
空燃比制御装置
【課題】触媒からの酸素放出量の推算精度を向上させ、触媒による排気ガス浄化能率を高く保ち、HC、CO及びNOxの排出量の一層の低減を図る。
【解決手段】内燃機関の排気通路に装着された触媒の上流に設けられる第一の空燃比センサ11と、触媒の下流に設けられる第二の空燃比センサ12と、少なくとも第一の空燃比センサ11の出力を参照して触媒からの酸素放出量を推算しその酸素放出量を目標値にフィードバック制御する空燃比制御部13と、推算される酸素放出量の誤差を縮小するための学習パラメータを内燃機関における燃料カット発生時に学習する学習部14とを具備する空燃比制装置1を構成した。
【解決手段】内燃機関の排気通路に装着された触媒の上流に設けられる第一の空燃比センサ11と、触媒の下流に設けられる第二の空燃比センサ12と、少なくとも第一の空燃比センサ11の出力を参照して触媒からの酸素放出量を推算しその酸素放出量を目標値にフィードバック制御する空燃比制御部13と、推算される酸素放出量の誤差を縮小するための学習パラメータを内燃機関における燃料カット発生時に学習する学習部14とを具備する空燃比制装置1を構成した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、触媒による排気ガス浄化能率を高める目的で実施される空燃比の制御に関する。
【背景技術】
【0002】
一般に、自動車等の排気通路には、内燃機関から排出される排気ガス中に含まれるHC、CO及びNOxを酸化/還元して無害化する三元触媒が装着されている。HC、CO及びNOxの全てを効率よく浄化するには、空燃比をウィンドウと称する理論空燃比近傍の一定範囲に収束させる必要がある。
【0003】
そのために、触媒の上流及び下流にそれぞれ空燃比センサを配し、空燃比センサの出力を目標値に制御するフィードバック制御を行うことが通例となっている(例えば、下記特許文献1ないし4を参照)。従来からある空燃比制御方法では、触媒下流の空燃比センサの出力がリッチであるかリーンであるかを判定し、その判定結果に応じて補正量を算定する。この補正量は、触媒上流の空燃比センサの出力を参照した空燃比フィードバック制御における制御中心をリーン側あるいはリッチ側に変位させ、触媒内でのガスの空燃比をウィンドウ内に維持する役割を果たす。
【0004】
近時では、強化された排気ガス規制に対応して、触媒の酸素吸蔵能(OSC)が大きくなる傾向にある。酸素吸蔵能が大きいと、触媒の上流で空燃比が変動したとしても、触媒下流の空燃比センサの出力信号にはすぐには変化が現れない。それ故、触媒下流の空燃比センサの出力がリーンからリッチへの遷移を示したときには、既に触媒内の酸素が不足してしまっており、HC及びCOの排出量が増加することがあり得た。逆に、触媒下流の空燃比センサの出力がリッチからリーンへの遷移を示したときには、既に触媒内が酸素過多であり、今度はNOxの排出量の増加を招いていた。
【0005】
そこで、本発明の発明者は、触媒内に吸蔵した酸素量と当該触媒の酸素吸蔵能との比である酸素割合のモデルを構築し、モデル数式に則り、触媒から放出された酸素の量を推算して、その酸素放出量を目標値にフィードバック制御する空燃比制御装置を考案した(下記特許文献5を参照)。この空燃比制御装置によれば、触媒下流の空燃比センサの出力信号の変動が触媒内の空燃比の変動に対して遅延するという従前の問題を、有効に回避することができる。
【0006】
上掲の空燃比制御装置は優れて有用なものである。しかしながら、空燃比センサの個体差や経年変化による出力のばらつき、触媒自体の劣化等によるモデル化誤差に起因して、酸素放出量の推算値に誤差が混入することがあり得る。この推算値の誤差は、触媒による排気ガス浄化能率を低下させエミッションの悪化を招くことにつながる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第2790896号公報
【特許文献2】特許第2912478号公報
【特許文献3】特開2007−187119号公報
【特許文献4】特開2008−248862号公報
【特許文献5】特願2009−205204号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、触媒からの酸素放出量の推算精度を向上させ、以て触媒による排気ガス浄化能率を高く保ち、HC、CO及びNOxの排出量の一層の低減を図ることを所期の目的とする。
【課題を解決するための手段】
【0009】
本発明では、内燃機関の排気通路に装着された排気ガス浄化用の触媒の上流に設けられる第一の空燃比センサと、前記触媒の下流に設けられる第二の空燃比センサと、少なくとも前記第一の空燃比センサの出力を参照し、前記触媒内に吸蔵した酸素量と当該触媒の酸素吸蔵能との比である酸素割合のモデル数式に則り、触媒内に酸素吸蔵能まで酸素を吸蔵した状態から酸素を放出した量を推算してその放出量を目標値にフィードバック制御する空燃比制御部と、前記モデル数式に則って推算される放出量の誤差を縮小するための学習パラメータを算定し記憶する学習部とを具備してなり、前記学習部が、内燃機関における燃料カット発生時に前記学習パラメータの算定を実行し、燃料カット開始から前記第二の空燃比センサの出力がリーンになったことを示す所定値に到達するまでの経過時間と、燃料カット開始から前記モデル数式に則って推算される放出量が0となるまでの経過時間との時間差に応じて、当該時間差を減少させる方向に学習パラメータを増減させ、前記空燃比制御部が、前記学習部で記憶した学習パラメータを加味した上でフィードバック制御を実施する空燃比制御装置を構成した。
【0010】
前記モデル数式は、例えば、下式(数1)の形で表される。
【0011】
【数1】

【発明の効果】
【0012】
本発明によれば、触媒からの酸素放出量の推算精度を向上させることができ、触媒による排気ガス浄化能率を高く保ち、HC、CO及びNOxの排出量の一層の低減を図り得る。
【図面の簡単な説明】
【0013】
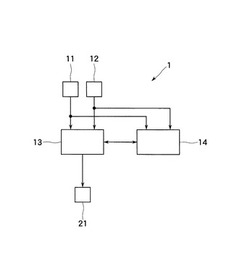
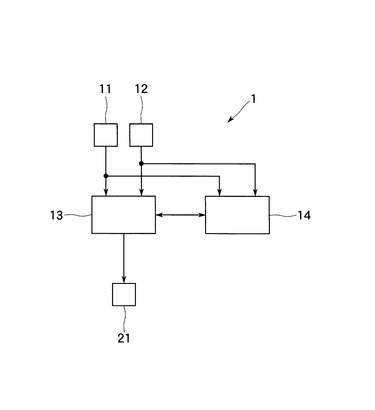
