
立体映像表示装置の立体スケール像形成装置
【課題】立体カメラで撮影した立体映像の任意の位置に存在する対象物について、奥行き、幅、高さなどの計測を容易にする立体スケールを形成して立体映像表示装置に表示させる。
【解決手段】互いに光軸が交差するように配置した第1の撮像装置1と第2の撮像装置2と、立体画像表示装置4とを備えて、第1の撮像装置と第2の撮像装置それぞれの映像の中に長さ目盛を付した立体スケールの画像を形成し、立体スケールの視線交差角αと長さ目盛の大きさとを調整して立体画像表示装置4に表示し、映像中の立体スケールを立体視させる立体スケール像演算装置5と、表示された立体スケール11の位置を前記映像中で移動させる操作端を設けた操作盤6とを備える。
【解決手段】互いに光軸が交差するように配置した第1の撮像装置1と第2の撮像装置2と、立体画像表示装置4とを備えて、第1の撮像装置と第2の撮像装置それぞれの映像の中に長さ目盛を付した立体スケールの画像を形成し、立体スケールの視線交差角αと長さ目盛の大きさとを調整して立体画像表示装置4に表示し、映像中の立体スケールを立体視させる立体スケール像演算装置5と、表示された立体スケール11の位置を前記映像中で移動させる操作端を設けた操作盤6とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、立体撮像装置で取得する画像を表示する立体映像表示装置において、画像に表示された物体の実寸法を推定するために使用する立体スケール像を形成する装置に関する。
【背景技術】
【0002】
近年、立体映像表示装置は著しく発達してきている。立体映像表示装置では、たとえば、左右一対の撮像手段を視差を持つように配置し、撮像された左右一対の画像をモニターに表示して立体視化する。立体視には、左右画像を時分割で交互に表示し、液晶シャッターを備えたメガネで左右画像を交互に観察する時間分割立体表示方式や、左右画像をそれぞれ偏光軸が直交する偏光フィルタを通した上で、同一面に重ねて偏光表示し、左右で偏光軸が直交する偏光フィルタメガネを用いて左右画像に分離する偏光フィルタ眼鏡方式など、各種の原理に基づく装置が利用されている。なお、裸眼で立体映像を観察することができる方法も開発されている。
【0003】
映像の立体視化により、被写体に対する識別力が格段に向上する。この利点を使って、2次元画像では自動判定が難しかった侵入者の識別を試みた例が報告されている。また、特に立体内視鏡カメラが使用できれば、内蔵疾患の診断や手術を支援する上で大きな効果が期待される。
さらに、立体映像中の物体の寸法を簡単に知ることができれば、的確な診断や手術に大きく貢献することになる。
【0004】
しかし、立体内視鏡カメラから得られる映像は、形状と配置、色が主な情報で、映し出される映像の大きさに関する情報は、直接に得ることはできず、表示映像内に映し込まれた予め寸法を知っている鉗子など比較対象物に基づいて得ることになる。しかし、比較対象物との位置関係は必ずしも正確に求めることができないので、映像中の対象物についての大きさや距離に関する情報は確実性がない。
【0005】
立体カメラによる撮影方法には平行法と交叉法がある。特に立体内視鏡においては、立体視化する2台のカメラの間隔が小さいため、平行法による場合は視線交差角が小さくなって立体感に乏しくなる。一方、立体内視鏡を使う目的からすると、観察可能な領域が広く立体感が高いことが好ましい。そこで、立体内視鏡では、普通、交叉法を使った広角レンズにより撮像した映像を立体視化することで、視野を広げ、かつ奥行き方向の距離を大きく表示できるようにしている。
このような、交叉法により撮影した映像を対象として距離画像を生成する手法は、実現していない。また、立体映像表示装置において、立体表示された映像の距離や寸法を取得する簡便な手法は、未だ知られていない。
【0006】
立体内視鏡装置を用いた診断あるいは手術においては、術者が、立体内視鏡カメラにより撮影して表示された立体映像に映し出された患部を立体的に観察して、たとえば、患部の形状や周囲の状況、色などを診断の重要な判断材料とする。しかし、患部の奥行き寸法を正確に推定する手段がなく、立体映像として奥行きを感じさせる立体映像は得られるものの、その寸法は、過去の経験に基づいて類推するしか方法がなかった。また、患部の大きさも、鉗子など一緒に映像に写し込まれた比較対象物により推定するしかないが、位置関係が明確でなく正確に推定することができなかった。
なお、このような事情は、立体内視鏡装置に限らず、一般に用いられる交差法立体カメラを使用した立体映像表示装置においても、同様に、映像中の事物の寸法を正確に求めることが難しい。
【0007】
特許文献1には、計測用目盛発生回路により最適なサイズの計測用目盛をモニター上に描画するようにした立体撮像装置が記載されている。特許文献1に開示された計測用目盛発生回路は、平行法に従って配置された立体カメラを対象として、別途測定される被検物までの距離にしたがって映像の倍率を求め、倍率に対応する目盛を発生させる。
特許文献1に記載された立体撮像装置では、観察したい被検物を画像中心部に持ってくると、新しく提供された立体計測装置により被検物までの距離が自動的に測定され、測定された距離に従い被写体の撮影倍率に対応した計測用目盛が形成されて、形成された計測用目盛がモニター画面に自動的に表示されるようになっている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2007−187590号公報(特に、段落0027、0030等)
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、特許文献1記載の目盛表示は、平行法に従って配置された立体カメラを対象として、画像中心部に持ってきた被検物のみに目盛が合うので、別の被検物について寸法を知ろうとすると、その度にカメラを移動して被検物が画像中心部に来るようにして測定する必要がある。
そこで、本発明が解決しようとする課題は、立体カメラで撮影した立体映像の任意の位置に存在する対象物について、その奥行き(距離)、幅、高さなど長さに関する計測を容易にする立体スケールを形成して立体映像表示装置に表示させる立体スケール像形成装置を提供することである。
【0010】
特に、立体内視鏡装置において、画像表示装置に映し出される対象物の立体的な大きさを数値的に表現するための立体スケールを形成表示する立体スケール像形成装置を提供することである。術者は、立体スケールを利用して対象物の実際の大きさを知って、診断あるいは手術を行うことができる。
【課題を解決するための手段】
【0011】
上記課題を解決するため、第1の撮像装置と第2の撮像装置と、立体画像表示装置とを備えた立体映像表示装置における、本発明に係る立体スケール像形成装置は、第1の撮像装置と第2の撮像装置それぞれの映像の中に長さ目盛を付した立体スケールの画像を形成し、映像における立体スケールの位置と第1および第2の撮像装置の主点面との距離に従って、立体スケールの視線交差角と長さ目盛の大きさとを調整して立体画像表示装置に表示し、映像中の立体スケールを立体視させる立体スケール像形成装置と、表示された前記立体スケールの位置を前記映像中で移動させる操作端を設けた操作盤とを備えることを特徴とする。
【0012】
立体映像表示装置に用いられる立体カメラは、画角等を使用用途に合わせたレンズを使用し、種類も多い。また、同じ品番の部品を使用しても光学的特性が微妙に異なることも多く、調整により光学的特性が変化する場合もある。さらに、立体カメラの特性や使用用途に合った調整(コンバージェンスなど)を行う必要がある。そのため使用レンズ、撮影条件ごとに基準を設定する必要がある。本発明の立体撮像装置における第1の撮像装置と第2の撮像装置は、交差法を用いて、互いに光軸が交差するように配置したものであってもよい。
本発明の1態様に係る立体スケール像形成装置は、交差法を用いた立体カメラの光軸交差角である輻輳角に対応した映像深度に、実物に対応する大きさを持った長さ目盛を備えた立体スケールを画像中に表示するので、撮像装置から同じ距離にある被写体の奥行き(距離または長さ)、水平方向の長さ(幅)、垂直方向の高さ(長さ)を知ることができる。
また、立体スケールは適宜の位置に表示することができ、立体スケールの表示位置と第1および第2の撮像装置の主点面との距離に従って目盛を調整することにより、適宜の位置に撮像された被写体に適用することができる立体スケールを表示することができるので、被写体の実際の大きさを容易に推定することができる。
【0013】
さらに、看者は、操作盤を用いて、簡単に立体スケールの表示位置あるいは姿勢を調整することができる。看者は、対象とする被写体と立体スケールが表示された映像を観察しながら被写体の深度に立体スケールの深度を合わせて、表示された目盛を使って実物の大きさを測定する。操作盤には、直交座標系の3軸、あるいはさらに3個の回転軸を加えた6軸の運動を指定する操作端に加えて、1操作で直ちに基準位置に戻すことができる操作端を備えることが便利である。立体スケールの基準位置は、2つの撮影装置の光軸の交差点すなわちコンバージェンス点であることが好ましい。
【0014】
立体カメラが映し出す映像にオーバーライドされる立体スケールのマンマシンインターフェースとしての操作盤は、簡便に操作できるものであることが好ましい。たとえば、術者の指示で補助者が簡単に操作したり、収録された立体映像を後日分析する場合に簡便に操作したりできることが要求される。特に、観察対象物の形状や向きがあらかじめ特定できないことを考慮し、本発明における操作盤は、ローカル座標系に基づく操作により各軸ごとに指定することにより、立体スケールの目盛を移動・回転させることができることが好ましい。また、用途によっては各軸同士を拘束して使用することが必要な場合があるので、対象とする軸を操作することで各軸が連動するように構成してもよい。
【0015】
立体画像表示装置の画像に表示する立体スケールは、対象位置に設置した基準立体スケールを立体撮像装置で撮影して得られた映像に基づいて、目盛を実際の寸法と対比して校正したデータを集積して校正マトリックスとして記憶装置に記憶し、記憶された校正マトリックスに基づいて形成して表示することができる。
なお、位置や姿勢の変更に伴い、立体スケールの目盛の大きさを計算で求めることができる。一方、立体スケールの使われる領域について、その領域をカバーする点位置について、予め計算あるいは基準パターン実写像との対比により、目盛に振り直すことができるデータを形成しておいて、校正マトリックスとして記憶装置に格納しておくことができる。
目盛パターンを実写して、目盛パターンの実写像と立体スケール像の目盛とを対比させて較正する場合は、校正マトリックスを用いて、実態に沿った立体スケールを簡単に形成することができる。校正マトリックスの値をそのまま利用できないときは、内挿法あるいは外挿法を使用して補完することができる。
【発明の効果】
【0016】
本発明に係る立体映像表示装置の立体スケール像形成装置が被写体の位置に立体スケールを生成するので、看者は、立体スケールを参照して立体映像に表された被写体の寸法を正確に計測することができる。
特に、立体内視鏡装置を用いて患部の観察や手術を行うときには、本発明に係る立体スケール像形成装置を用いることにより、術者が画像中に表示された患部などの寸法を簡単に知ることができるので便利である。
【図面の簡単な説明】
【0017】
【図1】本発明の1つの実施形態に係る立体スケール像形成装置を用いた立体映像表示装置の構成図である。
【図2】人の目による立体視の原理を説明する概念図である。
【図3】立体画像表示装置の映像中における対象物の画像の表示位置を示す概念図である。
