
空港面監視方法及び空港面監視システム
【課題】 複数の目標が接近して一目標と認識してしまう程度の方位分解能である一次レーダであっても、二次レーダを利用して、方位分解能を擬似的に向上させ、近接した複数の目標の誤検出を減少させて、精度の高い航跡(統合航跡)を生成することが可能な空港面監視方法及び空港面監視システムを提供すること。
【解決手段】 一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーを間引き、前記一次レーダによる目標位置を検出して目標の航跡を得る。
【解決手段】 一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーを間引き、前記一次レーダによる目標位置を検出して目標の航跡を得る。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、空港面に存在する航空機などの目標の位置を一次レーダ及び二次レーダにより検出し、その航跡を監視する空港面監視方法及び空港面監視システムに関するものである。
【背景技術】
【0002】
従来、空港面の監視には、ASDE(Airport Surface Detection Equipment、空港面探知レーダ装置)のような一次レーダを用いたものや送信局からの質問波に対して航空機に搭載されたトランスポンダが返信波として、トランスポンダ信号(モードS)を三ヶ所以上の受信局で受信して時間差測位する装置であるMLAT(Multi−Lateration、マルチラテレーションシステム)のような二次レーダを用いたものが使用されている。また、ASDEから得られる目標位置と、目標に搭載されたトランスポンダからの返信波を受信するMLATから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させた空港面監視システムがある(例えば、特許文献1参照)。また、複数の航跡を統合する際に、その精度を向上させるという観点では、航跡データの重み付けを決めて統合するという航跡統合装置がある(例えば、特許文献2参照)。
【0003】
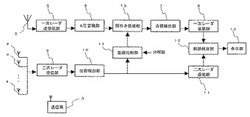
特許文献1には、空港面に電波を発射し、反射する電波を受信することによりレーダービデオ信号を生成して目標を検出・追尾するASDEと、目標(目標に搭載されたトランスポンダ)からのモードSトランスポンダ信号(返信波)を少なくとも3局受信局で受信し、その時刻差から目標の位置を検出・追尾するMLATと、それぞれの航跡を統合処理する航跡統合部と、統合航跡を表示する表示部を備えた空港面監視システムにおいて、MLATが出力する目標位置検出情報に基づいて、目標近傍の領域に対してはビデオレベル判定のスレッショルドレベルを下げ、目標近傍以外の領域に対しては上記ビデオレベル判定のスレッショルドレベルを上げるビデオレベル判定用マップ情報をビデオレベル判定部に出力するスレッショルドMAP作成処理部を有したことを特徴とする空港面監視システムが記載されている。
【0004】
特許文献2には、情報を処理する処理装置と、航跡入力部と、航跡精度算出部と、重み付け算出部と、統合航跡生成部とを有し、航跡入力部は処理装置を用いて、センサが目標を観測した観測データに基づいて推定した目標の航跡を表すセンサ航跡データを入力し、航跡精度算出部は処理装置を用いて、センサ航跡データに基づいてセンサ航跡データの精度を表す航跡精度評価値を算出し、重み付け算出部は処理装置を用いて、航跡精度評価値に基づいてセンサ航跡データの重み付けを表す航跡調整係数を算出し、統合航跡生成部は処理装置を用いて、航跡調整係数に基づいてセンサ航跡データを統合し、統合航跡データを生成することを特徴とする航跡統合装置が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−215018号公報
【特許文献2】特開2009−2794号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、一次レーダでは、方位分解能はビーム幅とレーダからの距離に依存しており、ASDEのような高分解能一次レーダでも、レーダからの距離が3.0kmの地点においては、約20mとなる。すなわち、3.0km地点において、二目標(例えば、航空機)が20m以内に接近した場合、ASDEでは1目標のみの検出となってしまい、検出位置の精度も悪くなるという課題があった。さらに、ASDEは単独でも追尾処理を行っているため、二目標の追尾を行っている途中で上記のように1目標の検出となった場合、一方の目標の追尾が正常に行われることなく、最終的にはコーストするという課題もあった。
【0007】
また、ASDEは、特許文献1に記載のように、MLATのような二次レーダとの統合処理が可能であるが、特許文献1に記載の統合方法では、ASDEの空港内の建物や航空機自身によるマルチパスの影響を考慮して、ASDEとMLATとの検出目標を統合処理するものであるので、MLATのような高精度で位置を検出する二次レーダとの統合処理において、ASDEの検出が1目標、MLATの検出が二目標であった場合、一方のMLAT検出目標は相関のあるASDE検出目標がないため、MLAT単独の統合航跡となり、もう一方のMLAT検出目標は位置精度の悪いASDEの検出目標と統合処理を行い、位置精度の悪い統合航跡が出力されるという課題があった。
【0008】
特許文献2に記載の航跡統合装置も、ASDE検出目標とMLAT検出目標との重み付けを行い、統合航跡を算出しているものであるので、このような、ASDEのような一次レーダの方位分解能が低い場合、つまり、複数の目標が接近して一目標と認識してしまう程度の方位分解能の場合には、特許文献1に記載のものと同様に、位置精度の悪い統合航跡が出力されるという課題があった。
【0009】
この発明は、上記のような課題を解消するためになされたもので、複数の目標が接近して一目標と認識してしまう程度の方位分解能である一次レーダであっても、二次レーダを利用して、方位分解能を擬似的に向上させ、近接した複数の目標(例えば、二目標)の誤検出を減少させて、精度の高い航跡(統合航跡)を生成することが可能な空港面監視方法及び空港面監視システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
請求項1の発明に係る空港面監視方法は、空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーを間引き、前記一次レーダによる目標位置を検出して目標の航跡を得ること特徴とするものである。
【0011】
請求項2の発明に係る空港面監視方法は、空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーのビデオレベルを下げて、前記一次レーダによる目標位置を検出して目標の航跡を得ること特徴とするものである。
【0012】
請求項3の発明に係る空港面監視方法は、空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーに対する目標検出用の閾値を上げて、前記一次レーダによる目標位置を検出して目標の航跡を得ること特徴とするものである。
【0013】
請求項4の発明に係る空港面監視方法は、前記二次レーダが、少なくとも三ヶ所の受信局により返信波を受信する請求項1〜3のいずれかに記載のものである。
【0014】
請求項5の発明に係る空港面監視方法は、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能が、前記一次レーダの空中線部から前記二次レーダが検出した二つの目標位置までの距離と前記一次レーダのビーム幅との積から算出された方位分解能、又は、前記一次レーダのパルス幅と光速との積から算出された距離分解能である請求項1〜4のいずれかに記載のものである。
【0015】
請求項6の発明に係る空港面監視方法は、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能が、予め前記一次レーダの空中線部から距離ごとに前記一次レーダのビーム幅から算出された方位分解能、又は、前記一次レーダのパルス幅と光速との積から算出された距離分解能から、前記一次レーダの空中線部から前記二次レーダが検出した二つの目標位置に対応するものを選択するものである請求項1〜4のいずれかに記載のものである。
【0016】
請求項7の発明に係る空港面監視システムは、空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視システムにおいて、目標に送信波を送信し、目標からの反射波を受信する一次レーダ空中線部と、この一次レーダ空中線部により受信された反射波を受信処理する一次レーダ送受信部と、この一次レーダ送受信部が受信処理したビデオ信号をA/D変換するA/D変換部と、このA/D変換部にA/D変換されたディジタルビデオ信号から目標を検出する目標検出部と、この目標検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する一次レーダ目標追尾部と、目標に搭載されたトランスポンダへ質問波を送信する送信局と、前記トランスポンダからの返信波を受信する少なくとも三ヶ所に設置される複数の二次レーダ空中線部と、この複数の二次レーダ空中線部が受信した前記トランスポンダからの返信波を受信処理する二次レーダ受信部と、この二次レーダ受信部が受信処理した前記返信波から前記トランスポンダを搭載した目標の位置を検出する位置検出部と、この位置検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する二次レーダ目標追尾部と、前記位置検出部により検出された二つの目標の目標間距離を算出し、この目標間距離と前記目標間距離に対応する前記一次レーダの分解能とを比較する距離比較部と、この距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引き、間引き後のディジタルビデオ信号を前記目標検出部に送る間引き処理部と、前記一次レーダ目標追尾部から得られた目標の航跡と前記二次レーダ目標追尾部から得られた目標の航跡とを統合する航跡統合部とを備えたことを特徴とするものである。
【0017】
請求項8の発明に係る空港面監視システムは、空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視システムにおいて、目標に送信波を送信し、目標からの反射波を受信する一次レーダ空中線部と、この一次レーダ空中線部により受信された反射波を受信処理する一次レーダ送受信部と、この一次レーダ送受信部が受信処理したビデオ信号をA/D変換するA/D変換部と、このA/D変換部にA/D変換されたディジタルビデオ信号から目標を検出する目標検出部と、この目標検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する一次レーダ目標追尾部と、目標に搭載されたトランスポンダへ質問波を送信する送信局と、前記トランスポンダからの返信波を受信する少なくとも三ヶ所に設置される複数の二次レーダ空中線部と、この複数の二次レーダ空中線部が受信した前記トランスポンダからの返信波を受信処理する二次レーダ受信部と、この二次レーダ受信部が受信処理した前記返信波から前記トランスポンダを搭載した目標の位置を検出する位置検出部と、この位置検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する二次レーダ目標追尾部と、前記一次レーダ空中線部から前記位置検出部が検出した二つの目標位置までの距離と前記一次レーダのビーム幅との積、又は、前記一次レーダのパルス幅と光速との積から前記位置検出部により検出された二つの目標における前記一次レーダの分解能を算出する分解能算出部と、前記位置検出部により検出された二つの目標の目標間距離を算出し、この目標間距離と前記目標間距離に対応する前記一次レーダの前記分解能算出部が算出した分解能とを比較する距離比較部と、この距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引き、間引き後のディジタルビデオ信号を前記目標検出部に送る間引き処理部と、前記一次レーダ目標追尾部から得られた目標の航跡と前記二次レーダ目標追尾部から得られた目標の航跡とを統合する航跡統合部とを備えたことを特徴とするものである。
【0018】
請求項9の発明に係る空港面監視システムは、空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視システムにおいて、目標に送信波を送信し、目標からの反射波を受信する一次レーダ空中線部と、この一次レーダ空中線部により受信された反射波を受信処理する一次レーダ送受信部と、この一次レーダ送受信部が受信処理したビデオ信号をA/D変換するA/D変換部と、このA/D変換部にA/D変換されたディジタルビデオ信号から目標を検出する目標検出部と、この目標検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する一次レーダ目標追尾部と、目標に搭載されたトランスポンダへ質問波を送信する送信局と、前記トランスポンダからの返信波を受信する少なくとも三ヶ所に設置される複数の二次レーダ空中線部と、この複数の二次レーダ空中線部が受信した前記トランスポンダからの返信波を受信処理する二次レーダ受信部と、この二次レーダ受信部が受信処理した前記返信波から前記トランスポンダを搭載した目標の位置を検出する位置検出部と、この位置検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する二次レーダ目標追尾部と、予め前記一次レーダが走査領域における分解能を保存する分解能データベース部と、前記位置検出部により検出された二つの目標の目標間距離を算出し、この目標間距離と前記目標間距離に対応し、前記分解能データベース部に保存された前記一次レーダの分解能と比較する距離比較部と、この距離比較部が前記目標間距離と前記目標間距離に対応し、前記分解能データベース部に保存された前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引き、間引き後のディジタルビデオ信号を前記目標検出部に送る間引き処理部と、前記一次レーダ目標追尾部から得られた目標の航跡と前記二次レーダ目標追尾部から得られた目標の航跡とを統合する航跡統合部とを備えたことを特徴とするものである。
【0019】
請求項10の発明に係る空港面監視システムは、前記間引き処理部が、前記距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分のビデオレベルを下げて、前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引く請求項7〜9のいずれかに記載のものである。
【0020】
請求項11の発明に係る空港面監視システムは、前記間引き処理部が、前記距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分に対する目標検出用の閾値を上げて、前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引く請求項7〜9のいずれかに記載のものである。
【0021】
請求項12の発明に係る空港面監視システムは、空港面監視システムが、前記航跡統合部が統合した目標の航跡を表示する表示部を有する請求項7〜11のいずれかに記載のものである。
【発明の効果】
【0022】
以上のように、請求項1〜6に係る発明によれば、二次レーダと連携して一次レーダの分解能を擬似的に上げることができるので、一次レーダの分解能が低い場合でも、一次レーダが追尾している複数の目標の情報と二次レーダが追尾している目標の情報精度とを統合しても、追尾の精度が下がる可能性が低い空港面監視方法を得ることができる。
【0023】
請求項7〜12に係る発明によれば、二次レーダと連携して一次レーダの分解能を擬似的に上げることができるので、一次レーダの分解能が低い場合でも、一次レーダが追尾している複数の目標の情報と二次レーダが追尾している目標の情報精度とを統合しても、追尾の精度が下がる可能性が低い空港面監視システムを得ることができる。
【図面の簡単な説明】
【0024】
【図1】この発明の実施の形態1に係る空港面監視システムの構成を示すブロック図である。
【図2】この発明の実施の形態1に係る空港面監視システムを運用する空港面の模式図である。
【図3】この発明の実施の形態1に係る空港面監視システムの動作を説明するための動作説明図である。
【図4】この発明の実施の形態1に係る空港面監視システムの動作を説明するための動作説明図である。
【図5】この発明に係る空港面監視システムの一次レーダ空中線部から送信された送信信号を近接した二つの目標上を走査する様子を示した模式図である。
【図6】この発明の実施の形態1に係る空港面監視システムの構成を示すブロック図である。
【図7】この発明の実施の形態1に係る空港面監視システムの構成を示すブロック図である。
【図8】この発明の実施の形態2に係る空港面監視システムの構成を示すブロック図である。
【図9】この発明の実施の形態2に係る空港面監視システムの動作を説明するための動作説明図である。
【図10】この発明の実施の形態3に係る空港面監視システムの構成を示すブロック図である。
【図11】この発明の実施の形態3に係る空港面監視システムの動作を説明するための動作説明図である。
【図12】この発明の実施の形態3に係る空港面監視システムの動作を説明するための動作説明図である。
【図13】この発明の実施の形態4に係る空港面監視システムの構成を示すブロック図である。
【図14】この発明の実施の形態4に係る空港面監視システムの動作を説明するための動作説明図である。
【発明を実施するための形態】
【0025】
本願の実施の形態では、一次レーダにASDEを使用し、二次レーダにMLATを使用する場合を前提に説明を行うが、使用するシステムをASDEやMLATに限定するものではなく、空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させるものであればよい。
【0026】
実施の形態1.
