
空圧ポンプ
【課題】作業者が長時間使用しても疲労することがなく、また、容易に動き周りながら使用することができる空圧ポンプを提供することにある。
【解決手段】シリンダ111とピストン112を有する空気圧縮装置110と、矩形状に枠組みされており、一辺部が前記シリンダに連結され、該一辺部に対向する他辺部が人の足で踏まれる足踏み部134として設けられている第1枠部材131、及び矩形状に枠組みされており、一辺部が前記ピストンに連結され、該一辺部に対向する他辺部が足踏み荷重を受ける荷重受け部140として設けられ、他の対向辺部が前記第1枠部材の他の対向辺部に沿って摺動可能な第2枠部材132を有し、人の足踏み運動により前記第1枠部材と前記第2枠部材が接近・離間して、該足踏み運動を前記ピストンの往復運動に変換する運動変換装置130とを備える。
【解決手段】シリンダ111とピストン112を有する空気圧縮装置110と、矩形状に枠組みされており、一辺部が前記シリンダに連結され、該一辺部に対向する他辺部が人の足で踏まれる足踏み部134として設けられている第1枠部材131、及び矩形状に枠組みされており、一辺部が前記ピストンに連結され、該一辺部に対向する他辺部が足踏み荷重を受ける荷重受け部140として設けられ、他の対向辺部が前記第1枠部材の他の対向辺部に沿って摺動可能な第2枠部材132を有し、人の足踏み運動により前記第1枠部材と前記第2枠部材が接近・離間して、該足踏み運動を前記ピストンの往復運動に変換する運動変換装置130とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、外部に空気を圧送する空圧ポンプに関し、特に足踏み式の空圧ポンプに関する。
【背景技術】
【0002】
災害時に使用する動力付きの救助機器を全ての地域に用意しておくことは非常に困難であり、また電力等の供給が滞ったときは動力付きの救助機器を使用することができなくなる。このような場合、手動の空圧ポンプにより圧縮空気を提供して空圧駆動型の各種救助機器が利用できると救助活動を非常に効率的に行うことができる。手動の空圧ポンプを災害時に利用するには、作業者が空圧ポンプを長時間使用しても疲れ難く、また作業者が他の救助活動を行いながら、即ち作業者が動き回りながら空圧ポンプを使用することができることが必要である。
【0003】
しかし、手押し式空圧ポンプでは、腕の力を利用しているため作業者が疲れ易く、長時間の使用は困難である。一方、足踏み式空圧ポンプは、脚の力を利用しているため作業者は疲れ難いが、安定性が悪くて足が踏込み部から外れ易いため、使用し難いことが多い。更に、何れの空圧ポンプも一箇所に留めて使用されるため、作業者が動き回りながら該空圧ポンプを使用するには不向きである。そこで、作業者の足先に装着可能な構成とすることにより、安定性を高めて使用し易くし、かつ動き回りながら使用することができるようにした空圧ポンプが提案されている(非特許文献1参照)。
【0004】
【非特許文献1】広瀬茂男、阿部顕一「災害時救助作業に使用できる高性能家庭用空気入れの開発」、ロボティクス・メカトロニクス講演会’01講演論文集、1P1−E8(1)−(2)(2001)
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述した従来の空圧ポンプでは、基本的にポンプ全体が作業者の足首よりも下方の足先に装着されるため、足先が重くなり、足首の運動が不自由になる。このため、実際に空圧ポンプを装着して動き回るには困難が伴い、長時間使用すると作業者の極端な疲労を招いてしまうおそれがある。
【0006】
本発明は、上記のような課題に鑑みなされたものであり、その目的は、人が長時間使用しても疲れ難い空圧ポンプを提供することにある。更に、安定性を高めて使用し易くし、かつ容易に動き回りながら使用することができる空圧ポンプを提供することにある。
【課題を解決するための手段】
【0007】
上記目的達成のため、本発明の空圧ポンプでは、シリンダと該シリンダ内で摺動して空気を圧縮するピストンとを有する空気圧縮装置と、矩形状に枠組みされており、一辺部が前記シリンダに連結され、該一辺部に対向する他辺部が人の足で踏まれる足踏み部として設けられている第1枠部材、及び矩形状に枠組みされており、一辺部が前記ピストンに連結され、該一辺部に対向する他辺部が足踏み荷重を受ける荷重受け部として設けられ、他の対向辺部が前記第1枠部材の他の対向辺部に沿って摺動可能な第2枠部材を有し、人の足踏み運動により前記第1枠部材と前記第2枠部材が接近・離間して、該足踏み運動を前記ピストンの往復運動に変換する運動変換装置とを備えたことを特徴としている。
【0008】
これにより、空気圧縮装置は足踏み部付近に位置する人の足首よりも上方に配置されることになるので、足首よりも下方の足先には重量のある構成要素は取り付けられないことになる。このため、足首の運動が不自由にならないので、作業者が長時間使用しても疲れ難いものとなる。
【0009】
また、上記目的達成のため、本発明の他の空圧ポンプでは、シリンダと該シリンダ内で摺動して空気を圧縮するピストンとを有する少なくとも2台の空気圧縮装置と、矩形状に枠組みされており、一辺部が前記シリンダに連結され、該一辺部に対向する他辺部が人の足で踏まれる足踏み部として設けられている第1枠部材、及び矩形状に枠組みされており、一辺部が前記ピストンに連結され、該一辺部に対向する他辺部が足踏み荷重を受ける荷重受け部として設けられ、他の対向辺部が前記第1枠部材の他の対向辺部に沿って摺動可能な第2枠部材を有し、人の足踏み運動により前記第1枠部材と前記第2枠部材が接近・離間して、該足踏み運動を前記ピストンの往復運動に変換する運動変換装置と、外部に圧送された空気の負荷に感応して、前記第2枠部材の一辺部と少なくとも1台の前記空気圧縮装置のピストンとの連結を解除する連結解除装置とを備えたことを特徴としている。
【0010】
これにより、上記作用効果に加え、空圧ポンプの作動初期には複数の空気圧縮装置で多量の空気を圧送することができるため、人の足踏み運動時間を短縮させることができる。また、空圧ポンプの作動後期には外部に圧送された空気の負荷に感応した数の空気圧縮装置で空気を圧送することになるため、人の足踏み運動荷重を軽減させることができる。
【0011】
また、前記連結解除装置が、前記ピストンを係止・係止解除する係止部材と、該係止部材を係止方向に付勢する付勢部材とを備えたことを特徴としている。これにより、連結解除装置を簡易な構成とすることができるので、空圧ポンプの重量増加やコスト増を抑えることができる。
【0012】
また、前記空気圧縮装置を人の脛の前側部に取り付ける脛取付装置を備えたことを特徴としている。また、前記運動変換装置の足踏み部を人の足の裏側部に取り付ける足取付装置を備えたことを特徴としている。これにより、人と空圧ポンプを一体化することができるので、空圧ポンプの安定性を高めて使用し易くし、人は容易に動き回りながら使用することができる。
【0013】
また、前記運動変換装置の足踏み部が、人の足の回動方向に回動自在となるように前記第1枠部材の他の対向辺部端部に設けられていることを特徴としている。これにより、空圧ポンプを装着した人が足首を動かした場合に、足踏み部は足首の動きに合わせて足の裏側部に追従するように回動することができる。よって、足首の運動の自由が奪われることがなく、ほとんど違和感なく容易に動き回ることができる。