【図4】本実施形態に係る立体スケールの配置と立体カメラの視線との関係を示す概念図である。
【図5】本実施形態に係る立体スケールの位置と立体画像表示装置における表示位置の関係を説明する概念図である。
【図6】本実施形態に係る立体スケール像形成装置に用いる操作盤の1例を示す斜視図である。
【図7】本実施形態に係る立体スケールの各軸の移動状況を説明する概念図である。
【図8】本実施形態に係る基準立体スケールの作成方法の1例を示す概念図である。
【図9】本実施形態におけるレンズ系の幾何学歪みの補正方法を説明する概念図である。
【図10】本実施形態におけるレンズ系の幾何学歪みの補正に使用する校正データマトリクスを示す概念図である。
【図11】本実施形態に係る立体スケール像形成装置を立体内視鏡装置に適用した場合の例を示す立体映像表示装置の構成図である。
【発明を実施するための形態】
【0018】
以下、本発明に係る立体映像表示装置の立体スケール像形成装置について、図面を参照しながら詳しく説明する。なお、図面においては、同じ機能を有する構成部材については同じ参照番号を付して説明を簡約にし、説明の重複を避けるようにした。
【0019】
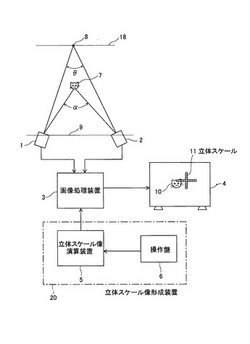
図1は、本発明の1つの実施形態に係る立体スケール像形成装置を用いた立体映像表示装置の構成図である。第1の撮像装置1と第2の撮像装置2は、ほぼ同じ性能を有するカメラで、固定の光軸間距離をおいて結合され、光軸が前方の決められたコンバージェンスポイント8で交差するように配置されている。また、コンバージェンスポイント8を通り、2つの撮像装置の主点同士を結ぶ直線9と2本の光軸を含む面に垂直な面をコンバージェンス面18という。なお、対象物上の1点を見通す2個の撮像装置の視線が交差して形成される角度を視線交差角αという。また、コンバージェンスポイント8に対する視線交差角を特に輻輳角θとよぶ。
【0020】
第1の撮像装置1と第2の撮像装置2が形成した映像信号は、画像処理装置3に入力される。画像処理装置3は、撮像装置1,2から入力された映像信号を立体画像表示装置4に右目用と左目用に分離して表示させる。図においては、第1の撮像装置1から供給される映像信号は左目で見る画像を表示するもの、第2の撮像装置2から供給される映像信号は右目で見る画像を表示するものである。
【0021】
立体画像表示装置4は、右目用画像と左目用画像を交互に切り換え表示し、これと同期してオンオフする液晶シャッタメガネなど図示しない専用の立体メガネで観察する時間分割立体表示方式の立体画像表示装置であれば、色彩の再現性も確保できるので好ましい。また、左右の画像を偏光軸が直交する偏光フィルタを通してプロジェクタ投射したりして同一画面に重ねて表示し、偏光フィルタ眼鏡で左目用画像と右目用画像に分離する偏光フィルタ眼鏡方式や、立体画像表示装置と立体メガネの機能を共に備えたオーバーヘッドディスプレイ(OHD)などを使うこともできる。
なお、特に、術者が患部の観察や手術を行うために使用する立体映像表示装置では、患部の色彩も重要な情報であるため、立体視のために映像の色彩が変化する方式は好ましくない。
【0022】
立体スケール像演算装置5は、立体スケールの左目用と右目用の画像信号を形成して、画像処理装置4に供給する。画像処理装置4で、立体スケール画像信号の左目用信号が第1の撮像装置1の映像信号と重畳され、右目用信号が第2の撮像装置2の映像信号に重畳されて、立体画像表示装置4に送信され表示される。
こうして、立体画像表示装置4に、対象とする物体7の立体映像10と立体スケール11が表示され、立体メガネを装着して観察するとこれらの映像を立体視することができる。
【0023】
立体スケール像演算装置5には、人が操作する操作盤6が付属して、画像中の立体スケール11の位置と姿勢を指定することができる。立体スケール像形成装置20は、立体スケール像演算装置5と操作盤6により、構成される。操作盤6を用いて、対象物7の立体映像10の位置に立体スケール11の像が重なるように調整すれば、立体スケール11の目盛を読み取ることにより、対象物7の寸法を測定することができる。
なお、対象物の映像10において垂直や水平の方向でない斜行した方向について寸法を知りたいときには、操作盤6により立体スケール11を適宜の軸について回転させて目盛を測定方向に沿うようにさせることにより、直接対象物の映像10に当てて寸法を測定できるようにすればよい。
【0024】
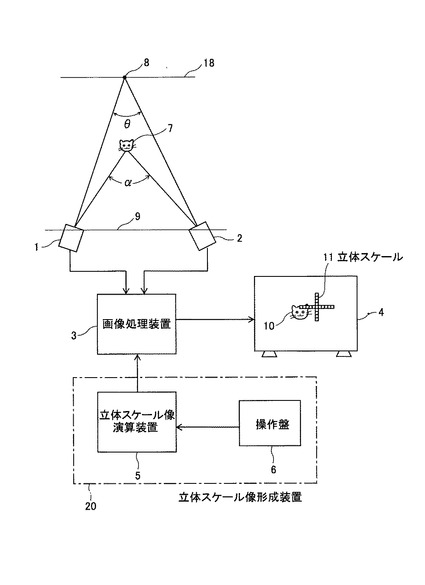
図2は、人の目による立体視の原理を説明する概念図である。図は、立体カメラで距離の異なる対象物を観察する場合を示している。図3は、立体画像表示装置4の映像中における対象物画像の表示位置を示す概念図である。右目で見る画像を実線で、左目で見る画像を点線で囲んで示している。
人の左目に擬せられる第1の撮像装置1と、右目に擬せられる第2の撮像装置2は、交差法を使って立体視を可能とする。
【0025】
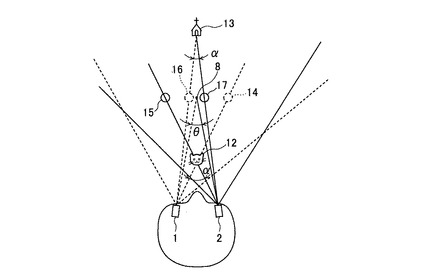
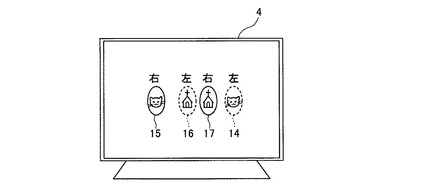
図2において、撮像装置の光軸が交差するコンバージェンスポイント8より撮像装置に近い位置に存在する対象物(猫)12は、第1の撮像装置1で生成された左目用の画像14が、図3に点線で示すように立体画像表示装置4の中心より右側に表示され、第2の撮像装置2で生成された右目用の画像15が、実線で示すように立体画像表示装置4の中心より左側に表示される。これらの画像を立体メガネにより立体視することにより、対象物12は、立体画像表示装置4の映像中に実際の空間における対象物12の位置にあるように観察される。
【0026】
一方、コンバージェンスポイント8より遠方にある対象物(教会)13は、近い位置にある対象物12とは逆に、左目用の画像16が点線で示されるように立体画像表示装置4の中心より左側に表示され、右目用の画像17が実線で示されるように立体画像表示装置4の中心より右側に表示されて、立体視することにより、2つの撮像装置の画像を見る視線の交点となる、実際の空間における対象物13の位置にあるように観察される。
【0027】
このように、撮像装置1,2と対象物との距離がコンバージェンス面より近い場合は、立体画像表示装置4に表示される左目用画像14が右目用画像15より右に表示され、撮像装置1,2と対象物との距離がコンバージェンス面より遠い場合は、立体画像表示装置4に表示される左目用画像16が右目用画像17より左に表示される。さらに、対象物が近いほど視線交差角αが大きく、遠いほど視線交差角αが小さくなり、対象物の画像の大きさは距離に反比例する。
【0028】
立体スケールについても、映像空間内の立体スケールの位置に対応して同じことが言える。すなわち、立体画像表示装置4において立体スケール11を立体視する場合の立体スケール像の配置位置までの距離は、左目用画像と右目用画像の左右配置と視線交差角αを決めることにより確定されることになる。なお、視線交差角αは、立体スケール中のある1点を見通す時の第1の撮像装置1の視線と第2の撮像装置2の視線が交差する角であるため、立体画像表示装置4において、コンバージェンス面に投影された左目用画像と右目用画像の間の距離に関係する量となる。
【0029】
図4は、本実施形態に係る立体スケールの配置と立体カメラの視線との関係を示す概念図、図5は、本実施形態に係る立体スケールの位置と立体画像表示装置における表示位置の関係を説明する概念図である。
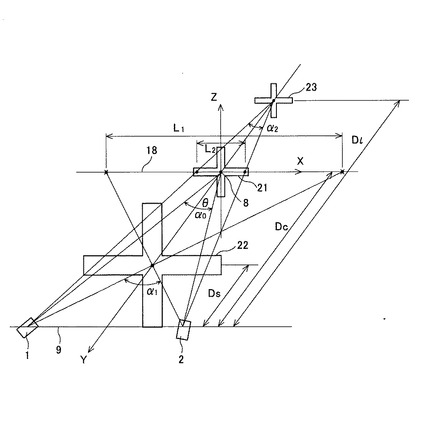
図4は、立体画像表示装置に表示する立体スケールを立体的に表示した概念図である。図4では、立体スケールの中心に原点を置くローカル座標系について、水平軸をX軸、奥行き方向の軸をY軸、垂直軸をZ軸として表現し、位置の異なる立体スケール相互間の関係、特に奥行き関係を明確に示すようにした。このため、図4では、立体スケール21,22,23は、撮像装置の中間点とコンバージェンスポイント8を結ぶ絶対座標系のY軸上に置かれている。
【0030】
図4に示すように、第1の撮像装置1の光軸と第2の撮像装置2の光軸が交わって形成するコンバージェンスポイント8の位置に、2つの光軸を含む面に垂直なコンバージェンス面18が存在する。このコンバージェンス面18に基準立体スケール21が形成される。基準立体スケール21は、光軸の交差角と同じ輻輳角θ(α0)を有する。基準立体スケール21の目盛は、実寸、あるいは決まった縮尺で表示される。ここで、第1の撮像装置1と第2の撮像装置2のたとえば主点同士を結ぶ基準線9からコンバージェンス面18までの距離をDcとする。
なお、立体スケールは、方眼を形成した面や、図4に示すような目盛棒を直交させた十字など、適宜のものであっても良い。
【0031】
立体スケール22は、コンバージェンス面18より立体カメラに近い位置に配置されたときの立体スケールである。ここで、第1の撮像装置1と第2の撮像装置2を結ぶ基準線9から立体スケール22までの距離をDsとすると、立体スケール22の目盛の大きさは、基準立体スケール21の目盛のDc/Ds倍になる。
なお、基準線9から立体スケール22までの距離は、先に述べた通り、立体画像表示装置4において、立体スケール22の左目用画像と右目用画像の左右配置関係と視線交差角α1、あるいは、コンバージェンス面18に投影された左目用画像と右目用画像の間の距離L1に関係する量として、算出することができる。
【0032】
また、立体スケール23は、コンバージェンス面18より立体カメラから遠い位置に配置されたときの立体スケールである。ここで、第1の撮像装置1と第2の撮像装置2を結ぶ基準線9から立体スケール23までの距離をDlとすると、立体スケール23の目盛の大きさは、基準立体スケール21の目盛のDc/Dl倍になる。
なお、基準線9から立体スケール23までの距離は、立体画像表示装置4において、立体スケール23の左目用画像と右目用画像の左右配置関係と視線交差角α2、あるいは、コンバージェンス面18に投影された左目用画像と右目用画像の間の距離L2に関係する量として、算出することができる。
【0033】
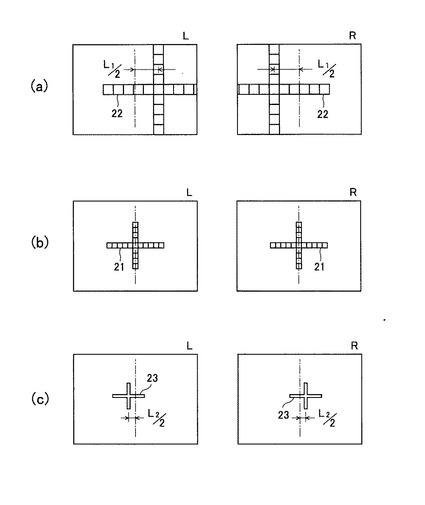
図5には、図4に示した立体スケール21,22,23について、立体画像表示装置4における、左目用画像Lの表示位置と表示画像、右目用画像Rの表示位置と表示画像とを示している。図には、画面の中央位置が一点鎖線で示されており、画面の中央位置と立体スケールの中心位置との距離が示されている。
【0034】
図5(a)は、立体カメラに最も近い立体スケール22について示す立体画像表示装置4の表示画面である。左側の図面が立体スケール22の左目用画像が表示された立体画像表示装置4の表示部を表し、右側の図面が立体スケール22の右目用画像が表示された表示部を表す。
立体スケール22は立体画像表示装置4の画像中央に立体表示されるにもかかわらず、左目用画像は右側に偏倚しており、右目用画像は左側に偏倚している。片目用画像の偏倚量はそれぞれL1/2で、両者の隔たりはL1になる。立体スケール22の目盛の大きさは、基準立体スケール21の目盛に対して、Dc/Ds倍になっている。
【0035】
図5(b)は、コンバージェンス面に形成される基準立体スケール21について示す立体画像表示装置4の表示画面である。左側の図面が左目用画像を表示した立体画像表示装置4の表示部を表し、右側の図面が右目用画像を表示した表示部を表す。
基準立体スケール21は、左目用画像と右目用画像のいずれも画面中央位置に表されて、標準立体スケール21の画像の中心位置の偏倚はない。基準立体スケール21の目盛の大きさは、実体の立体スケールテンプレートと対照させて校正された値になっている。
