
空隙量測定装置及び空隙量測定方法
【課題】着用物の種別に関わらず身体との間の空隙量を正確に測定することのできる空隙量測定装置及び空隙量測定方法を提供すること。
【解決手段】空隙量測定装置1は、人体模型20を載置する台座部12及び測定対象物に対してレーザー光を投光することで当該測定対象物までの距離を測定するセンサ部11を備える距離測定装置10と、センサ部11のレーザー光を透過する部材で構成され、上部が開口するとともにその内部が空洞状に形成された人体模型20と、距離測定装置10が測定した距離から着用物と人体模型との間の空隙量を算出する演算装置30と、を備える。このとき、センサ部11は、人体模型20の内部から当該人体模型20に着用された着用物の着用面に対してレーザー光を投光することで着用面までの距離を測定し、演算装置30は、着用物の着用面までの距離から空隙量を算出する。
【解決手段】空隙量測定装置1は、人体模型20を載置する台座部12及び測定対象物に対してレーザー光を投光することで当該測定対象物までの距離を測定するセンサ部11を備える距離測定装置10と、センサ部11のレーザー光を透過する部材で構成され、上部が開口するとともにその内部が空洞状に形成された人体模型20と、距離測定装置10が測定した距離から着用物と人体模型との間の空隙量を算出する演算装置30と、を備える。このとき、センサ部11は、人体模型20の内部から当該人体模型20に着用された着用物の着用面に対してレーザー光を投光することで着用面までの距離を測定し、演算装置30は、着用物の着用面までの距離から空隙量を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人体模型に着用された着用物と当該人体模型との間の空隙量を測定する空隙量測定装置及び空隙量測定方法に関する。
【背景技術】
【0002】
身体から排泄される尿や経血などの液体を吸収するものとして、生理用ナプキンやおりもの用シートなどの吸収性物品が広く知られている。このような吸収性物品では、身体との間に隙間が生じると漏れの原因となるため、着用時の隙間を適切に把握する仕組みが求められる。
【0003】
ここで、身体と衣服との間の隙間を測定する試みとしては、例えば、非特許文献1に記載された方法が知られている。この非特許文献1では、人体模型の外表面の3次元形状と、人体模型に衣服を着用させたときの外表面の3次元形状と、を計測し、両形状の差分を算出することで、身体と衣服との隙間を測定することとしている。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】山本 真理子、「パンツの間隙量と衣服圧、着用感の関係」、東京都立産業技術研究センター 研究報告第4号(平成13年度)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、外表面の形状から空隙量を測定する非特許文献1の方法では、生理用ナプキンのように他の衣服を重ねて使用する着用物や、オムツのように厚さを無視できない着用物の空隙量を測定する際に誤差が生じてしまい、正確な空隙量を測定することができない。
【0006】
そこで、本発明では、着用物の種別に関わらず身体との間の空隙量を正確に測定することのできる空隙量測定装置及び空隙量測定方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、人体模型に着用された着用物と前記人体模型との間の空隙量を測定する空隙量測定装置であって、光束を透過する部材で構成され、上部が開口するとともにその内部が空洞状に形成された人体模型と、前記人体模型を載置する台座部、及び対象物に対して光束を投光することで当該対象物までの距離を測定するセンサ部を備える距離測定装置と、前記距離測定装置が測定した距離に基づいて前記空隙量を算出する演算装置と、を備え、前記距離測定装置は、前記センサ部により前記人体模型の内部から当該人体模型に着用された着用物の着用面に対して前記光束を投光することで前記着用面までの距離を測定し、前記演算装置は、前記センサ部により測定された前記着用面までの距離と、前記センサ部により測定された前記人体模型までの距離と、に基づいて前記空隙量を算出する空隙量測定装置に関する。
【0008】
このとき、前記センサ部は、前記台座部の上方に設置され、前記人体模型の開口から前記光束を投光することで、前記着用物の着用面に対して前記光束を投光することが好ましい。
【0009】
また、前記人体模型は、所定の線径及び網目寸法を有するステンレス製の金網で構成されることが好ましい。
【0010】
また、前記人体模型は、水平面及び前記水平面に対して所定角度で立ち上がった側面を有し、前記距離測定装置は、前記センサ部による前記光束の投光角度を変更可能な角度調節部を備え、前記演算装置は、前記人体模型の前記側面までの距離を、前記センサ部が測定した距離及び前記投光角度に基づいて演算することが好ましい。
【0011】
また、本発明は、上記空隙量測定装置を用いて人体模型に着用された着用物と前記人体模型との間の空隙量を測定する空隙量測定方法であって、前記人体模型に前記光束を反射する反射シートを貼付した状態で前記人体模型までの距離を測定する工程と、前記人体模型から前記反射シートを剥がした状態で前記着用面までの距離を測定する工程と、前記人体模型までの距離と前記着用面までの距離とに基づいて前記空隙量を算出する工程と、を含む空隙量測定方法に関する。
【発明の効果】
【0012】
本発明によれば、着用物の外表面の形状(距離)ではなく、着用物の着用面の形状(距離)を用いて空隙量を算出するため、着用物の種別に関わらず身体との間の空隙量を正確に測定することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の空隙量測定装置の構成を示す図である。
【図2】距離測定装置のセンサ部の投光角度の変更を示す図である。
【図3】人体模型の外観を示す図である。
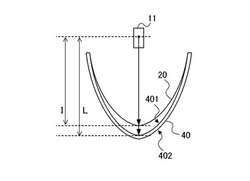
【図4】空隙量測定装置による空隙量測定を模式的に示す図である。
【図5】距離測定装置による距離の測定を模式的に示す図である。
【図6】センサ座標系から全体座標系への変換の例を示す図である。
【図7】空隙量測定装置により測定した空隙量の分布を示す図である。
【図8】実施例で用いた試料の形状を示す図である。
【図9】実施例で用いた試料の分割領域を示す図である。
【図10】実施例の測定結果を示すグラフである。
【発明を実施するための形態】
【0014】
以下、本発明の空隙量測定装置1の好ましい実施形態について、図面を参照しながら説明する。
【0015】
[空隙量測定装置1の構成]
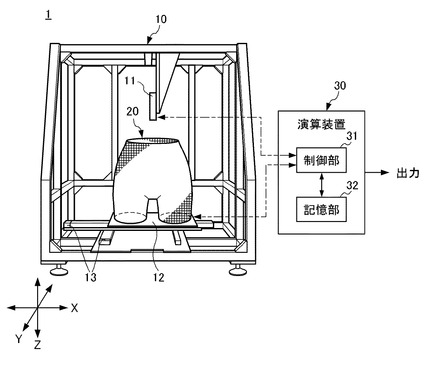
本発明の空隙量測定装置1は、測定対象物までの距離、より詳細には当該距離から算出した測定対象物の3次元形状に基づいて、人体模型と着用物の着用面との間の空隙量を算出する。3次元形状の測定は、例えば、測定対象物に対して投光した所定のレーザー光(光束)の反射光を受光し、三角測距の原理で距離情報を得て、3次元データ化することで実現することができる。図1を参照して、本発明の空隙量測定装置1は、距離測定装置10と、人体模型20と、演算装置30と、を含んで構成される。
