
立体映像表示装置の立体ノギス像形成装置およびプログラム
【課題】立体カメラで撮影した対象物の寸法や他の事物との距離を測定するため、測定位置にポインター先端を当てた立体ノギス像と、演算で求めたポインター先端間距離の数値表示を生成して立体映像表示装置に表示させる立体ノギス像形成装置を提供する。
【解決手段】ディスプレー4に立体表示する2つのポインター像42,43の位置情報を生成して立体映像信号生成装置3に伝送するポインター像表示装置21と、ポインター像の位置を立体画像中で移動させる操作端を備えた操作盤24と、立体画像中のポインターの3次元位置を立体撮像装置1に固定された座標系の座標で表す座標演算装置22と、立体画像中の2つのポインターの座標に基づいて2つのポインターの間の実体距離を算出して立体映像信号生成装置3に伝送しディスプレー4に表示させる距離演算装置23とを備える。
【解決手段】ディスプレー4に立体表示する2つのポインター像42,43の位置情報を生成して立体映像信号生成装置3に伝送するポインター像表示装置21と、ポインター像の位置を立体画像中で移動させる操作端を備えた操作盤24と、立体画像中のポインターの3次元位置を立体撮像装置1に固定された座標系の座標で表す座標演算装置22と、立体画像中の2つのポインターの座標に基づいて2つのポインターの間の実体距離を算出して立体映像信号生成装置3に伝送しディスプレー4に表示させる距離演算装置23とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、立体撮像装置で取得する画像を立体的に表示する立体映像表示装置において、画像に表示された物体の幅や物体間の距離を推定するために使用する立体ノギス像及び幅や距離の数値表示を生成する装置に関する。
【背景技術】
【0002】
近年、立体映像表示装置は著しく発達してきている。立体映像表示装置では、たとえば、視差を持つように左右一対の撮像手段を配置し、撮像された左右一対の画像をモニターに表示し、それぞれの画像を左右の目で別々に捉えて脳で合成することにより、立体視化する。
【0003】
立体視には、左右画像を時分割で交互に表示し、液晶シャッターを備えたメガネで左右画像を交互に観察する時間分割立体表示方式や、左右画像をそれぞれ偏光軸が直交する偏光フィルタを通した上で、同一面に重ねて偏光表示し、左右で偏光軸が直交する偏光フィルタメガネを用いて左右画像に分離する偏光フィルタ眼鏡方式、液晶表示画面の水平1ドットライン毎に偏光方向が90度変化する液晶フィルタなどを設置し左眼用と右眼用の画像を交互に並べ、右回転円偏光板と左回転円偏光板を左右に配置した円偏光メガネで見ることにより分離された左右用の映像をそれぞれ左右の目で同時に見て立体視する円偏光方式など、各種の原理に基づく装置が利用されている。なお、裸眼で立体映像を観察することができる方法もある。
【0004】
映像の立体視化により、被写体に対する識別力が格段に向上する。また、特に医療の現場において立体内視鏡カメラが使用できれば、内蔵疾患の診断や手術を支援する上で大きな効果が期待される。さらに、立体映像中の物体の寸法や物体間の距離を簡単に知ることができれば、的確な診断や手術に大きく貢献することになる。
【0005】
しかし、立体内視鏡カメラから得られる映像は、形状と配置、色が主な情報で、映像として映し出される物体の大きさに関する情報は、直接に得ることはできない。立体カメラと人の目の位置関係は必ずしも対応していないので、特に立体視している対象の寸法や距離を正確に測ることは難しい。したがって、通常は、表示映像内に映し込まれた鉗子など比較対象物に基づいて寸法等を推定することが多い。このように、映像中の対象物についての大きさや距離に関する情報は確実性がない。
【0006】
立体カメラによる撮影方法には、カメラの光軸方向に注目した平行法と交差法の区別がある。しかし、立体視した映像中のある点の位置を求める場合は、いずれも左右両眼に対応するカメラの視線の交わり状況に基づく方法に従うので、本質的な相違はない。ただし、立体視を可能にするためには対象が左右のカメラ視野の両方に含まれている必要があるので、交差法の方が、よりカメラに近い対象まで立体視できる点、また視線の交角がより大きくなるため、視認したときの画像の立体感が大きい点などの利点がある。
特に、立体内視鏡装置では、左右のカメラの間隔が狭いので交差法がよく用いられている。
【0007】
