
空間周波数フィルタリング方法および画像取込装置
本発明は、感光画素(111、112、113、・・・、211、212、213、・・・)を備える1つまたは複数の光電画像センサ(100;200;41、42)上に取り込み画像を投射するレンズ(10)を有する画像装置(3)において空間周波数フィルタリングする方法に関し、少なくとも1つの光電画像センサ(100;200;41、42)と、イメージング中にこの画像センサ上に投射される画像とは画素平面内で相互に移動でき、この相対移動の位置ベクトルはそれぞれ所定の期間において所定の位置を取る。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、独立請求項の前文に定義されるとおり、空間周波数フィルタリング方法および画像取込装置に関する。
【背景技術】
【0002】
以下の説明では、基本的にはフィルムカメラが参照されるが、本発明はこれらに限定されない。本発明による方法は、例えば写真カメラまたは他の画像取込装置にも同等に適用できることが理解される。
【0003】
可能な限り自然のままの、アーチファクトがない画像を取り込み可能にするために、通常の画素配置を有するデジタル光電画像センサを有するカメラは、光学的プレフィルタリング、すなわち空間周波数フィルタリングの機能を装備している。エイリアシング効果を回避する必要がある場合、デジタル画像センサにおいて光学的プレフィルタリングが原理的に要求される。いわゆるエイリアス構造体は、例えば、データのデジタルフィルタリングにより後の段階で画素から除去することが不可能である。この理由は、デジタルデータはエイリアス構造体と画像内のシーンを形成する構造体との間で何らかの区別をなさないためである。
【0004】
理論的背景はナイキスト−シャノンのサンプリング定理に関連して知られている。ナイキスト周波数は標本化周波数の半分で与えられる。
【0005】
したがって、光学的プレフィルタリング、すなわち空間周波数フィルタリングは、対物レンズにより画像センサ上に投射される取り込みシーンの画像内のすべてのエイリアス構造体(同一スペクトル感度の2つの隣接する画素間の距離より小さいまたは細かい)を可能な限り完全に抑制圧しなければならず、また可能な限り、これより大きいすべての構造体を抑制してはならない。これは技術的には不可能であり、この理由のため、エイリアスアーチファクトの抑制と、可能な限り高い画像鮮鋭度との間で常に妥協がなされなければならない。
【0006】
画像センサの理論上の理想的な画素の光感度は、画素の中心からの距離が増加すると減少しなければならないが、この場合、隣接画素上の点も同様に範囲に含まれる。対応する方向依存性曲線は、実際のセンサ画素の光感度による位置依存性曲線と、センサ画素の相互の幾何学的な配置との両方に依存し、また高い画像鮮鋭度とエイリアスアーチファクトの高い抑制度との間の所望の妥協点に依存する。理想的な光学的プレフィルタリングは、画素が可能な限り理想的と考えられる画素の光感度曲線を有するように、実際のセンサ画素上に画像の光を分散しなければならない。
【0007】
従来技術ではこれを達成する様々な方法が存在する。画像に関連するセンサ画素の光感度曲線が、対物レンズの不鮮明度または不鮮鋭度により単独で変更されるデジタル画像取込装置が存在する。しかし、所望の曲線はすべての状況においてこの方法では達成されないため、特別に設計された光学フィルタが一般に使用される。この方法では、センサ画素の前面に配置される散乱ディスクが使用され、この散乱ディスクが全方向に入射光を拡大することにより、画素は画像のより広い領域を記録する。しかし、フィルタリングに対して要求される方向への依存性は、この方法では達成できない。このことから、水晶における複屈折原理に基づくフィルタが特に使用される。入射光はフィルタによって、例えば、2つまたは4つの発生光線に分割され、これにより方向依存性フィルタリングが達成され、本質的に通常の画素配置に対するより優れた結果を与える。この種の方法は特許文献1に開示されている。
【0008】
特許文献2では、対物レンズと画像センサとの間の距離を変更することによりモアレパターンの発生を検出できる、画像取込装置が開示されている。モアレ効果の厳密性は次に、対物レンズを移動することによりすなわち画像の焦点外れを起こすことにより、所望のしきい値レベルより下に低減される。
【0009】
しかし、所望の位置依存性フィルタ曲線はこれらの方法では達成できない。
【0010】
任意の光学的プレフィルタリングの有効性を増加する1つの可能な方法は、所望の解像度より高い解像度(結果)を与える画像センサを使用することである。フィルタリング性能は、画素ラスタの細かさ、すなわち周波数とその結果のラスタとの間の割合によって向上する。しかし、この解決策はより低い光感度をもたらす結果になる。この理由は、多数の画素を有するセンサにおいては、センサ上で必要とされる引き込み導体に起因してピクセル当たりの有効感光面積が減少することと、これら引き込み導体が必要とするピクセル当たりの面積のサイズが同じに留まることとによる。さらに、この解決策はまた、データ処理の必要量を増加させる結果になり、これに関連して、エネルギー消費がより大きい高性能電子回路を使用する必要性をもたらす結果になる。
【0011】
既知の光学的プレフィルタリング構成の別の欠点は、フィルタ曲線の形状または特性が固定されて事前設定され、変更できないという事実にある。他方では、フィルタリングの特性を状況に合うように適応できる利点がある。人物写真では、例えばエイリアスアーチファクトを厳密に抑制する必要があるが、焦点または鮮鋭度に対する要求はあまり厳しくない。これに対して、風景写真のような多くの細部および少数しかない規則的な構造体が存在する中距離−長距離ショットでは、一般に、少数のエイリアスアーチファクトが発生するだけであり、可能な最高鮮鋭度が主として考慮される。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】日本特許第10229525A号明細書
【特許文献2】米国特許第5915047A号明細書
【発明の概要】
【発明が解決しようとする課題】
【0013】
したがって存在する目的は、改善された光学的プレフィルタリングすなわち空間周波数フィルタリングを提供することである。
【課題を解決するための手段】
【0014】
本発明によれば、空間周波数フィルタリング方法および画像取込装置は独立請求項の特徴を備えて提示される。
【0015】
以下に与えられる説明の詳細および利点は、明確に否定して記述されない限り、本発明によるすべての解決策に関係する。本発明に係る画像取込装置は、記載のステップを実行するための適切な手段を備える。
【0016】
感光画素を有する1つまたは複数のデジタル光電画像センサ上に取込画像を投射する対物レンズを有する画像取込装置における、空間周波数フィルタリング方法が提案される。画像を取り込み中、少なくとも1つの光電画像センサおよびこのセンサ上に対物レンズによりこれに投射される画像は、具体的には制御可能または調節可能な方法で、画素の平面内で相互に移動される。これは実際には、画像を固定して維持する間に画像センサを移動することにより、または画像センサを固定して維持する間に画像を移動することにより、または2つの移動の組み合わせにより達成できる。いずれのオプションにも特定の利点が存在し、これらは後の段階で詳細に説明される。述べられているプロセスでは、相対移動の移動ベクトルは事前決定可能な占有の点(占有される点)を範囲に含み、占有の期間またはこれら占有される点のそれぞれの速度は事前に決定できる。このように、移動ベクトルは、移動を特徴付けるために使用される、移動の好ましくは閉じた軌道または経路を定義する。
【0017】
場合により、センサの各画素が画像に対して移動するか、または画像がセンサに対して移動し、これは、相対移動がない場合に比べて画像のより広い領域を検出することを意味する。速度がより遅いすなわち占有の期間がより長い場合の移動ベクトル上の点は、露光時間が増加する場所、したがってまたセンサ画素の相対光感度が画像内の対応点に対して増加する場所の点を構成する。
【0018】
占有の点(占有される点とも称される)、および速度または言い換えるとこれら点に関連する位置ベクトルの占有期間、ならびに実際の画素の幾何学的配置およびそれら画素の光感度に対する位置依存性曲線を適切に事前設定することにより、画像に関連するセンサ画素の位置依存性光感度に対する任意の所望の曲線を得ることができる。