【0016】
距離測定装置10は、測定対象物の距離を測定する測定装置であり、センサ部11と、台座部12と、ガイド部13と、を含んで構成される。
【0017】
センサ部11は、点あるいは線状のレーザー光を投光することで、測定対象物までの距離を測定するレーザー距離計であり、本実施形態では、KEYENCE社製のLK−G500を用いることとしている。センサ部11は、距離情報を測定すると、当該距離情報を演算装置30の制御部31に出力する。
台座部12は、センサ部11により距離を測定する測定対象物を載置する土台であり、センサ部11の下方に設けられる。
【0018】
ここで、本実施形態では、レーザー光を用いて測定する測定対象物を立体形状の人体模型20としているため、測定対象物である人体模型20全体の表面形状を測定するためには、センサ部11や人体模型20を適宜移動する必要がある。
【0019】
そこで、距離測定装置10は、台座部12の移動を規制するガイド部13を備えることとしている。本実施形態では、ガイド部13は、台座部12を図中X方向(幅方向)及びY方向(奥行き方向)に移動可能に規制する。なお、ガイド部13の規制する移動方向は、X方向及びY方向に限られず、台座部12をZ方向(上下方向)に移動可能に規制することとしてもよい。
【0020】
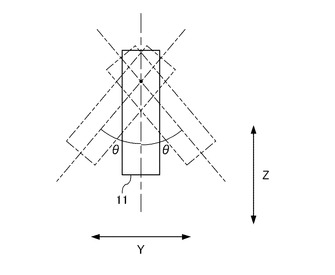
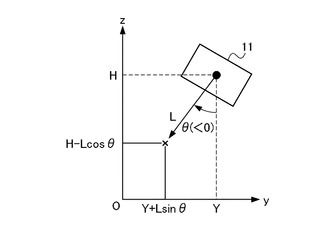
また、距離測定装置10は、図2に示すようにレーザー光の投光角度(俯角)を変更可能にセンサ部11を設置する。本実施形態では、センサ部11は、Y方向に所定の角度(Θ)までレーザー光を投光可能に設置されている。なお、センサ部11の変更可能な投光角度は、Y方向に限られず、X方向に所定の角度(Θ)まで投光可能に設置することとしてもよい。このようなセンサ部11の投光角度の変更は、角度調節部(図示せず)を用いて行うことができる。また、センサ部11は、投光角度だけでなく、台座部12からの高さを変更可能に設置されることとしてもよい。このようなセンサ部11の高さの変更は、公知の高度調節部(図示せず)を用いて行うことができる。
【0021】
なお、センサ部11の投光角度や高さの変更、台座部12の移動は、手動又は演算装置30(制御部31)の制御に基づき自動で行うことができる。また、センサ部11の投光角度や高さ、台座部12の位置情報(XY座標)は、センサ部11が測定した距離情報とともに、演算装置30の制御部31に出力される。
【0022】
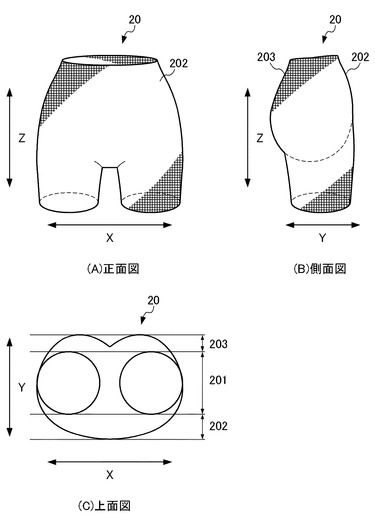
図3に示すように、人体模型20は、成人女性の立体腰部表面形状の人体模型である。ここで、本実施形態では、人体模型20に着用物を着用させた上で、人体模型20を透過したレーザー光を用いて着用物の着用面までの距離を測定することとしている。すなわち、センサ部11のレーザー光は、人体模型20の内部から着用物の着用面に投光される。そのため、人体模型20は、センサ部11のレーザー光を透過する部材で構成され、上部が開口するとともにその内部が空洞に形成されている。
なお、レーザー光を透過する部材については、任意の部材を用いることができ、例えば、所定の線径及び網目寸法の金網や、透明アクリル板を用いることができる。ただし、透明アクリル板を用いた場合には、レーザー光が透明アクリル板を透過する際に屈折してしまうため、金網を用いた方がより好適である。網目構造の場合には、レーザー光が線部で遮断されてしまうが、屈折による影響が少なく、高精度な形状を取得することができるためである。そこで、本実施形態では、線径0.8mm、網目寸法5.0mmのステンレス製の金網で作成した人体模型20を用いることとしている。
【0023】
このように立体腰部表面形状の人体模型20は、内部が空洞状であるため、内部表面は股部表面201と、腹部表面202と、尻部表面203と、を含んで構成されることになる(図3(C))。このとき、股部表面201は、略水平面であり、腹部表面202及び尻部表面203は、股部表面201から略垂直方向に立ち上がった側面である。
なお、本実施形態では、人体模型20は、腹側が前面を向くように台座部12に載せられているものとする。
【0024】
図1に戻り、演算装置30は、距離測定装置10が測定した距離に基づいて人体模型20と着用物との間の隙間(空隙量)を算出し、適宜出力する。このような演算装置30は、制御部31と、記憶部32と、図示しない入力部及び表示部などと、を含む一般的なコンピュータを用いることができる。なお、演算装置30は、距離測定装置10自体に設けることとしてもよく、また、距離測定装置10と通信可能に接続された別体の装置を用いることとしてもよい。
【0025】
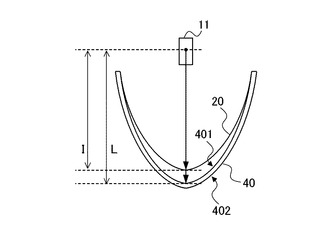
制御部31は、記憶部32に記憶されたプログラムに従い空隙量測定装置1全体を制御する。例えば、制御部31は、センサ部11から出力された距離情報及び投光角度と、台座部12の位置情報とに基づいて、人体模型20と着用物との間の隙間を算出する。すなわち、図4に示すように、センサ部11から着用物40の着用面401までの距離Lと、センサ部11から人体模型20までの距離Iと、の差分を算出することで、人体模型20と着用物40との間の隙間を算出する。より詳細には、制御部31は、距離Lから着用面401の3次元形状を測定するとともに、距離Iから人体模型20の3次元形状を測定し、両3次元形状を比較することで、人体模型20と着用物40との間の隙間を算出する。
このとき、本実施形態では、人体模型20を透過したレーザー光を着用物40の着用面401に投光することで、着用物40の外表面402ではなく着用面401までの距離Lを測定することとしている。これにより、着用物40の種別に関わらず人体模型20との間の隙間を正確に測定することができる。
【0026】
なお、レーザー光を透過する部材で構成される人体模型20までの距離Iは、任意の方法で測定することができ、例えば、記憶部32に予め記憶しておくこととしてもよく、また、人体模型20にレーザー光を反射する反射シートを貼付した上で、センサ部11を用いて測定することとしてもよい。このとき、反射シートは、厚さの無視できるものであることが好ましく、例えば、カラー粘着テープを用いることができる。貼付した反射シートは、着用面401までの距離Lの測定時には剥がすものとする。
【0027】
ここで、本実施形態では、図1に示すように、センサ部11を人体模型20の上方に設置し、人体模型20の開口からレーザー光を投光することとしているが、これに限られるものではなく、センサ部11の形状や大きさによっては、人体模型20の内部に配置することとしてもよい。
【0028】
記憶部32は、制御部31が実行する各種プログラムや制御部31の演算結果を記憶する。
【0029】
[3次元形状の測定方法]
