
空中写真画像データの対応点設定方法及び対応点設定装置並びに対応点設定プログラム
【課題】空中写真画像データ同士の対応点を精度良く自動で設定することを可能にする空中写真画像データの対応点設定方法及び対応点設定装置並びに対応点設定プログラムを提供する。
【解決手段】第1空中写真画像データ及び第2空中写真画像データの共通特徴点の座標位置及び外部標定要素から三角測量の原理に基づいて共通特徴点の3次元空間における座標位置を算出し、このときの座標位置が第3空中写真画像データに投影される投影位置を算出し、投影位置を含む探索領域を第3空中写真画像データに設定し、探索領域に対して共通特徴点でパターンマッチングし、マッチング率が閾値以上で最も高いときの座標位置から投影位置までの誤差ベクトルを算出し、誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出し、誤差ベクトルが最頻誤差ベクトルとなる位置の投影位置に最頻誤差ベクトルを加えた位置を共通特徴点に対応する対応点に設定するようにした。
【解決手段】第1空中写真画像データ及び第2空中写真画像データの共通特徴点の座標位置及び外部標定要素から三角測量の原理に基づいて共通特徴点の3次元空間における座標位置を算出し、このときの座標位置が第3空中写真画像データに投影される投影位置を算出し、投影位置を含む探索領域を第3空中写真画像データに設定し、探索領域に対して共通特徴点でパターンマッチングし、マッチング率が閾値以上で最も高いときの座標位置から投影位置までの誤差ベクトルを算出し、誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出し、誤差ベクトルが最頻誤差ベクトルとなる位置の投影位置に最頻誤差ベクトルを加えた位置を共通特徴点に対応する対応点に設定するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、空中測量において、航空機から地物を撮影した空中写真画像データから互いに対応する対応点を自動的に検出する空中写真画像データの対応点設定方法及び対応点設定装置並びに対応点設定プログラムに関する。
【背景技術】
【0002】
従来、空中三角測量は、空中写真測量のために撮影した写真画像を撮影した位置と姿勢を精密に求める手法であり、図8に示すように、所定の高度で飛行する航空機から目標とする対象エリアの地物を隈なく撮影し、撮影した画像(空中写真画像データI)を画像処理することにより行われる。航空機による撮影は、飛行方向に連続して撮影される空中写真画像データIや、隣接する飛行コース1,2,3において撮影される空中写真画像データIの間で対応する点を計測し、空中写真画像データIに含まれる座標既知点の情報も併せてバンドル調整等のブロック調整方によって撮影した画像と地物の絶対的な位置関係を定めている。例えば、飛行方向に沿って連続して撮影される空中写真画像データは、互いに重複割合が60%以上となるように撮影され、異なる飛行コースにおいて撮影された空中写真画像データ同士は互いに重複割合が30%以上となるように撮影される。図9に示すように、撮影した空中写真画像データには、GPSによって計測された撮影位置とIMUによって計測された地物に対するカメラの姿勢との外部標定要素が紐付けされることが多いが、計測された外部標定要素では最終的に空中写真測量を行うには十分な精度を持たないため、画像の間で対応する点を計測し、空中三角測量を行う必要がある。そして、空中写真画像データの互いに重複する領域に含まれる共通対象物から抽出した特徴点同士が対応する対応点を求め、バンドル調整等のブロック調整法によって外部標定要素の同時調整計測を行うことで上記の計測された外部標定要素をさらに精密に決定する。このように精密に決定された外部標定要素を用いることにより、三角測量の原理に基づいて、互いに重複する空中写真画像データから地物の3次元空間内の位置を決定することが可能となる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−323603号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、飛行方向に沿って撮影したときのように、互いに重複する割合がある程度大きいときには空中写真画像データ同士の対応点を設定し易いが、異なる飛行コース同士で隣接するときの空中写真画像データのように重複する割合が小さいときには対応点の設定に困難さが生じ易い。即ち、空中写真画像データにおいて重複割合が大きいときには航空機の移動距離が小さいため撮影対象となる地物の見え方の変化が小さいが、重複割合が小さいときは航空機の移動距離が大きいため撮影対象となる地物の見え方の変化が大きくなり、同一の対象物であっても撮影によって取得された空中写真画像データでは見え方が大きく異なることで、同一の対象物から特徴点を抽出しても同一の地物であると認識されずに対応点として設定されない場合がある。また、異なる対象物から抽出された特徴点であるにも関わらず、特徴点の配置が似ていることで同一の地物として認識され、対応点として設定されてしまう場合がある。特に、類似する景色が広がる森林や、傾斜が大きい山岳部では、対象となる地物の見え方が直ちに変化してしまうため、自動的に対応点を設定することが困難となっている。
このように、自動的に対応点を設定することができない場合には、オペレータが目視により画像を比較することで、対応点を設定する必要があり、作業に熟練度と時間とが必要であった。
【0005】
本発明は、本発明は上記課題を解決すべく、空中写真画像データ同士の対応点を精度良く自動で設定することを可能にする空中写真画像データの対応点設定方法及び対応点設定装置並びに対応点設定プログラムを提供する。
【課題を解決するための手段】
【0006】
上記課題を解決するための空中写真画像データの対応点設定方法の第1の態様として、撮影位置と撮影姿勢とを含む外部標定要素が紐付けされ、互いに重複する領域において互いに共通する共通特徴点の座標位置が予め設定された第1空中写真画像データ及び第2空中写真画像データと、第1空中写真画像データ及び第2空中写真画像データが重複する割合よりも小さい割合で第1空中写真画像データ及び第2空中写真画像データに対して重複する第3空中写真画像データとから互いに共通する対応点を設定する空中写真画像データの対応点設定方法であって、第1空中写真画像データ及び第2空中写真画像データの共通特徴点の座標位置及び第1空中写真画像データ及び第2空中写真画像データを撮影したときの外部標定要素から三角測量の原理に基づいて共通特徴点の3次元空間における座標位置を算出するステップと、第3空中写真画像データを撮影したときの座標位置と、共通特徴点の3次元空間における座標位置とを結ぶ直線が第3空中写真画像データに交差する共通特徴点の第3空中写真画像データへの投影位置を算出するステップと、投影位置を含む所定の大きさの探索領域を第3空中写真画像データに設定するステップと、探索領域に対して共通特徴点をパターンマッチングし、マッチング率が閾値以上で最も高いマッチング率でマッチングしたときの探索領域における座標位置から投影位置までの位置ずれ量及び位置ずれ方向を算出し、誤差ベクトルとして設定するステップと、誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出するステップと、誤差ベクトルが最頻誤差ベクトルとなる位置の投影位置に最頻誤差ベクトルを加えた位置を共通特徴点に対応する対応点に設定するステップとを含む態様とした。
本態様によれば、予め位置関係が特定された第1空中写真画像データ及び第2空中写真画像データに共通の共通特徴点のカメラ座標上の座標位置と、第1空中写真画像データと第2空中写真画像データとを撮影したときの外部標定要素として記憶される3次元空間における撮影位置及び撮影姿勢の関係から三角測量の原理に基づいて共通特徴点の実際の3次元空間における座標位置を算出することができる。さらに、算出された共通特徴点の3次元空間における座標位置と、第3空中写真画像データを撮影したときの外部標定要素として記憶される3次元空間における撮影位置とを結ぶ直線が第3空中写真画像データと交差する共通特徴点の第3空中写真画像データへの投影位置を算出し、投影位置を含む探索領域を第3空中写真画像データに設定し、投影された共通特徴点により探索領域をパターンマッチングし、マッチング率が閾値以上でマッチングする点の中で最もマッチング率が高い探索領域における位置から投影位置までの位置ずれ量及び位置ずれ方向を算出して誤差ベクトルとして設定し、誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出して投影位置に最頻誤差ベクトルを加えることで、第3空中写真画像データ位置を共通特徴点に対応する対応点を算出することができる。
【0007】
また、上記課題を解決するための空中写真画像データの対応点設定方法の第2の態様として、共通特徴点は、第2空中写真画像データ及び第3空中写真画像データと重複する第1空中写真画像データの領域から所定の大きさの第1サンプル領域を抽出し、第1サンプル領域に対応する第2サンプル領域を第2空中写真画像データから特定するステップと、第1サンプル領域及び第2サンプル領域に表わされた地物の形状のうち特徴のある形状を特徴点抽出フィルタにより第1特徴点及び第2特徴点としてそれぞれ抽出し、抽出された第1特徴点を第2特徴点に対してパターンマッチングして第1特徴点に一致する第2特徴点を検出し、第1特徴点と第2特徴点とを共通特徴点に設定するステップとにより設定される態様とした。
本態様によれば、第2空中写真画像データと重複する第1空中写真画像データの領域から所定の大きさの第1サンプル領域を抽出し、第1サンプル領域に対応する第2サンプル領域を第2空中写真画像データから特定して得られた第1サンプル領域と第2サンプル領域に表わされた地物に対して、所定の特徴点抽出フィルタによって特徴点の位置を抽出し、第1サンプル領域において抽出された点を第1特徴点、第2サンプル領域において抽出された点を第2特徴点として設定し、第1サンプル領域及び第2サンプル領域に共通する共通特徴点を第1特徴点と第2特徴点とから検出することにより、第1空中写真画像データと第2空中写真画像データとの位置関係を特定することができる。
【0008】
上記課題を解決するための空中写真画像データの対応点設定装置の第1の構成として、撮影位置と撮影姿勢とを含む外部標定要素が紐付けされ、互いに重複する領域において互いに共通する共通特徴点の座標位置が予め設定された第1空中写真画像データ及び第2空中写真画像データと、第1空中写真画像データ及び第2空中写真画像データが重複する割合よりも小さい割合で第1空中写真画像データ及び第2空中写真画像データに対して重複する第3空中写真画像データとから互いに共通する対応点を設定する空中写真画像データの対応点設定装置であって、第1空中写真画像データ及び第2空中写真画像データの共通特徴点の座標位置及び第1空中写真画像データ及び第2空中写真画像データを撮影したときの外部標定要素から三角測量の原理に基づいて共通特徴点の3次元空間における座標位置を算出する共通特徴点座標位置算出手段と、第3空中写真画像データを撮影したときの座標位置と、共通特徴点の3次元空間における座標位置とを結ぶ直線が第3空中写真画像データに交差する共通特徴点の第3空中写真画像データへの投影位置を算出する特徴点投影座標位置算出手段と、投影位置を含む所定の大きさの探索領域を第3空中写真画像データに設定する探索領域設定手段と、探索領域に対して共通特徴点をパターンマッチングし、マッチング率が閾値以上で最も高いマッチング率でマッチングしたときの探索領域における座標位置から投影位置までの位置ずれ量及び位置ずれ方向を算出し、誤差ベクトルとして設定する誤差ベクトル算出手段と、誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出する最頻誤差ベクトル検出手段と、誤差ベクトルが最頻誤差ベクトルとなる位置の投影位置に最頻誤差ベクトルを加えた位置を共通特徴点に対応する対応点に設定する対応点設定手段とを備える構成とした。
本構成によれば、上記第1の方法と同様の効果を得ることができる。
【0009】
また、上記課題を解決するための空中写真画像データの対応点設定装置の第2の構成として、共通特徴点は、第2空中写真画像データと重複する第1空中写真画像データの領域から所定の大きさの第1サンプル領域を抽出し、第1サンプル領域に対応する第2サンプル領域を第2空中写真画像データから特定するサンプル領域設定手段と、第1サンプル領域及び第2サンプル領域に表わされた地物の形状のうち特徴のある形状を特徴点抽出フィルタにより第1特徴点及び第2特徴点としてそれぞれ抽出し、抽出された第1特徴点を第2特徴点に対してパターンマッチングして第1特徴点に一致する第2特徴点を検出し、第1特徴点と第2特徴点とを共通特徴点に設定する共通特徴点検出手段とにより設定される構成とした。
本構成によれば、上記第2の方法と同様の効果を得ることができる。
【0010】
上記課題を解決するための空中写真画像データの対応点設定プログラムの態様として、請求項1又は請求項2記載の処理をコンピュータにより実行させる態様とした。
本態様によれば、上記第1の方法又は第2の方法と同様の効果を得ることができる。
【0011】
