
穴の内部検査装置、検査方法、およびプログラム
【課題】検査対象の穴径が数百ミクロン以下であっても穴の内部を簡便に、短時間で検査することが可能な穴の内部検査装置を提供する。
【解決手段】穴の内部検査装置100は、カメラ10と、カメラ10に対向して設けられた光源20と、カメラ10が取得した画像を処理する制御部30と、を備え、カメラ10は、カメラ10と光源20との間に置かれた被検査物2に貫通して形成された穴1の内部を、光源20から照射される光によって得られる画像によって穴1の一方の端から他方の端までを所定の間隔で走査することで複数の走査画像Isを取得し、制御部30は、複数の走査画像Isに分布する輝度に基づいて被検査画像を選択し、被検査画像に対して画像処理を行うことで所望の検査を行う。
【解決手段】穴の内部検査装置100は、カメラ10と、カメラ10に対向して設けられた光源20と、カメラ10が取得した画像を処理する制御部30と、を備え、カメラ10は、カメラ10と光源20との間に置かれた被検査物2に貫通して形成された穴1の内部を、光源20から照射される光によって得られる画像によって穴1の一方の端から他方の端までを所定の間隔で走査することで複数の走査画像Isを取得し、制御部30は、複数の走査画像Isに分布する輝度に基づいて被検査画像を選択し、被検査画像に対して画像処理を行うことで所望の検査を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、穴の内部検査装置、検査方法、およびプログラムに関する。
【背景技術】
【0002】
従来、加工製品に形成された穴の内部を検査する方法として、例えば、特許文献1に記載されているように、穴の内部に照明用のプローブを挿入し、穴側面からの反射光をCCD(Charge Coupled Device)カメラなどで画像記録し、その画像を処理することにより検査する方法が知られていた。
また、例えば、特許文献2に記載されているように、穴の内部にプローブや検査ヘッドなどを挿入することなく、視野角の大きな広角レンズを用いたカメラで穴の内部表面を撮像し、得られた画像を処理することにより検査する方法が知られていた。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−257979号公報
【特許文献2】特開2011−89826号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の検査方法では、検査対象の穴径が数百ミクロン以下の場合には、微細なプローブを作り、精度良く穴に挿入する必要があるなど、簡便に検査することが困難であるという課題があった。
また、特許文献2に記載の検査方法では、得られた画像の座標系の変換処理や、遠近補正処理、ゆがみ補正処理などの多くの画像処理を必要としたため、検査時間が長くなってしまうという課題があった。
【課題を解決するための手段】
【0005】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の適用例または形態として実現することが可能である。
【0006】
[適用例1]本適用例に係る穴の内部検査装置は、被検査物を撮像し、被検査物の画像を取得する撮像手段と、撮像手段に対向して設けられた光源と、撮像手段が取得した画像を処理する画像処理手段と、を備え、撮像手段は、撮像手段と光源との間に置かれた被検査物に貫通して形成された穴の内部を、光源から照射される光によって得られる画像によって穴の一方の端から他方の端までを所定の間隔で走査することで複数の走査画像を取得し、画像処理手段は、複数の走査画像に分布する輝度の情報に基づいて、複数の走査画像の中から被検査画像を選択し、被検査画像に対して画像処理を行うことで所望の検査を行うことを特徴とする。
【0007】
本適用例によれば、光源から照射される光によって得られる画像によって穴の一方の端から他方の端までを所定の間隔で走査することで得られた画像を基に検査を行う。そのため、穴の内部に照明用のプローブを挿入する必要が無く、検査対象の穴径が数百ミクロン以下の場合であっても、簡便に検査を行うことができる。また、穴の一方の端から他方の端まで走査することで得られた複数の走査画像のすべてに対して検査に必要な画像処理を行うのではなく、選択された被検査画像に対して画像処理を行うことで所望の検査を行う。そのため、画像処理を行う頻度が少なくなり、検査時間を短縮することができる。
従って、本適用例によれば、検査対象の穴径が数百ミクロン以下であっても穴の内部を簡便に、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0008】
[適用例2]上記適用例に係る穴の内部検査装置において、画像処理手段は、複数の走査画像の中から、最も輝度の低い走査画像を選択して被検査画像とすることを特徴とする。
【0009】
本適用例によれば、穴の内部の異物検査などにおいて、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、より精度の高い検査を行うために必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0010】
[適用例3]上記適用例に係る穴の内部検査装置において、画像処理手段は、複数の走査画像のそれぞれを構成する複数の画素の輝度を参照し、複数の走査画像の中から、所定の値を上回る輝度の画素の数が最も少ない走査画像を選択して被検査画像とすることを特徴とする。
【0011】
本適用例によれば、穴の内部の異物検査などにおいて、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、より精度の高い検査を行うために必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0012】
[適用例4]上記適用例に係る穴の内部検査装置において、複数の走査画像のそれぞれには、被検査物に貫通して形成された複数の穴の内部が同時に撮像された画像が含まれ、画像処理手段は、同時に撮像されたそれぞれの穴の内部の画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、複数の走査画像の中から、輝度の差の合計値が最も大きい走査画像を選択して被検査画像とすることを特徴とする。
【0013】
本適用例によれば、穴の内部の異物検査などにおいて、複数の穴を同時に検査することが可能であり、また、一部の穴に異物が検出された場合には、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0014】
[適用例5]上記適用例に係る穴の内部検査装置において、複数の走査画像のそれぞれには、被検査物に貫通して形成された複数の穴の内部が同時に撮像された画像が含まれ、画像処理手段は、同時に撮像されたそれぞれの穴の内部の画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、複数の走査画像の中から、輝度の差が所定の値を上回る画素の数が最も大きい走査画像を選択して被検査画像とすることを特徴とする。
【0015】
本適用例によれば、穴の内部の異物検査などにおいて、複数の穴を同時に検査することが可能であり、また、一部の穴に異物が検出された場合には、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0016】
[適用例6]上記適用例に係る穴の内部検査装置において、画像処理手段は、複数の走査画像のそれぞれを構成する複数の画素を、それぞれの画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、複数の2値化走査画像における白画素の数を比較し、白画素の数が最も少ない2値化走査画像が生成された走査位置の走査画像を被検査画像とすることを特徴とする。
【0017】
本適用例によれば、複数の走査画像のそれぞれを構成する複数の画素を、それぞれの画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、焦点の合っていない異物表面部分の画素を白画素に置き換えることができる。次に、その白画素の数を比較し、白画素の数が最も少ない2値化走査画像を選択することで、最も焦点が合っている走査位置の画像が選択される。そのため、白画素の数が最も少ない2値化走査画像が生成された走査位置の走査画像(2値化前の画像)を被検査画像とすることで、最も焦点の合っている走査画像を用いて検査を行うことになり、穴の内部の異物検査などにおいて、より精度の高い検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少ない、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0018】
[適用例7]上記適用例に係る穴の内部検査装置において、複数の走査画像のそれぞれには、被検査物に貫通して形成された複数の穴の内部が同時に撮像された画像が含まれ、画像処理手段は、複数の走査画像のそれぞれを構成する複数の画素を、それぞれの画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、複数の走査画像の中から、同時に撮像された複数の穴の白画素の数の差が最も大きい2値化走査画像が生成された走査位置の走査画像を選択して被検査画像とすることを特徴とする。
【0019】
本適用例によれば、穴の内部の異物検査などにおいて、複数の穴を同時に検査することが可能であり、また、一部の穴に異物が検出された場合には、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0020】
[適用例8]本適用例に係る穴の内部検査方法は、撮像手段と光源との間に置かれた被検査物に貫通して形成された穴の内部を、光源から照射される光によって得られる撮像画像を処理することで検査する方法であって、撮像手段によって、穴の一方の端から他方の端までを所定の間隔で走査することで複数の走査画像を取得する走査ステップと、複数の走査画像に分布する輝度の情報に基づいて、複数の走査画像の中から被検査画像を選択する選択ステップと、被検査画像に対して画像処理を行い所望の検査をする検査ステップと、を含むことを特徴とする。
【0021】
本適用例によれば、光源から照射される光によって得られる画像によって穴の一方の端から他方の端までを所定の間隔で走査することで得られた画像を基に検査を行う。そのため、穴の内部に照明用のプローブを挿入する必要が無く、検査対象の穴径が数百ミクロン以下の場合であっても、簡便に検査を行うことができる。また、穴の一方の端から他方の端まで走査することで得られた複数の走査画像のすべてに対して検査に必要な画像処理を行うのではなく、選択された被検査画像に対して画像処理を行うことで所望の検査を行う。そのため、画像処理を行う頻度が少なくなり、検査時間を短縮することができる。
従って、本適用例によれば、検査対象の穴径が数百ミクロン以下であっても穴の内部を簡便に、短時間で検査することが可能な検査方法を提供することができる。
【0022】
[適用例9]上記適用例に係る穴の内部検査方法において、選択ステップは、複数の走査画像の中から最も輝度の低い走査画像を選択して被検査画像とすることを特徴とする。
【0023】
本適用例によれば、穴の内部の異物検査などにおいて、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、より精度の高い検査を行うために必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な検査方法を提供することができる。
【0024】
[適用例10]上記適用例に係る穴の内部検査方法において、選択ステップは、複数の走査画像のそれぞれを構成する複数の画素の輝度を参照し、複数の走査画像の中から、所定の値を上回る輝度の画素の数が最も少ない走査画像を選択して被検査画像とすることを特徴とする。
【0025】
本適用例によれば、穴の内部の異物検査などにおいて、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、より精度の高い検査を行うために必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な検査方法を提供することができる。
【0026】
[適用例11]上記適用例に係る穴の内部検査方法において、走査ステップは、複数の走査画像のそれぞれに、被検査物に貫通して形成された複数の穴の内部が同時に含まれるように撮像し、選択ステップは、同時に撮像されたそれぞれの穴の内部の画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、複数の走査画像の中から、輝度の差の合計値が最も大きい走査画像を選択することを特徴とする。
