
空物品特にプラスチックびん及び金属缶を回収する装置
本発明は、空物品特にプラスチックびん又は金属缶を回収する装置であって、空物品の搬送手段が、空物品を、集合投入空間(大量投入装置)から、検出装置に属する検出器のそばを通って導き、搬送方向において検出装置の後に、搬送手段から空物品を除去する投下手段が設けられているものに関する。本発明の課題は、このような装置に高い処理能力を与えることである。本発明によればこの課題は、急傾斜コンベア(3)として構成される搬送手段が連行体(8,28)上の空物品(10)を、集合投入空間(11)から平行させて、範囲装置にある検出器(15,32,33)へ供給することによって、解決される。更に装置は、異なる高さにある少なくとも2つの列で急傾斜コンベア(3)の全幅にわたって横に延びる放出手段(16,17)を持っている。本発明の別の特徴は、放出手段(16,17)が放出される空物品(10)を更に送るコンベヤベルト(18,19)に付属していることである。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、請求項1の上位概念に記載の空物品特にプラスチックびん及び金属缶を回収する装置に関する。
【背景技術】
【0002】
このような装置は特に空物品自動回収装置において使用される。この自動回収装置により、例えばびん及び缶の形の使い捨て空物品及び返却可能な空物品が回収される。その際個別投入システムと大量投入システムが区別される。
【0003】
個別投入システムを持つ空物品自動回収装置の例は国際公開第02/12095号に見られる。このような自動回収装置では、空物品は連続して順次手により投入され、それから運搬装置により連続的に即ち1列で個々に順次に検出装置のそばを通され、検出装置により空物品が形状の状態及び場合によってはそれ以外の特徴を検査される。
【0004】
大量投入システムを持つ空物品の自動回収装置は、ドイツ連那共和国の特許出願公開第102005025965号明細書、特許出願公開第10224010133号明細書に記載されている。これらの自動回収装置では、返却すべき空物品は個々に即ち1個ずつ投入されるのではなく、大量に即ちばら荷として投入される。投入は集合投入空間へ行われ、この集合投入空間から空物品が運搬装置により運搬される。従来技術による自動回収装置では、集合投入空間から空物品の連続的な個別化が行われ、それからこの配置で空物品が、個別投入システムにおけるように、運搬装置により検出装置のそばを通過せしめられ、この検出装置により空物品が順番に個々に検出される。
【0005】
ドイツ連邦共和国特許出願公開第102006011号明細書は、最初にあげた種類の装置を開示している。この装置では、搬送手段が水平に延びている。搬送手段は互いに間隔を置いた複数の搬送ベルトから成り、これらの搬送ベルトが検出装置のそばに空物品を通過させ、その際空物品は、搬送方向において検出装置の後で放出手段により、搬送ベルトのそばに設けられる集合容器へ放出される。放出手段は機械的突き棒であり、例えば空気圧で駆動され、動作の際搬送ベルトの間を通って下から上へ突き出し、こうして空物品を搬送ベルトから除去する。放出手段の動作は、検出装置で検出されるデータに基いて行われる。例えば缶が検出されると、缶用集合容器に付属する放出手段が動作せしめられる。この動作は連続的に行われる。
【0006】
上述した大量投入システムは、装置への空物品の投入が使用者にとって速くかつ問題がない。なぜならば、空物品は1つずつ個々に投入されるのではないからである。しかし投入後に行われる連続的な個別化のため、空物品の部分的には高い個別運搬速度にもかかわらず、装置の処理は多すぎる時間を必要とする、という欠点がある。
【発明の概要】
【発明が解決しようとする課題】
【0007】
従って本発明の課題は、空物品特にプラスチックびん及び金属缶を回収する装置を、高い処理能力で使用可能にすることである。
【課題を解決するための手段】
【0008】
本発明によればこの課題は、請求項1の特徴を持つ装置によって解決される。
【0009】
本発明によれば、集合容器からの空物品の搬出は平行にされて行われ、それにより検出装置に属する複数の検出器へ範囲配置で供給される。範囲配置とは、搬送手段上の空物品が搬送方向に見て順番に上下又は前後に配置されるだけでなく、同時に横に並んで設けられていることを意味する。そのため搬送手段が少なくとも2個の空物品を受入れることができる幅で構成されねばならないことは、明らかである。