【0036】
図5(c)は、コンバージェンス面より遠い立体スケール23について示す立体画像表示装置4の表示画面である。左側の図面が立体スケール23の左目用画像が表示された立体画像表示装置4の表示部を表し、右側の図面が立体スケール23の右目用画像が表示された表示部を表す。
立体スケール23は立体画像表示装置4の画像中央に表示されるにもかかわらず、左目用画像は左側に偏倚しており、右目用画像は右側に偏倚している。片目用画像の偏倚量はそれぞれL2/2で、両者の隔たりはL2になる。立体スケール23の目盛の大きさは、基準立体スケール21の目盛に対して、Dc/Dl倍になっている。
【0037】
立体スケールは、看者がたとえば操作盤を通じて指示する表示位置にしたがって、立体スケールの形状と大きさ、および表示位置を決め、これに適合する立体スケールの左目用画像と右目用画像を生成し、立体画像表示装置4に表示させる。
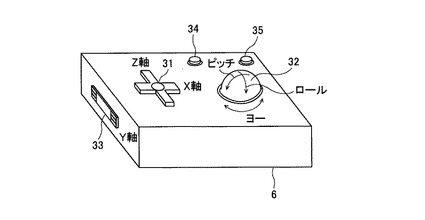
図6は、本実施形態の立体画像表示装置に係る立体スケール像形成装置に用いる操作盤6の1例を示す斜視図である。
【0038】
図6に示すように、操作盤6には、2方向にスイングする十字キー31と、トラッキングボール32と、前後方向にスイングするシーソーキー33と、2個の押しボタンスイッチ34,35とが設けられている。
十字キー31は、X軸方向とZ軸方向の移動を指示するスイッチである。十字キー31の横方向の腕はX軸方向の制御を行い、腕の右側を押し込めば、立体スケールは横方向右側(X軸正方向)に移動し、左側を押し込めば立体スケールは横方向左側(X軸負方向)に移動する。また、縦方向の腕はZ軸方向の制御を行い、腕の上側を押し込めば、立体スケールは上の方向(Z軸正方向)に移動し、下側を押し込めば、下の方向(Z軸負方向)に移動する。なお、十字キー31は、長押しにより上の通り決められた方向に高速移動するように構成しても良い。
【0039】
シーソーキー33は、Y軸方向の移動を指示するスイッチである。シーソーキー33は、操作盤6の側面に設けられ、シーソーキー33の向側の端部を押し込めば立体スケールが遠方に(Y軸負方向に)表示されるようになり、手前側の端部を押し込めば立体スケールが手前に近づくようになる(Y軸正方向に移動する)。シーソーキー33は押し込み深さによって立体スケールの運動方向と速度を指定するものであっても良い。
【0040】
操作盤6は、十字キー31とシーソーキー33により、立体スケールの中心位置を映像中の任意の位置に決めることができる。立体スケールの目盛は、Y軸方向の座標に基づいて大きさが決められる。したがって、映像中の任意の対象物について、操作盤6の十字キー31とシーソーキー33を操作して、立体スケールの表示位置が対象物の位置に来るように調整することにより、対象物の位置における実寸測定を行うことができる。
【0041】
ただし、十字キー31とシーソーキー33だけでは、立体スケールは平行移動するだけなので、対象物について測定したい方向が鉛直方向や水平方向でないときは、立体スケールを対象物の像の寸法を知りたい向きに当てて直接に寸法を知ることができない。
トラックボール32は、3軸回転方向の運動を指示する操作端で、トラックボールの垂直軸周りの回転に立体スケールのZ軸周りのヨー運動、左右方向の回転にY軸周りのピッチ運動、前後方向の回転にX軸周りのロール運動をそれぞれ割り当てて、立体スケールの回転運動を制御できるようになっている。
【0042】
たとえば、立体スケールを映像画面中で右に傾けたいときは、トラックボール32を右に回せばよい。立体スケールをZ軸周りに回転させたいときは、トラックボール32を水平面内で回転させればよい。さらに、立体スケールを手前に傾けたいときは、トラックボール32を手前に回せばよい。いずれも、トラックボールの運動方向と、立体スケールの運動方向が直感的な関係を有するので、操作する人が立体スケールを制御するときに迷うことがない。
このように、トラックボール32を操作端として追加すれば、立体スケールの回転を含めた6軸を簡単に制御することができるようになる。
【0043】
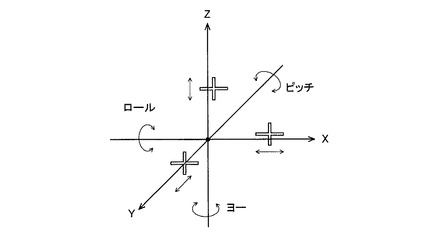
図7は、本実施形態に係る立体スケールの各軸の移動状況を説明する概念図で、十字キー31とシーソーキー33とトラックボール32を操作端として、立体スケールの位置や姿勢を調整する関係を示す。
十字キー31により、立体スケールのX軸方向の平行移動とZ軸方向の平行移動を制御する。また、シーソーキー33により、立体スケールのY軸方向の平行移動を制御する。
【0044】
また、トラックボール32により、立体スケールの回転を制御する。トラックボール32が支配する回転運動は、Z軸周りのヨー運動、Y軸周りのピッチ運動、X軸周りのロール運動の、3軸の回転運動である。
このように、立体スケールは、6軸の自由度を持っていて、それぞれが単独に変化することができるが、変化した立体スケールは、その位置に応じた目盛を持っていなければならない。すなわち、Y軸方向に移動した場合は、撮像装置の基準線9から立体スケールまでの距離Dyが変化するので、基準線からの距離Dcの位置にある基準立体スケール21の目盛を基準として、そのDc/Dy倍の大きさの目盛を備えるようにしなければならない。
【0045】
なお、6自由度の装置は制御が容易でないので、むしろ拘束をして自由度を減少させることにより、制御の簡易化を図ることができる。本実施形態の操作盤6では、X軸とロール軸、Y軸とピッチ軸、Z軸とヨー軸の2軸毎にグループ化して、同時にはそれぞれ組み合わされた2軸のみが操作できるようにするモードを採用している。なお、X,Y,Zの3軸の内のいずれか一つの操作を選んだときに、ロール軸、ピッチ軸、ヨー軸を同時に操作できるモードも準備することができる。操作盤6の押しボタンスイッチ34は、これら軸拘束機能の作動と解除を選択するスイッチである。これら軸拘束機能を備えることにより、更に一段の操作性向上が可能になった。
【0046】
撮影における映像の拡大縮小や、対象の切り換えなどがあると、対象物に沿わせて表示した立体スケールの位置や目盛の大きさを急速に変更する必要がある。こうした場合に、トラックボール32やシーソーキー33などの操作端を操作して追従することが困難である場合がある。このため、操作盤6には、基準立体スケール21の位置に直接回帰する指示をだせるリセットキーとして押しボタンスイッチ35が用意されている。リセットキーを押すことで、立体スケールが一挙に基準位置における基準立体スケールに変化する。
このリセットキーが使えるため、映像が変化するときや映像中の測定対象を変更するときにおける立体スケールの追従性が向上する。
【0047】
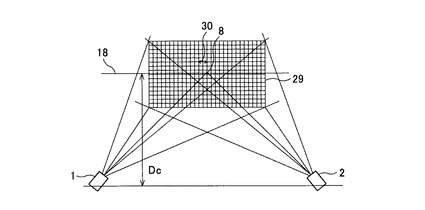
図8は、本実施形態に係る基準立体スケールの作成方法の1例を示す概念図である。
立体画像表示装置4に表示する立体スケールの目盛の大きさは、コンバージェンス面18を基準として光学的配置関係に基づく演算により求めることができる。しかし、部品の光学性能のばらつきや、組立誤差、あるいは光学調整や使用による変動などにより、光学パラメータが設計値と異なる場合には、演算により得た立体スケールの目盛は信頼性が低下する。
これに対して、図8に示すように、実体の立体スケールテンプレートに基づいて、映像中に表示する立体スケールの目盛を校正する方法を用いることができる。
【0048】
図4に示したコンバージェンス面18に対応して生成される基準立体スケール21においては、原寸大の目盛が記載された実体を有する立体スケールテンプレート29を立体カメラのコンバージェンス面18に置いて第1の撮像装置1と第2の撮像装置2で撮影し、立体画像表示装置4に表示した画像中の基準立体スケール21の像と実体の立体スケールテンプレート29の像を近接させ、基準立体スケール21の像を伸縮して目盛を実体の立体スケールテンプレート29に刻まれた単位長の目盛30と合わせることにより目盛合わせを行うことができる。
【0049】
なお、コンバージェンス面18を規定するコンバージェンスポイント8は、光学系により定まる点であって、幾何的な配置から容易に決めることができる。たとえば、実体の立体スケールテンプレートを2つの撮像装置で撮影して立体画像表示装置4に表示したときに、裸眼で観察して立体スケールの左目用画像と右目用画像が重なる位置がコンバージェンス面18に当たるので、比較的簡単に正確な位置を定めることができる。
【0050】
基準立体スケール21はコンバージェンス面18に配置されるので、立体画像表示装置4に表示された左目用画像の中心位置と右目用画像の中心位置は、一致してずれがない。
なお、画像処理技術を用いて自動的に実体の立体スケールテンプレート29の目盛を検出して大きさを算定し、目盛合わせに使うこともできる。
さらに、実体の立体スケールテンプレート29の単位長目盛30の寸法と、第1の撮像装置1と第2の撮像装置2のたとえば主点同士を結ぶ基準線9からコンバージェンス面18までの距離Dcを検出してシステムに記録し、その後にそれらのデータを使用して基準立体スケール21の像を形成するようにしてもよい。
【0051】
つぎに、コンバージェンス面18より近い位置にある対象物について適用する立体スケール22を形成する場合は、対象物の位置に実体の立体スケールテンプレートを置いて、第1の撮像装置1と第2の撮像装置2で撮影し、立体画像表示装置4に表示した画像中の立体スケール22の像を伸縮して目盛を実体の立体スケールテンプレート29に刻まれた単位長の目盛30と合わせることにより目盛合わせを行う。
なお、第1の撮像装置1と第2の撮像装置2を結ぶ基準線9から対象物の位置までの距離Dsに基づいて目盛の大きさを決めた立体スケールの像を形成し、対象物の像の位置に立体表示するようにしてもよい。目盛の大きさは、基準立体スケール21の目盛に対して、Dc/Ds倍になる。
【0052】
また、コンバージェンス面18より遠い位置にある対象物について適用する立体スケール23を形成する場合も同様に、対象物の位置に実体の立体スケールテンプレートを置いて、第1の撮像装置1と第2の撮像装置2で撮影し、立体画像表示装置4に表示した画像中の立体スケール23の像を伸縮して目盛を実体の立体スケールテンプレート29に刻まれた単位長の目盛30と合わせることにより目盛合わせを行う。
なお、第1の撮像装置1と第2の撮像装置2を結ぶ基準線9から対象物の位置までの距離Dlに基づいて、基準立体スケール21の目盛のDc/Dl倍の大きさの目盛を持った立体スケールの像を、対象物の像の位置に立体表示するようにしてもよい。
【0053】
このように、コンバージェンス面以外に配置される立体スケールについては、コンバージェンス面に配置された立体スケールの目盛に係るデータを利用することにより、実体の立体スケールテンプレートを用いず、幾何学的な配置関係に基づいて演算によって決めることもできる。
一旦各位置における目盛の校正を行った後では、そのデータを校正データマトリクスとしてシステムのメモリに格納しておいて、測定の必要に応じて校正データマトリクスのデータを選択して立体スケールを表示すればよい。校正を行っていない位置に関する立体スケールは、校正を行った位置のデータを使って内挿法または外挿法により適切な立体スケールを形成して表示すればよい。
【0054】
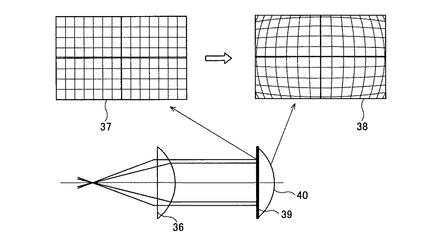
