
空容器回収装置
【課題】不正行為を防止し、更に、安全にデポジット或いは特典を付与することができる空容器回収装置を提供する。
【解決手段】投入口2から投入され回収される空容器aに対しデポジット或いは特典を付与する空容器回収装置において、前記投入された空容器を仕分ける送り手段8と、前記送り手段が配置されている領域における空容器の有無を検知する第一の容器検知手段9と、前記送り手段8の動作後、前記第一の容器検知手段9により空容器が検知されたとき前記デポジット或いは特典の付与をせず、前記送り手段8の動作後、前記第一の容器検知手段9により空容器が検知されないとき前記デポジット或いは特典の付与をする制御手段と、を備える。
【解決手段】投入口2から投入され回収される空容器aに対しデポジット或いは特典を付与する空容器回収装置において、前記投入された空容器を仕分ける送り手段8と、前記送り手段が配置されている領域における空容器の有無を検知する第一の容器検知手段9と、前記送り手段8の動作後、前記第一の容器検知手段9により空容器が検知されたとき前記デポジット或いは特典の付与をせず、前記送り手段8の動作後、前記第一の容器検知手段9により空容器が検知されないとき前記デポジット或いは特典の付与をする制御手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、飲料水などが収容されていた缶やPETボトル等の空容器を回収する空容器回収装置に関し、特に、空容器の回収に対しデポジットや特典が付与される空容器回収装置に関する。
【背景技術】
【0002】
飲料水などが収容されていた缶やPETボトル等の空容器を回収する装置が存在する。そして、その空容器回収装置として、装置に投入された空容器を仕分けし、実際に空容器が減容された場合、データ上では空容器を受け入れたと判断してデポジット額を発生する装置がある。
【0003】
前記装置では、実際に空容器が減容されたことに基づきデポジット額を生成するので、通常、減容手段の近く(例えば、手前位置)に空容器の通過を検知するセンサを配置し、該センサの検知範囲を空容器が通過することで、前記センサの後段直後に配置された減容手段で減容されたと判断している。
【0004】
しかし、前記したように空容器がセンサの検知エリアを通過することでデポジット額を発生することを、装置を操作する人が経験的に知った場合、例えば、空容器に紐等を結び、その空容器を投入口より投入し、該容器がセンサで検知されたタイミング(センサで検知後減容手段に供給される前)で前記紐を引いて前記空容器を投入口側にひき戻し、再度同じ空容器を投入し同様の操作を繰り返すことで、同じ空容器で何回もデポジットを取得する不正行為の虞れがあった。
【0005】
この不正行為の問題に対して、空容器を装置内へ投入する投入口にシャッタを設け、一旦装置内に投入した空容器は投入口に引き戻せないようにすることも考えられるが、この場合、開閉式のシャッタが使用者の目の前に位置することになり、誤って指や手等が挟まることが懸念されるため、安全面から投入口にシャッタ等を設けないようにすることが求められていた。
尚、前記デポジットと同様に、装置に投入された空容器に応じてポイントや特典を付与する回収装置においても、前記デポジットと同様であった。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−182805号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は上記従来の技術が有する問題点に鑑みてなされたもので、不正行為を防止し、更に、安全にデポジット或いは特典を付与することができる空容器回収装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために本発明の空容器回収装置は、投入口から投入され回収される空容器に対しデポジット或いは特典を付与する空容器回収装置において、前記投入された空容器を後段に送る送り手段と、前記送り手段が配置されている領域における空容器の有無を検知する第一の容器検知手段と、前記送り手段の動作後、前記第一の容器検知手段により空容器が検知されたとき前記デポジット或いは特典の付与をせず、前記送り手段の動作後、前記第一の容器検知手段により空容器が検知されないとき前記デポジット或いは特典の付与をする制御手段と、を備えることを特徴とする。
【0009】
前記送り手段の動作後とは、該送り手段の作動開始後の何れのタイミングでもよい趣旨である。具体的には、例えば、送り手段が初期位置から所定位置まで移動する送り手段で、空容器を該送り方向へ送る送り手段の場合、該送り手段が前記初期位置から所定位置まで移動する間、あるいは、所定位置から初期位置に戻る間、あるいは初期位置に戻ったときの何れのタイミングでもよい。
【0010】
上記手段によれば、投入された空容器が送り手段の移動(作動)で送られた後に、第一の容器検知手段が「容器有り」を検出したときは、送り手段により空容器が移動されたにも拘らず、該空容器が不正行為、例えば投入した空容器に紐等を連結して該容器を引き戻した疑いがあるので、デポジット或いは特典の付与をしない。
【0011】
また、例えば、第一の容器検知手段が、送り手段の付近を撮像するカメラであった場合、空容器が送り手段付近から消えていく画像は、送り手段の作動時における通常の画像であるが、一旦、送り手段位置付近の画像から消えた空容器が、再び画像に現れた場合には、不正により引き戻されたと判断することができる。
また、前記第一の容器検知手段が、前記送り手段における計量器の場合には、一旦、空容器が送り手段の作動で送られて減った計量値が増えている場合には、不正により空容器が引き戻されたと判断することができる。
【0012】
一方、送り手段により空容器が送られた後に、前記第一の容器検知手段により空容器が検知されないときは、空容器が間違いなく仕分け回収できたと判断され、制御手段がデポジット或いは特典を付与する。
以上のように、送り手段の送りが開始後、送り手段が配置されている領域で空容器が検知されたか否かを判断し、いずれのタイミングでも空容器が検知されない場合は、空容器を正しく回収できたと判断され、付与手段がデポジット或いは特典を付与する。逆に送り手段の動作後、いずれかの過程、タイミングで空容器が検知された場合には、デポジット或いは特典を付与しないよう制御する。
また、従来は、減容手段の近傍に設けられるセンサで空容器を検知しているので、該センサが空容器内の飲み残し等により汚れ、頻繁なメンテナンスが必要であるが、前記のように送り手段により容器を送った後、送り手段が送り位置へ移動する過程、また、初期位置へ戻る過程、更に、初期位置における空容器の有無を判断するので、前記送り手段を減容手段の前段に配置し、減容手段とは離れた位置に配置できるので、空容器が潰された際に飛び散る液体等があったとしても影響を与えることがなく頻繁なメンテナンスは必要ない。
【0013】
また、本装置は前記投入された空容器の種別を検知する種別検知手段を備え、その種別検知手段の種別情報に基づき種別毎に仕分けて後段へ送るように作動するようにしてもよい。つまり、送り手段が仕分けをして後段へ空容器等を送る仕分け機能を兼ねるようにしてもよい。
前記種別検知手段は、例えば、PETボトルと缶、或いはアルミ缶とスチール缶等を判別する。その検知手段としては、容器に貼付されているバーコードから容器の種別情報を読み取り判別する方法、容器を撮影し画像より種別を判別する方法、或いは金属検知器を設けて、金属系の容器と、その他の容器とを判別する方法等が挙げられ、回収対象の容器に合わせて最適な方法を選択する。また、前記読み取ったバーコードから投入された空容器が、当該店舗にて回収対象の容器であるか否かを同時に判断するようにしてもよい。つまり、当該店舗で販売している商品か否かを判断し、当該店舗で扱っていないボトルは受け付けないようにしてもよい。また、該バーコードとは別のマークが付されたシール等を検知するか否かにより、回収すべきか否かを判断するようにしてもよい。
【0014】
前記第一の容器検知手段は、前記仕分け手段(送り手段)が配置されている領域における空容器の有無を検知できるものであればよく、例えば、光学センサ、カメラ等が挙げられるが、更に、重量を計量する計量手段で構成してもよい。計量手段で第一の容器検知手段を構成した場合は、センサ等と異なり、検知手段が汚れて誤検知するのを防止できる。
また、光学センサ等で仕分け手段(送り手段)の初期位置における空容器の有無を検知する場合、該仕分け手段(送り手段)は減容手段より上流で離れている位置に配置されているので、空容器が減容された(潰された)際に飛び散る液体等が該センサに付着せず、従って該センサが汚れることがなく、頻繁なメンテナンスは必要なくなる。
また、計量手段(計量器)で空容器があるか否かを判断する場合、例えばロードセル式の計量器で物の重さを判断する場合、物を計量部に載せた場合、出力される重量値が安定するまでには一定の時間がかかる。しかし、本発明の第一の容器検知手段では、空容器の正確な重量を計量する必要はないので、空容器が仕分けられ、計量器から出力される重量値がゼロになり、その後に、不正により空容器が戻された場合は、空容器が計量器に載ることで、計量器から一定の重量でないにしろ重量が出力されるようになる、このような状態を把握することで、仕分けられた後に、空容器が検知されたと判断することが可能になる。
【0015】
また、前記計量手段の略直上に前記仕分け手段(送り手段)が位置している。これにより、空容器が不正行為等により戻されたときには、必ず仕分け手段の下方に位置する計量手段により、その空容器の重量が検知されるので確実に空容器があることを検知することができるので、不正行為等によりデポジットや特典を付与してしまうことを確実に防ぐことができる。
【0016】
また、前記投入口から投入された空容器を装置内へ案内する搬送路と、該搬送路を通る空容器を検知する第二の容器検知手段と、を有し、前記送り手段が前記搬送路の後段に設けられ、前記送り手段が動作している間に、前記第二の容器検知手段により空容器が検知されたとき、前記デポジット或いは特典の付与をしないように制御してもよい。
つまり、送り手段(仕分け手段)により、空容器が送られている(仕分けされている)間に搬送路を通る空容器が検出された場合には、空容器が引き戻されたと判断し、デポジット或いは特典の付与をしないことで不正によるデポジット、あるいは特典の付与を防止することができる。
また、前記第二の容器検知手段は、容器が移動する向きを更に検知し、前記空容器が装置内から前記投入口へ移動すると判断されたとき、前記デポジット或いは特典の付与をしないよう制御してもよい。つまり、前記のように、送り手段(仕分け手段)により空容器が送くられている時に搬送路を通る空容器を検知した場合には、不正とみなすこともできるが、搬送される空容器の向きを検知して、装置内から投入口へ移動する空容器が検知された場合には、空容器が引き戻されたと判断し、デポジットや特典を付与しないようにすることができる。換言すれば、搬送路を通過する空容器が検知されても、空容器の順方向への移動、つまり、投入口から装置内への移動であれば、次の空容器が投入されたと判断することで、前のデポジットや特典付与の処理の完了を待たずに、次の空容器の投入を許容することができるので、単位時間当たりの空容器の処理量を多くすることができる。
【発明の効果】
【0017】
本発明の空容器回収装置は、送り手段(仕分け手段)の動作後における第一の容器検知手段の出力信号(検知情報)に基づいて、デポジット或いは特典の付与を決定するので、不正行為によるデポジット或いは特典の取得を防止し、安全な空容器回収装置を提供できる。
【図面の簡単な説明】
【0018】
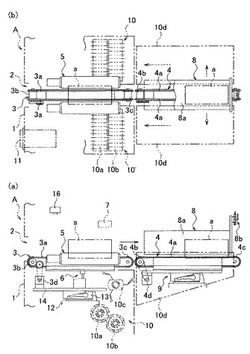
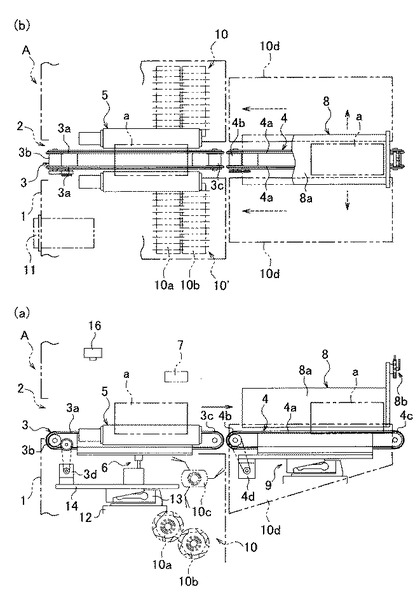
【図1】本発明に係る空容器回収装置の実施の形態の一例を示す概略図で、(a)は側面図、(b)は平面図。
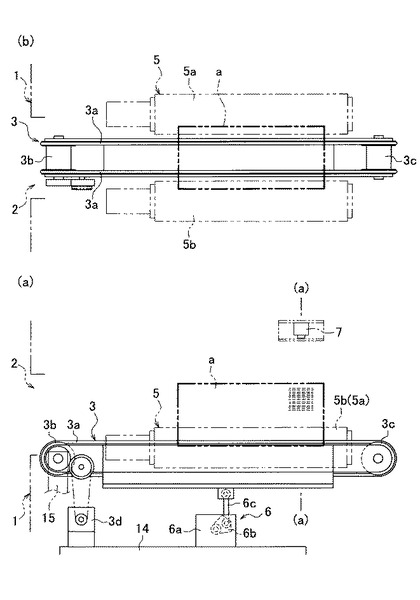
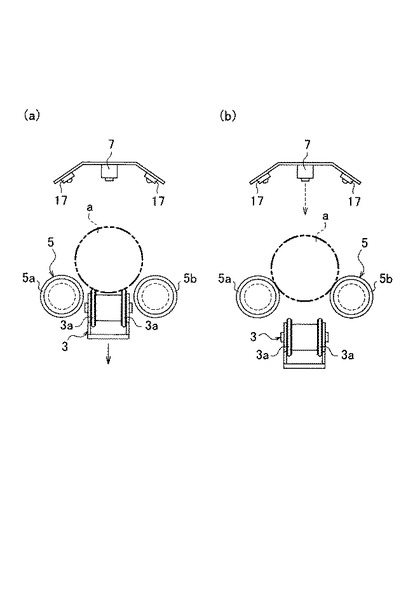
【図2】前部搬送手段及び転動支持手段部分の拡大図で、(a)は側面図、(b)は同平面図
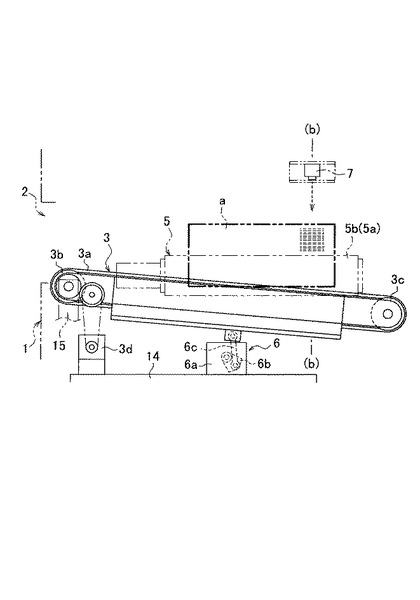
【図3】前部搬送手段を降下した状態の同側面図。
【図4】(a)は図2の(a)−(a)線に沿える断面図、(b)は図3の(b)−(b)線に沿える断面図。
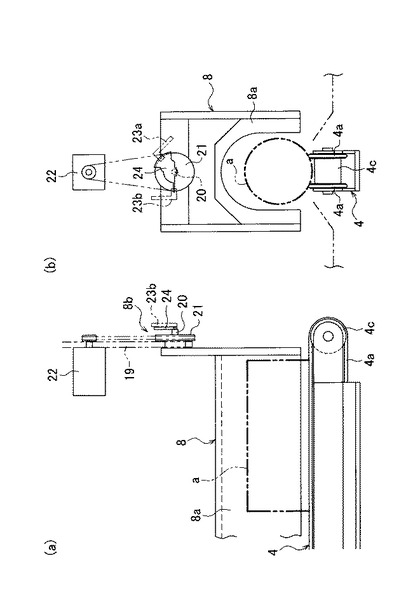
【図5】後部搬送手段上に配置した仕分け手段を示し、(a)は側面図、(b)は同背面図。
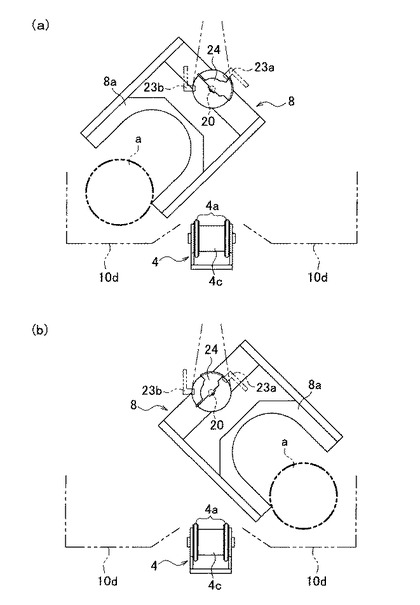
【図6】仕分け手段の作動状態を示す背面図で、(a)は振分け枠が後部搬送手段の右側の仕分け位置に移動した状態、(b)は振分け枠が後部搬送手段の左側の仕分け位置に移動した状態。
