
空席判定装置、及び、空席判定方法
【課題】乗員の体格や姿勢等に拘わらずシート上の乗員の存否を正確に判定することのできる空席判定装置、及び、空席判定方法を提供する。
【解決手段】距離画像データを取得する距離画像センサ4を設ける。取得したデータを直交座標画像と平面投影二値画像に変換するデータ変換手段40と、変換した画像を基にシートバック位置とシートクッションの位置を推定する位置推定手段25,26を設ける。さらに、シート以外の物体が存在することを意味する特徴量が、直交座標画像や平面投影二値画像のシートバックとシートクッションの各推定位置に含まれるか否かを判定する物体存否判定手段27,28を設ける。両物体存否判定手段27,28がともに特徴量が含まれていないものと判定したときに空席と判定する最終判定手段29を設ける。
【解決手段】距離画像データを取得する距離画像センサ4を設ける。取得したデータを直交座標画像と平面投影二値画像に変換するデータ変換手段40と、変換した画像を基にシートバック位置とシートクッションの位置を推定する位置推定手段25,26を設ける。さらに、シート以外の物体が存在することを意味する特徴量が、直交座標画像や平面投影二値画像のシートバックとシートクッションの各推定位置に含まれるか否かを判定する物体存否判定手段27,28を設ける。両物体存否判定手段27,28がともに特徴量が含まれていないものと判定したときに空席と判定する最終判定手段29を設ける。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、距離画像データを基にしてシート上に乗員が存在するか否かを判定する空席判定装置、及び、空席判定方法に関するものである。
【背景技術】
【0002】
車両のシート部分を距離画像センサによって斜め上方から撮影し、その撮影データを解析することによってシート上の乗員の有無や体格等を検出する乗員検出装置が案出されている(例えば、特許文献1〜5参照)。
【0003】
特許文献1,2に記載の装置は、距離画像センサによって取得した距離画像データを基にしてシートと乗員の表面形状を検出し、その検出した表面形状と予め記憶されているデータを比較することによって乗員の体格等を検出するものである。
【0004】
特許文献3に記載の装置は、距離画像センサによって取得した距離画像データを基にしてシートボトムが検出されているか否かを判定し、シートボトムが検出されていない場合に乗員がシートに着座しているものと判定するものである。
【0005】
特許文献4に記載の装置は、距離画像センサによって取得した距離画像データを基にしてシートの縫い目によるエッジ(基準線)を検出し、そのエッジの検出状態に応じて乗員の有無を判定するものである。
【0006】
特許文献5に記載の装置は、距離画像センサによって取得した距離画像データを基にしてシート付近の反射位置の凹凸形状やエッジを検出し、その検出結果に応じて乗員の有無等を判定するものである。
【0007】
また、距離画像センサを用いない空席判定装置の技術としては、車室内の天井部からシートに向けて光の照射を行い、反射位置がシートの座面であるか乗員の大腿部であるかによって空席を判定するものも案出されている(例えば、特許文献6参照)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2008−2838号公報
【特許文献2】特開2007−22401号公報
【特許文献3】特表2004−503759号公報
【特許文献4】特開2002−8021号公報
【特許文献5】特開平11−78657号公報
【特許文献6】特開平11−14753号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、上記のいずれの装置においても、乗員がシート上の偏った位置にいる場合、特に、シートに着座する乗員が体積の小さい子供で、しかも、その子供がシート上で立ち上がったり、横になったりしている場合には、シート上の乗員の存否を正確に判定することが難しい。
【0010】
そこでこの発明は、乗員の体格や姿勢等に拘わらずシート上の乗員の存否を正確に判定することのできる空席判定装置、及び、空席判定方法を提供しようとするものである。
【課題を解決するための手段】
【0011】
請求項1に係る発明は、シート(例えば、実施形態のシート1B)に乗員が存在するか否かを判定する空席判定装置において、シート部分の距離画像データを取得する距離画像センサ(例えば、実施形態の距離画像センサ4)と、この距離画像センサで取得した距離画像データを、前記シートの前後方向、上下方向、左右方向を軸とした直交座標画像に変換するとともに、その直交座標画像を平面に投影した平面投影二値画像に変換するデータ変換手段(例えば、実施形態のデータ変換手段40)と、このデータ変換手段によって高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して上下方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートバック位置と推定するシートバック位置推定手段(例えば、実施形態のシートバック位置推定手段25)と、前記データ変換手段によって高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して前後方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートクッション位置と推定するシートクッション位置推定手段(例えば、実施形態のシートクッション位置推定手段26)と、シートバック以外の物体が存在することを意味する特徴量が、前記データ変換手段によって変換された平面投影二値画像または直交座標画像の前記シートバックの推定位置に含まれているか否かを判定するシートバック側物体存否判定手段(例えば、実施形態のシートバック側物体存否判定手段27)と、シートクッション以外の物体が存在することを意味する特徴量が、前記データ変換手段によって変換された平面投影二値画像または直交座標データの前記シートクッションの推定位置に含まれているか否かを判定するシートクッション側物体存否判定手段(例えば、実施形態のシートクッション側物体存否判定手段28)と、前記シートバック側物体存否判定手段と前記シートクッション側物体存否判定手段が、ともに前記特徴量が含まれていないものと判定したときに空席と判定する最終判定手段(例えば、実施形態の最終判定手段29)と、を備えていることを特徴とするものである。
これにより、距離画像センサが取得したシート部分の距離画像データを基に、シートバック位置推定手段とシートクッション位置推定手段がシートバックの位置とシートクッションの位置をそれぞれ推定し、これらの推定した各位置において、シートバック側物体存否判定手段とシートクッション側物体存否判定手段が平面投影二値画像や直交座標画像に対して特徴量の有無を判定するようになる。そして、このときいずれの判定でも「特徴量が含まれていない」との判定が為された場合に、最終判定手段が空席と判定する。
【0012】
請求項2に係る発明は、請求項1に記載の空席判定装置において、前記シートバック側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートバックの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素のシート前後方向の分布に基づいて対象物のシート前後方向の肉厚を求め、その肉厚が空席時にはあり得ない閾値以上の値である場合に、特徴量が含まれているものと判定することを特徴とするものである。
これにより、乗員がシートバックに近接して存在する場合には、シートバックの推定位置を含む画素の探索を行ったときに、画素の分布から求まる対象物のシート前後方向の肉厚が閾値以上に大きくなることから、シートバック側物体存否判定手段は、特徴量が含まれている(空席でない)ものと判定する。また、画素の分布から求まる対象物のシート前後方向の肉厚が閾値に満たない場合には、シートバック側物体存否判定手段は、特徴量が含まれていないものと判定する。
【0013】
請求項3に係る発明は、請求項1または2に記載の空席判定装置において、前記シートバック側物体存否判定手段は、前記データ変換手段が変換した直交座標画像を基にして前記シートバックの推定位置における対象物のシート幅方向での前面の凹凸形状を求め、前記シートバックの推定位置のシート幅方向の中央領域が左右の領域よりも突出している場合、または、シート幅方向の左右の領域の少なくともいずれか一方に空席時にはあり得ない閾値以上に突出する部分が存在している場合に、特徴量が含まれているものと判定することを特徴とするものである。
これにより、乗員がシートバックの幅方向の中央領域に位置する場合には、シートバックの推定位置のシート幅方向の中央領域が左右の領域よりも突出することから、シートバック側物体存否判定手段は、特徴量が含まれている(空席でない)ものと判定する。さらに、乗員がシートバックの幅方向の左右のいずれかの領域に偏って位置する場合には、シート幅方向の左右のいずれかの領域が乗員とシートバックの厚みによって閾値以上に突出することから、シートバック側物体存否判定手段は、特徴量が含まれている(空席でない)ものと判定する。この場合、乗員によってシートバックが隠蔽されて、画素の探索からは乗員分の厚みしか検出されない状況であっても、シート上の乗員の存在が確実に判定されることになる。また、シートバックの推定位置のシート幅方向の中央領域が左右の領域よりも突出せず、しかも、シート幅方向の左右のいずれの領域も閾値以上に突出しない場合には、シートバック側物体存否判定手段は、特徴量が含まれていないものと判定する。
【0014】
請求項4に係る発明は、請求項1〜3のいずれか1項に記載の空席判定装置において、前記シートクッション側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートクッションの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素のシート上下方向の分布に基づいて対象物のシート上下方向の肉厚を求め、その肉厚が空席時にはあり得ない閾値以上の値である場合に、特徴量が含まれているものと判定することを特徴とするものである。
