
積層ゴムの検査装置及び積層ゴム

【課題】積層ゴムの水平変位量及び回転量を同時に測定する。
【解決手段】上部部材と下部部材に固定され、水平方向に変位される積層ゴム10の外周部に周方向へ複数設けられたマーキングを異なる角度から同時に撮像する複数の撮像手段34A,34Bと、前記撮像手段34A,34Bによって撮像された画像上の前記マーキングの座標を算出する座標算出手段と、異なる撮像手段34A,34Bによって同時に撮像された複数の画像上の前記マーキングの移動量から、積層ゴム10の水平変位量及び中心軸周りの回転量を演算する演算手段46と、を有する。
【解決手段】上部部材と下部部材に固定され、水平方向に変位される積層ゴム10の外周部に周方向へ複数設けられたマーキングを異なる角度から同時に撮像する複数の撮像手段34A,34Bと、前記撮像手段34A,34Bによって撮像された画像上の前記マーキングの座標を算出する座標算出手段と、異なる撮像手段34A,34Bによって同時に撮像された複数の画像上の前記マーキングの移動量から、積層ゴム10の水平変位量及び中心軸周りの回転量を演算する演算手段46と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、積層ゴムの検査装置及び積層ゴムに関する。
【背景技術】
【0002】
免震構造物では、構造物を支持する支承として、弾性体と剛性体とを互いに積層させた積層ゴムが用いられている。この積層ゴムの水平特性等を検査するため、せん断ひずみ試験が行われる。ここで用いられるせん断変位量の測定具の一例として、積層ゴムの上部及び下部の水平方向の変位量を2本の定規で測定する水平変位測定具が知られている(特許文献1)。一方で、マーキングが形成された積層ゴムに対して捩じり力を付与し、マーキングの移動量から積層ゴムの回転量を測定する測定方法が従来から知られている。
【0003】
しかしながら、上述した測定方法では、積層ゴムの水平変位量と回転量を同時に測定することができない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−115501号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は上記事実を考慮し、積層ゴムの水平変位量及び回転量を同時に測定することを課題とする。
【課題を解決するための手段】
【0006】
請求項1に記載の積層ゴムの検査装置は、上部部材と下部部材に固定され、水平方向に変位される積層ゴムの外周部に周方向へ複数設けられたマーキングを異なる角度から同時に撮像する複数の撮像手段と、前記撮像手段によって撮像された画像上の前記マーキングの座標を算出する座標算出手段と、異なる撮像手段によって同時に撮像された複数の画像上の前記マーキングの移動量から、積層ゴムの水平変位量及び中心軸周りの回転量を演算する演算手段と、を有する。
【0007】
請求項1に記載の積層ゴムの検査装置では、積層ゴムの外周面に設けられた複数のマーキングを異なる角度から複数の撮像手段によって撮像し、それぞれの撮像手段によって同時に撮像された画像上のマーキングの移動量を座標算出手段が座標から算出する。また、演算手段がマーキングの移動量を積層ゴムのX軸方向の中心座標XG、Y軸方向の中心座標YG、及び積層ゴムの中心軸周りの回転量θに置き換えて、積層ゴムの水平変位量及び中心軸周りの回転量とする。
【0008】
請求項2に記載の積層ゴムの検査装置は、積層ゴムの中心軸を座標の原点としてX軸上に一方の撮像手段を配置し、Y軸上に他方の撮像手段を配置し、マーキングをX軸上、Y軸上、及び両方の撮像手段から撮像される位置の少なくとも3箇所に設けている。
【0009】
請求項2に記載の積層ゴムの検査装置では、積層ゴムの中心軸を原点としてX軸方向及びY軸方向からマーキングを撮像するため、マーキングの移動量を容易に算出することができる。また、マーキングをX軸方向から0度及び90度の2箇所に設け、更に両方の撮像手段から撮像される例えば45度の位置に3箇所目のマーキングを設けることで、X軸方向にのみ水平力が付与されたときにはY軸上に配置した他方の撮像手段で撮像されたマーキングだけが移動し、逆に、Y軸方向にのみ水平力が付与されたときにはX軸上に配置した一方の撮像手段で撮像されたマーキングだけが移動するため、水平変位量を容易に算出することができる。
【0010】
さらに、捩じり変形が発生した際は、一方の撮像手段で撮像されたマーキングのうち、X軸方向から0度に設けたマーキングの移動量と45度に設けたマーキングの移動量、及び90度に設けられたマーキングの移動量の違いから積層ゴムの中心軸周りの回転量を算出することができる。
【0011】
請求項3に記載の積層ゴムの検査装置は、前記積層ゴムの外周部には、周方向に互いに近接した複数の前記マーキングによって構成されたマーキング群が設けられ、前記撮像手段によって撮像された画像上の複数の前記マーキングの座標から、積層ゴム上での前記マーキングの座標を演算する座標演算手段を更に備えている。
【0012】
請求項3に記載の積層ゴムの検査装置では、周方向に互いに近接した複数のマーキングによってマーキング群が構成されている。これにより、近接した複数のマーキング間の周方向の距離と画像上のマーキング間の距離から、画像上の長さの倍率を算出し、実際の積層ゴムの水平移動量及び中心軸周りの回転量を求めることができる。
【0013】
請求項4に記載の積層ゴムは、剛板と弾性体が交互に積層された積層弾性体と、前記積層弾性体の外周面を被覆する被覆部材と、前記被覆部材の表面に、周方向に近接した複数のマーキングをマーキング群として、前記マーキング群を同一高さでかつ周方向に所定の間隔で形成している。