【0010】
空物品の平行化又は平行な取扱いは、本発明による装置の引続く通過の際一貫して維持される。そのため放出手段が、異なる高さにある少なくとも2つの列で急傾斜コンベアの全幅にわたって横に設けられている。放出手段の列の数は、異なる空物品の数に合わされる。2つの異なる材料例えばPETびん及び金属缶から成る空物品のみを仮定すると、2列の放出手段で十分である。それぞれ放出手段の高さで急傾斜コンベアの前に設けられるコンベアベルトが放出される空物品を受入れて、急傾斜コンベアのそばに設けられる集合容器へ、空物品を更に送る。
【0011】
放出手段の上述した平行化のため、例えば急傾斜コンベア上に横に並んでいる3つの金属缶が、付属するコンベヤベルトへ同時に放出され、このコンベヤベルトにより集合容器へ送られる。
【0012】
本発明により構成される装置による空物品の処理能力は、従来技術から公知の装置と比較して著しく大きい。
【0013】
本発明の有利な構成は従属請求項からわかる。
【0014】
本発明が実施例により以下に詳細に説明される。
【図面の簡単な説明】
【0015】
【図1】 本発明による装置の第1実施例の側面図を示す。
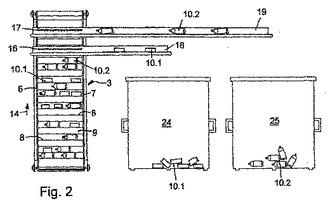
【図2】 見るのを妨げる部材を除いて図1による装置の正面図を示す。
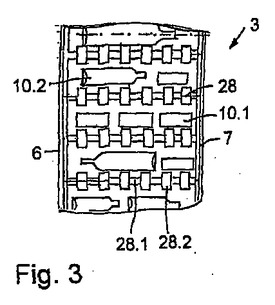
【図3】 本発明による装置の第2実施例の急傾斜コンベアの一部の正面図を示す。
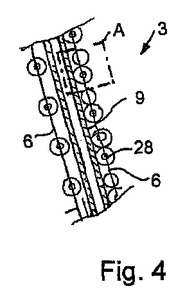
【図4】 図3の部分の側面図を示す。
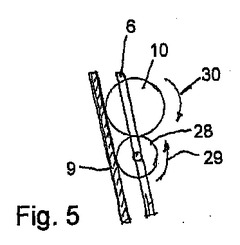
【図5】 図4の細部Aを拡大図で示す。
【図6】 検出装置に属するカメラの検出範囲を持つ急傾斜コンベアの一部の斜視図を示す。
【発明を実施するための形態】
【0016】
図面に示されている装置1は、PETびん10.2及び金属缶10.1の回収のために設計されている。これは、例えば急傾斜コンベア3が設けられるコンテナ2の形のハウジングを持っている。急傾斜コンベア3の傾斜角αは、この実施例では60°〜85°の範囲にある。このコンベアは、その両方の縦辺に、上部転向ローラ4及び下部転向ローラ7の周りを循環する伝動鎖6,7(図2)を持っている。少なくとも上部転向ローラ4が電動機で駆動されている。伝動鎖6,7に、搬送方向(図1及び2の矢印14)に対して直角にかつほぼ同じ相互間隔で設けられる多数の桟状連行体8が取付けられている。急傾斜コンベア3の上辺の後に定置当接面9が設けられて、連行体8に載る空物品10がこれらの連行体8の間から後方へ落ちるのを防止する。
【0017】
急傾斜コンベア3の下端には、上方へ開くホッパ状集合投入空間11が設けられている。集合投入空間11の底12は、急傾斜コンベア3の方へ下方へ傾斜して延びている。集合投入空間11はコンテナ2の前壁2.1を通って外方へ延び、それにより上方へ開く投入開口13へ空物品10が、例えばポケットからあけることにより、いわば散荷として投入される。集合投入空間11の底12の傾斜のため、空物品10は重力の作用で急傾斜コンベア3の方へ転がるか又は滑る。急傾斜コンベア3の連行体8は集合投入空間11を通り、それにより連行体8に載る空物品10が連行される。連行体8は、搬送方向14に対して直角に、少なくとも2個の空物品10が横に並んで連行体8上で横たわることができるような幅を持っている。
【0018】
急傾斜コンベア3は、集合投入空間11から空物品10を上方へ、図示してない検出装置に属するカメラ15及び金属検出器32のそばを通って送る(図1)。カメラ15は、空物品10を照らす図示しないハロゲン光源が付属しているラインカメラである。カメラ15の検出範囲は少なくとも急傾斜コンベア3の全幅を持っている。カメラ15はポリエチレン(PET)のスベクトル反射にプログラミングされているので、急傾斜コンベア3上にあるPET製空物品10が検出される。カメラ15は同時に急傾斜コンベア3上の空物品10の形状及び位置も検出する。カメラ15は、図示しないデータ線路を介して図示しない制御装置に接続されている。
【0019】