図9は、本実施形態におけるレンズ系の幾何学歪みの補正方法を説明する概念図である。光学系が理想的な薄レンズで構成されている場合は、立体スケールの目盛は正方形の格子で形成すれば済む。しかし、立体内視鏡などでは、視野範囲を広くする目的で広角レンズを使用するため、図9に示すように、広角レンズ36の中心を通る光路と広角レンズ36の周辺を通る光路の間に、光路差が生じる。この光路差が画像歪みを引き起こす。
【0055】
理想的なレンズを用いれば、実体の立体スケールテンプレートの像が平坦なスクリーン39に歪みのない格子からなる理想の目盛37を表示するが、広角レンズを使用するときは、光路差のために、歪みを有する目盛38を形成する。歪みを有する目盛38を較正して歪みを持たない目盛37とするためには、歪んだスクリーン40を形成する必要がある。
本実施形態における立体スケールは、特に立体内視鏡装置に適用するため、歪んだスクリーンを使わずに、歪みのある立体映像の中に、歪みに適合する立体スケールを形成することで対処することができる。
【0056】
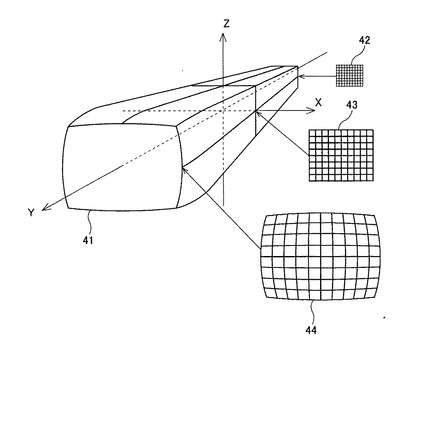
図10は、本実施形態におけるレンズ系の幾何学歪みの補正に使用する校正データマトリクスを示す概念図で、光学系歪みがある場合に形成する校正データマトリクスの概念を説明する。
校正データマトリクスは、Y座標上の平面における目盛の大きさについての数値情報によりマトリクスを構成したもので、このマトリクス上に立体スケールの各軸目盛の情報が存在する。したがって、任意の座標位置における立体スケールが、校正データマトリクスに集積された情報を用いることで形成することができる。たとえば、立体スケールの回転に対しても、校正データマトリクス上からスケール作成情報を取得して、斜行する腕に刻む目盛の大きさを確定することができる。また、必要な情報がない位置についても、内挿法あるいは外挿法などにより、欲しい情報を形成することができる。
【0057】
システムを構成する時点で、光学系歪みがあると判明している場合は、光学系歪みを前提として立体スケールの目盛を実体目盛に対応させるための光学系歪み補正用の校正データマトリクスを作成して、立体スケールの形成に利用すればよい。
光学系歪み補正用の校正データマトリクス41は、実体の立体スケールテンプレートを適宜の位置に配置して、立体カメラ(第1の撮像装置と第2の撮像装置)で取得する立体画像信号に基づいて形成する。不足のデータは、内挿法や外挿法により補填することができる。校正データマトリクス41は、立体スケール像演算装置に内蔵もしくは付属する記憶装置に格納することが好ましい。
【0058】
たとえば、コンバージェンス面に対応して生成される基準立体スケール43においては、原寸大の目盛を持つ実体の立体スケールテンプレートを立体カメラのコンバージェンス面に置いて第1の撮像装置と第2の撮像装置で撮影し、立体画像表示装置に表示した画像中の実体の立体スケールテンプレートの像を基準として、基準立体スケール43の像を伸縮して目盛を実体の立体スケールテンプレートの目盛と合わせることにより目盛合わせを行う。こうして得られたスケール像を、校正データマトリクスを構成するデータとしてメモリに記憶させる。実際には、目盛板の格子点における座標を使うことができる。
【0059】
遠地点における立体スケール42についても、同様に実体の立体スケールテンプレートを遠地点の立体スケール42の位置に置いて、画像中の実体の立体スケールテンプレート像と比較しながら遠地点の立体スケール42の目盛調整を行う。得られた目盛のデータを、校正データマトリクス41を構成するデータとして記憶させる。
さらに、近地点における立体スケール44について、同様にして目盛のデータを形成しする。近地点における立体スケール44では、広角レンズの影響で光学系歪みが現れるため、特に枠の周辺部分における格子がゆがむ現象が見られる。こうした実態を反映した測定データを、校正データマトリクス41を構成するデータとして記憶させる。
【0060】
校正データマトリクス41を形成するためのデータ数は、立体スケールに要求される精度と構成における作業量を勘案して決める。実測しなかった領域では、実測で得たデータについて内挿法あるいは外挿法を用いてデータを補充することができる。
こうして得られた校正データマトリクス41に、立体スケールの各軸方向の目盛の情報が存在する。立体スケールの6軸を変更したときにも、立体スケールの位置と姿勢に基づき、この校正データマトリクス41のデータを用いて、寸法測定に対して適正な目盛を有する立体スケールを形成することができる。
なお、校正データマトリクス41は、光学系歪みがない場合についても同様に作成して利用することにより、立体スケールの形成における効率を向上させることができる。
【0061】
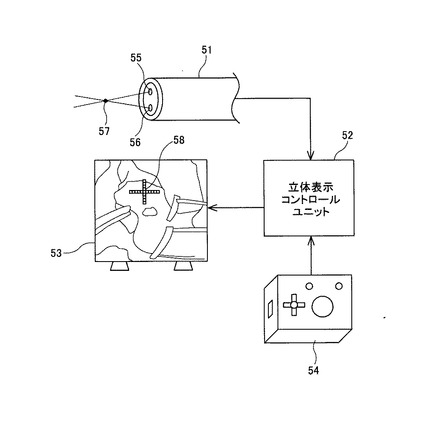
図11は、本実施形態に係る立体スケール像形成装置を立体内視鏡装置に適用した場合の例を示す立体映像表示装置の構成図である。
立体内視鏡51は、光軸が前方の決められたコンバージェンスポイント57で交差するように配置されたほぼ同じ性能を有する2個のカメラ55,56を備えている。
2個のカメラ55,56で構成される立体カメラが形成した映像信号は、立体表示コントロールユニット52に入力される。立体表示コントロールユニット52は、画像処理装置と立体スケール像演算装置を内蔵する。立体表示コントロールユニット52は、内蔵した画像処理装置により、立体カメラ55,56から入力された映像信号を立体液晶モニター53に右目用と左目用に分離して表示させる。
【0062】
立体液晶モニター53は、右目用画像と左目用画像を交互に切り換え表示し、これと同期してオンオフする専用の立体メガネ(図示しない)で観察することにより、立体内視鏡51で撮影した患部を立体的に観察することができる。
立体表示コントロールユニット52は、内蔵する立体スケール像演算装置により、立体スケールの左目用と右目用の画像信号を形成して、内蔵する画像処理装置に供給する。画像処理装置で、立体スケール画像信号の左目用信号が左目用の立体カメラの映像信号と重畳され、右目用信号が右目用の立体カメラの映像信号に重畳されて、立体液晶モニター53に送信され表示される。
こうして、立体液晶モニター53に、患部の立体映像と立体スケール58が立体的に表示される。
【0063】
立体表示コントロールユニット52には、人が操作する操作盤44が付属していて、立体表示コントロールユニット52に内蔵する立体スケール像演算装置を介して、術者あるいは補助者が、画像中の立体スケール58の位置と姿勢を指定することができる。
したがって、立体映像中の患部の位置に立体スケール58の像が重なるように調整すれば、立体スケール58の目盛を読み取ることにより、患部の寸法を測定することができ、的確な診断および手術が可能になる。
【0064】
なお、本明細書に記載の実施形態では、立体スケール像形成装置の適用先として、交差法配置された立体撮像装置を挙げているが、平行法配置の立体撮像装置においても、立体スケールの位置と姿勢を適宜に調整することができ、立体スケールの目盛を立体スケールの位置姿勢に適合する寸法に合わせることができ、さらに、立体スケールの表示位置に適合する位置に立体スケールテンプレートを配することにより、立体スケールの目盛合わせを行う立体スケール像形成装置を適用することができる。
なお、校正データマトリクスは、撮像装置の分解掃除、再調整、特性変化などがあれば、適宜に再校正して更新するものであることはいうまでもない。
【0065】
立体スケール像形成装置の操作盤は、十字キーとシーソーキー、トラッキングボール、押しボタンスイッチなどで構成されているが、3次元の位置、更に高度には3次元の姿勢をも、指定できるのであれば、操縦桿やゲーム機のコントローラなど、適宜のスイッチ操作機と同じ機構を利用することができる。
【産業上の利用可能性】
【0066】
本発明の立体スケール像形成装置を用いることにより、立体映像装置に表示される物体のサイズを立体的に測定することができるようになるので、特に立体内視鏡装置を用いた診断や手術などにおいて、有効である。
【符号の説明】
【0067】
1 第1の撮像装置
2 第2の撮像装置
3 画像処理装置
4 立体画像表示装置
5 立体スケール像演算装置
6 操作盤
7 対象物
8 コンバージェンスポイント
9 撮像装置の主点を結ぶ基準線
10 対象物の像
11 立体スケール像
12 対象物(猫)
13 対象物(教会)
14 左目用の画像
15 右目用の画像
16 左目用の画像
17 右目用の画像
18 コンバージェンス面
20 立体スケール像形成装置
21 基準立体スケール像
22 立体スケール像
23 立体スケール像
29 実体の立体スケールテンプレート
30 単位長の目盛
31 十字キー
32 トラッキングボール
33 シーソーキー
34,35 押しボタンスイッチ
36 広角レンズ
37 理想の目盛
38 広角レンズで得られる目盛
39 歪みのない表示位置
40 広角レンズによる表示位置
41 校正データマトリクス
42 遠地点データ
43 コンバージェンスポイントのデータ
44 近地点データ
51 立体内視鏡
52 立体表示コントロールユニット
53 立体液晶モニター
54 操作盤
55,56 立体カメラ
57 コンバージェンスポイント
58 立体スケール
【技術分野】
【0001】
本発明は、立体撮像装置で取得する画像を表示する立体映像表示装置において、画像に表示された物体の実寸法を推定するために使用する立体スケール像を形成する装置に関する。
【背景技術】
【0002】
近年、立体映像表示装置は著しく発達してきている。立体映像表示装置では、たとえば、左右一対の撮像手段を視差を持つように配置し、撮像された左右一対の画像をモニターに表示して立体視化する。立体視には、左右画像を時分割で交互に表示し、液晶シャッターを備えたメガネで左右画像を交互に観察する時間分割立体表示方式や、左右画像をそれぞれ偏光軸が直交する偏光フィルタを通した上で、同一面に重ねて偏光表示し、左右で偏光軸が直交する偏光フィルタメガネを用いて左右画像に分離する偏光フィルタ眼鏡方式など、各種の原理に基づく装置が利用されている。なお、裸眼で立体映像を観察することができる方法も開発されている。
【0003】
映像の立体視化により、被写体に対する識別力が格段に向上する。この利点を使って、2次元画像では自動判定が難しかった侵入者の識別を試みた例が報告されている。また、特に立体内視鏡カメラが使用できれば、内蔵疾患の診断や手術を支援する上で大きな効果が期待される。
さらに、立体映像中の物体の寸法を簡単に知ることができれば、的確な診断や手術に大きく貢献することになる。
【0004】
しかし、立体内視鏡カメラから得られる映像は、形状と配置、色が主な情報で、映し出される映像の大きさに関する情報は、直接に得ることはできず、表示映像内に映し込まれた予め寸法を知っている鉗子など比較対象物に基づいて得ることになる。しかし、比較対象物との位置関係は必ずしも正確に求めることができないので、映像中の対象物についての大きさや距離に関する情報は確実性がない。
【0005】
立体カメラによる撮影方法には平行法と交叉法がある。特に立体内視鏡においては、立体視化する2台のカメラの間隔が小さいため、平行法による場合は視線交差角が小さくなって立体感に乏しくなる。一方、立体内視鏡を使う目的からすると、観察可能な領域が広く立体感が高いことが好ましい。そこで、立体内視鏡では、普通、交叉法を使った広角レンズにより撮像した映像を立体視化することで、視野を広げ、かつ奥行き方向の距離を大きく表示できるようにしている。
このような、交叉法により撮影した映像を対象として距離画像を生成する手法は、実現していない。また、立体映像表示装置において、立体表示された映像の距離や寸法を取得する簡便な手法は、未だ知られていない。
【0006】
