
空間予測近似と半径方向の畳み込み積分
本発明は、三次元座標系に対する対象ポイントのロケーションを近似する為の方法を提供し、カメラの視界内に対象ポイントが入るよう対象ポイントへカメラの方向を合せるステップと、三次元座標系に対するロケーションと、カメラの向き及びカメラのチルトを含むカメラポジションとを含むカメラデータを検索するステップと、関連地形図データベースへ問合せ、カメラの向きに沿った地形図上に位置決めされている1以上の座標を識別し、第1のデータセットを形成するステップと、カメラの向き及びカメラのチルトに基づき、カメラと対象ポイントとの間の半径方向平面上に位置決めされている1以上の座標を計算し、第2のデータセットを形成するステップと、第1のデータセットと第2のデータセットとを比較し一致する座標対を識別するステップとを含み、一致する座標が対象ポイントの三次元座標位置を表す。本方法を実行する為のシステム及びソフトウェアも提供する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般に、三次元座標系に対する対象ポイント(a point of interest)のロケーションの近似に関し、より具体的には、カメラの視界内でユーザにより選択される対象ポイントのロケーションを近似することに関する。本発明は、特にデジタルマッピング及び地理情報システム技術に関連し、以下、便宜上、本発明を本明細書において述べる。
【背景技術】
【0002】
野外で観測者により観測される対象ポイントのマップ座標を確定するには、従来、比較的粗雑な手法を伴う。このような手法の1つに、三角測量がある。三角測量は、距離ベクトルを確定するために、様々な角度における既知の点から2つ、または理想的には3つの重なり合う視界を確定し、距離ベクトルの交点に基づき、対象ポイントにおけるマップ座標を近似する際に用いることが出来る距離ベクトルを確定することを含んでいる。その結果は、手作業で、マップまたはグリッド座標、もしくは、好ましくは地理コード化された電子地形図上へ表わすことが出来る緯度の値及び経度の値に置き換えられる。代替手法として、対象ポイント、例えば、火災の近似ロケーションを示す煙に対する方位角(a directional bearing)及びピッチ(pitch)/チルト(tilt)を求めるためにオズボーン・デバイス(Osborne Device)を用いることが含まれる場合がある。
【0003】
これらの従来の手法は、時間を浪費し、かつ資源集約的であり、精度も初歩的なものでしかない。一部の専門家は、三角測量技術を用いた場合に、一般的な精度の期待値がおよそ±300メートルであり、かつ、三角測量手法にとっての理想的な条件、即ち、極めて良い視認性で、かつ、少なくとも3つの重なり合う視界で、座標を確定するために20分以上を要することを提案している。
【0004】
従って、先行技術による手法による問題のうちの少なくとも1つを改善する、三次元座標系に対する対象ポイントのポジションを近似するための改良された方法を提供することが望ましい。
【0005】
当業者にとって、以下の明細書並びに図面を参照することで、本発明のその他の目的及び利点が明らかとなる。
【発明の概要】
【課題を解決するための手段】
【0006】
本発明の一態様によれば、三次元座標系に対する対象ポイントのロケーションを近似するための方法が提供されている。本方法は、
(a)前記対象ポイントがカメラの視界内に入るように、前記対象ポイントへカメラの方向を合わせるステップと、
(b)前記三次元座標系に対するカメラのロケーションと、カメラの向き及びカメラのチルトを含むカメラのポジションとを含むカメラデータを検索するステップと、
(c)関連の地形図データベースを問合わせを行い、前記カメラの向きに沿って地形図上に位置決めされている1つ以上の座標を識別し、第1のデータセットを形成するステップと、
(d)前記カメラの向き及び前記カメラのチルトに基づいて、前記カメラと前記対象ポイントとの間の半径方向平面上に位置決めされている1つ以上の座標を計算し、第2のデータセットを形成するステップと、
(e)前記第1のデータセットと前記第2のデータセットとを比較し、一致する座標対を識別するステップとを含み、
一致する座標が、前記対象ポイントの三次元座標位置を表わす。
【0007】
カメラの視界は、カメラから遠隔に位置決めされているクライアントユーザ端末に提供されるグラフィックユーザインタフェース上へ表示される。カメラは、スチルカメラ、または、より好ましくはビデオカメラであってもよい。カメラの配置は固定されるため既知であってもよく、もしくは、カメラが移動する車両または航空機に取り付けられている場合のように動的であってもよい。後者の場合、カメラの配置は、GPSまたは他の適切な手段を介して決定され、かつサーバを介してクライアントユーザ端末へリアルタイムで送信される。
【0008】
ある実施形態によれば、カメラデータを検索するステップが、前記カメラのチルト及びパン値(a pan value)に基づいて、前記対象ポイントに対応するカメラの向きを計算するステップを含む。
【0009】
本方法は、前記対象ポイントの前記三次元座標位置を検証できるように、前記カメラロケーションと前記対象ポイントとの間の高度(height)または標高(altitude)及び水平距離(a horizontal distance)の差を決定するステップをさらに含む。
【0010】
別の実施形態によれば、前記カメラと前記対象ポイントとの間の半径方向平面上に位置決めされている1つ以上の座標が、前記半径方向平面に沿って所定の間隔で計算される。好ましくは、前記所定の間隔が、利用可能な地形上の間隔と一致する。
【0011】
さらに別の実施形態によれば、前記対象ポイントを選択するステップは、対象エリアを表わす多角形を画定する3つ以上の点を選択し、各点が前記多角形を画定するように前期カメラの方向を合わせることを含む。本方法はさらに、ステップ(b)からステップ(e)までを繰り返して前記対象エリアを画定する各点のポジションを近似することを含む。
【0012】
或いは、前記対象ポイントを選択するステップは、前記電子地形図上で対象エリアを表わす多角形を画定する3つ以上の点を選択し、かつ、前記地形図データベースに問合わせを行い、前記多角形を画定する各点に対応する地形図座標を検索することを含む。
【0013】
本方法は、対象エリアを表わす多角形を画定する各点の前記三次元座標位置を検証できるように、前記カメラロケーションと前記多角形を画定する各点との間の高度または標高及び水平距離の差を決定するステップをさらに含む。
【0014】
本発明の一形式において、本方法はさらに、前記対象ポイントまたは前記対象エリアを表わす多角形を画定する3つ以上の点に対応する三次元座標を識別する地形図をユーザに示すステップを含む。
【0015】
本発明の別の態様によれば、ユーザが選択したカメラを三次元座標系内に位置決めされている対象ポイントへ方向を合わせるための方法が提供されている。前記対象ポイントが、地形図のグラフィックユーザインタフェース上でユーザによって選択される。本方法は、
(a)地形図データベースから前記対象ポイントの三次元座標位置を検索するステップと、
(b)前記三次元座標系に対するロケーションを含むカメラデータと、カメラの向き及びカメラのチルトを含む初期のカメラポジションとを検索するステップと、
(c)前記三次元座標系に対する前記カメラロケーションを使用し、必要なカメラの向き及び必要なカメラのチルトを含む必要なカメラポジションを決定するステップであって、前記対象ポイントがカメラの視界内に入るステップと、
(d)前記初期のカメラポジションから前記必要なカメラポジションへ前記カメラを移動させるために、前記必要なカメラの向き及び前記必要なカメラのチルトを前記カメラへ送信するステップとを含む。
【0016】
本発明のさらに別の態様によれば、三次元座標系内に位置決めされている対象ポイントの最適な視界を与えるカメラを識別する方法が提供されている。前記対象ポイントが、電子地形図上でユーザによって選択される。本方法は、
(a)地形図データベースから、前記三次元座標系に対する前記対象ポイントの実際のロケーションを検索するステップと、
(b)前記対象ポイントに近接して位置決めされている1つ以上のカメラを識別するステップと、
(c)近接する各カメラについて、前記三次元座標系に対するカメラロケーションを検索するステップと、
(d)前記地形図データベースに問合せを行い、前記カメラと前記対象ポイントとの間のカメラの向きに沿って地形図上に位置決めされている、地形標高値(a topographic elevation value)を含む座標を検索するステップと、
(e)近接する各カメラについて、前記カメラと前記対象ポイントとの間の半径方向平面に沿って位置決めされている、理論上の標高値(a theoretical elevation value)を含む一連の理論座標(theoretical coordinates)を計算するステップと、
(f)前記地形標高値を前記理論上の標高値と比較するステップであって、
前記対象ポイントの明瞭な視界は、前記理論上の標高値が地形標高値以上の場合に前記カメラから入手可能であるステップと、
(g)近接する各カメラについて、ステップ(d)からステップ(f)までを繰り返し、近接するカメラのうちで前記対象ポイントの明瞭な視界を入手できるカメラを識別するステップとを含む。
【0017】
ある実施形態では、本方法はさらに、前記対象ポイントの最適な視界を与えるカメラのためにカメラの向き及びカメラのチルトを含むカメラポジションを計算するステップと、前記要求されたカメラポジションを前記カメラへ送信し、初期のカメラポジションから前記必要なカメラポジションへ前記カメラを移動させるために、ステップとを含み、前記対象ポイントが、前記カメラのカメラ視界内にある。
【0018】
前記対象ポイントへの明瞭な視界は、近接する2つ以上のカメラから入手可能であれば、前記対象ポイントの最も近くに位置決めされているカメラが前記対象ポイントのロケーションを入れるために選択されてもよい。
【0019】
前記対象ポイントへの明瞭な視界が、近接するカメラから入手できなければ、前記対象ポイントに最も近い代替ポイントへ明瞭な視界を与えるカメラが選択されてもよい。
【0020】
本発明の一形式では、前記カメラが、前記座標系に関して固定されたロケーションを有する。
【0021】
本発明のさらに別の態様によれば、三次元座標系に対する対象ポイントのロケーションを近似するためのシステムが提供されている。本システムは、
(a)ユーザが前記対象ポイントをカメラの視界内で見ることができるように、前記対象ポイントへ方向を合わせるカメラと、
(b)前記三次元座標系に対するカメラロケーションとカメラの向き及びカメラのチルトを含むカメラポジションとを含むカメラデータを格納するための第1のデータベースと、
(c)電子地形図データを格納するための第2のデータベースと、
(d)前記カメラの向きに沿って前記電子地形図上に位置決めされている1つ以上の座標を識別し、第1のデータセットを形成するため、および、前記カメラの向き及び前記カメラのチルトに基づいて、前記カメラと前記対象地点との間の半径方向平面上に位置決めされている1つ以上の座標を計算し、第2のデータセットを形成するためのプロセッサとを含み、
前記第1のデータセットと前記第2のデータセットとの比較が、前記対象ポイントの前記三次元座標位置を表わす一致する座標対を識別する。
【0022】
好ましくは、本システムは、電子地形図上の前記対象ポイントに対応する前記三次元座標のロケーションが示されるグラフィックユーザインタフェースを含む。さらに好ましくは、グラフィックユーザインタフェースがさらに、ユーザが選択したカメラからのカメラ視界も示す。
【図面の簡単な説明】
【0023】
以下、便宜上、本発明の理解を容易にするために、図面を参照して本発明をさらに詳しく説明する。図面及び関連する説明の詳細は、請求の範囲に記載された本発明の広範な同定の一般性に優先するものとして理解されるべきではない。
【図1】ある実施形態による本発明の方法を実施するためのシステム例である。
【図2】本発明の方法を実施するために必須の主要構成要素を示す図である。
【図3】本発明のコアプロセスの動作を示すフローチャートである。
【図4】ある実施形態によるターゲットモード(target mode)における本発明の方法の動作を示すフローチャートである。
【図5】図4に示す方法による対象ポイント座標の近似を検証するための方法を示すフローチャートである。
【図6】ある実施形態によるジオフェンスモード(geo−fence mode)における本発明の方法の動作を示すフローチャートである。
