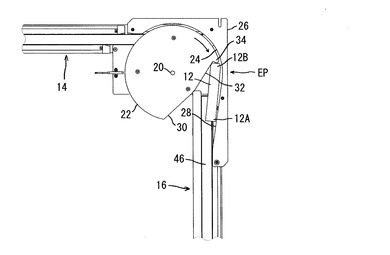
【図2】図1におけるIIから見た側面図
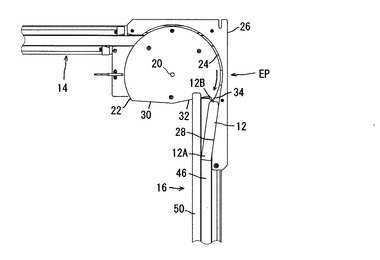
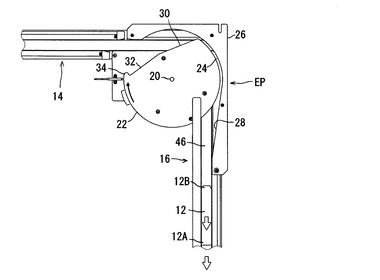
【図3】図1におけるIIIから見た側面図
【図4】同搬送システムの内側回転ガイド部及び外側ガイド部の下の部分の構造を示す平面図
【図5】被搬送物が回転の開始位置まで搬送された状態を模式的に示す平面図
【図6】前記内側回転ガイド部の後側対向部が同被搬送物に当接した状態を模式的に示す平面図
【図7】同被搬送物が前記外側ガイド部の曲線部に案内されて回転する状態を模式的に示す平面図
【図8】同被搬送物が回転の終了位置まで回転した状態を模式的に示す平面図
【図9】同被搬送物が前記外側ガイド部の直線部に案内されて第2搬送コンベアに移送される状態を模式的に示す平面図
【図10】同被搬送物が同第2搬送コンベアで搬送される状態を模式的に示す平面図
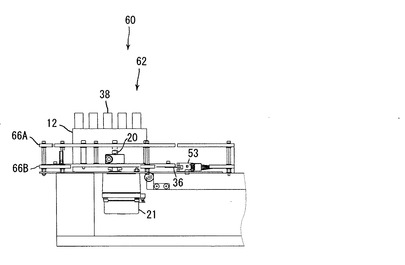
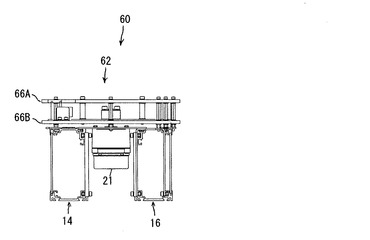
【図11】本発明の第2実施形態に係る搬送システムの構造を模式的に示す平面図
【図12】図11におけるXIIから見た側面図
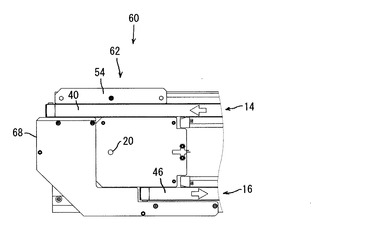
【図13】図11におけるXIIIから見た側面図
【図14】同搬送システムの内側回転ガイド部及び外側ガイド部の下の部分の構造を示す平面図
【図15】本発明の第3実施形態に係る搬送システムの構造を模式的に示す平面図
【図16】同搬送システムにおいて被搬送物が第1搬送コンベアの下流側へ搬送される状態を模式的に示す平面図
【図17】本発明の第4実施形態に係る搬送システムの構造を模式的に示す平面図
【図18】同搬送システムにおいて被搬送物が第2搬送コンベアの下流側へ搬送される状態を模式的に示す平面図
【発明を実施するための形態】
【0019】
以下、本発明の実施形態について図面を参照して詳細に説明する。
【0020】
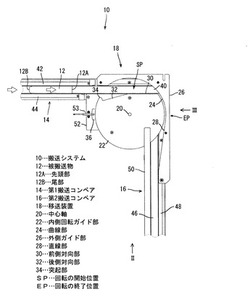
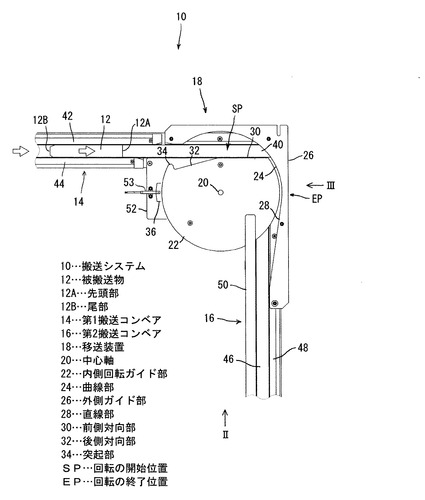
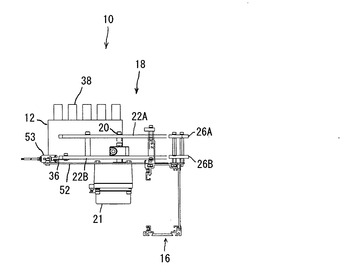
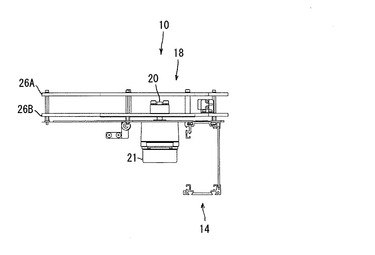
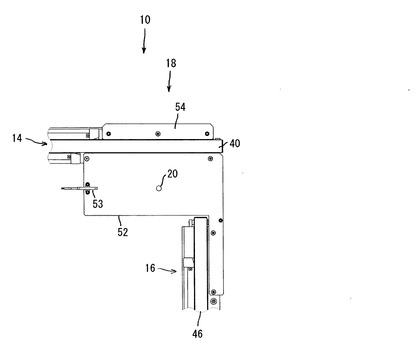
図1〜4に示されるように、本発明の第1実施形態に係る搬送システム10は、L字状の90°の屈曲部を有する搬送経路に沿って平面視の形状が細長い被搬送物12をその長手方向の一端が先頭部であるように案内して搬送するためのものであり屈曲部の上流側の第1搬送コンベア14と、下流側の第2搬送コンベア16と、第1搬送コンベア14から第2搬送コンベア16へ被搬送物12を移送するための移送装置18と、を備えている。
【0021】
移送装置18は、第1搬送コンベア14及び第2搬送コンベア16におけるこれらが小さい角をなす側の領域に位置する中心軸20の周りに回転して被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ回転駆動可能であり、且つ、中心軸20の側から被搬送物12に当接又は近接して被搬送物12の中心軸20の側への動きを規制する内側回転ガイド部22と、平面視の形状が被搬送物12の中心軸20の周りの回転の軌跡(図6〜8参照)の最外周に沿う円弧形の曲線である曲線部24を有し中心軸20と反対の側から被搬送物12に当接又は近接して被搬送物12の中心軸20と反対の側への動きを規制し被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ案内する外側ガイド部26と、を含み、被搬送物12を被搬送物12の下面に接する部材に対して滑らせて被搬送物12の方向を連続的に変化させつつ被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ移送可能である。
【0022】
中心軸20は第1搬送コンベア14からの距離と第2搬送コンベア16からの距離とが等しい位置に設置されている。中心軸20はモータ21に直接的又は間接的に接続されており、モータ21の駆動力で内側回転ガイド部22が回転するようになっている。
【0023】
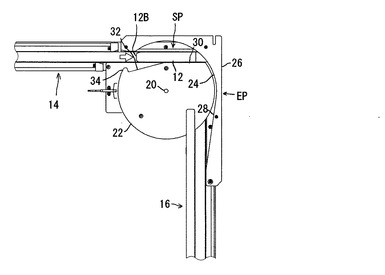
外側ガイド部26の曲線部24は、第1搬送コンベア14が被搬送物12をその長手方向が第1搬送コンベア14の搬送方向に平行であるように保持しつつ内側回転ガイド部22による回転の開始位置SPまで搬送し、且つ、回転の開始位置SPの被搬送物12に外側ガイド部26の曲線部24が当接又は近接するよう、第1搬送コンベア14で搬送される被搬送物12の搬送想定領域よりも中心軸20から離れる側に凹んでいる(図5参照)。
【0024】
又、外側ガイド部26の曲線部24は、内側回転ガイド部22による回転の終了位置EPの被搬送物12の先頭部12Aが第2搬送コンベア16で搬送される被搬送物12の搬送想定領域に位置するように、第2搬送コンベア16で搬送される被搬送物12の搬送想定領域又はこれを第2搬送コンベア16の搬送方向に延長した領域よりも中心軸20から離れる側に凹んでいる(図8参照)。
【0025】
又、外側ガイド部26は、平面視における形状が曲線部24に接する直線であり、且つ、曲線部24から第2搬送コンベア16へ被搬送物12を案内する直線部28を備えている。
【0026】
尚、外側ガイド部26は、上側板部26Aと下側板部26Bとが柱部材等で連結された構成である。
【0027】
内側回転ガイド部22は、円板の一部を切り欠いたような形状であり、切り欠き部分に被搬送物12の長手方向の前側の部分に対向する前側対向部30と、被搬送物12の長手方向の後側の部分に対向する後側対向部32とを有している(図5、6参照)。回転の開始位置SPまで前側対向部30により被搬送物12を第1搬送コンベア14の搬送方向に案内し(図5参照)、被搬送物12を回転駆動する時に前側対向部30が被搬送物12から離れると共に後側対向部32が被搬送物12に当接又は近接して被搬送物12の中心軸20の側への動きを規制する(図6参照)ように前側対向部30と後側対向部32とは平面視において異なる角度で形成されている。
【0028】
又、内側回転ガイド部22は、後側対向部32から突出し被搬送物12の長手方向の先頭部12Aと反対側の尾部12Bに当接して被搬送物12を付勢する突起部34を更に有している。突起部34の突出長さは、内側回転ガイド部22が基準位置(前側対向部30が第1搬送コンベア14の搬送方向と平行になる位置)に保持された状態において、第1搬送コンベア14で搬送される被搬送物12の搬送想定領域に干渉しない範囲に制限されている。
【0029】
尚、内側回転ガイド部22は、上側板部22Aと下側板部22Bとが柱部材等で連結された構成である。又、下側板部22Bの外周には内側回転ガイド部22の回転位置を検出するための被検出材36が設置されている。
【0030】
被搬送物12は、複数の試験管38が列状に並んで収容される検体ラックである。
【0031】
第1搬送コンベア14は、回転の開始位置SPまで延在されたベルト部40を有している。又、第1搬送コンベア14は、被搬送物12をその長手方向と垂直な幅方向の両側から挟むように保持し被搬送物12を長手方向がベルト部40の方向と平行な方向であるように被搬送物12の姿勢を規制する外側ガイド部42及び内側ガイド部44を有している。外側ガイド部42は回転の開始位置SPの側の先端が外側ガイド部26に隣接するように設置されている。尚、内側ガイド部44は、回転の開始位置SPの側の先端が外側ガイド部42の回転の開始位置SPの側の先端よりも若干引き込んでいる。
【0032】
第2搬送コンベア16は、回転の終了位置EPの近傍まで延在されたベルト部46を有している。又、第2搬送コンベア16は、被搬送物12をその長手方向と垂直な幅方向の両側から挟むように保持し被搬送物12を長手方向がベルト部46の方向と平行な方向であるように被搬送物12の姿勢を規制する外側ガイド部48及び内側ガイド部50を有している。外側ガイド部48は回転の終了位置EPの側の先端が外側ガイド部26に隣接するように設置されている。一方、内側ガイド部50は、回転の終了位置EPの側の先端が外側ガイド部48の回転の終了位置EPの側の先端よりも突出して外側ガイド部26の直線部28と対向するように内側回転ガイド部22の上まで延在されており、外側ガイド部26の直線部28と共に回転の終了位置EPから第2搬送コンベア16へ被搬送物12を案内するようになっている。
【0033】
内側回転ガイド部22及び外側ガイド部26の下には、第1搬送コンベア14と第2搬送コンベア16との間で被搬送物12を下方から支持するための主固定床面部52が第1搬送コンベア14と第2搬送コンベア16との間の隙間を埋めるように設置されている。主固定床面部52は、回転の終了位置EPにおいて被搬送物12を下方から支持可能であるように、第2搬送コンベア16で搬送される被搬送物12の搬送想定領域を第2搬送コンベア16の搬送方向に延長した領域よりも中心軸20から離れる側の領域まで延在されている。尚、主固定床面部52には、内側回転ガイド部22に設置された被検出材36の有無を検知するためのピックアップ53が設置されている。ピックアップ53が被検出材36を検出することにより、内側回転ガイド部22が基準位置(前側対向部30が第1搬送コンベア14の搬送方向と平行になる位置)に位置することを検知できるようになっている。
【0034】
又、回転の開始位置SPにおいて被搬送物12を下方から支持可能であるように、第1搬送コンベア14で搬送される被搬送物12の搬送想定領域よりも中心軸20から離れる側の領域には、副固定床面部54が設置されている。尚、副固定床面部54、主固定床面部52、第1搬送コンベア14のベルト部40、第2搬送コンベア16のベルト部46が、前述の被搬送物12の下面に接する部材に相当する。
【0035】
次に、搬送システム10の作用について説明する。