【図1】本発明の実施の形態の空燃比制御装置の構成要素を説明する図。
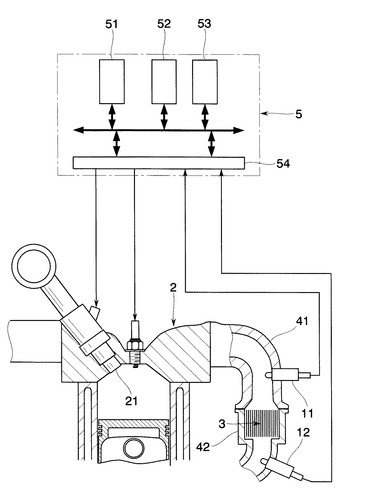
【図2】同空燃比制御装置のハードウェア資源構成を示す図。
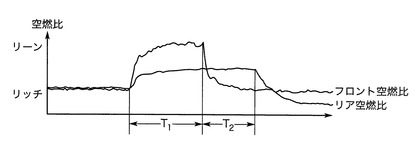
【図3】フロント空燃比信号出力とリア空燃比信号出力との関係を示す図。
【図4】酸素吸蔵時間と酸素放出時間との関係を示す図。
【図5】流入空気量と反応速度比との関係を示す図。
【図6】流入空気量と反応速度比との関係を示す図。
【図7】燃料カット終了後の酸素放出量の制御の態様を示す図。
【図8】燃料カット開始からの経過時間TA、TD、TC及びTDの例を示す図。
【図9】同空燃比制御装置が実行する処理の手順例を示すフロー図。
【発明を実施するための形態】
【0014】
本発明の一実施形態を、図面を参照して説明する。本空燃比制御装置1は、内燃機関2で燃料を燃焼させることにより発生する有害物質HC、CO、NOxを無害化する触媒3における空燃比を制御するものであって、図1に示すように、触媒3の上流側における空燃比または酸素濃度に応じた出力信号を出力する第一の空燃比センサ11と、触媒3の下流側における空燃比または酸素濃度に応じた出力信号を出力する第二の空燃比センサ12と、両センサ11、12の出力信号を参照して空燃比制御を実施する空燃比制御部13と、この空燃比制御部13が参照する学習パラメータβ(後述する)の学習を行う学習部14とを具備する。
【0015】
図2に、ハードウェア構成の概要を示す。内燃機関2は、例えば自動車用の多気筒の燃料噴射式エンジンである。内燃機関2で生成された燃焼ガスは、排気ポートから排気マニホルド41、排気管42及び触媒3を通じて大気中に排出される。空燃比センサ11、12は、排気ガスに接触して反応することにより、排気ガス中の酸素濃度に応じた電圧信号を出力する。触媒3上流にある第一の空燃比センサ11は、排気ガスの空燃比に比例した信号を出力するリニアA/Fセンサとすることが好ましい。触媒3下流にある第二の空燃比センサ12は、リニアA/Fセンサであってもよく、排気ガスの空燃比に対して非線形な出力特性を有するO2センサであってもよい。
【0016】
第一の空燃比センサ11、第二の空燃比センサ12は、吸気負圧センサ、エンジン回転数センサ、車速センサ、冷却水温センサ、カムポジションセンサ、スロットルセンサ等の各種センサ(図示せず)とともに、電子制御装置(ECU)5に電気的に接続している。電子制御装置5は、プロセッサ51、RAM52、ROM(または、フラッシュメモリ)53、I/Oインタフェース54等を包有するマイクロコンピュータシステムである。I/Oインタフェース54は、各種センサの出力信号の受信や制御信号の送信を担うもので、A/D変換回路及び/またはD/A変換回路を含む。プロセッサ51が実行するべきプログラムはROM53に格納されており、その実行の際にROM53からRAM52へ読み込まれ、プロセッサ51によって解読される。しかして、電子制御装置5は、プログラムに従い、空燃比制御部13及び学習部14としての機能を発揮する。
【0017】
空燃比制御部13たる電子制御装置5は、第一の空燃比センサ11、第二の空燃比センサ12やその他のセンサから出力される信号を、I/Oインタフェース54を介して受信する。そして、要求される燃料噴射量を算出し、この要求燃料噴射量に対応した制御信号をI/Oインタフェース54を介して燃料噴射弁21に入力、内燃機関2の燃料噴射を制御する。要求燃料噴射量は、吸気管内負圧及びエンジン回転数等を参照して基本噴射量を求め、その基本噴射量に、エンジン冷却水温等の環境条件に応じた環境補正、並びに下記フィードバック制御による補正を加えて、最終的に決定する。
【0018】
本実施形態では、空燃比の制御にあたり、第二の空燃比センサ12の出力信号を制御量(制御出力)とはしない。本実施形態では、触媒3内に酸素吸蔵能まで酸素を吸蔵した状態を基準とし、その状態から酸素を放出した量をモデル数式によって推算する。そして、推算した酸素放出量を制御量として、これを所要の目標値に到達させるフィードバック制御を実施する。
【0019】
まず、触媒3に吸蔵した酸素量は、触媒3に流入する酸素の流量の時間積分に、反応速度係数を乗じたものと考えることができる。反応速度係数は、触媒3が酸素を吸蔵する速度を示す。反応速度係数と酸素吸蔵能との比(反応速度係数/酸素吸蔵能)をモデルパラメータθ1とおけば、酸素濃度Oのモデル数式を下式(数2)の如く規定することができる。
【0020】
【数2】
【0021】
上式(数2)の酸素割合Oの値は、0≦O≦1の範囲をとる。αは空気中に含まれる酸素の割合であり、Gaは触媒3に流入する空気の流量である。αの値は、例えば0.21とする。αは、モデルパラメータθ1に組み入れてしまっても構わない。その場合、θ1=α×(反応速度係数/酸素吸蔵能)となる。流入空気量Gaは、第一の空燃比センサ11を介して検出した流入ガスの空燃比に、電子制御装置5にて算出した要求燃料噴射量を乗じて算定する。このようにすれば、Gaを計測するために高価なエアフローセンサを使用せずに済む上、Gaの値の精度も向上する。尤も、吸気管内負圧及びエンジン回転数からGaを推測することを妨げるものではない。
【0022】
λは、排気ガスの空燃比の目標空燃比からの乖離を示す空気過剰率である。空気過剰率λは、原理的には、第一の空燃比センサ11を介して検出したガスの空燃比と、最終的に実現するべき目標空燃比との比(上流側実測空燃比/目標空燃比)である。目標空燃比は、通常は理論空燃比、ガソリンエンジンにあっては約14.7であるが、リーンバーン運転している最中等、理論空燃比よりも増減することがあり得る。
【0023】
触媒3の酸素吸蔵能、酸素吸蔵速度、酸素放出速度は、おしなべて触媒3の経時劣化の影響を受ける。であるから、モデルパラメータθ1もまた、触媒3の経時劣化の影響を受ける。だが、酸素放出速度に対する酸素吸蔵速度の比である反応速度比は、触媒3の経時劣化によらず一定であると見なすことが可能である。
【0024】