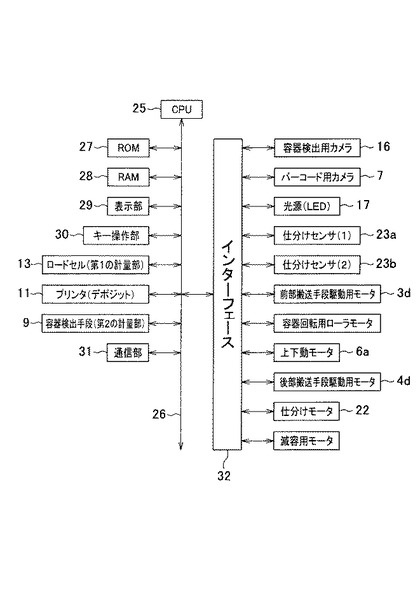
【図7】同装置の動作を制御する構成部材の電気ブロック図。
【図8】回収処理の流れを示すフローチャート図。
【発明を実施するための形態】
【0019】
以下、本発明に係る空容器回収装置の実施の形態の一例を図面に基づいて説明する。
図1は空容器回収装置Aの概略を示し、1は容器回収装置Aのケース、2は前記ケース1の前面に開設された空容器aの投入口で、該ケース1内には前記投入口2から投入された空容器aを装置内に搬入する前部搬送手段(搬送路)3,後部搬送手段4、前部搬送手段3で搬入された空容器をバーコード読み取り位置に支持する転動支持手段5、前部搬送手段3から前記転動支持手段5に空容器aを載せ替えるために前記前部搬送手段3を上下揺動させる上下移動手段6、前記転動支持手段で支持される空容器aに表示(貼付)されたバーコード(種別)を読み取るバーコード用カメラ(種別検知手段)7、前記バーコードカメラ(種別検知手段)7で種別検知が終わり後部搬送手段4上に搬送された空容器aを、前記バーコードカメラ(種別検知手段)7の検知情報に基づき仕分ける仕分け手段(送り手段)8、前記仕分け手段(送り手段)8の初期位置における空容器の有無を検知する計量器(第一の容器検知手段)9、前記仕分け手段(送り手段)8で仕分けられた空容器を減容処理する減容手段10,10’、回収した空容器に対してデポジット或いは特典のチケットを発行するプリンタ11等が装備されている。
【0020】
ケース1の投入口2から投入された空容器(PETボトル、アルミ缶、スチール缶等)aを装置内に搬入する搬送装置は、空容器aをバーコード用カメラ(種別検知手段)7による読み取り可能位置まで搬送する前部搬送手段3と、種別検知が終わった空容器aを種別検知の検知情報に基づいて作動する仕分け手段(送り手段)8の仕分け領域に搬送する後部搬送手段4とで構成されている。
前部搬送手段3は、断面円形の無端状ベルト3aを、駆動プーリ3bと従動プーリ3cとに亘り所定間隔(筒状の空容器を二点で支持する間隔)を置いて2本平行に巻回したベルトコンベアで構成され、前記駆動プーリ3bはモータ3dの回転が動力伝達手段を介し伝達され、駆動回転されるように構成されている。
そして、搬送面を構成する無端状ベルト3aの表面は、後述する転動支持手段5を構成するローラの表面(アルミ材)における摩擦抵抗より大きい材質、例えば、ウレタン樹脂、或いは塩化ビニル樹脂等で構成されている。
また、その前部搬送手段3は、ケース1内に架設した基台12上にロードセル13を介して支持した取付台14上に上下揺動可能に載置されている。
【0021】
前部搬送手段3の支持は、搬送始端側である駆動プーリ3bの軸端を取付台14上に起立した起立枠15で回動可能に支持し、前部搬送手段3の機長方向の略中央位置が、取付台14上に設置した上下移動手段6で支持されている。
上下移動手段6は、モータ6aとそのモータの出力軸に取り付けた偏心回転板6bと偏心回転板6bと前記前部搬送手段3を連結するアーム6cとで構成され、モータ6aが作動することでアーム6cが揺動し、それにより前部搬送手段3が搬送始端(駆動プーリ3b)側を支点として搬送終端(従動プーリ3c)側が上下される。尚、この上下移動手段6は、図示の構成に限定されず、搬送始端側を支点として反対側を上下し得る方法であれば何れの方式でもよい。
【0022】
また、前記前部搬送手段3の始端側上部には空容器aの投入を検出する容器検出用カメラ(第二の容器検知手段)16が設置されている。容器検出用カメラ16による撮像で空容器aの投入の有無及び投入された空容器aの搬送状態(位置)を判断する。前記判断は、撮像した画像の領域をマトリックス状に区分けし、位置を識別する。具体的には、空容器aの長さ方向、高さ方向の各領域の画像を一定のしきい値により二値化して各領域の像の有無により判断する。そして、この容器検出用カメラ16の画像データの判断に基づいて前記前部搬送手段3の駆動/停止が制御される。そして、容器検出用カメラ16は、搬送手段3上の領域全てを撮像することができ、前記のようにマトリックス状に区分けし、空容器の位置を検出することができるので、該マトリックス状のどの位置から空容器を検知したかを把握することができる。つまり、上流方向から像が生じたと判断した場合には空容器の移動方向が順方向、即ち、投入口から装置内へ空容器が移動したと判断することができる。逆に、下流方向から像が生じたと判断された場合には、空容器の移動方向が逆方向、即ち、装置内から投入口方向へ空容器が移動したと判断することができる。
また、前記容器検出用カメラ16による撮像を鮮明に行うために照明の光源(LED)17が配置されている。
【0023】
転動支持手段5は、前記前部搬送手段3を構成する無端状ベルト3aを挟んで左右両側に水平に配置した2本のローラ5a,5bと、その2本のローラ5a,5bを回転させるモータ(図示省略)と、そのモータの回転を前記2本のローラ5a,5bに伝達する動力伝達部材(図示省略)とで構成されている。尚、動力伝達部材は、前記2本のローラ5a,5bが同一方向に回転するように構成されている。
【0024】
また、この転動支持手段5のローラ5a,5bは、前記前部搬送手段3の機長の中程位置から終端側手前位置までの長さを有しており、投入される缶及びPETボトル等の空容器の全長を安定よく支持し得るようになっている。尚、転動支持手段5を構成する2本のローラ5a,5bは、前記前部搬送手段3による搬送時、2本のローラのうちの何れか1本が空容器と接触している。
そして、前記前部搬送手段3が上下移動手段6によって前方下向きに傾斜下降されると、それまで無端状ベルト3aと2本のローラ5a,5bの片方の二点で支持されていた空容器は、無端状ベルト3aによる支持がなくなることで2本のローラ5a,5bによる二点支持に切り替わり、ローラの回転によって転動されることになる。
【0025】
バーコード用カメラ(種別検知手段)7は、投入された空容器aの周面に表示されているバーコードを読み取るもので、前記転動支持手段5の上方位置に、転動支持手段5の方向に向けて設置されている。尚、このバーコード用カメラ(種別検知手段)7は、所定角度に固定してもよいが、首振り回動式、スライド式等として、読み取り可能範囲を拡大するようにしてもよい。また、バーコード用カメラ7の台数は、1台に限らず、複数台でもよいものである。
このバーコード用カメラ(種別検知手段)7によるバーコードの読み取りは、バーコード用カメラにて空容器aのバーコードが検知され、そのデータを、制御部のデータベースに格納されているデータと比較して処理される。例えば、PETボトルの場合であれば、PETボトルの色情報、PETボトルの商品の名称、PETボトルの空の重量値に対する基準重量値(空のボトルの重量よりも若干重い重量が設定され、飲み残しの有無の判断に利用される)、ボトルにより付与すべきデポジット額等が読み出される。尚、デポジットシステムに対応する装置においては、仮に投入された空容器aがデポジット対象でない空容器である場合は、容器の回収は行うが、デポジットの付与を行わないようにすることも可能である。
【0026】
前記バーコード用カメラ(種別検知手段)7による検知が完了すると、空容器aは前記転動支持手段5から再び前部搬送手段3に移載され、その前部搬送手段3の駆動で後部搬送手段4に供給され、該後部搬送手段4の駆動で空容器aは仕分け手段8の初期位置に搬送される。
後部搬送手段4は、前記前部搬送手段3と同様、断面円形の無端状ベルト4aを、駆動プーリ4bと従動プーリ4cとに亘り所定間隔(筒状の空容器を二点で支持する間隔)を置いて2本平行に巻回したベルトコンベアで構成され、前記駆動プーリ4bはモータ4dの回転が動力伝達手段を介し伝達され、駆動回転されるように構成されている。
そして、搬送面を構成する無端状ベルト4aは、空容器aを安定して搬送し得るように摩擦係数の大きい材質、例えば、ウレタン樹脂、或いは塩化ビニル樹脂等で構成されている。
また、後部搬送手段4は、前記仕分け手段(送り手段)8の初期位置における空容器の有無を検出する計量器(第一の容器検知手段)9を介して支持されている。即ち、後部搬送手段4は、ケース1内に架設した基台12上に、計量器(第一の容器検知手段)9を介して支持した取付台18上に載置されている。これにより、仕分け手段8の初期位置(後部搬送手段4が空容器を載承支持する位置)における該仕分け手段8の仕分け位置から初期位置へ移動した時の重量変化を検出でき、計量器9の計量値に変化(仕分け手段の動作前における計量値>仕分け手段の動作後の計量値)があれば、空容器は正しく仕分け回収されたと判断でき、逆に仕分け手段8の動作前後における計量器9の計量値に変化がなければ、空容器は正しく仕分け回収されず、不正行為が行われたものと判断される。
【0027】
前記仕分け手段(送り手段)8は、図5に示すように、金属板或いは樹脂板等によって前後面(後部搬送手段4で搬送される空容器の前後面と対応する面)及び下面(後部搬送手段4で搬送される空容器の下半部外周面と対応する面)が開放され、前記後部搬送手段4に載承支持される空容器aを挟むよう対向する一対の壁部を有する断面略門型の振分け枠8aと、その振分け枠8aを左右方向に揺動させる揺動機構8bとで構成され、前記後部搬送手段4の直上に位置し、後部搬送手段4の機長方向略全ての範囲を覆い左右方向に揺動可能に支持されている。
左右方向への揺動は、後部搬送手段3上に支持されている空容器aを、前記バーコード用カメラ(種別検知手段)7の検知情報に基づいて前記後部搬送手段4の左右両側に配置した減容手段10,10’に振り分けるもので、ケース1内に垂下固着した取付板19に前記振分け枠8aの長手方向の先端側上部中央が軸20で揺動可能に軸支されている。
【0028】
前記揺動機構8bは、カムなどの揺動手段21と、その揺動手段21を駆動するモータ22とで構成されている。そして、前記振分け枠8aは前記揺動機構8bによって前記後部搬送手段4上に略垂直状態で垂下する初期位置から、前記バーコード用カメラ(種別検知手段)7の検知情報に基づいて左方向又は右方向の仕分け位置に揺動される。
前記振分け枠8aの揺動位置の検出は、該振分け枠8aの初期位置を検出する仕分けセンサ(1)23a、仕分けセンサ(2)23bが固定フレームに取り付けられ、フラグ24が前記振分け枠8aの軸20に固着されている。これにより、仕分けセンサ(1)23a、仕分けセンサ(2)23bがフラグ24で遮られていれば振分け枠8aは初期位置に位置し、前記仕分けセンサ(1)23aと仕分けセンサ(2)23bの両方が前記フラグ24で遮られていなければ、振分け枠8aは左右の仕分け位置に移動したことが検知される。
【0029】
前記仕分け手段8の振分け枠8aの仕分け位置には、該振分け枠8aの揺動で初期位置から仕分け位置に移動された空容器aを減容化する減容手段10,10’が配置されている。
減容手段10,10’は、図1に示すように、仕分け手段8で仕分けられた空容器aを減容化するもので、2個の歯付きドラム10a,10bと、空容器を前記歯付きドラム10a,10bに押し込む回転羽根10cと前記振分け枠8aで振り分けられた空容器aを前記歯付きドラム10a,10bに案内するホッパー10dで構成されている。そして、左右の減容手段10,10’は1個のモータ(図示省略)で駆動するように構成されている。
前記前記ホッパー10dは金属材又は樹脂材によって樋状に形成され、そのホッパー10dが前記後部搬送手段4を挟む左右両側位置に平行、且つ長さ方向の後端側(ケース1の投入口と対向する端部)を下向きに傾斜させて配置され、そのホッパー10dの案内方向先端部に回転羽根10cが配置されている。それにより、振分け枠8aで仕分け位置に振り分けられた空容器aはホッパー10dを通り回転羽根10cで歯付きドラム10a,10b間に押し込まれ、小片状に破砕される。尚、この減容手段10,10’は、図示の形態に限定されず、例えば、2本のローラの間に空容器aを通して扁平状に潰すようなもの等、適宜選択し得るものである。
【0030】
前記減容手段10,10’で小片状に破砕減容化された空容器は、その減容手段10,10’の下方に配置されている回収箱(図示省略)に収容される。回収箱は、ケース1の側面或いは前面に設けた開閉扉を開けて出し入れされる。
【0031】
また、前記ケース1の前面部には適正に回収された空容器に対して付与されるデポジット又は特典を表示したチケットを発行するプリンタ11が設けられている。
【0032】
上記した空容器回収装置Aの各構成部材は図7の電気ブロック図に示すように、各ブロックを制御するCPU25(制御手段)にバス26を介してROM27、RAM28、表示部29、キー操作部30、プリンタ11、ロードセル13、計量部(第一の容器検知手段)9、通信部31が接続され、インターフェース32には容器検出用カメラ(第二の容器検知手段)16、バーコード用カメラ(種別検知手段)7、光源(LED)17、仕分けセンサ(1)23a、仕分けセンサ(2)23b、前部搬送手段駆動用モータ3d、転動支持手段駆動用モータ、上下移動手段駆動用モータ6a、後部搬送手段駆動用モータ4d、仕分け手段駆動用モータ22、減容手段駆動用モータが接続されている。