【0036】
まず、図5に示されるように、基準位置(前側対向部30が第1搬送コンベア14の搬送方向に平行である回転位置)に内側回転ガイド部22を保持し、この状態で第1搬送コンベア14が被搬送物12をその長手方向が第1搬送コンベア14の搬送方向に平行であるように保持しつつ内側回転ガイド部22による回転の開始位置SPまで搬送する。
【0037】
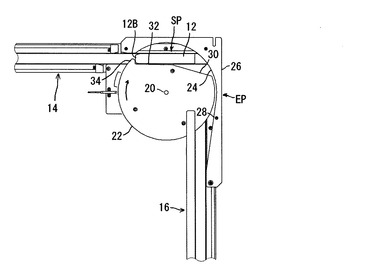
次に、図6に示されるように内側回転ガイド部22が回転し始めると前側対向部30が被搬送物12から離れると共に突起部34が被搬送物12の尾部12Bに当接して被搬送物12の回転駆動を開始する。又、後側対向部32が被搬送物12に当接又は近接して被搬送物12の中心軸20の側への動きを規制する。
【0038】
図7に示されるように内側回転ガイド部22が更に回転すると、被搬送物12は内側回転ガイド部22の後側対向部32により中心軸20の側への動きが規制されつつ外側ガイド部26の曲線部24に案内されて中心軸20の周りに回転する。尚、この際、被搬送物12は、第1搬送コンベア14のベルト部40、副固定床面部54及び主固定床面部52の上を滑りながら方向(姿勢)が連続的に変化する。
【0039】
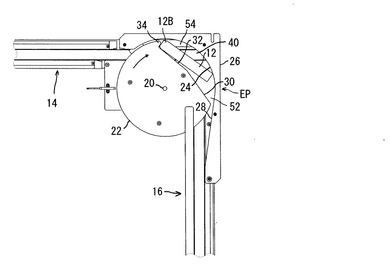
図8に示されるように、被搬送物12が回転の終了位置EPまで回転すると、その後、被搬送物12は外側ガイド部26の直線部28に案内されて先頭部12Aが第2搬送コンベア16のベルト部46の上に載置される。
【0040】
図9に示されるように内側回転ガイド部22が更に回転すると、被搬送物12は内側回転ガイド部22の突起部34により尾部12Bの側から押されると共に第2搬送コンベア16のベルト部46により先頭部12Aの側に引かれて第2搬送コンベア16のベルト部46の上に載置される。この際、被搬送物12は外側ガイド部26の直線部28及び第2搬送コンベア16の内側ガイド部50に案内されて、主固定床面部52及びベルト部46の上を滑りながら、図10に示されるように長手方向が第2搬送コンベア16の搬送方向(ベルト部46の搬送方向)に平行である姿勢に矯正されて第2搬送コンベア16の上に載置される。これにより第1搬送コンベア14から第2搬送コンベア16への被搬送物12の移送が完了する。尚、被搬送物12は、その後第2搬送コンベア16により所定の目的位置へ搬送される。
【0041】
一方、内側回転ガイド部22は更に回転して基準位置へ戻り、上記と同様の要領で次の被搬送物12の第1搬送コンベア14から第2搬送コンベア16への移送が行われる。
【0042】
このように移送装置18は、駆動部分が内側回転ガイド部22のみであるが、被搬送物12を副固定床面部54、主固定床面部52、第1搬送コンベア14のベルト部40、第2搬送コンベア16のベルト部46(被搬送物12の下面に接する部材)に対して滑らせて被搬送物12の方向を連続的に変化させつつ被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ移送することができる。
【0043】
この移送装置18は、駆動部分が内側回転ガイド部22のみであるので構造が簡単でコンパクトであり、搬送システムのコンパクト化に寄与する。特に、下方への突出を抑制でき搬送システムの上下方向のコンパクト化に寄与する。従って、例えば搬送システムを病院等の天井に設置する場合等に好適である。
【0044】
又、内側回転ガイド部22の中心軸20は、第1搬送コンベア14及び第2搬送コンベア16におけるこれらが小さい角をなす側の領域に位置するので、移送装置18は、第1搬送コンベア14及び第2搬送コンベア16が大きい角をなす側への突出も抑制されており、搬送システムの水平方向のコンパクト化にも寄与する。
【0045】
又、移送装置18は、被搬送物12を被搬送物12の下面に接する部材に対して滑らせて被搬送物12の方向を連続的に変化させつつ被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ移送するので、第1搬送コンベアで搬送されてきた被搬送物を移送装置のターンテーブルに搬入し、次にターンテーブルを90°回転させて被搬送物の向きを第2搬送コンベアの搬送方向に一致させ、更にターンテーブルから第2搬送コンベアに被搬送物を搬出する従来の移送装置よりも短時間で移送を完了することができ、搬送効率の向上にも寄与する。尚、第1搬送コンベア14から移送装置18への被搬送物12の搬入や、移送装置18から第2搬送コンベア16への被搬送物12の搬出の際も、被搬送物12を静止させる必要はない。
【0046】
次に、本発明の第2実施形態について説明する。前記第1実施形態に係る搬送システム10はL字状の90°の屈曲部を有する搬送経路に沿って被搬送物12を搬送するためのものであるのに対し、図11〜14に示されるように、本第2実施形態に係る搬送システム60は、U字型の180°の屈曲部を有する搬送経路に沿って被搬送物12を搬送するためのものであり、第1搬送コンベア14の搬送方向と第2搬送コンベア16の搬送方向とが180°異なっている。尚、このように第1搬送コンベア14の搬送方向と第2搬送コンベア16の搬送方向とが180°異なっている場合、第1搬送コンベア14及び第2搬送コンベア16で挟まれる領域を、第1搬送コンベア14及び第2搬送コンベア16におけるこれらが小さい角をなす側の領域と定義する。
【0047】
搬送システム60の移送装置62は、前記第1実施形態に係る移送装置18の外側ガイド部26に代えて、外側ガイド部26の曲線部24よりも被搬送物12を案内する角度が90°大きい円弧形の曲線部64を有する外側ガイド部66を備えている。尚、外側ガイド部66は、上側板部66Aと下側板部66Bとが柱部材等で連結された構成である。
【0048】
又、移送装置62は、前記第1実施形態に係る主固定床面部52に代えて、外側ガイド部26の曲線部24よりも被搬送物12を案内する角度が90°大きい曲線部64を有する外側ガイド部66に対応する主固定床面部68を備えている。
【0049】
他の構成については、前記第1実施形態と同様であるので同様の構成については前記図1〜10と同一の符号を付することとして説明を省略する。
【0050】
本第2実施形態に係る移送装置62も、前記第1実施に係る移送装置18と同様に、搬送システムのコンパクト化、及び搬送効率の向上に寄与する。
【0051】
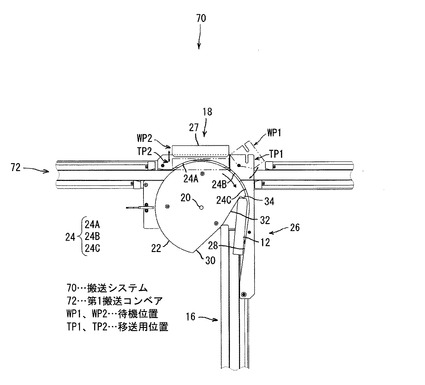
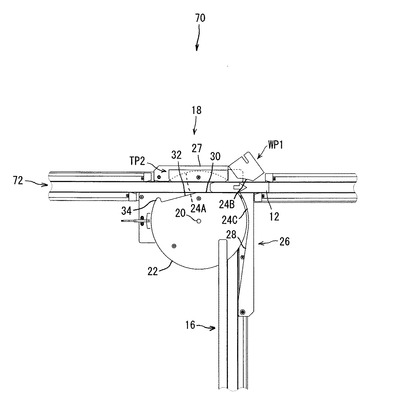
次に、本発明の第3実施形態について説明する。前記第1及び第2実施形態に係る搬送システム10(60)は、外側ガイド部26(66)が固定されており、第1搬送コンベア14で搬送される総ての被搬送物12が第2搬送コンベア16に移送されるようになっている。これに対し、図15及び16に示されるように、本第3実施形態に係る搬送システム70は、第1搬送コンベア72が、第1搬送コンベア72から第2搬送コンベア16へ被搬送物12が移送される位置よりも第1搬送コンベア72の搬送方向の下流側まで延在されており、被搬送物12を第1搬送コンベア72の搬送方向の下流側又は第2搬送コンベア16に分配できるようになっている。
【0052】
又、外側ガイド部26は、曲線部24が第1曲線部24Aと第2曲線部24Bと第3曲線部24Cとに分割されている。第1曲線部24Aと第2曲線部24Bと第3曲線部24Cとはこの順で上流側から下流側に並んでいる。第2曲線部24Bは、図示しない駆動装置により、中心軸20と反対の側から被搬送物12に当接又は近接して被搬送物12の中心軸20と反対の側への動きを規制し被搬送物12を第1搬送コンベア72から第2搬送コンベア16へ案内するための移送用位置TP1と、第1搬送コンベア72で搬送される被搬送物12の搬送想定領域に干渉しない待機位置WP1と、の間で移動可能である。尚、第1曲線部24Aは、第1搬送コンベア72で搬送される被搬送物12の搬送想定領域に干渉しないように固定されている。又、第3曲線部24Cは、直線部28と一体で設けられており直線部28と共に固定されている。
【0053】
又、外側ガイド部26は、第1曲線部24Aの上面に沿って移動可能である可動直線ガイド部27を備えている。可動直線ガイド部27は、第1曲線部24Aの凹部を上方から覆うように配置されて被搬送物12を第1搬送コンベア14の搬送方向に案内するための移送用位置TP2と、第1曲線部24Aに案内されつつ回転する被搬送物12の回転移送領域に干渉しない待機位置WP2との間で移動可能である。
【0054】
他の構成については、前記第1実施形態と同様であるので同様の構成については前記図1〜10と同一の符号を付することとして説明を省略する。
【0055】
図15に示されるように、第2曲線部24Bが移送用位置TP1に配置されることにより、前記第1実施形態と同様に第1搬送コンベア72から第2搬送コンベア16へ被搬送物12を移送可能である。尚、この場合、可動直線ガイド部27は待機位置WP2に保持しておく。
【0056】
一方、図16に示されるように、第2曲線部24Bが待機位置WP1に配置されることにより、第1搬送コンベア72から第2搬送コンベア16へ被搬送物12が移送される位置よりも第1搬送コンベア72の搬送方向の下流側へ被搬送物12を移送可能である。尚、この場合、可動直線ガイド部27は移送用位置TP2に保持しておく。又、内側回転ガイド部22は基準位置(前側対向部30が第1搬送コンベア72の搬送方向に平行である回転位置)に保持しておく。
【0057】
このように本第3実施形態に係る搬送システム70によれば、被搬送物12を2つの異なる経路に分配して搬送することができる。尚、図15及び16では、第2曲線部24Bの待機位置WP1は移送用位置TP1に対して水平方向にずれているように図示されているが、待機位置WP1は移送用位置TP1に対して上下方向にずれていてもよい。又、待機位置WP1は移送用位置TP1に対して水平方向及び上下方向にずれていてもよい。又、図15及び16では、第2曲線部24Bは待機位置WP1に配置されている時の姿勢が移送用位置TP1に配置されている時の姿勢に対して平面視において回転するようになっているが、第2曲線部24Bは平面視において回転することなく待機位置WP1と移送用位置TP1との間で平行移動するようにしてもよい。可動直線ガイド部27の移送用位置TP2と待機位置WP2との間の移動についても同様である。