以降、反応速度比に関して補記する。図3は、触媒3に流入するガスの空燃比を意図的に上下させる実験を行い、第一の空燃比センサ11の出力信号及び第二の空燃比センサ12の出力信号を観測したものである。第一の空燃比センサ11の出力は、触媒3に流入するガスの空燃比をそのまま表示していると言える。一方で、第二の空燃比センサ12の出力は、第一の空燃比センサ11の出力、ひいては触媒3に流入するガスの空燃比の変動に対して遅れている。
【0025】
触媒3に流入するガスの空燃比がリーンな期間では、触媒3に酸素が吸蔵される。触媒3に流入するガスの空燃比がリッチな期間では、触媒3に吸蔵されていた酸素が放出される。図3中、空燃比リッチだった流入ガスが空燃比リーンとなった後、再び空燃比リッチとなるまでの期間T1が、触媒3に酸素が吸蔵される期間である。そして、空燃比リーンだった流入ガスが空燃比リッチとなった後、第二の空燃比センサ12の出力信号がリーンからリッチへと反転するまでの期間T2が、触媒3から酸素が放出される期間である。第二の空燃比センサ12の出力がリーンからリッチへと反転したことは、触媒3からの酸素の放出が衰えたことを暗示している。
【0026】
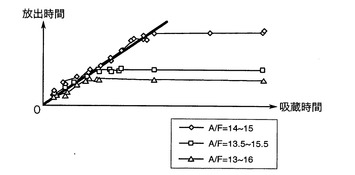
図4は、流入空気量Gaを一定として上記実験を行い、酸素吸蔵期間T1と酸素放出期間T2とをそれぞれ計測してプロットしたものである。図4では、触媒3に流入するガスの空燃比のリーン時の値とリッチ時の値との組合せを、三通りに変えて実験した結果を示している。流入ガスの空燃比の値によらず、酸素吸蔵期間T1と酸素放出期間T2との間には一定の比例関係が存在している。ここではその比例係数、即ち図4中に引いた直線の傾きを、反応速度比ということとする。反応速度比は、酸素放出速度に対する酸素吸蔵速度の比(T1/T2)を示す。
【0027】
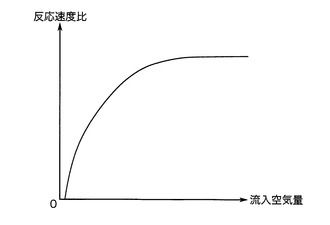
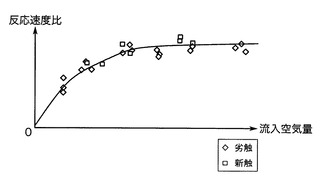
図5は、流入空気量Gaを変えて上記実験を行い、反応速度比を計測したものである。並びに、図6は、同様の実験を、新しい触媒3と古い劣化した触媒3とを用いてそれぞれ行った結果である。図6から明らかなように、反応速度比は触媒3の経時劣化によらず一定であると見なすことができる。
【0028】
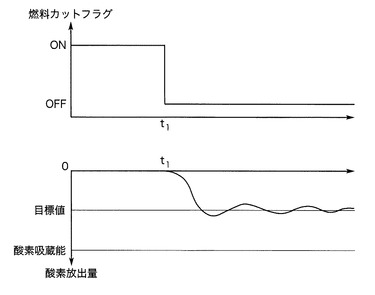
内燃機関2の気筒への燃料供給を一時中断する燃料カットを実行すると、触媒3に燃料成分を含まない空気が流入し、触媒3内に酸素が充満する。よって、燃料カットを終了して燃料供給を再開する直前の時点t1では、触媒3内に酸素吸蔵能一杯まで酸素を吸蔵している。酸素吸蔵能は触媒3の経時劣化とともに低下するため、時点t1において触媒3に吸蔵している酸素の絶対量は不明である。だが、図7に示すように、燃料供給再開後に触媒3から放出した酸素の量Oを考えれば、燃料供給再開時点t1における酸素放出量Oを常に0とすることができる。
【0029】
モデル数式(数2)を援用し、モデルパラメータθ1を酸素吸蔵速度または酸素放出速度を示すモデルパラメータθ2に置き換えると、酸素放出量Oのモデル数式として下式(数3)を得られる。
【0030】
【数3】
【0031】
酸素放出量Oは、触媒3内に酸素が充満した状態を基準(O=0)とし、燃料カットを実行する都度その値が0にリセットされる。
【0032】
モデルパラメータθ2は、触媒3が酸素を放出する(λ≦1となる)期間と、触媒3が酸素を吸蔵する(λ>1となる)期間とで相異する。しかしながら、反応速度比kは、触媒3の経時劣化によらず一定であることが分かっている。図5に示している反応速度比k(Ga)を用いれば、モデルパラメータθ2を下式(数4)のように設定することができる。
【0033】
【数4】
【0034】
上式(数4)のモデルパラメータθ2は、マップデータとしてRAM52またはROM53に記憶保持させておけばよい。
【0035】
電子制御装置5は、酸素放出量Oに適宜に目標値を設定し、モデル数式に則って推算した酸素放出量Oをその目標値に収束させるフィードバック制御を実施する。即ち、推算した現在の酸素放出量Oとその目標値との偏差に基づいて燃料噴射量のフィードバック補正量を算出し、要求燃料噴射量に加味する。これにより、空燃比の振動を抑圧してウィンドウ内に維持する。
【0036】
その上で、本実施形態では、触媒3からの酸素放出量Oの推算精度を向上させるべく、酸素放出量Oの推算式(数3)及び(数4)に、推算誤差を補正、縮小するための学習パラメータβを導入することとしている。
【0037】
学習部14たる電子制御装置5は、所定の燃料カット条件が成立し、内燃機関2の気筒への燃料供給(燃料噴射)を一時中断する燃料カットが発生した時に、学習パラメータβを算定、その学習を実行する。燃料カット条件は、既存の自動車用内燃機関2に準ずる。例えば、エンジン回転数が一定以上あり、かつアイドルスイッチがONになった(または、アクセルペダルの踏込量が閾値以下となった)ことを条件とする。燃料カットは、エンジン回転数が所定の復帰回転数以下まで下がったり、アイドルスイッチがOFFになったりすると終了(燃料供給を再開)する。
【0038】
学習パラメータβを導入した酸素放出量Oの推算式は、下式(数5)となる。
【0039】
【数5】
【0040】
A/Fは第一の空燃比センサ11を介して検出したガスの空燃比、A/Ftargは目標空燃比である。このように、本実施形態では、空気過剰率λの分母に学習パラメータβを加味する。
【0041】
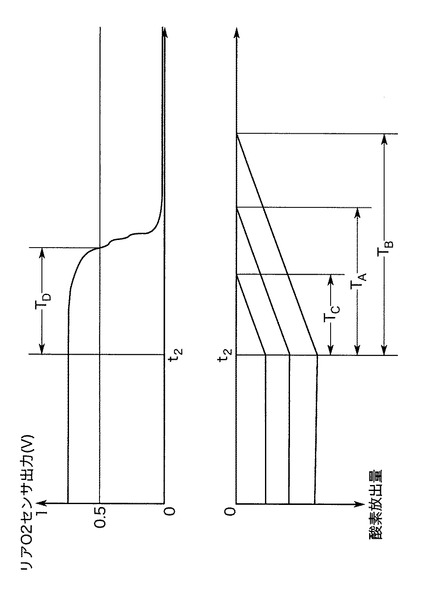
電子制御装置5は、パラメータβの学習に際し、燃料カット開始から第二の空燃比センサ12の出力がリーンになったことを示す所定値(第二の空燃比センサ12がO2センサである場合、例えば出力電圧=0.5V)に到達するまでの経過時間と、燃料カット開始からモデル数式(数5)に則って推算される放出量Oが0となるまでの経過時間とを計数し、両者の時間差に応じて、当該時間差を減少させる方向にパラメータβを増減させる。但し、後者の経過時間を計数するにあたり、モデル数式(数5)に適用する空気過剰率λとして、下記の式(数6)、式(数7)及び式(数8)の三つをそれぞれ用いる。