【図7】ある実施形態による逆ルックアップモード(reverse lookup mode)における本発明の方法の動作を示すフローチャートである。
【図8】ある実施形態による仮想三角測量モード(virtual triangulation mode)における本発明の方法の動作を示すフローチャートである。
【図9】ある実施形態による本発明のキャリブレーションシステム(calibrating the system)の方法を示すフローチャートである。
【図10】図1のコンピュータ対応システムの様々な機能構成要素をブロック形式で示す略図である。
【発明を実施するための形態】
【0024】
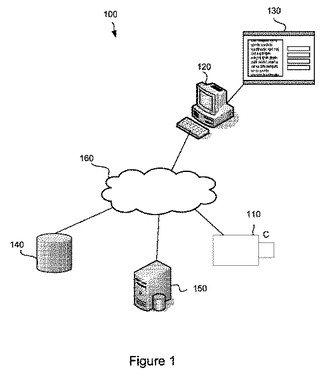
まず、図1を参照すると、本発明の方法を実施するためのシステム例100が示されている。本システムは、単一のカメラ視界を空間データと共に使用し、カメラの視界を介して見られる対象ポイントの地図上のロケーション、例えば、火災または目標物(object)のロケーションを決定する。システム100は、野外に位置決めされる1つ以上のカメラ110と、グラフィックユーザインタフェース130を提供するクライアントユーザ端末120と、サーバ150及びクライアントユーザ端末120と通信するデータベース140とを備える。1つ以上のカメラ110、クライアントユーザ端末120及びサーバ150は、インターネットまたは私設ネットワーク(a private network)等の適切な通信ネットワーク160によって相互接続される。
【0025】
グラフィックユーザインタフェース130は、ユーザに、対象ポイントのロケーションが空間的に示され、即ち電子地形図上のみならず野外に位置決めされたカメラにより獲得されたカメラの視界内においても示され、対象ポイントの実世界でのロケーションが示される電子地形図を表示する。
【0026】
一般に地形図データを備える空間データは、緯度、経度及び高度または標高(Gx,y,zとして格納される)の形式である市販の地形図データであってもよく、かつ、クライアントユーザ端末110から遠隔で、関係機関、例えばランドヴィクトリア(Land Victoria)によりデータベース140内に保持されてもよい。データベース140内に格納されている空間データについての問合せは、ユーザによりクライアント端末110を介して開始される。ユーザは、グラフィックユーザインタフェース130上に提供されるカメラ視界機能及び制御装置を使用してカメラの視界を対象ポイント(以後、「POI」とも称する)へ方向を合わせる。空間データが、遠隔的にデータベース140内に保持されてもよいが、本データが、ユーザ端末110へCD−ROMまたは他の携帯式または非携帯式データ格納装置等の他の任意の便利な形で、局部的または遠隔的にアクセス可能にされてもよいことは認識される。
本発明のシステムは、カメラ視界のグラフィックユーザインタフェース上に提供される、例えばパン、チルト及びズームといったカメラ制御(以下、「“PTZ”コントロール」という)を使用し、システム並びに電子地形図への入力を制御する。本システムは、カメラのロケーション及びポジションに基づいて、向き及びチルトデータをカメラから抽出し、かつ、カメラの軌跡(図2において半径方向平面230として示されている)とトポグラフィ(the topography)または地形とが交差するポイントを確定するために、カメラと同じ向きまたは方位角に関するこのデータと標高データ(カメラのロケーションを示す三次元座標より既知である)を処理する。この交点は、好ましくは、電子地形図上へ表示するために緯度/経度/高度フォーマット(Lat/Long/Alt format)に形式を変える。
【0027】
ネットワーク内の他のカメラが、エラーの確認を提供し、かつ/または精度を向上させるために、単一のカメラ視界から取得されるデータと連携及び/又は単一のカメラ視界から取得されるデータを検証するために使用されてもよい。これは特に、低い可視状態において、かつ/または対象ポイントが遮られている場合に有益である。このような場合、対象ポイントに代わる、かつ最適なカメラ視界を識別するために、仮想三角測量は、複数の近接するカメラの重なり合う視界の間で編成され得る。
【0028】
単一のカメラ視界を使用して対象ポイントのポジションを確定するために、三次元座標(「タプル(tuple)」)のカメラロケーションは既知でなければならない。従って、固定式または可動式カメラのロケーションは、既知であり、かつ、カメラデータベースに(Cx,y,zの形で)格納される。動的ロケーションを有する可動式カメラの場合、即ち、移動する車両または航空機上に設置されるカメラの場合、カメラのロケーションに対応する座標は、GPSまたはこれに類似する手段等の位置決めシステムを使用して決定され、かつリアルタイムでサーバへ送信される。野外カメラは、真北方位角(方位角)に合わせて調整され、かつ半径方向の水平面に高さを合わせて置かれる。これを達成するために、野外カメラは、Calx,y,zの形で予め決められた、または既知の位置座標を有する既知の調査ポイントまたはランドマークを使用して調整される。
【0029】
要約すれば、本発明のシステムは、下記の異なる4つのモードで動作することができる。
1. ターゲットモード
動作−ユーザは、カメラ(PTZ)コントロールを採用して、対象ポイントがグラフィックユーザインタフェース上にスチルまたはビデオ画像として表示されるカメラ視界の略中心にくるまでカメラの方向を合わせる。次に、ユーザは、グラフィックユーザインタフェースを介して「ターゲット」プロセスを開始する。
結果−電子マーカ及び対象ポイントのロケーションに対応する座標(POIx,y,z)が電子地形図上に生成される。
2. ジオフェンスモード
動作−ユーザは、対象エリアを画定する多角形を形成するために最低3つの点を選択する。これは、ユーザがカメラ(PTZ)コントロールを採用し、対象エリアを画定する多角形の各点へとカメラの方向を合わせることを含んでもよく、かつ/または、ユーザは、一連のマウスクリックをマップ上で直に使用し、電子地形図上に対象エリアを画定する多角形を形成することもできる。対象エリアを画定することは、実際の対象ターゲットポイント(the actual target point)が真っ直ぐな視野方向からは分かりにくい場合に有益である。
結果−電子地形図上に強調表示された、または陰影付きの領域(多角形)が、多角形を画定する各点に対応する座標と共に生成される。
3. 逆ルックアップモード
動作−ユーザは、マップ上を直にクリックすることによって、電子地形図上で1つ以上のカメラ及び対象ポイントを選択する。
結果−電子地形図上に電子マーカが置かれ、かつ必要なカメラポジションが選択されたカメラへ自動的に送信されて、カメラの視界内に対象ポイントが現れるように1つ以上のカメラの方向を合わせる。次に、各カメラからのカメラ視界が、グラフィックユーザインタフェース上でユーザに表示される。
4. 仮想三角測量モード
動作−ユーザは、少なくとも1つのカメラ及び対象ポイントを選択し、システムは、1つ以上のカメラのうちが対象ポイントまでの最適な視野方向を与えるかを決定する。次に、最適な視野方向を有するカメラは、対象ポイントまたは領域へと方向づけられてもよい。
結果−ユーザに対象ポイントの最適な視界を提供する。最適なカメラ視界は、グラフィックユーザインタフェース上で識別され、オンスクリーンマーカ(a on scren marker)と共にユーザに表示される。さらに、重なり合うカメラの視界または電子地形図上で交差する軌跡である点が、計算され、かつVTx、y、zの形で表示され得る。
【0030】
以下、図2から図8までを参照して、上述のモードについてさらに詳しく説明する。
【0031】
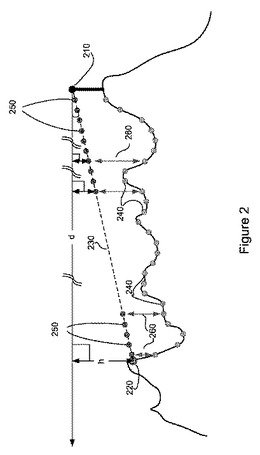
まず、図2を参照すると、カメラの視界内に対象ポイントを観測できるように、カメラ210の位置を対象ポイント(POI)220へ向けて合わせる。次に、システムは、既知のカメラロケーション座標(Cx,y,z)を検索し、カメラポジションデータ(Cp,t,z)についてカメラに問い合わせる。カメラポジションデータ(Cp,t,z)は、システムがカメラ210と対象ポイント220との間に位置決めされる半径方向平面230またはカメラの軌跡(「斜辺」ともいう。)を決定できるように、カメラ210の向きまたは方位角及びチルトを提供ために使用される。
【0032】
カメラ210と対象ポイント220との間、および、カメラと同じ向きであるが地勢上(the terrain)または地形(the topography)上に位置決めされる既知の地形座標(known topographic coordinates)は、地形図データベース(the topographic map data)から検索される。これらの座標は、既知の座標(Gx,y,z)240を備える第1のデータセットを形成する。
【0033】
中間座標(IPOIx,y,z)250の第2のデータセットは、カメラと同じ向きで、また、カメラ210と対象ポイント220との間の半径方向平面230に沿って計算される。中間座標(IPOIx,y,z)は、半径方向平面230に沿って予め決められ、好ましくは一定の間隔で計算される。例えば、これらの間隔は、地形図データベースから入手可能な基本的な地形上の間隔(即ち、既知の座標(Gx,y,z)240の間の距離)に対応していてもよい。
【0034】
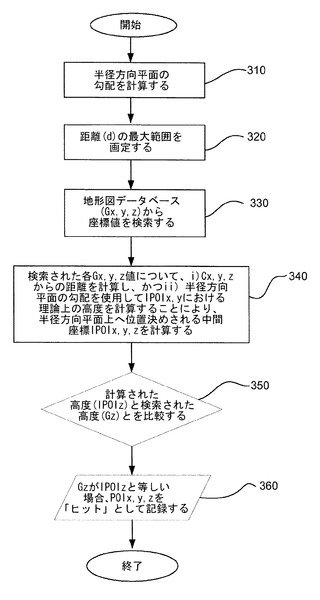
次に、図3を参照すると、コアプロセスまたはサブルーチンを使用して、第1及び第2のデータセット(即ち、検索される既知の座標(Gx,y,z)及び計算される中間座標(IPOIx,y,z)及び具体的には標高データ(IPOIz及びGz))が計算され、かつ比較される。サブルーチンは、ステップ310においてカメラポジションデータ(Cp,t,z)に基づいて、半径方向平面230の勾配を計算することと、ステップ320において処理されるべき最大距離(d)(図2参照)を画定することを含む。カメラと同じカメラの向きに位置決めされる既知の座標ポジション(Gx,y,z)は、ステップ330で地形図データベースから検索される。
【0035】
ステップ340では、既知の各座標セット(Gx,y,z)について、原点(即ち、カメラ位置Cx,y,z)からの距離(d)が計算され、かつ、半径方向平面の勾配を使用して、同一のGx、yロケーションにおける中間座標(IPOIz)の理論上の標高が計算される。半径方向平面と同じカメラの向きに沿った全ての点のx、yポジションが容易に推定される(即ち、Gx、yとIPOIx、yとが一致する)ことが与えられるとすれば、本発明の目的にとって、特別な関心事は、z座標または標高値である。その結果、ステップ350において、比較は本質的に、既知の標高値(Gz)と、各x、yポジションについて計算された理論上の標高値(IPOIz)との比較に縮尺される。一致(即ち、Gz=IPOIz)が生じると、実際の対象ポイント(POI)のx、y、z座標が特定されている。これは、半径方向平面(またはカメラの軌跡)が地勢または地形と交差する点である。次に、このx、y、z座標は、ステップ360において、システムにより実際のPOIx、y、z座標として記録され、格納される。
【0036】
「ヒット」及び「ニアミス」のしきい値は、一致が記録されるように予め定義されてもよい。一致を構成することに関してGzとIPOIzとの差が正確にゼロである必要はない。「ヒット」のしきい値内での一致は、一致として記録される。非一致は、「ニアミス」として記録される。
【0037】
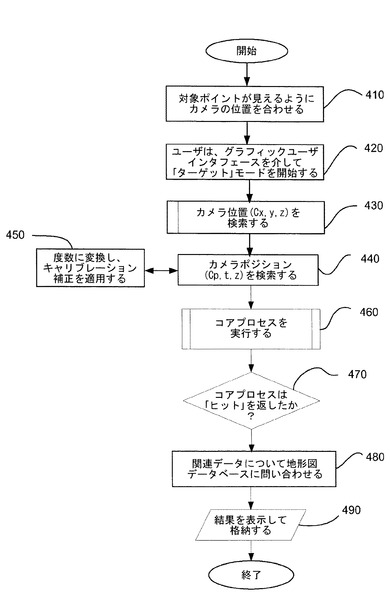
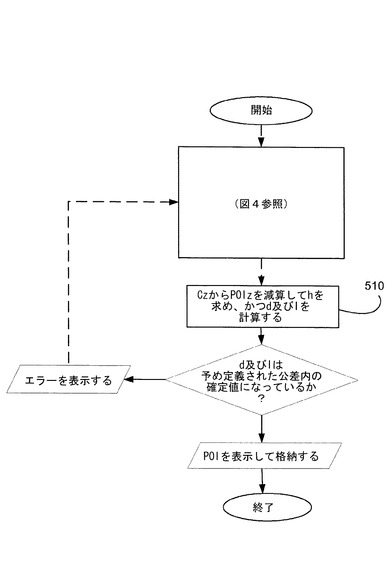
次に、図4を参照すると、「ターゲット」モードにおいて、対象ポイントのポジションを近似する方法を描いたフローチャートが示されている。ステップ410において、対象ポイントは、カメラの視界内で対象ポイントを観察できるようにカメラを位置合わせすることによって選択される。
【0038】
対象ポイントがカメラの視界内に位置決めされると、ユーザは、ステップ420において、グラフィックユーザインタフェースを介して「ターゲット」モードにおける近似プロセスを開始する。次にシステムは、ステップ430において、既知のカメラロケーション座標(Cx,y,z)を検索し、かつ、ステップ440において、カメラポジションデータ(Cp,t,z)についてカメラに問い合わせる。ステップ450では、カメラポジションデータ(Cp,t,z)が度数に変換され、かつ、キャリブレーション補正の適用によりカメラの向きまたは方位角及びチルトが提供される。
【0039】