【0058】
又、図15及び16では、曲線部24のうちの第2曲線部24Bだけが待機位置WP1と移送用位置TP1との間で移動するようになっているが、第1曲線部24Aと第2曲線部24Bとが一体で待機位置と移送用位置との間で移動するようにしてもよい。この場合、第1曲線部24Aと第2曲線部24Bとは分割されていない一体の構造としてもよい。又、曲線部24全体が待機位置と移送用位置との間で移動するようにしてもよい。この場合、曲線部24は第1曲線部24Aと第2曲線部24Bと第3曲線部24Cとに分割されていない一体の構造としてもよい。又、外側ガイド部26全体が待機位置と移送用位置との間で移動するようにしてもよい。この場合、外側ガイド部26は曲線部24と直線部28とに分割されていない一体の構造としてもよい。
【0059】
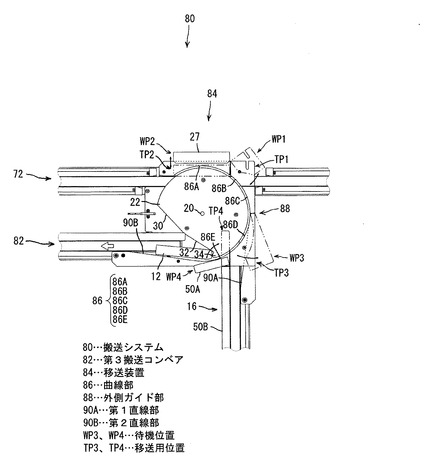
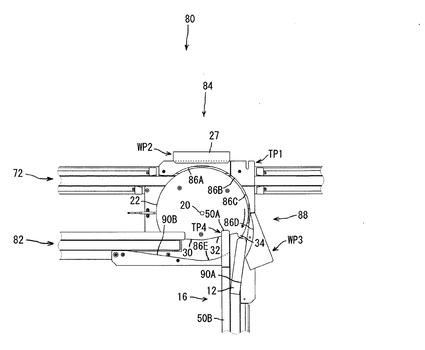
次に、本発明の第4実施形態について説明する。図17及び18に示されるように、本第4実施形態に係る搬送システム80は、前記第3実施形態に対し、第2搬送コンベア16の下流側に更に第3搬送コンベア82が備えられ、第2搬送コンベア16から第3搬送コンベア82へ被搬送物12を移送可能である。第3搬送コンベア82は、搬送方向が第2搬送コンベア16の搬送方向に対し90°異なり、第1搬送コンベア72に対し180°異なる。尚、第2搬送コンベア16は、第2搬送コンベア16から第3搬送コンベア82へ被搬送物12が移送される位置よりも第2搬送コンベア16の搬送方向の下流側まで延在されており、この第2搬送コンベア16の下流側の部分へも被搬送物12を搬送可能である。搬送システム80は、被搬送物12を第1搬送コンベア72の下流側、第2搬送コンベア16の下流側又は第3搬送コンベア82に分配できるようになっている。
【0060】
搬送システム80は、前記第2実施形態に係る移送装置62と鏡面対称のような構成の移送装置84を備えている。移送装置84の外側ガイド部88は、曲線部86と、第1直線部90Aと、第2直線部90Bと、可動直線ガイド部27と、を備えている。曲線部86は、第1曲線部86Aと第2曲線部86Bと第3曲線部86Cと第4曲線部86Dと第5曲線部86Eとに分割されている。第1曲線部86Aと第2曲線部86Bと第3曲線部86Cと第4曲線部86Dと第5曲線部86Eとはこの順で上流側から下流側に並んでいる。
【0061】
第1曲線部86Aは、前記第3実施形態に係る第1曲線部24Aと同様の構成であり、第1搬送コンベア72で搬送される被搬送物12の搬送想定領域に干渉しないように固定されている。第2曲線部86Bは、前記第3実施形態に係る第2曲線部24Bと同様の構成であり、図示しない駆動装置により、中心軸20と反対の側から被搬送物12に当接又は近接して被搬送物12の中心軸20と反対の側への動きを規制し被搬送物12を第1搬送コンベア72から第2搬送コンベア16へ案内するための移送用位置TP1と第1搬送コンベア72で搬送される被搬送物12の搬送想定領域に干渉しない待機位置WP1との間で移動可能である。第3曲線部86Cは、第1直線部90Aと一体で設けられており第1直線部90Aと共に固定されている。第4曲線部86Dは第1直線部90Aの上面に沿って配置されている。第4曲線部86Dは、図示しない駆動装置により、中心軸20と反対の側から被搬送物12に当接又は近接して被搬送物12の中心軸20と反対の側への動きを規制し被搬送物12を第2搬送コンベア16から第3搬送コンベア82へ案内するための移送用位置TP3と第2搬送コンベア16で搬送される被搬送物12の搬送想定領域に干渉しない待機位置WP3との間で移動可能である。又、第5曲線部86Eは、第2直線部90Bと一体で設けられており第2直線部90Bと共に固定されている。
【0062】
第1直線部90Aは、第3曲線部86Cに接し、第3曲線部86Cから第2搬送コンベア16へ被搬送物12を案内するように配置されている。第2直線部90Bは、第5曲線部86Eに接し、第5曲線部86Eから第3搬送コンベア82へ被搬送物12を案内するように配置されている。
【0063】
又、第2搬送コンベア16の内側ガイド部50は先端部50Aと基部50Bとが別体の構造であり、先端部50Aは、第5曲線部86Eの上面に沿って配置されている。先端部50Aは、図示しない駆動装置により、第2搬送コンベア16から第3搬送コンベア82への被搬送物12の移送を規制して被搬送物12を第2搬送コンベア16へ案内する移送用位置TP4と、第2搬送コンベア16から第3搬送コンベア82への被搬送物12の移送想定領域に干渉しない待機位置WP4との間で移動可能である。
【0064】
他の構成については、前記第1〜第3実施形態と同様であるので同様の構成については前記図1〜16と同一の符号を付することとして説明を省略する。
【0065】
搬送システム80の作用について説明する。尚、第1搬送コンベア72から第2搬送コンベア16又は第1搬送コンベア72の搬送方向の下流側へのいずれかへ被搬送物12を分配する作用については、前記第3実施形態と同様であるので説明を省略する。
【0066】
図17に示されるように、第2曲線部86Bが移送用位置TP1に配置され、第4曲線部86Dが移送用位置TP3に配置されることにより、第1搬送コンベア72から第2搬送コンベア16を経由して第3搬送コンベア82へ被搬送物12を移送可能である。尚、この場合、可動直線ガイド部27は待機位置WP2に保持しておく。又、第2搬送コンベア16の内側ガイド部50の先端部50Aは待機位置WP4に保持しておく。
【0067】
一方、図18に示されるように、第2曲線部86Bが移送用位置TP1に配置され、第4曲線部86Dが待機位置WP3に配置され、第2搬送コンベア16の内側ガイド部50の先端部50Aが移送用位置TP4位置に配置されることにより、第2搬送コンベア16から第3搬送コンベア82へ被搬送物12が移送される位置よりも第2搬送コンベア16の搬送方向の下流側へ被搬送物12を移送可能である。尚、この場合も、可動直線ガイド部27は待機位置WP2に保持しておく。
【0068】
このように搬送システム80によれば、被搬送物12を3つの異なる経路に分配して搬送することができる。
【0069】
尚、前記第1〜第4実施形態に係る搬送システム10、60、70、80はL字状の90°の屈曲部及び/又はU字状の180°の屈曲部を有する搬送経路に沿って被搬送物12を搬送するためのものであるが、本発明は90°や180°以外の角度の屈曲部を有する搬送経路に沿って被搬送物を搬送するための搬送システムにも適用可能である。この場合、上流側の搬送コンベア及び下流側の搬送コンベアがなす角(屈曲部の角)に対応する、適当な角度の曲線部を有する外側ガイド部を移送装置に備えればよい。
【0070】
又、前記第1〜第3実施形態において、外側ガイド部26(66)は、上側板部26A(66A)と下側板部26B(66B)とが柱部材等で連結された構成であるが、外側ガイド部は、1枚の板状部材からなる構成でもよいし、3枚以上の板状部材からなる構成としてもよい。前記第4実施形態の外側ガイド部88についても同様である。
【0071】
又、前記第1〜第4実施形態において、外側ガイド部26(66、88)の曲線部24(64、86)は平面視において円弧形であるが、被搬送物12の中心軸20周りの回転の軌跡の最外周に沿う曲線であれば、外側ガイド部の曲線部の平面視の形状は円弧形から若干外れた形状の曲線であってもよい。
【0072】
又、前記第1〜第4実施形態において、外側ガイド部26(66、88)は、曲線部24(64、86)から下流側の搬送コンベアへ被搬送物12を案内する直線部28(90A、90B)を備えているが、被搬送物12を上流側の搬送コンベアから下流側の搬送コンベアへ確実に移送できれば、外側ガイド部は直線部に代えて曲線部24(64、86)から下流側の搬送コンベアへ被搬送物12を案内する他の曲線部を備える構成としてもよい。又、被搬送物12を上流側の搬送コンベアから下流側の搬送コンベアへ確実に移送できれば、外側ガイド部は被搬送物12の中心軸20周りの回転の軌跡の最外周に沿う曲線部のみを備える構成としてもよい。
【0073】
又、前記第1〜第4実施形態において、外側ガイド部26(66、88)の曲線部24(64、86)は、第1搬送コンベア14(72)で搬送される被搬送物12の搬送想定領域や、第2搬送コンベア16で搬送される被搬送物12の搬送想定領域又はこれを第2搬送コンベア16の搬送方向に延長した領域よりも中心軸20から離れる側に凹んでいるが、被搬送物12を上流側の搬送コンベアから下流側の搬送コンベアへ確実に移送できれば、外側ガイド部の曲線部は、第1搬送コンベア14(72)で搬送される被搬送物12の搬送想定領域及び/又は第2搬送コンベア16で搬送される被搬送物12の搬送想定領域又はこれを第2搬送コンベア16の搬送方向に延長した領域よりも中心軸20から離れる側に凹んでいなくてもよい。
【0074】
又、前記第1〜第4実施形態において、内側回転ガイド部22の中心軸20は第1搬送コンベア14(72)からの距離と第2搬送コンベア16からの距離とが等しい位置に設置されているが、被搬送物12を上流側の搬送コンベアから下流側の搬送コンベアへ確実に移送できれば、内側回転ガイド部22の中心軸20は第1搬送コンベア14(72)からの距離と第2搬送コンベア16からの距離とが異なる位置に設置されていてもよい。
【0075】
又、前記第1〜第4実施形態において、内側回転ガイド部22は後側対向部32から突出し被搬送物12の尾部12Bに当接して被搬送物12を付勢する突起部34を有するが、被搬送物12を上流側の搬送コンベアから下流側の搬送コンベアへ確実に移送できれば、内側回転ガイド部は突起部を備えず、例えば後側対向部32において被搬送物12の側面に当接して被搬送物12を付勢する構成としてもよい。
【0076】
又、前記第1〜第4実施形態において、内側回転ガイド部22は前側対向部30と後側対向部32とが平面視において異なる角度で形成されているが、被搬送物12を上流側の搬送コンベアから下流側の搬送コンベアへ確実に移送できれば、前側対向部と後側対向部とが同じ角度で形成されていてもよい(前側、後側の区別がない対向部でもよい)。