【0042】
【数6】
【0043】
【数7】
【0044】
【数8】
【0045】
β0は定数、ここでは0とする。eもまた定数であるが、第一の空燃比センサ11の計測する空燃比の公差に相当する値とする。第一の空燃比センサ11の公差が±0.05であるならば、その公差の絶対値をとってe=0.05とする。
【0046】
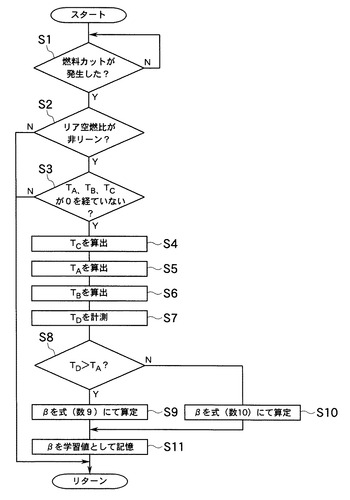
図9に、パラメータβの学習処理の手順を示す。電子制御装置5は、内燃機関2における燃料カットが発生したとき(ステップS1)、第二の空燃比センサ12の出力が非リーンを示しており(例えば、出力電圧>0.5V)、なおかつ、式(数6)、式(数7)、式(数8)に示す各空気過剰率λを適用して演算した酸素放出量O(数5)が何れも、前回の燃料カット終了から今回の燃料カット開始までの期間に一度も0になっていないことを条件として(ステップS2、S3)、パラメータβの学習を実施する。
【0047】
パラメータβの学習では、燃料カットの開始から、式(数6)の空気過剰率λを適用した酸素放出量O(数5)が0になるまでの時間TA、式(数7)の空気過剰率λを適用した酸素放出量Oが0になるまでの時間TB、並びに、式(数8)の空気過剰率λを適用した酸素放出量Oが0になるまでの時間TCをそれぞれ算出する(ステップS4ないしS6)。さらに、燃料カットの開始から、第二の空燃比センサ12の出力がリーンに切り替わる(例えば、出力電圧≦0.5V)までの時間TDを計測する(ステップS7)。図8に、燃料カット開始時点t2から計数される経過時間TA、TB、TC及びTDの例を示す。
【0048】
そして、経過時間TDと経過時間TAとの時間差を減少させるように、学習パラメータβを決定する。本実施形態では、TDとTAとの時間差を基に、補間法(内挿法)にて新たなパラメータβを算定する。即ち、TD>TAであるならば(ステップS8)βを下式(数9)とし(ステップS9)、TD<TAであるならばβを下式(数10)とする(ステップS10)。
【0049】
【数9】
【0050】
【数10】
【0051】
決定した学習パラメータβは、RAM52またはROM53に記憶保持する(ステップS11)。このβは、今回の燃料カットの終了後の空燃比制御において、次回の燃料カットが発生するまでの間、空燃比制御部13で反復演算する酸素放出量Oの推算式(数5)に適用される。
【0052】
本実施形態によれば、内燃機関2の排気通路に装着された排気ガス浄化用の触媒3の上流に設けられる第一の空燃比センサ11と、前記触媒3の下流に設けられる第二の空燃比センサ12と、少なくとも前記第一の空燃比センサの出力11を参照し、前記触媒3内に吸蔵した酸素量と当該触媒3の酸素吸蔵能との比である酸素割合のモデル数式に則り、触媒3内に酸素吸蔵能まで酸素を吸蔵した状態から酸素を放出した量Oを推算してその放出量Oを目標値にフィードバック制御する空燃比制御部13と、前記モデル数式に則って推算される放出量Oの誤差を縮小するための学習パラメータβを算定し記憶する学習部14とを具備する空燃比制御装置1において、前記学習部14が、内燃機関2における燃料カット発生時に前記学習パラメータβの算定を実行し、燃料カット開始から前記第二の空燃比センサ12の出力がリーンになったことを示す所定値(0.5V)に到達するまでの経過時間TDと、燃料カット開始から前記モデル数式に則って推算される放出量Oが0となるまでの経過時間TAとの時間差に応じて、当該時間差を減少させる方向に学習パラメータβを増減させるものとし、前記空燃比制御部13が、前記学習部14で記憶した学習パラメータβを加味した上でフィードバック制御を実施するものとしたため、酸素放出量Oの推算精度が向上し、触媒3下流にある第二の空燃比センサ12の出力信号の変動が触媒3内の空燃比の変動に対して遅延する問題を有効に回避できる。従って、触媒3の排気ガス浄化能率を高く保つことが可能となり、HC、CO及びNOxの排出量の一層の低減を図り得る上、触媒3に使用する貴金属量の削減にも資する。
【0053】
酸素放出量Oは、触媒3内に酸素が充満した状態を基準(O=0)とする値であり、これを制御量としていることで、触媒3の酸素吸蔵能の劣化の度合いに応じた目標値の設定変更が不要となっている。また、燃料カットを実行する度、酸素放出量Oの値が0にリセットされ、推算誤差もリセットされることから、高精度のフィードバック制御が実現される。しかも、燃料カットの機会は自動車の運転中しばしば訪れるので、自然にパラメータβの更新回数を増やすことができる。
【0054】
なお、本発明は以上に詳述した実施形態に限られるものではない。特に、学習パラメータβの算定式は、式(数9)及び式(数10)には限定されない。例えば、TD>TAならばβを所定量γ(例えば、γ=0.001)だけ増加させ、TD<TAならばβを所定量γだけ減少させる、というように、TDとTAとの大小関係に応じてβを増減させるようにしても構わない。
【0055】
その他各部の具体的構成は、本発明の趣旨を逸脱しない範囲で種々変形が可能である。
【産業上の利用可能性】
【0056】
本発明は、自動車等に搭載される内燃機関の制御に利用することができる。
【符号の説明】
【0057】
1…空燃比制御装置
11…第一の空燃比センサ
12…第二の空燃比センサ
13、5…空燃比制御部(電子制御装置)
14、5…学習部(電子制御装置)
2…内燃機関
3…触媒
【技術分野】
【0001】
本発明は、触媒による排気ガス浄化能率を高める目的で実施される空燃比の制御に関する。
【背景技術】
【0002】
一般に、自動車等の排気通路には、内燃機関から排出される排気ガス中に含まれるHC、CO及びNOxを酸化/還元して無害化する三元触媒が装着されている。HC、CO及びNOxの全てを効率よく浄化するには、空燃比をウィンドウと称する理論空燃比近傍の一定範囲に収束させる必要がある。
【0003】