【0027】
本適用例によれば、穴の内部の異物検査などにおいて、複数の穴を同時に検査することが可能であり、また、一部の穴に異物が検出された場合には、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な検査方法を提供することができる。
【0028】
[適用例12]上記適用例に係る穴の内部検査方法において、走査ステップは、複数の走査画像のそれぞれに、被検査物に貫通して形成された複数の穴の内部が同時に含まれるように撮像し、選択ステップは、同時に撮像されたそれぞれの穴の内部の画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、複数の走査画像の中から、輝度の差が所定の値を上回る画素の数が最も大きい走査画像を選択することを特徴とする。
【0029】
本適用例によれば、穴の内部の異物検査などにおいて、複数の穴を同時に検査することが可能であり、また、一部の穴に異物が検出された場合には、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な検査方法を提供することができる。
【0030】
[適用例13]上記適用例に係る穴の内部検査方法において、選択ステップは、複数の走査画像のそれぞれを構成する複数の画素を、それぞれの画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、複数の2値化走査画像における白画素の数を比較し、白画素の数が最も少ない2値化走査画像が生成された走査位置の走査画像を被検査画像として選択することを特徴とする。
【0031】
本適用例によれば、複数の走査画像のそれぞれを構成する複数の画素を、それぞれの画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、焦点の合っていない異物表面部分の画素を白画素に置き換えることができる。次に、その白画素の数を比較し、白画素の数が最も少ない2値化走査画像を選択することで、最も焦点が合っている走査位置の画像が選択される。そのため、白画素の数が最も少ない2値化走査画像が生成された走査位置の走査画像(2値化前の画像)を被検査画像とすることで、最も焦点の合っている走査画像を用いて検査を行うことになり、穴の内部の異物検査などにおいて、より精度の高い検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少ない、短時間で検査することが可能な検査方法を提供することができる。
【0032】
[適用例14]上記適用例に係る穴の内部検査方法において、走査ステップは、複数の走査画像のそれぞれに、被検査物に貫通して形成された複数の穴の内部が同時に含まれるように撮像し、選択ステップは、複数の走査画像のそれぞれを構成する複数の画素を、それぞれの画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、複数の走査画像の中から、同時に撮像された複数の穴の白画素の数の差が最も大きい2値化走査画像が生成された走査位置の走査画像を選択して被検査画像とすることを特徴とする。
【0033】
本適用例によれば、穴の内部の異物検査などにおいて、複数の穴を同時に検査することが可能であり、また、一部の穴に異物が検出された場合には、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な検査方法を提供することができる。
【0034】
[適用例15]本適用例に係るプログラムは、穴の内部検査装置を、上記に記載の穴の内部検査方法を含み機能させることを特徴とする。
【0035】
本適用例によれば、上記に記載の穴の内部検査方法を含み機能させるプログラムを用いることで、穴の内部を簡便に、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【図面の簡単な説明】
【0036】
【図1】実施形態1に係る穴の内部検査装置としての検査装置の概略図。
【図2】(a)被検査物2に貫通する穴1の側断面図、(b)穴1の側断面図に示す位置に対応する走査画像Isの例を示す説明図。
【図3】(a)穴1の側断面図、(b)穴1の側断面図に示す走査位置に対応する走査画像Isの輝度分布のグラフ。
【図4】穴の内部検査方法を説明するフローチャート。
【図5】(a)〜(e)走査画像の2値化に関する説明図。
【図6】(a)穴1の側断面図、(b)穴1の側断面図に示す走査位置に対応する2値化走査画像の白画素数の分布のグラフ。
【図7】(a)穴1a、1bの側断面図、(b)実施形態3に係る走査画像Isの説明図、(c)穴の輝度の差の分布を示すグラフ。
【図8】(a)穴1a、1bの側断面図、(b)実施形態4に係る走査画像Isの説明図、(c)2値化走査画像におけるそれぞれの穴の白画素数の分布を示すグラフ、(d)2値化走査画像におけるそれぞれの穴の白画素数の差の分布を示すグラフ。
【図9】(a)〜(d)変形例1に係る輝度勾配θの説明図。
【図10】変形例2に係る、図6(a)、(b)の部分拡大図。
【発明を実施するための形態】
【0037】
以下に本発明を具体化した実施形態について、図面を参照して説明する。以下は、本発明の一実施形態であって、本発明を限定するものではない。なお、以下の各図においては、説明を分かりやすくするため、実際とは異なる尺度で記載している場合がある。
【0038】
(実施形態1)
まず、実施形態1に係る穴の内部検査装置および検査方法について説明する。
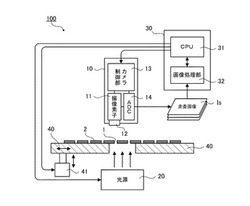
図1は、実施形態1に係る穴の内部検査装置としての検査装置100の概略図である。
検査装置100は、穴の内部の異物検査などを主な目的とするものであり、撮像手段としてのカメラ10と、光源20、制御部30、検査ステージ40などから構成されている。
【0039】
カメラ10は、略鉛直方向を向くように設置され、必要な間隔を置いて配置された検査ステージ40を挟んで光源20と対向している。
検査ステージ40には、検査対象の穴1が貫通して形成された被検査物2が載置される。光源20から照射される光が穴1を通過してカメラ10に捉えられ、カメラ10が捉えた光によって生成された画像を制御部30で処理することにより穴1の内部の検査が行われる。
【0040】
カメラ10は、撮像素子11、光学系12、カメラ制御部13、ADC(Analog to Digital Converter)回路14などから構成される。撮像素子11は、CCD型やCMOS(Complementary Metal Oxide Semiconductor)型などのイメージセンサーであり、光学系12を通して受光した光をカメラ制御部13の制御の下に処理して画像として取り込む。取り込まれた画像は、走査画像IsとしてADC回路14から出力される。走査画像Isは、撮像素子11を構成する複数の画素のそれぞれが受光した輝度情報などから構成される。
【0041】
制御部30は、CPU(Central Processing Unit)31、画像処理部32などによって構成される。
CPU31は、所定のプログラムによりカメラ10、光源20、検査ステージ40、画像処理部32などの制御を行う。
画像処理部32は、画像処理手段としての機能を有し、カメラ10が捉えた走査画像Isの画像処理を行うことで、検査および判定を行う。
【0042】
検査ステージ40は、被検査物2を略水平に載置するテーブルであり、ステージ駆動機構41を備えている。ステージ駆動機構41は、CPU31の制御の基に、検査ステージ40を水平方向および鉛直方向に移動させ、所望の位置に被検査物2を位置させる機能を有している。
【0043】
次に、検査装置100による穴の内部検査の方法について説明する。
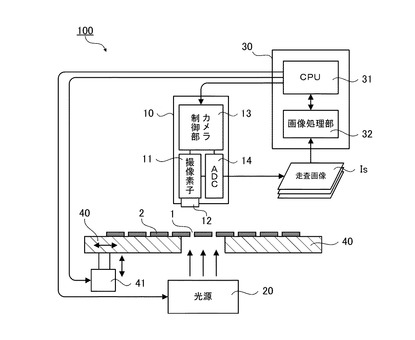
図2(a)は、被検査物2に貫通する穴1の側断面図、図2(b)は、穴1の側断面図に示す位置に対応する走査画像Isの例を示す図である。側断面図における下方向は鉛直方向を意味しており、穴1内の中間よりやや下方に異物Fが存在する様子を表している。
【0044】
穴1内部の異物Fの有無の検査は、異物Fの大きさに対して所定の閾値を設け、その閾値を越える異物Fが検出された場合に、異物Fが有ると判定する。
異物Fの大きさの検出は画像処理により行い、検査装置100の場合には、穴1を通過する光を遮る異物Fの陰の大きさにより判定を行っている。具体的には、カメラ10が捉えた穴1の断面形状(異物Fの陰も含めた形状)に内接する円の最小径を測定し、設定した閾値と比較することで判定を行っているが、この方法に限定するものではない。
【0045】
穴1の断面形状を画像として捉えるために、穴1の下部から照射される光源20の光を穴1の上部に設置されるカメラ10により撮像する。精度の高い検査を実現するためには、画像処理により穴1の断面形状を正確に取得することが必要である。つまり、被検査物2の厚みに対して、光学系12の被写界深度が浅い場合には、異物Fの位置に焦点を合わせた画像を取得する必要があり、穴1の内部における異物Fの位置は、一定しないため、異物Fの位置を特定し、焦点を合わせるための処理を行っている。その方法について以下に具体的に説明する。
【0046】
図2(a)においてL1〜L9(以下、走査位置Ln、n=1〜9)は、穴1の下端から上端までを等間隔に8等分した高さを示している。
図2(b)は、カメラ10が捉えた走査画像Is(穴1の断面画像)の内、走査位置L1、L4、L9のそれぞれに焦点を合わせた時の走査画像Isのイメージ図である。焦点位置を移動させる方法は、光学系12の焦点距離を固定し、光学系12の焦点位置に合うように検査ステージ40を上下させることにより行っている。
【0047】
図2(b)に示すように、異物Fの位置に略焦点が合った画像(走査位置L4付近の画像)に対して、検査ステージ40を上下させて撮像した穴1の下端(走査位置L1)や上端(走査位置L9)に焦点が合った画像では、異物Fを鮮明に捉えることができず、走査画像Isに占める異物Fの陰影部分の面積が小さくなった画像が得られる。つまり、異物Fの大きさを正確に捉え、正確な判定を行うには、まず、穴1内部の異物Fの位置を特定する必要がある。
【0048】
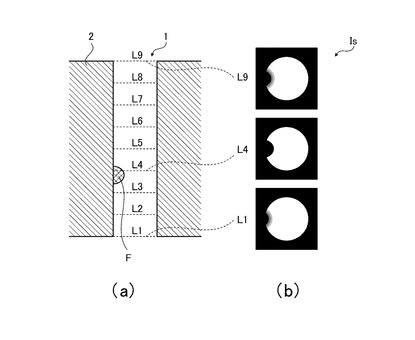
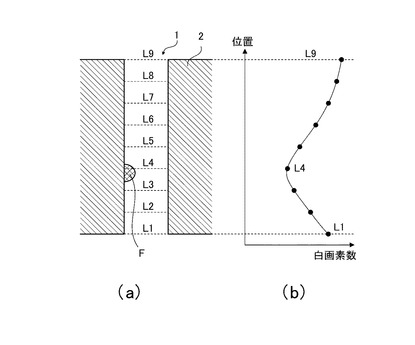
図3(a)は、穴1の側断面図、図3(b)は、穴1の側断面図に示す走査位置に対応する走査画像Isの輝度分布のグラフである。
穴1内部の異物Fの位置を特定する方法として、本実施形態では、カメラ10が捉える走査画像Isの総合輝度の値(以下輝度As)の分布を解析することによって行っている。以下に具体的に説明する。
【0049】
走査画像Isの輝度Asは、穴1のそれぞれの走査位置Lnの面を横切り、かつ光学系12を通過して撮像素子11に入射する光の量である。穴1を通過する光のうち、穴1の軸方向との平行成分以外の光成分(具体的には、例えば穴1の内径より広い範囲から入射し、穴1の内壁に反射して撮像素子11に入射する光や、異物Fの表面を反射する光など)により、カメラ10と異物Fとの相対位置が変化すると、撮像素子11に入射する光の量が変化する。その結果、走査位置Lnの各位置で捉えられる走査画像Is(以下、走査画像Isn、n=1〜9)の輝度As(Asn、n=1〜9)の分布は、図3(b)に示すように異物Fの位置の輝度Asが最も小さくなるような分布となる。
【0050】
つまり、穴1内部の異物Fの位置は、まず、走査位置L1〜L9の各位置における走査画像Is1〜Is9を取得し、次にそれぞれの輝度As1〜As9を比較して、最も輝度Asが小さくなる位置として求めることができる。次に、その位置における走査画像Isを解析(画像処理)することで異物Fの検査・判定を行う。
【0051】
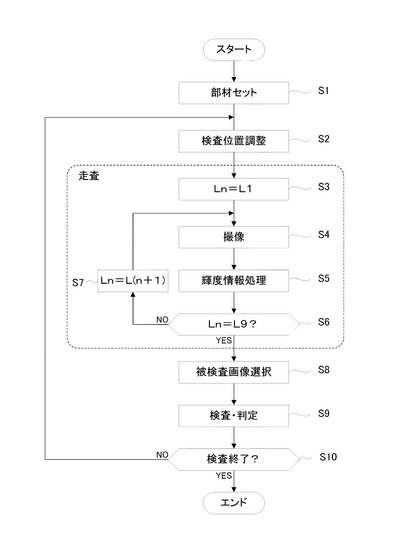
図4に、本実施形態における穴の内部検査のフローチャートを示す。本フローチャートに従い、上述した方法を具体的に説明する。なお、検査装置100は、本フローチャートに従った穴の内部検査方法を含み検査装置100を機能させるプログラムを備えている。
【0052】
まず、被検査物2を検査ステージ40(図1)にセットする(ステップS1)。
次に、検査ステージ40の位置を調整し、光学系12の下に検査対象としての被検査物2の穴1を移動させる(ステップS2)。