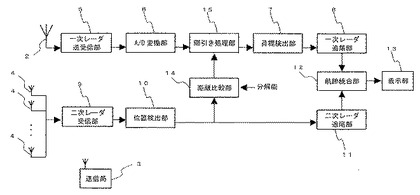
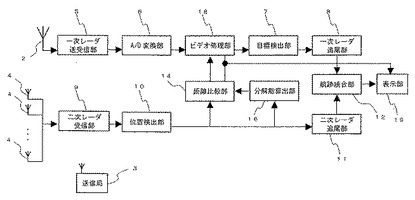
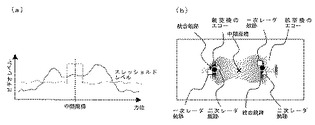
この発明の実施の形態1について図1〜5を用いて説明する。図3(a)は二つの目標(航空機)が方位方向に近接した場合の一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図、図3(b)は目標のエコーと統合航跡を示す図、図4(a)は二つの目標(航空機)が方位方向に近接した場合に擬似的に分解能を上げた一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図、図4(b)は目標のエコーと統合航跡を示す図ある。また、以下に述べる実施の形態の説明において、「〜部」として説明するものは、「〜回路」、「〜装置」、「〜機器」であってもよく、また、「〜ステップ」、「〜手順」、「〜処理」であってもよい。図1〜5において、1は航空機などの空港面上に存在する複数の目標、2は空港面を走査し、目標1に送信波を送信して目標からの反射波を受信する一次レーダ空中線部であり、その走査方法は、空中線部分を上下左右に動かせる、又は、回動させる機械的なものや、複数の空中線素子(アンテナ素子)が受信した電波を合成して旋回や俯仰する電気的なものが挙げられる。3は目標に搭載されたトランスポンダに質問波を送信する送信局、4は目標1に搭載されたトランスポンダからの返信波を受信する少なくとも三ヶ所に設置される複数の二次レーダ空中線部、5は一次レーダ空中線部2により受信された反射波を受信処理し、また、一次レーダ空中線部2が目標に対して放射する送信波を送信処理する一次レーダ送受信部である。送信側の処理に関しては、従来技術と同様なので説明や図示は省略する。6は一次レーダ送受信部5が受信処理したビデオ信号をA/D変換してディジタルビデオ信号にするA/D変換部、7はA/D変換部6から送られたディジタルビデオ信号から目標を検出する目標検出部、8は目標検出部7により順次検出される目標の位置の経時変化から目標の航跡を追尾する一次レーダ目標追尾部である。図中、同一符号は、同一又は相当部分を示しそれらについての詳細な説明は省略する。
【0027】
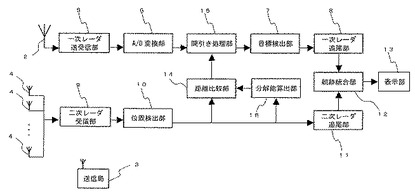
図1〜5において、9は複数の二次レーダ空中線部4により受信された返信波を受信処理する二次レーダ受信部であり、複数の二次レーダ空中線部4ごとに設けてもよい。10は少なくとも三ヶ所の二次レーダ空中線部4が受信し、二次レーダ受信部9が受信処理した目標1のトランスポンダからの返信波から時間差測位を行うことにより、トランスポンダ1を搭載した目標1の位置を検出する位置検出部、11は位置検出部10により順次検出される目標の位置の経時変化から目標の航跡を追尾する二次レーダ目標追尾部である。二次レーダ空中線部4,二次レーダ受信部9,位置検出部10,二次レーダ追尾部11が受信局の中核となっている。12は一次レーダ目標追尾部8から得られた目標1の航跡と二次レーダ目標追尾部11から得られた目標1の航跡とを統合する航跡統合部、13は航跡統合部12が統合した目標1の航跡を表示し、目標1が複数であっても表示を行う表示部である。14は位置検出部10により検出された目標1が二つ以上のときに、二つの目標におけるそれぞれの目標間距離を算出し、この目標間距離と目標間距離に対応する一次レーダの分解能とをそれぞれ比較する距離比較部、15は距離比較部14が目標間距離と一次レーダの分解能とを比較した結果、目標間距離よりも一次レーダの分解能が大きいときは、A/D変換部6にA/D変換されたディジタルビデオ信号から目標間距離の中間座標及び中間座標の周辺に相当する部分を間引き、間引き後のディジタルビデオ信号を目標検出部7に送る間引き処理部である。図中、同一符号は、同一又は相当部分を示しそれらについての詳細な説明は省略する。
【0028】
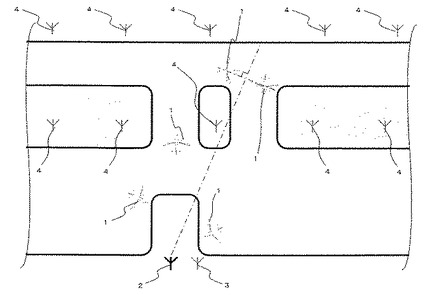
次に動作について説明する。図2は実施の形態1に係る空港面監視システムを運用している空港面の模式図である。空港面には、五機の航空機が存在している。この五機の航空機が実施の形態1に係る空港面監視システムにより監視される複数の目標1となる。このような空港面において、図1に記載の空港面監視システムは、一次レーダ送受信部5から送信処理された送信信号を一次レーダ空中線部2から送信信号を電波(送信波)として発し、前述の航空機等の目標1からの反射電波(反射波)を一次レーダ空中線部2にて受信し、一次レーダ送受信部5にて、受信した微弱電波信号を増幅および周波数変換してビデオ信号をA/D変換部6へ出力する。A/D変換部6は入力されたビデオ信号をディジタルビデオ信号に変換し、間引き処理部15へ出力する。
【0029】
ここで、二次レーダ受信部9は、送信局3から発された質問電波(質問波)に対する航空機等の目標1からのモードSトランスポンダ信号を受信し、モードS情報を位置検出部10へ出力する。位置検出部10は、少なくとも三ヶ所の二次レーダ空中線部4(二次レーダ受信部9)からのモードS情報を入力し、それぞれの二次レーダ空中線部4(二次レーダ受信部9)における受信時刻差から目標の位置を測位して、測位信号を二次レーダ追尾部11、距離比較部14へそれぞれ出力する。
【0030】
距離比較部14は、入力された測位信号を一次レーダの空中線を極とした極座標系に変換する。そして、距離が等しい測位信号が2つ以上ある場合に、それぞれの測位信号202の目標間距離を算出する。または、方位が等しい測位信号が2つ以上ある場合に、それぞれの測位信号の目標間距離を算出する。前者の場合は、一次レーダ空中線部2から目標1までの距離R[m]とビーム幅θ[rad]との積で方位分解能が算出できるので、測位信号の地点での方位分解能と目標間距離を比較し、方位分解能が目標間距離より大きい場合に目標間距離の中間座標を極座標系で算出して、中間座標情報を間引き処理部15へ出力する。後者の場合は、一次レーダ空中線部2が送信する送信電波のパルス幅[s]と光速[m/s]との積で距離分解能が算出できるので、それぞれの測位信号の地点での距離分解能と目標間距離を比較し、距離分解能が目標間距離より大きい場合に目標間距離の中間座標を極座標系で算出して、中間座標情報を間引き処理部15へ出力する。
【0031】
距離比較部14は、測位信号から得られる情報と、目標1間の距離が航空機等の大きさや空港面監視システムを運用する空港面のレイアウトとから、分解能と目標間距離を比較するまでもなく、一次レーダによって、複数の目標を一目標として誤認識する可能性が無い場合は、処理を行わないという選択をしてもよい。つまり、距離比較部14及び間引き処理部15以外の構成で空港面監視システムを運用することになる。距離比較部14の処理を行わないという判断は、位置検出部10が行ってもよいし、外部からの位置検出部10又は距離比較部14への入力によって行ってもよい。
【0032】
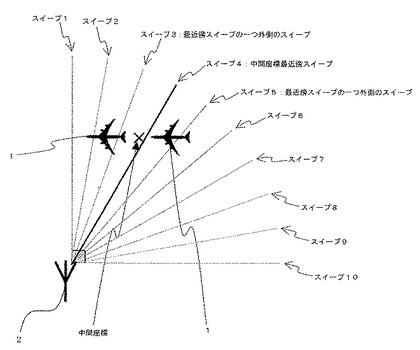
間引き処理部15は、中間座標情報が入力された場合、一次レーダ空中線部2から出力される方位信号であるACP(Azimuth Change Pulse:360°をn個のパルスでカウントする。nは整数)と一次レーダ空中線部2から出力される方位信号であり、メインビームが磁北を向いた時出力されるものであるARP(Azimuth Reference Pulse:ACP信号のカウントを0にする)を用いることで、中間座標に対応するACPカウント数を求める。さらに、求められたACPカウント数を用いることで、ディジタルビデオ信号から中間座標情報の最近傍スイープのディジタルビデオ信号を選択する。さらに、選択したディジタルビデオ信号から、中間座標情報に対応した地点を中心として、予め設定した任意の領域分(中間座標及び中間座標の周辺)を間引いたディジタルビデオ処理信号を目標検出部7へ出力する。ここで、図5は一次レーダ空中線部2から送信された送信信号を近接した二つの航空機(二つの目標1)上を走査する様子を示した模式図である。一次レーダ空中線部2からスイープ毎のパルス送信方向(角度)を模式的に線で示している。簡便のため、90°を10スイープで表現しているが、実際には、より多くのスイープ(空間にパルスを送信して、次のパルスを送信するまでの時間、若しくは、次のパルスを送信するまでに受信されたビデオ及びデータ)となる。図5において、二つの航空機(二つの目標1)の中間座標が得られたとき、中間座標の最近傍スイープはスイープ4となり、最近傍スイープの一つ外側のスイープはスイープ3及び5となる。なお、中間座標最近傍スイープ(スイープ4)は他のスイープよりも太い線で示している。
【0033】
目標検出部7は、間引き処理部15から入力されたディジタルビデオ信号(ディジタルビデオ処理信号)から目標1の位置情報である目標情報を検出する。目標検出アルゴリズムはここでは特に指定しないが、検出データを生成して、一次レーダ追尾部8へ出力するものである。一次レーダ追尾部8は、目標検出部7から入力された目標信号の追尾処理を行う。追尾アルゴリズムはここでは特に指定しないが、一次レーダ航跡データを生成して、航跡統合部12へ出力する。一方、二次レーダ追尾部11は、位置検出部10から入力された測位信号の追尾処理を行う。追尾アルゴリズムはここでは特に指定しないが、二次レーダ追尾データを生成して、航跡統合部12へ出力する。
【0034】
航跡統合部12は、一次レーダ追尾部8から入力された一次レーダ航跡データと一二次レーダ追尾部11から入力された二次レーダ追尾データの相関・統合処理を行う。相関・統合アルゴリズムはここでは特に指定しないが、統合航跡を生成して、表示部13へ出力する。表示部13は、航跡統合部12から入力された統合航跡を表示する。表示アルゴリズムはここでは特に指定しない。このような、二次レーダが検出した二つの目標位置の目標間距離が、二次レーダが検出した二つの目標位置における一次レーダの分解能(方位分解能又は距離分解能)よりも小さいときに、目標間距離の中間座標及び中間座標の周辺に相当する一次レーダによる目標のエコーを間引き、一次レーダによる目標位置を検出して目標の航跡を得る処理から構成される方法により、近接する二つの目標1間の距離が一次レーダの分解能よりも低い場合でも、一次レーダが追尾している複数の目標の情報と二次レーダが追尾している目標の情報精度とを統合しても、追尾の精度低下を抑制できる。
【0035】
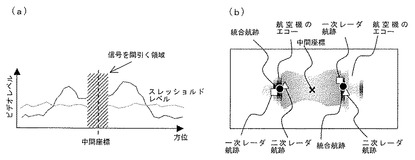
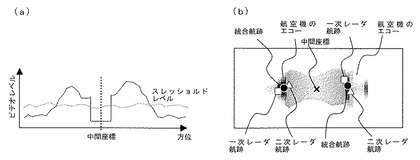
ここで、図3及び図4を用いて、従来の空港面監視システムと実施の形態1に係る空港面監視システムの動作を説明する。図3は従来の空港面監視システムの動作であり、図4は中間座標情報が入力された場合の間引き処理部15を含む空港面監視システムの動作である。図3(a)は2つの目標1(航空機)が方位方向に近接した場合、一次レーダにおける、目標のエコーのビデオレベル(ディジタルビデオ信号)を示している。例えば、図2に記載の一次レーダ空中線部2のビームと直角方向(ビーム方向と直角方向、共に一点鎖線で図示)に並んだ二つの目標1のような状態である。図3(a)は簡便のため、横軸を方位方向に設定しているが、実際に得られるビデオレベルは距離方向である。図3(b)は目標1のエコーと統合航跡がどのように表示されるかを示している。ただし、一次レーダ航跡および二次レーダ航跡は表示部13に表示されないことを前提にしているが、表示させてもよいことを前提にしているが、表示させてもよい。
【0036】
図3(a)に示すように、2つの目標1が方位方向に近接すると、一次レーダの方位分解能の許容値を超えてしまい、2つの目標1間のビデオレベルがスレッショルドレベルを超え、2つの目標1の分離が不可となる。その結果、図3(b)に示すように、一次レーダ航跡は1つしか出力されないが、二次レーダでは受信時刻差を利用して測位することから、航跡は正常に2つ出力される。二次レーダ航跡の一方は前回の航跡と相関処理を行うが、もう一方は一次レーダ航跡との相関・統合処理を行うことになり、最終的に出力される統合航跡の位置精度が低下することになる。