次にシステムは、ステップ460において、図3を参照して述べたコアプロセスを実行し、第1及び第2のデータセットが計算され、かつ、比較される。ステップ470において、コアプロセスが「ヒット」、即ち、GzとIPOIzとの差がゼロ、または、「ヒット」を画定する予め決められたしきい値内という一致を返せば、ステップ480において、住所または他の空間データ等の任意の関連データについて地形データベースは問い合わされ、かつ、ステップ480において、システムによりx、y、z座標が実際のPOI座標(POIx,y,z)として記録され、かつ、格納される。
【0040】
次に、図5を参照すると、ステップ510において、実際の対象ポイントの座標POIx、y、zの近似は、カメラ位置Czと対象ポイントPOIzとの高度差または標高差を使用して、半径方向平面(即ち、「斜辺」)の長さ(l)及びカメラと対象ポイントとの間の隣接する水平距離(d)を計算することにより検証され得る(図2も参照)。これらの変数は、カメラのチルトを確認し、かつ、任意の偏差が許容の公差内にあることを決定するために使用される。データは、他の三角法による確認が、さらにデータを検証するために使用されてもよい。
【0041】
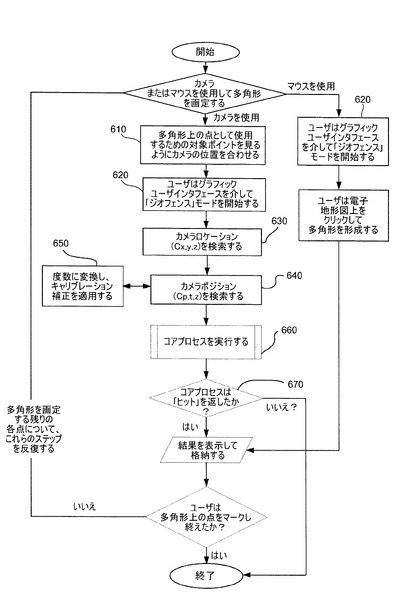
次に、図6を参照すると、ユーザが(対象ポイントまたは他の目標物を囲む場合のある)対象エリアを選択すれば、対象エリアのロケーションの近似は、システムを「ジオフェンス」モードで動作させることによって達成され得る。対象エリアは、ユーザが、対象ポイントを囲む、または、単に一般的な対象領域を画定できる多角形を画定する最低3つの点を選択することによって選択される。ステップ610において、多角形を画定する複数の点は、図4を参照して述べたカメラ視界機能を使用し、かつ/または電子地形図上でのマウスクリックを介して、ユーザにより選択されてもよい。ステップ620において、ユーザは、グラフィックユーザインタフェースを介して「ジオフェンス」モードにおけるプロセスを開始する。
【0042】
ユーザが、電子地形図上での一連のマウスクリックを介して多角形を画定する複数の点のうちの1つまたは1つ以上を選択すれば、各マウスクリックは、対象エリアを画定する各点に対応する既知の座標(Gx,y,z)について問い合わされる地形図データベースを生じる。
【0043】
多角形の一部を形成する点をマークするようにカメラの方向を合わせることによって画定される、対象エリアを画定する多角形の任意の1つ以上の点について、システムは、ステップ630において、カメラロケーションデータ(Cx,y,z)を検索し、かつ、ステップ640において、カメラに、対応するカメラポジションまたはオフセットデータ(Cp,t,z)に関する問合せを行う。ステップ650では、カメラポジションデータ(Cp,t,z)が度数に変換され、かつ、キャリブレーション補正の適用によりカメラの向き及びチルトが提供される。
【0044】
次にシステムは、ステップ660において、図3を参照して述べたコアプロセスを実行し、多角形を画定する第1の点に対応する第1及び第2のデータセットが計算され、かつ、比較される。ステップ670では、第1及び第2のデータセット(即ち、検索される既知の座標Gx、y、z及び計算される中間座標IPOIx、y、z)が比較される。一致すると、多角形を画定する第1の点のx、y、z座標が画定され(即ち、POIx,y,z)、かつ、マーカが電子地形図上に置かれる。これらのステップは、多角形を画定する残りの各点について反復される。次に、完成された多角形は、グラフィックユーザインタフェース上に設けられる電子地形図上で陰影をつけられた、或いは他に強調表示されたエリアとしてユーザに表示される。
【0045】
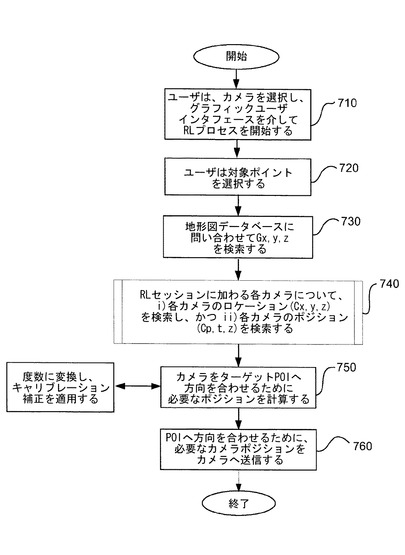
次に、図7を参照すると、「逆ルックアップ」モードは、ユーザが、ステップ710において「逆ルックアップ」セッションに加わるように選択される1つ以上のカメラを生じ、ステップ720において、ユーザにより選択されている対象ポイントへと向けさせることを可能にする。対象ポイントは、点を選択するマウスを使用して選択される。或いは、ポイントは、物理アドレス(例えば、住所)を入力することによって選択されてもよい。次に、システムは、ステップ730において、地形図データベースから対象ポイントのロケーションに対応する既知の座標を検索する(即ち、Gx,y,z=POIx,y,z)。
【0046】
ステップ740では、「逆ルックアップ」セッションに加わる各カメラについて、システムは、選択されたカメラのカメラロケーションデータ(Cx,y,z)及び現在のカメラポジションデータ(Cp,t,z)を検索する。ステップ750において、既知の対象ポイント座標(POIx,y,z)及びカメラロケーション(Cx,y,z)を使用して、システムは、必要なカメラポジション、即ち対象ポイントへカメラの方向を合わせるために必要なカメラの向き及びカメラのチルトを計算する。ステップ760では、必要なカメラポジションが、カメラをその現在のポジションから対象ポイントへ向かって移動させるためにカメラへ送信される。
【0047】
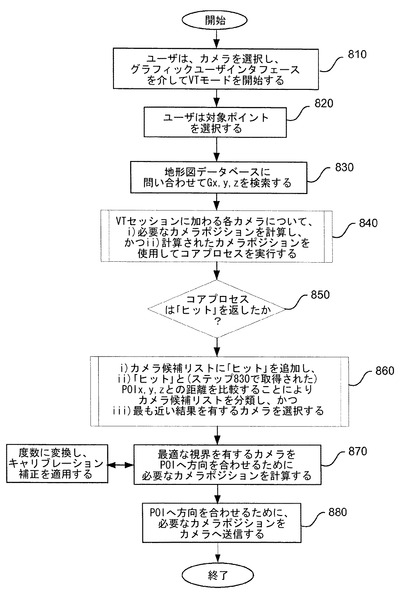
次に、図8を参照すると、対象ポイントの最良の視野方向に基づいて、ユーザに最適なカメラ視界を提供するために、「仮想三角測量」モードが使用される。ステップ810において、ユーザは主要なカメラを選択し、「仮想三角測量」モードを開始する。ステップ820では、ユーザによって対象ポイントが選択される。
【0048】
ステップ830において、システムは、地形図データベースに問い合わせ、地形図データベースから対象ポイントに対応する既知の座標(即ち、Gx,y,z=POIx,y,z)を検索する。次には、システムは、カメラデータベースに問い合わせ、どのカメラが対象ポイントに最も近いかを決定する、或いは、ユーザが仮想三角測量セッションに加わる主要なカメラに近接する1つ以上のカメラを手動で選択していてもよい。ユーザが選択する場合、または、システムが選択する場合の近接したカメラは、カメラ候補リストにおいて、仮想三角測量参与カメラとしてタグ付けされる。
【0049】
ステップ840では、各関与しているカメラ毎に、システムは、既知のカメラポジション(Cx,y,z)及び検索された既知の対象ポイント座標(POIx,y,z)(即ち、ステップ830で取得されたもの)を使用し、必要なカメラポジションを計算し、かつ、図3を参照して述べた理論上のコアプロセスを処理して、第1及び第2のデータセットを計算し、かつ、比較する。ステップ860において、システムは、カメラ候補リストの先頭が最も近い結果を与えるカメラとなるように、コアプロセスにより生成される「ヒット」とPOIx,y,z(ステップ830においてGx,y,z形式で取得される)との距離に基づいて、カメラ候補リストを分類する。ステップ870において、システムは、カメラ候補リストの先頭におけるカメラを対象ポイントへ向きを合わせるために必要なカメラポジションを計算する。ステップ880では、カメラをその現在のポジションから対象ポイントへ向きを合わせるために、必要なカメラポジションがカメラへ送信される。
【0050】
「ヒット」結果とPOIx,y,z(ステップ830で取得された)との間に一致が生じると、カメラは対象ポイントへの「明瞭な視野方向」を有するものとされる。対象ポイントへの明瞭な視界が、近接する2つ以上のカメラから入手可能である場合は、対象ポイントの最も近くに位置決めされるカメラが、対象ポイントのロケーションを観測するために選択されてもよい。
【0051】
任意に、システムが仮想三角測量モードで動作する間、電子地形図上に各カメラと対象ポイントとの間の軌跡線(trace lines)(カメラの向きまたは方位角を表わす)が与えられてもよい。これらの軌跡線は、システムにより決定される対象ポイントの座標に関してさらなる確認を実行できるようにする視覚的ガイドをユーザに提供する。この場合、対象ポイントは、軌跡線の交点に位置決めされるべきである。また、システムは、2つ以上のカメラからの軌跡線または軌跡の交点に基づいて、POIx,y,zを計算し、かつ、表示する伝統的な三角測量機能も提供する。
【0052】
次に、図9を参照すると、システムは、カメラの北オフセットを確立し、かつ、野外での各カメラの取り付けの不完全性またはカメラの水平の位置合わせに影響を与える場合がある他の任意の不完全性を補償するように意図された双方向性のキャリブレーション機能を組み込んでいる。その目的は、野外または領域内の全てのカメラを真北へと調整させ、かつ、水平の半径方向平面上で同じ高さに配置させることにある。
【0053】
既知のランドマークまたはキャリブレーションポイントのロケーションに対応する緯度/経度/高度データは、システムのデータベースにCal1x、y、z、Cal2x、y、z、他のフォーマットで入力される。各カメラは、関連する最低2つのキャリブレーションポイントを必要とし、かつ、カメラがこれらのランドマークを見るように方向を合わせる際の対応するカメラポジションがデータベースに格納される。
【0054】
キャリブレーションプロセス(The calibration process)は、ステップ910において、まずシステムがキャリブレーションポイントCal1を見るようにカメラの方向を合わせることを含む。次に、ステップ920において、ユーザは(PTZコントロールを使用して)、カメラの視界が、キャリブレーションポイントCal1を構成するランドマークを完全に獲得し、かつ、このランドマーク上に中心となることを確認するために必要とされる僅かな調整を行うように促される。カメラがCal1に真っ直ぐに向いていることをユーザが確認すると、ステップ930において、カメラはカメラポジションデータ(Cp,t,z)について問い合わされる。
【0055】
次に、ステップ940において、カメラはキャリブレーションポイントCal2を見るように方向を合わせる。次に、ステップ950において、ユーザは(PTZコントロールを使用して)、カメラの視界が、キャリブレーションポイントCal2を構成するランドマークを完全に獲得し、かつ、このランドマーク上に中心
となることを確認するために必要とされる僅かな調整を行うように促される。カメラがCal2に真っ直ぐに向いていることをユーザが確認すると、ステップ960において、カメラはカメラポジションデータ(Cp,t,z)について問い合わされる。
【0056】
次に、ステップ970において、カメラの北オフセットが計算される。キャリブレーションプロセスは、カメラロケーション(Cx,y,z)及び少なくとも1つの既知のキャリブレーションポイントのロケーション(例えば、Cal1x,y,z及び/またはCal2x,y,z)を使用して、カメラとキャリブレーションポイントとの間のグリッド方位を確定する。システムは、(a)カメラのロケーションとキャリブレーションポイントとの間の前方方位角と、(b)カメラがキャリブレーションポイントへ方向を合わせられる際のカメラのパン値との差を計算する。これが、カメラの北オフセットを確定する。好ましくは、北オフセットを確定するために2つ以上のキャリブレーションポイントが使用され、かつ、結果が平均される。
【0057】
ステップ980では、カメラからキャリブレーションポイントまでの期待傾斜角と、キャリブレーションポイントを見るようにカメラが位置合わせされる際にカメラから報告される実際のピッチ/チルト角とを比較することにより、適用される必要があるチルト補償の必要な度合いが計算される。次に、システムは、期待傾斜度と、2つのキャリブレーションポイントにおいてカメラにより報告されるチルト角との差に基づいて、パン度当たりでどれだけのチルトを調整する必要があるかを決定する。適用される必要があるチルト補償がゼロに等しい半径方向平面内の2点が計算され、ゼロクロス点と称される。
【0058】
計算された結果は、ステップ990において、システムにより新しいキャリブレーションデータとして格納される。
【0059】
システム100は、ハードウェア、ソフトウェアまたはこれらの組合せを使用して実施されてもよく、かつ1つ以上のコンピュータシステムまたは処理システムにおいて実施されてもよい。具体的には、クライアントユーザ端末120及びそのグラフィックユーザインタフェース130並びにサーバ150の機能は、これまでに述べた機能を実行可能な1つ以上のコンピュータシステムによって提供されてもよい。
【0060】
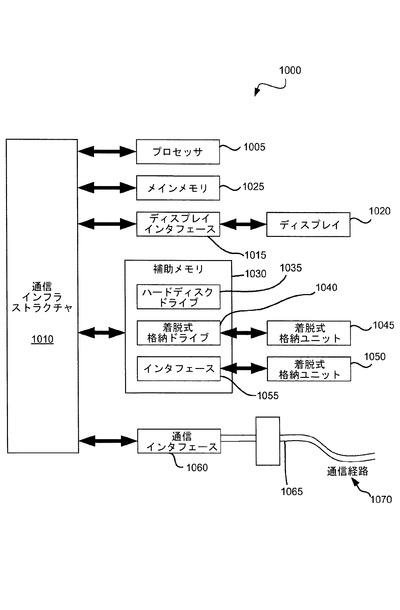