なお、上記発明の概要は、本発明の必要な全ての特徴を列挙したものではなく、これらの特徴群のサブコンビネーションもまた、発明となり得る。
【図面の簡単な説明】
【0012】
【図1】対応点設定装置の概略構成図である。
【図2】サンプル領域において抽出された特徴点の一例を示す図である。
【図3】空中三角測量の概念図である。
【図4】誤差ベクトルの算出を示す概念図である。
【図5】投影点から延長する誤差ベクトル群を示す図である。
【図6】空中写真画像データとファイル番号を示す図である。
【図7】対応点設定装置に記憶されたプログラムのフローチャートを示す図である。
【図8】空中写真画像データの取得概念図である。
【図9】空中写真における幾何を示す図である。
【図10】対応点設定装置の他の形態の概略構成図である。
【0013】
以下、実施の形態を通じて本発明を詳説するが、以下の実施の形態は特許請求の範囲に係る発明を限定するものではなく、また、実施の形態の中で説明される特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【発明を実施するための形態】
【0014】
実施形態1
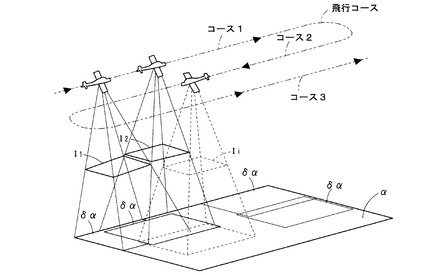
図8に示すように、空中写真測量は、測量する対象エリアαを略均等な大きさの複数の領域δαに分け、各領域δαを航空機からカメラにより撮影し、撮影された空中写真を画像処理することで行われる。具体的には、図中の2点鎖線で示すような複数のコース1,2,3からなる飛行経路に沿って、所定の高度を保ちつつ飛行しながら空中から撮影される。コース1,2,3は、各コース1,2,3の延長方向を例えば東西とすれば、コース1,2,3の隣接方向がその垂直方向の南北となるように設定され、かつ、対象エリアαを必要最小限の撮影回数で撮影するように設定される。空中写真は、各コース1,2,3に沿う方向には撮影範囲が互いに約60%以上で重複するように撮影し、コース1,2或いは2,3のように異なるコース1,2,3に隣接する方向には、撮影範囲が約30%以上で重複するように撮影される。本実施形態では、各コース1,2,3の延長方向を例えば東西、コース1,2,3の隣接方向がその垂直方向の南北として設定したが、測量する対象エリアαの形状に応じて、対象エリアαを効率良く撮影できるようにコース及びコースの隣接方向を設定すれば良い。
【0015】
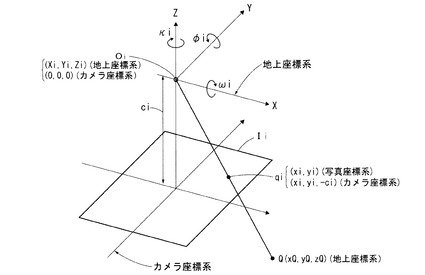
図9は、空中写真の撮影と撮影位置及び撮影姿勢の幾何関係を示す図である。
航空機には、撮影位置Oiと撮影姿勢を計測するGPS/IMU装置と、地物の撮影を行うカメラが搭載される。GPSアンテナは、空中写真測量の規定に基づいて航空機の所定の位置に取り付けられ、飛行時の緯度、経度及び高度をGPS衛星から取得する。また、5個以上のGPS衛星を捕捉可能な時間帯に撮影することで撮影位置Oiを精度良く取得することができる。なお、撮影位置Oiの添字iは、後述の空中写真画像データの番号である。本実施形態では、i=1〜21として説明する(図6参照)。
図9に示すように、GPSによって取得される撮影位置Oiの座標位置(Xi,Yi,Zi)は、地上座標系で表わされる。地上座標系は、例えば東西方向(緯線方向)をX軸、南北方向(経線方向)をY軸、地表からの高さ方向をZ軸としてデカルト座標系で表わされる。具体的には、地心座標系(地心を中心とする3次元座標系)もしくはガウス・クリューガー図法の平面座標に標高をZ方向に加えた3次元座標系を利用することが多い。
【0016】
IMUは、空中撮影に用いるカメラに装着され、航空機の飛行姿勢によって変化する撮影姿勢を計測する。具体的には、IMUは、ジャイロ及び加速度センサを備え、航空機の飛行姿勢、例えば飛行姿勢のローリングを示すω(X軸周りの回転角)、ピッチングを示すφ(Y軸周りの回転角)、ヨーイングを示すκ(Z軸周りの回転角)を計測する。つまり、IMUによって飛行姿勢を計測しておくことで、飛行姿勢が撮影に及ぼす影響を記録する。
【0017】
GPSによって計測される撮影位置Oiにおける座標位置(Xi,Yi,Zi)及びIMUによって各座標軸周りの回転角κi,φi,ωiは、撮影位置及び撮影姿勢を特定するための外部標定要素である。なお、撮影位置の座標位置(Xi,Yi,Zi)は、地上座標系である。
【0018】
カメラは、航空機の所定の位置に取り付けられる。カメラによる撮影は、光軸が地表に対して、略鉛直方向となるように行われる。例えば、カメラには地物の写真をデジタル化して取得するデジタルエリアカメラが適用される。
カメラによって撮影された空中写真は、撮影毎の外部標定要素及び焦点距離ciとともに空中写真画像データIiとしてハードディスクやメモリー等の記憶媒体2に保存される。なお、焦点距離ciは、同一のカメラで固定焦点で撮影した場合には、同一の焦点距離と見なすことができる。
撮影毎の位置及び撮影姿勢に対応する外部標定要素及び焦点距離ciは、記憶媒体2に紐付けされて記憶される。
【0019】
なお、カメラは、デジタルエリアカメラに限らず、デジタルビデオカメラ、アナログビデオカメラ、フィルムカメラ等、地物を写真として撮影可能なものであればいずれであっても良い。写真撮影後から写真の画像処理までの手間を考慮すれば、撮影した写真を画像データとして直接コンピュータに入力することができるデジタルエリアカメラ、デジタルビデオカメラ等のデジタル光学カメラを用いると良い。また光学的なひずみ(レンズディストーション)の小さいものが好ましい。以下の説明では、基本的にレンズディストーションの影響が少ない、もしくは、そのような影響が補正された画像データを利用するものとする。
【0020】
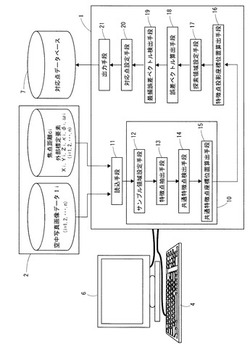
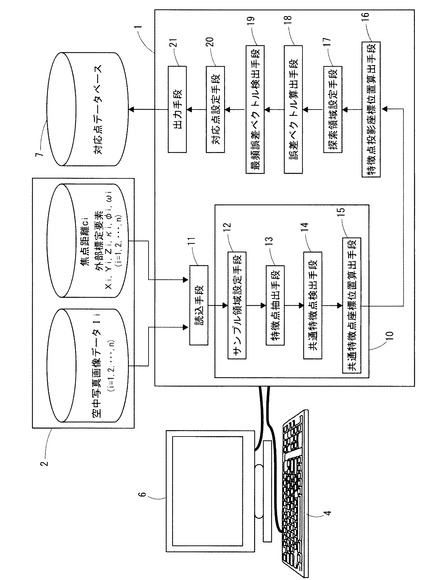
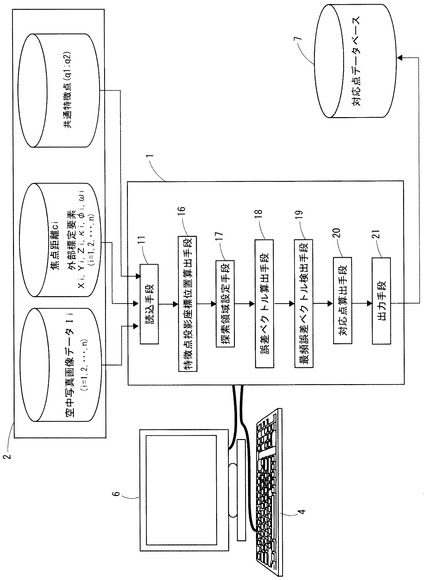
図1は、対応点設定装置1の概略構成図を示す。
記憶媒体2に保存された空中写真画像データIiは、対応点設定装置1によって空中写真画像データIi同士の対応関係が設定される。
対応点設定装置1は、地物を空中から撮影した空中写真画像データIiの重複する部分において、互いに一致する対応点を設定するための処理を実行するコンピュータであり、演算処理手段としてのCPU、記憶手段としてのROM,RAM及びHDD、通信手段としてのインターフェイスを含み、記憶手段に格納されたプログラムに従って対応点の設定処理を実行する。また、対応点設定装置1には、キーボード4やマウス等の入力手段や、モニタ6等の表示手段が接続される。
【0021】
対応点設定装置1は、読込手段11と、共通特徴点設定部10と、特徴点投影座標位置算出手段16と、探索領域設定手段17と、誤差ベクトル算出手段18と、最頻誤差ベクトル検出手段19と、対応点設定手段20と、出力手段21とを備える。
読込手段11は、記憶媒体2から空中写真画像データIi、外部標定要素(Xi,Yi,Zi,κi,φi,ωi)及び焦点距離ciの読込を行う。
【0022】
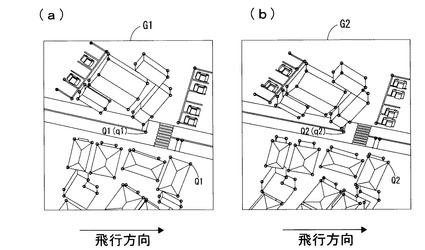
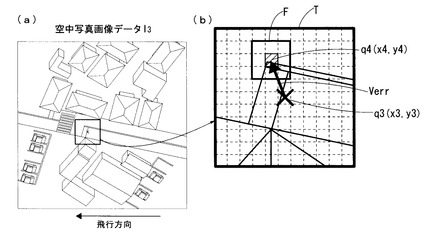
図2(a),(b)は、特徴点抽出手段13により飛行コース1に沿って互いに連続する空中写真画像データIiから抽出された第1サンプル領域G1と、空中写真画像データIi+1から第1サンプル領域G1に対応する第2サンプル領域G2とから抽出された第1及び第2特徴点Q1,Q2の一例を示す図である。以下、各飛行コースにおいて先に撮影された空中写真画像データをI1、次に撮影された空中写真画像データをI2として説明する。また、空中写真画像データI1及び空中写真画像データI2に重複する空中写真画像データをI3として説明する。
共通特徴点設定部10は、サンプル領域設定手段12と、特徴点抽出手段13と、共通特徴点検出手段14と、共通特徴点座標位置算出手段15とにより構成される。
サンプル領域設定手段12は、空中写真画像データI2と空中写真画像データI3とに重複する空中写真画像データI1の領域から所定の大きさの第1サンプル領域G1を抽出し、第1サンプル領域G1に対応する第2サンプル領域G2を第2空中写真画像データから特定する。第1サンプル領域G1を抽出する位置は、空中写真画像データI1と空中写真画像データI2との重複する割合が分かっていることから、空中写真画像データI1において空中写真画像データI2が重複する側から抽出するように設定すれば良い。例えば、空中写真画像データI1の画素座標系を考え、既知の空中写真画像データI1と空中写真画像データI2との重複する割合に基づいて重複する画素座標の範囲を空中写真画像データI1に設定する。次に、既知の空中写真画像データI1と空中写真画像データI3との重複する割合に基づいて重複する画素座標の範囲を空中写真画像データI1に設定する。そして、この範囲内から第1サンプル領域G1を設定することで、第1サンプル領域G1を空中写真画像データI1と空中写真画像データI2と空中写真画像データI3が重複する範囲から設定することができる。
なお、空中写真画像データI1と空中写真画像データI2と空中写真画像データI3とが重複する範囲から第1サンプル領域G1を設定する方法は、上記に限定されず、結果として空中写真画像データI1と空中写真画像データI2と空中写真画像データI3とが重複する範囲から第1サンプル領域G1が設定されるようにすれば良い。
また、第2サンプル領域G2の抽出には、第1サンプル領域G1に対応する位置を第2空中写真画像データI2内からパターンマッチング等の手法により抽出すれば良い。
第1サンプル領域G1の大きさは、例えば、空中写真画像データI1の大きさを10000画素×10000画素とした場合、全体の1/1000〜1/10000程度に分割される。空中写真画像データI1を画素数において、辺々を200分割した場合には、元の空中写真画像データIの1/4000の大きさとなり、第1サンプル領域G1の大きさは50画素×50画素に設定される。
【0023】
特徴点抽出手段13は、図2(a),(b)において丸印で示すように、画像に表わされる地物から特徴点Qiを抽出する特徴点抽出フィルタを備え、空中写真画像データI1の第1サンプル領域G1及び空中写真画像データI2の第2サンプル領域G2に表わされる地物、例えば建物の角、道路の白線の角、地形の角のように周囲に対して明瞭な特徴となる第1及び第2特徴点Q1,Q2として抽出する。具体的な特徴点抽出フィルタには、例えば、Foerstnerフィルタ、SUSANフィルタ、FASTフィルタ等が適用される。
【0024】
共通特徴点検出手段14は、第1サンプル領域G1と第2サンプル領域G2から共通する共通特徴点(q1;q2)を検出する。共通特徴点検出手段14は、空中写真画像データI1の第1サンプル領域G1に含まれる複数の第1特徴点Q1と第2サンプル領域G2に含まれる第2特徴点Q2とをパターンマッチングすることにより共通の特徴点である共通特徴点(q1;q2)を検出する。なお、パターンマッチングでは、第1サンプル領域G1を回転角(κ1,φ1,ω1)により補正し、第2サンプル領域G2を回転角(κ2,φ2,ω2)により補正した状態で第1特徴点Q1と第2特徴点Q2とに共通の共通特徴点(q1;q2)を検出する。つまり、第1サンプル領域G1と第2サンプル領域G2から検出された共通特徴点(q1;q2)は、空中写真画像データI1と空中写真画像データI2との対応点である。
【0025】
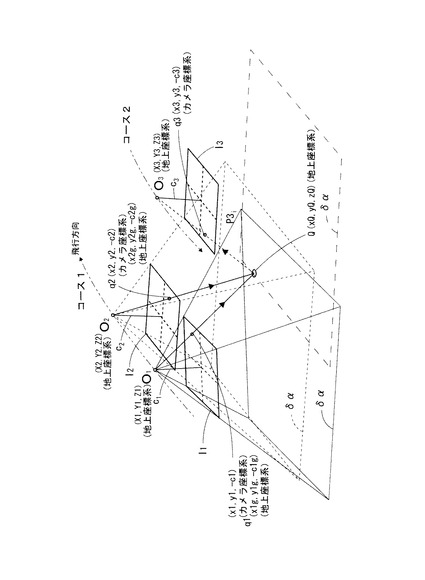
図3は、3次元空間における空中写真画像データI1と空中写真画像データI2及び空中写真画像データI3の関係を示す図である。
共通特徴点座標位置算出手段15は、共通特徴点検出手段14により検出された共通特徴点(q1;q2)の実際の地物、点Qの地上座標系における座標位置(xQ,yQ,zQ)を算出する。共通特徴点(q1;q2)の位置は、空中写真画像データI1の写真座標及び空中写真画像データI2の写真座標からそれぞれ既知であるので、焦点距離c1及びc2を用いて写真座標系からカメラ座標系に変換し、外部標定要素の(X1,Y1,Z1,κ1,φ1,ω1)及び(X2,Y2,Z2,κ2,φ2,ω2)を用いてカメラ座標系から地上座標系に変換することで、地上座標上の座標位置(xQ,yQ,zQ)が算出される。
【0026】
以下、共通特徴点座標位置算出手段15により共通特徴点(q1;q2)の地上座標系における座標位置(xQ,yQ,zQ)を算出する方法について具体的に説明する。特徴点q1と特徴点q2とは、地物の同一の点Qが撮影されたものであるので、特徴点q1及び特徴点q2から点Qの座標位置(xQ,yQ,zQ)は以下のように算出される。
空中写真画像データI1において特徴点q1の写真座標系における座標位置は(x1,y1)、空中写真画像データI2において特徴点q2の写真座標系における座標位置は(x2,y2)と表わされる。特徴点q1の座標位置(x1,y1)及び特徴点q2の座標位置(x2,y2)は、実際には、カメラの撮影中心から焦点距離c1,c2だけ離間した撮影面に投影されたものであるから、撮影位置O1,O2の座標位置を撮影中心とし、撮影中心O1,O2をそれぞれのカメラ座標系の原点とすれば、カメラ座標において、特徴点q1は座標位置(x1,y1,−c1)、特徴点q2は座標位置(x2,y2,−c2)と表わされる。なお、撮影位置O1,O2の地上座標系おける座標位置は、撮影時の外部標定要素によって与えられ、具体的には、撮影位置O1は座標位置(X1,Y1,Z1)、撮影位置O2は座標位置(X2,Y2,Z2)である。
