
空気内部エネルギーの使用及び装置
【課題】効率的でコンパクトで製造費が低く都市のビルディングの屋根に設置できる風力タービンを提供する。
【解決手段】ノズル108の断面の減少により空気を加速し、空気の内部エネルギーを有用な運動エネルギーに変換する。運動エネルギーの増分は、空気の内部エネルギー即ち空気の温度の低下分と等しい。空気流の運動エネルギーを機械的エネルギーに変換するタービンを前記ノズル内に配置する。機械的エネルギーは、電気エネルギーに変換されるか或いはギヤボックスに伝達されて駆動モーメントを提供する。この方法を使用する装置は、空気流源として自然の風を使用してもよいし、人工空気流手段を使用してもよい。空気流を人工的に発生する手段を組み込んだ装置を、陸上、海上、及び航空の乗り物用のエンジンとして使用できる。空気の温度がノズル内で低下するため、水分が凝縮し、液体の水を別の用途のために溜めておくことができる。
【解決手段】ノズル108の断面の減少により空気を加速し、空気の内部エネルギーを有用な運動エネルギーに変換する。運動エネルギーの増分は、空気の内部エネルギー即ち空気の温度の低下分と等しい。空気流の運動エネルギーを機械的エネルギーに変換するタービンを前記ノズル内に配置する。機械的エネルギーは、電気エネルギーに変換されるか或いはギヤボックスに伝達されて駆動モーメントを提供する。この方法を使用する装置は、空気流源として自然の風を使用してもよいし、人工空気流手段を使用してもよい。空気流を人工的に発生する手段を組み込んだ装置を、陸上、海上、及び航空の乗り物用のエンジンとして使用できる。空気の温度がノズル内で低下するため、水分が凝縮し、液体の水を別の用途のために溜めておくことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ガスの運動エネルギーを増大し、このエネルギーから電気や機械的エネルギーを発生するための方法及び装置に関する。
【背景技術】
【0002】
今日、風の強い地域では、風力タービンが非常に一般的である。これらの風力タービンの設計は、航空機のプロペラと似ている。これらの風力タービンは、自然の風と向き合うように、高いタワーに取り付けられる。自然の風は風力タービンを回転し、この回転により発電機を駆動し、電気を発生する。プロペラの回転を開始するために約4m/sの最小風速を必要とする。発電機が発生した電気は、タービンの所有者が使用するか或いは電気グリッドに伝達される。
【0003】
このような製品についての良好な例は、この分野での主導的製造者が製造している。以下のデータは、2MWを発生する機械についてのデータである。
直径 80m
作動面積 5027m2
ブレードの数 3枚
タワーのデータ
ハブ高(概略) 60−67−78−100m
作動データ
作動風速 4m/s
公称風速 15m/s
停止風速 25m/s(この機械の作動可能な最大速度)
発電機
公称出力 2000kW
重量
タワー 110t
ナセル 61t
ロータ(プロペラ) 34t
総重量 205t
注:タワーが高いと重量が増大する。
【0004】
この大型の機械の公称出力は、15m/sの公称風速で2MWである。
【0005】
風力タービンのプロペラが回転するとき、プロペラの先端が描く円内を流れる空気の部分だけが任意のプロペラブレードの十分近くを実際に流れ、ブレードに作用する空力学的揚力を発生する。これらの揚力(実際には、これらの揚力の、プロペラの回転平面内の、ブレードセグメントが描く円に対して接線方向の成分)は、プロペラブレードに沿って分配され、プロペラ軸線を中心として回転モーメントを発生する。この揚力にプロペラの回転軸線からの夫々の距離を乗じ、これを所定量のトルクに合わせて蓄積する。これがプロペラブレードを回転する。プロペラブレード間を大量の空気が流れるため、この空気はプロペラに揚力もトルクも及ぼさない。こうしたプロペラが、プロペラの円を横切る空気の運動エネルギーの約20%しか使用しないのはこうした理由による。従って、低い風速で十分な動力を発生するためには、非常に大型のプロペラが必要とされる。
【0006】
効率が低いため、これらの風力タービンは大量の電力を発生するためには大型化しなければならない。従って、こうした風力タービンは、大型で重量があり且つ高価であり、動くブレードは鳥類及び航空機にとって危険である。従って、これらの風力タービンは、電力に対する要求が大きい都市のビルディングには設置されない。
【0007】
風力発電は、多くの理由により、非常に望ましい。これはクリーンで汚染のないエネルギー源であり、CO2を発生せず、風は無料であり、従って、安価なクリーンエネルギー源であるが、多くの場合、風はこうした大型のプロペラを作動するには弱すぎる。
【発明の概要】
【発明が解決しようとする課題】
【0008】
従って、更に効率的でコンパクトで製造費が低く都市のビルディングの屋根に設置できる風力タービンを提供するのが望ましい。
【0009】
これらの風力タービンの別の固有の問題点は、これらが強い風での作動が制限されるということである。これは、プロペラブレードが重く、約11tに及び、かくして高い回転速度での遠心力が膨大なものとなり、これらのブレードを25m/s以上の風に対して設計することを経済的に正当化できないためである。
【課題を解決するための手段】
【0010】
本発明によれば、ガスの内部エネルギーを運動エネルギーに変換し、ガスの運動エネルギーを機械的エネルギーに変換し、これを電気エネルギーに変換する方法及びシステムが提供される。
【0011】
本発明の主な特徴は、来入風に向いた収束ノズルを使用することである。ノズルの断面積は下流に向かって減少し、そのため空気速度が上昇する。即ち空気の内部エネルギーが運動エネルギーに変換される。
【0012】
本発明の別の特徴は、収束ノズルの出口に配置した空気タービンと組み合わせることである。これにより、ノズルを出る空気が空気タービンを駆動する。
【0013】
本発明の更に別の特徴は、駆動タービンの回転により発電機を駆動し、これにより、回転動力から電気を発生することである。
【0014】
本発明の別の特徴は、タービンのロータの回転軸線が、空気流の方向に対して垂直であるということである。
【0015】
本発明の更に別の特徴は、ノズル内の空気流の方向を定めるガイドベーンをタービンの収束ノズルに組み込むことである。
【0016】
本発明の更に別の特徴は、タービンブレードが、ノズルスロートの形状及び大きさを備えているということである。
【0017】
本発明の更に別の特徴は、ノズル入口の断面が可変であるということである。
【0018】
本発明の更に別の特徴は、ノズルスロートのところでの空気速度を監視し、スロートのところで、音速を超えることなく、最大空気速度を得るためにノズル入口面積を変化することである。
【0019】
本発明の更に別の特徴は、追加の空気が漏れ出すことができるように、ノズルスロートの開口部を開閉する制御システムを組み込むことである。
【0020】
本発明の更に別の特徴は、加速した空気の温度が、自然の風の温度と比較して低下することである。
【0021】
本発明の更に別の特徴は、空気をノズルから吸い込み、ノズル内での静圧の上昇を防ぎ、ノズルを通る定常流を発生するため、一分以内にタービンを回転する始動プロセスである。
【0022】
本発明の更に別の特徴は、ノズル入口を来入風に向かって差し向ける自動制御システムを組み込むことである。
【0023】
本発明の更に別の特徴は、矩形のノズル入口である。
【0024】
本発明の更に別の特徴は、収束ノズルをそのタービンから分離し、ノズル出口を空気タービンにパイプで連結し、このパイプが、ノズルからの加速された空気をタービン入口に伝達することである。
【0025】
本発明の更に別の特徴は、収束ノズルとともにインパルスタービンを使用することである。
【0026】
本発明の更に別の特徴は、タービンノズルに進入する空気流及び雲内の水蒸気から水を発生することである。
【0027】
本発明の更に別の特徴は、ノズル内の空気をマッハ=1.0まで加速するため、収束−発散ノズルのスロートを変化する制御システムである。
【0028】
本発明の更に別の特徴は、ノズルを保持し、風に向かって回転しないようにする停止機構を組み込むことである。
【0029】
本発明の更に別の特徴は、水がノズルやロータチャンバ内に溜まらないようにする水ドレンシステムを組み込むことである。
【0030】
本発明の更に別の特徴は、可変ノズルスロート断面積である。
【0031】
本発明の更に別の特徴は、ノズルを出る空気流中に空気流タービンを配置することである。
【0032】
本発明の更に別の特徴は、風力タービンの重心の真上に取り付けられた吊り下げ用フックを使用することである。
【0033】
本発明の更に別の特徴は、タービンユニットを収束−発散ノズルのスロートに挿入することである。
【0034】
本発明の更に別の特徴は、タービンが、ノズル入口の前方で、その垂直回転軸線を中心として風と向き合うように整合していることである。
【0035】
本発明の更に別の特徴は、空気をノズルに押し込む動力ファンが設けられた収束ノズルにより、ノズルが空気の内部エネルギーを運動エネルギーに変換し、この運動エネルギーがタービンを駆動して動力ファンによって加えられたよりも多くの動力を発生することである。
【0036】
本発明の更に別の特徴は、動力ファンが設けられた収束ノズル、及び前記動力ファンにエネルギーを提供するタービンであり、この組み合わせは、航空機を駆動するターボプロップエンジンである。
【0037】
本発明の更に別の特徴は、動力ファンが設けられた収束ノズル、及び前記動力ファンを機械的に駆動するタービンであり、この組み合わせは、航空機を駆動するターボプロップエンジンである。
【0038】
本発明の更に別の特徴は、動力ファンが設けられた内収束ノズル、前記動力ファンにエネルギーを提供するタービン、及び別のノズルに空気を押し込む追加のファンであり、この組み合わせは、航空機を駆動するターボプロップエンジンである。
【0039】
本発明の更に別の特徴は、動力ファンが設けられた形状が可変の内収束ノズル、及び前記動力ファンにエネルギーを提供するタービン、及び形状が可変の別のノズルに空気を押し込む追加のファンであり、この組み合わせは、航空機19、20を駆動するターボプロップエンジンである。
【0040】
本発明の更に別の特徴は、動力ファンが設けられた形状が可変の内収束ノズル、及び前記動力ファンにエネルギーを提供するタービン、及び流れ方向を変化する形状が可変の別のノズルに空気を押し込む追加のファンであり、この組み合わせは、航空機を駆動する、推力逆転装置を備えたターボプロップエンジンである。
【0041】
本発明の更に別の特徴は、空気流のエネルギー及び温度を上昇し、かくして質量流量を増大し、タービン内で音速を発生し、タービンのエネルギー発生量を増大するため、前記ターボプロップエンジンの収束ノズルに燃料噴射装置を組み込むことである。
【0042】
本発明の更に別の特徴は、自然の風とは別個に空気の内部エネルギーから電気を発生する装置である。この装置は、装置の始動に使用される第1動力ファンが設けられた収束ノズルと、空気の運動エネルギーを機械的エネルギーに変換するタービンと、を有し、第1タービン、第2動力ファン、及び電気を発生する発電機を駆動する。
【0043】
本発明は、以下の詳細な説明を添付図面を参照して読むことにより、更に良く理解されるであろう。
【図面の簡単な説明】
【0044】
【図1】図1は、円形の入口を持つ収束ノズルを備えた本発明の一実施形態による風力タービンの側断面図である。
【図2】図2は、図1の風力タービンの正面図である。
【図3】図3は、図1の風力タービンの平断面図である。
【図4】図4は、矩形の入口を持つ、本発明の別の実施形態による風力タービンの側断面図である。
【図5】図5は、図4の風力タービンの正面図である。
【図6】図6は、図4の風力タービンの平断面図である。
【図7】図7は、入口断面積が可変の、本発明の別の実施形態による風力タービンの側断面図である。
【図8】図8は、図7の風力タービンの正面図である。
【図9】図9は、図7の風力タービンの平断面図である。
【図10】図10は、ガイドベーンを持つ、翼状のロータ及びステータを備えた、本発明の別の実施形態による風力タービンの側断面図である。
【図11】図11は、図10の風力タービンの正面図である。
【図12】図12は、軸線方向インパルスタービンを持つ、本発明の別の実施形態による風力タービンの断面図である。
【図13】図13は、図12の空気タービンのタービンシャフト、支持アーム、ステータディスク、及びロータディスクを示す断面図である。
【図14】図14は、図12のステータディスク及びロータディスクの平面図である。
【図15】図15は、ノズルを空気タービンから分離した、本発明の別の実施形態による風力タービンの側断面図である。
【図16】図16は、収束−発散ノズルをタービンから分離した、本発明の別の実施形態による風力タービンの側断面図である。
【図17】図17は、垂直回転軸線が収束ノズルの前方にある、本発明の別の実施形態による風力タービンの側断面図である。
【図18】図18は、動力ファンを備えたノズルの側断面図である。
【図19】図19は、動力ファン及びタービンを備えており、航空機用ターボプロップエンジンを形成するノズルの側断面図である。
【図20】図20は、動力ファン及びタービンを備えており、航空機用2段ターボプロップエンジンを形成するノズルの側断面図である。
【図21】図21は、動力ファン、タービン、及び推力逆転装置を備えており、航空機用2段ターボプロップエンジンを形成するノズルの側断面図である。
【図22】図22は、動力ファン及びタービンを備えており、2段ターボ発電機を形成するノズルの側断面図である。
【発明を実施するための形態】
【0045】
今日の風力タービンは、空気流、即ち風で駆動されるプロペラを備えている。風が強くなるに従って、プロペラブレードを駆動するための更に多くの運動エネルギーを利用できるが、プロペラブレードが大きく且つ重量がある(ブレード一枚当たり約11000kg)ため、風速が特定のレベルを越えると、ブレードが遠心力で壊れることがないようにするため、ブレードの強度及びシャフトへのその取り付け強度に従って回転を停止しなければならない。かくして、空気タービンはその仕事を停止し、多くの風力エネルギーが無駄になる。他方、風が弱過ぎ、約4m/s又はそれよりも弱い場合には、大型のプロペラでも作動しない。これは、利用可能な運動エネルギーが、大型の空気タービンを回転させるには弱すぎるためである。本発明は、こうした問題点を解決し、本発明が、空気タービンをどれ程コンパクトにできるか、及び弱い風並びに高速の風でどのようにして比較的多くの電気を発生するのかを説明する。
【0046】
更に、ノズル入口に流入する空気流を発生する動力ファンを設置することには価値がある。これは、収束−発散ノズルが、空気流の運動エネルギーをそのスロートのところで約10倍に増大できるためである。かくして正味動力出力は動力入力よりも大きく、風に左右されないエンジンを得る。空気を吸い込んで空気流を収束ノズル又は収束−発散ノズルに押し込む動力ファンが、本発明の主要な特徴である。
【0047】
風の運動エネルギーは、以下の式によって数学的に表現できる。
【数1】

ここで、Vは空気の速度であり、
ρは空気の密度であり、
Aは空気流の断面積であり、
”×”は掛け算の記号であり、後に省略される。
【0048】
従って、空気の速度がゼロであれば、発生する運動エネルギーはゼロである。
【0049】
(注:本特許出願の全ての式及び使用したデータは、下記の参考図書から引用した。)
「空気力学の基礎(Foundations of Aerodynamics)(第二版)」A.M.クーセ及びJ.D.シェッツアー著
ミシガン大学(米国)航空工学科
出版社:ジョン ウィリー アンド サンズ社
米国国会図書館出版目録カード番号:59−14122
【0050】
驚くべきことに、自然の風の空気は、たとえ凍結温度でも、その運動エネルギーと比較して大量のエネルギー(「内部」エネルギーと呼ぶ)を持っている。
【0051】
この状態を理解するため、単位質量についての等エントロピー圧縮流のエネルギー方程式を参照しなければならない。
【数2】
(上記方程式については、参考図書の第140頁の方程式24を参照されたい。)
【0052】
風について論じているため、上記方程式中の全ての関連したパラメータは、以下の特定の条件の空気に関する。
Cpは、空気の定圧比熱である。上記参考図書の第132頁を参照されたい。
Cvは、空気の定積比熱である。上記参考図書の第131頁を参照されたい。
γ=1.4は、1000 oR(ランキン温度)の空気についてのCp/Cvの比である。
Tは、空気の絶対温度である。
Vは、空気の速度である。
【0053】
Cp×Tは、ガス(空気)の内部エネルギーであり、この際、V2 /2は、単位質量のガスの運動エネルギーである。等エントロピー流れ(空気に熱が加えられも奪われもしない流れ)については、式2即ち方程式24によって与えられたエネルギー関係を満たさなければならない。即ち、エネルギー保存則が存在する。
【0054】
運動エネルギーと内部エネルギーとの間の比を示すため、これらのエネルギーを、比較的強い25m/s(V80型2MW(メガワット)風力タービンの作動可能な最大風速)の、温度T=32 oF(0℃)の風について計算する。これは、このような空気タービンが普及している北半球で冬季に一般的な非常に低温の空気である。
英国の単位系を使用すると、
Cp=6000ft×lb/slug oR
T=460+32=492 oR
V=25/0.3048=82.02ft/s
内部エネルギーは、CpT=6000×492=2952000ft×lb/slugであり、
運動エネルギーは、V2 /2=(82.02)2 /2=3201.6ft×lb/slugである。
【0055】
従って、空気の運動エネルギーの、空気の内部エネルギーに対する比は、この場合、
3201.6/2952000=0.00108である。即ち、運動エネルギーは、空気の内部エネルギーの約1/1000である。これは、高性能の2MW空気タービンについての作動可能な最大風速についてである。風が弱いと、エネルギー比は更に小さくなる。
【0056】
穏やかな風(10m/sよりも小さい)では運動エネルギーが小さいため、この種の風力タービンによって集められるエネルギーの量を増大するには、大面積のロータブレードが必要となる。ロータブレードが大きくなればなる程、V80等の機械全体が大型になり且つ高価になり、その結果、高価な電気を発生することになる。
【0057】
従って、空気の内部エネルギー源を利用する方法を案出する者が誰もいなかったということは驚くべきことである。本発明は、空気の内部エネルギーを運動エネルギーに変換し、次いで新規なタービン設計によって機械的エネルギーに変換する。
【0058】
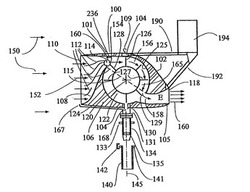
図1は、本発明の一実施形態の概略断面図である。ポッド100が、ブレード126、127、128、等を備えた円筒形ロータ122を収容している。これらのブレードは、平らな又は凹状の矩形の平面形態であってもよいし、任意の他の平面形態であってもよい。かくして、風150がノズル入口110に進入してノズル108内を152として流れるとき、ノズルの断面積が最小のノズルスロート114まで収斂し、ここで空気がその最大風速に達する。空気流154は、スロート114の直後に「持ち上がってきた」ブレード128及び空気流154に対して瞬間的に垂直なブレード126に当たる。ブレード126は、空気流154によって押されて右方に移動する、即ち駆動空気流154に対して垂直なロータの回転軸線120を中心として時計廻り方向に回転する。ブレード126、127、128、等が同様にロータシリンダ122にしっかりと取り付けられているため、ロータ122は、そのブレード126、127、128、等とともに時計廻り方向に回転する。ロータブレード126、127、128、等の縁部とシリンダチャンバの壁124、125との間の距離は小さく(数mm)、かくして空気流154、156はこれらのブレードを迂回できず、チャンネル162の内部を流れて開口部129に達するまで、これらのブレードを押して回転する。空気流158は、開口部129のところで、参照符号「E」を付した排気ノズルを通ってロータチャンバを離れ、タービン断面118を流れ160として離れる。ロータブレード126からロータブレード129までの空気流の経路は、空気流がロータブレードに連続した空力学的力を及ぼす時間距離を提供する。ブレードの数を二枚まで減らすと、かくしてこの空気タービンの製造費を低減し、最終的にはこの設計によって発生される電気の費用を低減する。しかしながら、滑らかな作動を維持するためには、即ちロータ122に一定の空力学的トルクを及ぼすためには、四枚乃至八枚のブレードを使用しなければならない。この設計が本発明の主要な特徴である。
【0059】
ポッド100は、自由空気中に屹立した垂直ウィング194を備えている。かくして垂直ウィング194と整合していない風がウィングに空力学的力を及ぼし、この力により、ポッド100を、取り付けコラム134に通したその垂直軸線145を中心として、ポッドの入口110が来入風150に面するように回転する。
【0060】
ポッドコラム134は、ストップ133及び導入コーン135を備えている。これらは、両方とも、ポッドコラム134にしっかりと取り付けられており、コラム134をパイプ140内に整合するのを補助する。パイプ140は、作動のため、即ち風で電気を発生するためにポッド100が取り付けられるタワーである。コラム134をパイプ140に挿入した後、ストップ133がその対応する部品141に当たったとき、パイプ140内へのコラム134の下方への移動を停止する。ストップ133及び対応部品141は、両方とも、同じ平らな形状、好ましくは円形の平面形態を有する。ストップ133が対応部品141に載止したとき、C字形断面形状を持つロック142を下側の部品141にしっかりと(好ましくはボルトによって)設置し、ストップ133及びポッド100全体を、軸線145を中心として、来入風に向かって回転させることができるが、上方に動かないようにし、かくしてタービンポッドをその支持コラム140上に設置された状態に保持する。ポッドをパイプ140に取り付けるシステム130が本発明の別の特徴である。
【0061】
フック109がポッドの対称平面に、重心の上方に正確に取り付けられている。かくして、クレーンでポッド100をコラム140に設置するとき、コラム134は水平方向に対して垂直であり、コラム140と平行であり、かくしてコーン135をコラム140の開放した頂部と容易に整合させることができ、タービンをその作動位置に容易に設置できる。このフック及びその位置が本発明の別の特徴である。スロートのところでのマッハ数(M)が1.0を越える、即ち音速を発生する極めて高速の風用に随意の追加の空気通路を設ける。このような場合には、ノズル108に設けられた、風速計測装置を組み込んだ随意の制御システムがこの空気通路を開放し、余分の空気流を、ノズルから、スロート区分114のところで、騒音やがたを生じるM=1.0を越えることなく、この通路を通して出す。
【0062】
本発明の空気タービンは、比較的ぴったりとした容器内で作動するため、ノズル又はロータチャンバ内に溜まった雨水を除去するために水ドレンシステムを必要とする。更に、ノズルに進入する空気が低温である(下文に示す数値例を参照されたい)ため、水蒸気が液化して水になってしまう。水を空気タービンからドレンするため、水コレクタ167を追加する。この水コレクタ167は、収束ノズルから水を集め、これをパイプ131に移送する。更に、ドレン穴及びパイプ168がロータチャンバから水を集める。乾燥した地域では、この水を何らかの用途に当てることができる。これは、こうした水が清浄な飲用水であるためである。雲が存在する地域、即ち山や高いタワーの頂部にタービンを配置した場合には、大量の水を発生でき、こうした水を、後に使用するために蓄える。水収集−ドレンシステムは、本発明の別の実施形態である。
【0063】
図1のロータ設計は、チャンバ壁とブレードの縁部との間の距離が約1mm又は2mmであるために空気流がブレードを迂回できないため、高い効率をもたらす。この際、ブレードの翼幅又は弦は、約30cm又はそれ以上である。この形状により、空気流はブレードを迂回できず、ブレードを押さなければならず、その結果、ブレードの速度を空気流の速度にすることによって、空気の運動エネルギーの大部分がブレードに伝達される。ブレードは、簡単な平らな薄板金又は他の材料であってもよく、かくしてこのブレードの製造費を引き下げる。他方、凹状のブレードは、空力学的効率並びに構造的強度を更に向上する。かくして図1のブレードは、凹状設計であってもよい。この設計のロータブレードは、プロペラを使用する空気タービンと比べるとかなり小さい。空力学的に効率的なプロペラの翼幅は、プロペラの弦の少なくとも約10倍の長さを備えていなければならない。かくして、2MWの機械について、各ブレードの長さは40mであり、重量は約11tにのぼる!このブレードは、その回転時にかなりの遠心力を発生し、これによりブレードがそのシャフトから破断してしまう場合がある。これは、以下の式で表される遠心力がブレードに作用するためである。
【数3】
ここで、ωは、回転速度であり、
Rは、プロペラブレードの質量要素の局所的半径であり、
dmは、プロペラブレードの微分質量要素である。
【0064】
ブレードの回転速度が上昇するに従って、ブレードのシャフトに作用する更に大きな遠心力を発生する。このため、プロペラをベースとした空気タービンは、高速の風で停止しなければならないのである。本発明では、ブレードの翼幅が短く、ブレードの質量が小さく、かくしてロータアッセンブリ全体が小型で軽量であるため、ロータ及びロータブレードに作用する遠心力はプロペラ型風力タービンよりも遥かに小さい。従って、本願の実施形態は、ロータ構造を高度に強化する必要なしに、遥かに高い速度で回転できる。
【0065】
従って、ロータの重量が小さいため、ロータの慣性回転モーメントが低く、これにより、空気流によって回転を開始するのが現在の風タービンよりも遥かに容易である。
【0066】
ロータの回転速度は、高い出力電力を得る上で重要な要因である。これは、電力が、力に速度を直接乗じた値に等しい、即ちP=F×Vであるためである。
【0067】
更に、この実施形態では、ロータブレードに作用する空力学的力は、「揚力」及び「抗力」の組み合わせである。この実施形態では、ブレードに対して垂直な空力学的力の組み合わせ効果に関心があるため、失速という用語には意味がない。従って、揚力及び抗力は、ブレードの主面に対して垂直な力を増大するという同じ目的で役立ち、力のこの組み合わせにより、力を更に安定させる。従って、このロータの実施形態に関し、空力学的力を抗力と考える。この実施形態についての抗力係数は、正方形のブレードに通常の流れがぶつかる場合には、1.0乃至2.0である。かくして空力学的抗力に基づく設計が本発明の別の特徴である。
【0068】
航空機の翼並びにプロペラブレードでは、翼は、NACA65シリーズ等の翼輪郭から幾何学的に形成される。各翼輪郭は、前縁及び後縁を結ぶ線と定義される弦を有する。この実施形態では、翼は、ブレードが輪郭領域全体に亘ってハブに連結されたプロペラブレードやターボジェットの軸流タービンとは異なり、その輪郭の後縁領域によってロータハブに取り付けられている。かくして、軽量のロータブレードが輪郭の後縁領域に亘ってハブに連結されており、閉鎖チャンバ内の空気流路に沿って空気流に従って移動するロータ設計は、本発明の別の特徴である。
【0069】
収束ノズル108が本発明の主要な特徴である。ノズルの断面積は、スロート114に向かって徐々に減少し、スロート114のところでノズルの断面積が最小になり、かくして空気流152を強制的に加速し、即ち空気の内部エネルギーを運動エネルギーに変換する。
【0070】