上記ROM27には、CPU25が実行する各種プログラムが記憶されている。
上記RAM28は、CPU25が実行するためのデータなどを一時記憶するもので、空容器の材質(アルミ缶、スチール缶、PETボトル等)、飲料メーカー、商品の種類などの商品ファイルを記憶している。
上記キー操作部30は、各種情報等を入力するためのタッチキー、或いはキー入力のためのテンキー等を備え、表示部29は液晶表示器等で構成され、前記キー操作部30を操作して入力された情報、処理内容等が表示されるように構成されている。
プリンタ11は、本装置に投入された空容器aのうち、デポジット対象の空容器を持ち込んだ提供者に容器回収のチケットを発行するものである。提供者はこのチケットを所定のお店等に持っていくことで、所定の対価の金額、或いは商品と交換することができる。また、回収した空容器aの材質(アルミ缶、スチール缶、PETボトル等)、飲料メーカー、商品種類、数量等のデータは、全てケース内のデータ処理装置(図示省略)に記憶し、その集計データは随時取り出せるようになっている。
【0033】
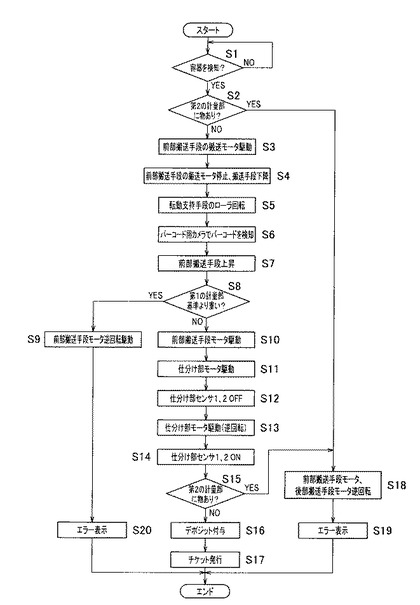
次に、上記した空容器回収装置の動作の概略を図8のフローチャートに基づいて説明する。尚、以下の説明は電源スイッチがONされ、各部がリセットされた状態で、空容器のPETボトルを色(有色/無色)で仕分ける例について説明する。
(S1)…PETボトル(空容器)aが投入口から投入されたか否かが容器検出用カメラ(第二の容器検知手段)16で検知判断される。PETボトル(空容器)aの投入の有無は画像の変化によって判断される。PETボトル(空容器)aの投入が検知された場合(YES)は(S2)に進み、それ以外の場合(NO)は前記検知動作を一定間隔で繰り返す。
(S2)…後部搬送手段4上にPETボトル(空容器)aが存在するか否かが計量器(容器検出手段)9で判断される。PETボトル(空容器)aが存在する場合(YES)は(S18)へ進み、PETボトル(空容器)aが存在しない場合(NO)は(S3)へ進む。PETボトル(空容器)aが存在する場合とは、今回の空容器投入より前に投入された空容器が前部搬送手段3で後部搬送手段4まで搬送され、仕分け手段8の仕分け動作で仕分けられたにもかかわらず、不正行為により該仕分け手段の初期位置に空容器aが存在する場合が挙げられる。また、前部搬送手段3に載承支持されたPETボトル(空容器)aの重量がロードセル(第1の計量部)13で計量される。
【0034】
(S3)…前部搬送手段3の駆動用モータ3dが駆動される。前記容器検出用カメラ16で撮像される画像データによるPETボトル(空容器)aの位置を示す座標データに基づき、投入されたPETボトル(空容器)aの先端(投入方向前側)が、転動支持手段5の略先端位置に位置したと判断されるまで、前記前部搬送手段3の駆動用モータ3dが駆動される。
(S4)…PETボトル(空容器)aの先端(投入方向前側)が、転動支持手段5の略先端位置に位置したと前記容器検出用カメラ16による撮像された画像データにより判断された場合、前記前部搬送手段3の駆動が停止され、且つ該前部搬送手段3は上下移動手段6の作動で下方に下げられる。それにより、前部搬送手段3で支持されていたPETボトル(空容器)aは転動支持手段5の2本のローラ5a,5bに移載支持される(図3、図4参照)。
(S5)…転動支持手段5の2本のローラ5a,5bが駆動回転し、PETボトル(空容器)aを回転させる。
(S6)…バーコード用カメラで、PETボトル(空容器)aの周面に貼付されたバーコードが検知され、バーコードの情報が読み出される。例えば、PETボトルの色情報、商品の名称、PETボトルの空の重量値に対する基準重量値等、該ボトルにより返却すべきデポジット額等が読み出される。前記「基準重量値」は、誤差等を考慮し、空のボトルの重量値より若干重い重量値が設定される。そして、この「基準重量値」はPETボトルに飲み残しがあるか否かの判断基準に使用される。
(S7)…前記バーコード用カメラによるバーコードの検知が完了した後、転動支持手段5の駆動を停止し、上下移動手段6を作動して前部搬送手段3を元の位置に上昇させ、PETボトル(空容器)aを転動支持手段5から前部搬送手段3に移載し、PETボトル(空容器)aを搬送可能な状態にする。
【0035】
(S8)…前部搬送手段3に載承した状態でロードセル(第1の計量部)13により計量した重量値が、(S6)で読み出された空のボトルの基準重量値より重いか否かが判断される。ロードセル(第1の計量部)13の出力値が基準重量値より重い場合(YES)、つまり、投入されたPETボトル(空容器)aの重量が基準重量値より重い場合は、該PETボトルに飲み残しがあると判断され、(S9)へ進む。ロードセル(第1の計量部)13の出力値が基準重量値より軽い場合(NO)は(S10)へ進む。
(S9)…前部搬送手段3の駆動用モータ3dを逆回転駆動し、載承保持したPETボトル(空容器)aを投入口に向けて搬送する。
(S10)…前部搬送手段3の駆動用モータ3d及び後部搬送手段4の駆動用モータ4dを正回転駆動する。そして、前記容器検出用カメラ16からの画像データと、容器の位置を示す座標データに基づき、PETボトル(空容器)aの後端部(搬送方向後端側)が前記画像データから消えた後、所定の時間が経過するまで、前記前部搬送手段3及び後部搬送手段4を駆動する。つまり、前記前部搬送手段3及び後部搬送手段4は、連続し隣接して配置されているので、前部搬送手段3での画像データからPETボトル(空容器)aが消えて、ごく僅かな所定時間が経過すると確実にPETボトル(空容器)aは、後部搬送手段4へ乗り移っていることになる。それにより、PETボトル(空容器)aは後部搬送手段4上の所定位置、即ち、初期位置に搬送支持される。
【0036】
(S11)…PETボトル(空容器)aが後部搬送手段4上に位置されると、(S6)で検出された情報、例えばPETボトル(空容器)の色情報に基づき、仕分け手段8の振分け枠8aを揺動機構8bによって初期位置から左右何れか一方の仕分け位置方向に揺動し、後部搬送手段4上のPETボトル(空容器)aを仕分け位置(送り位置)に振り分ける。つまり、前記のように、PETボトル(空容器)aの後端部(搬送方向後端側)が前記画像データから消えた後、所定の時間が経過すると、確実にPETボトル(空容器)aは、後部搬送手段4上に位置しているので、後部搬送手段4の駆動が停止した後、ごく僅かな所定の時間経過後に仕分け手段の仕分け手段駆動用モータ22を駆動することで、PETボトル(空容器)aを仕分ける。
そして、この場合、前記のように、PETボトル(空容器)aの後端部(搬送方向後端側)が前記画像データから消えて所定時間経過するまで、前記前部搬送手段3及び後部搬送手段4が駆動されるので、PETボトル(空容器)長さにより、後部搬送手段4上における該PETボトル(空容器)の搬送方向の先頭位置は異なるが、振分け枠8aは後部搬送手段4上の全ての領域を覆うように設けられているので、PETボトル(空容器)の搬送方向の先頭がどの位置であっても、確実にPETボトル(空容器)aを振り分けることができる。
そして、例えば、透明(無色)のPETボトルは後部搬送手段4の右側、有色のPETボトル(空容器)aは後部搬送手段4の左側に仕分ける。そして、前記振分け枠8aの揺動は、仕分けセンサ(1)23aと仕分けセンサ(2)23bの両方がフラグ24で遮られなくなる(仕分けセンサ(1)23a、仕分けセンサ(2)23b:OFF)まで駆動される(図6(a)、(b)参照)。なお、前記例では、後部搬送手段4の駆動が停止した後、ごく僅かな所定の時間経過後に、PETボトル(空容器)aが後部搬送手段4上に位置すると推定して、仕分け手段の仕分け手段駆動用モータ22を駆動させる例を示したが、これに限らず、計量器(第一の容器検知手段)9以外に、後部搬送手段4上にPETボトル(空容器)aが位置することを検知する手段、例えば光学センサや、カメラ等を設け、これらから出力される信号により、後部搬送手段4上にPETボトル(空容器)aが位置することを確認してから、仕分け手段の仕分け手段駆動用モータ22を駆動させるようにしてもよい。
【0037】
(S12)…前記仕分けセンサ(1)23aと仕分けセンサ(2)23bの両方がフラグ24で遮られなくなる(センサ:OFF)を検知する。これにより、仕分け手段8の振分け枠8aが初期位置から仕分け位置に移動したことが確認される。
(S13)…仕分け手段8の振分け枠8aを、前記揺動機構8bの逆方向駆動によって仕分け位置から初期位置に戻す。前記振分け枠8aの揺動は、前記仕分けセンサ(1)23aと仕分けセンサ(2)23bの両方がフラグ24で遮られるまで駆動する。
(S14)…前記仕分けセンサ(1)23aと仕分けセンサ(2)23bの両方がフラグ24で遮られる(センサ:ON)を検知する。これにより、仕分け手段8の振分け枠8aが仕分け位置から初期位置に移動したことが確認される。
【0038】
(S15)…後部搬送手段4上にPETボトル(空容器)aが存在するか否かが計量器(第一の容器検知手段)(第2の計量部)9で判断される。PETボトル(空容器)aが存在する場合(YES)は(S18)へ進み、PETボトル(空容器)aが存在しない場合(NO)は(S16)に進む。この計量器(第一の容器検知手段)9によるPETボトル(空容器)aの有無の検出は、仕分け手段8の動作(S11〜S14)後の検出であるから、通常は前記(S11)から(S14)の過程でPETボトル(空容器)aは所定の方向に仕分けられ、(S14)で振分け枠8aが初期位置に戻った時、PETボトル(空容)aは既に仕分けられた後なので、前記計量器(第一の容器検知手段)9から出力される重量値が、後部搬送手段4上にPETボトル(空容器)aが載っている重量値を出力することはない。しかし、例えば、PETボトル(空容器)aに紐等を結び、その紐を手で持ち、前記PETボトル(空容器)aを投入口から投入し、(S14)で振分け枠8aが仕分け位置から初期位置に戻る瞬間に該PETボトル(空容器)に結んだ紐を引き戻すことで、仕分け位置に振り分けられたPETボトル(空容器)aは後部搬送手段4上(初期位置)に引き戻される。この操作を繰り返すことで、1個のPETボトル(空容器)aで、何回もデポジットや特典を取得する不正行為が可能となる。そこで、仕分け手段8の振分け枠8aが左右何れかの仕分け位置に回動して空容器を仕分けた後、該振分け枠8aが仕分け位置から初期位置の戻った時の計量器(第一の容器検知手段)9の出力を判断することで、正常に仕分けされたか否かを判断することができる。即ち、前記のように不正行為により投入されたPETボトル(空容器)aが後部搬送手段4上(初期位置)に引き戻された場合、前記計量器(第一の容器検知手段)9の出力(重量値)が、重量値「大」(ボトル有り)→重量値「小」(ボトル無し)→重量値「大」(ボトル有り)と変化し、不正の疑いがあると推測できる。尚、正常に仕分けられた場合、前記計量器(第一の容器検知手段)9の出力(重量値)は、重量値「大」(ボトル有り)→重量値「小」(ボトル無し)→重量値「小」(ボトル無し)と変化する。
このように計量器(第一の容器検知手段)9で空容器があるか否かを判断する場合、通常、例えばロードセル式の計量器で物の重さを判断する場合、物を計量部に載せた場合、出力される重量値が安定するまでには一定の時間がかかる。しかし、本発明の計量器(第一の容器検知手段)では、空容器の正確な重量を計量する必要はないので、空容器が仕分けられ、計量器から出力される重量値がゼロになり、その後に、不正により空容器が戻された場合は、空容器が計量器に載ることで、計量器から一定の重量でないにしろ重量が出力されるようになる、このような状態を把握することで、仕分けられた後に、空容器が検知されたと判断することが可能になる。
【0039】
(S16)…(S6)で検知されたPETボトル(空容器)aのバーコードから読み出されたデポジット額を付与し、その金額と日時データ、及び(S6)で読み出したバーコード情報、商品名等をRAM30に記憶する。
(S17)…(S16)で付与されたデポジット額がチケットに印字されて発行される。そして、前記チケットを取得したボトル提供者は、該チケットを店員のいるレジに持っていき、差し出すことで、該デポジット額の金額を受け取ることができる。
(S18)…(S15)で仕分け手段の振分け枠8aが仕分け位置から初期位置に戻った時の計量器(第一の容器検知手段)9の出力(重量値)により、後部搬送手段4上にPETボトル(空容器)aが載っていると判断され、不正の疑いがあるので、後部搬送手段4及び前部搬送手段3の駆動用モータを逆回転駆動して、後部搬送手段4上のPETボトル(空容器)aを投入口に戻し、装置から排出する。