以上、本発明の空隙量測定装置1の構成について説明した。続いて、図5及び図6を参照して、人体模型20や着用物40の着用面401の3次元形状の測定方法について説明する。なお、以下では、着用物40の着用面401の3次元形状の測定を例にとり説明するが、人体模型20の3次元形状の測定についても同様の方法により行うことができる。
【0030】
初めに、図5を参照して、着用物40の着用面401までの距離Lの具体的な測定方法について説明する。
略水平面の股部表面201に対しては、台座部12をX方向及びY方向に移動することで、上方に設置されたセンサ部11を用いて距離Lを測定することができる。他方、股部表面201から立ち上がった腹部表面202及び尻部表面203に対しては、上方に設置されたセンサ部11からレーザー光を投光することができず、X方向及びY方向に移動しただけでは、距離Lを測定することができない。そこで、センサ部11の投光角度をY方向に所定角度変更した上で、台座部12をY方向に移動したりセンサ部11をZ方向に移動したりすることで、腹部表面202及び尻部表面203までの距離Lを測定することとしている(必要があればX方向への変更を行うこととしてもよい)。
【0031】
センサ部11により測定された距離Lは、台座部12の位置情報(X,Y)やセンサ部11の高度情報(H)とともに演算装置30の制御部31に出力され、制御部31により3次元データ化されることで、3次元形状の測定が行われる。すなわち、制御部31は、センサ座標系(X,Y,L)を全体座標系(x、y、z)に変換することで、3次元形状を測定する。
【0032】
センサ座標系の全体座標系への変換は、図6や以下の式により行うことができる。
【数1】

【0033】
なお、本実施形態では、センサ部11の投光角度をY方向に変更可能にしているため、センサ座標系Xをそのまま全体座標系xとしているが、センサ部11の投光角度をX方向に変更可能にした場合には、センサ座標系Yから全体座標系yへの変換と同様にセンサ部11の投光角度Θを用いてセンサ座標系Xから全体座標系xへの変換を行う。
【0034】
[空隙量の測定]
続いて、本発明の空隙量測定装置1による空隙量の測定結果を図7に示す。図7では、吸収体(生理用ナプキン)を固着したショーツを人体模型20に着用させた際のショーツ及び吸収体(以下、単に「着用物」とする)と人体模型20との間の空隙量を測定している。なお、図7では、人体模型20と着用物との垂直方向(Z方向)の差分を空隙量として測定している。
【0035】
人体模型20の金網部分については、レーザー光が遮断されるため正確な空隙量を算出することができないものの、その他の部分(網目状の部分)については、人体模型20の表面形状と着用物の着用面の形状とから図7(A)に示すように空隙量分布を算出することができた。
このとき、吸収体が接触している領域に注目すると、吸収体の中央から腹側の領域(腹部表面202側)では空隙がほとんどない密着状態であるのに対し、背側の領域(尻部表面203側)では主に臀列において最大40mm程度の顕著な隙間があることが分かった。
また、前額面と平行な断面(E−E断面)では、吸収体が左右大腿部に挟まれることにより凸状に変形した結果、中央部に比べ端部の隙間が大きい様子なども測定することができた(図7(B))。
【0036】
以上のことから、本発明の空隙量測定装置1によれば、生理用ナプキンのように他の衣服と重ねて使用する着用物やオムツのように厚さを無視できない着用物のように、従来の方法では測定困難であった着用物の空隙量を正確に測定することができる。
【0037】
[空隙量測定装置1の効果]
以上の空隙量測定装置1によれば、以下のような効果を奏する。
【0038】
(1)空隙量測定装置1を、人体模型20を載置する台座部12及び測定対象物に対してレーザー光を投光することで当該測定対象物までの距離を測定するセンサ部11を備える距離測定装置10と、センサ部11のレーザー光を透過する部材で構成され、上部が開口するとともにその内部が空洞状に形成された人体模型20と、距離測定装置10が測定した距離から着用物の3次元形状を測定し、人体模型20の3次元形状と比較することで人体模型に着用された着用物と人体模型との間の空隙量を算出する演算装置30と、を備える構成とした。このとき、センサ部11は、人体模型20の内部から当該人体模型20に着用された着用物の着用面に対してレーザー光を投光することで着用面までの距離Lを測定し、演算装置30は、人体模型20の3次元形状と、着用物の着用面の3次元形状と、を比較することで、空隙量を算出することとした。
【0039】
これにより、着用物の外表面の形状ではなく、着用物の着用面の形状を用いて空隙量を算出することができ、着用物の種別に関わらず身体との間の空隙量を正確に測定することができる。
【0040】
(2)このとき、センサ部11は、台座部12の上方に設置され、人体模型20の開口からレーザー光を投光することで、着用物の着用面に対して光束を投光する構成とした。
これにより、人体模型20の空洞部分に設置することができない形状及び大きさのセンサであっても、正確な空隙量を測定することができる。
【0041】
(3)また、人体模型20は、所定の線径及び網目寸法を有するステンレス製の金網で構成することとした。
これにより、網目状の部分については人体模型20の部材によるレーザー光の屈折を考慮することなく、適切な空隙量を算出することができる。
【0042】
(4)また、距離測定装置10は、センサ部11によるレーザー光の投光角度(俯角)を変更可能な角度調節部を備え、演算装置30は、人体模型20(着用物)の内表面のうち、略水平面の股部表面201から略垂直方向に立ち上がった腹部表面202及び尻部表面203の形状をセンサ部11が測定した距離及びセンサ部11の投光角度に基づいて測定することとした。
これにより、人体模型20や着用物の着用面の3次元形状を適切に測定することができ、正確な空隙量を測定することができる。
【0043】
(5)また、本発明の空隙量測定方法は、このように構成される空隙量測定装置1を用いて、人体模型20にレーザー光を反射する反射シートを貼付した状態で人体模型20までの距離を測定する工程と、人体模型20から反射シートを剥がした状態で着用面までの距離を測定する工程と、人体模型20までの距離と着用面までの距離とに基づいて空隙量を算出する工程と、を行うこととした。
これにより、レーザー光を透過する部材で構成した人体模型20の距離や形状をセンサ部11のレーザー光を用いて測定することができ、結果として、正確な空隙量を測定することができる。
【0044】
以上、本発明の実施形態について説明したが、本発明は上述した実施形態に限るものではない。また、本発明の実施形態に記載された効果は、本発明から生じる最も好適な効果を列挙したに過ぎず、本発明による効果は、本発明の実施例に記載されたものに限定されるものではない。
【0045】
例えば、上記実施形態では、吸収体(生理用ナプキン)を固着したショーツと人体模型20との間の間隙量を測定しているが、これに限られるものではなく、本発明は、人体模型20に着用可能なその他の着用物に対して適用することができる。
【0046】
また、図7では、人体模型20と着用物との垂直方向(Z方向)の差分を空隙量として測定しているが、空隙量は、垂直方向の差分に限らず、測定する部位に応じて適宜設定可能である。
