
空中浮遊分析物を空気中で直接検出するための自己励振・自己検出型圧電カンチレバーセンサー
空中浮遊生物学的剤を検出するための、圧電層および非圧電層を含む圧電カンチレバーセンサーを用いた方法。識別実体を2つの層の一方または両方に配置する。空中浮遊種を認識して結合する抗体を、カンチレバーセンサー表面に化学的に固定化することができる。1つの態様において、カンチレバーセンサーは、ベースに1つの端のみが取り付けられる。他の態様において、センサーは第1および第2ベースを含み、圧電層および非圧電層の少なくとも1つは、第1および第2ベースそれぞれに取り付けられて、圧電カンチレバービームセンサーを形成する。この態様において、圧電層上の応力を介して、共振を測定する;かかるセンサーは頑健であり、かつ気体媒体中の空中浮遊種を比較的低い濃度において、十分な感度で検出する、優れた感知特性を示すことが示された。

【発明の詳細な説明】
【技術分野】
【0001】
関連出願の相互参照
本出願は、2007年1月23日出願の米国特許出願第11/625,919号、名称「Self-Exciting, Self-Sensing Piezoelectric Cantilever Sensor」の優先権を主張し、これは本明細書に参照としてその全体が組み込まれる。米国特許出願第11/625,919号は、2006年1月23日出願の米国特許仮出願第60/761,172号、名称「Piezoelectric Cantilever Sensors」および2006年7月11日出願の米国特許仮出願第60/807,020号、名称「Piezoelectric Cantilever Sensors」の優先権を主張する;これらはともに本明細書に参照としてその全体が組み込まれる。本出願はまた、2006年5月10日出願の米国特許仮出願第60/746,951号、名称「Detection of Airborne Pathogens Directly in Air」の優先権も主張し、これも本明細書に参照としてその全体が組み込まれる。
【0002】
技術分野
本技術分野は一般にセンサーに関し、さらに具体的には、圧電カンチレバーセンサーならびに、圧電カンチレバーセンサーを用いて分析物を検出および測定することに関する。
【背景技術】
【0003】
背景
カンチレバーセンサーは、センサーの寸法により、マイクロカンチレバーとマクロカンチレバーの大きく2種類に分類することができる。マイクロカンチレバーセンサーは、静的(曲げ)モードおよび動的(共振)モードの両方で用いることができる。静的モードにおいては、カンチレバーアームの変形を測定して、分析物(分析されている物質)が存在するかどうかを決定する。動的モードにおいては、共振周波数を測定して、分析物が存在するかどうかを決定する。マクロカンチレバーセンサーは一般に静的モードでは用いず、これはカンチレバーアームの曲げが多くの場合制限されているからである。マクロカンチレバーセンサーは、液体浸漬状態または気体中または真空下で用いることができる。一般に、カンチレバーセンサーを液体中より気体/真空中で用いる場合に、感度はより高くなる。液体に湿らせることは感度に悪影響を与える傾向がある。しかし、液体媒体中で分析物を測定することには、多くの実際的な用途がある。
【0004】
既知のマイクロカンチレバーセンサーの1つの種類は、シリコンベースのマイクロカンチレバーセンサーである。代表的なシリコンベースのマイクロカンチレバーセンサーは、共振器として作用するマイクロカンチレバーを含む。マイクロカンチレバーは、マイクロカンチレバーのベースにある外部アクチュエーターにより駆動されて、共振器に振動を発生させる。一般に、振動は外部の光学検波器により検出される。代表的なシリコンベースのマイクロカンチレバーの1つの欠点は、検出に必要な複雑な外部光学部品である。さらに、光学的検出手段は、光学的に透明な試料へのマイクロカンチレバーセンサーの適用を制限するという欠点がある。別の欠点は、外部アクチュエーターによりセンサーに付加される重量および複雑さである。さらに他の欠点は、外部アクチュエーターが、マイクロカンチレバーのベース部にのみ配置可能であることであり、これは、カンチレバーの振動を駆動させる際にその有効性を制限する。シリコンベースのマイクロカンチレバーセンサーのさらなる欠点は、機械的に脆弱であることである。したがって、シリコンベースのマイクロカンチレバーセンサーは、液体流速の高い環境では用いることができない。さらに、代表的なシリコンベースのマイクロカンチレバーセンサーは、液体媒体中では粘性減衰のために検出感度が損われる。
【0005】
既知のカンチレバーセンサーの他の種類は、石英ベースの圧電カンチレバーセンサーである。石英は弱圧電性であり、したがってシリコンベースのカンチレバーセンサーと同様に、石英ベースの圧電カンチレバーセンサーは、液体媒体中では粘性減衰のために検出感度が損われる。さらに、石英ベースのセンサーの検出感度は、センサーの平面形状により制限される。
【0006】
従来の圧電カンチレバーは、圧電層の一部または全表面上に非圧電層を取り付けて製造されることが知られている。いくつかの従来の圧電カンチレバーにおいて、圧電層は1つの端で固定され、そのため圧電材料が励振されると、非圧電層が曲がって圧電材料に生じたひずみに対応する。励振周波数が下にある機械構造の固有周波数に等しい場合、共振が起こる。この型の圧電カンチレバーセンサーは、ミリメートルサイズで約100kHzより低い周波数において動作することが知られている。現在、より高い周波数は、カンチレバーセンサーを非常に短く(長さ1.0mm未満)、非常に狭く(幅0.1mm未満)、および非常に薄く(厚さ100μm未満)することによってのみ、得ることができる。しかし、カンチレバーセンサーの寸法を小さくすると、特に幅を狭めると、粘性減衰のために液体媒体中での使用性が損なわれる。減衰は、カンチレバー幅の二乗に逆比例して増加する。
【0007】
最新のバイオセンシング技術は、蛍光、レーザー、光ファイバーに基づく方法、水晶微量天秤技術、電気化学的酵素免疫測定法、および/または金属粒子への結合に依存する。これらの技術のほとんどは直接的ではなく、定量的でもない。これらの技術の多くはまた、非常に遅い。さらに、前記技術のほとんどは、種々の異なるパラメータを測定する便利な方法を提供可能な、質量変化の測定には役に立たない。
【0008】
共振周波数に基づく質量センサーには3種類の要素、アクチュエーター(ドライバー)、共振器、および検出器が必要である。質量センサーの1例は、シリコンベースのマイクロカンチレバーであり、これは存在するシリコンベースの手法に容易に統合することができる。シリコンベース・マイクロカンチレバー質量センサーにおいて、マイクロカンチレバーは共振器として作用し、マイクロカンチレバーのベースにある外部のチタン酸ジルコン酸鉛(PZT)アクチュエーターにより駆動されて共振器に振動を発生させ、これを外部の光学検波器によって検出することができる。バイオ関連の検出では、受容体がカンチレバー表面に固定化される。カンチレバー表面に固定化された受容体への抗原の結合は、カンチレバーの質量を増加させ、共振周波数の減少を引き起こす。標的分子の検出は、機械的共振周波数のモニタリングにより実現される。シリコンベースのマイクロカンチレバーは評判がよいが、これらは検出において、複雑な外部の光学部品に依存している。さらにPZT振動ドライバーが、センサーの重量および複雑性に付加される。さらに、外部アクチュエーターは、マイクロカンチレバーのベース部にのみ配置可能であり、これは、カンチレバーの振動を駆動させる際にその有効性を制限する。光学検出手段はまた、光学的に透明な試料への適用を制限する。
【0009】
質量検出に加えて、シリコンベースのマイクロカンチレバーはまた、小分子に対するセンサーとしても用いられており、これは、カンチレバー上に発生した応力を、カンチレバーに付随する受容体上に種を吸着して検出することによる。抗体またはDNA受容体でマイクロカンチレバーの表面を被覆して、標的生体分子に結合させる。標的分子の、マイクロカンチレバー表面の受容体への結合または分離の際に発生する応力は、マイクロカンチレバーのたわみを引き起こし、これは外部の光学要素により、またはカンチレバー表面の圧電抵抗性被覆層上の吸着/応力誘発性DC電圧により、検出することができる。
【0010】
シリコンベースのセンサーに比べて、ミリメートルサイズの圧電カンチレバーセンサーは嵩高くなく、複雑でもない。圧電デバイスは、その短い応答時間および高い圧電係数のために、優れた変換候補である。これらは圧電性であるため、機械的共振の駆動および検出を、共振器内で電気的に便利に行うことができる。現在、圧電バイオセンサーは、検出に厚さモード共振を用いるディスクデバイスである、市販の水晶微量天秤(QCM)に基づく。水晶は弱い圧電材料であるが、層厚さのモニターとして広く用いられ、その理由の一部は、膜作製用の大きい単結晶水晶が利用できるためである。10−9g/cm2の最小検出可能質量密度(DMD)を有する5MHzのQCMの典型的な質量検出感度は、約10−8g/Hzであり、ミリメートルサイズの圧電カンチレバーよりも約4桁ほど感度が低い。
【0011】
長さ約100μm、幅数10μm、および厚さ数μmのマイクロカンチレバーが存在する。このようなマイクロカンチレバーは、曲げモードまたは共振モードで検出に用いられる。これらのマイクロカンチレバーの欠点は、その共振特性が粘性減衰のために著しく低下することである。さらに、これらの液体媒体中での使用は、数μl/分の非常に低い流速において実現された。
【0012】
D. W. CarrおよびH. G. Craigheadの「Fabrication of nanoelectromechanical systems in single crystal silicon using silicon on insulator substrates and electron beam lithography」J. vac. Sci. Technology. B., 15(6), 1997. pp 2760-2763には、数百nmオーダーのメッシュ構造のビームセンサーおよび多重ビームセンサーの製造が開示され、40MHzの高い共振周波数が達成された。2007年1月23日出願の米国の同時係属出願第11/659,919号、名称「Self-Exciting, Self-Sensing Piezoelectric Cantilever Sensor」は、本発明者により共同で発明され、ミリメートルサイズの圧電励振カンチレバーセンサーの液体試料環境における構造および基本操作について述べている。
【0013】
したがって、現在存在するセンサーの検出能力を改善することに対する要求、および空中浮遊種を検出するための改善された能力を有するセンサー提供の要求が存在する。
【発明の概要】
【0014】
概要
自己励振・自己検出型圧電カンチレバー検出装置は、圧電層と、これに取り付けられた非圧電層であって、非圧電層の遠位端が圧電層の遠位端を越えて伸びるか、または圧電層の遠位端が非圧電層の遠位端を越えて伸びるような様式で取り付けられている、前記非圧電層とを含む。すなわち、圧電層は非圧電層に、圧電層と非圧電層が同一の広がりを持たない様式で結合している。本圧電カンチレバー検出装置の種々の構成において、圧電層、非圧電層、または両者は、少なくとも1つのベースに固定されている。電極は、圧電層と動作可能に関連する。自己励振・自己検出型圧電カンチレバーセンサーは、質量変化を検出するために用いられる。検出装置上の分析物の質量を決定するために、カンチレバーセンサーの機械要素の共振周波数を測定する。測定された共振周波数をベースライン共振周波数と比較して、周波数の差を決定する。周波数の差は、検出装置上の分析物の質量を示す。
【0015】
本発明の態様によれば、空中浮遊病原体の空気中での検出は、液体または固体マトリックス中での試料収集を必要とすることなく、実施される。1つの側面によれば、例えば生物学的または化学的物質などの標的分析物の空中検出の方法は、検出装置を空中浮遊分析物に暴露することにより実施される。検出装置上に位置する識別実体は分析物に結合し、分析物が気体中に存在している間に検出可能である。具体的な識別実体の例は、化学物質の検出用の化学コーティングおよび生物物質の検出用の固定化抗体を含む。
【0016】
本発明の1つの側面において、検出装置は、圧電層、非圧電層、およびこれら2つの層のどちらかの上に位置する識別実体を含む、センサーを含む。第1の態様において、センサーは、1つの端のみで固定されたカンチレバーアセンブリである。ここで、圧電層はベースに接続され、非圧電層は、圧電層の端に重なり合う様式で取り付けられる。電極は圧電層に取り付けられ、電気的に駆動されて、圧電層に共振を励起する。非圧電層上の識別領域は、気流に暴露された場合に分析物を引き寄せ、圧電層および非圧電層および識別領域の組み合わせにより形成されるカンチレバーの質量変化を引き起こす。ベースライン共振周波数と比較した、分析物が付着した場合の共振周波数の変化を決定し、周波数シフトは、識別実体に保持された分析物の量を示す。
【0017】
センサーの構成は、異なる周波数検出点に適合するために変えてもよい。センサーの第2の型は、ビーム(梁)型のセンサーの使用が関与し、ここで非圧電層は両端でベース構造に取り付けられる。圧電層は非圧電層の上に配置され、上記のように、共振に励起される。非圧電層または圧電層どちらかの上の識別実体は、エアロゾル化された分析物への暴露により、質量変化を引き起こし、ビームセンサーの共振周波数の周波数シフトをもたらす。このようにして分析物を検出することができ、その質量が決定される。センサーの第3の型は、ビームセンサーの変形であり、ここで圧電層はビームであり、非圧電層はビームの最上部に取り付けられる。
【0018】
空中浮遊分析物を検出する装置は、噴霧器に取り付けられたカンチレバーセンサーを含む暴露管を含み、該噴霧器は分析物をエアロゾル化して、分析物を、センサーを横切る気流中に存在させる。分析器はセンサーの共振周波数を測定し、分析物が気流中に存在するかどうか、およびその量を決定する。
【0019】
本発明を特徴づける、これらおよび種々の他の利点および新規な特性は、本明細書に付随するクレームに詳細に指摘され、本明細書の一部を構成する。しかし、本発明、その利点およびその使用により得られる目的物のよりよい理解のために、本明細書のさらなる一部を構成する図および付随する記述事項も参照すべきであり、これらには、本発明の好ましい態様の説明および記載がある。
【0020】
この概要は、選択された概念を単純化した形で紹介するために提供されたものであり、これらについては詳細な説明においてさらに記載される。この概要は、クレームの対象の鍵となる特徴または本質的な特徴を同定することを意図せず、また、クレームの対象の範囲を限定するために用いることも意図しない。
上記の概要および以下の詳細な説明は、添付の図面と併せて読む場合によりよく理解される。自己励振・自己検出型圧電カンチレバーセンサーの説明のために、その例示の構造が図面に示されている;しかし、自己励振・自己検出型圧電カンチレバーセンサーは、開示された特定の方法および手段に限定されるものではない。
【図面の簡単な説明】
【0021】
【図1】図1は、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図2】図2は、例示の自己励振・自己検出型圧電カンチレバーセンサーの断面図であり、圧電層に動作可能に関連する電極用の電極配置領域を示す。
【図3】図3は、例示の自己励振・自己検出型圧電カンチレバーセンサーの断面図であり、自己励振・自己検出型圧電カンチレバーセンサーのベース部内の、例示の電極配置を示す。
【図4】図4は、例示の自己励振・自己検出型圧電カンチレバーセンサーの断面図であり、自己励振・自己検出型圧電カンチレバーセンサーのベース部の外の、例示の電極配置を示す。
【図5】図5は、圧電層の遠位端が非圧電層の遠位端とぴったり重なっている、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図6】図6は、圧電層の遠位端が非圧電層の遠位端を越えて伸び、圧電層の隣接端が非圧電層の隣接端を越えて伸びている、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図7】図7は、2つのベース部を有する、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図8】図8は、圧電層がどちらのベース部にも取り付けられていない、自己励振・自己検出型圧電カンチレバーセンサーの他の例示の構成の図である。
【図9】図9は、2つの端で固定された圧電層を有する、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図10】図10は、圧電層が2つの部分を有し、その1つが固定された、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図11】図11は、圧電層が2つの部分を有し、その1つが固定された、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の別の図である。
【図12】図12は、圧電層が2つの部分を有し、そのどちらもが固定されていない、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図13】図13は、固定された非圧電部と、固定されていない圧電部とを有する、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図14】図14は、非圧電層がどちらのベース部にも取り付けられていない、自己励振・自己検出型圧電カンチレバーセンサーの他の例示の構成の図である。
【図15】図15は、圧電部が、圧電部と異なる幅を有する、自己励振・自己検出型圧電カンチレバーセンサーの他の例示の構成の図である。
【図16】図16は、圧電層と非圧電層を含む、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図であり、ここで圧電層の幅は非圧電層16の幅より狭く、圧電層の遠位端は非圧電層の遠位端を越えて伸び、圧電層の隣接端は非圧電層の隣接端を越えて伸びている。
【図17】図17は、自己励振・自己検出型圧電カンチレバーセンサーを利用して、分析物を検出するための例示の方法のフロー図である。
【図18】図18は、空気中で作動された、図1に示す自己励振・自己検出型圧電カンチレバーセンサーの構成の、例示の共振スペクトルのプロットである。
【図19A】図19Aは、本発明の方法において有用な圧電カンチレバーセンサーの斜視図である。
【図19B】図19Bは、本発明の方法において有用な固定圧電励振カンチレバービームセンサーの態様の図である。
【図19C】図19Cは、本発明の方法において有用な浮動圧電励振カンチレバービームセンサーの態様の図である。
【図19D】図19Dは、本発明の方法において有用な固定バイモルフ圧電励振カンチレバービームセンサーの態様の図である。
【図19E】図19Eは、本発明の方法において有用なオーバーハング型圧電励振カンチレバービームセンサーの態様の図である。
【図19F】図19Fは、本発明の方法において有用な固定チタン酸ジルコン酸鉛(PZT)圧電励振カンチレバービームセンサーの態様の図である。
【図19G】図19Gは、本発明による浮動先端PEMC(ftPEMC)センサーの態様の概略図である。
【図20】図20は、図1に示すものなどのオーバーハング型圧電カンチレバーセンサーの第1の態様の、空気中における共振スペクトルである(図47表1のoPEMC#1参照)。
【図21】図21は、1に示すオーバーハング型圧電カンチレバーセンサーの第2の態様の、空気中における共振スペクトルである(図47表1のoPEMC#2参照)。
【図22】図22は、図1に示すオーバーハング型圧電カンチレバーセンサーの第3の態様の、空気中における共振スペクトルである(図47表1のoPEMC#3参照)。
【図23】図23は、図1に示すオーバーハング型カンチレバーセンサーの第4の態様の、空気中における共振スペクトルである(図47表1のoPEMC#4参照)。
【図24】図24は、図1に示すオーバーハング型カンチレバーセンサーの第5の態様の共振スペクトルである(図47表1のoPEMC#5参照)。
【図25】図25は、100mVで励振された固定PEMCBセンサー(aPEMCB、図19B)の、空気中における、位相角対励振周波数の共振スペクトルプロットである。
【図26】図26は、浮動PEMCB(fPEMCB#1、図19C)センサーの、空気中100mVの励振電圧における、位相角対励振周波数プロットを用いた共振特性を示す図である。
【図27】図27は、固定バイモルフPEMCB(abPEMCB#1、図19D)センサーの、空気中100mVの励振電圧における、位相角対励振周波数プロットを用いた共振スペクトルである。
【図28】図28は、オーバーハング型PEMCB(oPEMCB#1、図19E)センサーの、空気中100mVの電圧で励振された場合の共振スペクトルである。
【図29A】図29Aは、空中浮遊炭疽菌検出の実装に用いる装置の図である。
【図29B】図29Bは、空中浮遊炭疽菌検出の実装に用いる装置の図である。
【図30A】図30Aは、空気中で炭疽菌を検出する検出実験の結果を示す図である。
【図30B】図30Bは、対照として無機粒子を用いた、空気中で炭疽菌を検出する検出実験の結果を示す図である。
【図31】図31は、図30Aの実験についての検出の確認を示す図である。
【図32】図32は、本発明の方法により試験されたセンサーの走査型電子顕微鏡写真であり、センサー表面に固定化された炭疽菌胞子を示す。
【図33】図33は、本発明の湿度注入器の側面を示す図である。
【図34】図34は、本発明の方法のフロー図である。
【図35】図35は、センサーのノッチ構造を示す図である。
【図36】図36は、センサーのサンドイッチ構造を示す図である。
【図37】図37は、センサーの代替のサンドイッチ構造を示す図である。
【図38】図38は、センサー形状について図19Aの代替を示す図である。
【図39】図39は、図19Aのセンサーの別の代替の構成を示す図である。
【図40】図40は、図19Fのビーム型構造を示す図である。
【図41】図41は、図19Eの代替の構成を示す図である。
【図42】図42は、図19Gの代替の構成を示す図である。
【図43】図43は、図42の代替の構成を示す図である。
【図44】図44は、図36の代替の構成を示す図である。
【図45】図45は、層が少なくとも部分的にベースに固定されている、複数層のセンサーの構成を示す図である。
【図46】図46は、修正されたベースを有する構成を示す図である。
【図47】図47は、表1を含む図である。
【図48】図48は、表2を含む図である。
【図49】図49は、表3を含む図である。
【図50】図50は、表4を含む図である。
【発明を実施するための形態】
【0022】
例示の態様の詳細な説明
本明細書に記載の自己励振・自己検出型圧電カンチレバーセンサーは、極少量の分析物を検出および測定する能力を提供する。自己励振・自己検出型圧電カンチレバーセンサーは、液体中に浸漬された分析物、および気体または真空中に含まれる分析物を、検出および測定するために用いることができる。種々の例示の構成において、自己励振・自己検出型圧電カンチレバーセンサーは、少なくとも1つの圧電層および少なくとも1つの非圧電層を含み、ここで圧電層は非圧電層に、圧電層と非圧電層が同一の広がりを持たない様式で結合している。圧電層、非圧電層、または両者は、少なくとも1つのベースに固定されている。圧電層および非圧電層は、種々の幅、長さおよび厚さであることができる。
【0023】
自己励振・自己検出型圧電カンチレバーセンサーは、その上に蓄積された分析物の質量を決定するために用いることができる。1つの例示の態様において、自己励振・自己検出型圧電カンチレバーセンサーの一部は媒体中(例えば、液体、気体、真空)に配置される。媒体中にあって、自己励振・自己検出型圧電カンチレバーセンサーの共振周波数を測定し、ベースライン共振周波数と比較する。測定された共振周波数とベースライン共振周波数の差は、自己励振・自己検出型圧電カンチレバーセンサーに蓄積された(例えば、結合された、吸着された、吸収された)分析物の質量を示す。
【0024】
分析物は、自己励振・自己検出型圧電カンチレバーセンサーの非圧電部の表面に、直接または間接的に結合されることができる。分析物の、自己励振・自己検出型圧電カンチレバーセンサーの非圧電部への結合は、自己励振・自己検出型圧電カンチレバーセンサーの質量の変化、自己励振・自己検出型圧電カンチレバーセンサーの剛性の変化、またはこれらの組み合わせを引き起こす。質量および/または剛性の変化は、共振周波数の変化として測定することができ、適切な分析装置、例えばオペアンプ、インピーダンスアナライザー、ネットワークアナライザー、発振回路などにより、モニタリングおよび測定可能である。自己励振・自己検出型圧電カンチレバーセンサーの少なくとも一部のみが液体中に浸漬された場合の共振周波数の変化は、検出可能で測定可能である。自己励振・自己検出型圧電カンチレバーセンサーの少なくとも一部のみが気体または真空中に浸漬された場合の共振周波数の変化も、検出可能で測定可能である。
【0025】
自己励振・自己検出型圧電カンチレバーセンサーは、例えば0.1MHz〜6MHzのオーダーなどの高周波数においても動作可能である。これらの高周波数において、Q係数(共振ピーク周波数の、共振ピーク高さの中点におけるピーク幅に対する比率)で10〜100のオーダーの値を、液体浸漬下で得ることができる。自己励振・自己検出型圧電カンチレバーセンサーは、液体媒体、気体媒体および真空媒体中で比較的高周波数において動作可能である。したがって自己励振・自己検出型圧電カンチレバーセンサーは、質量変化に対して極限の感度を提供する。自己励振・自己検出型圧電カンチレバーセンサーは、媒体中に非常に低濃度で存在する分析物に対して特に好適であり、媒体は例えば、体液、水、および食品材料などである。
【0026】
本明細書に記載の自己励振・自己検出型圧電カンチレバーセンサーは、液体媒体中に浸漬された場合に、100アトグラム/Hz(100×10−18g/Hz)以下もの少量で蓄積された質量における変化を検出する能力を提供する。したがって、質量変化を検出することについて、自己励振・自己検出型圧電カンチレバーセンサーの感度は、石英結晶マイクロカンチレバーセンサーより約百万倍、標準の分析装置より約100,000倍、そして従来の3層圧電カンチレバー設計より約10,000倍も高い。
【0027】
自己励振・自己検出型圧電カンチレバーセンサーは、その非圧電部に結合した極小濃度の分析物の検出を可能とする。自己励振・自己検出型圧電カンチレバーセンサーを用いると、病原体およびタンパク質は、数個の病原体/mLまでの濃度において、および平均サイズ(60kダルトン、kDa)のタンパク質については、1病原体/mL未満での濃度で検出可能である。さらに、非圧電部の有機または無機官能基に結合する任意の分析物が検出可能である。自己励振・自己検出型圧電カンチレバーセンサーは、比較的高い流速の媒体中で動作可能である。圧電カンチレバーセンサーは、流速0.5〜10.0mL/分を有する媒体中で動作可能であり、これは、既知の曲げモードマイクロカンチレバーで成功して用いられる流速より、約1000倍速い。
【0028】
本圧電カンチレバーの種々の例示の用途は以下を含む:炭疽菌などのバイオテロリズム剤の検出、大腸菌などの食品媒介病原体の検出、食品および水中の病原体の検出、体液中のある細胞型(例えば、循環する腫瘍細胞)の検出、体液中のバイオマーカー(例えば、特定の病態生理をマークするタンパク質、α−フェトタンパク質、β2−ミクログロブリン、膀胱癌抗原、乳癌マーカーCA−15−3、および他のCA類(癌抗原)、カルシトニン、癌胎児性抗原、その他)の検出、例えばトリニトロトルエン、ジニトロトルエンの存在などの爆発性マーカーの検出、および空気媒介毒素および水媒介毒素の検出。自己励振・自己検出型圧電カンチレバーセンサーはまた、ピコグラムレベルでの生物学的実体の検出および、タンパク質−タンパク質相互作用の、静的および動的両方の状態での検出にも用いることができる。
【0029】
病原体、例えば大腸菌は、自己励振・自己検出型圧電カンチレバーセンサーを用いて検出可能である。モデルタンパク質、リポタンパク質、DNAおよび/またはRNAの、1.0フェムトグラム/mL(10−15g)の濃度での、および病原体の、1病原体/mLでの検出もそれぞれ、液体中で直接、標的分析物に特異的な抗体で固定化された自己励振・自己検出型圧電カンチレバーセンサーを用いて、約1〜2MHzの周波数で測定することにより実現可能である。自己励振・自己検出型圧電カンチレバーセンサーは、汚染物質が存在する場合でも、擬陽性または擬陰性なしに、標的分析物を検出することができる。本明細書に記載の自己励振・自己検出型圧電カンチレバーセンサーは、加工なし、調製なし、濃縮段階なし、および/またはいかなる種類の濃縮なしの生の試料に用いる場合に特に有利である。自己励振・自己検出型圧電カンチレバーセンサーを用いた分析物の検出は、流れる状態のもとで、例えば0.5〜10.0mL/分での、生の試料中で直接行うことができる。クリーンな試料が利用可能である場合、例えば研究室環境などでは、1フェムトグラム/mLでの検出も可能である。この感度は、既知の光学技術に付随する感度より約100倍も高い。
【0030】
以下に記載するように、自己励振・自己検出型圧電カンチレバーセンサーの感度は、一つにはそれ自身の幾何学的デザインによる。自己励振・自己検出型圧電カンチレバーセンサーの圧電層と非圧電層の相対的な長さと幅が、感度を決定し、また自己励振・自己検出型圧電カンチレバーセンサーが提供する周波数スペクトルのピーク形状も決定する。以下にさらに詳細に説明するように、自己励振・自己検出型圧電カンチレバーセンサーは、一緒に結合された圧電層および非圧電層を含み、これらは、圧電層の一部が非圧電層を越えて伸びるか、または非圧電層の一部が圧電層を越えて伸びるか、またはこれらの組み合わせであるような様式で結合される。したがって、圧電層と非圧電層は、同一の広がりを持たない。すなわち、自己励振・自己検出型圧電カンチレバーセンサーは、非圧電層の表面全体が圧電層の表面全体に結合されてはいない様式で構成されている。
【0031】