乱流による運動エネルギーの損失を最小にするため、及びノズル内の静圧が上昇しないようにするため、入口108にはガイドベーン112が設けられている。これらのガイドベーン112は、空気流を互いに「平行」な流線をなして全体にノズル壁の方向に強制的に流す、平らで薄いエレメント(金属、プラスチック、又はカーボンファイバやガラスファイバ等の複合材料で形成されている)である。その結果、ガイドベーンを離れる空気流は、スロート114に向かって同じ速度で、互いに混じり合うことなくできるだけ滑らかに、スロート114のところでのノズル壁と平行に且つロータブレード126に対して垂直に流れる。矢印154がこの流れを示す。ノズル内での乱流及び静圧の上昇を抑えるガイドベーンを組み込んだ収束ノズル設計が、本発明の別の特徴である。
【0071】
スロート114の断面積が入口断面110の約1/10であるため、空気流の速度150を自然の風と比較して約10倍に上昇すると同時に、その運動エネルギーが約100倍増大する。ノズルの長さ及び形状は、効率と重量との間の配慮の交換条件である。これは、ノズルが長ければ長い程、乱流及び圧力上昇を阻止する上で優れているためである。乱流及び圧力上昇を阻止することは、等エントロピー流れを得る上で、及びできるだけ大量の空気を移送すると同時に入口での漏れを最少にする上で重要である。空気流の内部エネルギーを運動エネルギーに変換する収束ノズルは、本発明の主要な特徴である。
【0072】
運動エネルギーのこの高いゲインを提供するため、入口からスロートまでのノズルに沿った空気のパラメータを計算する。
入口断面110での空気流のパラメータ:
A1=10m2 、110での断面積、
V1=21.737ft/s、110での風速(この値は、後の数値計算を容易にするために選択した値であるということに着目されたい。)
ρ1=0.002378slug/ft3 、110での空気の密度(海面の高さでの標準大気の圧力の値)、
T1=32 oF、110での空気の温度(冬季の平均的な気温)。
【0073】
空気流がタービンブレード128及び126に当たる、スロート114での同じパラメータを知る必要がある。即ち、
A2=1m2 、110での断面積(設計によって与えられる)、
V2=?、114での風速、
ρ2=?、114での空気の密度、
T2=110での空気の温度、
γ=1.4、1000 oRの空気についてのCp/Cvの比。
【0074】
解:以下の方程式を使用する。
1)
【数4】
区分114ではT、Vは未知数である。
エネルギー保存;参考図書の第140頁の方程式24、即ち本願の式2を参照されたい。
2)
【数5】
区分114ではT、p、ρは未知数である。
理想気体の状態方程式;参考図書の第130頁の方程式2を参照されたい。
3)
【数6】
区分114ではρ、Vは未知数である。
連続性の方程式;参考図書の第155頁の方程式22を参照されたい。
4)
【数7】
区分114ではT、ρは未知数である。
断熱可逆流れ;参考図書の第142頁の方程式29を参照されたい。
(区分114でのTo及びρoは、断熱流れについて、区分110での値と同じであり、方程式1及び4を使用して所与のパラメータで計算できる。)
【0075】
区分114での空気流のパラメータである四つの未知数V、T、p、及びρがある。この方程式の組を解くには、最終的に試行錯誤の方法を必要とする。これは、4番目の方程式即ち上記式7のためである。参考図書の第152頁乃至第159頁には別の式が記載されている。空気流の速度Vの代わりにマッハ数の定義を使用して一般解が説明されている。これらの解は、参考図書の第153頁の第4図及びこの参考図書の表2に示されている。
【表1】
【0076】
参考図書での議論は、「ラバル管」と名付けられた収束−発散ノズルについて続けられる。第156頁乃至第159頁を参照されたい。ここでは、解は、局所的マッハ数=1.0のクリティカル領域A* の定義を使用して与えられる(第157頁L.2参照)。流れパラメータは、第157頁の方程式26及び27、及び第158頁の図7及び図8で与えられる。項A* /Aは空気流のパラメータを計算する上で非常に助けとなる。これは、表2に含まれる。
【0077】
収束ノズルにおける流れパラメータの解法は、以下の方法に従って行われる。
【0078】
ステップ1:区分110について特定されたマッハ数について、比A* /Aを計算する。空気流がマッハ1.0、即ち音速に達する場所の収束ノズルの断面積A* を計算する。音速がTの関数であることに着目されたい。
【数8】
従って、区分110でのマッハ数を計算する。
区分110での音速は、
【数9】
区分110でのマッハ数は、M=V/a=21.737/1086.87=0.02である。
この値について、表2では、
A* /A]S110=0.03455
∴ A* /10=0.03455
∴ A* =0.3455m2 を得る。
【0079】
ステップ2:区分114でのマッハ数を計算する。
A* がわかっており、A]S114=1.0m2 である場合には、区分114についてのA* /Aは、A* /A=0.3455/1.0である。この値は、表2において、M=.0205、即ちM=0.2とM=0.21との間の値である。
(注:To は、区分110について、上掲の方程式1から直接計算される。)
T/To =0.9921
T]S114=To ×0.9921=492.03937×0.9921=488.15 oR∴T]S114=488.15 oR
このことは、区分114の空気は、ノズル入口110に進入する空気(492 oR)よりも低温であるということを意味する。この空気流の温度低下は、本発明の重要な特徴である。これは、本発明による収束ノズルが吸い込んだ雲から水を得るのに使用できるためである。
【0080】
ステップ3:区分114での音速を計算する。
【数10】
【0081】
ステップ4:区分114での空気流の速度を計算する。
【数11】
【0082】
かくして、スロート114での空気の速度は、221.9ft/sである。従って、
221.9/21.737=10.2
即ち、区分110での空気流の速度よりも10.2倍速い。従って、区分110と比較して104倍の運動エネルギーを持つ空気流を得る。運動エネルギーのこの大幅な増大が、本発明の主要な特徴である。ノズル内の空気流に外部からエネルギーが全く加えられないため、区分110の空気流の内部エネルギーの幾分か、即ち、
【数12】
が運動エネルギーに変換される。即ち、
【数13】
これは、本発明の主要な特徴である。
【0083】
区分114での密度、圧力、及び温度は、方程式4からρo を計算し、方程式2からpo を計算した後、M=0.205についての表の値から容易に計算できるということに着目されたい。
【0084】
収束ノズルについての以上の計算は、「断面又は平行な流線間の変化率が小さい」ということに基づくということに着目されたい。参考図書の第154頁を参照されたい。従って、理想的なノズルからの幾らかの逸脱により、ノズルが、「断面の変化率が小さい」状態から外れ、大きくなる場合が予想される。しかしながら、全ての場合において、ρVA=一定という連続性の方程式に従う。この方程式は、空気流がノズルに進入した後の定常状態の空気流の加速を述べており、区分110では、定常状態の速度を有する。
【0085】
これは、エネルギーの方程式24を使用してチェックできる。
【数14】
【0086】
数値間に僅かな相違があるけれども、これらの間の比は0.99956であり、これは、表に示すパラメータの数値を丸めたパラメータを使用し、マッハ数について内挿を使用することによる不正確性に留意すると、工業的目的について優れた精度である。
【数15】
【0087】
かくして、Tの差は、約0.2 oRであり、これは無視できる誤差である。
【0088】
かくして、面積比が1/10の収束ノズルを使用すると、21.737ft/sの自然の風速は、221.9ft/sに上昇し、単位質量当たりの自然の風の運動エネルギーは、21.7372 /2=236.25から、221.92 /2=24619.8に増大する。この運動エネルギーの増大は空気の温度の低下によるものであり、104倍である。内部エネルギーの運動エネルギーへのこの変換は、本発明の主要な特徴である。この収束ノズルを使用することにより、入口の1/10の小さな面積に集中する高速の空気流が得られ、収束ノズルによって空気流が拘束されるため、必要とされるタービンブレードは小型で軽量であり、空気の運動エネルギーを機械的エネルギーに変換する上で遥かに効率的である。
【0089】
図1は、これを達成する一つの実施形態を示す。入口断面からスロート断面114までのノズルの長さは、ノズルの重量を低減するため、及び台風のときでも立っており且つ作動できるように所与の質量構造についてのノズルの剛性を向上するため、できるだけ短くなければならない。しかしながら、収束ノズルは、等エントロピー流を確保し且つ入口での漏れを最少にする上で十分に長くなければならない。これらの相反する必要条件を満たすため、ガイドベーンを使用する。ガイドベーン112は、ノズル108を四つの独立した先細の副ノズルに分割する。各副ノズルの入口−出口面積比は、乱流の発生を阻止するため、各副ノズルから出る流れの速度が等しいように、1/10である。各副ノズルは、主ノズルよりも遥かに狭幅であるということに着目されたい。副ノズルの所望の数は選択事項である。これは、副ノズルを追加すると、抗力、重量、複雑さ、及び費用が大きくなるためである。これらは全て、望ましからぬことである。ノズル、特に短い収束ノズルでガイドベーンを使用することは、本発明の別の重要な特徴である。
【0090】
本発明を効率的にするため、収束ノズルの内部の静空気圧が、上流、即ち入口110での静圧よりも低くなければならないということに着目されるべきである。これは、空気を、収束ノズルを通して等エントロピー流をなして加速する場合である。発電機に連結されたタービンがスロートのところに、又はスロートの僅かに後方に配置されるため、タービンは、特に高出力発電機の場合、流れに対して空力学的抵抗を発生する。この始動時の問題点を解決するため、空気をノズルから吸い込み、定常状態の空気流をノズル内に発生するのを補助するタービンの初期回転速度を与えるため、随意の「始動」手順を使用できる。発電機が電動モータとして作用し、これに連結されたタービンを回転するように、発電機を外部電源に接続する。この始動プロセスは、風が存在する場合に行わなければならない。このような外部電源は、バッテリー又は電気グリッドである。発電機は、風力タービンが電気を発生しているときにこのバッテリーを充電し、バッテリーは、始動時に電流を提供する。始動プロセスに要する時間は短く、約1分程度であり、次いで、始動プロセスを停止し、定常状態の空気流の空気がタービンブレードをそれ自体の力で駆動できるようにする。この始動プロセスは、本発明の別の特徴である。
【0091】
始動手順を開始するため、多くの構成を形成できる。例えば、風力タービンに設置された動作センサが電気信号を発生し、この信号を、バッテリーによって電力が提供された増幅器回路で増幅し、リレーを切り換え、これによりバッテリーを発電機にタイマーを介して接続する。タイマーは、電流をモータ/発電機に伝達し、所定の数秒が経過した後、モータへの電力を切る。
【0092】
別の構成は、何らかの空気流を実際に感知するため、ノズル内部又は外部にピトー管を組み込むことである。ピトー管に進入する空気流によるピトー管内部の圧力上昇を、アナログ又はデジタルの電気信号に変換し、この信号がシステム230に到達し、制御システムをトリガーし、空気流タービンのロータに連結された電動モータにバッテリーの端子を接続することによって、スターターシステムを作動する。タービンの始動後、制御システムは、少なくとも5分又はそれ以上に亘って別の始動を開始することができない。これは、始動プロセスで空気タービンが発生する空気流でなく、自然の風だけで始動を開始できるようにするためである。制御システムは、CPU(中央演算処理ユニット)、及びコンピュータプログラムを記憶したメモリー装置に基づくシステムである。このコンピュータプログラムは、風力タービンの状態を監視し、ピトー管からの最少自然風速データの有無に応じて始動プロセスを開始する時期を「決定」するプログラムである。更に、表2のデータ並びに大気のデータをメモリー装置に記憶できる。このデータは、追加の空気通路161を制御する上で必要である。図3に関する追加の詳細、又は本発明の他の実施形態の他の特徴を参照されたい。タービンを始動するため、所定の時期に又は所定の時間間隔でタービンの回転を開始する予めプログラムしたタイマー、遠隔制御装置からの作動指令、又は場合によっては人間の手による指令等の他の方法を適用して電気スイッチを作動し、本発明による家庭用風力タービンを作動してもよい。
【0093】
本発明の大きな利点は、低い風速でも大量のエネルギーを発生できるということ、及び大きさがコンパクトであるということである。そのため、こうした装置は、全てのビルディングの屋根に容易に設置できる。例えば、図1による入口直径が1mの収束ノズルの電力出力を計算できる。
【0094】
風速を21.737ft/s、即ち6.6m/sと仮定する。これは非常に一般的な弱い風であり、スロート114のところで221.9ft/sの風速を発生する。速度が221.9ft/sのスロート空気流54に対して一時的に垂直なブレード126に作用する空力学的力を計算する。
【0095】
予め計算したスロートのデータを使用する。本明細書中の表2及びそれに続く記載を参照されたい。内挿した比ρ/ρo=0.9793を使用し、スロートでの空気の密度を計算する。
ρ=ρo×0.9793=0.002378×0.9793=0.0023288
【数16】
ここで、Sは、ブレード126の面積であり、CD=1.0は、ブレード126(区分114)の抗力係数である。
【0096】
タービンブレードが、空気流をノズルのスロート内にとどめるため、タービン負荷がある場合の空気流の速度と比較した、スロートでの空気流の速度低下を30%と仮定する。即ち、空気流の速度は、221.9×0.7=155.3ft/sである。
【数17】
及び電力は、
【数18】
【0097】
次に、タービン負荷がない場合の、スロートでの空気流のエネルギーを計算する。
【数19】
【0098】
従って、この風力タービンが14.5kWのうちの5kWを発生するということを示す上述の電力出力の計算は、非常に控えめであり、実際の電力出力は、7kWにのぼる。
【0099】
この5.0kWの出力電力は、西欧諸国の平均的な家庭にとって十分である。6.6m/sの軽微な風でこの出力が発生することから、更に強い風では、この数値の2倍又はそれ以上の出力が発生する。
【0100】
この風力タービンは、長さが約2.5mであるため、この大きさにより、各都市の数千もの家庭のため、このような風力タービンを、都市の全てのビルディングの屋根に設置できる。本発明を採用すると、国の大量の電気を節約でき、汚染が減少し、多くの家庭が彼等自身で電力を発生することにより、生活費を減少する方法を提供する。当然のことながら、風速が高いと、このような風力タービンの所有者は、地方の電力会社に電気を販売できる。
【0101】
図2は、図1の空気タービンの正面図を示す。参照番号を付した全てのエレメントは、図1におけるのと同じ参照番号を備えている。この図は、全ての流れを取り扱うため、ガイドベーン112がノズルの幅に亘って延びていることを示す。ガイドベーン112の翼幅は、図3に明らかに示してある。ガイドベーンの寸法は、空気を加熱することになる運動エネルギーの損失を最少にするように定められる。横方向乱流による乱流作用をなくすため、垂直ガイドベーン(この図には示さず)を追加してもよい。
【0102】
図3は、図1の空気タービンの平断面図である。参照番号を付した全てのエレメントには、図1に示してないものを除くと、図1におけるのと同じ参照番号が付してある。ロータの主シャフト120は、そのブレード127(図面を読み易くするため、残りのブレードは示してない)に及ぼされた空力学的力により回転する。シャフト120はプーリ170を有し、このプーリは駆動ベルト173と係合し、このベルトがプーリ170よりも小径のプーリ171を回転し、かくして、プーリ171は、発電機175を駆動するのに十分に高い回転速度で回転し、この発電機が機械的エネルギーを電気エネルギーに変換する。電流の形態の電気エネルギーは、電線(図示せず)によって発電機の外に伝達される。
【0103】
随意の追加の空気排出システム160−163の役割は、風速が最大300km/時に及ぶ台風に対し、この設計が対処することである。台風の空気の速度を10倍にすると、マッハ=1.0を越えてしまう。ノズル内で衝撃波が発生しないようにするため、空気通路160を開放し、かくしてスロートの面積を増大し、これによってスロート114での空気の速度を低下し、マッハ=1.0以下に保つ。余分の空気通路を組み込むことが、本発明の別の特徴である。スロートでのよどみ圧を計測するピトー管等の風速計測装置236と一体化した制御システム230及びアナログ−デジタルコンバータ(図示せず)が、この圧力を電気信号に変換し、この信号がライン238を通って制御システムのCPUに提供される。CPUは、スロートでの空気流の速度を監視するコンピュータプログラムを作動し、この速度がM=1を越えたとき、遠隔制御式電動アクチュエータ162及びそのアーム163によって電動式ドア161を開放する。制御システムのメモリー装置に記憶された空力学的データ(参考図書の表2等)は、制御システムが本願の他の実施形態の様々な仕事を行う上で役立つ。マッハ数がマッハ=1.0に向かって上昇するとき、制御システムは電動アクチュエータ(航空機産業で一般的な装置)に電気信号を送出し、このアクチュエータが剛性アーム163を押してドア161を開け、かくしてスロートの前方の空気の幾分かを通路160を通して流出させることができ、スロートでの空気流はM=1を越えず、かくして、衝撃波、騒音、及び振動をなくす。かくして、この随意の空気通路により、この風力タービンは、破壊的自然現象から幾分かのエネルギーを利用するため、強い風で作動する。余分の空気排出システムを組み込むことが、本発明の別の特徴である。
【0104】
図4は、本発明の別の実施形態の側断面図である。この図は、入口が平面的であり、空気がロータブレードに抗力を及ぼす空気経路が長く、かくして大きな効率が得られる。図1の設計の全ての他の特徴は、ここに、及び本願の任意の他の実施形態に含まれていてもよい。図4、図5、図6でエレメントに付した参照番号は、基本的には、図1、図2、及び図3で用いたものと同じである。
【0105】
図5は、図4の空気タービンの正面図を示す。この実施形態は、平面的な空気入口を有する。これにより、入口は、大きな入口面積を持つことができると同時に、タービンロータの直径を小さくできる。これは、遠心力を小さくしておく上で重要であり、及び従って、構造を軽量にし且つ安価にする上で重要である。他方、高出力風力タービンは大きな入口を必要とし、自然の景観に大きな影響を及ぼす。しかしながら、この実施形態は、設計の高さを低くし、良好な外観を提供する。入口面積が大きいということは、更に多くの電気を発生するということを意味する。
【0106】
図6は、図4の実施形態の平面図である。この実施形態では、ロータブレード127の翼幅は、図1又は図4でわかるように、ブレードの半径、即ち弦−ブレードの長さの約5倍乃至10倍大きい。
【0107】
図7は、本発明の別の実施形態である。この実施形態は、ロータ設計が図1及び図4と同様であるが、ノズルの断面積が可変である。入口が可変であることによる利点は、空気流がスロート114のところでマッハ=1に達しないようにすることにある。可変の入口は、風速が上昇するとき、流れを絞ると同時に入口に全ての大きな力を作用する。空気タービンのこの実施形態について、ロータブレードの大きさは固定されており、その最大風速はM=1.0である。従って、電力出力を最適化するため、入口の面積を風速に適合させなければならない。風速が低いと、入口面積を増大する必要があるのに対し、高速の風では入口面積を減少する。ノズルの断面を変化するため、実施形態は、2つの平らな表面を有する。これらの表面は、両方とも、ヒンジ260を有し、かくしてヒンジ260の軸線を中心として回転できる。入口断面積110を変化するため、二つの随意の機構を説明する。第1の機構は、風速が上昇するに従って、上向きの揚力が増大するウィング250である。ウィング250に作用する揚力が大きくなると、ウィングに取り付けられたアーム252がシリンダ256を中心として回転し、移動自在の平らな表面108に力を下方に及ぼし、この平らな表面108がヒンジ軸線260を中心として回転し、かくして表面108の前縁(来入風と最初に出会う線)を下方に回転し、入口断面積110を減少する。
【0108】
別の選択肢は、電子式制御システム230によってノズル面積を変化することである。この制御システムは、図1の余分の空気通路160に関して説明した。ここでは、CPUがスロート114のところでの空気流の速度を監視し、入口面積を変化し、タービンに負荷を加える空気流の速度をできるだけマッハ=1又は任意の他の設計値に維持する。電動アクチュエータ270を作動し、アーム272を左方に押し、ブラケット276を左方に押すことによって、下側の平らな表面108を押し、これによって平らな表面108をヒンジ軸線260を中心として回転し、かくして入口断面積110を減少する。入口面積を拡大するためには、アクチュエータのアーム272をそのシリンダ270内に引っ込める。図7の全ての他のエレメントには、図1におけるのと同じ参照番号が付してある。可変の入口面積及び自動制御システムが本発明の追加の特徴である。制御システムは、電話線又は無線通信のいずれかによる遠距離通信によって、遠方の制御システムから監視できるということに着目されたい。この特徴を可能にするため、セルラーモデム及びアンテナが制御システムのCPUと一体化してある。
【0109】
図8は、図7の空気タービンの正面図である。空気速度計測装置236(ピトー管)の位置に着目されたい。ピトー管は、スロート平面114の後方のチャンバの底部に配置されている。チャンバ壁は、流れ112が平行な流線を持つようにするため、平行である。
【0110】
図9は、図7の実施形態の平断面図である。垂直ガイドベーン116が示してあるチャンバ220内の流れは、平行な線をなして流れるように構成されている。
【0111】
図10は、本発明の別の実施形態のポッド100の中心線に沿った垂直平面での断面図である。上述の実施形態におけるのと同様に、収束ノズルがこの実施形態の重要な部分である。この実施形態では、ロータは約12枚のウィングを有し、これらのウィングの断面、734、736、738及び730は、図11に明瞭に示す二つの平行な回転自在の「リング」820、850間に設置されている。各ウィングの側部のチップ側縁部は、リング820、850の一方にしっかりと連結されており、かくして、ウィングが軸線880を中心として移動するとき、両リングはこれらのウィングとともに回転する。上述のロータ設計と異なり、ウィングの後縁はロータハブに取り付けられておらず、かくして、来入流は、これらのウィングに、航空機の翼と作用するのと同様に作用する。リングは、上述の実施形態におけるのと同様に、入口に進入する流れに対して垂直な図11に示す軸線880を中心として回転する。図10に示す円740は、回転リング820、850の内輪郭である。これは図11で明瞭にわかる。ガイドベーン716は、図示のように設置されており、これらのガイドベーンは、それらの側部のチップがステータリング840、846に取り付けられている。これらのガイドベーンは、回転自在のウィング734、735、736、737の後縁を離れる流れの方向を変え、リング820、850の右側のウィング、即ちウィング738、739に向かって流し、これらのウィングを時計廻り方向に更に押し、流れがロータ領域を離れる前に流れから更に多くの運動エネルギーを取り出す。ウィング736は、瞬間的に、流れ152に対して垂直である。静ガイドベーン717、718は、ノズル108の幅に亘って延びている。これらのガイドベーンは、流れ(矢印720で示す)を、最適の迎え角でウィング734に当たるように、即ち各ウィングがその瞬間的位置で回転軸線880を中心として最大のトルクを発生するように差し向ける。各ウィングのトルクは、結果的に作用する瞬間的な力と回転軸線880との間の距離を乗じた、揚力成分及び抗力成分を含む。リング820の中心で、静ガイドベーン717及び718が、ウィング736の位置での来入流152に垂直なノズル断面であるノズルのスロートを横切って延びている。スロートは、ノズル側壁によって形成される。これは、図11でわかる。実際には、これらの側壁は、右側の「リング」820及び840の平らな面及び左側の「リング」850及び846の平らな面である。スロートの上壁は、ノズル108の上壁の延長部であり、下壁は静本体718の上面である。この本体は、空気流が下側のウィング730、732にマイナスのトルクを発生しないようにする。
【0112】
この実施形態のウィングは、自由流中のプロペラよりも大きな利点を有する。これは、ウィングの外チップがリング820、850に面し、これらのリングが壁として役立ち、ウィングの先端が渦を生じないようにするためである。かくして、1乃至5の範囲の低いアスペクト比で高効率のウィングが得られる。通常、プロペラブレードのアスペクト比は、ウィング先端の渦による揚力損が生じないようにするため、約10又はそれ以上である。別の利点は、一方の側だけが支持されるプロペラブレードとは異なり、各ウィングの両側が支持されるということである。これによりウィングの剛性が大幅に向上する。この設計の更に別の利点は、回転半径が小さいということである。これにより、ロータに作用する遠心力が減少し、かくしてその重量及び費用が小さくなる。
【0113】
この実施形態の別の利点は、抗力がタービン駆動トルクに主に寄与するということである。これは、ウィング735、736、737、738についてわかる。
【0114】
この実施形態の別の利点は、スロートが塞がれておらず、そのため空気流をノズル内に発生でき、その結果、始動の必要性が本願の上述の実施形態と比較して小さいということである。
【0115】
図10に示すウィングの断面は、従来の航空機の輪郭を備えているけれども、この設計にこの他の輪郭を使用してもよい。例えば、キャンバが高い(凹状形状の)輪郭を持つウィング、又は対称をなして凹状をなし、前縁及び後縁に丸みを付けた断面を持つウィング等を使用してもよい。
【0116】
図10のガイドベーン710、712、714は、図1におけるようにノズルの全長に沿って延びていないが、図1のベーンをこの実施形態及び任意の収束ノズルに適用できる。このロータの実施形態は、本願の任意のノズルと組み合わせて使用できる。
【0117】
図11は、図10の実施形態の正面/断面図である。長円形810は、ノズルステーションのスロートでの流れ152に対して垂直な断面である。ノズル自体は、その隅部の点A、B、C、及びDによって描かれているように、矩形である。ウィング736がスロートの頂部にあることが明らかにわかる。ウィングの側部のチップは、ステータの右側でリング820に連結されており、その左側チップがリング850に連結されている。ロータ機構は、この図では対称であり、従って、右側だけを説明する。リング820は中空のディスクであり、垂直な円筒形延長部821を備えている。この延長部は、ベアリング824上に「着座」している。ベアリング824の回転軸線は880である。ディスク820は、剛性で丈夫な鋼等の任意の材料で形成されている。
【0118】
肩部822がベアリング824の左方への移動を制限するということに着目されたい。ベアリング824は、静パイプ841に「着座」している。この静パイプ841の対称軸線は、ロータの軸線880と一致する。好ましくは金属製のディスク842、843、及び844は、パイプ841をステータディスク840及び構造壁814に連結する上で役立つ。ステータディスク840は、対応する左ステータディスク846と対称である。ガイドベーン711及び712は、スロート幅に亘って延びている。即ちステータディスク840と、846との間を延びている。各ガイドベーンの側縁部は、ステータディスク840及び846のいずれかに連結されている。回転ウィング、ロータの中心の静ガイドベーン、及び高速空気流が逆の位置にあるウィングに向かって流れないようにする本体を持つこのロータ設計が、本発明の追加の特徴である。
【0119】