【0027】
よって、Q(xQ,yQ,zQ)は、空中写真画像データI1の撮影中心O1と、空中写真画像データI2の撮影中心O2と特徴点q1,q2との関係から、前方交差法等の三角測量の原理から求めることができる。例えば以下の式(1)によりQ(xQ,yQ,zQ)を求めることができる。
u1・(Q−O1)・u1−Q=−(u2・(Q−O2)・u2−Q) …式(1)
u1=R1−1・q1/|q1| …式(2)
u2=R2−1・q2/|q2| …式(3)
ここで、式(2)に示すu1は撮影位置O1から特徴点q1に向かう単位ベクトルを地上座標系で表わしたものであり、式(3)に示すu2は撮影位置O2から特徴点q2に向かう単位ベクトルを地上座標系で表わしたものである。また、R1,R2は、撮影姿勢を表わす回転角(κ1,φ1,ω1)、(κ2,φ2,ω2)によって設定されるカメラ座標系から地上座標系へ座標系を変換する変換行列(回転行列)であり、R1−1及びR2−1は、地上座標系からカメラ座標系へ座標変換する変換行列で、R1及びR2の逆行列である。
【0028】
特徴点投影座標位置算出手段16は、共通特徴点(q1;q2)が空中写真画像データI3に投影されたときの投影点q3の写真座標系での座標位置(x3,y3)を算出する。具体的には、共通特徴点座標位置算出手段15により算出された点Qの座標位置(xQ,yQ,zQ)と、撮影中心O3の座標位置(X3,Y3,Z3)と、投影点q3の座標位置との共線条件に基づいて算出される。
共通特徴点(q1;q2)が投影された空中写真画像データI3における投影点q3は、カメラ座標系で座標位置(x3,y3,z3)とすると、(x3,y3,z3)=R3・(Q−O3)の関係から算出される。R3は、撮影中心O3における撮影姿勢を表わす外部標定要素の回転角(κ3,φ3,ω3)によって設定されるカメラ座標系から地上座標系へ空中写真画像データI3上の点を座標変換する変換行列(回転行列)である。つまり、撮影中心O3をカメラ座標系の原点として投影点q3の座標位置(x3,y3,z3)を位置ベクトルと見なせば、位置ベクトル(x3,y3,z3)を実数倍したZ方向の座標位置が焦点距離c3と一致するときがカメラ座標における投影点q3の座標位置であるから、投影点q3のカメラ座標上の座標位置(x3,y3,−c3)におけるx3,y3は、
x3=−c3・(x3/z3)
y3=−c3・(y3/z3)
により求めることができる。つまり、撮影中心O3と投影点q3とを結ぶ線分の空中写真画像データI3への射影によって投影点q3の写真座標系での座標位置(x3,y3)が算出される。従って、カメラ座標系における投影点q3の座標位置(x3,y3,−c3)が算出される。
【0029】
このように、算出された投影点q3の座標位置(x3,y3,−c3)は、投影点q3と、撮影中心O3と、点Qの座標位置(xQ,yQ,zQ)との共線条件から数学的に算出されたものであるが、計測された外部標定要素、即ち、空中写真画像データI3を撮影したときの撮影中心O3の座標位置(X3,Y3,Z3)及び撮影姿勢を示す回転角(κ3,φ3,ω3)が誤差を含んでいるため、空中写真画像データI3において共通特徴点(q1;q2)に対応する対応点としての正しい位置に対して誤差が生じている。外部標定要素の計測精度が十分高い場合においても、特徴点投影座標位置算出手段16によって算出された空中写真画像データI3の投影点q3の写真座標系における座標位置(x3,y3)は、共通特徴点(q1;q2)が正しく対応する位置に比べて微小のズレが生じる。この微小のズレは、全ての共通特徴点(q1;q2)が投影された投影点q3において、正しいと思われる位置から同一方向に変位した平行移動として表れることが分かっている。
【0030】
探索領域設定手段17では、図4(a),(b)に示すように、特徴点投影座標位置算出手段16により空中写真画像データI3に投影された投影点q3周りに所定の大きさの探索領域Tを設定する。探索領域Tは、投影点q3が中心に位置するように、所定の大きさの例えば矩形領域で設定される。探索領域Tの大きさは、外部標定要素の計測精度を超えない範囲の大きさ、言い換えると、写真座標系における投影点q3の座標位置(x3,y3)と、投影点q3が空中写真画像データI3において共通特徴点(q1;q2)に正しく対応する位置との微小のズレよりも大きく設定される。
なお、空中写真画像データI1,I2,I3の撮影時に取得される外部標定要素の測定精度が高ければ、探索領域Tの大きさを小さく、測定精度に不安のある場合にはやや探索領域を大きめに設定すると良い。
【0031】
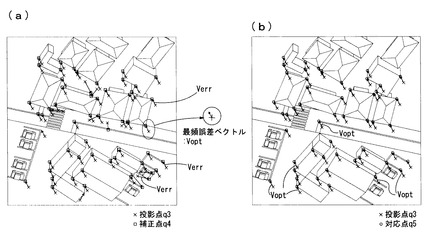
誤差ベクトル算出手段18は、投影点q3を含む探索領域Tに対して、投影された共通特徴点(q1;q2)の特徴点q1又は特徴点q2のパターンによりパターンマッチングし、マッチング率が予め設定された閾値以上でマッチングする点の中でマッチング率が最大となる位置を探索領域Tから探索する。なお、パターンマッチングでは、特徴点q1又は特徴点q2のパターンを外部標定要素の回転角(κ1,φ1,ω1)又は回転角(κ2,φ2,ω2)によりそれぞれ補正し、探索領域Tを回転角(κ3,φ3,ω3)により補正したもの同士について行う。そして、マッチング率が最大となる位置と、投影点q3の位置との距離及び方向を算出する。マッチング率には、パターンマッチングで良く一致すればするほど高い値を出力するときの位置を使用する。例えば空中写真画像データI1において特徴点q1を囲む画素と、探索領域T内のある画素を囲む画素間の相関係数を算出すれば良い。そして、マッチング率が閾値以上の値で最大となったときの位置を補正点q4の座標位置(x4,y4)とし、補正点q4の座標位置(x4,y4)と投影点q3の座標位置(x3,y3)との位置ずれ量及び位置ずれ方向を算出する。つまり、誤差ベクトル算出手段18は、投影された投影点q3の座標位置(x3,y3)から最も正しいと思われる補正点q4の座標位置(x4,y4)への誤差ベクトルVerr=(x4−x3,y4−y3)を算出する。誤差ベクトルは投影点q3が始点で補正点q4が終点である。そして、空中写真画像データI1及びI2において共通する全ての共通特徴点(q1;q2)に対して誤差ベクトルVerrを算出することにより、図5に示すように、複数の誤差ベクトルVerr群を算出する。
【0032】
最頻誤差ベクトル検出手段19は、誤差ベクトル算出手段18により算出された誤差ベクトルVerr群のうち、探索領域T内において最も多く頻出する誤差ベクトルVerrを最頻誤差ベクトルVoptとして探索する。外部標定要素の誤差が小さいとき、画像内の局所領域においては、この誤差は、一定方向に一定量になることが数学的に導くことができる。即ち、正しくマッチングしているところは同じ誤差ベクトルを有していると予測することができる。よって最頻誤差ベクトルVoptとなっているところは、正しくマッチングしていると判断できる。
【0033】
対応点設定手段20は、最頻誤差ベクトルVoptと同じ誤差ベクトルとなる投影点q3に最頻誤差ベクトルVoptを加えた位置、即ち補正点q4の位置を共通特徴点(q1;q2)に対応する対応点q5の座標位置(x5,y5)として算出する。つまり、算出された対応点q5は、空中写真画像データI1,I2,I3に共通の対応点として設定される。
【0034】
出力手段21は、対応点設定手段20によって算出された対応点q5の座標位置(x5,y5)と、これに対応する第1特徴点Q1の座標位置(x1,y1)と、第2特徴点Q2の座標位置(x2,y2)とを紐付けし、記憶媒体としての対応点データベース7に出力する。
【0035】
従って、空中写真画像データI1及びI2に共通特徴点(q1;q2)である対応点を空中写真画像データI3に投影し、上記誤差ベクトルVerrを用いて、統計的に正しいと思われる最頻誤差ベクトルVoptを投影点q3に加えて補正を行うことで簡単に空中写真画像データI1,I2に対応する対応点q5の座標位置(x5,y5)を自動で設定することができる。また、空中写真画像データI1,I2から抽出された複数の共通特徴点(q1;q2)毎に投影された投影点q3群によって誤差ベクトルVerr群を算出し、誤差ベクトルVerr群のうち最頻の最頻誤差ベクトルVoptを検出すること、言い換えると、誤差ベクトルVerr群のうち統計的に最も多い最頻誤差ベクトルVoptを検出し、当該最頻誤差ベクトルVoptにより空中写真画像データI1に対する空中写真画像データI3の投影点q3のズレを補正するので、空中写真画像データI1と空中写真画像データI3との重複が少なくても、空中写真画像データI1,I3の互いに対応する対応点を確実に特定することができる。
【0036】
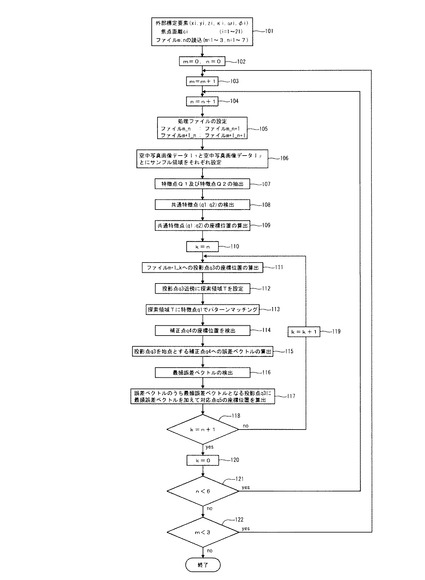
以下、対応点設定装置1による対応点の設定方法の一実施形態についてフローチャートを用いて説明する。
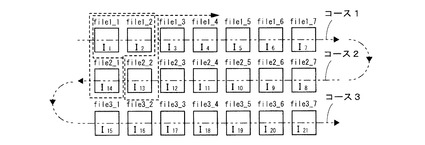
撮影された空中写真画像データIi(i=1〜21)は、コース番号m(m=1〜3)と、各コース1,2,3において撮影した撮影番号n(n=1〜7)の2つの番号がファイル番号として付され、空中写真画像データファイルm_nとして記憶媒体2に記憶されている。具体的には、図6に示すように、例えば、コース1の場合にはファイル1_1,1_2,・・・、コース2の場合にはファイル2_1,2_2,・・・、コース3の場合にはファイル3_1,3_2,・・・等のように付されている。
【0037】
対応点設定装置1を起動すると、記憶手段に記憶されたプログラムによって画面が表示される。画面には、処理を行う空中写真画像データファイルm_nの読み込みボタンや、処理変数の設定ボタン等が配置され、マウスやキーボードにより入力設定される。入力設定が完了すると、画面には、対応点の設定を開始するファイル名と、これに対応する焦点距離と外部標定要素とが数値として表示される。そして、対応点の設定開始を指示すると、まず、読込手段11により全ての空中写真画像データファイルm_nに記憶される空中写真画像データIiの読込が行われる(ステップ101)。
【0038】
以下の処理は、ファイル番号m_nによって管理されるものとして説明する。
まず、処理を行うファイルのコース番号mと、撮影番号nとをリセットする(ステップ102)。次に、コース番号mを1に設定し(ステップ103)、次に、撮影番号nを1に設定する(ステップ104)。次に、設定されたコース番号m及び撮影番号nにより、処理するファイルの設定を行う。例えば、飛行方向に隣接するファイルm_n,ファイルm_n+1、異なる飛行コースにおいてファイルm_n及びファイルm_n+1に重複するファイルm+1_n、及びファイルm_n及びファイルm_n+1に重複するファイルm+1_n+1とが設定される(ステップ105)。具体的には、m=1,n=1から開始され、ファイル1_1に対応する空中写真画像データI1と、ファイル1_2に対応する空中写真画像データI2とファイル2_1に対応する空中写真画像データI14との対応点の設定、及びファイル1_1に対応する空中写真画像データI1とファイル1_2に対応する空中写真画像データI2とファイル2_2に対応する空中写真画像データI13との対応点の設定から行われる(図6参照)。即ち、本実施形態では、空中写真画像データI1とI2とI14とが重複する領域と、空中写真画像データI1とI2とI13とが重複する領域とは、略同一と見なすことができるので、空中写真画像データI14とI13とに共通に重複する空中写真画像データI1とI2とで設定された共通特徴点(q1;q2)を用いて空中写真画像データI14とI13との対応点をそれぞれ算出するようにした。
【0039】
次に、サンプル領域設定手段12により空中写真画像データI1の空中写真画像データI2、空中写真画像データI14及び空中写真画像データI13と重複する領域から所定の大きさの第1サンプル領域G1を抽出し、空中写真画像データI2に対して第1サンプル領域G1でパターンマッチングを行い空中写真画像データI2から第1サンプル領域G1に対応する第2サンプル領域G2を特定することで、空中写真画像データI1と、空中写真画像データI2とに互いに対応するサンプル領域を設定する(ステップ106)。
【0040】
次に、特徴点抽出手段13の特徴点抽出フィルタにより、空中写真画像データI1に表される地物から複数の第1特徴点Q1、空中写真画像データI2に表される地物から複数の第2特徴点Q2を抽出する。抽出された複数の第1特徴点Q1及び第2特徴点Q2は、空中写真画像データI1及び空中写真画像データI2の各写真座標における座標位置(x1,y1)及び座標位置(x2,y2)として記憶される(ステップ107)。
【0041】
次に、共通特徴点検出手段14により、複数の第1特徴点Q1を複数の第2特徴点Q2に対してパターンマッチングを行い、共通特徴点(q1;q2)の検出を行う。言い換えれば、共通特徴点検出手段14では、空中写真画像データI1及び空中写真画像データI2に表れる共通の点Qの検出を行う(ステップ108)。