【0014】
請求項4に記載の積層ゴムは、検査用のマーキング群が形成されているので、撮像することで積層ゴムの水平変位量及び中心軸周りの回転量を同時に測定することができる。
【0015】
請求項5に記載の積層ゴムは、請求項4に記載の積層ゴムであって、前記マーキングは、被覆部材をプレス成形することで形成された凹部又は凸部である。
【0016】
請求項5に記載の積層ゴムでは、プレス成形によって凹部又は凸部が形成された被覆部材を積層ゴムの外周壁に被覆させることで、容易にマーキングを形成することができる。また、インクのように、積層ゴムを長期間に亘って使用することによって見えなくなることもない。
【0017】
請求項6に記載の積層ゴムは、請求項4又は5に記載の積層ゴムであって、前記マーキング群は、前記積層弾性体の積層方向に複数設けられている。
【0018】
請求項6に記載の積層ゴムでは、積層ゴムを撮像することで、積層ゴムの各部位の変化量を視覚的に捉えることができる。
【発明の効果】
【0019】
本発明は、上記の構成とすることで、積層ゴムの水平変位量及び回転変位量を同時に測定できる。
【図面の簡単な説明】
【0020】
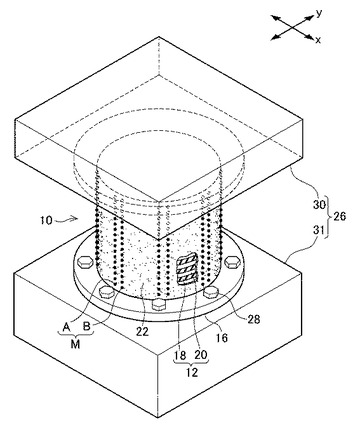
【図1】本発明の実施形態に係る積層ゴムが加振装置に装着された状態を示す一部破断斜視図である。
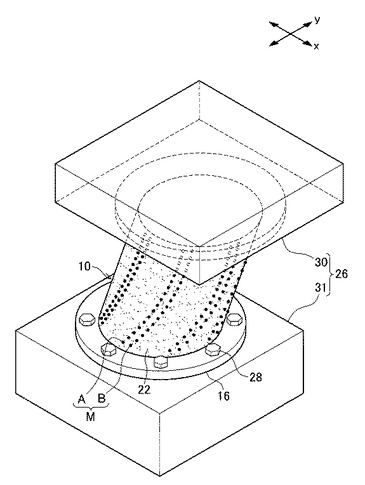
【図2】本発明の実施形態に係る積層ゴムへ水平方向に変位されている状態を示す斜視図である。
【図3】本発明の実施形態に係る検査装置の構成を示す概略ブロック図である。
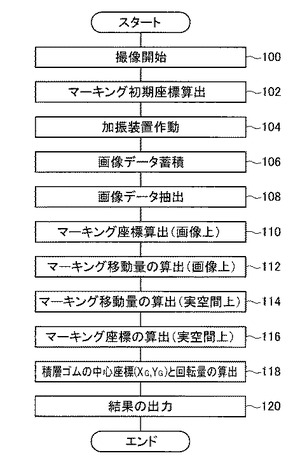
【図4】本発明の実施形態に係る検査装置による積層ゴムの水平変位量及び回転量を算出する手順を示したフローチャートである。
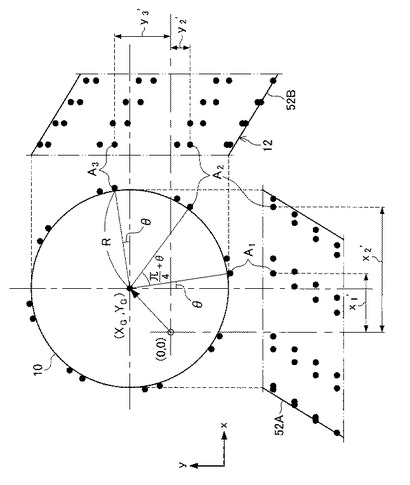
【図5】本発明の実施形態に係る積層ゴムの任意の高さの断面と、積層ゴムをX軸方向及びY軸方向から撮像したときの画像との関係を説明する説明図である。
【図6】変形時の積層ゴムの任意の高さの断面と、積層ゴムをX軸方向及びY軸方向から撮像したときの画像との関係を説明する説明図である。
【図7】本発明の実施形態に係る積層ゴムの任意の高さにおける原点からの移動状態を示す断面と、積層ゴムをX軸方向及びY軸方向から撮像したときの画像との関係を説明する説明図である。
【発明を実施するための形態】
【0021】
本発明の第1実施形態に係る積層ゴム10について説明する。図1に示すように、積層ゴム10は、上下方向に交互に積層された高減衰ゴム製で円形のゴム板18と円形の剛板20とが加硫接着されて形成された積層弾性体12を備えている。また、積層弾性体12の上端及び下端には、上フランジ14と下フランジ16が接着されており、上フランジ14を建物に固定し、下フランジ16を基礎部に固定することで建物を免震構造体とする。
【0022】
また、積層ゴム10の外周面は被覆ゴム22で被覆されている。被覆ゴム22は、ゴム板18及び剛板20に加硫接着されて一体となっている。
【0023】
被覆ゴム22の表面には、周方向に互いに近接した凸状のマーキングA及びBによって構成されたマーキング群Mが形成されている。マーキング群Mは、積層ゴム10の周方向に所定の間隔で複数形成されている。
【0024】
また、マーキング群Mは、積層ゴム10の積層方向に等間隔に複数設けられている。本実施形態では、積層ゴム10の周方向に45度の間隔でマーキング群Mが形成されている。
【0025】
なお、マーキングA、Bを形成する方法としては、被覆ゴム22をプレスして成形する方法や、被覆ゴム22の成形時に一体成形する方法などがある。また、マーキングA、Bを認識することができれば、インク等を用いて被覆ゴム22上に印刷して形成してもよい、さらに、被覆ゴム22上ではなく、ゴム板18及び剛板20上に直接マーキングを印刷して形成してもよい。
【0026】
また、本実施形態では、マーキング群Mは、積層ゴム10の周方向に45度の間隔で8つ設けられているが、更に多くのマーキング群Mを設けても良い。例えば、積層ゴム10の周方向に30度の間隔で12個のマーキング群Mを形成してもよい。ここで、積層ゴム10の中心軸を原点として積層方向と直交するX軸及びY軸を描いたときに、マーキングAやマーキングBがX軸上又はY軸上に設けられていれば、後述するマーキングの座標の算出が容易となる。
【0027】
図2に示すように、検査対象となる積層ゴム10は、建物から取外され、下フランジ16がボルト28で加振装置26の台座31に固定されている。また、積層ゴム10の上フランジ14は加振装置26の加振器30に取付けられている。加振器30は、積層ゴム10へ鉛直方向の荷重を付与すると共に、XY平面内を移動することで、積層ゴム10を水平方向に変位させ、積層ゴム10をせん断変形させる。また、被覆ゴム22上のマーキング群Mは、積層ゴム10に付与された水平方向のせん断力に伴って変位している。
【0028】
次に、本実施形態に係る積層ゴムの検査装置について説明する。図3に示すように、本実施形態に係る積層ゴムの検査装置32は、積層ゴム10を撮像する撮像手段としての2台のカメラ34A、34Bを備えている。カメラ34A及び34Bは、積層ゴム10の中心軸を原点としたX軸及びY軸上にレンズ中心が位置するように配置されている。