【実施例】
【0047】
続いて、本発明の空隙量測定装置1を用いた実施例に基づいて本発明をより詳細に説明する。なお、本発明はこれらの以下の実施例によって限定されるものではない。
【0048】
実施例では、後述の試料S1,S2,S3といった3種類の生理用ナプキンをショーツに固着した上で人体模型20に着用させ、人体模型20との間の間隙量を測定した。ここで、試料S1,S2,S3の3種類の生理用ナプキンの形状について、図8を参照して説明する。
【0049】
3種類の生理用ナプキン50は、長手方向21cm、幅方向9cmの一般的な形状の生理用ナプキンである。生理用ナプキン50は、表面材とバックシートとの間に吸収体501と補強紙502とが挟まれホットメルト型接着剤により接着されている。このとき、表面材には、吸収体501によりエンボス加工503が形成されている。吸収体501の吸収層は、粉砕パルプと高吸収ポリマー(SAP)とが混合され、親水性のティッシュペーパー(目付け15g/m2)で包まれている。
【0050】
表面材は、ポリエステル、ポリオレフィン系の30g/m2のスルーエアー不織布であり、バックシートは、23g/m2のポリエチレン樹脂製のフィルムである。また、表面材の両側に位置するサイドシート504は、15g/m2でポリプロピレンの繊維からなる不織布であり、補強紙502は、30g/m2である。
【0051】
このような形状の生理用ナプキン50において、試料S1,S2,S3では、吸収体501の目付け及び吸収体501の圧着の程度を異ならせることとした。
具体的には、試料S1は、粉砕パルプの目付け100g/m2、SAPの目付け10g/m2であり、試料S2,S3は、粉砕パルプの目付け300g/m2、SAPの目付け30g/m2である(試料S1の3倍)。また、試料S3は、試料S2に比べて2〜3倍程度の強い力をかけて吸収体501を圧着している。
【0052】
実施例では、このような試料S1,S2,S3を固着したショーツを人体模型20に着用させ、空隙量の測定を実施した。測定においては、目付けや圧着の程度の違いに加え、経血などで生理用ナプキンが膨潤した際の空隙量の違いも測定するため、何も吸収していない状態(乾燥状態)と、標準的な1日の経血量に相当する45gの水を吸収している状態(吸収状態)とで空隙量分布を測定した。
【0053】
[目付けによる影響]
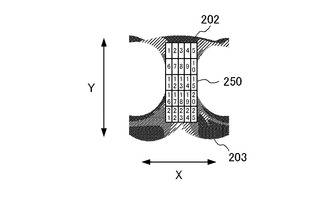
目付けが空隙量に与える影響を測定するため、夫々乾燥状態の試料S1,S2の空隙量を測定し、統計的検定を行った。このとき、空隙量の違いを詳細に検討するため、生理用ナプキンが装着されている領域を図9のように25分割し、分割された各領域の平均空隙量を求め、二元配置分散分析を行った。
図10(A)は、試料S1,S2の空隙量の測定結果を示すグラフである。多重比較の結果、生理用ナプキンの中央から腹側の領域で空隙が少なく、中央から尻側の領域で空隙が大きいという分布は、目付けの大小を問わず共通した特徴であるが、目付けが大きい試料S2では試料S1に比べて相対的に空隙が大きい傾向が見られた。より具体的には、試料S2は、領域18〜20及び領域23〜25において、試料S1に比べて空隙量が有意に大きいことが確認された。
このことから、空隙形成における目付けの影響は、主に臀裂周辺において現れ、その領域では目付けの増加に伴い空隙量が増加することが分かった。
【0054】
[圧着による影響]
圧着の程度が空隙量に与える影響を測定するため、夫々乾燥状態の試料S2,S3の空隙量を測定し、統計的検定を行った。このとき、空隙量の違いを詳細に検討するため、生理用ナプキンが装着されている領域を図9のように25分割し、分割された各領域の平均空隙量を求め、二元配置分散分析を行った。
図10(B)は、試料S2,S3の空隙量の測定結果を示すグラフである。多重比較の結果、臀裂周辺に見られる顕著な空隙は、圧着の程度を問わず共通した傾向であるが、生理用ナプキンの中央から腹側にかけては、圧着の程度による空隙量の差異が観察され、圧着の強い試料S3は、試料S2に比べ空隙が相対的に小さい傾向が見られた。より具体的には、領域8,9,13,14では、試料S2の方が試料S3よりも空隙が大きく、領域11,15では、試料S3の方が試料S2よりも空隙が大きいことが明らかになった。
領域8,9,13,14は、主に圧着により形成された表溝に囲まれた領域であり、一方、領域11,15は、主に大腿部近傍の表溝外側の領域であることから、表溝に囲まれた領域では、圧着の圧力が増すにつれて空隙が減少し、大腿部近傍の表溝外側の領域では空隙が増加することが分かった。
【0055】
[吸収の有無による影響]
吸収の有無が空隙量に与える影響を測定するため、乾燥状態及び吸収状態の試料S1,S2,S3の空隙量を測定し、統計的検定を行った。
図10(C)は、乾燥状態及び吸収状態の空隙量の測定結果を示すグラフである。多重比較の結果、いずれの試料S1,S2,S3においても乾燥状態に比べ吸収状態における空隙が相対的に小さい傾向が見られた。
なお、空隙量の違いを詳細に検討するため、生理用ナプキンが装着されている領域を図9のように25分割し、分割された各領域の平均空隙量を求め、二元配置分散分析を行ったが、吸収の有無と領域の交互作用において有意差はなく、吸収の有無に関する主効果において有意差が認められた。
このことから、生理用ナプキンの領域に関わらず、吸収状態では、乾燥状態に比べて空隙量が減少することが分かった。
【符号の説明】
【0056】
1 空隙量測定装置
10 距離測定装置
11 センサ部
12 台座部
13 ガイド
20 人体模型
30 演算装置
31 制御部
32 記憶部
【技術分野】
【0001】
本発明は、人体模型に着用された着用物と当該人体模型との間の空隙量を測定する空隙量測定装置及び空隙量測定方法に関する。
【背景技術】
【0002】
身体から排泄される尿や経血などの液体を吸収するものとして、生理用ナプキンやおりもの用シートなどの吸収性物品が広く知られている。このような吸収性物品では、身体との間に隙間が生じると漏れの原因となるため、着用時の隙間を適切に把握する仕組みが求められる。
【0003】
ここで、身体と衣服との間の隙間を測定する試みとしては、例えば、非特許文献1に記載された方法が知られている。この非特許文献1では、人体模型の外表面の3次元形状と、人体模型に衣服を着用させたときの外表面の3次元形状と、を計測し、両形状の差分を算出することで、身体と衣服との隙間を測定することとしている。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】山本 真理子、「パンツの間隙量と衣服圧、着用感の関係」、東京都立産業技術研究センター 研究報告第4号(平成13年度)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、外表面の形状から空隙量を測定する非特許文献1の方法では、生理用ナプキンのように他の衣服を重ねて使用する着用物や、オムツのように厚さを無視できない着用物の空隙量を測定する際に誤差が生じてしまい、正確な空隙量を測定することができない。
【0006】