このようなコンピュータシステムを図10に示す。この図において、例示的なコンピュータシステム1000は、プロセッサ1005等の1つ以上のプロセッサを備える。プロセッサ1005は、通信インフラストラクチャ1010へ接続される。コンピュータシステム1000は、グラフィクス、テキスト及び他のデータを通信インフラストラクチャ1010からディスプレイユニット1020へ供給するために転送するディスプレイインタフェース1015を備えてもよい。コンピュータシステム1000は、好ましくはランダムアクセスメモリであるメインメモリ1025を備えてもよく、また、補助メモリ1030を備えてもよい。
【0061】
補助メモリ1030は、例えば、ハードディスクドライブ1035、磁気テープドライブ、光ディスクドライブ等を備えてもよい。取外し可能な格納ドライブ1040は、着脱式格納ユニット1045との間で読取り及び/または書込みを周知の方法で行なう。取外し着脱式格納ユニット1045は、フロッピーディスク、磁気テープ、光ディスク等を表わす。
【0062】
認識されるように、着脱式格納ユニット1045は、プロセッサ1005に所望される機能を実行させる一連の指令の形でコンピュータソフトウェアを内蔵している使用可能な格納媒体であるコンピュータを備える。代替実施形態では、補助メモリ1030は、コンピュータプログラムまたは指令がコンピュータシステム1000に搭載され得るための他の類似手段を備えてもよい。このような手段には、例えば着脱式格納ユニット1050及びインタフェース1055が備えられてもよい。
【0063】
また、コンピュータシステム1000は、通信インタフェース1060を備えてもよい。通信インタフェース1060は、コンピュータシステム1000と外部装置との間でソフトウェア及びデータが転送されることを可能にする。通信インタフェース1060の例には、モデム、ネットワークインタフェース、通信ポート、PCMCIAスロット及びカード等が備えられてもよい。通信インタフェース1060を介して転送されるソフトウェア及びデータは、通信インタフェース1060によって受信され得る電磁信号、電子信号、光信号または他の信号であってもよい信号1065の形である。信号は、ワイヤまたはケーブル、光ファイバ、電話回線、携帯電話リンク、無線周波数または他の通信チャネル等の通信経路1070を介して通信インタフェース1060へ供給される。
【0064】
これまでに述べた実施形態では、本発明が主としてコンピュータソフトウェアを使用して実施されているが、他の実施形態において、本発明は、例えば特定用途向けの集積回路(ASIC)等のハードウェアコンポーネントを使用して、主としてハードウェア内に実装されてもよい。本明細書に記載されている機能を実行するためのハードウェア状態のマシンの実装は、当業者には明白である。他の実施形態では、本発明は、ハードウェア及びソフトウェアの双方の組合せを使用して実施されてもよい。
【0065】
野外における対象ポイントの座標近似は、他の機能によって補足されてもよい。例えば、対象ポイントのロケーションを近似するためのシステムが、火災のロケーションを近似するために使用される場合、システムはさらに、ネットワークを介してチーム(例えば、消防隊または地域社会)に火災のロケーションを電子的に知らせ、SMS、eメール、音声またはライブチャットまたは音声通信を発動し、並びに、例えば野外の消防隊または地域社会にその現在のロケーションに基づく対象ポイントへの、または対象ポイントからの方向性を送信して、システムにより生成されるナビゲーションデータに基づいて、野外の消防隊のためにルートを計算するための手段を備えてもよい。他の空間データ、気象、衛星画像またはデータ、雷検出は、システムへの入力として使用され得る。
【0066】
本発明のシステムは、マッピングまたは三角測量プロセスに関して特別な知識を持たない完全に未熟なユーザが、1台のカメラを使用して数秒でこれらのプロセスを開始し、かつ、正確な結果に到達することを可能にする。
【0067】
本プロセスは、ロケーションを近似する精度及び速度を高める。これは、この演習を実行するのに必要とされる人的資源の数及び技能レベルを大幅に低減し、かつ、伝統的技術による処理時間を分単位(典型的には、15分から20分またはそれ以上)から数秒にまで短縮する。
【0068】
本発明を限られた数の実施形態に関連して説明したが、当業者には、これまでの説明に鑑みて多くの代替物、修正及び変形が可能であることが認識される。従って、本発明は、開示されている本発明の概念及び範囲内にあると思われるこのような全ての代替物、修正及び変形を包含するように意図されている。
【技術分野】
【0001】
本発明は、一般に、三次元座標系に対する対象ポイント(a point of interest)のロケーションの近似に関し、より具体的には、カメラの視界内でユーザにより選択される対象ポイントのロケーションを近似することに関する。本発明は、特にデジタルマッピング及び地理情報システム技術に関連し、以下、便宜上、本発明を本明細書において述べる。
【背景技術】
【0002】
野外で観測者により観測される対象ポイントのマップ座標を確定するには、従来、比較的粗雑な手法を伴う。このような手法の1つに、三角測量がある。三角測量は、距離ベクトルを確定するために、様々な角度における既知の点から2つ、または理想的には3つの重なり合う視界を確定し、距離ベクトルの交点に基づき、対象ポイントにおけるマップ座標を近似する際に用いることが出来る距離ベクトルを確定することを含んでいる。その結果は、手作業で、マップまたはグリッド座標、もしくは、好ましくは地理コード化された電子地形図上へ表わすことが出来る緯度の値及び経度の値に置き換えられる。代替手法として、対象ポイント、例えば、火災の近似ロケーションを示す煙に対する方位角(a directional bearing)及びピッチ(pitch)/チルト(tilt)を求めるためにオズボーン・デバイス(Osborne Device)を用いることが含まれる場合がある。
【0003】
これらの従来の手法は、時間を浪費し、かつ資源集約的であり、精度も初歩的なものでしかない。一部の専門家は、三角測量技術を用いた場合に、一般的な精度の期待値がおよそ±300メートルであり、かつ、三角測量手法にとっての理想的な条件、即ち、極めて良い視認性で、かつ、少なくとも3つの重なり合う視界で、座標を確定するために20分以上を要することを提案している。
【0004】
従って、先行技術による手法による問題のうちの少なくとも1つを改善する、三次元座標系に対する対象ポイントのポジションを近似するための改良された方法を提供することが望ましい。
【0005】
当業者にとって、以下の明細書並びに図面を参照することで、本発明のその他の目的及び利点が明らかとなる。
【発明の概要】
【課題を解決するための手段】
【0006】
本発明の一態様によれば、三次元座標系に対する対象ポイントのロケーションを近似するための方法が提供されている。本方法は、
(a)前記対象ポイントがカメラの視界内に入るように、前記対象ポイントへカメラの方向を合わせるステップと、
(b)前記三次元座標系に対するカメラのロケーションと、カメラの向き及びカメラのチルトを含むカメラのポジションとを含むカメラデータを検索するステップと、
(c)関連の地形図データベースを問合わせを行い、前記カメラの向きに沿って地形図上に位置決めされている1つ以上の座標を識別し、第1のデータセットを形成するステップと、
(d)前記カメラの向き及び前記カメラのチルトに基づいて、前記カメラと前記対象ポイントとの間の半径方向平面上に位置決めされている1つ以上の座標を計算し、第2のデータセットを形成するステップと、
(e)前記第1のデータセットと前記第2のデータセットとを比較し、一致する座標対を識別するステップとを含み、
一致する座標が、前記対象ポイントの三次元座標位置を表わす。
【0007】
カメラの視界は、カメラから遠隔に位置決めされているクライアントユーザ端末に提供されるグラフィックユーザインタフェース上へ表示される。カメラは、スチルカメラ、または、より好ましくはビデオカメラであってもよい。カメラの配置は固定されるため既知であってもよく、もしくは、カメラが移動する車両または航空機に取り付けられている場合のように動的であってもよい。後者の場合、カメラの配置は、GPSまたは他の適切な手段を介して決定され、かつサーバを介してクライアントユーザ端末へリアルタイムで送信される。
【0008】
ある実施形態によれば、カメラデータを検索するステップが、前記カメラのチルト及びパン値(a pan value)に基づいて、前記対象ポイントに対応するカメラの向きを計算するステップを含む。
【0009】
本方法は、前記対象ポイントの前記三次元座標位置を検証できるように、前記カメラロケーションと前記対象ポイントとの間の高度(height)または標高(altitude)及び水平距離(a horizontal distance)の差を決定するステップをさらに含む。
【0010】
別の実施形態によれば、前記カメラと前記対象ポイントとの間の半径方向平面上に位置決めされている1つ以上の座標が、前記半径方向平面に沿って所定の間隔で計算される。好ましくは、前記所定の間隔が、利用可能な地形上の間隔と一致する。
【0011】
さらに別の実施形態によれば、前記対象ポイントを選択するステップは、対象エリアを表わす多角形を画定する3つ以上の点を選択し、各点が前記多角形を画定するように前期カメラの方向を合わせることを含む。本方法はさらに、ステップ(b)からステップ(e)までを繰り返して前記対象エリアを画定する各点のポジションを近似することを含む。
【0012】
或いは、前記対象ポイントを選択するステップは、前記電子地形図上で対象エリアを表わす多角形を画定する3つ以上の点を選択し、かつ、前記地形図データベースに問合わせを行い、前記多角形を画定する各点に対応する地形図座標を検索することを含む。
【0013】
本方法は、対象エリアを表わす多角形を画定する各点の前記三次元座標位置を検証できるように、前記カメラロケーションと前記多角形を画定する各点との間の高度または標高及び水平距離の差を決定するステップをさらに含む。
【0014】
本発明の一形式において、本方法はさらに、前記対象ポイントまたは前記対象エリアを表わす多角形を画定する3つ以上の点に対応する三次元座標を識別する地形図をユーザに示すステップを含む。
【0015】
本発明の別の態様によれば、ユーザが選択したカメラを三次元座標系内に位置決めされている対象ポイントへ方向を合わせるための方法が提供されている。前記対象ポイントが、地形図のグラフィックユーザインタフェース上でユーザによって選択される。本方法は、
(a)地形図データベースから前記対象ポイントの三次元座標位置を検索するステップと、
(b)前記三次元座標系に対するロケーションを含むカメラデータと、カメラの向き及びカメラのチルトを含む初期のカメラポジションとを検索するステップと、
(c)前記三次元座標系に対する前記カメラロケーションを使用し、必要なカメラの向き及び必要なカメラのチルトを含む必要なカメラポジションを決定するステップであって、前記対象ポイントがカメラの視界内に入るステップと、
(d)前記初期のカメラポジションから前記必要なカメラポジションへ前記カメラを移動させるために、前記必要なカメラの向き及び前記必要なカメラのチルトを前記カメラへ送信するステップとを含む。
【0016】
本発明のさらに別の態様によれば、三次元座標系内に位置決めされている対象ポイントの最適な視界を与えるカメラを識別する方法が提供されている。前記対象ポイントが、電子地形図上でユーザによって選択される。本方法は、
(a)地形図データベースから、前記三次元座標系に対する前記対象ポイントの実際のロケーションを検索するステップと、
(b)前記対象ポイントに近接して位置決めされている1つ以上のカメラを識別するステップと、
(c)近接する各カメラについて、前記三次元座標系に対するカメラロケーションを検索するステップと、
(d)前記地形図データベースに問合せを行い、前記カメラと前記対象ポイントとの間のカメラの向きに沿って地形図上に位置決めされている、地形標高値(a topographic elevation value)を含む座標を検索するステップと、
(e)近接する各カメラについて、前記カメラと前記対象ポイントとの間の半径方向平面に沿って位置決めされている、理論上の標高値(a theoretical elevation value)を含む一連の理論座標(theoretical coordinates)を計算するステップと、
(f)前記地形標高値を前記理論上の標高値と比較するステップであって、
前記対象ポイントの明瞭な視界は、前記理論上の標高値が地形標高値以上の場合に前記カメラから入手可能であるステップと、
(g)近接する各カメラについて、ステップ(d)からステップ(f)までを繰り返し、近接するカメラのうちで前記対象ポイントの明瞭な視界を入手できるカメラを識別するステップとを含む。
【0017】