自己励振・自己検出型圧電カンチレバーセンサーの感度は、一つにはカンチレバーセンサーの圧電層を動作および検出の両方に用いていること、および自己励振・自己検出型圧電カンチレバーセンサーの圧電層の電気機械的特性による。共振において、振動するカンチレバーは、圧電層の応力を、自己励振・自己検出型圧電カンチレバーセンサーのベース部分に集中させる。これにより、圧電層の抵抗成分に増幅された変化がもたらされ、共振周波数に大きなシフトが生じる。この応力を、低い曲げ係数を有する圧電層の部分(例えばよりフレキシブルな部分)に導くことにより、共振周波数の関連するシフトの探索が可能となって、自己励振・自己検出型圧電カンチレバーセンサーの質量における、極めて小さな変化が検出される。例えば、圧電カンチレバーセンサーの圧電層と非圧電層の両方が同じ端において固定されている場合(例えば、エポキシに入れられた場合)、センサーは質量変化に対して感度が低いが、これは、固定端に近接した検出圧電層の曲げ応力が、圧電層のみが固定された場合に比べて小さいからである。これは、組み合わされた2層の曲げ係数が、圧電層のみを固定した場合より高いためである。曲げ係数は、弾性係数と中性軸周りの慣性モーメントの積である。そして慣性モーメントは、厚さの三乗に比例する。
【0032】
図1は、圧電部14および非圧電部16を含む、自己励振・自己検出型圧電カンチレバーセンサー12の図である。圧電部は大文字のP、非圧電部は大文字のNPと表示されている。自己励振・自己検出型圧電カンチレバーセンサー12は、無固定でオーバーハング型の、自己励振・自己検出型圧電カンチレバーセンサーの1形態を示す。自己励振・自己検出型圧電カンチレバーセンサー12が「無固定」と呼ばれるのは、非圧電層16がベース部20に取り付けられていないからである。自己励振・自己検出型圧電カンチレバーセンサー12が「オーバーハング型」と呼ばれるのは、非圧電層16が圧電層14の遠位端24を越えて伸び、非圧電層16のオーバーハング部分22を作り出しているからである。圧電部14は非圧電部16に、接着部18を介して結合される。圧電部14および非圧電部は、領域23で重なり合っている。接着部18は、圧電部14と非圧電部16の重なり部分の間に位置する。圧電部14は、ベース部20に結合されている。
【0033】
圧電部14は任意の好適な材料、例えば、チタン酸ジルコン酸鉛、マグネシウムニオブ酸鉛−チタン酸鉛固溶体、チタン酸鉛ストロンチウム、石英シリカ、圧電セラミックチタン酸ジルコン酸鉛(PZT)、および圧電セラミック−ポリマー繊維複合材等を含むことができる。非圧電部16は、任意の好適な材料、例えばガラス、セラミック、金属、ポリマー、および1または2以上のセラミックとポリマーの複合材、例えば二酸化ケイ素、銅、ステンレス鋼、チタン等を含むことができる。
【0034】
自己励振・自己検出型圧電カンチレバーセンサーは、任意の適当な組み合わせの寸法を有する部分を含むことができる。さらに、物理的寸法は一定でなくてもよい。したがって、圧電層および/または非圧電層は先細形状であることができる。例えば、圧電部(例えば圧電部14)の長さ(例えば図1のLP)は、約0.1〜約10mmの範囲であることができる。非圧電部(例えば非圧電部16)の長さ(例えば図1のLNP)は、約0.1〜約10mmの範囲であることができる。重なり領域(例えば重なり領域23)は、約0.1〜約10mmの範囲の長さであることができる。圧電部(例えば圧電部14)の幅(例えば図1のWP)、および非圧電部(例えば非圧電部16)の幅(例えば図1のWNP)は、約0.1mm〜約4.0mmの範囲であることができる。圧電部の幅(例えば図1のWP)は、非圧電部の幅(例えば図1のWNP)と異なっていてもよい。圧電部(例えば圧電部14)の厚さ(例えば図1のTP)、および非圧電部(例えば非圧電部16)の厚さ(例えば図1のTNP)は、約0.1mm〜約4.0mmの範囲であることができる。圧電部の厚さ(例えば図1のTP)もまた、非圧電部の厚さ(例えば図1のTNP)と異なることができる。
【0035】
図2は、自己励振・自己検出型圧電カンチレバーセンサー12の断面図であり、圧電部14と動作可能に関連する電極のための、電極配置領域26を示す。電極は、括弧26で示すように、自己励振・自己検出型圧電カンチレバーセンサーの圧電部の上の任意の適切な位置に配置することができる。例えば、図3に示すように、電極28は、ベース部20内の圧電部14に結合することができる。または、図4に示すように、電極32は、圧電部14の、ベース部20内以外の任意の位置であってかつ非圧電部16が重なっていない位置に結合することができる。電極は、圧電部14に対して対称的に配置する必要はない。例示の態様において、1つの電極は圧電部14のベース部20内に、他の電極は圧電部14のベース部20以外の位置に、結合することができる。電極、または任意の適切な手段(例えば、誘電手段、無線手段)を用いて、電気信号を圧電部14へと提供し、またはこれから受け取ることができる。1つの例示の態様において、電極は圧電部14に、接着パッドなど(図3の要素30、および図4の要素34)を介して、結合することができる。例示の接着パッドは、化学センシングまたは生物センシングで用いるのに適当な受容体材料および/または吸収材料を不動化することができる、任意の適切な材料(例えば、金、二酸化ケイ素)を含むことができる。
【0036】
電極は、任意の適切な位置に配置することができる。1つの例示の態様において、電極は圧電層14の応力集中の位置近くに、動作可能に配置される。上述したように、自己励振・自己検出型圧電カンチレバーセンサーの感度は部分的に、応力を圧電層14に有利に導く(集中させる)ことおよび、この近くに電極を配置することによる。本明細書に記載された自己励振・自己検出型圧電カンチレバーセンサー(およびその変形)の構成は、振動関連応力を圧電層14に集中させる傾向がある。共振において、自己励振・自己検出型圧電カンチレバーセンサーの幾つかの構成では、振動するカンチレバーは、圧電層14のベース部20に近い部分に応力を集中させる。これにより、圧電層14の抵抗成分に増幅された変化がもたらされ、応力の高い部位において共振周波数の大きなシフトが生じる。この応力を、低い曲げ係数を有する(例えば、よりフレキシブルである)圧電層14の部分に導くことにより、共振周波数の関連するシフトの探索が可能となって、自己励振・自己検出型圧電カンチレバーセンサーの質量における、極めて小さな変化が検出される。したがって、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成において、ベース部20近くに位置する圧電層14の厚さは、ベース部20から遠い部分の圧電層14より薄い。これにより、応力を圧電層14のより薄い部分に向けて集中させる傾向となる。例示の構成において、電極を、自己励振・自己検出型圧電カンチレバーセンサーのベース部近くの、振動関連集中応力の位置またはその近くに配置する。自己励振・自己検出型圧電カンチレバーセンサーの他の例示の構成において、電極を、自己励振・自己検出型圧電カンチレバーセンサーのベース部への集中応力の近接度に関わりなく、圧電層における集中応力の位置に近接して配置する。
【0037】
自己励振・自己検出型圧電カンチレバーセンサーは、複数の構成にしたがって構成することができ、これらの幾つかは図5〜図16に示されている。しかし、本明細書に示されている構成は全ての可能な構成を表すものではなく、むしろ自己励振・自己検出型圧電カンチレバーセンサーの構成の代表的な例を表すものであることが理解される。図5は、無固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成36の図であり、ここで圧電部14の遠位端40は、非圧電部16の遠位端38とぴったり重なっている。自己励振・自己検出型圧電カンチレバーセンサー36を「無固定」と呼ぶのは、非圧電部16がベース部20に取り付けられていないからである。圧電部14は、非圧電部16に接着部18を介して結合される。接着部18は、圧電部14と非圧電部16の重なり部分の間に位置する。圧電部14は、ベース部20に結合される。
【0038】
図6は、無固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成42の図であり、ここで圧電部14の遠位端44は、非圧電部16の遠位端46を越えて伸びており、圧電部14の隣接端43は、非圧電部16の隣接端45を越えて伸びている。圧電部14は、非圧電部16に接着部18を介して結合される。接着部18は、圧電部14と非圧電部16の重なり部分の間に位置する。圧電部14は、ベース部20に結合される。
【0039】
自己励振・自己検出型圧電カンチレバーセンサーはまた、複数のベース部を含むように構成することもできる。複数のベース部を含む自己励振・自己検出型圧電カンチレバーセンサーの例示の構成を、図7〜図14に示す。自己励振・自己検出型圧電カンチレバーセンサーを、複数のベース部を含むように構成することは、直感的に分かりにくいが、これは、当業者の期待としては、自己励振・自己検出型圧電カンチレバーセンサーの両端を固定することで、自己励振・自己検出型圧電カンチレバーセンサーを複数のベース部に固定した結果自己励振・自己検出型圧電カンチレバーセンサーの変位の制限が生じて、応答の劣化をもたらすからである。2つのベース部を含む自己励振・自己検出型圧電カンチレバーセンサーの構成に関して、1つの例示の態様において、圧電部の変位でなく、圧電部の応力を測定する。自己励振・自己検出型圧電カンチレバーセンサーを、2つのベース部を含むように構成すると、比較的高い媒体流の条件のもとで動作し、優れた質量変化感度を提供可能な、安定で堅固なセンサーが提供される。機械的に堅固な自己励振・自己検出型圧電カンチレバーセンサーであって、比較的広い範囲の媒体流条件に対し、性能の最小の決定力で耐用できる前記センサーを提供すると共に、自己励振・自己検出型圧電カンチレバーセンサーを2つのベース部を含むように構成することにより、1つのベース部を有する類似寸法のカンチレバーセンサーと比べて、3〜4倍高い(例えば100kHzより高い)基本周波数を提供する。
【0040】
図7は、2つのベース部20、50を含む、固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成48の図である。自己励振・自己検出型圧電カンチレバーセンサー48を「固定」と呼ぶのは、非圧電部16がベース部20に取り付けられているからである。自己励振・自己検出型圧電カンチレバーセンサー48に示す構成において、圧電部14の隣接端52と非圧電部16の隣接端54の両方は、ベース部20に取り付けられている。圧電部と非圧電部は、任意の適切な手段を介してベース部に取り付けることができる。非圧電部16の遠位端58もまた、ベース部50に取り付けられている。非圧電部16の遠位端58は、圧電部14の遠位端56を越えて伸びている。圧電部14は、非圧電部16に接着部18を介して結合される。接着部18は、圧電部14と非圧電部16の重なり部分の間に位置している。
【0041】
図8は、2つのベース部20、50を含む、固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成60の図であり、ここで圧電部14は、ベース部20またはベース部50のどちらにも取り付けられていない。自己励振・自己検出型圧電カンチレバーセンサー60に示す構成において、非圧電部16の隣接端62はベース部20に取り付けられ、非圧電部16の遠位端64はベース部50に取り付けられている。非圧電部16の隣接端62は、圧電部14の隣接端66を越えて伸び、非圧電部16の遠位端64は、圧電部14の遠位端68を越えて伸びている。圧電部14は、非圧電部16に接着部18を介して結合される。接着部18は、圧電部14と非圧電部16の重なり部分の間に位置している。
【0042】
図9は、固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成70の図であり、これは2つのベース部20、50を含み、2つの圧電部14、72を含み、および2つの接着部18、74を含む。自己励振・自己検出型圧電カンチレバーセンサー70に示す構成において、圧電部14の隣接端76および非圧電部16の隣接端78は、ベース部20に取り付けられている。圧電部72の遠位端80および非圧電部16の遠位端82は、ベース部50に取り付けられている。非圧電部16の隣接端78は、圧電部72の隣接端86を越えて伸びている。非圧電部16の遠位端82は、圧電部14の遠位端84を越えて伸びている。圧電部14の遠位端84と、圧電部72の隣接端86は、その間にスペース88を形成する。圧電部14は、非圧電部16に接着部18を介して結合される。圧電部72は、非圧電部16に接着部74を介して結合される。接着部18および74はそれぞれ、圧電部14と非圧電部16、および圧電部72と非圧電部16の重なり部分の間に位置している。
【0043】
図9に示す構成70についての種々の代替的例示構成においては、圧電部14、72の1つのみが、それぞれのベース部20、50に取り付けられる。例えば、図10に示した1つの例示の構成においては、圧電部14がベース部20に取り付けられ、圧電部72はベース部50に取り付けられていない。別の例示の構成においては、図11に示すように、圧電部72がベース部50に取り付けられ、圧電部14はベース部20に取り付けられていない。さらに別の例示の構成においては、図12に示すように、圧電部14も圧電部72も、それぞれのベース部20、50に取り付けられていない。圧電層が複数の部分からなっている種々の例示の構成において、電極は任意の1または2以上の圧電部に取り付けることができる。例えば、図9、図10、図11および図12に示す例示の構成において、電極は圧電部14、圧電部72、またはこれらの組み合わせに取り付けることができる。
【0044】
図13は、2つのベース部20、50を含む、固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成90の図であり、ここで圧電部14はベース部20に取り付けられ、非圧電部16はベース部50に取り付けられている。圧電部14は、非圧電部16に接着部18を介して結合される。接着部18は、圧電部14と非圧電部16の重なり部分の間に位置している。非圧電部16の遠位端98は、圧電部14の遠位端96を越えて伸びている。圧電部14の隣接端92は、非圧電部16の隣接端94を越えて伸びている。
【0045】
図14は、2つのベース部20、50を含む、固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成100の図であり、ここで非圧電部16は、ベース部20とベース部50のどちらにも取り付けられていない。自己励振・自己検出型圧電カンチレバーセンサー100に示す構成において、圧電部14の隣接端102は、ベース部20に取り付けられており、圧電部14の遠位端104は、ベース部50に取り付けられている。圧電部14の隣接端102は、非圧電部16の隣接端106を越えて伸びており、圧電部14の遠位端104は、非圧電部16の遠位端108を越えて伸びている。圧電部14は、非圧電部16に接着部18を介して結合される。接着部18は、圧電部14と非圧電部16の重なり部分の間に位置している。
【0046】
図15は、圧電部14と非圧電部16を含む、無固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成110の図であり、ここで圧電部の幅WPは、非圧電部の幅WNPより小さい。図15に示す構成110は、図1に示した構成12に類似であるが、ただし、WPはWNPより小である。したがって、自己励振・自己検出型圧電カンチレバーセンサー110は、無固定のオーバーハング型自己励振・自己検出型圧電カンチレバーセンサーの態様を示す。圧電部14は、非圧電部16に接着部(図15には接着部は示されず)を介して結合される。接着部は、圧電部14と非圧電部16の重なり部分の間に位置している。圧電部14はベース部20に結合される。
【0047】
図16は、圧電部14と非圧電部16を含む、無固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成112の図であり、ここで圧電部の幅WPは非圧電部の幅WNPより小さく、および圧電部14の遠位端114は、非圧電部16の遠位端116を越えて伸びており、圧電部14の隣接端118は、非圧電部16の隣接端120を越えて伸びている。図16に示す構成112は、図6に示した構成42に類似であるが、ただし、WPはWNPより小である。圧電部14は、非圧電部16に接着部(図16には接着部は示されず)を介して結合される。接着部は、圧電部14と非圧電部16の重なり部分の間に位置している。圧電部14はベース部20に結合される。
【0048】
図17は、自己励振・自己検出型圧電カンチレバーセンサーを用いた、分析物を検出するための例示の方法のフロー図である。自己励振・自己検出型圧電カンチレバーセンサーは、ステップ120において提供される。自己励振・自己検出型圧電カンチレバーセンサーは、上記に従って構成するか、またはこれらの任意の適切な変形に従って構成することができる。自己励振・自己検出型圧電カンチレバーセンサーは、ステップ122において分析物を受け取るよう準備する。例示の態様において、分析物の誘引物質を自己励振・自己検出型圧電カンチレバーセンサーの非圧電部に適用する。誘引物質は分析物に特異的である。したがって、誘引物質は標的分析物を引き付けるが、他の物質は引き付けない。例えば、自己励振・自己検出型圧電カンチレバーセンサーの非圧電部は、以下を引き付けるための誘引物質を含むことができる:炭疽菌などのバイオテロリズム剤、大腸菌などの食品媒介病原体、食品および水中の病原体、体液中の細胞型(例えば、循環する腫瘍細胞)、体液中のバイオマーカー(例えば、特定の病態生理をマークするタンパク質、α−フェトタンパク質、β2−ミクログロブリン、膀胱癌抗原、乳癌マーカーCA−15−3、および他のCA類(癌抗原)、カルシトニン、癌胎児性抗原、その他)、例えばトリニトロトルエン、ジニトロトルエンなどの爆発性マーカー、空気媒介毒素および水媒介毒素、タンパク質などの生物学的実体、およびこれらの組み合わせ。
【0049】
自己励振・自己検出型圧電カンチレバーセンサーを、ステップ124において媒体に暴露する。媒体は、任意の適切な媒体、例えば液体、気体、液体と気体の組み合わせ、または真空などを含むことができる。媒体は、広い範囲の流動状態を示すことができる。標的分析物が媒体中に存在する場合、標的分析物は、誘引物質で処理された自己励振・自己検出型圧電カンチレバーセンサーの非圧電部に蓄積する。上記のように、標的分析物が自己励振・自己検出型圧電カンチレバーセンサーの非圧電部に蓄積(例えば結合)すると、自己励振・自己検出型圧電カンチレバーセンサーの剛性の変化、および/または自己励振・自己検出型圧電カンチレバーセンサーの質量の増加をもたらし、これにより自己励振・自己検出型圧電カンチレバーセンサーの共振周波数が減少する。
【0050】
自己励振・自己検出型圧電カンチレバーセンサーの共振周波数は、ステップ126で測定する。共振周波数は、任意の適切な手段により、例えばオペアンプ、インピーダンスアナライザー、ネットワークアナライザー、発振回路などにより、測定することができる。自己励振・自己検出型圧電カンチレバーセンサーの圧電部の圧電材料が励振されると、自己励振・自己検出型圧電カンチレバーセンサーの非圧電部が曲がって、圧電材料に生じたひずみに対応する。励振周波数が下にある機械構造の固有周波数に等しい場合、共振が起こる。
【0051】
測定した共振周波数を、ステップ128においてベースライン共振周波数と比較する。ベースライン共振周波数は、分析物が蓄積していない、自己励振・自己検出型圧電カンチレバーセンサーの共振周波数である。測定した共振周波数とベースライン共振周波数の間の周波数の差(周波数シフト)が計測されない場合(ステップ130において)、ステップ132において、分析物が検出されなかったと決定する。測定した共振周波数とベースライン共振周波数の間の周波数の差が計測された場合は(ステップ130において)、ステップ134において、分析物が検出されたこと、すなわち分析物が媒体中に存在することを決定する。ステップ136において、自己励振・自己検出型圧電カンチレバーセンサーの非圧電部に蓄積された分析物の質量を、ステップ130で計測した周波数シフトに応じて決定する。
【0052】
自己励振・自己検出型圧電カンチレバーセンサーの種々の構成を利用して、種々の実験が実施されている。図18は、図1に示す、空中で作動された自己励振・自己検出型圧電カンチレバーセンサーの構成12の、例示の共振スペクトルのプロット137である。幅Wpおよび幅WNPは、それぞれ約2mmである。プロット137は、励振電圧100mVでの、位相角(励振電圧と励振電流の間)対励振周波数を示す。第1共振周波数モード140は、およそ150〜200kHzの間で起こり、第2共振周波数モード142は、およそ250〜300kHzの間で起こった。共振スペクトルは、約980kHz、2.90MHzおよび4.60MHzにおいて、高次の特性ピークを示す。
【0053】
性質係数を、共振周波数の、ピーク高さの中点におけるピーク幅に対する比率として決定した。その結果、性質係数は、共振ピークの鮮鋭度の測度である。実験により、自己励振・自己検出型圧電カンチレバーセンサーの性質係数は、センサーが真空から液体流の環境までの異なる環境中に置かれた場合にも、大幅に減少しないことが示された。実験により、自己励振・自己検出型圧電カンチレバーセンサーの種々の構成のQ値は、ピークが検出された位置でのそれぞれの周波数モードに依存して、一般に10〜70の範囲であることも示された。自己励振・自己検出型圧電カンチレバーセンサーの種々の構成は、真空、空気および流れを含む粘性の環境中で用いられた場合に、一般にそのQ値は20%〜35%を超えて減少しなかった。性質係数の全体的な値における比較的小さなこの損失は、自己励振・自己検出型圧電カンチレバーセンサーの持つ能力、すなわち化学物質および種々の生物学的項目を、水および血流を含む粘性の環境中で正確に検出する能力を反映するものである。
【0054】
実験により、自己励振・自己検出型圧電カンチレバーセンサーの感度は、その寸法の関数であることが示された。自己励振・自己検出型圧電カンチレバーセンサーの形状寸法における特定の変化は、センサーの質量変化感度を増強し、したがって、低濃度の分析物を検出するセンサーの応答を強化する。共振スペクトル、すなわち空気中の位相角対励振周波数のプロットは、それぞれ102±0.05、970±0.05、および1810±0.05kHzにおいて、優勢な曲げモード共振ピークを示した。自己励振・自己検出型圧電カンチレバーセンサーの形状寸法を変えることにより、センサーの共振特性が強化された。対応する曲げ共振モードは、より高い周波数で起こり、より大きい位相角を有し、これは自己励振・自己検出型圧電カンチレバーセンサーの共振ピークが、より感度が高く、減衰がより少ないことを示唆した。
【0055】
1つの例示の実験において、自己励振・自己検出型圧電カンチレバーセンサーの質量変化感度を測定した。既知の質量のパラフィンワックスを、自己励振・自己検出型圧電カンチレバーセンサーのガラス表面に付加し、共振周波数の変化を用いて、g/Hzで表した質量感度を計算した。液体中での質量変化感度を、直接測定した;さらに、質量を付加する前後における共振周波数の変化に対する、既知の質量の比率も測定した。液体中で測定した共振モードの質量感度は、1.5×10−15g/Hzと決定された。
【0056】
圧電カンチレバーセンサーの空中浮遊分析物検出への適用
出願人は、気相における標的分析物の検出に関する、公表された情報を見出せなかった。本発明は、気相における標的分析物の、分析物をセンサー内の識別実体に結合することによる検出に関する。識別実体は、標的分析物への親和性を示す。生物学的識別実体の例は、ポリクローナルおよびモノクローナル抗体、単鎖抗体(scFv)、アプタマー(標的分子を検出するために特異的に開発された合成DNA)、組換えおよび天然ファージなどを含む。1つの態様において、例えば本明細書に記載されたような周波数変換法を用いる場合、検出器は、空中浮遊分析物の濃度を検出するための識別実体として、固定化抗体を使用する。固定化抗体は、識別実体として、空中検出のために用いるセンサー表面に取り付けられる抗体である。この種類の空中検出は、細菌、ウィルス、接合子嚢、プリオンおよび胞子を含む病原体などの生物学的物質、および化学物質などの非生物学的物質の、迅速で正確な検出を提供する。細菌、胞子などの生物学的脅威、および爆発性または毒性化学物質などの化学的脅威を検出することができる。
【0057】
本発明の1つの側面において、上記などの識別実体を用いた分析物の空中検出は、センサーの被覆表面などの識別実体を有するセンサーを、気流に暴露することにより実施される。気流は、分析物を含んでいても含んでいなくてもよい。気流が分析物を含まない場合は、検出は期待されない。しかし、気流中に分析物が存在する場合は、分析物は識別実体に結合し、センサーの特性に影響を与える。変化した特性は、現在センサーに結合している分析物の存在を検出する変換器を用いて、検出することができる。特に、変換器機構は、光学、周波数、キャパシタンス、電気導電性、曲げモード、または静的モードのカンチレバーを介して、操作することができる。変換器機構は、センサーの特性の変化を、分析物の識別抗体への結合の結果として決定することができる。その結果、変化した特性(すなわち、寸法、周波数、質量、キャパシタンス、電気導電性、曲げモード等)が検出および定量化される。一旦定量化されると、識別実体に結合した分析物の量は、当分野に知られた計算手段、例えばコンピュータ、組み込み型プロセッサまたはデジタルもしくはアナログ回路などを用いて、決定することができる。かかる変換器機構の1つは周波数であり、ここでセンサーの機械的共振は、分析物がセンサーの識別表面に結合すると変化する。周波数変換を用いた態様の例を下に示す。しかし、他の変換機構も、上に記したように可能である。
【0058】
空中浮遊分析物の検出用の周波数変換の1つの態様において、圧電励振ミリメートルサイズカンチレバー(PEMC)センサーは、その高い感度により、空中浮遊種の検出に有用であることが、本発明者らにより見出された。例えば抗体またはDNA分子などの認識実体を用いて調製したPEMC表面は、病原体、タンパク質または生体分子であってよい標的分析物に応答する。かかる事象はカンチレバーの質量変化を引き起こし、これは共振周波数の変化として現れ、適切な分析器によりモニタリング可能である。好適な分析器は、ロックイン増幅器、インピーダンスアナライザー、ネットワークアナライザーまたは発振回路を含んでよい。
【0059】
本出願において、空中浮遊病原体の検出のための技術が記載される。1つの側面は、標的有機体または分子を、空気中で、識別分子を含むPEMCセンサーに接触させて、標的有機体または分子の存在を検知する方法を含む。本発明の1つの利点は、これが、液体媒体中の標的有機体または分子を検出用に収集することなく、実施できることである。伝統的なアプローチでは、センサーを液体環境中に配置する。発振表面などの動的な検出表面は、望ましくない粒子状汚染物質の付着に抵抗することが知られている。PEMCセンサーは、気体流と接触している間振動しているため、化学結合付着のみが生じることができ、これによって、気流試料中の気体が運ぶ粒子状汚染物質による擬陽性を減少させるか、または取り除く。PEMCセンサーが、その動作によって検出における汚染物質の除外に特異性を提供できるため、この原理は本発明の利点となる。
【0060】
本発明の1つの態様において、低速度流域において流れる気流に対して、センサー表面の位置および/また向きを特定する。好ましくは、約0.01〜約30m/sの気流速度を検出に用いる。低速度流域は、標的種と結合用のセンサー表面の間に、増加した接触時間を提供する。標的種とセンサー表面の間の接触時間は、気流に相対的なセンサー表面の特定の位置および向きによっても、増大させることができる。好ましくは、センサー表面は気流に実質的に垂直に配置するが、ただし他の向きもまた可能である。胞子のセンサー上の抗原への結合親和性は、局所湿度に依存する可能性がある。湿度を10〜95%の範囲に維持することで十分な結合を提供し、95%の値で、優れた結合親和性を提供する。結合は0.01〜30m/sの気流速度範囲で観察されるが、この範囲の下限はより高い結合反応速度を示す。幾つかの態様においては、0.01〜10m/sの気流速度が許容可能な速度であった。
【0061】
本発明の方法は、空気1リットル当たり胞子40個という低い濃度での炭疽菌胞子を、液体またはゲルマトリックスベースの試料を調製する必要なしに直接測定することにより、検出することが実証された。
【0062】
図19A〜19Gは、本発明の方法において用いることができる、種々の圧電カンチレバーセンサーの態様を示す。本出願における図は、別に指示がない限り正確な縮尺ではなく、図は概念を表すことを指摘する。図19A〜19Gにおいて、各センサーは、圧電層14(Pと表示)、接着層18(圧電層と非圧電層の重なり部分の間に位置する)、および先端として伸びている部分を含む非圧電層16(NPと表示)から構成される。ベース20には、圧電層14が取り付けられる。ベース20は、一般に電極(図示されず)またはいくつかの他の類似の手段を、圧電層14への連結と共に有するが、ただし、電極が圧電層14に連結していれば、電極はベース20に連結する必要はない。電極は圧電層14の任意の位置に配置することができる。また、金、SiO2、受容体材料を固定化できる材料、および/または化学的センシングまたはバイオセンシングで用いるのに適した吸収材料で作られた結合パッドも存在してよい。当業者は、図19A〜19Gに記載されたデザインは可能な形状の一部に過ぎないことを理解する。したがって、これらのデザインの変形は本出願の範囲内である。例えば、センサーの非圧電部は、1つまたは多くの離散数において、圧電層の全幅またはその一部にわたって、圧電層に取り付けられてよい。
【0063】
カンチレバーまたはビーム(単純または複合)センサーは、PZT層のAC電気的励振により機械的に振動される。励振周波数が機械的共振周波数またはその高次モードに一致する場合、振動の大きさ(平衡からの偏向)は、それより低いかまたは高い周波数におけるよりも大きくなる。したがって、共振において、PZTは、非共振周波数におけるレベルより高い応力レベルを経験する。PZTの応力レベルはその長さに沿って変化し、モードの形状に依存する。モードの形状はまた、カンチレバーの曲げ係数にも依存する。例えば図19Aを参照すると、R部での曲げ係数は、S部での曲げ係数よりも大幅に大きい。励振電極はんだ点の位置が、高い応力の位置またはこれに近い位置であることは、これが電気インピーダンスによる測定においてより大きい信号を与えるために有利である。自由端カンチレバーまたはビームセンサーの感度は、高い共振周波数においてより高い。図19A〜19Gおよび図35〜46に描かれた種々の例示の構造は、60kHz〜6MHzの範囲において基本高次共振モードを実現するよう設計されたものである。離散的な非圧電層の位置は、一定の高次モードが強化され、強度において非曲げモードが低下するように、設計することができる。