次に、光学系12および検査ステージ40の高さ調整により、光学系12の焦点を走査位置L1に合わせる(ステップS3)。
次に、カメラ10により、走査位置L1を撮像し、走査画像Is1を取得する(ステップS4)。
次に、画像処理部32において走査画像Is1から走査位置L1の輝度As1を求める(ステップS5)。輝度As1は、走査画像Is1を構成する各画素の持つ輝度(以下輝度Ap)の値を総計することで得られる。
引き続き、走査位置L2からL9まで同様に走査画像Is2〜Is9を取得して対応するそれぞれの輝度Asnを求める(ステップS6、S7)。
ステップS3〜ステップS7までが走査ステップとなる。
【0053】
次に、選択ステップとして、走査位置L1〜L9の各位置で求められた輝度As1〜As9を比較し、最も小さな輝度を示す走査位置の走査画像Isを被検査画像として選択する(ステップS8)。
次に、検査ステップとして、被検査画像に対して所望の画像処理を行い検査・判定を行う(ステップS9)。
被検査物2に複数の穴1がある場合には、すべての穴1の検査が完了したか確認し(ステップS10)、完了した場合には、検査を終了する。完了していない場合には、別の穴1にシフトしてステップS2から繰り返す。
以上のフローにより、簡便に穴1の内部の検査を行うことができる。
【0054】
なお、本実施形態においては、穴1の下端から上端までを等間隔に8等分し、走査位置をL1〜L9として説明したが、これに限定するものではなく、被検査物2の厚みや、判定する異物Fの大きさ、検査精度などに応じ、適宜設定することが好ましい。
【0055】
以上述べたように、本実施形態による穴の内部検査装置、検査方法およびこの検査方法を含み機能させるプログラムによれば、以下の効果を得ることができる。
【0056】
光源20から照射される光によって得られる画像によって穴1の一方の端から他方の端までを所定の間隔で走査することで得られた走査画像Isを基に検査を行う。そのため、穴1の内部に照明用のプローブを挿入する必要が無く、検査対照の穴径が数百ミクロン以下の場合であっても、簡便に検査を行うことができる。また、穴1の一方の端から他方の端まで走査することで得られた複数の走査画像Isnのすべてに対して検査に必要な画像処理を行うのではなく、選択された被検査画像に対して画像処理を行うことで所望の検査を行う。そのため、検査のための時間を要する画像処理を行う頻度が少なくなり、検査時間を短縮することができる。
その結果、検査対象の穴径が数百ミクロン以下であっても穴の内部を簡便に、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0057】
(実施形態2)
次に、実施形態2に係る穴の内部検査装置および検査方法について説明する。なお、説明にあたり、上述した実施形態と同一の構成部位については、同一の符号を使用し、重複する説明は省略する。
【0058】
実施形態1では、穴1内部の異物Fの位置を求める方法として、まず、走査位置L1〜L9の各位置における走査画像Is1〜Is9を取得し、次にそれぞれの輝度As1〜As9を比較して、最も輝度Asが小さくなる位置として求めていた。これに対し、本実施形態では、直接、走査画像Is1〜Is9のそれぞれが持つ輝度の値を比較するのではなく、走査画像Is1〜Is9を一旦黒画素と白画素とに2値化して、白画素の数を比較し、最も白画素の数が少なくなる位置を穴1内部の異物Fの位置として求めることを特徴としている。
【0059】
図5(a)〜(f)は、走査画像Isの2値化を説明する図である。
図5(a)は、異物Fに焦点の合っていない走査画像Isを示す図であり、図2(a)、(b)における走査位置L1やL9などに対応する走査画像Isである。焦点が合っていない部分は、図示するDに示すようなグレー領域として画像が形成される。
図5(b)は、図5(a)のX‐X′上の画素に分布する輝度Apの例を示すグラフである。穴1の外側の部分は、輝度Apが略0の黒領域であり、穴1の中央部分の輝度Apが例えば255のレベルであることを示している。異物Fの周辺の焦点が合っていない部分(Dの領域)は、輝度Apが略0から255までのグレーな遷移領域であることを示している。
図5(c)は、異物Fに略焦点の合っている走査画像Isを示す図であり、図2(a)、(b)における走査位置L4付近に対応する走査画像Isである。異物Fの周辺の焦点が合っていない部分(Dの領域)は、図5(c)に示すように図5(a)に比較して僅かになっている。
【0060】
次に、2値化について具体的に説明する。
本実施形態における2値化とは、略0から255までのグレーな遷移領域に分布する輝度の値を、0と255とに2分類することである。例えば、閾値として輝度64を設定し、0を上回り64までの輝度をすべて0とし、64を上回り255までの輝度を255とする。すると、輝度Apの分布は、図5(b)、(d)の破線に示すようになり、また、走査画像Isは、それぞれ図5(e)、(f)に示すような黒画像と白画素で構成される画像(2値化走査画像)になる。
【0061】
図6(a)は、穴1の側断面図、図6(b)は、穴1の側断面図に示す走査位置に対応する2値化走査画像の白画素数の分布図である。
2値化を行うことにより、図6(b)のグラフに示されるように、異物Fに焦点が合うほど、白画素数が少なくなる。つまり、穴1内部の異物Fの位置は、まず、走査位置L1〜L9の各位置における走査画像Is1〜Is9を取得し、次にそれぞれの2値化走査画像を生成し、それぞれの2値化走査画像の白画素数を比較して、最も白画素数が少なくなる位置として求めることができる。次に、その位置における走査画像Isを解析(画像処理)することで異物Fの検査・判定を行う。
【0062】
具体的な検査方法としては、実施形態1において輝度Asを求めたステップS5において、輝度Asに代わり上述したように白画素の数を求め、また、実施形態1において最も小さな輝度を示す走査位置の走査画像Isを被検査画像として選択するステップS8に代わり、最も少ない白画素の数を示す走査位置の走査画像Isを被検査画像として選択することで、同様に検査を行うことができる。
【0063】
なお、上記の説明では、一旦、走査画像Isを2値化走査画像に変換し、白画素の数を数えるとして説明したが、走査画像Isを構成する個々の画素の輝度を参照し、輝度64を上回る画素の数を数える方法であっても良い。つまり、所定の閾値を設定し、その値を上回る輝度の画素の数が最も少ない走査位置の走査画像Isを選択して被検査画像とする方法であっても良い。
【0064】
また、最も少ない白画素数が所定の数を上回っている場合、あるいは輝度64以下の画素の数の最大値が所定の数を下回っている場合には、被検査画像を選択することなく、検査対象とする穴1の検査を完了しても良い。具体的には、穴1の内部に検出すべき異物Fが無い場合に相当する。
【0065】
以上述べたように、本実施形態による穴の内部検査装置、検査方法およびこの検査方法を含み機能させるプログラムによれば、以下の効果を得ることができる。
【0066】
複数の走査画像Isのそれぞれを構成する複数の画素を、それぞれの画素が持つ輝度Apの情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、焦点の合っていない異物F表面部分の画素を白画素に置き換えることができる。次に、その白画素の数を比較し、白画素の数が最も少ない2値化走査画像を選択することで、最も焦点が合っている走査位置の画像が選択される。そのため、白画素の数が最も少ない2値化走査画像が生成された走査位置の走査画像Is(2値化前の画像)を被検査画像とすることで、最も焦点の合っている走査画像Isを用いて検査を行うことになり、穴1の内部の異物検査などにおいて、より精度の高い検査を行うことができる。
【0067】
また、所定の閾値を基に2値化を行うことで、輝度の差ではなく、画像の鮮鋭度(焦点の変化による画像のグレー領域の度合い)に基づく走査位置の評価を行なうことができるため、複数の走査画像Is間の輝度Asの差の度合いに比較して画像の鮮鋭度の度合いの差が大きい場合には、より有効に被検査画像を選択することができる。
【0068】
(実施形態3)
次に、実施形態3に係る穴の内部検査装置および検査方法について説明する。なお、説明にあたり、上述した実施形態と同一の構成部位については、同一の符号を使用し、重複する説明は省略する。
【0069】
実施形態1では、一つの穴の検査を行う方法および装置として説明したが、本実施形態は、複数の穴を比較しながら同時に検査することを特徴とする。従って、本実施形態では、複数の同じ内径の穴が形成されている被検査物の穴の内部検査を行う装置およびその検査方法として説明する。本実施形態による検査は、複数の穴のいずれかに異物が含まれるか否かなどの検査を行う場合に有効である。
【0070】
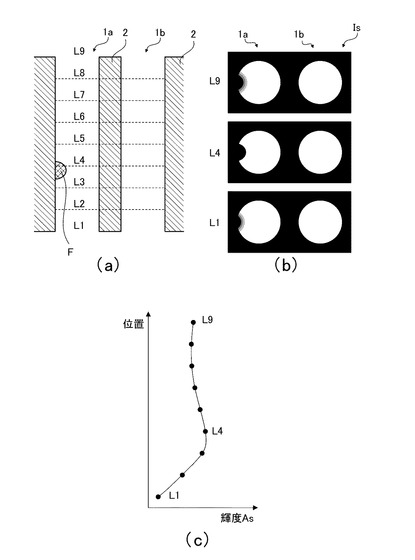
図7(a)は、穴1a、1bの側断面図、図7(b)は、本実施形態に係る走査画像Isの説明図、図7(c)は、それぞれの穴の輝度の差の分布を示すグラフである。
図7(a)、(b)に示すように、ここでは、2つの穴(穴1aおよび穴1b)の検査を同時に行う場合を説明する。図7(a)に示すように、異物Fは、穴1a内の中間よりやや下方に異物Fが存在する様子を表している。
【0071】
まず、カメラ10により、図7(b)に示すような、穴1aと穴1bが含まれる走査画像Isを取得する。
次に、穴1a内部と穴1b内部のそれぞれの画像のパターンマッチング処理により、それぞれの画像を構成する画素の対応付けを行なう。具体的には、例えば、それぞれの穴形状の重心を求め、その重心を重ねることで重なり合う画素の対応をつける方法や、あるいは、穴側面部形状(図7(b)においては円形の周形状)のパターンを重ね合わせ、重なり合う位置の画素を対応つける方法などがある。
【0072】
次に、対応する画素どうしの輝度の差を算出し、それらの値を合計する。具体的には、穴1aの一つの画素の輝度値から穴1bの対応する位置の画素の輝度値を差し引く計算を行ない、すべての画素について同様に実施した後に、その合計値を算出する。
ここで得られる輝度の差の合計値は、図7(c)のようになる。
異物Fに近い走査位置の分布ほど、輝度の差の合計値が大きくなる。つまり、穴1a内部の異物Fの位置は、最も輝度の差の合計値が大きくなる位置として求めることができる。次に、その位置における走査画像Isを解析することで異物Fの判定を行う。
【0073】
この検査方法では、差異によって異物の位置を検出しているため、同時に検査する穴の内部の同じ位置に異物Fが存在する確率が低い場合に有効である。同時に検査する穴の数が多いほど、この確率は低下するため、複数の穴の検査には有効な方法である。
【0074】
以上述べたように、本実施形態による穴の内部検査装置、検査方法およびこの検査方法を含み機能させるプログラムによれば、以下の効果を得ることができる。
穴の内部の異物検査などにおいて、複数の穴を同時に検査することが可能であり、また、一部の穴に異物が検出された場合には、異物のある部分の被検査画像を選択して検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0075】
(実施形態4)
次に、実施形態4に係る穴の内部検査装置および検査方法について説明する。なお、説明にあたり、上述した実施形態と同一の構成部位については、同一の符号を使用し、重複する説明は省略する。
【0076】
実施形態3では、複数の穴を比較しながら同時に検査する方法として、それぞれの穴の画像を構成する画素の輝度の差の合計の値の評価により、最適な走査画像Isの位置を求めるとして説明した。これに対し、本実施形態では、走査画像Isを2値化し得られた2値化走査画像におけるそれぞれの穴の画像を構成する白画素の数を比較し、その差異を評価することで最適の走査位置を求めることを特徴としている。
【0077】
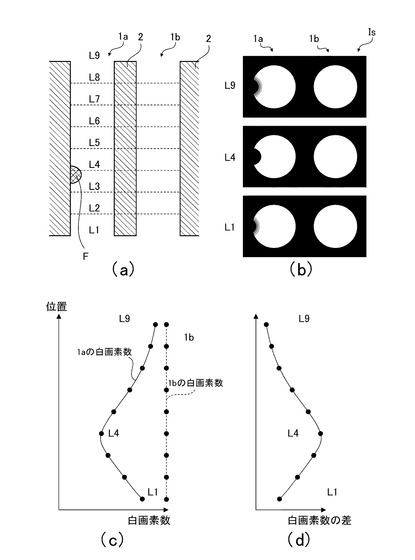
図8(a)は、穴1a、1bの側断面図、図8(b)は、本実施形態に係る走査画像Isの説明図、図8(c)は、2値化走査画像におけるそれぞれの穴の白画素数の分布を示すグラフ、図8(d)は、2値化走査画像におけるそれぞれの穴の白画素数の差の分布を示すグラフである。
図8(a)、(b)に示すように、ここでは、2つの穴(穴1aおよび穴1b)の検査を同時に行う場合を説明する。図8(a)に示すように、異物Fは、穴1a内の中間よりやや下方に異物Fが存在する様子を表している。
【0078】
まず、カメラ10により、図8(b)に示すような、穴1aと穴1bが含まれる走査画像Isを取得する。