【発明を実施するための最良の形態】
【0014】
本発明の実施形態について、図面を参照して説明する。尚、以下に説明する実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【0015】
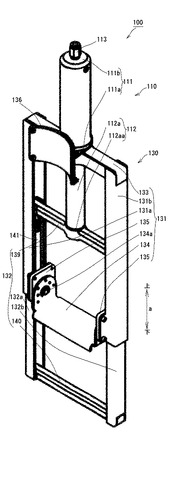
図1は、本発明の第1の実施の形態に係る空圧ポンプを示す斜視図である。この空圧ポンプ100は、人の脛と足に取り付けられ、人の足踏み運動のエネルギを空気圧縮のエネルギに変換することにより作動するポンプである。空圧ポンプ100は、外部の例えばアキュムレータやエアージャッキ等(図示せず)に空気を圧送する空気圧縮装置110と、この空気圧縮装置110を作動させる運動変換装置130を備えている。尚、以下の説明では、図中の矢印aの方向を上下とする。
【0016】
空気圧縮装置110は、シリンダ111と該シリンダ111内でシリンダ111の軸方向に摺動するピストン112を有する。シリンダ111の下端111aからは、ピストン112のロッド112aが突出しており、シリンダ111の上端111bには、給排気部113が設けられている。この給排気部113は、例えばホース等の空気導管(図示せず)を介して上記アキュムレータやエアージャッキ等に接続される。給排気部113には、2系統の逆止弁(図示せず)が内蔵されている。即ち、シリンダ111外の空気をシリンダ111内に流入させ、シリンダ111内の空気はシリンダ111外に流出させない逆止弁と、シリンダ111内の空気は上記アキュムレータやエアージャッキ等に流出させ、シリンダ111外の空気はシリンダ111内に流入させない逆止弁が内蔵されている。
【0017】
運動変換装置130は、チャンネル材を矩形状に枠組みした第1枠部材131と第2枠部材132を有する。第1枠部材131の上辺部は、シリンダホルダ133としてシリンダ111の下端111aに連結されている。また、該シリンダホルダ133に対向する下辺部は、詳細は後述するが人の足で踏まれるステップ(足踏み部)134として設けられている。このステップ134は、側面視コの字状に形成されており、両端がステップホルダ135に回動軸ピン(図では左側のみ示す)134aを介して回動自在に軸支持されている。そして、各ステップホルダ135は、シリンダホルダ133の両端に直交するように各上端が固定されたスライダ(対向辺部)131a、131bの各下端に固定されている。
【0018】
また、詳細は後述するが、シリンダホルダ133とシリンダ111の下端111aの間には、人の脛の前側部に沿うように僅かに湾曲形成された脛取付具(脛取付装置)136が取り付けられ、更にこの脛取付具136には、図3に示す人の脛を取り付けるための脛取付ベルト(脛取付装置)137が取り付けられている。そして、ステップ134には、図3に示す人の足を取り付けるための足取付具(足取付装置)138が取り付けられている。
【0019】
第2枠部材132の上辺部は、ピストンホルダ139としてピストン112のロッド112aの下端112aaに連結されている。また、該ピストンホルダ139に対向する下辺部は、詳細は後述するが例えば地上に載置されて上記ステップ134が人の足で踏まれたときに該足踏み荷重を受けるベース(荷重受け部)140として設けられている。そして、ピストンホルダ139の両端に直交するように各上端が固定されたスライダガイド(対向辺部)132a、132bは、上記スライダ131a、131bの溝内に嵌め込まれている。これにより、スライダ131a、131bは、スライダガイド132a、132bに沿って溝方向(図示上下方向)に摺動自在となる。そして、各ステップホルダ135と各スライダ131a、131bの上端の間には、引張バネ(図では左側のみ示す)141の両端がそれぞれ係止されている。以上のような構成において、その組立手順について図2を参照して説明する。
【0020】
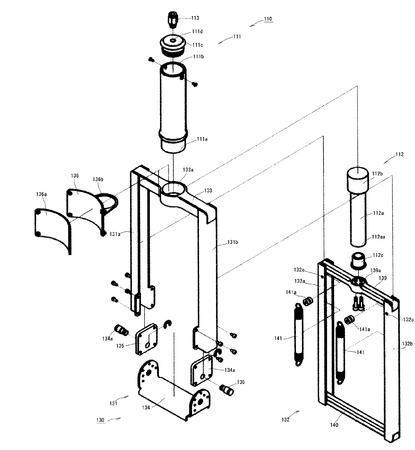
図2は、図1に示す空圧ポンプの分解斜視図である。ここで、第1枠部材131のシリンダホルダ133とスライダガイド131a、131bは、既に溶接もしくは接着等により接合済みであり、第2枠部材132のピストンホルダ139とスライダ132a、132bとベース140も、既に溶接もしくは接着等により接合済みである。
【0021】
シリンダ111の上端111bにシリンダ蓋111cを嵌め込んでネジ止めする。そして、シリンダ蓋111cを貫通している給排気口111dに給排気部113をねじ込む。また、脛取付具136にフェルトもしくはゴム等で成るパッド136aを接着する。このパッド136aは、空圧ポンプ100の作動時に人の脛を傷付けないようにするためのものである。そして、脛取付具136の支持部136bを第1枠部材131のシリンダホルダ133の取付穴133aに合わせ、シリンダ111の下端111aを支持部136bに通して取付穴133aに嵌合する。
【0022】
一方、ピストン112のロッド112aの下端112aaにピストン蓋112cを嵌合する。そして、ピストン蓋112cを第2枠部材132のピストンホルダ139の取付部139aに位置合わせしてネジ止めする。また、第2枠部材132のスライダガイド132a、132bの図示上部に穿設されているネジ穴132cにバネ係止ピン141aを螺合し、該バネ係止ピン141aに引張バネ141の一端を係止する。
【0023】
この第2枠部材132のスライダガイド132a、132bを、先に組み立てた第1枠部材131のスライダ131a、131bの溝内に下方から挿入する。そして、ピストン112のヘッド112bを、シリンダ111の下端111aから内部へ挿入する。また、ステップ134の両端にステップホルダ135を回動軸ピン134aにより取り付ける。そして、各ステップホルダ135をスライダ131a、131bの各下端にネジ止めする。以上により、図1に示す空圧ポンプ100が完成する。次に、その使用手順について説明する。
【0024】
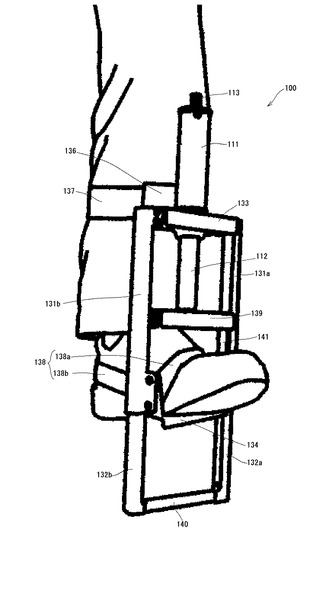
図3は、図1に示す空圧ポンプを人が装着した状態を示す斜視図、図4(A)、(B)は、空圧ポンプの動作状態を示す斜視図である。
ここで、図3に示すように、ステップ133に取り付けられている足取付具138は、足先固定ベルト(足取付装置)138aと踵固定ベルト(足取付装置)138bを有する。足先固定ベルト138a及び踵固定ベルト138bは、共に2本のベルトで構成されており、各ベルトの一端はステップ133の両端に固定され、各ベルトの他端には図示しない面ファスナが付けられている。また、脛取付具136に取り付けられている脛取付ベルト137も、2本のベルトで構成されており、各ベルトの一端は脛取付具136の両端に固定され、各ベルトの他端には図示しない面ファスナが付けられている。
【0025】