図12は、円形断面の収束ノズルのスロート領域に組み込んだ、空気タービンの別の実施形態である。これは軸流タービンであり、従って、図12に示すほとんどのエレメントは、二つの代表的なエレメントを示す図14からわかるように、半径方向で対称である。図1、図7、及び図10におけるように、仮想線101は、ノズルの外殻であり、仮想線108は、ノズルの内殻である。これは、収束ノズルへの取り付けが容易な構成を備えた軸流タービンである。
【0120】
この新規な設計には幾つかの利点がある。第1の利点は、タービンをそのノズルから取り外す手順が容易であるため、保守性が良好であるということである。タービンは、定期的保守を必要とする可動部品を含む機械である。収束ノズルには可動部品がなく、従って、必要される保守が少ない。かくして、保守作業を容易にするため、タービンユニットを取り外して保守工場に持っていくことを容易に行うことができ、作動位置に残っている収束ノズルに交換ユニットを容易に取り付けることができる。ユニットは、ターボジェットエンジンと非常に似た構造を備えている。内部フレーム904、外殻901、及び内殻908を持つポッド900を備えている。ガイドベーン920は、軸線980に対して半径方向で対称であり、包囲コーン924は360°をなしており、来入空気流912を、ノズル出口を離れて区分910に進入した後、タービンスロート領域914に向かって差し向ける。空気流912は、スロートのところでその最大速度に達し、回転ハブ960を取り囲んでいるがこのハブと接触していない「ノズル」として既知の、複数のガイドベーン930を含むステータベーン930の第1列に到達する(図14のステータディスク9300を参照されたい)。静ガイドベーン930は、図12でわかるように、側方から見て矩形であり、図13及び図14でわかる断面輪郭932を有する。ガイドベーン930は、軸線980に対して垂直な同じ平面内に配置された複数の同じこのようなベーンのうちの一つであり、一緒になって、図14のタービン第1段ステータ9300を形成する。エレメント934は、同じ種類の例示のロータブレード940と隣接して配置されたこの複数のエレメントの例である。ロータハブ960は、そのシャフト906にしっかりと取り付けられている。このシャフト906は、ベアリング956、957、及びバー950、951を介してポッドの外構造フレーム904、905、906によって支持されている。これらのバーは、半径方向では対称ではないけれども、四つのアームの各々が対称をなして十字形を形成するように配置されており、更に、これらのアームの各々は、空気流中で静止しているときの空力学的抗力を最小にするため、翼状輪郭断面(図13参照)を備えている。
【0121】
これらのバーは、ハブ960に作用する長さ方向力及び側方力に耐えることができるということに着目されたい。ベアリング956、957により、ハブ960は、その長さ方向軸線980を中心として自由に回転できる。ロータディスク9400(図13及び図14参照)は、複数のブレード940を支持する。これらのブレード940は、図14でわかるように、ハブ960の周囲に配置されている。
【0122】
ステータブレードアレイ934及びその隣接したロータブレードアレイ944は、ここでは、空気流がステータベーン930からロータベーン940までどのように移動するのかを説明するために示してある。ステータブレード930は、ロータブレードを矢印990の方向に押す、即ち軸線980を中心として回転させる空力学的力を最大にするように、流れ913を、区分輪郭944アレイに向かって最良の迎え角で差し向ける。流れ913は、ロータ輪郭と出会うときの迎え角が最良であるように、ステータ輪郭によってその方向を変える。流れから運動エネルギーの大部分を取り出す上で、バナナ形状のロータ輪郭が有用である。流れがステータ区分及びロータ区分を蛇行して移動することにより、ロータを990方向(軸線980を中心として)に回転し、最終的には、長さ方向速度成分が小さく且つ接線方向速度成分が小さい流れ918として離れる。
【0123】
ロータブレード区分942は、対称で高キャンバの空力学的輪郭を備えている。これは、駆動流からできるだけ多くの運動エネルギーを取り出す上で重要である。断面932、942を夫々備えたステータディスク(ノズル)930及びロータディスク940のこの構成は、「インパルスタービン」として既知である。インパルスタービンは、流れから取り出されるエネルギーを最大にするように設計されている。各タービン段の、流れからエネルギーを取り出す性能に限界があるため、随意の追加のインパルス段タービン938、948を設計に追加する。
【0124】
シャフト906は、発電機970−972、及び後縁コーン975を支持する。かくして、シャフト906が回転するとき、発電機のロータ972も回転するが、発電機のステータ970は、バー950と同様のバー952によって支持されているため、静止したままである。電力は、支持体952に通した電線によって伝達される。
【0125】
タービンポッドフレーム904は、タービン発電機ユニットの重心のところに配置されており、かくして、フレーム904に取り付けられた支持フック109は、重心のところに配置される。フック109を使用してユニットを吊り上げるとき、ユニットはほぼ水平な姿勢をとり、収束ノズルの後部入口への導入を容易にする。ユニットがその位置にきた後、ボルトをノズルフレーム104を通してタービンフレーム902、903、904、905に打ち込み、タービンを収束ノズルにしっかりと取り付ける。タービンの後部コーンには、タービンユニットをそのノズルから引っ張るのを助けるための穴907が設けられている。
【0126】
図13は、タービンの主要部品の組み立て方法を示す。コーン924をシャフト906に連結した後、アーム950をベアリング956に取り付け、このベアリングをシャフト906に装着する。次いで、ハブディスク960を、好ましくはスプライン溝によってシャフトにしっかりと連結する。その後、ステータディスク9300をハブ960の周囲に取り付ける。ステータディスクは、静エレメントとなるように、後に、その外部リング938を介してポッドの内殻に連結される。次いで、ロータディスク9400をシャフトに組み込み、シャフトにハブ960としてしっかりと連結する。
【0127】
図14は、ステータディスク9300及びロータディスク9400の平面図である。
【0128】
ターボジェットエンジンと同様に組み立てた軸流タービンユニットを、収束ノズル又は収束−発散ノズルと関連して使用することが、本発明の一つの特徴である。
【0129】
図15は、本発明の別の実施形態を示す側面図である。収束ノズル1000は、タワーとして役立つ垂直パイプ1050に取り付けられている。このタワーは、ケーブル1047、1048、及びベース1068によって地面に固定されている。ケーブル1047、1048に対して垂直な平面で作用する追加の支持ケーブルは図示してない。かくして、高い構造(数100m)が安全に取り付けられる。この設計は、1mから始まって高くなる任意のタワー高に対して良好である。収束ノズル入口1010に進入する空気は、ガイドベーン1020乃至1023によって、パイプの頂部開口部1051内に差し向けられる。空気流は、パイプ内を流れ1014をなして押し下げられ、パイプ1057を通って流れ1016として流れ、任意のタービン内に及び特定的には本明細書中に説明した実施形態に流入する。この実施形態(図15参照)には三つの利点がある。即ち、
1.高速の風を捕らえるため、ノズルが地面から高くに配置されるということ、
2.保守が困難で費用がかかり且つ危険な高いタワーにタービンユニットを設置する必要がないということ、及び
3.収束ノズルの副生物が水であるという利点がある。
【0130】
上文中で与えられた数値解において、自然の空気の温度が4 oR低下することがわかっている。これにより、収束ノズルによって吸い込まれた雲は液化温度に達し、これにより水蒸気が水滴に変化し、これらの水滴が収束ノズルの内側を流れてパイプ1050、1055に入り、このパイプの底部に設けられた小さな穴を通ってパイプ1065に流入し、次いで水リザーバ(図示せず)に集められる。かくして、水が必要とされる乾燥した地域では、この実施形態は高品質の水及び電力を提供できる。ノズルを風に向けるため、垂直ウィング1090が構造1092を通して空力学的力を及ぼし、これによりノズルを風に向かって回転する。このように回転できるようにするため、図1におけるのと同様の機構130−140が使用される。パイプ1050は、パイプ1055内で回転できる。僅かに小径のパイプ1052が、パイプ1055にしっかりと取り付けられており、パイプ1050内に延びている。パイプ1052はシャフトとして役立ち、ウィング1090の力の作用により、パイプ1050がパイプ1052を中心として回転する。ディスク1041はパイプ1050にしっかりと取り付けられており、パイプ1055にしっかりと取り付けられた同様のディスク1042の上に載せてある。その結果、上側のディスク1041は、下側のディスク1042の上で摺動できる。クランプ1045が、その下側から、下側のディスク1042に取り付けられており、かくして、ディスク1041が上方に移動しないようにし、かくして、パイプ1050及びかくしてノズルアッセンブリ全体を、パイプ1050の中心線に沿って延びる垂直軸線を中心として回転できるように、パイプ1055の上に保持する。
【0131】
かくして、空力学的力が垂直ウィング1090に加わったとき、この力が収束ノズルアッセンブリに回転モーメントを発生し、空力学的力がゼロになるまで、即ちウィング1090が風の方向と一直線上に並び、入口1010が来入風に面するまで、ノズルを押して回転させる。
【0132】
図15の実施形態は、水の製造をも目的とする高出力タービンに適している。例えば、21.737ft/sの風速についてのデータを使用して2MW風力タービンの寸法を計算できる。
【数20】
【0133】
従って、ノズルのスロート面積は、
【数21】
でなければならない。従って、ノズルの入口面積は、スロート面積よりも10倍大きくなければならない、即ち107.7m2 、即ち直径10.7mの円形の入口でなければならない。これは、プロペラ式のベスタス(Vestas)V80タービンよりもかなり小さい。従って、このような装置は、高さが約12mであり且つ長さが27mであり、現在のプロペラ式風力タービンの技術よりも重量及び費用がかなり小さくなる。ベスタスV80は、15m/sの風から2MWを発生する。この風は、ここで使用した6.6m/sよりもかなり強い風である。従って、上記タービンの15m/sの風では約8MWを発生する。
【0134】
図15の実施形態は、発電所に適している。大型(入口直径が20m乃至100m)の収束ノズルを使用して数100MWを発生できる。更に、水が必要とされる場合には、地表近くに雲がある山の上にノズルを配置してもよい。かくして、雲を捉えて水にするのに短いパイプで済む。
【0135】
本発明は、空気の内部エネルギーを運動エネルギーに変換することにあるため、ノズル内の空気流を最大可能な速度まで加速し、最大のエネルギーをスロートに通すのが望ましい。この速度は、音速であるか或いはこれよりも僅かに低い速度である。この速度を得るため、収束−発散ノズルを使用しなければならない。数値で示した上掲の場合のように、ノズル出口ステーション110(図1参照)でのマッハ数、及びステーション110とステーション114との間の面積比により、音速が得られるスロート面積を決定する。風速が一定でないため、図16の別の実施形態が提供される。この実施形態では、図7の実施形態とは対照的に、入口面積を一定にしたまま、自動制御システム1230がスロート面積を変化する。ノズル1408は、自然の風1320がノズル1408に進入する入口1410を有する。このノズルは、スロート区分1414と、ステーション1414からステーション1418まで僅かに発散するノズルとを有する。ステーション1418のところで流れ1520がノズルから出て、風力タービン1500に進入する。この風力タービンの対称軸線1550は、ノズルの長さ方向対称軸線と一致する。制御システムのメモリーは、参考図書の表2からのデータ、及び様々な標高での密度、圧力、温度、及び音速等の標準大気及び局所的な大気のデータを記憶している。更に、スロートのところでの空気流の速度についての情報を制御システムのCPUに提供するため、少なくとも一つのピトー管1420が一体に設けられている。随意であるが、空気流1520の空気流の速度を計測するため、別のピトー管1421が設置されている。この図に示すノズルは、円形断面であってもよいし、矩形断面であってもよい。矩形断面の場合には、ステーション1414での局所的空気速度が、この場合に得ることができる最大の空気速度であるM=1、即ち音速に達するようにステーション1414でのスロートの面積を設定するため、随意のスロート面積制御システムを追加する。
【0136】
制御システムは、二つの電動アクチュエータ1238、1438を作動する。各アクチュエータは、移動自在のプッシュピストン1239、1439を作動する。これらのプッシュ/プルピストンは、ノズル内殻1408、1409に取り付けられており、かくして、これらのピストンがそれらのシリンダ1238、1438から出るように移動するとき、スロート1414を狭め、これらのピストンがそれらのシリンダ1238、1438内に入るように移動するとき、スロート1414を拡げる。ピトー管1420は、スロートでの空気流1325の速度を計測し、この速度の情報を制御装置(デジタルコンピュータ)1230に伝達する。制御ユニットは、スロート1414のところでM=1を得るため、そのアルゴリズム及び記憶されたデータを使用することによってスロート面積の増減いずれかを決定する。ピトー管1420が空気の速度の計測値を送り続けるため、制御ユニットは、スロート面積の変化後の速度についてのフィードバックを直ちに得、空気流の速度をどのように改善するのかの結論を出す。
【0137】
ピストン1239、1439は、殻部1408及び1409(好ましくは鋼製)を引っ張り装置1413に押し付ける。引っ張り装置1413は、殻部1409をポッドの外フレームに向かって引っ張り、スロート面積1414を拡大するばね式取り付け装置である。殻部の右側縁部1500は、内殻1509上で自由に摺動し、かくして、ピストン1239、1439がスロート1414を狭めるように移動するとき、殻部の縁部1500は左方に移動し、ピストン1239、1439がスロート1414を拡げるように移動するとき、殻部の縁部1500は右方に移動する。制御システムは、制御ユニット1230、バッテリー1232、及びアンテナ1234に接続された随意の無線通信機(制御システムは、2004年の一般的な携帯電話と類似している)を備えている。制御システムは、指令を送信するため、及びピトー管等のセンサから来るデータを受信するため、1449等の制御線を使用する。別の被制御システムは、電気式停止/制動システム1461である。この停止/制動システム1461は、垂直ウィング1490に及ぼされる空力学的風力による、垂直軸線1300を中心としたアッセンブリ全体の回転を停止する。停止システムは、アッセンブリ全体がいきなり回転することがないようにするために必要とされる。これは保守中に重要である。かくして携帯電話によって停止指令を送信できる。別の態様では、保守員が手動で作動できるように、簡単な電気スイッチを安全な距離に設置してもよい。電気式停止機構1461が設置されたシリンダ1462に回転自在の垂直シャフト1464が挿入された一つのプラットホーム1465上にアッセンブリ全体を設置する。シリンダ1462は、地面1470に置いたベース1460にしっかりと連結されている。アッセンブリ全体は、海上に、タワーの上に、ベッセルに配置でき、任意の所望の高さまで地面の上方に持ち上げることができる。プラットホーム1465は、収束−発散ノズルアッセンブリ1400を二つのコラム1469、1470上に支持する。風力タービンユニット1500は、図12のユニットと同様に、空気流がノズル1400を出てタービン1500の入口に進入するようにコラム1450に取り付けられている。随意であるが、タービンユニット1500には、図1の実施形態について説明した始動システムが設けられる。
【0138】
随意であるが、コラム1450の高さは、制御システムによって制御される。制御ユニット1230は、電動アクチュエータ1238、1239について使用されたのと同じ方法でコラム1450の高さを制御する。風がない場合にはコラム1450を下げ、かくして空気流1520の経路上に障害がないようにする。風が吹き始め、定常状態の流れがノズル1408−1409内に発生したとき、制御ユニットは、風力タービン1500を図示の作動位置まで持ち上げる指令を送出する。風力タービンが作動位置にある場合には、空気流1520が風力タービン入口に進入し、インパルスタービンロータに当たってこれらのロータを回転し、風力タービンの回転軸線1550に組み込んだ発電機で電気を発生する。次いで、発生した電気をグリッドに送出し、そのうちの幾分かが局所的バッテリー1530及び制御システムのバッテリー1232を充電する。随意のタービン始動システムは、バッテリー1530と、このバッテリー1530からの電流によって駆動されたとき、タービンロータを回転し、流れ1520に対する抵抗を減少する、タービンと一体の発電機/モータを含む。かくして、風力タービン1500を所定位置に持ち上げたとき、そのロータは既に回転している。風力タービンがその作動位置にあるとき、制御システムは始動プロセスを停止し、バッテリー1530は、モータ/発電機に電流を送出するのを停止する。風力ノズル出口平面1418と風力タービン入口との間の距離を変化させるため、随意の電動アクチュエータ1467、1468が設けられている。これは、入口での漏れ及びエネルギーの損失を最少にするために行われる。随意のピトー管1421は、得ることができる最大速度について制御システムにフィードバックを提供し、これと同時に、電流計/電圧計(図示せず)は、発電機が発生する電気についての重要なデータを提供する。
【0139】
図17は、本発明の別の実施形態を概略に示す。地面660にしっかりと取り付けられた垂直なパイプ600が2つのリング602及び606を支持する。これらのリングは、パイプ600を中心として回転できる。ビーム608、610がリング602及び606にしっかりと取り付けられている。ノズル620は、これらのビーム608、610にピン612及び614で取り付けられており、かくしてノズルは、随意であるが、ピン612及び614の垂直軸線を中心として回転できる。これは、ビーム608、610内の疲労応力を減少する上で重要である。
【0140】
ノズル620は、その内部に空気タービン690を支持する。この空気タービン690は、これらの用途の任意の空気タービン又は他の設計をノズルに設置できるということを強調するため、概略に示してある。随意の支持ビーム640がリング642を介してパイプ600に連結されている。垂直コラム644がノズルの後端を支持する。コラム644は、翼状断面輪郭を有し、かくしてスタビライザーとしても役立つ。地面によって支持された随意のコラム644はホイール648を有し、このホイールは、その回転軸線649を中心として回転できる。
【0141】
リング602及び606は、随意であるが、ノズル入口に進入する空気の速度を最少にするため、図示の断面605を持つウィング状フェアリング604に取り付けられている。風630が吹くと、ノズルが回転して図示のように風に向かう。これはノズルの横方向力により、パイプ600の垂直軸線601を中心として回転するためである。更に、随意のコラム644は、航空機の垂直スタビライザーと同様に作用し、ノズル600を風と整合するのを補助する。このような整合中、ホイール648は剛性の表面660上で転動する。空気流632がノズル628に進入した後、流れは空気タービン690に到達し、タービンのロータを回転し、発散ノズル629を空気流638として出る。
【0142】
この実施形態の利点は、自然に安定し、小型(入口直径が1m)から大型(入口直径が100m)のノズルに適用できるということである。風630は随意のウィング状フェアリング604を通過し、ノズルに空気流632として進入する。ノズルスロートでは、タービン690が空気の運動エネルギーを電気に変換する。ノズルは、ノズル内の空気流を安定させるのを補助する収束−発散ノズルであるということに着目されたい。
【0143】
上述の実施形態に関して上文中に説明した実施形態は、随意であるが、この実施形態にも適用できる。
【0144】
更に、ノズル620及びその支持機構602−649の設備全体に、パイプ600(及び随意のコラム644)を短縮する手段が設けられていてもよい。その結果、ノズルを下げることができる。装置全体を取り囲む保護壁(図示せず)により、風力タービンが強い風で損傷することがないようにブロックできる。
【0145】
更に、このような実施形態を海に設置することもでき、その場合には、ホイール648の代わりにボートやブイを使用する。
【0146】
図18は、本発明の別の実施形態を示す。図1に関し、空気が、面積が大きい入口から小さな断面積に向かって流れる場合に、収束ノズルが空気流の内部エネルギーの幾分かを運動エネルギーに変換するということがわかった(表2参照)。本発明を風力発電とは別個のものにするため、人工空気流を発生するのがよい。これは、収束ノズルが、空気の内部エネルギーを運動エネルギーに変換することによって、空気流の運動エネルギーを増大するためである。運動エネルギーに変換された内部エネルギーの量は、自然の(風の)運動エネルギーの、221.92 /−21.7372 =104.2倍であったことが示された。従って、本発明の別の実施形態は、図18に示すようにノズル入口に位置決めされた動力ファン520を含み、このファンが、空気タービン502が位置決めされたスロート514に向かう空気流530を発生する。空気タービン502は、本願の図12に示す空気タービンであるが、他の空気タービンを使用してもよい。図18に示す空気タービン502は、タービンの出力の幾分かを取り出し、これをギヤ562と係合したギヤ552を介してシャフト560に伝達する機械的動力出力システムを示す。シャフトは、回転動力をギヤボックス568に伝達し、任意の回転動力消費装置にシャフト569を介して伝達する。このような構成は、乗り物を駆動するためのエンジンである。タービン/エンジンを始動するため、運転者は、動力ファン520の電動モータ528をバッテリー(図示せず)に接続する。ファン520は空気530を収束ノズルに吸い込み、ここで空気流を加速し、タービン502に到達する。タービン502は、ここでは、発電機(図示せず)を備えている。発電機は、図12に示すのと同様に、シャフト551に取り付けられている。
【0147】
しかしながら、好ましくは電動モータ528によって駆動される動力ファン520は、何らかの外部動力を使用してもよい。例えば、任意の外部動力によって駆動される動力シャフト(PTO)をファンハブ526に連結し、これでファンを駆動してもよい。ファンは空気530を吸い込み、これを空気流532としてスロート514に向かって押す。ファン支持ビーム528は、抗力を最小にするため及び流れを対称軸線に沿って差し向けるため、翼状輪郭断面529を有する。好ましくはアルミニウム又はステンレス鋼製の随意のガイドベーン540がノズル幅に亘って設けられており、流れを剥離していない状態に保持し、乱流及び圧力上昇を最少にする。これらのガイドベーンは、ノズルの対称軸線550を中心として対称に形成された薄く平らな金属製シートであってもよいし、金属製の円形のシートであってもよい。これらのガイドベーンの重要な(本願の全てのノズルに適用できる)特徴は、ガイドベーンの下流縁部の傾斜が、互いに、及びノズルの対称軸線550に対して平行であるということである。これは、乱流を防ぐ上で、及びガイドベーン間を出る全ての副流が滑らかに組み合わせられるようにする上で重要である。
【0148】
更に、図20でわかるように、ファンを支持するために延長されたタービンシャフトは、ファンに動力を加えることができる。
【0149】
公称出力がXkWの電動モータ528でファンを駆動するものと仮定する。更に、ファンが電力の50%を運動エネルギーに変換し、乱流及び剥離によりノズルの等エントロピー性が80%に過ぎないものと仮定する。かくして、定常状態の流れが入口510に進入する。電気エネルギーの約30%しか電動モータ528によって消費されない。しかしながら、スロートでは、運動エネルギーを100倍に増大できる(スロートの面積が入口510の面積の1/10であると仮定すると、収束ノズルの作用により、スロートのところで、投入されたエネルギーの30倍以上の運動エネルギーを得る)。タービン502の効率が50%である場合には、15倍の出力を提供し、正味利得は14倍の出力である。かくして、空気の内部エネルギー源により、消費される全てのエネルギーよりも多くのエネルギーを発生する独立したエネルギー機械を提供する。ポッド500は、内殻508及び509、及びポッド外殻を支持する長さ方向ビーム502及びフレーム503を持つターボジェットエンジンポッドと同様に形成されている。図1乃至図17の実施形態について言及した全ての設置された構成をここに適用できる。この実施形態は、風力に関して作動でき、更に、エンジン508の動力とともに、又はこの動力なしで作動できるということに着目すべきである。この装置を自然の風で作動する場合には、整合用垂直テールウィングを必要とする。更に、鋭い入口前縁に着目されたい。これは、ターボジェットエンジンポッドの代表的な丸みを付けた前縁と異なっている。入口に動力ファンを設けてもよく、これは、電気グリッド及び自動車のエンジンに電力を提供する家庭用発電機、公共の建物の発電機として使用できる。公共の建物の発電機については、こうした建物に蒸気設備が備えられているため、ファンに動力を提供するのに蒸気動力を使用でき、発電機は電力をグリッドに提供する。
【0150】
図19は、本発明の更に別の実施形態を示す。この実施形態では、収束ノズル又は収束−発散ノズルを、動力ファン、即ち航空機を駆動するターボプロップエンジンとして機能するタービンと組み合わせる。図19は、ポッド、ノズル、及びファンの対称軸線550に沿った側断面図である。ポッド、ノズル、及びファンは、全て、軸線550に関して半径方向で対称である。ポッド500の入口のところでファン520がシャフト525に取り付けられている。このシャフト525の回転軸線は、軸線550と一致する。電動モータ528がシャフト525を回転し、かくしてファン520を回転する。このファン520は、前記ノズルに流入する空気530をその回転時に吸い込む。更に、下流矢印532は、静ウィング628を通過した後のノズル500内の流れを示す。ウィング628の断面529は、空気流を軸線550と平行に差し向ける。更に、ガイドベーン540(スプリッターベーンとしても周知である)は乱流を阻止し、空気流534をタービン入口514に向かって差し向ける副収束ノズルを形成する。空気流がタービンのスロートのところでその最高速度に達したとき、シャフト551に取り付けられたタービンロータ502を回転し、これを強制的に回転し、ベベルギヤ552を駆動する。このベベルギヤ552は、シャフト560に取り付けられたベベルギヤ562と係合している。シャフト560は、バッテリー又は他の電源等の外部動力源を使用してエンジンを始動した後、ファン520を駆動するための電力を発生する発電機568に連結されている。ファン520は、空気をノズル500及び608の両方に投入する。ファン520の外部分は、空気流570をガイドベーン640に投入する。この空気は、可動壁603を内方又は外方に移動してノズルの断面積を変化させ、排気区分618を離れるときに最大の推力を発生することによって加速又は減速される。ノズル壁603は、シリンダに設けられた矩形の切欠きの形状を有する。ノズル周囲に設けられた幾つかのこのような部品により、ノズルのスロートを変化させることができる。従って、壁603は移動自在であり且つヒンジ604、電動アクチュエータ606、及び取り付けエレメント609によってポッド600に連結されている。電動アクチュエータ606の他端には、シリンダ605内に引っ込められるアクチュエータアーム606が設けられており、このアームは、エレメント612に力を加えて左方に移動し且つヒンジ604のヒンジ線を中心として反時計廻り方向に回転し、かくしてノズルの断面を増大する。別の態様では、アクチュエータ605、606は液圧アクチュエータであってもよい。図19の下半分は、両ノズルがそれらの通常の位置にある場合のエンジンを示し、フレーム610がポッド600を補剛しており且つポッド外殻609にしっかりと連結されている。ポッド外殻609は弾性材料であり、移動自在のドア616の殻部615に押し付けられ、かくして、ドア616を移動すると、殻部615と接触したままとなる。ビーム620は、翼状輪郭断面621を有する半径方向に分配された複数の支持ビームであり、タービンを収容した内ノズルを外ポッド内殻602に連結する。