立体内視鏡装置を用いた診断あるいは手術においては、術者が、立体内視鏡カメラにより撮影して表示された立体映像に映し出された患部を立体的に観察して、たとえば、患部の形状や周囲の状況、色などを診断の重要な判断材料とする。しかし、患部の奥行き寸法を正確に推定する手段がなく、立体映像として奥行きを感じさせる立体映像は得られるものの、その寸法は、過去の経験に基づいて類推するしか方法がなかった。また、患部の大きさも、鉗子など一緒に映像に写し込まれた比較対象物により推定するしかないが、位置関係が明確でなく正確に推定することができなかった。
なお、このような事情は、立体内視鏡装置に限らず、一般に用いられる交差法立体カメラを使用した立体映像表示装置においても、同様に、映像中の事物の寸法を正確に求めることが難しい。
【0007】
特許文献1には、計測用目盛発生回路により最適なサイズの計測用目盛をモニター上に描画するようにした立体撮像装置が記載されている。特許文献1に開示された計測用目盛発生回路は、平行法に従って配置された立体カメラを対象として、別途測定される被検物までの距離にしたがって映像の倍率を求め、倍率に対応する目盛を発生させる。
特許文献1に記載された立体撮像装置では、観察したい被検物を画像中心部に持ってくると、新しく提供された立体計測装置により被検物までの距離が自動的に測定され、測定された距離に従い被写体の撮影倍率に対応した計測用目盛が形成されて、形成された計測用目盛がモニター画面に自動的に表示されるようになっている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2007−187590号公報(特に、段落0027、0030等)
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、特許文献1記載の目盛表示は、平行法に従って配置された立体カメラを対象として、画像中心部に持ってきた被検物のみに目盛が合うので、別の被検物について寸法を知ろうとすると、その度にカメラを移動して被検物が画像中心部に来るようにして測定する必要がある。
そこで、本発明が解決しようとする課題は、立体カメラで撮影した立体映像の任意の位置に存在する対象物について、その奥行き(距離)、幅、高さなど長さに関する計測を容易にする立体スケールを形成して立体映像表示装置に表示させる立体スケール像形成装置を提供することである。
【0010】
特に、立体内視鏡装置において、画像表示装置に映し出される対象物の立体的な大きさを数値的に表現するための立体スケールを形成表示する立体スケール像形成装置を提供することである。術者は、立体スケールを利用して対象物の実際の大きさを知って、診断あるいは手術を行うことができる。
【課題を解決するための手段】
【0011】
上記課題を解決するため、第1の撮像装置と第2の撮像装置と、立体画像表示装置とを備えた立体映像表示装置における、本発明に係る立体スケール像形成装置は、第1の撮像装置と第2の撮像装置それぞれの映像の中に長さ目盛を付した立体スケールの画像を形成し、映像における立体スケールの位置と第1および第2の撮像装置の主点面との距離に従って、立体スケールの視線交差角と長さ目盛の大きさとを調整して立体画像表示装置に表示し、映像中の立体スケールを立体視させる立体スケール像形成装置と、表示された前記立体スケールの位置を前記映像中で移動させる操作端を設けた操作盤とを備えることを特徴とする。
【0012】
立体映像表示装置に用いられる立体カメラは、画角等を使用用途に合わせたレンズを使用し、種類も多い。また、同じ品番の部品を使用しても光学的特性が微妙に異なることも多く、調整により光学的特性が変化する場合もある。さらに、立体カメラの特性や使用用途に合った調整(コンバージェンスなど)を行う必要がある。そのため使用レンズ、撮影条件ごとに基準を設定する必要がある。本発明の立体撮像装置における第1の撮像装置と第2の撮像装置は、交差法を用いて、互いに光軸が交差するように配置したものであってもよい。
本発明の1態様に係る立体スケール像形成装置は、交差法を用いた立体カメラの光軸交差角である輻輳角に対応した映像深度に、実物に対応する大きさを持った長さ目盛を備えた立体スケールを画像中に表示するので、撮像装置から同じ距離にある被写体の奥行き(距離または長さ)、水平方向の長さ(幅)、垂直方向の高さ(長さ)を知ることができる。
また、立体スケールは適宜の位置に表示することができ、立体スケールの表示位置と第1および第2の撮像装置の主点面との距離に従って目盛を調整することにより、適宜の位置に撮像された被写体に適用することができる立体スケールを表示することができるので、被写体の実際の大きさを容易に推定することができる。
【0013】
さらに、看者は、操作盤を用いて、簡単に立体スケールの表示位置あるいは姿勢を調整することができる。看者は、対象とする被写体と立体スケールが表示された映像を観察しながら被写体の深度に立体スケールの深度を合わせて、表示された目盛を使って実物の大きさを測定する。操作盤には、直交座標系の3軸、あるいはさらに3個の回転軸を加えた6軸の運動を指定する操作端に加えて、1操作で直ちに基準位置に戻すことができる操作端を備えることが便利である。立体スケールの基準位置は、2つの撮影装置の光軸の交差点すなわちコンバージェンス点であることが好ましい。
【0014】
立体カメラが映し出す映像にオーバーライドされる立体スケールのマンマシンインターフェースとしての操作盤は、簡便に操作できるものであることが好ましい。たとえば、術者の指示で補助者が簡単に操作したり、収録された立体映像を後日分析する場合に簡便に操作したりできることが要求される。特に、観察対象物の形状や向きがあらかじめ特定できないことを考慮し、本発明における操作盤は、ローカル座標系に基づく操作により各軸ごとに指定することにより、立体スケールの目盛を移動・回転させることができることが好ましい。また、用途によっては各軸同士を拘束して使用することが必要な場合があるので、対象とする軸を操作することで各軸が連動するように構成してもよい。
【0015】
立体画像表示装置の画像に表示する立体スケールは、対象位置に設置した基準立体スケールを立体撮像装置で撮影して得られた映像に基づいて、目盛を実際の寸法と対比して校正したデータを集積して校正マトリックスとして記憶装置に記憶し、記憶された校正マトリックスに基づいて形成して表示することができる。
なお、位置や姿勢の変更に伴い、立体スケールの目盛の大きさを計算で求めることができる。一方、立体スケールの使われる領域について、その領域をカバーする点位置について、予め計算あるいは基準パターン実写像との対比により、目盛に振り直すことができるデータを形成しておいて、校正マトリックスとして記憶装置に格納しておくことができる。
目盛パターンを実写して、目盛パターンの実写像と立体スケール像の目盛とを対比させて較正する場合は、校正マトリックスを用いて、実態に沿った立体スケールを簡単に形成することができる。校正マトリックスの値をそのまま利用できないときは、内挿法あるいは外挿法を使用して補完することができる。
【発明の効果】
【0016】
本発明に係る立体映像表示装置の立体スケール像形成装置が被写体の位置に立体スケールを生成するので、看者は、立体スケールを参照して立体映像に表された被写体の寸法を正確に計測することができる。
特に、立体内視鏡装置を用いて患部の観察や手術を行うときには、本発明に係る立体スケール像形成装置を用いることにより、術者が画像中に表示された患部などの寸法を簡単に知ることができるので便利である。
【図面の簡単な説明】
【0017】
【図1】本発明の1つの実施形態に係る立体スケール像形成装置を用いた立体映像表示装置の構成図である。
【図2】人の目による立体視の原理を説明する概念図である。
【図3】立体画像表示装置の映像中における対象物の画像の表示位置を示す概念図である。
【図4】本実施形態に係る立体スケールの配置と立体カメラの視線との関係を示す概念図である。
【図5】本実施形態に係る立体スケールの位置と立体画像表示装置における表示位置の関係を説明する概念図である。
【図6】本実施形態に係る立体スケール像形成装置に用いる操作盤の1例を示す斜視図である。
【図7】本実施形態に係る立体スケールの各軸の移動状況を説明する概念図である。
【図8】本実施形態に係る基準立体スケールの作成方法の1例を示す概念図である。
【図9】本実施形態におけるレンズ系の幾何学歪みの補正方法を説明する概念図である。
【図10】本実施形態におけるレンズ系の幾何学歪みの補正に使用する校正データマトリクスを示す概念図である。
【図11】本実施形態に係る立体スケール像形成装置を立体内視鏡装置に適用した場合の例を示す立体映像表示装置の構成図である。
【発明を実施するための形態】
【0018】
以下、本発明に係る立体映像表示装置の立体スケール像形成装置について、図面を参照しながら詳しく説明する。なお、図面においては、同じ機能を有する構成部材については同じ参照番号を付して説明を簡約にし、説明の重複を避けるようにした。
【0019】
図1は、本発明の1つの実施形態に係る立体スケール像形成装置を用いた立体映像表示装置の構成図である。第1の撮像装置1と第2の撮像装置2は、ほぼ同じ性能を有するカメラで、固定の光軸間距離をおいて結合され、光軸が前方の決められたコンバージェンスポイント8で交差するように配置されている。また、コンバージェンスポイント8を通り、2つの撮像装置の主点同士を結ぶ直線9と2本の光軸を含む面に垂直な面をコンバージェンス面18という。なお、対象物上の1点を見通す2個の撮像装置の視線が交差して形成される角度を視線交差角αという。また、コンバージェンスポイント8に対する視線交差角を特に輻輳角θとよぶ。
【0020】
第1の撮像装置1と第2の撮像装置2が形成した映像信号は、画像処理装置3に入力される。画像処理装置3は、撮像装置1,2から入力された映像信号を立体画像表示装置4に右目用と左目用に分離して表示させる。図においては、第1の撮像装置1から供給される映像信号は左目で見る画像を表示するもの、第2の撮像装置2から供給される映像信号は右目で見る画像を表示するものである。
【0021】
立体画像表示装置4は、右目用画像と左目用画像を交互に切り換え表示し、これと同期してオンオフする液晶シャッタメガネなど図示しない専用の立体メガネで観察する時間分割立体表示方式の立体画像表示装置であれば、色彩の再現性も確保できるので好ましい。また、左右の画像を偏光軸が直交する偏光フィルタを通してプロジェクタ投射したりして同一画面に重ねて表示し、偏光フィルタ眼鏡で左目用画像と右目用画像に分離する偏光フィルタ眼鏡方式や、立体画像表示装置と立体メガネの機能を共に備えたオーバーヘッドディスプレイ(OHD)などを使うこともできる。
なお、特に、術者が患部の観察や手術を行うために使用する立体映像表示装置では、患部の色彩も重要な情報であるため、立体視のために映像の色彩が変化する方式は好ましくない。
【0022】
立体スケール像演算装置5は、立体スケールの左目用と右目用の画像信号を形成して、画像処理装置4に供給する。画像処理装置4で、立体スケール画像信号の左目用信号が第1の撮像装置1の映像信号と重畳され、右目用信号が第2の撮像装置2の映像信号に重畳されて、立体画像表示装置4に送信され表示される。
こうして、立体画像表示装置4に、対象とする物体7の立体映像10と立体スケール11が表示され、立体メガネを装着して観察するとこれらの映像を立体視することができる。
【0023】
立体スケール像演算装置5には、人が操作する操作盤6が付属して、画像中の立体スケール11の位置と姿勢を指定することができる。立体スケール像形成装置20は、立体スケール像演算装置5と操作盤6により、構成される。操作盤6を用いて、対象物7の立体映像10の位置に立体スケール11の像が重なるように調整すれば、立体スケール11の目盛を読み取ることにより、対象物7の寸法を測定することができる。
