
空中写真測量方法
【課題】作業性が良好で、かつ、高い精度を保持可能な空中写真測量方法の提供を目的とする。
【解決手段】地上所定高度を飛行する飛行体1から撮影した複数の撮影画像2の外部標定要素および撮影画像2中に指定された求点の地上座標を求める空中写真測量方法であって、
飛行体1に搭載したGPS3及びIMU4により直接定位された各撮影画像2のカメラ位置及びカメラ姿勢と、撮影画像2の重複領域20に指定されたタイポイント5とに基づく同時調整計算により、複数の撮影画像2を調整して連結させたブロック21を求め、
次いで、測量範囲に配置された適数の地上基準点6に基づいて前記ブロック21を幾何補正して外部標定要素及び求点座標を得る。
【解決手段】地上所定高度を飛行する飛行体1から撮影した複数の撮影画像2の外部標定要素および撮影画像2中に指定された求点の地上座標を求める空中写真測量方法であって、
飛行体1に搭載したGPS3及びIMU4により直接定位された各撮影画像2のカメラ位置及びカメラ姿勢と、撮影画像2の重複領域20に指定されたタイポイント5とに基づく同時調整計算により、複数の撮影画像2を調整して連結させたブロック21を求め、
次いで、測量範囲に配置された適数の地上基準点6に基づいて前記ブロック21を幾何補正して外部標定要素及び求点座標を得る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、空中写真測量方法に関するものである。
【背景技術】
【0002】
航空機等の飛行体から撮影した撮影画像を利用する空中写真測量は、例えば、非特許文献1に記載されるように、各撮影画像を標定して、同一地上対象物が撮影された複数枚の航空写真の対を撮影時の位置関係を解析的手法により再現し、得られた立体モデルの所定点を地上基準点に連結することにより写真上の任意点の位置情報を得るものである。
【0003】
そして、モデル数の多い空中写真測量に当たっては、モデル毎の絶対標定を行うのではなく、空中三角測量が利用される。
【0004】
しかし、空中三角測量において多数のコース、立体モデル等を構成単位とする撮影領域(ブロック)全体に渡って均質な精度を確保するためには、ブロック調整用の地上基準点を多数要するために、作業性が悪いという問題がある。
【非特許文献1】中村英夫・清水英範共著、「測量学」、技報堂出版株式会社、2000年2月10日、p.315-355
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明は以上の欠点を解消すべくなされたものであって、作業性が良好で、かつ、高い精度を保持可能な空中写真測量方法の提供を目的とする。
【課題を解決するための手段】
【0006】
本発明によれば上記目的は、
地上所定高度を飛行する飛行体1から撮影した複数の撮影画像2の外部標定要素および撮影画像2中に指定された求点の地上座標を求める空中写真測量方法であって、
飛行体1に搭載したGPS3及びIMU4により直接定位された各撮影画像2のカメラ位置及びカメラ姿勢と、撮影画像2の重複領域20に指定されたタイポイント5とに基づく同時調整計算により、複数の撮影画像2を調整して連結させたブロック21を求め、
次いで、測量範囲に配置された適数の地上基準点6に基づいて前記ブロック21を幾何補正して外部標定要素及び求点座標を得る空中写真測量方法を提供することにより達成される。
【0007】
撮影画像2の取得に際してカメラ位置、正確には投影中心位置(x,y,z)は飛行体1に搭載したGPS3からの出力値により、カメラ姿勢(ロール角ω,ピッチ角φ,ヨー角κ)はIMU4(Inertial Measurement Unit:慣性測量装置)からの出力値により直接定位される。
【0008】
一方、この直接定位をそのまま外部標定要素として撮影画像2の標定を行って求点座標を求めた場合の精度は、大縮尺図化時等の高い精度要求に応えるには限界がある。この主な要因としては、GPS衛星数や配置に基づく精度の劣化、楕円体高を標高に変換する際のジオイドモデルに起因する定誤差などが想定される。また、GPS3およびIMU4の誤差は、ステレオモデル上の視差となって現れる。
【0009】
これら問題を解決するために、外部標定するために利用され、すでに外部標定要素がGPS3等の出力値として与えられている本発明においては本来無関係な空中三角測量などにおいて多用されるブロック調整を上記直接定位データを含めて実施する。
【0010】
ブロック調整に際しては地上基準点6やタイポイント5を調整要素として利用することが可能であるが、上述した視差の除去には地上座標の情報までは必ずしも必要ではなく、タイポイント5を用いて調整すれば足りる。また、ブロック調整の手法としては、多項式法、独立モデル法が利用できるが、厳密解を提供するバンドル法を利用することにより精度をより向上させることが可能であり、したがってこの場合、ブロック調整は、重複する撮影画像2のそれぞれの投影中心から投影されるタイポイント5の交会を条件として行うことが望ましい。
【0011】
一方、上述した定誤差を修正するためには、地上座標系の情報に基づいて行う必要があるが、誤差はほぼ一定の傾向を持つものであると仮定できるために上述したようなバンドル法を用いるまでもなく、幾何補正によっても所定の精度を満たすことが可能となる。したがってこの場合、上述した視差が調整されたブロック21に対して地上基準点6に基づいて検証し、その傾向を把握し、幾何補正すれば足りる。特に、上述したようにタイポイント5によるブロック調整時にバンドル法による厳密な調整がなされた場合、幾何補正においては、平面成分及び高さ成分の定誤差はブロック21全体で一律と仮定しても所定の精度を満たすことが可能になる。この為、空間相似変換による平面成分及び高さ成分の同時変換、あるいは平面成分の補正と高さ成分の補正を分離して行う手法により精度を満たすことが可能になる。
【0012】
なお、タイポイント5および地上基準点6からなるブロック調整点に加えて地上座標が既知の検証点を設定し、タイポイント5の残差、地上基準点6の残差及び検証点による較差により精度検証するように構成した場合には、精度管理を確実に行うことができる。