【0064】
圧電層14は、チタン酸ジルコン酸鉛、マグネシウムニオブ酸鉛−チタン酸鉛固溶体、チタン酸ストロンチウム鉛、石英シリカ、圧電セラミックチタン酸ジルコン酸鉛(PZT)または圧電セラミック−ポリマー1−3繊維複合材から構成することができる。非圧電層16は、セラミック、金属、ポリマーならびに1種または2種以上のセラミック、金属およびポリマーの複合材から、例えば二酸化ケイ素、銅、ステンレス鋼、およびチタンから、構成することができる。非圧電層は、従来の圧電カンチレバーの非圧電層を構成するために用いられる任意の既知の材料を用いて、構成することができる。電極は、任意の好適な従来の電極であってよい。1つの態様において、電極は、種々の圧電カンチレバーセンサーの暴露環境に基づき、絶縁されても、絶縁されていなくてもよい。
【0065】
検出は、装置の発振(すなわち共振周波数)を測定し、測定した発振(共振周波数)をベースライン発振(共振周波数)と比較して、周波数シフトを決定することにより達成される。決定された周波数シフトは次に、センサーの圧電層または非圧電層の1つに溶着された識別実体に付着した分析物の存在を決定するために用いる。圧電層、非圧電層および識別実体の組み合わせはカンチレバーを構成し、これは、圧電層に取り付けられた電極によって励振されると振動する。
【0066】
本発明の1つの側面は、表面に直接または間接的に結合できる任意の分析物を測定するための、装置および方法である。分析物の結合は、質量変化または剛性変化のどちらかまたは両方を引き起こす。これらの変化は、共振周波数の変化として測定することができ、適切な分析装置、例えばロックイン増幅器、インピーダンスアナライザー、ネットワークアナライザーまたは発振回路などにより、モニタリング可能である。本発明の態様は、圧電カンチレバーの新規な形状デザインを含む。従来の圧電カンチレバーは、圧電層の全表面を非圧電層に取り付けることにより製造される。いくつかの従来の圧電カンチレバーにおいては、圧電層は1つの端で固定され、そのため圧電材料が励振されると、非圧電層が曲がって圧電材料に生じたひずみを適合させる。励振周波数が下にある機械構造の固有周波数に等しい場合、共振が起こる。この型の圧電カンチレバーセンサーは、ミリメートルサイズで約100kHzより低い周波数における動作に優れている。より高い周波数は、カンチレバーセンサーを非常に短く(1mm未満)することによってのみ、可能である。
【0067】
従来の圧電カンチレバーの他の種類は、圧電材料が1つの端で固定されていないものを含む。これはいわゆる「無固定圧電カンチレバー」である。無固定圧電カンチレバーは、100kHzを超える値においてその第1曲げモード共振を示し、一方従来の固定カンチレバーは、2〜60kHzにおいてその第1曲げモード共振を示す。第2曲げモード共振は一般に200kHzの範囲にあり、より高いモードは400kHz、800kHzおよび潜在的にはさらに高い周波数にも存在する。
【0068】
10より高いQ値を示す任意のモードは、実用上便利である。Q値は、共振ピーク周波数の、ピーク高さの中点における共振ピーク幅に対する比率である。しかし、高いQ値を示す全てのモードが、感度の高い検出を提供するわけではない。空気と水、および空気と真空の間の共振周波数の差は、感度の測度を与えるが、これは密度の差が共振周波数における周波数シフトを引き起こすからである。多くの圧電カンチレバーセンサーにおいて、空気から真空へと媒体を変化させると、センサーの個別の形状により、4〜25kHzの共振周波数変化を引き起こす。
【0069】
圧電層と非圧電層の相対的な長さおよび幅が感度を決定し、またセンサーが提供する周波数スペクトルのピークの形状も決定する。これは、本明細書に図として含まれている種々の圧電カンチレバーセンサーのスペクトルから見ることができる。
【0070】
本発明は、圧電カンチレバー表面に結合する、極小濃度の分析物の検出も可能とする。実施例には、病原体およびタンパク質の検出が、空気中低い濃度において示されている。さらに、PEMC表面の有機または無機の官能基に結合する、任意の分析物が検出可能である。したがって、化学的および生物学的剤の両方が、PEMCに基づくデバイスを用いて、空中環境中で検出可能である。
【0071】
本発明のカンチレバーについては種々の潜在的用途があり、例えば、炭疽菌などのバイオテロリズム剤の検出、空中浮遊病原体の検出、例えばトリニトロトルエン、ジニトロトルエンの存在などの爆発性マーカーの検出、および空中浮遊毒素の検出などである。本発明の圧電カンチレバーはまた、ピコグラムレベルでの生物学的実体の検出および、タンパク質−タンパク質相互作用の、静的および動的両方の状態での検出にも用いることができる。
【0072】
使用用途の例として、ある種の化学的コーティングに高い親和性を有する非生物学的実体が存在し、したがってPEMCまたはPEMCBセンサーなどの空中浮遊分析物センサーを、毒性または爆発性化学物質の検出などの非生物学的用途にも用いることができる。例えば、識別実体としてaSXFA−[ポリ(1−(4−ヒドロキシ−4−トリフルオロメチル−5,5,5−トリフルオロ)ペント−1−エニル)メチルシロキサン]のポリマーコーティングを用いて、2,4−ジニトロトルエン(DNT)を検出することができる。また、識別実体として分子的にインプリントされたポリマー(MIP)を用いて、トリニトロトルエン(TNT)などの爆発物および、2,4−ジリニトロトルエン(2,4−DNT)などの爆発痕跡物を検出することができる。
【0073】
図19Aは、無固定オーバーハング型の圧電カンチレバーセンサー(oPEMC)の態様710を示す。このセンサー710を「無固定」と呼ぶのは、非圧電層16がベースに取り付けられていないからである。このセンサーを「オーバーハング型」と呼ぶのは、非圧電層16が圧電層14の遠位端を越えて伸び、非圧電層16のオーバーハング部分を作り出しているからであり、この非圧電層16は圧電層からオーバーラップ領域18により隔てられている。ベース20は、圧電層14の近接端を保持する役割を果たす。
【0074】
本発明は、全ての好適な寸法を有するセンサーを包含する。例えば、圧電層14、非圧電層16およびオーバーラップ領域18のそれぞれは、0.1〜10mmの長さの範囲であってよい。圧電層14および非圧電層16の幅は、上記の長さに対して、0.1mm〜4mmの範囲であってよい。圧電層14の幅は、非圧電層16の幅と異なっていてもよい。
【0075】
典型的には、オーバーハング型圧電カンチレバーセンサー710の非圧電層16は、長さが約0.1mm〜約10.0mmの間、幅が約0.1mm〜約4.0mmの間である。圧電層14は、長さが約0.1mm〜約10.0mmの間、または幅が約0.25mm〜約4.0mmの間であってよい。層18は、層14と層16の間の重なりに相当し、オーバーハング型圧電カンチレバーセンサーの特定の構造に依存して、長さが約0.1mm〜約10mmの間、または長さが約0.1mm〜約5.0mmの間であってよい。
【0076】
オーバーハング型圧電カンチレバーセンサー710の幅は、約0.1mm〜約4.0mmの間であってよい。圧電カンチレバー710の厚さは、約0.1mm〜約1.0mmの間であってよい。図47の表1は、図19Aに相当するオーバーハング型PEMCデバイスの幾つかの寸法の例を示す。図47の表1において、長さの寸法a、b、およびcは図19Aの記号に対応する。
【0077】
本発明のオーバーハング型圧電カンチレバーセンサー710は、一般に、10〜120kHzにおいて第1曲げモード共振周波数モードピークを示し、120〜250kHzにおいて第2曲げモード共振周波数モードピークを示す。
【0078】
図19B〜19Fは、本発明による圧電励振カンチレバービームセンサーの種々の態様を示し、これらは成功してセンシング応答を提供することが実証されたものである。カンチレバービームセンサーは、図19Aのオーバーハング型センサーと全て同じ要素を含み、それに加えて第2ベース50も含み、この第2ベース50には、圧電層14と非圧電層16のうちの少なくとも1つが固定される。図19B〜19Dにおいて、非圧電層16は両方のベース(20、50)に取り付けられて、「ビーム」を形成する。図19Eにおいては、ビームは、圧電層14をベース20に取り付け、非圧電層16を接着層18を介して圧電層14に取り付け、および非圧電層16をベース50に取り付けて形成される。図19Fの構成717において、ビームは、圧電層14を両方のベース(20、50)に取り付けて形成される。
【0079】
圧電層および非圧電層の2つの端の固定は、3mmのガラスロッドまたはタングステンロッドを用いて行った。支持ロッドの曲げ係数がセンサーのビームよりはるかに大きい限り、良好なピーク形状が観察される。固定のための他の好適な方法もまた、用いることができる。
【0080】
図19B〜19Fのカンチレバービームセンサーのデザインは、直感的にはわかりにくく、何故ならば、当業者の期待としては、ビームの両端の取り付けは、ベース(20、50)への取り付けの結果としてカンチレバーの変位が制限されるために、劣化した応答を提供する、ということだからである。言い換えれば、従来のカンチレバーでは、カンチレバーの1つの端は自由端であり、すなわちベースに取り付けられず、これによりセンサーの応答を増加させるために、センシングの間のカンチレバーのより大きい変位を可能とする。
【0081】
図19Gは、浮動先端PEMC(ftPEMC)センサーと呼ばれる、図19Aのオーバーハング型形状についての代替の態様719を示す。図19B〜19Fのセンサーと異なり、図19Gの構造は1つのベース20のみの取り付けを有する。この構成および他の構成の性能結果について、以下にさらに記載する。
【0082】
図19B〜19Fの2つのベース(20、50)の「ビーム」構造に戻ると、圧電層での応力測定が、圧電層の変位の測定よりも、カンチレバーの両端がベース(20、50)に固定されたカンチレバー「ビーム」センサーの使用を許容することが見出された。さらに、本発明のカンチレバービームセンサーは、より高い基本モード(>100kHz)、流動条件のもとでの安定で頑健な性能および、低試料濃度の検出を可能とする優れた質量変化感度を提供する。
【0083】
本発明の1つの利点は、上記の図19A〜19Gのデザインが機械的に頑健であり、流動条件に対して性能の最小の劣化で耐えることである。第2の利点は、基本周波数が、カンチレバー構造の類似寸法のセンサーより3〜4倍高いことである。
【0084】
以下に記載する図20〜31は、本発明によるオーバーハング型圧電励振ミリメートルサイズカンチレバー(oPEMC)センサーの異なる態様を用いて行った種々の実験の結果を示す。図47の表1は、オーバーハング型PEMC(oPEMC)デバイスの寸法および共振周波数を示す。図2は、例えば図19Aに示すものなどのオーバーハング型圧電カンチレバーセンサーの第1の態様の、空気中で作動させた場合の代表的な共振スペクトルを示す(図47表1のoPEMC#1参照)。図2は、励振電圧100mVにおける、位相角対励振周波数のプロットを示す。第1共振周波数モードは一般に150〜200kHzで起こり、第2共振周波数モードは250〜300kHzで起こった。共振スペクトルは、高次特性ピークを、約980kHz、2.90MHzおよび4.60MHzにおいて、幅2mmの複合PZTカンチレバーについて示す。オーバーハングなしの、類似の無固定圧電カンチレバー構造と比べて、5MHzまでのベースラインはわずかに安定性が高く、観察された共振周波数の多くはより高かった。さらに、980kHzの特性ピークの性質係数(Q)は、オーバーハング型の態様について3倍高く、4.60MHzの特性ピークの性質係数(Q)は、2倍の係数で低かった。
【0085】
図21は、図19Aに示すオーバーハング型圧電カンチレバーセンサーの第2の態様の、空気中で作動させた場合の代表的な共振スペクトルを示す(図47表1のoPEMC#2参照)。図21は、励振電圧100mVにおける、位相角対励振周波数のプロットを示す。第1共振周波数モードは一般に150〜200kHzで起こり、第2共振周波数モードは250〜300kHzで起こった。このオーバーハング型圧電カンチレバーセンサーの第2の態様の共振スペクトルは、高次特性ピークを、約980kHz、2.90MHzおよび4.60MHzにおいて、幅2mmの複合PZTカンチレバーについて示す。オーバーハング部、すなわちオーバーハング型圧電カンチレバーセンサーのこの態様の図19Aの部分16は、oPEMC#1のオーバーハング部より3倍大きく、これは、第1共振周波数モードおよび850〜900kHzで起こった共振周波数モードにいくらかの減衰を引き起こした可能性がある。
【0086】
図22は、オーバーハング型圧電カンチレバーセンサーの第3の態様の、空気中で作動させた場合の共振スペクトルを示す(図47表1のoPEMC#3参照)。図22は、励振電圧100mVにおける、位相角対励振周波数のプロットを示す。第1共振周波数モードは一般に150〜200kHzで起こり、明白な第2共振周波数モードはなかった。オーバーハング型圧電カンチレバーセンサーのこの態様の共振スペクトルは、高次特性ピークを、約1.81MHzおよび1.95MHzにおいて、幅1mmの複合PZTカンチレバーについて示す。オーバーハングなしの無固定の構造と比べると、オーバーハング型構造の1.81MHzでの共振ピークは明示されるが、2.5MHzを超える他の全てのピークは減衰する。
【0087】
図23は、本発明によるオーバーハング型圧電カンチレバーの第4の態様の、共振周波数スペクトルを示す(図47表1のoPEMC#4参照)。図23の共振周波数スペクトルは、セラミックPZTで構成された圧電層の、幅1mmのオーバーハング型カンチレバーを用いて得た。スペクトルは、空気中で100mV信号を用いてカンチレバーを励振して得た。特性ピークは、250kHz、650kHz、850kHz、1.65MHzおよび4.65MHzにおいて得られた。
【0088】
図24は、本発明によるオーバーハング型圧電カンチレバーの第5の態様の、共振周波数スペクトルを示す(図47表1のoPEMC#5参照)。図24の共振周波数スペクトルは、セラミックPZTで構成された圧電層の、幅1mmのオーバーハング型カンチレバーを用いて得た。カンチレバーの部分(a)を短くすることにより、リストされた全周波数に対して減衰したピークを得た。スペクトルは、空気中で100mVの信号用いてカンチレバーを励振して得た。特性ピークは、200kHz、1.0MHz、1.55MHz、1.90MHzおよび4.50MHzにおいて得られた。さらに、この態様の寸法で、オーバーハング型圧電カンチレバーにより1.00MHzにおいて感度の高い共振モードが得られた。
【0089】
1つの態様において、圧電カンチレバーセンサーは、石英シリカおよび、圧電セラミックチタン酸ジルコン酸鉛(PZT)または圧電セラミック−ポリマー1−3繊維複合材のどちらかから、製造した。1つの態様において、非圧電層は従来の材料から、例えばセラミック、金属、ポリマーならびに1種または2種以上のセラミック、金属およびポリマーの複合材から、例えば二酸化ケイ素、銅、ステンレス鋼、およびチタンなどから構成した。
【0090】
図48の表2は、図47の表1にリストされた、異なる圧電カンチレバーセンサーに対する対応する共振ピークの品質係数(Q)を示す。品質係数は、共振ピーク周波数の、ピーク高さの中点におけるピーク幅に対する比率として決定した。そのため、品質係数は共振ピークの先鋭度の測度である。上記の実験において、オーバーハング型圧電カンチレバーセンサーの品質係数は、センサーが真空中から空気流環境までの異なる環境中に置かれた場合にも、大きく減少しないことが示された。
【0091】
オーバーハング型圧電カンチレバーセンサーのQ値は、ピークが検出されるそれぞれの周波数モードに依存して、一般に10〜70の範囲であることが観察される。オーバーハング型圧電カンチレバーセンサーが真空中、空気中、および流れを含む粘性の環境中で用いられる場合、一般にそのQ値は20%〜35%を超えて減少しない。
【0092】
ここで図19B〜19Fの構成の性能を考察する。図25は、図19Bの固定圧電励振ミリメートルサイズカンチレバービーム(aPEMCB)センサー711の、空気中で100mVで励振された場合の、位相角対励振周波数のプロット、すなわち代表的な共振スペクトルを示す。第1のピークは基本共振モードであり、これは一般に200〜300kHzで起こった。第2のピークは第2共振モードであり、これは通常、700kHz〜1MHzの周波数範囲である。aPEMCB共振スペクトルは、電極をインピーダンスアナライザ(Agilent, HP4192A)に接続することにより測定した;該インピーダンスアナライザは、励振電圧100mVで目的の周波数範囲におけるインピーダンス、位相角および振幅比の連続測定のために、パーソナルコンピュータにインターフェースを介して接続されたものである。
【0093】
図26は、図19Cの浮動圧電励振ミリメートルサイズカンチレバービーム(fPEMCB#1)センサー712の、空気中で100mVで励振された場合の、位相角対励振周波数のプロットを用いた共振特性を示す。一般に、基本共振モードは200〜250kHzで起こり、第2モードの周波数は800kHz〜1MHzで起こった。各共振ピークに対する品質係数を、図50の表4に挙げる。
【0094】
図27は、図19Dの固定バイモルフ圧電励振ミリメートルサイズカンチレバービーム(abPEMCB#1)センサー713の、空気中で100mVの励振電圧の場合の、位相角対励振周波数のプロットを用いた、代表的な共振スペクトルを示す。基本共振周波数は200kHzで起こり、第2モードは700kHzで起こった。全センサーの構造種類についての物理的寸法および品質係数は、それぞれ表3および表4に示される。
【0095】
図28は、図19Eのオーバーハング型ビームPEMCB(oPEMCB#1)センサー715の、空気中で100mVの電圧で励振された場合の、共振スペクトルを示す。図19B、19C、19Dおよび19Eの固定、浮動、および固体バイモルフおよびオーバーハング型のPEMCセンサーの、寸法および共振周波数はそれぞれ、図49の表3に一覧表示されている。ここで、PEMCBセンサーの形状を変化させることにより、共振周波数のピーク位置は特定の要求に対して調節できることがわかる。したがって、圧電層14および非圧電層16の位置、およびこれらがビームベース20、50に固定か無固定か、およびどの材料でビームを構成するかの選択により、生物学的および化学的検出の決定のための広い範囲の共振周波数の選択が可能となる。
【0096】
図49の表3は、図25〜28で用いたPEMCBセンサーのmm単位で表示した物理的寸法および、空気中での基本モードの共振周波数を示す。PZTおよびガラスの長さは、それぞれ図19B〜19Fにおける層14および16の寸法である。幅および厚さは、各層の寸法である。PEMCBセンサーは、圧電セラミックチタン酸ジルコン酸鉛(PZT)および石英シリカから製造された。
【0097】
ここに記載されたベース2つのカンチレバービームデバイスからの、異なる形状を有する別の種類のPEMCセンサーを図19Gに示し、これも製造して試験した。新しい形状719である、浮動先端PEMCセンサー(ftPEMC)は、厚さ127μmのPZT単シートおよび厚さ180μmの石英カバー四角形を用いて製造した。用いたPZT層は、図19Aのベースセンサープラットフォームに用いたものと同じである。カンチレバーの自由端は、1.50±0.05×1±0.05mm2(長さ×幅)のガラス層を、4±0.05×1±0.05mm2(長さ×幅)のPZT層の1端に、非導電性接着剤で結合して設計した。もう1つの端においては、長さ1.70±0.05mmのPZT層をガラス管内にエポキシ樹脂接着した。その結果、カンチレバーの自由端は、0.8mmの暴露されたPZT層を有する。上部および下部電極は、長さ1.7mmのPZT層上に、エポキシ接着の前に、BNCカプラーにはんだ付けされた30ゲージの銅製ワイヤを用いて作製した。カンチレバーの自由端のPZT層は、厚さ8μmのポリウレタン層で絶縁した。1.50±0.05×1±0.05mm2のガラス層は、抗体固定化および抗原検出用の表面を提供する。
【0098】
上記の任意のPEMCまたはPEMCBデバイスは、抗体またはDNAなどの識別実体でPEMCまたはPEMCBデバイスが被覆された場合には、センサーを形成することができる。適切な被覆により、得られるセンサーの被覆は空中浮遊病原体、空中浮遊タンパク質または空中浮遊生物学的剤などの標的分析物を引き寄せ、これに結合する。1つの態様において、空中浮遊炭疽菌(BA)胞子の直接検出を、固定化BA抗原で被覆したミリメートルサイズPZTカンチレバーセンサー(PEMC)を用いて検討した。BAの被覆PEMCセンサーへの付着は、付加されたBAの質量によるPEMCデバイスでの周波数変化として検出されるが、これは、付着したBAが質量に影響を及ぼし、したがってカンチレバーデバイスの機械的共振に影響するためである。
【0099】
1つの態様において、実験装置は、PEMCセンサーをそのガラス表面を気流に向けて垂直に浮遊させた、水平管を含む。石英表面はシラニル化され(silanylated)、続いて病原体BAに特異的なウサギ抗BAが固定化され、空気中に42〜278,000胞子/Lを含む流れる気流(11cm/s)に暴露された。BAは、軸流噴霧器を用いてセンサーの上流に導入した。噴霧器中のBA溶液の濃度は、コールターカウンターMultisizer IIを用いて測定した。センサーは、2×5mmのホウケイ酸ガラスを0.5mmオフセットでラミネートした2×5mmのPZTから製造し、非導電性エポキシベースに固定した。
【0100】
図29Aは、空中浮遊炭疽菌(BA)をPEMC型センサーに流して空中浮遊BAを検出するのに用いる装置100を示す。湿度ゼロの状態に調整した供給空気110(A0)は、2つの流れに分割される。1つの流れは空気弁110(A1)を用いて、噴霧器121に脱イオン化した水中の既知の濃度のBAを供給する。噴霧器121は、約5μmの液体粒子を生成する。低ずり噴霧器を用いて、BA胞子が噴霧器中を流れる際の損傷を防ぐ。液体粒子は、2”パイプを通して約1〜200lpmに調節可能な調節式空気弁115(A2)から作り出される空気により、運ばれる。図29Aの構成において、2つの流れはミキサー123で混合され、エアロゾル化されたBAを1m/sの速度で運ぶが、これより高い速度も可能である。PEMCセンサーは、図29Bに示すように、「T型」暴露管アセンブリ125に垂直の様式で挿入され、インピーダンスアナライザ131および共振周波数データを30秒毎に収集するパーソナルコンピュータに、インターフェイスを介して接続される。流れるバイオエアロゾルの湿度および温度は、連続してモニタリングする。周期的に、出口の流れを市販のSASS2000空気捕集装置140を用いてサンプリングし、該装置は5mlの液体試料を提供する。これらの試料は、別の装置のPEMCセンサーを用いて分析するか、またはその粒子サイズと分布を、コールターカウンターを用いて決定する。SASS2000空気捕集装置は、RS−232インターフェイスとパーソナルコンピュータ150を用いて、モニタリングする。
【0101】
図29Bのフローセル125は、気体流入力部1251、気流ボディ部1252、排気開口部1253、およびセンサー搭載部1253を含む。センサー搭載部の中のセンサー1254は、垂直方向に調節可能に配置することができ、ボディ1252を通る気流中へのセンサーの浸透深さが調節される。1つの態様において、センサーはカンチレバーセンサーの識別実体を気流方向に直角に暴露するよう配置され、識別実体の、気流中の要素への暴露を最大化する。
【0102】
図29Aの構成を用いて、センサーの定常状態周波数応答を、初めに湿った空気(RH=85±3%およびT=23±0.3℃)を2.4lpmの流速で流すことにより、実現した。噴霧器の充填は4mL中1000万個の胞子であり、これを15分間噴霧すると、278,000胞子/空気1Lの気相濃度を生成する。PZTカンチレバーの周波数は、その質量および温度、および周辺気体の流体力学特性の関数である。空中浮遊BAに暴露されると、共振周波数は、被覆されたカンチレバーデバイスへの胞子の付着により700Hzに減少した。検出後にセンサーをPBSに浸し、付着したBAを低pH緩衝液を用いて解放することにより、BA付着を確認した。胞子の解放から得られる周波数変化は350kHzであった。温度および湿度効果による周波数変化は、1℃当たり60Hz、および相対湿度(RH)1%当たり2Hzであった。
【0103】
PEMCセンサーは、検出に用いる構造および振動モード依存して、10フェムトグラムの感度を有することができる。図30Aの結果については、2つのセンサーを用いた。センサー1は、278,000胞子/空気1L(湿度95%、24C)の濃度で流れるBA胞子に暴露された場合に、760Hzの応答を与えた。同じ胞子濃度を用いて、センサー2はほとんど同じ応答である760Hzシフトを与えた。図30Aはまた、同じモードを検出に用いた場合に、類似構造の異なるセンサーによる別のランの間の、優れた再現性を示す。このように、BA胞子の定量的および再現可能な、成功した検出が観察された。
【0104】
図30Bは、4つのセンサーを暴露した結果を示す。センサー1(1006)およびセンサー2(1008)は、BA胞子を検出する識別実体を用いて調製した。対照センサー1002および1004は、同じ識別実体を用いて同様に調製した。図30Bは、センサー1およびセンサー2の間の、1Lの気体当たり278,000胞子の環境中で胞子を検出する場合の、結果の整合性を示す。センサープロット1002は、0.2〜0.6μmサイズのケイ酸アルミニウム粒子である無機粒子の、対照の注入に対するセンサー応答を示す。センサープロット1002は、予想されたように、実質的な応答がないことを示す。センサープロット1004は、清浄な空気環境に対するセンサー応答を示す。予想されたように、実質的な応答はないことを指摘する。このことは、PEMC/PEMCBセンサーを用いる分析物の検出は、用いる識別実体に非常に特異的であり、したがってそのように構成されたセンサーは、非標的物質に対して感度が低いことを証明する。
【0105】
PEMCセンサーは、質量、温度および流体密度の変化に応答する。システムの温度、湿度(質量および密度効果)および圧力(密度)の変動は、病原体の検出をマスクして隠し得る。PEMCセンサーのデザインは、これらのマスク効果を最小化する。PEMCデバイスの周波数は、胞子が噴霧器からセンサーまで移動する時間の間に応答したことを指摘する。BAを検出するための時間は、2分のオーダーである。
【0106】
上に述べたように、PEMCセンサーへのBA付着の検出の確認は、低pH緩衝液中での解放により行った。顕微鏡による直接観察も確認に用いた。低pH緩衝液による確認において、付着の解放に対する比率2:1は、空気対液体質量変化に対する他の報告と整合する。BAのエアロゾル化の確認は、噴霧器が供給する粒子サイズの解析および、図29Aの構成において空気捕集装置(SASS200)により捕捉された排気の解析を介して行った。SASS2000は、注入された空中浮遊BAの約30%を捕捉する。検出の確認結果は、図31に示す。
【0107】
図30Aに示す実験を行った後、1Lの空気試料当たり278,000胞子に暴露されたセンサーを、解放緩衝液(pH2.2)に挿入し、共振周波数を測定した。このpHにおいて、抗原はセンサー表面から解放され、質量の減少は共振周波数を増加させ、周波数の減少が確かにBAの付着によるものであることを確認した。この確認を図31に示す。
【0108】
BA付着のさらなる確認は、顕微鏡での直接検査により行った。図32の走査型電子顕微鏡写真は、空中浮遊炭疽菌の検出実験の1つにおいて用いた、壊されたカンチレバーを示す。センサーは、SEMの台座への搭載を可能とするために壊され、次に顕微鏡分析に用いられた。図32の上の図は、下の図に示されたセンサー表面の領域内での検出に用いられた炭疽菌胞子の存在を示す。これらの顕微鏡写真は、炭疽菌抗原が、センサー表面上に化学的に固定化された抗体に結合することを示す。
【0109】
先に指摘したように、PEMCセンサーは、気体流と接触している間振動しており、化学的結合による付着のみが起こり得て、これにより、気流試料中の気体が運ぶ粒子による汚染からの擬陽性を低減するかまたは取り除く。気相実験を、0.2〜6.0ミクロンの粘土粒子を不活性の汚染物として用いて行った。汚染物への暴露からは、センサー出力に何の変化も観察されなかった。これはまた、不活性の汚染物はPEMC表面にその動作中付着しないことも確認する。
【0110】
したがって、本発明のセンサーが、バイオテロ剤の検出、空中浮遊病原体の検出、DNTなどのTNTのマーカーの検出、空中浮遊毒素の検出、および好適に調製されたPEMCまたはPEMCB表面に結合する任意の他の標的分析物の検出に用いることができることが、例を用いて理解され示される。本発明のセンサーはまた、複数のセンサーが1つのデバイスに、複数の異なる分析物を同時に検出するために配置される、センサーアレイに実装することもできる。この方式で、本発明のセンサーは、例えば、気体中の未知の種を同定するため、または気体中の複数の異なる分析物の存在を示すために、用いることができる。
【0111】
上に指摘したように、検出は湿度に影響される。特に、非常に低い湿度は結合親和性に悪影響を及ぼす。したがって、空中浮遊分析物センサーに付随して給湿を含むことが有利である。図33は、図29Bの空中センサーを用いた構成を示す。この態様において、気体ポンプ305は空気注入口を有し、チャンバー、容器、または部屋などの空気試料から空気を取り込み、取込み空気を給湿機310にポンプ注入する。給湿機310は、ポンプ注入された空気にある量の湿度を加えて、フローセル125のPEMCまたはPEMCBセンサーが、取り込み空気に含まれる標的分析物と良好に反応するようにする。PEMC/PEMCBフローセル125は次に、空気315を安全な場所に排気する。フローセル125のセンサーは、インピーダンスアナライザ131およびフローセルから共振周波数データを収集するパーソナルコンピュータ135を用いて測定される。図33は、フローセル内のPEMC/PEMCBセンサーの、分析物の空中検出のための簡易な適用である。
【0112】