これにより、乗員がシートクッション上に存在する場合には、シートクッションの推定位置を含む範囲で画素の探索を行ったときに、画素の分布から求まる対象物のシート上下方向の肉厚が閾値以上に大きくなることから、シートクッション側物体存否判定手段は、特徴量が含まれている(空席でない)ものと判定する。また、画素の分布から求まる対象物のシート上下方向の肉厚が閾値に満たない場合には、シートクッション側物体存否判定手段は、特徴量が含まれていないものと判定する。
【0015】
請求項5に係る発明は、請求項1〜4のいずれか1項に記載の空席判定装置において、前記シートクッション側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートクッションの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素によって座面部近似直線を求め、その座面部近似直線上の任意の点の高さが空席時にはあり得ない閾値以上の値の場合に、特徴量が含まれているものと判定することを特徴とするものである。
これにより、乗員がシートクッション上に存在する場合には、探索画素から求まる座面位置近似直線が空席時よりも全体的に高くなることから、座面位置近似直線上の点の高さは空席時にはあり得ない閾値以上の値となる。このとき、シートクッション側物体存否判定手段は、特徴量が含まれている(空席でない)ものと判定する。この場合、乗員によってシートクッションが隠蔽されて、画素の探索からは乗員分の厚みしか検出されない状況であっても、シートクッション側物体存否判定手段によりシート上の乗員の存在が確実に判定されることになる。また、座面位置近似直線上の点の高さが空席時にはあり得ない閾値以上の値にならない場合には、シートクッション側物体存否判定手段は、特徴量が含まれていないものと判定する。
【0016】
請求項6に係る発明は、請求項1〜5のいずれか1項に記載の空席判定装置において、前記シートクッション側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートクッションの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素によって座面部近似直線を求め、その座面部近似直線の傾斜角度が空席時にはあり得ない角度である場合に、特徴量が含まれているものと判定することを特徴とするものである。
これにより、例えば、子供がシートクッション上に横になっている場合には、シートクッション上の前後方向の中央領域が上方に隆起することになることから、探索画素から求まる座面位置近似直線の傾斜角度は空席時にはあり得ない角度となる。このとき、シートクッション側物体存否判定手段は、特徴量が含まれている(空席でない)ものと判定する。この場合、画素の探索によってシート上下方向の厚みや座面部近似直線の高さを調べても乗員の存在を判定しにくい情況であっても、シートクッション上の乗員の存在が確実に判定されることになる。また、探索画素から求まる座面部近似直線の傾斜角度が空席時にはあり得ない角度でない場合には、シートクッション側物体存否判定手段は、特徴量が含まれていないものと判定する。
【0017】
請求項7に係る発明は、シートに乗員が存在するか否かを判定する空席判定方法において、シート部分の距離画像データを距離画像センサによって取得し、この距離画像センサで取得した距離画像データを、前記シートの前後方向、上下方向、左右方向を軸とした直交座標画像に変換するとともに、さらにその直交座標画像を平面に投影した平面投影二値画像に変換し、高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して上下方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートバック位置と推定し、高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して前後方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートクッション位置と推定し、シートバック以外の物体が存在することを意味する特徴量が、前記平面投影二値画像または直交座標画像の前記シートバックの推定位置に含まれているか否かを判定するとともに、シートクッション以外の物体が存在することを意味する特徴量が、前記平面投影二値画像または直交座標画像の前記シートクッションの推定位置に含まれているか否かを判定し、シートバックの推定位置とシートクッションの推定位置のいずれにも前記特徴量が含まれていないものと判定した場合に、空席と判定することを特徴とするものである。
【発明の効果】
【0018】
この発明によれば、距離画像センサが取得したシート部分の距離画像データを基に、シートバック位置推定手段とシートクッション位置推定手段がシートバックの位置とシートクッションの位置を推定し、これらの推定した各位置において、平面投影二値画像や直交座標画像に対して特徴量の有無を判定するため、乗員の体格や姿勢等に拘わらずシート上の乗員の存否を正確に判定することができる。
【図面の簡単な説明】
【0019】
【図1】この発明の一実施形態の空席判定装置を採用した車両の車室内の斜視図である。
【図2】この発明の一実施形態の空席判定装置の概略構成図である。
【図3】この発明の一実施形態の空席判定装置の画像処理の一部のイメージを示す図である。
【図4】この発明の一実施形態の空席判定装置の制御の流れを示すフローチャートである。
【図5】この発明の一実施形態の空席判定装置の制御の流れを示すフローチャートである。
【図6】この発明の一実施形態の空席判定装置の制御の流れを示すフローチャートである。
【図7】この発明の一実施形態の空席判定装置の画像処理過程で得られる平面投影二値画像である。
【図8】この発明の一実施形態の空席判定装置の画素探索のイメージを示す図である。
【図9】この発明の一実施形態の空席判定装置の画素探索のイメージを示す図である。
【図10】この発明の一実施形態の空席判定装置の画素探索のイメージを示す図である。
【図11】この発明の一実施形態の空席判定装置における背もたれ部近似直線の算出のイメージと前後方向の肉厚算出のイメージを示す図である。
【図12】この発明の一実施形態の空席判定装置のシートバック形状の算出のイメージを示す図である。
【図13】この発明の一実施形態の空席判定装置のシートバック形状の算出のイメージを示す図である。
【図14】この発明の一実施形態の空席判定装置の画素探索のイメージを示す図である。
【図15】この発明の一実施形態の空席判定装置における座面部近似直線の算出のイメージを示す図である。
【図16】この発明の一実施形態の空席判定装置における上下方向の肉厚算出のイメージを示す図である。
【図17】この発明の一実施形態の空席判定装置における座面部近似直線の高さの比較のイメージを示す図である。
【図18】この発明の一実施形態の空席判定装置における座面部近似直線の傾斜角度の比較のイメージを示す図である。
【発明を実施するための形態】
【0020】
以下、この発明の一実施形態を図面に基づいて説明する。
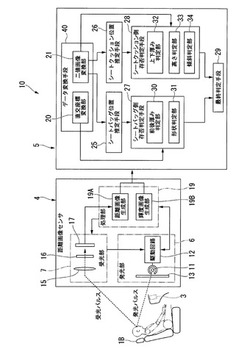
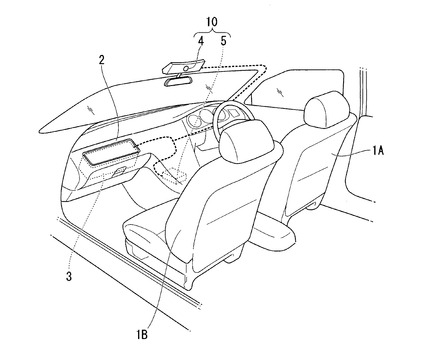
図1は、この実施形態の空席判定装置10を採用した車両の車室内を示す図であり、同図中1A,1Bは、運転席側と助手席側のシート、2は、前席前方に配置されたインストルメントパネル、3は、インストルメントパネル2内の助手席前方位置に配置されたエアバッグモジュールである。また、4は、運転席と助手席の間の天井部に助手席側に向けて設置された単眼式の距離画像センサであり、5は、距離画像センサ4の検出信号を受けて助手席の乗員の有無を判定し、衝撃の入力時に、その判定結果に応じてエアバッグモジュール3の作動を制御する制御装置である。
空席判定装置10は、距離画像センサ4と制御装置5を主要な要素として構成され、距離画像センサ4で取得した距離画像データに対して各種の画像処理を行い、その画像処理の結果に基づいて、助手席の乗員の有無を判定する。
【0021】
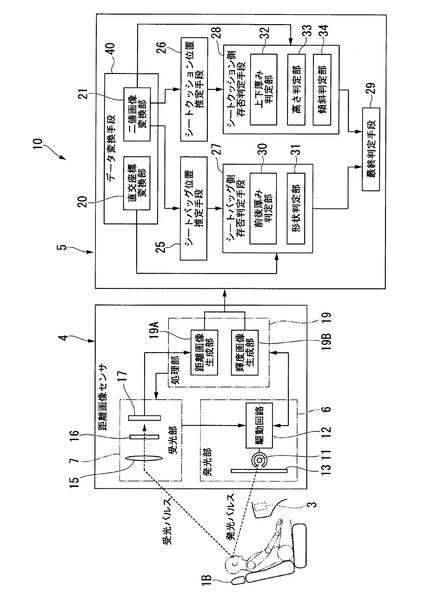
図2は、空席判定装置10の概略構成を示す図である。
この実施形態の距離画像センサ4は、照射された光が対象物で反射し戻ってくるまでの時間を計測し、その時間を基にして対象物までの距離を求めるTOF(time of flight)方式のセンサを採用している。
距離画像センサ4は、発光部6が、近赤外線LED11と、近赤外線LED11を所定周波数でパルス発光させる駆動回路12と、近赤外線LED11の光を散乱させて対象物に照射する散乱板13と、によって構成され、受光部7が、対象物で反射した光を集光する集光レンズ15と、ノイズ光を除去するフィルター16と、フィルター16を透過した光のエネルギーを電荷として蓄積し電圧信号に変換するCCD撮像素子17と、によって構成されている。そして、距離画像センサ4は、発光部6と受光部7が処理部19によって制御され、処理部19内の距離画像生成部19Aと輝度画像生成部19Bが発光パルスと受光パルスの位相のずれを基にして距離画像データと輝度画像データを生成するようになっている。
距離画像センサ4の処理部19で生成された距離画像データと輝度画像データは制御装置5に出力される。
【0022】
制御装置5は、距離画像センサ4から入力された距離画像データを、シート1Bの前後方向(T方向)、左右方向(B方向)、上下方向(H方向)を軸とした直交座標画像に変換する直交座標変換部20と、直交座標画像を、二軸を含む平面に投影した平面投影二値画像に変換する二値画像変換部21とを備えている。二値画像変換部21は、必ずしも直交する三平面の全てに投影した3種の二値画像に変換する必要はないが、少なくともシート1Bの前後方向と上下方向を含む平面に投影した二値画像に変換する。
この実施形態においては、直交座標変換部20と二値画像変換部21がデータ変換手段40を構成している。
【0023】
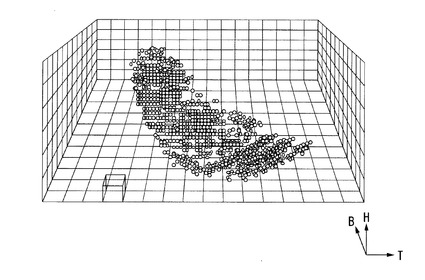
図3は、直交座標変換部20での処理の一部のイメージを示したものである。