立体内視鏡装置を用いた診断あるいは手術においては、術者が、立体内視鏡カメラにより撮影して表示された立体映像に映し出された患部を立体的に観察して、たとえば、患部の形状や周囲の状況、色などを診断の重要な判断材料とすることが期待される。しかし、患部の寸法や他の贓物との距離などを正確に推定する適当な手段がなく、奥行きを感じさせる立体映像は得られるものの、その寸法や距離は、過去の経験に基づいて類推するしか方法がなかった。また、患部の大きさも、鉗子など一緒に映像に写し込まれた比較対象物により推定するしかないが、位置関係が明確でなく正確に推定することは難しかった。
【0008】
このため、立体内視鏡カメラで撮影した映像を対象として距離画像を生成する手法が求められる。しかし、立体映像表示装置において、立体表示された映像から実物の距離や寸法を感得する簡便な手法は、未だ知られていない。
なお、このような事情は、立体内視鏡装置に限らず、一般に用いられる立体カメラを使用した立体映像表示装置においても同様で、映像中の事物の寸法や相互の距離を正確に求めることが難しい。
【0009】
特許文献1には、計測用目盛発生回路により最適なサイズの計測用目盛をモニター上に描画するようにした立体撮像装置が記載されている。特許文献1に開示された計測用目盛発生回路は、カメラの光軸が交わらない平行法に従って配置された立体カメラを対象として、別途測定される被検物までの距離にしたがって映像の倍率を求め、倍率に対応する目盛を発生させる。
【0010】
特許文献1に記載された立体撮像装置では、観察したい被検物を画像中心部に持ってくると、新しく提供された立体計測装置によりカメラに写った被検物のCCD素子上の位置に基づいて被検物までの距離が自動的に測定され、測定された距離に従い被写体の撮影倍率に対応した計測用目盛が形成される。形成された計測用目盛は自動的にモニター画面に表示されるようになっている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2007−187590号公報(段落0027、0030等)
【発明の概要】
【発明が解決しようとする課題】
【0012】
特許文献1記載の目盛表示は、画像中心部に持ってきた被検物が距離測定された結果に基づいて目盛合わせされるもので、奥行き方向には目盛が与えられない。したがって、別の被検物について寸法を知ろうとすると、その度にカメラの視野を移動して被検物が画像中心部に来るようにして測定する必要がある。
【0013】
しかも、カメラから被検物までの距離は得られても、カメラ視野の移動量を補償しなければ被検物の寸法を知ることはできない。また、任意の2点間距離、特に奥行き方向成分を含む距離を知るために利用することができなかった。
なお、特許文献1記載の目盛表示は、輻輳角とコンバージェンス点までの距離を取り込んだ演算を行うことにより、交差法を用いた立体カメラにも適用することができるが、平行法の立体カメラと同様に、被検体の寸法や2点間距離を知ることはできない。
【0014】
これに対して、本願出願人は、すでに特願2009−160664により、立体映像中に奥行き方向の寸法も表わせる立体スケールを表示する立体スケール像形成装置を提示している。本願出願人が開示した立体スケール像形成装置は、実寸目盛の付いた立体スケール像を映像中の任意の3次元位置に適宜の向きに置くことができる。
【0015】
しかし、本願出願人が先に開示した立体スケール像形成装置によっても、被検物の寸法や2点間の距離を知るためには、操作者が目盛を読み取る必要があり、正確な寸法や距離を得るには多少の熟練を要する。
【0016】
そこで、本発明が解決しようとする課題は、立体カメラで撮影した立体映像の適宜の位置に存在する対象物について、その寸法や他の事物との距離を測定するため、距離を知りたい測定位置にポインターを立てると、ポインター間の距離を求めて、立体映像表示装置に表示させる立体ノギス像形成装置を提供することである。
【課題を解決するための手段】
【0017】
本発明に係る立体ノギス像形成装置は、左目と右目に対応して第1の撮像装置と第2の撮像装置とを備えた立体撮像装置(立体カメラ)と、立体撮像装置からの撮像信号について信号処理して左目と右目に対応する画像信号をそれぞれ生成する画像信号生成装置と、左目と右目に対応する画像信号を合成して立体映像表示するための立体映像信号を生成する立体映像信号生成装置と、立体映像信号に基づいて、立体視できる映像を立体表示するディスプレーとを備えた立体映像表示装置に適用する装置である。
【0018】