なお、対象物の映像10において垂直や水平の方向でない斜行した方向について寸法を知りたいときには、操作盤6により立体スケール11を適宜の軸について回転させて目盛を測定方向に沿うようにさせることにより、直接対象物の映像10に当てて寸法を測定できるようにすればよい。
【0024】
図2は、人の目による立体視の原理を説明する概念図である。図は、立体カメラで距離の異なる対象物を観察する場合を示している。図3は、立体画像表示装置4の映像中における対象物画像の表示位置を示す概念図である。右目で見る画像を実線で、左目で見る画像を点線で囲んで示している。
人の左目に擬せられる第1の撮像装置1と、右目に擬せられる第2の撮像装置2は、交差法を使って立体視を可能とする。
【0025】
図2において、撮像装置の光軸が交差するコンバージェンスポイント8より撮像装置に近い位置に存在する対象物(猫)12は、第1の撮像装置1で生成された左目用の画像14が、図3に点線で示すように立体画像表示装置4の中心より右側に表示され、第2の撮像装置2で生成された右目用の画像15が、実線で示すように立体画像表示装置4の中心より左側に表示される。これらの画像を立体メガネにより立体視することにより、対象物12は、立体画像表示装置4の映像中に実際の空間における対象物12の位置にあるように観察される。
【0026】
一方、コンバージェンスポイント8より遠方にある対象物(教会)13は、近い位置にある対象物12とは逆に、左目用の画像16が点線で示されるように立体画像表示装置4の中心より左側に表示され、右目用の画像17が実線で示されるように立体画像表示装置4の中心より右側に表示されて、立体視することにより、2つの撮像装置の画像を見る視線の交点となる、実際の空間における対象物13の位置にあるように観察される。
【0027】
このように、撮像装置1,2と対象物との距離がコンバージェンス面より近い場合は、立体画像表示装置4に表示される左目用画像14が右目用画像15より右に表示され、撮像装置1,2と対象物との距離がコンバージェンス面より遠い場合は、立体画像表示装置4に表示される左目用画像16が右目用画像17より左に表示される。さらに、対象物が近いほど視線交差角αが大きく、遠いほど視線交差角αが小さくなり、対象物の画像の大きさは距離に反比例する。
【0028】
立体スケールについても、映像空間内の立体スケールの位置に対応して同じことが言える。すなわち、立体画像表示装置4において立体スケール11を立体視する場合の立体スケール像の配置位置までの距離は、左目用画像と右目用画像の左右配置と視線交差角αを決めることにより確定されることになる。なお、視線交差角αは、立体スケール中のある1点を見通す時の第1の撮像装置1の視線と第2の撮像装置2の視線が交差する角であるため、立体画像表示装置4において、コンバージェンス面に投影された左目用画像と右目用画像の間の距離に関係する量となる。
【0029】
図4は、本実施形態に係る立体スケールの配置と立体カメラの視線との関係を示す概念図、図5は、本実施形態に係る立体スケールの位置と立体画像表示装置における表示位置の関係を説明する概念図である。
図4は、立体画像表示装置に表示する立体スケールを立体的に表示した概念図である。図4では、立体スケールの中心に原点を置くローカル座標系について、水平軸をX軸、奥行き方向の軸をY軸、垂直軸をZ軸として表現し、位置の異なる立体スケール相互間の関係、特に奥行き関係を明確に示すようにした。このため、図4では、立体スケール21,22,23は、撮像装置の中間点とコンバージェンスポイント8を結ぶ絶対座標系のY軸上に置かれている。
【0030】
図4に示すように、第1の撮像装置1の光軸と第2の撮像装置2の光軸が交わって形成するコンバージェンスポイント8の位置に、2つの光軸を含む面に垂直なコンバージェンス面18が存在する。このコンバージェンス面18に基準立体スケール21が形成される。基準立体スケール21は、光軸の交差角と同じ輻輳角θ(α0)を有する。基準立体スケール21の目盛は、実寸、あるいは決まった縮尺で表示される。ここで、第1の撮像装置1と第2の撮像装置2のたとえば主点同士を結ぶ基準線9からコンバージェンス面18までの距離をDcとする。
なお、立体スケールは、方眼を形成した面や、図4に示すような目盛棒を直交させた十字など、適宜のものであっても良い。
【0031】
立体スケール22は、コンバージェンス面18より立体カメラに近い位置に配置されたときの立体スケールである。ここで、第1の撮像装置1と第2の撮像装置2を結ぶ基準線9から立体スケール22までの距離をDsとすると、立体スケール22の目盛の大きさは、基準立体スケール21の目盛のDc/Ds倍になる。
なお、基準線9から立体スケール22までの距離は、先に述べた通り、立体画像表示装置4において、立体スケール22の左目用画像と右目用画像の左右配置関係と視線交差角α1、あるいは、コンバージェンス面18に投影された左目用画像と右目用画像の間の距離L1に関係する量として、算出することができる。
【0032】
また、立体スケール23は、コンバージェンス面18より立体カメラから遠い位置に配置されたときの立体スケールである。ここで、第1の撮像装置1と第2の撮像装置2を結ぶ基準線9から立体スケール23までの距離をDlとすると、立体スケール23の目盛の大きさは、基準立体スケール21の目盛のDc/Dl倍になる。
なお、基準線9から立体スケール23までの距離は、立体画像表示装置4において、立体スケール23の左目用画像と右目用画像の左右配置関係と視線交差角α2、あるいは、コンバージェンス面18に投影された左目用画像と右目用画像の間の距離L2に関係する量として、算出することができる。
【0033】
図5には、図4に示した立体スケール21,22,23について、立体画像表示装置4における、左目用画像Lの表示位置と表示画像、右目用画像Rの表示位置と表示画像とを示している。図には、画面の中央位置が一点鎖線で示されており、画面の中央位置と立体スケールの中心位置との距離が示されている。
【0034】
図5(a)は、立体カメラに最も近い立体スケール22について示す立体画像表示装置4の表示画面である。左側の図面が立体スケール22の左目用画像が表示された立体画像表示装置4の表示部を表し、右側の図面が立体スケール22の右目用画像が表示された表示部を表す。
立体スケール22は立体画像表示装置4の画像中央に立体表示されるにもかかわらず、左目用画像は右側に偏倚しており、右目用画像は左側に偏倚している。片目用画像の偏倚量はそれぞれL1/2で、両者の隔たりはL1になる。立体スケール22の目盛の大きさは、基準立体スケール21の目盛に対して、Dc/Ds倍になっている。
【0035】
図5(b)は、コンバージェンス面に形成される基準立体スケール21について示す立体画像表示装置4の表示画面である。左側の図面が左目用画像を表示した立体画像表示装置4の表示部を表し、右側の図面が右目用画像を表示した表示部を表す。
基準立体スケール21は、左目用画像と右目用画像のいずれも画面中央位置に表されて、標準立体スケール21の画像の中心位置の偏倚はない。基準立体スケール21の目盛の大きさは、実体の立体スケールテンプレートと対照させて校正された値になっている。
【0036】
図5(c)は、コンバージェンス面より遠い立体スケール23について示す立体画像表示装置4の表示画面である。左側の図面が立体スケール23の左目用画像が表示された立体画像表示装置4の表示部を表し、右側の図面が立体スケール23の右目用画像が表示された表示部を表す。
立体スケール23は立体画像表示装置4の画像中央に表示されるにもかかわらず、左目用画像は左側に偏倚しており、右目用画像は右側に偏倚している。片目用画像の偏倚量はそれぞれL2/2で、両者の隔たりはL2になる。立体スケール23の目盛の大きさは、基準立体スケール21の目盛に対して、Dc/Dl倍になっている。
【0037】
立体スケールは、看者がたとえば操作盤を通じて指示する表示位置にしたがって、立体スケールの形状と大きさ、および表示位置を決め、これに適合する立体スケールの左目用画像と右目用画像を生成し、立体画像表示装置4に表示させる。
図6は、本実施形態の立体画像表示装置に係る立体スケール像形成装置に用いる操作盤6の1例を示す斜視図である。
【0038】
図6に示すように、操作盤6には、2方向にスイングする十字キー31と、トラッキングボール32と、前後方向にスイングするシーソーキー33と、2個の押しボタンスイッチ34,35とが設けられている。
十字キー31は、X軸方向とZ軸方向の移動を指示するスイッチである。十字キー31の横方向の腕はX軸方向の制御を行い、腕の右側を押し込めば、立体スケールは横方向右側(X軸正方向)に移動し、左側を押し込めば立体スケールは横方向左側(X軸負方向)に移動する。また、縦方向の腕はZ軸方向の制御を行い、腕の上側を押し込めば、立体スケールは上の方向(Z軸正方向)に移動し、下側を押し込めば、下の方向(Z軸負方向)に移動する。なお、十字キー31は、長押しにより上の通り決められた方向に高速移動するように構成しても良い。
【0039】
シーソーキー33は、Y軸方向の移動を指示するスイッチである。シーソーキー33は、操作盤6の側面に設けられ、シーソーキー33の向側の端部を押し込めば立体スケールが遠方に(Y軸負方向に)表示されるようになり、手前側の端部を押し込めば立体スケールが手前に近づくようになる(Y軸正方向に移動する)。シーソーキー33は押し込み深さによって立体スケールの運動方向と速度を指定するものであっても良い。
【0040】
操作盤6は、十字キー31とシーソーキー33により、立体スケールの中心位置を映像中の任意の位置に決めることができる。立体スケールの目盛は、Y軸方向の座標に基づいて大きさが決められる。したがって、映像中の任意の対象物について、操作盤6の十字キー31とシーソーキー33を操作して、立体スケールの表示位置が対象物の位置に来るように調整することにより、対象物の位置における実寸測定を行うことができる。
【0041】
ただし、十字キー31とシーソーキー33だけでは、立体スケールは平行移動するだけなので、対象物について測定したい方向が鉛直方向や水平方向でないときは、立体スケールを対象物の像の寸法を知りたい向きに当てて直接に寸法を知ることができない。
トラックボール32は、3軸回転方向の運動を指示する操作端で、トラックボールの垂直軸周りの回転に立体スケールのZ軸周りのヨー運動、左右方向の回転にY軸周りのピッチ運動、前後方向の回転にX軸周りのロール運動をそれぞれ割り当てて、立体スケールの回転運動を制御できるようになっている。
【0042】
たとえば、立体スケールを映像画面中で右に傾けたいときは、トラックボール32を右に回せばよい。立体スケールをZ軸周りに回転させたいときは、トラックボール32を水平面内で回転させればよい。さらに、立体スケールを手前に傾けたいときは、トラックボール32を手前に回せばよい。いずれも、トラックボールの運動方向と、立体スケールの運動方向が直感的な関係を有するので、操作する人が立体スケールを制御するときに迷うことがない。
このように、トラックボール32を操作端として追加すれば、立体スケールの回転を含めた6軸を簡単に制御することができるようになる。
【0043】
図7は、本実施形態に係る立体スケールの各軸の移動状況を説明する概念図で、十字キー31とシーソーキー33とトラックボール32を操作端として、立体スケールの位置や姿勢を調整する関係を示す。
十字キー31により、立体スケールのX軸方向の平行移動とZ軸方向の平行移動を制御する。また、シーソーキー33により、立体スケールのY軸方向の平行移動を制御する。