直交座標変換部20では、距離画像センサ4で取得した距離画像データを、図3に示すように、シート1Bを中心とした直交座標内の細分化した立方体空間(voxel)にあてはめ、対象物の表面形状を数値化する。
二値画像変換部21は、直交座標変換部20で得られた対象物の表面形状をシート1Bの側方から見える平面に投影した平面投影二値画像に変換し、その後の画像処理に備える。
【0024】
また、制御装置5は、二値画像変換部21で変換した平面投影二値画像に対して画素の探索を行ってシートバックとシートクッションの位置をそれぞれ推定するシートバック位置推定手段25、及び、シートクッション位置推定手段26と、平面投影二値画像や直交座標画像内のシートバック推定位置SBとシートクッション推定位置SCに、シートバックやシートクッション以外の物体が存在することを意味する特徴量が含まれているか否かを判定するシートバック側物体存否判定手段27、及び、シートクッション側物体存否判定手段28と、シートバック側物体存否判定手段27とシートクッション側物体存否判定手段28の判定結果に基づいてシート1B上に乗員が存在するか否かを判定する最終判定手段29と、を備えている。制御装置5は、最終判定手段29の判定結果を反映させて、助手席側のエアバッグモジュール3の衝突時における作動の有無を制御する。
【0025】
シートバック側物体存否判定手段27は、平面投影二値画像上の画素の分布からシートバック推定位置SBにおける判定対象物のシート前後方向の肉厚を求め、その求めた肉厚が空席時にはあり得ない閾値以上の値であるか否かを判定する前後厚み判定部30と、直交座標画像を基にしてシートバック推定位置SBにおける判定対象物のシート幅方向での前面の凹凸形状を求め、その求めた凹凸形状が空席時にはあり得ない特徴を持つか否かを判定する形状判定部31と、を備えている。これらの前後厚み判定部30と形状判定部31の機能詳細については後に説明する。
【0026】
また、シートクッション側物体存否判定手段28は、平面投影二値画像上の画素の分布からシートクッション推定位置SCにおける判定対象物のシート上下方向の肉厚を求め、その求めた肉厚が空席時にはあり得ない閾値以上の値であるか否かを判定する上下厚み判定部32と、平面投影二値画像上の画素の分布から対象物の座面部の概略高さを求め、そこで求めた座面部の概略高さが空席時にはあり得ない閾値以上の値であるか否かを判定する高さ判定部33と、高さ判定部33と同様にして求めた対象物の座面部の傾斜角度が空席時にはあり得ない角度であるか否かを判定する傾斜判定部34と、を備えている。これらの高さ判定部33と傾斜判定部34についても機能の詳細は後に説明する。
【0027】
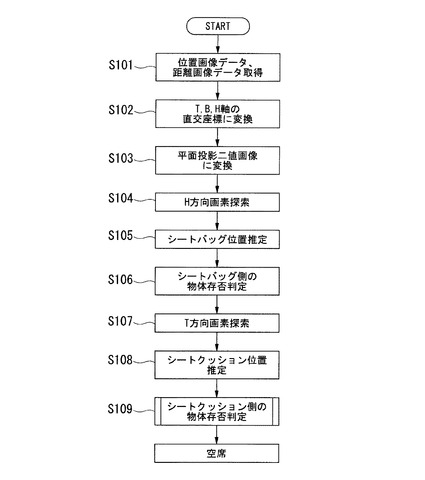
つづいて、制御装置5による処理の概要を図4〜図6のフローチャートに沿って説明する。
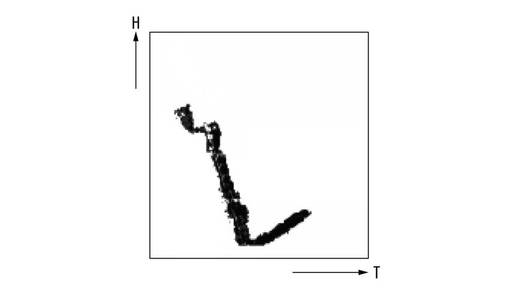
最初に、ステップS101において、距離画像センサ4から距離画像と輝度画像のデータを受け取り、ステップS102において、距離画像をT軸,B軸,H軸を持つ直交座標画像に変換する。次に、ステップS103において、直交座標画像を上下方向と前後方向を含む平面投影二値画像に変換する。ここまでの処理は、データ変換手段40によって行われる。図7は、このとき得られた平面投影二値画像の一例を示す。
【0028】
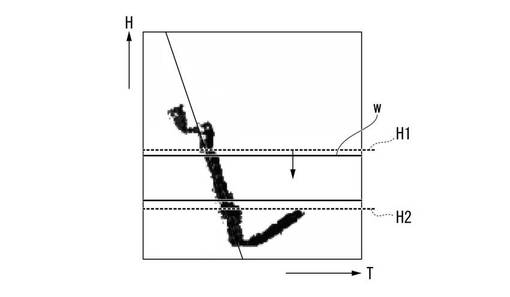
ステップS104においては、ステップS103で得られた平面投影二値画像に対し、図8に示すように、上下方向(H方向)の予め設定した探索区間H1〜H2内で上方から下方に向かって画素の探索を行う。この探索では、例えば、所定面積の矩形状の探索窓wを上方から下方に向かって移動させ、その間に探索窓w内に保持される物体の存在を示す画素の数を調べる。
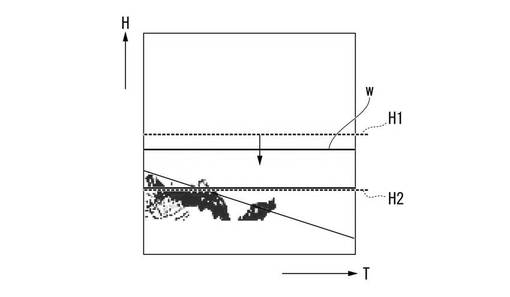
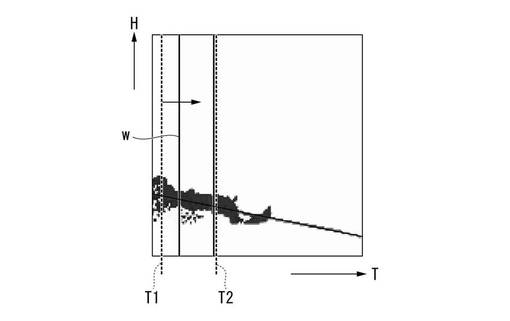
次のステップS105においては、ステップS104の探索結果に基づき画素の数が閾値以上に多い上下方向の領域をシートバック位置と推定する。このステップS105では、例えば、上記の探索窓内に保持される画素の数が最も多い区間が、規定値以上の画素数である場合に、その区間をシートバック位置と推定する。また、ステップS104の探索において、図9に示すように、H2まで探索を行ってもシートバック位置と推定できる区間が存在しない場合には、シートバックがリクライニング状態(後方に大きく倒されている状態)である可能性が高いため、例えば、図10に示すように、シートバックの存在する可能性の高い後方側の所定区間T1〜T2に対して後方側から前方側に向かって上記と同様に画素の探索を行い、それによってシートバックの存在を確認する。ステップS104,S105の処理はシートバック位置推定手段25によって行われる。
【0029】
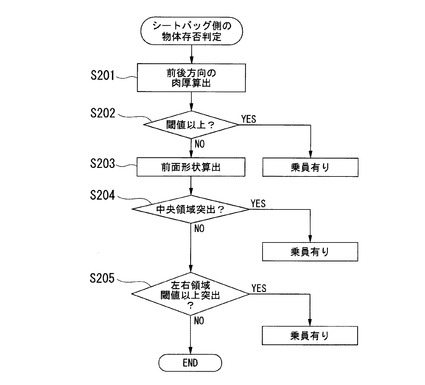
つづくステップS106では、シートバック側の物体の存否の判定を行う(シートバック側物体存否判定手段27での処理)。図5は、ステップS106の処理の詳細を示すものである。
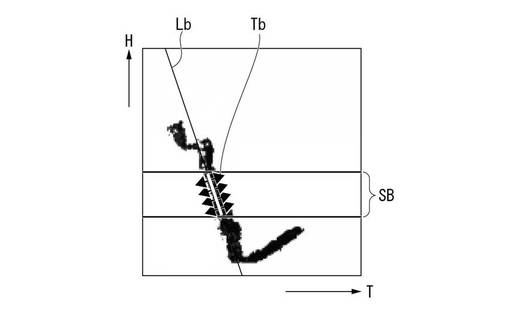
図5のステップS201においては、図11に示すように、平面投影二値画像上のシートバック推定位置SBにある画素に対して、高さ方向(H方向)の平均値列を算出し、その平均値列から最小二乗法にて背もたれ部近似直線Lbを求める。そして、背もたれ部近似直線Lbと直交する直線上にある全画素の直線Lbとの平均離間距離を2倍したものを対象物のシート前後方向の肉厚Tbとして算出する。
【0030】
ステップS202においては、ステップS201で求めた肉厚Tbが空席時にはあり得ない閾値以上の値であるか否かを判定し、ここでYesの場合には、「乗員有り」(特徴量が含まれている)と判定し、Noの場合には、ステップS203へと進む。
乗員がシートバック部分に存在する場合には、シートバック自体の厚みに乗員の厚みを加算した厚みが検出されるはずであるが、シートバックが乗員によって距離画像センサ4から隠蔽される場合には、乗員の厚みだけが検出されることになり、空席との違いが現れにくい。ステップS203以降の処理はこれに対処するためのものである。
【0031】
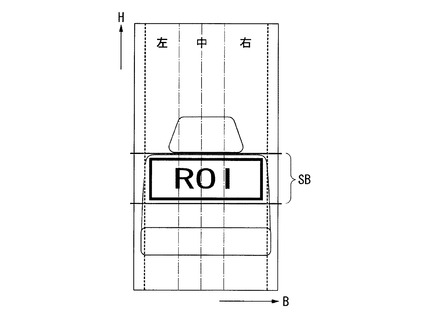
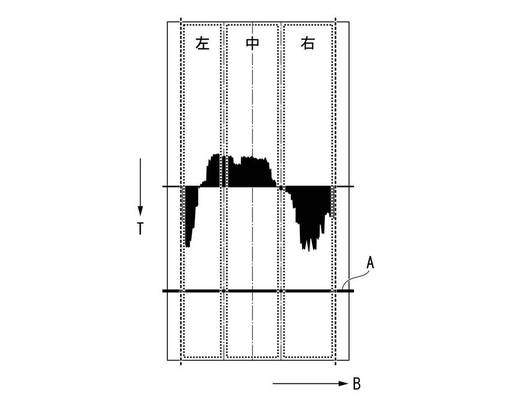
ステップS203においては、直交座標画像上のシートバック推定位置SBにある画素を調べることにより、シートバック推定位置SBにおける対象物の前面の凹凸形状をシート幅方向に亘って検出する。この場合、例えば、図12に示すように、直交座標画像を基にシートバックの前面視におけるシートバック推定位置SBのROI(Region of Interest)を作成し、そのROIにおける前面の凹凸高さをシート幅方向の左領域、中央領域、右領域に分けて調べる。図13は、前記ROIにおける前面の凹凸高さ(画素の分布)を調べた結果を示す図であり、同図ではシート幅方向(B方向)の左右の領域が中央領域よりも突出している。
【0032】
次のステップS204においては、ステップS203での調査結果に基づき、シート幅方向の中央領域が左右の領域よりも突出しているか否かを判定し、ここでYesの場合には、「乗員有り」(特徴量が含まれている)と判定し、Noの場合には、ステップS205へと進む。
シートバックの幅方向の両側部には前方に膨出するサイトサポート部が有り、空席時にはサイドサポート部が中央領域よりも前方に突出して検出されるが、乗員がシートバックの幅方向中央に存在している場合には、シート幅方向の中央領域が左右の領域よりも突出して検出される。ステップS204では、このことに着目して特徴量の有無を判定している。
ところが、乗員は必ずしもシートバックの中央に存在するとは限らず、シートバックの左右の一方側に偏って存在する場合には、ステップS204において特徴量として現れない。次のステップS205はこれに対処するためのものである。
【0033】
ステップS205においては、ステップS203での調査結果に基づき、シート幅方向の左右の少なくともいずれか一方の領域に空席時にはあり得ない閾値A(図13参照)以上に突出する領域が存在するか否かを判定し、ここでYesの場合には、「乗員有り」(特徴量が含まれている)と判定し、Noの場合には、シートバック側の物体存否判定の処理を終了し、図4のステップS107へと進む。
【0034】
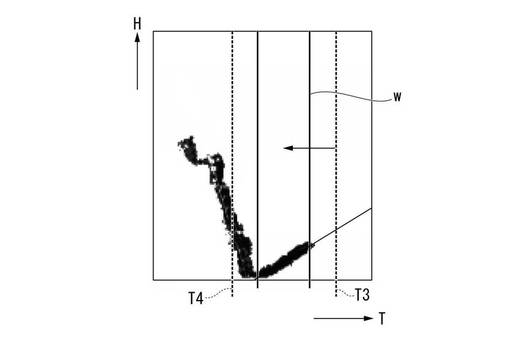
ステップS107においては、ステップS103で得られた平面投影二値画像に対し、図14に示すように、前後方向(T方向)の予め設定した探索区間T3〜T4内で前後方向に画素の探索を行う。この画素探索では、前述と同様に、例えば、探索窓wを前後方向に移動させ、その間に探索窓w内に保持される物体の存在を示す画素の数を調べる。
【0035】
次のステップS108においては、ステップS107の探索結果に基づき画素の数が閾値以上に多い前後方向の領域をシートクッション位置と推定する。このステップS108では、例えば、上記の探索窓w内に保持される画素の数が、規定値以上となる最初の区間をシートクッション位置と推定する。ここまでのステップS107,S108の処理はシートクッション位置推定手段26によって行われる。
【0036】
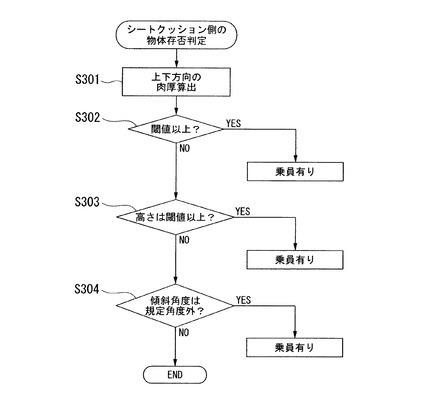
次のステップS109においては、シートクッション側の物体の存否の判定を行う(シートクッション側物体存否判定手段28での処理)。図6は、ステップS109の処理の詳細を示すものである。
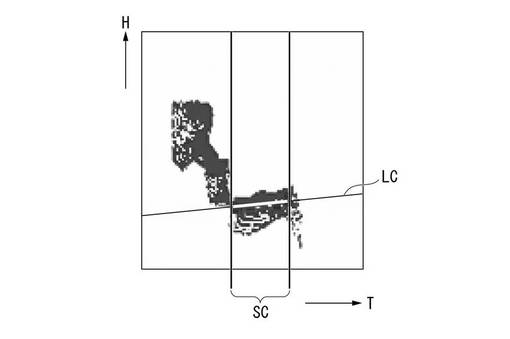
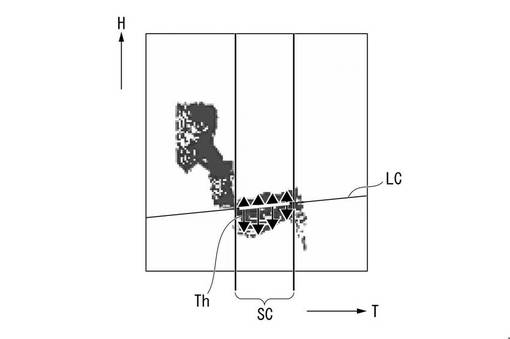