【0077】
又、前記第1〜第4実施形態において、内側回転ガイド部22は、円板の一部を切り欠いたような平面視の形状であるが、被搬送物12に当接又は近接する部分以外の形状は特に限定されない。
【0078】
又、前記第1〜第4実施形態において、内側回転ガイド部22は、上側板部22Aと下側板部22Bとが柱部材等で連結された構成であるが、内側固定ガイド部は、1枚の板状部材からなる構成でもよいし、3枚以上の板状部材からなる構成としてもよい。
【0079】
又、前記第1〜第4実施形態において、被搬送物12は複数の試験管38が列状に並んで収容される検体ラックであるが、平面視の形状が細長い被搬送物であれば検体ラック以外の被搬送物の搬送にも本発明は適用可能である。
【産業上の利用可能性】
【0080】
本発明は、屈曲部を有する所定の搬送経路に沿って、複数の試験管が列状に並んで収容される検体ラックのような平面視の形状が細長い被搬送物をその長手方向の一端が前端であるように案内して搬送するための搬送システムに利用することができる。
【符号の説明】
【0081】
10、60、70、80…搬送システム
12…被搬送物
12A…先頭部
12B…尾部
14、72…第1搬送コンベア
16…第2搬送コンベア
18、62、84…移送装置
20…中心軸
22…内側回転ガイド部
24、64、86…曲線部
26、66、88…外側ガイド部
28…直線部
30…前側対向部
32…後側対向部
34…突起部
82…第3搬送コンベア
90A…第1直線部
90B…第2直線部
SP…回転の開始位置
EP…回転の終了位置
TP1、TP2、TP3、TP4…移送用位置
WP1、WP2、WP3、WP4…待機位置
【技術分野】
【0001】
本発明は、屈曲部の上流側の搬送コンベアから下流側の搬送コンベアへ被搬送物を移送するための移送装置及びこれを備えた搬送システムに関する。
【背景技術】
【0002】
従来、例えば、屈曲部を有する所定の搬送経路に沿って、複数の試験管が列状に並んで収容される検体ラックのような平面視の形状が細長い被搬送物をその長手方向の一端が先頭部であるように案内して搬送するための搬送システムが知られている。このような搬送システムには搬送経路の屈曲部の上流側の第1搬送コンベアから下流側の第2搬送コンベアへ被搬送物を移送するための移送装置が備えられている。
【0003】
移送装置としては第1搬送コンベアと第2搬送コンベアの延長線上の交点に位置する中心軸周りに回転するターンテーブルを有するものが知られている。例えば第1搬送コンベアと第2搬送コンベアとが直角に設置される場合、まず第1搬送コンベアで搬送されてきた被搬送物を移送装置のターンテーブルに搬入し、次にターンテーブルを90°回転させて被搬送物の向きを第2搬送コンベアの搬送方向に一致させ、更にターンテーブルから第2搬送コンベアに被搬送物を搬出することにより、第1搬送コンベアから第2搬送コンベアへ被搬送物を移送するようになっている(例えば、特許文献1及び2参照)。このような移送装置のターンテーブルには、第1搬送コンベアからターンテーブルへの被搬送物の搬入、及びターンテーブルから第2搬送コンベアへの被搬送物の搬出のために、被搬送物が載置される部分の床面に被搬送物を長手方向に送るためのコンベアが備えられている。
【0004】
例えば、検体ラックは病院等において廊下等の天井に沿って搬送されることがあるため、このような搬送システムはコンパクトであることが望ましい。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−279341号公報
【特許文献2】特開2005−274289号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら上記の従来の搬送システムは移送装置のターンテーブルが回転することに加えターンテーブルが被搬送物を長手方向に送るためのコンベアを備えているため構造が複雑でコンパクト化が困難であった。又、ターンテーブルは第1搬送コンベアと第2搬送コンベアの延長線上の交点に位置する中心軸周りに回転するため、ターンテーブルは屈曲部の内側だけでなく外側にも突出し、この点でもコンパクト化が困難であった。
【0007】
本発明は上記従来の問題に鑑みてなされたものであって、構造が簡単で搬送システムのコンパクト化に寄与する移送装置及びこれを備えたコンパクトな搬送システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、屈曲部を有する所定の搬送経路に沿って平面視の形状が細長い被搬送物をその長手方向の一端が先頭部であるように案内して搬送するための搬送システムにおける前記屈曲部の上流側の第1搬送コンベアから下流側の第2搬送コンベアへ前記被搬送物を移送するための移送装置であって、前記第1搬送コンベア及び前記第2搬送コンベアにおけるこれらが小さい角をなす側の領域に位置する所定の中心軸の周りに回転して前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ回転駆動可能であり、且つ、前記中心軸の側から前記被搬送物に当接又は近接して前記被搬送物の前記中心軸の側への動きを規制する内側回転ガイド部と、平面視の形状が前記被搬送物の前記中心軸周りの回転の軌跡の最外周に沿う曲線である曲線部を有し前記中心軸と反対の側から前記被搬送物に当接又は近接して前記被搬送物の前記中心軸と反対の側への動きを規制し前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ案内する外側ガイド部と、を含み、前記被搬送物を該被搬送物の下面に接する部材に対して滑らせて前記被搬送物の方向を連続的に変化させつつ前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ移送可能である移送装置により上記目的を達成するものである。
【0009】
尚、前記第1搬送コンベアが前記被搬送物をその長手方向が前記第1搬送コンベアの搬送方向に平行であるように保持しつつ前記内側回転ガイド部による回転の開始位置まで搬送し、且つ、前記回転の開始位置の前記被搬送物に前記外側ガイド部の前記曲線部が当接又は近接するように前記曲線部が前記第1搬送コンベアで搬送される前記被搬送物の搬送想定領域よりも前記中心軸から離れる側に凹んでいてもよい。
【0010】
又、前記内側回転ガイド部は前記被搬送物の長手方向の前側の部分に対向する前側対向部と前記被搬送物の長手方向の後側の部分に対向する後側対向部とを有し、前記回転の開始位置まで前記前側対向部により前記被搬送物を前記第1搬送コンベアの搬送方向に案内し、前記被搬送物を回転駆動する時に前記前側対向部が前記被搬送物から離れると共に前記後側対向部が前記被搬送物に当接又は近接して前記被搬送物の前記中心軸の側への動きを規制するように前記前側対向部と前記後側対向部とを平面視において異なる角度で形成してもよい。
【0011】
この場合、前記内側回転ガイド部は前記後側対向部から突出し前記被搬送物の長手方向の前記先頭部と反対側の尾部に当接して前記被搬送物を付勢する突起部を更に有していてもよい。
【0012】
又、前記外側ガイド部の前記曲線部は前記内側回転ガイド部による回転の終了位置の前記被搬送物の前記先頭部が前記第2搬送コンベアで搬送される前記被搬送物の搬送想定領域に位置するように前記外側ガイド部の前記曲線部が前記第2搬送コンベアで搬送される前記被搬送物の搬送想定領域又はこれを前記第2搬送コンベアの搬送方向に延長した領域よりも前記中心軸から離れる側に凹んでいてもよい。
【0013】
又、前記外側ガイド部は平面視における形状が前記曲線部に接する直線であり、且つ、前記曲線部から前記第2搬送コンベアへ前記被搬送物を案内する直線部を更に備えていてもよい。
【0014】
又、前記中心軸は前記第1搬送コンベアからの距離と前記第2搬送コンベアからの距離とが等しい位置に設置されていてもよい。
【0015】
又、本発明は、上記のいずれかに記載の移送装置と、前記第1搬送コンベアと、前記第2搬送コンベアと、を備える搬送システムにより上記目的を達成するものである。
【0016】
尚、前記第1搬送コンベアは、前記第1搬送コンベアから前記第2搬送コンベアへ前記被搬送物が移送される位置よりも前記第1搬送コンベアの搬送方向の下流側まで延在され、前記外側ガイド部の前記曲線部の少なくとも一部は、前記中心軸と反対の側から前記被搬送物に当接又は近接して前記被搬送物の前記中心軸と反対の側への動きを規制し前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ案内するための移送用位置と前記第1搬送コンベアで搬送される前記被搬送物の搬送想定領域に干渉しない待機位置との間で移動可能であり、前記外側ガイド部の前記曲線部の少なくとも一部が前記移送用位置に配置されることにより前記第1搬送コンベアから前記第2搬送コンベアへ前記被搬送物を移送可能であり、前記外側ガイド部の前記曲線部の少なくとも一部が前記待機位置に配置されることにより前記第1搬送コンベアから前記第2搬送コンベアへ前記被搬送物が移送される位置よりも前記第1搬送コンベアの搬送方向の下流側へ前記被搬送物を移送可能であるようにしてもよい。
【発明の効果】
【0017】
本発明によれば、構造が簡単でコンパクト化に寄与する移送装置及びこれを備えたコンパクトな搬送システムを実現できる。
【図面の簡単な説明】
【0018】
【図1】本発明の第1実施形態に係る搬送システムの構造を模式的に示す平面図
【図2】図1におけるIIから見た側面図
【図3】図1におけるIIIから見た側面図
【図4】同搬送システムの内側回転ガイド部及び外側ガイド部の下の部分の構造を示す平面図
【図5】被搬送物が回転の開始位置まで搬送された状態を模式的に示す平面図
【図6】前記内側回転ガイド部の後側対向部が同被搬送物に当接した状態を模式的に示す平面図
【図7】同被搬送物が前記外側ガイド部の曲線部に案内されて回転する状態を模式的に示す平面図
【図8】同被搬送物が回転の終了位置まで回転した状態を模式的に示す平面図
【図9】同被搬送物が前記外側ガイド部の直線部に案内されて第2搬送コンベアに移送される状態を模式的に示す平面図