【0042】
次に、共通特徴点座標位置算出手段15により、共通特徴点(q1;q2)の地上座標系における点Qの座標位置(xQ,yQ,zQ)を算出する(ステップ109)。具体的には、共通特徴点(q1;q2)の一つである第1特徴点Q1を含む空中写真画像データI1の撮影時の焦点距離c1を用いて、写真座標系の座標位置(x1,y1)から撮影位置O1を原点とするカメラ座標系の座標位置(x1,y1,−c1)に変換し、外部標定要素の回転角(κ1,φ1,ω1)から得られる変換行列R1によりカメラ座標系を地上座標系の座標位置(x1g,y1g,−c1g)に変換する。また、共通特徴点(q1;q2)のもう一つの第2特徴点Q2を含む空中写真画像データI2の撮影時の内部標定要素である焦点距離c2を用いて、写真座標系の座標位置(x2,y2)から撮影位置O2を原点とするカメラ座標系の座標位置(x2,y2,−c2)に変換し、外部標定要素の回転角(κ2,φ2,ω2)から得られる変換行列R2によりカメラ座標系を地上座標系の座標位置(x2g,y2g,−c2g)に変換する。
【0043】
そして、地上座標系の座標位置として外部標定要素として測定された撮影位置O1(X1,Y1,Z1)と第1特徴点Q1の座標位置(x1g,y1g,−c1g)と点Qの座標位置(xQ,yQ,ZQ)との共線条件、地上座標系の座標位置として外部標定要素として測定された撮影位置O2の座標位置(X2,Y2,Z2)と第2特徴点Q2の座標位置(x2g,y2g,−c2g)と点Qの座標位置(xQ,yQ,ZQ)から三角測量の原理で地上座標系における点Qの座標位置(xQ,yQ,zQ)を算出する。
【0044】
次に、空中写真画像データI1及び空中写真画像データI2に重複する空中写真画像データI14又は空中写真画像データI13を呼び出すために、画像番号nを制御変数kに置き換える。(ステップ110)。
次に、ステップ110により制御変数kにより空中写真画像データI14の呼び出しを行い、特徴点投影座標算出手段16により、共通特徴点(q1;q2)が空中写真画像データI14に投影されたときの写真座標系での投影点q3の投影座標位置を算出する(ステップ111)。具体的には、地上座標系における空中写真画像データI14を撮影したときの撮影位置O14と共通特徴点(q1;q2)により算出された点Qの座標位置(xQ,yQ,zQ)とを結ぶ直線が空中写真画像データI14と交差するときの交点である投影点q3の写真座標系における座標位置(x3,y3)を算出する。
【0045】
次に、探索領域設定手段17により、投影点q3周りに所定の大きさの探索領域Tを設定する(ステップ112)。
次に、誤差ベクトル算出手段18により、投影点q3を含む探索領域Tに対して、投影された特徴点Q1(Q2)自身をテンプレートFとしてパターンマッチングし(ステップ113)、マッチング率が閾値以上で最も高いマッチング率でマッチングしたときの座標位置を補正点q4として探索領域Tから検出する(ステップ114)。そして、補正点q4の位置と、投影点q3の位置との位置ずれ量及び位置ずれ方向を算出し、誤差ベクトルVerrとして出力する(ステップ115)。
【0046】
次に、最頻誤差ベクトル検出手段19により、誤差ベクトルVerrのうち探索領域T内において最も多く頻出する誤差ベクトルVerrを最頻誤差ベクトルVoptとして検出する(ステップ116)。
次に、対応点設定手段20により、誤差ベクトルVerrが最頻誤差ベクトルVoptとなる投影点q3に最頻誤差ベクトルVoptを加えた位置を共通特徴点(q1;q2)に対応する対応点q5の座標位置(x5,y5)として算出する(ステップ117)。つまり、対応点q5は、空中写真画像データI1,I2,I14に共通のものとして設定される。
次に、空中写真画像データを呼び出す制御変数kが撮影番号n+1と等しいかどうかの判定を行い、制御変数kの値が撮影番号n+1と異なる場合にはステップ119に移行し、制御変数kの値が、撮影番号n+1と等しい場合にはステップ120に移行する(ステップ118)。
制御変数kの値が撮影番号n+1と異なる場合にはステップ119に移行して、制御変数kの値を更新し、制御変数k+1に置き換え(ステップ119)、ステップ111に戻り、ファイル2_2の空中写真画像データI13の処理をステップ111〜ステップ117までを繰り返し行い、空中写真画像データI1,I2,I13に共通の対応点を設定する。
次に、ステップ118により、撮影番号n+1と等しいと判定された場合には、ステップ120により制御変数kを0(ゼロ)にリセットする(ステップ120)。
次に、撮影番号nが6よりも小さいかどうかの判定を行い、撮影番号nが6よりも小さい場合には、ステップ104に戻り、撮影番号nをn+1に更新し、ステップ105〜ステップ120を行い、撮影番号nが6になるまでステップ104〜ステップ120までを繰り返し行う。また、撮影番号nが6となった場合には、ステップ122に移行する(ステップ121)。
次に、コース番号が3よりも小さいかどうかの判定を行い、コース番号が3よりも小さい場合には、ステップ103に戻り、撮影番号mをm+1に更新し、ステップ104〜ステップ121を行い、コース番号mが3になるまでステップ103〜ステップ121までを繰り返し行う。また、コース番号mが3となった場合には、互いに重複する全ての空中写真画像データI同士において設定された対応点を出力手段21を介して対応点データベース7に出力して終了する(ステップ122)。
【0047】
なお、空中写真画像データは、デジタルエリアカメラによって記録された地物の画像に限らず、アナログカメラによって撮影されたフィルムからフィルムスキャナによってデジタル化されたものであっても良い。
また、上記実施形態では、図6に示すように、コース方向に互いに重複する空中写真画像データI1及び空中写真画像データI2と、コース並び方向において空中写真画像データI1及び空中写真画像データI2が重複する割合よりも小さい割合で空中写真画像データI1及び空中写真画像データI2に対して重複する空中写真画像データI14又は空中写真画像データI13とに共通する対応点を設定するとして説明したが、上記方法によれば、空中写真画像データI1及び空中写真画像データI2に対してコース方向に互いに重複する空中写真画像データI3と、空中写真画像データI1及び空中写真画像データI2との互いに重複する領域から互いに共通する対応点を設定することも可能である。
【0048】
上記実施形態では、対応点設定装置1が、サンプル領域設定手段12と、特徴点抽出手段13と、共通特徴点検出手段14と、共通特徴点座標位置算出手段15とにより構成される共通特徴点設定部10を備え、飛行方向に重複する空中写真画像データI1と空中写真画像データI2との対応点となる共通特徴点を設定するとして説明したが、これに限らず、空中写真画像データI1と空中写真画像データI2とのエピポーラ幾何を利用して、共通特徴点(q1;q2)を設定するようにしても良い。
【0049】
実施形態2
上記実施形態1では、対応点設定装置1が、共通特徴点設定部10を備えるとして説明したが、実施形態2では、共通特徴点設定部10を備えていない点で異なる。即ち、図10に示すように、予めコース1,2,3方向に隣接する空中写真画像データI1と空中写真画像データI2とにおいて、空中写真画像データI1と空中写真画像データI2との対応点である共通特徴点(q1;q2)の3次元空間における座標位置が記憶手段2に予め記憶されている場合、対応点設定装置1は、読込手段11と、特徴点投影座標位置算出手段16と、探索領域設定手段17と、誤差ベクトル算出手段18と、最頻誤差ベクトル検出手段19と、対応点設定手段20と、出力手段21とにより構成するようにしても良い。このように、空中写真画像データI1と空中写真画像データI2との対応点である共通特徴点(q1;q2)が設定されている場合、読込手段11により記憶手段2に記憶された空中写真画像データIiと、外部標定要素と、共通特徴点とを読み込み、特徴点投影座標位置算出手段16、探索領域設定手段17、誤差ベクトル算出手段18、最頻誤差ベクトル検出手段19、対応点設定手段20により処理することにより、上記実施形態1と同様に、空中写真画像データI1と空中写真画像データI2と空中写真画像データI3とに共通の対応点q5を設定することができる。
【0050】
以上、本発明を実施の形態を用いて説明したが、本発明の技術的範囲は上記実施の形態に記載の範囲には限定されない。上記実施の形態に、多様な変更又は改良を加えることが可能である。
【符号の説明】
【0051】
1 対応点設定装置、11 読込手段、12 サンプル領域設定手段、
13 特徴点抽出手段、14 共通特徴点検出手段、
15 共通特徴点座標位置算出手段、16 特徴点投影座標位置算出手段、
17 探索領域設定手段、18 誤差ベクトル算出手段、
19 最頻誤差ベクトル検出手段、20 対応点設定手段、21 出力手段、
I 空中写真画像データ、Q;Q1;Q2 特徴点、G1;G2 サンプル領域、
T 探索領域、α 対象エリア、
Verr 誤差ベクトル、Vopt 最頻誤差ベクトル。
【技術分野】
【0001】
本発明は、空中測量において、航空機から地物を撮影した空中写真画像データから互いに対応する対応点を自動的に検出する空中写真画像データの対応点設定方法及び対応点設定装置並びに対応点設定プログラムに関する。
【背景技術】
【0002】
従来、空中三角測量は、空中写真測量のために撮影した写真画像を撮影した位置と姿勢を精密に求める手法であり、図8に示すように、所定の高度で飛行する航空機から目標とする対象エリアの地物を隈なく撮影し、撮影した画像(空中写真画像データI)を画像処理することにより行われる。航空機による撮影は、飛行方向に連続して撮影される空中写真画像データIや、隣接する飛行コース1,2,3において撮影される空中写真画像データIの間で対応する点を計測し、空中写真画像データIに含まれる座標既知点の情報も併せてバンドル調整等のブロック調整方によって撮影した画像と地物の絶対的な位置関係を定めている。例えば、飛行方向に沿って連続して撮影される空中写真画像データは、互いに重複割合が60%以上となるように撮影され、異なる飛行コースにおいて撮影された空中写真画像データ同士は互いに重複割合が30%以上となるように撮影される。図9に示すように、撮影した空中写真画像データには、GPSによって計測された撮影位置とIMUによって計測された地物に対するカメラの姿勢との外部標定要素が紐付けされることが多いが、計測された外部標定要素では最終的に空中写真測量を行うには十分な精度を持たないため、画像の間で対応する点を計測し、空中三角測量を行う必要がある。そして、空中写真画像データの互いに重複する領域に含まれる共通対象物から抽出した特徴点同士が対応する対応点を求め、バンドル調整等のブロック調整法によって外部標定要素の同時調整計測を行うことで上記の計測された外部標定要素をさらに精密に決定する。このように精密に決定された外部標定要素を用いることにより、三角測量の原理に基づいて、互いに重複する空中写真画像データから地物の3次元空間内の位置を決定することが可能となる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−323603号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、飛行方向に沿って撮影したときのように、互いに重複する割合がある程度大きいときには空中写真画像データ同士の対応点を設定し易いが、異なる飛行コース同士で隣接するときの空中写真画像データのように重複する割合が小さいときには対応点の設定に困難さが生じ易い。即ち、空中写真画像データにおいて重複割合が大きいときには航空機の移動距離が小さいため撮影対象となる地物の見え方の変化が小さいが、重複割合が小さいときは航空機の移動距離が大きいため撮影対象となる地物の見え方の変化が大きくなり、同一の対象物であっても撮影によって取得された空中写真画像データでは見え方が大きく異なることで、同一の対象物から特徴点を抽出しても同一の地物であると認識されずに対応点として設定されない場合がある。また、異なる対象物から抽出された特徴点であるにも関わらず、特徴点の配置が似ていることで同一の地物として認識され、対応点として設定されてしまう場合がある。特に、類似する景色が広がる森林や、傾斜が大きい山岳部では、対象となる地物の見え方が直ちに変化してしまうため、自動的に対応点を設定することが困難となっている。
このように、自動的に対応点を設定することができない場合には、オペレータが目視により画像を比較することで、対応点を設定する必要があり、作業に熟練度と時間とが必要であった。
【0005】
本発明は、本発明は上記課題を解決すべく、空中写真画像データ同士の対応点を精度良く自動で設定することを可能にする空中写真画像データの対応点設定方法及び対応点設定装置並びに対応点設定プログラムを提供する。
【課題を解決するための手段】
【0006】