【0151】
エンジンを始動するため、バッテリー又は他の電源から電流を電動モータ528に提供し、このモータがファンのシャフト525を駆動する。
【0152】
航空機のエンジンは、離陸時の速度ゼロから巡行中の最大速度までの広範な空気速度で作動する必要があるため、航空機の速度をマッハ=1.0に近付ける収束−発散ノズルの理論的スロート面積は、入口速度に従って変化する。かくして、エンジンが離陸時の速度を主眼として設計された場合には、航空機が速度を得たときにノズルのスロート面積を増大する必要がある。そうでない場合には、流れが絞られてしまい、即ち、スロートのところでマッハ=1が得られるが、空気流の質量速度は上昇しない。このように絞られることがないようにするため、ノズル内壁516は移動自在であり、断面積増大位置で示してあり、この際、閉鎖位置を607で示す。形状が可変のこのノズルが、本発明の別の特徴である。
【0153】
このエンジンの推力を増大するため、随意の燃料噴射装置700、704、及び706が設けられている。このような燃料噴射装置は、ノズル断面に亘って半径方向に分配されている(空気流を案内する半径方向に分配された幾つかのウィング628(図示せず)が設けられており、これらのウィングの各々が、随意であるが、これらの燃料噴射装置を支持している)。線702は、燃焼する燃料の火炎が伝播する円錐形を示す。このような燃料噴射装置は、特に高高度(6096m(20000ft))巡行時に必要とされ、離陸の目的でも使用できる。これは、このエンジンの推力が、入口での空気流の速度で決まるためである。
【0154】
図19は、ファンを電動モータ528で駆動することが示してある。しかしながら、ファンは、タービンロータ502をファン520に連結するシャフトによって駆動でき、かくして大出力の電動モータ528の必要をなくす。このような解決策を図20に示す。
【0155】
上述の実施形態について説明したのと同様の制御システム(図19には示さず)を使用し、図19及び図20の両実施形態の余分の空気流用のドア516、616を制御する。エンジンの推力を制御するため、エンジン始動電力とは方向が逆の直流を電動モータ528に提供する。発電機が発生した電流(直流)の変化は、発電機568の出力を電動モータ528まで延びる電線に連結する電線の接続を変化することによって行われる。別の態様では、移動自在のドア616を移動して外ノズル602出口領域に近付ける。推力逆転装置を図21に示す。
【0156】
このようなエンジンが航空機のエンジンとして役立つことができることを示すため、入口面積が0.5m2 のこのようなエンジンの推力及び出力を計算する。ここで、海面高さでの航空機の速度VAC=0、中央ノズル入口での空気流をV=34m/s=111.5ft/sとする。
標準大気:T=59+460=519 oR;
ρ=0.002378;
p=2116.2lb/ft2 ;
a=1117ft/s
【0157】
1.中央ノズルを通る質量流量mを計算する。
【数22】
【0158】
2.静止状態の空気を押してV=34ft/s(入口)にするのに必要なエネルギー毎秒を計算する。
【数23】
【0159】
3.マッハ=0.1についてのスロートの断面積を参考図書の表2を使用して計算する。
【数24】
【0160】
4.マッハ=1、即ちV=1117ft/sと仮定してスロートでのエネルギー毎秒を計算する。
【数25】
【0161】
5.タービンの効率を45%とした場合の、プロペラを駆動するのに利用できるエネルギーを計算する。
【数26】
【0162】
6.航空機の速度が185ft/sである場合のエンジンの出力を計算する。ファンは、この速度で空気を約223.4ft/s即ちマッハ=0.2で押すものと仮定される。
参考図書の表2から、
A* /A=0.3374
∴ A* =0.5×0.3374
∴ =0.1687m2 を得る。
このスロート面積は、上文中でV=34m/s=111.5ft/sについて計算したスロート面積よりも大きい。
従って、次いで比較的小さなスロートを絞ってもよく、これが起こらないようにするため、図19のドア516を開放し、余分の流れを流れ533としてタービンを迂回させ、外部ノズルに進入する流れ632と合流させる。これらの流れは両方とも、タービンによって供給された出力によって、上文中で計算したように駆動される。
エンジンの出力を上昇するため、ジェット燃料を噴射してもよい。燃料の燃焼によりノズル内の圧力が上昇し、タービンのところでのマッハ数が増大する。これは、音速が温度の平方根と比例するためである。かくして、タービン内のガスの温度が1000 oRまで上昇した場合、音速は、
√(γRT)=√(1.4×1715×1000)=1549.5である。これは、海面高さの標準大気の温度の1.387倍である。この音速の増大は、タービンの出力が1.3873 =2.67倍増大するということを意味する。
エンジンの出力を増大するための別の解決策は、ほぼ回転速度、即ち約マッハ=0.15である航空機速度に対してエンジンを設計することである。入口510での空気流の速度をマッハ=0.2であると仮定すると、
A* /A=0.3374
∴ A* =0.5×0.3374
∴ =0.1687m2 が得られる。
【0163】
7.入口510での、空気流が入口に進入する前の空気流のよどみパラメータは、
【数27】
【0164】
8.入口510での質量流量mを計算する。
M=0からM=2までの等エントロピー空気加速を仮定し、表2からρを得る。
【数28】
【0165】
9.タービンのスロートでの空気の運動エネルギーを計算する。M=1と仮定する。
1)スロートでの静温度を表から計算する。
【数29】
2)音速を計算する。
【数30】
3)スロートでの空気流の速度は、V=a×1.0=1019.7である。
【数31】
この値を上文中で計算した値と比較すると、1455703/890226=1.63となり、大幅な上昇が得られる。
このエネルギーの45%を使用できるものと仮定すると、
0.45×1455703=655066ft・lbが得られる。
【0166】
10.プロペラによって空気流の速度をM=0.15からM=0.2まで上昇するのに必要なエネルギー毎秒を計算する。
【数32】
【0167】
11.プロペラで利用できる正味エネルギー毎秒は、
【数33】
である。
【0168】
M=0.15の航空機の速度でのM=1及びタービンのスロートでのM=1.0についてエンジンを設計することによって、A=0.1687m2 のスロート面積を持つ大型のタービンを必要とする。航空機速度V=0でのエンジン出力は、スロートでの空気流の速度が1.0よりも低いため、低い。
【0169】
当然のことながら、ここで使用する大きさの、燃料により出力を発生する現在のターボプロップエンジンは、約3000・を発生するが、こうしたエンジンは、大量の燃料を使用するということを思い出さなければならない。この大量の燃料は、航空機の離陸時重量の大きな部分を占め、即ちATR42−400等の航空機の離陸時重量の約25%を占める。
【0170】
従って、本発明によるエンジンは、
1.燃料を使用しない。このことは、航空機の飛行範囲が無限であるということを意味する。
2.航空機が安全である。火災の危険がない。
3.航空機は燃料タンクも燃料システムも必要としない。従って、軽量且つ安価に製造でき、そのため操業に要する費用が小さい。
4.航空機は遥かに静粛である。これは、エンジンの騒音の大部分が燃料の燃焼によって発生するためである。
5.航空機はCO2を発生せず、地球温暖化プロセスに参与せず、逆に、空気流の温度を下げる。かくしてこのエンジンは環境に非常にやさしい。
【0171】
図20は、本発明によるエンジンの別の実施形態を示す。これは、同様のノズル設計を持つ、航空機用の別のターボプロップエンジンである。このエンジンは、二つの同軸の駆動シャフトを備えている。内駆動シャフト591は、タービン低空気速度ロータ504を大ファン520に連結し、駆動シャフト590は、高空気速度ロータ502を小内ファン532に連結する。このエンジンを始動するため、電動モータ587に電流を提供する。このモータは、シャフト584を介してベベルギヤ組583−582を駆動する。ギヤ582は、小ファン532を駆動する外シャフト590にしっかりと連結されている。ファン532が回転すると、このファンが空気530を吸い込み、この空気が内側ノズル500に進入し、大ファン520及び静ウィング528(この図には一つしか示してない)を通過する。ウィング528は内シャフト591をベアリング571を介して支持するということに着目されたい。内シャフト591は、タービン側部でアーム593及びベアリング575によって支持されている。同様に、外シャフト590は、静ウィング531(この図には一つしか示してない)によってベアリング573を介して支持されており、外シャフトの他端は、アーム592及びベアリング576によって支持されている。静ウィング528及び531は、ファンが発生した空気流の方向を変え、エンジンの軸線550と平行に流す。空気流は、静ガイド/支持ウィング531を通過した後、軸線550に対して半径方向で対称なガイドベーン(スプリッターベーンとしても既知である)540によってタービン入口に差し向けられる。このベーンは、ノズル内に等エントロピー流れを維持し、乱流が発生しないようにするための随意のエレメントである。空気流が、収束ノズル500によって加速された後、タービンに高速で進入するとき、タービンロータ502を回転し、その後、タービンロータ504を回転する。ロータ504は、タービンを通過する空気流の運動エネルギーの大部分を取り出すように設計されている。空気は、タービンロータを流れ535として離れた後、発散ノズル509内で膨張し、タービンを流れ536として出る。ロータ504は内シャフト591を回転し、この内シャフト591は、ハブ570によってシャフト591にしっかりと連結された大ファン520を回転する。このファンは、このエンジンの主推力発生機である。ファン520は空気流をノズル500及び608の両方に入れる。内ノズル内の空気が余分にならないようにするため、ドア516を開放する(図19についての説明を参照されたい)。この空気流533は外ノズルに進入し、空気流632と合流し、外ノズル608に進入する。随意のガイドベーン(軸線550に対して半径方向で対称である)は、空気流を乱流がない状態に保持するのを補助するということに着目されたい。随意である(図面に示してない)が、軸線から半径方向外方に延びる追加のガイドベーンが、ファンの作動による流れの渦運動を阻止するのを補助する。
【0172】
上述の実施形態に説明したのと同様の制御システム(図19及び図20参照)を使用し、図19及び図20の両実施形態の余分の空気流用のドア516、616を制御する。エンジンの推力を制御するため、ケース568内のブレーキを作動して大ファン520の回転数を制御し、かくしてこのエンジンの推力を変化する。
【0173】
図21は、本発明によるターボプロップエンジンの別の実施形態を示す。このエンジンは、基本的には、図20に示すエンジンと同じである。しかしながら、推力逆転装置616を備えている。外ノズル後エレメント616aは、航空機巡行位置にある。二つの電動アクチュエータ605及び676によってポッド600に連結されている。着陸中、大きな制動力が必要とされる場合には、パイロットは推力逆転装置を作動する。即ち、図面の他方の半分に678として示すように、アクチュエータ676を一杯に引っ込めると同時にアクチュエータ605を、675で示すように、一杯に延ばす。この相互作用により、617bとして示すドア616aの新たな位置をとる。位置617bは、ノズルの排気面積を減少し、流れの幾分かを633及び634として戻し、かくして制動力を発生する。エンジンポッドは、全てが同時に作動する幾つかのこのようなドアを持つということは理解されるべきである。更に、電動モータ568から延びるシャフトは、その取り付け後には「浮動」状態にない。即ち可動ドア617からずらしてあるということに着目されたい。実際には、シャフトは、ノズルの移動不能の部分があるこのような可動ドア616間に取り付けられる。
【0174】
図22は、本発明による別の実施形態を示す。この実施形態は、収束ノズル内の空気流から電気を発生する。この実施形態は、図19及び図20の実施形態と同様のターボプロップエンジンと同じ技術を使用する。同様のファン532が外部動力源によって始動され、このファンが外シャフト590を駆動する。このような外部動力源は、バッテリーであってもよいし、又は電動モータ585を駆動する他の電力源であってもよい。電動モータ585は、シャフト584を回転し、このシャフト584がベベルギヤ582、583によって外シャフト590を駆動し、これにより小ファン560を回転し、空気530をノズル500に吸い込む。流れ532は、収束ノズルによってファン560に向かって加速されるとき、翼状輪郭断面を持つファン560及び支持ビーム562を通過する。支持ウィング562は、ベアリング526を介して外シャフト590を支持する。幾つかの支持エレメント562がタービンの対称軸線550を中心として半径方向に分配されている。これらのエレメントは、更に、流れを差し向け且つファン560からの回転流れ速度をなくすのに役立つ。随意のガイドベーン540及び541は、流れを乱流がない状態に保持するのを補助する。これらのガイドベーンは、対称軸線550に対して半径方向で対称である。空気流は、タービンにほぼ音速で進入し、タービンのロータ502及び504を回転する。ロータ502は外シャフト590を駆動し、このシャフトが小ファン560を回転する。また、ロータ504は内シャフト591を駆動し、この内シャフト591が大ファン520を駆動する。ロータ504がタービンの運動エネルギーの大部分を得るため(高効率のタービンブレード輪郭を備えることによって)、二つの消費部分について空気の運動エネルギーの大部分を使用する。第1に、大ファン520を駆動するため、及び第2にベベルギヤ552、562及びシャフト560によって発電機568を駆動するためである。かくして、大量の空気がタービンに押し込まれ、ロータ504が発生する大量の動力を発電機568に送出する。発生した電流は、消費部分に、又はパブリックグリッドに伝達される。
【0175】
図18の実施形態を越える図22の実施形態の利点は、小ファン560が、ファン560を始動するために少量の動力しか必要としないということである。ファン560が吸い込みを開始した後、タービンは、大ファン520を駆動するための動力を提供する。例えば、個人の家庭用の装置は、直径50cmのファンを使用してもよく、約7kWの電力を提供するには、大ファンの直径は約1mである。タービンのロータを連結するシャフトの代わりに、発電機585が発生した電気が電動モータを駆動するように、装置を直接駆動する電動モータを使用してもよいということに着目すべきである(図22には示してないが、図18にエレメント528として示してある)。電動モータのシャフトは、図18に示すように、ファンのシャフトとしても役立つ。このことは、ファン520についても適用される。ファン520は、随意であるが、発電機568から電気を得る電動モータ(図22には示さず)によって駆動される。
【0176】
本発明に従って、動力式のファンを備えた又は備えていない任意のノズル設計及び空気タービン設計の任意の組み合わせを形成できるということに着目すべきである。かくして、図16の収束−発散ノズルを、本願に説明した任意の空気タービンと組み合わせることができる。更に、本発明の一実施形態に関して説明した任意のシステムは、実際的である場合には、本明細書中に説明した他の実施形態とも関連している。これらの場合もまた、本発明の部分である。例えば、始動システムは、風力タービンの全ての実施形態と関連している。一例は、随意の制御システム、ピトー管空気速度計測装置、任意の動作センサ、及び図14に関して説明した停止システムを使用することである。更に、従来の「プロペラ」状風力タービンを1つ、又は幾つかを次々に並べて収束ノズルのスロートに設置してもよく、又は図16に示すように出口ノズルの僅かに後方に設置してもよい。
【0177】
数値計算からわかるように、収束ノズルを通って流れる空気は冷却され、従ってノズル及びタービンのロータブレードに氷が堆積する。氷が堆積しないようにするための一つの方法は、作動前及び作動中にノズルエレメント及びタービンエレメントの表面にオイルや灯油等の氷を防ぐ液体をスプレーすることである。別の方法は、電流や電気ヒーターで発生した高温の空気を使用してこれらの表面を温め、重要な場所の氷を溶かすことである。
【0178】
本発明は、上文中に単なる例として説明した実施形態に限定されない。本発明は、特許請求の範囲によってのみ限定される。
【技術分野】
【0001】
本発明は、ガスの運動エネルギーを増大し、このエネルギーから電気や機械的エネルギーを発生するための方法及び装置に関する。
【背景技術】
【0002】
今日、風の強い地域では、風力タービンが非常に一般的である。これらの風力タービンの設計は、航空機のプロペラと似ている。これらの風力タービンは、自然の風と向き合うように、高いタワーに取り付けられる。自然の風は風力タービンを回転し、この回転により発電機を駆動し、電気を発生する。プロペラの回転を開始するために約4m/sの最小風速を必要とする。発電機が発生した電気は、タービンの所有者が使用するか或いは電気グリッドに伝達される。
【0003】
このような製品についての良好な例は、この分野での主導的製造者が製造している。以下のデータは、2MWを発生する機械についてのデータである。
直径 80m
作動面積 5027m2
ブレードの数 3枚
タワーのデータ
ハブ高(概略) 60−67−78−100m
作動データ
作動風速 4m/s
公称風速 15m/s
停止風速 25m/s(この機械の作動可能な最大速度)
発電機
公称出力 2000kW
重量
タワー 110t
ナセル 61t
ロータ(プロペラ) 34t
総重量 205t
注:タワーが高いと重量が増大する。
【0004】
この大型の機械の公称出力は、15m/sの公称風速で2MWである。
【0005】
風力タービンのプロペラが回転するとき、プロペラの先端が描く円内を流れる空気の部分だけが任意のプロペラブレードの十分近くを実際に流れ、ブレードに作用する空力学的揚力を発生する。これらの揚力(実際には、これらの揚力の、プロペラの回転平面内の、ブレードセグメントが描く円に対して接線方向の成分)は、プロペラブレードに沿って分配され、プロペラ軸線を中心として回転モーメントを発生する。この揚力にプロペラの回転軸線からの夫々の距離を乗じ、これを所定量のトルクに合わせて蓄積する。これがプロペラブレードを回転する。プロペラブレード間を大量の空気が流れるため、この空気はプロペラに揚力もトルクも及ぼさない。こうしたプロペラが、プロペラの円を横切る空気の運動エネルギーの約20%しか使用しないのはこうした理由による。従って、低い風速で十分な動力を発生するためには、非常に大型のプロペラが必要とされる。
【0006】
効率が低いため、これらの風力タービンは大量の電力を発生するためには大型化しなければならない。従って、こうした風力タービンは、大型で重量があり且つ高価であり、動くブレードは鳥類及び航空機にとって危険である。従って、これらの風力タービンは、電力に対する要求が大きい都市のビルディングには設置されない。
【0007】
風力発電は、多くの理由により、非常に望ましい。これはクリーンで汚染のないエネルギー源であり、CO2を発生せず、風は無料であり、従って、安価なクリーンエネルギー源であるが、多くの場合、風はこうした大型のプロペラを作動するには弱すぎる。
【発明の概要】
【発明が解決しようとする課題】
【0008】
従って、更に効率的でコンパクトで製造費が低く都市のビルディングの屋根に設置できる風力タービンを提供するのが望ましい。
【0009】
これらの風力タービンの別の固有の問題点は、これらが強い風での作動が制限されるということである。これは、プロペラブレードが重く、約11tに及び、かくして高い回転速度での遠心力が膨大なものとなり、これらのブレードを25m/s以上の風に対して設計することを経済的に正当化できないためである。
【課題を解決するための手段】
【0010】
本発明によれば、ガスの内部エネルギーを運動エネルギーに変換し、ガスの運動エネルギーを機械的エネルギーに変換し、これを電気エネルギーに変換する方法及びシステムが提供される。
【0011】
本発明の主な特徴は、来入風に向いた収束ノズルを使用することである。ノズルの断面積は下流に向かって減少し、そのため空気速度が上昇する。即ち空気の内部エネルギーが運動エネルギーに変換される。
【0012】
本発明の別の特徴は、収束ノズルの出口に配置した空気タービンと組み合わせることである。これにより、ノズルを出る空気が空気タービンを駆動する。
【0013】
本発明の更に別の特徴は、駆動タービンの回転により発電機を駆動し、これにより、回転動力から電気を発生することである。
【0014】
本発明の別の特徴は、タービンのロータの回転軸線が、空気流の方向に対して垂直であるということである。
【0015】
本発明の更に別の特徴は、ノズル内の空気流の方向を定めるガイドベーンをタービンの収束ノズルに組み込むことである。
【0016】
本発明の更に別の特徴は、タービンブレードが、ノズルスロートの形状及び大きさを備えているということである。
【0017】
本発明の更に別の特徴は、ノズル入口の断面が可変であるということである。
【0018】
本発明の更に別の特徴は、ノズルスロートのところでの空気速度を監視し、スロートのところで、音速を超えることなく、最大空気速度を得るためにノズル入口面積を変化することである。
【0019】
本発明の更に別の特徴は、追加の空気が漏れ出すことができるように、ノズルスロートの開口部を開閉する制御システムを組み込むことである。
【0020】
本発明の更に別の特徴は、加速した空気の温度が、自然の風の温度と比較して低下することである。
【0021】
本発明の更に別の特徴は、空気をノズルから吸い込み、ノズル内での静圧の上昇を防ぎ、ノズルを通る定常流を発生するため、一分以内にタービンを回転する始動プロセスである。
【0022】
本発明の更に別の特徴は、ノズル入口を来入風に向かって差し向ける自動制御システムを組み込むことである。
【0023】
本発明の更に別の特徴は、矩形のノズル入口である。
【0024】
本発明の更に別の特徴は、収束ノズルをそのタービンから分離し、ノズル出口を空気タービンにパイプで連結し、このパイプが、ノズルからの加速された空気をタービン入口に伝達することである。
【0025】
本発明の更に別の特徴は、収束ノズルとともにインパルスタービンを使用することである。
【0026】
本発明の更に別の特徴は、タービンノズルに進入する空気流及び雲内の水蒸気から水を発生することである。
【0027】
本発明の更に別の特徴は、ノズル内の空気をマッハ=1.0まで加速するため、収束−発散ノズルのスロートを変化する制御システムである。
【0028】
本発明の更に別の特徴は、ノズルを保持し、風に向かって回転しないようにする停止機構を組み込むことである。
【0029】
本発明の更に別の特徴は、水がノズルやロータチャンバ内に溜まらないようにする水ドレンシステムを組み込むことである。
【0030】
本発明の更に別の特徴は、可変ノズルスロート断面積である。
【0031】
本発明の更に別の特徴は、ノズルを出る空気流中に空気流タービンを配置することである。
【0032】
本発明の更に別の特徴は、風力タービンの重心の真上に取り付けられた吊り下げ用フックを使用することである。
【0033】
本発明の更に別の特徴は、タービンユニットを収束−発散ノズルのスロートに挿入することである。
【0034】
本発明の更に別の特徴は、タービンが、ノズル入口の前方で、その垂直回転軸線を中心として風と向き合うように整合していることである。
【0035】
本発明の更に別の特徴は、空気をノズルに押し込む動力ファンが設けられた収束ノズルにより、ノズルが空気の内部エネルギーを運動エネルギーに変換し、この運動エネルギーがタービンを駆動して動力ファンによって加えられたよりも多くの動力を発生することである。
【0036】
本発明の更に別の特徴は、動力ファンが設けられた収束ノズル、及び前記動力ファンにエネルギーを提供するタービンであり、この組み合わせは、航空機を駆動するターボプロップエンジンである。
【0037】
本発明の更に別の特徴は、動力ファンが設けられた収束ノズル、及び前記動力ファンを機械的に駆動するタービンであり、この組み合わせは、航空機を駆動するターボプロップエンジンである。
【0038】
本発明の更に別の特徴は、動力ファンが設けられた内収束ノズル、前記動力ファンにエネルギーを提供するタービン、及び別のノズルに空気を押し込む追加のファンであり、この組み合わせは、航空機を駆動するターボプロップエンジンである。
【0039】
本発明の更に別の特徴は、動力ファンが設けられた形状が可変の内収束ノズル、及び前記動力ファンにエネルギーを提供するタービン、及び形状が可変の別のノズルに空気を押し込む追加のファンであり、この組み合わせは、航空機19、20を駆動するターボプロップエンジンである。
【0040】
本発明の更に別の特徴は、動力ファンが設けられた形状が可変の内収束ノズル、及び前記動力ファンにエネルギーを提供するタービン、及び流れ方向を変化する形状が可変の別のノズルに空気を押し込む追加のファンであり、この組み合わせは、航空機を駆動する、推力逆転装置を備えたターボプロップエンジンである。
【0041】
本発明の更に別の特徴は、空気流のエネルギー及び温度を上昇し、かくして質量流量を増大し、タービン内で音速を発生し、タービンのエネルギー発生量を増大するため、前記ターボプロップエンジンの収束ノズルに燃料噴射装置を組み込むことである。
【0042】
本発明の更に別の特徴は、自然の風とは別個に空気の内部エネルギーから電気を発生する装置である。この装置は、装置の始動に使用される第1動力ファンが設けられた収束ノズルと、空気の運動エネルギーを機械的エネルギーに変換するタービンと、を有し、第1タービン、第2動力ファン、及び電気を発生する発電機を駆動する。
【0043】
本発明は、以下の詳細な説明を添付図面を参照して読むことにより、更に良く理解されるであろう。
【図面の簡単な説明】
【0044】
【図1】図1は、円形の入口を持つ収束ノズルを備えた本発明の一実施形態による風力タービンの側断面図である。
【図2】図2は、図1の風力タービンの正面図である。
【図3】図3は、図1の風力タービンの平断面図である。
【図4】図4は、矩形の入口を持つ、本発明の別の実施形態による風力タービンの側断面図である。
【図5】図5は、図4の風力タービンの正面図である。
【図6】図6は、図4の風力タービンの平断面図である。
【図7】図7は、入口断面積が可変の、本発明の別の実施形態による風力タービンの側断面図である。
【図8】図8は、図7の風力タービンの正面図である。
【図9】図9は、図7の風力タービンの平断面図である。
【図10】図10は、ガイドベーンを持つ、翼状のロータ及びステータを備えた、本発明の別の実施形態による風力タービンの側断面図である。
【図11】図11は、図10の風力タービンの正面図である。
【図12】図12は、軸線方向インパルスタービンを持つ、本発明の別の実施形態による風力タービンの断面図である。