【図10】同被搬送物が同第2搬送コンベアで搬送される状態を模式的に示す平面図
【図11】本発明の第2実施形態に係る搬送システムの構造を模式的に示す平面図
【図12】図11におけるXIIから見た側面図
【図13】図11におけるXIIIから見た側面図
【図14】同搬送システムの内側回転ガイド部及び外側ガイド部の下の部分の構造を示す平面図
【図15】本発明の第3実施形態に係る搬送システムの構造を模式的に示す平面図
【図16】同搬送システムにおいて被搬送物が第1搬送コンベアの下流側へ搬送される状態を模式的に示す平面図
【図17】本発明の第4実施形態に係る搬送システムの構造を模式的に示す平面図
【図18】同搬送システムにおいて被搬送物が第2搬送コンベアの下流側へ搬送される状態を模式的に示す平面図
【発明を実施するための形態】
【0019】
以下、本発明の実施形態について図面を参照して詳細に説明する。
【0020】
図1〜4に示されるように、本発明の第1実施形態に係る搬送システム10は、L字状の90°の屈曲部を有する搬送経路に沿って平面視の形状が細長い被搬送物12をその長手方向の一端が先頭部であるように案内して搬送するためのものであり屈曲部の上流側の第1搬送コンベア14と、下流側の第2搬送コンベア16と、第1搬送コンベア14から第2搬送コンベア16へ被搬送物12を移送するための移送装置18と、を備えている。
【0021】
移送装置18は、第1搬送コンベア14及び第2搬送コンベア16におけるこれらが小さい角をなす側の領域に位置する中心軸20の周りに回転して被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ回転駆動可能であり、且つ、中心軸20の側から被搬送物12に当接又は近接して被搬送物12の中心軸20の側への動きを規制する内側回転ガイド部22と、平面視の形状が被搬送物12の中心軸20の周りの回転の軌跡(図6〜8参照)の最外周に沿う円弧形の曲線である曲線部24を有し中心軸20と反対の側から被搬送物12に当接又は近接して被搬送物12の中心軸20と反対の側への動きを規制し被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ案内する外側ガイド部26と、を含み、被搬送物12を被搬送物12の下面に接する部材に対して滑らせて被搬送物12の方向を連続的に変化させつつ被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ移送可能である。
【0022】
中心軸20は第1搬送コンベア14からの距離と第2搬送コンベア16からの距離とが等しい位置に設置されている。中心軸20はモータ21に直接的又は間接的に接続されており、モータ21の駆動力で内側回転ガイド部22が回転するようになっている。
【0023】
外側ガイド部26の曲線部24は、第1搬送コンベア14が被搬送物12をその長手方向が第1搬送コンベア14の搬送方向に平行であるように保持しつつ内側回転ガイド部22による回転の開始位置SPまで搬送し、且つ、回転の開始位置SPの被搬送物12に外側ガイド部26の曲線部24が当接又は近接するよう、第1搬送コンベア14で搬送される被搬送物12の搬送想定領域よりも中心軸20から離れる側に凹んでいる(図5参照)。
【0024】
又、外側ガイド部26の曲線部24は、内側回転ガイド部22による回転の終了位置EPの被搬送物12の先頭部12Aが第2搬送コンベア16で搬送される被搬送物12の搬送想定領域に位置するように、第2搬送コンベア16で搬送される被搬送物12の搬送想定領域又はこれを第2搬送コンベア16の搬送方向に延長した領域よりも中心軸20から離れる側に凹んでいる(図8参照)。
【0025】
又、外側ガイド部26は、平面視における形状が曲線部24に接する直線であり、且つ、曲線部24から第2搬送コンベア16へ被搬送物12を案内する直線部28を備えている。
【0026】
尚、外側ガイド部26は、上側板部26Aと下側板部26Bとが柱部材等で連結された構成である。
【0027】
内側回転ガイド部22は、円板の一部を切り欠いたような形状であり、切り欠き部分に被搬送物12の長手方向の前側の部分に対向する前側対向部30と、被搬送物12の長手方向の後側の部分に対向する後側対向部32とを有している(図5、6参照)。回転の開始位置SPまで前側対向部30により被搬送物12を第1搬送コンベア14の搬送方向に案内し(図5参照)、被搬送物12を回転駆動する時に前側対向部30が被搬送物12から離れると共に後側対向部32が被搬送物12に当接又は近接して被搬送物12の中心軸20の側への動きを規制する(図6参照)ように前側対向部30と後側対向部32とは平面視において異なる角度で形成されている。
【0028】
又、内側回転ガイド部22は、後側対向部32から突出し被搬送物12の長手方向の先頭部12Aと反対側の尾部12Bに当接して被搬送物12を付勢する突起部34を更に有している。突起部34の突出長さは、内側回転ガイド部22が基準位置(前側対向部30が第1搬送コンベア14の搬送方向と平行になる位置)に保持された状態において、第1搬送コンベア14で搬送される被搬送物12の搬送想定領域に干渉しない範囲に制限されている。
【0029】
尚、内側回転ガイド部22は、上側板部22Aと下側板部22Bとが柱部材等で連結された構成である。又、下側板部22Bの外周には内側回転ガイド部22の回転位置を検出するための被検出材36が設置されている。
【0030】
被搬送物12は、複数の試験管38が列状に並んで収容される検体ラックである。
【0031】
第1搬送コンベア14は、回転の開始位置SPまで延在されたベルト部40を有している。又、第1搬送コンベア14は、被搬送物12をその長手方向と垂直な幅方向の両側から挟むように保持し被搬送物12を長手方向がベルト部40の方向と平行な方向であるように被搬送物12の姿勢を規制する外側ガイド部42及び内側ガイド部44を有している。外側ガイド部42は回転の開始位置SPの側の先端が外側ガイド部26に隣接するように設置されている。尚、内側ガイド部44は、回転の開始位置SPの側の先端が外側ガイド部42の回転の開始位置SPの側の先端よりも若干引き込んでいる。
【0032】
第2搬送コンベア16は、回転の終了位置EPの近傍まで延在されたベルト部46を有している。又、第2搬送コンベア16は、被搬送物12をその長手方向と垂直な幅方向の両側から挟むように保持し被搬送物12を長手方向がベルト部46の方向と平行な方向であるように被搬送物12の姿勢を規制する外側ガイド部48及び内側ガイド部50を有している。外側ガイド部48は回転の終了位置EPの側の先端が外側ガイド部26に隣接するように設置されている。一方、内側ガイド部50は、回転の終了位置EPの側の先端が外側ガイド部48の回転の終了位置EPの側の先端よりも突出して外側ガイド部26の直線部28と対向するように内側回転ガイド部22の上まで延在されており、外側ガイド部26の直線部28と共に回転の終了位置EPから第2搬送コンベア16へ被搬送物12を案内するようになっている。
【0033】
内側回転ガイド部22及び外側ガイド部26の下には、第1搬送コンベア14と第2搬送コンベア16との間で被搬送物12を下方から支持するための主固定床面部52が第1搬送コンベア14と第2搬送コンベア16との間の隙間を埋めるように設置されている。主固定床面部52は、回転の終了位置EPにおいて被搬送物12を下方から支持可能であるように、第2搬送コンベア16で搬送される被搬送物12の搬送想定領域を第2搬送コンベア16の搬送方向に延長した領域よりも中心軸20から離れる側の領域まで延在されている。尚、主固定床面部52には、内側回転ガイド部22に設置された被検出材36の有無を検知するためのピックアップ53が設置されている。ピックアップ53が被検出材36を検出することにより、内側回転ガイド部22が基準位置(前側対向部30が第1搬送コンベア14の搬送方向と平行になる位置)に位置することを検知できるようになっている。
【0034】
又、回転の開始位置SPにおいて被搬送物12を下方から支持可能であるように、第1搬送コンベア14で搬送される被搬送物12の搬送想定領域よりも中心軸20から離れる側の領域には、副固定床面部54が設置されている。尚、副固定床面部54、主固定床面部52、第1搬送コンベア14のベルト部40、第2搬送コンベア16のベルト部46が、前述の被搬送物12の下面に接する部材に相当する。
【0035】
次に、搬送システム10の作用について説明する。
【0036】
まず、図5に示されるように、基準位置(前側対向部30が第1搬送コンベア14の搬送方向に平行である回転位置)に内側回転ガイド部22を保持し、この状態で第1搬送コンベア14が被搬送物12をその長手方向が第1搬送コンベア14の搬送方向に平行であるように保持しつつ内側回転ガイド部22による回転の開始位置SPまで搬送する。
【0037】
次に、図6に示されるように内側回転ガイド部22が回転し始めると前側対向部30が被搬送物12から離れると共に突起部34が被搬送物12の尾部12Bに当接して被搬送物12の回転駆動を開始する。又、後側対向部32が被搬送物12に当接又は近接して被搬送物12の中心軸20の側への動きを規制する。
【0038】
図7に示されるように内側回転ガイド部22が更に回転すると、被搬送物12は内側回転ガイド部22の後側対向部32により中心軸20の側への動きが規制されつつ外側ガイド部26の曲線部24に案内されて中心軸20の周りに回転する。尚、この際、被搬送物12は、第1搬送コンベア14のベルト部40、副固定床面部54及び主固定床面部52の上を滑りながら方向(姿勢)が連続的に変化する。
【0039】
図8に示されるように、被搬送物12が回転の終了位置EPまで回転すると、その後、被搬送物12は外側ガイド部26の直線部28に案内されて先頭部12Aが第2搬送コンベア16のベルト部46の上に載置される。
【0040】