図34は、本発明の側面を含む方法のフロー図を示す。方法は、空中浮遊分析物の、PEMC型センサー(PEMCおよびPEMCB型を含む)を用いた検出に関する。方法は、PEMC型センサーをステップ2120において提供することから開始される。これらのセンサーは、図19A〜19Gに示す任意の種類および変形を含むことができる。これらの種類は、図19Aおよび19Gに示す1つのベースのカンチレバー型、図19B〜19Dに示す非圧電ビームを有する2つのベースのビーム型センサー、図19Fに示す圧電ビームを有するビーム型センサー、および図19Eに示す重なった層構造のものを含む。
【0113】
次に、エアロゾル化された標的分析物を、ステップ2122において、気流中でセンサーに渡す。ここで、分析物を引き寄せる識別実体が、分析物を有する気流に直角に配置されているのが好ましい。気流への暴露により、識別実体は標的分析物を捕捉することができる。次に、PEMCセンサーを、ステップ2124で電極を介して励起して発振させる。カンチレバーアセンブリまたはビームアセンブリの発振周波数は、識別実体が収集した分析物を含む、アセンブリの質量に依存する。センサーの発振周波数(すなわちカンチレバーアセンブリの共振周波数)は、ステップ2126で測定する。測定されたカンチレバーアセンブリの発振周波数は、次にステップ2128で、カンチレバーアセンブリの固有(共振)ベースライン周波数と比較する。かかる比較は、パーソナルコンピュータ、内蔵プロセッサ、アナログまたはデジタル回路を含む計算手段、または手計算により行うことができる。
【0114】
周波数シフトは、決定ステップ2130で検出する。周波数シフトがステップ2132でのように検出されない場合は、次に、識別実体上に分析物が存在しないとの決定がなされる。これは、気流試料が純粋であるか、または識別実体が気流中のいかなる分析物とも適合しない場合に起こる。周波数シフトが検出された場合は、ステップ2134において標的分析物が検出されたことが決定される。さらに、分析物の具体的な量(すなわち、識別実体上に付着した分析物の質量)が、ステップ2136で決定される。このステップは、周波数シフトの大きさを調査し、この大きさを、PEMCセンサーの共振周波数を変化させるのに必要な分析物の質量と相関させることにより行う。分析物の液体ベースのサンプリングの場合に必要な、特別の調製は行われなかったことを指摘する。また、上記の方法には、液体ベースの分析物検出と比べて、特別の濃縮段階または濃縮段階は含まれない。
【0115】
分析物の検出において品質の対照またはさらなる精度を提供するために、図33には示されていないが、対照センサーと分析物を検出する測定センサーとの間で比較がなされる。例えば、対照センサーは、標的分析物に対する識別実体を有さないことを除いて、測定センサーと同一であるのが好ましい。測定センサーと同じ気流に暴露された場合、対照センサーの共振周波数変化は、測定センサーの共振周波数から区別でき、正確な結果を提供する。
【0116】
追加のセンサー構成
図35〜47の全ての構成は、気体または液体媒体中の分析物を検出するために用いることができるセンサーの構成に、図19A〜19Gの構成同様に有用である。したがって、図35〜47の構成の用途は、本明細書において、空中浮遊化学物質または生物製剤の検出のために記載されたものと同様である。図35〜47は、図19A〜19Gのものと、いくつかの特性を共有する。例えば指示されている場合には、ベース要素20が存在して、ここに圧電14(P)型の要素または非圧電16型の要素のどちらかが取り付けられる。接着層18は、P型層14をNP型層16から隔てる。図35〜47には、点30において圧電14型の要素の種々の位置に接続されて、カンチレバー構造またはビーム構造を励振させる、電極28が示される。図35〜47は、PEMCおよびPEMCBデバイスと共に実装可能な広い範囲の構成を示す。それらの各々の簡単な説明は以下である。
【0117】
図35は、NP部16がP部14と接触している、PEMCまたはPEMCBセンサーの構成を示す。NP層16(TNP)の厚さは、NP層14の長さに沿って可変であることができ、TNPは高感度センサーを支持するように設計できる。この構成において、NP層14のノッチ部の曲げ係数は、NP層14のより厚い部分のそれよりも小さい。PおよびNP層を含む自由端のカンチレバーアームのみが示されているが、図35の構成は、中心線A−Aについて鏡像の形に複製してもよい。図35のこの鏡像複製は、ビーム型(PEMCB)センサーの対称性を示す。図35〜47には中心線が描かれている幾つかの例があり、ここで、形状描写は、自由端カンチレバーまたはビーム型構造のセンサーのどちらかであることができる。さらに、電極ワイヤ28、および端子30の配置およびノッチの幅についての基本情報全ては、この構成および他の全ての構成に適用される。
【0118】
図36は、2層のNP16を示す:1つは上に、1つは下にあり、NP1の曲げ係数(EI)がNP2のそれと同じではない場合に、効果的に用いることができる。ここで、図36のNP1およびNP2の名称は、2つのNP層が形状および材質において異なってよいことを示す。例えば、NP1はNP2より小さいか、または異なる形状であることができる。またNP1はガラスで作ることができ、一方NP2はセラミックで作ることができる。図35の場合と同様に、中心線A−Aについての鏡像は、ビーム構造を生成する。この場合、距離Xは0以上であり、Pが鏡像のアンカーに連続的であるか、または2つに別れた部分であることを意味する。X>0の場合、Pの一方または両方の部分を励振できるが、しかし後者の場合は、2つの励振は同期することができる。図37は、2つの側面を除いて図36と同様の構成を示す。図37において、P1およびP2を有することは対称軸を作るため、NP1=NP2である。A−Aについての鏡像はビーム構造を作り出す。この場合、Xは0以上である。これは、Pが鏡像のアンカーについて連続的であるか、または、2つに別れた部分であることを意味する。X>0の場合、Pの一方または両方の部分を励振できるが、しかし後者の場合は、2つの励振は同期させるのが好ましい。
【0119】
図38は、NP16型材料の追加部分を除き、図19Aと同様の構成を示す。この構造の図19Aに対する利点は、共振周波数ピーク位置についてよりよい制御が実現でき、望ましくないモードの減衰に構成が効果的でありえることである。NP1(16)は、NP2(16)と、所望の特性に依存して、同じかまたは異なることができる。図38の自由端カンチレバー構造は、NP2の遠位端をベース要素に単純に固定することにより、ビーム構造に変換できる。また、図38でNP2と記された部分は単に、P型材料の部分から電極を取り除き(レーザー切断、化学エッチングなど)、P型材料の励振不能な部分を用いることにより作製できることも指摘する。
【0120】
図39は、NP1の追加を除き、図19Aと同様の構成を示す。ここでNP1は、P型層の代わりにベース20に結合している。この構成は改善された信号をもたらし、なぜならば、図19Aの構成とは異なり、Pの近接端には束縛がなく、その信号エネルギーの幾分かは散逸せず、そのためより大きな信号を発生するからである。別の言い方をすれば、図19Aからの信号エネルギーの幾分かは、近接端が束縛されているために失わる可能性がある。図39の構成は、図19Aのそれに対して改善を示す。図35〜37の構成におけると同様に、中心線A−Aについて鏡像を付加することにより、ビーム構造を作製することができる。
【0121】
図40は、PおよびNP領域を逆にしたものを付加し、P型の層14を付加したことを除いて、図19Fと同様の構成を示す。この構成は改善された信号をもたらすことができ、なぜならば、Pの近接端は、その信号エネルギーの幾分かが散逸しないように、束縛されていないからである。したがって、より大きな信号が生成される。図41は、NP1を加えたことを除き、図19Eと同様の構成を示す。この構成は改善された信号をもたらすことができ、なぜならば、Pの近接端は、その信号エネルギーの幾分かが散逸しないように、束縛されていないからである。したがって、より大きな信号が生成される。図42は、NP層の曲げ係数(EI)が長さLの関数として変化することを除き、図19Gと同様の構成を示す。このパラメータを変化させることにより、電極位置に集中する応力を増加させることによる、感度の強化が達成される。これを実現する1つの実際的な方法は、図43に示すように、NP層を複数の分離した部分から構成し、これらの部分は、空の空間または低係数の代替材料である隣接部分に沿って、その幅が異なることができる。ビーム構造は、図42または図43のどちらかにおいて、A−Aについて鏡像を加えることにより、作製される。
【0122】
図44は、上部NP層が、長さの関数として変化する曲げ係数(EI)と、長さの関数として変化する下部層を有すること除き、図36と同様の構成である。これは、図43の効果的な鏡像であるが、しかし、下部層は上部層と異なっており、共振構造を作っている。図44において、上部および下部層は、P層が図37に示すようにサンドイッチ構造である場合にのみ、同一であることができる。図45は、電極の点に応力を十分に集中させて、高感度の応答を生成する構成である。しかし、これはNP16の位置のために、さらに安定な応答を与える。ビーム構造は、A−A中心線について鏡像化することにより作製することができる。図46は、短縮したベース20のために、製造性について有用な構造である。しかし、これはより多くの望ましくない振動モードを提供する。ビーム構造は、A−A中心線について鏡像化することにより作製することができる。
【0123】
本発明の多くの特性および利点が、発明の構造および機能の詳細と共に前述の説明に示されているが、この開示は説明のみであり、特に、部品の形状、寸法および配置の事項における変更を、本発明の原理内で、添付のクレームが表現されている用語の広い一般的な意味により指示される全ての範囲まで、詳細にわたって作製できることが理解されるべきである。
【技術分野】
【0001】
関連出願の相互参照
本出願は、2007年1月23日出願の米国特許出願第11/625,919号、名称「Self-Exciting, Self-Sensing Piezoelectric Cantilever Sensor」の優先権を主張し、これは本明細書に参照としてその全体が組み込まれる。米国特許出願第11/625,919号は、2006年1月23日出願の米国特許仮出願第60/761,172号、名称「Piezoelectric Cantilever Sensors」および2006年7月11日出願の米国特許仮出願第60/807,020号、名称「Piezoelectric Cantilever Sensors」の優先権を主張する;これらはともに本明細書に参照としてその全体が組み込まれる。本出願はまた、2006年5月10日出願の米国特許仮出願第60/746,951号、名称「Detection of Airborne Pathogens Directly in Air」の優先権も主張し、これも本明細書に参照としてその全体が組み込まれる。
【0002】
技術分野
本技術分野は一般にセンサーに関し、さらに具体的には、圧電カンチレバーセンサーならびに、圧電カンチレバーセンサーを用いて分析物を検出および測定することに関する。
【背景技術】
【0003】
背景
カンチレバーセンサーは、センサーの寸法により、マイクロカンチレバーとマクロカンチレバーの大きく2種類に分類することができる。マイクロカンチレバーセンサーは、静的(曲げ)モードおよび動的(共振)モードの両方で用いることができる。静的モードにおいては、カンチレバーアームの変形を測定して、分析物(分析されている物質)が存在するかどうかを決定する。動的モードにおいては、共振周波数を測定して、分析物が存在するかどうかを決定する。マクロカンチレバーセンサーは一般に静的モードでは用いず、これはカンチレバーアームの曲げが多くの場合制限されているからである。マクロカンチレバーセンサーは、液体浸漬状態または気体中または真空下で用いることができる。一般に、カンチレバーセンサーを液体中より気体/真空中で用いる場合に、感度はより高くなる。液体に湿らせることは感度に悪影響を与える傾向がある。しかし、液体媒体中で分析物を測定することには、多くの実際的な用途がある。
【0004】
既知のマイクロカンチレバーセンサーの1つの種類は、シリコンベースのマイクロカンチレバーセンサーである。代表的なシリコンベースのマイクロカンチレバーセンサーは、共振器として作用するマイクロカンチレバーを含む。マイクロカンチレバーは、マイクロカンチレバーのベースにある外部アクチュエーターにより駆動されて、共振器に振動を発生させる。一般に、振動は外部の光学検波器により検出される。代表的なシリコンベースのマイクロカンチレバーの1つの欠点は、検出に必要な複雑な外部光学部品である。さらに、光学的検出手段は、光学的に透明な試料へのマイクロカンチレバーセンサーの適用を制限するという欠点がある。別の欠点は、外部アクチュエーターによりセンサーに付加される重量および複雑さである。さらに他の欠点は、外部アクチュエーターが、マイクロカンチレバーのベース部にのみ配置可能であることであり、これは、カンチレバーの振動を駆動させる際にその有効性を制限する。シリコンベースのマイクロカンチレバーセンサーのさらなる欠点は、機械的に脆弱であることである。したがって、シリコンベースのマイクロカンチレバーセンサーは、液体流速の高い環境では用いることができない。さらに、代表的なシリコンベースのマイクロカンチレバーセンサーは、液体媒体中では粘性減衰のために検出感度が損われる。
【0005】
既知のカンチレバーセンサーの他の種類は、石英ベースの圧電カンチレバーセンサーである。石英は弱圧電性であり、したがってシリコンベースのカンチレバーセンサーと同様に、石英ベースの圧電カンチレバーセンサーは、液体媒体中では粘性減衰のために検出感度が損われる。さらに、石英ベースのセンサーの検出感度は、センサーの平面形状により制限される。
【0006】
従来の圧電カンチレバーは、圧電層の一部または全表面上に非圧電層を取り付けて製造されることが知られている。いくつかの従来の圧電カンチレバーにおいて、圧電層は1つの端で固定され、そのため圧電材料が励振されると、非圧電層が曲がって圧電材料に生じたひずみに対応する。励振周波数が下にある機械構造の固有周波数に等しい場合、共振が起こる。この型の圧電カンチレバーセンサーは、ミリメートルサイズで約100kHzより低い周波数において動作することが知られている。現在、より高い周波数は、カンチレバーセンサーを非常に短く(長さ1.0mm未満)、非常に狭く(幅0.1mm未満)、および非常に薄く(厚さ100μm未満)することによってのみ、得ることができる。しかし、カンチレバーセンサーの寸法を小さくすると、特に幅を狭めると、粘性減衰のために液体媒体中での使用性が損なわれる。減衰は、カンチレバー幅の二乗に逆比例して増加する。
【0007】
最新のバイオセンシング技術は、蛍光、レーザー、光ファイバーに基づく方法、水晶微量天秤技術、電気化学的酵素免疫測定法、および/または金属粒子への結合に依存する。これらの技術のほとんどは直接的ではなく、定量的でもない。これらの技術の多くはまた、非常に遅い。さらに、前記技術のほとんどは、種々の異なるパラメータを測定する便利な方法を提供可能な、質量変化の測定には役に立たない。
【0008】
共振周波数に基づく質量センサーには3種類の要素、アクチュエーター(ドライバー)、共振器、および検出器が必要である。質量センサーの1例は、シリコンベースのマイクロカンチレバーであり、これは存在するシリコンベースの手法に容易に統合することができる。シリコンベース・マイクロカンチレバー質量センサーにおいて、マイクロカンチレバーは共振器として作用し、マイクロカンチレバーのベースにある外部のチタン酸ジルコン酸鉛(PZT)アクチュエーターにより駆動されて共振器に振動を発生させ、これを外部の光学検波器によって検出することができる。バイオ関連の検出では、受容体がカンチレバー表面に固定化される。カンチレバー表面に固定化された受容体への抗原の結合は、カンチレバーの質量を増加させ、共振周波数の減少を引き起こす。標的分子の検出は、機械的共振周波数のモニタリングにより実現される。シリコンベースのマイクロカンチレバーは評判がよいが、これらは検出において、複雑な外部の光学部品に依存している。さらにPZT振動ドライバーが、センサーの重量および複雑性に付加される。さらに、外部アクチュエーターは、マイクロカンチレバーのベース部にのみ配置可能であり、これは、カンチレバーの振動を駆動させる際にその有効性を制限する。光学検出手段はまた、光学的に透明な試料への適用を制限する。
【0009】
質量検出に加えて、シリコンベースのマイクロカンチレバーはまた、小分子に対するセンサーとしても用いられており、これは、カンチレバー上に発生した応力を、カンチレバーに付随する受容体上に種を吸着して検出することによる。抗体またはDNA受容体でマイクロカンチレバーの表面を被覆して、標的生体分子に結合させる。標的分子の、マイクロカンチレバー表面の受容体への結合または分離の際に発生する応力は、マイクロカンチレバーのたわみを引き起こし、これは外部の光学要素により、またはカンチレバー表面の圧電抵抗性被覆層上の吸着/応力誘発性DC電圧により、検出することができる。
【0010】
シリコンベースのセンサーに比べて、ミリメートルサイズの圧電カンチレバーセンサーは嵩高くなく、複雑でもない。圧電デバイスは、その短い応答時間および高い圧電係数のために、優れた変換候補である。これらは圧電性であるため、機械的共振の駆動および検出を、共振器内で電気的に便利に行うことができる。現在、圧電バイオセンサーは、検出に厚さモード共振を用いるディスクデバイスである、市販の水晶微量天秤(QCM)に基づく。水晶は弱い圧電材料であるが、層厚さのモニターとして広く用いられ、その理由の一部は、膜作製用の大きい単結晶水晶が利用できるためである。10−9g/cm2の最小検出可能質量密度(DMD)を有する5MHzのQCMの典型的な質量検出感度は、約10−8g/Hzであり、ミリメートルサイズの圧電カンチレバーよりも約4桁ほど感度が低い。
【0011】
長さ約100μm、幅数10μm、および厚さ数μmのマイクロカンチレバーが存在する。このようなマイクロカンチレバーは、曲げモードまたは共振モードで検出に用いられる。これらのマイクロカンチレバーの欠点は、その共振特性が粘性減衰のために著しく低下することである。さらに、これらの液体媒体中での使用は、数μl/分の非常に低い流速において実現された。
【0012】
D. W. CarrおよびH. G. Craigheadの「Fabrication of nanoelectromechanical systems in single crystal silicon using silicon on insulator substrates and electron beam lithography」J. vac. Sci. Technology. B., 15(6), 1997. pp 2760-2763には、数百nmオーダーのメッシュ構造のビームセンサーおよび多重ビームセンサーの製造が開示され、40MHzの高い共振周波数が達成された。2007年1月23日出願の米国の同時係属出願第11/659,919号、名称「Self-Exciting, Self-Sensing Piezoelectric Cantilever Sensor」は、本発明者により共同で発明され、ミリメートルサイズの圧電励振カンチレバーセンサーの液体試料環境における構造および基本操作について述べている。
【0013】
したがって、現在存在するセンサーの検出能力を改善することに対する要求、および空中浮遊種を検出するための改善された能力を有するセンサー提供の要求が存在する。
【発明の概要】
【0014】
概要
自己励振・自己検出型圧電カンチレバー検出装置は、圧電層と、これに取り付けられた非圧電層であって、非圧電層の遠位端が圧電層の遠位端を越えて伸びるか、または圧電層の遠位端が非圧電層の遠位端を越えて伸びるような様式で取り付けられている、前記非圧電層とを含む。すなわち、圧電層は非圧電層に、圧電層と非圧電層が同一の広がりを持たない様式で結合している。本圧電カンチレバー検出装置の種々の構成において、圧電層、非圧電層、または両者は、少なくとも1つのベースに固定されている。電極は、圧電層と動作可能に関連する。自己励振・自己検出型圧電カンチレバーセンサーは、質量変化を検出するために用いられる。検出装置上の分析物の質量を決定するために、カンチレバーセンサーの機械要素の共振周波数を測定する。測定された共振周波数をベースライン共振周波数と比較して、周波数の差を決定する。周波数の差は、検出装置上の分析物の質量を示す。
【0015】
本発明の態様によれば、空中浮遊病原体の空気中での検出は、液体または固体マトリックス中での試料収集を必要とすることなく、実施される。1つの側面によれば、例えば生物学的または化学的物質などの標的分析物の空中検出の方法は、検出装置を空中浮遊分析物に暴露することにより実施される。検出装置上に位置する識別実体は分析物に結合し、分析物が気体中に存在している間に検出可能である。具体的な識別実体の例は、化学物質の検出用の化学コーティングおよび生物物質の検出用の固定化抗体を含む。
【0016】
本発明の1つの側面において、検出装置は、圧電層、非圧電層、およびこれら2つの層のどちらかの上に位置する識別実体を含む、センサーを含む。第1の態様において、センサーは、1つの端のみで固定されたカンチレバーアセンブリである。ここで、圧電層はベースに接続され、非圧電層は、圧電層の端に重なり合う様式で取り付けられる。電極は圧電層に取り付けられ、電気的に駆動されて、圧電層に共振を励起する。非圧電層上の識別領域は、気流に暴露された場合に分析物を引き寄せ、圧電層および非圧電層および識別領域の組み合わせにより形成されるカンチレバーの質量変化を引き起こす。ベースライン共振周波数と比較した、分析物が付着した場合の共振周波数の変化を決定し、周波数シフトは、識別実体に保持された分析物の量を示す。
【0017】
センサーの構成は、異なる周波数検出点に適合するために変えてもよい。センサーの第2の型は、ビーム(梁)型のセンサーの使用が関与し、ここで非圧電層は両端でベース構造に取り付けられる。圧電層は非圧電層の上に配置され、上記のように、共振に励起される。非圧電層または圧電層どちらかの上の識別実体は、エアロゾル化された分析物への暴露により、質量変化を引き起こし、ビームセンサーの共振周波数の周波数シフトをもたらす。このようにして分析物を検出することができ、その質量が決定される。センサーの第3の型は、ビームセンサーの変形であり、ここで圧電層はビームであり、非圧電層はビームの最上部に取り付けられる。
【0018】
空中浮遊分析物を検出する装置は、噴霧器に取り付けられたカンチレバーセンサーを含む暴露管を含み、該噴霧器は分析物をエアロゾル化して、分析物を、センサーを横切る気流中に存在させる。分析器はセンサーの共振周波数を測定し、分析物が気流中に存在するかどうか、およびその量を決定する。
【0019】
本発明を特徴づける、これらおよび種々の他の利点および新規な特性は、本明細書に付随するクレームに詳細に指摘され、本明細書の一部を構成する。しかし、本発明、その利点およびその使用により得られる目的物のよりよい理解のために、本明細書のさらなる一部を構成する図および付随する記述事項も参照すべきであり、これらには、本発明の好ましい態様の説明および記載がある。
【0020】
この概要は、選択された概念を単純化した形で紹介するために提供されたものであり、これらについては詳細な説明においてさらに記載される。この概要は、クレームの対象の鍵となる特徴または本質的な特徴を同定することを意図せず、また、クレームの対象の範囲を限定するために用いることも意図しない。
上記の概要および以下の詳細な説明は、添付の図面と併せて読む場合によりよく理解される。自己励振・自己検出型圧電カンチレバーセンサーの説明のために、その例示の構造が図面に示されている;しかし、自己励振・自己検出型圧電カンチレバーセンサーは、開示された特定の方法および手段に限定されるものではない。
【図面の簡単な説明】
【0021】
【図1】図1は、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図2】図2は、例示の自己励振・自己検出型圧電カンチレバーセンサーの断面図であり、圧電層に動作可能に関連する電極用の電極配置領域を示す。
【図3】図3は、例示の自己励振・自己検出型圧電カンチレバーセンサーの断面図であり、自己励振・自己検出型圧電カンチレバーセンサーのベース部内の、例示の電極配置を示す。
【図4】図4は、例示の自己励振・自己検出型圧電カンチレバーセンサーの断面図であり、自己励振・自己検出型圧電カンチレバーセンサーのベース部の外の、例示の電極配置を示す。
【図5】図5は、圧電層の遠位端が非圧電層の遠位端とぴったり重なっている、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図6】図6は、圧電層の遠位端が非圧電層の遠位端を越えて伸び、圧電層の隣接端が非圧電層の隣接端を越えて伸びている、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図7】図7は、2つのベース部を有する、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図8】図8は、圧電層がどちらのベース部にも取り付けられていない、自己励振・自己検出型圧電カンチレバーセンサーの他の例示の構成の図である。
【図9】図9は、2つの端で固定された圧電層を有する、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図10】図10は、圧電層が2つの部分を有し、その1つが固定された、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図11】図11は、圧電層が2つの部分を有し、その1つが固定された、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の別の図である。
【図12】図12は、圧電層が2つの部分を有し、そのどちらもが固定されていない、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図13】図13は、固定された非圧電部と、固定されていない圧電部とを有する、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図である。
【図14】図14は、非圧電層がどちらのベース部にも取り付けられていない、自己励振・自己検出型圧電カンチレバーセンサーの他の例示の構成の図である。
【図15】図15は、圧電部が、圧電部と異なる幅を有する、自己励振・自己検出型圧電カンチレバーセンサーの他の例示の構成の図である。
【図16】図16は、圧電層と非圧電層を含む、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成の図であり、ここで圧電層の幅は非圧電層16の幅より狭く、圧電層の遠位端は非圧電層の遠位端を越えて伸び、圧電層の隣接端は非圧電層の隣接端を越えて伸びている。
【図17】図17は、自己励振・自己検出型圧電カンチレバーセンサーを利用して、分析物を検出するための例示の方法のフロー図である。
【図18】図18は、空気中で作動された、図1に示す自己励振・自己検出型圧電カンチレバーセンサーの構成の、例示の共振スペクトルのプロットである。
【図19A】図19Aは、本発明の方法において有用な圧電カンチレバーセンサーの斜視図である。
【図19B】図19Bは、本発明の方法において有用な固定圧電励振カンチレバービームセンサーの態様の図である。
【図19C】図19Cは、本発明の方法において有用な浮動圧電励振カンチレバービームセンサーの態様の図である。
【図19D】図19Dは、本発明の方法において有用な固定バイモルフ圧電励振カンチレバービームセンサーの態様の図である。
【図19E】図19Eは、本発明の方法において有用なオーバーハング型圧電励振カンチレバービームセンサーの態様の図である。
【図19F】図19Fは、本発明の方法において有用な固定チタン酸ジルコン酸鉛(PZT)圧電励振カンチレバービームセンサーの態様の図である。
【図19G】図19Gは、本発明による浮動先端PEMC(ftPEMC)センサーの態様の概略図である。
【図20】図20は、図1に示すものなどのオーバーハング型圧電カンチレバーセンサーの第1の態様の、空気中における共振スペクトルである(図47表1のoPEMC#1参照)。
【図21】図21は、1に示すオーバーハング型圧電カンチレバーセンサーの第2の態様の、空気中における共振スペクトルである(図47表1のoPEMC#2参照)。
【図22】図22は、図1に示すオーバーハング型圧電カンチレバーセンサーの第3の態様の、空気中における共振スペクトルである(図47表1のoPEMC#3参照)。
【図23】図23は、図1に示すオーバーハング型カンチレバーセンサーの第4の態様の、空気中における共振スペクトルである(図47表1のoPEMC#4参照)。
【図24】図24は、図1に示すオーバーハング型カンチレバーセンサーの第5の態様の共振スペクトルである(図47表1のoPEMC#5参照)。
【図25】図25は、100mVで励振された固定PEMCBセンサー(aPEMCB、図19B)の、空気中における、位相角対励振周波数の共振スペクトルプロットである。
【図26】図26は、浮動PEMCB(fPEMCB#1、図19C)センサーの、空気中100mVの励振電圧における、位相角対励振周波数プロットを用いた共振特性を示す図である。
【図27】図27は、固定バイモルフPEMCB(abPEMCB#1、図19D)センサーの、空気中100mVの励振電圧における、位相角対励振周波数プロットを用いた共振スペクトルである。
【図28】図28は、オーバーハング型PEMCB(oPEMCB#1、図19E)センサーの、空気中100mVの電圧で励振された場合の共振スペクトルである。
【図29A】図29Aは、空中浮遊炭疽菌検出の実装に用いる装置の図である。
【図29B】図29Bは、空中浮遊炭疽菌検出の実装に用いる装置の図である。
【図30A】図30Aは、空気中で炭疽菌を検出する検出実験の結果を示す図である。
【図30B】図30Bは、対照として無機粒子を用いた、空気中で炭疽菌を検出する検出実験の結果を示す図である。
【図31】図31は、図30Aの実験についての検出の確認を示す図である。
【図32】図32は、本発明の方法により試験されたセンサーの走査型電子顕微鏡写真であり、センサー表面に固定化された炭疽菌胞子を示す。
【図33】図33は、本発明の湿度注入器の側面を示す図である。
【図34】図34は、本発明の方法のフロー図である。