【図13】図13は、図12の空気タービンのタービンシャフト、支持アーム、ステータディスク、及びロータディスクを示す断面図である。
【図14】図14は、図12のステータディスク及びロータディスクの平面図である。
【図15】図15は、ノズルを空気タービンから分離した、本発明の別の実施形態による風力タービンの側断面図である。
【図16】図16は、収束−発散ノズルをタービンから分離した、本発明の別の実施形態による風力タービンの側断面図である。
【図17】図17は、垂直回転軸線が収束ノズルの前方にある、本発明の別の実施形態による風力タービンの側断面図である。
【図18】図18は、動力ファンを備えたノズルの側断面図である。
【図19】図19は、動力ファン及びタービンを備えており、航空機用ターボプロップエンジンを形成するノズルの側断面図である。
【図20】図20は、動力ファン及びタービンを備えており、航空機用2段ターボプロップエンジンを形成するノズルの側断面図である。
【図21】図21は、動力ファン、タービン、及び推力逆転装置を備えており、航空機用2段ターボプロップエンジンを形成するノズルの側断面図である。
【図22】図22は、動力ファン及びタービンを備えており、2段ターボ発電機を形成するノズルの側断面図である。
【発明を実施するための形態】
【0045】
今日の風力タービンは、空気流、即ち風で駆動されるプロペラを備えている。風が強くなるに従って、プロペラブレードを駆動するための更に多くの運動エネルギーを利用できるが、プロペラブレードが大きく且つ重量がある(ブレード一枚当たり約11000kg)ため、風速が特定のレベルを越えると、ブレードが遠心力で壊れることがないようにするため、ブレードの強度及びシャフトへのその取り付け強度に従って回転を停止しなければならない。かくして、空気タービンはその仕事を停止し、多くの風力エネルギーが無駄になる。他方、風が弱過ぎ、約4m/s又はそれよりも弱い場合には、大型のプロペラでも作動しない。これは、利用可能な運動エネルギーが、大型の空気タービンを回転させるには弱すぎるためである。本発明は、こうした問題点を解決し、本発明が、空気タービンをどれ程コンパクトにできるか、及び弱い風並びに高速の風でどのようにして比較的多くの電気を発生するのかを説明する。
【0046】
更に、ノズル入口に流入する空気流を発生する動力ファンを設置することには価値がある。これは、収束−発散ノズルが、空気流の運動エネルギーをそのスロートのところで約10倍に増大できるためである。かくして正味動力出力は動力入力よりも大きく、風に左右されないエンジンを得る。空気を吸い込んで空気流を収束ノズル又は収束−発散ノズルに押し込む動力ファンが、本発明の主要な特徴である。
【0047】
風の運動エネルギーは、以下の式によって数学的に表現できる。
【数1】
ここで、Vは空気の速度であり、
ρは空気の密度であり、
Aは空気流の断面積であり、
”×”は掛け算の記号であり、後に省略される。
【0048】
従って、空気の速度がゼロであれば、発生する運動エネルギーはゼロである。
【0049】
(注:本特許出願の全ての式及び使用したデータは、下記の参考図書から引用した。)
「空気力学の基礎(Foundations of Aerodynamics)(第二版)」A.M.クーセ及びJ.D.シェッツアー著
ミシガン大学(米国)航空工学科
出版社:ジョン ウィリー アンド サンズ社
米国国会図書館出版目録カード番号:59−14122
【0050】
驚くべきことに、自然の風の空気は、たとえ凍結温度でも、その運動エネルギーと比較して大量のエネルギー(「内部」エネルギーと呼ぶ)を持っている。
【0051】
この状態を理解するため、単位質量についての等エントロピー圧縮流のエネルギー方程式を参照しなければならない。
【数2】
(上記方程式については、参考図書の第140頁の方程式24を参照されたい。)
【0052】
風について論じているため、上記方程式中の全ての関連したパラメータは、以下の特定の条件の空気に関する。
Cpは、空気の定圧比熱である。上記参考図書の第132頁を参照されたい。
Cvは、空気の定積比熱である。上記参考図書の第131頁を参照されたい。
γ=1.4は、1000 oR(ランキン温度)の空気についてのCp/Cvの比である。
Tは、空気の絶対温度である。
Vは、空気の速度である。
【0053】
Cp×Tは、ガス(空気)の内部エネルギーであり、この際、V2 /2は、単位質量のガスの運動エネルギーである。等エントロピー流れ(空気に熱が加えられも奪われもしない流れ)については、式2即ち方程式24によって与えられたエネルギー関係を満たさなければならない。即ち、エネルギー保存則が存在する。
【0054】
運動エネルギーと内部エネルギーとの間の比を示すため、これらのエネルギーを、比較的強い25m/s(V80型2MW(メガワット)風力タービンの作動可能な最大風速)の、温度T=32 oF(0℃)の風について計算する。これは、このような空気タービンが普及している北半球で冬季に一般的な非常に低温の空気である。
英国の単位系を使用すると、
Cp=6000ft×lb/slug oR
T=460+32=492 oR
V=25/0.3048=82.02ft/s
内部エネルギーは、CpT=6000×492=2952000ft×lb/slugであり、
運動エネルギーは、V2 /2=(82.02)2 /2=3201.6ft×lb/slugである。
【0055】
従って、空気の運動エネルギーの、空気の内部エネルギーに対する比は、この場合、
3201.6/2952000=0.00108である。即ち、運動エネルギーは、空気の内部エネルギーの約1/1000である。これは、高性能の2MW空気タービンについての作動可能な最大風速についてである。風が弱いと、エネルギー比は更に小さくなる。
【0056】
穏やかな風(10m/sよりも小さい)では運動エネルギーが小さいため、この種の風力タービンによって集められるエネルギーの量を増大するには、大面積のロータブレードが必要となる。ロータブレードが大きくなればなる程、V80等の機械全体が大型になり且つ高価になり、その結果、高価な電気を発生することになる。
【0057】
従って、空気の内部エネルギー源を利用する方法を案出する者が誰もいなかったということは驚くべきことである。本発明は、空気の内部エネルギーを運動エネルギーに変換し、次いで新規なタービン設計によって機械的エネルギーに変換する。
【0058】
図1は、本発明の一実施形態の概略断面図である。ポッド100が、ブレード126、127、128、等を備えた円筒形ロータ122を収容している。これらのブレードは、平らな又は凹状の矩形の平面形態であってもよいし、任意の他の平面形態であってもよい。かくして、風150がノズル入口110に進入してノズル108内を152として流れるとき、ノズルの断面積が最小のノズルスロート114まで収斂し、ここで空気がその最大風速に達する。空気流154は、スロート114の直後に「持ち上がってきた」ブレード128及び空気流154に対して瞬間的に垂直なブレード126に当たる。ブレード126は、空気流154によって押されて右方に移動する、即ち駆動空気流154に対して垂直なロータの回転軸線120を中心として時計廻り方向に回転する。ブレード126、127、128、等が同様にロータシリンダ122にしっかりと取り付けられているため、ロータ122は、そのブレード126、127、128、等とともに時計廻り方向に回転する。ロータブレード126、127、128、等の縁部とシリンダチャンバの壁124、125との間の距離は小さく(数mm)、かくして空気流154、156はこれらのブレードを迂回できず、チャンネル162の内部を流れて開口部129に達するまで、これらのブレードを押して回転する。空気流158は、開口部129のところで、参照符号「E」を付した排気ノズルを通ってロータチャンバを離れ、タービン断面118を流れ160として離れる。ロータブレード126からロータブレード129までの空気流の経路は、空気流がロータブレードに連続した空力学的力を及ぼす時間距離を提供する。ブレードの数を二枚まで減らすと、かくしてこの空気タービンの製造費を低減し、最終的にはこの設計によって発生される電気の費用を低減する。しかしながら、滑らかな作動を維持するためには、即ちロータ122に一定の空力学的トルクを及ぼすためには、四枚乃至八枚のブレードを使用しなければならない。この設計が本発明の主要な特徴である。
【0059】
ポッド100は、自由空気中に屹立した垂直ウィング194を備えている。かくして垂直ウィング194と整合していない風がウィングに空力学的力を及ぼし、この力により、ポッド100を、取り付けコラム134に通したその垂直軸線145を中心として、ポッドの入口110が来入風150に面するように回転する。
【0060】
ポッドコラム134は、ストップ133及び導入コーン135を備えている。これらは、両方とも、ポッドコラム134にしっかりと取り付けられており、コラム134をパイプ140内に整合するのを補助する。パイプ140は、作動のため、即ち風で電気を発生するためにポッド100が取り付けられるタワーである。コラム134をパイプ140に挿入した後、ストップ133がその対応する部品141に当たったとき、パイプ140内へのコラム134の下方への移動を停止する。ストップ133及び対応部品141は、両方とも、同じ平らな形状、好ましくは円形の平面形態を有する。ストップ133が対応部品141に載止したとき、C字形断面形状を持つロック142を下側の部品141にしっかりと(好ましくはボルトによって)設置し、ストップ133及びポッド100全体を、軸線145を中心として、来入風に向かって回転させることができるが、上方に動かないようにし、かくしてタービンポッドをその支持コラム140上に設置された状態に保持する。ポッドをパイプ140に取り付けるシステム130が本発明の別の特徴である。
【0061】
フック109がポッドの対称平面に、重心の上方に正確に取り付けられている。かくして、クレーンでポッド100をコラム140に設置するとき、コラム134は水平方向に対して垂直であり、コラム140と平行であり、かくしてコーン135をコラム140の開放した頂部と容易に整合させることができ、タービンをその作動位置に容易に設置できる。このフック及びその位置が本発明の別の特徴である。スロートのところでのマッハ数(M)が1.0を越える、即ち音速を発生する極めて高速の風用に随意の追加の空気通路を設ける。このような場合には、ノズル108に設けられた、風速計測装置を組み込んだ随意の制御システムがこの空気通路を開放し、余分の空気流を、ノズルから、スロート区分114のところで、騒音やがたを生じるM=1.0を越えることなく、この通路を通して出す。
【0062】
本発明の空気タービンは、比較的ぴったりとした容器内で作動するため、ノズル又はロータチャンバ内に溜まった雨水を除去するために水ドレンシステムを必要とする。更に、ノズルに進入する空気が低温である(下文に示す数値例を参照されたい)ため、水蒸気が液化して水になってしまう。水を空気タービンからドレンするため、水コレクタ167を追加する。この水コレクタ167は、収束ノズルから水を集め、これをパイプ131に移送する。更に、ドレン穴及びパイプ168がロータチャンバから水を集める。乾燥した地域では、この水を何らかの用途に当てることができる。これは、こうした水が清浄な飲用水であるためである。雲が存在する地域、即ち山や高いタワーの頂部にタービンを配置した場合には、大量の水を発生でき、こうした水を、後に使用するために蓄える。水収集−ドレンシステムは、本発明の別の実施形態である。
【0063】
図1のロータ設計は、チャンバ壁とブレードの縁部との間の距離が約1mm又は2mmであるために空気流がブレードを迂回できないため、高い効率をもたらす。この際、ブレードの翼幅又は弦は、約30cm又はそれ以上である。この形状により、空気流はブレードを迂回できず、ブレードを押さなければならず、その結果、ブレードの速度を空気流の速度にすることによって、空気の運動エネルギーの大部分がブレードに伝達される。ブレードは、簡単な平らな薄板金又は他の材料であってもよく、かくしてこのブレードの製造費を引き下げる。他方、凹状のブレードは、空力学的効率並びに構造的強度を更に向上する。かくして図1のブレードは、凹状設計であってもよい。この設計のロータブレードは、プロペラを使用する空気タービンと比べるとかなり小さい。空力学的に効率的なプロペラの翼幅は、プロペラの弦の少なくとも約10倍の長さを備えていなければならない。かくして、2MWの機械について、各ブレードの長さは40mであり、重量は約11tにのぼる!このブレードは、その回転時にかなりの遠心力を発生し、これによりブレードがそのシャフトから破断してしまう場合がある。これは、以下の式で表される遠心力がブレードに作用するためである。
【数3】
ここで、ωは、回転速度であり、
Rは、プロペラブレードの質量要素の局所的半径であり、
dmは、プロペラブレードの微分質量要素である。
【0064】
ブレードの回転速度が上昇するに従って、ブレードのシャフトに作用する更に大きな遠心力を発生する。このため、プロペラをベースとした空気タービンは、高速の風で停止しなければならないのである。本発明では、ブレードの翼幅が短く、ブレードの質量が小さく、かくしてロータアッセンブリ全体が小型で軽量であるため、ロータ及びロータブレードに作用する遠心力はプロペラ型風力タービンよりも遥かに小さい。従って、本願の実施形態は、ロータ構造を高度に強化する必要なしに、遥かに高い速度で回転できる。
【0065】
従って、ロータの重量が小さいため、ロータの慣性回転モーメントが低く、これにより、空気流によって回転を開始するのが現在の風タービンよりも遥かに容易である。
【0066】
ロータの回転速度は、高い出力電力を得る上で重要な要因である。これは、電力が、力に速度を直接乗じた値に等しい、即ちP=F×Vであるためである。
【0067】
更に、この実施形態では、ロータブレードに作用する空力学的力は、「揚力」及び「抗力」の組み合わせである。この実施形態では、ブレードに対して垂直な空力学的力の組み合わせ効果に関心があるため、失速という用語には意味がない。従って、揚力及び抗力は、ブレードの主面に対して垂直な力を増大するという同じ目的で役立ち、力のこの組み合わせにより、力を更に安定させる。従って、このロータの実施形態に関し、空力学的力を抗力と考える。この実施形態についての抗力係数は、正方形のブレードに通常の流れがぶつかる場合には、1.0乃至2.0である。かくして空力学的抗力に基づく設計が本発明の別の特徴である。
【0068】
航空機の翼並びにプロペラブレードでは、翼は、NACA65シリーズ等の翼輪郭から幾何学的に形成される。各翼輪郭は、前縁及び後縁を結ぶ線と定義される弦を有する。この実施形態では、翼は、ブレードが輪郭領域全体に亘ってハブに連結されたプロペラブレードやターボジェットの軸流タービンとは異なり、その輪郭の後縁領域によってロータハブに取り付けられている。かくして、軽量のロータブレードが輪郭の後縁領域に亘ってハブに連結されており、閉鎖チャンバ内の空気流路に沿って空気流に従って移動するロータ設計は、本発明の別の特徴である。
【0069】
収束ノズル108が本発明の主要な特徴である。ノズルの断面積は、スロート114に向かって徐々に減少し、スロート114のところでノズルの断面積が最小になり、かくして空気流152を強制的に加速し、即ち空気の内部エネルギーを運動エネルギーに変換する。
【0070】
乱流による運動エネルギーの損失を最小にするため、及びノズル内の静圧が上昇しないようにするため、入口108にはガイドベーン112が設けられている。これらのガイドベーン112は、空気流を互いに「平行」な流線をなして全体にノズル壁の方向に強制的に流す、平らで薄いエレメント(金属、プラスチック、又はカーボンファイバやガラスファイバ等の複合材料で形成されている)である。その結果、ガイドベーンを離れる空気流は、スロート114に向かって同じ速度で、互いに混じり合うことなくできるだけ滑らかに、スロート114のところでのノズル壁と平行に且つロータブレード126に対して垂直に流れる。矢印154がこの流れを示す。ノズル内での乱流及び静圧の上昇を抑えるガイドベーンを組み込んだ収束ノズル設計が、本発明の別の特徴である。
【0071】
スロート114の断面積が入口断面110の約1/10であるため、空気流の速度150を自然の風と比較して約10倍に上昇すると同時に、その運動エネルギーが約100倍増大する。ノズルの長さ及び形状は、効率と重量との間の配慮の交換条件である。これは、ノズルが長ければ長い程、乱流及び圧力上昇を阻止する上で優れているためである。乱流及び圧力上昇を阻止することは、等エントロピー流れを得る上で、及びできるだけ大量の空気を移送すると同時に入口での漏れを最少にする上で重要である。空気流の内部エネルギーを運動エネルギーに変換する収束ノズルは、本発明の主要な特徴である。
【0072】
運動エネルギーのこの高いゲインを提供するため、入口からスロートまでのノズルに沿った空気のパラメータを計算する。
入口断面110での空気流のパラメータ:
A1=10m2 、110での断面積、
V1=21.737ft/s、110での風速(この値は、後の数値計算を容易にするために選択した値であるということに着目されたい。)
ρ1=0.002378slug/ft3 、110での空気の密度(海面の高さでの標準大気の圧力の値)、
T1=32 oF、110での空気の温度(冬季の平均的な気温)。
【0073】
空気流がタービンブレード128及び126に当たる、スロート114での同じパラメータを知る必要がある。即ち、
A2=1m2 、110での断面積(設計によって与えられる)、
V2=?、114での風速、
ρ2=?、114での空気の密度、
T2=110での空気の温度、
γ=1.4、1000 oRの空気についてのCp/Cvの比。
【0074】
解:以下の方程式を使用する。
1)
【数4】
区分114ではT、Vは未知数である。
エネルギー保存;参考図書の第140頁の方程式24、即ち本願の式2を参照されたい。
2)
【数5】
区分114ではT、p、ρは未知数である。
理想気体の状態方程式;参考図書の第130頁の方程式2を参照されたい。
3)
【数6】
区分114ではρ、Vは未知数である。
連続性の方程式;参考図書の第155頁の方程式22を参照されたい。
4)
【数7】
区分114ではT、ρは未知数である。
断熱可逆流れ;参考図書の第142頁の方程式29を参照されたい。
(区分114でのTo及びρoは、断熱流れについて、区分110での値と同じであり、方程式1及び4を使用して所与のパラメータで計算できる。)
【0075】
区分114での空気流のパラメータである四つの未知数V、T、p、及びρがある。この方程式の組を解くには、最終的に試行錯誤の方法を必要とする。これは、4番目の方程式即ち上記式7のためである。参考図書の第152頁乃至第159頁には別の式が記載されている。空気流の速度Vの代わりにマッハ数の定義を使用して一般解が説明されている。これらの解は、参考図書の第153頁の第4図及びこの参考図書の表2に示されている。
【表1】
【0076】
参考図書での議論は、「ラバル管」と名付けられた収束−発散ノズルについて続けられる。第156頁乃至第159頁を参照されたい。ここでは、解は、局所的マッハ数=1.0のクリティカル領域A* の定義を使用して与えられる(第157頁L.2参照)。流れパラメータは、第157頁の方程式26及び27、及び第158頁の図7及び図8で与えられる。項A* /Aは空気流のパラメータを計算する上で非常に助けとなる。これは、表2に含まれる。
【0077】
収束ノズルにおける流れパラメータの解法は、以下の方法に従って行われる。
【0078】
ステップ1:区分110について特定されたマッハ数について、比A* /Aを計算する。空気流がマッハ1.0、即ち音速に達する場所の収束ノズルの断面積A* を計算する。音速がTの関数であることに着目されたい。
【数8】
従って、区分110でのマッハ数を計算する。
区分110での音速は、
【数9】
区分110でのマッハ数は、M=V/a=21.737/1086.87=0.02である。
この値について、表2では、
A* /A]S110=0.03455
∴ A* /10=0.03455
∴ A* =0.3455m2 を得る。
【0079】
ステップ2:区分114でのマッハ数を計算する。
A* がわかっており、A]S114=1.0m2 である場合には、区分114についてのA* /Aは、A* /A=0.3455/1.0である。この値は、表2において、M=.0205、即ちM=0.2とM=0.21との間の値である。
(注:To は、区分110について、上掲の方程式1から直接計算される。)
T/To =0.9921
T]S114=To ×0.9921=492.03937×0.9921=488.15 oR∴T]S114=488.15 oR
このことは、区分114の空気は、ノズル入口110に進入する空気(492 oR)よりも低温であるということを意味する。この空気流の温度低下は、本発明の重要な特徴である。これは、本発明による収束ノズルが吸い込んだ雲から水を得るのに使用できるためである。
【0080】
ステップ3:区分114での音速を計算する。
【数10】
【0081】
ステップ4:区分114での空気流の速度を計算する。
【数11】
【0082】
かくして、スロート114での空気の速度は、221.9ft/sである。従って、
221.9/21.737=10.2
即ち、区分110での空気流の速度よりも10.2倍速い。従って、区分110と比較して104倍の運動エネルギーを持つ空気流を得る。運動エネルギーのこの大幅な増大が、本発明の主要な特徴である。ノズル内の空気流に外部からエネルギーが全く加えられないため、区分110の空気流の内部エネルギーの幾分か、即ち、
【数12】
が運動エネルギーに変換される。即ち、
【数13】
これは、本発明の主要な特徴である。
【0083】
区分114での密度、圧力、及び温度は、方程式4からρo を計算し、方程式2からpo を計算した後、M=0.205についての表の値から容易に計算できるということに着目されたい。
【0084】
収束ノズルについての以上の計算は、「断面又は平行な流線間の変化率が小さい」ということに基づくということに着目されたい。参考図書の第154頁を参照されたい。従って、理想的なノズルからの幾らかの逸脱により、ノズルが、「断面の変化率が小さい」状態から外れ、大きくなる場合が予想される。しかしながら、全ての場合において、ρVA=一定という連続性の方程式に従う。この方程式は、空気流がノズルに進入した後の定常状態の空気流の加速を述べており、区分110では、定常状態の速度を有する。
【0085】
これは、エネルギーの方程式24を使用してチェックできる。
【数14】
【0086】
数値間に僅かな相違があるけれども、これらの間の比は0.99956であり、これは、表に示すパラメータの数値を丸めたパラメータを使用し、マッハ数について内挿を使用することによる不正確性に留意すると、工業的目的について優れた精度である。
【数15】
【0087】
かくして、Tの差は、約0.2 oRであり、これは無視できる誤差である。
【0088】
かくして、面積比が1/10の収束ノズルを使用すると、21.737ft/sの自然の風速は、221.9ft/sに上昇し、単位質量当たりの自然の風の運動エネルギーは、21.7372 /2=236.25から、221.92 /2=24619.8に増大する。この運動エネルギーの増大は空気の温度の低下によるものであり、104倍である。内部エネルギーの運動エネルギーへのこの変換は、本発明の主要な特徴である。この収束ノズルを使用することにより、入口の1/10の小さな面積に集中する高速の空気流が得られ、収束ノズルによって空気流が拘束されるため、必要とされるタービンブレードは小型で軽量であり、空気の運動エネルギーを機械的エネルギーに変換する上で遥かに効率的である。
【0089】
図1は、これを達成する一つの実施形態を示す。入口断面からスロート断面114までのノズルの長さは、ノズルの重量を低減するため、及び台風のときでも立っており且つ作動できるように所与の質量構造についてのノズルの剛性を向上するため、できるだけ短くなければならない。しかしながら、収束ノズルは、等エントロピー流を確保し且つ入口での漏れを最少にする上で十分に長くなければならない。これらの相反する必要条件を満たすため、ガイドベーンを使用する。ガイドベーン112は、ノズル108を四つの独立した先細の副ノズルに分割する。各副ノズルの入口−出口面積比は、乱流の発生を阻止するため、各副ノズルから出る流れの速度が等しいように、1/10である。各副ノズルは、主ノズルよりも遥かに狭幅であるということに着目されたい。副ノズルの所望の数は選択事項である。これは、副ノズルを追加すると、抗力、重量、複雑さ、及び費用が大きくなるためである。これらは全て、望ましからぬことである。ノズル、特に短い収束ノズルでガイドベーンを使用することは、本発明の別の重要な特徴である。
【0090】
本発明を効率的にするため、収束ノズルの内部の静空気圧が、上流、即ち入口110での静圧よりも低くなければならないということに着目されるべきである。これは、空気を、収束ノズルを通して等エントロピー流をなして加速する場合である。発電機に連結されたタービンがスロートのところに、又はスロートの僅かに後方に配置されるため、タービンは、特に高出力発電機の場合、流れに対して空力学的抵抗を発生する。この始動時の問題点を解決するため、空気をノズルから吸い込み、定常状態の空気流をノズル内に発生するのを補助するタービンの初期回転速度を与えるため、随意の「始動」手順を使用できる。発電機が電動モータとして作用し、これに連結されたタービンを回転するように、発電機を外部電源に接続する。この始動プロセスは、風が存在する場合に行わなければならない。このような外部電源は、バッテリー又は電気グリッドである。発電機は、風力タービンが電気を発生しているときにこのバッテリーを充電し、バッテリーは、始動時に電流を提供する。始動プロセスに要する時間は短く、約1分程度であり、次いで、始動プロセスを停止し、定常状態の空気流の空気がタービンブレードをそれ自体の力で駆動できるようにする。この始動プロセスは、本発明の別の特徴である。
【0091】
始動手順を開始するため、多くの構成を形成できる。例えば、風力タービンに設置された動作センサが電気信号を発生し、この信号を、バッテリーによって電力が提供された増幅器回路で増幅し、リレーを切り換え、これによりバッテリーを発電機にタイマーを介して接続する。タイマーは、電流をモータ/発電機に伝達し、所定の数秒が経過した後、モータへの電力を切る。
【0092】
別の構成は、何らかの空気流を実際に感知するため、ノズル内部又は外部にピトー管を組み込むことである。ピトー管に進入する空気流によるピトー管内部の圧力上昇を、アナログ又はデジタルの電気信号に変換し、この信号がシステム230に到達し、制御システムをトリガーし、空気流タービンのロータに連結された電動モータにバッテリーの端子を接続することによって、スターターシステムを作動する。タービンの始動後、制御システムは、少なくとも5分又はそれ以上に亘って別の始動を開始することができない。これは、始動プロセスで空気タービンが発生する空気流でなく、自然の風だけで始動を開始できるようにするためである。制御システムは、CPU(中央演算処理ユニット)、及びコンピュータプログラムを記憶したメモリー装置に基づくシステムである。このコンピュータプログラムは、風力タービンの状態を監視し、ピトー管からの最少自然風速データの有無に応じて始動プロセスを開始する時期を「決定」するプログラムである。更に、表2のデータ並びに大気のデータをメモリー装置に記憶できる。このデータは、追加の空気通路161を制御する上で必要である。図3に関する追加の詳細、又は本発明の他の実施形態の他の特徴を参照されたい。タービンを始動するため、所定の時期に又は所定の時間間隔でタービンの回転を開始する予めプログラムしたタイマー、遠隔制御装置からの作動指令、又は場合によっては人間の手による指令等の他の方法を適用して電気スイッチを作動し、本発明による家庭用風力タービンを作動してもよい。
【0093】