先ず、作業者は、椅子等に腰を掛けた状態で、空圧ポンプ100のシリンダ111を持ってベース140を地面上に載置する。続いて、片脚を上げて足の裏側部をステップ133上に載置する。そして、足先と踵をステップ133に取り付けられている足先固定ベルト138aと踵固定ベルト138bで固定する。更に、脛の前側部を脛取付具136に押し当てる。そして、脛を脛取付具136に取り付けられている脛取付ベルト137で固定する。これにより、作業者と空圧ポンプ100を一体化することができるので、空圧ポンプ100の安定性を高めて使用し易くし、作業者は容易に動き回りながら空圧ポンプ100を使用することができる。
【0026】
以上により、作業者への空圧ポンプ100の装着が完了する。この状態では、図4(A)に示すように、第1枠部材131は、引張バネ141により引っ張られて第2枠部材132から離間した状態にある。次に、作業者が椅子から立ち上がると、作業者の荷重がステップ133に対し下方向に掛かることになるので、第1枠部材131は第2枠部材132に沿って降下(接近)する。そして、最終的には、図4(B)に示すように、第1枠部材131は、第2枠部材132と重なり合う。そして、給排気部113にアキュムレータやエアージャッキ等に接続されているホース等の空気導管を繋ぐ。
【0027】
続いて、作業者が脚を上げると、図4(A)に示すように、引張バネ141の復元力により第1枠部材131は第2枠部材132に沿って上昇(離間)する。このとき、シリンダ111も上昇するので、ピストン112がシリンダ111外の空気を給排気部113を介してシリンダ111内に吸引する。
【0028】
そして、作業者が脚を下げると、図4(B)に示すように、作業者の荷重がステップ133に下方向に掛かることになるので、第1枠部材131は第2枠部材132に沿って降下(接近)する。このとき、シリンダ111も降下するので、ピストン112がシリンダ111内の空気を圧縮して給排気部113からホース等の空気導管を介して外部のアキュムレータやエアージャッキ等に圧送する。
【0029】
以上のように、第1枠部材131と第2枠部材132が接近・離間して、作業者の足踏み運動がピストン112の往復運動に変換されるので、該足踏み運動を繰り返すことにより、シリンダ111内の空気を圧縮して給排気部113からホース等の空気導管を介して外部のアキュムレータやエアージャッキ等に間歇的に圧送することができる。尚、作業者が空圧ポンプ100を2台用意して両脚に装着していた場合には、空気の圧送を連続的に行うことができる。
【0030】
また、空気圧縮装置110はステップ133付近に位置する作業者の足首よりも上方に配置されることになる。従って、足首よりも下方の足先には重量のある構成要素は取り付けられないことになるため、足首の運動が不自由にならないので、作業者が長時間使用しても疲れ難いものとなる。更に、ステップ133は作業者の足首の動きに合わせて足の裏側部に追従するように回動するので、作業者の足先と踵を足先固定ベルト138aと踵固定ベルト138bでステップ133に固定していても作業者の足首の運動の自由が奪われることがなく、作業者は空圧ポンプ100を装着していてもほとんど違和感なく容易に動き回ることができる。
【0031】
尚、図4(B)に示す第1枠部材131と第2枠部材132が重なり合った状態で、図示しないストッパ(例えばピンと、該ピンを差し込み可能な第1枠部材131と第2枠部材132を貫通しているピン穴)により第1枠部材131と第2枠部材132を固定することにより、作業者は空圧ポンプ100を装着したまま通常通りに歩行することが可能となる。
【0032】
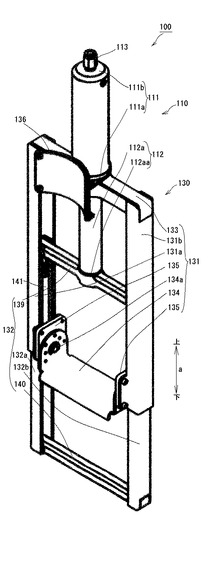
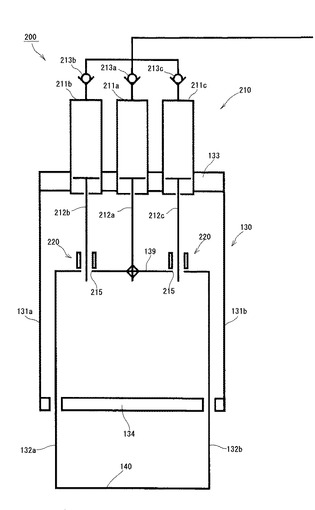
図5は、本発明の第2の実施の形態に係る空圧ポンプを示す斜視図である。この空圧ポンプ200は、人の脛と足に取り付けられ、人の足踏み運動のエネルギを空気圧縮のエネルギに変換するものであり、基本的には図1に示す空圧ポンプ100と同一構成であるため、同一点は同一番号を付してそれらの説明を省略し、相違点のみを説明する。空圧ポンプ200は、外部の例えばアキュムレータやエアージャッキ等(図示せず)に空気を圧送する空気圧縮装置210と、この空気圧縮装置210を作動させる運動変換装置130を備えている。
【0033】
空気圧縮装置210は、3台のシリンダ211a、211b、211cと該シリンダ211a、211b、211c内でシリンダ211a、211b、211cの軸方向に摺動するピストン212a、212b、212cを有する。図示中央に配置されているシリンダ211a及びピストン212aは、図1に示す空圧ポンプ100のシリンダ111及びピストン112と同様に動作するが、図示両側に配置されているシリンダ211b、211c及びピストン212b、212cは、外部に圧送された空気の負荷に感応して動作する。
【0034】
即ち、外部に圧送された空気の負荷に感応して、ピストン212b、212cと第2枠部材132のピストンホルダ139との連結を解除して、ピストン212b、212cをピストンホルダ139に穿設されているピストン穴215から突出させる連結解除装置220を備えている。これにより、空圧ポンプ200の作動初期には全てのシリンダ211a、211b、211c及びピストン212a、212b、212cで多量の空気を圧送することができるため、人の足踏み運動時間を短縮させることができる。また、空圧ポンプ200の作動後期には外部に圧送された空気の圧力の上昇に感応し、連結解除装置220が作動して連結が解除され、1台のシリンダ211a及びピストン212aで空気を圧送することになるため、人の足踏み運動荷重が過大になることを防ぐことができる。
【0035】
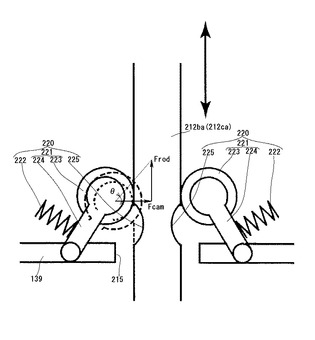
図6は、連結解除装置の一例を示す図である。この連結解除装置220は、ピストン212b(212c)のロッド212ba(212ca)を周面両側から係止する2つのスリッパ(係止部材)221と、各スリッパ221をロッド212ba(212ca)の周面方向(係止方向)に付勢する2つの圧縮バネ(付勢部材)222を備えている。スリッパ221は、カムフォロア223と、このカムフォロア223を一端で回動自在に軸支持するアーム224を有する。2つのカムフォロア223は、ロッド212ba(212ca)の周面に対向するように設けられている円弧面状のカム溝225に嵌り込むことが可能になっている。アーム224の他端は、ピストンホルダ139に回動自在に軸支持されている。これにより連結解除装置220を簡易な構成とすることができるので、空圧ポンプ100の重量増加やコスト増を抑えることができる。このような構成において、その動作を図6及び図7(A)、(B)、(C)を参照して説明する。
【0036】
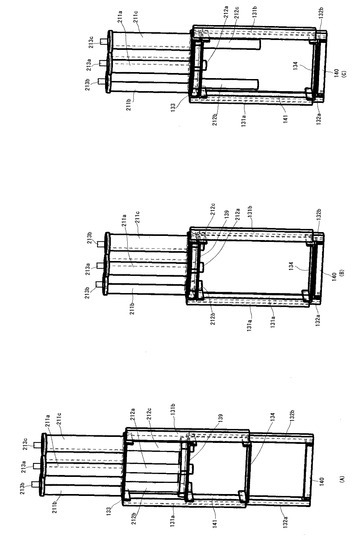
図7(A)、(B)、(C)は、空圧ポンプの動作状態を示す斜視図である。