次に、実施形態2の場合と同様に、2値化走査画像を生成する。
ここで得られる2値化走査画像における穴1a、穴1bそれぞれの白画素数の分布は、図8(c)のようになる。穴1aの白画素数の分布は、図6(b)と同様であり、穴1bの分布は、異物Fが無いため、略直線となる。
次に、2値化走査画像における穴1aと穴1bのそれぞれを構成する白画素の数を比較し、その差異を算出する。その差異の分布は、図8(d)に示すようになる。
【0079】
異物Fに近い走査位置の分布ほど、白画素数の差異が大きくなる。つまり、穴1a内部の異物Fの位置は、最も白画素数の差異が大きくなる位置として求めることができる。次に、その位置における走査画像Isを解析(画像処理)することで異物Fの検査・判定を行う。この際に、異物Fの検査・判定は、異物Fの存在により白画素数の変化がより大きく確認された穴1aに対してだけ行う。
【0080】
この検査方法では、差異によって異物の位置を検出しているため、同時に検査する穴の内部の同じ位置に異物Fが存在する確率が低い場合に有効である。同時に検査する穴の数が多いほど、この確率は低下するため、複数の穴の検査には有効な方法である。
【0081】
なお、上記の説明では、一旦、走査画像Isを2値化走査画像に変換し、白画素の数を数えるとして説明したが、走査画像Isを構成する個々の画素の輝度を参照し、輝度64を上回る画素の数を数える方法であっても良い。つまり、所定の閾値を設定し、その値を上回る輝度の画素の数の数を比較し、その差異を算出して最もその差異が大きい走査位置の走査画像Isを選択して被検査画像とする方法であっても良い。
【0082】
また、最も大きい差異の値が所定の数を下回っている場合には、被検査画像を選択することなく、検査対象とする穴1の検査を完了しても良い。具体的には、穴1a、穴1bの内部に検出すべき異物Fが無い場合に相当する。
【0083】
また、所定の閾値を基に2値化を行うことで、輝度の差ではなく、画像の鮮鋭度(焦点の変化による画像のグレー領域の度合い)に基づく走査位置の評価を行なうことができるため、複数の走査画像Is間の輝度Asの差の度合いに比較して画像の鮮鋭度の度合いの差が大きい場合には、より有効に被検査画像を選択することができる。
【0084】
なお、本発明は、上述した実施形態に限定されず、上述した実施形態に種々の変更や改良などを加えることが可能である。
次に、変形例1に係る穴の内部検査装置および検査方法について説明する。なお、説明にあたり、上述した実施形態と同一の構成部位については、同一の符号を使用し、重複する説明は省略する。
【0085】
(変形例1)
実施形態2では、走査画像Isを構成する複数の画素の輝度Apの値を2値化して得られる2値化走査画像を利用することにより被検査画像を選択したが、本変形例では、各画素が持つ輝度Apの輝度勾配θの度合いに基づき被検査画像を選択することを特徴としている。
【0086】
図9(a)〜(d)は、走査画像の輝度勾配θを説明する図である。
図9(a)は、図5(a)と同じ図である。
図9(b)は、図9(a)のX‐X′上の画素に分布する輝度Apの例を示すグラフである。
図9(c)は、図5(c)と同じ図である。
図9(d)は、図9(c)のX‐X′上の画素に分布する輝度Apの例を示すグラフである。
図9(b)、(d)のグラフにおける輝度Apの傾きθ1、θ2は、それぞれ異物Fの陰影境界付近の輝度勾配θを表している。
【0087】
異物Fに焦点が合うほど、輝度勾配θの値が高くなる。つまり、穴1内部の異物Fの位置は、まず、走査位置L1〜L9の各位置における走査画像Is1〜Is9を取得し、次にそれぞれの輝度勾配θを比較して、最も輝度Asが小さくなる位置として求めることができる。次に、その位置における走査画像Isを解析することで異物Fの判定を行う。具体的には、実施形態1において輝度Asを求めたステップS5において、輝度Asに代わり輝度勾配θを求め、実施形態1において最も小さな輝度を示す走査位置の走査画像Isを被検査画像として選択するステップS8に代わり、最も大きな輝度勾配を示す走査位置の走査画像Isを被検査画像として選択することで、同様に検査を行うことができる。
【0088】
本変形例による穴の内部検査装置および検査方法によれば、走査画像Is内における輝度Apの分布情報としての輝度勾配θの度合いに基づき被検査画像を選択する。そのため、複数の走査画像Is間の輝度Asの差の度合いに比較して複数の走査画像Is間の輝度勾配θの度合いの差が大きい場合には、より有効に被検査画像を選択することができる。
【0089】
(変形例2)
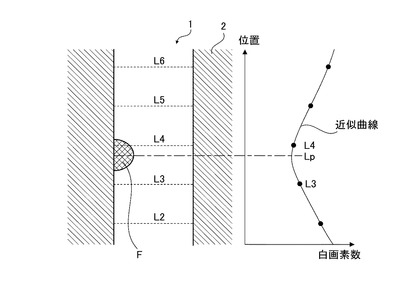
実施形態2では、走査画像Isを構成する複数の画素の輝度Apの値を2値化して得られる2値化走査画像を生成し、それぞれの2値化走査画像の白画素数が最も少なくなる走査位置Lnを選択したが、本変形例では、2値化走査画像の白画素数の分布のピーク点を求めて走査位置を求めることを特徴としている。
【0090】
図10は、図6(a)、(b)の異物F周辺を拡大した図である。
実施形態2では、図6に示すように、異物Fの付近において走査位置L3とL4とが比較され、より白画素数の少ない走査位置L4が選択される。しかし、実際の異物Fの中心位置は、走査位置L4とのズレがある。
そこで、複数の2値化走査画像に分布する白画素数を、穴1の内部の走査位置との二次関数で近似し、二次関数における白画素の値が最小となる走査位置を最適の走査位置として求める。具体的には、図6に示す二次関数で近似した近似曲線のLpの位置が、最適な位置として求められる。この最適な走査位置に対して改めて走査画像を撮像し被検査画像とする。
【0091】
本変形例によれば、以下の効果を得ることができる。
穴1の一方の端から他方の端まで走査して得られる複数の走査画像Isを基に得られる白画素数の情報が離散データであるのに対して、この離散データを二次関数により近似している。そのため、白画素の数が最小となる走査位置をより精度良く求めることができる。この最適な走査位置に対して改めて走査画像を撮像し被検査画像とすることで、穴の内部の異物検査などにおいて、異物のある部分に、より一層近い部分の検査を行うことができる。また、同じ走査位置精度で検査を行う場合においては、走査する間隔をより大きくすることが可能となるため、走査により複数の走査画像を取得する時間を短縮することが可能となる。
【符号の説明】
【0092】
1…穴、2…被検査物、10…カメラ、11…撮像素子、12…光学系、13…カメラ制御部、14…ADC回路、20…光源、30…制御部、31…CPU、32…画像処理部、40…検査ステージ、41…ステージ駆動機構、100…検査装置。
【技術分野】
【0001】
本発明は、穴の内部検査装置、検査方法、およびプログラムに関する。
【背景技術】
【0002】
従来、加工製品に形成された穴の内部を検査する方法として、例えば、特許文献1に記載されているように、穴の内部に照明用のプローブを挿入し、穴側面からの反射光をCCD(Charge Coupled Device)カメラなどで画像記録し、その画像を処理することにより検査する方法が知られていた。
また、例えば、特許文献2に記載されているように、穴の内部にプローブや検査ヘッドなどを挿入することなく、視野角の大きな広角レンズを用いたカメラで穴の内部表面を撮像し、得られた画像を処理することにより検査する方法が知られていた。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−257979号公報
【特許文献2】特開2011−89826号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の検査方法では、検査対象の穴径が数百ミクロン以下の場合には、微細なプローブを作り、精度良く穴に挿入する必要があるなど、簡便に検査することが困難であるという課題があった。
また、特許文献2に記載の検査方法では、得られた画像の座標系の変換処理や、遠近補正処理、ゆがみ補正処理などの多くの画像処理を必要としたため、検査時間が長くなってしまうという課題があった。
【課題を解決するための手段】
【0005】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の適用例または形態として実現することが可能である。
【0006】
[適用例1]本適用例に係る穴の内部検査装置は、被検査物を撮像し、被検査物の画像を取得する撮像手段と、撮像手段に対向して設けられた光源と、撮像手段が取得した画像を処理する画像処理手段と、を備え、撮像手段は、撮像手段と光源との間に置かれた被検査物に貫通して形成された穴の内部を、光源から照射される光によって得られる画像によって穴の一方の端から他方の端までを所定の間隔で走査することで複数の走査画像を取得し、画像処理手段は、複数の走査画像に分布する輝度の情報に基づいて、複数の走査画像の中から被検査画像を選択し、被検査画像に対して画像処理を行うことで所望の検査を行うことを特徴とする。
【0007】
本適用例によれば、光源から照射される光によって得られる画像によって穴の一方の端から他方の端までを所定の間隔で走査することで得られた画像を基に検査を行う。そのため、穴の内部に照明用のプローブを挿入する必要が無く、検査対象の穴径が数百ミクロン以下の場合であっても、簡便に検査を行うことができる。また、穴の一方の端から他方の端まで走査することで得られた複数の走査画像のすべてに対して検査に必要な画像処理を行うのではなく、選択された被検査画像に対して画像処理を行うことで所望の検査を行う。そのため、画像処理を行う頻度が少なくなり、検査時間を短縮することができる。
従って、本適用例によれば、検査対象の穴径が数百ミクロン以下であっても穴の内部を簡便に、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0008】
[適用例2]上記適用例に係る穴の内部検査装置において、画像処理手段は、複数の走査画像の中から、最も輝度の低い走査画像を選択して被検査画像とすることを特徴とする。
【0009】
本適用例によれば、穴の内部の異物検査などにおいて、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、より精度の高い検査を行うために必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0010】
[適用例3]上記適用例に係る穴の内部検査装置において、画像処理手段は、複数の走査画像のそれぞれを構成する複数の画素の輝度を参照し、複数の走査画像の中から、所定の値を上回る輝度の画素の数が最も少ない走査画像を選択して被検査画像とすることを特徴とする。
【0011】
本適用例によれば、穴の内部の異物検査などにおいて、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、より精度の高い検査を行うために必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0012】
[適用例4]上記適用例に係る穴の内部検査装置において、複数の走査画像のそれぞれには、被検査物に貫通して形成された複数の穴の内部が同時に撮像された画像が含まれ、画像処理手段は、同時に撮像されたそれぞれの穴の内部の画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、複数の走査画像の中から、輝度の差の合計値が最も大きい走査画像を選択して被検査画像とすることを特徴とする。
【0013】
本適用例によれば、穴の内部の異物検査などにおいて、複数の穴を同時に検査することが可能であり、また、一部の穴に異物が検出された場合には、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0014】
[適用例5]上記適用例に係る穴の内部検査装置において、複数の走査画像のそれぞれには、被検査物に貫通して形成された複数の穴の内部が同時に撮像された画像が含まれ、画像処理手段は、同時に撮像されたそれぞれの穴の内部の画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、複数の走査画像の中から、輝度の差が所定の値を上回る画素の数が最も大きい走査画像を選択して被検査画像とすることを特徴とする。
【0015】
本適用例によれば、穴の内部の異物検査などにおいて、複数の穴を同時に検査することが可能であり、また、一部の穴に異物が検出された場合には、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0016】