【0044】
また、トラックボール32により、立体スケールの回転を制御する。トラックボール32が支配する回転運動は、Z軸周りのヨー運動、Y軸周りのピッチ運動、X軸周りのロール運動の、3軸の回転運動である。
このように、立体スケールは、6軸の自由度を持っていて、それぞれが単独に変化することができるが、変化した立体スケールは、その位置に応じた目盛を持っていなければならない。すなわち、Y軸方向に移動した場合は、撮像装置の基準線9から立体スケールまでの距離Dyが変化するので、基準線からの距離Dcの位置にある基準立体スケール21の目盛を基準として、そのDc/Dy倍の大きさの目盛を備えるようにしなければならない。
【0045】
なお、6自由度の装置は制御が容易でないので、むしろ拘束をして自由度を減少させることにより、制御の簡易化を図ることができる。本実施形態の操作盤6では、X軸とロール軸、Y軸とピッチ軸、Z軸とヨー軸の2軸毎にグループ化して、同時にはそれぞれ組み合わされた2軸のみが操作できるようにするモードを採用している。なお、X,Y,Zの3軸の内のいずれか一つの操作を選んだときに、ロール軸、ピッチ軸、ヨー軸を同時に操作できるモードも準備することができる。操作盤6の押しボタンスイッチ34は、これら軸拘束機能の作動と解除を選択するスイッチである。これら軸拘束機能を備えることにより、更に一段の操作性向上が可能になった。
【0046】
撮影における映像の拡大縮小や、対象の切り換えなどがあると、対象物に沿わせて表示した立体スケールの位置や目盛の大きさを急速に変更する必要がある。こうした場合に、トラックボール32やシーソーキー33などの操作端を操作して追従することが困難である場合がある。このため、操作盤6には、基準立体スケール21の位置に直接回帰する指示をだせるリセットキーとして押しボタンスイッチ35が用意されている。リセットキーを押すことで、立体スケールが一挙に基準位置における基準立体スケールに変化する。
このリセットキーが使えるため、映像が変化するときや映像中の測定対象を変更するときにおける立体スケールの追従性が向上する。
【0047】
図8は、本実施形態に係る基準立体スケールの作成方法の1例を示す概念図である。
立体画像表示装置4に表示する立体スケールの目盛の大きさは、コンバージェンス面18を基準として光学的配置関係に基づく演算により求めることができる。しかし、部品の光学性能のばらつきや、組立誤差、あるいは光学調整や使用による変動などにより、光学パラメータが設計値と異なる場合には、演算により得た立体スケールの目盛は信頼性が低下する。
これに対して、図8に示すように、実体の立体スケールテンプレートに基づいて、映像中に表示する立体スケールの目盛を校正する方法を用いることができる。
【0048】
図4に示したコンバージェンス面18に対応して生成される基準立体スケール21においては、原寸大の目盛が記載された実体を有する立体スケールテンプレート29を立体カメラのコンバージェンス面18に置いて第1の撮像装置1と第2の撮像装置2で撮影し、立体画像表示装置4に表示した画像中の基準立体スケール21の像と実体の立体スケールテンプレート29の像を近接させ、基準立体スケール21の像を伸縮して目盛を実体の立体スケールテンプレート29に刻まれた単位長の目盛30と合わせることにより目盛合わせを行うことができる。
【0049】
なお、コンバージェンス面18を規定するコンバージェンスポイント8は、光学系により定まる点であって、幾何的な配置から容易に決めることができる。たとえば、実体の立体スケールテンプレートを2つの撮像装置で撮影して立体画像表示装置4に表示したときに、裸眼で観察して立体スケールの左目用画像と右目用画像が重なる位置がコンバージェンス面18に当たるので、比較的簡単に正確な位置を定めることができる。
【0050】
基準立体スケール21はコンバージェンス面18に配置されるので、立体画像表示装置4に表示された左目用画像の中心位置と右目用画像の中心位置は、一致してずれがない。
なお、画像処理技術を用いて自動的に実体の立体スケールテンプレート29の目盛を検出して大きさを算定し、目盛合わせに使うこともできる。
さらに、実体の立体スケールテンプレート29の単位長目盛30の寸法と、第1の撮像装置1と第2の撮像装置2のたとえば主点同士を結ぶ基準線9からコンバージェンス面18までの距離Dcを検出してシステムに記録し、その後にそれらのデータを使用して基準立体スケール21の像を形成するようにしてもよい。
【0051】
つぎに、コンバージェンス面18より近い位置にある対象物について適用する立体スケール22を形成する場合は、対象物の位置に実体の立体スケールテンプレートを置いて、第1の撮像装置1と第2の撮像装置2で撮影し、立体画像表示装置4に表示した画像中の立体スケール22の像を伸縮して目盛を実体の立体スケールテンプレート29に刻まれた単位長の目盛30と合わせることにより目盛合わせを行う。
なお、第1の撮像装置1と第2の撮像装置2を結ぶ基準線9から対象物の位置までの距離Dsに基づいて目盛の大きさを決めた立体スケールの像を形成し、対象物の像の位置に立体表示するようにしてもよい。目盛の大きさは、基準立体スケール21の目盛に対して、Dc/Ds倍になる。
【0052】
また、コンバージェンス面18より遠い位置にある対象物について適用する立体スケール23を形成する場合も同様に、対象物の位置に実体の立体スケールテンプレートを置いて、第1の撮像装置1と第2の撮像装置2で撮影し、立体画像表示装置4に表示した画像中の立体スケール23の像を伸縮して目盛を実体の立体スケールテンプレート29に刻まれた単位長の目盛30と合わせることにより目盛合わせを行う。
なお、第1の撮像装置1と第2の撮像装置2を結ぶ基準線9から対象物の位置までの距離Dlに基づいて、基準立体スケール21の目盛のDc/Dl倍の大きさの目盛を持った立体スケールの像を、対象物の像の位置に立体表示するようにしてもよい。
【0053】
このように、コンバージェンス面以外に配置される立体スケールについては、コンバージェンス面に配置された立体スケールの目盛に係るデータを利用することにより、実体の立体スケールテンプレートを用いず、幾何学的な配置関係に基づいて演算によって決めることもできる。
一旦各位置における目盛の校正を行った後では、そのデータを校正データマトリクスとしてシステムのメモリに格納しておいて、測定の必要に応じて校正データマトリクスのデータを選択して立体スケールを表示すればよい。校正を行っていない位置に関する立体スケールは、校正を行った位置のデータを使って内挿法または外挿法により適切な立体スケールを形成して表示すればよい。
【0054】
図9は、本実施形態におけるレンズ系の幾何学歪みの補正方法を説明する概念図である。光学系が理想的な薄レンズで構成されている場合は、立体スケールの目盛は正方形の格子で形成すれば済む。しかし、立体内視鏡などでは、視野範囲を広くする目的で広角レンズを使用するため、図9に示すように、広角レンズ36の中心を通る光路と広角レンズ36の周辺を通る光路の間に、光路差が生じる。この光路差が画像歪みを引き起こす。
【0055】
理想的なレンズを用いれば、実体の立体スケールテンプレートの像が平坦なスクリーン39に歪みのない格子からなる理想の目盛37を表示するが、広角レンズを使用するときは、光路差のために、歪みを有する目盛38を形成する。歪みを有する目盛38を較正して歪みを持たない目盛37とするためには、歪んだスクリーン40を形成する必要がある。
本実施形態における立体スケールは、特に立体内視鏡装置に適用するため、歪んだスクリーンを使わずに、歪みのある立体映像の中に、歪みに適合する立体スケールを形成することで対処することができる。
【0056】
図10は、本実施形態におけるレンズ系の幾何学歪みの補正に使用する校正データマトリクスを示す概念図で、光学系歪みがある場合に形成する校正データマトリクスの概念を説明する。
校正データマトリクスは、Y座標上の平面における目盛の大きさについての数値情報によりマトリクスを構成したもので、このマトリクス上に立体スケールの各軸目盛の情報が存在する。したがって、任意の座標位置における立体スケールが、校正データマトリクスに集積された情報を用いることで形成することができる。たとえば、立体スケールの回転に対しても、校正データマトリクス上からスケール作成情報を取得して、斜行する腕に刻む目盛の大きさを確定することができる。また、必要な情報がない位置についても、内挿法あるいは外挿法などにより、欲しい情報を形成することができる。
【0057】
システムを構成する時点で、光学系歪みがあると判明している場合は、光学系歪みを前提として立体スケールの目盛を実体目盛に対応させるための光学系歪み補正用の校正データマトリクスを作成して、立体スケールの形成に利用すればよい。
光学系歪み補正用の校正データマトリクス41は、実体の立体スケールテンプレートを適宜の位置に配置して、立体カメラ(第1の撮像装置と第2の撮像装置)で取得する立体画像信号に基づいて形成する。不足のデータは、内挿法や外挿法により補填することができる。校正データマトリクス41は、立体スケール像演算装置に内蔵もしくは付属する記憶装置に格納することが好ましい。
【0058】
たとえば、コンバージェンス面に対応して生成される基準立体スケール43においては、原寸大の目盛を持つ実体の立体スケールテンプレートを立体カメラのコンバージェンス面に置いて第1の撮像装置と第2の撮像装置で撮影し、立体画像表示装置に表示した画像中の実体の立体スケールテンプレートの像を基準として、基準立体スケール43の像を伸縮して目盛を実体の立体スケールテンプレートの目盛と合わせることにより目盛合わせを行う。こうして得られたスケール像を、校正データマトリクスを構成するデータとしてメモリに記憶させる。実際には、目盛板の格子点における座標を使うことができる。
【0059】
遠地点における立体スケール42についても、同様に実体の立体スケールテンプレートを遠地点の立体スケール42の位置に置いて、画像中の実体の立体スケールテンプレート像と比較しながら遠地点の立体スケール42の目盛調整を行う。得られた目盛のデータを、校正データマトリクス41を構成するデータとして記憶させる。
さらに、近地点における立体スケール44について、同様にして目盛のデータを形成しする。近地点における立体スケール44では、広角レンズの影響で光学系歪みが現れるため、特に枠の周辺部分における格子がゆがむ現象が見られる。こうした実態を反映した測定データを、校正データマトリクス41を構成するデータとして記憶させる。
【0060】
校正データマトリクス41を形成するためのデータ数は、立体スケールに要求される精度と構成における作業量を勘案して決める。実測しなかった領域では、実測で得たデータについて内挿法あるいは外挿法を用いてデータを補充することができる。
こうして得られた校正データマトリクス41に、立体スケールの各軸方向の目盛の情報が存在する。立体スケールの6軸を変更したときにも、立体スケールの位置と姿勢に基づき、この校正データマトリクス41のデータを用いて、寸法測定に対して適正な目盛を有する立体スケールを形成することができる。
なお、校正データマトリクス41は、光学系歪みがない場合についても同様に作成して利用することにより、立体スケールの形成における効率を向上させることができる。
【0061】
図11は、本実施形態に係る立体スケール像形成装置を立体内視鏡装置に適用した場合の例を示す立体映像表示装置の構成図である。
立体内視鏡51は、光軸が前方の決められたコンバージェンスポイント57で交差するように配置されたほぼ同じ性能を有する2個のカメラ55,56を備えている。