上記課題を解決するため、本発明に係る立体ノギス像形成装置は、ディスプレーに表される立体画像中に表示されるポインターの位置を指定する操作端を備える操作盤と、ポインターの位置情報を生成して供給するポインター像表示装置と、ポインターの位置情報を入力して立体撮像装置に固定される座標系においてポインターの3次元位置を表す座標値を算定する座標演算装置と、立体画像中の2つのポインターについて算定された座標値に基づいて上記2つのポインター間の実体距離値を算定して供給する距離演算装置と、を備え、立体映像信号生成装置が、ポインターの位置情報を入力して第1の撮像装置による画像と第2の撮像装置による画像のそれぞれにポインターの像を加えた画像信号を生成してディスプレーに伝達し、また、2つのポインターの間の実体距離値を入力して数値表示する画像信号を生成してディスプレーに伝達し、ディスプレーがポインターの像と2つのポインター間の実体距離値を表示することを特徴とする。
本発明の立体ノギス像形成装置は、さらに、立体ノギス像表示装置を備えて、2つのポインターの位置を測定長の端点とする立体ノギス像を形成してディスプレーに立体表示させるようにしてもよい。
【0019】
また、上記課題を解決するため、本発明に係る立体ノギス像形成プログラムは、立体ノギス像形成装置におけるコンピュータを、ディスプレーに立体表示する第1のポインター像と第2のポインター像の位置情報を生成して立体映像信号生成装置に伝送するポインター像表示手段と、ポインター像の位置を立体画像中で移動させる操作端から入力された信号に基づいて、ポインターの位置を立体画像中で移動させる手段と、立体画像中のポインターの3次元位置を立体撮像装置に固定された座標系の座標で表す座標演算手段と、立体画像中の2つのポインターについて指定された座標に基づいて2つのポインターの間の実体距離を算出して、ディスプレーに表示させるため、算出した実体距離の情報を立体映像信号生成装置に伝送する距離演算手段として機能させることを特徴とする。
さらに、本発明のプログラムは、立体ノギス像形成装置におけるコンピュータを、第1と第2のポインターの位置にアンビルとスピンドルの先端を合わせた立体ノギス像を形成してディスプレーに立体表示させる立体ノギス像表示手段として機能させるようにしてもよい。
【0020】
オペレータは、ディスプレーの立体映像を観察して、本発明に係る立体ノギス像形成装置により立体映像中に表示される立体ノギス像のアンビルとスピンドルの位置すなわち測定距離の端点の位置を、操作盤を用いて3次元的に移動させて、立体映像中の対象物について寸法を知ろうとする部分や立体映像中で距離を測りたい位置を示す任意の2点を指定することができる。2点間距離はディスプレーに逐次表示されるため、対象物の寸法や距離は直ちに知ることができる。
なお、立体ノギス像が立体表示されるため、立体ノギス像の各部が立体映像中の奥行き距離に対応する大きさを有するので、立体ノギス像を観察することにより立体ノギスが当てられた対象物の位置を直感的に把握することができる。
【0021】
交差法を用いた立体撮像装置に固定される座標系は、2つの撮像装置の光軸が交差する輻輳角を2等分する2等分線を1つの座標軸(Y軸)とする直交座標系であることが好ましい。特に、2つの撮像装置の光軸が含まれる面に、すなわち2つの撮像装置が並ぶ方向に、第2の座標軸(X軸)を持つようにすることができる。さらに、2つの撮像装置の光学系の主点を結ぶ線分の中点に原点を配置した座標系を用いると、座標計算や距離計算を簡素化することができる。なお、原点を、2つの撮像装置の光軸が交差する点であるコンバージェンス点に配置してもよい。
【0022】
オペレータが設定するポインターの座標は、左目に見せる画像と右目に見せる画像としておのおのディスプレーに表示する基準映像画面の中のポインターの表示位置に基づいて、演算で簡単に求めることができる。また、ポインターの3次元位置から、基準映像画面の中のポインターの表示位置を求めることも容易である。
基準映像画面は、たとえば、第1の撮像装置と第2の撮像装置の光軸が交差するコンバージェンス点にY軸に垂直に設けられたコンバージェンス面に設定される。左目に見せる画像と右目に見せる画像におけるコンバージェンス点の映像は、ディスプレーにおいて同じ点に重なることになる。
ポインターの位置を立体映像撮影に使う立体撮像装置に固定される3次元座標で求めると、2つのポインター間の距離は演算で簡単に求めることができる。
【0023】