本発明の大きな利点は、低い風速でも大量のエネルギーを発生できるということ、及び大きさがコンパクトであるということである。そのため、こうした装置は、全てのビルディングの屋根に容易に設置できる。例えば、図1による入口直径が1mの収束ノズルの電力出力を計算できる。
【0094】
風速を21.737ft/s、即ち6.6m/sと仮定する。これは非常に一般的な弱い風であり、スロート114のところで221.9ft/sの風速を発生する。速度が221.9ft/sのスロート空気流54に対して一時的に垂直なブレード126に作用する空力学的力を計算する。
【0095】
予め計算したスロートのデータを使用する。本明細書中の表2及びそれに続く記載を参照されたい。内挿した比ρ/ρo=0.9793を使用し、スロートでの空気の密度を計算する。
ρ=ρo×0.9793=0.002378×0.9793=0.0023288
【数16】
ここで、Sは、ブレード126の面積であり、CD=1.0は、ブレード126(区分114)の抗力係数である。
【0096】
タービンブレードが、空気流をノズルのスロート内にとどめるため、タービン負荷がある場合の空気流の速度と比較した、スロートでの空気流の速度低下を30%と仮定する。即ち、空気流の速度は、221.9×0.7=155.3ft/sである。
【数17】
及び電力は、
【数18】
【0097】
次に、タービン負荷がない場合の、スロートでの空気流のエネルギーを計算する。
【数19】
【0098】
従って、この風力タービンが14.5kWのうちの5kWを発生するということを示す上述の電力出力の計算は、非常に控えめであり、実際の電力出力は、7kWにのぼる。
【0099】
この5.0kWの出力電力は、西欧諸国の平均的な家庭にとって十分である。6.6m/sの軽微な風でこの出力が発生することから、更に強い風では、この数値の2倍又はそれ以上の出力が発生する。
【0100】
この風力タービンは、長さが約2.5mであるため、この大きさにより、各都市の数千もの家庭のため、このような風力タービンを、都市の全てのビルディングの屋根に設置できる。本発明を採用すると、国の大量の電気を節約でき、汚染が減少し、多くの家庭が彼等自身で電力を発生することにより、生活費を減少する方法を提供する。当然のことながら、風速が高いと、このような風力タービンの所有者は、地方の電力会社に電気を販売できる。
【0101】
図2は、図1の空気タービンの正面図を示す。参照番号を付した全てのエレメントは、図1におけるのと同じ参照番号を備えている。この図は、全ての流れを取り扱うため、ガイドベーン112がノズルの幅に亘って延びていることを示す。ガイドベーン112の翼幅は、図3に明らかに示してある。ガイドベーンの寸法は、空気を加熱することになる運動エネルギーの損失を最少にするように定められる。横方向乱流による乱流作用をなくすため、垂直ガイドベーン(この図には示さず)を追加してもよい。
【0102】
図3は、図1の空気タービンの平断面図である。参照番号を付した全てのエレメントには、図1に示してないものを除くと、図1におけるのと同じ参照番号が付してある。ロータの主シャフト120は、そのブレード127(図面を読み易くするため、残りのブレードは示してない)に及ぼされた空力学的力により回転する。シャフト120はプーリ170を有し、このプーリは駆動ベルト173と係合し、このベルトがプーリ170よりも小径のプーリ171を回転し、かくして、プーリ171は、発電機175を駆動するのに十分に高い回転速度で回転し、この発電機が機械的エネルギーを電気エネルギーに変換する。電流の形態の電気エネルギーは、電線(図示せず)によって発電機の外に伝達される。
【0103】
随意の追加の空気排出システム160−163の役割は、風速が最大300km/時に及ぶ台風に対し、この設計が対処することである。台風の空気の速度を10倍にすると、マッハ=1.0を越えてしまう。ノズル内で衝撃波が発生しないようにするため、空気通路160を開放し、かくしてスロートの面積を増大し、これによってスロート114での空気の速度を低下し、マッハ=1.0以下に保つ。余分の空気通路を組み込むことが、本発明の別の特徴である。スロートでのよどみ圧を計測するピトー管等の風速計測装置236と一体化した制御システム230及びアナログ−デジタルコンバータ(図示せず)が、この圧力を電気信号に変換し、この信号がライン238を通って制御システムのCPUに提供される。CPUは、スロートでの空気流の速度を監視するコンピュータプログラムを作動し、この速度がM=1を越えたとき、遠隔制御式電動アクチュエータ162及びそのアーム163によって電動式ドア161を開放する。制御システムのメモリー装置に記憶された空力学的データ(参考図書の表2等)は、制御システムが本願の他の実施形態の様々な仕事を行う上で役立つ。マッハ数がマッハ=1.0に向かって上昇するとき、制御システムは電動アクチュエータ(航空機産業で一般的な装置)に電気信号を送出し、このアクチュエータが剛性アーム163を押してドア161を開け、かくしてスロートの前方の空気の幾分かを通路160を通して流出させることができ、スロートでの空気流はM=1を越えず、かくして、衝撃波、騒音、及び振動をなくす。かくして、この随意の空気通路により、この風力タービンは、破壊的自然現象から幾分かのエネルギーを利用するため、強い風で作動する。余分の空気排出システムを組み込むことが、本発明の別の特徴である。
【0104】
図4は、本発明の別の実施形態の側断面図である。この図は、入口が平面的であり、空気がロータブレードに抗力を及ぼす空気経路が長く、かくして大きな効率が得られる。図1の設計の全ての他の特徴は、ここに、及び本願の任意の他の実施形態に含まれていてもよい。図4、図5、図6でエレメントに付した参照番号は、基本的には、図1、図2、及び図3で用いたものと同じである。
【0105】
図5は、図4の空気タービンの正面図を示す。この実施形態は、平面的な空気入口を有する。これにより、入口は、大きな入口面積を持つことができると同時に、タービンロータの直径を小さくできる。これは、遠心力を小さくしておく上で重要であり、及び従って、構造を軽量にし且つ安価にする上で重要である。他方、高出力風力タービンは大きな入口を必要とし、自然の景観に大きな影響を及ぼす。しかしながら、この実施形態は、設計の高さを低くし、良好な外観を提供する。入口面積が大きいということは、更に多くの電気を発生するということを意味する。
【0106】
図6は、図4の実施形態の平面図である。この実施形態では、ロータブレード127の翼幅は、図1又は図4でわかるように、ブレードの半径、即ち弦−ブレードの長さの約5倍乃至10倍大きい。
【0107】
図7は、本発明の別の実施形態である。この実施形態は、ロータ設計が図1及び図4と同様であるが、ノズルの断面積が可変である。入口が可変であることによる利点は、空気流がスロート114のところでマッハ=1に達しないようにすることにある。可変の入口は、風速が上昇するとき、流れを絞ると同時に入口に全ての大きな力を作用する。空気タービンのこの実施形態について、ロータブレードの大きさは固定されており、その最大風速はM=1.0である。従って、電力出力を最適化するため、入口の面積を風速に適合させなければならない。風速が低いと、入口面積を増大する必要があるのに対し、高速の風では入口面積を減少する。ノズルの断面を変化するため、実施形態は、2つの平らな表面を有する。これらの表面は、両方とも、ヒンジ260を有し、かくしてヒンジ260の軸線を中心として回転できる。入口断面積110を変化するため、二つの随意の機構を説明する。第1の機構は、風速が上昇するに従って、上向きの揚力が増大するウィング250である。ウィング250に作用する揚力が大きくなると、ウィングに取り付けられたアーム252がシリンダ256を中心として回転し、移動自在の平らな表面108に力を下方に及ぼし、この平らな表面108がヒンジ軸線260を中心として回転し、かくして表面108の前縁(来入風と最初に出会う線)を下方に回転し、入口断面積110を減少する。
【0108】
別の選択肢は、電子式制御システム230によってノズル面積を変化することである。この制御システムは、図1の余分の空気通路160に関して説明した。ここでは、CPUがスロート114のところでの空気流の速度を監視し、入口面積を変化し、タービンに負荷を加える空気流の速度をできるだけマッハ=1又は任意の他の設計値に維持する。電動アクチュエータ270を作動し、アーム272を左方に押し、ブラケット276を左方に押すことによって、下側の平らな表面108を押し、これによって平らな表面108をヒンジ軸線260を中心として回転し、かくして入口断面積110を減少する。入口面積を拡大するためには、アクチュエータのアーム272をそのシリンダ270内に引っ込める。図7の全ての他のエレメントには、図1におけるのと同じ参照番号が付してある。可変の入口面積及び自動制御システムが本発明の追加の特徴である。制御システムは、電話線又は無線通信のいずれかによる遠距離通信によって、遠方の制御システムから監視できるということに着目されたい。この特徴を可能にするため、セルラーモデム及びアンテナが制御システムのCPUと一体化してある。
【0109】
図8は、図7の空気タービンの正面図である。空気速度計測装置236(ピトー管)の位置に着目されたい。ピトー管は、スロート平面114の後方のチャンバの底部に配置されている。チャンバ壁は、流れ112が平行な流線を持つようにするため、平行である。
【0110】
図9は、図7の実施形態の平断面図である。垂直ガイドベーン116が示してあるチャンバ220内の流れは、平行な線をなして流れるように構成されている。
【0111】
図10は、本発明の別の実施形態のポッド100の中心線に沿った垂直平面での断面図である。上述の実施形態におけるのと同様に、収束ノズルがこの実施形態の重要な部分である。この実施形態では、ロータは約12枚のウィングを有し、これらのウィングの断面、734、736、738及び730は、図11に明瞭に示す二つの平行な回転自在の「リング」820、850間に設置されている。各ウィングの側部のチップ側縁部は、リング820、850の一方にしっかりと連結されており、かくして、ウィングが軸線880を中心として移動するとき、両リングはこれらのウィングとともに回転する。上述のロータ設計と異なり、ウィングの後縁はロータハブに取り付けられておらず、かくして、来入流は、これらのウィングに、航空機の翼と作用するのと同様に作用する。リングは、上述の実施形態におけるのと同様に、入口に進入する流れに対して垂直な図11に示す軸線880を中心として回転する。図10に示す円740は、回転リング820、850の内輪郭である。これは図11で明瞭にわかる。ガイドベーン716は、図示のように設置されており、これらのガイドベーンは、それらの側部のチップがステータリング840、846に取り付けられている。これらのガイドベーンは、回転自在のウィング734、735、736、737の後縁を離れる流れの方向を変え、リング820、850の右側のウィング、即ちウィング738、739に向かって流し、これらのウィングを時計廻り方向に更に押し、流れがロータ領域を離れる前に流れから更に多くの運動エネルギーを取り出す。ウィング736は、瞬間的に、流れ152に対して垂直である。静ガイドベーン717、718は、ノズル108の幅に亘って延びている。これらのガイドベーンは、流れ(矢印720で示す)を、最適の迎え角でウィング734に当たるように、即ち各ウィングがその瞬間的位置で回転軸線880を中心として最大のトルクを発生するように差し向ける。各ウィングのトルクは、結果的に作用する瞬間的な力と回転軸線880との間の距離を乗じた、揚力成分及び抗力成分を含む。リング820の中心で、静ガイドベーン717及び718が、ウィング736の位置での来入流152に垂直なノズル断面であるノズルのスロートを横切って延びている。スロートは、ノズル側壁によって形成される。これは、図11でわかる。実際には、これらの側壁は、右側の「リング」820及び840の平らな面及び左側の「リング」850及び846の平らな面である。スロートの上壁は、ノズル108の上壁の延長部であり、下壁は静本体718の上面である。この本体は、空気流が下側のウィング730、732にマイナスのトルクを発生しないようにする。
【0112】
この実施形態のウィングは、自由流中のプロペラよりも大きな利点を有する。これは、ウィングの外チップがリング820、850に面し、これらのリングが壁として役立ち、ウィングの先端が渦を生じないようにするためである。かくして、1乃至5の範囲の低いアスペクト比で高効率のウィングが得られる。通常、プロペラブレードのアスペクト比は、ウィング先端の渦による揚力損が生じないようにするため、約10又はそれ以上である。別の利点は、一方の側だけが支持されるプロペラブレードとは異なり、各ウィングの両側が支持されるということである。これによりウィングの剛性が大幅に向上する。この設計の更に別の利点は、回転半径が小さいということである。これにより、ロータに作用する遠心力が減少し、かくしてその重量及び費用が小さくなる。
【0113】
この実施形態の別の利点は、抗力がタービン駆動トルクに主に寄与するということである。これは、ウィング735、736、737、738についてわかる。
【0114】
この実施形態の別の利点は、スロートが塞がれておらず、そのため空気流をノズル内に発生でき、その結果、始動の必要性が本願の上述の実施形態と比較して小さいということである。
【0115】
図10に示すウィングの断面は、従来の航空機の輪郭を備えているけれども、この設計にこの他の輪郭を使用してもよい。例えば、キャンバが高い(凹状形状の)輪郭を持つウィング、又は対称をなして凹状をなし、前縁及び後縁に丸みを付けた断面を持つウィング等を使用してもよい。
【0116】
図10のガイドベーン710、712、714は、図1におけるようにノズルの全長に沿って延びていないが、図1のベーンをこの実施形態及び任意の収束ノズルに適用できる。このロータの実施形態は、本願の任意のノズルと組み合わせて使用できる。
【0117】
図11は、図10の実施形態の正面/断面図である。長円形810は、ノズルステーションのスロートでの流れ152に対して垂直な断面である。ノズル自体は、その隅部の点A、B、C、及びDによって描かれているように、矩形である。ウィング736がスロートの頂部にあることが明らかにわかる。ウィングの側部のチップは、ステータの右側でリング820に連結されており、その左側チップがリング850に連結されている。ロータ機構は、この図では対称であり、従って、右側だけを説明する。リング820は中空のディスクであり、垂直な円筒形延長部821を備えている。この延長部は、ベアリング824上に「着座」している。ベアリング824の回転軸線は880である。ディスク820は、剛性で丈夫な鋼等の任意の材料で形成されている。
【0118】
肩部822がベアリング824の左方への移動を制限するということに着目されたい。ベアリング824は、静パイプ841に「着座」している。この静パイプ841の対称軸線は、ロータの軸線880と一致する。好ましくは金属製のディスク842、843、及び844は、パイプ841をステータディスク840及び構造壁814に連結する上で役立つ。ステータディスク840は、対応する左ステータディスク846と対称である。ガイドベーン711及び712は、スロート幅に亘って延びている。即ちステータディスク840と、846との間を延びている。各ガイドベーンの側縁部は、ステータディスク840及び846のいずれかに連結されている。回転ウィング、ロータの中心の静ガイドベーン、及び高速空気流が逆の位置にあるウィングに向かって流れないようにする本体を持つこのロータ設計が、本発明の追加の特徴である。
【0119】
図12は、円形断面の収束ノズルのスロート領域に組み込んだ、空気タービンの別の実施形態である。これは軸流タービンであり、従って、図12に示すほとんどのエレメントは、二つの代表的なエレメントを示す図14からわかるように、半径方向で対称である。図1、図7、及び図10におけるように、仮想線101は、ノズルの外殻であり、仮想線108は、ノズルの内殻である。これは、収束ノズルへの取り付けが容易な構成を備えた軸流タービンである。
【0120】
この新規な設計には幾つかの利点がある。第1の利点は、タービンをそのノズルから取り外す手順が容易であるため、保守性が良好であるということである。タービンは、定期的保守を必要とする可動部品を含む機械である。収束ノズルには可動部品がなく、従って、必要される保守が少ない。かくして、保守作業を容易にするため、タービンユニットを取り外して保守工場に持っていくことを容易に行うことができ、作動位置に残っている収束ノズルに交換ユニットを容易に取り付けることができる。ユニットは、ターボジェットエンジンと非常に似た構造を備えている。内部フレーム904、外殻901、及び内殻908を持つポッド900を備えている。ガイドベーン920は、軸線980に対して半径方向で対称であり、包囲コーン924は360°をなしており、来入空気流912を、ノズル出口を離れて区分910に進入した後、タービンスロート領域914に向かって差し向ける。空気流912は、スロートのところでその最大速度に達し、回転ハブ960を取り囲んでいるがこのハブと接触していない「ノズル」として既知の、複数のガイドベーン930を含むステータベーン930の第1列に到達する(図14のステータディスク9300を参照されたい)。静ガイドベーン930は、図12でわかるように、側方から見て矩形であり、図13及び図14でわかる断面輪郭932を有する。ガイドベーン930は、軸線980に対して垂直な同じ平面内に配置された複数の同じこのようなベーンのうちの一つであり、一緒になって、図14のタービン第1段ステータ9300を形成する。エレメント934は、同じ種類の例示のロータブレード940と隣接して配置されたこの複数のエレメントの例である。ロータハブ960は、そのシャフト906にしっかりと取り付けられている。このシャフト906は、ベアリング956、957、及びバー950、951を介してポッドの外構造フレーム904、905、906によって支持されている。これらのバーは、半径方向では対称ではないけれども、四つのアームの各々が対称をなして十字形を形成するように配置されており、更に、これらのアームの各々は、空気流中で静止しているときの空力学的抗力を最小にするため、翼状輪郭断面(図13参照)を備えている。
【0121】
これらのバーは、ハブ960に作用する長さ方向力及び側方力に耐えることができるということに着目されたい。ベアリング956、957により、ハブ960は、その長さ方向軸線980を中心として自由に回転できる。ロータディスク9400(図13及び図14参照)は、複数のブレード940を支持する。これらのブレード940は、図14でわかるように、ハブ960の周囲に配置されている。
【0122】
ステータブレードアレイ934及びその隣接したロータブレードアレイ944は、ここでは、空気流がステータベーン930からロータベーン940までどのように移動するのかを説明するために示してある。ステータブレード930は、ロータブレードを矢印990の方向に押す、即ち軸線980を中心として回転させる空力学的力を最大にするように、流れ913を、区分輪郭944アレイに向かって最良の迎え角で差し向ける。流れ913は、ロータ輪郭と出会うときの迎え角が最良であるように、ステータ輪郭によってその方向を変える。流れから運動エネルギーの大部分を取り出す上で、バナナ形状のロータ輪郭が有用である。流れがステータ区分及びロータ区分を蛇行して移動することにより、ロータを990方向(軸線980を中心として)に回転し、最終的には、長さ方向速度成分が小さく且つ接線方向速度成分が小さい流れ918として離れる。
【0123】
ロータブレード区分942は、対称で高キャンバの空力学的輪郭を備えている。これは、駆動流からできるだけ多くの運動エネルギーを取り出す上で重要である。断面932、942を夫々備えたステータディスク(ノズル)930及びロータディスク940のこの構成は、「インパルスタービン」として既知である。インパルスタービンは、流れから取り出されるエネルギーを最大にするように設計されている。各タービン段の、流れからエネルギーを取り出す性能に限界があるため、随意の追加のインパルス段タービン938、948を設計に追加する。
【0124】
シャフト906は、発電機970−972、及び後縁コーン975を支持する。かくして、シャフト906が回転するとき、発電機のロータ972も回転するが、発電機のステータ970は、バー950と同様のバー952によって支持されているため、静止したままである。電力は、支持体952に通した電線によって伝達される。
【0125】
タービンポッドフレーム904は、タービン発電機ユニットの重心のところに配置されており、かくして、フレーム904に取り付けられた支持フック109は、重心のところに配置される。フック109を使用してユニットを吊り上げるとき、ユニットはほぼ水平な姿勢をとり、収束ノズルの後部入口への導入を容易にする。ユニットがその位置にきた後、ボルトをノズルフレーム104を通してタービンフレーム902、903、904、905に打ち込み、タービンを収束ノズルにしっかりと取り付ける。タービンの後部コーンには、タービンユニットをそのノズルから引っ張るのを助けるための穴907が設けられている。
【0126】
図13は、タービンの主要部品の組み立て方法を示す。コーン924をシャフト906に連結した後、アーム950をベアリング956に取り付け、このベアリングをシャフト906に装着する。次いで、ハブディスク960を、好ましくはスプライン溝によってシャフトにしっかりと連結する。その後、ステータディスク9300をハブ960の周囲に取り付ける。ステータディスクは、静エレメントとなるように、後に、その外部リング938を介してポッドの内殻に連結される。次いで、ロータディスク9400をシャフトに組み込み、シャフトにハブ960としてしっかりと連結する。
【0127】
図14は、ステータディスク9300及びロータディスク9400の平面図である。
【0128】
ターボジェットエンジンと同様に組み立てた軸流タービンユニットを、収束ノズル又は収束−発散ノズルと関連して使用することが、本発明の一つの特徴である。
【0129】
図15は、本発明の別の実施形態を示す側面図である。収束ノズル1000は、タワーとして役立つ垂直パイプ1050に取り付けられている。このタワーは、ケーブル1047、1048、及びベース1068によって地面に固定されている。ケーブル1047、1048に対して垂直な平面で作用する追加の支持ケーブルは図示してない。かくして、高い構造(数100m)が安全に取り付けられる。この設計は、1mから始まって高くなる任意のタワー高に対して良好である。収束ノズル入口1010に進入する空気は、ガイドベーン1020乃至1023によって、パイプの頂部開口部1051内に差し向けられる。空気流は、パイプ内を流れ1014をなして押し下げられ、パイプ1057を通って流れ1016として流れ、任意のタービン内に及び特定的には本明細書中に説明した実施形態に流入する。この実施形態(図15参照)には三つの利点がある。即ち、
1.高速の風を捕らえるため、ノズルが地面から高くに配置されるということ、
2.保守が困難で費用がかかり且つ危険な高いタワーにタービンユニットを設置する必要がないということ、及び
3.収束ノズルの副生物が水であるという利点がある。
【0130】
上文中で与えられた数値解において、自然の空気の温度が4 oR低下することがわかっている。これにより、収束ノズルによって吸い込まれた雲は液化温度に達し、これにより水蒸気が水滴に変化し、これらの水滴が収束ノズルの内側を流れてパイプ1050、1055に入り、このパイプの底部に設けられた小さな穴を通ってパイプ1065に流入し、次いで水リザーバ(図示せず)に集められる。かくして、水が必要とされる乾燥した地域では、この実施形態は高品質の水及び電力を提供できる。ノズルを風に向けるため、垂直ウィング1090が構造1092を通して空力学的力を及ぼし、これによりノズルを風に向かって回転する。このように回転できるようにするため、図1におけるのと同様の機構130−140が使用される。パイプ1050は、パイプ1055内で回転できる。僅かに小径のパイプ1052が、パイプ1055にしっかりと取り付けられており、パイプ1050内に延びている。パイプ1052はシャフトとして役立ち、ウィング1090の力の作用により、パイプ1050がパイプ1052を中心として回転する。ディスク1041はパイプ1050にしっかりと取り付けられており、パイプ1055にしっかりと取り付けられた同様のディスク1042の上に載せてある。その結果、上側のディスク1041は、下側のディスク1042の上で摺動できる。クランプ1045が、その下側から、下側のディスク1042に取り付けられており、かくして、ディスク1041が上方に移動しないようにし、かくして、パイプ1050及びかくしてノズルアッセンブリ全体を、パイプ1050の中心線に沿って延びる垂直軸線を中心として回転できるように、パイプ1055の上に保持する。
【0131】
かくして、空力学的力が垂直ウィング1090に加わったとき、この力が収束ノズルアッセンブリに回転モーメントを発生し、空力学的力がゼロになるまで、即ちウィング1090が風の方向と一直線上に並び、入口1010が来入風に面するまで、ノズルを押して回転させる。
【0132】
図15の実施形態は、水の製造をも目的とする高出力タービンに適している。例えば、21.737ft/sの風速についてのデータを使用して2MW風力タービンの寸法を計算できる。
【数20】
【0133】
従って、ノズルのスロート面積は、
【数21】
でなければならない。従って、ノズルの入口面積は、スロート面積よりも10倍大きくなければならない、即ち107.7m2 、即ち直径10.7mの円形の入口でなければならない。これは、プロペラ式のベスタス(Vestas)V80タービンよりもかなり小さい。従って、このような装置は、高さが約12mであり且つ長さが27mであり、現在のプロペラ式風力タービンの技術よりも重量及び費用がかなり小さくなる。ベスタスV80は、15m/sの風から2MWを発生する。この風は、ここで使用した6.6m/sよりもかなり強い風である。従って、上記タービンの15m/sの風では約8MWを発生する。
【0134】
図15の実施形態は、発電所に適している。大型(入口直径が20m乃至100m)の収束ノズルを使用して数100MWを発生できる。更に、水が必要とされる場合には、地表近くに雲がある山の上にノズルを配置してもよい。かくして、雲を捉えて水にするのに短いパイプで済む。
【0135】
本発明は、空気の内部エネルギーを運動エネルギーに変換することにあるため、ノズル内の空気流を最大可能な速度まで加速し、最大のエネルギーをスロートに通すのが望ましい。この速度は、音速であるか或いはこれよりも僅かに低い速度である。この速度を得るため、収束−発散ノズルを使用しなければならない。数値で示した上掲の場合のように、ノズル出口ステーション110(図1参照)でのマッハ数、及びステーション110とステーション114との間の面積比により、音速が得られるスロート面積を決定する。風速が一定でないため、図16の別の実施形態が提供される。この実施形態では、図7の実施形態とは対照的に、入口面積を一定にしたまま、自動制御システム1230がスロート面積を変化する。ノズル1408は、自然の風1320がノズル1408に進入する入口1410を有する。このノズルは、スロート区分1414と、ステーション1414からステーション1418まで僅かに発散するノズルとを有する。ステーション1418のところで流れ1520がノズルから出て、風力タービン1500に進入する。この風力タービンの対称軸線1550は、ノズルの長さ方向対称軸線と一致する。制御システムのメモリーは、参考図書の表2からのデータ、及び様々な標高での密度、圧力、温度、及び音速等の標準大気及び局所的な大気のデータを記憶している。更に、スロートのところでの空気流の速度についての情報を制御システムのCPUに提供するため、少なくとも一つのピトー管1420が一体に設けられている。随意であるが、空気流1520の空気流の速度を計測するため、別のピトー管1421が設置されている。この図に示すノズルは、円形断面であってもよいし、矩形断面であってもよい。矩形断面の場合には、ステーション1414での局所的空気速度が、この場合に得ることができる最大の空気速度であるM=1、即ち音速に達するようにステーション1414でのスロートの面積を設定するため、随意のスロート面積制御システムを追加する。