ある実施形態では、本方法はさらに、前記対象ポイントの最適な視界を与えるカメラのためにカメラの向き及びカメラのチルトを含むカメラポジションを計算するステップと、前記要求されたカメラポジションを前記カメラへ送信し、初期のカメラポジションから前記必要なカメラポジションへ前記カメラを移動させるために、ステップとを含み、前記対象ポイントが、前記カメラのカメラ視界内にある。
【0018】
前記対象ポイントへの明瞭な視界は、近接する2つ以上のカメラから入手可能であれば、前記対象ポイントの最も近くに位置決めされているカメラが前記対象ポイントのロケーションを入れるために選択されてもよい。
【0019】
前記対象ポイントへの明瞭な視界が、近接するカメラから入手できなければ、前記対象ポイントに最も近い代替ポイントへ明瞭な視界を与えるカメラが選択されてもよい。
【0020】
本発明の一形式では、前記カメラが、前記座標系に関して固定されたロケーションを有する。
【0021】
本発明のさらに別の態様によれば、三次元座標系に対する対象ポイントのロケーションを近似するためのシステムが提供されている。本システムは、
(a)ユーザが前記対象ポイントをカメラの視界内で見ることができるように、前記対象ポイントへ方向を合わせるカメラと、
(b)前記三次元座標系に対するカメラロケーションとカメラの向き及びカメラのチルトを含むカメラポジションとを含むカメラデータを格納するための第1のデータベースと、
(c)電子地形図データを格納するための第2のデータベースと、
(d)前記カメラの向きに沿って前記電子地形図上に位置決めされている1つ以上の座標を識別し、第1のデータセットを形成するため、および、前記カメラの向き及び前記カメラのチルトに基づいて、前記カメラと前記対象地点との間の半径方向平面上に位置決めされている1つ以上の座標を計算し、第2のデータセットを形成するためのプロセッサとを含み、
前記第1のデータセットと前記第2のデータセットとの比較が、前記対象ポイントの前記三次元座標位置を表わす一致する座標対を識別する。
【0022】
好ましくは、本システムは、電子地形図上の前記対象ポイントに対応する前記三次元座標のロケーションが示されるグラフィックユーザインタフェースを含む。さらに好ましくは、グラフィックユーザインタフェースがさらに、ユーザが選択したカメラからのカメラ視界も示す。
【図面の簡単な説明】
【0023】
以下、便宜上、本発明の理解を容易にするために、図面を参照して本発明をさらに詳しく説明する。図面及び関連する説明の詳細は、請求の範囲に記載された本発明の広範な同定の一般性に優先するものとして理解されるべきではない。
【図1】ある実施形態による本発明の方法を実施するためのシステム例である。
【図2】本発明の方法を実施するために必須の主要構成要素を示す図である。
【図3】本発明のコアプロセスの動作を示すフローチャートである。
【図4】ある実施形態によるターゲットモード(target mode)における本発明の方法の動作を示すフローチャートである。
【図5】図4に示す方法による対象ポイント座標の近似を検証するための方法を示すフローチャートである。
【図6】ある実施形態によるジオフェンスモード(geo−fence mode)における本発明の方法の動作を示すフローチャートである。
【図7】ある実施形態による逆ルックアップモード(reverse lookup mode)における本発明の方法の動作を示すフローチャートである。
【図8】ある実施形態による仮想三角測量モード(virtual triangulation mode)における本発明の方法の動作を示すフローチャートである。
【図9】ある実施形態による本発明のキャリブレーションシステム(calibrating the system)の方法を示すフローチャートである。
【図10】図1のコンピュータ対応システムの様々な機能構成要素をブロック形式で示す略図である。
【発明を実施するための形態】
【0024】
まず、図1を参照すると、本発明の方法を実施するためのシステム例100が示されている。本システムは、単一のカメラ視界を空間データと共に使用し、カメラの視界を介して見られる対象ポイントの地図上のロケーション、例えば、火災または目標物(object)のロケーションを決定する。システム100は、野外に位置決めされる1つ以上のカメラ110と、グラフィックユーザインタフェース130を提供するクライアントユーザ端末120と、サーバ150及びクライアントユーザ端末120と通信するデータベース140とを備える。1つ以上のカメラ110、クライアントユーザ端末120及びサーバ150は、インターネットまたは私設ネットワーク(a private network)等の適切な通信ネットワーク160によって相互接続される。
【0025】
グラフィックユーザインタフェース130は、ユーザに、対象ポイントのロケーションが空間的に示され、即ち電子地形図上のみならず野外に位置決めされたカメラにより獲得されたカメラの視界内においても示され、対象ポイントの実世界でのロケーションが示される電子地形図を表示する。
【0026】
一般に地形図データを備える空間データは、緯度、経度及び高度または標高(Gx,y,zとして格納される)の形式である市販の地形図データであってもよく、かつ、クライアントユーザ端末110から遠隔で、関係機関、例えばランドヴィクトリア(Land Victoria)によりデータベース140内に保持されてもよい。データベース140内に格納されている空間データについての問合せは、ユーザによりクライアント端末110を介して開始される。ユーザは、グラフィックユーザインタフェース130上に提供されるカメラ視界機能及び制御装置を使用してカメラの視界を対象ポイント(以後、「POI」とも称する)へ方向を合わせる。空間データが、遠隔的にデータベース140内に保持されてもよいが、本データが、ユーザ端末110へCD−ROMまたは他の携帯式または非携帯式データ格納装置等の他の任意の便利な形で、局部的または遠隔的にアクセス可能にされてもよいことは認識される。
本発明のシステムは、カメラ視界のグラフィックユーザインタフェース上に提供される、例えばパン、チルト及びズームといったカメラ制御(以下、「“PTZ”コントロール」という)を使用し、システム並びに電子地形図への入力を制御する。本システムは、カメラのロケーション及びポジションに基づいて、向き及びチルトデータをカメラから抽出し、かつ、カメラの軌跡(図2において半径方向平面230として示されている)とトポグラフィ(the topography)または地形とが交差するポイントを確定するために、カメラと同じ向きまたは方位角に関するこのデータと標高データ(カメラのロケーションを示す三次元座標より既知である)を処理する。この交点は、好ましくは、電子地形図上へ表示するために緯度/経度/高度フォーマット(Lat/Long/Alt format)に形式を変える。
【0027】
ネットワーク内の他のカメラが、エラーの確認を提供し、かつ/または精度を向上させるために、単一のカメラ視界から取得されるデータと連携及び/又は単一のカメラ視界から取得されるデータを検証するために使用されてもよい。これは特に、低い可視状態において、かつ/または対象ポイントが遮られている場合に有益である。このような場合、対象ポイントに代わる、かつ最適なカメラ視界を識別するために、仮想三角測量は、複数の近接するカメラの重なり合う視界の間で編成され得る。
【0028】
単一のカメラ視界を使用して対象ポイントのポジションを確定するために、三次元座標(「タプル(tuple)」)のカメラロケーションは既知でなければならない。従って、固定式または可動式カメラのロケーションは、既知であり、かつ、カメラデータベースに(Cx,y,zの形で)格納される。動的ロケーションを有する可動式カメラの場合、即ち、移動する車両または航空機上に設置されるカメラの場合、カメラのロケーションに対応する座標は、GPSまたはこれに類似する手段等の位置決めシステムを使用して決定され、かつリアルタイムでサーバへ送信される。野外カメラは、真北方位角(方位角)に合わせて調整され、かつ半径方向の水平面に高さを合わせて置かれる。これを達成するために、野外カメラは、Calx,y,zの形で予め決められた、または既知の位置座標を有する既知の調査ポイントまたはランドマークを使用して調整される。
【0029】
要約すれば、本発明のシステムは、下記の異なる4つのモードで動作することができる。
1. ターゲットモード
動作−ユーザは、カメラ(PTZ)コントロールを採用して、対象ポイントがグラフィックユーザインタフェース上にスチルまたはビデオ画像として表示されるカメラ視界の略中心にくるまでカメラの方向を合わせる。次に、ユーザは、グラフィックユーザインタフェースを介して「ターゲット」プロセスを開始する。
結果−電子マーカ及び対象ポイントのロケーションに対応する座標(POIx,y,z)が電子地形図上に生成される。
2. ジオフェンスモード
動作−ユーザは、対象エリアを画定する多角形を形成するために最低3つの点を選択する。これは、ユーザがカメラ(PTZ)コントロールを採用し、対象エリアを画定する多角形の各点へとカメラの方向を合わせることを含んでもよく、かつ/または、ユーザは、一連のマウスクリックをマップ上で直に使用し、電子地形図上に対象エリアを画定する多角形を形成することもできる。対象エリアを画定することは、実際の対象ターゲットポイント(the actual target point)が真っ直ぐな視野方向からは分かりにくい場合に有益である。
結果−電子地形図上に強調表示された、または陰影付きの領域(多角形)が、多角形を画定する各点に対応する座標と共に生成される。
3. 逆ルックアップモード
動作−ユーザは、マップ上を直にクリックすることによって、電子地形図上で1つ以上のカメラ及び対象ポイントを選択する。
結果−電子地形図上に電子マーカが置かれ、かつ必要なカメラポジションが選択されたカメラへ自動的に送信されて、カメラの視界内に対象ポイントが現れるように1つ以上のカメラの方向を合わせる。次に、各カメラからのカメラ視界が、グラフィックユーザインタフェース上でユーザに表示される。
4. 仮想三角測量モード
動作−ユーザは、少なくとも1つのカメラ及び対象ポイントを選択し、システムは、1つ以上のカメラのうちが対象ポイントまでの最適な視野方向を与えるかを決定する。次に、最適な視野方向を有するカメラは、対象ポイントまたは領域へと方向づけられてもよい。
結果−ユーザに対象ポイントの最適な視界を提供する。最適なカメラ視界は、グラフィックユーザインタフェース上で識別され、オンスクリーンマーカ(a on scren marker)と共にユーザに表示される。さらに、重なり合うカメラの視界または電子地形図上で交差する軌跡である点が、計算され、かつVTx、y、zの形で表示され得る。
【0030】
以下、図2から図8までを参照して、上述のモードについてさらに詳しく説明する。
【0031】
まず、図2を参照すると、カメラの視界内に対象ポイントを観測できるように、カメラ210の位置を対象ポイント(POI)220へ向けて合わせる。次に、システムは、既知のカメラロケーション座標(Cx,y,z)を検索し、カメラポジションデータ(Cp,t,z)についてカメラに問い合わせる。カメラポジションデータ(Cp,t,z)は、システムがカメラ210と対象ポイント220との間に位置決めされる半径方向平面230またはカメラの軌跡(「斜辺」ともいう。)を決定できるように、カメラ210の向きまたは方位角及びチルトを提供ために使用される。
【0032】
カメラ210と対象ポイント220との間、および、カメラと同じ向きであるが地勢上(the terrain)または地形(the topography)上に位置決めされる既知の地形座標(known topographic coordinates)は、地形図データベース(the topographic map data)から検索される。これらの座標は、既知の座標(Gx,y,z)240を備える第1のデータセットを形成する。
【0033】
中間座標(IPOIx,y,z)250の第2のデータセットは、カメラと同じ向きで、また、カメラ210と対象ポイント220との間の半径方向平面230に沿って計算される。中間座標(IPOIx,y,z)は、半径方向平面230に沿って予め決められ、好ましくは一定の間隔で計算される。例えば、これらの間隔は、地形図データベースから入手可能な基本的な地形上の間隔(即ち、既知の座標(Gx,y,z)240の間の距離)に対応していてもよい。
【0034】