【図35】図35は、センサーのノッチ構造を示す図である。
【図36】図36は、センサーのサンドイッチ構造を示す図である。
【図37】図37は、センサーの代替のサンドイッチ構造を示す図である。
【図38】図38は、センサー形状について図19Aの代替を示す図である。
【図39】図39は、図19Aのセンサーの別の代替の構成を示す図である。
【図40】図40は、図19Fのビーム型構造を示す図である。
【図41】図41は、図19Eの代替の構成を示す図である。
【図42】図42は、図19Gの代替の構成を示す図である。
【図43】図43は、図42の代替の構成を示す図である。
【図44】図44は、図36の代替の構成を示す図である。
【図45】図45は、層が少なくとも部分的にベースに固定されている、複数層のセンサーの構成を示す図である。
【図46】図46は、修正されたベースを有する構成を示す図である。
【図47】図47は、表1を含む図である。
【図48】図48は、表2を含む図である。
【図49】図49は、表3を含む図である。
【図50】図50は、表4を含む図である。
【発明を実施するための形態】
【0022】
例示の態様の詳細な説明
本明細書に記載の自己励振・自己検出型圧電カンチレバーセンサーは、極少量の分析物を検出および測定する能力を提供する。自己励振・自己検出型圧電カンチレバーセンサーは、液体中に浸漬された分析物、および気体または真空中に含まれる分析物を、検出および測定するために用いることができる。種々の例示の構成において、自己励振・自己検出型圧電カンチレバーセンサーは、少なくとも1つの圧電層および少なくとも1つの非圧電層を含み、ここで圧電層は非圧電層に、圧電層と非圧電層が同一の広がりを持たない様式で結合している。圧電層、非圧電層、または両者は、少なくとも1つのベースに固定されている。圧電層および非圧電層は、種々の幅、長さおよび厚さであることができる。
【0023】
自己励振・自己検出型圧電カンチレバーセンサーは、その上に蓄積された分析物の質量を決定するために用いることができる。1つの例示の態様において、自己励振・自己検出型圧電カンチレバーセンサーの一部は媒体中(例えば、液体、気体、真空)に配置される。媒体中にあって、自己励振・自己検出型圧電カンチレバーセンサーの共振周波数を測定し、ベースライン共振周波数と比較する。測定された共振周波数とベースライン共振周波数の差は、自己励振・自己検出型圧電カンチレバーセンサーに蓄積された(例えば、結合された、吸着された、吸収された)分析物の質量を示す。
【0024】
分析物は、自己励振・自己検出型圧電カンチレバーセンサーの非圧電部の表面に、直接または間接的に結合されることができる。分析物の、自己励振・自己検出型圧電カンチレバーセンサーの非圧電部への結合は、自己励振・自己検出型圧電カンチレバーセンサーの質量の変化、自己励振・自己検出型圧電カンチレバーセンサーの剛性の変化、またはこれらの組み合わせを引き起こす。質量および/または剛性の変化は、共振周波数の変化として測定することができ、適切な分析装置、例えばオペアンプ、インピーダンスアナライザー、ネットワークアナライザー、発振回路などにより、モニタリングおよび測定可能である。自己励振・自己検出型圧電カンチレバーセンサーの少なくとも一部のみが液体中に浸漬された場合の共振周波数の変化は、検出可能で測定可能である。自己励振・自己検出型圧電カンチレバーセンサーの少なくとも一部のみが気体または真空中に浸漬された場合の共振周波数の変化も、検出可能で測定可能である。
【0025】
自己励振・自己検出型圧電カンチレバーセンサーは、例えば0.1MHz〜6MHzのオーダーなどの高周波数においても動作可能である。これらの高周波数において、Q係数(共振ピーク周波数の、共振ピーク高さの中点におけるピーク幅に対する比率)で10〜100のオーダーの値を、液体浸漬下で得ることができる。自己励振・自己検出型圧電カンチレバーセンサーは、液体媒体、気体媒体および真空媒体中で比較的高周波数において動作可能である。したがって自己励振・自己検出型圧電カンチレバーセンサーは、質量変化に対して極限の感度を提供する。自己励振・自己検出型圧電カンチレバーセンサーは、媒体中に非常に低濃度で存在する分析物に対して特に好適であり、媒体は例えば、体液、水、および食品材料などである。
【0026】
本明細書に記載の自己励振・自己検出型圧電カンチレバーセンサーは、液体媒体中に浸漬された場合に、100アトグラム/Hz(100×10−18g/Hz)以下もの少量で蓄積された質量における変化を検出する能力を提供する。したがって、質量変化を検出することについて、自己励振・自己検出型圧電カンチレバーセンサーの感度は、石英結晶マイクロカンチレバーセンサーより約百万倍、標準の分析装置より約100,000倍、そして従来の3層圧電カンチレバー設計より約10,000倍も高い。
【0027】
自己励振・自己検出型圧電カンチレバーセンサーは、その非圧電部に結合した極小濃度の分析物の検出を可能とする。自己励振・自己検出型圧電カンチレバーセンサーを用いると、病原体およびタンパク質は、数個の病原体/mLまでの濃度において、および平均サイズ(60kダルトン、kDa)のタンパク質については、1病原体/mL未満での濃度で検出可能である。さらに、非圧電部の有機または無機官能基に結合する任意の分析物が検出可能である。自己励振・自己検出型圧電カンチレバーセンサーは、比較的高い流速の媒体中で動作可能である。圧電カンチレバーセンサーは、流速0.5〜10.0mL/分を有する媒体中で動作可能であり、これは、既知の曲げモードマイクロカンチレバーで成功して用いられる流速より、約1000倍速い。
【0028】
本圧電カンチレバーの種々の例示の用途は以下を含む:炭疽菌などのバイオテロリズム剤の検出、大腸菌などの食品媒介病原体の検出、食品および水中の病原体の検出、体液中のある細胞型(例えば、循環する腫瘍細胞)の検出、体液中のバイオマーカー(例えば、特定の病態生理をマークするタンパク質、α−フェトタンパク質、β2−ミクログロブリン、膀胱癌抗原、乳癌マーカーCA−15−3、および他のCA類(癌抗原)、カルシトニン、癌胎児性抗原、その他)の検出、例えばトリニトロトルエン、ジニトロトルエンの存在などの爆発性マーカーの検出、および空気媒介毒素および水媒介毒素の検出。自己励振・自己検出型圧電カンチレバーセンサーはまた、ピコグラムレベルでの生物学的実体の検出および、タンパク質−タンパク質相互作用の、静的および動的両方の状態での検出にも用いることができる。
【0029】
病原体、例えば大腸菌は、自己励振・自己検出型圧電カンチレバーセンサーを用いて検出可能である。モデルタンパク質、リポタンパク質、DNAおよび/またはRNAの、1.0フェムトグラム/mL(10−15g)の濃度での、および病原体の、1病原体/mLでの検出もそれぞれ、液体中で直接、標的分析物に特異的な抗体で固定化された自己励振・自己検出型圧電カンチレバーセンサーを用いて、約1〜2MHzの周波数で測定することにより実現可能である。自己励振・自己検出型圧電カンチレバーセンサーは、汚染物質が存在する場合でも、擬陽性または擬陰性なしに、標的分析物を検出することができる。本明細書に記載の自己励振・自己検出型圧電カンチレバーセンサーは、加工なし、調製なし、濃縮段階なし、および/またはいかなる種類の濃縮なしの生の試料に用いる場合に特に有利である。自己励振・自己検出型圧電カンチレバーセンサーを用いた分析物の検出は、流れる状態のもとで、例えば0.5〜10.0mL/分での、生の試料中で直接行うことができる。クリーンな試料が利用可能である場合、例えば研究室環境などでは、1フェムトグラム/mLでの検出も可能である。この感度は、既知の光学技術に付随する感度より約100倍も高い。
【0030】
以下に記載するように、自己励振・自己検出型圧電カンチレバーセンサーの感度は、一つにはそれ自身の幾何学的デザインによる。自己励振・自己検出型圧電カンチレバーセンサーの圧電層と非圧電層の相対的な長さと幅が、感度を決定し、また自己励振・自己検出型圧電カンチレバーセンサーが提供する周波数スペクトルのピーク形状も決定する。以下にさらに詳細に説明するように、自己励振・自己検出型圧電カンチレバーセンサーは、一緒に結合された圧電層および非圧電層を含み、これらは、圧電層の一部が非圧電層を越えて伸びるか、または非圧電層の一部が圧電層を越えて伸びるか、またはこれらの組み合わせであるような様式で結合される。したがって、圧電層と非圧電層は、同一の広がりを持たない。すなわち、自己励振・自己検出型圧電カンチレバーセンサーは、非圧電層の表面全体が圧電層の表面全体に結合されてはいない様式で構成されている。
【0031】
自己励振・自己検出型圧電カンチレバーセンサーの感度は、一つにはカンチレバーセンサーの圧電層を動作および検出の両方に用いていること、および自己励振・自己検出型圧電カンチレバーセンサーの圧電層の電気機械的特性による。共振において、振動するカンチレバーは、圧電層の応力を、自己励振・自己検出型圧電カンチレバーセンサーのベース部分に集中させる。これにより、圧電層の抵抗成分に増幅された変化がもたらされ、共振周波数に大きなシフトが生じる。この応力を、低い曲げ係数を有する圧電層の部分(例えばよりフレキシブルな部分)に導くことにより、共振周波数の関連するシフトの探索が可能となって、自己励振・自己検出型圧電カンチレバーセンサーの質量における、極めて小さな変化が検出される。例えば、圧電カンチレバーセンサーの圧電層と非圧電層の両方が同じ端において固定されている場合(例えば、エポキシに入れられた場合)、センサーは質量変化に対して感度が低いが、これは、固定端に近接した検出圧電層の曲げ応力が、圧電層のみが固定された場合に比べて小さいからである。これは、組み合わされた2層の曲げ係数が、圧電層のみを固定した場合より高いためである。曲げ係数は、弾性係数と中性軸周りの慣性モーメントの積である。そして慣性モーメントは、厚さの三乗に比例する。
【0032】
図1は、圧電部14および非圧電部16を含む、自己励振・自己検出型圧電カンチレバーセンサー12の図である。圧電部は大文字のP、非圧電部は大文字のNPと表示されている。自己励振・自己検出型圧電カンチレバーセンサー12は、無固定でオーバーハング型の、自己励振・自己検出型圧電カンチレバーセンサーの1形態を示す。自己励振・自己検出型圧電カンチレバーセンサー12が「無固定」と呼ばれるのは、非圧電層16がベース部20に取り付けられていないからである。自己励振・自己検出型圧電カンチレバーセンサー12が「オーバーハング型」と呼ばれるのは、非圧電層16が圧電層14の遠位端24を越えて伸び、非圧電層16のオーバーハング部分22を作り出しているからである。圧電部14は非圧電部16に、接着部18を介して結合される。圧電部14および非圧電部は、領域23で重なり合っている。接着部18は、圧電部14と非圧電部16の重なり部分の間に位置する。圧電部14は、ベース部20に結合されている。
【0033】
圧電部14は任意の好適な材料、例えば、チタン酸ジルコン酸鉛、マグネシウムニオブ酸鉛−チタン酸鉛固溶体、チタン酸鉛ストロンチウム、石英シリカ、圧電セラミックチタン酸ジルコン酸鉛(PZT)、および圧電セラミック−ポリマー繊維複合材等を含むことができる。非圧電部16は、任意の好適な材料、例えばガラス、セラミック、金属、ポリマー、および1または2以上のセラミックとポリマーの複合材、例えば二酸化ケイ素、銅、ステンレス鋼、チタン等を含むことができる。
【0034】
自己励振・自己検出型圧電カンチレバーセンサーは、任意の適当な組み合わせの寸法を有する部分を含むことができる。さらに、物理的寸法は一定でなくてもよい。したがって、圧電層および/または非圧電層は先細形状であることができる。例えば、圧電部(例えば圧電部14)の長さ(例えば図1のLP)は、約0.1〜約10mmの範囲であることができる。非圧電部(例えば非圧電部16)の長さ(例えば図1のLNP)は、約0.1〜約10mmの範囲であることができる。重なり領域(例えば重なり領域23)は、約0.1〜約10mmの範囲の長さであることができる。圧電部(例えば圧電部14)の幅(例えば図1のWP)、および非圧電部(例えば非圧電部16)の幅(例えば図1のWNP)は、約0.1mm〜約4.0mmの範囲であることができる。圧電部の幅(例えば図1のWP)は、非圧電部の幅(例えば図1のWNP)と異なっていてもよい。圧電部(例えば圧電部14)の厚さ(例えば図1のTP)、および非圧電部(例えば非圧電部16)の厚さ(例えば図1のTNP)は、約0.1mm〜約4.0mmの範囲であることができる。圧電部の厚さ(例えば図1のTP)もまた、非圧電部の厚さ(例えば図1のTNP)と異なることができる。
【0035】
図2は、自己励振・自己検出型圧電カンチレバーセンサー12の断面図であり、圧電部14と動作可能に関連する電極のための、電極配置領域26を示す。電極は、括弧26で示すように、自己励振・自己検出型圧電カンチレバーセンサーの圧電部の上の任意の適切な位置に配置することができる。例えば、図3に示すように、電極28は、ベース部20内の圧電部14に結合することができる。または、図4に示すように、電極32は、圧電部14の、ベース部20内以外の任意の位置であってかつ非圧電部16が重なっていない位置に結合することができる。電極は、圧電部14に対して対称的に配置する必要はない。例示の態様において、1つの電極は圧電部14のベース部20内に、他の電極は圧電部14のベース部20以外の位置に、結合することができる。電極、または任意の適切な手段(例えば、誘電手段、無線手段)を用いて、電気信号を圧電部14へと提供し、またはこれから受け取ることができる。1つの例示の態様において、電極は圧電部14に、接着パッドなど(図3の要素30、および図4の要素34)を介して、結合することができる。例示の接着パッドは、化学センシングまたは生物センシングで用いるのに適当な受容体材料および/または吸収材料を不動化することができる、任意の適切な材料(例えば、金、二酸化ケイ素)を含むことができる。
【0036】
電極は、任意の適切な位置に配置することができる。1つの例示の態様において、電極は圧電層14の応力集中の位置近くに、動作可能に配置される。上述したように、自己励振・自己検出型圧電カンチレバーセンサーの感度は部分的に、応力を圧電層14に有利に導く(集中させる)ことおよび、この近くに電極を配置することによる。本明細書に記載された自己励振・自己検出型圧電カンチレバーセンサー(およびその変形)の構成は、振動関連応力を圧電層14に集中させる傾向がある。共振において、自己励振・自己検出型圧電カンチレバーセンサーの幾つかの構成では、振動するカンチレバーは、圧電層14のベース部20に近い部分に応力を集中させる。これにより、圧電層14の抵抗成分に増幅された変化がもたらされ、応力の高い部位において共振周波数の大きなシフトが生じる。この応力を、低い曲げ係数を有する(例えば、よりフレキシブルである)圧電層14の部分に導くことにより、共振周波数の関連するシフトの探索が可能となって、自己励振・自己検出型圧電カンチレバーセンサーの質量における、極めて小さな変化が検出される。したがって、自己励振・自己検出型圧電カンチレバーセンサーの例示の構成において、ベース部20近くに位置する圧電層14の厚さは、ベース部20から遠い部分の圧電層14より薄い。これにより、応力を圧電層14のより薄い部分に向けて集中させる傾向となる。例示の構成において、電極を、自己励振・自己検出型圧電カンチレバーセンサーのベース部近くの、振動関連集中応力の位置またはその近くに配置する。自己励振・自己検出型圧電カンチレバーセンサーの他の例示の構成において、電極を、自己励振・自己検出型圧電カンチレバーセンサーのベース部への集中応力の近接度に関わりなく、圧電層における集中応力の位置に近接して配置する。
【0037】
自己励振・自己検出型圧電カンチレバーセンサーは、複数の構成にしたがって構成することができ、これらの幾つかは図5〜図16に示されている。しかし、本明細書に示されている構成は全ての可能な構成を表すものではなく、むしろ自己励振・自己検出型圧電カンチレバーセンサーの構成の代表的な例を表すものであることが理解される。図5は、無固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成36の図であり、ここで圧電部14の遠位端40は、非圧電部16の遠位端38とぴったり重なっている。自己励振・自己検出型圧電カンチレバーセンサー36を「無固定」と呼ぶのは、非圧電部16がベース部20に取り付けられていないからである。圧電部14は、非圧電部16に接着部18を介して結合される。接着部18は、圧電部14と非圧電部16の重なり部分の間に位置する。圧電部14は、ベース部20に結合される。
【0038】
図6は、無固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成42の図であり、ここで圧電部14の遠位端44は、非圧電部16の遠位端46を越えて伸びており、圧電部14の隣接端43は、非圧電部16の隣接端45を越えて伸びている。圧電部14は、非圧電部16に接着部18を介して結合される。接着部18は、圧電部14と非圧電部16の重なり部分の間に位置する。圧電部14は、ベース部20に結合される。
【0039】
自己励振・自己検出型圧電カンチレバーセンサーはまた、複数のベース部を含むように構成することもできる。複数のベース部を含む自己励振・自己検出型圧電カンチレバーセンサーの例示の構成を、図7〜図14に示す。自己励振・自己検出型圧電カンチレバーセンサーを、複数のベース部を含むように構成することは、直感的に分かりにくいが、これは、当業者の期待としては、自己励振・自己検出型圧電カンチレバーセンサーの両端を固定することで、自己励振・自己検出型圧電カンチレバーセンサーを複数のベース部に固定した結果自己励振・自己検出型圧電カンチレバーセンサーの変位の制限が生じて、応答の劣化をもたらすからである。2つのベース部を含む自己励振・自己検出型圧電カンチレバーセンサーの構成に関して、1つの例示の態様において、圧電部の変位でなく、圧電部の応力を測定する。自己励振・自己検出型圧電カンチレバーセンサーを、2つのベース部を含むように構成すると、比較的高い媒体流の条件のもとで動作し、優れた質量変化感度を提供可能な、安定で堅固なセンサーが提供される。機械的に堅固な自己励振・自己検出型圧電カンチレバーセンサーであって、比較的広い範囲の媒体流条件に対し、性能の最小の決定力で耐用できる前記センサーを提供すると共に、自己励振・自己検出型圧電カンチレバーセンサーを2つのベース部を含むように構成することにより、1つのベース部を有する類似寸法のカンチレバーセンサーと比べて、3〜4倍高い(例えば100kHzより高い)基本周波数を提供する。
【0040】
図7は、2つのベース部20、50を含む、固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成48の図である。自己励振・自己検出型圧電カンチレバーセンサー48を「固定」と呼ぶのは、非圧電部16がベース部20に取り付けられているからである。自己励振・自己検出型圧電カンチレバーセンサー48に示す構成において、圧電部14の隣接端52と非圧電部16の隣接端54の両方は、ベース部20に取り付けられている。圧電部と非圧電部は、任意の適切な手段を介してベース部に取り付けることができる。非圧電部16の遠位端58もまた、ベース部50に取り付けられている。非圧電部16の遠位端58は、圧電部14の遠位端56を越えて伸びている。圧電部14は、非圧電部16に接着部18を介して結合される。接着部18は、圧電部14と非圧電部16の重なり部分の間に位置している。
【0041】
図8は、2つのベース部20、50を含む、固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成60の図であり、ここで圧電部14は、ベース部20またはベース部50のどちらにも取り付けられていない。自己励振・自己検出型圧電カンチレバーセンサー60に示す構成において、非圧電部16の隣接端62はベース部20に取り付けられ、非圧電部16の遠位端64はベース部50に取り付けられている。非圧電部16の隣接端62は、圧電部14の隣接端66を越えて伸び、非圧電部16の遠位端64は、圧電部14の遠位端68を越えて伸びている。圧電部14は、非圧電部16に接着部18を介して結合される。接着部18は、圧電部14と非圧電部16の重なり部分の間に位置している。
【0042】
図9は、固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成70の図であり、これは2つのベース部20、50を含み、2つの圧電部14、72を含み、および2つの接着部18、74を含む。自己励振・自己検出型圧電カンチレバーセンサー70に示す構成において、圧電部14の隣接端76および非圧電部16の隣接端78は、ベース部20に取り付けられている。圧電部72の遠位端80および非圧電部16の遠位端82は、ベース部50に取り付けられている。非圧電部16の隣接端78は、圧電部72の隣接端86を越えて伸びている。非圧電部16の遠位端82は、圧電部14の遠位端84を越えて伸びている。圧電部14の遠位端84と、圧電部72の隣接端86は、その間にスペース88を形成する。圧電部14は、非圧電部16に接着部18を介して結合される。圧電部72は、非圧電部16に接着部74を介して結合される。接着部18および74はそれぞれ、圧電部14と非圧電部16、および圧電部72と非圧電部16の重なり部分の間に位置している。
【0043】
図9に示す構成70についての種々の代替的例示構成においては、圧電部14、72の1つのみが、それぞれのベース部20、50に取り付けられる。例えば、図10に示した1つの例示の構成においては、圧電部14がベース部20に取り付けられ、圧電部72はベース部50に取り付けられていない。別の例示の構成においては、図11に示すように、圧電部72がベース部50に取り付けられ、圧電部14はベース部20に取り付けられていない。さらに別の例示の構成においては、図12に示すように、圧電部14も圧電部72も、それぞれのベース部20、50に取り付けられていない。圧電層が複数の部分からなっている種々の例示の構成において、電極は任意の1または2以上の圧電部に取り付けることができる。例えば、図9、図10、図11および図12に示す例示の構成において、電極は圧電部14、圧電部72、またはこれらの組み合わせに取り付けることができる。
【0044】
図13は、2つのベース部20、50を含む、固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成90の図であり、ここで圧電部14はベース部20に取り付けられ、非圧電部16はベース部50に取り付けられている。圧電部14は、非圧電部16に接着部18を介して結合される。接着部18は、圧電部14と非圧電部16の重なり部分の間に位置している。非圧電部16の遠位端98は、圧電部14の遠位端96を越えて伸びている。圧電部14の隣接端92は、非圧電部16の隣接端94を越えて伸びている。
【0045】
図14は、2つのベース部20、50を含む、固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成100の図であり、ここで非圧電部16は、ベース部20とベース部50のどちらにも取り付けられていない。自己励振・自己検出型圧電カンチレバーセンサー100に示す構成において、圧電部14の隣接端102は、ベース部20に取り付けられており、圧電部14の遠位端104は、ベース部50に取り付けられている。圧電部14の隣接端102は、非圧電部16の隣接端106を越えて伸びており、圧電部14の遠位端104は、非圧電部16の遠位端108を越えて伸びている。圧電部14は、非圧電部16に接着部18を介して結合される。接着部18は、圧電部14と非圧電部16の重なり部分の間に位置している。
【0046】
図15は、圧電部14と非圧電部16を含む、無固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成110の図であり、ここで圧電部の幅WPは、非圧電部の幅WNPより小さい。図15に示す構成110は、図1に示した構成12に類似であるが、ただし、WPはWNPより小である。したがって、自己励振・自己検出型圧電カンチレバーセンサー110は、無固定のオーバーハング型自己励振・自己検出型圧電カンチレバーセンサーの態様を示す。圧電部14は、非圧電部16に接着部(図15には接着部は示されず)を介して結合される。接着部は、圧電部14と非圧電部16の重なり部分の間に位置している。圧電部14はベース部20に結合される。
【0047】
図16は、圧電部14と非圧電部16を含む、無固定の自己励振・自己検出型圧電カンチレバーセンサーの例示の構成112の図であり、ここで圧電部の幅WPは非圧電部の幅WNPより小さく、および圧電部14の遠位端114は、非圧電部16の遠位端116を越えて伸びており、圧電部14の隣接端118は、非圧電部16の隣接端120を越えて伸びている。図16に示す構成112は、図6に示した構成42に類似であるが、ただし、WPはWNPより小である。圧電部14は、非圧電部16に接着部(図16には接着部は示されず)を介して結合される。接着部は、圧電部14と非圧電部16の重なり部分の間に位置している。圧電部14はベース部20に結合される。
【0048】
図17は、自己励振・自己検出型圧電カンチレバーセンサーを用いた、分析物を検出するための例示の方法のフロー図である。自己励振・自己検出型圧電カンチレバーセンサーは、ステップ120において提供される。自己励振・自己検出型圧電カンチレバーセンサーは、上記に従って構成するか、またはこれらの任意の適切な変形に従って構成することができる。自己励振・自己検出型圧電カンチレバーセンサーは、ステップ122において分析物を受け取るよう準備する。例示の態様において、分析物の誘引物質を自己励振・自己検出型圧電カンチレバーセンサーの非圧電部に適用する。誘引物質は分析物に特異的である。したがって、誘引物質は標的分析物を引き付けるが、他の物質は引き付けない。例えば、自己励振・自己検出型圧電カンチレバーセンサーの非圧電部は、以下を引き付けるための誘引物質を含むことができる:炭疽菌などのバイオテロリズム剤、大腸菌などの食品媒介病原体、食品および水中の病原体、体液中の細胞型(例えば、循環する腫瘍細胞)、体液中のバイオマーカー(例えば、特定の病態生理をマークするタンパク質、α−フェトタンパク質、β2−ミクログロブリン、膀胱癌抗原、乳癌マーカーCA−15−3、および他のCA類(癌抗原)、カルシトニン、癌胎児性抗原、その他)、例えばトリニトロトルエン、ジニトロトルエンなどの爆発性マーカー、空気媒介毒素および水媒介毒素、タンパク質などの生物学的実体、およびこれらの組み合わせ。
【0049】
自己励振・自己検出型圧電カンチレバーセンサーを、ステップ124において媒体に暴露する。媒体は、任意の適切な媒体、例えば液体、気体、液体と気体の組み合わせ、または真空などを含むことができる。媒体は、広い範囲の流動状態を示すことができる。標的分析物が媒体中に存在する場合、標的分析物は、誘引物質で処理された自己励振・自己検出型圧電カンチレバーセンサーの非圧電部に蓄積する。上記のように、標的分析物が自己励振・自己検出型圧電カンチレバーセンサーの非圧電部に蓄積(例えば結合)すると、自己励振・自己検出型圧電カンチレバーセンサーの剛性の変化、および/または自己励振・自己検出型圧電カンチレバーセンサーの質量の増加をもたらし、これにより自己励振・自己検出型圧電カンチレバーセンサーの共振周波数が減少する。
【0050】
自己励振・自己検出型圧電カンチレバーセンサーの共振周波数は、ステップ126で測定する。共振周波数は、任意の適切な手段により、例えばオペアンプ、インピーダンスアナライザー、ネットワークアナライザー、発振回路などにより、測定することができる。自己励振・自己検出型圧電カンチレバーセンサーの圧電部の圧電材料が励振されると、自己励振・自己検出型圧電カンチレバーセンサーの非圧電部が曲がって、圧電材料に生じたひずみに対応する。励振周波数が下にある機械構造の固有周波数に等しい場合、共振が起こる。
【0051】
測定した共振周波数を、ステップ128においてベースライン共振周波数と比較する。ベースライン共振周波数は、分析物が蓄積していない、自己励振・自己検出型圧電カンチレバーセンサーの共振周波数である。測定した共振周波数とベースライン共振周波数の間の周波数の差(周波数シフト)が計測されない場合(ステップ130において)、ステップ132において、分析物が検出されなかったと決定する。測定した共振周波数とベースライン共振周波数の間の周波数の差が計測された場合は(ステップ130において)、ステップ134において、分析物が検出されたこと、すなわち分析物が媒体中に存在することを決定する。ステップ136において、自己励振・自己検出型圧電カンチレバーセンサーの非圧電部に蓄積された分析物の質量を、ステップ130で計測した周波数シフトに応じて決定する。
【0052】
自己励振・自己検出型圧電カンチレバーセンサーの種々の構成を利用して、種々の実験が実施されている。図18は、図1に示す、空中で作動された自己励振・自己検出型圧電カンチレバーセンサーの構成12の、例示の共振スペクトルのプロット137である。幅Wpおよび幅WNPは、それぞれ約2mmである。プロット137は、励振電圧100mVでの、位相角(励振電圧と励振電流の間)対励振周波数を示す。第1共振周波数モード140は、およそ150〜200kHzの間で起こり、第2共振周波数モード142は、およそ250〜300kHzの間で起こった。共振スペクトルは、約980kHz、2.90MHzおよび4.60MHzにおいて、高次の特性ピークを示す。
【0053】
性質係数を、共振周波数の、ピーク高さの中点におけるピーク幅に対する比率として決定した。その結果、性質係数は、共振ピークの鮮鋭度の測度である。実験により、自己励振・自己検出型圧電カンチレバーセンサーの性質係数は、センサーが真空から液体流の環境までの異なる環境中に置かれた場合にも、大幅に減少しないことが示された。実験により、自己励振・自己検出型圧電カンチレバーセンサーの種々の構成のQ値は、ピークが検出された位置でのそれぞれの周波数モードに依存して、一般に10〜70の範囲であることも示された。自己励振・自己検出型圧電カンチレバーセンサーの種々の構成は、真空、空気および流れを含む粘性の環境中で用いられた場合に、一般にそのQ値は20%〜35%を超えて減少しなかった。性質係数の全体的な値における比較的小さなこの損失は、自己励振・自己検出型圧電カンチレバーセンサーの持つ能力、すなわち化学物質および種々の生物学的項目を、水および血流を含む粘性の環境中で正確に検出する能力を反映するものである。
【0054】