【0136】
制御システムは、二つの電動アクチュエータ1238、1438を作動する。各アクチュエータは、移動自在のプッシュピストン1239、1439を作動する。これらのプッシュ/プルピストンは、ノズル内殻1408、1409に取り付けられており、かくして、これらのピストンがそれらのシリンダ1238、1438から出るように移動するとき、スロート1414を狭め、これらのピストンがそれらのシリンダ1238、1438内に入るように移動するとき、スロート1414を拡げる。ピトー管1420は、スロートでの空気流1325の速度を計測し、この速度の情報を制御装置(デジタルコンピュータ)1230に伝達する。制御ユニットは、スロート1414のところでM=1を得るため、そのアルゴリズム及び記憶されたデータを使用することによってスロート面積の増減いずれかを決定する。ピトー管1420が空気の速度の計測値を送り続けるため、制御ユニットは、スロート面積の変化後の速度についてのフィードバックを直ちに得、空気流の速度をどのように改善するのかの結論を出す。
【0137】
ピストン1239、1439は、殻部1408及び1409(好ましくは鋼製)を引っ張り装置1413に押し付ける。引っ張り装置1413は、殻部1409をポッドの外フレームに向かって引っ張り、スロート面積1414を拡大するばね式取り付け装置である。殻部の右側縁部1500は、内殻1509上で自由に摺動し、かくして、ピストン1239、1439がスロート1414を狭めるように移動するとき、殻部の縁部1500は左方に移動し、ピストン1239、1439がスロート1414を拡げるように移動するとき、殻部の縁部1500は右方に移動する。制御システムは、制御ユニット1230、バッテリー1232、及びアンテナ1234に接続された随意の無線通信機(制御システムは、2004年の一般的な携帯電話と類似している)を備えている。制御システムは、指令を送信するため、及びピトー管等のセンサから来るデータを受信するため、1449等の制御線を使用する。別の被制御システムは、電気式停止/制動システム1461である。この停止/制動システム1461は、垂直ウィング1490に及ぼされる空力学的風力による、垂直軸線1300を中心としたアッセンブリ全体の回転を停止する。停止システムは、アッセンブリ全体がいきなり回転することがないようにするために必要とされる。これは保守中に重要である。かくして携帯電話によって停止指令を送信できる。別の態様では、保守員が手動で作動できるように、簡単な電気スイッチを安全な距離に設置してもよい。電気式停止機構1461が設置されたシリンダ1462に回転自在の垂直シャフト1464が挿入された一つのプラットホーム1465上にアッセンブリ全体を設置する。シリンダ1462は、地面1470に置いたベース1460にしっかりと連結されている。アッセンブリ全体は、海上に、タワーの上に、ベッセルに配置でき、任意の所望の高さまで地面の上方に持ち上げることができる。プラットホーム1465は、収束−発散ノズルアッセンブリ1400を二つのコラム1469、1470上に支持する。風力タービンユニット1500は、図12のユニットと同様に、空気流がノズル1400を出てタービン1500の入口に進入するようにコラム1450に取り付けられている。随意であるが、タービンユニット1500には、図1の実施形態について説明した始動システムが設けられる。
【0138】
随意であるが、コラム1450の高さは、制御システムによって制御される。制御ユニット1230は、電動アクチュエータ1238、1239について使用されたのと同じ方法でコラム1450の高さを制御する。風がない場合にはコラム1450を下げ、かくして空気流1520の経路上に障害がないようにする。風が吹き始め、定常状態の流れがノズル1408−1409内に発生したとき、制御ユニットは、風力タービン1500を図示の作動位置まで持ち上げる指令を送出する。風力タービンが作動位置にある場合には、空気流1520が風力タービン入口に進入し、インパルスタービンロータに当たってこれらのロータを回転し、風力タービンの回転軸線1550に組み込んだ発電機で電気を発生する。次いで、発生した電気をグリッドに送出し、そのうちの幾分かが局所的バッテリー1530及び制御システムのバッテリー1232を充電する。随意のタービン始動システムは、バッテリー1530と、このバッテリー1530からの電流によって駆動されたとき、タービンロータを回転し、流れ1520に対する抵抗を減少する、タービンと一体の発電機/モータを含む。かくして、風力タービン1500を所定位置に持ち上げたとき、そのロータは既に回転している。風力タービンがその作動位置にあるとき、制御システムは始動プロセスを停止し、バッテリー1530は、モータ/発電機に電流を送出するのを停止する。風力ノズル出口平面1418と風力タービン入口との間の距離を変化させるため、随意の電動アクチュエータ1467、1468が設けられている。これは、入口での漏れ及びエネルギーの損失を最少にするために行われる。随意のピトー管1421は、得ることができる最大速度について制御システムにフィードバックを提供し、これと同時に、電流計/電圧計(図示せず)は、発電機が発生する電気についての重要なデータを提供する。
【0139】
図17は、本発明の別の実施形態を概略に示す。地面660にしっかりと取り付けられた垂直なパイプ600が2つのリング602及び606を支持する。これらのリングは、パイプ600を中心として回転できる。ビーム608、610がリング602及び606にしっかりと取り付けられている。ノズル620は、これらのビーム608、610にピン612及び614で取り付けられており、かくしてノズルは、随意であるが、ピン612及び614の垂直軸線を中心として回転できる。これは、ビーム608、610内の疲労応力を減少する上で重要である。
【0140】
ノズル620は、その内部に空気タービン690を支持する。この空気タービン690は、これらの用途の任意の空気タービン又は他の設計をノズルに設置できるということを強調するため、概略に示してある。随意の支持ビーム640がリング642を介してパイプ600に連結されている。垂直コラム644がノズルの後端を支持する。コラム644は、翼状断面輪郭を有し、かくしてスタビライザーとしても役立つ。地面によって支持された随意のコラム644はホイール648を有し、このホイールは、その回転軸線649を中心として回転できる。
【0141】
リング602及び606は、随意であるが、ノズル入口に進入する空気の速度を最少にするため、図示の断面605を持つウィング状フェアリング604に取り付けられている。風630が吹くと、ノズルが回転して図示のように風に向かう。これはノズルの横方向力により、パイプ600の垂直軸線601を中心として回転するためである。更に、随意のコラム644は、航空機の垂直スタビライザーと同様に作用し、ノズル600を風と整合するのを補助する。このような整合中、ホイール648は剛性の表面660上で転動する。空気流632がノズル628に進入した後、流れは空気タービン690に到達し、タービンのロータを回転し、発散ノズル629を空気流638として出る。
【0142】
この実施形態の利点は、自然に安定し、小型(入口直径が1m)から大型(入口直径が100m)のノズルに適用できるということである。風630は随意のウィング状フェアリング604を通過し、ノズルに空気流632として進入する。ノズルスロートでは、タービン690が空気の運動エネルギーを電気に変換する。ノズルは、ノズル内の空気流を安定させるのを補助する収束−発散ノズルであるということに着目されたい。
【0143】
上述の実施形態に関して上文中に説明した実施形態は、随意であるが、この実施形態にも適用できる。
【0144】
更に、ノズル620及びその支持機構602−649の設備全体に、パイプ600(及び随意のコラム644)を短縮する手段が設けられていてもよい。その結果、ノズルを下げることができる。装置全体を取り囲む保護壁(図示せず)により、風力タービンが強い風で損傷することがないようにブロックできる。
【0145】
更に、このような実施形態を海に設置することもでき、その場合には、ホイール648の代わりにボートやブイを使用する。
【0146】
図18は、本発明の別の実施形態を示す。図1に関し、空気が、面積が大きい入口から小さな断面積に向かって流れる場合に、収束ノズルが空気流の内部エネルギーの幾分かを運動エネルギーに変換するということがわかった(表2参照)。本発明を風力発電とは別個のものにするため、人工空気流を発生するのがよい。これは、収束ノズルが、空気の内部エネルギーを運動エネルギーに変換することによって、空気流の運動エネルギーを増大するためである。運動エネルギーに変換された内部エネルギーの量は、自然の(風の)運動エネルギーの、221.92 /−21.7372 =104.2倍であったことが示された。従って、本発明の別の実施形態は、図18に示すようにノズル入口に位置決めされた動力ファン520を含み、このファンが、空気タービン502が位置決めされたスロート514に向かう空気流530を発生する。空気タービン502は、本願の図12に示す空気タービンであるが、他の空気タービンを使用してもよい。図18に示す空気タービン502は、タービンの出力の幾分かを取り出し、これをギヤ562と係合したギヤ552を介してシャフト560に伝達する機械的動力出力システムを示す。シャフトは、回転動力をギヤボックス568に伝達し、任意の回転動力消費装置にシャフト569を介して伝達する。このような構成は、乗り物を駆動するためのエンジンである。タービン/エンジンを始動するため、運転者は、動力ファン520の電動モータ528をバッテリー(図示せず)に接続する。ファン520は空気530を収束ノズルに吸い込み、ここで空気流を加速し、タービン502に到達する。タービン502は、ここでは、発電機(図示せず)を備えている。発電機は、図12に示すのと同様に、シャフト551に取り付けられている。
【0147】
しかしながら、好ましくは電動モータ528によって駆動される動力ファン520は、何らかの外部動力を使用してもよい。例えば、任意の外部動力によって駆動される動力シャフト(PTO)をファンハブ526に連結し、これでファンを駆動してもよい。ファンは空気530を吸い込み、これを空気流532としてスロート514に向かって押す。ファン支持ビーム528は、抗力を最小にするため及び流れを対称軸線に沿って差し向けるため、翼状輪郭断面529を有する。好ましくはアルミニウム又はステンレス鋼製の随意のガイドベーン540がノズル幅に亘って設けられており、流れを剥離していない状態に保持し、乱流及び圧力上昇を最少にする。これらのガイドベーンは、ノズルの対称軸線550を中心として対称に形成された薄く平らな金属製シートであってもよいし、金属製の円形のシートであってもよい。これらのガイドベーンの重要な(本願の全てのノズルに適用できる)特徴は、ガイドベーンの下流縁部の傾斜が、互いに、及びノズルの対称軸線550に対して平行であるということである。これは、乱流を防ぐ上で、及びガイドベーン間を出る全ての副流が滑らかに組み合わせられるようにする上で重要である。
【0148】
更に、図20でわかるように、ファンを支持するために延長されたタービンシャフトは、ファンに動力を加えることができる。
【0149】
公称出力がXkWの電動モータ528でファンを駆動するものと仮定する。更に、ファンが電力の50%を運動エネルギーに変換し、乱流及び剥離によりノズルの等エントロピー性が80%に過ぎないものと仮定する。かくして、定常状態の流れが入口510に進入する。電気エネルギーの約30%しか電動モータ528によって消費されない。しかしながら、スロートでは、運動エネルギーを100倍に増大できる(スロートの面積が入口510の面積の1/10であると仮定すると、収束ノズルの作用により、スロートのところで、投入されたエネルギーの30倍以上の運動エネルギーを得る)。タービン502の効率が50%である場合には、15倍の出力を提供し、正味利得は14倍の出力である。かくして、空気の内部エネルギー源により、消費される全てのエネルギーよりも多くのエネルギーを発生する独立したエネルギー機械を提供する。ポッド500は、内殻508及び509、及びポッド外殻を支持する長さ方向ビーム502及びフレーム503を持つターボジェットエンジンポッドと同様に形成されている。図1乃至図17の実施形態について言及した全ての設置された構成をここに適用できる。この実施形態は、風力に関して作動でき、更に、エンジン508の動力とともに、又はこの動力なしで作動できるということに着目すべきである。この装置を自然の風で作動する場合には、整合用垂直テールウィングを必要とする。更に、鋭い入口前縁に着目されたい。これは、ターボジェットエンジンポッドの代表的な丸みを付けた前縁と異なっている。入口に動力ファンを設けてもよく、これは、電気グリッド及び自動車のエンジンに電力を提供する家庭用発電機、公共の建物の発電機として使用できる。公共の建物の発電機については、こうした建物に蒸気設備が備えられているため、ファンに動力を提供するのに蒸気動力を使用でき、発電機は電力をグリッドに提供する。
【0150】
図19は、本発明の更に別の実施形態を示す。この実施形態では、収束ノズル又は収束−発散ノズルを、動力ファン、即ち航空機を駆動するターボプロップエンジンとして機能するタービンと組み合わせる。図19は、ポッド、ノズル、及びファンの対称軸線550に沿った側断面図である。ポッド、ノズル、及びファンは、全て、軸線550に関して半径方向で対称である。ポッド500の入口のところでファン520がシャフト525に取り付けられている。このシャフト525の回転軸線は、軸線550と一致する。電動モータ528がシャフト525を回転し、かくしてファン520を回転する。このファン520は、前記ノズルに流入する空気530をその回転時に吸い込む。更に、下流矢印532は、静ウィング628を通過した後のノズル500内の流れを示す。ウィング628の断面529は、空気流を軸線550と平行に差し向ける。更に、ガイドベーン540(スプリッターベーンとしても周知である)は乱流を阻止し、空気流534をタービン入口514に向かって差し向ける副収束ノズルを形成する。空気流がタービンのスロートのところでその最高速度に達したとき、シャフト551に取り付けられたタービンロータ502を回転し、これを強制的に回転し、ベベルギヤ552を駆動する。このベベルギヤ552は、シャフト560に取り付けられたベベルギヤ562と係合している。シャフト560は、バッテリー又は他の電源等の外部動力源を使用してエンジンを始動した後、ファン520を駆動するための電力を発生する発電機568に連結されている。ファン520は、空気をノズル500及び608の両方に投入する。ファン520の外部分は、空気流570をガイドベーン640に投入する。この空気は、可動壁603を内方又は外方に移動してノズルの断面積を変化させ、排気区分618を離れるときに最大の推力を発生することによって加速又は減速される。ノズル壁603は、シリンダに設けられた矩形の切欠きの形状を有する。ノズル周囲に設けられた幾つかのこのような部品により、ノズルのスロートを変化させることができる。従って、壁603は移動自在であり且つヒンジ604、電動アクチュエータ606、及び取り付けエレメント609によってポッド600に連結されている。電動アクチュエータ606の他端には、シリンダ605内に引っ込められるアクチュエータアーム606が設けられており、このアームは、エレメント612に力を加えて左方に移動し且つヒンジ604のヒンジ線を中心として反時計廻り方向に回転し、かくしてノズルの断面を増大する。別の態様では、アクチュエータ605、606は液圧アクチュエータであってもよい。図19の下半分は、両ノズルがそれらの通常の位置にある場合のエンジンを示し、フレーム610がポッド600を補剛しており且つポッド外殻609にしっかりと連結されている。ポッド外殻609は弾性材料であり、移動自在のドア616の殻部615に押し付けられ、かくして、ドア616を移動すると、殻部615と接触したままとなる。ビーム620は、翼状輪郭断面621を有する半径方向に分配された複数の支持ビームであり、タービンを収容した内ノズルを外ポッド内殻602に連結する。
【0151】
エンジンを始動するため、バッテリー又は他の電源から電流を電動モータ528に提供し、このモータがファンのシャフト525を駆動する。
【0152】
航空機のエンジンは、離陸時の速度ゼロから巡行中の最大速度までの広範な空気速度で作動する必要があるため、航空機の速度をマッハ=1.0に近付ける収束−発散ノズルの理論的スロート面積は、入口速度に従って変化する。かくして、エンジンが離陸時の速度を主眼として設計された場合には、航空機が速度を得たときにノズルのスロート面積を増大する必要がある。そうでない場合には、流れが絞られてしまい、即ち、スロートのところでマッハ=1が得られるが、空気流の質量速度は上昇しない。このように絞られることがないようにするため、ノズル内壁516は移動自在であり、断面積増大位置で示してあり、この際、閉鎖位置を607で示す。形状が可変のこのノズルが、本発明の別の特徴である。
【0153】
このエンジンの推力を増大するため、随意の燃料噴射装置700、704、及び706が設けられている。このような燃料噴射装置は、ノズル断面に亘って半径方向に分配されている(空気流を案内する半径方向に分配された幾つかのウィング628(図示せず)が設けられており、これらのウィングの各々が、随意であるが、これらの燃料噴射装置を支持している)。線702は、燃焼する燃料の火炎が伝播する円錐形を示す。このような燃料噴射装置は、特に高高度(6096m(20000ft))巡行時に必要とされ、離陸の目的でも使用できる。これは、このエンジンの推力が、入口での空気流の速度で決まるためである。
【0154】
図19は、ファンを電動モータ528で駆動することが示してある。しかしながら、ファンは、タービンロータ502をファン520に連結するシャフトによって駆動でき、かくして大出力の電動モータ528の必要をなくす。このような解決策を図20に示す。
【0155】
上述の実施形態について説明したのと同様の制御システム(図19には示さず)を使用し、図19及び図20の両実施形態の余分の空気流用のドア516、616を制御する。エンジンの推力を制御するため、エンジン始動電力とは方向が逆の直流を電動モータ528に提供する。発電機が発生した電流(直流)の変化は、発電機568の出力を電動モータ528まで延びる電線に連結する電線の接続を変化することによって行われる。別の態様では、移動自在のドア616を移動して外ノズル602出口領域に近付ける。推力逆転装置を図21に示す。
【0156】
このようなエンジンが航空機のエンジンとして役立つことができることを示すため、入口面積が0.5m2 のこのようなエンジンの推力及び出力を計算する。ここで、海面高さでの航空機の速度VAC=0、中央ノズル入口での空気流をV=34m/s=111.5ft/sとする。
標準大気:T=59+460=519 oR;
ρ=0.002378;
p=2116.2lb/ft2 ;
a=1117ft/s
【0157】
1.中央ノズルを通る質量流量mを計算する。
【数22】
【0158】
2.静止状態の空気を押してV=34ft/s(入口)にするのに必要なエネルギー毎秒を計算する。
【数23】
【0159】
3.マッハ=0.1についてのスロートの断面積を参考図書の表2を使用して計算する。
【数24】
【0160】
4.マッハ=1、即ちV=1117ft/sと仮定してスロートでのエネルギー毎秒を計算する。
【数25】
【0161】
5.タービンの効率を45%とした場合の、プロペラを駆動するのに利用できるエネルギーを計算する。
【数26】
【0162】
6.航空機の速度が185ft/sである場合のエンジンの出力を計算する。ファンは、この速度で空気を約223.4ft/s即ちマッハ=0.2で押すものと仮定される。
参考図書の表2から、
A* /A=0.3374
∴ A* =0.5×0.3374
∴ =0.1687m2 を得る。
このスロート面積は、上文中でV=34m/s=111.5ft/sについて計算したスロート面積よりも大きい。
従って、次いで比較的小さなスロートを絞ってもよく、これが起こらないようにするため、図19のドア516を開放し、余分の流れを流れ533としてタービンを迂回させ、外部ノズルに進入する流れ632と合流させる。これらの流れは両方とも、タービンによって供給された出力によって、上文中で計算したように駆動される。
エンジンの出力を上昇するため、ジェット燃料を噴射してもよい。燃料の燃焼によりノズル内の圧力が上昇し、タービンのところでのマッハ数が増大する。これは、音速が温度の平方根と比例するためである。かくして、タービン内のガスの温度が1000 oRまで上昇した場合、音速は、
√(γRT)=√(1.4×1715×1000)=1549.5である。これは、海面高さの標準大気の温度の1.387倍である。この音速の増大は、タービンの出力が1.3873 =2.67倍増大するということを意味する。
エンジンの出力を増大するための別の解決策は、ほぼ回転速度、即ち約マッハ=0.15である航空機速度に対してエンジンを設計することである。入口510での空気流の速度をマッハ=0.2であると仮定すると、
A* /A=0.3374
∴ A* =0.5×0.3374
∴ =0.1687m2 が得られる。
【0163】
7.入口510での、空気流が入口に進入する前の空気流のよどみパラメータは、
【数27】
【0164】
8.入口510での質量流量mを計算する。
M=0からM=2までの等エントロピー空気加速を仮定し、表2からρを得る。
【数28】
【0165】
9.タービンのスロートでの空気の運動エネルギーを計算する。M=1と仮定する。
1)スロートでの静温度を表から計算する。
【数29】
2)音速を計算する。
【数30】
3)スロートでの空気流の速度は、V=a×1.0=1019.7である。
【数31】
この値を上文中で計算した値と比較すると、1455703/890226=1.63となり、大幅な上昇が得られる。
このエネルギーの45%を使用できるものと仮定すると、
0.45×1455703=655066ft・lbが得られる。
【0166】
10.プロペラによって空気流の速度をM=0.15からM=0.2まで上昇するのに必要なエネルギー毎秒を計算する。
【数32】
【0167】
11.プロペラで利用できる正味エネルギー毎秒は、
【数33】
である。
【0168】
M=0.15の航空機の速度でのM=1及びタービンのスロートでのM=1.0についてエンジンを設計することによって、A=0.1687m2 のスロート面積を持つ大型のタービンを必要とする。航空機速度V=0でのエンジン出力は、スロートでの空気流の速度が1.0よりも低いため、低い。
【0169】
当然のことながら、ここで使用する大きさの、燃料により出力を発生する現在のターボプロップエンジンは、約3000・を発生するが、こうしたエンジンは、大量の燃料を使用するということを思い出さなければならない。この大量の燃料は、航空機の離陸時重量の大きな部分を占め、即ちATR42−400等の航空機の離陸時重量の約25%を占める。
【0170】
従って、本発明によるエンジンは、
1.燃料を使用しない。このことは、航空機の飛行範囲が無限であるということを意味する。
2.航空機が安全である。火災の危険がない。
3.航空機は燃料タンクも燃料システムも必要としない。従って、軽量且つ安価に製造でき、そのため操業に要する費用が小さい。
4.航空機は遥かに静粛である。これは、エンジンの騒音の大部分が燃料の燃焼によって発生するためである。
5.航空機はCO2を発生せず、地球温暖化プロセスに参与せず、逆に、空気流の温度を下げる。かくしてこのエンジンは環境に非常にやさしい。
【0171】
図20は、本発明によるエンジンの別の実施形態を示す。これは、同様のノズル設計を持つ、航空機用の別のターボプロップエンジンである。このエンジンは、二つの同軸の駆動シャフトを備えている。内駆動シャフト591は、タービン低空気速度ロータ504を大ファン520に連結し、駆動シャフト590は、高空気速度ロータ502を小内ファン532に連結する。このエンジンを始動するため、電動モータ587に電流を提供する。このモータは、シャフト584を介してベベルギヤ組583−582を駆動する。ギヤ582は、小ファン532を駆動する外シャフト590にしっかりと連結されている。ファン532が回転すると、このファンが空気530を吸い込み、この空気が内側ノズル500に進入し、大ファン520及び静ウィング528(この図には一つしか示してない)を通過する。ウィング528は内シャフト591をベアリング571を介して支持するということに着目されたい。内シャフト591は、タービン側部でアーム593及びベアリング575によって支持されている。同様に、外シャフト590は、静ウィング531(この図には一つしか示してない)によってベアリング573を介して支持されており、外シャフトの他端は、アーム592及びベアリング576によって支持されている。静ウィング528及び531は、ファンが発生した空気流の方向を変え、エンジンの軸線550と平行に流す。空気流は、静ガイド/支持ウィング531を通過した後、軸線550に対して半径方向で対称なガイドベーン(スプリッターベーンとしても既知である)540によってタービン入口に差し向けられる。このベーンは、ノズル内に等エントロピー流れを維持し、乱流が発生しないようにするための随意のエレメントである。空気流が、収束ノズル500によって加速された後、タービンに高速で進入するとき、タービンロータ502を回転し、その後、タービンロータ504を回転する。ロータ504は、タービンを通過する空気流の運動エネルギーの大部分を取り出すように設計されている。空気は、タービンロータを流れ535として離れた後、発散ノズル509内で膨張し、タービンを流れ536として出る。ロータ504は内シャフト591を回転し、この内シャフト591は、ハブ570によってシャフト591にしっかりと連結された大ファン520を回転する。このファンは、このエンジンの主推力発生機である。ファン520は空気流をノズル500及び608の両方に入れる。内ノズル内の空気が余分にならないようにするため、ドア516を開放する(図19についての説明を参照されたい)。この空気流533は外ノズルに進入し、空気流632と合流し、外ノズル608に進入する。随意のガイドベーン(軸線550に対して半径方向で対称である)は、空気流を乱流がない状態に保持するのを補助するということに着目されたい。随意である(図面に示してない)が、軸線から半径方向外方に延びる追加のガイドベーンが、ファンの作動による流れの渦運動を阻止するのを補助する。
【0172】
上述の実施形態に説明したのと同様の制御システム(図19及び図20参照)を使用し、図19及び図20の両実施形態の余分の空気流用のドア516、616を制御する。エンジンの推力を制御するため、ケース568内のブレーキを作動して大ファン520の回転数を制御し、かくしてこのエンジンの推力を変化する。
【0173】
図21は、本発明によるターボプロップエンジンの別の実施形態を示す。このエンジンは、基本的には、図20に示すエンジンと同じである。しかしながら、推力逆転装置616を備えている。外ノズル後エレメント616aは、航空機巡行位置にある。二つの電動アクチュエータ605及び676によってポッド600に連結されている。着陸中、大きな制動力が必要とされる場合には、パイロットは推力逆転装置を作動する。即ち、図面の他方の半分に678として示すように、アクチュエータ676を一杯に引っ込めると同時にアクチュエータ605を、675で示すように、一杯に延ばす。この相互作用により、617bとして示すドア616aの新たな位置をとる。位置617bは、ノズルの排気面積を減少し、流れの幾分かを633及び634として戻し、かくして制動力を発生する。エンジンポッドは、全てが同時に作動する幾つかのこのようなドアを持つということは理解されるべきである。更に、電動モータ568から延びるシャフトは、その取り付け後には「浮動」状態にない。即ち可動ドア617からずらしてあるということに着目されたい。実際には、シャフトは、ノズルの移動不能の部分があるこのような可動ドア616間に取り付けられる。