作業者は、図1に示す空圧ポンプ100と同様の手順で空圧ポンプ200を装着する。この状態では、図7(A)に示すように、第1枠部材131は、引張バネ141により引っ張られて第2枠部材132から離間した状態にある。次に、作業者が椅子から立ち上がると、作業者の荷重がステップ133に対し下方向に掛かることになるので、第1枠部材131は第2枠部材132に沿って降下(接近)する。このとき、カムフォロア223はカム溝225に嵌り込んで、圧縮バネ222がアーム224を付勢しているので、ロッド212ba、212caとピストンホルダ139は連結状態にある。従って、3台のピストン212a、212b、212cはそのままの状態で、3台のシリンダ211a、211b、211cが降下する。そして、最終的には、図7(B)に示すように、第1枠部材131は、第2枠部材132と重なり合う。そして、給排気部213a、213b、213cにアキュムレータやエアージャッキ等に接続されているホース等の空気導管を繋ぐ。
【0037】
続いて、作業者が脚を上げると、図7(A)に示すように、引張バネ141の復元力により第1枠部材131は第2枠部材132に沿って上昇(離間)する。このときも、カムフォロア223はカム溝225に嵌り込んで、圧縮バネ222がアーム224を付勢しているので、ロッド212ba、212caとピストンホルダ139は連結状態にある。従って、3台のシリンダ211a、211b、211cも上昇するので、3台のピストン212a、212b、212cが3台のシリンダ211a、211b、211c外の空気を給排気部213a、213b、213cを介してシリンダ211a、211b、211c内に吸引する。
【0038】
そして、作業者が脚を下げると、図7(B)に示すように、作業者の荷重がステップ133に下方向に掛かることになるので、第1枠部材131は第2枠部材132に沿って降下(接近)する。このときも、カムフォロア223はカム溝225に嵌り込んで、圧縮バネ222がアーム224を付勢しているので、ロッド212ba、212caとピストンホルダ139は連結状態にある。従って、3台のシリンダ211a、211b、211cも降下するので、3台のピストン212a、212b、212cが3台のシリンダ211a、211b、211c内の空気を圧縮して給排気部213a、213b、213cを介して外部のアキュムレータやエアージャッキ等に圧送する。このように、空圧ポンプ200の作動初期には全てのシリンダ211a、211b、211c及びピストン212a、212b、212cで多量の空気を圧送することができるため、人の足踏み運動時間を短縮させることができる。
【0039】
その後、外部のアキュムレータやエアージャッキ等に圧送された空気の負荷が増加してくると、作業者が脚を下げたときのロッド212ba、212caに働く軸方向の力Frodが、カムフォロア223をカム溝225に押し付ける力Fcamよりも大きくなるときがくる。
【0040】
ここで、図6に示すように、カムフォロア223とカム溝225の接触角(接触角が0はカム溝225が無い場合ととる)をθとすると、カムフォロア223をカム溝225に押し付ける力Fcamとロッド212ba、212caに働く軸方向の力Frodには、Fcam=(1/tanθ)・Frodの関係がある。θが小さいと(1/tanθ)は大きくなるので、カムフォロア223がカム溝225から外れないようにするには圧縮バネ222のバネ定数を大きくする必要がある。尚、θが0のときは(1/tanθ)も0であるため、Fcamが0でもロッド212ba、212caは動かない。
【0041】
このように、ロッド212ba、212caに働く軸方向の力Frodが、カムフォロア223をカム溝225に押し付ける力Fcamよりも大きくなったときに、カムフォロア223がカム溝225から外れるので、ピストン212b、212cとピストンホルダ139の連結が解除される。従って、図7(C)に示すように、3台のシリンダ211a、211b、211cの降下に伴って、2台のピストン212b、212cも降下してしまうので、1台のピストン212aのみが1台のシリンダ211a内の空気を圧縮して給排気部213aを介して外部のアキュムレータやエアージャッキ等に圧送する。このように、空圧ポンプ200の作動後期には外部に圧送された空気の負荷に感応した数、例えば1台のシリンダ211a及びピストン212aで空気を圧送することになるため、人の足踏み運動荷重を軽減させることができる。
【0042】
尚、上述した第2の実施形態では、3台のピストン212a、212b、212cと3台のシリンダ211a、211b、211cを備えた空気圧縮装置210としたが、2台以上であれば配置可能な範囲で特に限定されるものではない。
【図面の簡単な説明】
【0043】
【図1】本発明の第1の実施の形態に係る空圧ポンプを示す斜視図である。
【図2】図1に示す空圧ポンプの分解斜視図である。
【図3】図1に示す空圧ポンプを人が装着した状態を示す斜視図である。
【図4】図1に示す空圧ポンプの動作状態を示す斜視図である。
【図5】本発明の第2の実施の形態に係る空圧ポンプを示す斜視図である。
【図6】図5の連結解除装置の一例を示す図である。
【図7】図5に示す空圧ポンプの動作状態を示す斜視図である。
【符号の説明】
【0044】
100、200 空圧ポンプ、110、210 空気圧縮装置、111、211a、211b、211c シリンダ、112、212a、212b、212c ピストン、112a、212aa、212ba、212ca ロッド、112b ヘッド、113 給排気部、130 運動変換装置、131 第1枠部材、131a、131b スライダ、132 第2枠部材、132a、132b スライダガイド、133 シリンダホルダ、134 ステップ、134a 回動軸ピン、135 ステップホルダ、136 脛取付具、137 脛取付ベルト、138 足取付具、139 ピストンホルダ、140 ベース、141 引張バネ、220 連結解除装置、221 スリッパ、222 圧縮バネ、223 カムフォロア、224 アーム
【技術分野】
【0001】
本発明は、外部に空気を圧送する空圧ポンプに関し、特に足踏み式の空圧ポンプに関する。
【背景技術】
【0002】
災害時に使用する動力付きの救助機器を全ての地域に用意しておくことは非常に困難であり、また電力等の供給が滞ったときは動力付きの救助機器を使用することができなくなる。このような場合、手動の空圧ポンプにより圧縮空気を提供して空圧駆動型の各種救助機器が利用できると救助活動を非常に効率的に行うことができる。手動の空圧ポンプを災害時に利用するには、作業者が空圧ポンプを長時間使用しても疲れ難く、また作業者が他の救助活動を行いながら、即ち作業者が動き回りながら空圧ポンプを使用することができることが必要である。
【0003】
しかし、手押し式空圧ポンプでは、腕の力を利用しているため作業者が疲れ易く、長時間の使用は困難である。一方、足踏み式空圧ポンプは、脚の力を利用しているため作業者は疲れ難いが、安定性が悪くて足が踏込み部から外れ易いため、使用し難いことが多い。更に、何れの空圧ポンプも一箇所に留めて使用されるため、作業者が動き回りながら該空圧ポンプを使用するには不向きである。そこで、作業者の足先に装着可能な構成とすることにより、安定性を高めて使用し易くし、かつ動き回りながら使用することができるようにした空圧ポンプが提案されている(非特許文献1参照)。
【0004】
【非特許文献1】広瀬茂男、阿部顕一「災害時救助作業に使用できる高性能家庭用空気入れの開発」、ロボティクス・メカトロニクス講演会’01講演論文集、1P1−E8(1)−(2)(2001)