(S19)…そして、例えば、表示部に「店員をお呼び下さい。」等のエラーメッセージをエラー音と共に表示する。また、「デポジット額は生成されなかった。」旨の表示をしてもよい。
(S20)…(S8)で投入したPETボトル(空容器)aの重量が基準重量値より重いと判断され、(S9)で前部搬送手段3を逆回転駆動して当該PETボトル(空容器)aを投入口側に戻したので、例えば、表示部に「中身を捨ててから再度、投入して下さい。」等のエラーメッセージを表示する。
【0040】
上記フローチャートの(S16)で記憶されたデポジット額を付与した履歴情報は、例えば、店舗の営業終了時に上位の管理装置へ送信され管理するようにしてもよい。また、前記履歴情報は装置のRAM30内に記憶するようにしたが、前記上位の管理装置の記憶部に直接記憶し、管理するようにしてもよい。
また、(S14)で、仕分けセンサ(1)、(2)がONになった際、つまり、仕分け手段8の仕分け枠8aが初期位置に位置した時に、計量器(第一の容器検知手段)9に物があるか否かを判断するようにしたが、これに限らず、(S12)で仕分けセンサ(1)、(2)がOFFになり、仕分けされた後、該仕分けセンサ(1)、(2)がONになるまでの間(仕分け手段8が初期位置に戻るまでの間)に計量器(第一の容器検知手段)9に空容器があると判断されたかを判断し、空容器があると判断した場合にはデポジット、特典を付与しないよう制御してもよい。この場合、空容器が仕分けられれば、通常であれば後段へ移行するので、再び計量器(第一の容器検知手段)9により空容器があると検出されることはないが、空容器に紐等をつけておき、該紐が引かれて該容器が引き戻される場合には、仕分け手段8が初期位置に戻る過程で一緒に空容器が引き戻されて不正が行われる可能性がある。このような場合でも、一旦、仕分け手段8による仕分けされた後に空容器が検出された場合は、不正の疑いがあるのでデポジットや特典を付与しないようにする。つまり、仕分け手段8により仕分けされた後(仕分けセンサ(1)、(2)がONになった後)、仕分け手段8が初期位置に移動する過程、更に、初期位置に位置したときに、例えば計量器からなる第一の容器検知手段9により空容器が検出されない場合に、デポジットや特典を付与するようにする。
【0041】
また、仕分け手段8の駆動モータ22が(S11)で駆動され、(S12)で仕分けセンサ(1)、(2)がOFFになる前(仕分け位置に位置する前)であっても、通常は空容器が仕分けられることで計量器(第一の容器検知手段)9から出力される計量値は小さくなるが、仕分けセンサ(1)、(2)がOFFになる前に、計量器(第一の容器検知手段)9から出力される計量値が増える場合には、前記と同様に空容器が引き戻されることで、該引き戻された空容器が計量器(第一の容器検知手段)9上に位置し、一旦減った計量値が増えていると推測できるので、このような場合においても、デポジットや特典を付与しないよう制御してもよい。
つまり、CPU25は仕分け手段8の駆動モータ22が駆動し仕分けが開始した後に、第一の容器検知手段である計量器9から空容器を検出した信号を受けたか否かを常に監視している。なお、一つの空容器が装置へ投入され、デポジットを付与する、あるいは、しないを判断し、デポジットを付与する場合には、(S17)で示したようにチケットを発行し、付与しない場合は、(S19)でエラー表示をするまで、次の空容器の投入口からの受け入れを許可しないので、仕分け手段8が駆動した後に、次の空容器のために計量器9の計量値が増えることはない。
【0042】
また、更に、(S11)から(S14)までの間に、容器検出用カメラ16(第二の容器検知手段)が空容器を検出し、しかも、空容器が装置内から投入口へ移動する方向であった場合には、デポジット、特典を付与しないようにしてもよい。つまり、(S11)で仕分け手段の駆動モータ22が駆動した直後に、空容器に紐等が付けられており、その紐を投入口の外から引っ張ることで空容器を投入口外へ引き戻そうとした場合、仕分け手段8が初期位置から仕分け位置へ移動し、初期位置へ戻る間に、容器検出用カメラ16(第二の容器検出手段)が空容器を検出し、しかも、空容器が装置内から投入口へ移動する方向と判断された場合には、不正により空容器が引き戻されたと判断してデポジットや特典を付与しないよう制御する。
【0043】
前記の実施の形態とは異なり、前に投入した空容器のデポジット付与等の処理が完了する前に、次の空容器を投入可能なようにしてもよい。つまり、(S11)から(S14)までの間に、容器検出用カメラ16(第二の容器検知手段)が空容器を検出した場合であっても、投入口から装置内方向へ移動する空容器が検知された場合には、次の空容器が検知されたと判断する。すなわち、仕分け手段8により後段へ空容器を送っている間に、次の空容器が投入され、前部搬送手段3にて空容器の種別等が検知されるようになるので、前の空容器に対してデポジット付与等の処理が完了する前に、次の空容器を投入することができるので、単位時間当たりの処理量を増やすことができる。そして、前部搬送手段3での容器種別の検知が完了しても、仕分け手段8での仕分けが完了していない場合には、前部搬送手段3上に位置する空容器は後部搬送手段4へ移行しないようにする。これにより、前の空容器に対する仕分けが完了する前に計量器(第一の容器検知手段)9の計量値が増えることがないようにすることができる。
【0044】
上記実施の形態では、後部搬送手段4に設けた計量器(第一の容器検知手段)9から出力される仕分け手段8の動作前後の重量値の情報に基づいてデポジットを付与するか否かを判断したが、例えば、仕分け手段8の初期位置(後部搬送手段4)上に空容器を検知するセンサを設け、該センサの検知と、仕分け手段8の振分け枠8aが仕分け位置から初期位置に戻ったという情報(前記仕分けセンサ(1)23aと仕分けセンサ(2)23bのON/OFF情報)に基づき、デポジットを付与するか否かを判断するようにしてもよい。但し、この場合は不正行為により空容器が戻される場合を考慮し、前記後部搬送手段4上の初期位置全域を把握できるように、センサを多数設ける必要がある。
【0045】
また、仕分け手段8の初期位置(後部搬送手段4上)における容器の有無を検出する第一の容器検知手段9は、前記した計量器、或いはセンサに限らず、後部搬送手段4上を撮影するカメラとしてもよい。即ち、後部搬送手段4上にカメラを配置し、仕分け手段8の振分け枠8aが仕分け位置から初期位置に戻ったという情報(前記仕分けセンサ(1)23aと仕分けセンサ(2)23bのON/OFF情報)と、その時の後部搬送手段4上を撮像した画像データにより、該後部搬送手段4上の空容器の有無を検知して、デポジットを付与するかを判断するようにしてもよい。
【0046】
上記構成の空容器回収装置は、投入された空容器を仕分け手段の位置へ搬送する過程の前段で、空容器の種別を検知し、その種別検知の情報に基づいて後段に配置した仕分け手段の動作方向(仕分け方向)を決定し、且つ、該仕分け手段が仕分け位置から初期位置に戻った(移動した)時の、該初期位置における空容器の有無を検知してデポジット(或いは特典)の付与を決定するようにしたので、不正行為によるデポジットの取得を防止することができる。
また、前記デポジット付与を決定する仕分け手段の初期位置における空容器の有無検出(第一の容器検知手段)を、該初期位置(後部搬送手段)における重量を計量する計量器、或いはセンサ、カメラとしたことで、減容手段付近にセンサを配置し、該センサで空容器の通過の有無を検知して、デポジット付与を判断した従来構造と比べて、第一の容器検知手段のメンテナンスの煩わしさ、及びセンサの汚れによる誤検知等の問題を解消することができる。
【0047】
本発明に係る空容器回収装置は図示した実施の形態に限定されず、本発明の要旨を変更しない範囲内で適宜変更可能である。
(1)実施の形態では、PETボトル(空容器)の色(有色/無色(透明))により仕分ける方向を変える例を示したが、これに限らず、例えば、PETボトルと缶(アルミ缶、スチール缶)、或いはアルミ缶とスチール缶に仕分けるようにしてもよい。この場合、転動支持手段に移載した空容器を回転させて該容器に貼付されたバーコードから容器の種別情報を読み出す、或いは、前部搬送手段の下部に金属検知器を設け、PETボトルか、その他の金属系の容器かを識別するようにしてもよい。
(2)実施の形態では、仕分け手段を門型の枠体で構成した例を示したが、これに限らず、例えば搬送手段の両側に、搬送される空容器を移載支持するローラ部材を配置し、そのローラ部材を左右何れかに傾けて仕分けるようにしてもよい。この場合、搬送手段が水平である位置を初期位置とし、左右の何れかに傾けられた位置を送り位置とし、搬送手段が初期位置と送り位置との間を移動するようになる。また、装置内に投入され仕分けのために待機している空容器の一方の側部に回転するローラ部材が、例えば上方から出現し、その回転するローラと空容器とが接触することで、該空容器が一方向へ弾き飛ばされることで、仕分けるようにしてもよい。この場合、仕分ける側と反対の空容器の側部に前記回転するローラ部材が出現するようになる。この場合は、空容器は回転するローラ部材と接触するだけでローラの回転方向へ弾き飛ばされるので、前記実施の形態のように初期位置、仕分け位置(送り位置)は有さないことになる。
(3)実施の形態では、空容器の投入をカメラが撮影した画像の変化で検知する例を示したが、これに限らず、例えば、投入口に光学センサを設け、該センサによる検知信号で空容器の投入を判断するようにしてもよい。
(4)実施の形態では、前部搬送手段から後部搬送手段へ乗り移ったかの判断を、前部搬送手段上方に配置したカメラの画像の変化で判断したが、これに限らず、例えば、前部搬送手段と後部搬送手段との間に光学センサを配置し、該センサの検知内容の変化(容器先端検知、検知継続、検知なし)で判断するようにしてもよい。
(5)実施の形態では、空容器に付されたバーコードのバーコード情報を取得するためにバーコード用カメラ(種別検知手段)で該バーコードを撮像する例で示したが、バーコードの他に、例えば一定の国に販売したことを示す情報をコード化したものが、バーコードと共に付されており、そのコードの情報も、バーコード情報と共に取得するようにしてもよい。つまり、バーコード情報を取得するための専用のカメラでなく、他の情報も併せて取得するカメラであってもよい。
(6)実施の形態では、仕分け手段が送り手段に相当し、仕分けをして後段に位置する減容手段へ送る説明をしたが、仕分け(振分け)機能は有さず、例えば前記仕分け手段にて、必ず一方向のみに振るようにし、決まった方向へ容器を送る送り手段であってもよい。
(7)実施の形態では、減容手段の直前にセンサを設けない構成の例により説明をしたが、減容手段の直前にセンサを設けて、該センサにより検知されるとデポジットや特典を付与する場合であっても、該センサを検知した後に、第一の容器検知手段である計量器9で空容器が検知された場合には、付与するとカウントされたデポジットを、付与しないように制御してもよい。つまり、センサで空容器が検知されてから、一定時間を待ってその間に計量器(第一の容器検知手段)9にて容器が検出されるか否かにより、正式にデポジットを付与するか否かを決定するようにしてもよい。
【符号の説明】
【0048】
A…空容器回収装置 a…PETボトル(空容器)
2…投入口 3…前部搬送手段(搬送路)
4…後部搬送手段(搬送路) 5…転動支持手段
6…上下移動手段 7…バーコード用カメラ(種別検知手段)
8…仕分け手段(送り手段) 9…計量器(第一の容器検知手段)
10…減容手段 11…プリンタ
16…容器検出用カメラ(第二の容器検知手段)
25…CPU(制御手段)
【技術分野】
【0001】
本発明は、飲料水などが収容されていた缶やPETボトル等の空容器を回収する空容器回収装置に関し、特に、空容器の回収に対しデポジットや特典が付与される空容器回収装置に関する。
【背景技術】
【0002】
飲料水などが収容されていた缶やPETボトル等の空容器を回収する装置が存在する。そして、その空容器回収装置として、装置に投入された空容器を仕分けし、実際に空容器が減容された場合、データ上では空容器を受け入れたと判断してデポジット額を発生する装置がある。
【0003】
前記装置では、実際に空容器が減容されたことに基づきデポジット額を生成するので、通常、減容手段の近く(例えば、手前位置)に空容器の通過を検知するセンサを配置し、該センサの検知範囲を空容器が通過することで、前記センサの後段直後に配置された減容手段で減容されたと判断している。
【0004】
しかし、前記したように空容器がセンサの検知エリアを通過することでデポジット額を発生することを、装置を操作する人が経験的に知った場合、例えば、空容器に紐等を結び、その空容器を投入口より投入し、該容器がセンサで検知されたタイミング(センサで検知後減容手段に供給される前)で前記紐を引いて前記空容器を投入口側にひき戻し、再度同じ空容器を投入し同様の操作を繰り返すことで、同じ空容器で何回もデポジットを取得する不正行為の虞れがあった。