【0029】
また、本実施形態では2台のカメラ34A、34Bで積層ゴム10を撮像しているが、2台以上であれば設置するカメラの台数及び位置は特に制限しない。例えば、更に2台のカメラを配置して、4台のカメラで四方から積層ゴム10を撮像してもよい。この場合、X軸方向及びY軸方向の変位量をそれぞれ2台のカメラで撮像して算出できるので、算出精度を上げることができる。
【0030】
2台のカメラ34A、34Bは、制御装置36に接続されており、制御装置36の命令によって撮像を開始し又は停止する。また、制御装置36は、加振装置26にも接続されており、予め設定された加振条件で加振装置26の加振器30を作動させる。
【0031】
また、カメラ34A及びカメラ34Bは、回路基板38に接続されており、カメラ34A及びカメラ34Bで撮像された画像データは、回路基板38の画像データ格納部40へ格納される。回路基板38には、画像データ格納部40の他に、データ抽出部42、マーキング座標算出部44、演算部46、及び制御装置36へ接続された信号発生部48が設けられている。また、回路基板38にはモニタ50が接続されている。
【0032】
次に、検査装置32を用いて積層ゴム10の水平変位量及び回転量を測定する手順について図4のフローチャートに沿って説明する。
【0033】
図示しない測定開始ボタンが押されると、信号発生部48から制御装置36へ信号が送られる。制御装置36は、信号発生部48から信号を受信すると、加振装置26により積層ゴム10へ入力された荷重に応じてカメラ34A及びカメラ34Bへ同時に撮像開始の命令を行い加振する前の積層ゴム10を撮像する(ステップ100)。
【0034】
図4に示すように、撮像開始後、マーキングの初期座標を算出する(ステップ102)。具体的には、図5に示すように、カメラ34Aが積層ゴム10を撮像した画像52A、及びカメラ34Bが積層ゴム10を撮像した画像52Bから、剛板20の周方向に設けられたマーキングA1、A2、A3の座標を算出する。なお、以下の説明において、カメラ34Bの撮像方向をX軸方向、カメラ34Aの撮像方向をY軸方向として説明する。また、無変形状態での積層ゴム10の中心の座標をX=0、Y=0とする。
【0035】
ここで、画像52AのY軸上にマーキングA1があるので、マーキングA1のX座標X1は0となる。また、マーキングA1から反時計回りに45度(π/4)の位置にあるマーキングA2のX座標X2は、剛板20の半径Rを用いて、Rsin(π/4)と表される。
【0036】
同様にして、画像52BのX軸上にマーキングA3があるので、マーキングA3のY座標Y3は0となる。また、マーキングA2のY座標Y2は、−Rcos(π/4)となる。以上により、マーキングA1のX座標X1、マーキングA2のX座標X2、マーキングA3のY座標Y3、及びマーキングA2のY座標Y2の計4つの初期座標を算出した。
【0037】
なお、本実施形態では上記4つの初期座標を算出したが、更に他のマーキングAの座標を算出してもよい。ただし、同一高さに形成されたマーキングAに対して、画像52A及び画像52Bの各画像上で1つ以上の座標を算出すると共に、合計3つ以上の座標を算出する必要がある。
【0038】
図4に示すように、ステップ102でマーキングA1、A2、A3の初期座標が算出した後、加振器30を作動させる(ステップ104)。ここでは、図3に示すように、制御装置36から加振装置26へ信号を送り加振器30を作動させる。加振器30は予め設定された加振条件に基づいて、積層ゴム10を水平方向に変位させる。
【0039】
カメラ34A及びカメラ34Bは、せん断力が付与されている積層ゴム10を撮像し続ける。また、撮像された画像データは画像データ格納部40へ蓄積される。図4に示すように、ステップ108では、ステップ106で画像データ格納部40へ蓄積された画像データから、任意の画像データだけをデータ抽出部42へ抽出する(図3参照)。すなわち、せん断力の増減やせん断方向の変化に応じて、撮像された全ての画像データから数フレーム毎の画像データだけを抽出する。
【0040】
ステップ110では、抽出された画像データ上でマーキング26の座標を算出する。本実施形態では、図6に示すように、画像52A上でマーキングA1のX座標及びマーキングA2のX座標を算出し、画像52B上でマーキングA2のY座標及びマーキングA3のY座標を算出する。
【0041】
ここで、マーキングA1のX座標は積層ゴム10の初期位置の中心座標(0、0)からマーキングA1までの画像52A上の距離x1’となる。また、同様にしてマーキングA2のX座標は、中心座標(0、0)からマーキングA2までの画像52A上の距離x2’、マーキングA2のY座標は、中心座標(0、0)からマーキングA3までの画像52B上の距離y2’、マーキングA3のY座標は、画像52B上の距離y3’となる。
【0042】
次に、図4のステップ112では、画像上のマーキングA1、A2、A3の画像上での移動量を算出する。例えば、図5に示すように、画像52A上ではマーキングA1はY軸上にあったので、マーキングA1のX軸方向の移動量Δx1は、x1’となる(図6参照)。また、マーキングA2のX軸方向の移動量Δx2は、図5の画像52A上のA2の座標x2と、図6の画像52A上のA2の座標x2’から求めることができる。同様にして、Δy2、Δy3を算出する。
【0043】
ステップ114では、以下の方法によって実空間上のマーキング移動量を算出する。図7に示すように、マーキング群M2は、互いに近接するマーキングA2、B2によって構成されている。また、マーキングA2及びB2は、積層ゴム10の周方向に距離Lだけ離れて形成されている。