オペレータは、操作盤を操作することにより、立体ノギス像の測定先端(アンビル)の位置を簡単に調整することができる。オペレータが、対象とする被測物と立体ノギス像が表示された映像を観察しながらそれぞれのポインターの位置を目的物に合わせると、アンビルを2つのポインターに合わせた立体ノギス像が表示されると共に、2個のポインター間の実体距離が自動的に表示される。ポインターと目的物の位置が3次元的に合致したか否かは、ディスプレーに表示された画像を立体視するオペレータの視覚によって判定することができる。
【0024】
なお、演算装置が実体距離を算出して表示するときには、たとえば原点とコンバージェンス点の距離を基準値として与えることにより、立体撮像装置に固定される座標系の座標値と実寸の間で正確に換算を行うことができる。
また、立体撮像装置の光学系が異なれば座標系も異なるので、立体撮像装置ごとに固有の座標系を作成するときに、実寸に関連付けられた基準立体スケールを、コンバージェンス点など、基準の位置に配置して立体撮像装置で撮影して得られた映像に基づいて、目盛を実際の寸法と対比して校正するようにしてもよい。
【0025】
なお、本装置によればポインター間の距離は簡単に算出できるので、ポインターの位置を移動させる間も立体ノギス像を追従させると共に、リアルタイムにディスプレーに距離を表示することができる。
また、立体ノギス像の形状は、立体撮像装置からの距離あるいはY座標値にしたがった大きさで表示すると、対象の遠近感が的確に把握できて正確な観察が可能になる。
【0026】
立体カメラが映し出す映像にオーバーライドされる立体ノギス像の位置を制御するための操作盤は、オペレータが映像を観察しながら操作できるばかりでなく、たとえば、術者の指示で補助者が間違いなく操作したり、収録された立体映像を後日分析する場合に正確に操作したりできることが要求されるので、再現性がよく、簡単に操作できるものであることが好ましい。
【0027】
操作盤には、ポインターについて直交座標系の3軸方向の運動をそれぞれ指定する操作端と、1操作で直ちに基準位置に戻すことができる操作端を備える。ポインターまたは立体ノギス像の基準位置は、2つの撮影装置の光軸の交差点すなわちコンバージェンス点であることが好ましい。
【0028】
操作盤には、さらに、立体ノギスの測定軸方向を固定したままポインター間距離を伸縮させるダイアルを備えると便利である。また、ポインターの選択に使うスイッチや位置確定の指示を行うためのスイッチなどを搭載することもできる。なお、マウスやジョイスティックなど、常用されるポインティングデバイスをこれら操作端やスイッチ類の代わりに利用することもできる。
また、操作盤にトラッキングボールなどの操作端を設けて、立体ノギス像が映像を観察するために障害となる場合には、立体ノギス像の姿勢を簡単に変化させることができるようにすると、より便利である。
【0029】
立体撮像装置を取り換えるときは、立体映像表示装置に新しく組み合わせる立体撮像装置について予め較正した測定パラメータを選択して適用することができる。較正した測定パラメータはデータベースとして記憶装置に格納しておいて、切り換え時に新しい立体撮像装置に適合する設定値のセットを読み出して適用するようにしても良い。こうすることにより使用前の調整時間を節約することができるので、たとえば、立体内視鏡を用いた手術を行う場合など、術者の執刀前の準備時間を短縮して、他の作業に注力する余裕が与えられるので好ましい。
【0030】
なお、ポインター像表示装置と座標演算装置と距離演算装置とは、論理を実行する電子回路により構成することができるが、プログラムで制御することによりそれぞれの機能を遂行するようにした汎用または専用のコンピュータによって構成することもできる。
本発明に係る立体ノギス像形成装置は、上記構成を有する既存の立体映像表示装置に対しても、立体ノギス像形成装置を追加することにより、適用することができる。なお、立体ノギス像形成装置がコンピュータを機能させるためのプログラムで構成される場合は、既存の立体映像表示装置の制御装置にこのプログラム及び操作盤を追加することにより、本発明を適用することができる。
また、本発明の立体ノギス像形成装置は、立体映像(動画)に対して適用できるが、立体静止画像についても利用できることは言うまでもない。
【発明の効果】
【0031】
本発明に係る立体映像表示装置の立体ノギス像形成装置は、オペレータが画像中の対象物体の映像に対して立体ノギス像のポインター位置を指定することにより、対象物の寸法や適宜の2点間距離など、ポインター間の正確な距離を簡単に得ることができる。