【0005】
この不正行為の問題に対して、空容器を装置内へ投入する投入口にシャッタを設け、一旦装置内に投入した空容器は投入口に引き戻せないようにすることも考えられるが、この場合、開閉式のシャッタが使用者の目の前に位置することになり、誤って指や手等が挟まることが懸念されるため、安全面から投入口にシャッタ等を設けないようにすることが求められていた。
尚、前記デポジットと同様に、装置に投入された空容器に応じてポイントや特典を付与する回収装置においても、前記デポジットと同様であった。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−182805号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は上記従来の技術が有する問題点に鑑みてなされたもので、不正行為を防止し、更に、安全にデポジット或いは特典を付与することができる空容器回収装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために本発明の空容器回収装置は、投入口から投入され回収される空容器に対しデポジット或いは特典を付与する空容器回収装置において、前記投入された空容器を後段に送る送り手段と、前記送り手段が配置されている領域における空容器の有無を検知する第一の容器検知手段と、前記送り手段の動作後、前記第一の容器検知手段により空容器が検知されたとき前記デポジット或いは特典の付与をせず、前記送り手段の動作後、前記第一の容器検知手段により空容器が検知されないとき前記デポジット或いは特典の付与をする制御手段と、を備えることを特徴とする。
【0009】
前記送り手段の動作後とは、該送り手段の作動開始後の何れのタイミングでもよい趣旨である。具体的には、例えば、送り手段が初期位置から所定位置まで移動する送り手段で、空容器を該送り方向へ送る送り手段の場合、該送り手段が前記初期位置から所定位置まで移動する間、あるいは、所定位置から初期位置に戻る間、あるいは初期位置に戻ったときの何れのタイミングでもよい。
【0010】
上記手段によれば、投入された空容器が送り手段の移動(作動)で送られた後に、第一の容器検知手段が「容器有り」を検出したときは、送り手段により空容器が移動されたにも拘らず、該空容器が不正行為、例えば投入した空容器に紐等を連結して該容器を引き戻した疑いがあるので、デポジット或いは特典の付与をしない。
【0011】
また、例えば、第一の容器検知手段が、送り手段の付近を撮像するカメラであった場合、空容器が送り手段付近から消えていく画像は、送り手段の作動時における通常の画像であるが、一旦、送り手段位置付近の画像から消えた空容器が、再び画像に現れた場合には、不正により引き戻されたと判断することができる。
また、前記第一の容器検知手段が、前記送り手段における計量器の場合には、一旦、空容器が送り手段の作動で送られて減った計量値が増えている場合には、不正により空容器が引き戻されたと判断することができる。
【0012】
一方、送り手段により空容器が送られた後に、前記第一の容器検知手段により空容器が検知されないときは、空容器が間違いなく仕分け回収できたと判断され、制御手段がデポジット或いは特典を付与する。
以上のように、送り手段の送りが開始後、送り手段が配置されている領域で空容器が検知されたか否かを判断し、いずれのタイミングでも空容器が検知されない場合は、空容器を正しく回収できたと判断され、付与手段がデポジット或いは特典を付与する。逆に送り手段の動作後、いずれかの過程、タイミングで空容器が検知された場合には、デポジット或いは特典を付与しないよう制御する。
また、従来は、減容手段の近傍に設けられるセンサで空容器を検知しているので、該センサが空容器内の飲み残し等により汚れ、頻繁なメンテナンスが必要であるが、前記のように送り手段により容器を送った後、送り手段が送り位置へ移動する過程、また、初期位置へ戻る過程、更に、初期位置における空容器の有無を判断するので、前記送り手段を減容手段の前段に配置し、減容手段とは離れた位置に配置できるので、空容器が潰された際に飛び散る液体等があったとしても影響を与えることがなく頻繁なメンテナンスは必要ない。
【0013】
また、本装置は前記投入された空容器の種別を検知する種別検知手段を備え、その種別検知手段の種別情報に基づき種別毎に仕分けて後段へ送るように作動するようにしてもよい。つまり、送り手段が仕分けをして後段へ空容器等を送る仕分け機能を兼ねるようにしてもよい。
前記種別検知手段は、例えば、PETボトルと缶、或いはアルミ缶とスチール缶等を判別する。その検知手段としては、容器に貼付されているバーコードから容器の種別情報を読み取り判別する方法、容器を撮影し画像より種別を判別する方法、或いは金属検知器を設けて、金属系の容器と、その他の容器とを判別する方法等が挙げられ、回収対象の容器に合わせて最適な方法を選択する。また、前記読み取ったバーコードから投入された空容器が、当該店舗にて回収対象の容器であるか否かを同時に判断するようにしてもよい。つまり、当該店舗で販売している商品か否かを判断し、当該店舗で扱っていないボトルは受け付けないようにしてもよい。また、該バーコードとは別のマークが付されたシール等を検知するか否かにより、回収すべきか否かを判断するようにしてもよい。
【0014】
前記第一の容器検知手段は、前記仕分け手段(送り手段)が配置されている領域における空容器の有無を検知できるものであればよく、例えば、光学センサ、カメラ等が挙げられるが、更に、重量を計量する計量手段で構成してもよい。計量手段で第一の容器検知手段を構成した場合は、センサ等と異なり、検知手段が汚れて誤検知するのを防止できる。
また、光学センサ等で仕分け手段(送り手段)の初期位置における空容器の有無を検知する場合、該仕分け手段(送り手段)は減容手段より上流で離れている位置に配置されているので、空容器が減容された(潰された)際に飛び散る液体等が該センサに付着せず、従って該センサが汚れることがなく、頻繁なメンテナンスは必要なくなる。
また、計量手段(計量器)で空容器があるか否かを判断する場合、例えばロードセル式の計量器で物の重さを判断する場合、物を計量部に載せた場合、出力される重量値が安定するまでには一定の時間がかかる。しかし、本発明の第一の容器検知手段では、空容器の正確な重量を計量する必要はないので、空容器が仕分けられ、計量器から出力される重量値がゼロになり、その後に、不正により空容器が戻された場合は、空容器が計量器に載ることで、計量器から一定の重量でないにしろ重量が出力されるようになる、このような状態を把握することで、仕分けられた後に、空容器が検知されたと判断することが可能になる。
【0015】
また、前記計量手段の略直上に前記仕分け手段(送り手段)が位置している。これにより、空容器が不正行為等により戻されたときには、必ず仕分け手段の下方に位置する計量手段により、その空容器の重量が検知されるので確実に空容器があることを検知することができるので、不正行為等によりデポジットや特典を付与してしまうことを確実に防ぐことができる。
【0016】
また、前記投入口から投入された空容器を装置内へ案内する搬送路と、該搬送路を通る空容器を検知する第二の容器検知手段と、を有し、前記送り手段が前記搬送路の後段に設けられ、前記送り手段が動作している間に、前記第二の容器検知手段により空容器が検知されたとき、前記デポジット或いは特典の付与をしないように制御してもよい。
つまり、送り手段(仕分け手段)により、空容器が送られている(仕分けされている)間に搬送路を通る空容器が検出された場合には、空容器が引き戻されたと判断し、デポジット或いは特典の付与をしないことで不正によるデポジット、あるいは特典の付与を防止することができる。
また、前記第二の容器検知手段は、容器が移動する向きを更に検知し、前記空容器が装置内から前記投入口へ移動すると判断されたとき、前記デポジット或いは特典の付与をしないよう制御してもよい。つまり、前記のように、送り手段(仕分け手段)により空容器が送くられている時に搬送路を通る空容器を検知した場合には、不正とみなすこともできるが、搬送される空容器の向きを検知して、装置内から投入口へ移動する空容器が検知された場合には、空容器が引き戻されたと判断し、デポジットや特典を付与しないようにすることができる。換言すれば、搬送路を通過する空容器が検知されても、空容器の順方向への移動、つまり、投入口から装置内への移動であれば、次の空容器が投入されたと判断することで、前のデポジットや特典付与の処理の完了を待たずに、次の空容器の投入を許容することができるので、単位時間当たりの空容器の処理量を多くすることができる。
【発明の効果】
【0017】
本発明の空容器回収装置は、送り手段(仕分け手段)の動作後における第一の容器検知手段の出力信号(検知情報)に基づいて、デポジット或いは特典の付与を決定するので、不正行為によるデポジット或いは特典の取得を防止し、安全な空容器回収装置を提供できる。
【図面の簡単な説明】
【0018】
【図1】本発明に係る空容器回収装置の実施の形態の一例を示す概略図で、(a)は側面図、(b)は平面図。
【図2】前部搬送手段及び転動支持手段部分の拡大図で、(a)は側面図、(b)は同平面図
【図3】前部搬送手段を降下した状態の同側面図。
【図4】(a)は図2の(a)−(a)線に沿える断面図、(b)は図3の(b)−(b)線に沿える断面図。
【図5】後部搬送手段上に配置した仕分け手段を示し、(a)は側面図、(b)は同背面図。
【図6】仕分け手段の作動状態を示す背面図で、(a)は振分け枠が後部搬送手段の右側の仕分け位置に移動した状態、(b)は振分け枠が後部搬送手段の左側の仕分け位置に移動した状態。
【図7】同装置の動作を制御する構成部材の電気ブロック図。
【図8】回収処理の流れを示すフローチャート図。
【発明を実施するための形態】
【0019】
以下、本発明に係る空容器回収装置の実施の形態の一例を図面に基づいて説明する。
図1は空容器回収装置Aの概略を示し、1は容器回収装置Aのケース、2は前記ケース1の前面に開設された空容器aの投入口で、該ケース1内には前記投入口2から投入された空容器aを装置内に搬入する前部搬送手段(搬送路)3,後部搬送手段4、前部搬送手段3で搬入された空容器をバーコード読み取り位置に支持する転動支持手段5、前部搬送手段3から前記転動支持手段5に空容器aを載せ替えるために前記前部搬送手段3を上下揺動させる上下移動手段6、前記転動支持手段で支持される空容器aに表示(貼付)されたバーコード(種別)を読み取るバーコード用カメラ(種別検知手段)7、前記バーコードカメラ(種別検知手段)7で種別検知が終わり後部搬送手段4上に搬送された空容器aを、前記バーコードカメラ(種別検知手段)7の検知情報に基づき仕分ける仕分け手段(送り手段)8、前記仕分け手段(送り手段)8の初期位置における空容器の有無を検知する計量器(第一の容器検知手段)9、前記仕分け手段(送り手段)8で仕分けられた空容器を減容処理する減容手段10,10’、回収した空容器に対してデポジット或いは特典のチケットを発行するプリンタ11等が装備されている。
【0020】
ケース1の投入口2から投入された空容器(PETボトル、アルミ缶、スチール缶等)aを装置内に搬入する搬送装置は、空容器aをバーコード用カメラ(種別検知手段)7による読み取り可能位置まで搬送する前部搬送手段3と、種別検知が終わった空容器aを種別検知の検知情報に基づいて作動する仕分け手段(送り手段)8の仕分け領域に搬送する後部搬送手段4とで構成されている。
前部搬送手段3は、断面円形の無端状ベルト3aを、駆動プーリ3bと従動プーリ3cとに亘り所定間隔(筒状の空容器を二点で支持する間隔)を置いて2本平行に巻回したベルトコンベアで構成され、前記駆動プーリ3bはモータ3dの回転が動力伝達手段を介し伝達され、駆動回転されるように構成されている。
そして、搬送面を構成する無端状ベルト3aの表面は、後述する転動支持手段5を構成するローラの表面(アルミ材)における摩擦抵抗より大きい材質、例えば、ウレタン樹脂、或いは塩化ビニル樹脂等で構成されている。
また、その前部搬送手段3は、ケース1内に架設した基台12上にロードセル13を介して支持した取付台14上に上下揺動可能に載置されている。
【0021】
前部搬送手段3の支持は、搬送始端側である駆動プーリ3bの軸端を取付台14上に起立した起立枠15で回動可能に支持し、前部搬送手段3の機長方向の略中央位置が、取付台14上に設置した上下移動手段6で支持されている。
上下移動手段6は、モータ6aとそのモータの出力軸に取り付けた偏心回転板6bと偏心回転板6bと前記前部搬送手段3を連結するアーム6cとで構成され、モータ6aが作動することでアーム6cが揺動し、それにより前部搬送手段3が搬送始端(駆動プーリ3b)側を支点として搬送終端(従動プーリ3c)側が上下される。尚、この上下移動手段6は、図示の構成に限定されず、搬送始端側を支点として反対側を上下し得る方法であれば何れの方式でもよい。