【0044】
ここで、画像52A上のマーキングA2、B2間の距離はlx2であり、画像52B上のマーキングA2、B2間の距離はly2である。また、マーキングA2及びB2のX軸方向の実際の距離をLx2と仮定する。
【0045】
次に、積層ゴム10の変形に伴ってマーキングA2が移動した移動量は、画像52A上ではΔx2であり、画像52B上ではΔy2である。また、マーキングA2の実際のX軸方向の移動量はΔX2、Y軸方向の移動量はΔY2であると仮定すると、lx2、Lx2、Δx2、及びΔX2の関係式は以下の(1)式で求められる。

・・・・・・・・・・(1)
ここで、Lx2は、距離L及びY軸に対するマーキングA2の角度π/4を用いて、
・・・・・・・・・・・・・(2)
と表されるので、ΔX2は(3)式で表される。
・・・・・・・・・・・・・(3)
【0046】
以上により、マーキングA2の実際のX軸方向の移動量ΔX2を、画像52A上の距離Δx2、lxで表すことができた。同様にしてマーキングA1の実際のX軸方向の移動量ΔX1、マーキングA2の実際のY軸方向の移動量ΔY2、及びマーキングA3の実際のY軸方向の移動量ΔY3は以下の(4)〜(6)式で表される。
・・・・・・・・・・・・・・・・(4)
・・・・・・・・・・・・・・(5)
・・・・・・・・・・・・・・・・(6)
【0047】
次に、図4のステップ116では、ステップ102で算出したマーキングの初期座標からステップ114で算出した実空間上のマーキング移動量を足して、実空間上でのマーキング座標を算出する。実空間上でのマーキングA1のX座標をX1’、マーキングA2のX座標をX2’、Y座標をY2’、マーキングA3のY座標をY3’とすると実空間上でのマーキング座標は以下の(7)〜(10)式で表される。
・・・・・・・・・・・・(7)
・・・・・(8)
・・・・・(9)
・・・・・・・・・・・・・(10)
【0048】
次に、ステップ118では、ステップ116で求めた実空間上でのマーキング座標から積層ゴム10の中心座標XG、YG、及び回転量θを演算する(図6参照)。まず、マーキングA1、A2,及びA3の座標は、XG、YG、及びθを用いて以下の(11)〜(14)式で表される。
・・・・・・・・・・・・・・・・(11)
・・・・・・・・・・・・・(12)
・・・・・・・・・・・・・・(13)
・・・・・・・・・・・・・・・・(14)
【0049】
上記(11)〜(14)式から、XG、YG、θを求めると、以下の(15)〜(17)式となる。なお、本実施形態では、回転量θが微小であることを前提として計算している。
・・・・・・・・・・・・・・(15)
・・・・・・・・・・・・・・・(16)
・・・・・・・・・・・・・(17)
【0050】
上記(15)〜(17)式に対して(7)〜(10)式のX1’、X2’、Y2’、及びY3’を代入することで、積層ゴム10の実際の水平変位量及び回転量を求めることができる。また、積層ゴム10の積層方向に設けられたマーキングA、Bについても同様に演算することで、任意の高さに応じた積層ゴム10の中心軸周りの回転量が求められる(図1参照)。
【0051】
図4に示すように、ステップ120で積層ゴム10の水平変位量及び中心軸周りの回転量が演算後、モニタ50へ演算結果が出力される(図3参照)。モニタ50には、例えば、積層ゴム10の変形状態を再現した3次元像や、せん断力とせん断ひずみ量との関係を示す荷重変位曲線図などが表示される。
【0052】
以上、本発明の実施形態について説明したが、本発明はこうした実施形態に限定されるものでなく、本発明の要旨を逸脱しない範囲において、種々なる態様で実施し得ることは勿論である。例えば、複数の鏡やプリズム等を積層ゴム10の周囲に配置して、マーキング26を同時に撮像する構成であってもよい。
【符号の説明】
【0053】
10 積層ゴム
18 ゴム板
20 剛板
32 検査装置
34A カメラ(撮像手段)
34B カメラ(撮像手段)
44 マーキング座標算出部(座標算出手段)
46 演算部(演算手段)
A マーキング
B マーキング
M マーキング群
【技術分野】
【0001】
本発明は、積層ゴムの検査装置及び積層ゴムに関する。
【背景技術】
【0002】
免震構造物では、構造物を支持する支承として、弾性体と剛性体とを互いに積層させた積層ゴムが用いられている。この積層ゴムの水平特性等を検査するため、せん断ひずみ試験が行われる。ここで用いられるせん断変位量の測定具の一例として、積層ゴムの上部及び下部の水平方向の変位量を2本の定規で測定する水平変位測定具が知られている(特許文献1)。一方で、マーキングが形成された積層ゴムに対して捩じり力を付与し、マーキングの移動量から積層ゴムの回転量を測定する測定方法が従来から知られている。
【0003】
しかしながら、上述した測定方法では、積層ゴムの水平変位量と回転量を同時に測定することができない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−115501号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は上記事実を考慮し、積層ゴムの水平変位量及び回転量を同時に測定することを課題とする。
【課題を解決するための手段】
【0006】