【0013】
本発明による方法は、
地上所定高度を飛行する飛行体1から撮影した複数の撮影画像2の外部標定要素および撮影画像2中に指定された求点の地上座標を求める空中写真測量装置であって、
飛行体1に搭載したGPS3及びIMU4により直接定位された各撮影画像2のカメラ位置及びカメラ姿勢の情報からなる直接定位データを入力する直接定位データ入力部9と、
入力された前記直接定位データと、撮影画像2の重複領域20に指定されたタイポイント5とに基づく同時調整計算により、複数の撮影画像2を調整して連結させたブロック21を求めた後、測量範囲に配置された適数の地上基準点6に基づいて前記ブロック21を幾何補正して外部標定要素及び求点座標を得るブロック調整部10とを有する空中写真測量装置を使用することにより実現可能であり、この測量装置は、所定の実行手順が記載されたプログラムに従って実行される汎用のコンピュータシステムによって構成することができる。
【発明の効果】
【0014】
以上の説明から明らかなように、本発明によれば、直接定位データを使用する場合の地上基準点数の低減という利点を活かしたまま、ブロック調整により精度向上を図ることができるために、精度を維持したままで測量効率を向上させることができる。
【発明を実施するための最良の形態】
【0015】
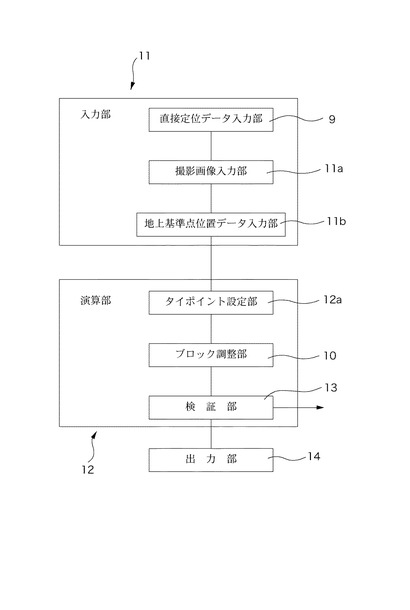
図1ないし図5に本発明の第1の実施の形態を示す。まず、空中写真測量に際し、図2(b)に示すように、GPS3、IMU4を搭載した航空機1から測量領域を撮影し、これをスキャナにより読み込んでディジタル化された撮影画像2を取得する。この実施の形態において、撮影は、1/500図化を想定して1/4000の縮尺で行われる。なお、以上において、撮影画像2は航空写真ネガフィルムをスキャニングして得る場合を示したが、デジタルカメラを使用して直接デジタル化された撮影画像2を得ることもできる。
【0016】
撮影は、図2(a)中において矢印で示す撮影コースに沿って隣接する撮影画像2、2同士と、コースが隣接する撮影画像2、2同士が各々所定のオーバラップ率(Ro)及びサイドラップ率(Rs)で重合するように行われる。
【0017】
また、地上には、ブロック調整点7及び検証点8として使用される地上基準点6が設定される。これらの地上基準点6は、基準点測量により平面位置及び標高が予め測定され、複数の撮影画像2全体により構成されるブロック21の四隅にブロック調整点7が位置し、さらに、検証点8がその近傍に位置するように各々配置される。図2(a)においてブロック調整点7を黒丸で、検証点8を白丸で示す。
【0018】
撮影に際してGPS3、IMU4の出力が同期して取得され、これらから撮影時のカメラ位置及びカメラ姿勢が定位される。
【0019】
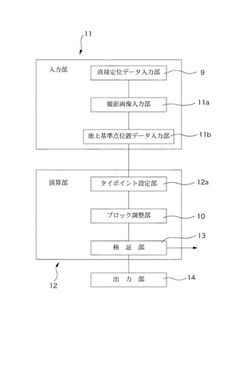
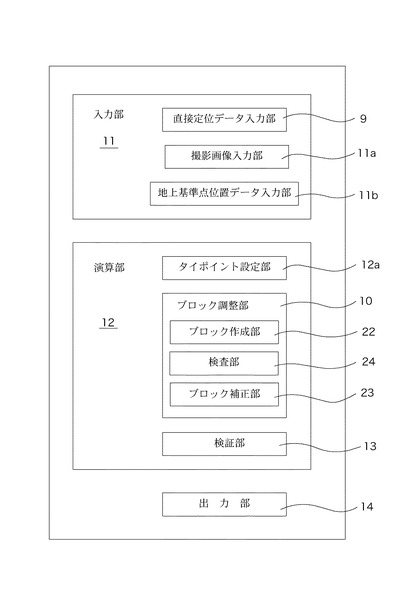
図1に示すように、空中写真測量装置は、直接定位データ入力部9、撮影画像入力部11a及び地上基準点位置データ入力部11bからなる入力部11と、演算部12とを有する。撮影時にGPS3、IMU4から取得したカメラ位置(GPS3出力)及びカメラ姿勢(IMU4出力)情報は、直接定位データとして直接定位データ入力部9に、撮影画像2は撮影画像入力部11aに、地上基準点6の位置データは地上基準点位置データ入力部11bに各々入力される。
【0020】
演算部12は、タイポイント設定部12a、ブロック調整部10及び検証部13を有し、上記ディジタル化された各撮影画像2にはタイポイント設定部12aにおいて、少なくとも2枚以上に撮影されている領域がタイポイント5して抽出される。タイポイント5の抽出は、目視により、あるいはパターンマッチングによる自動抽出により地上基準点6あるいは目印となる地表物を抽出することにより行う。抽出されたタイポイント5を図2(a)において白抜きの矩形枠で示す。
【0021】
タイポイント5の抽出により、複数の撮影画像2が互いに関連付けられた状態となって、全体としてブロック21を構成することとなり、次いで、このブロック21に対してブロック調整部10においてブロック調整を行う。ブロック調整は、タイポイント5全点が立体モデル上の対応点に交会することを条件とする、いわゆるバンドル法ブロック調整により行われる。ブロック調整においては、上記直接定位データも調整対象とされる。
【0022】
次いで、ブロック調整部10におけるブロック調整の結果は検証部13において精度検証され、精度が所定の閾値を超える場合には、再測等がなされる。検証項目には、公共測量作業規程等に定められている評価項目を含めるのが望ましく、この実施の形態においては、タイポイント交会残差が設定される。閾値も、上記公共測量作業規程等を満足するように設定するのが望ましく、この実施の形態において、1/500図化の場合には、例えば、
タイポイント交会残差の平均二乗誤差が15μm以内、最大値30μm以内に設定される。
【0023】
また、1/1000図化の場合も同様に、例えば、
タイポイント交会残差の平均二乗誤差が15μm以内、最大値30μm以内に設定される。
【0024】
ブロック調整の精度が検証部13における閾値以内である場合には、出力部14から例えば図化機に出力されて図化された後、必要位置が計測される。
【0025】
以上、本発明の実施の形態を1/500図化を想定して構成する場合を例にとって説明したが、1/1000、あるいはこれよりも小さい縮尺の作業にも使用できることは勿論である。
【0026】
図6ないし図8に本発明の第2の実施の形態を示す。なお、この実施の形態において上述した実施の形態と同一の構成要素は図中に同じ符号を付して説明を省略する。この実施の形態は直接定位データをそのまま外部標定要素とした場合に生じる誤差の原因、傾向に着目して誤差の調整手法を変更したもので、ブロック調整は、視差を除去するためのバンドル法と、定誤差を解消するための幾何補正とを複合して構成される。
【0027】