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述した従来の空圧ポンプでは、基本的にポンプ全体が作業者の足首よりも下方の足先に装着されるため、足先が重くなり、足首の運動が不自由になる。このため、実際に空圧ポンプを装着して動き回るには困難が伴い、長時間使用すると作業者の極端な疲労を招いてしまうおそれがある。
【0006】
本発明は、上記のような課題に鑑みなされたものであり、その目的は、人が長時間使用しても疲れ難い空圧ポンプを提供することにある。更に、安定性を高めて使用し易くし、かつ容易に動き回りながら使用することができる空圧ポンプを提供することにある。
【課題を解決するための手段】
【0007】
上記目的達成のため、本発明の空圧ポンプでは、シリンダと該シリンダ内で摺動して空気を圧縮するピストンとを有する空気圧縮装置と、矩形状に枠組みされており、一辺部が前記シリンダに連結され、該一辺部に対向する他辺部が人の足で踏まれる足踏み部として設けられている第1枠部材、及び矩形状に枠組みされており、一辺部が前記ピストンに連結され、該一辺部に対向する他辺部が足踏み荷重を受ける荷重受け部として設けられ、他の対向辺部が前記第1枠部材の他の対向辺部に沿って摺動可能な第2枠部材を有し、人の足踏み運動により前記第1枠部材と前記第2枠部材が接近・離間して、該足踏み運動を前記ピストンの往復運動に変換する運動変換装置とを備えたことを特徴としている。
【0008】
これにより、空気圧縮装置は足踏み部付近に位置する人の足首よりも上方に配置されることになるので、足首よりも下方の足先には重量のある構成要素は取り付けられないことになる。このため、足首の運動が不自由にならないので、作業者が長時間使用しても疲れ難いものとなる。
【0009】
また、上記目的達成のため、本発明の他の空圧ポンプでは、シリンダと該シリンダ内で摺動して空気を圧縮するピストンとを有する少なくとも2台の空気圧縮装置と、矩形状に枠組みされており、一辺部が前記シリンダに連結され、該一辺部に対向する他辺部が人の足で踏まれる足踏み部として設けられている第1枠部材、及び矩形状に枠組みされており、一辺部が前記ピストンに連結され、該一辺部に対向する他辺部が足踏み荷重を受ける荷重受け部として設けられ、他の対向辺部が前記第1枠部材の他の対向辺部に沿って摺動可能な第2枠部材を有し、人の足踏み運動により前記第1枠部材と前記第2枠部材が接近・離間して、該足踏み運動を前記ピストンの往復運動に変換する運動変換装置と、外部に圧送された空気の負荷に感応して、前記第2枠部材の一辺部と少なくとも1台の前記空気圧縮装置のピストンとの連結を解除する連結解除装置とを備えたことを特徴としている。
【0010】
これにより、上記作用効果に加え、空圧ポンプの作動初期には複数の空気圧縮装置で多量の空気を圧送することができるため、人の足踏み運動時間を短縮させることができる。また、空圧ポンプの作動後期には外部に圧送された空気の負荷に感応した数の空気圧縮装置で空気を圧送することになるため、人の足踏み運動荷重を軽減させることができる。
【0011】
また、前記連結解除装置が、前記ピストンを係止・係止解除する係止部材と、該係止部材を係止方向に付勢する付勢部材とを備えたことを特徴としている。これにより、連結解除装置を簡易な構成とすることができるので、空圧ポンプの重量増加やコスト増を抑えることができる。
【0012】
また、前記空気圧縮装置を人の脛の前側部に取り付ける脛取付装置を備えたことを特徴としている。また、前記運動変換装置の足踏み部を人の足の裏側部に取り付ける足取付装置を備えたことを特徴としている。これにより、人と空圧ポンプを一体化することができるので、空圧ポンプの安定性を高めて使用し易くし、人は容易に動き回りながら使用することができる。
【0013】
また、前記運動変換装置の足踏み部が、人の足の回動方向に回動自在となるように前記第1枠部材の他の対向辺部端部に設けられていることを特徴としている。これにより、空圧ポンプを装着した人が足首を動かした場合に、足踏み部は足首の動きに合わせて足の裏側部に追従するように回動することができる。よって、足首の運動の自由が奪われることがなく、ほとんど違和感なく容易に動き回ることができる。
【発明を実施するための最良の形態】
【0014】
本発明の実施形態について、図面を参照して説明する。尚、以下に説明する実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【0015】
図1は、本発明の第1の実施の形態に係る空圧ポンプを示す斜視図である。この空圧ポンプ100は、人の脛と足に取り付けられ、人の足踏み運動のエネルギを空気圧縮のエネルギに変換することにより作動するポンプである。空圧ポンプ100は、外部の例えばアキュムレータやエアージャッキ等(図示せず)に空気を圧送する空気圧縮装置110と、この空気圧縮装置110を作動させる運動変換装置130を備えている。尚、以下の説明では、図中の矢印aの方向を上下とする。
【0016】
空気圧縮装置110は、シリンダ111と該シリンダ111内でシリンダ111の軸方向に摺動するピストン112を有する。シリンダ111の下端111aからは、ピストン112のロッド112aが突出しており、シリンダ111の上端111bには、給排気部113が設けられている。この給排気部113は、例えばホース等の空気導管(図示せず)を介して上記アキュムレータやエアージャッキ等に接続される。給排気部113には、2系統の逆止弁(図示せず)が内蔵されている。即ち、シリンダ111外の空気をシリンダ111内に流入させ、シリンダ111内の空気はシリンダ111外に流出させない逆止弁と、シリンダ111内の空気は上記アキュムレータやエアージャッキ等に流出させ、シリンダ111外の空気はシリンダ111内に流入させない逆止弁が内蔵されている。
【0017】
運動変換装置130は、チャンネル材を矩形状に枠組みした第1枠部材131と第2枠部材132を有する。第1枠部材131の上辺部は、シリンダホルダ133としてシリンダ111の下端111aに連結されている。また、該シリンダホルダ133に対向する下辺部は、詳細は後述するが人の足で踏まれるステップ(足踏み部)134として設けられている。このステップ134は、側面視コの字状に形成されており、両端がステップホルダ135に回動軸ピン(図では左側のみ示す)134aを介して回動自在に軸支持されている。そして、各ステップホルダ135は、シリンダホルダ133の両端に直交するように各上端が固定されたスライダ(対向辺部)131a、131bの各下端に固定されている。
【0018】
また、詳細は後述するが、シリンダホルダ133とシリンダ111の下端111aの間には、人の脛の前側部に沿うように僅かに湾曲形成された脛取付具(脛取付装置)136が取り付けられ、更にこの脛取付具136には、図3に示す人の脛を取り付けるための脛取付ベルト(脛取付装置)137が取り付けられている。そして、ステップ134には、図3に示す人の足を取り付けるための足取付具(足取付装置)138が取り付けられている。
【0019】