請求項1に記載の積層ゴムの検査装置は、上部部材と下部部材に固定され、水平方向に変位される積層ゴムの外周部に周方向へ複数設けられたマーキングを異なる角度から同時に撮像する複数の撮像手段と、前記撮像手段によって撮像された画像上の前記マーキングの座標を算出する座標算出手段と、異なる撮像手段によって同時に撮像された複数の画像上の前記マーキングの移動量から、積層ゴムの水平変位量及び中心軸周りの回転量を演算する演算手段と、を有する。
【0007】
請求項1に記載の積層ゴムの検査装置では、積層ゴムの外周面に設けられた複数のマーキングを異なる角度から複数の撮像手段によって撮像し、それぞれの撮像手段によって同時に撮像された画像上のマーキングの移動量を座標算出手段が座標から算出する。また、演算手段がマーキングの移動量を積層ゴムのX軸方向の中心座標XG、Y軸方向の中心座標YG、及び積層ゴムの中心軸周りの回転量θに置き換えて、積層ゴムの水平変位量及び中心軸周りの回転量とする。
【0008】
請求項2に記載の積層ゴムの検査装置は、積層ゴムの中心軸を座標の原点としてX軸上に一方の撮像手段を配置し、Y軸上に他方の撮像手段を配置し、マーキングをX軸上、Y軸上、及び両方の撮像手段から撮像される位置の少なくとも3箇所に設けている。
【0009】
請求項2に記載の積層ゴムの検査装置では、積層ゴムの中心軸を原点としてX軸方向及びY軸方向からマーキングを撮像するため、マーキングの移動量を容易に算出することができる。また、マーキングをX軸方向から0度及び90度の2箇所に設け、更に両方の撮像手段から撮像される例えば45度の位置に3箇所目のマーキングを設けることで、X軸方向にのみ水平力が付与されたときにはY軸上に配置した他方の撮像手段で撮像されたマーキングだけが移動し、逆に、Y軸方向にのみ水平力が付与されたときにはX軸上に配置した一方の撮像手段で撮像されたマーキングだけが移動するため、水平変位量を容易に算出することができる。
【0010】
さらに、捩じり変形が発生した際は、一方の撮像手段で撮像されたマーキングのうち、X軸方向から0度に設けたマーキングの移動量と45度に設けたマーキングの移動量、及び90度に設けられたマーキングの移動量の違いから積層ゴムの中心軸周りの回転量を算出することができる。
【0011】
請求項3に記載の積層ゴムの検査装置は、前記積層ゴムの外周部には、周方向に互いに近接した複数の前記マーキングによって構成されたマーキング群が設けられ、前記撮像手段によって撮像された画像上の複数の前記マーキングの座標から、積層ゴム上での前記マーキングの座標を演算する座標演算手段を更に備えている。
【0012】
請求項3に記載の積層ゴムの検査装置では、周方向に互いに近接した複数のマーキングによってマーキング群が構成されている。これにより、近接した複数のマーキング間の周方向の距離と画像上のマーキング間の距離から、画像上の長さの倍率を算出し、実際の積層ゴムの水平移動量及び中心軸周りの回転量を求めることができる。
【0013】
請求項4に記載の積層ゴムは、剛板と弾性体が交互に積層された積層弾性体と、前記積層弾性体の外周面を被覆する被覆部材と、前記被覆部材の表面に、周方向に近接した複数のマーキングをマーキング群として、前記マーキング群を同一高さでかつ周方向に所定の間隔で形成している。
【0014】
請求項4に記載の積層ゴムは、検査用のマーキング群が形成されているので、撮像することで積層ゴムの水平変位量及び中心軸周りの回転量を同時に測定することができる。
【0015】
請求項5に記載の積層ゴムは、請求項4に記載の積層ゴムであって、前記マーキングは、被覆部材をプレス成形することで形成された凹部又は凸部である。
【0016】
請求項5に記載の積層ゴムでは、プレス成形によって凹部又は凸部が形成された被覆部材を積層ゴムの外周壁に被覆させることで、容易にマーキングを形成することができる。また、インクのように、積層ゴムを長期間に亘って使用することによって見えなくなることもない。
【0017】
請求項6に記載の積層ゴムは、請求項4又は5に記載の積層ゴムであって、前記マーキング群は、前記積層弾性体の積層方向に複数設けられている。
【0018】
請求項6に記載の積層ゴムでは、積層ゴムを撮像することで、積層ゴムの各部位の変化量を視覚的に捉えることができる。
【発明の効果】
【0019】
本発明は、上記の構成とすることで、積層ゴムの水平変位量及び回転変位量を同時に測定できる。
【図面の簡単な説明】
【0020】
【図1】本発明の実施形態に係る積層ゴムが加振装置に装着された状態を示す一部破断斜視図である。
【図2】本発明の実施形態に係る積層ゴムへ水平方向に変位されている状態を示す斜視図である。
【図3】本発明の実施形態に係る検査装置の構成を示す概略ブロック図である。
【図4】本発明の実施形態に係る検査装置による積層ゴムの水平変位量及び回転量を算出する手順を示したフローチャートである。
【図5】本発明の実施形態に係る積層ゴムの任意の高さの断面と、積層ゴムをX軸方向及びY軸方向から撮像したときの画像との関係を説明する説明図である。
【図6】変形時の積層ゴムの任意の高さの断面と、積層ゴムをX軸方向及びY軸方向から撮像したときの画像との関係を説明する説明図である。
【図7】本発明の実施形態に係る積層ゴムの任意の高さにおける原点からの移動状態を示す断面と、積層ゴムをX軸方向及びY軸方向から撮像したときの画像との関係を説明する説明図である。
【発明を実施するための形態】
【0021】