[適用例6]上記適用例に係る穴の内部検査装置において、画像処理手段は、複数の走査画像のそれぞれを構成する複数の画素を、それぞれの画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、複数の2値化走査画像における白画素の数を比較し、白画素の数が最も少ない2値化走査画像が生成された走査位置の走査画像を被検査画像とすることを特徴とする。
【0017】
本適用例によれば、複数の走査画像のそれぞれを構成する複数の画素を、それぞれの画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、焦点の合っていない異物表面部分の画素を白画素に置き換えることができる。次に、その白画素の数を比較し、白画素の数が最も少ない2値化走査画像を選択することで、最も焦点が合っている走査位置の画像が選択される。そのため、白画素の数が最も少ない2値化走査画像が生成された走査位置の走査画像(2値化前の画像)を被検査画像とすることで、最も焦点の合っている走査画像を用いて検査を行うことになり、穴の内部の異物検査などにおいて、より精度の高い検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少ない、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0018】
[適用例7]上記適用例に係る穴の内部検査装置において、複数の走査画像のそれぞれには、被検査物に貫通して形成された複数の穴の内部が同時に撮像された画像が含まれ、画像処理手段は、複数の走査画像のそれぞれを構成する複数の画素を、それぞれの画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、複数の走査画像の中から、同時に撮像された複数の穴の白画素の数の差が最も大きい2値化走査画像が生成された走査位置の走査画像を選択して被検査画像とすることを特徴とする。
【0019】
本適用例によれば、穴の内部の異物検査などにおいて、複数の穴を同時に検査することが可能であり、また、一部の穴に異物が検出された場合には、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0020】
[適用例8]本適用例に係る穴の内部検査方法は、撮像手段と光源との間に置かれた被検査物に貫通して形成された穴の内部を、光源から照射される光によって得られる撮像画像を処理することで検査する方法であって、撮像手段によって、穴の一方の端から他方の端までを所定の間隔で走査することで複数の走査画像を取得する走査ステップと、複数の走査画像に分布する輝度の情報に基づいて、複数の走査画像の中から被検査画像を選択する選択ステップと、被検査画像に対して画像処理を行い所望の検査をする検査ステップと、を含むことを特徴とする。
【0021】
本適用例によれば、光源から照射される光によって得られる画像によって穴の一方の端から他方の端までを所定の間隔で走査することで得られた画像を基に検査を行う。そのため、穴の内部に照明用のプローブを挿入する必要が無く、検査対象の穴径が数百ミクロン以下の場合であっても、簡便に検査を行うことができる。また、穴の一方の端から他方の端まで走査することで得られた複数の走査画像のすべてに対して検査に必要な画像処理を行うのではなく、選択された被検査画像に対して画像処理を行うことで所望の検査を行う。そのため、画像処理を行う頻度が少なくなり、検査時間を短縮することができる。
従って、本適用例によれば、検査対象の穴径が数百ミクロン以下であっても穴の内部を簡便に、短時間で検査することが可能な検査方法を提供することができる。
【0022】
[適用例9]上記適用例に係る穴の内部検査方法において、選択ステップは、複数の走査画像の中から最も輝度の低い走査画像を選択して被検査画像とすることを特徴とする。
【0023】
本適用例によれば、穴の内部の異物検査などにおいて、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、より精度の高い検査を行うために必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な検査方法を提供することができる。
【0024】
[適用例10]上記適用例に係る穴の内部検査方法において、選択ステップは、複数の走査画像のそれぞれを構成する複数の画素の輝度を参照し、複数の走査画像の中から、所定の値を上回る輝度の画素の数が最も少ない走査画像を選択して被検査画像とすることを特徴とする。
【0025】
本適用例によれば、穴の内部の異物検査などにおいて、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、より精度の高い検査を行うために必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な検査方法を提供することができる。
【0026】
[適用例11]上記適用例に係る穴の内部検査方法において、走査ステップは、複数の走査画像のそれぞれに、被検査物に貫通して形成された複数の穴の内部が同時に含まれるように撮像し、選択ステップは、同時に撮像されたそれぞれの穴の内部の画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、複数の走査画像の中から、輝度の差の合計値が最も大きい走査画像を選択することを特徴とする。
【0027】
本適用例によれば、穴の内部の異物検査などにおいて、複数の穴を同時に検査することが可能であり、また、一部の穴に異物が検出された場合には、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な検査方法を提供することができる。
【0028】
[適用例12]上記適用例に係る穴の内部検査方法において、走査ステップは、複数の走査画像のそれぞれに、被検査物に貫通して形成された複数の穴の内部が同時に含まれるように撮像し、選択ステップは、同時に撮像されたそれぞれの穴の内部の画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、複数の走査画像の中から、輝度の差が所定の値を上回る画素の数が最も大きい走査画像を選択することを特徴とする。
【0029】
本適用例によれば、穴の内部の異物検査などにおいて、複数の穴を同時に検査することが可能であり、また、一部の穴に異物が検出された場合には、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な検査方法を提供することができる。
【0030】
[適用例13]上記適用例に係る穴の内部検査方法において、選択ステップは、複数の走査画像のそれぞれを構成する複数の画素を、それぞれの画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、複数の2値化走査画像における白画素の数を比較し、白画素の数が最も少ない2値化走査画像が生成された走査位置の走査画像を被検査画像として選択することを特徴とする。
【0031】
本適用例によれば、複数の走査画像のそれぞれを構成する複数の画素を、それぞれの画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、焦点の合っていない異物表面部分の画素を白画素に置き換えることができる。次に、その白画素の数を比較し、白画素の数が最も少ない2値化走査画像を選択することで、最も焦点が合っている走査位置の画像が選択される。そのため、白画素の数が最も少ない2値化走査画像が生成された走査位置の走査画像(2値化前の画像)を被検査画像とすることで、最も焦点の合っている走査画像を用いて検査を行うことになり、穴の内部の異物検査などにおいて、より精度の高い検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少ない、短時間で検査することが可能な検査方法を提供することができる。
【0032】
[適用例14]上記適用例に係る穴の内部検査方法において、走査ステップは、複数の走査画像のそれぞれに、被検査物に貫通して形成された複数の穴の内部が同時に含まれるように撮像し、選択ステップは、複数の走査画像のそれぞれを構成する複数の画素を、それぞれの画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、複数の走査画像の中から、同時に撮像された複数の穴の白画素の数の差が最も大きい2値化走査画像が生成された走査位置の走査画像を選択して被検査画像とすることを特徴とする。
【0033】
本適用例によれば、穴の内部の異物検査などにおいて、複数の穴を同時に検査することが可能であり、また、一部の穴に異物が検出された場合には、異物のある部分により近い部分の被検査画像を選択して検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な検査方法を提供することができる。
【0034】
[適用例15]本適用例に係るプログラムは、穴の内部検査装置を、上記に記載の穴の内部検査方法を含み機能させることを特徴とする。
【0035】
本適用例によれば、上記に記載の穴の内部検査方法を含み機能させるプログラムを用いることで、穴の内部を簡便に、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【図面の簡単な説明】
【0036】
【図1】実施形態1に係る穴の内部検査装置としての検査装置の概略図。
【図2】(a)被検査物2に貫通する穴1の側断面図、(b)穴1の側断面図に示す位置に対応する走査画像Isの例を示す説明図。
【図3】(a)穴1の側断面図、(b)穴1の側断面図に示す走査位置に対応する走査画像Isの輝度分布のグラフ。
【図4】穴の内部検査方法を説明するフローチャート。
【図5】(a)〜(e)走査画像の2値化に関する説明図。
【図6】(a)穴1の側断面図、(b)穴1の側断面図に示す走査位置に対応する2値化走査画像の白画素数の分布のグラフ。
【図7】(a)穴1a、1bの側断面図、(b)実施形態3に係る走査画像Isの説明図、(c)穴の輝度の差の分布を示すグラフ。
【図8】(a)穴1a、1bの側断面図、(b)実施形態4に係る走査画像Isの説明図、(c)2値化走査画像におけるそれぞれの穴の白画素数の分布を示すグラフ、(d)2値化走査画像におけるそれぞれの穴の白画素数の差の分布を示すグラフ。
【図9】(a)〜(d)変形例1に係る輝度勾配θの説明図。
【図10】変形例2に係る、図6(a)、(b)の部分拡大図。
【発明を実施するための形態】
【0037】
以下に本発明を具体化した実施形態について、図面を参照して説明する。以下は、本発明の一実施形態であって、本発明を限定するものではない。なお、以下の各図においては、説明を分かりやすくするため、実際とは異なる尺度で記載している場合がある。
【0038】
(実施形態1)
まず、実施形態1に係る穴の内部検査装置および検査方法について説明する。
図1は、実施形態1に係る穴の内部検査装置としての検査装置100の概略図である。
検査装置100は、穴の内部の異物検査などを主な目的とするものであり、撮像手段としてのカメラ10と、光源20、制御部30、検査ステージ40などから構成されている。
【0039】
カメラ10は、略鉛直方向を向くように設置され、必要な間隔を置いて配置された検査ステージ40を挟んで光源20と対向している。
検査ステージ40には、検査対象の穴1が貫通して形成された被検査物2が載置される。光源20から照射される光が穴1を通過してカメラ10に捉えられ、カメラ10が捉えた光によって生成された画像を制御部30で処理することにより穴1の内部の検査が行われる。
【0040】
カメラ10は、撮像素子11、光学系12、カメラ制御部13、ADC(Analog to Digital Converter)回路14などから構成される。撮像素子11は、CCD型やCMOS(Complementary Metal Oxide Semiconductor)型などのイメージセンサーであり、光学系12を通して受光した光をカメラ制御部13の制御の下に処理して画像として取り込む。取り込まれた画像は、走査画像IsとしてADC回路14から出力される。走査画像Isは、撮像素子11を構成する複数の画素のそれぞれが受光した輝度情報などから構成される。
【0041】
制御部30は、CPU(Central Processing Unit)31、画像処理部32などによって構成される。
CPU31は、所定のプログラムによりカメラ10、光源20、検査ステージ40、画像処理部32などの制御を行う。