第2枠部材132の上辺部は、ピストンホルダ139としてピストン112のロッド112aの下端112aaに連結されている。また、該ピストンホルダ139に対向する下辺部は、詳細は後述するが例えば地上に載置されて上記ステップ134が人の足で踏まれたときに該足踏み荷重を受けるベース(荷重受け部)140として設けられている。そして、ピストンホルダ139の両端に直交するように各上端が固定されたスライダガイド(対向辺部)132a、132bは、上記スライダ131a、131bの溝内に嵌め込まれている。これにより、スライダ131a、131bは、スライダガイド132a、132bに沿って溝方向(図示上下方向)に摺動自在となる。そして、各ステップホルダ135と各スライダ131a、131bの上端の間には、引張バネ(図では左側のみ示す)141の両端がそれぞれ係止されている。以上のような構成において、その組立手順について図2を参照して説明する。
【0020】
図2は、図1に示す空圧ポンプの分解斜視図である。ここで、第1枠部材131のシリンダホルダ133とスライダガイド131a、131bは、既に溶接もしくは接着等により接合済みであり、第2枠部材132のピストンホルダ139とスライダ132a、132bとベース140も、既に溶接もしくは接着等により接合済みである。
【0021】
シリンダ111の上端111bにシリンダ蓋111cを嵌め込んでネジ止めする。そして、シリンダ蓋111cを貫通している給排気口111dに給排気部113をねじ込む。また、脛取付具136にフェルトもしくはゴム等で成るパッド136aを接着する。このパッド136aは、空圧ポンプ100の作動時に人の脛を傷付けないようにするためのものである。そして、脛取付具136の支持部136bを第1枠部材131のシリンダホルダ133の取付穴133aに合わせ、シリンダ111の下端111aを支持部136bに通して取付穴133aに嵌合する。
【0022】
一方、ピストン112のロッド112aの下端112aaにピストン蓋112cを嵌合する。そして、ピストン蓋112cを第2枠部材132のピストンホルダ139の取付部139aに位置合わせしてネジ止めする。また、第2枠部材132のスライダガイド132a、132bの図示上部に穿設されているネジ穴132cにバネ係止ピン141aを螺合し、該バネ係止ピン141aに引張バネ141の一端を係止する。
【0023】
この第2枠部材132のスライダガイド132a、132bを、先に組み立てた第1枠部材131のスライダ131a、131bの溝内に下方から挿入する。そして、ピストン112のヘッド112bを、シリンダ111の下端111aから内部へ挿入する。また、ステップ134の両端にステップホルダ135を回動軸ピン134aにより取り付ける。そして、各ステップホルダ135をスライダ131a、131bの各下端にネジ止めする。以上により、図1に示す空圧ポンプ100が完成する。次に、その使用手順について説明する。
【0024】
図3は、図1に示す空圧ポンプを人が装着した状態を示す斜視図、図4(A)、(B)は、空圧ポンプの動作状態を示す斜視図である。
ここで、図3に示すように、ステップ133に取り付けられている足取付具138は、足先固定ベルト(足取付装置)138aと踵固定ベルト(足取付装置)138bを有する。足先固定ベルト138a及び踵固定ベルト138bは、共に2本のベルトで構成されており、各ベルトの一端はステップ133の両端に固定され、各ベルトの他端には図示しない面ファスナが付けられている。また、脛取付具136に取り付けられている脛取付ベルト137も、2本のベルトで構成されており、各ベルトの一端は脛取付具136の両端に固定され、各ベルトの他端には図示しない面ファスナが付けられている。
【0025】
先ず、作業者は、椅子等に腰を掛けた状態で、空圧ポンプ100のシリンダ111を持ってベース140を地面上に載置する。続いて、片脚を上げて足の裏側部をステップ133上に載置する。そして、足先と踵をステップ133に取り付けられている足先固定ベルト138aと踵固定ベルト138bで固定する。更に、脛の前側部を脛取付具136に押し当てる。そして、脛を脛取付具136に取り付けられている脛取付ベルト137で固定する。これにより、作業者と空圧ポンプ100を一体化することができるので、空圧ポンプ100の安定性を高めて使用し易くし、作業者は容易に動き回りながら空圧ポンプ100を使用することができる。
【0026】
以上により、作業者への空圧ポンプ100の装着が完了する。この状態では、図4(A)に示すように、第1枠部材131は、引張バネ141により引っ張られて第2枠部材132から離間した状態にある。次に、作業者が椅子から立ち上がると、作業者の荷重がステップ133に対し下方向に掛かることになるので、第1枠部材131は第2枠部材132に沿って降下(接近)する。そして、最終的には、図4(B)に示すように、第1枠部材131は、第2枠部材132と重なり合う。そして、給排気部113にアキュムレータやエアージャッキ等に接続されているホース等の空気導管を繋ぐ。
【0027】
続いて、作業者が脚を上げると、図4(A)に示すように、引張バネ141の復元力により第1枠部材131は第2枠部材132に沿って上昇(離間)する。このとき、シリンダ111も上昇するので、ピストン112がシリンダ111外の空気を給排気部113を介してシリンダ111内に吸引する。
【0028】
そして、作業者が脚を下げると、図4(B)に示すように、作業者の荷重がステップ133に下方向に掛かることになるので、第1枠部材131は第2枠部材132に沿って降下(接近)する。このとき、シリンダ111も降下するので、ピストン112がシリンダ111内の空気を圧縮して給排気部113からホース等の空気導管を介して外部のアキュムレータやエアージャッキ等に圧送する。
【0029】
以上のように、第1枠部材131と第2枠部材132が接近・離間して、作業者の足踏み運動がピストン112の往復運動に変換されるので、該足踏み運動を繰り返すことにより、シリンダ111内の空気を圧縮して給排気部113からホース等の空気導管を介して外部のアキュムレータやエアージャッキ等に間歇的に圧送することができる。尚、作業者が空圧ポンプ100を2台用意して両脚に装着していた場合には、空気の圧送を連続的に行うことができる。
【0030】
また、空気圧縮装置110はステップ133付近に位置する作業者の足首よりも上方に配置されることになる。従って、足首よりも下方の足先には重量のある構成要素は取り付けられないことになるため、足首の運動が不自由にならないので、作業者が長時間使用しても疲れ難いものとなる。更に、ステップ133は作業者の足首の動きに合わせて足の裏側部に追従するように回動するので、作業者の足先と踵を足先固定ベルト138aと踵固定ベルト138bでステップ133に固定していても作業者の足首の運動の自由が奪われることがなく、作業者は空圧ポンプ100を装着していてもほとんど違和感なく容易に動き回ることができる。
【0031】
尚、図4(B)に示す第1枠部材131と第2枠部材132が重なり合った状態で、図示しないストッパ(例えばピンと、該ピンを差し込み可能な第1枠部材131と第2枠部材132を貫通しているピン穴)により第1枠部材131と第2枠部材132を固定することにより、作業者は空圧ポンプ100を装着したまま通常通りに歩行することが可能となる。
【0032】