上記課題を解決するための空中写真画像データの対応点設定方法の第1の態様として、撮影位置と撮影姿勢とを含む外部標定要素が紐付けされ、互いに重複する領域において互いに共通する共通特徴点の座標位置が予め設定された第1空中写真画像データ及び第2空中写真画像データと、第1空中写真画像データ及び第2空中写真画像データが重複する割合よりも小さい割合で第1空中写真画像データ及び第2空中写真画像データに対して重複する第3空中写真画像データとから互いに共通する対応点を設定する空中写真画像データの対応点設定方法であって、第1空中写真画像データ及び第2空中写真画像データの共通特徴点の座標位置及び第1空中写真画像データ及び第2空中写真画像データを撮影したときの外部標定要素から三角測量の原理に基づいて共通特徴点の3次元空間における座標位置を算出するステップと、第3空中写真画像データを撮影したときの座標位置と、共通特徴点の3次元空間における座標位置とを結ぶ直線が第3空中写真画像データに交差する共通特徴点の第3空中写真画像データへの投影位置を算出するステップと、投影位置を含む所定の大きさの探索領域を第3空中写真画像データに設定するステップと、探索領域に対して共通特徴点をパターンマッチングし、マッチング率が閾値以上で最も高いマッチング率でマッチングしたときの探索領域における座標位置から投影位置までの位置ずれ量及び位置ずれ方向を算出し、誤差ベクトルとして設定するステップと、誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出するステップと、誤差ベクトルが最頻誤差ベクトルとなる位置の投影位置に最頻誤差ベクトルを加えた位置を共通特徴点に対応する対応点に設定するステップとを含む態様とした。
本態様によれば、予め位置関係が特定された第1空中写真画像データ及び第2空中写真画像データに共通の共通特徴点のカメラ座標上の座標位置と、第1空中写真画像データと第2空中写真画像データとを撮影したときの外部標定要素として記憶される3次元空間における撮影位置及び撮影姿勢の関係から三角測量の原理に基づいて共通特徴点の実際の3次元空間における座標位置を算出することができる。さらに、算出された共通特徴点の3次元空間における座標位置と、第3空中写真画像データを撮影したときの外部標定要素として記憶される3次元空間における撮影位置とを結ぶ直線が第3空中写真画像データと交差する共通特徴点の第3空中写真画像データへの投影位置を算出し、投影位置を含む探索領域を第3空中写真画像データに設定し、投影された共通特徴点により探索領域をパターンマッチングし、マッチング率が閾値以上でマッチングする点の中で最もマッチング率が高い探索領域における位置から投影位置までの位置ずれ量及び位置ずれ方向を算出して誤差ベクトルとして設定し、誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出して投影位置に最頻誤差ベクトルを加えることで、第3空中写真画像データ位置を共通特徴点に対応する対応点を算出することができる。
【0007】
また、上記課題を解決するための空中写真画像データの対応点設定方法の第2の態様として、共通特徴点は、第2空中写真画像データ及び第3空中写真画像データと重複する第1空中写真画像データの領域から所定の大きさの第1サンプル領域を抽出し、第1サンプル領域に対応する第2サンプル領域を第2空中写真画像データから特定するステップと、第1サンプル領域及び第2サンプル領域に表わされた地物の形状のうち特徴のある形状を特徴点抽出フィルタにより第1特徴点及び第2特徴点としてそれぞれ抽出し、抽出された第1特徴点を第2特徴点に対してパターンマッチングして第1特徴点に一致する第2特徴点を検出し、第1特徴点と第2特徴点とを共通特徴点に設定するステップとにより設定される態様とした。
本態様によれば、第2空中写真画像データと重複する第1空中写真画像データの領域から所定の大きさの第1サンプル領域を抽出し、第1サンプル領域に対応する第2サンプル領域を第2空中写真画像データから特定して得られた第1サンプル領域と第2サンプル領域に表わされた地物に対して、所定の特徴点抽出フィルタによって特徴点の位置を抽出し、第1サンプル領域において抽出された点を第1特徴点、第2サンプル領域において抽出された点を第2特徴点として設定し、第1サンプル領域及び第2サンプル領域に共通する共通特徴点を第1特徴点と第2特徴点とから検出することにより、第1空中写真画像データと第2空中写真画像データとの位置関係を特定することができる。
【0008】
上記課題を解決するための空中写真画像データの対応点設定装置の第1の構成として、撮影位置と撮影姿勢とを含む外部標定要素が紐付けされ、互いに重複する領域において互いに共通する共通特徴点の座標位置が予め設定された第1空中写真画像データ及び第2空中写真画像データと、第1空中写真画像データ及び第2空中写真画像データが重複する割合よりも小さい割合で第1空中写真画像データ及び第2空中写真画像データに対して重複する第3空中写真画像データとから互いに共通する対応点を設定する空中写真画像データの対応点設定装置であって、第1空中写真画像データ及び第2空中写真画像データの共通特徴点の座標位置及び第1空中写真画像データ及び第2空中写真画像データを撮影したときの外部標定要素から三角測量の原理に基づいて共通特徴点の3次元空間における座標位置を算出する共通特徴点座標位置算出手段と、第3空中写真画像データを撮影したときの座標位置と、共通特徴点の3次元空間における座標位置とを結ぶ直線が第3空中写真画像データに交差する共通特徴点の第3空中写真画像データへの投影位置を算出する特徴点投影座標位置算出手段と、投影位置を含む所定の大きさの探索領域を第3空中写真画像データに設定する探索領域設定手段と、探索領域に対して共通特徴点をパターンマッチングし、マッチング率が閾値以上で最も高いマッチング率でマッチングしたときの探索領域における座標位置から投影位置までの位置ずれ量及び位置ずれ方向を算出し、誤差ベクトルとして設定する誤差ベクトル算出手段と、誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出する最頻誤差ベクトル検出手段と、誤差ベクトルが最頻誤差ベクトルとなる位置の投影位置に最頻誤差ベクトルを加えた位置を共通特徴点に対応する対応点に設定する対応点設定手段とを備える構成とした。
本構成によれば、上記第1の方法と同様の効果を得ることができる。
【0009】
また、上記課題を解決するための空中写真画像データの対応点設定装置の第2の構成として、共通特徴点は、第2空中写真画像データと重複する第1空中写真画像データの領域から所定の大きさの第1サンプル領域を抽出し、第1サンプル領域に対応する第2サンプル領域を第2空中写真画像データから特定するサンプル領域設定手段と、第1サンプル領域及び第2サンプル領域に表わされた地物の形状のうち特徴のある形状を特徴点抽出フィルタにより第1特徴点及び第2特徴点としてそれぞれ抽出し、抽出された第1特徴点を第2特徴点に対してパターンマッチングして第1特徴点に一致する第2特徴点を検出し、第1特徴点と第2特徴点とを共通特徴点に設定する共通特徴点検出手段とにより設定される構成とした。
本構成によれば、上記第2の方法と同様の効果を得ることができる。
【0010】
上記課題を解決するための空中写真画像データの対応点設定プログラムの態様として、請求項1又は請求項2記載の処理をコンピュータにより実行させる態様とした。
本態様によれば、上記第1の方法又は第2の方法と同様の効果を得ることができる。
【0011】
なお、上記発明の概要は、本発明の必要な全ての特徴を列挙したものではなく、これらの特徴群のサブコンビネーションもまた、発明となり得る。
【図面の簡単な説明】
【0012】
【図1】対応点設定装置の概略構成図である。
【図2】サンプル領域において抽出された特徴点の一例を示す図である。
【図3】空中三角測量の概念図である。
【図4】誤差ベクトルの算出を示す概念図である。
【図5】投影点から延長する誤差ベクトル群を示す図である。
【図6】空中写真画像データとファイル番号を示す図である。
【図7】対応点設定装置に記憶されたプログラムのフローチャートを示す図である。
【図8】空中写真画像データの取得概念図である。
【図9】空中写真における幾何を示す図である。
【図10】対応点設定装置の他の形態の概略構成図である。
【0013】
以下、実施の形態を通じて本発明を詳説するが、以下の実施の形態は特許請求の範囲に係る発明を限定するものではなく、また、実施の形態の中で説明される特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【発明を実施するための形態】
【0014】
実施形態1
図8に示すように、空中写真測量は、測量する対象エリアαを略均等な大きさの複数の領域δαに分け、各領域δαを航空機からカメラにより撮影し、撮影された空中写真を画像処理することで行われる。具体的には、図中の2点鎖線で示すような複数のコース1,2,3からなる飛行経路に沿って、所定の高度を保ちつつ飛行しながら空中から撮影される。コース1,2,3は、各コース1,2,3の延長方向を例えば東西とすれば、コース1,2,3の隣接方向がその垂直方向の南北となるように設定され、かつ、対象エリアαを必要最小限の撮影回数で撮影するように設定される。空中写真は、各コース1,2,3に沿う方向には撮影範囲が互いに約60%以上で重複するように撮影し、コース1,2或いは2,3のように異なるコース1,2,3に隣接する方向には、撮影範囲が約30%以上で重複するように撮影される。本実施形態では、各コース1,2,3の延長方向を例えば東西、コース1,2,3の隣接方向がその垂直方向の南北として設定したが、測量する対象エリアαの形状に応じて、対象エリアαを効率良く撮影できるようにコース及びコースの隣接方向を設定すれば良い。
【0015】
図9は、空中写真の撮影と撮影位置及び撮影姿勢の幾何関係を示す図である。
航空機には、撮影位置Oiと撮影姿勢を計測するGPS/IMU装置と、地物の撮影を行うカメラが搭載される。GPSアンテナは、空中写真測量の規定に基づいて航空機の所定の位置に取り付けられ、飛行時の緯度、経度及び高度をGPS衛星から取得する。また、5個以上のGPS衛星を捕捉可能な時間帯に撮影することで撮影位置Oiを精度良く取得することができる。なお、撮影位置Oiの添字iは、後述の空中写真画像データの番号である。本実施形態では、i=1〜21として説明する(図6参照)。
図9に示すように、GPSによって取得される撮影位置Oiの座標位置(Xi,Yi,Zi)は、地上座標系で表わされる。地上座標系は、例えば東西方向(緯線方向)をX軸、南北方向(経線方向)をY軸、地表からの高さ方向をZ軸としてデカルト座標系で表わされる。具体的には、地心座標系(地心を中心とする3次元座標系)もしくはガウス・クリューガー図法の平面座標に標高をZ方向に加えた3次元座標系を利用することが多い。
【0016】
IMUは、空中撮影に用いるカメラに装着され、航空機の飛行姿勢によって変化する撮影姿勢を計測する。具体的には、IMUは、ジャイロ及び加速度センサを備え、航空機の飛行姿勢、例えば飛行姿勢のローリングを示すω(X軸周りの回転角)、ピッチングを示すφ(Y軸周りの回転角)、ヨーイングを示すκ(Z軸周りの回転角)を計測する。つまり、IMUによって飛行姿勢を計測しておくことで、飛行姿勢が撮影に及ぼす影響を記録する。
【0017】
GPSによって計測される撮影位置Oiにおける座標位置(Xi,Yi,Zi)及びIMUによって各座標軸周りの回転角κi,φi,ωiは、撮影位置及び撮影姿勢を特定するための外部標定要素である。なお、撮影位置の座標位置(Xi,Yi,Zi)は、地上座標系である。
【0018】
カメラは、航空機の所定の位置に取り付けられる。カメラによる撮影は、光軸が地表に対して、略鉛直方向となるように行われる。例えば、カメラには地物の写真をデジタル化して取得するデジタルエリアカメラが適用される。
カメラによって撮影された空中写真は、撮影毎の外部標定要素及び焦点距離ciとともに空中写真画像データIiとしてハードディスクやメモリー等の記憶媒体2に保存される。なお、焦点距離ciは、同一のカメラで固定焦点で撮影した場合には、同一の焦点距離と見なすことができる。
撮影毎の位置及び撮影姿勢に対応する外部標定要素及び焦点距離ciは、記憶媒体2に紐付けされて記憶される。
【0019】
なお、カメラは、デジタルエリアカメラに限らず、デジタルビデオカメラ、アナログビデオカメラ、フィルムカメラ等、地物を写真として撮影可能なものであればいずれであっても良い。写真撮影後から写真の画像処理までの手間を考慮すれば、撮影した写真を画像データとして直接コンピュータに入力することができるデジタルエリアカメラ、デジタルビデオカメラ等のデジタル光学カメラを用いると良い。また光学的なひずみ(レンズディストーション)の小さいものが好ましい。以下の説明では、基本的にレンズディストーションの影響が少ない、もしくは、そのような影響が補正された画像データを利用するものとする。
【0020】
図1は、対応点設定装置1の概略構成図を示す。
記憶媒体2に保存された空中写真画像データIiは、対応点設定装置1によって空中写真画像データIi同士の対応関係が設定される。
対応点設定装置1は、地物を空中から撮影した空中写真画像データIiの重複する部分において、互いに一致する対応点を設定するための処理を実行するコンピュータであり、演算処理手段としてのCPU、記憶手段としてのROM,RAM及びHDD、通信手段としてのインターフェイスを含み、記憶手段に格納されたプログラムに従って対応点の設定処理を実行する。また、対応点設定装置1には、キーボード4やマウス等の入力手段や、モニタ6等の表示手段が接続される。