図6のステップS301においては、平面投影二値画像上のシートクッション推定位置SCにある画素に対して、前後方向(T方向)の平均値列を算出し、その平均値列から最小二乗法にて、図15に示す座面部近似直線Lcを求める。そして、図16に示すように、座面部近似直線Lcと直交する直線上にある全画素の直線Lcとの平均離間距離を2倍したものをシート上下方向の対象物の肉厚Thとして算出する。
【0037】
つづくステップS302においては、ステップS301で求めた肉厚Thが空席時にはあり得ない閾値以上の値であるか否かを判定し、ここでYesの場合には、「乗員有り」(特徴量が含まれている)と判定し、Noの場合には、ステップS303へと進む。
乗員がシートクッション上に存在する場合には、シートクッション自体の厚みに乗員の厚みを加算した厚みが検出されるはずであるが、シートクッションが乗員によって距離画像センサ4から隠蔽される場合には、空席との違いが現れにくくなる。このため、次のステップS303ではこれに対処するための処理を行う。
【0038】
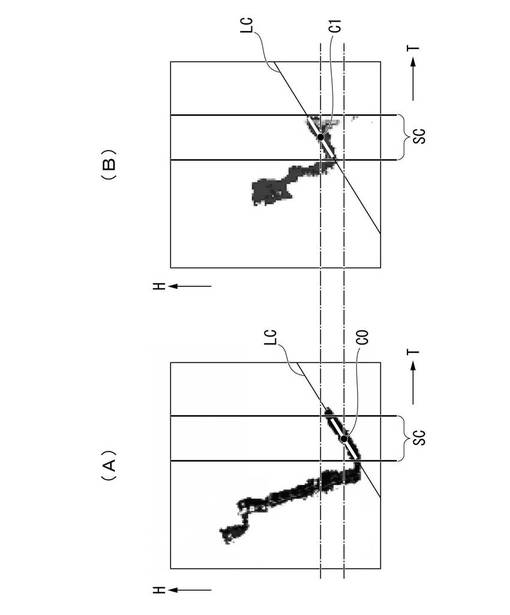
ステップS303では、ステップS301で求めた座面部近似直線Lc上の点が空席時にはあり得ない閾値以上の値であるか否かを判定する。具体的には、例えば、図17(B)に示すように、シートクッション推定位置Scの範囲での座面部近似直線Lcの上下方向の中心点C1を求め、その中心点C1の値が、空席時の座面部近似直線Lc(図17(A)参照)の上下方向の中心点C0としてあり得ない閾値以上の値であるか否かを判定する。そして、ここでYesの場合には、「乗員有り」(特徴量が含まれている)と判定し、Noの場合には、ステップS304へと進む。
ここで、乗員がシートクッション上に普通に着座している場合には、上記のステップS302,S303のいずれかで「乗員有り」の判定が為されるはずであるが、例えば、子供がシートクッション上で横になっている場合には、空席との違いが現れにくい。このため、次のステップS304ではこれに対処するための処理を行う。
【0039】
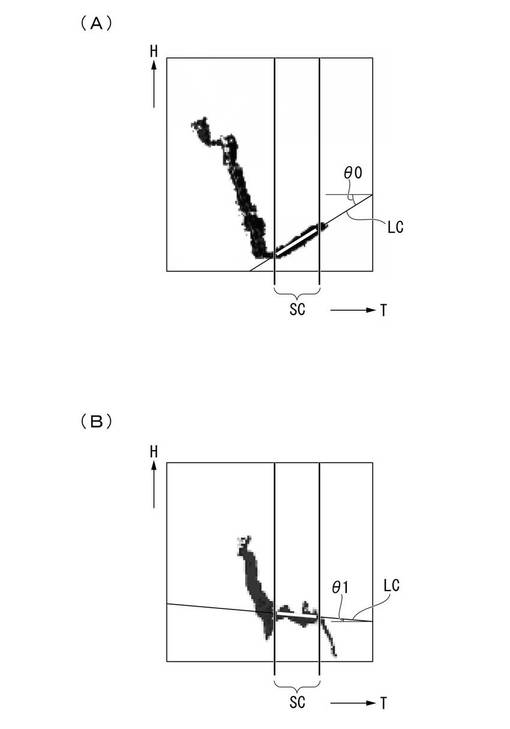
即ち、ステップS304では、ステップS301で求めた座面部近似直線Lcの傾斜角度θ1(図18(B)参照)を求め、その傾斜角度θ1が空席時の傾斜角度θ0(図18(A)参照)としてはあり得ない角度であるか否かを判定する。具体的には、空席時には、図18(A)に示すように、座面部近似直線Lcが後方に所定角度の範囲で下方傾斜するはずであるが、子供がシートクッション上で横になっている場合には、図18(B)に示すように、座面部前端側が子供よりも低位となって前方に下方傾斜するため、座面部近似直線Lcの傾斜角度θ1を基にして子供等が存在することを判定することができる。つまり、このステップS304でYesの場合には、「乗員有り」(特徴量が含まれている)と判定し、Noの場合には、シートクッション側の物体存否判定の処理を終了する。シートクッション側の物体存否判定の処理を終了した後には、図4の処理に戻り、「空席である」(特徴量が含まれていない)ものと判定する。
【0040】
以上のように、この空席判定装置10は、距離画像センサ4が取得したシート1B部分の距離画像データを基に、画像処理によってシートバックの位置とシートクッションの位置をそれぞれ推定し、これらの各推定位置において、平面投影二値画像や直交座標画像に対して物体の存在を意味する特徴量が含まれているか否かを判定するようにしているため、乗員の体格や姿勢に拘わらず、例えば、子供がシート1B上で立ち上がったり、横になっていたりする場合であっても、シート1B上の乗員の有無を正確に判定することができる。
【0041】
特に、この実施形態の空席判定装置10は、シートバックの推定位置で物体の存否を判定するにあたって、対象物のシート前後方向の肉厚が閾値以上の値であるか否かの判定を行った後に、閾値以上でない場合に、さらにシートバックの前面側の凹凸形状を基にした特徴量の有無の判定を行うようにしているため、シートバックが乗員によって隠蔽される場合においても、シートバックの推定位置での物体の存否を正確に判定することができる。
【0042】
また、この実施形態の空席判定装置10は、シートクッションの推定位置で物体の存否を判定するにあたって、対象物のシート上下方向の肉厚が閾値以上の値であるか否かの判定を行った後に、閾値以上でない場合に、さらにシートクッションの高さを基にした特徴量の有無の判定を行うようにしているため、シートクッションが乗員によって隠蔽される場合においても、シートクッションの推定位置での物体の存否を正確に判定することができる。
【0043】
さらに、この実施形態の空席判定装置10においては、シートクッションの推定位置で物体の存否を判定するにあたって、対象物のシート上下方向の肉厚が閾値以上の値であるか否かの判定を行い、さらにシートクッションの高さを基にした特徴量の有無の判定を行った後に、座面部近似直線Lcの傾斜角度を基にして特徴量の有無を判定するようにしているため、子供がシートクッション上に横になっている場合にも、シートクッションの推定位置での子供の存否を正確に判定することができる。
【0044】
なお、この発明は上記の実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々の設計変更が可能である。
【符号の説明】
【0045】
1B…シート
4…距離画像センサ
25…シートバック位置推定手段
26…シートクッション位置推定手段
27…シートバック側物体存否判定手段
28…シートクッション側物体存否判定手段
29…最終判定手段
40…データ変換手段
【技術分野】
【0001】
この発明は、距離画像データを基にしてシート上に乗員が存在するか否かを判定する空席判定装置、及び、空席判定方法に関するものである。
【背景技術】
【0002】
車両のシート部分を距離画像センサによって斜め上方から撮影し、その撮影データを解析することによってシート上の乗員の有無や体格等を検出する乗員検出装置が案出されている(例えば、特許文献1〜5参照)。
【0003】
特許文献1,2に記載の装置は、距離画像センサによって取得した距離画像データを基にしてシートと乗員の表面形状を検出し、その検出した表面形状と予め記憶されているデータを比較することによって乗員の体格等を検出するものである。
【0004】
特許文献3に記載の装置は、距離画像センサによって取得した距離画像データを基にしてシートボトムが検出されているか否かを判定し、シートボトムが検出されていない場合に乗員がシートに着座しているものと判定するものである。
【0005】
特許文献4に記載の装置は、距離画像センサによって取得した距離画像データを基にしてシートの縫い目によるエッジ(基準線)を検出し、そのエッジの検出状態に応じて乗員の有無を判定するものである。
【0006】
特許文献5に記載の装置は、距離画像センサによって取得した距離画像データを基にしてシート付近の反射位置の凹凸形状やエッジを検出し、その検出結果に応じて乗員の有無等を判定するものである。
【0007】
また、距離画像センサを用いない空席判定装置の技術としては、車室内の天井部からシートに向けて光の照射を行い、反射位置がシートの座面であるか乗員の大腿部であるかによって空席を判定するものも案出されている(例えば、特許文献6参照)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2008−2838号公報
【特許文献2】特開2007−22401号公報
【特許文献3】特表2004−503759号公報
【特許文献4】特開2002−8021号公報
【特許文献5】特開平11−78657号公報
【特許文献6】特開平11−14753号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、上記のいずれの装置においても、乗員がシート上の偏った位置にいる場合、特に、シートに着座する乗員が体積の小さい子供で、しかも、その子供がシート上で立ち上がったり、横になったりしている場合には、シート上の乗員の存否を正確に判定することが難しい。
【0010】
そこでこの発明は、乗員の体格や姿勢等に拘わらずシート上の乗員の存否を正確に判定することのできる空席判定装置、及び、空席判定方法を提供しようとするものである。
【課題を解決するための手段】
【0011】
請求項1に係る発明は、シート(例えば、実施形態のシート1B)に乗員が存在するか否かを判定する空席判定装置において、シート部分の距離画像データを取得する距離画像センサ(例えば、実施形態の距離画像センサ4)と、この距離画像センサで取得した距離画像データを、前記シートの前後方向、上下方向、左右方向を軸とした直交座標画像に変換するとともに、その直交座標画像を平面に投影した平面投影二値画像に変換するデータ変換手段(例えば、実施形態のデータ変換手段40)と、このデータ変換手段によって高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して上下方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートバック位置と推定するシートバック位置推定手段(例えば、実施形態のシートバック位置推定手段25)と、前記データ変換手段によって高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して前後方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートクッション位置と推定するシートクッション位置推定手段(例えば、実施形態のシートクッション位置推定手段26)と、シートバック以外の物体が存在することを意味する特徴量が、前記データ変換手段によって変換された平面投影二値画像または直交座標画像の前記シートバックの推定位置に含まれているか否かを判定するシートバック側物体存否判定手段(例えば、実施形態のシートバック側物体存否判定手段27)と、シートクッション以外の物体が存在することを意味する特徴量が、前記データ変換手段によって変換された平面投影二値画像または直交座標データの前記シートクッションの推定位置に含まれているか否かを判定するシートクッション側物体存否判定手段(例えば、実施形態のシートクッション側物体存否判定手段28)と、前記シートバック側物体存否判定手段と前記シートクッション側物体存否判定手段が、ともに前記特徴量が含まれていないものと判定したときに空席と判定する最終判定手段(例えば、実施形態の最終判定手段29)と、を備えていることを特徴とするものである。