【0019】
本発明の別の特定の利点は、軌道を可変的に形成できる能力にある。この方法により、以下に説明されるとおり、カメラの様々な撮影状況および動作モードに適合するように適応される、光学的プレフィルタリングを達成することが可能である。
【図面の簡単な説明】
【0020】
【図1a】本発明の実施形態による使用に対する第1画像センサの細部または切断図を示している。
【図1b】図1aに示されたセンサについてのセンサと画像との間の相対移動の軌道の実施形態を示している。
【図2a】本発明の実施形態において使用するための第2画像センサの細部を示している。
【図2b】図2aに示されたセンサについてのセンサと画像との間の相対移動の軌道の実施形態を示している。
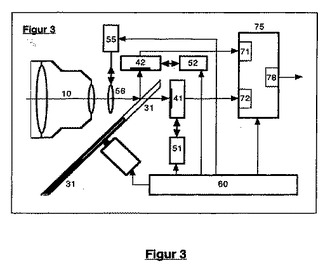
【図3】画像を2つの画像センサに分散するための回転ミラーホイールを有するミラーの実施形態を示している。
【発明を実施するための形態】
【0021】
有利な実施形態は従属請求項および以下の説明の主題を形成する。
【0022】
センサと画像との間の相対移動は、様々な方法、例えば電磁駆動要素またはピエゾ効果により作動する要素によって生じさせることができる。このようにして、画像センサまたは光学素子を低い製造コストで任意の所望の軌道に沿って可変速度で移動させることができる。
【0023】
説明を簡略化するために、以下では、センサまたはピクセルの軌道または移動が述べられる場合は、センサと画像との間の相対移動を常に意味する。この相対移動はまた、これがその場合ではないと明確に述べられていない限り、センサの前面に挿入される光学素子の移動により発生されてもよい。ここで参照される実現性は、例えば、デジタルカメラおよびフィルムカメラが装着される、従来の画像安定化機構を使用するものである。この種類の画像安定化機構は例えば日本特開2004−271694A号公報に示されている。このような機構では、光学素子、例えばセンサの前面に挿入されるレンズ、レンズまたはプリズム群は機械的に調節でき、具体的には、横方向に移動および/または旋回でき、これによりカメラの使用者側の振動または旋回運動を補償できる。これが意味することは、従来の画像安定機構によりセンサによって取り込まれる画像の部分を一定に維持できることである。適切に再プログラミングすることにより、この種の機構を用いてセンサに対する取込画像の相対移動を発生させることが可能である。
【0024】
本発明は原理的にすべての種類のデジタル画像センサにおいて使用できる。本発明のプレフィルタリングにおける軌道は必然的に常にセンサ画素のすべてに対して同一であるため、その結果異なるスペクトル光感度の画素を有するセンサが存在する場合、各種類の画素は好ましくは同一の静的、位置関連相対光感度およびセンサの領域内で同一の幾何学的位置を有し、したがってまた同一数の各種類の画素が存在しなければならない。
【0025】
上ですでに説明したとおり、軌道は、特に、画像に関連する画素の所望の位置関連の光感度曲線と、同一スペクトル感度の隣接画素の幾何学的配置と、画素の形状と、画素の上方にある任意の集光レンズとの関数として形成されなければならない。例えば、同一スペクトル感度の画素と隣接画素との間の距離が、垂直方向においてよりも水平方向において大きい場合、軌道の形状はこの非対称性を認めなければならない。所望通りに形成できる軌道の利点は、具体的には、軌道の特定の画素配置およびパラメータを取ることによって、任意の種類の画像センサに対して最適な方法で任意の所望の光学フィルタ曲線を得ることができる点である。
【0026】
軌道に対しては広範囲の様々な変形形態が考えられる。この方法では、例えば、多くの場合は、所望の位置関連光感度曲線の近似を達成するために、互いに異なる周波数および振幅の単純な円移動または正弦移動を相互に重畳した結果である軌道を単に使用することで十分である。正弦相対移動の一般形式は、具体的には、以下の式で表される。
【数1】
ただし、ω=2πfおよびf=1/Tであり、Tは画像取り込み時間である。
【0027】
技術手段および画素の物理的ならびに幾何学的特性により生成されるこの種の軌道上の占有される点と占有の期間との間の関係から、画像に関連する画素に対する位置依存性相対光感度プロファイルを導き出すことが可能であり、これにより、所望の光感度プロファイルとの比較を行うことにより優れた近似を生成する方法を評価することができる。
【0028】
移動により得られる画像に関連する画素の相対的光感度に対する位置関連曲線が露光時間に依存しないようにするには、センサまたは光学素子の移動が画像取り込みの露光時間と同期されることが有効である。これは、具体的には速度変化により達成されるため技術的に容易である。露光または画像取り込みの間、軌道はしたがって、整数回数(すなわち1回または1回より多い回数)、横断されなければならない。
【0029】
プレフィルタリングに対応するポストフィルタリングはデジタル的に実行されることが特に有効である。これは、様々な位置関連光感度プロファイルのそれぞれが、取り込まれる望ましいおよび望ましくない構造体を、特定の方法で、センサからの画像信号において生成するという理由から、有利である。後続の下流のデジタルフィルタリングの特性は、具体的には、その時点で動作する光学的プレフィルタ特性に対する画像処理電子技術により対応される場合に限り、結果としての最適画像が取得される。特定のデジタルポストフィルタリングに対して要求される特性は、光学的プレフィルタリングにおける所定の位置関連光感度プロファイルから計算できる。
【0030】
別の好ましい実施形態では、少なくとも2つの同一でない中間画像が取り込まれ、その後に処理されて結果の画像が得られる。中間画像は、例えば、好ましくは一列の画素ずつ移動された1つの画像センサにより、ショットの間に連続的に取り込まれる。同様に、中間画像は少なくとも2つの画像センサにより取り込まれてもよい。フルカラー画像が、例えば具体的にはBayerセンサまたはFOVEON X3画像センサにより取り込まれてもよく、または白黒画像または部分的なカラー画像が取り込まれてもよい。好ましくは、白黒中間画像は、1つの画像センサにより取り込まれるかまたは生成され、赤/青中間画像は別の画像センサにより取り込まれるかまたは生成される。少なくとも2つの同一ではないフルカラー、部分的なカラーまたは白黒中間画像を提供することにより、結果の画像のコントラストおよび/または鮮鋭度を改善することができる。結果の画像は有利には、画像自体に各中間画像よりさらに多くの情報(色、輝度領域、解像度他)を有する。
【0031】
本発明によれば、請求項8による画像取込装置もまた提示される。有利な実施形態では、本発明による画像取込装置は、本発明による方法の実施形態を実行するための手段を有する。
【0032】
有利な実施形態では、画像取込装置は、画像センサまたは光学素子の移動の少なくとも1つの軌道または経路におけるデータを格納するためのメモリ手段を有する。画像に関連する画素の光感度に対する軌道、したがって位置関連曲線は制御可能であり、したがって、様々な位置関連光感度プロファイルを得ることができ、この目的ために要求されるパラメータは、具体的にはカメラメーカにより格納されることが可能であり、使用者により再度呼び出されることが可能である。本発明の1つの実施形態では、例えば3つの異なる起動を呼び出さすことができる。風景写真を目的とする軌道の場合は、画素は、例えば、移動において、同一スペクトル感度の隣接画素の静止領域の部分だけを範囲に含み、その結果、高い画像鮮鋭度を生成するが、エイリアスアーチファクトの抑制度は低い。通常のショットを目的とする別の軌道の場合は、画素は、例えば、移動において、最も近い隣接画素の静止領域の大部分を範囲に含む。この軌道は、画像シーンの大部分に対して適切であるエイリアスアーチファクトの画像鮮鋭度と抑制度との間の妥協を提供する。第3の軌道の場合は、画素は、例えば、移動において、もっとも近いおよび部分的により離れている隣接画素の静止領域のすべてを範囲に含む。この軌道は、エイリアスアーチファクトの優れた抑制を備える人物写真に対して、鮮鋭度の所望の低減を可能にする。言うまでもなく、他のより精細に段階付けされたフィルタ特性が提供されてもよい。また、格納された軌道のそれぞれは、関連するデジタルポストフィルタリング機能と組み合わされることが提案される。従来の光学フィルタを有する画像取込装置は、現段階ではこの種類の可変フィルタリングを有していない。