本発明の第1実施形態に係る積層ゴム10について説明する。図1に示すように、積層ゴム10は、上下方向に交互に積層された高減衰ゴム製で円形のゴム板18と円形の剛板20とが加硫接着されて形成された積層弾性体12を備えている。また、積層弾性体12の上端及び下端には、上フランジ14と下フランジ16が接着されており、上フランジ14を建物に固定し、下フランジ16を基礎部に固定することで建物を免震構造体とする。
【0022】
また、積層ゴム10の外周面は被覆ゴム22で被覆されている。被覆ゴム22は、ゴム板18及び剛板20に加硫接着されて一体となっている。
【0023】
被覆ゴム22の表面には、周方向に互いに近接した凸状のマーキングA及びBによって構成されたマーキング群Mが形成されている。マーキング群Mは、積層ゴム10の周方向に所定の間隔で複数形成されている。
【0024】
また、マーキング群Mは、積層ゴム10の積層方向に等間隔に複数設けられている。本実施形態では、積層ゴム10の周方向に45度の間隔でマーキング群Mが形成されている。
【0025】
なお、マーキングA、Bを形成する方法としては、被覆ゴム22をプレスして成形する方法や、被覆ゴム22の成形時に一体成形する方法などがある。また、マーキングA、Bを認識することができれば、インク等を用いて被覆ゴム22上に印刷して形成してもよい、さらに、被覆ゴム22上ではなく、ゴム板18及び剛板20上に直接マーキングを印刷して形成してもよい。
【0026】
また、本実施形態では、マーキング群Mは、積層ゴム10の周方向に45度の間隔で8つ設けられているが、更に多くのマーキング群Mを設けても良い。例えば、積層ゴム10の周方向に30度の間隔で12個のマーキング群Mを形成してもよい。ここで、積層ゴム10の中心軸を原点として積層方向と直交するX軸及びY軸を描いたときに、マーキングAやマーキングBがX軸上又はY軸上に設けられていれば、後述するマーキングの座標の算出が容易となる。
【0027】
図2に示すように、検査対象となる積層ゴム10は、建物から取外され、下フランジ16がボルト28で加振装置26の台座31に固定されている。また、積層ゴム10の上フランジ14は加振装置26の加振器30に取付けられている。加振器30は、積層ゴム10へ鉛直方向の荷重を付与すると共に、XY平面内を移動することで、積層ゴム10を水平方向に変位させ、積層ゴム10をせん断変形させる。また、被覆ゴム22上のマーキング群Mは、積層ゴム10に付与された水平方向のせん断力に伴って変位している。
【0028】
次に、本実施形態に係る積層ゴムの検査装置について説明する。図3に示すように、本実施形態に係る積層ゴムの検査装置32は、積層ゴム10を撮像する撮像手段としての2台のカメラ34A、34Bを備えている。カメラ34A及び34Bは、積層ゴム10の中心軸を原点としたX軸及びY軸上にレンズ中心が位置するように配置されている。
【0029】
また、本実施形態では2台のカメラ34A、34Bで積層ゴム10を撮像しているが、2台以上であれば設置するカメラの台数及び位置は特に制限しない。例えば、更に2台のカメラを配置して、4台のカメラで四方から積層ゴム10を撮像してもよい。この場合、X軸方向及びY軸方向の変位量をそれぞれ2台のカメラで撮像して算出できるので、算出精度を上げることができる。
【0030】
2台のカメラ34A、34Bは、制御装置36に接続されており、制御装置36の命令によって撮像を開始し又は停止する。また、制御装置36は、加振装置26にも接続されており、予め設定された加振条件で加振装置26の加振器30を作動させる。
【0031】
また、カメラ34A及びカメラ34Bは、回路基板38に接続されており、カメラ34A及びカメラ34Bで撮像された画像データは、回路基板38の画像データ格納部40へ格納される。回路基板38には、画像データ格納部40の他に、データ抽出部42、マーキング座標算出部44、演算部46、及び制御装置36へ接続された信号発生部48が設けられている。また、回路基板38にはモニタ50が接続されている。
【0032】
次に、検査装置32を用いて積層ゴム10の水平変位量及び回転量を測定する手順について図4のフローチャートに沿って説明する。
【0033】
図示しない測定開始ボタンが押されると、信号発生部48から制御装置36へ信号が送られる。制御装置36は、信号発生部48から信号を受信すると、加振装置26により積層ゴム10へ入力された荷重に応じてカメラ34A及びカメラ34Bへ同時に撮像開始の命令を行い加振する前の積層ゴム10を撮像する(ステップ100)。
【0034】
図4に示すように、撮像開始後、マーキングの初期座標を算出する(ステップ102)。具体的には、図5に示すように、カメラ34Aが積層ゴム10を撮像した画像52A、及びカメラ34Bが積層ゴム10を撮像した画像52Bから、剛板20の周方向に設けられたマーキングA1、A2、A3の座標を算出する。なお、以下の説明において、カメラ34Bの撮像方向をX軸方向、カメラ34Aの撮像方向をY軸方向として説明する。また、無変形状態での積層ゴム10の中心の座標をX=0、Y=0とする。
【0035】
ここで、画像52AのY軸上にマーキングA1があるので、マーキングA1のX座標X1は0となる。また、マーキングA1から反時計回りに45度(π/4)の位置にあるマーキングA2のX座標X2は、剛板20の半径Rを用いて、Rsin(π/4)と表される。
【0036】
同様にして、画像52BのX軸上にマーキングA3があるので、マーキングA3のY座標Y3は0となる。また、マーキングA2のY座標Y2は、−Rcos(π/4)となる。以上により、マーキングA1のX座標X1、マーキングA2のX座標X2、マーキングA3のY座標Y3、及びマーキングA2のY座標Y2の計4つの初期座標を算出した。