図5は、本発明の第2の実施の形態に係る空圧ポンプを示す斜視図である。この空圧ポンプ200は、人の脛と足に取り付けられ、人の足踏み運動のエネルギを空気圧縮のエネルギに変換するものであり、基本的には図1に示す空圧ポンプ100と同一構成であるため、同一点は同一番号を付してそれらの説明を省略し、相違点のみを説明する。空圧ポンプ200は、外部の例えばアキュムレータやエアージャッキ等(図示せず)に空気を圧送する空気圧縮装置210と、この空気圧縮装置210を作動させる運動変換装置130を備えている。
【0033】
空気圧縮装置210は、3台のシリンダ211a、211b、211cと該シリンダ211a、211b、211c内でシリンダ211a、211b、211cの軸方向に摺動するピストン212a、212b、212cを有する。図示中央に配置されているシリンダ211a及びピストン212aは、図1に示す空圧ポンプ100のシリンダ111及びピストン112と同様に動作するが、図示両側に配置されているシリンダ211b、211c及びピストン212b、212cは、外部に圧送された空気の負荷に感応して動作する。
【0034】
即ち、外部に圧送された空気の負荷に感応して、ピストン212b、212cと第2枠部材132のピストンホルダ139との連結を解除して、ピストン212b、212cをピストンホルダ139に穿設されているピストン穴215から突出させる連結解除装置220を備えている。これにより、空圧ポンプ200の作動初期には全てのシリンダ211a、211b、211c及びピストン212a、212b、212cで多量の空気を圧送することができるため、人の足踏み運動時間を短縮させることができる。また、空圧ポンプ200の作動後期には外部に圧送された空気の圧力の上昇に感応し、連結解除装置220が作動して連結が解除され、1台のシリンダ211a及びピストン212aで空気を圧送することになるため、人の足踏み運動荷重が過大になることを防ぐことができる。
【0035】
図6は、連結解除装置の一例を示す図である。この連結解除装置220は、ピストン212b(212c)のロッド212ba(212ca)を周面両側から係止する2つのスリッパ(係止部材)221と、各スリッパ221をロッド212ba(212ca)の周面方向(係止方向)に付勢する2つの圧縮バネ(付勢部材)222を備えている。スリッパ221は、カムフォロア223と、このカムフォロア223を一端で回動自在に軸支持するアーム224を有する。2つのカムフォロア223は、ロッド212ba(212ca)の周面に対向するように設けられている円弧面状のカム溝225に嵌り込むことが可能になっている。アーム224の他端は、ピストンホルダ139に回動自在に軸支持されている。これにより連結解除装置220を簡易な構成とすることができるので、空圧ポンプ100の重量増加やコスト増を抑えることができる。このような構成において、その動作を図6及び図7(A)、(B)、(C)を参照して説明する。
【0036】
図7(A)、(B)、(C)は、空圧ポンプの動作状態を示す斜視図である。
作業者は、図1に示す空圧ポンプ100と同様の手順で空圧ポンプ200を装着する。この状態では、図7(A)に示すように、第1枠部材131は、引張バネ141により引っ張られて第2枠部材132から離間した状態にある。次に、作業者が椅子から立ち上がると、作業者の荷重がステップ133に対し下方向に掛かることになるので、第1枠部材131は第2枠部材132に沿って降下(接近)する。このとき、カムフォロア223はカム溝225に嵌り込んで、圧縮バネ222がアーム224を付勢しているので、ロッド212ba、212caとピストンホルダ139は連結状態にある。従って、3台のピストン212a、212b、212cはそのままの状態で、3台のシリンダ211a、211b、211cが降下する。そして、最終的には、図7(B)に示すように、第1枠部材131は、第2枠部材132と重なり合う。そして、給排気部213a、213b、213cにアキュムレータやエアージャッキ等に接続されているホース等の空気導管を繋ぐ。
【0037】
続いて、作業者が脚を上げると、図7(A)に示すように、引張バネ141の復元力により第1枠部材131は第2枠部材132に沿って上昇(離間)する。このときも、カムフォロア223はカム溝225に嵌り込んで、圧縮バネ222がアーム224を付勢しているので、ロッド212ba、212caとピストンホルダ139は連結状態にある。従って、3台のシリンダ211a、211b、211cも上昇するので、3台のピストン212a、212b、212cが3台のシリンダ211a、211b、211c外の空気を給排気部213a、213b、213cを介してシリンダ211a、211b、211c内に吸引する。
【0038】
そして、作業者が脚を下げると、図7(B)に示すように、作業者の荷重がステップ133に下方向に掛かることになるので、第1枠部材131は第2枠部材132に沿って降下(接近)する。このときも、カムフォロア223はカム溝225に嵌り込んで、圧縮バネ222がアーム224を付勢しているので、ロッド212ba、212caとピストンホルダ139は連結状態にある。従って、3台のシリンダ211a、211b、211cも降下するので、3台のピストン212a、212b、212cが3台のシリンダ211a、211b、211c内の空気を圧縮して給排気部213a、213b、213cを介して外部のアキュムレータやエアージャッキ等に圧送する。このように、空圧ポンプ200の作動初期には全てのシリンダ211a、211b、211c及びピストン212a、212b、212cで多量の空気を圧送することができるため、人の足踏み運動時間を短縮させることができる。
【0039】
その後、外部のアキュムレータやエアージャッキ等に圧送された空気の負荷が増加してくると、作業者が脚を下げたときのロッド212ba、212caに働く軸方向の力Frodが、カムフォロア223をカム溝225に押し付ける力Fcamよりも大きくなるときがくる。
【0040】
ここで、図6に示すように、カムフォロア223とカム溝225の接触角(接触角が0はカム溝225が無い場合ととる)をθとすると、カムフォロア223をカム溝225に押し付ける力Fcamとロッド212ba、212caに働く軸方向の力Frodには、Fcam=(1/tanθ)・Frodの関係がある。θが小さいと(1/tanθ)は大きくなるので、カムフォロア223がカム溝225から外れないようにするには圧縮バネ222のバネ定数を大きくする必要がある。尚、θが0のときは(1/tanθ)も0であるため、Fcamが0でもロッド212ba、212caは動かない。
【0041】
このように、ロッド212ba、212caに働く軸方向の力Frodが、カムフォロア223をカム溝225に押し付ける力Fcamよりも大きくなったときに、カムフォロア223がカム溝225から外れるので、ピストン212b、212cとピストンホルダ139の連結が解除される。従って、図7(C)に示すように、3台のシリンダ211a、211b、211cの降下に伴って、2台のピストン212b、212cも降下してしまうので、1台のピストン212aのみが1台のシリンダ211a内の空気を圧縮して給排気部213aを介して外部のアキュムレータやエアージャッキ等に圧送する。このように、空圧ポンプ200の作動後期には外部に圧送された空気の負荷に感応した数、例えば1台のシリンダ211a及びピストン212aで空気を圧送することになるため、人の足踏み運動荷重を軽減させることができる。