そこで、本発明では、着用物の種別に関わらず身体との間の空隙量を正確に測定することのできる空隙量測定装置及び空隙量測定方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、人体模型に着用された着用物と前記人体模型との間の空隙量を測定する空隙量測定装置であって、光束を透過する部材で構成され、上部が開口するとともにその内部が空洞状に形成された人体模型と、前記人体模型を載置する台座部、及び対象物に対して光束を投光することで当該対象物までの距離を測定するセンサ部を備える距離測定装置と、前記距離測定装置が測定した距離に基づいて前記空隙量を算出する演算装置と、を備え、前記距離測定装置は、前記センサ部により前記人体模型の内部から当該人体模型に着用された着用物の着用面に対して前記光束を投光することで前記着用面までの距離を測定し、前記演算装置は、前記センサ部により測定された前記着用面までの距離と、前記センサ部により測定された前記人体模型までの距離と、に基づいて前記空隙量を算出する空隙量測定装置に関する。
【0008】
このとき、前記センサ部は、前記台座部の上方に設置され、前記人体模型の開口から前記光束を投光することで、前記着用物の着用面に対して前記光束を投光することが好ましい。
【0009】
また、前記人体模型は、所定の線径及び網目寸法を有するステンレス製の金網で構成されることが好ましい。
【0010】
また、前記人体模型は、水平面及び前記水平面に対して所定角度で立ち上がった側面を有し、前記距離測定装置は、前記センサ部による前記光束の投光角度を変更可能な角度調節部を備え、前記演算装置は、前記人体模型の前記側面までの距離を、前記センサ部が測定した距離及び前記投光角度に基づいて演算することが好ましい。
【0011】
また、本発明は、上記空隙量測定装置を用いて人体模型に着用された着用物と前記人体模型との間の空隙量を測定する空隙量測定方法であって、前記人体模型に前記光束を反射する反射シートを貼付した状態で前記人体模型までの距離を測定する工程と、前記人体模型から前記反射シートを剥がした状態で前記着用面までの距離を測定する工程と、前記人体模型までの距離と前記着用面までの距離とに基づいて前記空隙量を算出する工程と、を含む空隙量測定方法に関する。
【発明の効果】
【0012】
本発明によれば、着用物の外表面の形状(距離)ではなく、着用物の着用面の形状(距離)を用いて空隙量を算出するため、着用物の種別に関わらず身体との間の空隙量を正確に測定することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の空隙量測定装置の構成を示す図である。
【図2】距離測定装置のセンサ部の投光角度の変更を示す図である。
【図3】人体模型の外観を示す図である。
【図4】空隙量測定装置による空隙量測定を模式的に示す図である。
【図5】距離測定装置による距離の測定を模式的に示す図である。
【図6】センサ座標系から全体座標系への変換の例を示す図である。
【図7】空隙量測定装置により測定した空隙量の分布を示す図である。
【図8】実施例で用いた試料の形状を示す図である。
【図9】実施例で用いた試料の分割領域を示す図である。
【図10】実施例の測定結果を示すグラフである。
【発明を実施するための形態】
【0014】
以下、本発明の空隙量測定装置1の好ましい実施形態について、図面を参照しながら説明する。
【0015】
[空隙量測定装置1の構成]
本発明の空隙量測定装置1は、測定対象物までの距離、より詳細には当該距離から算出した測定対象物の3次元形状に基づいて、人体模型と着用物の着用面との間の空隙量を算出する。3次元形状の測定は、例えば、測定対象物に対して投光した所定のレーザー光(光束)の反射光を受光し、三角測距の原理で距離情報を得て、3次元データ化することで実現することができる。図1を参照して、本発明の空隙量測定装置1は、距離測定装置10と、人体模型20と、演算装置30と、を含んで構成される。
【0016】
距離測定装置10は、測定対象物の距離を測定する測定装置であり、センサ部11と、台座部12と、ガイド部13と、を含んで構成される。
【0017】
センサ部11は、点あるいは線状のレーザー光を投光することで、測定対象物までの距離を測定するレーザー距離計であり、本実施形態では、KEYENCE社製のLK−G500を用いることとしている。センサ部11は、距離情報を測定すると、当該距離情報を演算装置30の制御部31に出力する。
台座部12は、センサ部11により距離を測定する測定対象物を載置する土台であり、センサ部11の下方に設けられる。
【0018】
ここで、本実施形態では、レーザー光を用いて測定する測定対象物を立体形状の人体模型20としているため、測定対象物である人体模型20全体の表面形状を測定するためには、センサ部11や人体模型20を適宜移動する必要がある。
【0019】
そこで、距離測定装置10は、台座部12の移動を規制するガイド部13を備えることとしている。本実施形態では、ガイド部13は、台座部12を図中X方向(幅方向)及びY方向(奥行き方向)に移動可能に規制する。なお、ガイド部13の規制する移動方向は、X方向及びY方向に限られず、台座部12をZ方向(上下方向)に移動可能に規制することとしてもよい。
【0020】
また、距離測定装置10は、図2に示すようにレーザー光の投光角度(俯角)を変更可能にセンサ部11を設置する。本実施形態では、センサ部11は、Y方向に所定の角度(Θ)までレーザー光を投光可能に設置されている。なお、センサ部11の変更可能な投光角度は、Y方向に限られず、X方向に所定の角度(Θ)まで投光可能に設置することとしてもよい。このようなセンサ部11の投光角度の変更は、角度調節部(図示せず)を用いて行うことができる。また、センサ部11は、投光角度だけでなく、台座部12からの高さを変更可能に設置されることとしてもよい。このようなセンサ部11の高さの変更は、公知の高度調節部(図示せず)を用いて行うことができる。
【0021】
なお、センサ部11の投光角度や高さの変更、台座部12の移動は、手動又は演算装置30(制御部31)の制御に基づき自動で行うことができる。また、センサ部11の投光角度や高さ、台座部12の位置情報(XY座標)は、センサ部11が測定した距離情報とともに、演算装置30の制御部31に出力される。
【0022】
図3に示すように、人体模型20は、成人女性の立体腰部表面形状の人体模型である。ここで、本実施形態では、人体模型20に着用物を着用させた上で、人体模型20を透過したレーザー光を用いて着用物の着用面までの距離を測定することとしている。すなわち、センサ部11のレーザー光は、人体模型20の内部から着用物の着用面に投光される。そのため、人体模型20は、センサ部11のレーザー光を透過する部材で構成され、上部が開口するとともにその内部が空洞に形成されている。
なお、レーザー光を透過する部材については、任意の部材を用いることができ、例えば、所定の線径及び網目寸法の金網や、透明アクリル板を用いることができる。ただし、透明アクリル板を用いた場合には、レーザー光が透明アクリル板を透過する際に屈折してしまうため、金網を用いた方がより好適である。網目構造の場合には、レーザー光が線部で遮断されてしまうが、屈折による影響が少なく、高精度な形状を取得することができるためである。そこで、本実施形態では、線径0.8mm、網目寸法5.0mmのステンレス製の金網で作成した人体模型20を用いることとしている。