【0037】
一方、図4は実施の形態1に係る空港面監視システムを使用する場合の動作を説明するためのものであり、図4(a)は図3(a)と同様に、2つの目標1(航空機)が方位方向に近接した場合の、一次レーダにおける、目標のエコーのビデオレベル(ディジタルビデオ処理信号)を示している。例えば、図2に記載の一次レーダ空中線部2のビームと直角方向(ビーム方向と直角方向、共に一点鎖線で図示)に並んだ二つの目標1のような状態である。簡便のため、横軸を方位方向に設定しているが、実際に得られるビデオレベルは距離方向である。図4(b)は目標のエコーと統合航跡がどのように表示されるかを示している。ただし、一次レーダ航跡および二次レーダ航跡および中間座標は表示部に表示されないことを前提にしているが、表示させてもよい。
【0038】
図4(a)に示すように、実施の形態1に係る空港面監視システムでは、前述の二つの目標1間における距離である目標間距離と方位分解能との比較結果から得られる中間座標(中間座標及び中間座標の周辺)により行われる間引き処理部15の動作によって、2つの目標1間における中間座標近傍のビデオレベルを間引いており、2つの目標1の分離が可能となる。その結果、図4(b)に示すように、一次レーダ及び二次レーダともに航跡は2つ出力され、それぞれの航跡の相関・統合処理を行うことで最終的に出力される統合航跡の位置精度が向上する。なお、2つの目標1が距離方向(一次レーダのビーム方向)に近接した場合は、方位分解能に代えて、距離分解能を用いて、同様の処理を行えばよい。
【0039】
このように、実施の形態1に係る空港面監視システムは、一次レーダと二次レーダそれぞれを用いて目標を検出および追尾し、それぞれの航跡を相関・統合する。近接した2つの目標1を一次レーダより検出する場合、二次レーダの検出結果を用いて、一次レーダのディジタルビデオから二目標間のビデオレベルの一部を間引くにより、目標検出部7に入力されるディジタルビデオ信号(ディジタルビデオ処理信号)において、中間座標及び中間座標の周辺に相当する部分のビデオレベルがスレッショルドレベルを超えることはないので、一次レーダの目標検出確度を向上することができ、精度の高い統合航跡を生成することが可能となる。
【0040】
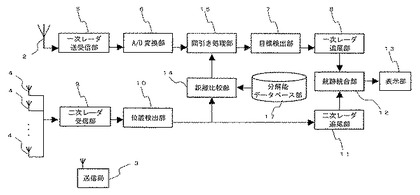
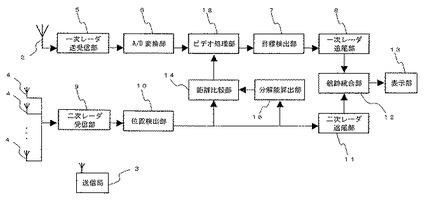
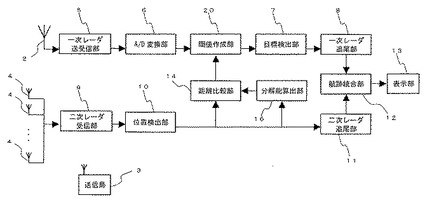
次に、この発明の実施の形態1に係る距離比較部14が得る分解能について図6及び7を用いて説明する。図6及び7において、16は位置検出部10が検出した目標1の位置から、一次レーダ空中線部2から二次レーダが検出した二つの目標位置までの距離と一次レーダのビーム幅との積から方位分解能を算出、又は、一次レーダのパルス幅と光速との積から距離分解能を算出するの分解能算出部、17は予め一次レーダの走査領域における方位分解能又は距離分解能、若しくは、方位分解能及び距離分解能の両方が保存された分解能データベース部である。図1に係る空港面監視システムは、分解能を外部から得ていたが、図6及び7に係る空港面監視システムは、空港面監視システム内に距離比較部14に分解能の情報を供給する構成を有する場合について説明する。基本的な動作は、図1に係る空港面監視システムと同じであるので、異なる部分を中心に説明を行う。
【0041】
図6に係る空港面監視システムにおいて、分解能算出部16は位置検出部10が検出した複数の目標1の測位信号を受けて、複数の目標1のうち、一次レーダ空中線部2から見て異なる方位かつ同じ距離の二つの目標までの距離と一次レーダ空中線部2のビーム幅の積から方位分解能を算出、若しくは、複数の目標1のうち、一次レーダ空中線部2から見て同じ方位の目標に対応し、一次レーダ空中線部2から送信される送信波のパルス幅と光速との積から得られる距離分解能を算出する。この分解能算出部16で算出された分解能は、距離比較部14に送られる。分解能の供給後の距離比較部14での処理は前述の通りである。
【0042】
図7に係る空港面監視システムにおいて、分解能データベース部17は予め一次レーダ空中線部2の走査領域における方位分解能又は距離分解能、若しくは、その両方が保存されるのである。分解能データベース部17の距離比較部14への分解能の供給は、距離比較部14からの指示で行う場合は、距離比較部14経由で位置検出部10が検出する目標1の測位信号から、対応する分解能を距離比較部14へ供給してもよいし、図示は省略するが、分解能算出部16と同じように、位置検出部10から目標1の測位信号を得て、対応する分解能を選び、そして、距離比較部14へ供給してもよい。分解能の供給後の距離比較部14での処理は前述の通りである。
【0043】
次に、分解能データベース部17を更に詳しく説明する。分解能データベース部17は、入力された測位信号と一次レーダ空中線部2との距離を算出し、地点での方位分解能及び距離分解能を分解能データベース部17内のデータベースから読み出し、測位信号に対応した分解能の情報(分解能データ)を距離比較部14へ出力する。分解能データベース部17には、例えば、一次レーダからの距離10m毎に分解能データを格納しておく。このように、方位方向に近接した2つの目標1をだけでなく、距離方向に近接した2つの目標1を分離して検出することが可能であると同時に、計算量は減少している。その結果、一次レーダの目標検出確度をさらに向上することができ、さらに精度の高い統合航跡を生成することが可能となる。
【0044】
なお、後述の実施の形態2以降では、分解能算出部16により距離比較部14へ分解能を供給する場合を例に説明を行うが、この実施の形態1のように、外部から供給してもよいし、分解能データベース部17を用いて供給してもよい。
【0045】
実施の形態2.
この発明の実施の形態2について図8及び9を用いて説明する。図9(a)は二つの目標(航空機)が方位方向に近接した場合に擬似的に分解能を上げた一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図、図9(b)は目標のエコーと統合航跡を示す図ある。なお、実施の形態1と共通の部分の説明は省略し、異なる部分を中心に説明する。実施の形態1では、一次レーダの分解能を擬似的に上げるための処理を間引き処理部15が担っていたが、この実施の形態2では、間引き処理部15の間引き方の変形例を説明する。もちろん、この変形例は、間引き処理の一例としても解釈できることはいうまでもない。図8及び9において、18は距離比較部14が目標1間距離と一次レーダの分解能とを比較した結果、目標間距離よりも一次レーダの分解能が大きいときは、A/D変換部6にA/D変換されたディジタルビデオ信号から目標1間距離の中間座標及び中間座標の周辺に相当する部分のビデオレベルを目標検出部7における目標1検出用のスレッショルドレベルよりも下げるビデオ処理部である。図中、同一符号は、同一又は相当部分を示しそれらについての詳細な説明は省略する。
【0046】
ビデオ処理部18は、中間座標情報が入力された場合、一次レーダ空中線部2から出力される方位信号であるACP(Azimuth Change Pulse、図示なし)と一次レーダ空中線部2から出力される方位信号であり、メインビームが磁北を向いた時出力されるものであるARP(Azimuth Reference Pulse、図示なし)を用いて、ディジタルビデオ信号から中間座標情報の最近傍スイープのディジタルビデオ信号を選択する。さらに、選択したディジタルビデオ信号から、中間座標情報に対応した地点を中心として、予め設定した任意の領域分(中間座標及び中間座標の周辺)ののビデオレベルを下げたディジタルビデオ処理信号を目標検出部7へ出力する。ここで、図5は一次レーダ空中線部2から送信された送信信号を近接した二つの航空機(二つの目標1)上を走査する様子を示した模式図である。一次レーダ空中線部2からスイープ毎のパルス送信方向(角度)を模式的に線で示している。なお、中間座標最近傍スイープ(スイープ4)は他のスイープよりも太い線で示している。簡便のため、90°を10スイープで表現しているが、実際には、より多くのスイープ(空間にパルスを送信して、次のパルスを送信するまでの時間、若しくは、次のパルスを送信するまでに受信されたビデオ及びデータ)となる。以下の処理は、実施の形態1に係る空港面監視システムと同じであるので、省略する。
【0047】
したがって、二次レーダが検出した二つの目標位置の目標間距離が、二次レーダが検出した二つの目標位置における一次レーダの分解能よりも小さいときに、目標間距離の中間座標及び中間座標の周辺に相当する一次レーダによる目標のエコーのビデオレベルを下げて、一次レーダによる目標位置を検出して目標の航跡を得る処理から構成される方法により、近接する二つの目標1間の距離が一次レーダの分解能よりも低い場合でも、一次レーダが追尾している複数の目標の情報と二次レーダが追尾している目標の情報精度とを統合しても、追尾の精度低下を抑制できる。
【0048】
ここで、図9を用いて、従来の空港面監視システムと実施の形態2に係る空港面監視システムの動作を説明する。図3(a)に示すように、2つの目標1が方位方向に近接すると、一次レーダの方位分解能の許容値を超えてしまい、2つの目標1間のビデオレベルがスレッショルドレベルを超え、2つの目標1の分離が不可となる。その結果、図3(b)に示すように、一次レーダ航跡は1つしか出力されないが、二次レーダでは受信時刻差を利用して測位することから、航跡は正常に2つ出力される。二次レーダ航跡の一方は前回の航跡と相関処理を行うが、もう一方は一次レーダ航跡との相関・統合処理を行うことになり、最終的に出力される統合航跡の位置精度が低下することになる。
【0049】
一方、図9は実施の形態2に係る空港面監視システムを使用する場合の動作を説明するためのものであり、図9(a)は図3(a)と同様に、2つの目標1(航空機)が方位方向に近接した場合の、一次レーダにおける、目標のエコーのビデオレベル(ディジタルビデオ処理信号)を示している。例えば、図2に記載の一次レーダ空中線部2のビームと直角方向(ビーム方向と直角方向、共に一点鎖線で図示)に並んだ二つの目標1のような状態である。簡便のため、横軸を方位方向に設定しているが、実際に得られるビデオレベルは距離方向である。図9(b)は目標のエコーと統合航跡がどのように表示されるかを示している。ただし、一次レーダ航跡および二次レーダ航跡および中間座標は表示部に表示されないことを前提にしているが、表示させてもよい。
【0050】
図9(a)に示すように、実施の形態2に係る空港面監視システムでは、前述の二つの目標1間における距離である目標間距離と方位分解能との比較結果から得られる中間座標(中間座標及び中間座標の周辺)により行われるビデオ処理部18の動作によって、2つの目標1間における中間座標近傍のビデオレベルをスレッショルドレベルよりも下げており、2つの目標1の分離が可能となる。その結果、図9(b)に示すように、一次レーダ及び二次レーダともに航跡は2つ出力され、それぞれの航跡の相関・統合処理を行うことで最終的に出力される統合航跡の位置精度が向上する。なお、2つの目標1が距離方向(一次レーダのビーム方向)に近接した場合は、方位分解能に代えて、距離分解能を用いて、同様の処理を行えばよい。
【0051】
このように、実施の形態2に係る空港面監視システムは、一次レーダと二次レーダそれぞれを用いて目標を検出および追尾し、それぞれの航跡を相関・統合する。近接した2つの目標1を一次レーダより検出する場合、二次レーダの検出結果を用いて、一次レーダのディジタルビデオから二目標間のビデオレベルを一部下げることにより、目標検出部7に入力されるディジタルビデオ信号(ディジタルビデオ処理信号)において、中間座標及び中間座標の周辺に相当する部分のビデオレベルがスレッショルドレベルを超えることはないので、一次レーダの目標検出確度を向上することができ、精度の高い統合航跡を生成することが可能となる。
【0052】
実施の形態3.