【0021】
対応点設定装置1は、読込手段11と、共通特徴点設定部10と、特徴点投影座標位置算出手段16と、探索領域設定手段17と、誤差ベクトル算出手段18と、最頻誤差ベクトル検出手段19と、対応点設定手段20と、出力手段21とを備える。
読込手段11は、記憶媒体2から空中写真画像データIi、外部標定要素(Xi,Yi,Zi,κi,φi,ωi)及び焦点距離ciの読込を行う。
【0022】
図2(a),(b)は、特徴点抽出手段13により飛行コース1に沿って互いに連続する空中写真画像データIiから抽出された第1サンプル領域G1と、空中写真画像データIi+1から第1サンプル領域G1に対応する第2サンプル領域G2とから抽出された第1及び第2特徴点Q1,Q2の一例を示す図である。以下、各飛行コースにおいて先に撮影された空中写真画像データをI1、次に撮影された空中写真画像データをI2として説明する。また、空中写真画像データI1及び空中写真画像データI2に重複する空中写真画像データをI3として説明する。
共通特徴点設定部10は、サンプル領域設定手段12と、特徴点抽出手段13と、共通特徴点検出手段14と、共通特徴点座標位置算出手段15とにより構成される。
サンプル領域設定手段12は、空中写真画像データI2と空中写真画像データI3とに重複する空中写真画像データI1の領域から所定の大きさの第1サンプル領域G1を抽出し、第1サンプル領域G1に対応する第2サンプル領域G2を第2空中写真画像データから特定する。第1サンプル領域G1を抽出する位置は、空中写真画像データI1と空中写真画像データI2との重複する割合が分かっていることから、空中写真画像データI1において空中写真画像データI2が重複する側から抽出するように設定すれば良い。例えば、空中写真画像データI1の画素座標系を考え、既知の空中写真画像データI1と空中写真画像データI2との重複する割合に基づいて重複する画素座標の範囲を空中写真画像データI1に設定する。次に、既知の空中写真画像データI1と空中写真画像データI3との重複する割合に基づいて重複する画素座標の範囲を空中写真画像データI1に設定する。そして、この範囲内から第1サンプル領域G1を設定することで、第1サンプル領域G1を空中写真画像データI1と空中写真画像データI2と空中写真画像データI3が重複する範囲から設定することができる。
なお、空中写真画像データI1と空中写真画像データI2と空中写真画像データI3とが重複する範囲から第1サンプル領域G1を設定する方法は、上記に限定されず、結果として空中写真画像データI1と空中写真画像データI2と空中写真画像データI3とが重複する範囲から第1サンプル領域G1が設定されるようにすれば良い。
また、第2サンプル領域G2の抽出には、第1サンプル領域G1に対応する位置を第2空中写真画像データI2内からパターンマッチング等の手法により抽出すれば良い。
第1サンプル領域G1の大きさは、例えば、空中写真画像データI1の大きさを10000画素×10000画素とした場合、全体の1/1000〜1/10000程度に分割される。空中写真画像データI1を画素数において、辺々を200分割した場合には、元の空中写真画像データIの1/4000の大きさとなり、第1サンプル領域G1の大きさは50画素×50画素に設定される。
【0023】
特徴点抽出手段13は、図2(a),(b)において丸印で示すように、画像に表わされる地物から特徴点Qiを抽出する特徴点抽出フィルタを備え、空中写真画像データI1の第1サンプル領域G1及び空中写真画像データI2の第2サンプル領域G2に表わされる地物、例えば建物の角、道路の白線の角、地形の角のように周囲に対して明瞭な特徴となる第1及び第2特徴点Q1,Q2として抽出する。具体的な特徴点抽出フィルタには、例えば、Foerstnerフィルタ、SUSANフィルタ、FASTフィルタ等が適用される。
【0024】
共通特徴点検出手段14は、第1サンプル領域G1と第2サンプル領域G2から共通する共通特徴点(q1;q2)を検出する。共通特徴点検出手段14は、空中写真画像データI1の第1サンプル領域G1に含まれる複数の第1特徴点Q1と第2サンプル領域G2に含まれる第2特徴点Q2とをパターンマッチングすることにより共通の特徴点である共通特徴点(q1;q2)を検出する。なお、パターンマッチングでは、第1サンプル領域G1を回転角(κ1,φ1,ω1)により補正し、第2サンプル領域G2を回転角(κ2,φ2,ω2)により補正した状態で第1特徴点Q1と第2特徴点Q2とに共通の共通特徴点(q1;q2)を検出する。つまり、第1サンプル領域G1と第2サンプル領域G2から検出された共通特徴点(q1;q2)は、空中写真画像データI1と空中写真画像データI2との対応点である。
【0025】
図3は、3次元空間における空中写真画像データI1と空中写真画像データI2及び空中写真画像データI3の関係を示す図である。
共通特徴点座標位置算出手段15は、共通特徴点検出手段14により検出された共通特徴点(q1;q2)の実際の地物、点Qの地上座標系における座標位置(xQ,yQ,zQ)を算出する。共通特徴点(q1;q2)の位置は、空中写真画像データI1の写真座標及び空中写真画像データI2の写真座標からそれぞれ既知であるので、焦点距離c1及びc2を用いて写真座標系からカメラ座標系に変換し、外部標定要素の(X1,Y1,Z1,κ1,φ1,ω1)及び(X2,Y2,Z2,κ2,φ2,ω2)を用いてカメラ座標系から地上座標系に変換することで、地上座標上の座標位置(xQ,yQ,zQ)が算出される。
【0026】
以下、共通特徴点座標位置算出手段15により共通特徴点(q1;q2)の地上座標系における座標位置(xQ,yQ,zQ)を算出する方法について具体的に説明する。特徴点q1と特徴点q2とは、地物の同一の点Qが撮影されたものであるので、特徴点q1及び特徴点q2から点Qの座標位置(xQ,yQ,zQ)は以下のように算出される。
空中写真画像データI1において特徴点q1の写真座標系における座標位置は(x1,y1)、空中写真画像データI2において特徴点q2の写真座標系における座標位置は(x2,y2)と表わされる。特徴点q1の座標位置(x1,y1)及び特徴点q2の座標位置(x2,y2)は、実際には、カメラの撮影中心から焦点距離c1,c2だけ離間した撮影面に投影されたものであるから、撮影位置O1,O2の座標位置を撮影中心とし、撮影中心O1,O2をそれぞれのカメラ座標系の原点とすれば、カメラ座標において、特徴点q1は座標位置(x1,y1,−c1)、特徴点q2は座標位置(x2,y2,−c2)と表わされる。なお、撮影位置O1,O2の地上座標系おける座標位置は、撮影時の外部標定要素によって与えられ、具体的には、撮影位置O1は座標位置(X1,Y1,Z1)、撮影位置O2は座標位置(X2,Y2,Z2)である。
【0027】
よって、Q(xQ,yQ,zQ)は、空中写真画像データI1の撮影中心O1と、空中写真画像データI2の撮影中心O2と特徴点q1,q2との関係から、前方交差法等の三角測量の原理から求めることができる。例えば以下の式(1)によりQ(xQ,yQ,zQ)を求めることができる。
u1・(Q−O1)・u1−Q=−(u2・(Q−O2)・u2−Q) …式(1)
u1=R1−1・q1/|q1| …式(2)
u2=R2−1・q2/|q2| …式(3)
ここで、式(2)に示すu1は撮影位置O1から特徴点q1に向かう単位ベクトルを地上座標系で表わしたものであり、式(3)に示すu2は撮影位置O2から特徴点q2に向かう単位ベクトルを地上座標系で表わしたものである。また、R1,R2は、撮影姿勢を表わす回転角(κ1,φ1,ω1)、(κ2,φ2,ω2)によって設定されるカメラ座標系から地上座標系へ座標系を変換する変換行列(回転行列)であり、R1−1及びR2−1は、地上座標系からカメラ座標系へ座標変換する変換行列で、R1及びR2の逆行列である。
【0028】
特徴点投影座標位置算出手段16は、共通特徴点(q1;q2)が空中写真画像データI3に投影されたときの投影点q3の写真座標系での座標位置(x3,y3)を算出する。具体的には、共通特徴点座標位置算出手段15により算出された点Qの座標位置(xQ,yQ,zQ)と、撮影中心O3の座標位置(X3,Y3,Z3)と、投影点q3の座標位置との共線条件に基づいて算出される。
共通特徴点(q1;q2)が投影された空中写真画像データI3における投影点q3は、カメラ座標系で座標位置(x3,y3,z3)とすると、(x3,y3,z3)=R3・(Q−O3)の関係から算出される。R3は、撮影中心O3における撮影姿勢を表わす外部標定要素の回転角(κ3,φ3,ω3)によって設定されるカメラ座標系から地上座標系へ空中写真画像データI3上の点を座標変換する変換行列(回転行列)である。つまり、撮影中心O3をカメラ座標系の原点として投影点q3の座標位置(x3,y3,z3)を位置ベクトルと見なせば、位置ベクトル(x3,y3,z3)を実数倍したZ方向の座標位置が焦点距離c3と一致するときがカメラ座標における投影点q3の座標位置であるから、投影点q3のカメラ座標上の座標位置(x3,y3,−c3)におけるx3,y3は、
x3=−c3・(x3/z3)
y3=−c3・(y3/z3)
により求めることができる。つまり、撮影中心O3と投影点q3とを結ぶ線分の空中写真画像データI3への射影によって投影点q3の写真座標系での座標位置(x3,y3)が算出される。従って、カメラ座標系における投影点q3の座標位置(x3,y3,−c3)が算出される。
【0029】
このように、算出された投影点q3の座標位置(x3,y3,−c3)は、投影点q3と、撮影中心O3と、点Qの座標位置(xQ,yQ,zQ)との共線条件から数学的に算出されたものであるが、計測された外部標定要素、即ち、空中写真画像データI3を撮影したときの撮影中心O3の座標位置(X3,Y3,Z3)及び撮影姿勢を示す回転角(κ3,φ3,ω3)が誤差を含んでいるため、空中写真画像データI3において共通特徴点(q1;q2)に対応する対応点としての正しい位置に対して誤差が生じている。外部標定要素の計測精度が十分高い場合においても、特徴点投影座標位置算出手段16によって算出された空中写真画像データI3の投影点q3の写真座標系における座標位置(x3,y3)は、共通特徴点(q1;q2)が正しく対応する位置に比べて微小のズレが生じる。この微小のズレは、全ての共通特徴点(q1;q2)が投影された投影点q3において、正しいと思われる位置から同一方向に変位した平行移動として表れることが分かっている。
【0030】
探索領域設定手段17では、図4(a),(b)に示すように、特徴点投影座標位置算出手段16により空中写真画像データI3に投影された投影点q3周りに所定の大きさの探索領域Tを設定する。探索領域Tは、投影点q3が中心に位置するように、所定の大きさの例えば矩形領域で設定される。探索領域Tの大きさは、外部標定要素の計測精度を超えない範囲の大きさ、言い換えると、写真座標系における投影点q3の座標位置(x3,y3)と、投影点q3が空中写真画像データI3において共通特徴点(q1;q2)に正しく対応する位置との微小のズレよりも大きく設定される。
なお、空中写真画像データI1,I2,I3の撮影時に取得される外部標定要素の測定精度が高ければ、探索領域Tの大きさを小さく、測定精度に不安のある場合にはやや探索領域を大きめに設定すると良い。
【0031】
誤差ベクトル算出手段18は、投影点q3を含む探索領域Tに対して、投影された共通特徴点(q1;q2)の特徴点q1又は特徴点q2のパターンによりパターンマッチングし、マッチング率が予め設定された閾値以上でマッチングする点の中でマッチング率が最大となる位置を探索領域Tから探索する。なお、パターンマッチングでは、特徴点q1又は特徴点q2のパターンを外部標定要素の回転角(κ1,φ1,ω1)又は回転角(κ2,φ2,ω2)によりそれぞれ補正し、探索領域Tを回転角(κ3,φ3,ω3)により補正したもの同士について行う。そして、マッチング率が最大となる位置と、投影点q3の位置との距離及び方向を算出する。マッチング率には、パターンマッチングで良く一致すればするほど高い値を出力するときの位置を使用する。例えば空中写真画像データI1において特徴点q1を囲む画素と、探索領域T内のある画素を囲む画素間の相関係数を算出すれば良い。そして、マッチング率が閾値以上の値で最大となったときの位置を補正点q4の座標位置(x4,y4)とし、補正点q4の座標位置(x4,y4)と投影点q3の座標位置(x3,y3)との位置ずれ量及び位置ずれ方向を算出する。つまり、誤差ベクトル算出手段18は、投影された投影点q3の座標位置(x3,y3)から最も正しいと思われる補正点q4の座標位置(x4,y4)への誤差ベクトルVerr=(x4−x3,y4−y3)を算出する。誤差ベクトルは投影点q3が始点で補正点q4が終点である。そして、空中写真画像データI1及びI2において共通する全ての共通特徴点(q1;q2)に対して誤差ベクトルVerrを算出することにより、図5に示すように、複数の誤差ベクトルVerr群を算出する。
【0032】
最頻誤差ベクトル検出手段19は、誤差ベクトル算出手段18により算出された誤差ベクトルVerr群のうち、探索領域T内において最も多く頻出する誤差ベクトルVerrを最頻誤差ベクトルVoptとして探索する。外部標定要素の誤差が小さいとき、画像内の局所領域においては、この誤差は、一定方向に一定量になることが数学的に導くことができる。即ち、正しくマッチングしているところは同じ誤差ベクトルを有していると予測することができる。よって最頻誤差ベクトルVoptとなっているところは、正しくマッチングしていると判断できる。