画像処理部32は、画像処理手段としての機能を有し、カメラ10が捉えた走査画像Isの画像処理を行うことで、検査および判定を行う。
【0042】
検査ステージ40は、被検査物2を略水平に載置するテーブルであり、ステージ駆動機構41を備えている。ステージ駆動機構41は、CPU31の制御の基に、検査ステージ40を水平方向および鉛直方向に移動させ、所望の位置に被検査物2を位置させる機能を有している。
【0043】
次に、検査装置100による穴の内部検査の方法について説明する。
図2(a)は、被検査物2に貫通する穴1の側断面図、図2(b)は、穴1の側断面図に示す位置に対応する走査画像Isの例を示す図である。側断面図における下方向は鉛直方向を意味しており、穴1内の中間よりやや下方に異物Fが存在する様子を表している。
【0044】
穴1内部の異物Fの有無の検査は、異物Fの大きさに対して所定の閾値を設け、その閾値を越える異物Fが検出された場合に、異物Fが有ると判定する。
異物Fの大きさの検出は画像処理により行い、検査装置100の場合には、穴1を通過する光を遮る異物Fの陰の大きさにより判定を行っている。具体的には、カメラ10が捉えた穴1の断面形状(異物Fの陰も含めた形状)に内接する円の最小径を測定し、設定した閾値と比較することで判定を行っているが、この方法に限定するものではない。
【0045】
穴1の断面形状を画像として捉えるために、穴1の下部から照射される光源20の光を穴1の上部に設置されるカメラ10により撮像する。精度の高い検査を実現するためには、画像処理により穴1の断面形状を正確に取得することが必要である。つまり、被検査物2の厚みに対して、光学系12の被写界深度が浅い場合には、異物Fの位置に焦点を合わせた画像を取得する必要があり、穴1の内部における異物Fの位置は、一定しないため、異物Fの位置を特定し、焦点を合わせるための処理を行っている。その方法について以下に具体的に説明する。
【0046】
図2(a)においてL1〜L9(以下、走査位置Ln、n=1〜9)は、穴1の下端から上端までを等間隔に8等分した高さを示している。
図2(b)は、カメラ10が捉えた走査画像Is(穴1の断面画像)の内、走査位置L1、L4、L9のそれぞれに焦点を合わせた時の走査画像Isのイメージ図である。焦点位置を移動させる方法は、光学系12の焦点距離を固定し、光学系12の焦点位置に合うように検査ステージ40を上下させることにより行っている。
【0047】
図2(b)に示すように、異物Fの位置に略焦点が合った画像(走査位置L4付近の画像)に対して、検査ステージ40を上下させて撮像した穴1の下端(走査位置L1)や上端(走査位置L9)に焦点が合った画像では、異物Fを鮮明に捉えることができず、走査画像Isに占める異物Fの陰影部分の面積が小さくなった画像が得られる。つまり、異物Fの大きさを正確に捉え、正確な判定を行うには、まず、穴1内部の異物Fの位置を特定する必要がある。
【0048】
図3(a)は、穴1の側断面図、図3(b)は、穴1の側断面図に示す走査位置に対応する走査画像Isの輝度分布のグラフである。
穴1内部の異物Fの位置を特定する方法として、本実施形態では、カメラ10が捉える走査画像Isの総合輝度の値(以下輝度As)の分布を解析することによって行っている。以下に具体的に説明する。
【0049】
走査画像Isの輝度Asは、穴1のそれぞれの走査位置Lnの面を横切り、かつ光学系12を通過して撮像素子11に入射する光の量である。穴1を通過する光のうち、穴1の軸方向との平行成分以外の光成分(具体的には、例えば穴1の内径より広い範囲から入射し、穴1の内壁に反射して撮像素子11に入射する光や、異物Fの表面を反射する光など)により、カメラ10と異物Fとの相対位置が変化すると、撮像素子11に入射する光の量が変化する。その結果、走査位置Lnの各位置で捉えられる走査画像Is(以下、走査画像Isn、n=1〜9)の輝度As(Asn、n=1〜9)の分布は、図3(b)に示すように異物Fの位置の輝度Asが最も小さくなるような分布となる。
【0050】
つまり、穴1内部の異物Fの位置は、まず、走査位置L1〜L9の各位置における走査画像Is1〜Is9を取得し、次にそれぞれの輝度As1〜As9を比較して、最も輝度Asが小さくなる位置として求めることができる。次に、その位置における走査画像Isを解析(画像処理)することで異物Fの検査・判定を行う。
【0051】
図4に、本実施形態における穴の内部検査のフローチャートを示す。本フローチャートに従い、上述した方法を具体的に説明する。なお、検査装置100は、本フローチャートに従った穴の内部検査方法を含み検査装置100を機能させるプログラムを備えている。
【0052】
まず、被検査物2を検査ステージ40(図1)にセットする(ステップS1)。
次に、検査ステージ40の位置を調整し、光学系12の下に検査対象としての被検査物2の穴1を移動させる(ステップS2)。
次に、光学系12および検査ステージ40の高さ調整により、光学系12の焦点を走査位置L1に合わせる(ステップS3)。
次に、カメラ10により、走査位置L1を撮像し、走査画像Is1を取得する(ステップS4)。
次に、画像処理部32において走査画像Is1から走査位置L1の輝度As1を求める(ステップS5)。輝度As1は、走査画像Is1を構成する各画素の持つ輝度(以下輝度Ap)の値を総計することで得られる。
引き続き、走査位置L2からL9まで同様に走査画像Is2〜Is9を取得して対応するそれぞれの輝度Asnを求める(ステップS6、S7)。
ステップS3〜ステップS7までが走査ステップとなる。
【0053】
次に、選択ステップとして、走査位置L1〜L9の各位置で求められた輝度As1〜As9を比較し、最も小さな輝度を示す走査位置の走査画像Isを被検査画像として選択する(ステップS8)。
次に、検査ステップとして、被検査画像に対して所望の画像処理を行い検査・判定を行う(ステップS9)。
被検査物2に複数の穴1がある場合には、すべての穴1の検査が完了したか確認し(ステップS10)、完了した場合には、検査を終了する。完了していない場合には、別の穴1にシフトしてステップS2から繰り返す。
以上のフローにより、簡便に穴1の内部の検査を行うことができる。
【0054】
なお、本実施形態においては、穴1の下端から上端までを等間隔に8等分し、走査位置をL1〜L9として説明したが、これに限定するものではなく、被検査物2の厚みや、判定する異物Fの大きさ、検査精度などに応じ、適宜設定することが好ましい。
【0055】
以上述べたように、本実施形態による穴の内部検査装置、検査方法およびこの検査方法を含み機能させるプログラムによれば、以下の効果を得ることができる。
【0056】
光源20から照射される光によって得られる画像によって穴1の一方の端から他方の端までを所定の間隔で走査することで得られた走査画像Isを基に検査を行う。そのため、穴1の内部に照明用のプローブを挿入する必要が無く、検査対照の穴径が数百ミクロン以下の場合であっても、簡便に検査を行うことができる。また、穴1の一方の端から他方の端まで走査することで得られた複数の走査画像Isnのすべてに対して検査に必要な画像処理を行うのではなく、選択された被検査画像に対して画像処理を行うことで所望の検査を行う。そのため、検査のための時間を要する画像処理を行う頻度が少なくなり、検査時間を短縮することができる。
その結果、検査対象の穴径が数百ミクロン以下であっても穴の内部を簡便に、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0057】
(実施形態2)
次に、実施形態2に係る穴の内部検査装置および検査方法について説明する。なお、説明にあたり、上述した実施形態と同一の構成部位については、同一の符号を使用し、重複する説明は省略する。
【0058】
実施形態1では、穴1内部の異物Fの位置を求める方法として、まず、走査位置L1〜L9の各位置における走査画像Is1〜Is9を取得し、次にそれぞれの輝度As1〜As9を比較して、最も輝度Asが小さくなる位置として求めていた。これに対し、本実施形態では、直接、走査画像Is1〜Is9のそれぞれが持つ輝度の値を比較するのではなく、走査画像Is1〜Is9を一旦黒画素と白画素とに2値化して、白画素の数を比較し、最も白画素の数が少なくなる位置を穴1内部の異物Fの位置として求めることを特徴としている。
【0059】
図5(a)〜(f)は、走査画像Isの2値化を説明する図である。
図5(a)は、異物Fに焦点の合っていない走査画像Isを示す図であり、図2(a)、(b)における走査位置L1やL9などに対応する走査画像Isである。焦点が合っていない部分は、図示するDに示すようなグレー領域として画像が形成される。
図5(b)は、図5(a)のX‐X′上の画素に分布する輝度Apの例を示すグラフである。穴1の外側の部分は、輝度Apが略0の黒領域であり、穴1の中央部分の輝度Apが例えば255のレベルであることを示している。異物Fの周辺の焦点が合っていない部分(Dの領域)は、輝度Apが略0から255までのグレーな遷移領域であることを示している。
図5(c)は、異物Fに略焦点の合っている走査画像Isを示す図であり、図2(a)、(b)における走査位置L4付近に対応する走査画像Isである。異物Fの周辺の焦点が合っていない部分(Dの領域)は、図5(c)に示すように図5(a)に比較して僅かになっている。
【0060】
次に、2値化について具体的に説明する。
本実施形態における2値化とは、略0から255までのグレーな遷移領域に分布する輝度の値を、0と255とに2分類することである。例えば、閾値として輝度64を設定し、0を上回り64までの輝度をすべて0とし、64を上回り255までの輝度を255とする。すると、輝度Apの分布は、図5(b)、(d)の破線に示すようになり、また、走査画像Isは、それぞれ図5(e)、(f)に示すような黒画像と白画素で構成される画像(2値化走査画像)になる。
【0061】
図6(a)は、穴1の側断面図、図6(b)は、穴1の側断面図に示す走査位置に対応する2値化走査画像の白画素数の分布図である。
2値化を行うことにより、図6(b)のグラフに示されるように、異物Fに焦点が合うほど、白画素数が少なくなる。つまり、穴1内部の異物Fの位置は、まず、走査位置L1〜L9の各位置における走査画像Is1〜Is9を取得し、次にそれぞれの2値化走査画像を生成し、それぞれの2値化走査画像の白画素数を比較して、最も白画素数が少なくなる位置として求めることができる。次に、その位置における走査画像Isを解析(画像処理)することで異物Fの検査・判定を行う。
【0062】
具体的な検査方法としては、実施形態1において輝度Asを求めたステップS5において、輝度Asに代わり上述したように白画素の数を求め、また、実施形態1において最も小さな輝度を示す走査位置の走査画像Isを被検査画像として選択するステップS8に代わり、最も少ない白画素の数を示す走査位置の走査画像Isを被検査画像として選択することで、同様に検査を行うことができる。
【0063】
なお、上記の説明では、一旦、走査画像Isを2値化走査画像に変換し、白画素の数を数えるとして説明したが、走査画像Isを構成する個々の画素の輝度を参照し、輝度64を上回る画素の数を数える方法であっても良い。つまり、所定の閾値を設定し、その値を上回る輝度の画素の数が最も少ない走査位置の走査画像Isを選択して被検査画像とする方法であっても良い。
【0064】
また、最も少ない白画素数が所定の数を上回っている場合、あるいは輝度64以下の画素の数の最大値が所定の数を下回っている場合には、被検査画像を選択することなく、検査対象とする穴1の検査を完了しても良い。具体的には、穴1の内部に検出すべき異物Fが無い場合に相当する。
【0065】
以上述べたように、本実施形態による穴の内部検査装置、検査方法およびこの検査方法を含み機能させるプログラムによれば、以下の効果を得ることができる。
【0066】
複数の走査画像Isのそれぞれを構成する複数の画素を、それぞれの画素が持つ輝度Apの情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、焦点の合っていない異物F表面部分の画素を白画素に置き換えることができる。次に、その白画素の数を比較し、白画素の数が最も少ない2値化走査画像を選択することで、最も焦点が合っている走査位置の画像が選択される。そのため、白画素の数が最も少ない2値化走査画像が生成された走査位置の走査画像Is(2値化前の画像)を被検査画像とすることで、最も焦点の合っている走査画像Isを用いて検査を行うことになり、穴1の内部の異物検査などにおいて、より精度の高い検査を行うことができる。
【0067】