【0022】
また、前記前部搬送手段3の始端側上部には空容器aの投入を検出する容器検出用カメラ(第二の容器検知手段)16が設置されている。容器検出用カメラ16による撮像で空容器aの投入の有無及び投入された空容器aの搬送状態(位置)を判断する。前記判断は、撮像した画像の領域をマトリックス状に区分けし、位置を識別する。具体的には、空容器aの長さ方向、高さ方向の各領域の画像を一定のしきい値により二値化して各領域の像の有無により判断する。そして、この容器検出用カメラ16の画像データの判断に基づいて前記前部搬送手段3の駆動/停止が制御される。そして、容器検出用カメラ16は、搬送手段3上の領域全てを撮像することができ、前記のようにマトリックス状に区分けし、空容器の位置を検出することができるので、該マトリックス状のどの位置から空容器を検知したかを把握することができる。つまり、上流方向から像が生じたと判断した場合には空容器の移動方向が順方向、即ち、投入口から装置内へ空容器が移動したと判断することができる。逆に、下流方向から像が生じたと判断された場合には、空容器の移動方向が逆方向、即ち、装置内から投入口方向へ空容器が移動したと判断することができる。
また、前記容器検出用カメラ16による撮像を鮮明に行うために照明の光源(LED)17が配置されている。
【0023】
転動支持手段5は、前記前部搬送手段3を構成する無端状ベルト3aを挟んで左右両側に水平に配置した2本のローラ5a,5bと、その2本のローラ5a,5bを回転させるモータ(図示省略)と、そのモータの回転を前記2本のローラ5a,5bに伝達する動力伝達部材(図示省略)とで構成されている。尚、動力伝達部材は、前記2本のローラ5a,5bが同一方向に回転するように構成されている。
【0024】
また、この転動支持手段5のローラ5a,5bは、前記前部搬送手段3の機長の中程位置から終端側手前位置までの長さを有しており、投入される缶及びPETボトル等の空容器の全長を安定よく支持し得るようになっている。尚、転動支持手段5を構成する2本のローラ5a,5bは、前記前部搬送手段3による搬送時、2本のローラのうちの何れか1本が空容器と接触している。
そして、前記前部搬送手段3が上下移動手段6によって前方下向きに傾斜下降されると、それまで無端状ベルト3aと2本のローラ5a,5bの片方の二点で支持されていた空容器は、無端状ベルト3aによる支持がなくなることで2本のローラ5a,5bによる二点支持に切り替わり、ローラの回転によって転動されることになる。
【0025】
バーコード用カメラ(種別検知手段)7は、投入された空容器aの周面に表示されているバーコードを読み取るもので、前記転動支持手段5の上方位置に、転動支持手段5の方向に向けて設置されている。尚、このバーコード用カメラ(種別検知手段)7は、所定角度に固定してもよいが、首振り回動式、スライド式等として、読み取り可能範囲を拡大するようにしてもよい。また、バーコード用カメラ7の台数は、1台に限らず、複数台でもよいものである。
このバーコード用カメラ(種別検知手段)7によるバーコードの読み取りは、バーコード用カメラにて空容器aのバーコードが検知され、そのデータを、制御部のデータベースに格納されているデータと比較して処理される。例えば、PETボトルの場合であれば、PETボトルの色情報、PETボトルの商品の名称、PETボトルの空の重量値に対する基準重量値(空のボトルの重量よりも若干重い重量が設定され、飲み残しの有無の判断に利用される)、ボトルにより付与すべきデポジット額等が読み出される。尚、デポジットシステムに対応する装置においては、仮に投入された空容器aがデポジット対象でない空容器である場合は、容器の回収は行うが、デポジットの付与を行わないようにすることも可能である。
【0026】
前記バーコード用カメラ(種別検知手段)7による検知が完了すると、空容器aは前記転動支持手段5から再び前部搬送手段3に移載され、その前部搬送手段3の駆動で後部搬送手段4に供給され、該後部搬送手段4の駆動で空容器aは仕分け手段8の初期位置に搬送される。
後部搬送手段4は、前記前部搬送手段3と同様、断面円形の無端状ベルト4aを、駆動プーリ4bと従動プーリ4cとに亘り所定間隔(筒状の空容器を二点で支持する間隔)を置いて2本平行に巻回したベルトコンベアで構成され、前記駆動プーリ4bはモータ4dの回転が動力伝達手段を介し伝達され、駆動回転されるように構成されている。
そして、搬送面を構成する無端状ベルト4aは、空容器aを安定して搬送し得るように摩擦係数の大きい材質、例えば、ウレタン樹脂、或いは塩化ビニル樹脂等で構成されている。
また、後部搬送手段4は、前記仕分け手段(送り手段)8の初期位置における空容器の有無を検出する計量器(第一の容器検知手段)9を介して支持されている。即ち、後部搬送手段4は、ケース1内に架設した基台12上に、計量器(第一の容器検知手段)9を介して支持した取付台18上に載置されている。これにより、仕分け手段8の初期位置(後部搬送手段4が空容器を載承支持する位置)における該仕分け手段8の仕分け位置から初期位置へ移動した時の重量変化を検出でき、計量器9の計量値に変化(仕分け手段の動作前における計量値>仕分け手段の動作後の計量値)があれば、空容器は正しく仕分け回収されたと判断でき、逆に仕分け手段8の動作前後における計量器9の計量値に変化がなければ、空容器は正しく仕分け回収されず、不正行為が行われたものと判断される。
【0027】
前記仕分け手段(送り手段)8は、図5に示すように、金属板或いは樹脂板等によって前後面(後部搬送手段4で搬送される空容器の前後面と対応する面)及び下面(後部搬送手段4で搬送される空容器の下半部外周面と対応する面)が開放され、前記後部搬送手段4に載承支持される空容器aを挟むよう対向する一対の壁部を有する断面略門型の振分け枠8aと、その振分け枠8aを左右方向に揺動させる揺動機構8bとで構成され、前記後部搬送手段4の直上に位置し、後部搬送手段4の機長方向略全ての範囲を覆い左右方向に揺動可能に支持されている。
左右方向への揺動は、後部搬送手段3上に支持されている空容器aを、前記バーコード用カメラ(種別検知手段)7の検知情報に基づいて前記後部搬送手段4の左右両側に配置した減容手段10,10’に振り分けるもので、ケース1内に垂下固着した取付板19に前記振分け枠8aの長手方向の先端側上部中央が軸20で揺動可能に軸支されている。
【0028】
前記揺動機構8bは、カムなどの揺動手段21と、その揺動手段21を駆動するモータ22とで構成されている。そして、前記振分け枠8aは前記揺動機構8bによって前記後部搬送手段4上に略垂直状態で垂下する初期位置から、前記バーコード用カメラ(種別検知手段)7の検知情報に基づいて左方向又は右方向の仕分け位置に揺動される。
前記振分け枠8aの揺動位置の検出は、該振分け枠8aの初期位置を検出する仕分けセンサ(1)23a、仕分けセンサ(2)23bが固定フレームに取り付けられ、フラグ24が前記振分け枠8aの軸20に固着されている。これにより、仕分けセンサ(1)23a、仕分けセンサ(2)23bがフラグ24で遮られていれば振分け枠8aは初期位置に位置し、前記仕分けセンサ(1)23aと仕分けセンサ(2)23bの両方が前記フラグ24で遮られていなければ、振分け枠8aは左右の仕分け位置に移動したことが検知される。
【0029】
前記仕分け手段8の振分け枠8aの仕分け位置には、該振分け枠8aの揺動で初期位置から仕分け位置に移動された空容器aを減容化する減容手段10,10’が配置されている。
減容手段10,10’は、図1に示すように、仕分け手段8で仕分けられた空容器aを減容化するもので、2個の歯付きドラム10a,10bと、空容器を前記歯付きドラム10a,10bに押し込む回転羽根10cと前記振分け枠8aで振り分けられた空容器aを前記歯付きドラム10a,10bに案内するホッパー10dで構成されている。そして、左右の減容手段10,10’は1個のモータ(図示省略)で駆動するように構成されている。
前記前記ホッパー10dは金属材又は樹脂材によって樋状に形成され、そのホッパー10dが前記後部搬送手段4を挟む左右両側位置に平行、且つ長さ方向の後端側(ケース1の投入口と対向する端部)を下向きに傾斜させて配置され、そのホッパー10dの案内方向先端部に回転羽根10cが配置されている。それにより、振分け枠8aで仕分け位置に振り分けられた空容器aはホッパー10dを通り回転羽根10cで歯付きドラム10a,10b間に押し込まれ、小片状に破砕される。尚、この減容手段10,10’は、図示の形態に限定されず、例えば、2本のローラの間に空容器aを通して扁平状に潰すようなもの等、適宜選択し得るものである。
【0030】
前記減容手段10,10’で小片状に破砕減容化された空容器は、その減容手段10,10’の下方に配置されている回収箱(図示省略)に収容される。回収箱は、ケース1の側面或いは前面に設けた開閉扉を開けて出し入れされる。
【0031】
また、前記ケース1の前面部には適正に回収された空容器に対して付与されるデポジット又は特典を表示したチケットを発行するプリンタ11が設けられている。
【0032】
上記した空容器回収装置Aの各構成部材は図7の電気ブロック図に示すように、各ブロックを制御するCPU25(制御手段)にバス26を介してROM27、RAM28、表示部29、キー操作部30、プリンタ11、ロードセル13、計量部(第一の容器検知手段)9、通信部31が接続され、インターフェース32には容器検出用カメラ(第二の容器検知手段)16、バーコード用カメラ(種別検知手段)7、光源(LED)17、仕分けセンサ(1)23a、仕分けセンサ(2)23b、前部搬送手段駆動用モータ3d、転動支持手段駆動用モータ、上下移動手段駆動用モータ6a、後部搬送手段駆動用モータ4d、仕分け手段駆動用モータ22、減容手段駆動用モータが接続されている。
上記ROM27には、CPU25が実行する各種プログラムが記憶されている。
上記RAM28は、CPU25が実行するためのデータなどを一時記憶するもので、空容器の材質(アルミ缶、スチール缶、PETボトル等)、飲料メーカー、商品の種類などの商品ファイルを記憶している。
上記キー操作部30は、各種情報等を入力するためのタッチキー、或いはキー入力のためのテンキー等を備え、表示部29は液晶表示器等で構成され、前記キー操作部30を操作して入力された情報、処理内容等が表示されるように構成されている。
プリンタ11は、本装置に投入された空容器aのうち、デポジット対象の空容器を持ち込んだ提供者に容器回収のチケットを発行するものである。提供者はこのチケットを所定のお店等に持っていくことで、所定の対価の金額、或いは商品と交換することができる。また、回収した空容器aの材質(アルミ缶、スチール缶、PETボトル等)、飲料メーカー、商品種類、数量等のデータは、全てケース内のデータ処理装置(図示省略)に記憶し、その集計データは随時取り出せるようになっている。
【0033】
次に、上記した空容器回収装置の動作の概略を図8のフローチャートに基づいて説明する。尚、以下の説明は電源スイッチがONされ、各部がリセットされた状態で、空容器のPETボトルを色(有色/無色)で仕分ける例について説明する。
(S1)…PETボトル(空容器)aが投入口から投入されたか否かが容器検出用カメラ(第二の容器検知手段)16で検知判断される。PETボトル(空容器)aの投入の有無は画像の変化によって判断される。PETボトル(空容器)aの投入が検知された場合(YES)は(S2)に進み、それ以外の場合(NO)は前記検知動作を一定間隔で繰り返す。
(S2)…後部搬送手段4上にPETボトル(空容器)aが存在するか否かが計量器(容器検出手段)9で判断される。PETボトル(空容器)aが存在する場合(YES)は(S18)へ進み、PETボトル(空容器)aが存在しない場合(NO)は(S3)へ進む。PETボトル(空容器)aが存在する場合とは、今回の空容器投入より前に投入された空容器が前部搬送手段3で後部搬送手段4まで搬送され、仕分け手段8の仕分け動作で仕分けられたにもかかわらず、不正行為により該仕分け手段の初期位置に空容器aが存在する場合が挙げられる。また、前部搬送手段3に載承支持されたPETボトル(空容器)aの重量がロードセル(第1の計量部)13で計量される。
【0034】
(S3)…前部搬送手段3の駆動用モータ3dが駆動される。前記容器検出用カメラ16で撮像される画像データによるPETボトル(空容器)aの位置を示す座標データに基づき、投入されたPETボトル(空容器)aの先端(投入方向前側)が、転動支持手段5の略先端位置に位置したと判断されるまで、前記前部搬送手段3の駆動用モータ3dが駆動される。