【0033】
同一種類の2つまたはそれ以上の画像センサを有するカメラの場合は、有利には、移動のさらに異なる軌道または経路が、動作モードによる要求に応じて実行され、格納されてもよい。この方法では、動作モードは、例えば、輝度の増加領域または増加した画像の鮮鋭度を検出するために提供されてもよい。後者の場合は、センサ画素は、例えば、特定の方向に特定の間隔で相互にずらされ、これにより、既知の方法で、センサから画像を形成するデータの様々なセットからより大きい鮮鋭度の結果画像を生成する。好ましくは、この場合の軌道は、カメラが対応するより多数のピクセルまたはピクセル密度を有する単一センサのみを有するかのように使用され、これは、より小さい振幅および異なる形状の軌道を与える。センサの軌道はここでは同一または一致しているため、センサの代わりに、単一光学素子を移動させて、センサ上の画像を移動してもよい。
【0034】
画像センサが意図される軌道に応じて機械的に移動される場合は、好ましくは、機械的機構の少なくとも1つを同時に使用して、変位を生成する。この変位は、露光時間中は、別のセンサを基準として、1つの画像センサのある特定量でおよびある特定の方向において一定である。好ましくは、この量は再度保存され呼び出すことが可能であり、その結果、センサの変位が存在するおよび存在しない動作の2つのモードの間を所望通りに切り替えることを可能にする。好ましくは、格納し、さらに呼び出すことができるデータは、2つまたはそれ以上のセンサ画素の間の製造から生じる不要な機械的ずれを補正できる変位ベクトルであり、これはセンサ画素の横列または縦列の正確な平行整列のみが製造中に実施されなければならないことを意味する。
【0035】
本発明のさらなる利点および実施形態は説明および添付図面から明らかになる。
【0036】
言うまでもなく、上述および以下に説明される特徴は、任意の与えられた場合に特定される組み合わせにおいてだけではなく、本発明の範囲を超えることなく他の組み合わせにおいてまたはそれら組合せ自体に関して使用される。
【0037】
本発明の複数の実施形態は図面に概略形式で示され、本発明を説明するための図面を参照して以下に詳細に述べられる。
【0038】
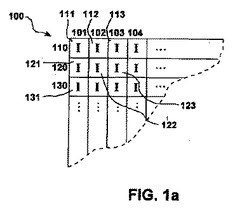
第1画像センサ100の細部が概略形式で図1aに示されている。画像センサ100は、正方形のラスタに配置されている同一スペクトル感度の画素Iを備える。センサ100はセンサの横列110、120、130他およびセンサの縦列101、102、103他を有する。同一種類の画素111、112、113他はセンサの横列110に隣接して配列され、同一種類の画素121、122、123他はセンサの横列120に隣接して配列されている。個々の画素間には、例えば、引き込み導体および他の電子部品が設けられるが、これらは概略図には示されていない。
【0039】
本発明の実施形態において使用するこの種類のセンサは、好ましくは画素を備え、これら画素は同時に可視スペクトルの全カラーまたは可視スペクトルの同一の小領域のみを記録できる。
【0040】
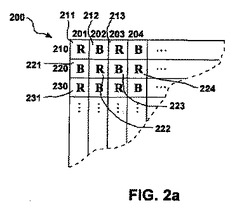
図2aには、第2画像センサ200の細部が概略的に示されている。画像センサ200は、正方形のラスタに配置された異なるスペクトル感度の画素RおよびBを備える。ここでの事例では、センサ200は、例えば赤の画素Rおよび青の画素Bを備え、これら画素はセンサの横列210、220、230他およびセンサの縦列201、202、203他において交互になるように配置されている。センサの横列210では、赤の画素211、213他および青の画素212、214他は、交互になるように隣接して配置され、センサの横列220では、青の画素221、223他および赤の画素22、224他は交互になるように隣接して配置されている。
【0041】
上述の第2センサ200は、例えば図3に示されている2−センサのカメラにおいて白黒または緑の画素を有する、図1aに示される画像センサ100と共に使用可能であり、上記カメラでは、単一の結果の画像78は2つのセンサ41、42からの画像データ71、72のセットから既知の方法で決定される。
【0042】
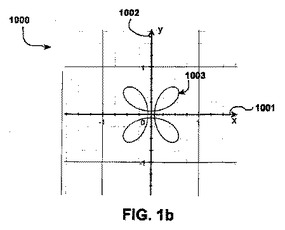
図1aに示されるセンサの軌道1003の例は、図1bのグラフ1000に示されている。グラフ1000は平面を画定するx軸1001およびy軸1002を有する。これはセンサの平面である。座標系の原点、すなわち軸1001および1002の交点は、センサの中心により表される静止または定位置に関連付けられている。画像センサの個々の画素のすべては、そのセンサの中心と共にセンサと同じように移動するため、原点は同様に個々の画素の中心に関連付けられてもよい。隣接する個々の画素の中心は軸1001および1002上の座標において間隔を空けている。例えば、画素122は座標系の原点(0/0)に位置し、画素123は位置(1/0)に位置し、画素112は位置(0/1)に位置し、以下同様である。
【0043】
軌道1003は、この場合においては、以下の式により定義される2つの円移動の重畳の結果である。
X=0.42cos(t)−0.35cos(3t)
Y=0.42sin(t)+0.35sin(3t)
【0044】
使用される数値は単に、a、b、c、dのような一般形式で表すことができるパラメータの好ましい例であることに留意すべきである。より一般的な公式は、X=a cos(t)−b cos(3t)およびy=c sin(t)+d sin(3t)の形式でそれぞれの場合において与えることができる。
【0045】
図示されている軌道はほぼ十文字形であり、十文字の主軸は座標軸から45°回転している。4つのアームはほぼ液滴状であり、その形状は、中心が座標軸に沿って等距離で間隔を空けている4つの円の重畳にほぼ一致する。本発明による教示はまた、例えば、渦巻き形軌道または実際上は任意の適切な形状の軌道を備えて実現されてもよい。
【0046】
軌道が横断される方向は重要ではない。係数はここでは、本事例では推定される画素の特性の例として、および本事例において推定される望ましい光感度プロファイルに対してのみ与えられる。さらに良好な結果が、例えばより小さい振幅のさらに速い円移動が相互に重畳される場合、本事例において達成される。
【0047】
この例では、センサ画素は、センサの感光領域と比較すると大幅に大きなサイズ、したがって隣接画素の静止点にまで延びる画像領域を検出し、結果として得られる光感度は、静止中心から外側に減少し、画素配置の幾何形状からもたらされる方向に所望の依存性を有する。
【0048】
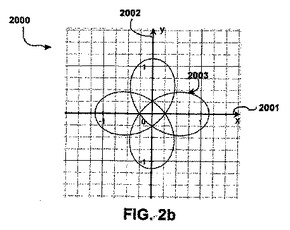
図1bと同様に、異なる色感度の2種類の画素(R、B)を有する、図2aに示されるセンサについての軌道2003の例が、図2bのグラフ2000に示されている。グラフ2000は同様に、平面を画定するx軸2001およびy軸2002を有する。座標系の原点は、上述のとおり、画素またはセンサの中心により表される静止または定位置に関連付けられている。R画素222は例えば座標系の原点(0/0)に位置し、B画素223は位置(1/0)に位置するが、最も近いR画素は位置211、213、231および233からさらに離れて位置する。
【0049】
2種類の画素(R、B)の幾何学的配置は同じであるため、軌道もまた、各型の画素に対して同一の光感度プロファイルをもたらす。同一色感度の最も近い隣接画素は、図1aに示されたセンサの場合よりも相互にさらに離れて位置し(約1.4倍)、異なる方向にある(45°)ため、異なる光感度プロファイルがまた得られることになる。したがって、このセンサのため、対応する軌道はより大きいサイズであり、異なる方向に向く。この場合においては、同様に、2つの円移動を重畳する結果であるが、異なる係数を備える。
X=0.48cos(t)−0.68cos(3t)
Y=0.48sin(t)+0.68sin(3t)
【0050】