また、所定の閾値を基に2値化を行うことで、輝度の差ではなく、画像の鮮鋭度(焦点の変化による画像のグレー領域の度合い)に基づく走査位置の評価を行なうことができるため、複数の走査画像Is間の輝度Asの差の度合いに比較して画像の鮮鋭度の度合いの差が大きい場合には、より有効に被検査画像を選択することができる。
【0068】
(実施形態3)
次に、実施形態3に係る穴の内部検査装置および検査方法について説明する。なお、説明にあたり、上述した実施形態と同一の構成部位については、同一の符号を使用し、重複する説明は省略する。
【0069】
実施形態1では、一つの穴の検査を行う方法および装置として説明したが、本実施形態は、複数の穴を比較しながら同時に検査することを特徴とする。従って、本実施形態では、複数の同じ内径の穴が形成されている被検査物の穴の内部検査を行う装置およびその検査方法として説明する。本実施形態による検査は、複数の穴のいずれかに異物が含まれるか否かなどの検査を行う場合に有効である。
【0070】
図7(a)は、穴1a、1bの側断面図、図7(b)は、本実施形態に係る走査画像Isの説明図、図7(c)は、それぞれの穴の輝度の差の分布を示すグラフである。
図7(a)、(b)に示すように、ここでは、2つの穴(穴1aおよび穴1b)の検査を同時に行う場合を説明する。図7(a)に示すように、異物Fは、穴1a内の中間よりやや下方に異物Fが存在する様子を表している。
【0071】
まず、カメラ10により、図7(b)に示すような、穴1aと穴1bが含まれる走査画像Isを取得する。
次に、穴1a内部と穴1b内部のそれぞれの画像のパターンマッチング処理により、それぞれの画像を構成する画素の対応付けを行なう。具体的には、例えば、それぞれの穴形状の重心を求め、その重心を重ねることで重なり合う画素の対応をつける方法や、あるいは、穴側面部形状(図7(b)においては円形の周形状)のパターンを重ね合わせ、重なり合う位置の画素を対応つける方法などがある。
【0072】
次に、対応する画素どうしの輝度の差を算出し、それらの値を合計する。具体的には、穴1aの一つの画素の輝度値から穴1bの対応する位置の画素の輝度値を差し引く計算を行ない、すべての画素について同様に実施した後に、その合計値を算出する。
ここで得られる輝度の差の合計値は、図7(c)のようになる。
異物Fに近い走査位置の分布ほど、輝度の差の合計値が大きくなる。つまり、穴1a内部の異物Fの位置は、最も輝度の差の合計値が大きくなる位置として求めることができる。次に、その位置における走査画像Isを解析することで異物Fの判定を行う。
【0073】
この検査方法では、差異によって異物の位置を検出しているため、同時に検査する穴の内部の同じ位置に異物Fが存在する確率が低い場合に有効である。同時に検査する穴の数が多いほど、この確率は低下するため、複数の穴の検査には有効な方法である。
【0074】
以上述べたように、本実施形態による穴の内部検査装置、検査方法およびこの検査方法を含み機能させるプログラムによれば、以下の効果を得ることができる。
穴の内部の異物検査などにおいて、複数の穴を同時に検査することが可能であり、また、一部の穴に異物が検出された場合には、異物のある部分の被検査画像を選択して検査を行うことができる。その結果、検査に必要な画像処理を行う頻度が少なくなるため、短時間で検査することが可能な穴の内部検査装置を提供することができる。
【0075】
(実施形態4)
次に、実施形態4に係る穴の内部検査装置および検査方法について説明する。なお、説明にあたり、上述した実施形態と同一の構成部位については、同一の符号を使用し、重複する説明は省略する。
【0076】
実施形態3では、複数の穴を比較しながら同時に検査する方法として、それぞれの穴の画像を構成する画素の輝度の差の合計の値の評価により、最適な走査画像Isの位置を求めるとして説明した。これに対し、本実施形態では、走査画像Isを2値化し得られた2値化走査画像におけるそれぞれの穴の画像を構成する白画素の数を比較し、その差異を評価することで最適の走査位置を求めることを特徴としている。
【0077】
図8(a)は、穴1a、1bの側断面図、図8(b)は、本実施形態に係る走査画像Isの説明図、図8(c)は、2値化走査画像におけるそれぞれの穴の白画素数の分布を示すグラフ、図8(d)は、2値化走査画像におけるそれぞれの穴の白画素数の差の分布を示すグラフである。
図8(a)、(b)に示すように、ここでは、2つの穴(穴1aおよび穴1b)の検査を同時に行う場合を説明する。図8(a)に示すように、異物Fは、穴1a内の中間よりやや下方に異物Fが存在する様子を表している。
【0078】
まず、カメラ10により、図8(b)に示すような、穴1aと穴1bが含まれる走査画像Isを取得する。
次に、実施形態2の場合と同様に、2値化走査画像を生成する。
ここで得られる2値化走査画像における穴1a、穴1bそれぞれの白画素数の分布は、図8(c)のようになる。穴1aの白画素数の分布は、図6(b)と同様であり、穴1bの分布は、異物Fが無いため、略直線となる。
次に、2値化走査画像における穴1aと穴1bのそれぞれを構成する白画素の数を比較し、その差異を算出する。その差異の分布は、図8(d)に示すようになる。
【0079】
異物Fに近い走査位置の分布ほど、白画素数の差異が大きくなる。つまり、穴1a内部の異物Fの位置は、最も白画素数の差異が大きくなる位置として求めることができる。次に、その位置における走査画像Isを解析(画像処理)することで異物Fの検査・判定を行う。この際に、異物Fの検査・判定は、異物Fの存在により白画素数の変化がより大きく確認された穴1aに対してだけ行う。
【0080】
この検査方法では、差異によって異物の位置を検出しているため、同時に検査する穴の内部の同じ位置に異物Fが存在する確率が低い場合に有効である。同時に検査する穴の数が多いほど、この確率は低下するため、複数の穴の検査には有効な方法である。
【0081】
なお、上記の説明では、一旦、走査画像Isを2値化走査画像に変換し、白画素の数を数えるとして説明したが、走査画像Isを構成する個々の画素の輝度を参照し、輝度64を上回る画素の数を数える方法であっても良い。つまり、所定の閾値を設定し、その値を上回る輝度の画素の数の数を比較し、その差異を算出して最もその差異が大きい走査位置の走査画像Isを選択して被検査画像とする方法であっても良い。
【0082】
また、最も大きい差異の値が所定の数を下回っている場合には、被検査画像を選択することなく、検査対象とする穴1の検査を完了しても良い。具体的には、穴1a、穴1bの内部に検出すべき異物Fが無い場合に相当する。
【0083】
また、所定の閾値を基に2値化を行うことで、輝度の差ではなく、画像の鮮鋭度(焦点の変化による画像のグレー領域の度合い)に基づく走査位置の評価を行なうことができるため、複数の走査画像Is間の輝度Asの差の度合いに比較して画像の鮮鋭度の度合いの差が大きい場合には、より有効に被検査画像を選択することができる。
【0084】
なお、本発明は、上述した実施形態に限定されず、上述した実施形態に種々の変更や改良などを加えることが可能である。
次に、変形例1に係る穴の内部検査装置および検査方法について説明する。なお、説明にあたり、上述した実施形態と同一の構成部位については、同一の符号を使用し、重複する説明は省略する。
【0085】
(変形例1)
実施形態2では、走査画像Isを構成する複数の画素の輝度Apの値を2値化して得られる2値化走査画像を利用することにより被検査画像を選択したが、本変形例では、各画素が持つ輝度Apの輝度勾配θの度合いに基づき被検査画像を選択することを特徴としている。
【0086】
図9(a)〜(d)は、走査画像の輝度勾配θを説明する図である。
図9(a)は、図5(a)と同じ図である。
図9(b)は、図9(a)のX‐X′上の画素に分布する輝度Apの例を示すグラフである。
図9(c)は、図5(c)と同じ図である。
図9(d)は、図9(c)のX‐X′上の画素に分布する輝度Apの例を示すグラフである。
図9(b)、(d)のグラフにおける輝度Apの傾きθ1、θ2は、それぞれ異物Fの陰影境界付近の輝度勾配θを表している。
【0087】
異物Fに焦点が合うほど、輝度勾配θの値が高くなる。つまり、穴1内部の異物Fの位置は、まず、走査位置L1〜L9の各位置における走査画像Is1〜Is9を取得し、次にそれぞれの輝度勾配θを比較して、最も輝度Asが小さくなる位置として求めることができる。次に、その位置における走査画像Isを解析することで異物Fの判定を行う。具体的には、実施形態1において輝度Asを求めたステップS5において、輝度Asに代わり輝度勾配θを求め、実施形態1において最も小さな輝度を示す走査位置の走査画像Isを被検査画像として選択するステップS8に代わり、最も大きな輝度勾配を示す走査位置の走査画像Isを被検査画像として選択することで、同様に検査を行うことができる。
【0088】
本変形例による穴の内部検査装置および検査方法によれば、走査画像Is内における輝度Apの分布情報としての輝度勾配θの度合いに基づき被検査画像を選択する。そのため、複数の走査画像Is間の輝度Asの差の度合いに比較して複数の走査画像Is間の輝度勾配θの度合いの差が大きい場合には、より有効に被検査画像を選択することができる。
【0089】
(変形例2)
実施形態2では、走査画像Isを構成する複数の画素の輝度Apの値を2値化して得られる2値化走査画像を生成し、それぞれの2値化走査画像の白画素数が最も少なくなる走査位置Lnを選択したが、本変形例では、2値化走査画像の白画素数の分布のピーク点を求めて走査位置を求めることを特徴としている。
【0090】
図10は、図6(a)、(b)の異物F周辺を拡大した図である。
実施形態2では、図6に示すように、異物Fの付近において走査位置L3とL4とが比較され、より白画素数の少ない走査位置L4が選択される。しかし、実際の異物Fの中心位置は、走査位置L4とのズレがある。
そこで、複数の2値化走査画像に分布する白画素数を、穴1の内部の走査位置との二次関数で近似し、二次関数における白画素の値が最小となる走査位置を最適の走査位置として求める。具体的には、図6に示す二次関数で近似した近似曲線のLpの位置が、最適な位置として求められる。この最適な走査位置に対して改めて走査画像を撮像し被検査画像とする。
【0091】
本変形例によれば、以下の効果を得ることができる。
穴1の一方の端から他方の端まで走査して得られる複数の走査画像Isを基に得られる白画素数の情報が離散データであるのに対して、この離散データを二次関数により近似している。そのため、白画素の数が最小となる走査位置をより精度良く求めることができる。この最適な走査位置に対して改めて走査画像を撮像し被検査画像とすることで、穴の内部の異物検査などにおいて、異物のある部分に、より一層近い部分の検査を行うことができる。また、同じ走査位置精度で検査を行う場合においては、走査する間隔をより大きくすることが可能となるため、走査により複数の走査画像を取得する時間を短縮することが可能となる。
【符号の説明】
【0092】
1…穴、2…被検査物、10…カメラ、11…撮像素子、12…光学系、13…カメラ制御部、14…ADC回路、20…光源、30…制御部、31…CPU、32…画像処理部、40…検査ステージ、41…ステージ駆動機構、100…検査装置。
【特許請求の範囲】
【請求項1】
被検査物を撮像し、前記被検査物の画像を取得する撮像手段と、
前記撮像手段に対向して設けられた光源と、
前記撮像手段が取得した画像を処理する画像処理手段と、を備え、
前記撮像手段は、前記撮像手段と前記光源との間に置かれた前記被検査物に貫通して形成された穴の内部を、前記光源から照射される光によって得られる画像によって前記穴の一方の端から他方の端までを所定の間隔で走査することで複数の走査画像を取得し、
前記画像処理手段は、前記複数の走査画像に分布する輝度の情報に基づいて、前記複数の走査画像の中から被検査画像を選択し、前記被検査画像に対して画像処理を行うことで所望の検査を行うことを特徴とする穴の内部検査装置。
【請求項2】
前記画像処理手段は、前記複数の走査画像の中から、最も輝度の低い走査画像を選択して前記被検査画像とすることを特徴とする請求項1に記載の穴の内部検査装置。
【請求項3】
前記画像処理手段は、
前記複数の走査画像のそれぞれを構成する複数の画素の輝度を参照し、
前記複数の走査画像の中から、所定の値を上回る輝度の前記画素の数が最も少ない走査画像を選択して前記被検査画像とすることを特徴とする請求項1に記載の穴の内部検査装置。
【請求項4】
前記複数の走査画像のそれぞれには、前記被検査物に貫通して形成された複数の穴の内部が同時に撮像された画像が含まれ、
前記画像処理手段は、
同時に撮像されたそれぞれの前記穴の内部の前記画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、