カメラ15は、金属缶10.1の形状及び位置を検出するように設計されているが、その材料を検出するようには設計されていないので、上述したように、カメラ15に加えて金属検出器32が設けられている。その際当接面9の後で搬送方向14に対して直角に1列に設けられている多数のセンサが重要である。センサは、その数が多いため位置の解明を可能にし、従ってカメラ15に加えて急傾斜コンベア3上の金属缶10.1の位置を検出する個別の測定点を形成する。しかしセンサは、空物品10が金属から成る空物品であるか否かを特に検出する。金属検出器32も同様に、図示しないデータ線路を介して制御装置に接続されている。金属缶10.1がアルミニウムから成る場合、金属検出器32として渦電流センサが使用される。
【0020】
搬送方向14においてカメラ15及び金属検出器32より上に、搬送方向14に対して直角に2列の空気ノズル16及び17が設けられ、急傾斜コンベア3の全幅にわたって延びている。空気ノズル16,17の範囲において当接面9がスリットを切られているので、空気ノズル16,17の出口は連行体8の間の範囲への入口を持っている。
【0021】
上述した図示しない制御装置は、カメラ15及び金属検出器32により検出されるデータ(空物品10の種類及び急傾斜コンベア3上の位置)に応じて、空気ノズル16,17を制御する。下の列の空気ノズル16の駆動により、連行体8に載る金属缶10.1が、急傾斜コンベア3から適切に吹き飛ばされ、即ち除去すべき1つの金属缶10.1又は吹き飛ばすべき複数の金属缶10.1の後に設けられている空気ノズル16が短い突風を出し、それにより金属缶10.1が急傾斜コンベア3から放出される。上の列の空気ノズル17の駆動により、急傾斜コンベア3からPETびん10.2の適切な除去が行われる。
【0022】
空気ノズル16,17の範囲にそれぞれ1つのコンベヤベルト18,19が設けられて、急傾斜コンベア3に対してそれぞれ直角に延びている。空物品10は、図1に関して、空気ノズル16又は17により、急傾斜コンベア3から斜め前上方へ吹き離される。少なくとも急傾斜コンベア3の範囲において、コンベヤベルト18,19は、急傾斜コンベア3の方へ入口開口22及び23を向けるハウジング20及び21を持っている。これらの入口開口22,23を通って、空物品10がハウジング20,21へ吹込まれ、コンベヤベルト18,19上へ確実に達する。
【0023】
下部コンベヤベルト18は金属缶10.1を第1の集合容器24へ送り、その上に設けられるコンベヤベルト19はPETびん10.2を第2の集合容器25へ送る。
【0024】
カメラ15及び金属検出器32により検出されない空物品10は、急傾斜コンベア3により空気ノズル16,17のそばを通って更に上方へ送られ、上部転向ローラ4を通過した後戻し降下筒26内へ達する。この戻し降下筒26は、集合投入空間11のそばにあるコンテナ2の前壁2.1を通って外部へ通じているので、そこに取出し開口27が形成されている。この取出し開口27から、装置1によって回収されなかった空物品10を再び取出すことができる。
【0025】
投入開口13及び取出し開口27のそばに、コンテナ2の前壁2.1に、別の素子例えば表示装置(図示せず)及び返却証明用発行装置(図示せず)を設けることができる。
【0026】
装置1は、PETびん10.2及び金属缶10.1の回収のために説明された。この装置1により別又はそれ以外の空物品10も当然回収することができる。PETびん10.2及び金属缶10.1に加えて、例えばPVCから成るプラスチックびんを回収しようとすれば、別の空気ノズル列、別のコンベヤベルト及び別の集合容器を設けさえすればよい。その場合カメラ15は更にPVCを検出するようにプログラミングせねばならない。
【0027】
装置1の上述した実施例により、空物品10をその種類例えば金属缶10.1、PETびん10.2等に従って回収することができる。それに加えて空物品10の周囲にある特定の表面印刷例えばバーコード、安全符号などを検出しようとすれば、装置1を変更することができる。この変更された実施例では、装置1は図1及び2に示す装置と原理的に同じ構造を持つ。両方の実施例の相違が、図3〜6により以下に説明される。同じ又は機能的に同じ部材に対しては、第1実施例と同じ符号が用いられている。
【0028】
急傾斜コンベア3は、この第2実施例においても、両方の縦辺において循環する伝動鎖6,7を持ち、第1実施例とは異なり、搬送方向14に対して直角に設けられるローラ28が、伝動鎖6,7に回転可能に支持されている。ローラ28は、均一な間隔で周囲に分布して伝動鎖6及び7に支持され、交互に小さい直径の部分28.1と大きい直径の部分28.2を持っている。ローラ28は、伝動鎖6,7の少なくとも上辺で、剛性の定置当接面9上を走行し、それによりローラ28は摩擦係合により回転駆動される。