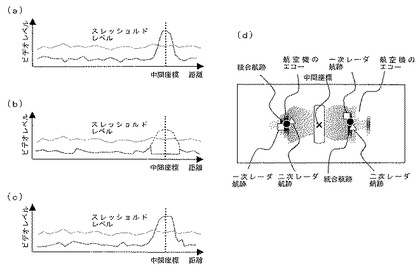
この発明の実施の形態3について図10〜12を用いて説明する。図11(a)(c)は二つの目標(航空機)が方位方向に近接した場合に擬似的に分解能を上げた一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図(中間座標最近傍から一つ外側のスイープである。図5においては、スイープ3又はスイープ5に相当する。)、図11(b)は二つの目標(航空機)が方位方向に近接した場合に擬似的に分解能を上げた一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図(中間座標最近傍のスイープである。図5においては、スイープ4に相当する。)、図11(d)は目標のエコーと統合航跡を示す図、図12(a)(c)は二つの目標(航空機)が方位方向に近接した場合に擬似的に分解能を上げた一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図(中間座標最近傍から一つ外側のスイープである。図5においては、スイープ3又はスイープ5に相当する。)、図12(b)は二つの目標(航空機)が方位方向に近接した場合に擬似的に分解能を上げた一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図(中間座標最近傍のスイープ)、図12(d)は目標のエコーと統合航跡を示す図である。
【0053】
図10〜12において、19は航跡統合部12が統合した目標1の航跡を表示し、目標1が複数であっても表示を行い、ディジタルビデオ処理も表示する表示部である。前述の実施の形態1及び2では、中間座標を用いてビデオレベルを間引く、又は、スレッショルドレベルよりも下げ、ディジタルビデオ処理信号を目標検出部のみに出力していたが、実施の形態3に係る空港面監視システムによるビデオ処理部18はディジタルビデオ処理信号を表示部19にも出力している。それ以外の構成ついては、実施の形態1及び2で説明したものと同様であるので、ここでは説明を省略する。
【0054】
ビデオ処理部18は、中間座標情報が入力された場合、一次レーダ空中線部2から出力されるACPとARPを用いて、ディジタルビデオ信号から中間座標情報の最近傍スイープのディジタルビデオ信号を選択する。さらに、選択したディジタルビデオ信号から、中間座標情報に対応した地点を中心とし、予め設定した任意の領域分のビデオレベルを下げ、ディジタルビデオ処理信号を目標検出部7および表示部19へ出力する。表示部19は統合航跡およびディジタルビデオ処理信号を表示する。
【0055】
ここで、図11を用いて実施の形態3に係る空港面監視システムの動作について説明する。図11(a)〜(c)は2つの目標1が方位方向に近接した場合の、一次レーダにおいて、実際に得られる目標のエコーのビデオレベル(ディジタルビデオ処理信号)を示しており、図11(b)が中間座標最近傍のスイープ、図11(a)(c)が中間座標最近傍から一つ外側のスイープを示している。図11(d)は目標1のエコーと統合航跡がどのように表示されるかを示している。ただし、一次レーダ航跡および二次レーダ航跡および中間座標は表示部に表示されないことを前提にしているが、表示させてもよい。
【0056】
図11(b)に示すように、実施の形態3では二目標の中間座標の最近傍スイープにおける中間座標地点から任意の領域のビデオレベルを下げており、2つの目標1の分離が可能となる。破線で示したものは、ビデオレベルを下げる前の状態である。また、図11(d)に示すように、表示部19に表示される目標のエコーの分離も可能となる。このように、実施の形態3に係る空港面監視システムは、近接した2つの目標1を分離して検出および表示することが可能である。その結果、一次レーダの目標検出確度を向上することができ、精度の高い統合航跡を生成することが可能となり、また、表示部における近接した二目標の視認性を向上することが可能となる。
【0057】
続いて、図12を用いて実施の形態3に係る空港面監視システムの動作について説明する。ビデオ処理部18は中間座標最近傍のスイープのみビデオレベルを下げていたが、実施の形態3では最近傍スイープのさらに外側のスイープのビデオレベルを下げている。それ以外の構成品については、実施の形態1及び2で説明したものと同様であるので、ここでは説明を省略する。
【0058】
ビデオ処理部18は、中間座標情報が入力された場合、一次レーダ空中線部2から出力されるACPとARPを用いて、ディジタルビデオ信号から中間座標情報の最近傍スイープのディジタルビデオ信号を選択する。さらに、選択したディジタルビデオ信号から、中間座標情報に対応した地点を中心とし、予め設定した任意の領域分のビデオレベルを下げる。ここで、最近傍スイープから外側のスイープのディジタルビデオ信号を、予め設定した任意の数n分選択する。なお、nは整数。次に、最近傍スイープの1つ外側のディジタルビデオ信号においては、中間座標情報に対応した地点を中心とし、予め設定した任意の領域はビデオレベルをそのままとし、中心から離れた地点のビデオレベルを下げる。すなわち、中間座標近傍のみビデオレベルはそのままとなる。
【0059】
同じように、最近傍スイープの2つ外側のディジタルビデオ信号においては、中間座標近傍のビデオレベルはそのままとするが、その領域は、1つ外側のディジタルビデオ信号において、ビデオレベルをそのままとした領域より大きいものとする。最近傍スイープのn個外側のディジタルビデオ信号まで、前述の条件でビデオレベルを下げ、ディジタルビデオ処理信号103を目標検出部7および表示部19へ出力する。
【0060】
ここで、図12を用いて本実施の形態に係る空港面監視システムの動作について説明する。図12(a)〜(c)は2つの目標1(航空機)が方位方向に近接した場合の、一次レーダにおいて、実際に得られる目標のエコーのビデオレベル(ディジタルビデオ処理信号)を示しており、(b)が中間座標最近傍のスイープ、(a)および(c)が中間座標最近傍から一つ外側のスイープを示している。つまり、選択するスイープ数nが1の場合である。図12(d)は目標のエコーと統合航跡がどのように表示されるかを示している。ただし、一次レーダ航跡および二次レーダ航跡および中間座標は表示部に表示されないことを前提にしているが、表示させてもよい。
【0061】
図12(a)、(c)に示すように、実施の形態3では二目標の中間座標の最近傍スイープにおける一つ外側のスイープのビデオレベルを下げており、その領域は中間座標地点から任意の領域分離れた領域となっている。選択スイープ数nが2以上のときは、二つ外側のスイープのビデオレベルを下げることになるが、その領域は一つ外側のスイープよりも小さい領域となる。つまり、中間座標近傍のビデオレベルをそのままにする領域が大きくなる。また、図12(b)で、ビデオレベルを下げていることから、目標1の分離は可能である。このとき、図12(d)に示すように、表示部において目標のエコーは分離して表示されるだけでなく、それぞれの形状もより図2に示す目標1のような航空機に近いものとなっている。
【0062】
このように、実施の形態3に係る空港面監視システムは、近接した2つの目標1を分離して検出および表示することが可能であり、また、最近傍スイープにおける一つ外側のスイープのビデオレベルを下げており、その領域は中間座標地点から任意の領域分離れた領域となっているので、表示する形状をより航空機に近づけている。その結果、一次レーダの目標検出確度を向上することができ、精度の高い統合航跡を生成することが可能となり、また、表示部19における近接した二目標の視認性をさらに向上することが可能となる。
【0063】
実施の形態4.
この発明の実施の形態4について図13及び14を用いて説明する。図14(a)は二つの目標(航空機)が方位方向に近接した場合に擬似的に分解能を上げた一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図、図14(b)は目標のエコーと統合航跡を示す図ある。なお、実施の形態1〜3と共通の部分の説明は省略し、異なる部分を中心に説明する。実施の形態1〜3では、一次レーダの分解能を擬似的に上げるための処理を間引き処理部15やビデオ処理部18が担っていたが、この実施の形態4では、ビデオ処理部18と同様に間引き処理部15の間引き方の変形例を説明する。もちろん、この変形例は、間引き処理の一例としても解釈できることはいうまでもない。図13及び14において、20は距離比較部14が目標間距離と一次レーダの分解能とを比較した結果、目標間距離よりも一次レーダの分解能が大きいときは、A/D変換部6にA/D変換されたディジタルビデオ信号から目標間距離の中間座標及び中間座標の周辺に相当する部分に対する目標検出用の閾値を上げる閾値作成部である。図中、同一符号は、同一又は相当部分を示しそれらについての詳細な説明は省略する。
【0064】
前述の実施の形態1〜3では、実施の形態4においては間引き処理部15及びビデオ処理部18に代えて、閾値作成部20を備え、閾値作成部20は中間座標を用いて中間座標近傍の閾値を上げる。それ以外の構成品ついては、実施の形態1〜3で説明したものと同様であるので、ここでは説明を省略する。閾値作成部20は、中間座標情報が入力された場合、一次レーダ空中線部2から出力されるACPとARPを用いて、ディジタルビデオ信号から中間座標情報の最近傍スイープのディジタルビデオ信号を選択する。さらに、選択したディジタルビデオ信号の、中間座標情報に対応した地点を中心として、予め設定した任意の領域分の閾値を上げ、閾値情報を目標検出部7へ出力する。なお、閾値を上げる程度は、通常の目標検出用の閾値では検出と判断されるディジタルビデオ信号が検出されない水準以上のものである。目標検出部7は入力された閾値情報を用いて、目標を検出する。閾値情報は、目標検出部7がもともと設定されていたスレッショルドレベルを変更(修正)するものでもあるとも解釈できるので、閾値作成部は、閾値変更(修正)部ともいえる。
【0065】
以上、説明を行った実施の形態1〜4に係る空港面監視方法及び空港面監視システムは、各実施の形態において、相互に構成要素を置換しても実施可能であることはいうまでもない。
【符号の説明】
【0066】
1・・目標、2・・一次レーダ空中線部、3・・送信局、4・・二次レーダ空中線部、5・・一次レーダ送受信部、6・・A/D変換部、7・・目標検出部、8・・一次レーダ目標追尾部、9・・二次レーダ受信部、10・・位置検出部、11・・二次レーダ目標追尾部、12・・航跡統合部、13・・表示部、14・・距離比較部、15・・間引き処理部、16・・分解能算出部、17・・分解能データベース部、18・・ビデオ処理部、19・・表示部、20・・閾値作成部。
【技術分野】
【0001】
この発明は、空港面に存在する航空機などの目標の位置を一次レーダ及び二次レーダにより検出し、その航跡を監視する空港面監視方法及び空港面監視システムに関するものである。
【背景技術】
【0002】
従来、空港面の監視には、ASDE(Airport Surface Detection Equipment、空港面探知レーダ装置)のような一次レーダを用いたものや送信局からの質問波に対して航空機に搭載されたトランスポンダが返信波として、トランスポンダ信号(モードS)を三ヶ所以上の受信局で受信して時間差測位する装置であるMLAT(Multi−Lateration、マルチラテレーションシステム)のような二次レーダを用いたものが使用されている。また、ASDEから得られる目標位置と、目標に搭載されたトランスポンダからの返信波を受信するMLATから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させた空港面監視システムがある(例えば、特許文献1参照)。また、複数の航跡を統合する際に、その精度を向上させるという観点では、航跡データの重み付けを決めて統合するという航跡統合装置がある(例えば、特許文献2参照)。
【0003】
特許文献1には、空港面に電波を発射し、反射する電波を受信することによりレーダービデオ信号を生成して目標を検出・追尾するASDEと、目標(目標に搭載されたトランスポンダ)からのモードSトランスポンダ信号(返信波)を少なくとも3局受信局で受信し、その時刻差から目標の位置を検出・追尾するMLATと、それぞれの航跡を統合処理する航跡統合部と、統合航跡を表示する表示部を備えた空港面監視システムにおいて、MLATが出力する目標位置検出情報に基づいて、目標近傍の領域に対してはビデオレベル判定のスレッショルドレベルを下げ、目標近傍以外の領域に対しては上記ビデオレベル判定のスレッショルドレベルを上げるビデオレベル判定用マップ情報をビデオレベル判定部に出力するスレッショルドMAP作成処理部を有したことを特徴とする空港面監視システムが記載されている。
【0004】
特許文献2には、情報を処理する処理装置と、航跡入力部と、航跡精度算出部と、重み付け算出部と、統合航跡生成部とを有し、航跡入力部は処理装置を用いて、センサが目標を観測した観測データに基づいて推定した目標の航跡を表すセンサ航跡データを入力し、航跡精度算出部は処理装置を用いて、センサ航跡データに基づいてセンサ航跡データの精度を表す航跡精度評価値を算出し、重み付け算出部は処理装置を用いて、航跡精度評価値に基づいてセンサ航跡データの重み付けを表す航跡調整係数を算出し、統合航跡生成部は処理装置を用いて、航跡調整係数に基づいてセンサ航跡データを統合し、統合航跡データを生成することを特徴とする航跡統合装置が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−215018号公報
【特許文献2】特開2009−2794号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、一次レーダでは、方位分解能はビーム幅とレーダからの距離に依存しており、ASDEのような高分解能一次レーダでも、レーダからの距離が3.0kmの地点においては、約20mとなる。すなわち、3.0km地点において、二目標(例えば、航空機)が20m以内に接近した場合、ASDEでは1目標のみの検出となってしまい、検出位置の精度も悪くなるという課題があった。さらに、ASDEは単独でも追尾処理を行っているため、二目標の追尾を行っている途中で上記のように1目標の検出となった場合、一方の目標の追尾が正常に行われることなく、最終的にはコーストするという課題もあった。
【0007】
また、ASDEは、特許文献1に記載のように、MLATのような二次レーダとの統合処理が可能であるが、特許文献1に記載の統合方法では、ASDEの空港内の建物や航空機自身によるマルチパスの影響を考慮して、ASDEとMLATとの検出目標を統合処理するものであるので、MLATのような高精度で位置を検出する二次レーダとの統合処理において、ASDEの検出が1目標、MLATの検出が二目標であった場合、一方のMLAT検出目標は相関のあるASDE検出目標がないため、MLAT単独の統合航跡となり、もう一方のMLAT検出目標は位置精度の悪いASDEの検出目標と統合処理を行い、位置精度の悪い統合航跡が出力されるという課題があった。