前記複数の走査画像の中から、前記輝度の差の合計値が最も大きい走査画像を選択して前記被検査画像とすることを特徴とする請求項1に記載の穴の内部検査装置。
【請求項5】
前記複数の走査画像のそれぞれには、前記被検査物に貫通して形成された複数の穴の内部が同時に撮像された画像が含まれ、
前記画像処理手段は、
同時に撮像されたそれぞれの前記穴の内部の前記画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、
前記複数の走査画像の中から、前記輝度の差が所定の値を上回る前記画素の数が最も大きい走査画像を選択して前記被検査画像とすることを特徴とする請求項1に記載の穴の内部検査装置。
【請求項6】
前記画像処理手段は、
前記複数の走査画像のそれぞれを構成する複数の画素を、それぞれの前記画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、
前記複数の2値化走査画像における前記白画素の数を比較し、
前記白画素の数が最も少ない前記2値化走査画像が生成された前記走査位置の前記走査画像を前記被検査画像とすることを特徴とする請求項1に記載の穴の内部検査装置。
【請求項7】
前記複数の走査画像のそれぞれには、前記被検査物に貫通して形成された複数の穴の内部が同時に撮像された画像が含まれ、
前記画像処理手段は、
前記複数の走査画像のそれぞれを構成する複数の画素を、それぞれの前記画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、
前記複数の走査画像の中から、同時に撮像された前記複数の穴の前記白画素の数の差が最も大きい前記2値化走査画像が生成された前記走査位置の走査画像を選択して前記被検査画像とすることを特徴とする請求項1に記載の穴の内部検査装置。
【請求項8】
撮像手段と光源との間に置かれた被検査物に貫通して形成された穴の内部を、前記光源から照射される光によって得られる撮像画像を処理することで検査する方法であって、
前記撮像手段によって、前記穴の一方の端から他方の端までを所定の間隔で走査することで複数の走査画像を取得する走査ステップと、
前記複数の走査画像に分布する輝度の情報に基づいて、前記複数の走査画像の中から被検査画像を選択する選択ステップと、
前記被検査画像に対して画像処理を行い所望の検査をする検査ステップと、を含むことを特徴とする穴の内部検査方法。
【請求項9】
前記選択ステップは、前記複数の走査画像の中から最も輝度の低い走査画像を選択して前記被検査画像とすることを特徴とする請求項8に記載の穴の内部検査方法。
【請求項10】
前記選択ステップは、
前記複数の走査画像のそれぞれを構成する複数の画素の輝度を参照し、
前記複数の走査画像の中から、所定の値を上回る輝度の前記画素の数が最も少ない走査画像を選択して前記被検査画像とすることを特徴とする請求項8に記載の穴の内部検査方法。
【請求項11】
前記走査ステップは、前記複数の走査画像のそれぞれに、前記被検査物に貫通して形成された複数の穴の内部が同時に含まれるように撮像し、
前記選択ステップは、
同時に撮像されたそれぞれの前記穴の内部の前記画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、
前記複数の走査画像の中から、前記輝度の差の合計値が最も大きい走査画像を選択することを特徴とする請求項8に記載の穴の内部検査方法。
【請求項12】
前記走査ステップは、前記複数の走査画像のそれぞれに、前記被検査物に貫通して形成された複数の穴の内部が同時に含まれるように撮像し、
前記選択ステップは、
同時に撮像されたそれぞれの前記穴の内部の前記画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、
前記複数の走査画像の中から、前記輝度の差が所定の値を上回る前記画素の数が最も大きい走査画像を選択することを特徴とする請求項8に記載の穴の内部検査方法。
【請求項13】
前記選択ステップは、
前記複数の走査画像のそれぞれを構成する複数の画素を、それぞれの前記画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、
前記複数の2値化走査画像における前記白画素の数を比較し、
前記白画素の数が最も少ない前記2値化走査画像が生成された前記走査位置の前記走査画像を前記被検査画像として選択することを特徴とする請求項8に記載の穴の内部検査方法。
【請求項14】
前記走査ステップは、
前記複数の走査画像のそれぞれに、前記被検査物に貫通して形成された複数の穴の内部が同時に含まれるように撮像し、
前記選択ステップは、
前記複数の走査画像のそれぞれを構成する複数の画素を、それぞれの前記画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、
前記複数の走査画像の中から、同時に撮像された前記複数の穴の前記白画素の数の差が最も大きい前記2値化走査画像が生成された前記走査位置の走査画像を選択して前記被検査画像とすることを特徴とする請求項8に記載の穴の内部検査方法。
【請求項15】
穴の内部検査装置を、請求項8ないし請求項14のいずれか一項に記載の穴の内部検査方法を含み機能させることを特徴とするプログラム。
【請求項1】
被検査物を撮像し、前記被検査物の画像を取得する撮像手段と、
前記撮像手段に対向して設けられた光源と、
前記撮像手段が取得した画像を処理する画像処理手段と、を備え、
前記撮像手段は、前記撮像手段と前記光源との間に置かれた前記被検査物に貫通して形成された穴の内部を、前記光源から照射される光によって得られる画像によって前記穴の一方の端から他方の端までを所定の間隔で走査することで複数の走査画像を取得し、
前記画像処理手段は、前記複数の走査画像に分布する輝度の情報に基づいて、前記複数の走査画像の中から被検査画像を選択し、前記被検査画像に対して画像処理を行うことで所望の検査を行うことを特徴とする穴の内部検査装置。
【請求項2】
前記画像処理手段は、前記複数の走査画像の中から、最も輝度の低い走査画像を選択して前記被検査画像とすることを特徴とする請求項1に記載の穴の内部検査装置。
【請求項3】
前記画像処理手段は、
前記複数の走査画像のそれぞれを構成する複数の画素の輝度を参照し、
前記複数の走査画像の中から、所定の値を上回る輝度の前記画素の数が最も少ない走査画像を選択して前記被検査画像とすることを特徴とする請求項1に記載の穴の内部検査装置。
【請求項4】
前記複数の走査画像のそれぞれには、前記被検査物に貫通して形成された複数の穴の内部が同時に撮像された画像が含まれ、
前記画像処理手段は、
同時に撮像されたそれぞれの前記穴の内部の前記画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、
前記複数の走査画像の中から、前記輝度の差の合計値が最も大きい走査画像を選択して前記被検査画像とすることを特徴とする請求項1に記載の穴の内部検査装置。
【請求項5】
前記複数の走査画像のそれぞれには、前記被検査物に貫通して形成された複数の穴の内部が同時に撮像された画像が含まれ、
前記画像処理手段は、
同時に撮像されたそれぞれの前記穴の内部の前記画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、
前記複数の走査画像の中から、前記輝度の差が所定の値を上回る前記画素の数が最も大きい走査画像を選択して前記被検査画像とすることを特徴とする請求項1に記載の穴の内部検査装置。
【請求項6】
前記画像処理手段は、
前記複数の走査画像のそれぞれを構成する複数の画素を、それぞれの前記画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、
前記複数の2値化走査画像における前記白画素の数を比較し、
前記白画素の数が最も少ない前記2値化走査画像が生成された前記走査位置の前記走査画像を前記被検査画像とすることを特徴とする請求項1に記載の穴の内部検査装置。
【請求項7】
前記複数の走査画像のそれぞれには、前記被検査物に貫通して形成された複数の穴の内部が同時に撮像された画像が含まれ、
前記画像処理手段は、
前記複数の走査画像のそれぞれを構成する複数の画素を、それぞれの前記画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、
前記複数の走査画像の中から、同時に撮像された前記複数の穴の前記白画素の数の差が最も大きい前記2値化走査画像が生成された前記走査位置の走査画像を選択して前記被検査画像とすることを特徴とする請求項1に記載の穴の内部検査装置。
【請求項8】
撮像手段と光源との間に置かれた被検査物に貫通して形成された穴の内部を、前記光源から照射される光によって得られる撮像画像を処理することで検査する方法であって、
前記撮像手段によって、前記穴の一方の端から他方の端までを所定の間隔で走査することで複数の走査画像を取得する走査ステップと、
前記複数の走査画像に分布する輝度の情報に基づいて、前記複数の走査画像の中から被検査画像を選択する選択ステップと、
前記被検査画像に対して画像処理を行い所望の検査をする検査ステップと、を含むことを特徴とする穴の内部検査方法。
【請求項9】
前記選択ステップは、前記複数の走査画像の中から最も輝度の低い走査画像を選択して前記被検査画像とすることを特徴とする請求項8に記載の穴の内部検査方法。
【請求項10】
前記選択ステップは、
前記複数の走査画像のそれぞれを構成する複数の画素の輝度を参照し、
前記複数の走査画像の中から、所定の値を上回る輝度の前記画素の数が最も少ない走査画像を選択して前記被検査画像とすることを特徴とする請求項8に記載の穴の内部検査方法。
【請求項11】
前記走査ステップは、前記複数の走査画像のそれぞれに、前記被検査物に貫通して形成された複数の穴の内部が同時に含まれるように撮像し、
前記選択ステップは、
同時に撮像されたそれぞれの前記穴の内部の前記画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、
前記複数の走査画像の中から、前記輝度の差の合計値が最も大きい走査画像を選択することを特徴とする請求項8に記載の穴の内部検査方法。
【請求項12】
前記走査ステップは、前記複数の走査画像のそれぞれに、前記被検査物に貫通して形成された複数の穴の内部が同時に含まれるように撮像し、
前記選択ステップは、
同時に撮像されたそれぞれの前記穴の内部の前記画像を構成する対応した位置のそれぞれの画素の輝度の差を算出し、
前記複数の走査画像の中から、前記輝度の差が所定の値を上回る前記画素の数が最も大きい走査画像を選択することを特徴とする請求項8に記載の穴の内部検査方法。
【請求項13】
前記選択ステップは、
前記複数の走査画像のそれぞれを構成する複数の画素を、それぞれの前記画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、
前記複数の2値化走査画像における前記白画素の数を比較し、
前記白画素の数が最も少ない前記2値化走査画像が生成された前記走査位置の前記走査画像を前記被検査画像として選択することを特徴とする請求項8に記載の穴の内部検査方法。
【請求項14】
前記走査ステップは、
前記複数の走査画像のそれぞれに、前記被検査物に貫通して形成された複数の穴の内部が同時に含まれるように撮像し、
前記選択ステップは、
前記複数の走査画像のそれぞれを構成する複数の画素を、それぞれの前記画素が持つ輝度の情報を基に、所定の閾値によって白画素と黒画素とに分類する2値化処理を行うことで、複数の2値化走査画像を生成し、
前記複数の走査画像の中から、同時に撮像された前記複数の穴の前記白画素の数の差が最も大きい前記2値化走査画像が生成された前記走査位置の走査画像を選択して前記被検査画像とすることを特徴とする請求項8に記載の穴の内部検査方法。
【請求項15】
穴の内部検査装置を、請求項8ないし請求項14のいずれか一項に記載の穴の内部検査方法を含み機能させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】

【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−101019(P2013−101019A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−244210(P2011−244210)
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]