(S4)…PETボトル(空容器)aの先端(投入方向前側)が、転動支持手段5の略先端位置に位置したと前記容器検出用カメラ16による撮像された画像データにより判断された場合、前記前部搬送手段3の駆動が停止され、且つ該前部搬送手段3は上下移動手段6の作動で下方に下げられる。それにより、前部搬送手段3で支持されていたPETボトル(空容器)aは転動支持手段5の2本のローラ5a,5bに移載支持される(図3、図4参照)。
(S5)…転動支持手段5の2本のローラ5a,5bが駆動回転し、PETボトル(空容器)aを回転させる。
(S6)…バーコード用カメラで、PETボトル(空容器)aの周面に貼付されたバーコードが検知され、バーコードの情報が読み出される。例えば、PETボトルの色情報、商品の名称、PETボトルの空の重量値に対する基準重量値等、該ボトルにより返却すべきデポジット額等が読み出される。前記「基準重量値」は、誤差等を考慮し、空のボトルの重量値より若干重い重量値が設定される。そして、この「基準重量値」はPETボトルに飲み残しがあるか否かの判断基準に使用される。
(S7)…前記バーコード用カメラによるバーコードの検知が完了した後、転動支持手段5の駆動を停止し、上下移動手段6を作動して前部搬送手段3を元の位置に上昇させ、PETボトル(空容器)aを転動支持手段5から前部搬送手段3に移載し、PETボトル(空容器)aを搬送可能な状態にする。
【0035】
(S8)…前部搬送手段3に載承した状態でロードセル(第1の計量部)13により計量した重量値が、(S6)で読み出された空のボトルの基準重量値より重いか否かが判断される。ロードセル(第1の計量部)13の出力値が基準重量値より重い場合(YES)、つまり、投入されたPETボトル(空容器)aの重量が基準重量値より重い場合は、該PETボトルに飲み残しがあると判断され、(S9)へ進む。ロードセル(第1の計量部)13の出力値が基準重量値より軽い場合(NO)は(S10)へ進む。
(S9)…前部搬送手段3の駆動用モータ3dを逆回転駆動し、載承保持したPETボトル(空容器)aを投入口に向けて搬送する。
(S10)…前部搬送手段3の駆動用モータ3d及び後部搬送手段4の駆動用モータ4dを正回転駆動する。そして、前記容器検出用カメラ16からの画像データと、容器の位置を示す座標データに基づき、PETボトル(空容器)aの後端部(搬送方向後端側)が前記画像データから消えた後、所定の時間が経過するまで、前記前部搬送手段3及び後部搬送手段4を駆動する。つまり、前記前部搬送手段3及び後部搬送手段4は、連続し隣接して配置されているので、前部搬送手段3での画像データからPETボトル(空容器)aが消えて、ごく僅かな所定時間が経過すると確実にPETボトル(空容器)aは、後部搬送手段4へ乗り移っていることになる。それにより、PETボトル(空容器)aは後部搬送手段4上の所定位置、即ち、初期位置に搬送支持される。
【0036】
(S11)…PETボトル(空容器)aが後部搬送手段4上に位置されると、(S6)で検出された情報、例えばPETボトル(空容器)の色情報に基づき、仕分け手段8の振分け枠8aを揺動機構8bによって初期位置から左右何れか一方の仕分け位置方向に揺動し、後部搬送手段4上のPETボトル(空容器)aを仕分け位置(送り位置)に振り分ける。つまり、前記のように、PETボトル(空容器)aの後端部(搬送方向後端側)が前記画像データから消えた後、所定の時間が経過すると、確実にPETボトル(空容器)aは、後部搬送手段4上に位置しているので、後部搬送手段4の駆動が停止した後、ごく僅かな所定の時間経過後に仕分け手段の仕分け手段駆動用モータ22を駆動することで、PETボトル(空容器)aを仕分ける。
そして、この場合、前記のように、PETボトル(空容器)aの後端部(搬送方向後端側)が前記画像データから消えて所定時間経過するまで、前記前部搬送手段3及び後部搬送手段4が駆動されるので、PETボトル(空容器)長さにより、後部搬送手段4上における該PETボトル(空容器)の搬送方向の先頭位置は異なるが、振分け枠8aは後部搬送手段4上の全ての領域を覆うように設けられているので、PETボトル(空容器)の搬送方向の先頭がどの位置であっても、確実にPETボトル(空容器)aを振り分けることができる。
そして、例えば、透明(無色)のPETボトルは後部搬送手段4の右側、有色のPETボトル(空容器)aは後部搬送手段4の左側に仕分ける。そして、前記振分け枠8aの揺動は、仕分けセンサ(1)23aと仕分けセンサ(2)23bの両方がフラグ24で遮られなくなる(仕分けセンサ(1)23a、仕分けセンサ(2)23b:OFF)まで駆動される(図6(a)、(b)参照)。なお、前記例では、後部搬送手段4の駆動が停止した後、ごく僅かな所定の時間経過後に、PETボトル(空容器)aが後部搬送手段4上に位置すると推定して、仕分け手段の仕分け手段駆動用モータ22を駆動させる例を示したが、これに限らず、計量器(第一の容器検知手段)9以外に、後部搬送手段4上にPETボトル(空容器)aが位置することを検知する手段、例えば光学センサや、カメラ等を設け、これらから出力される信号により、後部搬送手段4上にPETボトル(空容器)aが位置することを確認してから、仕分け手段の仕分け手段駆動用モータ22を駆動させるようにしてもよい。
【0037】
(S12)…前記仕分けセンサ(1)23aと仕分けセンサ(2)23bの両方がフラグ24で遮られなくなる(センサ:OFF)を検知する。これにより、仕分け手段8の振分け枠8aが初期位置から仕分け位置に移動したことが確認される。
(S13)…仕分け手段8の振分け枠8aを、前記揺動機構8bの逆方向駆動によって仕分け位置から初期位置に戻す。前記振分け枠8aの揺動は、前記仕分けセンサ(1)23aと仕分けセンサ(2)23bの両方がフラグ24で遮られるまで駆動する。
(S14)…前記仕分けセンサ(1)23aと仕分けセンサ(2)23bの両方がフラグ24で遮られる(センサ:ON)を検知する。これにより、仕分け手段8の振分け枠8aが仕分け位置から初期位置に移動したことが確認される。
【0038】
(S15)…後部搬送手段4上にPETボトル(空容器)aが存在するか否かが計量器(第一の容器検知手段)(第2の計量部)9で判断される。PETボトル(空容器)aが存在する場合(YES)は(S18)へ進み、PETボトル(空容器)aが存在しない場合(NO)は(S16)に進む。この計量器(第一の容器検知手段)9によるPETボトル(空容器)aの有無の検出は、仕分け手段8の動作(S11〜S14)後の検出であるから、通常は前記(S11)から(S14)の過程でPETボトル(空容器)aは所定の方向に仕分けられ、(S14)で振分け枠8aが初期位置に戻った時、PETボトル(空容)aは既に仕分けられた後なので、前記計量器(第一の容器検知手段)9から出力される重量値が、後部搬送手段4上にPETボトル(空容器)aが載っている重量値を出力することはない。しかし、例えば、PETボトル(空容器)aに紐等を結び、その紐を手で持ち、前記PETボトル(空容器)aを投入口から投入し、(S14)で振分け枠8aが仕分け位置から初期位置に戻る瞬間に該PETボトル(空容器)に結んだ紐を引き戻すことで、仕分け位置に振り分けられたPETボトル(空容器)aは後部搬送手段4上(初期位置)に引き戻される。この操作を繰り返すことで、1個のPETボトル(空容器)aで、何回もデポジットや特典を取得する不正行為が可能となる。そこで、仕分け手段8の振分け枠8aが左右何れかの仕分け位置に回動して空容器を仕分けた後、該振分け枠8aが仕分け位置から初期位置の戻った時の計量器(第一の容器検知手段)9の出力を判断することで、正常に仕分けされたか否かを判断することができる。即ち、前記のように不正行為により投入されたPETボトル(空容器)aが後部搬送手段4上(初期位置)に引き戻された場合、前記計量器(第一の容器検知手段)9の出力(重量値)が、重量値「大」(ボトル有り)→重量値「小」(ボトル無し)→重量値「大」(ボトル有り)と変化し、不正の疑いがあると推測できる。尚、正常に仕分けられた場合、前記計量器(第一の容器検知手段)9の出力(重量値)は、重量値「大」(ボトル有り)→重量値「小」(ボトル無し)→重量値「小」(ボトル無し)と変化する。
このように計量器(第一の容器検知手段)9で空容器があるか否かを判断する場合、通常、例えばロードセル式の計量器で物の重さを判断する場合、物を計量部に載せた場合、出力される重量値が安定するまでには一定の時間がかかる。しかし、本発明の計量器(第一の容器検知手段)では、空容器の正確な重量を計量する必要はないので、空容器が仕分けられ、計量器から出力される重量値がゼロになり、その後に、不正により空容器が戻された場合は、空容器が計量器に載ることで、計量器から一定の重量でないにしろ重量が出力されるようになる、このような状態を把握することで、仕分けられた後に、空容器が検知されたと判断することが可能になる。
【0039】
(S16)…(S6)で検知されたPETボトル(空容器)aのバーコードから読み出されたデポジット額を付与し、その金額と日時データ、及び(S6)で読み出したバーコード情報、商品名等をRAM30に記憶する。
(S17)…(S16)で付与されたデポジット額がチケットに印字されて発行される。そして、前記チケットを取得したボトル提供者は、該チケットを店員のいるレジに持っていき、差し出すことで、該デポジット額の金額を受け取ることができる。
(S18)…(S15)で仕分け手段の振分け枠8aが仕分け位置から初期位置に戻った時の計量器(第一の容器検知手段)9の出力(重量値)により、後部搬送手段4上にPETボトル(空容器)aが載っていると判断され、不正の疑いがあるので、後部搬送手段4及び前部搬送手段3の駆動用モータを逆回転駆動して、後部搬送手段4上のPETボトル(空容器)aを投入口に戻し、装置から排出する。
(S19)…そして、例えば、表示部に「店員をお呼び下さい。」等のエラーメッセージをエラー音と共に表示する。また、「デポジット額は生成されなかった。」旨の表示をしてもよい。
(S20)…(S8)で投入したPETボトル(空容器)aの重量が基準重量値より重いと判断され、(S9)で前部搬送手段3を逆回転駆動して当該PETボトル(空容器)aを投入口側に戻したので、例えば、表示部に「中身を捨ててから再度、投入して下さい。」等のエラーメッセージを表示する。
【0040】
上記フローチャートの(S16)で記憶されたデポジット額を付与した履歴情報は、例えば、店舗の営業終了時に上位の管理装置へ送信され管理するようにしてもよい。また、前記履歴情報は装置のRAM30内に記憶するようにしたが、前記上位の管理装置の記憶部に直接記憶し、管理するようにしてもよい。
また、(S14)で、仕分けセンサ(1)、(2)がONになった際、つまり、仕分け手段8の仕分け枠8aが初期位置に位置した時に、計量器(第一の容器検知手段)9に物があるか否かを判断するようにしたが、これに限らず、(S12)で仕分けセンサ(1)、(2)がOFFになり、仕分けされた後、該仕分けセンサ(1)、(2)がONになるまでの間(仕分け手段8が初期位置に戻るまでの間)に計量器(第一の容器検知手段)9に空容器があると判断されたかを判断し、空容器があると判断した場合にはデポジット、特典を付与しないよう制御してもよい。この場合、空容器が仕分けられれば、通常であれば後段へ移行するので、再び計量器(第一の容器検知手段)9により空容器があると検出されることはないが、空容器に紐等をつけておき、該紐が引かれて該容器が引き戻される場合には、仕分け手段8が初期位置に戻る過程で一緒に空容器が引き戻されて不正が行われる可能性がある。このような場合でも、一旦、仕分け手段8による仕分けされた後に空容器が検出された場合は、不正の疑いがあるのでデポジットや特典を付与しないようにする。つまり、仕分け手段8により仕分けされた後(仕分けセンサ(1)、(2)がONになった後)、仕分け手段8が初期位置に移動する過程、更に、初期位置に位置したときに、例えば計量器からなる第一の容器検知手段9により空容器が検出されない場合に、デポジットや特典を付与するようにする。
【0041】
また、仕分け手段8の駆動モータ22が(S11)で駆動され、(S12)で仕分けセンサ(1)、(2)がOFFになる前(仕分け位置に位置する前)であっても、通常は空容器が仕分けられることで計量器(第一の容器検知手段)9から出力される計量値は小さくなるが、仕分けセンサ(1)、(2)がOFFになる前に、計量器(第一の容器検知手段)9から出力される計量値が増える場合には、前記と同様に空容器が引き戻されることで、該引き戻された空容器が計量器(第一の容器検知手段)9上に位置し、一旦減った計量値が増えていると推測できるので、このような場合においても、デポジットや特典を付与しないよう制御してもよい。
つまり、CPU25は仕分け手段8の駆動モータ22が駆動し仕分けが開始した後に、第一の容器検知手段である計量器9から空容器を検出した信号を受けたか否かを常に監視している。なお、一つの空容器が装置へ投入され、デポジットを付与する、あるいは、しないを判断し、デポジットを付与する場合には、(S17)で示したようにチケットを発行し、付与しない場合は、(S19)でエラー表示をするまで、次の空容器の投入口からの受け入れを許可しないので、仕分け手段8が駆動した後に、次の空容器のために計量器9の計量値が増えることはない。