【0008】
特許文献2に記載の航跡統合装置も、ASDE検出目標とMLAT検出目標との重み付けを行い、統合航跡を算出しているものであるので、このような、ASDEのような一次レーダの方位分解能が低い場合、つまり、複数の目標が接近して一目標と認識してしまう程度の方位分解能の場合には、特許文献1に記載のものと同様に、位置精度の悪い統合航跡が出力されるという課題があった。
【0009】
この発明は、上記のような課題を解消するためになされたもので、複数の目標が接近して一目標と認識してしまう程度の方位分解能である一次レーダであっても、二次レーダを利用して、方位分解能を擬似的に向上させ、近接した複数の目標(例えば、二目標)の誤検出を減少させて、精度の高い航跡(統合航跡)を生成することが可能な空港面監視方法及び空港面監視システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
請求項1の発明に係る空港面監視方法は、空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーを間引き、前記一次レーダによる目標位置を検出して目標の航跡を得ること特徴とするものである。
【0011】
請求項2の発明に係る空港面監視方法は、空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーのビデオレベルを下げて、前記一次レーダによる目標位置を検出して目標の航跡を得ること特徴とするものである。
【0012】
請求項3の発明に係る空港面監視方法は、空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーに対する目標検出用の閾値を上げて、前記一次レーダによる目標位置を検出して目標の航跡を得ること特徴とするものである。
【0013】
請求項4の発明に係る空港面監視方法は、前記二次レーダが、少なくとも三ヶ所の受信局により返信波を受信する請求項1〜3のいずれかに記載のものである。
【0014】
請求項5の発明に係る空港面監視方法は、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能が、前記一次レーダの空中線部から前記二次レーダが検出した二つの目標位置までの距離と前記一次レーダのビーム幅との積から算出された方位分解能、又は、前記一次レーダのパルス幅と光速との積から算出された距離分解能である請求項1〜4のいずれかに記載のものである。
【0015】
請求項6の発明に係る空港面監視方法は、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能が、予め前記一次レーダの空中線部から距離ごとに前記一次レーダのビーム幅から算出された方位分解能、又は、前記一次レーダのパルス幅と光速との積から算出された距離分解能から、前記一次レーダの空中線部から前記二次レーダが検出した二つの目標位置に対応するものを選択するものである請求項1〜4のいずれかに記載のものである。
【0016】
請求項7の発明に係る空港面監視システムは、空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視システムにおいて、目標に送信波を送信し、目標からの反射波を受信する一次レーダ空中線部と、この一次レーダ空中線部により受信された反射波を受信処理する一次レーダ送受信部と、この一次レーダ送受信部が受信処理したビデオ信号をA/D変換するA/D変換部と、このA/D変換部にA/D変換されたディジタルビデオ信号から目標を検出する目標検出部と、この目標検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する一次レーダ目標追尾部と、目標に搭載されたトランスポンダへ質問波を送信する送信局と、前記トランスポンダからの返信波を受信する少なくとも三ヶ所に設置される複数の二次レーダ空中線部と、この複数の二次レーダ空中線部が受信した前記トランスポンダからの返信波を受信処理する二次レーダ受信部と、この二次レーダ受信部が受信処理した前記返信波から前記トランスポンダを搭載した目標の位置を検出する位置検出部と、この位置検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する二次レーダ目標追尾部と、前記位置検出部により検出された二つの目標の目標間距離を算出し、この目標間距離と前記目標間距離に対応する前記一次レーダの分解能とを比較する距離比較部と、この距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引き、間引き後のディジタルビデオ信号を前記目標検出部に送る間引き処理部と、前記一次レーダ目標追尾部から得られた目標の航跡と前記二次レーダ目標追尾部から得られた目標の航跡とを統合する航跡統合部とを備えたことを特徴とするものである。
【0017】
請求項8の発明に係る空港面監視システムは、空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視システムにおいて、目標に送信波を送信し、目標からの反射波を受信する一次レーダ空中線部と、この一次レーダ空中線部により受信された反射波を受信処理する一次レーダ送受信部と、この一次レーダ送受信部が受信処理したビデオ信号をA/D変換するA/D変換部と、このA/D変換部にA/D変換されたディジタルビデオ信号から目標を検出する目標検出部と、この目標検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する一次レーダ目標追尾部と、目標に搭載されたトランスポンダへ質問波を送信する送信局と、前記トランスポンダからの返信波を受信する少なくとも三ヶ所に設置される複数の二次レーダ空中線部と、この複数の二次レーダ空中線部が受信した前記トランスポンダからの返信波を受信処理する二次レーダ受信部と、この二次レーダ受信部が受信処理した前記返信波から前記トランスポンダを搭載した目標の位置を検出する位置検出部と、この位置検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する二次レーダ目標追尾部と、前記一次レーダ空中線部から前記位置検出部が検出した二つの目標位置までの距離と前記一次レーダのビーム幅との積、又は、前記一次レーダのパルス幅と光速との積から前記位置検出部により検出された二つの目標における前記一次レーダの分解能を算出する分解能算出部と、前記位置検出部により検出された二つの目標の目標間距離を算出し、この目標間距離と前記目標間距離に対応する前記一次レーダの前記分解能算出部が算出した分解能とを比較する距離比較部と、この距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引き、間引き後のディジタルビデオ信号を前記目標検出部に送る間引き処理部と、前記一次レーダ目標追尾部から得られた目標の航跡と前記二次レーダ目標追尾部から得られた目標の航跡とを統合する航跡統合部とを備えたことを特徴とするものである。
【0018】
請求項9の発明に係る空港面監視システムは、空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視システムにおいて、目標に送信波を送信し、目標からの反射波を受信する一次レーダ空中線部と、この一次レーダ空中線部により受信された反射波を受信処理する一次レーダ送受信部と、この一次レーダ送受信部が受信処理したビデオ信号をA/D変換するA/D変換部と、このA/D変換部にA/D変換されたディジタルビデオ信号から目標を検出する目標検出部と、この目標検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する一次レーダ目標追尾部と、目標に搭載されたトランスポンダへ質問波を送信する送信局と、前記トランスポンダからの返信波を受信する少なくとも三ヶ所に設置される複数の二次レーダ空中線部と、この複数の二次レーダ空中線部が受信した前記トランスポンダからの返信波を受信処理する二次レーダ受信部と、この二次レーダ受信部が受信処理した前記返信波から前記トランスポンダを搭載した目標の位置を検出する位置検出部と、この位置検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する二次レーダ目標追尾部と、予め前記一次レーダが走査領域における分解能を保存する分解能データベース部と、前記位置検出部により検出された二つの目標の目標間距離を算出し、この目標間距離と前記目標間距離に対応し、前記分解能データベース部に保存された前記一次レーダの分解能と比較する距離比較部と、この距離比較部が前記目標間距離と前記目標間距離に対応し、前記分解能データベース部に保存された前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引き、間引き後のディジタルビデオ信号を前記目標検出部に送る間引き処理部と、前記一次レーダ目標追尾部から得られた目標の航跡と前記二次レーダ目標追尾部から得られた目標の航跡とを統合する航跡統合部とを備えたことを特徴とするものである。
【0019】
請求項10の発明に係る空港面監視システムは、前記間引き処理部が、前記距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分のビデオレベルを下げて、前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引く請求項7〜9のいずれかに記載のものである。
【0020】
請求項11の発明に係る空港面監視システムは、前記間引き処理部が、前記距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分に対する目標検出用の閾値を上げて、前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引く請求項7〜9のいずれかに記載のものである。
【0021】
請求項12の発明に係る空港面監視システムは、空港面監視システムが、前記航跡統合部が統合した目標の航跡を表示する表示部を有する請求項7〜11のいずれかに記載のものである。
【発明の効果】
【0022】
以上のように、請求項1〜6に係る発明によれば、二次レーダと連携して一次レーダの分解能を擬似的に上げることができるので、一次レーダの分解能が低い場合でも、一次レーダが追尾している複数の目標の情報と二次レーダが追尾している目標の情報精度とを統合しても、追尾の精度が下がる可能性が低い空港面監視方法を得ることができる。
【0023】
請求項7〜12に係る発明によれば、二次レーダと連携して一次レーダの分解能を擬似的に上げることができるので、一次レーダの分解能が低い場合でも、一次レーダが追尾している複数の目標の情報と二次レーダが追尾している目標の情報精度とを統合しても、追尾の精度が下がる可能性が低い空港面監視システムを得ることができる。
【図面の簡単な説明】
【0024】
【図1】この発明の実施の形態1に係る空港面監視システムの構成を示すブロック図である。
【図2】この発明の実施の形態1に係る空港面監視システムを運用する空港面の模式図である。
【図3】この発明の実施の形態1に係る空港面監視システムの動作を説明するための動作説明図である。
【図4】この発明の実施の形態1に係る空港面監視システムの動作を説明するための動作説明図である。
【図5】この発明に係る空港面監視システムの一次レーダ空中線部から送信された送信信号を近接した二つの目標上を走査する様子を示した模式図である。
【図6】この発明の実施の形態1に係る空港面監視システムの構成を示すブロック図である。
【図7】この発明の実施の形態1に係る空港面監視システムの構成を示すブロック図である。
【図8】この発明の実施の形態2に係る空港面監視システムの構成を示すブロック図である。
【図9】この発明の実施の形態2に係る空港面監視システムの動作を説明するための動作説明図である。
【図10】この発明の実施の形態3に係る空港面監視システムの構成を示すブロック図である。
【図11】この発明の実施の形態3に係る空港面監視システムの動作を説明するための動作説明図である。
【図12】この発明の実施の形態3に係る空港面監視システムの動作を説明するための動作説明図である。
【図13】この発明の実施の形態4に係る空港面監視システムの構成を示すブロック図である。
【図14】この発明の実施の形態4に係る空港面監視システムの動作を説明するための動作説明図である。
【発明を実施するための形態】
【0025】
本願の実施の形態では、一次レーダにASDEを使用し、二次レーダにMLATを使用する場合を前提に説明を行うが、使用するシステムをASDEやMLATに限定するものではなく、空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させるものであればよい。
【0026】
実施の形態1.
この発明の実施の形態1について図1〜5を用いて説明する。図3(a)は二つの目標(航空機)が方位方向に近接した場合の一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図、図3(b)は目標のエコーと統合航跡を示す図、図4(a)は二つの目標(航空機)が方位方向に近接した場合に擬似的に分解能を上げた一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図、図4(b)は目標のエコーと統合航跡を示す図ある。また、以下に述べる実施の形態の説明において、「〜部」として説明するものは、「〜回路」、「〜装置」、「〜機器」であってもよく、また、「〜ステップ」、「〜手順」、「〜処理」であってもよい。図1〜5において、1は航空機などの空港面上に存在する複数の目標、2は空港面を走査し、目標1に送信波を送信して目標からの反射波を受信する一次レーダ空中線部であり、その走査方法は、空中線部分を上下左右に動かせる、又は、回動させる機械的なものや、複数の空中線素子(アンテナ素子)が受信した電波を合成して旋回や俯仰する電気的なものが挙げられる。3は目標に搭載されたトランスポンダに質問波を送信する送信局、4は目標1に搭載されたトランスポンダからの返信波を受信する少なくとも三ヶ所に設置される複数の二次レーダ空中線部、5は一次レーダ空中線部2により受信された反射波を受信処理し、また、一次レーダ空中線部2が目標に対して放射する送信波を送信処理する一次レーダ送受信部である。送信側の処理に関しては、従来技術と同様なので説明や図示は省略する。6は一次レーダ送受信部5が受信処理したビデオ信号をA/D変換してディジタルビデオ信号にするA/D変換部、7はA/D変換部6から送られたディジタルビデオ信号から目標を検出する目標検出部、8は目標検出部7により順次検出される目標の位置の経時変化から目標の航跡を追尾する一次レーダ目標追尾部である。図中、同一符号は、同一又は相当部分を示しそれらについての詳細な説明は省略する。