【0023】
このように立体腰部表面形状の人体模型20は、内部が空洞状であるため、内部表面は股部表面201と、腹部表面202と、尻部表面203と、を含んで構成されることになる(図3(C))。このとき、股部表面201は、略水平面であり、腹部表面202及び尻部表面203は、股部表面201から略垂直方向に立ち上がった側面である。
なお、本実施形態では、人体模型20は、腹側が前面を向くように台座部12に載せられているものとする。
【0024】
図1に戻り、演算装置30は、距離測定装置10が測定した距離に基づいて人体模型20と着用物との間の隙間(空隙量)を算出し、適宜出力する。このような演算装置30は、制御部31と、記憶部32と、図示しない入力部及び表示部などと、を含む一般的なコンピュータを用いることができる。なお、演算装置30は、距離測定装置10自体に設けることとしてもよく、また、距離測定装置10と通信可能に接続された別体の装置を用いることとしてもよい。
【0025】
制御部31は、記憶部32に記憶されたプログラムに従い空隙量測定装置1全体を制御する。例えば、制御部31は、センサ部11から出力された距離情報及び投光角度と、台座部12の位置情報とに基づいて、人体模型20と着用物との間の隙間を算出する。すなわち、図4に示すように、センサ部11から着用物40の着用面401までの距離Lと、センサ部11から人体模型20までの距離Iと、の差分を算出することで、人体模型20と着用物40との間の隙間を算出する。より詳細には、制御部31は、距離Lから着用面401の3次元形状を測定するとともに、距離Iから人体模型20の3次元形状を測定し、両3次元形状を比較することで、人体模型20と着用物40との間の隙間を算出する。
このとき、本実施形態では、人体模型20を透過したレーザー光を着用物40の着用面401に投光することで、着用物40の外表面402ではなく着用面401までの距離Lを測定することとしている。これにより、着用物40の種別に関わらず人体模型20との間の隙間を正確に測定することができる。
【0026】
なお、レーザー光を透過する部材で構成される人体模型20までの距離Iは、任意の方法で測定することができ、例えば、記憶部32に予め記憶しておくこととしてもよく、また、人体模型20にレーザー光を反射する反射シートを貼付した上で、センサ部11を用いて測定することとしてもよい。このとき、反射シートは、厚さの無視できるものであることが好ましく、例えば、カラー粘着テープを用いることができる。貼付した反射シートは、着用面401までの距離Lの測定時には剥がすものとする。
【0027】
ここで、本実施形態では、図1に示すように、センサ部11を人体模型20の上方に設置し、人体模型20の開口からレーザー光を投光することとしているが、これに限られるものではなく、センサ部11の形状や大きさによっては、人体模型20の内部に配置することとしてもよい。
【0028】
記憶部32は、制御部31が実行する各種プログラムや制御部31の演算結果を記憶する。
【0029】
[3次元形状の測定方法]
以上、本発明の空隙量測定装置1の構成について説明した。続いて、図5及び図6を参照して、人体模型20や着用物40の着用面401の3次元形状の測定方法について説明する。なお、以下では、着用物40の着用面401の3次元形状の測定を例にとり説明するが、人体模型20の3次元形状の測定についても同様の方法により行うことができる。
【0030】
初めに、図5を参照して、着用物40の着用面401までの距離Lの具体的な測定方法について説明する。
略水平面の股部表面201に対しては、台座部12をX方向及びY方向に移動することで、上方に設置されたセンサ部11を用いて距離Lを測定することができる。他方、股部表面201から立ち上がった腹部表面202及び尻部表面203に対しては、上方に設置されたセンサ部11からレーザー光を投光することができず、X方向及びY方向に移動しただけでは、距離Lを測定することができない。そこで、センサ部11の投光角度をY方向に所定角度変更した上で、台座部12をY方向に移動したりセンサ部11をZ方向に移動したりすることで、腹部表面202及び尻部表面203までの距離Lを測定することとしている(必要があればX方向への変更を行うこととしてもよい)。
【0031】
センサ部11により測定された距離Lは、台座部12の位置情報(X,Y)やセンサ部11の高度情報(H)とともに演算装置30の制御部31に出力され、制御部31により3次元データ化されることで、3次元形状の測定が行われる。すなわち、制御部31は、センサ座標系(X,Y,L)を全体座標系(x、y、z)に変換することで、3次元形状を測定する。
【0032】
センサ座標系の全体座標系への変換は、図6や以下の式により行うことができる。
【数1】
【0033】
なお、本実施形態では、センサ部11の投光角度をY方向に変更可能にしているため、センサ座標系Xをそのまま全体座標系xとしているが、センサ部11の投光角度をX方向に変更可能にした場合には、センサ座標系Yから全体座標系yへの変換と同様にセンサ部11の投光角度Θを用いてセンサ座標系Xから全体座標系xへの変換を行う。
【0034】
[空隙量の測定]
続いて、本発明の空隙量測定装置1による空隙量の測定結果を図7に示す。図7では、吸収体(生理用ナプキン)を固着したショーツを人体模型20に着用させた際のショーツ及び吸収体(以下、単に「着用物」とする)と人体模型20との間の空隙量を測定している。なお、図7では、人体模型20と着用物との垂直方向(Z方向)の差分を空隙量として測定している。
【0035】
人体模型20の金網部分については、レーザー光が遮断されるため正確な空隙量を算出することができないものの、その他の部分(網目状の部分)については、人体模型20の表面形状と着用物の着用面の形状とから図7(A)に示すように空隙量分布を算出することができた。
このとき、吸収体が接触している領域に注目すると、吸収体の中央から腹側の領域(腹部表面202側)では空隙がほとんどない密着状態であるのに対し、背側の領域(尻部表面203側)では主に臀列において最大40mm程度の顕著な隙間があることが分かった。
また、前額面と平行な断面(E−E断面)では、吸収体が左右大腿部に挟まれることにより凸状に変形した結果、中央部に比べ端部の隙間が大きい様子なども測定することができた(図7(B))。
【0036】
以上のことから、本発明の空隙量測定装置1によれば、生理用ナプキンのように他の衣服と重ねて使用する着用物やオムツのように厚さを無視できない着用物のように、従来の方法では測定困難であった着用物の空隙量を正確に測定することができる。
【0037】
[空隙量測定装置1の効果]
以上の空隙量測定装置1によれば、以下のような効果を奏する。
【0038】