この実施の形態におけるバンドル法によるブロック調整は直接定位データとタイポイント5を用い、上述した第1の実施の形態およびこれに対応する後述する実施例と同様に、GPS3、IMU4から撮影時のカメラ位置及びカメラ姿勢が定位され、タイポイント5はタイポイント設定部12a、あるいは目視により適宜抽出される。
【0028】
撮影は、図6(a)に示すように各撮影画像2がほぼ60%のオーバーラップ率(Ro)、およびほぼ30%のサイドラップ率(Rs)で重合するように行われる。また、図6(a)右端に示すように、撮影コースをほぼ直交方向に交差させた、いわゆるクロスストリップを利用することにより、重合率の低いサイドラップ方向の精度が補うことも可能である。
【0029】
空中写真測量装置は、図7に示すように、演算部12がタイポイント設定部12aとブロック調整部10、検証部13により構成される。検証部13では、上述した実施の形態と同様に精度検証する。また、検証結果に応じて再測等を促すようにすることも可能である。また、上記ブロック調整部10は、バンドル法によるブロック調整により基準となるブロック21を作成するブロック作成部22と、これにより得られたブロック21に対して幾何補正を行うブロック補正部23とを有する。
【0030】
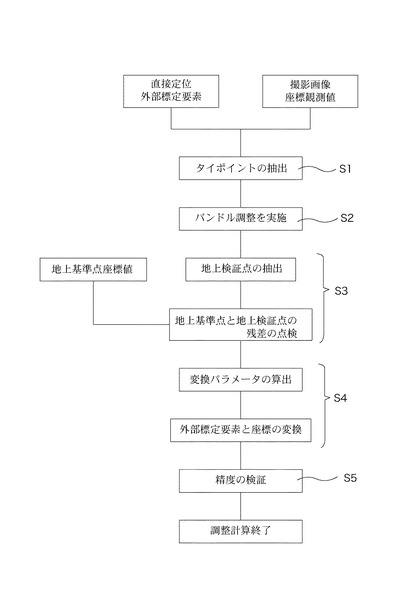
タイポイント5は、図8に示すように上述した実施の形態同様、各撮影画像2において隣接する他の撮影画像2と重合する領域(重複領域20)において適宜抽出され(ステップS1)、ブロック21の作成は、GPS3、IMU4のデータに基づいて決定された各撮影画像2取得時のカメラ位置及びカメラ姿勢に基づき、隣接する撮影画像2のそれぞれの投影中心から投影されるタイポイント5が交会することを条件とするバンドル法ブロック調整により、全ての撮影画像2を同時に調整して一体に連結させて行われる(ステップS2)。
【0031】
作成されたブロック21は、次いで、ブロック補正部23により補正される。ブロック21は、予め地上基準点6がその画像の四隅部において撮影されるように適宜調節して形成され、先ずブロック21の画像上に表示される地上基準点6としての画像上基準点7’が抽出される(ステップS3)。画像上基準点7’の抽出は、目視により行われるが、パターンマッチングによる自動抽出を行っても良い。ブロック補正部23は、地上基準点6、すなわち地上座標に基づくブロック調整点7および画像上基準点7’を介してブロック21の直接定位データ等に基づく画像上の座標系を地上座標系に合致させるように変換する(ステップS4)。
【0032】
ブロック調整点7としての地上基準点6の地上座標値は地上基準点位置データ入力部11bからの入力に基づき、具体的には、4点の地上基準点6の地上座標と画像上基準点7’のブロック21画像上の座標とをX、Y、Z軸上で比べ、XY軸方向(平面位置)の相違についてはアフィン変換を行い、Z軸方向(高さ位置)の相違については両座標系間の差異の平均値を一律に与えてブロック21を垂直移動させることにより、ブロック21画像上の座標と地上座標との整合を図る。図6(b)はブロック21を回転、拡大・縮小、平行移動等させるアフィン変換の一例である回転処理を施した場合を例示したもので、同図において実線はブロック21等の画像上の座標に基づく位置を表し、二点鎖線は地上座標に基づく位置を、矢印は回転処理を表す。
【0033】
また、以上のブロック21の補正に際しては、ブロック21の画像上の座標により特定される仮想としての画像上基準点7’と、地上座標値により特定される実体としての地上基準点6(ブロック調整点7)との残差が検査部24により点検され(ステップS3)、この残差に基づいて幾何補正の変換パラメータが決定される(ステップS4)。
【0034】
なお、上述した幾何補正においては、それぞれ4点の地上基準点6(ブロック調整点7)および画像上基準点7’に基づいて平面成分にはアフィン変換を行い、高さ成分には誤差の平均値を一律に与える場合を示したが、例えば平面成分の残差の傾向に応じて地上基準点6(ブロック調整点7)を3点にして平面成分についてヘルマート変換を用いたり、高さ成分について多項式を用いて算出したり、あるいは平面、高さ成分を空間的な相似変換により一括変換するなど、地上基準点6数、幾何補正方法については、実験的に適宜決定することが可能である。また、地上基準点6はタイポイント5を兼ねて構成することも可能で、この場合ブロック21作成時には地上基準点6はブロック21画像上の座標系に基づくタイポイント5のみの対象とし、一方、ブロック21補正時には、ブロック21画像上の座標を示す画像上基準点7’としての役割と、地上座標値を示す役割とを果たすように用いればよい。
【0035】
次に、ステップS5にて、幾何補正後の精度点検を行う。具体的には、幾何補正を行った後、各ブロック調整点の残差を求めることにより、測量精度の評価を実施することができる。
【実施例】
【0036】
以下に、上述した第1の実施の形態に示す本発明の有効性を確認するために行った実験を示す。実験は、GPS3、IMU4からの出力を標定要素として使用したモデルを構築し、検証点8を観測して実測値と比較することにより精度等の観測を行った。
【0037】
また、直接定位データを用いたブロック同時調整の精度検証を行うため、いくつかの条件でブロック調整を行い比較、検証した。
1.実験ブロックの概要
実験は大縮尺図化の範疇に入ると思われる1/500図化時を想定した1/4000撮影で実施した。撮影諸元を表1に示す。なお、カメラ座標系に対するGPSアンテナの位置関係及びIMU座標系との位置関係、取り付け角度等のキャリブレーションは、実測及び事前のボアサイトキャリブレーションにより決定済みである。位置関係はcmレベル、角度は0.005度以下のレベルで調整されている。
【0038】
【表1】

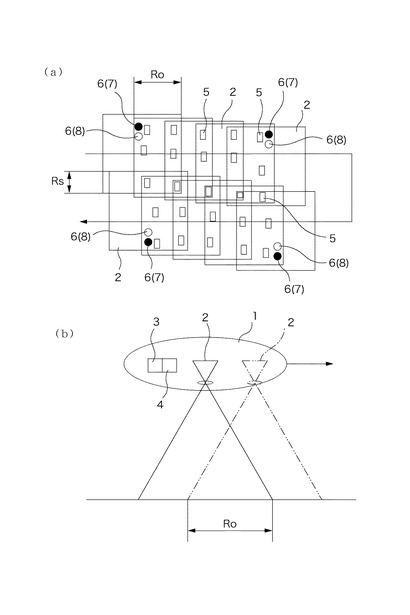
図3に各々のブロックの主点位置とブロック調整点7、検証点8の配置を示す。図中主点位置は白丸で、ブロック調整点7または検証点8は三角形で示される。地上参照局にはつくば3の1秒間隔データを用い、GPS3のイニシャライズを飛行中に行う、インエアーアライメントを実施した。