これにより、距離画像センサが取得したシート部分の距離画像データを基に、シートバック位置推定手段とシートクッション位置推定手段がシートバックの位置とシートクッションの位置をそれぞれ推定し、これらの推定した各位置において、シートバック側物体存否判定手段とシートクッション側物体存否判定手段が平面投影二値画像や直交座標画像に対して特徴量の有無を判定するようになる。そして、このときいずれの判定でも「特徴量が含まれていない」との判定が為された場合に、最終判定手段が空席と判定する。
【0012】
請求項2に係る発明は、請求項1に記載の空席判定装置において、前記シートバック側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートバックの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素のシート前後方向の分布に基づいて対象物のシート前後方向の肉厚を求め、その肉厚が空席時にはあり得ない閾値以上の値である場合に、特徴量が含まれているものと判定することを特徴とするものである。
これにより、乗員がシートバックに近接して存在する場合には、シートバックの推定位置を含む画素の探索を行ったときに、画素の分布から求まる対象物のシート前後方向の肉厚が閾値以上に大きくなることから、シートバック側物体存否判定手段は、特徴量が含まれている(空席でない)ものと判定する。また、画素の分布から求まる対象物のシート前後方向の肉厚が閾値に満たない場合には、シートバック側物体存否判定手段は、特徴量が含まれていないものと判定する。
【0013】
請求項3に係る発明は、請求項1または2に記載の空席判定装置において、前記シートバック側物体存否判定手段は、前記データ変換手段が変換した直交座標画像を基にして前記シートバックの推定位置における対象物のシート幅方向での前面の凹凸形状を求め、前記シートバックの推定位置のシート幅方向の中央領域が左右の領域よりも突出している場合、または、シート幅方向の左右の領域の少なくともいずれか一方に空席時にはあり得ない閾値以上に突出する部分が存在している場合に、特徴量が含まれているものと判定することを特徴とするものである。
これにより、乗員がシートバックの幅方向の中央領域に位置する場合には、シートバックの推定位置のシート幅方向の中央領域が左右の領域よりも突出することから、シートバック側物体存否判定手段は、特徴量が含まれている(空席でない)ものと判定する。さらに、乗員がシートバックの幅方向の左右のいずれかの領域に偏って位置する場合には、シート幅方向の左右のいずれかの領域が乗員とシートバックの厚みによって閾値以上に突出することから、シートバック側物体存否判定手段は、特徴量が含まれている(空席でない)ものと判定する。この場合、乗員によってシートバックが隠蔽されて、画素の探索からは乗員分の厚みしか検出されない状況であっても、シート上の乗員の存在が確実に判定されることになる。また、シートバックの推定位置のシート幅方向の中央領域が左右の領域よりも突出せず、しかも、シート幅方向の左右のいずれの領域も閾値以上に突出しない場合には、シートバック側物体存否判定手段は、特徴量が含まれていないものと判定する。
【0014】
請求項4に係る発明は、請求項1〜3のいずれか1項に記載の空席判定装置において、前記シートクッション側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートクッションの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素のシート上下方向の分布に基づいて対象物のシート上下方向の肉厚を求め、その肉厚が空席時にはあり得ない閾値以上の値である場合に、特徴量が含まれているものと判定することを特徴とするものである。
これにより、乗員がシートクッション上に存在する場合には、シートクッションの推定位置を含む範囲で画素の探索を行ったときに、画素の分布から求まる対象物のシート上下方向の肉厚が閾値以上に大きくなることから、シートクッション側物体存否判定手段は、特徴量が含まれている(空席でない)ものと判定する。また、画素の分布から求まる対象物のシート上下方向の肉厚が閾値に満たない場合には、シートクッション側物体存否判定手段は、特徴量が含まれていないものと判定する。
【0015】
請求項5に係る発明は、請求項1〜4のいずれか1項に記載の空席判定装置において、前記シートクッション側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートクッションの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素によって座面部近似直線を求め、その座面部近似直線上の任意の点の高さが空席時にはあり得ない閾値以上の値の場合に、特徴量が含まれているものと判定することを特徴とするものである。
これにより、乗員がシートクッション上に存在する場合には、探索画素から求まる座面位置近似直線が空席時よりも全体的に高くなることから、座面位置近似直線上の点の高さは空席時にはあり得ない閾値以上の値となる。このとき、シートクッション側物体存否判定手段は、特徴量が含まれている(空席でない)ものと判定する。この場合、乗員によってシートクッションが隠蔽されて、画素の探索からは乗員分の厚みしか検出されない状況であっても、シートクッション側物体存否判定手段によりシート上の乗員の存在が確実に判定されることになる。また、座面位置近似直線上の点の高さが空席時にはあり得ない閾値以上の値にならない場合には、シートクッション側物体存否判定手段は、特徴量が含まれていないものと判定する。
【0016】
請求項6に係る発明は、請求項1〜5のいずれか1項に記載の空席判定装置において、前記シートクッション側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートクッションの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素によって座面部近似直線を求め、その座面部近似直線の傾斜角度が空席時にはあり得ない角度である場合に、特徴量が含まれているものと判定することを特徴とするものである。
これにより、例えば、子供がシートクッション上に横になっている場合には、シートクッション上の前後方向の中央領域が上方に隆起することになることから、探索画素から求まる座面位置近似直線の傾斜角度は空席時にはあり得ない角度となる。このとき、シートクッション側物体存否判定手段は、特徴量が含まれている(空席でない)ものと判定する。この場合、画素の探索によってシート上下方向の厚みや座面部近似直線の高さを調べても乗員の存在を判定しにくい情況であっても、シートクッション上の乗員の存在が確実に判定されることになる。また、探索画素から求まる座面部近似直線の傾斜角度が空席時にはあり得ない角度でない場合には、シートクッション側物体存否判定手段は、特徴量が含まれていないものと判定する。
【0017】
請求項7に係る発明は、シートに乗員が存在するか否かを判定する空席判定方法において、シート部分の距離画像データを距離画像センサによって取得し、この距離画像センサで取得した距離画像データを、前記シートの前後方向、上下方向、左右方向を軸とした直交座標画像に変換するとともに、さらにその直交座標画像を平面に投影した平面投影二値画像に変換し、高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して上下方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートバック位置と推定し、高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して前後方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートクッション位置と推定し、シートバック以外の物体が存在することを意味する特徴量が、前記平面投影二値画像または直交座標画像の前記シートバックの推定位置に含まれているか否かを判定するとともに、シートクッション以外の物体が存在することを意味する特徴量が、前記平面投影二値画像または直交座標画像の前記シートクッションの推定位置に含まれているか否かを判定し、シートバックの推定位置とシートクッションの推定位置のいずれにも前記特徴量が含まれていないものと判定した場合に、空席と判定することを特徴とするものである。
【発明の効果】
【0018】
この発明によれば、距離画像センサが取得したシート部分の距離画像データを基に、シートバック位置推定手段とシートクッション位置推定手段がシートバックの位置とシートクッションの位置を推定し、これらの推定した各位置において、平面投影二値画像や直交座標画像に対して特徴量の有無を判定するため、乗員の体格や姿勢等に拘わらずシート上の乗員の存否を正確に判定することができる。
【図面の簡単な説明】
【0019】
【図1】この発明の一実施形態の空席判定装置を採用した車両の車室内の斜視図である。
【図2】この発明の一実施形態の空席判定装置の概略構成図である。
【図3】この発明の一実施形態の空席判定装置の画像処理の一部のイメージを示す図である。
【図4】この発明の一実施形態の空席判定装置の制御の流れを示すフローチャートである。
【図5】この発明の一実施形態の空席判定装置の制御の流れを示すフローチャートである。
【図6】この発明の一実施形態の空席判定装置の制御の流れを示すフローチャートである。
【図7】この発明の一実施形態の空席判定装置の画像処理過程で得られる平面投影二値画像である。
【図8】この発明の一実施形態の空席判定装置の画素探索のイメージを示す図である。
【図9】この発明の一実施形態の空席判定装置の画素探索のイメージを示す図である。
【図10】この発明の一実施形態の空席判定装置の画素探索のイメージを示す図である。
【図11】この発明の一実施形態の空席判定装置における背もたれ部近似直線の算出のイメージと前後方向の肉厚算出のイメージを示す図である。