【0027】
図1〜5において、9は複数の二次レーダ空中線部4により受信された返信波を受信処理する二次レーダ受信部であり、複数の二次レーダ空中線部4ごとに設けてもよい。10は少なくとも三ヶ所の二次レーダ空中線部4が受信し、二次レーダ受信部9が受信処理した目標1のトランスポンダからの返信波から時間差測位を行うことにより、トランスポンダ1を搭載した目標1の位置を検出する位置検出部、11は位置検出部10により順次検出される目標の位置の経時変化から目標の航跡を追尾する二次レーダ目標追尾部である。二次レーダ空中線部4,二次レーダ受信部9,位置検出部10,二次レーダ追尾部11が受信局の中核となっている。12は一次レーダ目標追尾部8から得られた目標1の航跡と二次レーダ目標追尾部11から得られた目標1の航跡とを統合する航跡統合部、13は航跡統合部12が統合した目標1の航跡を表示し、目標1が複数であっても表示を行う表示部である。14は位置検出部10により検出された目標1が二つ以上のときに、二つの目標におけるそれぞれの目標間距離を算出し、この目標間距離と目標間距離に対応する一次レーダの分解能とをそれぞれ比較する距離比較部、15は距離比較部14が目標間距離と一次レーダの分解能とを比較した結果、目標間距離よりも一次レーダの分解能が大きいときは、A/D変換部6にA/D変換されたディジタルビデオ信号から目標間距離の中間座標及び中間座標の周辺に相当する部分を間引き、間引き後のディジタルビデオ信号を目標検出部7に送る間引き処理部である。図中、同一符号は、同一又は相当部分を示しそれらについての詳細な説明は省略する。
【0028】
次に動作について説明する。図2は実施の形態1に係る空港面監視システムを運用している空港面の模式図である。空港面には、五機の航空機が存在している。この五機の航空機が実施の形態1に係る空港面監視システムにより監視される複数の目標1となる。このような空港面において、図1に記載の空港面監視システムは、一次レーダ送受信部5から送信処理された送信信号を一次レーダ空中線部2から送信信号を電波(送信波)として発し、前述の航空機等の目標1からの反射電波(反射波)を一次レーダ空中線部2にて受信し、一次レーダ送受信部5にて、受信した微弱電波信号を増幅および周波数変換してビデオ信号をA/D変換部6へ出力する。A/D変換部6は入力されたビデオ信号をディジタルビデオ信号に変換し、間引き処理部15へ出力する。
【0029】
ここで、二次レーダ受信部9は、送信局3から発された質問電波(質問波)に対する航空機等の目標1からのモードSトランスポンダ信号を受信し、モードS情報を位置検出部10へ出力する。位置検出部10は、少なくとも三ヶ所の二次レーダ空中線部4(二次レーダ受信部9)からのモードS情報を入力し、それぞれの二次レーダ空中線部4(二次レーダ受信部9)における受信時刻差から目標の位置を測位して、測位信号を二次レーダ追尾部11、距離比較部14へそれぞれ出力する。
【0030】
距離比較部14は、入力された測位信号を一次レーダの空中線を極とした極座標系に変換する。そして、距離が等しい測位信号が2つ以上ある場合に、それぞれの測位信号202の目標間距離を算出する。または、方位が等しい測位信号が2つ以上ある場合に、それぞれの測位信号の目標間距離を算出する。前者の場合は、一次レーダ空中線部2から目標1までの距離R[m]とビーム幅θ[rad]との積で方位分解能が算出できるので、測位信号の地点での方位分解能と目標間距離を比較し、方位分解能が目標間距離より大きい場合に目標間距離の中間座標を極座標系で算出して、中間座標情報を間引き処理部15へ出力する。後者の場合は、一次レーダ空中線部2が送信する送信電波のパルス幅[s]と光速[m/s]との積で距離分解能が算出できるので、それぞれの測位信号の地点での距離分解能と目標間距離を比較し、距離分解能が目標間距離より大きい場合に目標間距離の中間座標を極座標系で算出して、中間座標情報を間引き処理部15へ出力する。
【0031】
距離比較部14は、測位信号から得られる情報と、目標1間の距離が航空機等の大きさや空港面監視システムを運用する空港面のレイアウトとから、分解能と目標間距離を比較するまでもなく、一次レーダによって、複数の目標を一目標として誤認識する可能性が無い場合は、処理を行わないという選択をしてもよい。つまり、距離比較部14及び間引き処理部15以外の構成で空港面監視システムを運用することになる。距離比較部14の処理を行わないという判断は、位置検出部10が行ってもよいし、外部からの位置検出部10又は距離比較部14への入力によって行ってもよい。
【0032】
間引き処理部15は、中間座標情報が入力された場合、一次レーダ空中線部2から出力される方位信号であるACP(Azimuth Change Pulse:360°をn個のパルスでカウントする。nは整数)と一次レーダ空中線部2から出力される方位信号であり、メインビームが磁北を向いた時出力されるものであるARP(Azimuth Reference Pulse:ACP信号のカウントを0にする)を用いることで、中間座標に対応するACPカウント数を求める。さらに、求められたACPカウント数を用いることで、ディジタルビデオ信号から中間座標情報の最近傍スイープのディジタルビデオ信号を選択する。さらに、選択したディジタルビデオ信号から、中間座標情報に対応した地点を中心として、予め設定した任意の領域分(中間座標及び中間座標の周辺)を間引いたディジタルビデオ処理信号を目標検出部7へ出力する。ここで、図5は一次レーダ空中線部2から送信された送信信号を近接した二つの航空機(二つの目標1)上を走査する様子を示した模式図である。一次レーダ空中線部2からスイープ毎のパルス送信方向(角度)を模式的に線で示している。簡便のため、90°を10スイープで表現しているが、実際には、より多くのスイープ(空間にパルスを送信して、次のパルスを送信するまでの時間、若しくは、次のパルスを送信するまでに受信されたビデオ及びデータ)となる。図5において、二つの航空機(二つの目標1)の中間座標が得られたとき、中間座標の最近傍スイープはスイープ4となり、最近傍スイープの一つ外側のスイープはスイープ3及び5となる。なお、中間座標最近傍スイープ(スイープ4)は他のスイープよりも太い線で示している。
【0033】
目標検出部7は、間引き処理部15から入力されたディジタルビデオ信号(ディジタルビデオ処理信号)から目標1の位置情報である目標情報を検出する。目標検出アルゴリズムはここでは特に指定しないが、検出データを生成して、一次レーダ追尾部8へ出力するものである。一次レーダ追尾部8は、目標検出部7から入力された目標信号の追尾処理を行う。追尾アルゴリズムはここでは特に指定しないが、一次レーダ航跡データを生成して、航跡統合部12へ出力する。一方、二次レーダ追尾部11は、位置検出部10から入力された測位信号の追尾処理を行う。追尾アルゴリズムはここでは特に指定しないが、二次レーダ追尾データを生成して、航跡統合部12へ出力する。
【0034】
航跡統合部12は、一次レーダ追尾部8から入力された一次レーダ航跡データと一二次レーダ追尾部11から入力された二次レーダ追尾データの相関・統合処理を行う。相関・統合アルゴリズムはここでは特に指定しないが、統合航跡を生成して、表示部13へ出力する。表示部13は、航跡統合部12から入力された統合航跡を表示する。表示アルゴリズムはここでは特に指定しない。このような、二次レーダが検出した二つの目標位置の目標間距離が、二次レーダが検出した二つの目標位置における一次レーダの分解能(方位分解能又は距離分解能)よりも小さいときに、目標間距離の中間座標及び中間座標の周辺に相当する一次レーダによる目標のエコーを間引き、一次レーダによる目標位置を検出して目標の航跡を得る処理から構成される方法により、近接する二つの目標1間の距離が一次レーダの分解能よりも低い場合でも、一次レーダが追尾している複数の目標の情報と二次レーダが追尾している目標の情報精度とを統合しても、追尾の精度低下を抑制できる。
【0035】
ここで、図3及び図4を用いて、従来の空港面監視システムと実施の形態1に係る空港面監視システムの動作を説明する。図3は従来の空港面監視システムの動作であり、図4は中間座標情報が入力された場合の間引き処理部15を含む空港面監視システムの動作である。図3(a)は2つの目標1(航空機)が方位方向に近接した場合、一次レーダにおける、目標のエコーのビデオレベル(ディジタルビデオ信号)を示している。例えば、図2に記載の一次レーダ空中線部2のビームと直角方向(ビーム方向と直角方向、共に一点鎖線で図示)に並んだ二つの目標1のような状態である。図3(a)は簡便のため、横軸を方位方向に設定しているが、実際に得られるビデオレベルは距離方向である。図3(b)は目標1のエコーと統合航跡がどのように表示されるかを示している。ただし、一次レーダ航跡および二次レーダ航跡は表示部13に表示されないことを前提にしているが、表示させてもよいことを前提にしているが、表示させてもよい。
【0036】
図3(a)に示すように、2つの目標1が方位方向に近接すると、一次レーダの方位分解能の許容値を超えてしまい、2つの目標1間のビデオレベルがスレッショルドレベルを超え、2つの目標1の分離が不可となる。その結果、図3(b)に示すように、一次レーダ航跡は1つしか出力されないが、二次レーダでは受信時刻差を利用して測位することから、航跡は正常に2つ出力される。二次レーダ航跡の一方は前回の航跡と相関処理を行うが、もう一方は一次レーダ航跡との相関・統合処理を行うことになり、最終的に出力される統合航跡の位置精度が低下することになる。
【0037】
一方、図4は実施の形態1に係る空港面監視システムを使用する場合の動作を説明するためのものであり、図4(a)は図3(a)と同様に、2つの目標1(航空機)が方位方向に近接した場合の、一次レーダにおける、目標のエコーのビデオレベル(ディジタルビデオ処理信号)を示している。例えば、図2に記載の一次レーダ空中線部2のビームと直角方向(ビーム方向と直角方向、共に一点鎖線で図示)に並んだ二つの目標1のような状態である。簡便のため、横軸を方位方向に設定しているが、実際に得られるビデオレベルは距離方向である。図4(b)は目標のエコーと統合航跡がどのように表示されるかを示している。ただし、一次レーダ航跡および二次レーダ航跡および中間座標は表示部に表示されないことを前提にしているが、表示させてもよい。
【0038】
図4(a)に示すように、実施の形態1に係る空港面監視システムでは、前述の二つの目標1間における距離である目標間距離と方位分解能との比較結果から得られる中間座標(中間座標及び中間座標の周辺)により行われる間引き処理部15の動作によって、2つの目標1間における中間座標近傍のビデオレベルを間引いており、2つの目標1の分離が可能となる。その結果、図4(b)に示すように、一次レーダ及び二次レーダともに航跡は2つ出力され、それぞれの航跡の相関・統合処理を行うことで最終的に出力される統合航跡の位置精度が向上する。なお、2つの目標1が距離方向(一次レーダのビーム方向)に近接した場合は、方位分解能に代えて、距離分解能を用いて、同様の処理を行えばよい。
【0039】
このように、実施の形態1に係る空港面監視システムは、一次レーダと二次レーダそれぞれを用いて目標を検出および追尾し、それぞれの航跡を相関・統合する。近接した2つの目標1を一次レーダより検出する場合、二次レーダの検出結果を用いて、一次レーダのディジタルビデオから二目標間のビデオレベルの一部を間引くにより、目標検出部7に入力されるディジタルビデオ信号(ディジタルビデオ処理信号)において、中間座標及び中間座標の周辺に相当する部分のビデオレベルがスレッショルドレベルを超えることはないので、一次レーダの目標検出確度を向上することができ、精度の高い統合航跡を生成することが可能となる。
【0040】
次に、この発明の実施の形態1に係る距離比較部14が得る分解能について図6及び7を用いて説明する。図6及び7において、16は位置検出部10が検出した目標1の位置から、一次レーダ空中線部2から二次レーダが検出した二つの目標位置までの距離と一次レーダのビーム幅との積から方位分解能を算出、又は、一次レーダのパルス幅と光速との積から距離分解能を算出するの分解能算出部、17は予め一次レーダの走査領域における方位分解能又は距離分解能、若しくは、方位分解能及び距離分解能の両方が保存された分解能データベース部である。図1に係る空港面監視システムは、分解能を外部から得ていたが、図6及び7に係る空港面監視システムは、空港面監視システム内に距離比較部14に分解能の情報を供給する構成を有する場合について説明する。基本的な動作は、図1に係る空港面監視システムと同じであるので、異なる部分を中心に説明を行う。
【0041】
図6に係る空港面監視システムにおいて、分解能算出部16は位置検出部10が検出した複数の目標1の測位信号を受けて、複数の目標1のうち、一次レーダ空中線部2から見て異なる方位かつ同じ距離の二つの目標までの距離と一次レーダ空中線部2のビーム幅の積から方位分解能を算出、若しくは、複数の目標1のうち、一次レーダ空中線部2から見て同じ方位の目標に対応し、一次レーダ空中線部2から送信される送信波のパルス幅と光速との積から得られる距離分解能を算出する。この分解能算出部16で算出された分解能は、距離比較部14に送られる。分解能の供給後の距離比較部14での処理は前述の通りである。
【0042】
図7に係る空港面監視システムにおいて、分解能データベース部17は予め一次レーダ空中線部2の走査領域における方位分解能又は距離分解能、若しくは、その両方が保存されるのである。分解能データベース部17の距離比較部14への分解能の供給は、距離比較部14からの指示で行う場合は、距離比較部14経由で位置検出部10が検出する目標1の測位信号から、対応する分解能を距離比較部14へ供給してもよいし、図示は省略するが、分解能算出部16と同じように、位置検出部10から目標1の測位信号を得て、対応する分解能を選び、そして、距離比較部14へ供給してもよい。分解能の供給後の距離比較部14での処理は前述の通りである。
【0043】
次に、分解能データベース部17を更に詳しく説明する。分解能データベース部17は、入力された測位信号と一次レーダ空中線部2との距離を算出し、地点での方位分解能及び距離分解能を分解能データベース部17内のデータベースから読み出し、測位信号に対応した分解能の情報(分解能データ)を距離比較部14へ出力する。分解能データベース部17には、例えば、一次レーダからの距離10m毎に分解能データを格納しておく。このように、方位方向に近接した2つの目標1をだけでなく、距離方向に近接した2つの目標1を分離して検出することが可能であると同時に、計算量は減少している。その結果、一次レーダの目標検出確度をさらに向上することができ、さらに精度の高い統合航跡を生成することが可能となる。
【0044】
なお、後述の実施の形態2以降では、分解能算出部16により距離比較部14へ分解能を供給する場合を例に説明を行うが、この実施の形態1のように、外部から供給してもよいし、分解能データベース部17を用いて供給してもよい。
【0045】
実施の形態2.