【0039】
ブロック調整点7(検証点8)には写真上で明瞭に判読できる路面表示等を選択し、電子基準点つくば1を予点としてGPS3測量により実測を行った。
2.直接定位計算
撮影ミッション時に取得されたGPS3およびIMUデータと地上参照局のGPS3データを用いて直接定位計算を実施した。直接定位の計算はキネマティックGPS解析、IMUデータの合成解析、各写真の外部標定要素の算出の順に実施される計算機プログラムを使用した。
【0040】
キネマティックGPS解を求める際に、時系列正反方向の較差と、位置の標準偏差を求めて、これらを検証したところ、較差は10cm以内、標準偏差は数cmであることが確認できた。また、GPS3とIMU4の合成後の位置の標準偏差も数cmであり、直接定位の解析は良好であると判断した。
3.写真画像のデジタル化
以降の解析をデジタル・フォトグラメトリックワークステーション上で行うために、取得された航空写真ネガフィルムをフォトグラメトリックスキャナーによりデジタルデータ化した。スキャナーはLeica DSW500を使用し、解像度10μmでスキャニングを実施した。
4.直接定位による検証点の観測
比較のために、デジタル・フォトグラメトリックワークステーションを用いて、直接定位により算出された外部標定要素のみを使用してステレオモデルを構築し、検証点を観測した。
5.ブロック調整
デジタル・フォトグラメトリックワークステーション上で稼働する自動空中三角測量プログラムによりブロック調整を行った。この際、外部標定要素には、直接定位で得られたものが使用され、タイポイント5は、5×5の格子状に配置されるように設定し、自動空中三角測量プログラムにより自動抽出した。自動抽出された点は異常値検索により検出された点及び視差が大きな点が削除されて必要に応じて再観測される。
【0041】
以降の解析はGPS/IMUデータを同時調整できるバンドル法空中三角測量プログラムを用いて実施した。
6. 結果
表にブロック4隅の4点を固定してブロック調整を行った場合、ブロック中央部の1点のみを固定してブロック調整を行った場合の基準点・検証点残差の最大・平均二乗誤差を示す。ブロック調整に際しては、主点位置(xyz)に約7cm、ω、φに0.005度、κに0.008度、固定する基準点にはX、Y、Zそれぞれ5cmの重量を与えた。
【0042】
【表2】
また、表には、本発明との比較のために、直接定位データのみを用いて構築したモデル上で観測した場合と、直接定位のデータを使用せず、4隅の基準点だけでブロック調整を行った場合における基準点・検証点8残差の最大・平均二乗誤差を示した。
【0043】
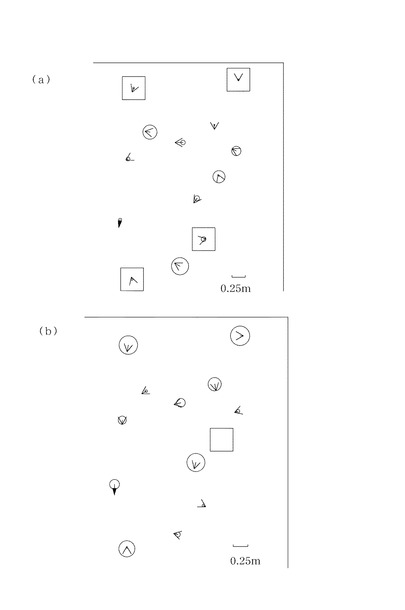
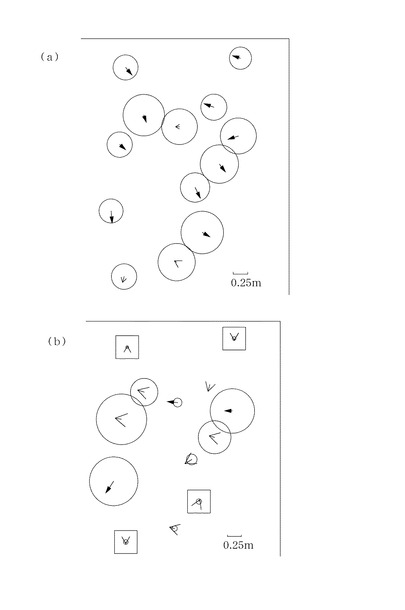
図4はこれらの結果を検証点位置上にプロットした図を示すもので、本発明において4点を固定した場合が図4(a)に、1点を固定した場合が図4(b)に、また、比較例である直接定位データのみの場合が図5(a)に、直接定位データを使用しない場合が図5(b)に各々対応する。なお、図4、5において平面較差が対象点からのベクトルで、高さ方向の較差が円の半径により示される。また、ブロック調整時における固定点は方形枠で囲って示される。
【0044】
表2及び図4、5から明らかなように、直接定位データを同時調整することにより、直接定位データをそのまま使用する場合に比して、精度向上が得られることが明らかになった。
【0045】
また、ブロック調整に当たっては、1点固定の場合であっても、4点固定に比して大きな精度の低下が見られないことから、1点の基準点の場合であっても、十分な精度が得られることが確認できた。
【0046】
さらに、1/500地形図の精度基準は平面および高さとも標準偏差で0.25mとされており、また、従来のバンドル法空中三角測量における1/4000撮影時の基準点残差の制限値は、平面、高さともに標準偏差で12cm、最大値が24cmに相当するが、本発明の実施例における結果は、これらの範囲内に入っていることから、1/500の大縮尺図化に使用可能であることが確認できた。
【図面の簡単な説明】
【0047】
【図1】本発明の第1の実施の形態の空中写真測量装置を示すブロック図である。
【図2】本発明の第1の実施の形態の実施方法を示す説明図で、(a)は撮影画像の取得状態を示す図、(b)は(a)の側面図である。
【図3】実施例の撮影コースを示す図である。
【図4】実験結果を示す図である。
【図5】比較例の実験結果を示す図である。
【図6】本発明の第2の実施の形態の実施方法を示す説明図で、(a)は撮影画像の取得状態を示す図、(b)は幾何補正を示す図である。
【図7】本発明の第2の実施の形態の空中写真測量装置を示すブロック図である。
【図8】本発明の第2の実施の形態の空中写真測量装置の処理手順を示す図である。
【符号の説明】
【0048】
1 飛行体
2 撮影画像
3 GPS
4 IMU
5 タイポイント
6 地上基準点
9 直接定位データ入力部
10 ブロック調整部
20 重複領域
21 ブロック
【技術分野】
【0001】
本発明は、空中写真測量方法に関するものである。
【背景技術】
【0002】
航空機等の飛行体から撮影した撮影画像を利用する空中写真測量は、例えば、非特許文献1に記載されるように、各撮影画像を標定して、同一地上対象物が撮影された複数枚の航空写真の対を撮影時の位置関係を解析的手法により再現し、得られた立体モデルの所定点を地上基準点に連結することにより写真上の任意点の位置情報を得るものである。
【0003】
そして、モデル数の多い空中写真測量に当たっては、モデル毎の絶対標定を行うのではなく、空中三角測量が利用される。
【0004】
しかし、空中三角測量において多数のコース、立体モデル等を構成単位とする撮影領域(ブロック)全体に渡って均質な精度を確保するためには、ブロック調整用の地上基準点を多数要するために、作業性が悪いという問題がある。