(1)空隙量測定装置1を、人体模型20を載置する台座部12及び測定対象物に対してレーザー光を投光することで当該測定対象物までの距離を測定するセンサ部11を備える距離測定装置10と、センサ部11のレーザー光を透過する部材で構成され、上部が開口するとともにその内部が空洞状に形成された人体模型20と、距離測定装置10が測定した距離から着用物の3次元形状を測定し、人体模型20の3次元形状と比較することで人体模型に着用された着用物と人体模型との間の空隙量を算出する演算装置30と、を備える構成とした。このとき、センサ部11は、人体模型20の内部から当該人体模型20に着用された着用物の着用面に対してレーザー光を投光することで着用面までの距離Lを測定し、演算装置30は、人体模型20の3次元形状と、着用物の着用面の3次元形状と、を比較することで、空隙量を算出することとした。
【0039】
これにより、着用物の外表面の形状ではなく、着用物の着用面の形状を用いて空隙量を算出することができ、着用物の種別に関わらず身体との間の空隙量を正確に測定することができる。
【0040】
(2)このとき、センサ部11は、台座部12の上方に設置され、人体模型20の開口からレーザー光を投光することで、着用物の着用面に対して光束を投光する構成とした。
これにより、人体模型20の空洞部分に設置することができない形状及び大きさのセンサであっても、正確な空隙量を測定することができる。
【0041】
(3)また、人体模型20は、所定の線径及び網目寸法を有するステンレス製の金網で構成することとした。
これにより、網目状の部分については人体模型20の部材によるレーザー光の屈折を考慮することなく、適切な空隙量を算出することができる。
【0042】
(4)また、距離測定装置10は、センサ部11によるレーザー光の投光角度(俯角)を変更可能な角度調節部を備え、演算装置30は、人体模型20(着用物)の内表面のうち、略水平面の股部表面201から略垂直方向に立ち上がった腹部表面202及び尻部表面203の形状をセンサ部11が測定した距離及びセンサ部11の投光角度に基づいて測定することとした。
これにより、人体模型20や着用物の着用面の3次元形状を適切に測定することができ、正確な空隙量を測定することができる。
【0043】
(5)また、本発明の空隙量測定方法は、このように構成される空隙量測定装置1を用いて、人体模型20にレーザー光を反射する反射シートを貼付した状態で人体模型20までの距離を測定する工程と、人体模型20から反射シートを剥がした状態で着用面までの距離を測定する工程と、人体模型20までの距離と着用面までの距離とに基づいて空隙量を算出する工程と、を行うこととした。
これにより、レーザー光を透過する部材で構成した人体模型20の距離や形状をセンサ部11のレーザー光を用いて測定することができ、結果として、正確な空隙量を測定することができる。
【0044】
以上、本発明の実施形態について説明したが、本発明は上述した実施形態に限るものではない。また、本発明の実施形態に記載された効果は、本発明から生じる最も好適な効果を列挙したに過ぎず、本発明による効果は、本発明の実施例に記載されたものに限定されるものではない。
【0045】
例えば、上記実施形態では、吸収体(生理用ナプキン)を固着したショーツと人体模型20との間の間隙量を測定しているが、これに限られるものではなく、本発明は、人体模型20に着用可能なその他の着用物に対して適用することができる。
【0046】
また、図7では、人体模型20と着用物との垂直方向(Z方向)の差分を空隙量として測定しているが、空隙量は、垂直方向の差分に限らず、測定する部位に応じて適宜設定可能である。
【実施例】
【0047】
続いて、本発明の空隙量測定装置1を用いた実施例に基づいて本発明をより詳細に説明する。なお、本発明はこれらの以下の実施例によって限定されるものではない。
【0048】
実施例では、後述の試料S1,S2,S3といった3種類の生理用ナプキンをショーツに固着した上で人体模型20に着用させ、人体模型20との間の間隙量を測定した。ここで、試料S1,S2,S3の3種類の生理用ナプキンの形状について、図8を参照して説明する。
【0049】
3種類の生理用ナプキン50は、長手方向21cm、幅方向9cmの一般的な形状の生理用ナプキンである。生理用ナプキン50は、表面材とバックシートとの間に吸収体501と補強紙502とが挟まれホットメルト型接着剤により接着されている。このとき、表面材には、吸収体501によりエンボス加工503が形成されている。吸収体501の吸収層は、粉砕パルプと高吸収ポリマー(SAP)とが混合され、親水性のティッシュペーパー(目付け15g/m2)で包まれている。
【0050】
表面材は、ポリエステル、ポリオレフィン系の30g/m2のスルーエアー不織布であり、バックシートは、23g/m2のポリエチレン樹脂製のフィルムである。また、表面材の両側に位置するサイドシート504は、15g/m2でポリプロピレンの繊維からなる不織布であり、補強紙502は、30g/m2である。
【0051】
このような形状の生理用ナプキン50において、試料S1,S2,S3では、吸収体501の目付け及び吸収体501の圧着の程度を異ならせることとした。
具体的には、試料S1は、粉砕パルプの目付け100g/m2、SAPの目付け10g/m2であり、試料S2,S3は、粉砕パルプの目付け300g/m2、SAPの目付け30g/m2である(試料S1の3倍)。また、試料S3は、試料S2に比べて2〜3倍程度の強い力をかけて吸収体501を圧着している。
【0052】
実施例では、このような試料S1,S2,S3を固着したショーツを人体模型20に着用させ、空隙量の測定を実施した。測定においては、目付けや圧着の程度の違いに加え、経血などで生理用ナプキンが膨潤した際の空隙量の違いも測定するため、何も吸収していない状態(乾燥状態)と、標準的な1日の経血量に相当する45gの水を吸収している状態(吸収状態)とで空隙量分布を測定した。
【0053】
[目付けによる影響]
目付けが空隙量に与える影響を測定するため、夫々乾燥状態の試料S1,S2の空隙量を測定し、統計的検定を行った。このとき、空隙量の違いを詳細に検討するため、生理用ナプキンが装着されている領域を図9のように25分割し、分割された各領域の平均空隙量を求め、二元配置分散分析を行った。
図10(A)は、試料S1,S2の空隙量の測定結果を示すグラフである。多重比較の結果、生理用ナプキンの中央から腹側の領域で空隙が少なく、中央から尻側の領域で空隙が大きいという分布は、目付けの大小を問わず共通した特徴であるが、目付けが大きい試料S2では試料S1に比べて相対的に空隙が大きい傾向が見られた。より具体的には、試料S2は、領域18〜20及び領域23〜25において、試料S1に比べて空隙量が有意に大きいことが確認された。
このことから、空隙形成における目付けの影響は、主に臀裂周辺において現れ、その領域では目付けの増加に伴い空隙量が増加することが分かった。
【0054】
[圧着による影響]
圧着の程度が空隙量に与える影響を測定するため、夫々乾燥状態の試料S2,S3の空隙量を測定し、統計的検定を行った。このとき、空隙量の違いを詳細に検討するため、生理用ナプキンが装着されている領域を図9のように25分割し、分割された各領域の平均空隙量を求め、二元配置分散分析を行った。