【0042】
尚、上述した第2の実施形態では、3台のピストン212a、212b、212cと3台のシリンダ211a、211b、211cを備えた空気圧縮装置210としたが、2台以上であれば配置可能な範囲で特に限定されるものではない。
【図面の簡単な説明】
【0043】
【図1】本発明の第1の実施の形態に係る空圧ポンプを示す斜視図である。
【図2】図1に示す空圧ポンプの分解斜視図である。
【図3】図1に示す空圧ポンプを人が装着した状態を示す斜視図である。
【図4】図1に示す空圧ポンプの動作状態を示す斜視図である。
【図5】本発明の第2の実施の形態に係る空圧ポンプを示す斜視図である。
【図6】図5の連結解除装置の一例を示す図である。
【図7】図5に示す空圧ポンプの動作状態を示す斜視図である。
【符号の説明】
【0044】
100、200 空圧ポンプ、110、210 空気圧縮装置、111、211a、211b、211c シリンダ、112、212a、212b、212c ピストン、112a、212aa、212ba、212ca ロッド、112b ヘッド、113 給排気部、130 運動変換装置、131 第1枠部材、131a、131b スライダ、132 第2枠部材、132a、132b スライダガイド、133 シリンダホルダ、134 ステップ、134a 回動軸ピン、135 ステップホルダ、136 脛取付具、137 脛取付ベルト、138 足取付具、139 ピストンホルダ、140 ベース、141 引張バネ、220 連結解除装置、221 スリッパ、222 圧縮バネ、223 カムフォロア、224 アーム
【特許請求の範囲】
【請求項1】
シリンダと該シリンダ内で摺動して空気を圧縮するピストンとを有する空気圧縮装置と、
矩形状に枠組みされており、一辺部が前記シリンダに連結され、該一辺部に対向する他辺部が人の足で踏まれる足踏み部として設けられている第1枠部材、及び矩形状に枠組みされており、一辺部が前記ピストンに連結され、該一辺部に対向する他辺部が足踏み荷重を受ける荷重受け部として設けられ、他の対向辺部が前記第1枠部材の他の対向辺部に沿って摺動可能な第2枠部材を有し、人の足踏み運動により前記第1枠部材と前記第2枠部材が接近・離間して、該足踏み運動を前記ピストンの往復運動に変換する運動変換装置とを備えたことを特徴とする空圧ポンプ。
【請求項2】
シリンダと該シリンダ内で摺動して空気を圧縮するピストンとを有する少なくとも2台の空気圧縮装置と、
矩形状に枠組みされており、一辺部が前記シリンダに連結され、該一辺部に対向する他辺部が人の足で踏まれる足踏み部として設けられている第1枠部材、及び矩形状に枠組みされており、一辺部が前記ピストンに連結され、該一辺部に対向する他辺部が足踏み荷重を受ける荷重受け部として設けられ、他の対向辺部が前記第1枠部材の他の対向辺部に沿って摺動可能な第2枠部材を有し、人の足踏み運動により前記第1枠部材と前記第2枠部材が接近・離間して、該足踏み運動を前記ピストンの往復運動に変換する運動変換装置と、
外部に圧送された空気の負荷に感応して、前記第2枠部材の一辺部と少なくとも1台の前記空気圧縮装置のピストンとの連結を解除する連結解除装置とを備えたことを特徴とする空圧ポンプ。
【請求項3】
前記連結解除装置が、前記ピストンを係止・係止解除する係止部材と、該係止部材を係止方向に付勢する付勢部材とを備えたことを特徴とする請求項2に記載の空圧ポンプ。
【請求項4】
前記空気圧縮装置を人の脛の前側部に取り付ける脛取付装置を備えたことを特徴とする請求項1〜3の何れか一項に記載の空圧ポンプ。
【請求項5】
前記運動変換装置の足踏み部を人の足の裏側部に取り付ける足取付装置を備えたことを特徴とする請求項1〜4の何れか一項に記載の空圧ポンプ。
【請求項6】
前記運動変換装置の足踏み部が、人の足の回動方向に回動自在となるように前記第1枠部材の他の対向辺部端部に設けられていることを特徴とする請求項1〜5の何れか一項に記載の空圧ポンプ。
【請求項1】
シリンダと該シリンダ内で摺動して空気を圧縮するピストンとを有する空気圧縮装置と、
矩形状に枠組みされており、一辺部が前記シリンダに連結され、該一辺部に対向する他辺部が人の足で踏まれる足踏み部として設けられている第1枠部材、及び矩形状に枠組みされており、一辺部が前記ピストンに連結され、該一辺部に対向する他辺部が足踏み荷重を受ける荷重受け部として設けられ、他の対向辺部が前記第1枠部材の他の対向辺部に沿って摺動可能な第2枠部材を有し、人の足踏み運動により前記第1枠部材と前記第2枠部材が接近・離間して、該足踏み運動を前記ピストンの往復運動に変換する運動変換装置とを備えたことを特徴とする空圧ポンプ。
【請求項2】
シリンダと該シリンダ内で摺動して空気を圧縮するピストンとを有する少なくとも2台の空気圧縮装置と、
矩形状に枠組みされており、一辺部が前記シリンダに連結され、該一辺部に対向する他辺部が人の足で踏まれる足踏み部として設けられている第1枠部材、及び矩形状に枠組みされており、一辺部が前記ピストンに連結され、該一辺部に対向する他辺部が足踏み荷重を受ける荷重受け部として設けられ、他の対向辺部が前記第1枠部材の他の対向辺部に沿って摺動可能な第2枠部材を有し、人の足踏み運動により前記第1枠部材と前記第2枠部材が接近・離間して、該足踏み運動を前記ピストンの往復運動に変換する運動変換装置と、
外部に圧送された空気の負荷に感応して、前記第2枠部材の一辺部と少なくとも1台の前記空気圧縮装置のピストンとの連結を解除する連結解除装置とを備えたことを特徴とする空圧ポンプ。
【請求項3】
前記連結解除装置が、前記ピストンを係止・係止解除する係止部材と、該係止部材を係止方向に付勢する付勢部材とを備えたことを特徴とする請求項2に記載の空圧ポンプ。
【請求項4】
前記空気圧縮装置を人の脛の前側部に取り付ける脛取付装置を備えたことを特徴とする請求項1〜3の何れか一項に記載の空圧ポンプ。
【請求項5】
前記運動変換装置の足踏み部を人の足の裏側部に取り付ける足取付装置を備えたことを特徴とする請求項1〜4の何れか一項に記載の空圧ポンプ。
【請求項6】
前記運動変換装置の足踏み部が、人の足の回動方向に回動自在となるように前記第1枠部材の他の対向辺部端部に設けられていることを特徴とする請求項1〜5の何れか一項に記載の空圧ポンプ。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−41404(P2009−41404A)
【公開日】平成21年2月26日(2009.2.26)
【国際特許分類】
【出願番号】特願2007−205735(P2007−205735)
【出願日】平成19年8月7日(2007.8.7)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
【公開日】平成21年2月26日(2009.2.26)
【国際特許分類】
【出願日】平成19年8月7日(2007.8.7)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
[ Back to top ]