【非特許文献1】中村英夫・清水英範共著、「測量学」、技報堂出版株式会社、2000年2月10日、p.315-355
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明は以上の欠点を解消すべくなされたものであって、作業性が良好で、かつ、高い精度を保持可能な空中写真測量方法の提供を目的とする。
【課題を解決するための手段】
【0006】
本発明によれば上記目的は、
地上所定高度を飛行する飛行体1から撮影した複数の撮影画像2の外部標定要素および撮影画像2中に指定された求点の地上座標を求める空中写真測量方法であって、
飛行体1に搭載したGPS3及びIMU4により直接定位された各撮影画像2のカメラ位置及びカメラ姿勢と、撮影画像2の重複領域20に指定されたタイポイント5とに基づく同時調整計算により、複数の撮影画像2を調整して連結させたブロック21を求め、
次いで、測量範囲に配置された適数の地上基準点6に基づいて前記ブロック21を幾何補正して外部標定要素及び求点座標を得る空中写真測量方法を提供することにより達成される。
【0007】
撮影画像2の取得に際してカメラ位置、正確には投影中心位置(x,y,z)は飛行体1に搭載したGPS3からの出力値により、カメラ姿勢(ロール角ω,ピッチ角φ,ヨー角κ)はIMU4(Inertial Measurement Unit:慣性測量装置)からの出力値により直接定位される。
【0008】
一方、この直接定位をそのまま外部標定要素として撮影画像2の標定を行って求点座標を求めた場合の精度は、大縮尺図化時等の高い精度要求に応えるには限界がある。この主な要因としては、GPS衛星数や配置に基づく精度の劣化、楕円体高を標高に変換する際のジオイドモデルに起因する定誤差などが想定される。また、GPS3およびIMU4の誤差は、ステレオモデル上の視差となって現れる。
【0009】
これら問題を解決するために、外部標定するために利用され、すでに外部標定要素がGPS3等の出力値として与えられている本発明においては本来無関係な空中三角測量などにおいて多用されるブロック調整を上記直接定位データを含めて実施する。
【0010】
ブロック調整に際しては地上基準点6やタイポイント5を調整要素として利用することが可能であるが、上述した視差の除去には地上座標の情報までは必ずしも必要ではなく、タイポイント5を用いて調整すれば足りる。また、ブロック調整の手法としては、多項式法、独立モデル法が利用できるが、厳密解を提供するバンドル法を利用することにより精度をより向上させることが可能であり、したがってこの場合、ブロック調整は、重複する撮影画像2のそれぞれの投影中心から投影されるタイポイント5の交会を条件として行うことが望ましい。
【0011】
一方、上述した定誤差を修正するためには、地上座標系の情報に基づいて行う必要があるが、誤差はほぼ一定の傾向を持つものであると仮定できるために上述したようなバンドル法を用いるまでもなく、幾何補正によっても所定の精度を満たすことが可能となる。したがってこの場合、上述した視差が調整されたブロック21に対して地上基準点6に基づいて検証し、その傾向を把握し、幾何補正すれば足りる。特に、上述したようにタイポイント5によるブロック調整時にバンドル法による厳密な調整がなされた場合、幾何補正においては、平面成分及び高さ成分の定誤差はブロック21全体で一律と仮定しても所定の精度を満たすことが可能になる。この為、空間相似変換による平面成分及び高さ成分の同時変換、あるいは平面成分の補正と高さ成分の補正を分離して行う手法により精度を満たすことが可能になる。
【0012】
なお、タイポイント5および地上基準点6からなるブロック調整点に加えて地上座標が既知の検証点を設定し、タイポイント5の残差、地上基準点6の残差及び検証点による較差により精度検証するように構成した場合には、精度管理を確実に行うことができる。
【0013】
本発明による方法は、
地上所定高度を飛行する飛行体1から撮影した複数の撮影画像2の外部標定要素および撮影画像2中に指定された求点の地上座標を求める空中写真測量装置であって、
飛行体1に搭載したGPS3及びIMU4により直接定位された各撮影画像2のカメラ位置及びカメラ姿勢の情報からなる直接定位データを入力する直接定位データ入力部9と、
入力された前記直接定位データと、撮影画像2の重複領域20に指定されたタイポイント5とに基づく同時調整計算により、複数の撮影画像2を調整して連結させたブロック21を求めた後、測量範囲に配置された適数の地上基準点6に基づいて前記ブロック21を幾何補正して外部標定要素及び求点座標を得るブロック調整部10とを有する空中写真測量装置を使用することにより実現可能であり、この測量装置は、所定の実行手順が記載されたプログラムに従って実行される汎用のコンピュータシステムによって構成することができる。
【発明の効果】
【0014】
以上の説明から明らかなように、本発明によれば、直接定位データを使用する場合の地上基準点数の低減という利点を活かしたまま、ブロック調整により精度向上を図ることができるために、精度を維持したままで測量効率を向上させることができる。
【発明を実施するための最良の形態】
【0015】
図1ないし図5に本発明の第1の実施の形態を示す。まず、空中写真測量に際し、図2(b)に示すように、GPS3、IMU4を搭載した航空機1から測量領域を撮影し、これをスキャナにより読み込んでディジタル化された撮影画像2を取得する。この実施の形態において、撮影は、1/500図化を想定して1/4000の縮尺で行われる。なお、以上において、撮影画像2は航空写真ネガフィルムをスキャニングして得る場合を示したが、デジタルカメラを使用して直接デジタル化された撮影画像2を得ることもできる。
【0016】
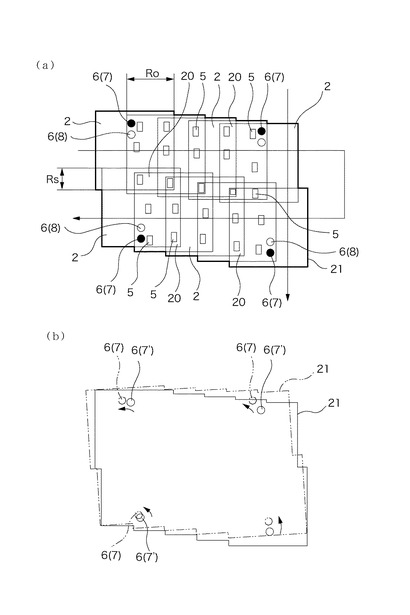
撮影は、図2(a)中において矢印で示す撮影コースに沿って隣接する撮影画像2、2同士と、コースが隣接する撮影画像2、2同士が各々所定のオーバラップ率(Ro)及びサイドラップ率(Rs)で重合するように行われる。
【0017】