【0029】
急傾斜コンベア3の傾斜角αは、この実施例では最大90°とすることができる。この場合ローラ28は、搬送すべき空物品10がローラ28から前方へ滑り落ちることがないようにするため、搬送すべき空物品10の最大直径より大きい直径を持たねばならない。
【0030】
急傾斜コンベア3のローラ28は集合投入空間11を通過し、それにより空物品10は、ローラ28の大きい直径の部分28.2上に載って連行される。ローラ28は、搬送方向14に対して直角に、例えば図3からわかるように、少なくとも2個の空物品10が1つのローラ28上に載ることができるような幅を持っている。
【0031】
急傾斜コンベア3により空物品10を運搬する際、ローラ28が当接面9上を走行し、それにより図5に矢印29で示すように、反時計方向に回転駆動される。ローラ28上に支持される空物品10は、それにより図5に矢印30で示すように、時計方向に駆動される。この回転方向のため、空物品10は当接面9へ押付けられるので、ローラ28から落下することがない。
【0032】
この実施例でも急傾斜コンベア3は、図6に示すように、図示しない検出装置に属するカメラ33及び金属検出器32のそばを通って空物品10を導く。このカメラ33は多重検出カメラであり、即ちこのカメラ33は画像を記録し、スペクトル分析することもできる。その代わりに、空物品10上の印刷を検出できるようにするため、第1実施例のカメラ15(ラインカメラ)のほかに、第2のカメラ(マトリクスカメラ)を使用することができる。
【0033】
カメラ33は広がりのある検出範囲31を持っている。この検出範囲31は急傾斜コンベア3の全幅を持ち、検出範囲31の高さHは、それが最大直径を持つ空物品10の周面にあるすべての標識、バーコード、その他の画像特徴を確実に検出することができる。カメラ33は、適当な機能照明により、特定の角度で急傾斜コンベア3に対して適当な間隔をおいて設けられ、従って回転する空物品10の上方運搬中に、その周囲にあるすべての標識等を光電的に実時間で検出することができる。更にカメラ3は、PETびん10.2及び急傾斜コンベア3上の空物品10の姿勢を検出する。金属缶10.1の材料及びその長さは金属検出器32により検出される。
【0034】
空物品10の放出及び集合容器24,25への運搬は、第1実施例におけるように行われる。
【技術分野】
【0001】
本発明は、請求項1の上位概念に記載の空物品特にプラスチックびん及び金属缶を回収する装置に関する。
【背景技術】
【0002】
このような装置は特に空物品自動回収装置において使用される。この自動回収装置により、例えばびん及び缶の形の使い捨て空物品及び返却可能な空物品が回収される。その際個別投入システムと大量投入システムが区別される。
【0003】
個別投入システムを持つ空物品自動回収装置の例は国際公開第02/12095号に見られる。このような自動回収装置では、空物品は連続して順次手により投入され、それから運搬装置により連続的に即ち1列で個々に順次に検出装置のそばを通され、検出装置により空物品が形状の状態及び場合によってはそれ以外の特徴を検査される。
【0004】
大量投入システムを持つ空物品の自動回収装置は、ドイツ連那共和国の特許出願公開第102005025965号明細書、特許出願公開第10224010133号明細書に記載されている。これらの自動回収装置では、返却すべき空物品は個々に即ち1個ずつ投入されるのではなく、大量に即ちばら荷として投入される。投入は集合投入空間へ行われ、この集合投入空間から空物品が運搬装置により運搬される。従来技術による自動回収装置では、集合投入空間から空物品の連続的な個別化が行われ、それからこの配置で空物品が、個別投入システムにおけるように、運搬装置により検出装置のそばを通過せしめられ、この検出装置により空物品が順番に個々に検出される。
【0005】