【0033】
対応点設定手段20は、最頻誤差ベクトルVoptと同じ誤差ベクトルとなる投影点q3に最頻誤差ベクトルVoptを加えた位置、即ち補正点q4の位置を共通特徴点(q1;q2)に対応する対応点q5の座標位置(x5,y5)として算出する。つまり、算出された対応点q5は、空中写真画像データI1,I2,I3に共通の対応点として設定される。
【0034】
出力手段21は、対応点設定手段20によって算出された対応点q5の座標位置(x5,y5)と、これに対応する第1特徴点Q1の座標位置(x1,y1)と、第2特徴点Q2の座標位置(x2,y2)とを紐付けし、記憶媒体としての対応点データベース7に出力する。
【0035】
従って、空中写真画像データI1及びI2に共通特徴点(q1;q2)である対応点を空中写真画像データI3に投影し、上記誤差ベクトルVerrを用いて、統計的に正しいと思われる最頻誤差ベクトルVoptを投影点q3に加えて補正を行うことで簡単に空中写真画像データI1,I2に対応する対応点q5の座標位置(x5,y5)を自動で設定することができる。また、空中写真画像データI1,I2から抽出された複数の共通特徴点(q1;q2)毎に投影された投影点q3群によって誤差ベクトルVerr群を算出し、誤差ベクトルVerr群のうち最頻の最頻誤差ベクトルVoptを検出すること、言い換えると、誤差ベクトルVerr群のうち統計的に最も多い最頻誤差ベクトルVoptを検出し、当該最頻誤差ベクトルVoptにより空中写真画像データI1に対する空中写真画像データI3の投影点q3のズレを補正するので、空中写真画像データI1と空中写真画像データI3との重複が少なくても、空中写真画像データI1,I3の互いに対応する対応点を確実に特定することができる。
【0036】
以下、対応点設定装置1による対応点の設定方法の一実施形態についてフローチャートを用いて説明する。
撮影された空中写真画像データIi(i=1〜21)は、コース番号m(m=1〜3)と、各コース1,2,3において撮影した撮影番号n(n=1〜7)の2つの番号がファイル番号として付され、空中写真画像データファイルm_nとして記憶媒体2に記憶されている。具体的には、図6に示すように、例えば、コース1の場合にはファイル1_1,1_2,・・・、コース2の場合にはファイル2_1,2_2,・・・、コース3の場合にはファイル3_1,3_2,・・・等のように付されている。
【0037】
対応点設定装置1を起動すると、記憶手段に記憶されたプログラムによって画面が表示される。画面には、処理を行う空中写真画像データファイルm_nの読み込みボタンや、処理変数の設定ボタン等が配置され、マウスやキーボードにより入力設定される。入力設定が完了すると、画面には、対応点の設定を開始するファイル名と、これに対応する焦点距離と外部標定要素とが数値として表示される。そして、対応点の設定開始を指示すると、まず、読込手段11により全ての空中写真画像データファイルm_nに記憶される空中写真画像データIiの読込が行われる(ステップ101)。
【0038】
以下の処理は、ファイル番号m_nによって管理されるものとして説明する。
まず、処理を行うファイルのコース番号mと、撮影番号nとをリセットする(ステップ102)。次に、コース番号mを1に設定し(ステップ103)、次に、撮影番号nを1に設定する(ステップ104)。次に、設定されたコース番号m及び撮影番号nにより、処理するファイルの設定を行う。例えば、飛行方向に隣接するファイルm_n,ファイルm_n+1、異なる飛行コースにおいてファイルm_n及びファイルm_n+1に重複するファイルm+1_n、及びファイルm_n及びファイルm_n+1に重複するファイルm+1_n+1とが設定される(ステップ105)。具体的には、m=1,n=1から開始され、ファイル1_1に対応する空中写真画像データI1と、ファイル1_2に対応する空中写真画像データI2とファイル2_1に対応する空中写真画像データI14との対応点の設定、及びファイル1_1に対応する空中写真画像データI1とファイル1_2に対応する空中写真画像データI2とファイル2_2に対応する空中写真画像データI13との対応点の設定から行われる(図6参照)。即ち、本実施形態では、空中写真画像データI1とI2とI14とが重複する領域と、空中写真画像データI1とI2とI13とが重複する領域とは、略同一と見なすことができるので、空中写真画像データI14とI13とに共通に重複する空中写真画像データI1とI2とで設定された共通特徴点(q1;q2)を用いて空中写真画像データI14とI13との対応点をそれぞれ算出するようにした。
【0039】
次に、サンプル領域設定手段12により空中写真画像データI1の空中写真画像データI2、空中写真画像データI14及び空中写真画像データI13と重複する領域から所定の大きさの第1サンプル領域G1を抽出し、空中写真画像データI2に対して第1サンプル領域G1でパターンマッチングを行い空中写真画像データI2から第1サンプル領域G1に対応する第2サンプル領域G2を特定することで、空中写真画像データI1と、空中写真画像データI2とに互いに対応するサンプル領域を設定する(ステップ106)。
【0040】
次に、特徴点抽出手段13の特徴点抽出フィルタにより、空中写真画像データI1に表される地物から複数の第1特徴点Q1、空中写真画像データI2に表される地物から複数の第2特徴点Q2を抽出する。抽出された複数の第1特徴点Q1及び第2特徴点Q2は、空中写真画像データI1及び空中写真画像データI2の各写真座標における座標位置(x1,y1)及び座標位置(x2,y2)として記憶される(ステップ107)。
【0041】
次に、共通特徴点検出手段14により、複数の第1特徴点Q1を複数の第2特徴点Q2に対してパターンマッチングを行い、共通特徴点(q1;q2)の検出を行う。言い換えれば、共通特徴点検出手段14では、空中写真画像データI1及び空中写真画像データI2に表れる共通の点Qの検出を行う(ステップ108)。
【0042】
次に、共通特徴点座標位置算出手段15により、共通特徴点(q1;q2)の地上座標系における点Qの座標位置(xQ,yQ,zQ)を算出する(ステップ109)。具体的には、共通特徴点(q1;q2)の一つである第1特徴点Q1を含む空中写真画像データI1の撮影時の焦点距離c1を用いて、写真座標系の座標位置(x1,y1)から撮影位置O1を原点とするカメラ座標系の座標位置(x1,y1,−c1)に変換し、外部標定要素の回転角(κ1,φ1,ω1)から得られる変換行列R1によりカメラ座標系を地上座標系の座標位置(x1g,y1g,−c1g)に変換する。また、共通特徴点(q1;q2)のもう一つの第2特徴点Q2を含む空中写真画像データI2の撮影時の内部標定要素である焦点距離c2を用いて、写真座標系の座標位置(x2,y2)から撮影位置O2を原点とするカメラ座標系の座標位置(x2,y2,−c2)に変換し、外部標定要素の回転角(κ2,φ2,ω2)から得られる変換行列R2によりカメラ座標系を地上座標系の座標位置(x2g,y2g,−c2g)に変換する。
【0043】
そして、地上座標系の座標位置として外部標定要素として測定された撮影位置O1(X1,Y1,Z1)と第1特徴点Q1の座標位置(x1g,y1g,−c1g)と点Qの座標位置(xQ,yQ,ZQ)との共線条件、地上座標系の座標位置として外部標定要素として測定された撮影位置O2の座標位置(X2,Y2,Z2)と第2特徴点Q2の座標位置(x2g,y2g,−c2g)と点Qの座標位置(xQ,yQ,ZQ)から三角測量の原理で地上座標系における点Qの座標位置(xQ,yQ,zQ)を算出する。
【0044】
次に、空中写真画像データI1及び空中写真画像データI2に重複する空中写真画像データI14又は空中写真画像データI13を呼び出すために、画像番号nを制御変数kに置き換える。(ステップ110)。
次に、ステップ110により制御変数kにより空中写真画像データI14の呼び出しを行い、特徴点投影座標算出手段16により、共通特徴点(q1;q2)が空中写真画像データI14に投影されたときの写真座標系での投影点q3の投影座標位置を算出する(ステップ111)。具体的には、地上座標系における空中写真画像データI14を撮影したときの撮影位置O14と共通特徴点(q1;q2)により算出された点Qの座標位置(xQ,yQ,zQ)とを結ぶ直線が空中写真画像データI14と交差するときの交点である投影点q3の写真座標系における座標位置(x3,y3)を算出する。
【0045】
次に、探索領域設定手段17により、投影点q3周りに所定の大きさの探索領域Tを設定する(ステップ112)。
次に、誤差ベクトル算出手段18により、投影点q3を含む探索領域Tに対して、投影された特徴点Q1(Q2)自身をテンプレートFとしてパターンマッチングし(ステップ113)、マッチング率が閾値以上で最も高いマッチング率でマッチングしたときの座標位置を補正点q4として探索領域Tから検出する(ステップ114)。そして、補正点q4の位置と、投影点q3の位置との位置ずれ量及び位置ずれ方向を算出し、誤差ベクトルVerrとして出力する(ステップ115)。
【0046】
次に、最頻誤差ベクトル検出手段19により、誤差ベクトルVerrのうち探索領域T内において最も多く頻出する誤差ベクトルVerrを最頻誤差ベクトルVoptとして検出する(ステップ116)。
次に、対応点設定手段20により、誤差ベクトルVerrが最頻誤差ベクトルVoptとなる投影点q3に最頻誤差ベクトルVoptを加えた位置を共通特徴点(q1;q2)に対応する対応点q5の座標位置(x5,y5)として算出する(ステップ117)。つまり、対応点q5は、空中写真画像データI1,I2,I14に共通のものとして設定される。
次に、空中写真画像データを呼び出す制御変数kが撮影番号n+1と等しいかどうかの判定を行い、制御変数kの値が撮影番号n+1と異なる場合にはステップ119に移行し、制御変数kの値が、撮影番号n+1と等しい場合にはステップ120に移行する(ステップ118)。
制御変数kの値が撮影番号n+1と異なる場合にはステップ119に移行して、制御変数kの値を更新し、制御変数k+1に置き換え(ステップ119)、ステップ111に戻り、ファイル2_2の空中写真画像データI13の処理をステップ111〜ステップ117までを繰り返し行い、空中写真画像データI1,I2,I13に共通の対応点を設定する。
次に、ステップ118により、撮影番号n+1と等しいと判定された場合には、ステップ120により制御変数kを0(ゼロ)にリセットする(ステップ120)。
次に、撮影番号nが6よりも小さいかどうかの判定を行い、撮影番号nが6よりも小さい場合には、ステップ104に戻り、撮影番号nをn+1に更新し、ステップ105〜ステップ120を行い、撮影番号nが6になるまでステップ104〜ステップ120までを繰り返し行う。また、撮影番号nが6となった場合には、ステップ122に移行する(ステップ121)。
次に、コース番号が3よりも小さいかどうかの判定を行い、コース番号が3よりも小さい場合には、ステップ103に戻り、撮影番号mをm+1に更新し、ステップ104〜ステップ121を行い、コース番号mが3になるまでステップ103〜ステップ121までを繰り返し行う。また、コース番号mが3となった場合には、互いに重複する全ての空中写真画像データI同士において設定された対応点を出力手段21を介して対応点データベース7に出力して終了する(ステップ122)。
【0047】
なお、空中写真画像データは、デジタルエリアカメラによって記録された地物の画像に限らず、アナログカメラによって撮影されたフィルムからフィルムスキャナによってデジタル化されたものであっても良い。
また、上記実施形態では、図6に示すように、コース方向に互いに重複する空中写真画像データI1及び空中写真画像データI2と、コース並び方向において空中写真画像データI1及び空中写真画像データI2が重複する割合よりも小さい割合で空中写真画像データI1及び空中写真画像データI2に対して重複する空中写真画像データI14又は空中写真画像データI13とに共通する対応点を設定するとして説明したが、上記方法によれば、空中写真画像データI1及び空中写真画像データI2に対してコース方向に互いに重複する空中写真画像データI3と、空中写真画像データI1及び空中写真画像データI2との互いに重複する領域から互いに共通する対応点を設定することも可能である。
【0048】
上記実施形態では、対応点設定装置1が、サンプル領域設定手段12と、特徴点抽出手段13と、共通特徴点検出手段14と、共通特徴点座標位置算出手段15とにより構成される共通特徴点設定部10を備え、飛行方向に重複する空中写真画像データI1と空中写真画像データI2との対応点となる共通特徴点を設定するとして説明したが、これに限らず、空中写真画像データI1と空中写真画像データI2とのエピポーラ幾何を利用して、共通特徴点(q1;q2)を設定するようにしても良い。
【0049】
実施形態2