また、地上には、ブロック調整点7及び検証点8として使用される地上基準点6が設定される。これらの地上基準点6は、基準点測量により平面位置及び標高が予め測定され、複数の撮影画像2全体により構成されるブロック21の四隅にブロック調整点7が位置し、さらに、検証点8がその近傍に位置するように各々配置される。図2(a)においてブロック調整点7を黒丸で、検証点8を白丸で示す。
【0018】
撮影に際してGPS3、IMU4の出力が同期して取得され、これらから撮影時のカメラ位置及びカメラ姿勢が定位される。
【0019】
図1に示すように、空中写真測量装置は、直接定位データ入力部9、撮影画像入力部11a及び地上基準点位置データ入力部11bからなる入力部11と、演算部12とを有する。撮影時にGPS3、IMU4から取得したカメラ位置(GPS3出力)及びカメラ姿勢(IMU4出力)情報は、直接定位データとして直接定位データ入力部9に、撮影画像2は撮影画像入力部11aに、地上基準点6の位置データは地上基準点位置データ入力部11bに各々入力される。
【0020】
演算部12は、タイポイント設定部12a、ブロック調整部10及び検証部13を有し、上記ディジタル化された各撮影画像2にはタイポイント設定部12aにおいて、少なくとも2枚以上に撮影されている領域がタイポイント5して抽出される。タイポイント5の抽出は、目視により、あるいはパターンマッチングによる自動抽出により地上基準点6あるいは目印となる地表物を抽出することにより行う。抽出されたタイポイント5を図2(a)において白抜きの矩形枠で示す。
【0021】
タイポイント5の抽出により、複数の撮影画像2が互いに関連付けられた状態となって、全体としてブロック21を構成することとなり、次いで、このブロック21に対してブロック調整部10においてブロック調整を行う。ブロック調整は、タイポイント5全点が立体モデル上の対応点に交会することを条件とする、いわゆるバンドル法ブロック調整により行われる。ブロック調整においては、上記直接定位データも調整対象とされる。
【0022】
次いで、ブロック調整部10におけるブロック調整の結果は検証部13において精度検証され、精度が所定の閾値を超える場合には、再測等がなされる。検証項目には、公共測量作業規程等に定められている評価項目を含めるのが望ましく、この実施の形態においては、タイポイント交会残差が設定される。閾値も、上記公共測量作業規程等を満足するように設定するのが望ましく、この実施の形態において、1/500図化の場合には、例えば、
タイポイント交会残差の平均二乗誤差が15μm以内、最大値30μm以内に設定される。
【0023】
また、1/1000図化の場合も同様に、例えば、
タイポイント交会残差の平均二乗誤差が15μm以内、最大値30μm以内に設定される。
【0024】
ブロック調整の精度が検証部13における閾値以内である場合には、出力部14から例えば図化機に出力されて図化された後、必要位置が計測される。
【0025】
以上、本発明の実施の形態を1/500図化を想定して構成する場合を例にとって説明したが、1/1000、あるいはこれよりも小さい縮尺の作業にも使用できることは勿論である。
【0026】
図6ないし図8に本発明の第2の実施の形態を示す。なお、この実施の形態において上述した実施の形態と同一の構成要素は図中に同じ符号を付して説明を省略する。この実施の形態は直接定位データをそのまま外部標定要素とした場合に生じる誤差の原因、傾向に着目して誤差の調整手法を変更したもので、ブロック調整は、視差を除去するためのバンドル法と、定誤差を解消するための幾何補正とを複合して構成される。
【0027】
この実施の形態におけるバンドル法によるブロック調整は直接定位データとタイポイント5を用い、上述した第1の実施の形態およびこれに対応する後述する実施例と同様に、GPS3、IMU4から撮影時のカメラ位置及びカメラ姿勢が定位され、タイポイント5はタイポイント設定部12a、あるいは目視により適宜抽出される。
【0028】
撮影は、図6(a)に示すように各撮影画像2がほぼ60%のオーバーラップ率(Ro)、およびほぼ30%のサイドラップ率(Rs)で重合するように行われる。また、図6(a)右端に示すように、撮影コースをほぼ直交方向に交差させた、いわゆるクロスストリップを利用することにより、重合率の低いサイドラップ方向の精度が補うことも可能である。
【0029】
空中写真測量装置は、図7に示すように、演算部12がタイポイント設定部12aとブロック調整部10、検証部13により構成される。検証部13では、上述した実施の形態と同様に精度検証する。また、検証結果に応じて再測等を促すようにすることも可能である。また、上記ブロック調整部10は、バンドル法によるブロック調整により基準となるブロック21を作成するブロック作成部22と、これにより得られたブロック21に対して幾何補正を行うブロック補正部23とを有する。
【0030】
タイポイント5は、図8に示すように上述した実施の形態同様、各撮影画像2において隣接する他の撮影画像2と重合する領域(重複領域20)において適宜抽出され(ステップS1)、ブロック21の作成は、GPS3、IMU4のデータに基づいて決定された各撮影画像2取得時のカメラ位置及びカメラ姿勢に基づき、隣接する撮影画像2のそれぞれの投影中心から投影されるタイポイント5が交会することを条件とするバンドル法ブロック調整により、全ての撮影画像2を同時に調整して一体に連結させて行われる(ステップS2)。
【0031】
作成されたブロック21は、次いで、ブロック補正部23により補正される。ブロック21は、予め地上基準点6がその画像の四隅部において撮影されるように適宜調節して形成され、先ずブロック21の画像上に表示される地上基準点6としての画像上基準点7’が抽出される(ステップS3)。画像上基準点7’の抽出は、目視により行われるが、パターンマッチングによる自動抽出を行っても良い。ブロック補正部23は、地上基準点6、すなわち地上座標に基づくブロック調整点7および画像上基準点7’を介してブロック21の直接定位データ等に基づく画像上の座標系を地上座標系に合致させるように変換する(ステップS4)。