ドイツ連邦共和国特許出願公開第102006011号明細書は、最初にあげた種類の装置を開示している。この装置では、搬送手段が水平に延びている。搬送手段は互いに間隔を置いた複数の搬送ベルトから成り、これらの搬送ベルトが検出装置のそばに空物品を通過させ、その際空物品は、搬送方向において検出装置の後で放出手段により、搬送ベルトのそばに設けられる集合容器へ放出される。放出手段は機械的突き棒であり、例えば空気圧で駆動され、動作の際搬送ベルトの間を通って下から上へ突き出し、こうして空物品を搬送ベルトから除去する。放出手段の動作は、検出装置で検出されるデータに基いて行われる。例えば缶が検出されると、缶用集合容器に付属する放出手段が動作せしめられる。この動作は連続的に行われる。
【0006】
上述した大量投入システムは、装置への空物品の投入が使用者にとって速くかつ問題がない。なぜならば、空物品は1つずつ個々に投入されるのではないからである。しかし投入後に行われる連続的な個別化のため、空物品の部分的には高い個別運搬速度にもかかわらず、装置の処理は多すぎる時間を必要とする、という欠点がある。
【発明の概要】
【発明が解決しようとする課題】
【0007】
従って本発明の課題は、空物品特にプラスチックびん及び金属缶を回収する装置を、高い処理能力で使用可能にすることである。
【課題を解決するための手段】
【0008】
本発明によればこの課題は、請求項1の特徴を持つ装置によって解決される。
【0009】
本発明によれば、集合容器からの空物品の搬出は平行にされて行われ、それにより検出装置に属する複数の検出器へ範囲配置で供給される。範囲配置とは、搬送手段上の空物品が搬送方向に見て順番に上下又は前後に配置されるだけでなく、同時に横に並んで設けられていることを意味する。そのため搬送手段が少なくとも2個の空物品を受入れることができる幅で構成されねばならないことは、明らかである。
【0010】
空物品の平行化又は平行な取扱いは、本発明による装置の引続く通過の際一貫して維持される。そのため放出手段が、異なる高さにある少なくとも2つの列で急傾斜コンベアの全幅にわたって横に設けられている。放出手段の列の数は、異なる空物品の数に合わされる。2つの異なる材料例えばPETびん及び金属缶から成る空物品のみを仮定すると、2列の放出手段で十分である。それぞれ放出手段の高さで急傾斜コンベアの前に設けられるコンベアベルトが放出される空物品を受入れて、急傾斜コンベアのそばに設けられる集合容器へ、空物品を更に送る。
【0011】
放出手段の上述した平行化のため、例えば急傾斜コンベア上に横に並んでいる3つの金属缶が、付属するコンベヤベルトへ同時に放出され、このコンベヤベルトにより集合容器へ送られる。
【0012】
本発明により構成される装置による空物品の処理能力は、従来技術から公知の装置と比較して著しく大きい。
【0013】
本発明の有利な構成は従属請求項からわかる。
【0014】
本発明が実施例により以下に詳細に説明される。
【図面の簡単な説明】
【0015】
【図1】 本発明による装置の第1実施例の側面図を示す。
【図2】 見るのを妨げる部材を除いて図1による装置の正面図を示す。
【図3】 本発明による装置の第2実施例の急傾斜コンベアの一部の正面図を示す。
【図4】 図3の部分の側面図を示す。
【図5】 図4の細部Aを拡大図で示す。
【図6】 検出装置に属するカメラの検出範囲を持つ急傾斜コンベアの一部の斜視図を示す。
【発明を実施するための形態】
【0016】
図面に示されている装置1は、PETびん10.2及び金属缶10.1の回収のために設計されている。これは、例えば急傾斜コンベア3が設けられるコンテナ2の形のハウジングを持っている。急傾斜コンベア3の傾斜角αは、この実施例では60°〜85°の範囲にある。このコンベアは、その両方の縦辺に、上部転向ローラ4及び下部転向ローラ7の周りを循環する伝動鎖6,7(図2)を持っている。少なくとも上部転向ローラ4が電動機で駆動されている。伝動鎖6,7に、搬送方向(図1及び2の矢印14)に対して直角にかつほぼ同じ相互間隔で設けられる多数の桟状連行体8が取付けられている。急傾斜コンベア3の上辺の後に定置当接面9が設けられて、連行体8に載る空物品10がこれらの連行体8の間から後方へ落ちるのを防止する。
【0017】
急傾斜コンベア3の下端には、上方へ開くホッパ状集合投入空間11が設けられている。集合投入空間11の底12は、急傾斜コンベア3の方へ下方へ傾斜して延びている。集合投入空間11はコンテナ2の前壁2.1を通って外方へ延び、それにより上方へ開く投入開口13へ空物品10が、例えばポケットからあけることにより、いわば散荷として投入される。集合投入空間11の底12の傾斜のため、空物品10は重力の作用で急傾斜コンベア3の方へ転がるか又は滑る。急傾斜コンベア3の連行体8は集合投入空間11を通り、それにより連行体8に載る空物品10が連行される。連行体8は、搬送方向14に対して直角に、少なくとも2個の空物品10が横に並んで連行体8上で横たわることができるような幅を持っている。