上記実施形態1では、対応点設定装置1が、共通特徴点設定部10を備えるとして説明したが、実施形態2では、共通特徴点設定部10を備えていない点で異なる。即ち、図10に示すように、予めコース1,2,3方向に隣接する空中写真画像データI1と空中写真画像データI2とにおいて、空中写真画像データI1と空中写真画像データI2との対応点である共通特徴点(q1;q2)の3次元空間における座標位置が記憶手段2に予め記憶されている場合、対応点設定装置1は、読込手段11と、特徴点投影座標位置算出手段16と、探索領域設定手段17と、誤差ベクトル算出手段18と、最頻誤差ベクトル検出手段19と、対応点設定手段20と、出力手段21とにより構成するようにしても良い。このように、空中写真画像データI1と空中写真画像データI2との対応点である共通特徴点(q1;q2)が設定されている場合、読込手段11により記憶手段2に記憶された空中写真画像データIiと、外部標定要素と、共通特徴点とを読み込み、特徴点投影座標位置算出手段16、探索領域設定手段17、誤差ベクトル算出手段18、最頻誤差ベクトル検出手段19、対応点設定手段20により処理することにより、上記実施形態1と同様に、空中写真画像データI1と空中写真画像データI2と空中写真画像データI3とに共通の対応点q5を設定することができる。
【0050】
以上、本発明を実施の形態を用いて説明したが、本発明の技術的範囲は上記実施の形態に記載の範囲には限定されない。上記実施の形態に、多様な変更又は改良を加えることが可能である。
【符号の説明】
【0051】
1 対応点設定装置、11 読込手段、12 サンプル領域設定手段、
13 特徴点抽出手段、14 共通特徴点検出手段、
15 共通特徴点座標位置算出手段、16 特徴点投影座標位置算出手段、
17 探索領域設定手段、18 誤差ベクトル算出手段、
19 最頻誤差ベクトル検出手段、20 対応点設定手段、21 出力手段、
I 空中写真画像データ、Q;Q1;Q2 特徴点、G1;G2 サンプル領域、
T 探索領域、α 対象エリア、
Verr 誤差ベクトル、Vopt 最頻誤差ベクトル。
【特許請求の範囲】
【請求項1】
撮影位置と撮影姿勢とを含む外部標定要素が紐付けされ、互いに重複する領域において互いに共通する共通特徴点の座標位置が予め設定された第1空中写真画像データ及び第2空中写真画像データと、前記第1空中写真画像データ及び第2空中写真画像データが重複する割合よりも小さい割合で前記第1空中写真画像データ及び前記第2空中写真画像データに対して重複する第3空中写真画像データとから互いに共通する対応点を設定する空中写真画像データの対応点設定方法であって、
前記第1空中写真画像データ及び前記第2空中写真画像データの前記共通特徴点の座標位置及び前記第1空中写真画像データ及び前記第2空中写真画像データを撮影したときの前記外部標定要素から三角測量の原理に基づいて前記共通特徴点の3次元空間における座標位置を算出するステップと、
前記第3空中写真画像データを撮影したときの座標位置と、前記共通特徴点の3次元空間における座標位置とを結ぶ直線が前記第3空中写真画像データに交差する前記共通特徴点の前記第3空中写真画像データへの投影位置を算出するステップと、
前記投影位置を含む所定の大きさの探索領域を前記第3空中写真画像データに設定するステップと、
前記探索領域に対して前記共通特徴点をパターンマッチングし、マッチング率が閾値以上で最も高いマッチング率でマッチングしたときの前記探索領域における座標位置から前記投影位置までの位置ずれ量及び位置ずれ方向を算出し、誤差ベクトルとして設定するステップと、
前記誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出するステップと、
前記誤差ベクトルが最頻誤差ベクトルとなる位置の前記投影位置に最頻誤差ベクトルを加えた位置を前記共通特徴点に対応する対応点に設定するステップとを含む空中写真画像データの対応点設定方法。
【請求項2】
前記共通特徴点は、前記第2空中写真画像データと重複する前記第1空中写真画像データの領域から所定の大きさの第1サンプル領域を抽出し、前記第1サンプル領域に対応する第2サンプル領域を前記第2空中写真画像データから特定するステップと、
前記第1サンプル領域及び前記第2サンプル領域に表わされた地物の形状のうち特徴のある形状を特徴点抽出フィルタにより第1特徴点及び第2特徴点としてそれぞれ抽出し、抽出された第1特徴点を第2特徴点に対してパターンマッチングして第1特徴点に一致する第2特徴点を検出し、前記第1特徴点と前記第2特徴点とを共通特徴点に設定するステップとにより設定される請求項1記載の空中写真画像データの対応点設定方法。
【請求項3】
撮影位置と撮影姿勢とを含む外部標定要素が紐付けされ、互いに重複する領域において互いに共通する共通特徴点の座標位置が予め設定された第1空中写真画像データ及び第2空中写真画像データと、前記第1空中写真画像データ及び第2空中写真画像データが重複する割合よりも小さい割合で前記第1空中写真画像データ及び前記第2空中写真画像データに対して重複する第3空中写真画像データとから互いに共通する対応点を設定する空中写真画像データの対応点設定装置であって、
前記第1空中写真画像データ及び前記第2空中写真画像データの前記共通特徴点の座標位置及び前記第1空中写真画像データ及び前記第2空中写真画像データを撮影したときの前記外部標定要素から三角測量の原理に基づいて前記共通特徴点の3次元空間における座標位置を算出する共通特徴点座標位置算出手段と、
前記第3空中写真画像データを撮影したときの座標位置と、前記共通特徴点の3次元空間における座標位置とを結ぶ直線が前記第3空中写真画像データに交差する前記共通特徴点の前記第3空中写真画像データへの投影位置を算出する特徴点投影座標位置算出手段と、
前記投影位置を含む所定の大きさの探索領域を前記第3空中写真画像データに設定する探索領域設定手段と、
前記探索領域に対して前記共通特徴点をパターンマッチングし、マッチング率が閾値以上で最も高いマッチング率でマッチングしたときの前記探索領域における座標位置から前記投影位置までの位置ずれ量及び位置ずれ方向を算出し、誤差ベクトルとして設定する誤差ベクトル算出手段と、
前記誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出する最頻誤差ベクトル検出手段と、
誤差ベクトルが最頻誤差ベクトルとなる位置の前記投影位置に最頻誤差ベクトルを加えた位置を前記共通特徴点に対応する対応点に設定する対応点設定手段とを備える空中写真画像データの対応点設定装置。
【請求項4】
前記共通特徴点は、前記第2空中写真画像データと重複する前記第1空中写真画像データの領域から所定の大きさの第1サンプル領域を抽出し、前記第1サンプル領域に対応する第2サンプル領域を前記第2空中写真画像データから特定するサンプル領域設定手段と、
前記第1サンプル領域及び前記第2サンプル領域に表わされた地物の形状のうち特徴のある形状を特徴点抽出フィルタにより第1特徴点及び第2特徴点としてそれぞれ抽出し、抽出された第1特徴点を第2特徴点に対してパターンマッチングして第1特徴点に一致する第2特徴点を検出し、前記第1特徴点と前記第2特徴点とを共通特徴点に設定する共通特徴点検出手段とにより設定される請求項3記載の空中写真画像データの対応点設定装置。
【請求項5】
前記請求項1又は請求項2記載の処理をコンピュータにより実行させる空中写真画像データの対応点設定プログラム。
【請求項1】
撮影位置と撮影姿勢とを含む外部標定要素が紐付けされ、互いに重複する領域において互いに共通する共通特徴点の座標位置が予め設定された第1空中写真画像データ及び第2空中写真画像データと、前記第1空中写真画像データ及び第2空中写真画像データが重複する割合よりも小さい割合で前記第1空中写真画像データ及び前記第2空中写真画像データに対して重複する第3空中写真画像データとから互いに共通する対応点を設定する空中写真画像データの対応点設定方法であって、
前記第1空中写真画像データ及び前記第2空中写真画像データの前記共通特徴点の座標位置及び前記第1空中写真画像データ及び前記第2空中写真画像データを撮影したときの前記外部標定要素から三角測量の原理に基づいて前記共通特徴点の3次元空間における座標位置を算出するステップと、
前記第3空中写真画像データを撮影したときの座標位置と、前記共通特徴点の3次元空間における座標位置とを結ぶ直線が前記第3空中写真画像データに交差する前記共通特徴点の前記第3空中写真画像データへの投影位置を算出するステップと、
前記投影位置を含む所定の大きさの探索領域を前記第3空中写真画像データに設定するステップと、
前記探索領域に対して前記共通特徴点をパターンマッチングし、マッチング率が閾値以上で最も高いマッチング率でマッチングしたときの前記探索領域における座標位置から前記投影位置までの位置ずれ量及び位置ずれ方向を算出し、誤差ベクトルとして設定するステップと、
前記誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出するステップと、
前記誤差ベクトルが最頻誤差ベクトルとなる位置の前記投影位置に最頻誤差ベクトルを加えた位置を前記共通特徴点に対応する対応点に設定するステップとを含む空中写真画像データの対応点設定方法。
【請求項2】
前記共通特徴点は、前記第2空中写真画像データと重複する前記第1空中写真画像データの領域から所定の大きさの第1サンプル領域を抽出し、前記第1サンプル領域に対応する第2サンプル領域を前記第2空中写真画像データから特定するステップと、
前記第1サンプル領域及び前記第2サンプル領域に表わされた地物の形状のうち特徴のある形状を特徴点抽出フィルタにより第1特徴点及び第2特徴点としてそれぞれ抽出し、抽出された第1特徴点を第2特徴点に対してパターンマッチングして第1特徴点に一致する第2特徴点を検出し、前記第1特徴点と前記第2特徴点とを共通特徴点に設定するステップとにより設定される請求項1記載の空中写真画像データの対応点設定方法。
【請求項3】
撮影位置と撮影姿勢とを含む外部標定要素が紐付けされ、互いに重複する領域において互いに共通する共通特徴点の座標位置が予め設定された第1空中写真画像データ及び第2空中写真画像データと、前記第1空中写真画像データ及び第2空中写真画像データが重複する割合よりも小さい割合で前記第1空中写真画像データ及び前記第2空中写真画像データに対して重複する第3空中写真画像データとから互いに共通する対応点を設定する空中写真画像データの対応点設定装置であって、
前記第1空中写真画像データ及び前記第2空中写真画像データの前記共通特徴点の座標位置及び前記第1空中写真画像データ及び前記第2空中写真画像データを撮影したときの前記外部標定要素から三角測量の原理に基づいて前記共通特徴点の3次元空間における座標位置を算出する共通特徴点座標位置算出手段と、
前記第3空中写真画像データを撮影したときの座標位置と、前記共通特徴点の3次元空間における座標位置とを結ぶ直線が前記第3空中写真画像データに交差する前記共通特徴点の前記第3空中写真画像データへの投影位置を算出する特徴点投影座標位置算出手段と、
前記投影位置を含む所定の大きさの探索領域を前記第3空中写真画像データに設定する探索領域設定手段と、
前記探索領域に対して前記共通特徴点をパターンマッチングし、マッチング率が閾値以上で最も高いマッチング率でマッチングしたときの前記探索領域における座標位置から前記投影位置までの位置ずれ量及び位置ずれ方向を算出し、誤差ベクトルとして設定する誤差ベクトル算出手段と、
前記誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出する最頻誤差ベクトル検出手段と、
誤差ベクトルが最頻誤差ベクトルとなる位置の前記投影位置に最頻誤差ベクトルを加えた位置を前記共通特徴点に対応する対応点に設定する対応点設定手段とを備える空中写真画像データの対応点設定装置。
【請求項4】
前記共通特徴点は、前記第2空中写真画像データと重複する前記第1空中写真画像データの領域から所定の大きさの第1サンプル領域を抽出し、前記第1サンプル領域に対応する第2サンプル領域を前記第2空中写真画像データから特定するサンプル領域設定手段と、
前記第1サンプル領域及び前記第2サンプル領域に表わされた地物の形状のうち特徴のある形状を特徴点抽出フィルタにより第1特徴点及び第2特徴点としてそれぞれ抽出し、抽出された第1特徴点を第2特徴点に対してパターンマッチングして第1特徴点に一致する第2特徴点を検出し、前記第1特徴点と前記第2特徴点とを共通特徴点に設定する共通特徴点検出手段とにより設定される請求項3記載の空中写真画像データの対応点設定装置。
【請求項5】
前記請求項1又は請求項2記載の処理をコンピュータにより実行させる空中写真画像データの対応点設定プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−61204(P2013−61204A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−199029(P2011−199029)
【出願日】平成23年9月13日(2011.9.13)
【出願人】(591074161)アジア航測株式会社 (48)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月13日(2011.9.13)
【出願人】(591074161)アジア航測株式会社 (48)
【Fターム(参考)】
[ Back to top ]