【0037】
なお、本実施形態では上記4つの初期座標を算出したが、更に他のマーキングAの座標を算出してもよい。ただし、同一高さに形成されたマーキングAに対して、画像52A及び画像52Bの各画像上で1つ以上の座標を算出すると共に、合計3つ以上の座標を算出する必要がある。
【0038】
図4に示すように、ステップ102でマーキングA1、A2、A3の初期座標が算出した後、加振器30を作動させる(ステップ104)。ここでは、図3に示すように、制御装置36から加振装置26へ信号を送り加振器30を作動させる。加振器30は予め設定された加振条件に基づいて、積層ゴム10を水平方向に変位させる。
【0039】
カメラ34A及びカメラ34Bは、せん断力が付与されている積層ゴム10を撮像し続ける。また、撮像された画像データは画像データ格納部40へ蓄積される。図4に示すように、ステップ108では、ステップ106で画像データ格納部40へ蓄積された画像データから、任意の画像データだけをデータ抽出部42へ抽出する(図3参照)。すなわち、せん断力の増減やせん断方向の変化に応じて、撮像された全ての画像データから数フレーム毎の画像データだけを抽出する。
【0040】
ステップ110では、抽出された画像データ上でマーキング26の座標を算出する。本実施形態では、図6に示すように、画像52A上でマーキングA1のX座標及びマーキングA2のX座標を算出し、画像52B上でマーキングA2のY座標及びマーキングA3のY座標を算出する。
【0041】
ここで、マーキングA1のX座標は積層ゴム10の初期位置の中心座標(0、0)からマーキングA1までの画像52A上の距離x1’となる。また、同様にしてマーキングA2のX座標は、中心座標(0、0)からマーキングA2までの画像52A上の距離x2’、マーキングA2のY座標は、中心座標(0、0)からマーキングA3までの画像52B上の距離y2’、マーキングA3のY座標は、画像52B上の距離y3’となる。
【0042】
次に、図4のステップ112では、画像上のマーキングA1、A2、A3の画像上での移動量を算出する。例えば、図5に示すように、画像52A上ではマーキングA1はY軸上にあったので、マーキングA1のX軸方向の移動量Δx1は、x1’となる(図6参照)。また、マーキングA2のX軸方向の移動量Δx2は、図5の画像52A上のA2の座標x2と、図6の画像52A上のA2の座標x2’から求めることができる。同様にして、Δy2、Δy3を算出する。
【0043】
ステップ114では、以下の方法によって実空間上のマーキング移動量を算出する。図7に示すように、マーキング群M2は、互いに近接するマーキングA2、B2によって構成されている。また、マーキングA2及びB2は、積層ゴム10の周方向に距離Lだけ離れて形成されている。
【0044】
ここで、画像52A上のマーキングA2、B2間の距離はlx2であり、画像52B上のマーキングA2、B2間の距離はly2である。また、マーキングA2及びB2のX軸方向の実際の距離をLx2と仮定する。
【0045】
次に、積層ゴム10の変形に伴ってマーキングA2が移動した移動量は、画像52A上ではΔx2であり、画像52B上ではΔy2である。また、マーキングA2の実際のX軸方向の移動量はΔX2、Y軸方向の移動量はΔY2であると仮定すると、lx2、Lx2、Δx2、及びΔX2の関係式は以下の(1)式で求められる。
・・・・・・・・・・(1)
ここで、Lx2は、距離L及びY軸に対するマーキングA2の角度π/4を用いて、
・・・・・・・・・・・・・(2)
と表されるので、ΔX2は(3)式で表される。
・・・・・・・・・・・・・(3)
【0046】
以上により、マーキングA2の実際のX軸方向の移動量ΔX2を、画像52A上の距離Δx2、lxで表すことができた。同様にしてマーキングA1の実際のX軸方向の移動量ΔX1、マーキングA2の実際のY軸方向の移動量ΔY2、及びマーキングA3の実際のY軸方向の移動量ΔY3は以下の(4)〜(6)式で表される。
・・・・・・・・・・・・・・・・(4)
・・・・・・・・・・・・・・(5)
・・・・・・・・・・・・・・・・(6)
【0047】
次に、図4のステップ116では、ステップ102で算出したマーキングの初期座標からステップ114で算出した実空間上のマーキング移動量を足して、実空間上でのマーキング座標を算出する。実空間上でのマーキングA1のX座標をX1’、マーキングA2のX座標をX2’、Y座標をY2’、マーキングA3のY座標をY3’とすると実空間上でのマーキング座標は以下の(7)〜(10)式で表される。
・・・・・・・・・・・・(7)
・・・・・(8)
・・・・・(9)
・・・・・・・・・・・・・(10)
【0048】
次に、ステップ118では、ステップ116で求めた実空間上でのマーキング座標から積層ゴム10の中心座標XG、YG、及び回転量θを演算する(図6参照)。まず、マーキングA1、A2,及びA3の座標は、XG、YG、及びθを用いて以下の(11)〜(14)式で表される。
・・・・・・・・・・・・・・・・(11)
・・・・・・・・・・・・・(12)
・・・・・・・・・・・・・・(13)
・・・・・・・・・・・・・・・・(14)
【0049】
上記(11)〜(14)式から、XG、YG、θを求めると、以下の(15)〜(17)式となる。なお、本実施形態では、回転量θが微小であることを前提として計算している。
・・・・・・・・・・・・・・(15)
・・・・・・・・・・・・・・・(16)
・・・・・・・・・・・・・(17)
【0050】