図9に示されるように内側回転ガイド部22が更に回転すると、被搬送物12は内側回転ガイド部22の突起部34により尾部12Bの側から押されると共に第2搬送コンベア16のベルト部46により先頭部12Aの側に引かれて第2搬送コンベア16のベルト部46の上に載置される。この際、被搬送物12は外側ガイド部26の直線部28及び第2搬送コンベア16の内側ガイド部50に案内されて、主固定床面部52及びベルト部46の上を滑りながら、図10に示されるように長手方向が第2搬送コンベア16の搬送方向(ベルト部46の搬送方向)に平行である姿勢に矯正されて第2搬送コンベア16の上に載置される。これにより第1搬送コンベア14から第2搬送コンベア16への被搬送物12の移送が完了する。尚、被搬送物12は、その後第2搬送コンベア16により所定の目的位置へ搬送される。
【0041】
一方、内側回転ガイド部22は更に回転して基準位置へ戻り、上記と同様の要領で次の被搬送物12の第1搬送コンベア14から第2搬送コンベア16への移送が行われる。
【0042】
このように移送装置18は、駆動部分が内側回転ガイド部22のみであるが、被搬送物12を副固定床面部54、主固定床面部52、第1搬送コンベア14のベルト部40、第2搬送コンベア16のベルト部46(被搬送物12の下面に接する部材)に対して滑らせて被搬送物12の方向を連続的に変化させつつ被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ移送することができる。
【0043】
この移送装置18は、駆動部分が内側回転ガイド部22のみであるので構造が簡単でコンパクトであり、搬送システムのコンパクト化に寄与する。特に、下方への突出を抑制でき搬送システムの上下方向のコンパクト化に寄与する。従って、例えば搬送システムを病院等の天井に設置する場合等に好適である。
【0044】
又、内側回転ガイド部22の中心軸20は、第1搬送コンベア14及び第2搬送コンベア16におけるこれらが小さい角をなす側の領域に位置するので、移送装置18は、第1搬送コンベア14及び第2搬送コンベア16が大きい角をなす側への突出も抑制されており、搬送システムの水平方向のコンパクト化にも寄与する。
【0045】
又、移送装置18は、被搬送物12を被搬送物12の下面に接する部材に対して滑らせて被搬送物12の方向を連続的に変化させつつ被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ移送するので、第1搬送コンベアで搬送されてきた被搬送物を移送装置のターンテーブルに搬入し、次にターンテーブルを90°回転させて被搬送物の向きを第2搬送コンベアの搬送方向に一致させ、更にターンテーブルから第2搬送コンベアに被搬送物を搬出する従来の移送装置よりも短時間で移送を完了することができ、搬送効率の向上にも寄与する。尚、第1搬送コンベア14から移送装置18への被搬送物12の搬入や、移送装置18から第2搬送コンベア16への被搬送物12の搬出の際も、被搬送物12を静止させる必要はない。
【0046】
次に、本発明の第2実施形態について説明する。前記第1実施形態に係る搬送システム10はL字状の90°の屈曲部を有する搬送経路に沿って被搬送物12を搬送するためのものであるのに対し、図11〜14に示されるように、本第2実施形態に係る搬送システム60は、U字型の180°の屈曲部を有する搬送経路に沿って被搬送物12を搬送するためのものであり、第1搬送コンベア14の搬送方向と第2搬送コンベア16の搬送方向とが180°異なっている。尚、このように第1搬送コンベア14の搬送方向と第2搬送コンベア16の搬送方向とが180°異なっている場合、第1搬送コンベア14及び第2搬送コンベア16で挟まれる領域を、第1搬送コンベア14及び第2搬送コンベア16におけるこれらが小さい角をなす側の領域と定義する。
【0047】
搬送システム60の移送装置62は、前記第1実施形態に係る移送装置18の外側ガイド部26に代えて、外側ガイド部26の曲線部24よりも被搬送物12を案内する角度が90°大きい円弧形の曲線部64を有する外側ガイド部66を備えている。尚、外側ガイド部66は、上側板部66Aと下側板部66Bとが柱部材等で連結された構成である。
【0048】
又、移送装置62は、前記第1実施形態に係る主固定床面部52に代えて、外側ガイド部26の曲線部24よりも被搬送物12を案内する角度が90°大きい曲線部64を有する外側ガイド部66に対応する主固定床面部68を備えている。
【0049】
他の構成については、前記第1実施形態と同様であるので同様の構成については前記図1〜10と同一の符号を付することとして説明を省略する。
【0050】
本第2実施形態に係る移送装置62も、前記第1実施に係る移送装置18と同様に、搬送システムのコンパクト化、及び搬送効率の向上に寄与する。
【0051】
次に、本発明の第3実施形態について説明する。前記第1及び第2実施形態に係る搬送システム10(60)は、外側ガイド部26(66)が固定されており、第1搬送コンベア14で搬送される総ての被搬送物12が第2搬送コンベア16に移送されるようになっている。これに対し、図15及び16に示されるように、本第3実施形態に係る搬送システム70は、第1搬送コンベア72が、第1搬送コンベア72から第2搬送コンベア16へ被搬送物12が移送される位置よりも第1搬送コンベア72の搬送方向の下流側まで延在されており、被搬送物12を第1搬送コンベア72の搬送方向の下流側又は第2搬送コンベア16に分配できるようになっている。
【0052】
又、外側ガイド部26は、曲線部24が第1曲線部24Aと第2曲線部24Bと第3曲線部24Cとに分割されている。第1曲線部24Aと第2曲線部24Bと第3曲線部24Cとはこの順で上流側から下流側に並んでいる。第2曲線部24Bは、図示しない駆動装置により、中心軸20と反対の側から被搬送物12に当接又は近接して被搬送物12の中心軸20と反対の側への動きを規制し被搬送物12を第1搬送コンベア72から第2搬送コンベア16へ案内するための移送用位置TP1と、第1搬送コンベア72で搬送される被搬送物12の搬送想定領域に干渉しない待機位置WP1と、の間で移動可能である。尚、第1曲線部24Aは、第1搬送コンベア72で搬送される被搬送物12の搬送想定領域に干渉しないように固定されている。又、第3曲線部24Cは、直線部28と一体で設けられており直線部28と共に固定されている。
【0053】
又、外側ガイド部26は、第1曲線部24Aの上面に沿って移動可能である可動直線ガイド部27を備えている。可動直線ガイド部27は、第1曲線部24Aの凹部を上方から覆うように配置されて被搬送物12を第1搬送コンベア14の搬送方向に案内するための移送用位置TP2と、第1曲線部24Aに案内されつつ回転する被搬送物12の回転移送領域に干渉しない待機位置WP2との間で移動可能である。
【0054】
他の構成については、前記第1実施形態と同様であるので同様の構成については前記図1〜10と同一の符号を付することとして説明を省略する。
【0055】
図15に示されるように、第2曲線部24Bが移送用位置TP1に配置されることにより、前記第1実施形態と同様に第1搬送コンベア72から第2搬送コンベア16へ被搬送物12を移送可能である。尚、この場合、可動直線ガイド部27は待機位置WP2に保持しておく。
【0056】
一方、図16に示されるように、第2曲線部24Bが待機位置WP1に配置されることにより、第1搬送コンベア72から第2搬送コンベア16へ被搬送物12が移送される位置よりも第1搬送コンベア72の搬送方向の下流側へ被搬送物12を移送可能である。尚、この場合、可動直線ガイド部27は移送用位置TP2に保持しておく。又、内側回転ガイド部22は基準位置(前側対向部30が第1搬送コンベア72の搬送方向に平行である回転位置)に保持しておく。
【0057】
このように本第3実施形態に係る搬送システム70によれば、被搬送物12を2つの異なる経路に分配して搬送することができる。尚、図15及び16では、第2曲線部24Bの待機位置WP1は移送用位置TP1に対して水平方向にずれているように図示されているが、待機位置WP1は移送用位置TP1に対して上下方向にずれていてもよい。又、待機位置WP1は移送用位置TP1に対して水平方向及び上下方向にずれていてもよい。又、図15及び16では、第2曲線部24Bは待機位置WP1に配置されている時の姿勢が移送用位置TP1に配置されている時の姿勢に対して平面視において回転するようになっているが、第2曲線部24Bは平面視において回転することなく待機位置WP1と移送用位置TP1との間で平行移動するようにしてもよい。可動直線ガイド部27の移送用位置TP2と待機位置WP2との間の移動についても同様である。
【0058】
又、図15及び16では、曲線部24のうちの第2曲線部24Bだけが待機位置WP1と移送用位置TP1との間で移動するようになっているが、第1曲線部24Aと第2曲線部24Bとが一体で待機位置と移送用位置との間で移動するようにしてもよい。この場合、第1曲線部24Aと第2曲線部24Bとは分割されていない一体の構造としてもよい。又、曲線部24全体が待機位置と移送用位置との間で移動するようにしてもよい。この場合、曲線部24は第1曲線部24Aと第2曲線部24Bと第3曲線部24Cとに分割されていない一体の構造としてもよい。又、外側ガイド部26全体が待機位置と移送用位置との間で移動するようにしてもよい。この場合、外側ガイド部26は曲線部24と直線部28とに分割されていない一体の構造としてもよい。
【0059】
次に、本発明の第4実施形態について説明する。図17及び18に示されるように、本第4実施形態に係る搬送システム80は、前記第3実施形態に対し、第2搬送コンベア16の下流側に更に第3搬送コンベア82が備えられ、第2搬送コンベア16から第3搬送コンベア82へ被搬送物12を移送可能である。第3搬送コンベア82は、搬送方向が第2搬送コンベア16の搬送方向に対し90°異なり、第1搬送コンベア72に対し180°異なる。尚、第2搬送コンベア16は、第2搬送コンベア16から第3搬送コンベア82へ被搬送物12が移送される位置よりも第2搬送コンベア16の搬送方向の下流側まで延在されており、この第2搬送コンベア16の下流側の部分へも被搬送物12を搬送可能である。搬送システム80は、被搬送物12を第1搬送コンベア72の下流側、第2搬送コンベア16の下流側又は第3搬送コンベア82に分配できるようになっている。
【0060】