【0018】
急傾斜コンベア3は、集合投入空間11から空物品10を上方へ、図示してない検出装置に属するカメラ15及び金属検出器32のそばを通って送る(図1)。カメラ15は、空物品10を照らす図示しないハロゲン光源が付属しているラインカメラである。カメラ15の検出範囲は少なくとも急傾斜コンベア3の全幅を持っている。カメラ15はポリエチレン(PET)のスベクトル反射にプログラミングされているので、急傾斜コンベア3上にあるPET製空物品10が検出される。カメラ15は同時に急傾斜コンベア3上の空物品10の形状及び位置も検出する。カメラ15は、図示しないデータ線路を介して図示しない制御装置に接続されている。
【0019】
カメラ15は、金属缶10.1の形状及び位置を検出するように設計されているが、その材料を検出するようには設計されていないので、上述したように、カメラ15に加えて金属検出器32が設けられている。その際当接面9の後で搬送方向14に対して直角に1列に設けられている多数のセンサが重要である。センサは、その数が多いため位置の解明を可能にし、従ってカメラ15に加えて急傾斜コンベア3上の金属缶10.1の位置を検出する個別の測定点を形成する。しかしセンサは、空物品10が金属から成る空物品であるか否かを特に検出する。金属検出器32も同様に、図示しないデータ線路を介して制御装置に接続されている。金属缶10.1がアルミニウムから成る場合、金属検出器32として渦電流センサが使用される。
【0020】
搬送方向14においてカメラ15及び金属検出器32より上に、搬送方向14に対して直角に2列の空気ノズル16及び17が設けられ、急傾斜コンベア3の全幅にわたって延びている。空気ノズル16,17の範囲において当接面9がスリットを切られているので、空気ノズル16,17の出口は連行体8の間の範囲への入口を持っている。
【0021】
上述した図示しない制御装置は、カメラ15及び金属検出器32により検出されるデータ(空物品10の種類及び急傾斜コンベア3上の位置)に応じて、空気ノズル16,17を制御する。下の列の空気ノズル16の駆動により、連行体8に載る金属缶10.1が、急傾斜コンベア3から適切に吹き飛ばされ、即ち除去すべき1つの金属缶10.1又は吹き飛ばすべき複数の金属缶10.1の後に設けられている空気ノズル16が短い突風を出し、それにより金属缶10.1が急傾斜コンベア3から放出される。上の列の空気ノズル17の駆動により、急傾斜コンベア3からPETびん10.2の適切な除去が行われる。
【0022】
空気ノズル16,17の範囲にそれぞれ1つのコンベヤベルト18,19が設けられて、急傾斜コンベア3に対してそれぞれ直角に延びている。空物品10は、図1に関して、空気ノズル16又は17により、急傾斜コンベア3から斜め前上方へ吹き離される。少なくとも急傾斜コンベア3の範囲において、コンベヤベルト18,19は、急傾斜コンベア3の方へ入口開口22及び23を向けるハウジング20及び21を持っている。これらの入口開口22,23を通って、空物品10がハウジング20,21へ吹込まれ、コンベヤベルト18,19上へ確実に達する。
【0023】
下部コンベヤベルト18は金属缶10.1を第1の集合容器24へ送り、その上に設けられるコンベヤベルト19はPETびん10.2を第2の集合容器25へ送る。
【0024】
カメラ15及び金属検出器32により検出されない空物品10は、急傾斜コンベア3により空気ノズル16,17のそばを通って更に上方へ送られ、上部転向ローラ4を通過した後戻し降下筒26内へ達する。この戻し降下筒26は、集合投入空間11のそばにあるコンテナ2の前壁2.1を通って外部へ通じているので、そこに取出し開口27が形成されている。この取出し開口27から、装置1によって回収されなかった空物品10を再び取出すことができる。
【0025】
投入開口13及び取出し開口27のそばに、コンテナ2の前壁2.1に、別の素子例えば表示装置(図示せず)及び返却証明用発行装置(図示せず)を設けることができる。
【0026】