そのために、触媒の上流及び下流にそれぞれ空燃比センサを配し、空燃比センサの出力を目標値に制御するフィードバック制御を行うことが通例となっている(例えば、下記特許文献1ないし4を参照)。従来からある空燃比制御方法では、触媒下流の空燃比センサの出力がリッチであるかリーンであるかを判定し、その判定結果に応じて補正量を算定する。この補正量は、触媒上流の空燃比センサの出力を参照した空燃比フィードバック制御における制御中心をリーン側あるいはリッチ側に変位させ、触媒内でのガスの空燃比をウィンドウ内に維持する役割を果たす。
【0004】
近時では、強化された排気ガス規制に対応して、触媒の酸素吸蔵能(OSC)が大きくなる傾向にある。酸素吸蔵能が大きいと、触媒の上流で空燃比が変動したとしても、触媒下流の空燃比センサの出力信号にはすぐには変化が現れない。それ故、触媒下流の空燃比センサの出力がリーンからリッチへの遷移を示したときには、既に触媒内の酸素が不足してしまっており、HC及びCOの排出量が増加することがあり得た。逆に、触媒下流の空燃比センサの出力がリッチからリーンへの遷移を示したときには、既に触媒内が酸素過多であり、今度はNOxの排出量の増加を招いていた。
【0005】
そこで、本発明の発明者は、触媒内に吸蔵した酸素量と当該触媒の酸素吸蔵能との比である酸素割合のモデルを構築し、モデル数式に則り、触媒から放出された酸素の量を推算して、その酸素放出量を目標値にフィードバック制御する空燃比制御装置を考案した(下記特許文献5を参照)。この空燃比制御装置によれば、触媒下流の空燃比センサの出力信号の変動が触媒内の空燃比の変動に対して遅延するという従前の問題を、有効に回避することができる。
【0006】
上掲の空燃比制御装置は優れて有用なものである。しかしながら、空燃比センサの個体差や経年変化による出力のばらつき、触媒自体の劣化等によるモデル化誤差に起因して、酸素放出量の推算値に誤差が混入することがあり得る。この推算値の誤差は、触媒による排気ガス浄化能率を低下させエミッションの悪化を招くことにつながる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第2790896号公報
【特許文献2】特許第2912478号公報
【特許文献3】特開2007−187119号公報
【特許文献4】特開2008−248862号公報
【特許文献5】特願2009−205204号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、触媒からの酸素放出量の推算精度を向上させ、以て触媒による排気ガス浄化能率を高く保ち、HC、CO及びNOxの排出量の一層の低減を図ることを所期の目的とする。
【課題を解決するための手段】
【0009】
本発明では、内燃機関の排気通路に装着された排気ガス浄化用の触媒の上流に設けられる第一の空燃比センサと、前記触媒の下流に設けられる第二の空燃比センサと、少なくとも前記第一の空燃比センサの出力を参照し、前記触媒内に吸蔵した酸素量と当該触媒の酸素吸蔵能との比である酸素割合のモデル数式に則り、触媒内に酸素吸蔵能まで酸素を吸蔵した状態から酸素を放出した量を推算してその放出量を目標値にフィードバック制御する空燃比制御部と、前記モデル数式に則って推算される放出量の誤差を縮小するための学習パラメータを算定し記憶する学習部とを具備してなり、前記学習部が、内燃機関における燃料カット発生時に前記学習パラメータの算定を実行し、燃料カット開始から前記第二の空燃比センサの出力がリーンになったことを示す所定値に到達するまでの経過時間と、燃料カット開始から前記モデル数式に則って推算される放出量が0となるまでの経過時間との時間差に応じて、当該時間差を減少させる方向に学習パラメータを増減させ、前記空燃比制御部が、前記学習部で記憶した学習パラメータを加味した上でフィードバック制御を実施する空燃比制御装置を構成した。
【0010】
前記モデル数式は、例えば、下式(数1)の形で表される。
【0011】
【数1】
【発明の効果】
【0012】
本発明によれば、触媒からの酸素放出量の推算精度を向上させることができ、触媒による排気ガス浄化能率を高く保ち、HC、CO及びNOxの排出量の一層の低減を図り得る。
【図面の簡単な説明】
【0013】
【図1】本発明の実施の形態の空燃比制御装置の構成要素を説明する図。
【図2】同空燃比制御装置のハードウェア資源構成を示す図。
【図3】フロント空燃比信号出力とリア空燃比信号出力との関係を示す図。
【図4】酸素吸蔵時間と酸素放出時間との関係を示す図。
【図5】流入空気量と反応速度比との関係を示す図。
【図6】流入空気量と反応速度比との関係を示す図。
【図7】燃料カット終了後の酸素放出量の制御の態様を示す図。
【図8】燃料カット開始からの経過時間TA、TD、TC及びTDの例を示す図。
【図9】同空燃比制御装置が実行する処理の手順例を示すフロー図。
【発明を実施するための形態】
【0014】
本発明の一実施形態を、図面を参照して説明する。本空燃比制御装置1は、内燃機関2で燃料を燃焼させることにより発生する有害物質HC、CO、NOxを無害化する触媒3における空燃比を制御するものであって、図1に示すように、触媒3の上流側における空燃比または酸素濃度に応じた出力信号を出力する第一の空燃比センサ11と、触媒3の下流側における空燃比または酸素濃度に応じた出力信号を出力する第二の空燃比センサ12と、両センサ11、12の出力信号を参照して空燃比制御を実施する空燃比制御部13と、この空燃比制御部13が参照する学習パラメータβ(後述する)の学習を行う学習部14とを具備する。
【0015】
図2に、ハードウェア構成の概要を示す。内燃機関2は、例えば自動車用の多気筒の燃料噴射式エンジンである。内燃機関2で生成された燃焼ガスは、排気ポートから排気マニホルド41、排気管42及び触媒3を通じて大気中に排出される。空燃比センサ11、12は、排気ガスに接触して反応することにより、排気ガス中の酸素濃度に応じた電圧信号を出力する。触媒3上流にある第一の空燃比センサ11は、排気ガスの空燃比に比例した信号を出力するリニアA/Fセンサとすることが好ましい。触媒3下流にある第二の空燃比センサ12は、リニアA/Fセンサであってもよく、排気ガスの空燃比に対して非線形な出力特性を有するO2センサであってもよい。