【0032】
ブロック調整点7としての地上基準点6の地上座標値は地上基準点位置データ入力部11bからの入力に基づき、具体的には、4点の地上基準点6の地上座標と画像上基準点7’のブロック21画像上の座標とをX、Y、Z軸上で比べ、XY軸方向(平面位置)の相違についてはアフィン変換を行い、Z軸方向(高さ位置)の相違については両座標系間の差異の平均値を一律に与えてブロック21を垂直移動させることにより、ブロック21画像上の座標と地上座標との整合を図る。図6(b)はブロック21を回転、拡大・縮小、平行移動等させるアフィン変換の一例である回転処理を施した場合を例示したもので、同図において実線はブロック21等の画像上の座標に基づく位置を表し、二点鎖線は地上座標に基づく位置を、矢印は回転処理を表す。
【0033】
また、以上のブロック21の補正に際しては、ブロック21の画像上の座標により特定される仮想としての画像上基準点7’と、地上座標値により特定される実体としての地上基準点6(ブロック調整点7)との残差が検査部24により点検され(ステップS3)、この残差に基づいて幾何補正の変換パラメータが決定される(ステップS4)。
【0034】
なお、上述した幾何補正においては、それぞれ4点の地上基準点6(ブロック調整点7)および画像上基準点7’に基づいて平面成分にはアフィン変換を行い、高さ成分には誤差の平均値を一律に与える場合を示したが、例えば平面成分の残差の傾向に応じて地上基準点6(ブロック調整点7)を3点にして平面成分についてヘルマート変換を用いたり、高さ成分について多項式を用いて算出したり、あるいは平面、高さ成分を空間的な相似変換により一括変換するなど、地上基準点6数、幾何補正方法については、実験的に適宜決定することが可能である。また、地上基準点6はタイポイント5を兼ねて構成することも可能で、この場合ブロック21作成時には地上基準点6はブロック21画像上の座標系に基づくタイポイント5のみの対象とし、一方、ブロック21補正時には、ブロック21画像上の座標を示す画像上基準点7’としての役割と、地上座標値を示す役割とを果たすように用いればよい。
【0035】
次に、ステップS5にて、幾何補正後の精度点検を行う。具体的には、幾何補正を行った後、各ブロック調整点の残差を求めることにより、測量精度の評価を実施することができる。
【実施例】
【0036】
以下に、上述した第1の実施の形態に示す本発明の有効性を確認するために行った実験を示す。実験は、GPS3、IMU4からの出力を標定要素として使用したモデルを構築し、検証点8を観測して実測値と比較することにより精度等の観測を行った。
【0037】
また、直接定位データを用いたブロック同時調整の精度検証を行うため、いくつかの条件でブロック調整を行い比較、検証した。
1.実験ブロックの概要
実験は大縮尺図化の範疇に入ると思われる1/500図化時を想定した1/4000撮影で実施した。撮影諸元を表1に示す。なお、カメラ座標系に対するGPSアンテナの位置関係及びIMU座標系との位置関係、取り付け角度等のキャリブレーションは、実測及び事前のボアサイトキャリブレーションにより決定済みである。位置関係はcmレベル、角度は0.005度以下のレベルで調整されている。
【0038】
【表1】
図3に各々のブロックの主点位置とブロック調整点7、検証点8の配置を示す。図中主点位置は白丸で、ブロック調整点7または検証点8は三角形で示される。地上参照局にはつくば3の1秒間隔データを用い、GPS3のイニシャライズを飛行中に行う、インエアーアライメントを実施した。
【0039】
ブロック調整点7(検証点8)には写真上で明瞭に判読できる路面表示等を選択し、電子基準点つくば1を予点としてGPS3測量により実測を行った。
2.直接定位計算
撮影ミッション時に取得されたGPS3およびIMUデータと地上参照局のGPS3データを用いて直接定位計算を実施した。直接定位の計算はキネマティックGPS解析、IMUデータの合成解析、各写真の外部標定要素の算出の順に実施される計算機プログラムを使用した。
【0040】
キネマティックGPS解を求める際に、時系列正反方向の較差と、位置の標準偏差を求めて、これらを検証したところ、較差は10cm以内、標準偏差は数cmであることが確認できた。また、GPS3とIMU4の合成後の位置の標準偏差も数cmであり、直接定位の解析は良好であると判断した。
3.写真画像のデジタル化
以降の解析をデジタル・フォトグラメトリックワークステーション上で行うために、取得された航空写真ネガフィルムをフォトグラメトリックスキャナーによりデジタルデータ化した。スキャナーはLeica DSW500を使用し、解像度10μmでスキャニングを実施した。
4.直接定位による検証点の観測
比較のために、デジタル・フォトグラメトリックワークステーションを用いて、直接定位により算出された外部標定要素のみを使用してステレオモデルを構築し、検証点を観測した。
5.ブロック調整
デジタル・フォトグラメトリックワークステーション上で稼働する自動空中三角測量プログラムによりブロック調整を行った。この際、外部標定要素には、直接定位で得られたものが使用され、タイポイント5は、5×5の格子状に配置されるように設定し、自動空中三角測量プログラムにより自動抽出した。自動抽出された点は異常値検索により検出された点及び視差が大きな点が削除されて必要に応じて再観測される。
【0041】
以降の解析はGPS/IMUデータを同時調整できるバンドル法空中三角測量プログラムを用いて実施した。
6. 結果
表にブロック4隅の4点を固定してブロック調整を行った場合、ブロック中央部の1点のみを固定してブロック調整を行った場合の基準点・検証点残差の最大・平均二乗誤差を示す。ブロック調整に際しては、主点位置(xyz)に約7cm、ω、φに0.005度、κに0.008度、固定する基準点にはX、Y、Zそれぞれ5cmの重量を与えた。
【0042】
【表2】
また、表には、本発明との比較のために、直接定位データのみを用いて構築したモデル上で観測した場合と、直接定位のデータを使用せず、4隅の基準点だけでブロック調整を行った場合における基準点・検証点8残差の最大・平均二乗誤差を示した。