図10(B)は、試料S2,S3の空隙量の測定結果を示すグラフである。多重比較の結果、臀裂周辺に見られる顕著な空隙は、圧着の程度を問わず共通した傾向であるが、生理用ナプキンの中央から腹側にかけては、圧着の程度による空隙量の差異が観察され、圧着の強い試料S3は、試料S2に比べ空隙が相対的に小さい傾向が見られた。より具体的には、領域8,9,13,14では、試料S2の方が試料S3よりも空隙が大きく、領域11,15では、試料S3の方が試料S2よりも空隙が大きいことが明らかになった。
領域8,9,13,14は、主に圧着により形成された表溝に囲まれた領域であり、一方、領域11,15は、主に大腿部近傍の表溝外側の領域であることから、表溝に囲まれた領域では、圧着の圧力が増すにつれて空隙が減少し、大腿部近傍の表溝外側の領域では空隙が増加することが分かった。
【0055】
[吸収の有無による影響]
吸収の有無が空隙量に与える影響を測定するため、乾燥状態及び吸収状態の試料S1,S2,S3の空隙量を測定し、統計的検定を行った。
図10(C)は、乾燥状態及び吸収状態の空隙量の測定結果を示すグラフである。多重比較の結果、いずれの試料S1,S2,S3においても乾燥状態に比べ吸収状態における空隙が相対的に小さい傾向が見られた。
なお、空隙量の違いを詳細に検討するため、生理用ナプキンが装着されている領域を図9のように25分割し、分割された各領域の平均空隙量を求め、二元配置分散分析を行ったが、吸収の有無と領域の交互作用において有意差はなく、吸収の有無に関する主効果において有意差が認められた。
このことから、生理用ナプキンの領域に関わらず、吸収状態では、乾燥状態に比べて空隙量が減少することが分かった。
【符号の説明】
【0056】
1 空隙量測定装置
10 距離測定装置
11 センサ部
12 台座部
13 ガイド
20 人体模型
30 演算装置
31 制御部
32 記憶部
【特許請求の範囲】
【請求項1】
人体模型に着用された着用物と前記人体模型との間の空隙量を測定する空隙量測定装置であって、
光束を透過する部材で構成され、上部が開口するとともにその内部が空洞状に形成された人体模型と、
前記人体模型を載置する台座部、及び対象物に対して光束を投光することで当該対象物までの距離を測定するセンサ部を備える距離測定装置と、
前記距離測定装置が測定した距離に基づいて前記空隙量を算出する演算装置と、
を備え、
前記距離測定装置は、前記センサ部により前記人体模型の内部から当該人体模型に着用された着用物の着用面に対して前記光束を投光することで前記着用面までの距離を測定し、
前記演算装置は、前記センサ部により測定された前記着用面までの距離と、前記センサ部により測定された前記人体模型までの距離と、に基づいて、前記空隙量を算出する、
空隙量測定装置。
【請求項2】
前記センサ部は、前記台座部の上方に設置され、前記人体模型の開口から前記光束を投光することで、前記着用物の着用面に対して前記光束を投光する、
請求項1に記載の空隙量測定装置。
【請求項3】
前記人体模型は、所定の線径及び網目寸法を有するステンレス製の金網で構成される、
請求項1又は2の何れかに記載の空隙量測定装置。
【請求項4】
前記人体模型は、水平面及び前記水平面に対して所定角度で立ち上がった側面を有し、
前記距離測定装置は、前記センサ部による前記光束の投光角度を変更可能な角度調節部を備え、
前記演算装置は、前記人体模型の前記側面までの距離を、前記センサ部が測定した距離及び前記投光角度に基づいて演算する、
請求項1〜3の何れかに記載の空隙量測定装置。
【請求項5】
請求項1〜4に記載の空隙量測定装置を用いて人体模型に着用された着用物と前記人体模型との間の空隙量を測定する空隙量測定方法であって、
前記人体模型に前記光束を反射する反射シートを貼付した状態で前記人体模型までの距離を測定する工程と、
前記人体模型から前記反射シートを剥がした状態で前記着用面までの距離を測定する工程と、
前記人体模型までの距離と前記着用面までの距離とに基づいて前記空隙量を算出する工程と、
を含む空隙量測定方法。
【請求項1】
人体模型に着用された着用物と前記人体模型との間の空隙量を測定する空隙量測定装置であって、
光束を透過する部材で構成され、上部が開口するとともにその内部が空洞状に形成された人体模型と、
前記人体模型を載置する台座部、及び対象物に対して光束を投光することで当該対象物までの距離を測定するセンサ部を備える距離測定装置と、
前記距離測定装置が測定した距離に基づいて前記空隙量を算出する演算装置と、
を備え、
前記距離測定装置は、前記センサ部により前記人体模型の内部から当該人体模型に着用された着用物の着用面に対して前記光束を投光することで前記着用面までの距離を測定し、
前記演算装置は、前記センサ部により測定された前記着用面までの距離と、前記センサ部により測定された前記人体模型までの距離と、に基づいて、前記空隙量を算出する、
空隙量測定装置。
【請求項2】
前記センサ部は、前記台座部の上方に設置され、前記人体模型の開口から前記光束を投光することで、前記着用物の着用面に対して前記光束を投光する、
請求項1に記載の空隙量測定装置。
【請求項3】
前記人体模型は、所定の線径及び網目寸法を有するステンレス製の金網で構成される、
請求項1又は2の何れかに記載の空隙量測定装置。
【請求項4】
前記人体模型は、水平面及び前記水平面に対して所定角度で立ち上がった側面を有し、
前記距離測定装置は、前記センサ部による前記光束の投光角度を変更可能な角度調節部を備え、
前記演算装置は、前記人体模型の前記側面までの距離を、前記センサ部が測定した距離及び前記投光角度に基づいて演算する、
請求項1〜3の何れかに記載の空隙量測定装置。
【請求項5】
請求項1〜4に記載の空隙量測定装置を用いて人体模型に着用された着用物と前記人体模型との間の空隙量を測定する空隙量測定方法であって、
前記人体模型に前記光束を反射する反射シートを貼付した状態で前記人体模型までの距離を測定する工程と、
前記人体模型から前記反射シートを剥がした状態で前記着用面までの距離を測定する工程と、
前記人体模型までの距離と前記着用面までの距離とに基づいて前記空隙量を算出する工程と、
を含む空隙量測定方法。
【図1】

【図2】
【図3】
【図4】
【図5】

【図6】
【図7】

【図8】

【図9】
【図10】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−72734(P2013−72734A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−211606(P2011−211606)
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000115108)ユニ・チャーム株式会社 (1,219)
【出願人】(504180239)国立大学法人信州大学 (759)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000115108)ユニ・チャーム株式会社 (1,219)
【出願人】(504180239)国立大学法人信州大学 (759)
【Fターム(参考)】
[ Back to top ]