【0016】
第一の空燃比センサ11、第二の空燃比センサ12は、吸気負圧センサ、エンジン回転数センサ、車速センサ、冷却水温センサ、カムポジションセンサ、スロットルセンサ等の各種センサ(図示せず)とともに、電子制御装置(ECU)5に電気的に接続している。電子制御装置5は、プロセッサ51、RAM52、ROM(または、フラッシュメモリ)53、I/Oインタフェース54等を包有するマイクロコンピュータシステムである。I/Oインタフェース54は、各種センサの出力信号の受信や制御信号の送信を担うもので、A/D変換回路及び/またはD/A変換回路を含む。プロセッサ51が実行するべきプログラムはROM53に格納されており、その実行の際にROM53からRAM52へ読み込まれ、プロセッサ51によって解読される。しかして、電子制御装置5は、プログラムに従い、空燃比制御部13及び学習部14としての機能を発揮する。
【0017】
空燃比制御部13たる電子制御装置5は、第一の空燃比センサ11、第二の空燃比センサ12やその他のセンサから出力される信号を、I/Oインタフェース54を介して受信する。そして、要求される燃料噴射量を算出し、この要求燃料噴射量に対応した制御信号をI/Oインタフェース54を介して燃料噴射弁21に入力、内燃機関2の燃料噴射を制御する。要求燃料噴射量は、吸気管内負圧及びエンジン回転数等を参照して基本噴射量を求め、その基本噴射量に、エンジン冷却水温等の環境条件に応じた環境補正、並びに下記フィードバック制御による補正を加えて、最終的に決定する。
【0018】
本実施形態では、空燃比の制御にあたり、第二の空燃比センサ12の出力信号を制御量(制御出力)とはしない。本実施形態では、触媒3内に酸素吸蔵能まで酸素を吸蔵した状態を基準とし、その状態から酸素を放出した量をモデル数式によって推算する。そして、推算した酸素放出量を制御量として、これを所要の目標値に到達させるフィードバック制御を実施する。
【0019】
まず、触媒3に吸蔵した酸素量は、触媒3に流入する酸素の流量の時間積分に、反応速度係数を乗じたものと考えることができる。反応速度係数は、触媒3が酸素を吸蔵する速度を示す。反応速度係数と酸素吸蔵能との比(反応速度係数/酸素吸蔵能)をモデルパラメータθ1とおけば、酸素濃度Oのモデル数式を下式(数2)の如く規定することができる。
【0020】
【数2】
【0021】
上式(数2)の酸素割合Oの値は、0≦O≦1の範囲をとる。αは空気中に含まれる酸素の割合であり、Gaは触媒3に流入する空気の流量である。αの値は、例えば0.21とする。αは、モデルパラメータθ1に組み入れてしまっても構わない。その場合、θ1=α×(反応速度係数/酸素吸蔵能)となる。流入空気量Gaは、第一の空燃比センサ11を介して検出した流入ガスの空燃比に、電子制御装置5にて算出した要求燃料噴射量を乗じて算定する。このようにすれば、Gaを計測するために高価なエアフローセンサを使用せずに済む上、Gaの値の精度も向上する。尤も、吸気管内負圧及びエンジン回転数からGaを推測することを妨げるものではない。
【0022】
λは、排気ガスの空燃比の目標空燃比からの乖離を示す空気過剰率である。空気過剰率λは、原理的には、第一の空燃比センサ11を介して検出したガスの空燃比と、最終的に実現するべき目標空燃比との比(上流側実測空燃比/目標空燃比)である。目標空燃比は、通常は理論空燃比、ガソリンエンジンにあっては約14.7であるが、リーンバーン運転している最中等、理論空燃比よりも増減することがあり得る。
【0023】
触媒3の酸素吸蔵能、酸素吸蔵速度、酸素放出速度は、おしなべて触媒3の経時劣化の影響を受ける。であるから、モデルパラメータθ1もまた、触媒3の経時劣化の影響を受ける。だが、酸素放出速度に対する酸素吸蔵速度の比である反応速度比は、触媒3の経時劣化によらず一定であると見なすことが可能である。
【0024】
以降、反応速度比に関して補記する。図3は、触媒3に流入するガスの空燃比を意図的に上下させる実験を行い、第一の空燃比センサ11の出力信号及び第二の空燃比センサ12の出力信号を観測したものである。第一の空燃比センサ11の出力は、触媒3に流入するガスの空燃比をそのまま表示していると言える。一方で、第二の空燃比センサ12の出力は、第一の空燃比センサ11の出力、ひいては触媒3に流入するガスの空燃比の変動に対して遅れている。
【0025】
触媒3に流入するガスの空燃比がリーンな期間では、触媒3に酸素が吸蔵される。触媒3に流入するガスの空燃比がリッチな期間では、触媒3に吸蔵されていた酸素が放出される。図3中、空燃比リッチだった流入ガスが空燃比リーンとなった後、再び空燃比リッチとなるまでの期間T1が、触媒3に酸素が吸蔵される期間である。そして、空燃比リーンだった流入ガスが空燃比リッチとなった後、第二の空燃比センサ12の出力信号がリーンからリッチへと反転するまでの期間T2が、触媒3から酸素が放出される期間である。第二の空燃比センサ12の出力がリーンからリッチへと反転したことは、触媒3からの酸素の放出が衰えたことを暗示している。
【0026】
図4は、流入空気量Gaを一定として上記実験を行い、酸素吸蔵期間T1と酸素放出期間T2とをそれぞれ計測してプロットしたものである。図4では、触媒3に流入するガスの空燃比のリーン時の値とリッチ時の値との組合せを、三通りに変えて実験した結果を示している。流入ガスの空燃比の値によらず、酸素吸蔵期間T1と酸素放出期間T2との間には一定の比例関係が存在している。ここではその比例係数、即ち図4中に引いた直線の傾きを、反応速度比ということとする。反応速度比は、酸素放出速度に対する酸素吸蔵速度の比(T1/T2)を示す。
【0027】
図5は、流入空気量Gaを変えて上記実験を行い、反応速度比を計測したものである。並びに、図6は、同様の実験を、新しい触媒3と古い劣化した触媒3とを用いてそれぞれ行った結果である。図6から明らかなように、反応速度比は触媒3の経時劣化によらず一定であると見なすことができる。
【0028】