【0042】
また、更に、(S11)から(S14)までの間に、容器検出用カメラ16(第二の容器検知手段)が空容器を検出し、しかも、空容器が装置内から投入口へ移動する方向であった場合には、デポジット、特典を付与しないようにしてもよい。つまり、(S11)で仕分け手段の駆動モータ22が駆動した直後に、空容器に紐等が付けられており、その紐を投入口の外から引っ張ることで空容器を投入口外へ引き戻そうとした場合、仕分け手段8が初期位置から仕分け位置へ移動し、初期位置へ戻る間に、容器検出用カメラ16(第二の容器検出手段)が空容器を検出し、しかも、空容器が装置内から投入口へ移動する方向と判断された場合には、不正により空容器が引き戻されたと判断してデポジットや特典を付与しないよう制御する。
【0043】
前記の実施の形態とは異なり、前に投入した空容器のデポジット付与等の処理が完了する前に、次の空容器を投入可能なようにしてもよい。つまり、(S11)から(S14)までの間に、容器検出用カメラ16(第二の容器検知手段)が空容器を検出した場合であっても、投入口から装置内方向へ移動する空容器が検知された場合には、次の空容器が検知されたと判断する。すなわち、仕分け手段8により後段へ空容器を送っている間に、次の空容器が投入され、前部搬送手段3にて空容器の種別等が検知されるようになるので、前の空容器に対してデポジット付与等の処理が完了する前に、次の空容器を投入することができるので、単位時間当たりの処理量を増やすことができる。そして、前部搬送手段3での容器種別の検知が完了しても、仕分け手段8での仕分けが完了していない場合には、前部搬送手段3上に位置する空容器は後部搬送手段4へ移行しないようにする。これにより、前の空容器に対する仕分けが完了する前に計量器(第一の容器検知手段)9の計量値が増えることがないようにすることができる。
【0044】
上記実施の形態では、後部搬送手段4に設けた計量器(第一の容器検知手段)9から出力される仕分け手段8の動作前後の重量値の情報に基づいてデポジットを付与するか否かを判断したが、例えば、仕分け手段8の初期位置(後部搬送手段4)上に空容器を検知するセンサを設け、該センサの検知と、仕分け手段8の振分け枠8aが仕分け位置から初期位置に戻ったという情報(前記仕分けセンサ(1)23aと仕分けセンサ(2)23bのON/OFF情報)に基づき、デポジットを付与するか否かを判断するようにしてもよい。但し、この場合は不正行為により空容器が戻される場合を考慮し、前記後部搬送手段4上の初期位置全域を把握できるように、センサを多数設ける必要がある。
【0045】
また、仕分け手段8の初期位置(後部搬送手段4上)における容器の有無を検出する第一の容器検知手段9は、前記した計量器、或いはセンサに限らず、後部搬送手段4上を撮影するカメラとしてもよい。即ち、後部搬送手段4上にカメラを配置し、仕分け手段8の振分け枠8aが仕分け位置から初期位置に戻ったという情報(前記仕分けセンサ(1)23aと仕分けセンサ(2)23bのON/OFF情報)と、その時の後部搬送手段4上を撮像した画像データにより、該後部搬送手段4上の空容器の有無を検知して、デポジットを付与するかを判断するようにしてもよい。
【0046】
上記構成の空容器回収装置は、投入された空容器を仕分け手段の位置へ搬送する過程の前段で、空容器の種別を検知し、その種別検知の情報に基づいて後段に配置した仕分け手段の動作方向(仕分け方向)を決定し、且つ、該仕分け手段が仕分け位置から初期位置に戻った(移動した)時の、該初期位置における空容器の有無を検知してデポジット(或いは特典)の付与を決定するようにしたので、不正行為によるデポジットの取得を防止することができる。
また、前記デポジット付与を決定する仕分け手段の初期位置における空容器の有無検出(第一の容器検知手段)を、該初期位置(後部搬送手段)における重量を計量する計量器、或いはセンサ、カメラとしたことで、減容手段付近にセンサを配置し、該センサで空容器の通過の有無を検知して、デポジット付与を判断した従来構造と比べて、第一の容器検知手段のメンテナンスの煩わしさ、及びセンサの汚れによる誤検知等の問題を解消することができる。
【0047】
本発明に係る空容器回収装置は図示した実施の形態に限定されず、本発明の要旨を変更しない範囲内で適宜変更可能である。
(1)実施の形態では、PETボトル(空容器)の色(有色/無色(透明))により仕分ける方向を変える例を示したが、これに限らず、例えば、PETボトルと缶(アルミ缶、スチール缶)、或いはアルミ缶とスチール缶に仕分けるようにしてもよい。この場合、転動支持手段に移載した空容器を回転させて該容器に貼付されたバーコードから容器の種別情報を読み出す、或いは、前部搬送手段の下部に金属検知器を設け、PETボトルか、その他の金属系の容器かを識別するようにしてもよい。
(2)実施の形態では、仕分け手段を門型の枠体で構成した例を示したが、これに限らず、例えば搬送手段の両側に、搬送される空容器を移載支持するローラ部材を配置し、そのローラ部材を左右何れかに傾けて仕分けるようにしてもよい。この場合、搬送手段が水平である位置を初期位置とし、左右の何れかに傾けられた位置を送り位置とし、搬送手段が初期位置と送り位置との間を移動するようになる。また、装置内に投入され仕分けのために待機している空容器の一方の側部に回転するローラ部材が、例えば上方から出現し、その回転するローラと空容器とが接触することで、該空容器が一方向へ弾き飛ばされることで、仕分けるようにしてもよい。この場合、仕分ける側と反対の空容器の側部に前記回転するローラ部材が出現するようになる。この場合は、空容器は回転するローラ部材と接触するだけでローラの回転方向へ弾き飛ばされるので、前記実施の形態のように初期位置、仕分け位置(送り位置)は有さないことになる。
(3)実施の形態では、空容器の投入をカメラが撮影した画像の変化で検知する例を示したが、これに限らず、例えば、投入口に光学センサを設け、該センサによる検知信号で空容器の投入を判断するようにしてもよい。
(4)実施の形態では、前部搬送手段から後部搬送手段へ乗り移ったかの判断を、前部搬送手段上方に配置したカメラの画像の変化で判断したが、これに限らず、例えば、前部搬送手段と後部搬送手段との間に光学センサを配置し、該センサの検知内容の変化(容器先端検知、検知継続、検知なし)で判断するようにしてもよい。
(5)実施の形態では、空容器に付されたバーコードのバーコード情報を取得するためにバーコード用カメラ(種別検知手段)で該バーコードを撮像する例で示したが、バーコードの他に、例えば一定の国に販売したことを示す情報をコード化したものが、バーコードと共に付されており、そのコードの情報も、バーコード情報と共に取得するようにしてもよい。つまり、バーコード情報を取得するための専用のカメラでなく、他の情報も併せて取得するカメラであってもよい。
(6)実施の形態では、仕分け手段が送り手段に相当し、仕分けをして後段に位置する減容手段へ送る説明をしたが、仕分け(振分け)機能は有さず、例えば前記仕分け手段にて、必ず一方向のみに振るようにし、決まった方向へ容器を送る送り手段であってもよい。
(7)実施の形態では、減容手段の直前にセンサを設けない構成の例により説明をしたが、減容手段の直前にセンサを設けて、該センサにより検知されるとデポジットや特典を付与する場合であっても、該センサを検知した後に、第一の容器検知手段である計量器9で空容器が検知された場合には、付与するとカウントされたデポジットを、付与しないように制御してもよい。つまり、センサで空容器が検知されてから、一定時間を待ってその間に計量器(第一の容器検知手段)9にて容器が検出されるか否かにより、正式にデポジットを付与するか否かを決定するようにしてもよい。
【符号の説明】
【0048】
A…空容器回収装置 a…PETボトル(空容器)
2…投入口 3…前部搬送手段(搬送路)
4…後部搬送手段(搬送路) 5…転動支持手段
6…上下移動手段 7…バーコード用カメラ(種別検知手段)
8…仕分け手段(送り手段) 9…計量器(第一の容器検知手段)
10…減容手段 11…プリンタ
16…容器検出用カメラ(第二の容器検知手段)
25…CPU(制御手段)
【特許請求の範囲】
【請求項1】
投入口から投入され回収される空容器に対しデポジット或いは特典を付与する空容器回収装置において、
前記投入された空容器を後段に送る送り手段と、
前記送り手段が配置されている領域における空容器の有無を検知する第一の容器検知手段と、
前記送り手段の動作後、前記第一の容器検知手段により空容器が検知されたとき前記デポジット或いは特典の付与をせず、前記送り手段の動作後、前記第一の容器検知手段により空容器が検知されないとき前記デポジット或いは特典の付与をする制御手段と、
を備えることを特徴とする空容器回収装置。
【請求項2】
前記投入された空容器の種別を検知する種別検知手段を有し、前記送り手段は、該種別検知手段により検知された空容器の種別情報に基づき仕分けをする仕分け手段であることを特徴とする請求項1記載の空容器回収装置。
【請求項3】
前記第一の容器検知手段は、重量を計量する計量器であることを特徴とする請求項1又は2記載の空容器回収装置。
【請求項4】
前記送り手段の後段に減容手段を備えることを特徴とする請求項1乃至3の何れか1項記載の空容器回収装置。
【請求項5】
前記計量器の略直上に前記仕分け手段が位置していることを特徴とする請求項3記載の空容器回収装置。
【請求項6】
前記投入口から投入された空容器を装置内へ案内する搬送路と、
該搬送路を通る空容器を検知する第二の容器検知手段と、を有し、
前記送り手段が前記搬送路の後段に設けられ、
前記送り手段が動作している間に、前記第二の容器検知手段により空容器が検知された時前記デポジット或いは特典の付与をしないことを特徴とする請求項1乃至5の何れか1項記載の空容器回収装置。
【請求項7】
前記第二の容器検知手段は、空容器の移動する向きを更に検知し、該第二の容器検知手段が、前記空容器が装置内から前記投入口へ移動すると判断した時、前記デポジット或いは特典の付与をしないことを特徴とする請求項6記載の空容器回収装置。
【請求項1】
投入口から投入され回収される空容器に対しデポジット或いは特典を付与する空容器回収装置において、
前記投入された空容器を後段に送る送り手段と、
前記送り手段が配置されている領域における空容器の有無を検知する第一の容器検知手段と、
前記送り手段の動作後、前記第一の容器検知手段により空容器が検知されたとき前記デポジット或いは特典の付与をせず、前記送り手段の動作後、前記第一の容器検知手段により空容器が検知されないとき前記デポジット或いは特典の付与をする制御手段と、
を備えることを特徴とする空容器回収装置。
【請求項2】
前記投入された空容器の種別を検知する種別検知手段を有し、前記送り手段は、該種別検知手段により検知された空容器の種別情報に基づき仕分けをする仕分け手段であることを特徴とする請求項1記載の空容器回収装置。
【請求項3】
前記第一の容器検知手段は、重量を計量する計量器であることを特徴とする請求項1又は2記載の空容器回収装置。
【請求項4】
前記送り手段の後段に減容手段を備えることを特徴とする請求項1乃至3の何れか1項記載の空容器回収装置。
【請求項5】
前記計量器の略直上に前記仕分け手段が位置していることを特徴とする請求項3記載の空容器回収装置。
【請求項6】
前記投入口から投入された空容器を装置内へ案内する搬送路と、
該搬送路を通る空容器を検知する第二の容器検知手段と、を有し、
前記送り手段が前記搬送路の後段に設けられ、
前記送り手段が動作している間に、前記第二の容器検知手段により空容器が検知された時前記デポジット或いは特典の付与をしないことを特徴とする請求項1乃至5の何れか1項記載の空容器回収装置。
【請求項7】
前記第二の容器検知手段は、空容器の移動する向きを更に検知し、該第二の容器検知手段が、前記空容器が装置内から前記投入口へ移動すると判断した時、前記デポジット或いは特典の付与をしないことを特徴とする請求項6記載の空容器回収装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−10614(P2013−10614A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−144975(P2011−144975)
【出願日】平成23年6月29日(2011.6.29)
【出願人】(000145068)株式会社寺岡精工 (317)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月29日(2011.6.29)
【出願人】(000145068)株式会社寺岡精工 (317)
【Fターム(参考)】
[ Back to top ]