【図12】この発明の一実施形態の空席判定装置のシートバック形状の算出のイメージを示す図である。
【図13】この発明の一実施形態の空席判定装置のシートバック形状の算出のイメージを示す図である。
【図14】この発明の一実施形態の空席判定装置の画素探索のイメージを示す図である。
【図15】この発明の一実施形態の空席判定装置における座面部近似直線の算出のイメージを示す図である。
【図16】この発明の一実施形態の空席判定装置における上下方向の肉厚算出のイメージを示す図である。
【図17】この発明の一実施形態の空席判定装置における座面部近似直線の高さの比較のイメージを示す図である。
【図18】この発明の一実施形態の空席判定装置における座面部近似直線の傾斜角度の比較のイメージを示す図である。
【発明を実施するための形態】
【0020】
以下、この発明の一実施形態を図面に基づいて説明する。
図1は、この実施形態の空席判定装置10を採用した車両の車室内を示す図であり、同図中1A,1Bは、運転席側と助手席側のシート、2は、前席前方に配置されたインストルメントパネル、3は、インストルメントパネル2内の助手席前方位置に配置されたエアバッグモジュールである。また、4は、運転席と助手席の間の天井部に助手席側に向けて設置された単眼式の距離画像センサであり、5は、距離画像センサ4の検出信号を受けて助手席の乗員の有無を判定し、衝撃の入力時に、その判定結果に応じてエアバッグモジュール3の作動を制御する制御装置である。
空席判定装置10は、距離画像センサ4と制御装置5を主要な要素として構成され、距離画像センサ4で取得した距離画像データに対して各種の画像処理を行い、その画像処理の結果に基づいて、助手席の乗員の有無を判定する。
【0021】
図2は、空席判定装置10の概略構成を示す図である。
この実施形態の距離画像センサ4は、照射された光が対象物で反射し戻ってくるまでの時間を計測し、その時間を基にして対象物までの距離を求めるTOF(time of flight)方式のセンサを採用している。
距離画像センサ4は、発光部6が、近赤外線LED11と、近赤外線LED11を所定周波数でパルス発光させる駆動回路12と、近赤外線LED11の光を散乱させて対象物に照射する散乱板13と、によって構成され、受光部7が、対象物で反射した光を集光する集光レンズ15と、ノイズ光を除去するフィルター16と、フィルター16を透過した光のエネルギーを電荷として蓄積し電圧信号に変換するCCD撮像素子17と、によって構成されている。そして、距離画像センサ4は、発光部6と受光部7が処理部19によって制御され、処理部19内の距離画像生成部19Aと輝度画像生成部19Bが発光パルスと受光パルスの位相のずれを基にして距離画像データと輝度画像データを生成するようになっている。
距離画像センサ4の処理部19で生成された距離画像データと輝度画像データは制御装置5に出力される。
【0022】
制御装置5は、距離画像センサ4から入力された距離画像データを、シート1Bの前後方向(T方向)、左右方向(B方向)、上下方向(H方向)を軸とした直交座標画像に変換する直交座標変換部20と、直交座標画像を、二軸を含む平面に投影した平面投影二値画像に変換する二値画像変換部21とを備えている。二値画像変換部21は、必ずしも直交する三平面の全てに投影した3種の二値画像に変換する必要はないが、少なくともシート1Bの前後方向と上下方向を含む平面に投影した二値画像に変換する。
この実施形態においては、直交座標変換部20と二値画像変換部21がデータ変換手段40を構成している。
【0023】
図3は、直交座標変換部20での処理の一部のイメージを示したものである。
直交座標変換部20では、距離画像センサ4で取得した距離画像データを、図3に示すように、シート1Bを中心とした直交座標内の細分化した立方体空間(voxel)にあてはめ、対象物の表面形状を数値化する。
二値画像変換部21は、直交座標変換部20で得られた対象物の表面形状をシート1Bの側方から見える平面に投影した平面投影二値画像に変換し、その後の画像処理に備える。
【0024】
また、制御装置5は、二値画像変換部21で変換した平面投影二値画像に対して画素の探索を行ってシートバックとシートクッションの位置をそれぞれ推定するシートバック位置推定手段25、及び、シートクッション位置推定手段26と、平面投影二値画像や直交座標画像内のシートバック推定位置SBとシートクッション推定位置SCに、シートバックやシートクッション以外の物体が存在することを意味する特徴量が含まれているか否かを判定するシートバック側物体存否判定手段27、及び、シートクッション側物体存否判定手段28と、シートバック側物体存否判定手段27とシートクッション側物体存否判定手段28の判定結果に基づいてシート1B上に乗員が存在するか否かを判定する最終判定手段29と、を備えている。制御装置5は、最終判定手段29の判定結果を反映させて、助手席側のエアバッグモジュール3の衝突時における作動の有無を制御する。
【0025】
シートバック側物体存否判定手段27は、平面投影二値画像上の画素の分布からシートバック推定位置SBにおける判定対象物のシート前後方向の肉厚を求め、その求めた肉厚が空席時にはあり得ない閾値以上の値であるか否かを判定する前後厚み判定部30と、直交座標画像を基にしてシートバック推定位置SBにおける判定対象物のシート幅方向での前面の凹凸形状を求め、その求めた凹凸形状が空席時にはあり得ない特徴を持つか否かを判定する形状判定部31と、を備えている。これらの前後厚み判定部30と形状判定部31の機能詳細については後に説明する。
【0026】
また、シートクッション側物体存否判定手段28は、平面投影二値画像上の画素の分布からシートクッション推定位置SCにおける判定対象物のシート上下方向の肉厚を求め、その求めた肉厚が空席時にはあり得ない閾値以上の値であるか否かを判定する上下厚み判定部32と、平面投影二値画像上の画素の分布から対象物の座面部の概略高さを求め、そこで求めた座面部の概略高さが空席時にはあり得ない閾値以上の値であるか否かを判定する高さ判定部33と、高さ判定部33と同様にして求めた対象物の座面部の傾斜角度が空席時にはあり得ない角度であるか否かを判定する傾斜判定部34と、を備えている。これらの高さ判定部33と傾斜判定部34についても機能の詳細は後に説明する。
【0027】
つづいて、制御装置5による処理の概要を図4〜図6のフローチャートに沿って説明する。
最初に、ステップS101において、距離画像センサ4から距離画像と輝度画像のデータを受け取り、ステップS102において、距離画像をT軸,B軸,H軸を持つ直交座標画像に変換する。次に、ステップS103において、直交座標画像を上下方向と前後方向を含む平面投影二値画像に変換する。ここまでの処理は、データ変換手段40によって行われる。図7は、このとき得られた平面投影二値画像の一例を示す。
【0028】
ステップS104においては、ステップS103で得られた平面投影二値画像に対し、図8に示すように、上下方向(H方向)の予め設定した探索区間H1〜H2内で上方から下方に向かって画素の探索を行う。この探索では、例えば、所定面積の矩形状の探索窓wを上方から下方に向かって移動させ、その間に探索窓w内に保持される物体の存在を示す画素の数を調べる。
次のステップS105においては、ステップS104の探索結果に基づき画素の数が閾値以上に多い上下方向の領域をシートバック位置と推定する。このステップS105では、例えば、上記の探索窓内に保持される画素の数が最も多い区間が、規定値以上の画素数である場合に、その区間をシートバック位置と推定する。また、ステップS104の探索において、図9に示すように、H2まで探索を行ってもシートバック位置と推定できる区間が存在しない場合には、シートバックがリクライニング状態(後方に大きく倒されている状態)である可能性が高いため、例えば、図10に示すように、シートバックの存在する可能性の高い後方側の所定区間T1〜T2に対して後方側から前方側に向かって上記と同様に画素の探索を行い、それによってシートバックの存在を確認する。ステップS104,S105の処理はシートバック位置推定手段25によって行われる。
【0029】
つづくステップS106では、シートバック側の物体の存否の判定を行う(シートバック側物体存否判定手段27での処理)。図5は、ステップS106の処理の詳細を示すものである。
図5のステップS201においては、図11に示すように、平面投影二値画像上のシートバック推定位置SBにある画素に対して、高さ方向(H方向)の平均値列を算出し、その平均値列から最小二乗法にて背もたれ部近似直線Lbを求める。そして、背もたれ部近似直線Lbと直交する直線上にある全画素の直線Lbとの平均離間距離を2倍したものを対象物のシート前後方向の肉厚Tbとして算出する。
【0030】
ステップS202においては、ステップS201で求めた肉厚Tbが空席時にはあり得ない閾値以上の値であるか否かを判定し、ここでYesの場合には、「乗員有り」(特徴量が含まれている)と判定し、Noの場合には、ステップS203へと進む。
乗員がシートバック部分に存在する場合には、シートバック自体の厚みに乗員の厚みを加算した厚みが検出されるはずであるが、シートバックが乗員によって距離画像センサ4から隠蔽される場合には、乗員の厚みだけが検出されることになり、空席との違いが現れにくい。ステップS203以降の処理はこれに対処するためのものである。
【0031】
ステップS203においては、直交座標画像上のシートバック推定位置SBにある画素を調べることにより、シートバック推定位置SBにおける対象物の前面の凹凸形状をシート幅方向に亘って検出する。この場合、例えば、図12に示すように、直交座標画像を基にシートバックの前面視におけるシートバック推定位置SBのROI(Region of Interest)を作成し、そのROIにおける前面の凹凸高さをシート幅方向の左領域、中央領域、右領域に分けて調べる。図13は、前記ROIにおける前面の凹凸高さ(画素の分布)を調べた結果を示す図であり、同図ではシート幅方向(B方向)の左右の領域が中央領域よりも突出している。
【0032】
次のステップS204においては、ステップS203での調査結果に基づき、シート幅方向の中央領域が左右の領域よりも突出しているか否かを判定し、ここでYesの場合には、「乗員有り」(特徴量が含まれている)と判定し、Noの場合には、ステップS205へと進む。