内燃機関2の気筒への燃料供給を一時中断する燃料カットを実行すると、触媒3に燃料成分を含まない空気が流入し、触媒3内に酸素が充満する。よって、燃料カットを終了して燃料供給を再開する直前の時点t1では、触媒3内に酸素吸蔵能一杯まで酸素を吸蔵している。酸素吸蔵能は触媒3の経時劣化とともに低下するため、時点t1において触媒3に吸蔵している酸素の絶対量は不明である。だが、図7に示すように、燃料供給再開後に触媒3から放出した酸素の量Oを考えれば、燃料供給再開時点t1における酸素放出量Oを常に0とすることができる。
【0029】
モデル数式(数2)を援用し、モデルパラメータθ1を酸素吸蔵速度または酸素放出速度を示すモデルパラメータθ2に置き換えると、酸素放出量Oのモデル数式として下式(数3)を得られる。
【0030】
【数3】
【0031】
酸素放出量Oは、触媒3内に酸素が充満した状態を基準(O=0)とし、燃料カットを実行する都度その値が0にリセットされる。
【0032】
モデルパラメータθ2は、触媒3が酸素を放出する(λ≦1となる)期間と、触媒3が酸素を吸蔵する(λ>1となる)期間とで相異する。しかしながら、反応速度比kは、触媒3の経時劣化によらず一定であることが分かっている。図5に示している反応速度比k(Ga)を用いれば、モデルパラメータθ2を下式(数4)のように設定することができる。
【0033】
【数4】
【0034】
上式(数4)のモデルパラメータθ2は、マップデータとしてRAM52またはROM53に記憶保持させておけばよい。
【0035】
電子制御装置5は、酸素放出量Oに適宜に目標値を設定し、モデル数式に則って推算した酸素放出量Oをその目標値に収束させるフィードバック制御を実施する。即ち、推算した現在の酸素放出量Oとその目標値との偏差に基づいて燃料噴射量のフィードバック補正量を算出し、要求燃料噴射量に加味する。これにより、空燃比の振動を抑圧してウィンドウ内に維持する。
【0036】
その上で、本実施形態では、触媒3からの酸素放出量Oの推算精度を向上させるべく、酸素放出量Oの推算式(数3)及び(数4)に、推算誤差を補正、縮小するための学習パラメータβを導入することとしている。
【0037】
学習部14たる電子制御装置5は、所定の燃料カット条件が成立し、内燃機関2の気筒への燃料供給(燃料噴射)を一時中断する燃料カットが発生した時に、学習パラメータβを算定、その学習を実行する。燃料カット条件は、既存の自動車用内燃機関2に準ずる。例えば、エンジン回転数が一定以上あり、かつアイドルスイッチがONになった(または、アクセルペダルの踏込量が閾値以下となった)ことを条件とする。燃料カットは、エンジン回転数が所定の復帰回転数以下まで下がったり、アイドルスイッチがOFFになったりすると終了(燃料供給を再開)する。
【0038】
学習パラメータβを導入した酸素放出量Oの推算式は、下式(数5)となる。
【0039】
【数5】
【0040】
A/Fは第一の空燃比センサ11を介して検出したガスの空燃比、A/Ftargは目標空燃比である。このように、本実施形態では、空気過剰率λの分母に学習パラメータβを加味する。
【0041】
電子制御装置5は、パラメータβの学習に際し、燃料カット開始から第二の空燃比センサ12の出力がリーンになったことを示す所定値(第二の空燃比センサ12がO2センサである場合、例えば出力電圧=0.5V)に到達するまでの経過時間と、燃料カット開始からモデル数式(数5)に則って推算される放出量Oが0となるまでの経過時間とを計数し、両者の時間差に応じて、当該時間差を減少させる方向にパラメータβを増減させる。但し、後者の経過時間を計数するにあたり、モデル数式(数5)に適用する空気過剰率λとして、下記の式(数6)、式(数7)及び式(数8)の三つをそれぞれ用いる。
【0042】
【数6】
【0043】
【数7】
【0044】
【数8】
【0045】
β0は定数、ここでは0とする。eもまた定数であるが、第一の空燃比センサ11の計測する空燃比の公差に相当する値とする。第一の空燃比センサ11の公差が±0.05であるならば、その公差の絶対値をとってe=0.05とする。
【0046】
図9に、パラメータβの学習処理の手順を示す。電子制御装置5は、内燃機関2における燃料カットが発生したとき(ステップS1)、第二の空燃比センサ12の出力が非リーンを示しており(例えば、出力電圧>0.5V)、なおかつ、式(数6)、式(数7)、式(数8)に示す各空気過剰率λを適用して演算した酸素放出量O(数5)が何れも、前回の燃料カット終了から今回の燃料カット開始までの期間に一度も0になっていないことを条件として(ステップS2、S3)、パラメータβの学習を実施する。
【0047】
パラメータβの学習では、燃料カットの開始から、式(数6)の空気過剰率λを適用した酸素放出量O(数5)が0になるまでの時間TA、式(数7)の空気過剰率λを適用した酸素放出量Oが0になるまでの時間TB、並びに、式(数8)の空気過剰率λを適用した酸素放出量Oが0になるまでの時間TCをそれぞれ算出する(ステップS4ないしS6)。さらに、燃料カットの開始から、第二の空燃比センサ12の出力がリーンに切り替わる(例えば、出力電圧≦0.5V)までの時間TDを計測する(ステップS7)。図8に、燃料カット開始時点t2から計数される経過時間TA、TB、TC及びTDの例を示す。
【0048】
そして、経過時間TDと経過時間TAとの時間差を減少させるように、学習パラメータβを決定する。本実施形態では、TDとTAとの時間差を基に、補間法(内挿法)にて新たなパラメータβを算定する。即ち、TD>TAであるならば(ステップS8)βを下式(数9)とし(ステップS9)、TD<TAであるならばβを下式(数10)とする(ステップS10)。
【0049】
【数9】
【0050】
【数10】
【0051】
決定した学習パラメータβは、RAM52またはROM53に記憶保持する(ステップS11)。このβは、今回の燃料カットの終了後の空燃比制御において、次回の燃料カットが発生するまでの間、空燃比制御部13で反復演算する酸素放出量Oの推算式(数5)に適用される。
【0052】