この場合においてもまた、数値は、一般的な形式a、b、c、dで表すことができるパラメータの好ましい値である。
【0051】
図2bに示される軌道2003は図1bに示された軌道1003と類似しているが、特定の相違が存在する。軌道2003の場合は、十文字形のアームは座標軸2001、2002と平行に整列している。軌道の形状は、中心が座標系のほぼ対角線上にあり、半径が図1bの対応する半径よりも大きい、4つの円の重畳に一致する。
【0052】
図1の場合と同様に、この場合においては、さらに良好な結果は、例えばより小さい振幅のさらにより速い円移動が相互に重畳される場合に達成される。
【0053】
他の実施形態では、また、全体的に異なる種類の軌道を用いて、所望の光感度プロファイルを達成することができる。2つの円運動の重畳がここでは選択された。この理由は、上記重畳は技術的に実現するのが特に容易である、およびこの場合における所望の結果に対して優れた近似を可能にするためである。しかし、軌道が全体的に異なる関数により同様に適切に定義されてもよいこと、およびここで述べられている実施形態は、単に例示と見られるべきであり、限定と見なされるべきではないということは言うまでもない。
【0054】
図3には、本発明による光学的プレフィルタリングの1つの例を有し、かつ全体として参照符号3により特定されたデジタルカメラの実施形態が示されている。このデジタルカメラでは、対物レンズ10により取り込まれた画像は回転するセクタに分割されたミラーホイール31により2つの画像センサ41および42に投射される。画像センサ41は図1aに示されている白黒または緑の画像センサの形式を取り、画像センサ42は図2aに示されている赤/青センサの形式を取る。図示されている本発明の実施形態では、画像センサ41は、露光の間に、モータ51によって図1bに示される軌道に沿って移動され、画像センサ42はモータ52により図2bに示される軌道に沿って移動される。移動のそれぞれの平面は図の平面と垂直である。
【0055】
セクタに分割されたミラーホイール31は高速で回転し、反射性セクタおよび透過セクタを有するように形成され、これは、露光時間中に取り込まれた画像が、交互にそれぞれ画像センサ41および42に、可能な場合1回より多く投射され、これにより、両方のセクタに実質的に同時露光が生じる。
【0056】
各画像センサに対して常に露光がなされるため、画像の露光時間中にセンサの個々の軌道の少なくとも正確に完全な1サイクルから光を受光する。しかし、画像を分散するためのプリズムを有するカメラとは異なり、この種類の1サイクルの間のセンサ上への光束は、露光時間中に、セクタに分割されたミラーホイールのセクタにより1回または複数回数、遮断または減衰される。センサ画素がセクタに分割されたミラーホイールにより影響されない光感度プロファイルを有することを保証するために、好ましくは常に、任意の所望の開始点で、移動の経路または軌道の偶数の完全なサイクルであり、このサイクルが画素の露光時間中に実行される。加えて、ミラーセクタおよび空隙セクタは好ましくは、同じ角度幅であり、セクタに分割されたホイールが動く回転角度は好ましくは常に、ミラーセクタによりカバーされる角度の奇数倍に空隙セクタによりカバーされる角度を加えた角度である。3つの画像に画像を分割するために2つの回転するセクタ分割されたミラーホイールを有するカメラでは、同様の状態が当てはまる。
【0057】
2つのセンサ100および200ではなく、2つの同一センサが使用される場合、要求される軌道もまた同一である。この場合には、センサ41、42は2つの駆動部52、52により移動されるのでなく、駆動部55により横方向に移動され、かつ画像分散器31の前面に位置する単一光学素子56を用いて、画像とセンサとの間の相対移動を発生することができる。当然、それ自体の駆動部を有する光学素子を各センサの前面に設けることもまた可能である。個別のセンサ駆動部が存在する場合と同様に、この後者の光学素子はまた、2つのセンサ画素の間の所望の静的なずれを可能にする。上ですでに説明されたとおり、この種のずれを既知の方法で利用することにより、結果の画像78の鮮鋭度を増加することができる。モータ制御式駆動部のため、このずれは、例えば、同様に既知の方法で、輝度の大きな領域を示すことができる結果の画像を生成するために、どの時点においても再度取り消すことができる。
【0058】
それぞれの中間画像71および72は画像センサ41および42により取り込まれる。中間画像71および72は、既知の方法で結果の画像78を生成する画像処理デバイス75に供給される。図3に示されるデジタルカメラはまた、画像センサ41および42、モータ51、52および該当する場合は55、画像処理デバイス75および任意の別の手段またはデバイスを制御することを目的とするカメラ制御デバイス60を有する。
【技術分野】
【0001】
本発明は、独立請求項の前文に定義されるとおり、空間周波数フィルタリング方法および画像取込装置に関する。
【背景技術】
【0002】
以下の説明では、基本的にはフィルムカメラが参照されるが、本発明はこれらに限定されない。本発明による方法は、例えば写真カメラまたは他の画像取込装置にも同等に適用できることが理解される。
【0003】
可能な限り自然のままの、アーチファクトがない画像を取り込み可能にするために、通常の画素配置を有するデジタル光電画像センサを有するカメラは、光学的プレフィルタリング、すなわち空間周波数フィルタリングの機能を装備している。エイリアシング効果を回避する必要がある場合、デジタル画像センサにおいて光学的プレフィルタリングが原理的に要求される。いわゆるエイリアス構造体は、例えば、データのデジタルフィルタリングにより後の段階で画素から除去することが不可能である。この理由は、デジタルデータはエイリアス構造体と画像内のシーンを形成する構造体との間で何らかの区別をなさないためである。
【0004】
理論的背景はナイキスト−シャノンのサンプリング定理に関連して知られている。ナイキスト周波数は標本化周波数の半分で与えられる。
【0005】
したがって、光学的プレフィルタリング、すなわち空間周波数フィルタリングは、対物レンズにより画像センサ上に投射される取り込みシーンの画像内のすべてのエイリアス構造体(同一スペクトル感度の2つの隣接する画素間の距離より小さいまたは細かい)を可能な限り完全に抑制圧しなければならず、また可能な限り、これより大きいすべての構造体を抑制してはならない。これは技術的には不可能であり、この理由のため、エイリアスアーチファクトの抑制と、可能な限り高い画像鮮鋭度との間で常に妥協がなされなければならない。
【0006】
画像センサの理論上の理想的な画素の光感度は、画素の中心からの距離が増加すると減少しなければならないが、この場合、隣接画素上の点も同様に範囲に含まれる。対応する方向依存性曲線は、実際のセンサ画素の光感度による位置依存性曲線と、センサ画素の相互の幾何学的な配置との両方に依存し、また高い画像鮮鋭度とエイリアスアーチファクトの高い抑制度との間の所望の妥協点に依存する。理想的な光学的プレフィルタリングは、画素が可能な限り理想的と考えられる画素の光感度曲線を有するように、実際のセンサ画素上に画像の光を分散しなければならない。
【0007】
従来技術ではこれを達成する様々な方法が存在する。画像に関連するセンサ画素の光感度曲線が、対物レンズの不鮮明度または不鮮鋭度により単独で変更されるデジタル画像取込装置が存在する。しかし、所望の曲線はすべての状況においてこの方法では達成されないため、特別に設計された光学フィルタが一般に使用される。この方法では、センサ画素の前面に配置される散乱ディスクが使用され、この散乱ディスクが全方向に入射光を拡大することにより、画素は画像のより広い領域を記録する。しかし、フィルタリングに対して要求される方向への依存性は、この方法では達成できない。このことから、水晶における複屈折原理に基づくフィルタが特に使用される。入射光はフィルタによって、例えば、2つまたは4つの発生光線に分割され、これにより方向依存性フィルタリングが達成され、本質的に通常の画素配置に対するより優れた結果を与える。この種の方法は特許文献1に開示されている。
【0008】
特許文献2では、対物レンズと画像センサとの間の距離を変更することによりモアレパターンの発生を検出できる、画像取込装置が開示されている。モアレ効果の厳密性は次に、対物レンズを移動することによりすなわち画像の焦点外れを起こすことにより、所望のしきい値レベルより下に低減される。