装置1は、PETびん10.2及び金属缶10.1の回収のために説明された。この装置1により別又はそれ以外の空物品10も当然回収することができる。PETびん10.2及び金属缶10.1に加えて、例えばPVCから成るプラスチックびんを回収しようとすれば、別の空気ノズル列、別のコンベヤベルト及び別の集合容器を設けさえすればよい。その場合カメラ15は更にPVCを検出するようにプログラミングせねばならない。
【0027】
装置1の上述した実施例により、空物品10をその種類例えば金属缶10.1、PETびん10.2等に従って回収することができる。それに加えて空物品10の周囲にある特定の表面印刷例えばバーコード、安全符号などを検出しようとすれば、装置1を変更することができる。この変更された実施例では、装置1は図1及び2に示す装置と原理的に同じ構造を持つ。両方の実施例の相違が、図3〜6により以下に説明される。同じ又は機能的に同じ部材に対しては、第1実施例と同じ符号が用いられている。
【0028】
急傾斜コンベア3は、この第2実施例においても、両方の縦辺において循環する伝動鎖6,7を持ち、第1実施例とは異なり、搬送方向14に対して直角に設けられるローラ28が、伝動鎖6,7に回転可能に支持されている。ローラ28は、均一な間隔で周囲に分布して伝動鎖6及び7に支持され、交互に小さい直径の部分28.1と大きい直径の部分28.2を持っている。ローラ28は、伝動鎖6,7の少なくとも上辺で、剛性の定置当接面9上を走行し、それによりローラ28は摩擦係合により回転駆動される。
【0029】
急傾斜コンベア3の傾斜角αは、この実施例では最大90°とすることができる。この場合ローラ28は、搬送すべき空物品10がローラ28から前方へ滑り落ちることがないようにするため、搬送すべき空物品10の最大直径より大きい直径を持たねばならない。
【0030】
急傾斜コンベア3のローラ28は集合投入空間11を通過し、それにより空物品10は、ローラ28の大きい直径の部分28.2上に載って連行される。ローラ28は、搬送方向14に対して直角に、例えば図3からわかるように、少なくとも2個の空物品10が1つのローラ28上に載ることができるような幅を持っている。
【0031】
急傾斜コンベア3により空物品10を運搬する際、ローラ28が当接面9上を走行し、それにより図5に矢印29で示すように、反時計方向に回転駆動される。ローラ28上に支持される空物品10は、それにより図5に矢印30で示すように、時計方向に駆動される。この回転方向のため、空物品10は当接面9へ押付けられるので、ローラ28から落下することがない。
【0032】
この実施例でも急傾斜コンベア3は、図6に示すように、図示しない検出装置に属するカメラ33及び金属検出器32のそばを通って空物品10を導く。このカメラ33は多重検出カメラであり、即ちこのカメラ33は画像を記録し、スペクトル分析することもできる。その代わりに、空物品10上の印刷を検出できるようにするため、第1実施例のカメラ15(ラインカメラ)のほかに、第2のカメラ(マトリクスカメラ)を使用することができる。
【0033】
カメラ33は広がりのある検出範囲31を持っている。この検出範囲31は急傾斜コンベア3の全幅を持ち、検出範囲31の高さHは、それが最大直径を持つ空物品10の周面にあるすべての標識、バーコード、その他の画像特徴を確実に検出することができる。カメラ33は、適当な機能照明により、特定の角度で急傾斜コンベア3に対して適当な間隔をおいて設けられ、従って回転する空物品10の上方運搬中に、その周囲にあるすべての標識等を光電的に実時間で検出することができる。更にカメラ3は、PETびん10.2及び急傾斜コンベア3上の空物品10の姿勢を検出する。金属缶10.1の材料及びその長さは金属検出器32により検出される。
【0034】
空物品10の放出及び集合容器24,25への運搬は、第1実施例におけるように行われる。
【特許請求の範囲】
【請求項1】
空物品特にプラスチックびん又は金属缶を回収する装置であって、空物品の搬送手段が、空物品を、集合投入空間(大量投入装置)から、検出装置に属する検出器のそばを通って導き、搬送方向において検出装置の後に、搬送手段から空物品を除去する放出手段が設けられているものにおいて、
急傾斜コンベア(3)として構成される搬送手段が連行体(8,28)上の空物品(10)を、集合投入空間(11)から平行させて、範囲配置で検出器(15,32,33)へ供給し、
放出手段(16,17)が、異なる高さにある少なくとも2つの列で急傾斜コンベア(3)の全幅にわたって横に延びており、