次に、図3を参照すると、コアプロセスまたはサブルーチンを使用して、第1及び第2のデータセット(即ち、検索される既知の座標(Gx,y,z)及び計算される中間座標(IPOIx,y,z)及び具体的には標高データ(IPOIz及びGz))が計算され、かつ比較される。サブルーチンは、ステップ310においてカメラポジションデータ(Cp,t,z)に基づいて、半径方向平面230の勾配を計算することと、ステップ320において処理されるべき最大距離(d)(図2参照)を画定することを含む。カメラと同じカメラの向きに位置決めされる既知の座標ポジション(Gx,y,z)は、ステップ330で地形図データベースから検索される。
【0035】
ステップ340では、既知の各座標セット(Gx,y,z)について、原点(即ち、カメラ位置Cx,y,z)からの距離(d)が計算され、かつ、半径方向平面の勾配を使用して、同一のGx、yロケーションにおける中間座標(IPOIz)の理論上の標高が計算される。半径方向平面と同じカメラの向きに沿った全ての点のx、yポジションが容易に推定される(即ち、Gx、yとIPOIx、yとが一致する)ことが与えられるとすれば、本発明の目的にとって、特別な関心事は、z座標または標高値である。その結果、ステップ350において、比較は本質的に、既知の標高値(Gz)と、各x、yポジションについて計算された理論上の標高値(IPOIz)との比較に縮尺される。一致(即ち、Gz=IPOIz)が生じると、実際の対象ポイント(POI)のx、y、z座標が特定されている。これは、半径方向平面(またはカメラの軌跡)が地勢または地形と交差する点である。次に、このx、y、z座標は、ステップ360において、システムにより実際のPOIx、y、z座標として記録され、格納される。
【0036】
「ヒット」及び「ニアミス」のしきい値は、一致が記録されるように予め定義されてもよい。一致を構成することに関してGzとIPOIzとの差が正確にゼロである必要はない。「ヒット」のしきい値内での一致は、一致として記録される。非一致は、「ニアミス」として記録される。
【0037】
次に、図4を参照すると、「ターゲット」モードにおいて、対象ポイントのポジションを近似する方法を描いたフローチャートが示されている。ステップ410において、対象ポイントは、カメラの視界内で対象ポイントを観察できるようにカメラを位置合わせすることによって選択される。
【0038】
対象ポイントがカメラの視界内に位置決めされると、ユーザは、ステップ420において、グラフィックユーザインタフェースを介して「ターゲット」モードにおける近似プロセスを開始する。次にシステムは、ステップ430において、既知のカメラロケーション座標(Cx,y,z)を検索し、かつ、ステップ440において、カメラポジションデータ(Cp,t,z)についてカメラに問い合わせる。ステップ450では、カメラポジションデータ(Cp,t,z)が度数に変換され、かつ、キャリブレーション補正の適用によりカメラの向きまたは方位角及びチルトが提供される。
【0039】
次にシステムは、ステップ460において、図3を参照して述べたコアプロセスを実行し、第1及び第2のデータセットが計算され、かつ、比較される。ステップ470において、コアプロセスが「ヒット」、即ち、GzとIPOIzとの差がゼロ、または、「ヒット」を画定する予め決められたしきい値内という一致を返せば、ステップ480において、住所または他の空間データ等の任意の関連データについて地形データベースは問い合わされ、かつ、ステップ480において、システムによりx、y、z座標が実際のPOI座標(POIx,y,z)として記録され、かつ、格納される。
【0040】
次に、図5を参照すると、ステップ510において、実際の対象ポイントの座標POIx、y、zの近似は、カメラ位置Czと対象ポイントPOIzとの高度差または標高差を使用して、半径方向平面(即ち、「斜辺」)の長さ(l)及びカメラと対象ポイントとの間の隣接する水平距離(d)を計算することにより検証され得る(図2も参照)。これらの変数は、カメラのチルトを確認し、かつ、任意の偏差が許容の公差内にあることを決定するために使用される。データは、他の三角法による確認が、さらにデータを検証するために使用されてもよい。
【0041】
次に、図6を参照すると、ユーザが(対象ポイントまたは他の目標物を囲む場合のある)対象エリアを選択すれば、対象エリアのロケーションの近似は、システムを「ジオフェンス」モードで動作させることによって達成され得る。対象エリアは、ユーザが、対象ポイントを囲む、または、単に一般的な対象領域を画定できる多角形を画定する最低3つの点を選択することによって選択される。ステップ610において、多角形を画定する複数の点は、図4を参照して述べたカメラ視界機能を使用し、かつ/または電子地形図上でのマウスクリックを介して、ユーザにより選択されてもよい。ステップ620において、ユーザは、グラフィックユーザインタフェースを介して「ジオフェンス」モードにおけるプロセスを開始する。
【0042】
ユーザが、電子地形図上での一連のマウスクリックを介して多角形を画定する複数の点のうちの1つまたは1つ以上を選択すれば、各マウスクリックは、対象エリアを画定する各点に対応する既知の座標(Gx,y,z)について問い合わされる地形図データベースを生じる。
【0043】
多角形の一部を形成する点をマークするようにカメラの方向を合わせることによって画定される、対象エリアを画定する多角形の任意の1つ以上の点について、システムは、ステップ630において、カメラロケーションデータ(Cx,y,z)を検索し、かつ、ステップ640において、カメラに、対応するカメラポジションまたはオフセットデータ(Cp,t,z)に関する問合せを行う。ステップ650では、カメラポジションデータ(Cp,t,z)が度数に変換され、かつ、キャリブレーション補正の適用によりカメラの向き及びチルトが提供される。
【0044】
次にシステムは、ステップ660において、図3を参照して述べたコアプロセスを実行し、多角形を画定する第1の点に対応する第1及び第2のデータセットが計算され、かつ、比較される。ステップ670では、第1及び第2のデータセット(即ち、検索される既知の座標Gx、y、z及び計算される中間座標IPOIx、y、z)が比較される。一致すると、多角形を画定する第1の点のx、y、z座標が画定され(即ち、POIx,y,z)、かつ、マーカが電子地形図上に置かれる。これらのステップは、多角形を画定する残りの各点について反復される。次に、完成された多角形は、グラフィックユーザインタフェース上に設けられる電子地形図上で陰影をつけられた、或いは他に強調表示されたエリアとしてユーザに表示される。
【0045】
次に、図7を参照すると、「逆ルックアップ」モードは、ユーザが、ステップ710において「逆ルックアップ」セッションに加わるように選択される1つ以上のカメラを生じ、ステップ720において、ユーザにより選択されている対象ポイントへと向けさせることを可能にする。対象ポイントは、点を選択するマウスを使用して選択される。或いは、ポイントは、物理アドレス(例えば、住所)を入力することによって選択されてもよい。次に、システムは、ステップ730において、地形図データベースから対象ポイントのロケーションに対応する既知の座標を検索する(即ち、Gx,y,z=POIx,y,z)。
【0046】
ステップ740では、「逆ルックアップ」セッションに加わる各カメラについて、システムは、選択されたカメラのカメラロケーションデータ(Cx,y,z)及び現在のカメラポジションデータ(Cp,t,z)を検索する。ステップ750において、既知の対象ポイント座標(POIx,y,z)及びカメラロケーション(Cx,y,z)を使用して、システムは、必要なカメラポジション、即ち対象ポイントへカメラの方向を合わせるために必要なカメラの向き及びカメラのチルトを計算する。ステップ760では、必要なカメラポジションが、カメラをその現在のポジションから対象ポイントへ向かって移動させるためにカメラへ送信される。
【0047】
次に、図8を参照すると、対象ポイントの最良の視野方向に基づいて、ユーザに最適なカメラ視界を提供するために、「仮想三角測量」モードが使用される。ステップ810において、ユーザは主要なカメラを選択し、「仮想三角測量」モードを開始する。ステップ820では、ユーザによって対象ポイントが選択される。
【0048】
ステップ830において、システムは、地形図データベースに問い合わせ、地形図データベースから対象ポイントに対応する既知の座標(即ち、Gx,y,z=POIx,y,z)を検索する。次には、システムは、カメラデータベースに問い合わせ、どのカメラが対象ポイントに最も近いかを決定する、或いは、ユーザが仮想三角測量セッションに加わる主要なカメラに近接する1つ以上のカメラを手動で選択していてもよい。ユーザが選択する場合、または、システムが選択する場合の近接したカメラは、カメラ候補リストにおいて、仮想三角測量参与カメラとしてタグ付けされる。
【0049】
ステップ840では、各関与しているカメラ毎に、システムは、既知のカメラポジション(Cx,y,z)及び検索された既知の対象ポイント座標(POIx,y,z)(即ち、ステップ830で取得されたもの)を使用し、必要なカメラポジションを計算し、かつ、図3を参照して述べた理論上のコアプロセスを処理して、第1及び第2のデータセットを計算し、かつ、比較する。ステップ860において、システムは、カメラ候補リストの先頭が最も近い結果を与えるカメラとなるように、コアプロセスにより生成される「ヒット」とPOIx,y,z(ステップ830においてGx,y,z形式で取得される)との距離に基づいて、カメラ候補リストを分類する。ステップ870において、システムは、カメラ候補リストの先頭におけるカメラを対象ポイントへ向きを合わせるために必要なカメラポジションを計算する。ステップ880では、カメラをその現在のポジションから対象ポイントへ向きを合わせるために、必要なカメラポジションがカメラへ送信される。
【0050】
「ヒット」結果とPOIx,y,z(ステップ830で取得された)との間に一致が生じると、カメラは対象ポイントへの「明瞭な視野方向」を有するものとされる。対象ポイントへの明瞭な視界が、近接する2つ以上のカメラから入手可能である場合は、対象ポイントの最も近くに位置決めされるカメラが、対象ポイントのロケーションを観測するために選択されてもよい。
【0051】
任意に、システムが仮想三角測量モードで動作する間、電子地形図上に各カメラと対象ポイントとの間の軌跡線(trace lines)(カメラの向きまたは方位角を表わす)が与えられてもよい。これらの軌跡線は、システムにより決定される対象ポイントの座標に関してさらなる確認を実行できるようにする視覚的ガイドをユーザに提供する。この場合、対象ポイントは、軌跡線の交点に位置決めされるべきである。また、システムは、2つ以上のカメラからの軌跡線または軌跡の交点に基づいて、POIx,y,zを計算し、かつ、表示する伝統的な三角測量機能も提供する。
【0052】
次に、図9を参照すると、システムは、カメラの北オフセットを確立し、かつ、野外での各カメラの取り付けの不完全性またはカメラの水平の位置合わせに影響を与える場合がある他の任意の不完全性を補償するように意図された双方向性のキャリブレーション機能を組み込んでいる。その目的は、野外または領域内の全てのカメラを真北へと調整させ、かつ、水平の半径方向平面上で同じ高さに配置させることにある。
【0053】
既知のランドマークまたはキャリブレーションポイントのロケーションに対応する緯度/経度/高度データは、システムのデータベースにCal1x、y、z、Cal2x、y、z、他のフォーマットで入力される。各カメラは、関連する最低2つのキャリブレーションポイントを必要とし、かつ、カメラがこれらのランドマークを見るように方向を合わせる際の対応するカメラポジションがデータベースに格納される。
【0054】
キャリブレーションプロセス(The calibration process)は、ステップ910において、まずシステムがキャリブレーションポイントCal1を見るようにカメラの方向を合わせることを含む。次に、ステップ920において、ユーザは(PTZコントロールを使用して)、カメラの視界が、キャリブレーションポイントCal1を構成するランドマークを完全に獲得し、かつ、このランドマーク上に中心となることを確認するために必要とされる僅かな調整を行うように促される。カメラがCal1に真っ直ぐに向いていることをユーザが確認すると、ステップ930において、カメラはカメラポジションデータ(Cp,t,z)について問い合わされる。
【0055】
次に、ステップ940において、カメラはキャリブレーションポイントCal2を見るように方向を合わせる。次に、ステップ950において、ユーザは(PTZコントロールを使用して)、カメラの視界が、キャリブレーションポイントCal2を構成するランドマークを完全に獲得し、かつ、このランドマーク上に中心