【0009】
しかし、所望の位置依存性フィルタ曲線はこれらの方法では達成できない。
【0010】
任意の光学的プレフィルタリングの有効性を増加する1つの可能な方法は、所望の解像度より高い解像度(結果)を与える画像センサを使用することである。フィルタリング性能は、画素ラスタの細かさ、すなわち周波数とその結果のラスタとの間の割合によって向上する。しかし、この解決策はより低い光感度をもたらす結果になる。この理由は、多数の画素を有するセンサにおいては、センサ上で必要とされる引き込み導体に起因してピクセル当たりの有効感光面積が減少することと、これら引き込み導体が必要とするピクセル当たりの面積のサイズが同じに留まることとによる。さらに、この解決策はまた、データ処理の必要量を増加させる結果になり、これに関連して、エネルギー消費がより大きい高性能電子回路を使用する必要性をもたらす結果になる。
【0011】
既知の光学的プレフィルタリング構成の別の欠点は、フィルタ曲線の形状または特性が固定されて事前設定され、変更できないという事実にある。他方では、フィルタリングの特性を状況に合うように適応できる利点がある。人物写真では、例えばエイリアスアーチファクトを厳密に抑制する必要があるが、焦点または鮮鋭度に対する要求はあまり厳しくない。これに対して、風景写真のような多くの細部および少数しかない規則的な構造体が存在する中距離−長距離ショットでは、一般に、少数のエイリアスアーチファクトが発生するだけであり、可能な最高鮮鋭度が主として考慮される。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】日本特許第10229525A号明細書
【特許文献2】米国特許第5915047A号明細書
【発明の概要】
【発明が解決しようとする課題】
【0013】
したがって存在する目的は、改善された光学的プレフィルタリングすなわち空間周波数フィルタリングを提供することである。
【課題を解決するための手段】
【0014】
本発明によれば、空間周波数フィルタリング方法および画像取込装置は独立請求項の特徴を備えて提示される。
【0015】
以下に与えられる説明の詳細および利点は、明確に否定して記述されない限り、本発明によるすべての解決策に関係する。本発明に係る画像取込装置は、記載のステップを実行するための適切な手段を備える。
【0016】
感光画素を有する1つまたは複数のデジタル光電画像センサ上に取込画像を投射する対物レンズを有する画像取込装置における、空間周波数フィルタリング方法が提案される。画像を取り込み中、少なくとも1つの光電画像センサおよびこのセンサ上に対物レンズによりこれに投射される画像は、具体的には制御可能または調節可能な方法で、画素の平面内で相互に移動される。これは実際には、画像を固定して維持する間に画像センサを移動することにより、または画像センサを固定して維持する間に画像を移動することにより、または2つの移動の組み合わせにより達成できる。いずれのオプションにも特定の利点が存在し、これらは後の段階で詳細に説明される。述べられているプロセスでは、相対移動の移動ベクトルは事前決定可能な占有の点(占有される点)を範囲に含み、占有の期間またはこれら占有される点のそれぞれの速度は事前に決定できる。このように、移動ベクトルは、移動を特徴付けるために使用される、移動の好ましくは閉じた軌道または経路を定義する。
【0017】
場合により、センサの各画素が画像に対して移動するか、または画像がセンサに対して移動し、これは、相対移動がない場合に比べて画像のより広い領域を検出することを意味する。速度がより遅いすなわち占有の期間がより長い場合の移動ベクトル上の点は、露光時間が増加する場所、したがってまたセンサ画素の相対光感度が画像内の対応点に対して増加する場所の点を構成する。
【0018】
占有の点(占有される点とも称される)、および速度または言い換えるとこれら点に関連する位置ベクトルの占有期間、ならびに実際の画素の幾何学的配置およびそれら画素の光感度に対する位置依存性曲線を適切に事前設定することにより、画像に関連するセンサ画素の位置依存性光感度に対する任意の所望の曲線を得ることができる。
【0019】
本発明の別の特定の利点は、軌道を可変的に形成できる能力にある。この方法により、以下に説明されるとおり、カメラの様々な撮影状況および動作モードに適合するように適応される、光学的プレフィルタリングを達成することが可能である。
【図面の簡単な説明】
【0020】
【図1a】本発明の実施形態による使用に対する第1画像センサの細部または切断図を示している。
【図1b】図1aに示されたセンサについてのセンサと画像との間の相対移動の軌道の実施形態を示している。
【図2a】本発明の実施形態において使用するための第2画像センサの細部を示している。
【図2b】図2aに示されたセンサについてのセンサと画像との間の相対移動の軌道の実施形態を示している。
【図3】画像を2つの画像センサに分散するための回転ミラーホイールを有するミラーの実施形態を示している。
【発明を実施するための形態】
【0021】
有利な実施形態は従属請求項および以下の説明の主題を形成する。
【0022】
センサと画像との間の相対移動は、様々な方法、例えば電磁駆動要素またはピエゾ効果により作動する要素によって生じさせることができる。このようにして、画像センサまたは光学素子を低い製造コストで任意の所望の軌道に沿って可変速度で移動させることができる。
【0023】
説明を簡略化するために、以下では、センサまたはピクセルの軌道または移動が述べられる場合は、センサと画像との間の相対移動を常に意味する。この相対移動はまた、これがその場合ではないと明確に述べられていない限り、センサの前面に挿入される光学素子の移動により発生されてもよい。ここで参照される実現性は、例えば、デジタルカメラおよびフィルムカメラが装着される、従来の画像安定化機構を使用するものである。この種類の画像安定化機構は例えば日本特開2004−271694A号公報に示されている。このような機構では、光学素子、例えばセンサの前面に挿入されるレンズ、レンズまたはプリズム群は機械的に調節でき、具体的には、横方向に移動および/または旋回でき、これによりカメラの使用者側の振動または旋回運動を補償できる。これが意味することは、従来の画像安定機構によりセンサによって取り込まれる画像の部分を一定に維持できることである。適切に再プログラミングすることにより、この種の機構を用いてセンサに対する取込画像の相対移動を発生させることが可能である。
【0024】
本発明は原理的にすべての種類のデジタル画像センサにおいて使用できる。本発明のプレフィルタリングにおける軌道は必然的に常にセンサ画素のすべてに対して同一であるため、その結果異なるスペクトル光感度の画素を有するセンサが存在する場合、各種類の画素は好ましくは同一の静的、位置関連相対光感度およびセンサの領域内で同一の幾何学的位置を有し、したがってまた同一数の各種類の画素が存在しなければならない。
【0025】
上ですでに説明したとおり、軌道は、特に、画像に関連する画素の所望の位置関連の光感度曲線と、同一スペクトル感度の隣接画素の幾何学的配置と、画素の形状と、画素の上方にある任意の集光レンズとの関数として形成されなければならない。例えば、同一スペクトル感度の画素と隣接画素との間の距離が、垂直方向においてよりも水平方向において大きい場合、軌道の形状はこの非対称性を認めなければならない。所望通りに形成できる軌道の利点は、具体的には、軌道の特定の画素配置およびパラメータを取ることによって、任意の種類の画像センサに対して最適な方法で任意の所望の光学フィルタ曲線を得ることができる点である。
【0026】
軌道に対しては広範囲の様々な変形形態が考えられる。この方法では、例えば、多くの場合は、所望の位置関連光感度曲線の近似を達成するために、互いに異なる周波数および振幅の単純な円移動または正弦移動を相互に重畳した結果である軌道を単に使用することで十分である。正弦相対移動の一般形式は、具体的には、以下の式で表される。
【数1】
ただし、ω=2πfおよびf=1/Tであり、Tは画像取り込み時間である。
【0027】