特に、立体内視鏡装置を用いて患部の観察や手術を行うときには、本発明に係る立体ノギス像形成装置を用いることにより、術者が画像中に表示された患部などの寸法や対象物間の距離を簡単に知ることができるので補助装置として有用である。
【図面の簡単な説明】
【0032】
【図1】本発明の1つの実施形態に係る立体映像表示装置の立体ノギス像形成装置の構成図である。
【図2】本実施形態におけるディスプレーの表示例を示す概念図である。
【図3】本実施形態におけるディスプレーの立体ノギス像の表示例を示す概念図である。
【図4】本実施形態に係る操作盤の斜視図である。
【図5】本実施形態に係るポインターをY軸方向に移動したときの立体ノギス像の変化例を示す斜視図である。
【図6】本実施形態における立体撮影装置の第1の撮像装置と第2の撮像装置に対する基準図形の位置と表示大きさとの関係を説明する斜視図である。
【図7】本実施形態に係る立体ノギスのポインター位置と左右の撮像装置の視線の関係を説明する平面概念図である。
【図8】本実施形態に係る立体ノギスのポインター位置と左右の撮像装置の視線の関係を説明する側面概念図である。
【図9】本実施形態に係る任意の点の座標と立体視化する画像上の対応点の関係を説明する概念図である。
【図10】本実施形態に係る立体ノギスのポインターを立体表示するときの左右の画像面を説明する概念図である。
【図11】本実施形態に係る立体ノギス像の使用手順を説明するフロー図である。
【図12】本実施形態の立体ノギスのポインター位置設定手順を説明するフロー図である。
【発明を実施するための形態】
【0033】
以下、本発明に係る立体映像表示装置の立体ノギス像形成装置について、図面を参照しながら詳しく説明する。なお、図面においては、同じ機能を有する構成部材については同じ参照番号を付して説明を簡約にし、説明の重複を避けた。
【0034】
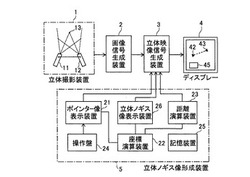
図1は、本発明の1つの実施形態に係る立体ノギス像形成装置を用いた立体映像表示装置の構成図である。本実施形態の立体ノギス像形成装置を適用した立体映像表示装置は、立体撮像装置1と画像信号生成装置2と立体映像信号生成装置3とディスプレー4と立体ノギス像形成装置5とを含んで構成される。
【0035】
立体撮像装置1に含まれる第1の撮像装置11と第2の撮像装置12は、ほぼ同じ性能を有するカメラで、固定の主点間距離をおいて結合され、左右一対の撮像装置は、視差を持つように配置され、左右一対の画像を撮像して撮像信号を出力する。本実施形態におけるように交差法を利用する場合は、一対の撮像装置の光軸が輻輳角をもって交わるため前方の決められたコンバージェンス点13で交差するように配置される。
立体撮像装置1は、立体内視鏡のプローブ先端に設けられた1対のカメラであっても良い。
【0036】
第1の撮像装置11と第2の撮像装置12が生成した撮像信号は、画像信号生成装置2に入力される。画像信号生成装置2は、撮像装置11,12から入力された撮像信号を信号処理して、それぞれのカメラごとに画像信号を生成する。図において、第1の撮像装置11からは左目で見るための画像が生成され、第2の撮像装置12からは右目で見るための画像が生成される。
画像信号生成装置2から出力される左目用と右目用の1対の画像信号は、立体映像信号生成装置3により合成されて、ディスプレー4に立体映像として表示するための立体映像信号となり、ディスプレー4に送信される。
【0037】
ディスプレー4では、左目用の画像は左目で見えるように、また右目用の画像は右目で見えるように表示する。左目用画像と右目用画像に分離した一対の画像を、コンバージェンス点13における映像が重なるように配置することにより、2つの画像から実物像を立体視することができるようになる。
【0038】
立体視化の方法は、たとえば、右目用画像と左目用画像を交互に切り換え表示し、これと同期してオンオフする液晶シャッタメガネなど専用の立体メガネで観察する時間分割立体表示方式や、偏光軸が直交する偏光フィルタを通して左右の画像をプロジェクタに投射して同一画面に重ねて表示し、偏光フィルタ眼鏡で左目用画像と右目用画像に分離する偏光フィルタ眼鏡方式や、液晶表示面の水平走査ライン毎に偏光方向が90度変化する液晶フィルタを設置し、液晶表示面に左眼用と右眼用の画像を水平走査ライン毎に交互に並べて、右回転円偏光板と左回転円偏光板を左右に配置した円偏光メガネで見ることにより分離された左右用の映像をそれぞれ左右の目で同時に見て立体視する円偏光方式など、色々な方法が知られている。