【0174】
図22は、本発明による別の実施形態を示す。この実施形態は、収束ノズル内の空気流から電気を発生する。この実施形態は、図19及び図20の実施形態と同様のターボプロップエンジンと同じ技術を使用する。同様のファン532が外部動力源によって始動され、このファンが外シャフト590を駆動する。このような外部動力源は、バッテリーであってもよいし、又は電動モータ585を駆動する他の電力源であってもよい。電動モータ585は、シャフト584を回転し、このシャフト584がベベルギヤ582、583によって外シャフト590を駆動し、これにより小ファン560を回転し、空気530をノズル500に吸い込む。流れ532は、収束ノズルによってファン560に向かって加速されるとき、翼状輪郭断面を持つファン560及び支持ビーム562を通過する。支持ウィング562は、ベアリング526を介して外シャフト590を支持する。幾つかの支持エレメント562がタービンの対称軸線550を中心として半径方向に分配されている。これらのエレメントは、更に、流れを差し向け且つファン560からの回転流れ速度をなくすのに役立つ。随意のガイドベーン540及び541は、流れを乱流がない状態に保持するのを補助する。これらのガイドベーンは、対称軸線550に対して半径方向で対称である。空気流は、タービンにほぼ音速で進入し、タービンのロータ502及び504を回転する。ロータ502は外シャフト590を駆動し、このシャフトが小ファン560を回転する。また、ロータ504は内シャフト591を駆動し、この内シャフト591が大ファン520を駆動する。ロータ504がタービンの運動エネルギーの大部分を得るため(高効率のタービンブレード輪郭を備えることによって)、二つの消費部分について空気の運動エネルギーの大部分を使用する。第1に、大ファン520を駆動するため、及び第2にベベルギヤ552、562及びシャフト560によって発電機568を駆動するためである。かくして、大量の空気がタービンに押し込まれ、ロータ504が発生する大量の動力を発電機568に送出する。発生した電流は、消費部分に、又はパブリックグリッドに伝達される。
【0175】
図18の実施形態を越える図22の実施形態の利点は、小ファン560が、ファン560を始動するために少量の動力しか必要としないということである。ファン560が吸い込みを開始した後、タービンは、大ファン520を駆動するための動力を提供する。例えば、個人の家庭用の装置は、直径50cmのファンを使用してもよく、約7kWの電力を提供するには、大ファンの直径は約1mである。タービンのロータを連結するシャフトの代わりに、発電機585が発生した電気が電動モータを駆動するように、装置を直接駆動する電動モータを使用してもよいということに着目すべきである(図22には示してないが、図18にエレメント528として示してある)。電動モータのシャフトは、図18に示すように、ファンのシャフトとしても役立つ。このことは、ファン520についても適用される。ファン520は、随意であるが、発電機568から電気を得る電動モータ(図22には示さず)によって駆動される。
【0176】
本発明に従って、動力式のファンを備えた又は備えていない任意のノズル設計及び空気タービン設計の任意の組み合わせを形成できるということに着目すべきである。かくして、図16の収束−発散ノズルを、本願に説明した任意の空気タービンと組み合わせることができる。更に、本発明の一実施形態に関して説明した任意のシステムは、実際的である場合には、本明細書中に説明した他の実施形態とも関連している。これらの場合もまた、本発明の部分である。例えば、始動システムは、風力タービンの全ての実施形態と関連している。一例は、随意の制御システム、ピトー管空気速度計測装置、任意の動作センサ、及び図14に関して説明した停止システムを使用することである。更に、従来の「プロペラ」状風力タービンを1つ、又は幾つかを次々に並べて収束ノズルのスロートに設置してもよく、又は図16に示すように出口ノズルの僅かに後方に設置してもよい。
【0177】
数値計算からわかるように、収束ノズルを通って流れる空気は冷却され、従ってノズル及びタービンのロータブレードに氷が堆積する。氷が堆積しないようにするための一つの方法は、作動前及び作動中にノズルエレメント及びタービンエレメントの表面にオイルや灯油等の氷を防ぐ液体をスプレーすることである。別の方法は、電流や電気ヒーターで発生した高温の空気を使用してこれらの表面を温め、重要な場所の氷を溶かすことである。
【0178】
本発明は、上文中に単なる例として説明した実施形態に限定されない。本発明は、特許請求の範囲によってのみ限定される。
【特許請求の範囲】
【請求項1】
空気の内部エネルギーを運動エネルギーに、更に運動エネルギーを機械的エネルギーに、実質的に明細書及び図面に記載されているように変換するための方法。
【請求項2】
請求項1に記載の方法において、入口断面積がAiのノズルを通して温度がTiの空気を速度Viで流し、この際、可変断面積Adの下流の空気流のパラメータは、速度がVdであり、温度がTdであり、前記断面Adの一部又は全部がAiよりも小さく、そのため、Adでの空気速度値VdがViよりも、ほぼ、AiをAdで除した値(Ai/Ad)をViに乗じた値だけ大きく、この場合、空気速度Vdの増分による空気速度運動エネルギーの増分は、空気の内部エネルギーの減少とほぼ等しく、即ち質量流量mに空気の定圧比熱Cpを乗じ、更に区分Adでの空気温度の低下ΔT、即ちΔT=Ti−Tdを乗じた値とほぼ等しく、かくしてこのエネルギー変換は、約m*Cp*ΔTであり、これは、ほぼ、
m(Vd2−Vi2)/2と等しい、方法。
【請求項3】
先行するいずれかの請求項に記載の方法において、
空気の運動エネルギーの幾分かを機械的エネルギーに変換するために、タービンがノズル出口又はノズル内のいずれかに配置されている、方法。
【請求項4】
先行するいずれかの請求項に記載の方法において、
前記ノズルは、空気速度を連続的に加速するために、断面が連続的に小さくなっている、方法。
【請求項5】
請求項1に記載の方法において、
前記ノズルは収束−発散ノズルであり、前記タービンは、前記ノズルの最小断面積のところ、即ちスロートに位置決めされるか或いは、前記スロート断面の前方又は前記スロート断面の後方のいずれかの、より大きな断面を持つ区分に位置決めされる、方法。
【請求項6】
請求項1又は2に記載の装置において、
前記ノズルの内側に少なくとも一つのガイドベーンを有し、このガイドベーンは、可変の断面積を通って流れる少なくとも二つの副流を形成する、装置。
【請求項7】
請求項1に記載のノズルにおいて、
内側に複数のガイドベーンを備えている、ノズル。
【請求項8】
請求項1乃至6のうちのいずれかに記載の装置において、
空気は水分を含んでおり、かくして、空気が加速し且つその温度が低下するとき、水分が凝縮し、かくして水滴となり、かくして前記ノズル内の静空気圧が低下し、前記ノズルに進入する速度及び質量流量を増大する追加の吸引力を生成する、装置。
【請求項9】
請求項1乃至7のうちのいずれかに記載の装置において、
前記水滴は、何らかの用途で使用するために集められる、装置。
【請求項10】
請求項5に記載の装置において、
前記タービンは、電気を発生する発電機を駆動するための機械的エネルギーを提供するか、或いは、エンジンとして機能する機械的エネルギーを提供する、装置。
【請求項11】
請求項1乃至7のうちのいずれかに記載の装置において、
前記空気流の源は、自然の風である、装置。
【請求項12】
請求項1乃至8のうちのいずれかに記載のノズルに取り付けられた風力タービンにおいて、
前記空気流に対して垂直な軸線周りに回転するロータハブを有し、前記空気流は、前記ロータハブから各々半径方向に延びるロータハブブレードに当たり、前記ブレードの平面形体は、空気が前記ブレードに当たるチャンネルの断面の形状及び大きさである、風力タービン。
【請求項13】
請求項1乃至9のうちのいずれかに記載の収束ノズルに取り付けられた風力タービンにおいて、
二つの平行な円形ディスク間を延び且つこれらのディスクに円をなして固定された幾つかのウィングを有し、かくして前記ウィングは、空気が流れるチャンネル内に配置され、流れる前記空気は前記ウィングに空力学的力を発生し、前記空力学的力により発生した空力学的回転モーメントにより、前記ディスクを、前記ディスクの平面に対して垂直であり且つ前記ウィングの長さと平行な軸線周りに回転する、風力タービン。
【請求項14】
請求項1乃至8のうちのいずれかに記載の装置において、
空気流源は、ノズルを通る空気流を発生する人工空気源である、装置。
【請求項15】
請求項6に記載の装置において、
前記人工空気源は、電気的動力源、機械的動力源、蒸気動力源、風力源等の任意の動力源によって動力が提供されるファンである、装置。
【請求項16】
請求項1乃至10のうちのいずれかに記載の可動装置において、
そのタービンの機械的回転動力の幾分かを乗り物用駆動システムに伝達することによって、乗り物用エンジンとして機能し、タービンの機械的回転動力の一部を発電機に伝達し、電力を発生し、人工空気源を駆動する、可動装置。
【請求項17】
先行するいずれかの請求項に記載の収束ノズルに取り付けられるタービンにおいて、
少なくとも1段の軸流タービンを含む、タービン。
【請求項18】
先行するいずれかの請求項に記載の装置において、
第1ノズルの入口が地面の上方にあり、その排気をパイプによって第1ノズルの下方の第2ノズルに連結し、前記第2ノズルはタービンを含む、装置。
【請求項19】
先行するいずれかの請求項に記載の収束ノズルにおいて、
前記ノズルスロートのところでの空気速度を所望の速度まで最大にするために、入口断面積を変化させる自動制御システムを備えている、収束ノズル。
【請求項20】
請求項1乃至15のうちのいずれかに記載のノズルにおいて、
前記スロートで所望の空気速度を達成するために、前記ノズルスロート断面積を変化させる制御システムと組み合わせた、ノズル。
【請求項21】
先行するいずれかの請求項に記載のノズルと、先行するいずれかの請求項に記載の任意の種類のタービンとの組み合わせにおいて、
前記タービンは、前記スロートの前方、前記スロートのところ、又は前記スロートの後方に配置される、組み合わせ。
【請求項22】
先行するいずれかの請求項に記載の装置において、
前記入口に進入する空気流が前記タービンを通過して前記装置を出ることができるようにするために、空気タービンの回転を開始するスターターシステムが設けられている、装置。
【請求項23】
先行するいずれかの請求項に記載の装置において、
ウィングベクトルに対して0°乃至180°の任意の角度の来入風に向かって前記入口が回転され得るように、回転システムに取り付けられている、装置。
【請求項24】
請求項1乃至20のうちのいずれかに記載のノズルにおいて、
前記空気タービンを回転させるための動力を提供する始動システムを有し、前記始動システムは、電動モータと、バッテリーや電気グリッド等の電源とを含み、前記電動モータは、随意であるが、前記タービンの発電機である、ノズル。
【請求項25】
風力タービン始動システムにおいて、
風センサと、バッテリーと、電動モータと、を含み、前記電動モータは、空気を吸い込み、ノズルに進入する風をタービンブレードを通して流すことができる作動方向に前記タービンを回転させる、風力タービン始動システム。
【請求項26】
先行するいずれかの請求項に記載の装置において、
自由風内に配置された実質的に垂直なウィング表面を持ち、そのため、来入風が空力学的力及びモーメントを前記ウィングに発生させ、かくしてこのモーメントにより装置を前記来入風に向かって回転させる、装置。
【請求項27】
先行するいずれかの請求項に記載の装置において、
前記装置を前記風に向かって回転させるための動力手段を有する、装置。
【請求項28】
請求項1乃至26のうちのいずれかに記載のノズルと、前記ノズルに組み合わされて前記ノズルと共に作動する任意の空気タービンと、を備え、液体のような防氷手段或いは電流や高温空気による加熱を使用して、前記ノズル及びタービンエレメントから氷を溶解する、ノズル及び空気タービン。
【請求項29】
入口に動力ファンを持つ、先行するいずれかの請求項に記載の装置において、
先行するいずれかの請求項に記載のタービンが設けられており、前記タービンは、ブレードが自由空気に面するプロペラを駆動し、かくしてこの装置は、航空機を駆動するターボプロップエンジンである、装置。
【請求項30】
請求項29に記載の装置において、
前記動力ファンを電動モータによって、又はタービンの機械的動力によって駆動する、装置。
【請求項31】
請求項29又は30に記載のターボプロップエンジンにおいて、
動力ファンを備えた内収束ノズルと、前記動力ファン及びより大きな追加のファンにエネルギーを提供するタービンとを備えており、前記追加のファンは、空気を外ノズルに押し込み、この組み合わせは、航空機を駆動する二段ターボプロップエンジンである、ターボプロップエンジン。
【請求項32】
先行するいずれかの請求項に記載のターボプロップエンジンにおいて、
可変形状の収束−発散ノズルを有する、ターボプロップエンジン。
【請求項33】
先行するいずれかの請求項に記載のターボプロップエンジンにおいて、
可変形状の収束ノズルを有し、前記ノズルの可動部品の向きを変えて、空気流を、進入する流れとは逆方向に押し、前記装置は、推力逆転装置を持つ、航空機を駆動するターボプロップエンジンである、ターボプロップエンジン。
【請求項34】
先行するいずれかの請求項に記載のターボプロップエンジンにおいて、
空気流の温度を上昇させ、内部エネルギーを増大させ、質量流量を増大させ、タービンのところに音速の空気流を発生させることによって、タービンが発生するエネルギーを増大させるために、そのノズルに燃料噴射装置及び点火装置が組み込んである、ターボプロップエンジン。
【請求項35】
自然の風とは別個に空気の内部エネルギーから電気を発生する、先行するいずれかの請求項に記載の装置において、
前記装置の始動に使用される第1動力ファンを備えた収束ノズルと、空気の運動エネルギーを機械的エネルギーに変換するタービンとを有し、前記第1動力ファンと、好ましくはより大きな第2動力ファンと、電気を発生する発電機とを駆動する、装置。
【請求項36】
請求項6、29、30、31、32、33、34、及び35のうちのいずれかに記載の装置において、
液体のような防氷手段或いは電流又は高温の空気による加熱を使用して、氷をノズル及び空気タービンエレメントから溶解する、装置。
【請求項1】
空気の内部エネルギーを運動エネルギーに、更に運動エネルギーを機械的エネルギーに、実質的に明細書及び図面に記載されているように変換するための方法。
【請求項2】
請求項1に記載の方法において、入口断面積がAiのノズルを通して温度がTiの空気を速度Viで流し、この際、可変断面積Adの下流の空気流のパラメータは、速度がVdであり、温度がTdであり、前記断面Adの一部又は全部がAiよりも小さく、そのため、Adでの空気速度値VdがViよりも、ほぼ、AiをAdで除した値(Ai/Ad)をViに乗じた値だけ大きく、この場合、空気速度Vdの増分による空気速度運動エネルギーの増分は、空気の内部エネルギーの減少とほぼ等しく、即ち質量流量mに空気の定圧比熱Cpを乗じ、更に区分Adでの空気温度の低下ΔT、即ちΔT=Ti−Tdを乗じた値とほぼ等しく、かくしてこのエネルギー変換は、約m*Cp*ΔTであり、これは、ほぼ、
m(Vd2−Vi2)/2と等しい、方法。
【請求項3】
先行するいずれかの請求項に記載の方法において、
空気の運動エネルギーの幾分かを機械的エネルギーに変換するために、タービンがノズル出口又はノズル内のいずれかに配置されている、方法。
【請求項4】
先行するいずれかの請求項に記載の方法において、
前記ノズルは、空気速度を連続的に加速するために、断面が連続的に小さくなっている、方法。
【請求項5】
請求項1に記載の方法において、
前記ノズルは収束−発散ノズルであり、前記タービンは、前記ノズルの最小断面積のところ、即ちスロートに位置決めされるか或いは、前記スロート断面の前方又は前記スロート断面の後方のいずれかの、より大きな断面を持つ区分に位置決めされる、方法。
【請求項6】
請求項1又は2に記載の装置において、
前記ノズルの内側に少なくとも一つのガイドベーンを有し、このガイドベーンは、可変の断面積を通って流れる少なくとも二つの副流を形成する、装置。
【請求項7】
請求項1に記載のノズルにおいて、
内側に複数のガイドベーンを備えている、ノズル。
【請求項8】
請求項1乃至6のうちのいずれかに記載の装置において、
空気は水分を含んでおり、かくして、空気が加速し且つその温度が低下するとき、水分が凝縮し、かくして水滴となり、かくして前記ノズル内の静空気圧が低下し、前記ノズルに進入する速度及び質量流量を増大する追加の吸引力を生成する、装置。
【請求項9】
請求項1乃至7のうちのいずれかに記載の装置において、
前記水滴は、何らかの用途で使用するために集められる、装置。
【請求項10】
請求項5に記載の装置において、
前記タービンは、電気を発生する発電機を駆動するための機械的エネルギーを提供するか、或いは、エンジンとして機能する機械的エネルギーを提供する、装置。
【請求項11】
請求項1乃至7のうちのいずれかに記載の装置において、
前記空気流の源は、自然の風である、装置。
【請求項12】
請求項1乃至8のうちのいずれかに記載のノズルに取り付けられた風力タービンにおいて、
前記空気流に対して垂直な軸線周りに回転するロータハブを有し、前記空気流は、前記ロータハブから各々半径方向に延びるロータハブブレードに当たり、前記ブレードの平面形体は、空気が前記ブレードに当たるチャンネルの断面の形状及び大きさである、風力タービン。
【請求項13】
請求項1乃至9のうちのいずれかに記載の収束ノズルに取り付けられた風力タービンにおいて、
二つの平行な円形ディスク間を延び且つこれらのディスクに円をなして固定された幾つかのウィングを有し、かくして前記ウィングは、空気が流れるチャンネル内に配置され、流れる前記空気は前記ウィングに空力学的力を発生し、前記空力学的力により発生した空力学的回転モーメントにより、前記ディスクを、前記ディスクの平面に対して垂直であり且つ前記ウィングの長さと平行な軸線周りに回転する、風力タービン。
【請求項14】
請求項1乃至8のうちのいずれかに記載の装置において、
空気流源は、ノズルを通る空気流を発生する人工空気源である、装置。
【請求項15】
請求項6に記載の装置において、
前記人工空気源は、電気的動力源、機械的動力源、蒸気動力源、風力源等の任意の動力源によって動力が提供されるファンである、装置。
【請求項16】
請求項1乃至10のうちのいずれかに記載の可動装置において、
そのタービンの機械的回転動力の幾分かを乗り物用駆動システムに伝達することによって、乗り物用エンジンとして機能し、タービンの機械的回転動力の一部を発電機に伝達し、電力を発生し、人工空気源を駆動する、可動装置。
【請求項17】
先行するいずれかの請求項に記載の収束ノズルに取り付けられるタービンにおいて、
少なくとも1段の軸流タービンを含む、タービン。
【請求項18】
先行するいずれかの請求項に記載の装置において、
第1ノズルの入口が地面の上方にあり、その排気をパイプによって第1ノズルの下方の第2ノズルに連結し、前記第2ノズルはタービンを含む、装置。
【請求項19】
先行するいずれかの請求項に記載の収束ノズルにおいて、
前記ノズルスロートのところでの空気速度を所望の速度まで最大にするために、入口断面積を変化させる自動制御システムを備えている、収束ノズル。
【請求項20】
請求項1乃至15のうちのいずれかに記載のノズルにおいて、
前記スロートで所望の空気速度を達成するために、前記ノズルスロート断面積を変化させる制御システムと組み合わせた、ノズル。
【請求項21】
先行するいずれかの請求項に記載のノズルと、先行するいずれかの請求項に記載の任意の種類のタービンとの組み合わせにおいて、
前記タービンは、前記スロートの前方、前記スロートのところ、又は前記スロートの後方に配置される、組み合わせ。
【請求項22】
先行するいずれかの請求項に記載の装置において、
前記入口に進入する空気流が前記タービンを通過して前記装置を出ることができるようにするために、空気タービンの回転を開始するスターターシステムが設けられている、装置。
【請求項23】
先行するいずれかの請求項に記載の装置において、
ウィングベクトルに対して0°乃至180°の任意の角度の来入風に向かって前記入口が回転され得るように、回転システムに取り付けられている、装置。
【請求項24】
請求項1乃至20のうちのいずれかに記載のノズルにおいて、
前記空気タービンを回転させるための動力を提供する始動システムを有し、前記始動システムは、電動モータと、バッテリーや電気グリッド等の電源とを含み、前記電動モータは、随意であるが、前記タービンの発電機である、ノズル。
【請求項25】
風力タービン始動システムにおいて、
風センサと、バッテリーと、電動モータと、を含み、前記電動モータは、空気を吸い込み、ノズルに進入する風をタービンブレードを通して流すことができる作動方向に前記タービンを回転させる、風力タービン始動システム。
【請求項26】
先行するいずれかの請求項に記載の装置において、
自由風内に配置された実質的に垂直なウィング表面を持ち、そのため、来入風が空力学的力及びモーメントを前記ウィングに発生させ、かくしてこのモーメントにより装置を前記来入風に向かって回転させる、装置。
【請求項27】
先行するいずれかの請求項に記載の装置において、
前記装置を前記風に向かって回転させるための動力手段を有する、装置。
【請求項28】
請求項1乃至26のうちのいずれかに記載のノズルと、前記ノズルに組み合わされて前記ノズルと共に作動する任意の空気タービンと、を備え、液体のような防氷手段或いは電流や高温空気による加熱を使用して、前記ノズル及びタービンエレメントから氷を溶解する、ノズル及び空気タービン。
【請求項29】
入口に動力ファンを持つ、先行するいずれかの請求項に記載の装置において、
先行するいずれかの請求項に記載のタービンが設けられており、前記タービンは、ブレードが自由空気に面するプロペラを駆動し、かくしてこの装置は、航空機を駆動するターボプロップエンジンである、装置。
【請求項30】
請求項29に記載の装置において、
前記動力ファンを電動モータによって、又はタービンの機械的動力によって駆動する、装置。
【請求項31】
請求項29又は30に記載のターボプロップエンジンにおいて、
動力ファンを備えた内収束ノズルと、前記動力ファン及びより大きな追加のファンにエネルギーを提供するタービンとを備えており、前記追加のファンは、空気を外ノズルに押し込み、この組み合わせは、航空機を駆動する二段ターボプロップエンジンである、ターボプロップエンジン。
【請求項32】
先行するいずれかの請求項に記載のターボプロップエンジンにおいて、
可変形状の収束−発散ノズルを有する、ターボプロップエンジン。
【請求項33】
先行するいずれかの請求項に記載のターボプロップエンジンにおいて、
可変形状の収束ノズルを有し、前記ノズルの可動部品の向きを変えて、空気流を、進入する流れとは逆方向に押し、前記装置は、推力逆転装置を持つ、航空機を駆動するターボプロップエンジンである、ターボプロップエンジン。
【請求項34】
先行するいずれかの請求項に記載のターボプロップエンジンにおいて、
空気流の温度を上昇させ、内部エネルギーを増大させ、質量流量を増大させ、タービンのところに音速の空気流を発生させることによって、タービンが発生するエネルギーを増大させるために、そのノズルに燃料噴射装置及び点火装置が組み込んである、ターボプロップエンジン。
【請求項35】
自然の風とは別個に空気の内部エネルギーから電気を発生する、先行するいずれかの請求項に記載の装置において、
前記装置の始動に使用される第1動力ファンを備えた収束ノズルと、空気の運動エネルギーを機械的エネルギーに変換するタービンとを有し、前記第1動力ファンと、好ましくはより大きな第2動力ファンと、電気を発生する発電機とを駆動する、装置。
【請求項36】
請求項6、29、30、31、32、33、34、及び35のうちのいずれかに記載の装置において、
液体のような防氷手段或いは電流又は高温の空気による加熱を使用して、氷をノズル及び空気タービンエレメントから溶解する、装置。
【図1】

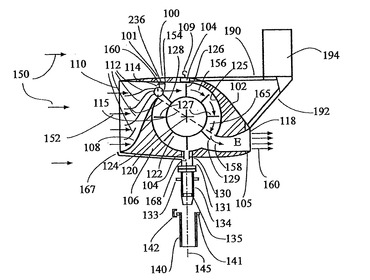
【図2】
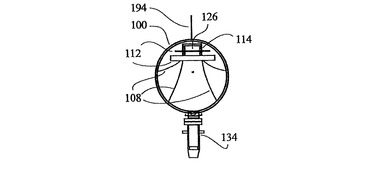
【図3】
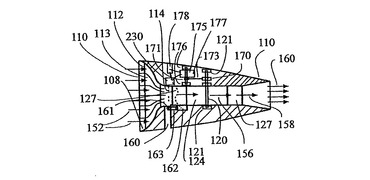
【図4】
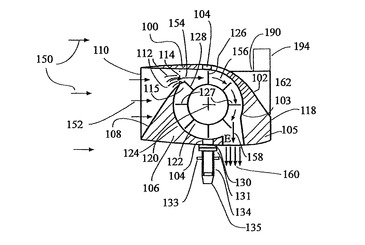
【図5】
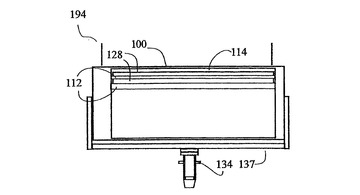
【図6】
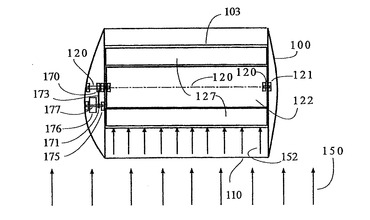
【図7】
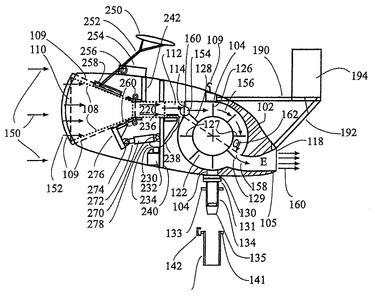
【図8】
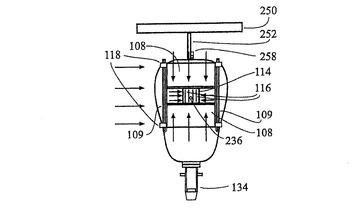
【図9】
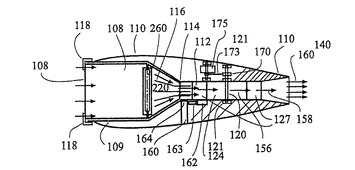
【図10】
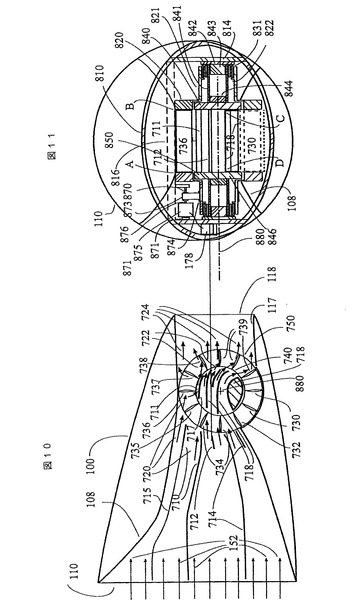
【図11】
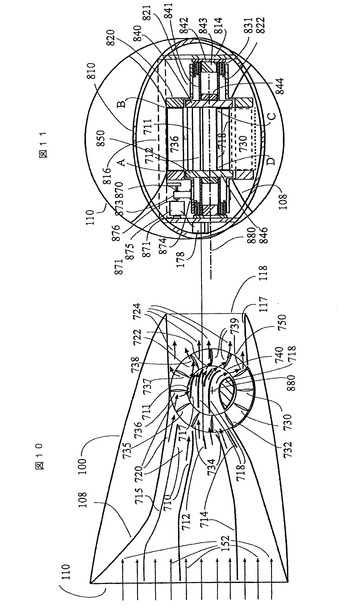
【図12】
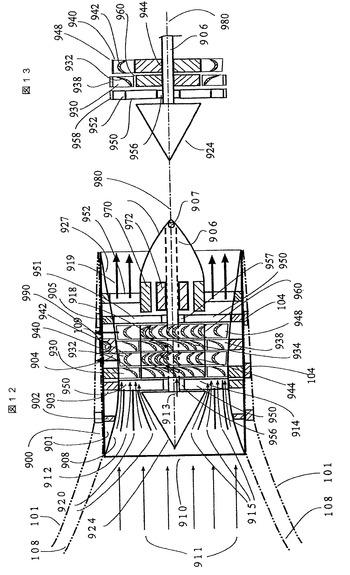
【図13】
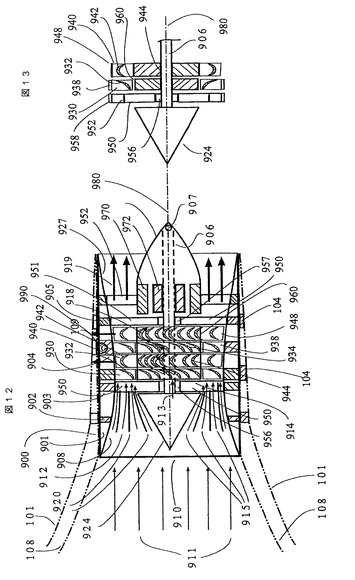
【図14】
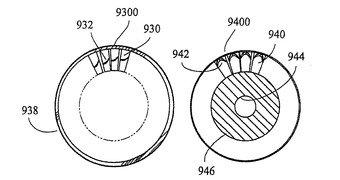
【図15】
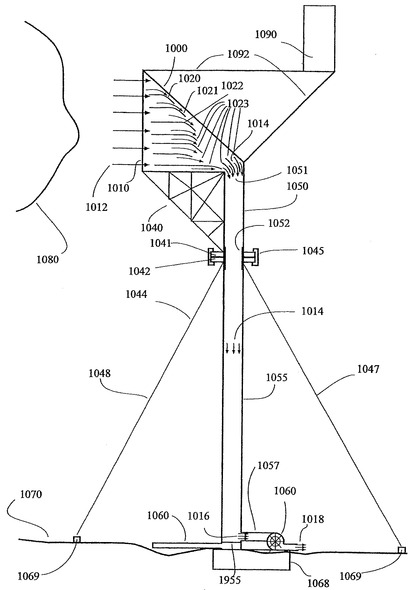
【図16】
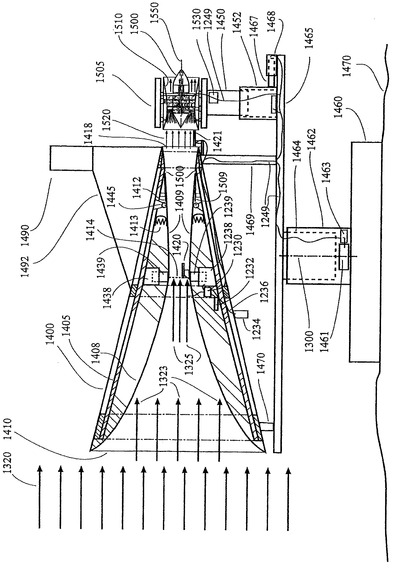
【図17】
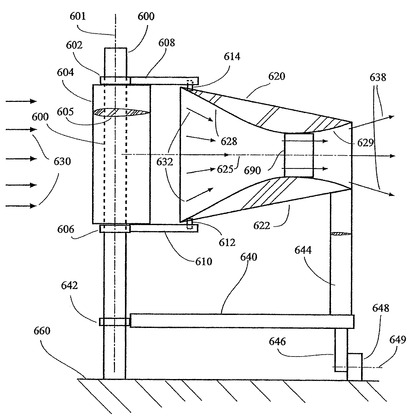
【図18】
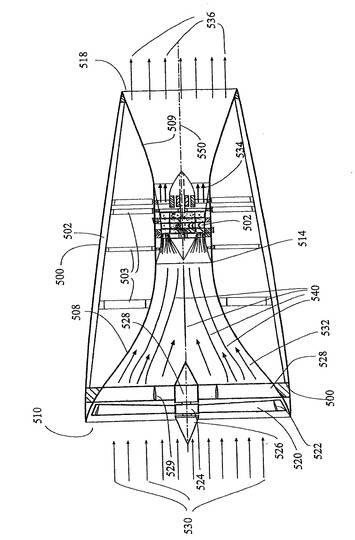
【図19】
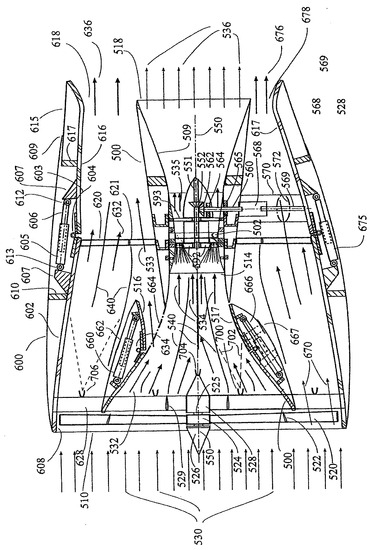
【図20】
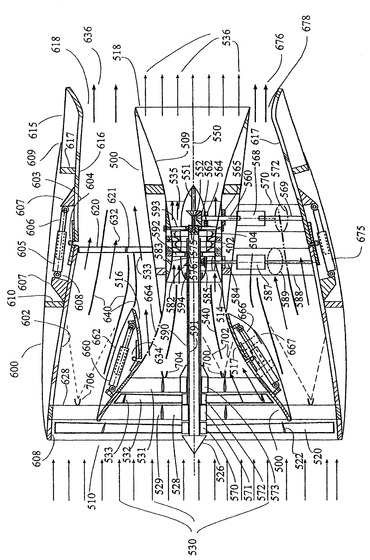
【図21】
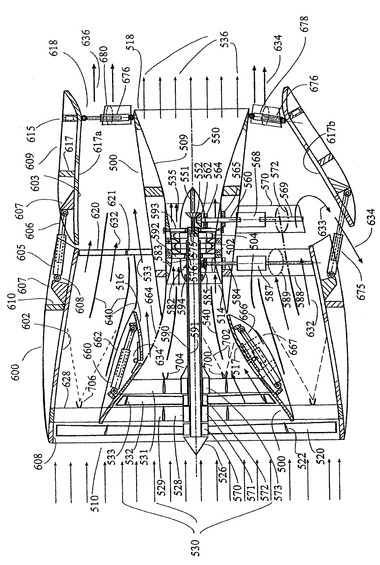
【図22】
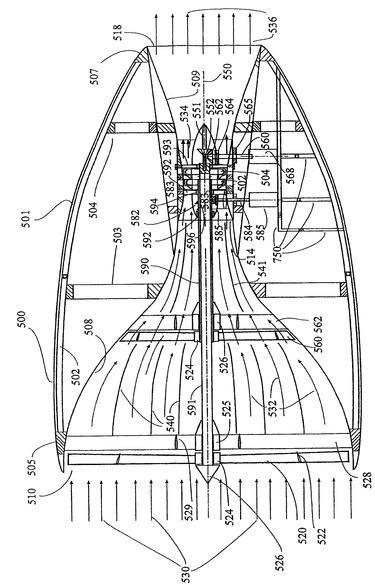
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2013−47518(P2013−47518A)
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願番号】特願2012−219784(P2012−219784)
【出願日】平成24年10月1日(2012.10.1)
【分割の表示】特願2007−542502(P2007−542502)の分割
【原出願日】平成17年11月16日(2005.11.16)
【出願人】(507160506)
【氏名又は名称原語表記】ISRAEL HIRSHBERG
【Fターム(参考)】
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願日】平成24年10月1日(2012.10.1)
【分割の表示】特願2007−542502(P2007−542502)の分割
【原出願日】平成17年11月16日(2005.11.16)
【出願人】(507160506)
【氏名又は名称原語表記】ISRAEL HIRSHBERG
【Fターム(参考)】
[ Back to top ]