【0043】
図4はこれらの結果を検証点位置上にプロットした図を示すもので、本発明において4点を固定した場合が図4(a)に、1点を固定した場合が図4(b)に、また、比較例である直接定位データのみの場合が図5(a)に、直接定位データを使用しない場合が図5(b)に各々対応する。なお、図4、5において平面較差が対象点からのベクトルで、高さ方向の較差が円の半径により示される。また、ブロック調整時における固定点は方形枠で囲って示される。
【0044】
表2及び図4、5から明らかなように、直接定位データを同時調整することにより、直接定位データをそのまま使用する場合に比して、精度向上が得られることが明らかになった。
【0045】
また、ブロック調整に当たっては、1点固定の場合であっても、4点固定に比して大きな精度の低下が見られないことから、1点の基準点の場合であっても、十分な精度が得られることが確認できた。
【0046】
さらに、1/500地形図の精度基準は平面および高さとも標準偏差で0.25mとされており、また、従来のバンドル法空中三角測量における1/4000撮影時の基準点残差の制限値は、平面、高さともに標準偏差で12cm、最大値が24cmに相当するが、本発明の実施例における結果は、これらの範囲内に入っていることから、1/500の大縮尺図化に使用可能であることが確認できた。
【図面の簡単な説明】
【0047】
【図1】本発明の第1の実施の形態の空中写真測量装置を示すブロック図である。
【図2】本発明の第1の実施の形態の実施方法を示す説明図で、(a)は撮影画像の取得状態を示す図、(b)は(a)の側面図である。
【図3】実施例の撮影コースを示す図である。
【図4】実験結果を示す図である。
【図5】比較例の実験結果を示す図である。
【図6】本発明の第2の実施の形態の実施方法を示す説明図で、(a)は撮影画像の取得状態を示す図、(b)は幾何補正を示す図である。
【図7】本発明の第2の実施の形態の空中写真測量装置を示すブロック図である。
【図8】本発明の第2の実施の形態の空中写真測量装置の処理手順を示す図である。
【符号の説明】
【0048】
1 飛行体
2 撮影画像
3 GPS
4 IMU
5 タイポイント
6 地上基準点
9 直接定位データ入力部
10 ブロック調整部
20 重複領域
21 ブロック
【特許請求の範囲】
【請求項1】
地上所定高度を飛行する飛行体から撮影した複数の撮影画像の外部標定要素及び撮影画像中に指定された求点の地上座標を求める空中写真測量方法であって、
飛行体に搭載したGPS及びIMUにより直接定位された各撮影画像のカメラ位置及びカメラ姿勢と、撮影画像の重複領域に指定されたタイポイントとに基づく同時調整計算により、複数の撮影画像を調整して連結させたブロックを求め、
次いで、測量範囲に配置された適数の地上基準点に基づいて前記ブロックを幾何補正して外部標定要素及び求点座標を得る空中写真測量方法。
【請求項2】
前記幾何補正は、高さ成分の補正をブロック全体に一律に行う請求項1記載の空中写真測量方法。
【請求項3】
前記幾何補正は、平面成分の補正をブロック全体に一律に行う請求項1または2記載の空中写真測量方法。
【請求項4】
地上所定高度を飛行する飛行体から撮影した複数の撮影画像の外部標定要素及び撮影画像中に指定された求点の地上座標を求める空中写真測量装置であって、
飛行体に搭載したGPS及びIMUにより直接定位された各撮影画像のカメラ位置及びカメラ姿勢の情報からなる直接定位データを入力する直接定位データ入力部と、
入力された前記直接定位データと、撮影画像の重複領域に指定されたタイポイントとに基づく同時調整計算により、複数の撮影画像を調整して連結させたブロックを求めた後、測量範囲に配置された適数の地上基準点に基づいて前記ブロックを幾何補正して外部標定要素及び求点座標を得るブロック調整部とを有する空中写真測量装置。
【請求項1】
地上所定高度を飛行する飛行体から撮影した複数の撮影画像の外部標定要素及び撮影画像中に指定された求点の地上座標を求める空中写真測量方法であって、
飛行体に搭載したGPS及びIMUにより直接定位された各撮影画像のカメラ位置及びカメラ姿勢と、撮影画像の重複領域に指定されたタイポイントとに基づく同時調整計算により、複数の撮影画像を調整して連結させたブロックを求め、
次いで、測量範囲に配置された適数の地上基準点に基づいて前記ブロックを幾何補正して外部標定要素及び求点座標を得る空中写真測量方法。
【請求項2】
前記幾何補正は、高さ成分の補正をブロック全体に一律に行う請求項1記載の空中写真測量方法。
【請求項3】
前記幾何補正は、平面成分の補正をブロック全体に一律に行う請求項1または2記載の空中写真測量方法。
【請求項4】
地上所定高度を飛行する飛行体から撮影した複数の撮影画像の外部標定要素及び撮影画像中に指定された求点の地上座標を求める空中写真測量装置であって、
飛行体に搭載したGPS及びIMUにより直接定位された各撮影画像のカメラ位置及びカメラ姿勢の情報からなる直接定位データを入力する直接定位データ入力部と、
入力された前記直接定位データと、撮影画像の重複領域に指定されたタイポイントとに基づく同時調整計算により、複数の撮影画像を調整して連結させたブロックを求めた後、測量範囲に配置された適数の地上基準点に基づいて前記ブロックを幾何補正して外部標定要素及び求点座標を得るブロック調整部とを有する空中写真測量装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−322170(P2007−322170A)
【公開日】平成19年12月13日(2007.12.13)
【国際特許分類】
【出願番号】特願2006−150438(P2006−150438)
【出願日】平成18年5月30日(2006.5.30)
【出願人】(000135771)株式会社パスコ (102)
【公開日】平成19年12月13日(2007.12.13)
【国際特許分類】
【出願日】平成18年5月30日(2006.5.30)
【出願人】(000135771)株式会社パスコ (102)
[ Back to top ]