実験により、自己励振・自己検出型圧電カンチレバーセンサーの感度は、その寸法の関数であることが示された。自己励振・自己検出型圧電カンチレバーセンサーの形状寸法における特定の変化は、センサーの質量変化感度を増強し、したがって、低濃度の分析物を検出するセンサーの応答を強化する。共振スペクトル、すなわち空気中の位相角対励振周波数のプロットは、それぞれ102±0.05、970±0.05、および1810±0.05kHzにおいて、優勢な曲げモード共振ピークを示した。自己励振・自己検出型圧電カンチレバーセンサーの形状寸法を変えることにより、センサーの共振特性が強化された。対応する曲げ共振モードは、より高い周波数で起こり、より大きい位相角を有し、これは自己励振・自己検出型圧電カンチレバーセンサーの共振ピークが、より感度が高く、減衰がより少ないことを示唆した。
【0055】
1つの例示の実験において、自己励振・自己検出型圧電カンチレバーセンサーの質量変化感度を測定した。既知の質量のパラフィンワックスを、自己励振・自己検出型圧電カンチレバーセンサーのガラス表面に付加し、共振周波数の変化を用いて、g/Hzで表した質量感度を計算した。液体中での質量変化感度を、直接測定した;さらに、質量を付加する前後における共振周波数の変化に対する、既知の質量の比率も測定した。液体中で測定した共振モードの質量感度は、1.5×10−15g/Hzと決定された。
【0056】
圧電カンチレバーセンサーの空中浮遊分析物検出への適用
出願人は、気相における標的分析物の検出に関する、公表された情報を見出せなかった。本発明は、気相における標的分析物の、分析物をセンサー内の識別実体に結合することによる検出に関する。識別実体は、標的分析物への親和性を示す。生物学的識別実体の例は、ポリクローナルおよびモノクローナル抗体、単鎖抗体(scFv)、アプタマー(標的分子を検出するために特異的に開発された合成DNA)、組換えおよび天然ファージなどを含む。1つの態様において、例えば本明細書に記載されたような周波数変換法を用いる場合、検出器は、空中浮遊分析物の濃度を検出するための識別実体として、固定化抗体を使用する。固定化抗体は、識別実体として、空中検出のために用いるセンサー表面に取り付けられる抗体である。この種類の空中検出は、細菌、ウィルス、接合子嚢、プリオンおよび胞子を含む病原体などの生物学的物質、および化学物質などの非生物学的物質の、迅速で正確な検出を提供する。細菌、胞子などの生物学的脅威、および爆発性または毒性化学物質などの化学的脅威を検出することができる。
【0057】
本発明の1つの側面において、上記などの識別実体を用いた分析物の空中検出は、センサーの被覆表面などの識別実体を有するセンサーを、気流に暴露することにより実施される。気流は、分析物を含んでいても含んでいなくてもよい。気流が分析物を含まない場合は、検出は期待されない。しかし、気流中に分析物が存在する場合は、分析物は識別実体に結合し、センサーの特性に影響を与える。変化した特性は、現在センサーに結合している分析物の存在を検出する変換器を用いて、検出することができる。特に、変換器機構は、光学、周波数、キャパシタンス、電気導電性、曲げモード、または静的モードのカンチレバーを介して、操作することができる。変換器機構は、センサーの特性の変化を、分析物の識別抗体への結合の結果として決定することができる。その結果、変化した特性(すなわち、寸法、周波数、質量、キャパシタンス、電気導電性、曲げモード等)が検出および定量化される。一旦定量化されると、識別実体に結合した分析物の量は、当分野に知られた計算手段、例えばコンピュータ、組み込み型プロセッサまたはデジタルもしくはアナログ回路などを用いて、決定することができる。かかる変換器機構の1つは周波数であり、ここでセンサーの機械的共振は、分析物がセンサーの識別表面に結合すると変化する。周波数変換を用いた態様の例を下に示す。しかし、他の変換機構も、上に記したように可能である。
【0058】
空中浮遊分析物の検出用の周波数変換の1つの態様において、圧電励振ミリメートルサイズカンチレバー(PEMC)センサーは、その高い感度により、空中浮遊種の検出に有用であることが、本発明者らにより見出された。例えば抗体またはDNA分子などの認識実体を用いて調製したPEMC表面は、病原体、タンパク質または生体分子であってよい標的分析物に応答する。かかる事象はカンチレバーの質量変化を引き起こし、これは共振周波数の変化として現れ、適切な分析器によりモニタリング可能である。好適な分析器は、ロックイン増幅器、インピーダンスアナライザー、ネットワークアナライザーまたは発振回路を含んでよい。
【0059】
本出願において、空中浮遊病原体の検出のための技術が記載される。1つの側面は、標的有機体または分子を、空気中で、識別分子を含むPEMCセンサーに接触させて、標的有機体または分子の存在を検知する方法を含む。本発明の1つの利点は、これが、液体媒体中の標的有機体または分子を検出用に収集することなく、実施できることである。伝統的なアプローチでは、センサーを液体環境中に配置する。発振表面などの動的な検出表面は、望ましくない粒子状汚染物質の付着に抵抗することが知られている。PEMCセンサーは、気体流と接触している間振動しているため、化学結合付着のみが生じることができ、これによって、気流試料中の気体が運ぶ粒子状汚染物質による擬陽性を減少させるか、または取り除く。PEMCセンサーが、その動作によって検出における汚染物質の除外に特異性を提供できるため、この原理は本発明の利点となる。
【0060】
本発明の1つの態様において、低速度流域において流れる気流に対して、センサー表面の位置および/また向きを特定する。好ましくは、約0.01〜約30m/sの気流速度を検出に用いる。低速度流域は、標的種と結合用のセンサー表面の間に、増加した接触時間を提供する。標的種とセンサー表面の間の接触時間は、気流に相対的なセンサー表面の特定の位置および向きによっても、増大させることができる。好ましくは、センサー表面は気流に実質的に垂直に配置するが、ただし他の向きもまた可能である。胞子のセンサー上の抗原への結合親和性は、局所湿度に依存する可能性がある。湿度を10〜95%の範囲に維持することで十分な結合を提供し、95%の値で、優れた結合親和性を提供する。結合は0.01〜30m/sの気流速度範囲で観察されるが、この範囲の下限はより高い結合反応速度を示す。幾つかの態様においては、0.01〜10m/sの気流速度が許容可能な速度であった。
【0061】
本発明の方法は、空気1リットル当たり胞子40個という低い濃度での炭疽菌胞子を、液体またはゲルマトリックスベースの試料を調製する必要なしに直接測定することにより、検出することが実証された。
【0062】
図19A〜19Gは、本発明の方法において用いることができる、種々の圧電カンチレバーセンサーの態様を示す。本出願における図は、別に指示がない限り正確な縮尺ではなく、図は概念を表すことを指摘する。図19A〜19Gにおいて、各センサーは、圧電層14(Pと表示)、接着層18(圧電層と非圧電層の重なり部分の間に位置する)、および先端として伸びている部分を含む非圧電層16(NPと表示)から構成される。ベース20には、圧電層14が取り付けられる。ベース20は、一般に電極(図示されず)またはいくつかの他の類似の手段を、圧電層14への連結と共に有するが、ただし、電極が圧電層14に連結していれば、電極はベース20に連結する必要はない。電極は圧電層14の任意の位置に配置することができる。また、金、SiO2、受容体材料を固定化できる材料、および/または化学的センシングまたはバイオセンシングで用いるのに適した吸収材料で作られた結合パッドも存在してよい。当業者は、図19A〜19Gに記載されたデザインは可能な形状の一部に過ぎないことを理解する。したがって、これらのデザインの変形は本出願の範囲内である。例えば、センサーの非圧電部は、1つまたは多くの離散数において、圧電層の全幅またはその一部にわたって、圧電層に取り付けられてよい。
【0063】
カンチレバーまたはビーム(単純または複合)センサーは、PZT層のAC電気的励振により機械的に振動される。励振周波数が機械的共振周波数またはその高次モードに一致する場合、振動の大きさ(平衡からの偏向)は、それより低いかまたは高い周波数におけるよりも大きくなる。したがって、共振において、PZTは、非共振周波数におけるレベルより高い応力レベルを経験する。PZTの応力レベルはその長さに沿って変化し、モードの形状に依存する。モードの形状はまた、カンチレバーの曲げ係数にも依存する。例えば図19Aを参照すると、R部での曲げ係数は、S部での曲げ係数よりも大幅に大きい。励振電極はんだ点の位置が、高い応力の位置またはこれに近い位置であることは、これが電気インピーダンスによる測定においてより大きい信号を与えるために有利である。自由端カンチレバーまたはビームセンサーの感度は、高い共振周波数においてより高い。図19A〜19Gおよび図35〜46に描かれた種々の例示の構造は、60kHz〜6MHzの範囲において基本高次共振モードを実現するよう設計されたものである。離散的な非圧電層の位置は、一定の高次モードが強化され、強度において非曲げモードが低下するように、設計することができる。
【0064】
圧電層14は、チタン酸ジルコン酸鉛、マグネシウムニオブ酸鉛−チタン酸鉛固溶体、チタン酸ストロンチウム鉛、石英シリカ、圧電セラミックチタン酸ジルコン酸鉛(PZT)または圧電セラミック−ポリマー1−3繊維複合材から構成することができる。非圧電層16は、セラミック、金属、ポリマーならびに1種または2種以上のセラミック、金属およびポリマーの複合材から、例えば二酸化ケイ素、銅、ステンレス鋼、およびチタンから、構成することができる。非圧電層は、従来の圧電カンチレバーの非圧電層を構成するために用いられる任意の既知の材料を用いて、構成することができる。電極は、任意の好適な従来の電極であってよい。1つの態様において、電極は、種々の圧電カンチレバーセンサーの暴露環境に基づき、絶縁されても、絶縁されていなくてもよい。
【0065】
検出は、装置の発振(すなわち共振周波数)を測定し、測定した発振(共振周波数)をベースライン発振(共振周波数)と比較して、周波数シフトを決定することにより達成される。決定された周波数シフトは次に、センサーの圧電層または非圧電層の1つに溶着された識別実体に付着した分析物の存在を決定するために用いる。圧電層、非圧電層および識別実体の組み合わせはカンチレバーを構成し、これは、圧電層に取り付けられた電極によって励振されると振動する。
【0066】
本発明の1つの側面は、表面に直接または間接的に結合できる任意の分析物を測定するための、装置および方法である。分析物の結合は、質量変化または剛性変化のどちらかまたは両方を引き起こす。これらの変化は、共振周波数の変化として測定することができ、適切な分析装置、例えばロックイン増幅器、インピーダンスアナライザー、ネットワークアナライザーまたは発振回路などにより、モニタリング可能である。本発明の態様は、圧電カンチレバーの新規な形状デザインを含む。従来の圧電カンチレバーは、圧電層の全表面を非圧電層に取り付けることにより製造される。いくつかの従来の圧電カンチレバーにおいては、圧電層は1つの端で固定され、そのため圧電材料が励振されると、非圧電層が曲がって圧電材料に生じたひずみを適合させる。励振周波数が下にある機械構造の固有周波数に等しい場合、共振が起こる。この型の圧電カンチレバーセンサーは、ミリメートルサイズで約100kHzより低い周波数における動作に優れている。より高い周波数は、カンチレバーセンサーを非常に短く(1mm未満)することによってのみ、可能である。
【0067】
従来の圧電カンチレバーの他の種類は、圧電材料が1つの端で固定されていないものを含む。これはいわゆる「無固定圧電カンチレバー」である。無固定圧電カンチレバーは、100kHzを超える値においてその第1曲げモード共振を示し、一方従来の固定カンチレバーは、2〜60kHzにおいてその第1曲げモード共振を示す。第2曲げモード共振は一般に200kHzの範囲にあり、より高いモードは400kHz、800kHzおよび潜在的にはさらに高い周波数にも存在する。
【0068】
10より高いQ値を示す任意のモードは、実用上便利である。Q値は、共振ピーク周波数の、ピーク高さの中点における共振ピーク幅に対する比率である。しかし、高いQ値を示す全てのモードが、感度の高い検出を提供するわけではない。空気と水、および空気と真空の間の共振周波数の差は、感度の測度を与えるが、これは密度の差が共振周波数における周波数シフトを引き起こすからである。多くの圧電カンチレバーセンサーにおいて、空気から真空へと媒体を変化させると、センサーの個別の形状により、4〜25kHzの共振周波数変化を引き起こす。
【0069】
圧電層と非圧電層の相対的な長さおよび幅が感度を決定し、またセンサーが提供する周波数スペクトルのピークの形状も決定する。これは、本明細書に図として含まれている種々の圧電カンチレバーセンサーのスペクトルから見ることができる。
【0070】
本発明は、圧電カンチレバー表面に結合する、極小濃度の分析物の検出も可能とする。実施例には、病原体およびタンパク質の検出が、空気中低い濃度において示されている。さらに、PEMC表面の有機または無機の官能基に結合する、任意の分析物が検出可能である。したがって、化学的および生物学的剤の両方が、PEMCに基づくデバイスを用いて、空中環境中で検出可能である。
【0071】
本発明のカンチレバーについては種々の潜在的用途があり、例えば、炭疽菌などのバイオテロリズム剤の検出、空中浮遊病原体の検出、例えばトリニトロトルエン、ジニトロトルエンの存在などの爆発性マーカーの検出、および空中浮遊毒素の検出などである。本発明の圧電カンチレバーはまた、ピコグラムレベルでの生物学的実体の検出および、タンパク質−タンパク質相互作用の、静的および動的両方の状態での検出にも用いることができる。
【0072】
使用用途の例として、ある種の化学的コーティングに高い親和性を有する非生物学的実体が存在し、したがってPEMCまたはPEMCBセンサーなどの空中浮遊分析物センサーを、毒性または爆発性化学物質の検出などの非生物学的用途にも用いることができる。例えば、識別実体としてaSXFA−[ポリ(1−(4−ヒドロキシ−4−トリフルオロメチル−5,5,5−トリフルオロ)ペント−1−エニル)メチルシロキサン]のポリマーコーティングを用いて、2,4−ジニトロトルエン(DNT)を検出することができる。また、識別実体として分子的にインプリントされたポリマー(MIP)を用いて、トリニトロトルエン(TNT)などの爆発物および、2,4−ジリニトロトルエン(2,4−DNT)などの爆発痕跡物を検出することができる。
【0073】
図19Aは、無固定オーバーハング型の圧電カンチレバーセンサー(oPEMC)の態様710を示す。このセンサー710を「無固定」と呼ぶのは、非圧電層16がベースに取り付けられていないからである。このセンサーを「オーバーハング型」と呼ぶのは、非圧電層16が圧電層14の遠位端を越えて伸び、非圧電層16のオーバーハング部分を作り出しているからであり、この非圧電層16は圧電層からオーバーラップ領域18により隔てられている。ベース20は、圧電層14の近接端を保持する役割を果たす。
【0074】
本発明は、全ての好適な寸法を有するセンサーを包含する。例えば、圧電層14、非圧電層16およびオーバーラップ領域18のそれぞれは、0.1〜10mmの長さの範囲であってよい。圧電層14および非圧電層16の幅は、上記の長さに対して、0.1mm〜4mmの範囲であってよい。圧電層14の幅は、非圧電層16の幅と異なっていてもよい。
【0075】
典型的には、オーバーハング型圧電カンチレバーセンサー710の非圧電層16は、長さが約0.1mm〜約10.0mmの間、幅が約0.1mm〜約4.0mmの間である。圧電層14は、長さが約0.1mm〜約10.0mmの間、または幅が約0.25mm〜約4.0mmの間であってよい。層18は、層14と層16の間の重なりに相当し、オーバーハング型圧電カンチレバーセンサーの特定の構造に依存して、長さが約0.1mm〜約10mmの間、または長さが約0.1mm〜約5.0mmの間であってよい。
【0076】
オーバーハング型圧電カンチレバーセンサー710の幅は、約0.1mm〜約4.0mmの間であってよい。圧電カンチレバー710の厚さは、約0.1mm〜約1.0mmの間であってよい。図47の表1は、図19Aに相当するオーバーハング型PEMCデバイスの幾つかの寸法の例を示す。図47の表1において、長さの寸法a、b、およびcは図19Aの記号に対応する。
【0077】
本発明のオーバーハング型圧電カンチレバーセンサー710は、一般に、10〜120kHzにおいて第1曲げモード共振周波数モードピークを示し、120〜250kHzにおいて第2曲げモード共振周波数モードピークを示す。
【0078】
図19B〜19Fは、本発明による圧電励振カンチレバービームセンサーの種々の態様を示し、これらは成功してセンシング応答を提供することが実証されたものである。カンチレバービームセンサーは、図19Aのオーバーハング型センサーと全て同じ要素を含み、それに加えて第2ベース50も含み、この第2ベース50には、圧電層14と非圧電層16のうちの少なくとも1つが固定される。図19B〜19Dにおいて、非圧電層16は両方のベース(20、50)に取り付けられて、「ビーム」を形成する。図19Eにおいては、ビームは、圧電層14をベース20に取り付け、非圧電層16を接着層18を介して圧電層14に取り付け、および非圧電層16をベース50に取り付けて形成される。図19Fの構成717において、ビームは、圧電層14を両方のベース(20、50)に取り付けて形成される。
【0079】
圧電層および非圧電層の2つの端の固定は、3mmのガラスロッドまたはタングステンロッドを用いて行った。支持ロッドの曲げ係数がセンサーのビームよりはるかに大きい限り、良好なピーク形状が観察される。固定のための他の好適な方法もまた、用いることができる。
【0080】
図19B〜19Fのカンチレバービームセンサーのデザインは、直感的にはわかりにくく、何故ならば、当業者の期待としては、ビームの両端の取り付けは、ベース(20、50)への取り付けの結果としてカンチレバーの変位が制限されるために、劣化した応答を提供する、ということだからである。言い換えれば、従来のカンチレバーでは、カンチレバーの1つの端は自由端であり、すなわちベースに取り付けられず、これによりセンサーの応答を増加させるために、センシングの間のカンチレバーのより大きい変位を可能とする。
【0081】
図19Gは、浮動先端PEMC(ftPEMC)センサーと呼ばれる、図19Aのオーバーハング型形状についての代替の態様719を示す。図19B〜19Fのセンサーと異なり、図19Gの構造は1つのベース20のみの取り付けを有する。この構成および他の構成の性能結果について、以下にさらに記載する。
【0082】
図19B〜19Fの2つのベース(20、50)の「ビーム」構造に戻ると、圧電層での応力測定が、圧電層の変位の測定よりも、カンチレバーの両端がベース(20、50)に固定されたカンチレバー「ビーム」センサーの使用を許容することが見出された。さらに、本発明のカンチレバービームセンサーは、より高い基本モード(>100kHz)、流動条件のもとでの安定で頑健な性能および、低試料濃度の検出を可能とする優れた質量変化感度を提供する。
【0083】
本発明の1つの利点は、上記の図19A〜19Gのデザインが機械的に頑健であり、流動条件に対して性能の最小の劣化で耐えることである。第2の利点は、基本周波数が、カンチレバー構造の類似寸法のセンサーより3〜4倍高いことである。
【0084】
以下に記載する図20〜31は、本発明によるオーバーハング型圧電励振ミリメートルサイズカンチレバー(oPEMC)センサーの異なる態様を用いて行った種々の実験の結果を示す。図47の表1は、オーバーハング型PEMC(oPEMC)デバイスの寸法および共振周波数を示す。図2は、例えば図19Aに示すものなどのオーバーハング型圧電カンチレバーセンサーの第1の態様の、空気中で作動させた場合の代表的な共振スペクトルを示す(図47表1のoPEMC#1参照)。図2は、励振電圧100mVにおける、位相角対励振周波数のプロットを示す。第1共振周波数モードは一般に150〜200kHzで起こり、第2共振周波数モードは250〜300kHzで起こった。共振スペクトルは、高次特性ピークを、約980kHz、2.90MHzおよび4.60MHzにおいて、幅2mmの複合PZTカンチレバーについて示す。オーバーハングなしの、類似の無固定圧電カンチレバー構造と比べて、5MHzまでのベースラインはわずかに安定性が高く、観察された共振周波数の多くはより高かった。さらに、980kHzの特性ピークの性質係数(Q)は、オーバーハング型の態様について3倍高く、4.60MHzの特性ピークの性質係数(Q)は、2倍の係数で低かった。
【0085】
図21は、図19Aに示すオーバーハング型圧電カンチレバーセンサーの第2の態様の、空気中で作動させた場合の代表的な共振スペクトルを示す(図47表1のoPEMC#2参照)。図21は、励振電圧100mVにおける、位相角対励振周波数のプロットを示す。第1共振周波数モードは一般に150〜200kHzで起こり、第2共振周波数モードは250〜300kHzで起こった。このオーバーハング型圧電カンチレバーセンサーの第2の態様の共振スペクトルは、高次特性ピークを、約980kHz、2.90MHzおよび4.60MHzにおいて、幅2mmの複合PZTカンチレバーについて示す。オーバーハング部、すなわちオーバーハング型圧電カンチレバーセンサーのこの態様の図19Aの部分16は、oPEMC#1のオーバーハング部より3倍大きく、これは、第1共振周波数モードおよび850〜900kHzで起こった共振周波数モードにいくらかの減衰を引き起こした可能性がある。
【0086】
図22は、オーバーハング型圧電カンチレバーセンサーの第3の態様の、空気中で作動させた場合の共振スペクトルを示す(図47表1のoPEMC#3参照)。図22は、励振電圧100mVにおける、位相角対励振周波数のプロットを示す。第1共振周波数モードは一般に150〜200kHzで起こり、明白な第2共振周波数モードはなかった。オーバーハング型圧電カンチレバーセンサーのこの態様の共振スペクトルは、高次特性ピークを、約1.81MHzおよび1.95MHzにおいて、幅1mmの複合PZTカンチレバーについて示す。オーバーハングなしの無固定の構造と比べると、オーバーハング型構造の1.81MHzでの共振ピークは明示されるが、2.5MHzを超える他の全てのピークは減衰する。
【0087】
図23は、本発明によるオーバーハング型圧電カンチレバーの第4の態様の、共振周波数スペクトルを示す(図47表1のoPEMC#4参照)。図23の共振周波数スペクトルは、セラミックPZTで構成された圧電層の、幅1mmのオーバーハング型カンチレバーを用いて得た。スペクトルは、空気中で100mV信号を用いてカンチレバーを励振して得た。特性ピークは、250kHz、650kHz、850kHz、1.65MHzおよび4.65MHzにおいて得られた。
【0088】
図24は、本発明によるオーバーハング型圧電カンチレバーの第5の態様の、共振周波数スペクトルを示す(図47表1のoPEMC#5参照)。図24の共振周波数スペクトルは、セラミックPZTで構成された圧電層の、幅1mmのオーバーハング型カンチレバーを用いて得た。カンチレバーの部分(a)を短くすることにより、リストされた全周波数に対して減衰したピークを得た。スペクトルは、空気中で100mVの信号用いてカンチレバーを励振して得た。特性ピークは、200kHz、1.0MHz、1.55MHz、1.90MHzおよび4.50MHzにおいて得られた。さらに、この態様の寸法で、オーバーハング型圧電カンチレバーにより1.00MHzにおいて感度の高い共振モードが得られた。
【0089】
1つの態様において、圧電カンチレバーセンサーは、石英シリカおよび、圧電セラミックチタン酸ジルコン酸鉛(PZT)または圧電セラミック−ポリマー1−3繊維複合材のどちらかから、製造した。1つの態様において、非圧電層は従来の材料から、例えばセラミック、金属、ポリマーならびに1種または2種以上のセラミック、金属およびポリマーの複合材から、例えば二酸化ケイ素、銅、ステンレス鋼、およびチタンなどから構成した。
【0090】
図48の表2は、図47の表1にリストされた、異なる圧電カンチレバーセンサーに対する対応する共振ピークの品質係数(Q)を示す。品質係数は、共振ピーク周波数の、ピーク高さの中点におけるピーク幅に対する比率として決定した。そのため、品質係数は共振ピークの先鋭度の測度である。上記の実験において、オーバーハング型圧電カンチレバーセンサーの品質係数は、センサーが真空中から空気流環境までの異なる環境中に置かれた場合にも、大きく減少しないことが示された。
【0091】
オーバーハング型圧電カンチレバーセンサーのQ値は、ピークが検出されるそれぞれの周波数モードに依存して、一般に10〜70の範囲であることが観察される。オーバーハング型圧電カンチレバーセンサーが真空中、空気中、および流れを含む粘性の環境中で用いられる場合、一般にそのQ値は20%〜35%を超えて減少しない。
【0092】
ここで図19B〜19Fの構成の性能を考察する。図25は、図19Bの固定圧電励振ミリメートルサイズカンチレバービーム(aPEMCB)センサー711の、空気中で100mVで励振された場合の、位相角対励振周波数のプロット、すなわち代表的な共振スペクトルを示す。第1のピークは基本共振モードであり、これは一般に200〜300kHzで起こった。第2のピークは第2共振モードであり、これは通常、700kHz〜1MHzの周波数範囲である。aPEMCB共振スペクトルは、電極をインピーダンスアナライザ(Agilent, HP4192A)に接続することにより測定した;該インピーダンスアナライザは、励振電圧100mVで目的の周波数範囲におけるインピーダンス、位相角および振幅比の連続測定のために、パーソナルコンピュータにインターフェースを介して接続されたものである。
【0093】
図26は、図19Cの浮動圧電励振ミリメートルサイズカンチレバービーム(fPEMCB#1)センサー712の、空気中で100mVで励振された場合の、位相角対励振周波数のプロットを用いた共振特性を示す。一般に、基本共振モードは200〜250kHzで起こり、第2モードの周波数は800kHz〜1MHzで起こった。各共振ピークに対する品質係数を、図50の表4に挙げる。
【0094】
図27は、図19Dの固定バイモルフ圧電励振ミリメートルサイズカンチレバービーム(abPEMCB#1)センサー713の、空気中で100mVの励振電圧の場合の、位相角対励振周波数のプロットを用いた、代表的な共振スペクトルを示す。基本共振周波数は200kHzで起こり、第2モードは700kHzで起こった。全センサーの構造種類についての物理的寸法および品質係数は、それぞれ表3および表4に示される。
【0095】
図28は、図19Eのオーバーハング型ビームPEMCB(oPEMCB#1)センサー715の、空気中で100mVの電圧で励振された場合の、共振スペクトルを示す。図19B、19C、19Dおよび19Eの固定、浮動、および固体バイモルフおよびオーバーハング型のPEMCセンサーの、寸法および共振周波数はそれぞれ、図49の表3に一覧表示されている。ここで、PEMCBセンサーの形状を変化させることにより、共振周波数のピーク位置は特定の要求に対して調節できることがわかる。したがって、圧電層14および非圧電層16の位置、およびこれらがビームベース20、50に固定か無固定か、およびどの材料でビームを構成するかの選択により、生物学的および化学的検出の決定のための広い範囲の共振周波数の選択が可能となる。
【0096】
図49の表3は、図25〜28で用いたPEMCBセンサーのmm単位で表示した物理的寸法および、空気中での基本モードの共振周波数を示す。PZTおよびガラスの長さは、それぞれ図19B〜19Fにおける層14および16の寸法である。幅および厚さは、各層の寸法である。PEMCBセンサーは、圧電セラミックチタン酸ジルコン酸鉛(PZT)および石英シリカから製造された。
【0097】
ここに記載されたベース2つのカンチレバービームデバイスからの、異なる形状を有する別の種類のPEMCセンサーを図19Gに示し、これも製造して試験した。新しい形状719である、浮動先端PEMCセンサー(ftPEMC)は、厚さ127μmのPZT単シートおよび厚さ180μmの石英カバー四角形を用いて製造した。用いたPZT層は、図19Aのベースセンサープラットフォームに用いたものと同じである。カンチレバーの自由端は、1.50±0.05×1±0.05mm2(長さ×幅)のガラス層を、4±0.05×1±0.05mm2(長さ×幅)のPZT層の1端に、非導電性接着剤で結合して設計した。もう1つの端においては、長さ1.70±0.05mmのPZT層をガラス管内にエポキシ樹脂接着した。その結果、カンチレバーの自由端は、0.8mmの暴露されたPZT層を有する。上部および下部電極は、長さ1.7mmのPZT層上に、エポキシ接着の前に、BNCカプラーにはんだ付けされた30ゲージの銅製ワイヤを用いて作製した。カンチレバーの自由端のPZT層は、厚さ8μmのポリウレタン層で絶縁した。1.50±0.05×1±0.05mm2のガラス層は、抗体固定化および抗原検出用の表面を提供する。
【0098】
上記の任意のPEMCまたはPEMCBデバイスは、抗体またはDNAなどの識別実体でPEMCまたはPEMCBデバイスが被覆された場合には、センサーを形成することができる。適切な被覆により、得られるセンサーの被覆は空中浮遊病原体、空中浮遊タンパク質または空中浮遊生物学的剤などの標的分析物を引き寄せ、これに結合する。1つの態様において、空中浮遊炭疽菌(BA)胞子の直接検出を、固定化BA抗原で被覆したミリメートルサイズPZTカンチレバーセンサー(PEMC)を用いて検討した。BAの被覆PEMCセンサーへの付着は、付加されたBAの質量によるPEMCデバイスでの周波数変化として検出されるが、これは、付着したBAが質量に影響を及ぼし、したがってカンチレバーデバイスの機械的共振に影響するためである。
【0099】
1つの態様において、実験装置は、PEMCセンサーをそのガラス表面を気流に向けて垂直に浮遊させた、水平管を含む。石英表面はシラニル化され(silanylated)、続いて病原体BAに特異的なウサギ抗BAが固定化され、空気中に42〜278,000胞子/Lを含む流れる気流(11cm/s)に暴露された。BAは、軸流噴霧器を用いてセンサーの上流に導入した。噴霧器中のBA溶液の濃度は、コールターカウンターMultisizer IIを用いて測定した。センサーは、2×5mmのホウケイ酸ガラスを0.5mmオフセットでラミネートした2×5mmのPZTから製造し、非導電性エポキシベースに固定した。
【0100】