2個のカメラ55,56で構成される立体カメラが形成した映像信号は、立体表示コントロールユニット52に入力される。立体表示コントロールユニット52は、画像処理装置と立体スケール像演算装置を内蔵する。立体表示コントロールユニット52は、内蔵した画像処理装置により、立体カメラ55,56から入力された映像信号を立体液晶モニター53に右目用と左目用に分離して表示させる。
【0062】
立体液晶モニター53は、右目用画像と左目用画像を交互に切り換え表示し、これと同期してオンオフする専用の立体メガネ(図示しない)で観察することにより、立体内視鏡51で撮影した患部を立体的に観察することができる。
立体表示コントロールユニット52は、内蔵する立体スケール像演算装置により、立体スケールの左目用と右目用の画像信号を形成して、内蔵する画像処理装置に供給する。画像処理装置で、立体スケール画像信号の左目用信号が左目用の立体カメラの映像信号と重畳され、右目用信号が右目用の立体カメラの映像信号に重畳されて、立体液晶モニター53に送信され表示される。
こうして、立体液晶モニター53に、患部の立体映像と立体スケール58が立体的に表示される。
【0063】
立体表示コントロールユニット52には、人が操作する操作盤44が付属していて、立体表示コントロールユニット52に内蔵する立体スケール像演算装置を介して、術者あるいは補助者が、画像中の立体スケール58の位置と姿勢を指定することができる。
したがって、立体映像中の患部の位置に立体スケール58の像が重なるように調整すれば、立体スケール58の目盛を読み取ることにより、患部の寸法を測定することができ、的確な診断および手術が可能になる。
【0064】
なお、本明細書に記載の実施形態では、立体スケール像形成装置の適用先として、交差法配置された立体撮像装置を挙げているが、平行法配置の立体撮像装置においても、立体スケールの位置と姿勢を適宜に調整することができ、立体スケールの目盛を立体スケールの位置姿勢に適合する寸法に合わせることができ、さらに、立体スケールの表示位置に適合する位置に立体スケールテンプレートを配することにより、立体スケールの目盛合わせを行う立体スケール像形成装置を適用することができる。
なお、校正データマトリクスは、撮像装置の分解掃除、再調整、特性変化などがあれば、適宜に再校正して更新するものであることはいうまでもない。
【0065】
立体スケール像形成装置の操作盤は、十字キーとシーソーキー、トラッキングボール、押しボタンスイッチなどで構成されているが、3次元の位置、更に高度には3次元の姿勢をも、指定できるのであれば、操縦桿やゲーム機のコントローラなど、適宜のスイッチ操作機と同じ機構を利用することができる。
【産業上の利用可能性】
【0066】
本発明の立体スケール像形成装置を用いることにより、立体映像装置に表示される物体のサイズを立体的に測定することができるようになるので、特に立体内視鏡装置を用いた診断や手術などにおいて、有効である。
【符号の説明】
【0067】
1 第1の撮像装置
2 第2の撮像装置
3 画像処理装置
4 立体画像表示装置
5 立体スケール像演算装置
6 操作盤
7 対象物
8 コンバージェンスポイント
9 撮像装置の主点を結ぶ基準線
10 対象物の像
11 立体スケール像
12 対象物(猫)
13 対象物(教会)
14 左目用の画像
15 右目用の画像
16 左目用の画像
17 右目用の画像
18 コンバージェンス面
20 立体スケール像形成装置
21 基準立体スケール像
22 立体スケール像
23 立体スケール像
29 実体の立体スケールテンプレート
30 単位長の目盛
31 十字キー
32 トラッキングボール
33 シーソーキー
34,35 押しボタンスイッチ
36 広角レンズ
37 理想の目盛
38 広角レンズで得られる目盛
39 歪みのない表示位置
40 広角レンズによる表示位置
41 校正データマトリクス
42 遠地点データ
43 コンバージェンスポイントのデータ
44 近地点データ
51 立体内視鏡
52 立体表示コントロールユニット
53 立体液晶モニター
54 操作盤
55,56 立体カメラ
57 コンバージェンスポイント
58 立体スケール
【特許請求の範囲】
【請求項1】
第1の撮像装置と第2の撮像装置と、立体画像処理装置と、画像表示装置とを備えた立体映像表示装置において、前記第1の撮像装置と前記第2の撮像装置それぞれの映像の中に長さ目盛を付した立体スケールの画像を形成し、前記立体スケールの視線交差角と前記長さ目盛の大きさとを該立体スケールの位置に合わせて調整して前記画像表示装置に表示し、前記立体スケールを立体視させる立体スケール像演算装置と、表示される前記立体スケールの位置を前記映像中で移動させる操作端を設けた操作盤とを備える、立体映像表示装置の立体スケール像形成装置。
【請求項2】
前記立体スケールの目盛は、前記立体スケールの表示位置と前記第1および第2の撮像装置の主点面との実体上の距離に従って、大きさを調整する、請求項1記載の立体映像表示装置の立体スケール像形成装置。
【請求項3】
前記立体スケールの画像は、寸法の一定したパターンを前記立体スケールの表示位置に配置して撮影した実写画像と対比して立体スケールの目盛の大きさを較正したデータを集積して形成した校正データマトリクスに基づいて形成した、請求項1記載の立体映像表示装置の立体スケール像形成装置。
【請求項4】
前記第1の撮像装置と第2の撮像装置は互いに光軸が交差するように配置され、前記立体スケールの画像は、前記第1および第2の撮像装置の光軸の交差点を含み該光軸に挟まれた角を2分する線に垂直なコンバージェンス面に、該立体スケールの右目用画像と左目用画像を投影したときの距離差を基準として、大きさを調整する、請求項1記載の立体映像表示装置の立体スケール像形成装置。
【請求項5】
前記操作盤は、映像中の該立体スケールの位置を前記光軸の交差点の位置に移動させる操作端を備える、請求項4記載の立体映像表示装置の立体スケール像形成装置。
【請求項6】
前記操作盤は、映像中の該立体スケールの姿勢を調整する操作端を備える、請求項1から5のいずれか一項に記載の立体映像表示装置の立体スケール像形成装置。
【請求項7】
前記操作盤は、映像中の該立体スケールの位置を直交座標系のX軸方向、Y軸方向、Z軸方向に独立に移動させる操作端と、映像中の該立体スケールの回転をロール軸、ピッチ軸、ヨー軸の周りに独立に調整して該立体スケールの姿勢を調整する操作端とを備え、前記立体スケール像形成装置は、ロール軸とピッチ軸とヨー軸の各軸をそれぞれ直交座標系の1軸と組み合わせて、同時にはそれぞれ組み合わされた2軸のみが操作できるようにするモードを有し、前記操作盤が該モードの指定と解除を行う操作端を備える、請求項1から4のいずれか一項に記載の立体映像表示装置の立体スケール像形成装置。
【請求項8】
立体スケールの目盛を実体目盛に対応させる数値情報を集積した校正データマトリクスを記憶装置に格納して、前記立体スケールの位置と姿勢に従って得た該校正データマトリックスの数値情報に基づいて立体スケールの画像を形成し、前記画像表示装置に表示する、請求項1から7のいずれか一項に記載の立体映像表示装置の立体スケール像形成装置。
【請求項9】
前記第1の撮像装置と第2の撮像装置は、立体内視鏡のカメラである、請求項1から8のいずれか一項に記載の立体映像表示装置の立体スケール像形成装置。
【請求項10】
請求項9記載の立体映像表示装置の立体スケール像形成装置を備えた立体内視鏡装置。
【請求項1】
第1の撮像装置と第2の撮像装置と、立体画像処理装置と、画像表示装置とを備えた立体映像表示装置において、前記第1の撮像装置と前記第2の撮像装置それぞれの映像の中に長さ目盛を付した立体スケールの画像を形成し、前記立体スケールの視線交差角と前記長さ目盛の大きさとを該立体スケールの位置に合わせて調整して前記画像表示装置に表示し、前記立体スケールを立体視させる立体スケール像演算装置と、表示される前記立体スケールの位置を前記映像中で移動させる操作端を設けた操作盤とを備える、立体映像表示装置の立体スケール像形成装置。
【請求項2】
前記立体スケールの目盛は、前記立体スケールの表示位置と前記第1および第2の撮像装置の主点面との実体上の距離に従って、大きさを調整する、請求項1記載の立体映像表示装置の立体スケール像形成装置。
【請求項3】
前記立体スケールの画像は、寸法の一定したパターンを前記立体スケールの表示位置に配置して撮影した実写画像と対比して立体スケールの目盛の大きさを較正したデータを集積して形成した校正データマトリクスに基づいて形成した、請求項1記載の立体映像表示装置の立体スケール像形成装置。
【請求項4】
前記第1の撮像装置と第2の撮像装置は互いに光軸が交差するように配置され、前記立体スケールの画像は、前記第1および第2の撮像装置の光軸の交差点を含み該光軸に挟まれた角を2分する線に垂直なコンバージェンス面に、該立体スケールの右目用画像と左目用画像を投影したときの距離差を基準として、大きさを調整する、請求項1記載の立体映像表示装置の立体スケール像形成装置。
【請求項5】
前記操作盤は、映像中の該立体スケールの位置を前記光軸の交差点の位置に移動させる操作端を備える、請求項4記載の立体映像表示装置の立体スケール像形成装置。
【請求項6】
前記操作盤は、映像中の該立体スケールの姿勢を調整する操作端を備える、請求項1から5のいずれか一項に記載の立体映像表示装置の立体スケール像形成装置。
【請求項7】
前記操作盤は、映像中の該立体スケールの位置を直交座標系のX軸方向、Y軸方向、Z軸方向に独立に移動させる操作端と、映像中の該立体スケールの回転をロール軸、ピッチ軸、ヨー軸の周りに独立に調整して該立体スケールの姿勢を調整する操作端とを備え、前記立体スケール像形成装置は、ロール軸とピッチ軸とヨー軸の各軸をそれぞれ直交座標系の1軸と組み合わせて、同時にはそれぞれ組み合わされた2軸のみが操作できるようにするモードを有し、前記操作盤が該モードの指定と解除を行う操作端を備える、請求項1から4のいずれか一項に記載の立体映像表示装置の立体スケール像形成装置。
【請求項8】
立体スケールの目盛を実体目盛に対応させる数値情報を集積した校正データマトリクスを記憶装置に格納して、前記立体スケールの位置と姿勢に従って得た該校正データマトリックスの数値情報に基づいて立体スケールの画像を形成し、前記画像表示装置に表示する、請求項1から7のいずれか一項に記載の立体映像表示装置の立体スケール像形成装置。
【請求項9】
前記第1の撮像装置と第2の撮像装置は、立体内視鏡のカメラである、請求項1から8のいずれか一項に記載の立体映像表示装置の立体スケール像形成装置。
【請求項10】
請求項9記載の立体映像表示装置の立体スケール像形成装置を備えた立体内視鏡装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−15721(P2011−15721A)
【公開日】平成23年1月27日(2011.1.27)
【国際特許分類】
【出願番号】特願2009−160664(P2009−160664)
【出願日】平成21年7月7日(2009.7.7)
【出願人】(395011218)エフ・エーシステムエンジニアリング株式会社 (7)
【出願人】(594044646)株式会社エヌエイチケイメディアテクノロジー (20)
【Fターム(参考)】
【公開日】平成23年1月27日(2011.1.27)
【国際特許分類】
【出願日】平成21年7月7日(2009.7.7)
【出願人】(395011218)エフ・エーシステムエンジニアリング株式会社 (7)
【出願人】(594044646)株式会社エヌエイチケイメディアテクノロジー (20)
【Fターム(参考)】
[ Back to top ]