それぞれ放出手段(16,17)の高さで急傾斜コンベア(3)の前に設けられるコンベアベルト(18,19)が、放出される空物品(10)を受入れて、急傾斜コンベア(3)のそばに設けられる集合容器(24,25)へ、空物品(10)を更に送る
ことを特徴とする、装置。
【請求項2】
放出手段が圧縮空気で動作可能な空気ノズル(16,17)として構成されていることを特徴とする、請求項1に記載の装置。
【請求項3】
コンベアベルト(18,19)が、放出手段(16,17)の範囲に、急傾斜コンベア(3)の方へ向く入口開口(22,23)を有するハウジング(20,21)を持っていることを特徴とする、請求項1又は2に記載の装置。
【請求項4】
急傾斜コンベア(3)が空物品(10)用当接面(9)を持ち、連行体(8,28)が、両端で、当接面(9)の周りを循環する伝動鎖(6,7)に支持されていることを特徴とする、先行する請求項の1つに記載の装置。
【請求項5】
連行体が、両端を伝動鎖(6,7)に回転可能に支持されているローラ(28)から形成されていることを特徴とする、請求項4に記載の装置。
【請求項6】
ローラ(28)の回転駆動が当接面(9)との摩擦係合によって行われることを特徴とする、請求項5に記載の装置。
【請求項7】
急傾斜コンベア(3)が60°〜85°の傾斜角αを持っていることを特徴とする、先行する請求項の1つに記載の装置。
【請求項1】
空物品特にプラスチックびん又は金属缶を回収する装置であって、空物品の搬送手段が、空物品を、集合投入空間(大量投入装置)から、検出装置に属する検出器のそばを通って導き、搬送方向において検出装置の後に、搬送手段から空物品を除去する放出手段が設けられているものにおいて、
急傾斜コンベア(3)として構成される搬送手段が連行体(8,28)上の空物品(10)を、集合投入空間(11)から平行させて、範囲配置で検出器(15,32,33)へ供給し、
放出手段(16,17)が、異なる高さにある少なくとも2つの列で急傾斜コンベア(3)の全幅にわたって横に延びており、
それぞれ放出手段(16,17)の高さで急傾斜コンベア(3)の前に設けられるコンベアベルト(18,19)が、放出される空物品(10)を受入れて、急傾斜コンベア(3)のそばに設けられる集合容器(24,25)へ、空物品(10)を更に送る
ことを特徴とする、装置。
【請求項2】
放出手段が圧縮空気で動作可能な空気ノズル(16,17)として構成されていることを特徴とする、請求項1に記載の装置。
【請求項3】
コンベアベルト(18,19)が、放出手段(16,17)の範囲に、急傾斜コンベア(3)の方へ向く入口開口(22,23)を有するハウジング(20,21)を持っていることを特徴とする、請求項1又は2に記載の装置。
【請求項4】
急傾斜コンベア(3)が空物品(10)用当接面(9)を持ち、連行体(8,28)が、両端で、当接面(9)の周りを循環する伝動鎖(6,7)に支持されていることを特徴とする、先行する請求項の1つに記載の装置。
【請求項5】
連行体が、両端を伝動鎖(6,7)に回転可能に支持されているローラ(28)から形成されていることを特徴とする、請求項4に記載の装置。
【請求項6】
ローラ(28)の回転駆動が当接面(9)との摩擦係合によって行われることを特徴とする、請求項5に記載の装置。
【請求項7】
急傾斜コンベア(3)が60°〜85°の傾斜角αを持っていることを特徴とする、先行する請求項の1つに記載の装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2012−523321(P2012−523321A)
【公表日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2012−506334(P2012−506334)
【出願日】平成22年2月5日(2010.2.5)
【国際出願番号】PCT/DE2010/000144
【国際公開番号】WO2010/115389
【国際公開日】平成22年10月14日(2010.10.14)
【出願人】(511114313)
【Fターム(参考)】
【公表日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成22年2月5日(2010.2.5)
【国際出願番号】PCT/DE2010/000144
【国際公開番号】WO2010/115389
【国際公開日】平成22年10月14日(2010.10.14)
【出願人】(511114313)
【Fターム(参考)】
[ Back to top ]