図29Aは、空中浮遊炭疽菌(BA)をPEMC型センサーに流して空中浮遊BAを検出するのに用いる装置100を示す。湿度ゼロの状態に調整した供給空気110(A0)は、2つの流れに分割される。1つの流れは空気弁110(A1)を用いて、噴霧器121に脱イオン化した水中の既知の濃度のBAを供給する。噴霧器121は、約5μmの液体粒子を生成する。低ずり噴霧器を用いて、BA胞子が噴霧器中を流れる際の損傷を防ぐ。液体粒子は、2”パイプを通して約1〜200lpmに調節可能な調節式空気弁115(A2)から作り出される空気により、運ばれる。図29Aの構成において、2つの流れはミキサー123で混合され、エアロゾル化されたBAを1m/sの速度で運ぶが、これより高い速度も可能である。PEMCセンサーは、図29Bに示すように、「T型」暴露管アセンブリ125に垂直の様式で挿入され、インピーダンスアナライザ131および共振周波数データを30秒毎に収集するパーソナルコンピュータに、インターフェイスを介して接続される。流れるバイオエアロゾルの湿度および温度は、連続してモニタリングする。周期的に、出口の流れを市販のSASS2000空気捕集装置140を用いてサンプリングし、該装置は5mlの液体試料を提供する。これらの試料は、別の装置のPEMCセンサーを用いて分析するか、またはその粒子サイズと分布を、コールターカウンターを用いて決定する。SASS2000空気捕集装置は、RS−232インターフェイスとパーソナルコンピュータ150を用いて、モニタリングする。
【0101】
図29Bのフローセル125は、気体流入力部1251、気流ボディ部1252、排気開口部1253、およびセンサー搭載部1253を含む。センサー搭載部の中のセンサー1254は、垂直方向に調節可能に配置することができ、ボディ1252を通る気流中へのセンサーの浸透深さが調節される。1つの態様において、センサーはカンチレバーセンサーの識別実体を気流方向に直角に暴露するよう配置され、識別実体の、気流中の要素への暴露を最大化する。
【0102】
図29Aの構成を用いて、センサーの定常状態周波数応答を、初めに湿った空気(RH=85±3%およびT=23±0.3℃)を2.4lpmの流速で流すことにより、実現した。噴霧器の充填は4mL中1000万個の胞子であり、これを15分間噴霧すると、278,000胞子/空気1Lの気相濃度を生成する。PZTカンチレバーの周波数は、その質量および温度、および周辺気体の流体力学特性の関数である。空中浮遊BAに暴露されると、共振周波数は、被覆されたカンチレバーデバイスへの胞子の付着により700Hzに減少した。検出後にセンサーをPBSに浸し、付着したBAを低pH緩衝液を用いて解放することにより、BA付着を確認した。胞子の解放から得られる周波数変化は350kHzであった。温度および湿度効果による周波数変化は、1℃当たり60Hz、および相対湿度(RH)1%当たり2Hzであった。
【0103】
PEMCセンサーは、検出に用いる構造および振動モード依存して、10フェムトグラムの感度を有することができる。図30Aの結果については、2つのセンサーを用いた。センサー1は、278,000胞子/空気1L(湿度95%、24C)の濃度で流れるBA胞子に暴露された場合に、760Hzの応答を与えた。同じ胞子濃度を用いて、センサー2はほとんど同じ応答である760Hzシフトを与えた。図30Aはまた、同じモードを検出に用いた場合に、類似構造の異なるセンサーによる別のランの間の、優れた再現性を示す。このように、BA胞子の定量的および再現可能な、成功した検出が観察された。
【0104】
図30Bは、4つのセンサーを暴露した結果を示す。センサー1(1006)およびセンサー2(1008)は、BA胞子を検出する識別実体を用いて調製した。対照センサー1002および1004は、同じ識別実体を用いて同様に調製した。図30Bは、センサー1およびセンサー2の間の、1Lの気体当たり278,000胞子の環境中で胞子を検出する場合の、結果の整合性を示す。センサープロット1002は、0.2〜0.6μmサイズのケイ酸アルミニウム粒子である無機粒子の、対照の注入に対するセンサー応答を示す。センサープロット1002は、予想されたように、実質的な応答がないことを示す。センサープロット1004は、清浄な空気環境に対するセンサー応答を示す。予想されたように、実質的な応答はないことを指摘する。このことは、PEMC/PEMCBセンサーを用いる分析物の検出は、用いる識別実体に非常に特異的であり、したがってそのように構成されたセンサーは、非標的物質に対して感度が低いことを証明する。
【0105】
PEMCセンサーは、質量、温度および流体密度の変化に応答する。システムの温度、湿度(質量および密度効果)および圧力(密度)の変動は、病原体の検出をマスクして隠し得る。PEMCセンサーのデザインは、これらのマスク効果を最小化する。PEMCデバイスの周波数は、胞子が噴霧器からセンサーまで移動する時間の間に応答したことを指摘する。BAを検出するための時間は、2分のオーダーである。
【0106】
上に述べたように、PEMCセンサーへのBA付着の検出の確認は、低pH緩衝液中での解放により行った。顕微鏡による直接観察も確認に用いた。低pH緩衝液による確認において、付着の解放に対する比率2:1は、空気対液体質量変化に対する他の報告と整合する。BAのエアロゾル化の確認は、噴霧器が供給する粒子サイズの解析および、図29Aの構成において空気捕集装置(SASS200)により捕捉された排気の解析を介して行った。SASS2000は、注入された空中浮遊BAの約30%を捕捉する。検出の確認結果は、図31に示す。
【0107】
図30Aに示す実験を行った後、1Lの空気試料当たり278,000胞子に暴露されたセンサーを、解放緩衝液(pH2.2)に挿入し、共振周波数を測定した。このpHにおいて、抗原はセンサー表面から解放され、質量の減少は共振周波数を増加させ、周波数の減少が確かにBAの付着によるものであることを確認した。この確認を図31に示す。
【0108】
BA付着のさらなる確認は、顕微鏡での直接検査により行った。図32の走査型電子顕微鏡写真は、空中浮遊炭疽菌の検出実験の1つにおいて用いた、壊されたカンチレバーを示す。センサーは、SEMの台座への搭載を可能とするために壊され、次に顕微鏡分析に用いられた。図32の上の図は、下の図に示されたセンサー表面の領域内での検出に用いられた炭疽菌胞子の存在を示す。これらの顕微鏡写真は、炭疽菌抗原が、センサー表面上に化学的に固定化された抗体に結合することを示す。
【0109】
先に指摘したように、PEMCセンサーは、気体流と接触している間振動しており、化学的結合による付着のみが起こり得て、これにより、気流試料中の気体が運ぶ粒子による汚染からの擬陽性を低減するかまたは取り除く。気相実験を、0.2〜6.0ミクロンの粘土粒子を不活性の汚染物として用いて行った。汚染物への暴露からは、センサー出力に何の変化も観察されなかった。これはまた、不活性の汚染物はPEMC表面にその動作中付着しないことも確認する。
【0110】
したがって、本発明のセンサーが、バイオテロ剤の検出、空中浮遊病原体の検出、DNTなどのTNTのマーカーの検出、空中浮遊毒素の検出、および好適に調製されたPEMCまたはPEMCB表面に結合する任意の他の標的分析物の検出に用いることができることが、例を用いて理解され示される。本発明のセンサーはまた、複数のセンサーが1つのデバイスに、複数の異なる分析物を同時に検出するために配置される、センサーアレイに実装することもできる。この方式で、本発明のセンサーは、例えば、気体中の未知の種を同定するため、または気体中の複数の異なる分析物の存在を示すために、用いることができる。
【0111】
上に指摘したように、検出は湿度に影響される。特に、非常に低い湿度は結合親和性に悪影響を及ぼす。したがって、空中浮遊分析物センサーに付随して給湿を含むことが有利である。図33は、図29Bの空中センサーを用いた構成を示す。この態様において、気体ポンプ305は空気注入口を有し、チャンバー、容器、または部屋などの空気試料から空気を取り込み、取込み空気を給湿機310にポンプ注入する。給湿機310は、ポンプ注入された空気にある量の湿度を加えて、フローセル125のPEMCまたはPEMCBセンサーが、取り込み空気に含まれる標的分析物と良好に反応するようにする。PEMC/PEMCBフローセル125は次に、空気315を安全な場所に排気する。フローセル125のセンサーは、インピーダンスアナライザ131およびフローセルから共振周波数データを収集するパーソナルコンピュータ135を用いて測定される。図33は、フローセル内のPEMC/PEMCBセンサーの、分析物の空中検出のための簡易な適用である。
【0112】
図34は、本発明の側面を含む方法のフロー図を示す。方法は、空中浮遊分析物の、PEMC型センサー(PEMCおよびPEMCB型を含む)を用いた検出に関する。方法は、PEMC型センサーをステップ2120において提供することから開始される。これらのセンサーは、図19A〜19Gに示す任意の種類および変形を含むことができる。これらの種類は、図19Aおよび19Gに示す1つのベースのカンチレバー型、図19B〜19Dに示す非圧電ビームを有する2つのベースのビーム型センサー、図19Fに示す圧電ビームを有するビーム型センサー、および図19Eに示す重なった層構造のものを含む。
【0113】
次に、エアロゾル化された標的分析物を、ステップ2122において、気流中でセンサーに渡す。ここで、分析物を引き寄せる識別実体が、分析物を有する気流に直角に配置されているのが好ましい。気流への暴露により、識別実体は標的分析物を捕捉することができる。次に、PEMCセンサーを、ステップ2124で電極を介して励起して発振させる。カンチレバーアセンブリまたはビームアセンブリの発振周波数は、識別実体が収集した分析物を含む、アセンブリの質量に依存する。センサーの発振周波数(すなわちカンチレバーアセンブリの共振周波数)は、ステップ2126で測定する。測定されたカンチレバーアセンブリの発振周波数は、次にステップ2128で、カンチレバーアセンブリの固有(共振)ベースライン周波数と比較する。かかる比較は、パーソナルコンピュータ、内蔵プロセッサ、アナログまたはデジタル回路を含む計算手段、または手計算により行うことができる。
【0114】
周波数シフトは、決定ステップ2130で検出する。周波数シフトがステップ2132でのように検出されない場合は、次に、識別実体上に分析物が存在しないとの決定がなされる。これは、気流試料が純粋であるか、または識別実体が気流中のいかなる分析物とも適合しない場合に起こる。周波数シフトが検出された場合は、ステップ2134において標的分析物が検出されたことが決定される。さらに、分析物の具体的な量(すなわち、識別実体上に付着した分析物の質量)が、ステップ2136で決定される。このステップは、周波数シフトの大きさを調査し、この大きさを、PEMCセンサーの共振周波数を変化させるのに必要な分析物の質量と相関させることにより行う。分析物の液体ベースのサンプリングの場合に必要な、特別の調製は行われなかったことを指摘する。また、上記の方法には、液体ベースの分析物検出と比べて、特別の濃縮段階または濃縮段階は含まれない。
【0115】
分析物の検出において品質の対照またはさらなる精度を提供するために、図33には示されていないが、対照センサーと分析物を検出する測定センサーとの間で比較がなされる。例えば、対照センサーは、標的分析物に対する識別実体を有さないことを除いて、測定センサーと同一であるのが好ましい。測定センサーと同じ気流に暴露された場合、対照センサーの共振周波数変化は、測定センサーの共振周波数から区別でき、正確な結果を提供する。
【0116】
追加のセンサー構成
図35〜47の全ての構成は、気体または液体媒体中の分析物を検出するために用いることができるセンサーの構成に、図19A〜19Gの構成同様に有用である。したがって、図35〜47の構成の用途は、本明細書において、空中浮遊化学物質または生物製剤の検出のために記載されたものと同様である。図35〜47は、図19A〜19Gのものと、いくつかの特性を共有する。例えば指示されている場合には、ベース要素20が存在して、ここに圧電14(P)型の要素または非圧電16型の要素のどちらかが取り付けられる。接着層18は、P型層14をNP型層16から隔てる。図35〜47には、点30において圧電14型の要素の種々の位置に接続されて、カンチレバー構造またはビーム構造を励振させる、電極28が示される。図35〜47は、PEMCおよびPEMCBデバイスと共に実装可能な広い範囲の構成を示す。それらの各々の簡単な説明は以下である。
【0117】
図35は、NP部16がP部14と接触している、PEMCまたはPEMCBセンサーの構成を示す。NP層16(TNP)の厚さは、NP層14の長さに沿って可変であることができ、TNPは高感度センサーを支持するように設計できる。この構成において、NP層14のノッチ部の曲げ係数は、NP層14のより厚い部分のそれよりも小さい。PおよびNP層を含む自由端のカンチレバーアームのみが示されているが、図35の構成は、中心線A−Aについて鏡像の形に複製してもよい。図35のこの鏡像複製は、ビーム型(PEMCB)センサーの対称性を示す。図35〜47には中心線が描かれている幾つかの例があり、ここで、形状描写は、自由端カンチレバーまたはビーム型構造のセンサーのどちらかであることができる。さらに、電極ワイヤ28、および端子30の配置およびノッチの幅についての基本情報全ては、この構成および他の全ての構成に適用される。
【0118】
図36は、2層のNP16を示す:1つは上に、1つは下にあり、NP1の曲げ係数(EI)がNP2のそれと同じではない場合に、効果的に用いることができる。ここで、図36のNP1およびNP2の名称は、2つのNP層が形状および材質において異なってよいことを示す。例えば、NP1はNP2より小さいか、または異なる形状であることができる。またNP1はガラスで作ることができ、一方NP2はセラミックで作ることができる。図35の場合と同様に、中心線A−Aについての鏡像は、ビーム構造を生成する。この場合、距離Xは0以上であり、Pが鏡像のアンカーに連続的であるか、または2つに別れた部分であることを意味する。X>0の場合、Pの一方または両方の部分を励振できるが、しかし後者の場合は、2つの励振は同期することができる。図37は、2つの側面を除いて図36と同様の構成を示す。図37において、P1およびP2を有することは対称軸を作るため、NP1=NP2である。A−Aについての鏡像はビーム構造を作り出す。この場合、Xは0以上である。これは、Pが鏡像のアンカーについて連続的であるか、または、2つに別れた部分であることを意味する。X>0の場合、Pの一方または両方の部分を励振できるが、しかし後者の場合は、2つの励振は同期させるのが好ましい。
【0119】
図38は、NP16型材料の追加部分を除き、図19Aと同様の構成を示す。この構造の図19Aに対する利点は、共振周波数ピーク位置についてよりよい制御が実現でき、望ましくないモードの減衰に構成が効果的でありえることである。NP1(16)は、NP2(16)と、所望の特性に依存して、同じかまたは異なることができる。図38の自由端カンチレバー構造は、NP2の遠位端をベース要素に単純に固定することにより、ビーム構造に変換できる。また、図38でNP2と記された部分は単に、P型材料の部分から電極を取り除き(レーザー切断、化学エッチングなど)、P型材料の励振不能な部分を用いることにより作製できることも指摘する。
【0120】
図39は、NP1の追加を除き、図19Aと同様の構成を示す。ここでNP1は、P型層の代わりにベース20に結合している。この構成は改善された信号をもたらし、なぜならば、図19Aの構成とは異なり、Pの近接端には束縛がなく、その信号エネルギーの幾分かは散逸せず、そのためより大きな信号を発生するからである。別の言い方をすれば、図19Aからの信号エネルギーの幾分かは、近接端が束縛されているために失わる可能性がある。図39の構成は、図19Aのそれに対して改善を示す。図35〜37の構成におけると同様に、中心線A−Aについて鏡像を付加することにより、ビーム構造を作製することができる。
【0121】
図40は、PおよびNP領域を逆にしたものを付加し、P型の層14を付加したことを除いて、図19Fと同様の構成を示す。この構成は改善された信号をもたらすことができ、なぜならば、Pの近接端は、その信号エネルギーの幾分かが散逸しないように、束縛されていないからである。したがって、より大きな信号が生成される。図41は、NP1を加えたことを除き、図19Eと同様の構成を示す。この構成は改善された信号をもたらすことができ、なぜならば、Pの近接端は、その信号エネルギーの幾分かが散逸しないように、束縛されていないからである。したがって、より大きな信号が生成される。図42は、NP層の曲げ係数(EI)が長さLの関数として変化することを除き、図19Gと同様の構成を示す。このパラメータを変化させることにより、電極位置に集中する応力を増加させることによる、感度の強化が達成される。これを実現する1つの実際的な方法は、図43に示すように、NP層を複数の分離した部分から構成し、これらの部分は、空の空間または低係数の代替材料である隣接部分に沿って、その幅が異なることができる。ビーム構造は、図42または図43のどちらかにおいて、A−Aについて鏡像を加えることにより、作製される。
【0122】
図44は、上部NP層が、長さの関数として変化する曲げ係数(EI)と、長さの関数として変化する下部層を有すること除き、図36と同様の構成である。これは、図43の効果的な鏡像であるが、しかし、下部層は上部層と異なっており、共振構造を作っている。図44において、上部および下部層は、P層が図37に示すようにサンドイッチ構造である場合にのみ、同一であることができる。図45は、電極の点に応力を十分に集中させて、高感度の応答を生成する構成である。しかし、これはNP16の位置のために、さらに安定な応答を与える。ビーム構造は、A−A中心線について鏡像化することにより作製することができる。図46は、短縮したベース20のために、製造性について有用な構造である。しかし、これはより多くの望ましくない振動モードを提供する。ビーム構造は、A−A中心線について鏡像化することにより作製することができる。
【0123】
本発明の多くの特性および利点が、発明の構造および機能の詳細と共に前述の説明に示されているが、この開示は説明のみであり、特に、部品の形状、寸法および配置の事項における変更を、本発明の原理内で、添付のクレームが表現されている用語の広い一般的な意味により指示される全ての範囲まで、詳細にわたって作製できることが理解されるべきである。
【特許請求の範囲】
【請求項1】
以下のステップを含む、空中浮遊標的分析物を検出するための方法:
ミリメートルサイズのセンサーを提供すること、ここで該センサーは、
第1端および第2端を有する圧電層、ここで第1端は第1ベースに隣接して取り付けられており、
第1端および第2端を有する非圧電層、ここで非圧電層の一部は圧電層と重なりこれに取り付けられており、
非圧電層に付随する識別実体、ここで圧電層、非圧電層、および認識実体の組み合わせは、カンチレバー部を構成し、および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる、
を含み;
前記ミリメートルサイズのセンサーを気流中に実装すること;
カンチレバーの識別実体を、気流中の標的分析物に暴露すること;
カンチレバーの発振周波数を測定すること;および
測定した発振周波数をベースライン発振周波数と比較して、識別実体上の標的分析物の存在を示す周波数シフトを決定すること。
【請求項2】
ミリメートルサイズのセンサーを提供することが、圧電層が、直線状に配置された圧電部と非圧電部の両方を含む、センサーを提供することをさらに含む、請求項1に記載の方法。
【請求項3】
ミリメートルサイズのセンサーを提供することが、圧電層が、接着剤で隔てられた2つの圧電層を含む、センサーを提供することをさらに含む、請求項1に記載の方法。
【請求項4】
ミリメートルサイズのセンサーを提供することが、非圧電層が、間隔を空けて直線状に配置された複数の非圧電部を含む、センサーを提供することをさらに含む、請求項1に記載の方法。
【請求項5】
識別実体上に存在する標的分析物の量を決定すること;
をさらに含む、請求項1に記載の方法。
【請求項6】
ミリメートルサイズのセンサーを提供することが、識別実体が、抗体、DNA分子、アプタマー、ファージおよび生化学的試薬からなる群の1つから選択され、および選択物が、天然および合成により構成されたものからなる群の1つである、ミリメートルサイズのセンサーを提供することをさらに含む、請求項1に記載の方法。
【請求項7】
識別実体が、空中浮遊分析物を認識し結合する抗体である、請求項6に記載の方法。
【請求項8】
空中浮遊分析物が、抗体と結合することによりカンチレバーセンサー表面に化学的に固定化される、請求項7に記載の方法。
【請求項9】
カンチレバーの識別実体を気流中の標的分析物に暴露することが、識別実体を、気流中の生物学的物質および化学物質からなる群の1種に暴露することを含む、請求項1に記載の方法。
【請求項10】
生物学的物質が、炭疽菌胞子である、請求項9に記載の方法。
【請求項11】
複数のミリメートルサイズのセンサーをセンサーアレイ内に提供すること、ここでアレイ内の複数のミリメートルサイズのセンサーの各々は気流に暴露されて、少なくとも1種の分析物を検出する、
をさらに含む、請求項1に記載の方法。
【請求項12】
少なくとも1種の分析物が、複数の周波数シフトを測定することにより検出され、1つの周波数シフトは提供されたミリメートルサイズのセンサーの各々に対するものである、請求項11に記載の方法。
【請求項13】
ミリメートルサイズのセンサーを気流中に実装することが、ミリメートルサイズのセンサーを気流に対して実質的に直角に実装することを含む、請求項1に記載の方法。
【請求項14】
気流が、0.01〜10m/sの範囲である、請求項13に記載の方法。
【請求項15】
カンチレバーの識別実体を気流中の標的分析物に暴露することが、識別実体を標的分析物に、液体媒体中で標的分析物を収集することなく暴露することを含む、請求項1に記載の方法。
【請求項16】
カンチレバーの発振周波数を測定することが、標的分析物への暴露後にカンチレバーが振動したところの共振周波数を測定することを含む、請求項1に記載の方法。
【請求項17】
ミリメートルサイズのセンサーを提供することが、非圧電層の第2端が第2ベースに取り付けられているミリメートルサイズのセンサーを提供することを含む、請求項1に記載の方法。
【請求項18】
以下のステップを含む、空中浮遊標的分析物を検出するための方法:
ミリメートルサイズのセンサーを提供すること、ここで該センサーは、
第1端および第2端を有する第1非圧電層、ここで第1端は第1ベースに隣接して取り付けられており、
第1端および第2端を有する圧電層、ここで圧電層の一部は第1非圧電層に直線状の配置で取り付けられており、
第2非圧電層に付随する識別実体、ここで第2非圧電層は圧電層に重なりこれに取り付けられており、ここで圧電層、第1および第2非圧電層、および認識実体の組み合わせは、カンチレバー部を構成し、および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる、
を含み;
前記ミリメートルサイズのセンサーを気流中に実装すること;
カンチレバーの識別実体を、気流中の標的分析物に暴露すること;
カンチレバーの発振周波数を測定すること;および
測定した発振周波数をベースライン発振周波数と比較して、識別実体上の標的分析物の存在を示す周波数シフトを決定すること。
【請求項19】
以下のステップを含む、空中浮遊標的分析物を検出するための方法:
ミリメートルサイズのセンサーを提供すること、ここで該センサーは、
第1ベースに取り付けられた第1端および第2ベースに取り付けられた第2端を有する非圧電層、ここで非圧電層は、第1ベースと第2ベースの間にビームを形成し、
非圧電層に接着された第1圧電層、
非圧電層および圧電層からなる群の1つに付随する識別実体、ここで、圧電層、ビーム、および識別実体の組み合わせは、カンチレバー部を構成し;および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる、
を含み;
前記ミリメートルサイズのセンサーを気流中に実装すること;
カンチレバーの識別実体を、気流中の標的分析物に暴露すること;
カンチレバーの発振周波数を測定すること;および
測定した発振周波数をベースライン発振周波数と比較して、識別実体上の標的分析物の存在を示す周波数シフトを決定すること。
【請求項20】
ミリメートルサイズのセンサーを提供することが、非圧電層が、直線状に配置された圧電部と非圧電部の両方を含む、センサーを提供することをさらに含む、請求項19に記載の方法。
【請求項21】
識別実体上に存在する標的分析物の量を決定すること;
をさらに含む、請求項19に記載の方法。
【請求項22】
ミリメートルサイズのセンサーを提供することが、識別実体が、抗体、DNA分子、アプタマー、ファージおよび生化学的試薬からなる群の1つから選択され、および選択物が、天然および合成により構成されたものからなる群の1つである、ミリメートルサイズのセンサーを提供することをさらに含む、請求項19に記載の方法。
【請求項23】
識別実体が、空中浮遊分析物を認識し結合する抗体であり、カンチレバーセンサー表面に化学的に固定化されている、請求項22に記載の方法。
【請求項24】
カンチレバーの識別実体を気流中の標的分析物に暴露することが、識別実体を、気流中の生物学的物質および化学物質からなる群の1種に暴露することを含む、請求項19に記載の方法。
【請求項25】
生物学的物質が、炭疽菌胞子である、請求項24に記載の方法。
【請求項26】
複数のミリメートルサイズのセンサーをセンサーアレイ内に提供すること、ここでアレイ内の複数のミリメートルサイズのセンサーの各々は、気流に暴露されて、少なくとも1種の分析物を検出する、
をさらに含む、請求項19に記載の方法。
【請求項27】
気流が、0.01〜10m/sの範囲である、請求項19に記載の方法。
【請求項28】
カンチレバーの識別実体を気流中の標的分析物に暴露することが、識別実体を標的分析物に、液体媒体中で標的分析物を収集することなく暴露することを含む、請求項19に記載の方法。
【請求項29】
カンチレバーの発振周波数を測定することが、標的分析物への暴露後にカンチレバーが振動したところの共振周波数を測定することを含む、請求項19に記載の方法。
【請求項30】
ミリメートルサイズのセンサーを提供することが、ビーム上に位置する第2圧電層を有し、第2圧電層が第1圧電層から隔てられている、ミリメートルサイズのセンサーを提供することを含む、請求項19に記載の方法。
【請求項31】
以下のステップを含む、空中浮遊標的分析物を検出するための方法:
ミリメートルサイズのセンサーを提供すること、ここで該センサーは、
第1ベースに取り付けられた第1端および第2ベースに取り付けられた第2端を有する圧電層、ここで圧電層は、第1ベースと第2ベースの間に少なくともビームの一部を形成し、
圧電層に接着された非圧電層、
非圧電層および圧電層からなる群の1つに付随する識別実体、ここで、圧電層、ビーム、および識別実体の組み合わせは、カンチレバー部を構成し;および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる、
を含み;
前記ミリメートルサイズのセンサーを気流中に実装すること;
カンチレバーの識別実体を、気流中の標的分析物に暴露すること;
カンチレバーの発振周波数を測定すること;および
測定した発振周波数をベースライン発振周波数と比較して、識別実体上の標的分析物の存在を示す周波数シフトを決定すること;および
識別実体上に存在する標的分析物の量を決定すること。
【請求項32】
ミリメートルサイズのセンサーを提供することが、圧電層が、接着剤で隔てられた2つの圧電層を含む、センサーを提供することをさらに含む、請求項31に記載の方法。
【請求項33】
ミリメートルサイズのセンサーを提供することが、非圧電層が、間隔を空けて直線状に配置された複数の非圧電部を含む、センサーを提供することをさらに含む、請求項31に記載の方法。
【請求項34】
ミリメートルサイズのセンサーを提供することが、識別実体が、抗体およびDNA分子からなる群の1つから選択される、ミリメートルサイズのセンサーを提供することをさらに含む、請求項31に記載の方法。
【請求項35】
識別実体が、空中浮遊分析物を認識し結合する抗体であり、カンチレバーセンサー表面に化学的に固定化されている、請求項31に記載の方法。
【請求項36】
カンチレバーの識別実体を気流中の標的分析物に暴露することが、識別実体を、気流中の生物学的物質および化学物質からなる群の1種に暴露することを含む、請求項31に記載の方法。
【請求項37】
生物学的物質が、細菌、ウィルス、接合子嚢、プリオンおよび胞子からなる群の1種である、請求項36に記載の方法。
【請求項38】
生物学的物質が、炭疽菌胞子である、請求項36に記載の方法。
【請求項39】
以下を含む、空中浮遊標的分析物を検出するための装置:
ミリメートルサイズのセンサー、ここで該センサーは、
第1端および第2端を有する第1層、ここで第1端は第1ベースに隣接して取り付けられており、
第1端および第2端を有する第2層、ここで第2層の一部は第1層と重なりこれに接着剤で取り付けられており、ここで第1層は、圧電材料および非圧電材料からなる群から選択され、第2層は第1層とは異なる材料であり、
第2層に付随する識別実体、ここで第1層、第2層および認識実体の組み合わせは、カンチレバー部を構成し、および
圧電材料に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる、
を含み;
前記ミリメートルサイズのセンサーを含む、暴露管アセンブリ;
標的分析物をエアロゾル化する噴霧器;
噴霧器に給気し、エアロゾル化された標的分析物を暴露管アセンブリに渡すためにも用いられる、給気源;
共振周波数データをミリメートルサイズのセンサーから収集する分析器であって、ミリメートルサイズのセンサーの測定した共振周波数をベースライン共振周波数と比較して周波数変化を決定し、該周波数変化は、ミリメートルサイズのセンサーの識別実体上に収集された標的分析物の質量を示す、前記分析器。
【請求項40】
ミリメートルサイズのセンサーのアレイをさらに含み、アレイ中の各センサーは、少なくとも1種の分析物の存在および量を決定するために分析器に周波数情報を提供する、請求項39に記載の装置。
【請求項41】
分析物が炭疽菌胞子である、請求項39に記載の装置。
【請求項42】
以下を含む、空中浮遊分析物を検出するための方法:
基本共振周波数を有するカンチレバー検出デバイスの表面を、固定化抗体で被覆すること;
被覆表面を気流に暴露すること、ここで、気流が空中浮遊分析物を含む場合は、固定化抗体に適合する空中浮遊分析物は被覆表面に結合し;
カンチレバー検出デバイスの発振周波数を測定すること;
識別実体に結合した空中浮遊分析物の量を決定すること。
【請求項43】
以下を含む、空中浮遊分析物を検出するための方法:
カンチレバー検出デバイスの表面を、固定化抗体、アプタマー、組み換えファージ、およびDNA分子からなる群の1種を有する識別実体で被覆すること;
被覆表面を気流に暴露すること、ここで、気流が空中浮遊分析物を含む場合は、識別実体に適合する空中浮遊分析物は被覆表面に結合し;
計算手段を備えた変換器機構を用いて、識別実体に結合した空中浮遊分析物の量を決定すること。
【請求項44】
空中浮遊分析物を検出するセンサーを保持するための装置であって、該装置は、
気体流を入力するための気体注入口;
気体流を気体注入口から排気口へと送る気体流チャンバーを含む、ボディ部;および
センサーを保持する実装部、ここでセンサー上の識別実体は、ボディ部内の気体流に暴露される;
を含み、ここで前記センサーは、識別実体に結合した分析物の質量を検出するミリメートルサイズのカンチレバーデバイスである、前記装置。
【請求項45】
識別実体が、固定化抗体である、請求項44に記載の装置。
【請求項46】
センサーが、自由端型カンチレバーデバイスおよびビーム型カンチレバーデバイスからなるデバイスの群の1種であるカンチレバーデバイスを含み、ここでセンサーは、圧電および非圧電材料の層を含む、請求項44に記載の装置。
【請求項47】
以下を含む、標的分析物を検出するための装置:
第1端および第2端を有する圧電層、ここで第1端は第1ベースに隣接して取り付けられており;
第1端および第2端を有する非圧電層、ここで非圧電層の一部は圧電層と重なりこれに取り付けられており;
非圧電層に付随する識別実体、ここで圧電層、非圧電層、および認識実体の組み合わせは、カンチレバー部を構成し;および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる。
【請求項48】
圧電層が、直線状に配置された圧電部と非圧電部の両方をさらに含む、請求項47に記載の装置。
【請求項49】
圧電層が、接着剤で隔てられた2つの圧電層をさらに含む、請求項47に記載の装置。
【請求項50】
非圧電層が、間隔を空けて直線状に配置された複数の非圧電部をさらに含む、請求項47に記載の装置。
【請求項51】
以下を含む、標的分析物を検出するための装置:
第1端および第2端を有する第1非圧電層、ここで第1端は第1ベースに隣接して取り付けられており;
第1端および第2端を有する圧電層、ここで圧電層の一部は第1非圧電層に直線状の配置で取り付けられており;
第2非圧電層に付随する識別実体、ここで第2非圧電層は圧電層に重なりこれに取り付けられており、ここで圧電層、第1および第2非圧電層、および認識実体の組み合わせは、カンチレバー部を構成し;および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる。
【請求項52】
以下を含む、標的分析物を検出するための装置:
第1ベースに取り付けられた第1端および第2ベースに取り付けられた第2端を有する非圧電層、ここで非圧電層は、第1ベースと第2ベースの間にビームを形成し;
非圧電層に接着された第1圧電層;
非圧電層および圧電層からなる群の1つに付随する識別実体、ここで、圧電層、ビーム、および識別実体の組み合わせは、カンチレバー部を構成し;および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる。
【請求項53】
非圧電層が、直線状に配置された圧電部と非圧電部の両方を含む、請求項52に記載の装置。
【請求項54】
以下を含む、標的分析物を検出するための装置:
第1ベースに取り付けられた第1端および第2ベースに取り付けられた第2端を有する圧電層、ここで圧電層は、第1ベースと第2ベースの間に少なくともビームの一部を形成し;
圧電層に接着された非圧電層;
非圧電層および圧電層からなる群の1つに付随する識別実体、ここで、圧電層、ビーム、および識別実体の組み合わせは、カンチレバー部を構成し;および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる。
【請求項55】
圧電層が、接着剤で隔てられた2つの圧電層を含む、請求項54に記載の装置。
【請求項56】
非圧電層が、間隔を空けて直線状に配置された複数の非圧電部を含む、請求項54に記載の装置。
【請求項57】
標的分析物を検出するための装置であって、該装置は、
ミリメートルサイズのセンサーを含み、該センサーは、
ベース;
近接端においてベースに取り付けられた圧電層;
圧電層の遠位部に取り付けられた非圧電層;
圧電層に動作可能に取り付けられた電極、ここで電極の電気的励振は、圧電層に機械的振動を引き起こし、ここで共振での振動は、非共振での振動よりも、高いレベルの応力をセンサーに与え;および
ここで圧電層への電極の取り付けは、圧電層の他の点と比べて圧電層における電気インピーダンスの増加を示す圧電層上の点に近接している、
を含む、前記装置。
【請求項58】
電気インピーダンスの増加が、圧電層上での応力の増加を示す、請求項57に記載の装置。
【請求項59】
標的分析物を検出するための装置であって、該装置は、
ミリメートルサイズのセンサーを含み、該センサーは、
ベース;
近接端においてベースに取り付けられた圧電層;
圧電層の遠位部に取り付けられた非圧電層;
圧電層に動作可能に取り付けられた電極、ここで電極の電気的励振は、圧電層に機械的振動を引き起こし、ここで共振での振動は、非共振での振動よりも、高いレベルの応力をセンサーに与え;および
ここで標的分析物の検出を強化することは、センサーの曲げ係数を変化させて、電極取り付け点における応力および電気インピーダンスを増強することにより達成される、
を含む、前記装置。
【請求項60】
標的分析物を検出するための装置であって、該装置は、
ミリメートルサイズのセンサーを含み、該センサーは、
ベース;
近接端においてベースに取り付けられた圧電層;
圧電層の遠位部に取り付けられた非圧電層;
圧電層に動作可能に取り付けられた電極、ここで電極の電気的励振は、圧電層に機械的振動を引き起こし、ここで共振での振動は、非共振での振動よりも、高いレベルの応力をセンサーに与え;および
ここで標的分析物の検出を強化することは、圧電層の形状および非圧電層の形状を選択して、電極の位置においてセンサーの少なくとも1つの基本高次モードを実現することにより達成され、ここで少なくとも1つの基本高次モードは、共振におけるインピーダンスおよび性質係数の関数である、
を含む、前記装置。
【請求項61】
センサーの非屈曲モードが、少なくとも1つの高次モードに比べて振幅強度において低減され;および
非屈曲モードが、電極位置での屈曲モード共振におけるインピーダンスに感知可能な寄与を与えない、
請求項60に記載の装置。
【請求項1】
以下のステップを含む、空中浮遊標的分析物を検出するための方法:
ミリメートルサイズのセンサーを提供すること、ここで該センサーは、
第1端および第2端を有する圧電層、ここで第1端は第1ベースに隣接して取り付けられており、
第1端および第2端を有する非圧電層、ここで非圧電層の一部は圧電層と重なりこれに取り付けられており、
非圧電層に付随する識別実体、ここで圧電層、非圧電層、および認識実体の組み合わせは、カンチレバー部を構成し、および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる、
を含み;
前記ミリメートルサイズのセンサーを気流中に実装すること;
カンチレバーの識別実体を、気流中の標的分析物に暴露すること;
カンチレバーの発振周波数を測定すること;および
測定した発振周波数をベースライン発振周波数と比較して、識別実体上の標的分析物の存在を示す周波数シフトを決定すること。
【請求項2】
ミリメートルサイズのセンサーを提供することが、圧電層が、直線状に配置された圧電部と非圧電部の両方を含む、センサーを提供することをさらに含む、請求項1に記載の方法。
【請求項3】
ミリメートルサイズのセンサーを提供することが、圧電層が、接着剤で隔てられた2つの圧電層を含む、センサーを提供することをさらに含む、請求項1に記載の方法。
【請求項4】
ミリメートルサイズのセンサーを提供することが、非圧電層が、間隔を空けて直線状に配置された複数の非圧電部を含む、センサーを提供することをさらに含む、請求項1に記載の方法。
【請求項5】
識別実体上に存在する標的分析物の量を決定すること;
をさらに含む、請求項1に記載の方法。
【請求項6】
ミリメートルサイズのセンサーを提供することが、識別実体が、抗体、DNA分子、アプタマー、ファージおよび生化学的試薬からなる群の1つから選択され、および選択物が、天然および合成により構成されたものからなる群の1つである、ミリメートルサイズのセンサーを提供することをさらに含む、請求項1に記載の方法。
【請求項7】
識別実体が、空中浮遊分析物を認識し結合する抗体である、請求項6に記載の方法。
【請求項8】
空中浮遊分析物が、抗体と結合することによりカンチレバーセンサー表面に化学的に固定化される、請求項7に記載の方法。
【請求項9】
カンチレバーの識別実体を気流中の標的分析物に暴露することが、識別実体を、気流中の生物学的物質および化学物質からなる群の1種に暴露することを含む、請求項1に記載の方法。
【請求項10】
生物学的物質が、炭疽菌胞子である、請求項9に記載の方法。
【請求項11】
複数のミリメートルサイズのセンサーをセンサーアレイ内に提供すること、ここでアレイ内の複数のミリメートルサイズのセンサーの各々は気流に暴露されて、少なくとも1種の分析物を検出する、
をさらに含む、請求項1に記載の方法。
【請求項12】
少なくとも1種の分析物が、複数の周波数シフトを測定することにより検出され、1つの周波数シフトは提供されたミリメートルサイズのセンサーの各々に対するものである、請求項11に記載の方法。
【請求項13】
ミリメートルサイズのセンサーを気流中に実装することが、ミリメートルサイズのセンサーを気流に対して実質的に直角に実装することを含む、請求項1に記載の方法。
【請求項14】
気流が、0.01〜10m/sの範囲である、請求項13に記載の方法。
【請求項15】
カンチレバーの識別実体を気流中の標的分析物に暴露することが、識別実体を標的分析物に、液体媒体中で標的分析物を収集することなく暴露することを含む、請求項1に記載の方法。
【請求項16】
カンチレバーの発振周波数を測定することが、標的分析物への暴露後にカンチレバーが振動したところの共振周波数を測定することを含む、請求項1に記載の方法。
【請求項17】
ミリメートルサイズのセンサーを提供することが、非圧電層の第2端が第2ベースに取り付けられているミリメートルサイズのセンサーを提供することを含む、請求項1に記載の方法。
【請求項18】
以下のステップを含む、空中浮遊標的分析物を検出するための方法:
ミリメートルサイズのセンサーを提供すること、ここで該センサーは、
第1端および第2端を有する第1非圧電層、ここで第1端は第1ベースに隣接して取り付けられており、
第1端および第2端を有する圧電層、ここで圧電層の一部は第1非圧電層に直線状の配置で取り付けられており、
第2非圧電層に付随する識別実体、ここで第2非圧電層は圧電層に重なりこれに取り付けられており、ここで圧電層、第1および第2非圧電層、および認識実体の組み合わせは、カンチレバー部を構成し、および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる、
を含み;
前記ミリメートルサイズのセンサーを気流中に実装すること;
カンチレバーの識別実体を、気流中の標的分析物に暴露すること;
カンチレバーの発振周波数を測定すること;および
測定した発振周波数をベースライン発振周波数と比較して、識別実体上の標的分析物の存在を示す周波数シフトを決定すること。
【請求項19】
以下のステップを含む、空中浮遊標的分析物を検出するための方法:
ミリメートルサイズのセンサーを提供すること、ここで該センサーは、
第1ベースに取り付けられた第1端および第2ベースに取り付けられた第2端を有する非圧電層、ここで非圧電層は、第1ベースと第2ベースの間にビームを形成し、
非圧電層に接着された第1圧電層、
非圧電層および圧電層からなる群の1つに付随する識別実体、ここで、圧電層、ビーム、および識別実体の組み合わせは、カンチレバー部を構成し;および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる、
を含み;
前記ミリメートルサイズのセンサーを気流中に実装すること;
カンチレバーの識別実体を、気流中の標的分析物に暴露すること;
カンチレバーの発振周波数を測定すること;および
測定した発振周波数をベースライン発振周波数と比較して、識別実体上の標的分析物の存在を示す周波数シフトを決定すること。
【請求項20】
ミリメートルサイズのセンサーを提供することが、非圧電層が、直線状に配置された圧電部と非圧電部の両方を含む、センサーを提供することをさらに含む、請求項19に記載の方法。
【請求項21】
識別実体上に存在する標的分析物の量を決定すること;
をさらに含む、請求項19に記載の方法。
【請求項22】
ミリメートルサイズのセンサーを提供することが、識別実体が、抗体、DNA分子、アプタマー、ファージおよび生化学的試薬からなる群の1つから選択され、および選択物が、天然および合成により構成されたものからなる群の1つである、ミリメートルサイズのセンサーを提供することをさらに含む、請求項19に記載の方法。
【請求項23】
識別実体が、空中浮遊分析物を認識し結合する抗体であり、カンチレバーセンサー表面に化学的に固定化されている、請求項22に記載の方法。
【請求項24】
カンチレバーの識別実体を気流中の標的分析物に暴露することが、識別実体を、気流中の生物学的物質および化学物質からなる群の1種に暴露することを含む、請求項19に記載の方法。
【請求項25】
生物学的物質が、炭疽菌胞子である、請求項24に記載の方法。
【請求項26】
複数のミリメートルサイズのセンサーをセンサーアレイ内に提供すること、ここでアレイ内の複数のミリメートルサイズのセンサーの各々は、気流に暴露されて、少なくとも1種の分析物を検出する、
をさらに含む、請求項19に記載の方法。
【請求項27】
気流が、0.01〜10m/sの範囲である、請求項19に記載の方法。
【請求項28】
カンチレバーの識別実体を気流中の標的分析物に暴露することが、識別実体を標的分析物に、液体媒体中で標的分析物を収集することなく暴露することを含む、請求項19に記載の方法。
【請求項29】
カンチレバーの発振周波数を測定することが、標的分析物への暴露後にカンチレバーが振動したところの共振周波数を測定することを含む、請求項19に記載の方法。
【請求項30】
ミリメートルサイズのセンサーを提供することが、ビーム上に位置する第2圧電層を有し、第2圧電層が第1圧電層から隔てられている、ミリメートルサイズのセンサーを提供することを含む、請求項19に記載の方法。
【請求項31】
以下のステップを含む、空中浮遊標的分析物を検出するための方法:
ミリメートルサイズのセンサーを提供すること、ここで該センサーは、
第1ベースに取り付けられた第1端および第2ベースに取り付けられた第2端を有する圧電層、ここで圧電層は、第1ベースと第2ベースの間に少なくともビームの一部を形成し、
圧電層に接着された非圧電層、
非圧電層および圧電層からなる群の1つに付随する識別実体、ここで、圧電層、ビーム、および識別実体の組み合わせは、カンチレバー部を構成し;および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる、
を含み;
前記ミリメートルサイズのセンサーを気流中に実装すること;
カンチレバーの識別実体を、気流中の標的分析物に暴露すること;
カンチレバーの発振周波数を測定すること;および
測定した発振周波数をベースライン発振周波数と比較して、識別実体上の標的分析物の存在を示す周波数シフトを決定すること;および
識別実体上に存在する標的分析物の量を決定すること。
【請求項32】
ミリメートルサイズのセンサーを提供することが、圧電層が、接着剤で隔てられた2つの圧電層を含む、センサーを提供することをさらに含む、請求項31に記載の方法。
【請求項33】
ミリメートルサイズのセンサーを提供することが、非圧電層が、間隔を空けて直線状に配置された複数の非圧電部を含む、センサーを提供することをさらに含む、請求項31に記載の方法。
【請求項34】
ミリメートルサイズのセンサーを提供することが、識別実体が、抗体およびDNA分子からなる群の1つから選択される、ミリメートルサイズのセンサーを提供することをさらに含む、請求項31に記載の方法。
【請求項35】
識別実体が、空中浮遊分析物を認識し結合する抗体であり、カンチレバーセンサー表面に化学的に固定化されている、請求項31に記載の方法。
【請求項36】
カンチレバーの識別実体を気流中の標的分析物に暴露することが、識別実体を、気流中の生物学的物質および化学物質からなる群の1種に暴露することを含む、請求項31に記載の方法。
【請求項37】
生物学的物質が、細菌、ウィルス、接合子嚢、プリオンおよび胞子からなる群の1種である、請求項36に記載の方法。
【請求項38】
生物学的物質が、炭疽菌胞子である、請求項36に記載の方法。
【請求項39】
以下を含む、空中浮遊標的分析物を検出するための装置:
ミリメートルサイズのセンサー、ここで該センサーは、
第1端および第2端を有する第1層、ここで第1端は第1ベースに隣接して取り付けられており、
第1端および第2端を有する第2層、ここで第2層の一部は第1層と重なりこれに接着剤で取り付けられており、ここで第1層は、圧電材料および非圧電材料からなる群から選択され、第2層は第1層とは異なる材料であり、
第2層に付随する識別実体、ここで第1層、第2層および認識実体の組み合わせは、カンチレバー部を構成し、および
圧電材料に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる、
を含み;
前記ミリメートルサイズのセンサーを含む、暴露管アセンブリ;
標的分析物をエアロゾル化する噴霧器;
噴霧器に給気し、エアロゾル化された標的分析物を暴露管アセンブリに渡すためにも用いられる、給気源;
共振周波数データをミリメートルサイズのセンサーから収集する分析器であって、ミリメートルサイズのセンサーの測定した共振周波数をベースライン共振周波数と比較して周波数変化を決定し、該周波数変化は、ミリメートルサイズのセンサーの識別実体上に収集された標的分析物の質量を示す、前記分析器。
【請求項40】
ミリメートルサイズのセンサーのアレイをさらに含み、アレイ中の各センサーは、少なくとも1種の分析物の存在および量を決定するために分析器に周波数情報を提供する、請求項39に記載の装置。
【請求項41】
分析物が炭疽菌胞子である、請求項39に記載の装置。
【請求項42】
以下を含む、空中浮遊分析物を検出するための方法:
基本共振周波数を有するカンチレバー検出デバイスの表面を、固定化抗体で被覆すること;
被覆表面を気流に暴露すること、ここで、気流が空中浮遊分析物を含む場合は、固定化抗体に適合する空中浮遊分析物は被覆表面に結合し;
カンチレバー検出デバイスの発振周波数を測定すること;
識別実体に結合した空中浮遊分析物の量を決定すること。
【請求項43】
以下を含む、空中浮遊分析物を検出するための方法:
カンチレバー検出デバイスの表面を、固定化抗体、アプタマー、組み換えファージ、およびDNA分子からなる群の1種を有する識別実体で被覆すること;
被覆表面を気流に暴露すること、ここで、気流が空中浮遊分析物を含む場合は、識別実体に適合する空中浮遊分析物は被覆表面に結合し;
計算手段を備えた変換器機構を用いて、識別実体に結合した空中浮遊分析物の量を決定すること。
【請求項44】
空中浮遊分析物を検出するセンサーを保持するための装置であって、該装置は、
気体流を入力するための気体注入口;
気体流を気体注入口から排気口へと送る気体流チャンバーを含む、ボディ部;および
センサーを保持する実装部、ここでセンサー上の識別実体は、ボディ部内の気体流に暴露される;
を含み、ここで前記センサーは、識別実体に結合した分析物の質量を検出するミリメートルサイズのカンチレバーデバイスである、前記装置。
【請求項45】
識別実体が、固定化抗体である、請求項44に記載の装置。
【請求項46】
センサーが、自由端型カンチレバーデバイスおよびビーム型カンチレバーデバイスからなるデバイスの群の1種であるカンチレバーデバイスを含み、ここでセンサーは、圧電および非圧電材料の層を含む、請求項44に記載の装置。
【請求項47】
以下を含む、標的分析物を検出するための装置:
第1端および第2端を有する圧電層、ここで第1端は第1ベースに隣接して取り付けられており;
第1端および第2端を有する非圧電層、ここで非圧電層の一部は圧電層と重なりこれに取り付けられており;
非圧電層に付随する識別実体、ここで圧電層、非圧電層、および認識実体の組み合わせは、カンチレバー部を構成し;および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる。
【請求項48】
圧電層が、直線状に配置された圧電部と非圧電部の両方をさらに含む、請求項47に記載の装置。
【請求項49】
圧電層が、接着剤で隔てられた2つの圧電層をさらに含む、請求項47に記載の装置。
【請求項50】
非圧電層が、間隔を空けて直線状に配置された複数の非圧電部をさらに含む、請求項47に記載の装置。
【請求項51】
以下を含む、標的分析物を検出するための装置:
第1端および第2端を有する第1非圧電層、ここで第1端は第1ベースに隣接して取り付けられており;
第1端および第2端を有する圧電層、ここで圧電層の一部は第1非圧電層に直線状の配置で取り付けられており;
第2非圧電層に付随する識別実体、ここで第2非圧電層は圧電層に重なりこれに取り付けられており、ここで圧電層、第1および第2非圧電層、および認識実体の組み合わせは、カンチレバー部を構成し;および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる。
【請求項52】
以下を含む、標的分析物を検出するための装置:
第1ベースに取り付けられた第1端および第2ベースに取り付けられた第2端を有する非圧電層、ここで非圧電層は、第1ベースと第2ベースの間にビームを形成し;
非圧電層に接着された第1圧電層;
非圧電層および圧電層からなる群の1つに付随する識別実体、ここで、圧電層、ビーム、および識別実体の組み合わせは、カンチレバー部を構成し;および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる。
【請求項53】
非圧電層が、直線状に配置された圧電部と非圧電部の両方を含む、請求項52に記載の装置。
【請求項54】
以下を含む、標的分析物を検出するための装置:
第1ベースに取り付けられた第1端および第2ベースに取り付けられた第2端を有する圧電層、ここで圧電層は、第1ベースと第2ベースの間に少なくともビームの一部を形成し;
圧電層に接着された非圧電層;
非圧電層および圧電層からなる群の1つに付随する識別実体、ここで、圧電層、ビーム、および識別実体の組み合わせは、カンチレバー部を構成し;および
圧電層に動作可能に取り付けられた電極、ここで電極からの電気刺激は、カンチレバー部を振動させる。
【請求項55】
圧電層が、接着剤で隔てられた2つの圧電層を含む、請求項54に記載の装置。
【請求項56】
非圧電層が、間隔を空けて直線状に配置された複数の非圧電部を含む、請求項54に記載の装置。
【請求項57】
標的分析物を検出するための装置であって、該装置は、
ミリメートルサイズのセンサーを含み、該センサーは、
ベース;
近接端においてベースに取り付けられた圧電層;
圧電層の遠位部に取り付けられた非圧電層;
圧電層に動作可能に取り付けられた電極、ここで電極の電気的励振は、圧電層に機械的振動を引き起こし、ここで共振での振動は、非共振での振動よりも、高いレベルの応力をセンサーに与え;および
ここで圧電層への電極の取り付けは、圧電層の他の点と比べて圧電層における電気インピーダンスの増加を示す圧電層上の点に近接している、
を含む、前記装置。
【請求項58】
電気インピーダンスの増加が、圧電層上での応力の増加を示す、請求項57に記載の装置。
【請求項59】
標的分析物を検出するための装置であって、該装置は、
ミリメートルサイズのセンサーを含み、該センサーは、
ベース;
近接端においてベースに取り付けられた圧電層;
圧電層の遠位部に取り付けられた非圧電層;
圧電層に動作可能に取り付けられた電極、ここで電極の電気的励振は、圧電層に機械的振動を引き起こし、ここで共振での振動は、非共振での振動よりも、高いレベルの応力をセンサーに与え;および
ここで標的分析物の検出を強化することは、センサーの曲げ係数を変化させて、電極取り付け点における応力および電気インピーダンスを増強することにより達成される、
を含む、前記装置。
【請求項60】
標的分析物を検出するための装置であって、該装置は、
ミリメートルサイズのセンサーを含み、該センサーは、
ベース;
近接端においてベースに取り付けられた圧電層;
圧電層の遠位部に取り付けられた非圧電層;
圧電層に動作可能に取り付けられた電極、ここで電極の電気的励振は、圧電層に機械的振動を引き起こし、ここで共振での振動は、非共振での振動よりも、高いレベルの応力をセンサーに与え;および
ここで標的分析物の検出を強化することは、圧電層の形状および非圧電層の形状を選択して、電極の位置においてセンサーの少なくとも1つの基本高次モードを実現することにより達成され、ここで少なくとも1つの基本高次モードは、共振におけるインピーダンスおよび性質係数の関数である、
を含む、前記装置。
【請求項61】
センサーの非屈曲モードが、少なくとも1つの高次モードに比べて振幅強度において低減され;および
非屈曲モードが、電極位置での屈曲モード共振におけるインピーダンスに感知可能な寄与を与えない、
請求項60に記載の装置。
【図1】

【図2】
【図3】
【図4】
【図5】
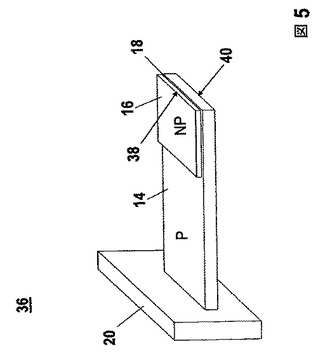
【図6】
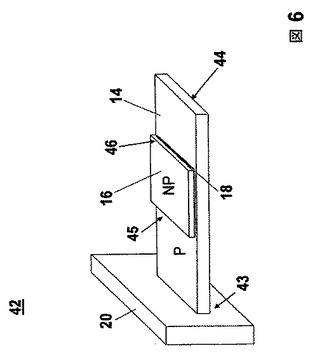
【図7】
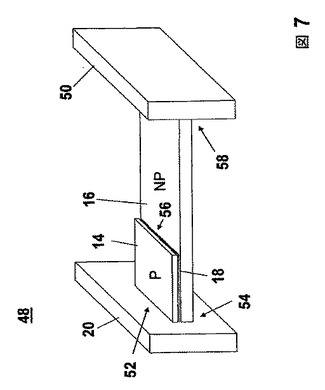
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
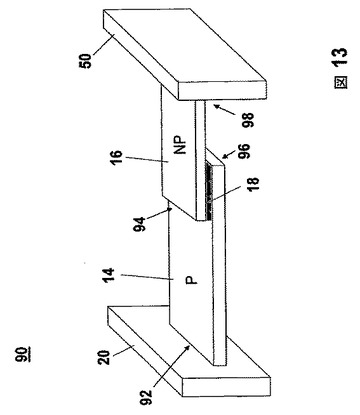
【図14】
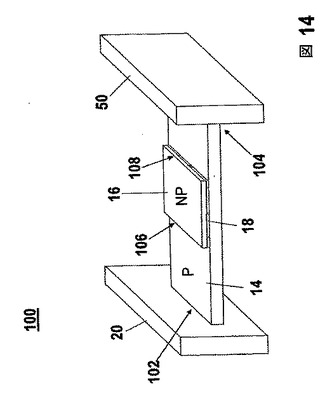
【図15】
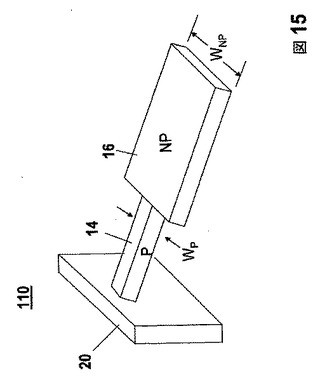
【図16】
【図17】
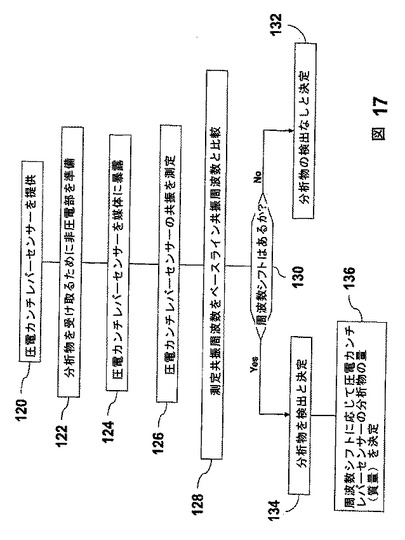
【図18】
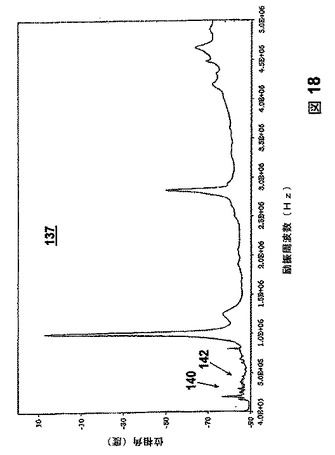
【図19A】
【図19B】
【図19C】
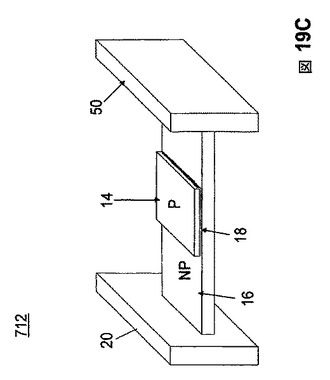
【図19D】

【図19E】
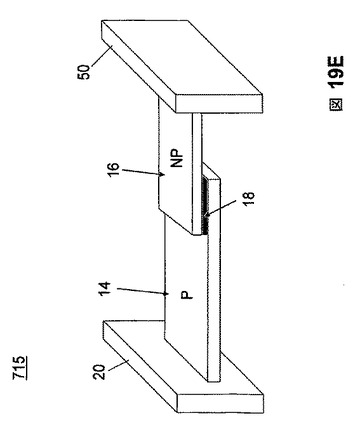
【図19F】
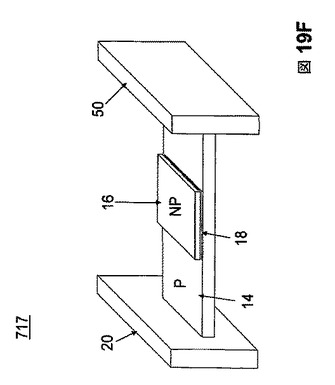
【図19G】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
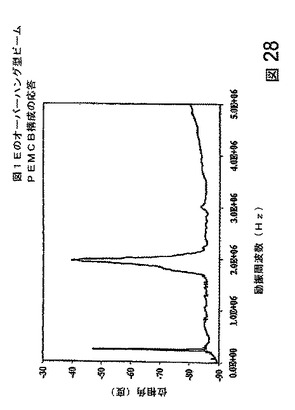
【図29A】
【図29B】
【図30A】
【図30B】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
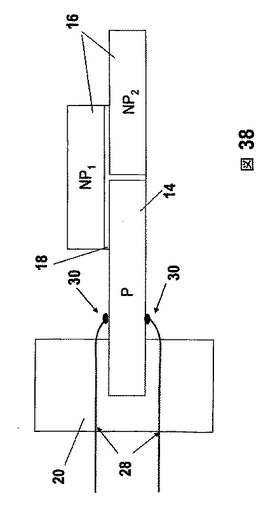
【図39】
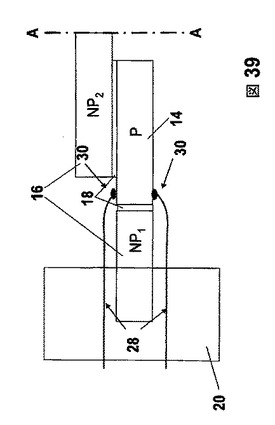
【図40】
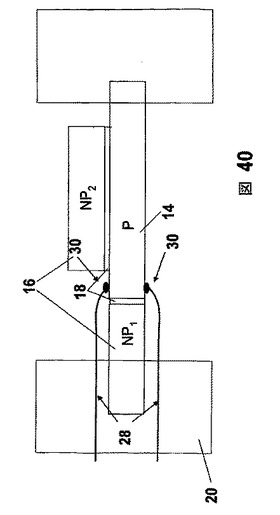
【図41】
【図42】
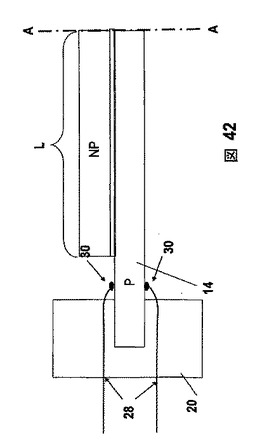
【図43】
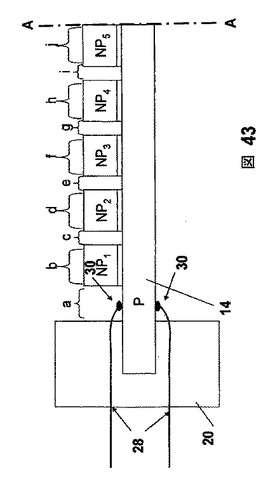
【図44】
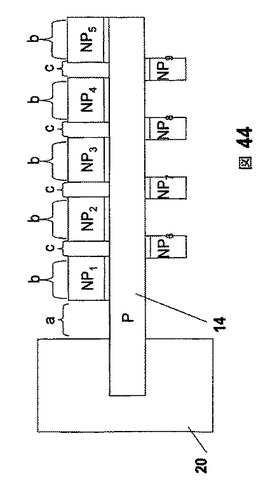
【図45】
【図46】
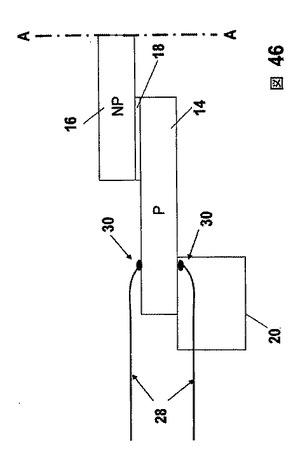
【図47】
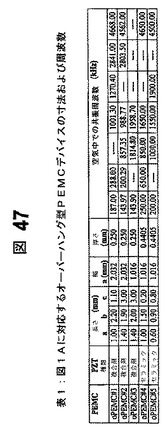
【図48】
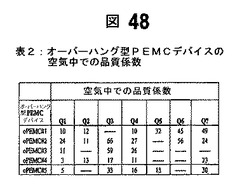
【図49】

【図50】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19A】
【図19B】
【図19C】
【図19D】
【図19E】
【図19F】
【図19G】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29A】
【図29B】
【図30A】
【図30B】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図49】
【図50】
【公表番号】特表2009−536738(P2009−536738A)
【公表日】平成21年10月15日(2009.10.15)
【国際特許分類】
【出願番号】特願2009−509876(P2009−509876)
【出願日】平成19年5月10日(2007.5.10)
【国際出願番号】PCT/US2007/011402
【国際公開番号】WO2008/020903
【国際公開日】平成20年2月21日(2008.2.21)
【出願人】(598072065)ドレクセル・ユニバーシティー (11)
【Fターム(参考)】
【公表日】平成21年10月15日(2009.10.15)
【国際特許分類】
【出願日】平成19年5月10日(2007.5.10)
【国際出願番号】PCT/US2007/011402
【国際公開番号】WO2008/020903
【国際公開日】平成20年2月21日(2008.2.21)
【出願人】(598072065)ドレクセル・ユニバーシティー (11)
【Fターム(参考)】
[ Back to top ]