技術手段および画素の物理的ならびに幾何学的特性により生成されるこの種の軌道上の占有される点と占有の期間との間の関係から、画像に関連する画素に対する位置依存性相対光感度プロファイルを導き出すことが可能であり、これにより、所望の光感度プロファイルとの比較を行うことにより優れた近似を生成する方法を評価することができる。
【0028】
移動により得られる画像に関連する画素の相対的光感度に対する位置関連曲線が露光時間に依存しないようにするには、センサまたは光学素子の移動が画像取り込みの露光時間と同期されることが有効である。これは、具体的には速度変化により達成されるため技術的に容易である。露光または画像取り込みの間、軌道はしたがって、整数回数(すなわち1回または1回より多い回数)、横断されなければならない。
【0029】
プレフィルタリングに対応するポストフィルタリングはデジタル的に実行されることが特に有効である。これは、様々な位置関連光感度プロファイルのそれぞれが、取り込まれる望ましいおよび望ましくない構造体を、特定の方法で、センサからの画像信号において生成するという理由から、有利である。後続の下流のデジタルフィルタリングの特性は、具体的には、その時点で動作する光学的プレフィルタ特性に対する画像処理電子技術により対応される場合に限り、結果としての最適画像が取得される。特定のデジタルポストフィルタリングに対して要求される特性は、光学的プレフィルタリングにおける所定の位置関連光感度プロファイルから計算できる。
【0030】
別の好ましい実施形態では、少なくとも2つの同一でない中間画像が取り込まれ、その後に処理されて結果の画像が得られる。中間画像は、例えば、好ましくは一列の画素ずつ移動された1つの画像センサにより、ショットの間に連続的に取り込まれる。同様に、中間画像は少なくとも2つの画像センサにより取り込まれてもよい。フルカラー画像が、例えば具体的にはBayerセンサまたはFOVEON X3画像センサにより取り込まれてもよく、または白黒画像または部分的なカラー画像が取り込まれてもよい。好ましくは、白黒中間画像は、1つの画像センサにより取り込まれるかまたは生成され、赤/青中間画像は別の画像センサにより取り込まれるかまたは生成される。少なくとも2つの同一ではないフルカラー、部分的なカラーまたは白黒中間画像を提供することにより、結果の画像のコントラストおよび/または鮮鋭度を改善することができる。結果の画像は有利には、画像自体に各中間画像よりさらに多くの情報(色、輝度領域、解像度他)を有する。
【0031】
本発明によれば、請求項8による画像取込装置もまた提示される。有利な実施形態では、本発明による画像取込装置は、本発明による方法の実施形態を実行するための手段を有する。
【0032】
有利な実施形態では、画像取込装置は、画像センサまたは光学素子の移動の少なくとも1つの軌道または経路におけるデータを格納するためのメモリ手段を有する。画像に関連する画素の光感度に対する軌道、したがって位置関連曲線は制御可能であり、したがって、様々な位置関連光感度プロファイルを得ることができ、この目的ために要求されるパラメータは、具体的にはカメラメーカにより格納されることが可能であり、使用者により再度呼び出されることが可能である。本発明の1つの実施形態では、例えば3つの異なる起動を呼び出さすことができる。風景写真を目的とする軌道の場合は、画素は、例えば、移動において、同一スペクトル感度の隣接画素の静止領域の部分だけを範囲に含み、その結果、高い画像鮮鋭度を生成するが、エイリアスアーチファクトの抑制度は低い。通常のショットを目的とする別の軌道の場合は、画素は、例えば、移動において、最も近い隣接画素の静止領域の大部分を範囲に含む。この軌道は、画像シーンの大部分に対して適切であるエイリアスアーチファクトの画像鮮鋭度と抑制度との間の妥協を提供する。第3の軌道の場合は、画素は、例えば、移動において、もっとも近いおよび部分的により離れている隣接画素の静止領域のすべてを範囲に含む。この軌道は、エイリアスアーチファクトの優れた抑制を備える人物写真に対して、鮮鋭度の所望の低減を可能にする。言うまでもなく、他のより精細に段階付けされたフィルタ特性が提供されてもよい。また、格納された軌道のそれぞれは、関連するデジタルポストフィルタリング機能と組み合わされることが提案される。従来の光学フィルタを有する画像取込装置は、現段階ではこの種類の可変フィルタリングを有していない。
【0033】
同一種類の2つまたはそれ以上の画像センサを有するカメラの場合は、有利には、移動のさらに異なる軌道または経路が、動作モードによる要求に応じて実行され、格納されてもよい。この方法では、動作モードは、例えば、輝度の増加領域または増加した画像の鮮鋭度を検出するために提供されてもよい。後者の場合は、センサ画素は、例えば、特定の方向に特定の間隔で相互にずらされ、これにより、既知の方法で、センサから画像を形成するデータの様々なセットからより大きい鮮鋭度の結果画像を生成する。好ましくは、この場合の軌道は、カメラが対応するより多数のピクセルまたはピクセル密度を有する単一センサのみを有するかのように使用され、これは、より小さい振幅および異なる形状の軌道を与える。センサの軌道はここでは同一または一致しているため、センサの代わりに、単一光学素子を移動させて、センサ上の画像を移動してもよい。
【0034】
画像センサが意図される軌道に応じて機械的に移動される場合は、好ましくは、機械的機構の少なくとも1つを同時に使用して、変位を生成する。この変位は、露光時間中は、別のセンサを基準として、1つの画像センサのある特定量でおよびある特定の方向において一定である。好ましくは、この量は再度保存され呼び出すことが可能であり、その結果、センサの変位が存在するおよび存在しない動作の2つのモードの間を所望通りに切り替えることを可能にする。好ましくは、格納し、さらに呼び出すことができるデータは、2つまたはそれ以上のセンサ画素の間の製造から生じる不要な機械的ずれを補正できる変位ベクトルであり、これはセンサ画素の横列または縦列の正確な平行整列のみが製造中に実施されなければならないことを意味する。
【0035】
本発明のさらなる利点および実施形態は説明および添付図面から明らかになる。
【0036】
言うまでもなく、上述および以下に説明される特徴は、任意の与えられた場合に特定される組み合わせにおいてだけではなく、本発明の範囲を超えることなく他の組み合わせにおいてまたはそれら組合せ自体に関して使用される。
【0037】
本発明の複数の実施形態は図面に概略形式で示され、本発明を説明するための図面を参照して以下に詳細に述べられる。
【0038】
第1画像センサ100の細部が概略形式で図1aに示されている。画像センサ100は、正方形のラスタに配置されている同一スペクトル感度の画素Iを備える。センサ100はセンサの横列110、120、130他およびセンサの縦列101、102、103他を有する。同一種類の画素111、112、113他はセンサの横列110に隣接して配列され、同一種類の画素121、122、123他はセンサの横列120に隣接して配列されている。個々の画素間には、例えば、引き込み導体および他の電子部品が設けられるが、これらは概略図には示されていない。
【0039】
本発明の実施形態において使用するこの種類のセンサは、好ましくは画素を備え、これら画素は同時に可視スペクトルの全カラーまたは可視スペクトルの同一の小領域のみを記録できる。
【0040】
図2aには、第2画像センサ200の細部が概略的に示されている。画像センサ200は、正方形のラスタに配置された異なるスペクトル感度の画素RおよびBを備える。ここでの事例では、センサ200は、例えば赤の画素Rおよび青の画素Bを備え、これら画素はセンサの横列210、220、230他およびセンサの縦列201、202、203他において交互になるように配置されている。センサの横列210では、赤の画素211、213他および青の画素212、214他は、交互になるように隣接して配置され、センサの横列220では、青の画素221、223他および赤の画素22、224他は交互になるように隣接して配置されている。
【0041】
上述の第2センサ200は、例えば図3に示されている2−センサのカメラにおいて白黒または緑の画素を有する、図1aに示される画像センサ100と共に使用可能であり、上記カメラでは、単一の結果の画像78は2つのセンサ41、42からの画像データ71、72のセットから既知の方法で決定される。
【0042】