となることを確認するために必要とされる僅かな調整を行うように促される。カメラがCal2に真っ直ぐに向いていることをユーザが確認すると、ステップ960において、カメラはカメラポジションデータ(Cp,t,z)について問い合わされる。
【0056】
次に、ステップ970において、カメラの北オフセットが計算される。キャリブレーションプロセスは、カメラロケーション(Cx,y,z)及び少なくとも1つの既知のキャリブレーションポイントのロケーション(例えば、Cal1x,y,z及び/またはCal2x,y,z)を使用して、カメラとキャリブレーションポイントとの間のグリッド方位を確定する。システムは、(a)カメラのロケーションとキャリブレーションポイントとの間の前方方位角と、(b)カメラがキャリブレーションポイントへ方向を合わせられる際のカメラのパン値との差を計算する。これが、カメラの北オフセットを確定する。好ましくは、北オフセットを確定するために2つ以上のキャリブレーションポイントが使用され、かつ、結果が平均される。
【0057】
ステップ980では、カメラからキャリブレーションポイントまでの期待傾斜角と、キャリブレーションポイントを見るようにカメラが位置合わせされる際にカメラから報告される実際のピッチ/チルト角とを比較することにより、適用される必要があるチルト補償の必要な度合いが計算される。次に、システムは、期待傾斜度と、2つのキャリブレーションポイントにおいてカメラにより報告されるチルト角との差に基づいて、パン度当たりでどれだけのチルトを調整する必要があるかを決定する。適用される必要があるチルト補償がゼロに等しい半径方向平面内の2点が計算され、ゼロクロス点と称される。
【0058】
計算された結果は、ステップ990において、システムにより新しいキャリブレーションデータとして格納される。
【0059】
システム100は、ハードウェア、ソフトウェアまたはこれらの組合せを使用して実施されてもよく、かつ1つ以上のコンピュータシステムまたは処理システムにおいて実施されてもよい。具体的には、クライアントユーザ端末120及びそのグラフィックユーザインタフェース130並びにサーバ150の機能は、これまでに述べた機能を実行可能な1つ以上のコンピュータシステムによって提供されてもよい。
【0060】
このようなコンピュータシステムを図10に示す。この図において、例示的なコンピュータシステム1000は、プロセッサ1005等の1つ以上のプロセッサを備える。プロセッサ1005は、通信インフラストラクチャ1010へ接続される。コンピュータシステム1000は、グラフィクス、テキスト及び他のデータを通信インフラストラクチャ1010からディスプレイユニット1020へ供給するために転送するディスプレイインタフェース1015を備えてもよい。コンピュータシステム1000は、好ましくはランダムアクセスメモリであるメインメモリ1025を備えてもよく、また、補助メモリ1030を備えてもよい。
【0061】
補助メモリ1030は、例えば、ハードディスクドライブ1035、磁気テープドライブ、光ディスクドライブ等を備えてもよい。取外し可能な格納ドライブ1040は、着脱式格納ユニット1045との間で読取り及び/または書込みを周知の方法で行なう。取外し着脱式格納ユニット1045は、フロッピーディスク、磁気テープ、光ディスク等を表わす。
【0062】
認識されるように、着脱式格納ユニット1045は、プロセッサ1005に所望される機能を実行させる一連の指令の形でコンピュータソフトウェアを内蔵している使用可能な格納媒体であるコンピュータを備える。代替実施形態では、補助メモリ1030は、コンピュータプログラムまたは指令がコンピュータシステム1000に搭載され得るための他の類似手段を備えてもよい。このような手段には、例えば着脱式格納ユニット1050及びインタフェース1055が備えられてもよい。
【0063】
また、コンピュータシステム1000は、通信インタフェース1060を備えてもよい。通信インタフェース1060は、コンピュータシステム1000と外部装置との間でソフトウェア及びデータが転送されることを可能にする。通信インタフェース1060の例には、モデム、ネットワークインタフェース、通信ポート、PCMCIAスロット及びカード等が備えられてもよい。通信インタフェース1060を介して転送されるソフトウェア及びデータは、通信インタフェース1060によって受信され得る電磁信号、電子信号、光信号または他の信号であってもよい信号1065の形である。信号は、ワイヤまたはケーブル、光ファイバ、電話回線、携帯電話リンク、無線周波数または他の通信チャネル等の通信経路1070を介して通信インタフェース1060へ供給される。
【0064】
これまでに述べた実施形態では、本発明が主としてコンピュータソフトウェアを使用して実施されているが、他の実施形態において、本発明は、例えば特定用途向けの集積回路(ASIC)等のハードウェアコンポーネントを使用して、主としてハードウェア内に実装されてもよい。本明細書に記載されている機能を実行するためのハードウェア状態のマシンの実装は、当業者には明白である。他の実施形態では、本発明は、ハードウェア及びソフトウェアの双方の組合せを使用して実施されてもよい。
【0065】
野外における対象ポイントの座標近似は、他の機能によって補足されてもよい。例えば、対象ポイントのロケーションを近似するためのシステムが、火災のロケーションを近似するために使用される場合、システムはさらに、ネットワークを介してチーム(例えば、消防隊または地域社会)に火災のロケーションを電子的に知らせ、SMS、eメール、音声またはライブチャットまたは音声通信を発動し、並びに、例えば野外の消防隊または地域社会にその現在のロケーションに基づく対象ポイントへの、または対象ポイントからの方向性を送信して、システムにより生成されるナビゲーションデータに基づいて、野外の消防隊のためにルートを計算するための手段を備えてもよい。他の空間データ、気象、衛星画像またはデータ、雷検出は、システムへの入力として使用され得る。
【0066】
本発明のシステムは、マッピングまたは三角測量プロセスに関して特別な知識を持たない完全に未熟なユーザが、1台のカメラを使用して数秒でこれらのプロセスを開始し、かつ、正確な結果に到達することを可能にする。
【0067】
本プロセスは、ロケーションを近似する精度及び速度を高める。これは、この演習を実行するのに必要とされる人的資源の数及び技能レベルを大幅に低減し、かつ、伝統的技術による処理時間を分単位(典型的には、15分から20分またはそれ以上)から数秒にまで短縮する。
【0068】
本発明を限られた数の実施形態に関連して説明したが、当業者には、これまでの説明に鑑みて多くの代替物、修正及び変形が可能であることが認識される。従って、本発明は、開示されている本発明の概念及び範囲内にあると思われるこのような全ての代替物、修正及び変形を包含するように意図されている。
【特許請求の範囲】
【請求項1】
三次元座標系に対する対象ポイントのロケーションを近似するための方法であって、
(a)前記対象ポイントがカメラの視界内に入るように、前記対象ポイントへカメラの方向を合わせるステップと、
(b)前記三次元座標系に対するカメラロケーションと、カメラの向き及びカメラのチルトを含むカメラポジションとを含むカメラデータを検索するステップと、
(c)関連の地形図データベースに問合せを行い、前記カメラの向きに沿って地形図上に位置決めされている1つ以上の座標を識別し、第1のデータセットを形成するステップと、
(d)前記カメラの向き及び前記カメラのチルトに基づいて、前記カメラと前記対象ポイントとの間の半径方向平面上に位置決めされている1つ以上の座標を計算し、第2のデータセットを形成するステップと、
(e)前記第1のデータセットと前記第2のデータセットとを比較し、一致する座標対を識別するステップとを含み、
前記一致する座標が、前記対象ポイントの前記三次元座標位置を表わす方法。
【請求項2】
カメラデータを検索する前記ステップが、前記カメラのチルト及びパン値に基づいて、前記対象ポイントに対応する前記カメラの向きを計算するステップを含む、請求項1に記載の方法。
【請求項3】
前記対象ポイントの前記三次元座標位置を検証できるように、前記カメラロケーションと前記対象ポイントとの間の高度または標高及び水平距離の差を決定するステップをさらに含む、請求項1または請求項2に記載の方法。
【請求項4】
前記カメラと前記対象ポイントとの間の半径方向平面上に位置決めされている1つ以上の座標が、前記半径方向平面に沿って所定の間隔で計算される、請求項1から請求項3のいずれか一項に記載の方法。
【請求項5】
前記所定の間隔が、利用可能な地形上の間隔と一致する、請求項4に記載の方法。
【請求項6】
前記対象ポイントを選択する前記ステップは、対象エリアを表わす多角形を画定する3つ以上の点を選択し、各点が前記多角形を画定するように前記カメラの方向を合わせることを含み、前記方法はさらに、ステップ(b)からステップ(e)までを繰り返して前記対象エリアを画定する各点のポジションを近似することを含む、請求項1から請求項5のいずれか一項に記載の方法。
【請求項7】
前記対象ポイントを選択する前記ステップは、前記電子地形図上で対象エリアを表わす多角形を画定する3つ以上の点を選択し、かつ、前記地形図データベースに問合せを行い、前記多角形を画定する各点に対応する地形図座標を検索することを含む、請求項1から請求項5のいずれか一項に記載の方法。
【請求項8】
内部に前記対象ポイントが位置決めされている多角形を画定する各点の前記三次元座標位置を検証できるように、前記カメラロケーションと前記多角形を画定する各点との間の高度または標高及び水平距離の差を決定するステップをさらに含む、請求項6または請求項7に記載の方法。
【請求項9】
前記対象ポイントまたは内部に前記対象ポイントが位置決めされている多角形を画定する3つ以上の点に対応する三次元座標を識別する地形図をユーザに示すステップをさらに含む、請求項6、請求項7または請求項8のいずれか一項に記載の方法。
【請求項10】
三次元座標系内に位置決めされている対象ポイントへカメラの方向を合わせるための方法であって、前記対象ポイントが地形図のグラフィックユーザインタフェース上でユーザによって選択され、
(a)地形図データベースから前記対象ポイントの三次元座標位置を検索するステップと、
(b)前記三次元座標系に対するロケーションを含むカメラデータと、カメラの向き及びカメラのチルトを含む初期のカメラポジションとを検索するステップと、
(c)前記三次元座標系に対する前記カメラロケーションを使用し、必要なカメラの向き及び必要なカメラのチルトを含む必要なカメラポジションを決定するステップであって、前記対象ポイントがカメラの視界内に入るステップと、
(d)前記初期のカメラポジションから前記必要なカメラポジションへ前記カメラを移動させるために、前記必要なカメラの向き及び前記必要なカメラのチルトを前記カメラへ送信するステップとを含む方法。
【請求項11】
三次元座標系内に位置決めされている対象ポイントの最適な視界を与えるカメラを識別する方法であって、前記対象ポイントが電子地形図上でユーザによって選択され、
(a)地形図データベースから、前記三次元座標系に対する前記対象ポイントの実際のロケーションを検索するステップと、
(b)前記対象ポイントに近接して位置決めされている1つ以上のカメラを識別するステップと、
(c)近接する各カメラについて、前記三次元座標系に対するカメラロケーションを検索するステップと、
(d)前記地形図データベースに問合せを行い、前記カメラと前記対象ポイントとの間のカメラの向きに沿って前記地形図上に位置決めされている、地形標高値を含む座標を検索するステップと、
(e)近接する各カメラについて、前記カメラと前記対象ポイントとの間の半径方向平面に沿って位置決めされている、理論上の標高値を含む一連の理論座標を計算するステップと、
(f)前記地形標高値を前記理論上の標高値と比較するステップであって、
前記対象ポイントの明瞭な視界は、理論上の標高値が地形標高値以上の場合にのみ前記カメラから入手可能であるステップと、
(g)近接する各カメラについてステップ(d)からステップ(f)までを繰り返し、近接するカメラのうちで前記対象ポイントの明瞭な視界を入手できるカメラを識別するステップとを含む方法。
【請求項12】
前記方法はさらに、対象ポイントの最適な視界を与えるカメラの向き及びカメラのチルトを含むカメラポジションを計算するステップと、前記必要なカメラポジションを前記カメラへ送信し、前記カメラを初期のカメラポジションから必要なカメラポジションへ移動させるステップとを含み、
前記対象ポイントが、前記カメラのカメラ視界内にある、請求項11に記載の方法。
【請求項13】