シートバックの幅方向の両側部には前方に膨出するサイトサポート部が有り、空席時にはサイドサポート部が中央領域よりも前方に突出して検出されるが、乗員がシートバックの幅方向中央に存在している場合には、シート幅方向の中央領域が左右の領域よりも突出して検出される。ステップS204では、このことに着目して特徴量の有無を判定している。
ところが、乗員は必ずしもシートバックの中央に存在するとは限らず、シートバックの左右の一方側に偏って存在する場合には、ステップS204において特徴量として現れない。次のステップS205はこれに対処するためのものである。
【0033】
ステップS205においては、ステップS203での調査結果に基づき、シート幅方向の左右の少なくともいずれか一方の領域に空席時にはあり得ない閾値A(図13参照)以上に突出する領域が存在するか否かを判定し、ここでYesの場合には、「乗員有り」(特徴量が含まれている)と判定し、Noの場合には、シートバック側の物体存否判定の処理を終了し、図4のステップS107へと進む。
【0034】
ステップS107においては、ステップS103で得られた平面投影二値画像に対し、図14に示すように、前後方向(T方向)の予め設定した探索区間T3〜T4内で前後方向に画素の探索を行う。この画素探索では、前述と同様に、例えば、探索窓wを前後方向に移動させ、その間に探索窓w内に保持される物体の存在を示す画素の数を調べる。
【0035】
次のステップS108においては、ステップS107の探索結果に基づき画素の数が閾値以上に多い前後方向の領域をシートクッション位置と推定する。このステップS108では、例えば、上記の探索窓w内に保持される画素の数が、規定値以上となる最初の区間をシートクッション位置と推定する。ここまでのステップS107,S108の処理はシートクッション位置推定手段26によって行われる。
【0036】
次のステップS109においては、シートクッション側の物体の存否の判定を行う(シートクッション側物体存否判定手段28での処理)。図6は、ステップS109の処理の詳細を示すものである。
図6のステップS301においては、平面投影二値画像上のシートクッション推定位置SCにある画素に対して、前後方向(T方向)の平均値列を算出し、その平均値列から最小二乗法にて、図15に示す座面部近似直線Lcを求める。そして、図16に示すように、座面部近似直線Lcと直交する直線上にある全画素の直線Lcとの平均離間距離を2倍したものをシート上下方向の対象物の肉厚Thとして算出する。
【0037】
つづくステップS302においては、ステップS301で求めた肉厚Thが空席時にはあり得ない閾値以上の値であるか否かを判定し、ここでYesの場合には、「乗員有り」(特徴量が含まれている)と判定し、Noの場合には、ステップS303へと進む。
乗員がシートクッション上に存在する場合には、シートクッション自体の厚みに乗員の厚みを加算した厚みが検出されるはずであるが、シートクッションが乗員によって距離画像センサ4から隠蔽される場合には、空席との違いが現れにくくなる。このため、次のステップS303ではこれに対処するための処理を行う。
【0038】
ステップS303では、ステップS301で求めた座面部近似直線Lc上の点が空席時にはあり得ない閾値以上の値であるか否かを判定する。具体的には、例えば、図17(B)に示すように、シートクッション推定位置Scの範囲での座面部近似直線Lcの上下方向の中心点C1を求め、その中心点C1の値が、空席時の座面部近似直線Lc(図17(A)参照)の上下方向の中心点C0としてあり得ない閾値以上の値であるか否かを判定する。そして、ここでYesの場合には、「乗員有り」(特徴量が含まれている)と判定し、Noの場合には、ステップS304へと進む。
ここで、乗員がシートクッション上に普通に着座している場合には、上記のステップS302,S303のいずれかで「乗員有り」の判定が為されるはずであるが、例えば、子供がシートクッション上で横になっている場合には、空席との違いが現れにくい。このため、次のステップS304ではこれに対処するための処理を行う。
【0039】
即ち、ステップS304では、ステップS301で求めた座面部近似直線Lcの傾斜角度θ1(図18(B)参照)を求め、その傾斜角度θ1が空席時の傾斜角度θ0(図18(A)参照)としてはあり得ない角度であるか否かを判定する。具体的には、空席時には、図18(A)に示すように、座面部近似直線Lcが後方に所定角度の範囲で下方傾斜するはずであるが、子供がシートクッション上で横になっている場合には、図18(B)に示すように、座面部前端側が子供よりも低位となって前方に下方傾斜するため、座面部近似直線Lcの傾斜角度θ1を基にして子供等が存在することを判定することができる。つまり、このステップS304でYesの場合には、「乗員有り」(特徴量が含まれている)と判定し、Noの場合には、シートクッション側の物体存否判定の処理を終了する。シートクッション側の物体存否判定の処理を終了した後には、図4の処理に戻り、「空席である」(特徴量が含まれていない)ものと判定する。
【0040】
以上のように、この空席判定装置10は、距離画像センサ4が取得したシート1B部分の距離画像データを基に、画像処理によってシートバックの位置とシートクッションの位置をそれぞれ推定し、これらの各推定位置において、平面投影二値画像や直交座標画像に対して物体の存在を意味する特徴量が含まれているか否かを判定するようにしているため、乗員の体格や姿勢に拘わらず、例えば、子供がシート1B上で立ち上がったり、横になっていたりする場合であっても、シート1B上の乗員の有無を正確に判定することができる。
【0041】
特に、この実施形態の空席判定装置10は、シートバックの推定位置で物体の存否を判定するにあたって、対象物のシート前後方向の肉厚が閾値以上の値であるか否かの判定を行った後に、閾値以上でない場合に、さらにシートバックの前面側の凹凸形状を基にした特徴量の有無の判定を行うようにしているため、シートバックが乗員によって隠蔽される場合においても、シートバックの推定位置での物体の存否を正確に判定することができる。
【0042】
また、この実施形態の空席判定装置10は、シートクッションの推定位置で物体の存否を判定するにあたって、対象物のシート上下方向の肉厚が閾値以上の値であるか否かの判定を行った後に、閾値以上でない場合に、さらにシートクッションの高さを基にした特徴量の有無の判定を行うようにしているため、シートクッションが乗員によって隠蔽される場合においても、シートクッションの推定位置での物体の存否を正確に判定することができる。
【0043】
さらに、この実施形態の空席判定装置10においては、シートクッションの推定位置で物体の存否を判定するにあたって、対象物のシート上下方向の肉厚が閾値以上の値であるか否かの判定を行い、さらにシートクッションの高さを基にした特徴量の有無の判定を行った後に、座面部近似直線Lcの傾斜角度を基にして特徴量の有無を判定するようにしているため、子供がシートクッション上に横になっている場合にも、シートクッションの推定位置での子供の存否を正確に判定することができる。
【0044】
なお、この発明は上記の実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々の設計変更が可能である。
【符号の説明】
【0045】
1B…シート
4…距離画像センサ
25…シートバック位置推定手段
26…シートクッション位置推定手段
27…シートバック側物体存否判定手段
28…シートクッション側物体存否判定手段
29…最終判定手段
40…データ変換手段
【特許請求の範囲】
【請求項1】
シートに乗員が存在するか否かを判定する空席判定装置において、
シート部分の距離画像データを取得する距離画像センサと、
この距離画像センサで取得した距離画像データを、前記シートの前後方向、上下方向、左右方向を軸とした直交座標画像に変換するとともに、その直交座標画像を平面に投影した平面投影二値画像に変換するデータ変換手段と、
このデータ変換手段によって高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して上下方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートバック位置と推定するシートバック位置推定手段と、
前記データ変換手段によって高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して前後方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートクッション位置と推定するシートクッション位置推定手段と、
シートバック以外の物体が存在することを意味する特徴量が、前記データ変換手段によって変換された平面投影二値画像または直交座標画像の前記シートバックの推定位置に含まれているか否かを判定するシートバック側物体存否判定手段と、
シートクッション以外の物体が存在することを意味する特徴量が、前記データ変換手段によって変換された平面投影二値画像または直交座標データの前記シートクッションの推定位置に含まれているか否かを判定するシートクッション側物体存否判定手段と、
前記シートバック側物体存否判定手段と前記シートクッション側物体存否判定手段が、ともに前記特徴量が含まれていないものと判定したときに空席と判定する最終判定手段と、を備えていることを特徴とする空席判定装置。
【請求項2】
前記シートバック側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートバックの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素のシート前後方向の分布に基づいて対象物のシート前後方向の肉厚を求め、その肉厚が空席時にはあり得ない閾値以上の値である場合に、特徴量が含まれているものと判定することを特徴とする請求項1に記載の空席判定装置。
【請求項3】