本実施形態によれば、内燃機関2の排気通路に装着された排気ガス浄化用の触媒3の上流に設けられる第一の空燃比センサ11と、前記触媒3の下流に設けられる第二の空燃比センサ12と、少なくとも前記第一の空燃比センサの出力11を参照し、前記触媒3内に吸蔵した酸素量と当該触媒3の酸素吸蔵能との比である酸素割合のモデル数式に則り、触媒3内に酸素吸蔵能まで酸素を吸蔵した状態から酸素を放出した量Oを推算してその放出量Oを目標値にフィードバック制御する空燃比制御部13と、前記モデル数式に則って推算される放出量Oの誤差を縮小するための学習パラメータβを算定し記憶する学習部14とを具備する空燃比制御装置1において、前記学習部14が、内燃機関2における燃料カット発生時に前記学習パラメータβの算定を実行し、燃料カット開始から前記第二の空燃比センサ12の出力がリーンになったことを示す所定値(0.5V)に到達するまでの経過時間TDと、燃料カット開始から前記モデル数式に則って推算される放出量Oが0となるまでの経過時間TAとの時間差に応じて、当該時間差を減少させる方向に学習パラメータβを増減させるものとし、前記空燃比制御部13が、前記学習部14で記憶した学習パラメータβを加味した上でフィードバック制御を実施するものとしたため、酸素放出量Oの推算精度が向上し、触媒3下流にある第二の空燃比センサ12の出力信号の変動が触媒3内の空燃比の変動に対して遅延する問題を有効に回避できる。従って、触媒3の排気ガス浄化能率を高く保つことが可能となり、HC、CO及びNOxの排出量の一層の低減を図り得る上、触媒3に使用する貴金属量の削減にも資する。
【0053】
酸素放出量Oは、触媒3内に酸素が充満した状態を基準(O=0)とする値であり、これを制御量としていることで、触媒3の酸素吸蔵能の劣化の度合いに応じた目標値の設定変更が不要となっている。また、燃料カットを実行する度、酸素放出量Oの値が0にリセットされ、推算誤差もリセットされることから、高精度のフィードバック制御が実現される。しかも、燃料カットの機会は自動車の運転中しばしば訪れるので、自然にパラメータβの更新回数を増やすことができる。
【0054】
なお、本発明は以上に詳述した実施形態に限られるものではない。特に、学習パラメータβの算定式は、式(数9)及び式(数10)には限定されない。例えば、TD>TAならばβを所定量γ(例えば、γ=0.001)だけ増加させ、TD<TAならばβを所定量γだけ減少させる、というように、TDとTAとの大小関係に応じてβを増減させるようにしても構わない。
【0055】
その他各部の具体的構成は、本発明の趣旨を逸脱しない範囲で種々変形が可能である。
【産業上の利用可能性】
【0056】
本発明は、自動車等に搭載される内燃機関の制御に利用することができる。
【符号の説明】
【0057】
1…空燃比制御装置
11…第一の空燃比センサ
12…第二の空燃比センサ
13、5…空燃比制御部(電子制御装置)
14、5…学習部(電子制御装置)
2…内燃機関
3…触媒
【特許請求の範囲】
【請求項1】
内燃機関の排気通路に装着された排気ガス浄化用の触媒の上流に設けられる第一の空燃比センサと、
前記触媒の下流に設けられる第二の空燃比センサと、
少なくとも前記第一の空燃比センサの出力を参照し、前記触媒内に吸蔵した酸素量と当該触媒の酸素吸蔵能との比である酸素割合のモデル数式に則り、触媒内に酸素吸蔵能まで酸素を吸蔵した状態から酸素を放出した量を推算してその放出量を目標値にフィードバック制御する空燃比制御部と、
前記モデル数式に則って推算される放出量の誤差を縮小するための学習パラメータを算定し記憶する学習部と
を具備しており、
前記学習部は、内燃機関における燃料カット発生時に前記学習パラメータの算定を実行し、燃料カット開始から前記第二の空燃比センサの出力がリーンになったことを示す所定値に到達するまでの経過時間と、燃料カット開始から前記モデル数式に則って推算される放出量が0となるまでの経過時間との時間差に応じて、当該時間差を減少させる方向に学習パラメータを増減させるものであり、
前記空燃比制御部は、前記学習部で記憶した学習パラメータを加味した上でフィードバック制御を実施するものである
ことを特徴とする空燃比制御装置。
【請求項2】
前記モデル数式が、式(数11)の形で表される請求項1記載の空燃比制御装置。
【数11】
【請求項1】
内燃機関の排気通路に装着された排気ガス浄化用の触媒の上流に設けられる第一の空燃比センサと、
前記触媒の下流に設けられる第二の空燃比センサと、
少なくとも前記第一の空燃比センサの出力を参照し、前記触媒内に吸蔵した酸素量と当該触媒の酸素吸蔵能との比である酸素割合のモデル数式に則り、触媒内に酸素吸蔵能まで酸素を吸蔵した状態から酸素を放出した量を推算してその放出量を目標値にフィードバック制御する空燃比制御部と、
前記モデル数式に則って推算される放出量の誤差を縮小するための学習パラメータを算定し記憶する学習部と
を具備しており、
前記学習部は、内燃機関における燃料カット発生時に前記学習パラメータの算定を実行し、燃料カット開始から前記第二の空燃比センサの出力がリーンになったことを示す所定値に到達するまでの経過時間と、燃料カット開始から前記モデル数式に則って推算される放出量が0となるまでの経過時間との時間差に応じて、当該時間差を減少させる方向に学習パラメータを増減させるものであり、
前記空燃比制御部は、前記学習部で記憶した学習パラメータを加味した上でフィードバック制御を実施するものである
ことを特徴とする空燃比制御装置。
【請求項2】
前記モデル数式が、式(数11)の形で表される請求項1記載の空燃比制御装置。
【数11】
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−174426(P2011−174426A)
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願番号】特願2010−39569(P2010−39569)
【出願日】平成22年2月25日(2010.2.25)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願日】平成22年2月25日(2010.2.25)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
[ Back to top ]