前記対象ポイントへの明瞭な視界は、近接する2つ以上のカメラから入手可能であれば、前記対象ポイントの最も近くに位置決めされているカメラが前記対象ポイントのロケーションを入れるために選択される、請求項11または請求項12に記載の方法。
【請求項14】
前記対象ポイントへの明瞭な視界が、近接するカメラから入手できなければ、前記対象ポイントに最も近い代替ポイントへ明瞭な視界を与えるカメラが選択される、請求項11または請求項12に記載の方法。
【請求項15】
前記カメラが、前記座標系関して固定されたロケーションを有する、請求項1から請求項14のいずれか一項に記載の方法。
【請求項16】
三次元座標系に対する対象ポイントのロケーションを近似するためのシステムであって、
(a)ユーザが前記対象ポイントをカメラの視界内で見ることができるように、前記対象ポイントへ方向を合わせるカメラと、
(b)前記三次元座標系に対するカメラのロケーションとカメラの向き及びカメラのチルトを含むカメラポジションとを含むカメラデータを格納するための第1のデータベースと、
(c)地形図データを格納するための第2のデータベースと、
(d)前記カメラの向きに沿って前記地形図上に位置決めされる1つ以上の座標を識別し、第1のデータセットを形成するため、および、前記カメラの向き及び前記カメラのチルトに基づいて、前記カメラと前記対象ポイントとの間の半径方向平面上に位置決めされる1つ以上の座標を計算し、第2のデータセットを形成するためのプロセッサとを含み、
前記第1のデータセットと前記第2のデータセットとの比較が、前記対象ポイントの前記三次元座標位置を表わす一致する座標対を識別するシステム。
【請求項17】
前記対象ポイントに対応する前記三次元座標のロケーションがユーザに示される地形図インタフェースをさらに含む、請求項16に記載のシステム。
【請求項18】
三次元座標系に対する対象ポイントのロケーションを近似するためのシステムであって、
前記システムが、プロセッサと、請求項1から請求項15のいずれか一項に記載の方法を前記プロセッサに実行させる一連の指令を格納するための関連のメモリデバイスとを備えるシステム。
【請求項19】
三次元座標系に対する対象ポイントのロケーションを近似するためのシステムにおいて使用するためのコンピュータソフトウェアであって、
前記システムが、プロセッサと、請求項1から請求項15のいずれか一項に記載の方法を前記プロセッサに実行させる一連の指令を含むコンピュータソフトウェアを格納するための関連のメモリデバイスとを備えるコンピュータソフトウェア。
【請求項20】
略諸図面に示された任意の一実施形態を参照してこれまでに記述されている、三次元座標系に対する対象ポイントのロケーションを近似するための方法。
【請求項1】
三次元座標系に対する対象ポイントのロケーションを近似するための方法であって、
(a)前記対象ポイントがカメラの視界内に入るように、前記対象ポイントへカメラの方向を合わせるステップと、
(b)前記三次元座標系に対するカメラロケーションと、カメラの向き及びカメラのチルトを含むカメラポジションとを含むカメラデータを検索するステップと、
(c)関連の地形図データベースに問合せを行い、前記カメラの向きに沿って地形図上に位置決めされている1つ以上の座標を識別し、第1のデータセットを形成するステップと、
(d)前記カメラの向き及び前記カメラのチルトに基づいて、前記カメラと前記対象ポイントとの間の半径方向平面上に位置決めされている1つ以上の座標を計算し、第2のデータセットを形成するステップと、
(e)前記第1のデータセットと前記第2のデータセットとを比較し、一致する座標対を識別するステップとを含み、
前記一致する座標が、前記対象ポイントの前記三次元座標位置を表わす方法。
【請求項2】
カメラデータを検索する前記ステップが、前記カメラのチルト及びパン値に基づいて、前記対象ポイントに対応する前記カメラの向きを計算するステップを含む、請求項1に記載の方法。
【請求項3】
前記対象ポイントの前記三次元座標位置を検証できるように、前記カメラロケーションと前記対象ポイントとの間の高度または標高及び水平距離の差を決定するステップをさらに含む、請求項1または請求項2に記載の方法。
【請求項4】
前記カメラと前記対象ポイントとの間の半径方向平面上に位置決めされている1つ以上の座標が、前記半径方向平面に沿って所定の間隔で計算される、請求項1から請求項3のいずれか一項に記載の方法。
【請求項5】
前記所定の間隔が、利用可能な地形上の間隔と一致する、請求項4に記載の方法。
【請求項6】
前記対象ポイントを選択する前記ステップは、対象エリアを表わす多角形を画定する3つ以上の点を選択し、各点が前記多角形を画定するように前記カメラの方向を合わせることを含み、前記方法はさらに、ステップ(b)からステップ(e)までを繰り返して前記対象エリアを画定する各点のポジションを近似することを含む、請求項1から請求項5のいずれか一項に記載の方法。
【請求項7】
前記対象ポイントを選択する前記ステップは、前記電子地形図上で対象エリアを表わす多角形を画定する3つ以上の点を選択し、かつ、前記地形図データベースに問合せを行い、前記多角形を画定する各点に対応する地形図座標を検索することを含む、請求項1から請求項5のいずれか一項に記載の方法。
【請求項8】
内部に前記対象ポイントが位置決めされている多角形を画定する各点の前記三次元座標位置を検証できるように、前記カメラロケーションと前記多角形を画定する各点との間の高度または標高及び水平距離の差を決定するステップをさらに含む、請求項6または請求項7に記載の方法。
【請求項9】
前記対象ポイントまたは内部に前記対象ポイントが位置決めされている多角形を画定する3つ以上の点に対応する三次元座標を識別する地形図をユーザに示すステップをさらに含む、請求項6、請求項7または請求項8のいずれか一項に記載の方法。
【請求項10】
三次元座標系内に位置決めされている対象ポイントへカメラの方向を合わせるための方法であって、前記対象ポイントが地形図のグラフィックユーザインタフェース上でユーザによって選択され、
(a)地形図データベースから前記対象ポイントの三次元座標位置を検索するステップと、
(b)前記三次元座標系に対するロケーションを含むカメラデータと、カメラの向き及びカメラのチルトを含む初期のカメラポジションとを検索するステップと、
(c)前記三次元座標系に対する前記カメラロケーションを使用し、必要なカメラの向き及び必要なカメラのチルトを含む必要なカメラポジションを決定するステップであって、前記対象ポイントがカメラの視界内に入るステップと、
(d)前記初期のカメラポジションから前記必要なカメラポジションへ前記カメラを移動させるために、前記必要なカメラの向き及び前記必要なカメラのチルトを前記カメラへ送信するステップとを含む方法。
【請求項11】
三次元座標系内に位置決めされている対象ポイントの最適な視界を与えるカメラを識別する方法であって、前記対象ポイントが電子地形図上でユーザによって選択され、
(a)地形図データベースから、前記三次元座標系に対する前記対象ポイントの実際のロケーションを検索するステップと、
(b)前記対象ポイントに近接して位置決めされている1つ以上のカメラを識別するステップと、
(c)近接する各カメラについて、前記三次元座標系に対するカメラロケーションを検索するステップと、
(d)前記地形図データベースに問合せを行い、前記カメラと前記対象ポイントとの間のカメラの向きに沿って前記地形図上に位置決めされている、地形標高値を含む座標を検索するステップと、
(e)近接する各カメラについて、前記カメラと前記対象ポイントとの間の半径方向平面に沿って位置決めされている、理論上の標高値を含む一連の理論座標を計算するステップと、
(f)前記地形標高値を前記理論上の標高値と比較するステップであって、
前記対象ポイントの明瞭な視界は、理論上の標高値が地形標高値以上の場合にのみ前記カメラから入手可能であるステップと、
(g)近接する各カメラについてステップ(d)からステップ(f)までを繰り返し、近接するカメラのうちで前記対象ポイントの明瞭な視界を入手できるカメラを識別するステップとを含む方法。
【請求項12】
前記方法はさらに、対象ポイントの最適な視界を与えるカメラの向き及びカメラのチルトを含むカメラポジションを計算するステップと、前記必要なカメラポジションを前記カメラへ送信し、前記カメラを初期のカメラポジションから必要なカメラポジションへ移動させるステップとを含み、
前記対象ポイントが、前記カメラのカメラ視界内にある、請求項11に記載の方法。
【請求項13】
前記対象ポイントへの明瞭な視界は、近接する2つ以上のカメラから入手可能であれば、前記対象ポイントの最も近くに位置決めされているカメラが前記対象ポイントのロケーションを入れるために選択される、請求項11または請求項12に記載の方法。
【請求項14】
前記対象ポイントへの明瞭な視界が、近接するカメラから入手できなければ、前記対象ポイントに最も近い代替ポイントへ明瞭な視界を与えるカメラが選択される、請求項11または請求項12に記載の方法。
【請求項15】
前記カメラが、前記座標系関して固定されたロケーションを有する、請求項1から請求項14のいずれか一項に記載の方法。
【請求項16】
三次元座標系に対する対象ポイントのロケーションを近似するためのシステムであって、
(a)ユーザが前記対象ポイントをカメラの視界内で見ることができるように、前記対象ポイントへ方向を合わせるカメラと、
(b)前記三次元座標系に対するカメラのロケーションとカメラの向き及びカメラのチルトを含むカメラポジションとを含むカメラデータを格納するための第1のデータベースと、
(c)地形図データを格納するための第2のデータベースと、
(d)前記カメラの向きに沿って前記地形図上に位置決めされる1つ以上の座標を識別し、第1のデータセットを形成するため、および、前記カメラの向き及び前記カメラのチルトに基づいて、前記カメラと前記対象ポイントとの間の半径方向平面上に位置決めされる1つ以上の座標を計算し、第2のデータセットを形成するためのプロセッサとを含み、
前記第1のデータセットと前記第2のデータセットとの比較が、前記対象ポイントの前記三次元座標位置を表わす一致する座標対を識別するシステム。
【請求項17】
前記対象ポイントに対応する前記三次元座標のロケーションがユーザに示される地形図インタフェースをさらに含む、請求項16に記載のシステム。
【請求項18】
三次元座標系に対する対象ポイントのロケーションを近似するためのシステムであって、
前記システムが、プロセッサと、請求項1から請求項15のいずれか一項に記載の方法を前記プロセッサに実行させる一連の指令を格納するための関連のメモリデバイスとを備えるシステム。
【請求項19】
三次元座標系に対する対象ポイントのロケーションを近似するためのシステムにおいて使用するためのコンピュータソフトウェアであって、
前記システムが、プロセッサと、請求項1から請求項15のいずれか一項に記載の方法を前記プロセッサに実行させる一連の指令を含むコンピュータソフトウェアを格納するための関連のメモリデバイスとを備えるコンピュータソフトウェア。
【請求項20】
略諸図面に示された任意の一実施形態を参照してこれまでに記述されている、三次元座標系に対する対象ポイントのロケーションを近似するための方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公表番号】特表2011−525968(P2011−525968A)
【公表日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願番号】特願2011−513819(P2011−513819)
【出願日】平成21年6月16日(2009.6.16)
【国際出願番号】PCT/AU2009/000769
【国際公開番号】WO2009/152567
【国際公開日】平成21年12月23日(2009.12.23)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
【出願人】(510330286)アイファイ アール アンド ディー ピーティーワイ リミテッド (1)
【Fターム(参考)】
【公表日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願日】平成21年6月16日(2009.6.16)
【国際出願番号】PCT/AU2009/000769
【国際公開番号】WO2009/152567
【国際公開日】平成21年12月23日(2009.12.23)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
【出願人】(510330286)アイファイ アール アンド ディー ピーティーワイ リミテッド (1)
【Fターム(参考)】
[ Back to top ]