【0039】
立体ノギス像形成装置5は、ポインター像表示装置21、座標演算装置22、距離演算装置23、操作盤24、記憶装置25、立体ノギス像表示装置26を含んで構成される。
オペレータが操作盤24を用いて指定するポインターの位置情報は、ポインター表示装置21で生成され、ポインター表示装置21から立体映像信号生成装置3に送信される。立体映像信号生成装置3は、立体撮像装置1で生成された撮像信号から画像信号生成装置2で左右の目用にそれぞれ生成された画像信号と、受信したポインターの位置情報を合成して、立体撮像装置1で取得した対象物の立体画像とポインターの立体画像が重なった立体映像信号としてディスプレー4に表示させる。
【0040】
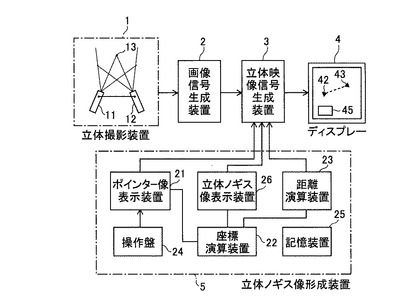
図2は、ディスプレー4の表示面41における表示例を示す概念図である。表示面41には、左右両眼の視差に基づいて奥行きを判断する視差法に基づいた立体像46が表示されている。
ディスプレー4の表示面41には、第1の撮像装置11から供給される左目用の画像と第2の撮像装置12から供給される右目用の画像が両方表示されている。このような表示から立体像46を得るには、左目用の画像と右目用の画像を分離して、左目と右目で別々に見ることが必要になる。
【0041】
立体視には、先に述べた通り、時間分割立体表示方式や偏光フィルタ眼鏡方式など、いくつかの方法があるが、本実施形態では、2枚の画像を並べてそれぞれ別の目で見て立体視化する視差法であれば具体的な方法を問わない。
【0042】
図2に示された表示面41には、さらに2つのポインター42,43とポインター間を繋ぐ結合線44で代表する立体ノギス、およびポインター42,43の実体距離を表示する距離表示枠45が立体表示されている。図2では、2つのポインター42,43は物体像46の輪郭でなく、その内部における知りたい寸法の端点を3次元的に指示している。
また、ポインター42,43は、ポインターのある位置が近いほど大きく、遠いほど小さく表示して、距離感の直感的な把握を容易にするようにしてもよい。
【0043】
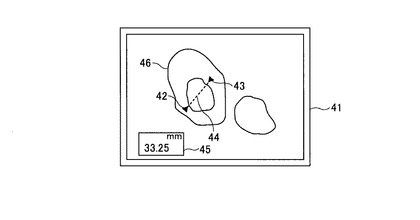
なお、画像のリアリティを向上させるために、2つのポインター42,43とポインター間を繋ぐ直線44でノギスを代表する代わりに、ノギス像を立体表示することができる。図3は、マイクロメータに似せてフレーム48やバーニア49を備えたノギス形状をデザイン化した立体表示用のノギス像47の例を示す。ノギス像47はコンピュータグラフィックス(CG)を使って、ディスプレー4の画面中に立体的に表現される。
【0044】
ポインター42,43には、ノギス像47のアンビル38とスピンドル39(ノギスのジョーに当たる)が当接され、2つのポインター42,43を結ぶ結合線44の上にノギス像47の測定軸Yn軸が設定されている。距離や間隔の測定はYn軸に沿って行う。また、操作盤24にトラッキングボール37などポインタデバイスを備えて、ポインタデバイス37を操作することにより、Yn軸を回転軸としてフレーム48の傾きを加減して、背景の立体映像の邪魔にならないようにすることができる。なお、立体表示するノギス像47は、背景映像の邪魔にならないように半透明に表示してもよい。
【0045】
操作盤24を使ってポインター42,43をそれぞれ対象の測定位置に当接させると、座標演算装置22によりそれぞれの座標が算定され、立体ノギス像表示装置26によりポインター位置に対応する立体ノギス像のグラフィックスが形成され、距離演算装置23によりポインター間の距離が算定される。形成された立体ノギス像の表示情報と求められた距離は立体映像信号生成装置3に送信され立体映像信号に組み入れられて、立体ノギス像は表示画面41中に立体表示され、距離値は表示画面41中の距離表示枠45に表示される。
なお、距離表示枠45は立体表示する必要がないので、平面的に表示するようにしてもよい。
【0046】
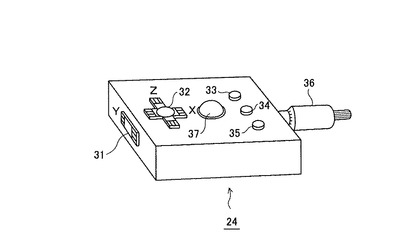
図4は、本実施形態の立体ノギス像形成装置に用いられる操作盤の例を示す斜視図である。操作盤24は、ノギスの当て方、すなわちポインターの立体位置、を指定する装置である。