この発明の実施の形態2について図8及び9を用いて説明する。図9(a)は二つの目標(航空機)が方位方向に近接した場合に擬似的に分解能を上げた一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図、図9(b)は目標のエコーと統合航跡を示す図ある。なお、実施の形態1と共通の部分の説明は省略し、異なる部分を中心に説明する。実施の形態1では、一次レーダの分解能を擬似的に上げるための処理を間引き処理部15が担っていたが、この実施の形態2では、間引き処理部15の間引き方の変形例を説明する。もちろん、この変形例は、間引き処理の一例としても解釈できることはいうまでもない。図8及び9において、18は距離比較部14が目標1間距離と一次レーダの分解能とを比較した結果、目標間距離よりも一次レーダの分解能が大きいときは、A/D変換部6にA/D変換されたディジタルビデオ信号から目標1間距離の中間座標及び中間座標の周辺に相当する部分のビデオレベルを目標検出部7における目標1検出用のスレッショルドレベルよりも下げるビデオ処理部である。図中、同一符号は、同一又は相当部分を示しそれらについての詳細な説明は省略する。
【0046】
ビデオ処理部18は、中間座標情報が入力された場合、一次レーダ空中線部2から出力される方位信号であるACP(Azimuth Change Pulse、図示なし)と一次レーダ空中線部2から出力される方位信号であり、メインビームが磁北を向いた時出力されるものであるARP(Azimuth Reference Pulse、図示なし)を用いて、ディジタルビデオ信号から中間座標情報の最近傍スイープのディジタルビデオ信号を選択する。さらに、選択したディジタルビデオ信号から、中間座標情報に対応した地点を中心として、予め設定した任意の領域分(中間座標及び中間座標の周辺)ののビデオレベルを下げたディジタルビデオ処理信号を目標検出部7へ出力する。ここで、図5は一次レーダ空中線部2から送信された送信信号を近接した二つの航空機(二つの目標1)上を走査する様子を示した模式図である。一次レーダ空中線部2からスイープ毎のパルス送信方向(角度)を模式的に線で示している。なお、中間座標最近傍スイープ(スイープ4)は他のスイープよりも太い線で示している。簡便のため、90°を10スイープで表現しているが、実際には、より多くのスイープ(空間にパルスを送信して、次のパルスを送信するまでの時間、若しくは、次のパルスを送信するまでに受信されたビデオ及びデータ)となる。以下の処理は、実施の形態1に係る空港面監視システムと同じであるので、省略する。
【0047】
したがって、二次レーダが検出した二つの目標位置の目標間距離が、二次レーダが検出した二つの目標位置における一次レーダの分解能よりも小さいときに、目標間距離の中間座標及び中間座標の周辺に相当する一次レーダによる目標のエコーのビデオレベルを下げて、一次レーダによる目標位置を検出して目標の航跡を得る処理から構成される方法により、近接する二つの目標1間の距離が一次レーダの分解能よりも低い場合でも、一次レーダが追尾している複数の目標の情報と二次レーダが追尾している目標の情報精度とを統合しても、追尾の精度低下を抑制できる。
【0048】
ここで、図9を用いて、従来の空港面監視システムと実施の形態2に係る空港面監視システムの動作を説明する。図3(a)に示すように、2つの目標1が方位方向に近接すると、一次レーダの方位分解能の許容値を超えてしまい、2つの目標1間のビデオレベルがスレッショルドレベルを超え、2つの目標1の分離が不可となる。その結果、図3(b)に示すように、一次レーダ航跡は1つしか出力されないが、二次レーダでは受信時刻差を利用して測位することから、航跡は正常に2つ出力される。二次レーダ航跡の一方は前回の航跡と相関処理を行うが、もう一方は一次レーダ航跡との相関・統合処理を行うことになり、最終的に出力される統合航跡の位置精度が低下することになる。
【0049】
一方、図9は実施の形態2に係る空港面監視システムを使用する場合の動作を説明するためのものであり、図9(a)は図3(a)と同様に、2つの目標1(航空機)が方位方向に近接した場合の、一次レーダにおける、目標のエコーのビデオレベル(ディジタルビデオ処理信号)を示している。例えば、図2に記載の一次レーダ空中線部2のビームと直角方向(ビーム方向と直角方向、共に一点鎖線で図示)に並んだ二つの目標1のような状態である。簡便のため、横軸を方位方向に設定しているが、実際に得られるビデオレベルは距離方向である。図9(b)は目標のエコーと統合航跡がどのように表示されるかを示している。ただし、一次レーダ航跡および二次レーダ航跡および中間座標は表示部に表示されないことを前提にしているが、表示させてもよい。
【0050】
図9(a)に示すように、実施の形態2に係る空港面監視システムでは、前述の二つの目標1間における距離である目標間距離と方位分解能との比較結果から得られる中間座標(中間座標及び中間座標の周辺)により行われるビデオ処理部18の動作によって、2つの目標1間における中間座標近傍のビデオレベルをスレッショルドレベルよりも下げており、2つの目標1の分離が可能となる。その結果、図9(b)に示すように、一次レーダ及び二次レーダともに航跡は2つ出力され、それぞれの航跡の相関・統合処理を行うことで最終的に出力される統合航跡の位置精度が向上する。なお、2つの目標1が距離方向(一次レーダのビーム方向)に近接した場合は、方位分解能に代えて、距離分解能を用いて、同様の処理を行えばよい。
【0051】
このように、実施の形態2に係る空港面監視システムは、一次レーダと二次レーダそれぞれを用いて目標を検出および追尾し、それぞれの航跡を相関・統合する。近接した2つの目標1を一次レーダより検出する場合、二次レーダの検出結果を用いて、一次レーダのディジタルビデオから二目標間のビデオレベルを一部下げることにより、目標検出部7に入力されるディジタルビデオ信号(ディジタルビデオ処理信号)において、中間座標及び中間座標の周辺に相当する部分のビデオレベルがスレッショルドレベルを超えることはないので、一次レーダの目標検出確度を向上することができ、精度の高い統合航跡を生成することが可能となる。
【0052】
実施の形態3.
この発明の実施の形態3について図10〜12を用いて説明する。図11(a)(c)は二つの目標(航空機)が方位方向に近接した場合に擬似的に分解能を上げた一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図(中間座標最近傍から一つ外側のスイープである。図5においては、スイープ3又はスイープ5に相当する。)、図11(b)は二つの目標(航空機)が方位方向に近接した場合に擬似的に分解能を上げた一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図(中間座標最近傍のスイープである。図5においては、スイープ4に相当する。)、図11(d)は目標のエコーと統合航跡を示す図、図12(a)(c)は二つの目標(航空機)が方位方向に近接した場合に擬似的に分解能を上げた一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図(中間座標最近傍から一つ外側のスイープである。図5においては、スイープ3又はスイープ5に相当する。)、図12(b)は二つの目標(航空機)が方位方向に近接した場合に擬似的に分解能を上げた一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図(中間座標最近傍のスイープ)、図12(d)は目標のエコーと統合航跡を示す図である。
【0053】
図10〜12において、19は航跡統合部12が統合した目標1の航跡を表示し、目標1が複数であっても表示を行い、ディジタルビデオ処理も表示する表示部である。前述の実施の形態1及び2では、中間座標を用いてビデオレベルを間引く、又は、スレッショルドレベルよりも下げ、ディジタルビデオ処理信号を目標検出部のみに出力していたが、実施の形態3に係る空港面監視システムによるビデオ処理部18はディジタルビデオ処理信号を表示部19にも出力している。それ以外の構成ついては、実施の形態1及び2で説明したものと同様であるので、ここでは説明を省略する。
【0054】
ビデオ処理部18は、中間座標情報が入力された場合、一次レーダ空中線部2から出力されるACPとARPを用いて、ディジタルビデオ信号から中間座標情報の最近傍スイープのディジタルビデオ信号を選択する。さらに、選択したディジタルビデオ信号から、中間座標情報に対応した地点を中心とし、予め設定した任意の領域分のビデオレベルを下げ、ディジタルビデオ処理信号を目標検出部7および表示部19へ出力する。表示部19は統合航跡およびディジタルビデオ処理信号を表示する。
【0055】
ここで、図11を用いて実施の形態3に係る空港面監視システムの動作について説明する。図11(a)〜(c)は2つの目標1が方位方向に近接した場合の、一次レーダにおいて、実際に得られる目標のエコーのビデオレベル(ディジタルビデオ処理信号)を示しており、図11(b)が中間座標最近傍のスイープ、図11(a)(c)が中間座標最近傍から一つ外側のスイープを示している。図11(d)は目標1のエコーと統合航跡がどのように表示されるかを示している。ただし、一次レーダ航跡および二次レーダ航跡および中間座標は表示部に表示されないことを前提にしているが、表示させてもよい。
【0056】
図11(b)に示すように、実施の形態3では二目標の中間座標の最近傍スイープにおける中間座標地点から任意の領域のビデオレベルを下げており、2つの目標1の分離が可能となる。破線で示したものは、ビデオレベルを下げる前の状態である。また、図11(d)に示すように、表示部19に表示される目標のエコーの分離も可能となる。このように、実施の形態3に係る空港面監視システムは、近接した2つの目標1を分離して検出および表示することが可能である。その結果、一次レーダの目標検出確度を向上することができ、精度の高い統合航跡を生成することが可能となり、また、表示部における近接した二目標の視認性を向上することが可能となる。
【0057】
続いて、図12を用いて実施の形態3に係る空港面監視システムの動作について説明する。ビデオ処理部18は中間座標最近傍のスイープのみビデオレベルを下げていたが、実施の形態3では最近傍スイープのさらに外側のスイープのビデオレベルを下げている。それ以外の構成品については、実施の形態1及び2で説明したものと同様であるので、ここでは説明を省略する。
【0058】
ビデオ処理部18は、中間座標情報が入力された場合、一次レーダ空中線部2から出力されるACPとARPを用いて、ディジタルビデオ信号から中間座標情報の最近傍スイープのディジタルビデオ信号を選択する。さらに、選択したディジタルビデオ信号から、中間座標情報に対応した地点を中心とし、予め設定した任意の領域分のビデオレベルを下げる。ここで、最近傍スイープから外側のスイープのディジタルビデオ信号を、予め設定した任意の数n分選択する。なお、nは整数。次に、最近傍スイープの1つ外側のディジタルビデオ信号においては、中間座標情報に対応した地点を中心とし、予め設定した任意の領域はビデオレベルをそのままとし、中心から離れた地点のビデオレベルを下げる。すなわち、中間座標近傍のみビデオレベルはそのままとなる。
【0059】
同じように、最近傍スイープの2つ外側のディジタルビデオ信号においては、中間座標近傍のビデオレベルはそのままとするが、その領域は、1つ外側のディジタルビデオ信号において、ビデオレベルをそのままとした領域より大きいものとする。最近傍スイープのn個外側のディジタルビデオ信号まで、前述の条件でビデオレベルを下げ、ディジタルビデオ処理信号103を目標検出部7および表示部19へ出力する。
【0060】
ここで、図12を用いて本実施の形態に係る空港面監視システムの動作について説明する。図12(a)〜(c)は2つの目標1(航空機)が方位方向に近接した場合の、一次レーダにおいて、実際に得られる目標のエコーのビデオレベル(ディジタルビデオ処理信号)を示しており、(b)が中間座標最近傍のスイープ、(a)および(c)が中間座標最近傍から一つ外側のスイープを示している。つまり、選択するスイープ数nが1の場合である。図12(d)は目標のエコーと統合航跡がどのように表示されるかを示している。ただし、一次レーダ航跡および二次レーダ航跡および中間座標は表示部に表示されないことを前提にしているが、表示させてもよい。
【0061】
図12(a)、(c)に示すように、実施の形態3では二目標の中間座標の最近傍スイープにおける一つ外側のスイープのビデオレベルを下げており、その領域は中間座標地点から任意の領域分離れた領域となっている。選択スイープ数nが2以上のときは、二つ外側のスイープのビデオレベルを下げることになるが、その領域は一つ外側のスイープよりも小さい領域となる。つまり、中間座標近傍のビデオレベルをそのままにする領域が大きくなる。また、図12(b)で、ビデオレベルを下げていることから、目標1の分離は可能である。このとき、図12(d)に示すように、表示部において目標のエコーは分離して表示されるだけでなく、それぞれの形状もより図2に示す目標1のような航空機に近いものとなっている。
【0062】
このように、実施の形態3に係る空港面監視システムは、近接した2つの目標1を分離して検出および表示することが可能であり、また、最近傍スイープにおける一つ外側のスイープのビデオレベルを下げており、その領域は中間座標地点から任意の領域分離れた領域となっているので、表示する形状をより航空機に近づけている。その結果、一次レーダの目標検出確度を向上することができ、精度の高い統合航跡を生成することが可能となり、また、表示部19における近接した二目標の視認性をさらに向上することが可能となる。
【0063】
実施の形態4.