搬送システム80は、前記第2実施形態に係る移送装置62と鏡面対称のような構成の移送装置84を備えている。移送装置84の外側ガイド部88は、曲線部86と、第1直線部90Aと、第2直線部90Bと、可動直線ガイド部27と、を備えている。曲線部86は、第1曲線部86Aと第2曲線部86Bと第3曲線部86Cと第4曲線部86Dと第5曲線部86Eとに分割されている。第1曲線部86Aと第2曲線部86Bと第3曲線部86Cと第4曲線部86Dと第5曲線部86Eとはこの順で上流側から下流側に並んでいる。
【0061】
第1曲線部86Aは、前記第3実施形態に係る第1曲線部24Aと同様の構成であり、第1搬送コンベア72で搬送される被搬送物12の搬送想定領域に干渉しないように固定されている。第2曲線部86Bは、前記第3実施形態に係る第2曲線部24Bと同様の構成であり、図示しない駆動装置により、中心軸20と反対の側から被搬送物12に当接又は近接して被搬送物12の中心軸20と反対の側への動きを規制し被搬送物12を第1搬送コンベア72から第2搬送コンベア16へ案内するための移送用位置TP1と第1搬送コンベア72で搬送される被搬送物12の搬送想定領域に干渉しない待機位置WP1との間で移動可能である。第3曲線部86Cは、第1直線部90Aと一体で設けられており第1直線部90Aと共に固定されている。第4曲線部86Dは第1直線部90Aの上面に沿って配置されている。第4曲線部86Dは、図示しない駆動装置により、中心軸20と反対の側から被搬送物12に当接又は近接して被搬送物12の中心軸20と反対の側への動きを規制し被搬送物12を第2搬送コンベア16から第3搬送コンベア82へ案内するための移送用位置TP3と第2搬送コンベア16で搬送される被搬送物12の搬送想定領域に干渉しない待機位置WP3との間で移動可能である。又、第5曲線部86Eは、第2直線部90Bと一体で設けられており第2直線部90Bと共に固定されている。
【0062】
第1直線部90Aは、第3曲線部86Cに接し、第3曲線部86Cから第2搬送コンベア16へ被搬送物12を案内するように配置されている。第2直線部90Bは、第5曲線部86Eに接し、第5曲線部86Eから第3搬送コンベア82へ被搬送物12を案内するように配置されている。
【0063】
又、第2搬送コンベア16の内側ガイド部50は先端部50Aと基部50Bとが別体の構造であり、先端部50Aは、第5曲線部86Eの上面に沿って配置されている。先端部50Aは、図示しない駆動装置により、第2搬送コンベア16から第3搬送コンベア82への被搬送物12の移送を規制して被搬送物12を第2搬送コンベア16へ案内する移送用位置TP4と、第2搬送コンベア16から第3搬送コンベア82への被搬送物12の移送想定領域に干渉しない待機位置WP4との間で移動可能である。
【0064】
他の構成については、前記第1〜第3実施形態と同様であるので同様の構成については前記図1〜16と同一の符号を付することとして説明を省略する。
【0065】
搬送システム80の作用について説明する。尚、第1搬送コンベア72から第2搬送コンベア16又は第1搬送コンベア72の搬送方向の下流側へのいずれかへ被搬送物12を分配する作用については、前記第3実施形態と同様であるので説明を省略する。
【0066】
図17に示されるように、第2曲線部86Bが移送用位置TP1に配置され、第4曲線部86Dが移送用位置TP3に配置されることにより、第1搬送コンベア72から第2搬送コンベア16を経由して第3搬送コンベア82へ被搬送物12を移送可能である。尚、この場合、可動直線ガイド部27は待機位置WP2に保持しておく。又、第2搬送コンベア16の内側ガイド部50の先端部50Aは待機位置WP4に保持しておく。
【0067】
一方、図18に示されるように、第2曲線部86Bが移送用位置TP1に配置され、第4曲線部86Dが待機位置WP3に配置され、第2搬送コンベア16の内側ガイド部50の先端部50Aが移送用位置TP4位置に配置されることにより、第2搬送コンベア16から第3搬送コンベア82へ被搬送物12が移送される位置よりも第2搬送コンベア16の搬送方向の下流側へ被搬送物12を移送可能である。尚、この場合も、可動直線ガイド部27は待機位置WP2に保持しておく。
【0068】
このように搬送システム80によれば、被搬送物12を3つの異なる経路に分配して搬送することができる。
【0069】
尚、前記第1〜第4実施形態に係る搬送システム10、60、70、80はL字状の90°の屈曲部及び/又はU字状の180°の屈曲部を有する搬送経路に沿って被搬送物12を搬送するためのものであるが、本発明は90°や180°以外の角度の屈曲部を有する搬送経路に沿って被搬送物を搬送するための搬送システムにも適用可能である。この場合、上流側の搬送コンベア及び下流側の搬送コンベアがなす角(屈曲部の角)に対応する、適当な角度の曲線部を有する外側ガイド部を移送装置に備えればよい。
【0070】
又、前記第1〜第3実施形態において、外側ガイド部26(66)は、上側板部26A(66A)と下側板部26B(66B)とが柱部材等で連結された構成であるが、外側ガイド部は、1枚の板状部材からなる構成でもよいし、3枚以上の板状部材からなる構成としてもよい。前記第4実施形態の外側ガイド部88についても同様である。
【0071】
又、前記第1〜第4実施形態において、外側ガイド部26(66、88)の曲線部24(64、86)は平面視において円弧形であるが、被搬送物12の中心軸20周りの回転の軌跡の最外周に沿う曲線であれば、外側ガイド部の曲線部の平面視の形状は円弧形から若干外れた形状の曲線であってもよい。
【0072】
又、前記第1〜第4実施形態において、外側ガイド部26(66、88)は、曲線部24(64、86)から下流側の搬送コンベアへ被搬送物12を案内する直線部28(90A、90B)を備えているが、被搬送物12を上流側の搬送コンベアから下流側の搬送コンベアへ確実に移送できれば、外側ガイド部は直線部に代えて曲線部24(64、86)から下流側の搬送コンベアへ被搬送物12を案内する他の曲線部を備える構成としてもよい。又、被搬送物12を上流側の搬送コンベアから下流側の搬送コンベアへ確実に移送できれば、外側ガイド部は被搬送物12の中心軸20周りの回転の軌跡の最外周に沿う曲線部のみを備える構成としてもよい。
【0073】
又、前記第1〜第4実施形態において、外側ガイド部26(66、88)の曲線部24(64、86)は、第1搬送コンベア14(72)で搬送される被搬送物12の搬送想定領域や、第2搬送コンベア16で搬送される被搬送物12の搬送想定領域又はこれを第2搬送コンベア16の搬送方向に延長した領域よりも中心軸20から離れる側に凹んでいるが、被搬送物12を上流側の搬送コンベアから下流側の搬送コンベアへ確実に移送できれば、外側ガイド部の曲線部は、第1搬送コンベア14(72)で搬送される被搬送物12の搬送想定領域及び/又は第2搬送コンベア16で搬送される被搬送物12の搬送想定領域又はこれを第2搬送コンベア16の搬送方向に延長した領域よりも中心軸20から離れる側に凹んでいなくてもよい。
【0074】
又、前記第1〜第4実施形態において、内側回転ガイド部22の中心軸20は第1搬送コンベア14(72)からの距離と第2搬送コンベア16からの距離とが等しい位置に設置されているが、被搬送物12を上流側の搬送コンベアから下流側の搬送コンベアへ確実に移送できれば、内側回転ガイド部22の中心軸20は第1搬送コンベア14(72)からの距離と第2搬送コンベア16からの距離とが異なる位置に設置されていてもよい。
【0075】
又、前記第1〜第4実施形態において、内側回転ガイド部22は後側対向部32から突出し被搬送物12の尾部12Bに当接して被搬送物12を付勢する突起部34を有するが、被搬送物12を上流側の搬送コンベアから下流側の搬送コンベアへ確実に移送できれば、内側回転ガイド部は突起部を備えず、例えば後側対向部32において被搬送物12の側面に当接して被搬送物12を付勢する構成としてもよい。
【0076】
又、前記第1〜第4実施形態において、内側回転ガイド部22は前側対向部30と後側対向部32とが平面視において異なる角度で形成されているが、被搬送物12を上流側の搬送コンベアから下流側の搬送コンベアへ確実に移送できれば、前側対向部と後側対向部とが同じ角度で形成されていてもよい(前側、後側の区別がない対向部でもよい)。
【0077】
又、前記第1〜第4実施形態において、内側回転ガイド部22は、円板の一部を切り欠いたような平面視の形状であるが、被搬送物12に当接又は近接する部分以外の形状は特に限定されない。
【0078】
又、前記第1〜第4実施形態において、内側回転ガイド部22は、上側板部22Aと下側板部22Bとが柱部材等で連結された構成であるが、内側固定ガイド部は、1枚の板状部材からなる構成でもよいし、3枚以上の板状部材からなる構成としてもよい。
【0079】
又、前記第1〜第4実施形態において、被搬送物12は複数の試験管38が列状に並んで収容される検体ラックであるが、平面視の形状が細長い被搬送物であれば検体ラック以外の被搬送物の搬送にも本発明は適用可能である。
【産業上の利用可能性】
【0080】
本発明は、屈曲部を有する所定の搬送経路に沿って、複数の試験管が列状に並んで収容される検体ラックのような平面視の形状が細長い被搬送物をその長手方向の一端が前端であるように案内して搬送するための搬送システムに利用することができる。
【符号の説明】
【0081】
10、60、70、80…搬送システム
12…被搬送物
12A…先頭部
12B…尾部
14、72…第1搬送コンベア
16…第2搬送コンベア
18、62、84…移送装置
20…中心軸
22…内側回転ガイド部
24、64、86…曲線部
26、66、88…外側ガイド部
28…直線部
30…前側対向部
32…後側対向部
34…突起部
82…第3搬送コンベア
90A…第1直線部
90B…第2直線部
SP…回転の開始位置
EP…回転の終了位置
TP1、TP2、TP3、TP4…移送用位置
WP1、WP2、WP3、WP4…待機位置
【特許請求の範囲】
【請求項1】
屈曲部を有する所定の搬送経路に沿って平面視の形状が細長い被搬送物をその長手方向の一端が先頭部であるように案内して搬送するための搬送システムにおける前記屈曲部の上流側の第1搬送コンベアから下流側の第2搬送コンベアへ前記被搬送物を移送するための移送装置であって、