図4に示すように、操作盤24には、シーソーキー31と、十字キー32と、いくつかの押しボタンスイッチ33,34,35と、ラチェットストップ付きバーニア36とが配置されている。操作の自由度を上げるため、トラッキングボール37や図示しないジョイスティックなどをさらに設けてもよい。
【0047】
シーソーキー31は、ポインターの奥行き方向(Y軸方向)の移動を指示するスイッチである。シーソーキー31は、操作盤24の側面に設けられ前後方向にスイングするスイッチで、シーソーキー31の向側の端部を押し込めば指定されたポインターが遠方に(Y軸正方向に)表示されるようになり、手前側の端部を押し込めばポインターが手前に近づく方向(Y軸負方向)に移動する。実際には、たとえば、立体撮像装置に固定された座標系におけるポインターのY座標値を増減することでY軸方向に移動させることができる。
シーソーキー31は押し込み深さや押し込み継続時間によってポインターの運動方向と速度を指定するものであっても良い。
【0048】
十字キー32は、操作盤上面に設けられ2方向にスイングして、画像中のポインターの横方向(X軸方向)と縦方向(Z軸方向)の移動を指示するスイッチで、直交配置された2個のシーソーキーと等価なスイッチである。十字キー32の横方向の腕は、たとえばX座標値を増減することによってポインターの横方向の運動制御を行い、腕の右側を押し込めば、ポインターは横方向右側(X軸正方向)に移動し、左側を押し込めばポインターは横方向左側(X軸負方向)に移動する。また、縦方向の腕は、たとえばZ座標値を増減することによって画像中のポインターの縦方向の運動制御を行い、腕の上側を押し込めば、ポインターは上の方向(Z軸正方向)に移動し、下側を押し込めば、下の方向(Z軸負方向)に移動する。なお、十字キー32は、長押しにより上の通り決められた方向に高速移動するように構成しても良い。
【0049】
押しボタンスイッチ33,34,35は、ボタンを押すことにより、ポインターの位置決定や、ポインターの初期位置に戻す指令や、操作するポインターの選択などを行うスイッチである。なお、押しボタンスイッチは、必要に応じて、4個以上設けても良い。
ラチェットストップ付きバーニア36は、操作盤24の側面に設けられ、立体ノギス像のアンビル38とスピンドル39を結ぶ方向を変えずに、距離を増減するために使用する。マイクロメータにおけるバーニアと同じ機能を担わせたものである。
【0050】
オペレータは、操作盤24のシーソーキー31と十字キー32により、ポインターの位置を映像中の任意の位置に移動させることができる。ポインターの位置は、立体撮像装置に固定された直交座標系のXYZ座標で表わすことができる。ここで便宜のため、座標系の原点を2つの撮像装置における光学系の主点同士を結ぶ線分の中点に置き、X軸を主点同士を結ぶ線分の上に、Y軸を原点とコンバージェンス点13を結ぶ線の上に、Z軸をX軸とY軸に垂直な方向に取ったXYZ直交座標系を用いるものとする。
【0051】
2つのポインター42,43の3次元位置が決まれば、これらポインターにアンビル38とスピンドル39を当接させた立体ノギス像47は容易に形成され、ポインター間を結ぶ直線は簡単に描くことができ、ポインター間の距離も与えられる。ポインター42,43の3次元位置を決めるには、各ポインターについて3自由度を調整するシーソーキー31と十字キー32があれば足りる。
【0052】
なお、ポインターの移動を行う操作端として、トラックボール37やジョイスティックで、シーソーキー31と十字キー32の組み合わせに代替することもできる。これらは、操作性に差があり、操作する者の嗜好もあるので、選択できるようにしておいてもよい。
また、トラッキングボール37は、立体表示したノギス像47のフレーム48の影が映像の観察に邪魔になるときに、立体表示したノギス像47の回転軸(Yn軸)を中心としてフレーム48を回転させるために使用するようにすることができる。
【0053】
立体ノギス像の形態は、2次元の画面中のポインターの位置だけでは決まらず、3次元位置にしたがって定まることは、いうまでもない。また、立体ノギス像の形状は、立体撮像装置からの距離あるいはY座標値にしたがった大きさで表示することができる。
たとえば、図5は、ポインターが画面中の距離を変えずにY軸方向に移動したときに、立体ノギス像が変化する様子を説明する図である。また、図6は、立体撮影装置の第1の撮像装置と第2の撮像装置に対する基準図形の位置と表示大きさとの関係を説明する斜視図である。
【0054】