この発明の実施の形態4について図13及び14を用いて説明する。図14(a)は二つの目標(航空機)が方位方向に近接した場合に擬似的に分解能を上げた一次レーダにおける目標のエコーのビデオレベル(ディジタルビデオ信号)を示す図、図14(b)は目標のエコーと統合航跡を示す図ある。なお、実施の形態1〜3と共通の部分の説明は省略し、異なる部分を中心に説明する。実施の形態1〜3では、一次レーダの分解能を擬似的に上げるための処理を間引き処理部15やビデオ処理部18が担っていたが、この実施の形態4では、ビデオ処理部18と同様に間引き処理部15の間引き方の変形例を説明する。もちろん、この変形例は、間引き処理の一例としても解釈できることはいうまでもない。図13及び14において、20は距離比較部14が目標間距離と一次レーダの分解能とを比較した結果、目標間距離よりも一次レーダの分解能が大きいときは、A/D変換部6にA/D変換されたディジタルビデオ信号から目標間距離の中間座標及び中間座標の周辺に相当する部分に対する目標検出用の閾値を上げる閾値作成部である。図中、同一符号は、同一又は相当部分を示しそれらについての詳細な説明は省略する。
【0064】
前述の実施の形態1〜3では、実施の形態4においては間引き処理部15及びビデオ処理部18に代えて、閾値作成部20を備え、閾値作成部20は中間座標を用いて中間座標近傍の閾値を上げる。それ以外の構成品ついては、実施の形態1〜3で説明したものと同様であるので、ここでは説明を省略する。閾値作成部20は、中間座標情報が入力された場合、一次レーダ空中線部2から出力されるACPとARPを用いて、ディジタルビデオ信号から中間座標情報の最近傍スイープのディジタルビデオ信号を選択する。さらに、選択したディジタルビデオ信号の、中間座標情報に対応した地点を中心として、予め設定した任意の領域分の閾値を上げ、閾値情報を目標検出部7へ出力する。なお、閾値を上げる程度は、通常の目標検出用の閾値では検出と判断されるディジタルビデオ信号が検出されない水準以上のものである。目標検出部7は入力された閾値情報を用いて、目標を検出する。閾値情報は、目標検出部7がもともと設定されていたスレッショルドレベルを変更(修正)するものでもあるとも解釈できるので、閾値作成部は、閾値変更(修正)部ともいえる。
【0065】
以上、説明を行った実施の形態1〜4に係る空港面監視方法及び空港面監視システムは、各実施の形態において、相互に構成要素を置換しても実施可能であることはいうまでもない。
【符号の説明】
【0066】
1・・目標、2・・一次レーダ空中線部、3・・送信局、4・・二次レーダ空中線部、5・・一次レーダ送受信部、6・・A/D変換部、7・・目標検出部、8・・一次レーダ目標追尾部、9・・二次レーダ受信部、10・・位置検出部、11・・二次レーダ目標追尾部、12・・航跡統合部、13・・表示部、14・・距離比較部、15・・間引き処理部、16・・分解能算出部、17・・分解能データベース部、18・・ビデオ処理部、19・・表示部、20・・閾値作成部。
【特許請求の範囲】
【請求項1】
空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーを間引き、前記一次レーダによる目標位置を検出して目標の航跡を得ること特徴とする空港面監視方法。
【請求項2】
空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーのビデオレベルを下げて、前記一次レーダによる目標位置を検出して目標の航跡を得ること特徴とする空港面監視方法。
【請求項3】
空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーに対する目標検出用の閾値を上げて、前記一次レーダによる目標位置を検出して目標の航跡を得ること特徴とする空港面監視方法。
【請求項4】
前記二次レーダは、少なくとも三ヶ所の受信局により返信波を受信する請求項1〜3のいずれかに記載の空港面監視方法。
【請求項5】
前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能は、前記一次レーダの空中線部から前記二次レーダが検出した二つの目標位置までの距離と前記一次レーダのビーム幅との積から算出された方位分解能、又は、前記一次レーダのパルス幅と光速との積から算出された距離分解能である請求項1〜4のいずれかに記載の空港面監視方法。
【請求項6】
前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能は、予め前記一次レーダの空中線部から距離ごとに前記一次レーダのビーム幅から算出された方位分解能、又は、前記一次レーダのパルス幅と光速との積から算出された距離分解能から、前記一次レーダの空中線部から前記二次レーダが検出した二つの目標位置に対応するものを選択するものである請求項1〜4のいずれかに記載の空港面監視方法。
【請求項7】
空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視システムにおいて、目標に送信波を送信し、目標からの反射波を受信する一次レーダ空中線部と、この一次レーダ空中線部により受信された反射波を受信処理する一次レーダ送受信部と、この一次レーダ送受信部が受信処理したビデオ信号をA/D変換するA/D変換部と、このA/D変換部にA/D変換されたディジタルビデオ信号から目標を検出する目標検出部と、この目標検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する一次レーダ目標追尾部と、目標に搭載されたトランスポンダへ質問波を送信する送信局と、前記トランスポンダからの返信波を受信する少なくとも三ヶ所に設置される複数の二次レーダ空中線部と、この複数の二次レーダ空中線部が受信した前記トランスポンダからの返信波を受信処理する二次レーダ受信部と、この二次レーダ受信部が受信処理した前記返信波から前記トランスポンダを搭載した目標の位置を検出する位置検出部と、この位置検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する二次レーダ目標追尾部と、前記位置検出部により検出された二つの目標の目標間距離を算出し、この目標間距離と前記目標間距離に対応する前記一次レーダの分解能とを比較する距離比較部と、この距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引き、間引き後のディジタルビデオ信号を前記目標検出部に送る間引き処理部と、前記一次レーダ目標追尾部から得られた目標の航跡と前記二次レーダ目標追尾部から得られた目標の航跡とを統合する航跡統合部とを備えた空港面監視システム。
【請求項8】
空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視システムにおいて、目標に送信波を送信し、目標からの反射波を受信する一次レーダ空中線部と、この一次レーダ空中線部により受信された反射波を受信処理する一次レーダ送受信部と、この一次レーダ送受信部が受信処理したビデオ信号をA/D変換するA/D変換部と、このA/D変換部にA/D変換されたディジタルビデオ信号から目標を検出する目標検出部と、この目標検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する一次レーダ目標追尾部と、目標に搭載されたトランスポンダへ質問波を送信する送信局と、前記トランスポンダからの返信波を受信する少なくとも三ヶ所に設置される複数の二次レーダ空中線部と、この複数の二次レーダ空中線部が受信した前記トランスポンダからの返信波を受信処理する二次レーダ受信部と、この二次レーダ受信部が受信処理した前記返信波から前記トランスポンダを搭載した目標の位置を検出する位置検出部と、この位置検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する二次レーダ目標追尾部と、前記一次レーダ空中線部から前記位置検出部が検出した二つの目標位置までの距離と前記一次レーダのビーム幅との積、又は、前記一次レーダのパルス幅と光速との積から前記位置検出部により検出された二つの目標における前記一次レーダの分解能を算出する分解能算出部と、前記位置検出部により検出された二つの目標の目標間距離を算出し、この目標間距離と前記目標間距離に対応する前記一次レーダの前記分解能算出部が算出した分解能とを比較する距離比較部と、この距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引き、間引き後のディジタルビデオ信号を前記目標検出部に送る間引き処理部と、前記一次レーダ目標追尾部から得られた目標の航跡と前記二次レーダ目標追尾部から得られた目標の航跡とを統合する航跡統合部とを備えた空港面監視システム。
【請求項9】
空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視システムにおいて、目標に送信波を送信し、目標からの反射波を受信する一次レーダ空中線部と、この一次レーダ空中線部により受信された反射波を受信処理する一次レーダ送受信部と、この一次レーダ送受信部が受信処理したビデオ信号をA/D変換するA/D変換部と、このA/D変換部にA/D変換されたディジタルビデオ信号から目標を検出する目標検出部と、この目標検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する一次レーダ目標追尾部と、目標に搭載されたトランスポンダへ質問波を送信する送信局と、前記トランスポンダからの返信波を受信する少なくとも三ヶ所に設置される複数の二次レーダ空中線部と、この複数の二次レーダ空中線部が受信した前記トランスポンダからの返信波を受信処理する二次レーダ受信部と、この二次レーダ受信部が受信処理した前記返信波から前記トランスポンダを搭載した目標の位置を検出する位置検出部と、この位置検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する二次レーダ目標追尾部と、予め前記一次レーダが走査領域における分解能を保存する分解能データベース部と、前記位置検出部により検出された二つの目標の目標間距離を算出し、この目標間距離と前記目標間距離に対応し、前記分解能データベース部に保存された前記一次レーダの分解能と比較する距離比較部と、この距離比較部が前記目標間距離と前記目標間距離に対応し、前記分解能データベース部に保存された前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引き、間引き後のディジタルビデオ信号を前記目標検出部に送る間引き処理部と、前記一次レーダ目標追尾部から得られた目標の航跡と前記二次レーダ目標追尾部から得られた目標の航跡とを統合する航跡統合部とを備えた空港面監視システム。
【請求項10】
前記間引き処理部は、前記距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分のビデオレベルを下げて、前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引く請求項7〜9のいずれかに記載の空港面監視システム。
【請求項11】
前記間引き処理部は、前記距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分に対する目標検出用の閾値を上げて、前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引く請求項7〜9のいずれかに記載の空港面監視システム。
【請求項12】
請求項7〜11のいずれかに記載の空港面監視システムは、前記航跡統合部が統合した目標の航跡を表示する表示部を有する空港面監視システム。
【請求項1】
空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーを間引き、前記一次レーダによる目標位置を検出して目標の航跡を得ること特徴とする空港面監視方法。
【請求項2】
空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーのビデオレベルを下げて、前記一次レーダによる目標位置を検出して目標の航跡を得ること特徴とする空港面監視方法。
【請求項3】
空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーに対する目標検出用の閾値を上げて、前記一次レーダによる目標位置を検出して目標の航跡を得ること特徴とする空港面監視方法。
【請求項4】
前記二次レーダは、少なくとも三ヶ所の受信局により返信波を受信する請求項1〜3のいずれかに記載の空港面監視方法。
【請求項5】
前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能は、前記一次レーダの空中線部から前記二次レーダが検出した二つの目標位置までの距離と前記一次レーダのビーム幅との積から算出された方位分解能、又は、前記一次レーダのパルス幅と光速との積から算出された距離分解能である請求項1〜4のいずれかに記載の空港面監視方法。
【請求項6】
前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能は、予め前記一次レーダの空中線部から距離ごとに前記一次レーダのビーム幅から算出された方位分解能、又は、前記一次レーダのパルス幅と光速との積から算出された距離分解能から、前記一次レーダの空中線部から前記二次レーダが検出した二つの目標位置に対応するものを選択するものである請求項1〜4のいずれかに記載の空港面監視方法。
【請求項7】
空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視システムにおいて、目標に送信波を送信し、目標からの反射波を受信する一次レーダ空中線部と、この一次レーダ空中線部により受信された反射波を受信処理する一次レーダ送受信部と、この一次レーダ送受信部が受信処理したビデオ信号をA/D変換するA/D変換部と、このA/D変換部にA/D変換されたディジタルビデオ信号から目標を検出する目標検出部と、この目標検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する一次レーダ目標追尾部と、目標に搭載されたトランスポンダへ質問波を送信する送信局と、前記トランスポンダからの返信波を受信する少なくとも三ヶ所に設置される複数の二次レーダ空中線部と、この複数の二次レーダ空中線部が受信した前記トランスポンダからの返信波を受信処理する二次レーダ受信部と、この二次レーダ受信部が受信処理した前記返信波から前記トランスポンダを搭載した目標の位置を検出する位置検出部と、この位置検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する二次レーダ目標追尾部と、前記位置検出部により検出された二つの目標の目標間距離を算出し、この目標間距離と前記目標間距離に対応する前記一次レーダの分解能とを比較する距離比較部と、この距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引き、間引き後のディジタルビデオ信号を前記目標検出部に送る間引き処理部と、前記一次レーダ目標追尾部から得られた目標の航跡と前記二次レーダ目標追尾部から得られた目標の航跡とを統合する航跡統合部とを備えた空港面監視システム。
【請求項8】
空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視システムにおいて、目標に送信波を送信し、目標からの反射波を受信する一次レーダ空中線部と、この一次レーダ空中線部により受信された反射波を受信処理する一次レーダ送受信部と、この一次レーダ送受信部が受信処理したビデオ信号をA/D変換するA/D変換部と、このA/D変換部にA/D変換されたディジタルビデオ信号から目標を検出する目標検出部と、この目標検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する一次レーダ目標追尾部と、目標に搭載されたトランスポンダへ質問波を送信する送信局と、前記トランスポンダからの返信波を受信する少なくとも三ヶ所に設置される複数の二次レーダ空中線部と、この複数の二次レーダ空中線部が受信した前記トランスポンダからの返信波を受信処理する二次レーダ受信部と、この二次レーダ受信部が受信処理した前記返信波から前記トランスポンダを搭載した目標の位置を検出する位置検出部と、この位置検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する二次レーダ目標追尾部と、前記一次レーダ空中線部から前記位置検出部が検出した二つの目標位置までの距離と前記一次レーダのビーム幅との積、又は、前記一次レーダのパルス幅と光速との積から前記位置検出部により検出された二つの目標における前記一次レーダの分解能を算出する分解能算出部と、前記位置検出部により検出された二つの目標の目標間距離を算出し、この目標間距離と前記目標間距離に対応する前記一次レーダの前記分解能算出部が算出した分解能とを比較する距離比較部と、この距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引き、間引き後のディジタルビデオ信号を前記目標検出部に送る間引き処理部と、前記一次レーダ目標追尾部から得られた目標の航跡と前記二次レーダ目標追尾部から得られた目標の航跡とを統合する航跡統合部とを備えた空港面監視システム。
【請求項9】
空港面上の複数の目標を追尾して目標の航跡を検出するものであって、一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視システムにおいて、目標に送信波を送信し、目標からの反射波を受信する一次レーダ空中線部と、この一次レーダ空中線部により受信された反射波を受信処理する一次レーダ送受信部と、この一次レーダ送受信部が受信処理したビデオ信号をA/D変換するA/D変換部と、このA/D変換部にA/D変換されたディジタルビデオ信号から目標を検出する目標検出部と、この目標検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する一次レーダ目標追尾部と、目標に搭載されたトランスポンダへ質問波を送信する送信局と、前記トランスポンダからの返信波を受信する少なくとも三ヶ所に設置される複数の二次レーダ空中線部と、この複数の二次レーダ空中線部が受信した前記トランスポンダからの返信波を受信処理する二次レーダ受信部と、この二次レーダ受信部が受信処理した前記返信波から前記トランスポンダを搭載した目標の位置を検出する位置検出部と、この位置検出部により順次検出される目標の位置の経時変化から目標の航跡を追尾する二次レーダ目標追尾部と、予め前記一次レーダが走査領域における分解能を保存する分解能データベース部と、前記位置検出部により検出された二つの目標の目標間距離を算出し、この目標間距離と前記目標間距離に対応し、前記分解能データベース部に保存された前記一次レーダの分解能と比較する距離比較部と、この距離比較部が前記目標間距離と前記目標間距離に対応し、前記分解能データベース部に保存された前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引き、間引き後のディジタルビデオ信号を前記目標検出部に送る間引き処理部と、前記一次レーダ目標追尾部から得られた目標の航跡と前記二次レーダ目標追尾部から得られた目標の航跡とを統合する航跡統合部とを備えた空港面監視システム。
【請求項10】
前記間引き処理部は、前記距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分のビデオレベルを下げて、前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引く請求項7〜9のいずれかに記載の空港面監視システム。
【請求項11】
前記間引き処理部は、前記距離比較部が前記目標間距離と前記一次レーダの分解能とを比較した結果、前記目標間距離よりも前記一次レーダの分解能が大きいときは、前記A/D変換部にA/D変換されたディジタルビデオ信号から前記目標間距離の中間座標及び中間座標の周辺に相当する部分に対する目標検出用の閾値を上げて、前記目標間距離の中間座標及び中間座標の周辺に相当する部分を間引く請求項7〜9のいずれかに記載の空港面監視システム。
【請求項12】
請求項7〜11のいずれかに記載の空港面監視システムは、前記航跡統合部が統合した目標の航跡を表示する表示部を有する空港面監視システム。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2011−164056(P2011−164056A)
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願番号】特願2010−30131(P2010−30131)
【出願日】平成22年2月15日(2010.2.15)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願日】平成22年2月15日(2010.2.15)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]