前記シートバック側物体存否判定手段は、前記データ変換手段が変換した直交座標画像を基にして前記シートバックの推定位置における対象物のシート幅方向での前面の凹凸形状を求め、前記シートバックの推定位置のシート幅方向の中央領域が左右の領域よりも突出している場合、または、シート幅方向の左右の領域の少なくともいずれか一方に空席時にはあり得ない閾値以上に突出する部分が存在している場合に、特徴量が含まれているものと判定することを特徴とする請求項1または2に記載の空席判定装置。
【請求項4】
前記シートクッション側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートクッションの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素のシート上下方向の分布に基づいて対象物のシート上下方向の肉厚を求め、その肉厚が空席時にはあり得ない閾値以上の値である場合に、特徴量が含まれているものと判定することを特徴とする請求項1〜3のいずれか1項に記載の空席判定装置。
【請求項5】
前記シートクッション側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートクッションの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素によって座面部近似直線を求め、その座面部近似直線上の任意の点の高さが空席時にはあり得ない閾値以上の値の場合に、特徴量が含まれているものと判定することを特徴とする請求項1〜4のいずれか1項に記載の空席判定装置。
【請求項6】
前記シートクッション側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートクッションの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素によって座面部近似直線を求め、その座面部近似直線の傾斜角度が空席時にはあり得ない角度である場合に、特徴量が含まれているものと判定することを特徴とする請求項1〜5のいずれか1項に記載の空席判定装置。
【請求項7】
シートに乗員が存在するか否かを判定する空席判定方法において、
シート部分の距離画像データを距離画像センサによって取得し、
この距離画像センサで取得した距離画像データを、前記シートの前後方向、上下方向、左右方向を軸とした直交座標画像に変換するとともに、さらにその直交座標画像を平面に投影した平面投影二値画像に変換し、
高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して上下方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートバック位置と推定し、
高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して前後方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートクッション位置と推定し、
シートバック以外の物体が存在することを意味する特徴量が、前記平面投影二値画像または直交座標画像の前記シートバックの推定位置に含まれているか否かを判定するとともに、
シートクッション以外の物体が存在することを意味する特徴量が、前記平面投影二値画像または直交座標画像の前記シートクッションの推定位置に含まれているか否かを判定し、
シートバックの推定位置とシートクッションの推定位置のいずれにも前記特徴量が含まれていないものと判定した場合に、空席と判定することを特徴とする空席判定方法。
【請求項1】
シートに乗員が存在するか否かを判定する空席判定装置において、
シート部分の距離画像データを取得する距離画像センサと、
この距離画像センサで取得した距離画像データを、前記シートの前後方向、上下方向、左右方向を軸とした直交座標画像に変換するとともに、その直交座標画像を平面に投影した平面投影二値画像に変換するデータ変換手段と、
このデータ変換手段によって高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して上下方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートバック位置と推定するシートバック位置推定手段と、
前記データ変換手段によって高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して前後方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートクッション位置と推定するシートクッション位置推定手段と、
シートバック以外の物体が存在することを意味する特徴量が、前記データ変換手段によって変換された平面投影二値画像または直交座標画像の前記シートバックの推定位置に含まれているか否かを判定するシートバック側物体存否判定手段と、
シートクッション以外の物体が存在することを意味する特徴量が、前記データ変換手段によって変換された平面投影二値画像または直交座標データの前記シートクッションの推定位置に含まれているか否かを判定するシートクッション側物体存否判定手段と、
前記シートバック側物体存否判定手段と前記シートクッション側物体存否判定手段が、ともに前記特徴量が含まれていないものと判定したときに空席と判定する最終判定手段と、を備えていることを特徴とする空席判定装置。
【請求項2】
前記シートバック側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートバックの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素のシート前後方向の分布に基づいて対象物のシート前後方向の肉厚を求め、その肉厚が空席時にはあり得ない閾値以上の値である場合に、特徴量が含まれているものと判定することを特徴とする請求項1に記載の空席判定装置。
【請求項3】
前記シートバック側物体存否判定手段は、前記データ変換手段が変換した直交座標画像を基にして前記シートバックの推定位置における対象物のシート幅方向での前面の凹凸形状を求め、前記シートバックの推定位置のシート幅方向の中央領域が左右の領域よりも突出している場合、または、シート幅方向の左右の領域の少なくともいずれか一方に空席時にはあり得ない閾値以上に突出する部分が存在している場合に、特徴量が含まれているものと判定することを特徴とする請求項1または2に記載の空席判定装置。
【請求項4】
前記シートクッション側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートクッションの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素のシート上下方向の分布に基づいて対象物のシート上下方向の肉厚を求め、その肉厚が空席時にはあり得ない閾値以上の値である場合に、特徴量が含まれているものと判定することを特徴とする請求項1〜3のいずれか1項に記載の空席判定装置。
【請求項5】
前記シートクッション側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートクッションの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素によって座面部近似直線を求め、その座面部近似直線上の任意の点の高さが空席時にはあり得ない閾値以上の値の場合に、特徴量が含まれているものと判定することを特徴とする請求項1〜4のいずれか1項に記載の空席判定装置。
【請求項6】
前記シートクッション側物体存否判定手段は、前記データ変換手段によって上下方向と前後方向を含む平面に投影した平面投影二値画像に対し、前記シートクッションの推定位置を含む範囲で物体の存在を示す画素の探索を行い、その探索した画素によって座面部近似直線を求め、その座面部近似直線の傾斜角度が空席時にはあり得ない角度である場合に、特徴量が含まれているものと判定することを特徴とする請求項1〜5のいずれか1項に記載の空席判定装置。
【請求項7】
シートに乗員が存在するか否かを判定する空席判定方法において、
シート部分の距離画像データを距離画像センサによって取得し、
この距離画像センサで取得した距離画像データを、前記シートの前後方向、上下方向、左右方向を軸とした直交座標画像に変換するとともに、さらにその直交座標画像を平面に投影した平面投影二値画像に変換し、
高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して上下方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートバック位置と推定し、
高さ方向と前後方向を含む平面に投影した平面投影二値画像に対して前後方向に画素の探索を行い、物体の存在を示す画素の数が閾値以上に多い領域をシートクッション位置と推定し、
シートバック以外の物体が存在することを意味する特徴量が、前記平面投影二値画像または直交座標画像の前記シートバックの推定位置に含まれているか否かを判定するとともに、
シートクッション以外の物体が存在することを意味する特徴量が、前記平面投影二値画像または直交座標画像の前記シートクッションの推定位置に含まれているか否かを判定し、
シートバックの推定位置とシートクッションの推定位置のいずれにも前記特徴量が含まれていないものと判定した場合に、空席と判定することを特徴とする空席判定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図12】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図12】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−128671(P2012−128671A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−279650(P2010−279650)
【出願日】平成22年12月15日(2010.12.15)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月15日(2010.12.15)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]