上記(15)〜(17)式に対して(7)〜(10)式のX1’、X2’、Y2’、及びY3’を代入することで、積層ゴム10の実際の水平変位量及び回転量を求めることができる。また、積層ゴム10の積層方向に設けられたマーキングA、Bについても同様に演算することで、任意の高さに応じた積層ゴム10の中心軸周りの回転量が求められる(図1参照)。
【0051】
図4に示すように、ステップ120で積層ゴム10の水平変位量及び中心軸周りの回転量が演算後、モニタ50へ演算結果が出力される(図3参照)。モニタ50には、例えば、積層ゴム10の変形状態を再現した3次元像や、せん断力とせん断ひずみ量との関係を示す荷重変位曲線図などが表示される。
【0052】
以上、本発明の実施形態について説明したが、本発明はこうした実施形態に限定されるものでなく、本発明の要旨を逸脱しない範囲において、種々なる態様で実施し得ることは勿論である。例えば、複数の鏡やプリズム等を積層ゴム10の周囲に配置して、マーキング26を同時に撮像する構成であってもよい。
【符号の説明】
【0053】
10 積層ゴム
18 ゴム板
20 剛板
32 検査装置
34A カメラ(撮像手段)
34B カメラ(撮像手段)
44 マーキング座標算出部(座標算出手段)
46 演算部(演算手段)
A マーキング
B マーキング
M マーキング群
【特許請求の範囲】
【請求項1】
上部部材と下部部材に固定され、水平方向に変位される積層ゴムの外周部に周方向へ複数設けられたマーキングを異なる角度から同時に撮像する複数の撮像手段と、
前記撮像手段によって撮像された画像上の前記マーキングの座標を算出する座標算出手段と、
異なる撮像手段によって同時に撮像された複数の画像上の前記マーキングの移動量から、積層ゴムの水平変位量及び中心軸周りの回転量を演算する演算手段と、
を有する積層ゴムの検査装置。
【請求項2】
積層ゴムの中心軸を座標の原点としてX軸上に一方の撮像手段を配置し、Y軸上に他方の撮像手段を配置し、マーキングをX軸上、Y軸上、及び両方の撮像手段から撮像される位置の少なくとも3箇所に設けた請求項1に記載の積層ゴムの検査装置。
【請求項3】
前記積層ゴムの外周部には、周方向に互いに近接した複数の前記マーキングによって構成されたマーキング群が設けられ、
前記撮像手段によって撮像された画像上の複数の前記マーキングの座標から、積層ゴム上での前記マーキングの座標を演算する座標演算手段を更に備えた請求項1又は2に記載の積層ゴムの検査装置。
【請求項4】
剛板と弾性体が交互に積層された積層弾性体と、
前記積層弾性体の外周面を被覆する被覆部材と、
前記被覆部材の表面に、周方向に近接した複数のマーキングをマーキング群として、前記マーキング群を同一高さでかつ周方向に所定の間隔で形成した積層ゴム。
【請求項5】
前記マーキングは、被覆部材をプレス成形することで形成された凹部又は凸部である請求項4に記載の積層ゴム。
【請求項6】
前記マーキング群は、前記積層弾性体の積層方向に複数設けられている請求項4又は5に記載の積層ゴム。
【請求項1】
上部部材と下部部材に固定され、水平方向に変位される積層ゴムの外周部に周方向へ複数設けられたマーキングを異なる角度から同時に撮像する複数の撮像手段と、
前記撮像手段によって撮像された画像上の前記マーキングの座標を算出する座標算出手段と、
異なる撮像手段によって同時に撮像された複数の画像上の前記マーキングの移動量から、積層ゴムの水平変位量及び中心軸周りの回転量を演算する演算手段と、
を有する積層ゴムの検査装置。
【請求項2】
積層ゴムの中心軸を座標の原点としてX軸上に一方の撮像手段を配置し、Y軸上に他方の撮像手段を配置し、マーキングをX軸上、Y軸上、及び両方の撮像手段から撮像される位置の少なくとも3箇所に設けた請求項1に記載の積層ゴムの検査装置。
【請求項3】
前記積層ゴムの外周部には、周方向に互いに近接した複数の前記マーキングによって構成されたマーキング群が設けられ、
前記撮像手段によって撮像された画像上の複数の前記マーキングの座標から、積層ゴム上での前記マーキングの座標を演算する座標演算手段を更に備えた請求項1又は2に記載の積層ゴムの検査装置。
【請求項4】
剛板と弾性体が交互に積層された積層弾性体と、
前記積層弾性体の外周面を被覆する被覆部材と、
前記被覆部材の表面に、周方向に近接した複数のマーキングをマーキング群として、前記マーキング群を同一高さでかつ周方向に所定の間隔で形成した積層ゴム。
【請求項5】
前記マーキングは、被覆部材をプレス成形することで形成された凹部又は凸部である請求項4に記載の積層ゴム。
【請求項6】
前記マーキング群は、前記積層弾性体の積層方向に複数設けられている請求項4又は5に記載の積層ゴム。
【図1】

【図2】
【図3】

【図4】
【図5】

【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−108945(P2013−108945A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−256336(P2011−256336)
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000005278)株式会社ブリヂストン (11,469)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000005278)株式会社ブリヂストン (11,469)
【Fターム(参考)】
[ Back to top ]