前記第1搬送コンベア及び前記第2搬送コンベアにおけるこれらが小さい角をなす側の領域に位置する所定の中心軸の周りに回転して前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ回転駆動可能であり、且つ、前記中心軸の側から前記被搬送物に当接又は近接して前記被搬送物の前記中心軸の側への動きを規制する内側回転ガイド部と、
平面視の形状が前記被搬送物の前記中心軸周りの回転の軌跡の最外周に沿う曲線である曲線部を有し前記中心軸と反対の側から前記被搬送物に当接又は近接して前記被搬送物の前記中心軸と反対の側への動きを規制し前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ案内する外側ガイド部と、を含み、
前記被搬送物を該被搬送物の下面に接する部材に対して滑らせて前記被搬送物の方向を連続的に変化させつつ前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ移送可能であることを特徴とする移送装置。
【請求項2】
請求項1において、
前記第1搬送コンベアが前記被搬送物をその長手方向が前記第1搬送コンベアの搬送方向に平行であるように保持しつつ前記内側回転ガイド部による回転の開始位置まで搬送し、且つ、前記回転の開始位置の前記被搬送物に前記外側ガイド部の前記曲線部が当接又は近接するように前記曲線部が前記第1搬送コンベアで搬送される前記被搬送物の搬送想定領域よりも前記中心軸から離れる側に凹んでいることを特徴とする移送装置。
【請求項3】
請求項2において、
前記内側回転ガイド部は前記被搬送物の長手方向の前側の部分に対向する前側対向部と前記被搬送物の長手方向の後側の部分に対向する後側対向部とを有し、前記回転の開始位置まで前記前側対向部により前記被搬送物を前記第1搬送コンベアの搬送方向に案内し、前記被搬送物を回転駆動する時に前記前側対向部が前記被搬送物から離れると共に前記後側対向部が前記被搬送物に当接又は近接して前記被搬送物の前記中心軸の側への動きを規制するように前記前側対向部と前記後側対向部とが平面視において異なる角度で形成されていることを特徴とする移送装置。
【請求項4】
請求項3において、
前記内側回転ガイド部は前記後側対向部から突出し前記被搬送物の長手方向の前記先頭部と反対側の尾部に当接して前記被搬送物を付勢する突起部を更に有することを特徴とする移送装置。
【請求項5】
請求項1乃至4のいずれかにおいて、
前記外側ガイド部の前記曲線部は前記内側回転ガイド部による回転の終了位置の前記被搬送物の前記先頭部が前記第2搬送コンベアで搬送される前記被搬送物の搬送想定領域に位置するように前記外側ガイド部の前記曲線部が前記第2搬送コンベアで搬送される前記被搬送物の搬送想定領域又はこれを前記第2搬送コンベアの搬送方向に延長した領域よりも前記中心軸から離れる側に凹んでいることを特徴とする移送装置。
【請求項6】
請求項5において、
前記外側ガイド部は平面視における形状が前記曲線部に接する直線であり、且つ、前記曲線部から前記第2搬送コンベアへ前記被搬送物を案内する直線部を更に備えることを特徴とする移送装置。
【請求項7】
請求項1乃至6のいずれかにおいて、
前記中心軸は前記第1搬送コンベアからの距離と前記第2搬送コンベアからの距離とが等しい位置に設置されていることを特徴とする移送装置。
【請求項8】
請求項1乃至7のいずれかに記載の移送装置と、前記第1搬送コンベアと、前記第2搬送コンベアと、を備えることを特徴とする搬送システム。
【請求項9】
請求項8において、
前記第1搬送コンベアは、前記第1搬送コンベアから前記第2搬送コンベアへ前記被搬送物が移送される位置よりも前記第1搬送コンベアの搬送方向の下流側まで延在され、
前記外側ガイド部の前記曲線部の少なくとも一部は、前記中心軸と反対の側から前記被搬送物に当接又は近接して前記被搬送物の前記中心軸と反対の側への動きを規制し前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ案内するための移送用位置と前記第1搬送コンベアで搬送される前記被搬送物の搬送想定領域に干渉しない待機位置との間で移動可能であり、
前記外側ガイド部の前記曲線部の少なくとも一部が前記移送用位置に配置されることにより前記第1搬送コンベアから前記第2搬送コンベアへ前記被搬送物を移送可能であり、
前記外側ガイド部の前記曲線部の少なくとも一部が前記待機位置に配置されることにより前記第1搬送コンベアから前記第2搬送コンベアへ前記被搬送物が移送される位置よりも前記第1搬送コンベアの搬送方向の下流側へ前記被搬送物を移送可能であることを特徴とする搬送システム。
【請求項1】
屈曲部を有する所定の搬送経路に沿って平面視の形状が細長い被搬送物をその長手方向の一端が先頭部であるように案内して搬送するための搬送システムにおける前記屈曲部の上流側の第1搬送コンベアから下流側の第2搬送コンベアへ前記被搬送物を移送するための移送装置であって、
前記第1搬送コンベア及び前記第2搬送コンベアにおけるこれらが小さい角をなす側の領域に位置する所定の中心軸の周りに回転して前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ回転駆動可能であり、且つ、前記中心軸の側から前記被搬送物に当接又は近接して前記被搬送物の前記中心軸の側への動きを規制する内側回転ガイド部と、
平面視の形状が前記被搬送物の前記中心軸周りの回転の軌跡の最外周に沿う曲線である曲線部を有し前記中心軸と反対の側から前記被搬送物に当接又は近接して前記被搬送物の前記中心軸と反対の側への動きを規制し前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ案内する外側ガイド部と、を含み、
前記被搬送物を該被搬送物の下面に接する部材に対して滑らせて前記被搬送物の方向を連続的に変化させつつ前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ移送可能であることを特徴とする移送装置。
【請求項2】
請求項1において、
前記第1搬送コンベアが前記被搬送物をその長手方向が前記第1搬送コンベアの搬送方向に平行であるように保持しつつ前記内側回転ガイド部による回転の開始位置まで搬送し、且つ、前記回転の開始位置の前記被搬送物に前記外側ガイド部の前記曲線部が当接又は近接するように前記曲線部が前記第1搬送コンベアで搬送される前記被搬送物の搬送想定領域よりも前記中心軸から離れる側に凹んでいることを特徴とする移送装置。
【請求項3】
請求項2において、
前記内側回転ガイド部は前記被搬送物の長手方向の前側の部分に対向する前側対向部と前記被搬送物の長手方向の後側の部分に対向する後側対向部とを有し、前記回転の開始位置まで前記前側対向部により前記被搬送物を前記第1搬送コンベアの搬送方向に案内し、前記被搬送物を回転駆動する時に前記前側対向部が前記被搬送物から離れると共に前記後側対向部が前記被搬送物に当接又は近接して前記被搬送物の前記中心軸の側への動きを規制するように前記前側対向部と前記後側対向部とが平面視において異なる角度で形成されていることを特徴とする移送装置。
【請求項4】
請求項3において、
前記内側回転ガイド部は前記後側対向部から突出し前記被搬送物の長手方向の前記先頭部と反対側の尾部に当接して前記被搬送物を付勢する突起部を更に有することを特徴とする移送装置。
【請求項5】
請求項1乃至4のいずれかにおいて、
前記外側ガイド部の前記曲線部は前記内側回転ガイド部による回転の終了位置の前記被搬送物の前記先頭部が前記第2搬送コンベアで搬送される前記被搬送物の搬送想定領域に位置するように前記外側ガイド部の前記曲線部が前記第2搬送コンベアで搬送される前記被搬送物の搬送想定領域又はこれを前記第2搬送コンベアの搬送方向に延長した領域よりも前記中心軸から離れる側に凹んでいることを特徴とする移送装置。
【請求項6】
請求項5において、
前記外側ガイド部は平面視における形状が前記曲線部に接する直線であり、且つ、前記曲線部から前記第2搬送コンベアへ前記被搬送物を案内する直線部を更に備えることを特徴とする移送装置。
【請求項7】
請求項1乃至6のいずれかにおいて、
前記中心軸は前記第1搬送コンベアからの距離と前記第2搬送コンベアからの距離とが等しい位置に設置されていることを特徴とする移送装置。
【請求項8】
請求項1乃至7のいずれかに記載の移送装置と、前記第1搬送コンベアと、前記第2搬送コンベアと、を備えることを特徴とする搬送システム。
【請求項9】
請求項8において、
前記第1搬送コンベアは、前記第1搬送コンベアから前記第2搬送コンベアへ前記被搬送物が移送される位置よりも前記第1搬送コンベアの搬送方向の下流側まで延在され、
前記外側ガイド部の前記曲線部の少なくとも一部は、前記中心軸と反対の側から前記被搬送物に当接又は近接して前記被搬送物の前記中心軸と反対の側への動きを規制し前記被搬送物を前記第1搬送コンベアから前記第2搬送コンベアへ案内するための移送用位置と前記第1搬送コンベアで搬送される前記被搬送物の搬送想定領域に干渉しない待機位置との間で移動可能であり、
前記外側ガイド部の前記曲線部の少なくとも一部が前記移送用位置に配置されることにより前記第1搬送コンベアから前記第2搬送コンベアへ前記被搬送物を移送可能であり、
前記外側ガイド部の前記曲線部の少なくとも一部が前記待機位置に配置されることにより前記第1搬送コンベアから前記第2搬送コンベアへ前記被搬送物が移送される位置よりも前記第1搬送コンベアの搬送方向の下流側へ前記被搬送物を移送可能であることを特徴とする搬送システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2011−213470(P2011−213470A)
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願番号】特願2010−85536(P2010−85536)
【出願日】平成22年4月1日(2010.4.1)
【出願人】(592053778)株式会社日本設計工業 (18)
【Fターム(参考)】
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願日】平成22年4月1日(2010.4.1)
【出願人】(592053778)株式会社日本設計工業 (18)
【Fターム(参考)】
[ Back to top ]