図1aに示されるセンサの軌道1003の例は、図1bのグラフ1000に示されている。グラフ1000は平面を画定するx軸1001およびy軸1002を有する。これはセンサの平面である。座標系の原点、すなわち軸1001および1002の交点は、センサの中心により表される静止または定位置に関連付けられている。画像センサの個々の画素のすべては、そのセンサの中心と共にセンサと同じように移動するため、原点は同様に個々の画素の中心に関連付けられてもよい。隣接する個々の画素の中心は軸1001および1002上の座標において間隔を空けている。例えば、画素122は座標系の原点(0/0)に位置し、画素123は位置(1/0)に位置し、画素112は位置(0/1)に位置し、以下同様である。
【0043】
軌道1003は、この場合においては、以下の式により定義される2つの円移動の重畳の結果である。
X=0.42cos(t)−0.35cos(3t)
Y=0.42sin(t)+0.35sin(3t)
【0044】
使用される数値は単に、a、b、c、dのような一般形式で表すことができるパラメータの好ましい例であることに留意すべきである。より一般的な公式は、X=a cos(t)−b cos(3t)およびy=c sin(t)+d sin(3t)の形式でそれぞれの場合において与えることができる。
【0045】
図示されている軌道はほぼ十文字形であり、十文字の主軸は座標軸から45°回転している。4つのアームはほぼ液滴状であり、その形状は、中心が座標軸に沿って等距離で間隔を空けている4つの円の重畳にほぼ一致する。本発明による教示はまた、例えば、渦巻き形軌道または実際上は任意の適切な形状の軌道を備えて実現されてもよい。
【0046】
軌道が横断される方向は重要ではない。係数はここでは、本事例では推定される画素の特性の例として、および本事例において推定される望ましい光感度プロファイルに対してのみ与えられる。さらに良好な結果が、例えばより小さい振幅のさらに速い円移動が相互に重畳される場合、本事例において達成される。
【0047】
この例では、センサ画素は、センサの感光領域と比較すると大幅に大きなサイズ、したがって隣接画素の静止点にまで延びる画像領域を検出し、結果として得られる光感度は、静止中心から外側に減少し、画素配置の幾何形状からもたらされる方向に所望の依存性を有する。
【0048】
図1bと同様に、異なる色感度の2種類の画素(R、B)を有する、図2aに示されるセンサについての軌道2003の例が、図2bのグラフ2000に示されている。グラフ2000は同様に、平面を画定するx軸2001およびy軸2002を有する。座標系の原点は、上述のとおり、画素またはセンサの中心により表される静止または定位置に関連付けられている。R画素222は例えば座標系の原点(0/0)に位置し、B画素223は位置(1/0)に位置するが、最も近いR画素は位置211、213、231および233からさらに離れて位置する。
【0049】
2種類の画素(R、B)の幾何学的配置は同じであるため、軌道もまた、各型の画素に対して同一の光感度プロファイルをもたらす。同一色感度の最も近い隣接画素は、図1aに示されたセンサの場合よりも相互にさらに離れて位置し(約1.4倍)、異なる方向にある(45°)ため、異なる光感度プロファイルがまた得られることになる。したがって、このセンサのため、対応する軌道はより大きいサイズであり、異なる方向に向く。この場合においては、同様に、2つの円移動を重畳する結果であるが、異なる係数を備える。
X=0.48cos(t)−0.68cos(3t)
Y=0.48sin(t)+0.68sin(3t)
【0050】
この場合においてもまた、数値は、一般的な形式a、b、c、dで表すことができるパラメータの好ましい値である。
【0051】
図2bに示される軌道2003は図1bに示された軌道1003と類似しているが、特定の相違が存在する。軌道2003の場合は、十文字形のアームは座標軸2001、2002と平行に整列している。軌道の形状は、中心が座標系のほぼ対角線上にあり、半径が図1bの対応する半径よりも大きい、4つの円の重畳に一致する。
【0052】
図1の場合と同様に、この場合においては、さらに良好な結果は、例えばより小さい振幅のさらにより速い円移動が相互に重畳される場合に達成される。
【0053】
他の実施形態では、また、全体的に異なる種類の軌道を用いて、所望の光感度プロファイルを達成することができる。2つの円運動の重畳がここでは選択された。この理由は、上記重畳は技術的に実現するのが特に容易である、およびこの場合における所望の結果に対して優れた近似を可能にするためである。しかし、軌道が全体的に異なる関数により同様に適切に定義されてもよいこと、およびここで述べられている実施形態は、単に例示と見られるべきであり、限定と見なされるべきではないということは言うまでもない。
【0054】
図3には、本発明による光学的プレフィルタリングの1つの例を有し、かつ全体として参照符号3により特定されたデジタルカメラの実施形態が示されている。このデジタルカメラでは、対物レンズ10により取り込まれた画像は回転するセクタに分割されたミラーホイール31により2つの画像センサ41および42に投射される。画像センサ41は図1aに示されている白黒または緑の画像センサの形式を取り、画像センサ42は図2aに示されている赤/青センサの形式を取る。図示されている本発明の実施形態では、画像センサ41は、露光の間に、モータ51によって図1bに示される軌道に沿って移動され、画像センサ42はモータ52により図2bに示される軌道に沿って移動される。移動のそれぞれの平面は図の平面と垂直である。
【0055】
セクタに分割されたミラーホイール31は高速で回転し、反射性セクタおよび透過セクタを有するように形成され、これは、露光時間中に取り込まれた画像が、交互にそれぞれ画像センサ41および42に、可能な場合1回より多く投射され、これにより、両方のセクタに実質的に同時露光が生じる。
【0056】
各画像センサに対して常に露光がなされるため、画像の露光時間中にセンサの個々の軌道の少なくとも正確に完全な1サイクルから光を受光する。しかし、画像を分散するためのプリズムを有するカメラとは異なり、この種類の1サイクルの間のセンサ上への光束は、露光時間中に、セクタに分割されたミラーホイールのセクタにより1回または複数回数、遮断または減衰される。センサ画素がセクタに分割されたミラーホイールにより影響されない光感度プロファイルを有することを保証するために、好ましくは常に、任意の所望の開始点で、移動の経路または軌道の偶数の完全なサイクルであり、このサイクルが画素の露光時間中に実行される。加えて、ミラーセクタおよび空隙セクタは好ましくは、同じ角度幅であり、セクタに分割されたホイールが動く回転角度は好ましくは常に、ミラーセクタによりカバーされる角度の奇数倍に空隙セクタによりカバーされる角度を加えた角度である。3つの画像に画像を分割するために2つの回転するセクタ分割されたミラーホイールを有するカメラでは、同様の状態が当てはまる。
【0057】
2つのセンサ100および200ではなく、2つの同一センサが使用される場合、要求される軌道もまた同一である。この場合には、センサ41、42は2つの駆動部52、52により移動されるのでなく、駆動部55により横方向に移動され、かつ画像分散器31の前面に位置する単一光学素子56を用いて、画像とセンサとの間の相対移動を発生することができる。当然、それ自体の駆動部を有する光学素子を各センサの前面に設けることもまた可能である。個別のセンサ駆動部が存在する場合と同様に、この後者の光学素子はまた、2つのセンサ画素の間の所望の静的なずれを可能にする。上ですでに説明されたとおり、この種のずれを既知の方法で利用することにより、結果の画像78の鮮鋭度を増加することができる。モータ制御式駆動部のため、このずれは、例えば、同様に既知の方法で、輝度の大きな領域を示すことができる結果の画像を生成するために、どの時点においても再度取り消すことができる。
【0058】
それぞれの中間画像71および72は画像センサ41および42により取り込まれる。中間画像71および72は、既知の方法で結果の画像78を生成する画像処理デバイス75に供給される。図3に示されるデジタルカメラはまた、画像センサ41および42、モータ51、52および該当する場合は55、画像処理デバイス75および任意の別の手段またはデバイスを制御することを目的とするカメラ制御デバイス60を有する。
【特許請求の範囲】
【請求項1】
感光画素(111、112、113、他、211、212、213、他)を備える1つまたは複数の光電画像センサ(100;200;41、42)上に取り込み画像を投射する対物レンズ(10)を有する画像取込装置(3)において空間周波数フィルタリングをする方法であって、
画像取り込みの間に、少なくとも1つの光電画像センサ(100;200;41、42)と前記光電画像センサ上に投射された画像とは、画素平面内で互いに相対移動をし、この相対移動の空間ベクトルはそれぞれ所定の占有期間にわたり所定の占有位置を範囲に含む、ことを特徴とする方法。
【請求項2】
前記画像センサ(100;200;41、42)と前記画像との間の前記相対移動は、前記画素の前記平面内で前記画像センサ(100;200;41、42)を移動することにより、および/または光学素子を移動することにより生成されることを特徴とする、請求項1に記載の方法。
【請求項3】
前記画像センサ(100;200;41、42)と前記画像との間の前記相対移動は、正弦移動の重畳であることを特徴とする、請求項1または2に記載の方法。
【請求項4】
前記画像に関連する画像センサ画素の前記光感度に対する所望の位置依存性曲線は、前記相対移動の前記空間ベクトルの前記占有点および前記占有期間を変更することにより生成され、前記空間ベクトルは、好ましくは、前記画像取り込み中に1つまたは複数の完全な軌道サイクル(1003;2003)を横断することを特徴とする、請求項1、2または3に記載の方法。
【請求項5】
前記相対移動は、前記画像取り込み露光時間と同期されることを特徴とする、請求項1〜4のいずれか1項に記載の方法。
【請求項6】
前記空間周波数フィルタリングに対応するデジタルポストフィルタリングが実行されることを特徴とする、請求項1〜5のいずれか1項に記載の方法。
【請求項7】
少なくとも2つの同一ではない中間画像(71、72)が少なくとも1つの光電画像センサ(100;200;41、42)により取り込まれ、処理されて、結果の画像(78)が生成されることを特徴とする、請求項1〜6のいずれか1項に記載の方法。
【請求項8】
感光画素(111、112、他、211、212、他)を有する1つまたは複数の光電画像センサ(100;200;41、42)上に取り込み画像を投射する対物レンズ(10)を有する、具体的にはデジタルカメラ(3)である画像取込装置であって、
画素平面内で少なくとも1つの光電画像センサ(100;200;41、42)および/または少なくとも1つの光学素子(56)を移動することによって、画像取り込みの間に、少なくとも1つの光電画像センサ(100;200;41、42)と、前記光電画像センサ上に投射された画像との間の相対移動を生成する手段(51、52、55)により、画像センサ(100;200;41、42)上の画像をセンサ画素の平面内で移動し、この相対移動の空間ベクトルはそれぞれ所定の占有期間にわたり所定の占有位置を範囲に含むことを特徴とする、
画像取込装置。
【請求項9】
前記画像センサと前記画像との間の相対移動の前記手段を使用して追加の変位を同時生成し、この追加の変位は、少なくとも前記画像取り込み露出時間中は、前記画像センサと画像との間で、事前設定された変位量でおよび事前設定された変位方向に、前記画素の前記平面内で一定であることを特徴とする、請求項8に記載の画像取込装置。
【請求項10】
画像変位に対する画像センサおよび/または光学素子のうちの少なくとも1つの軌道上のデータを格納するためのメモリ手段を備えることを特徴とする、請求項8または9に記載の画像取込装置。
【請求項1】
感光画素(111、112、113、他、211、212、213、他)を備える1つまたは複数の光電画像センサ(100;200;41、42)上に取り込み画像を投射する対物レンズ(10)を有する画像取込装置(3)において空間周波数フィルタリングをする方法であって、
画像取り込みの間に、少なくとも1つの光電画像センサ(100;200;41、42)と前記光電画像センサ上に投射された画像とは、画素平面内で互いに相対移動をし、この相対移動の空間ベクトルはそれぞれ所定の占有期間にわたり所定の占有位置を範囲に含む、ことを特徴とする方法。
【請求項2】
前記画像センサ(100;200;41、42)と前記画像との間の前記相対移動は、前記画素の前記平面内で前記画像センサ(100;200;41、42)を移動することにより、および/または光学素子を移動することにより生成されることを特徴とする、請求項1に記載の方法。
【請求項3】
前記画像センサ(100;200;41、42)と前記画像との間の前記相対移動は、正弦移動の重畳であることを特徴とする、請求項1または2に記載の方法。
【請求項4】
前記画像に関連する画像センサ画素の前記光感度に対する所望の位置依存性曲線は、前記相対移動の前記空間ベクトルの前記占有点および前記占有期間を変更することにより生成され、前記空間ベクトルは、好ましくは、前記画像取り込み中に1つまたは複数の完全な軌道サイクル(1003;2003)を横断することを特徴とする、請求項1、2または3に記載の方法。
【請求項5】
前記相対移動は、前記画像取り込み露光時間と同期されることを特徴とする、請求項1〜4のいずれか1項に記載の方法。
【請求項6】
前記空間周波数フィルタリングに対応するデジタルポストフィルタリングが実行されることを特徴とする、請求項1〜5のいずれか1項に記載の方法。
【請求項7】
少なくとも2つの同一ではない中間画像(71、72)が少なくとも1つの光電画像センサ(100;200;41、42)により取り込まれ、処理されて、結果の画像(78)が生成されることを特徴とする、請求項1〜6のいずれか1項に記載の方法。
【請求項8】
感光画素(111、112、他、211、212、他)を有する1つまたは複数の光電画像センサ(100;200;41、42)上に取り込み画像を投射する対物レンズ(10)を有する、具体的にはデジタルカメラ(3)である画像取込装置であって、
画素平面内で少なくとも1つの光電画像センサ(100;200;41、42)および/または少なくとも1つの光学素子(56)を移動することによって、画像取り込みの間に、少なくとも1つの光電画像センサ(100;200;41、42)と、前記光電画像センサ上に投射された画像との間の相対移動を生成する手段(51、52、55)により、画像センサ(100;200;41、42)上の画像をセンサ画素の平面内で移動し、この相対移動の空間ベクトルはそれぞれ所定の占有期間にわたり所定の占有位置を範囲に含むことを特徴とする、
画像取込装置。
【請求項9】
前記画像センサと前記画像との間の相対移動の前記手段を使用して追加の変位を同時生成し、この追加の変位は、少なくとも前記画像取り込み露出時間中は、前記画像センサと画像との間で、事前設定された変位量でおよび事前設定された変位方向に、前記画素の前記平面内で一定であることを特徴とする、請求項8に記載の画像取込装置。
【請求項10】
画像変位に対する画像センサおよび/または光学素子のうちの少なくとも1つの軌道上のデータを格納するためのメモリ手段を備えることを特徴とする、請求項8または9に記載の画像取込装置。
【図1a】

【図1b】
【図2a】
【図2b】
【図3】
【図1b】
【図2a】
【図2b】
【図3】
【公表番号】特表2009−538068(P2009−538068A)
【公表日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願番号】特願2009−511396(P2009−511396)
【出願日】平成19年5月22日(2007.5.22)
【国際出願番号】PCT/EP2007/004533
【国際公開番号】WO2007/134838
【国際公開日】平成19年11月29日(2007.11.29)
【出願人】(508347834)
【Fターム(参考)】
【公表日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願日】平成19年5月22日(2007.5.22)
【国際出願番号】PCT/EP2007/004533
【国際公開番号】WO2007/134838
【国際公開日】平成19年11月29日(2007.11.29)
【出願人】(508347834)
【Fターム(参考)】
[ Back to top ]