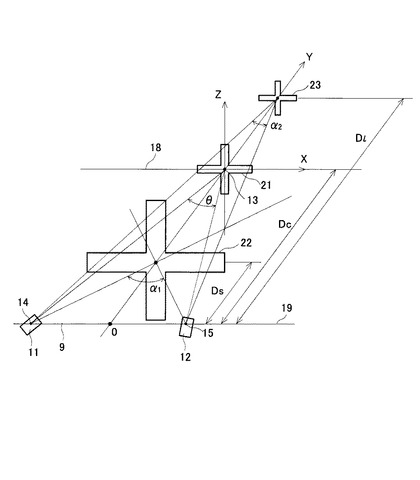
図6は、基準立体図形を、第1の撮像装置11の光軸と第2の撮像装置12の光軸が交わって形成するコンバージェンス点13と、2つの撮像装置の主点14,15の中間点Oとを結ぶY軸上に置いたときに、表示装置4に投影される立体図形の像21,22,23の大きさがY軸上の位置により変化する状態を示す。
図6に示すように、コンバージェンス点13の位置に、2つの撮像装置の光軸を含む面に垂直なコンバージェンス面18を想定する。ここで、第1の撮像装置11と第2の撮像装置12のたとえば主点14,15同士を結ぶ線を基準線19とし、基準線19からコンバージェンス面18までの距離をDcとする。
【0055】
コンバージェンス面18に立体図形が存在するとき、ディスプレー4に表示される立体図形像21は、光学系と電子回路と表示装置などにより規定される所定の倍率が掛かった所定の大きさを有するものになる。
立体図形像22は、基準立体図形がコンバージェンス面18より撮像装置に近い位置にあるものとして表示されたときの像である。ここで、基準線19から立体図形像22に対応する基準立体図形までの距離をDsとすると、立体図形像22の大きさは、コンバージェンス面18にあるものとして表示される立体図形像21のDc/Ds倍に拡大して表示される。
【0056】
また、立体図形像23は、基準立体図形がコンバージェンス面18より撮像装置から遠い位置に配置されたときの像である。ここで、基準線19から立体図形像23に対応する標準図形までの距離をDlとすると、立体図形像23の大きさは、コンバージェンス面18にあるものとして表示される立体図形像21のDc/Dl倍に縮小して表示されることになる。
【0057】
こうして、同じ大きさの対象物であっても、撮像装置2からの距離が変化すれば、シスプレー4に表示される像の大きさが距離に対応して規則的に変化して、映像観察者に映像中の像の遠近感覚を的確に喚起させることができる。
したがって、距離あるいは間隔を測定する立体ノギスの像に対して上記説明の通り距離に従って大きさを変化させるようにして、測定対象に当てた立体ノギスの像を観察することにより、直感的に測定対象の奥行き位置を推察できるようにすることができる。
【0058】
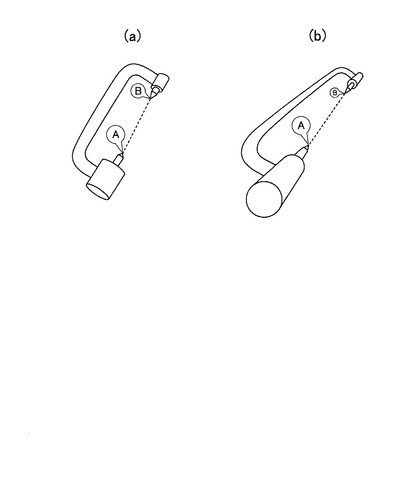
図5(a)は、本実施例における、ポインターAとポインターBがほぼ同じXZ面上に存在する場合の立体ノギス像を示す。図5(b)は、図5(a)におけるポインターAとポインターBが画面中のほぼ同じ位置に見えるにもかかわらず、ポインターBが奥行き方向のY軸に沿って遠ざかった状態にある場合の立体ノギス像を示している。
【0059】
図5(a)では、ポインターBに合わせられたアンビル部分はポインターAに合わせられたスピンドル部の大きさに近くなっている。これに対して、図5(b)では、ポインターBに対応するアンビルの像が距離に対応して小さくなり、フレームがアンビルに近い方で細くなり、かつ立体ノギス像が傾いていることから、画面中のポインターAの像とポインターBの像の距離が変化しなくても、ポインターBが遠ざかっていることが直感的にも明らかである。
【0060】
ポインターの奥行き位置が異なる場合でも、ポインターAとポインターBの座標値を用いることにより、両ポインター間の距離は正しく求めることができるが、本実施例では、立体ノギス像を立体撮像装置からの距離あるいはY座標値にしたがった大きさで表示することにより、対象の遠近感が的確に把握でき、直感的な観察が可能になる。
また、ポインターA,Bにラベルを付して、そのラベルの大きさを遠近に従って変更することも、対象の遠近を直感的に観察するために有効である。
【0061】
なお、立体ノギスやポインターのラベルの表示寸法は、Y座標値に対応して演算に基づいて決めることができるが、基準立体スケールを立体撮像装置で撮影してY座標と寸法の関係を実地で確認した結果を利用することもできる。
たとえば、所定の形状をした基準の立体スケールを光軸上の適宜の位置に配置して実写することにより、撮影した位置すなわちY座標位置における画像中の立体スケール像の大きさが確定する。したがって、適当な範囲において、複数の異なる位置で撮影した結果を使って、使用範囲内の実物と映像の大きさの換算係数を求めることができる。なお、中間位置については補間計算により妥当な係数を得ることができる。
こうして得られた換算係数は、光学系の非線形性などの影響や不測の外乱も含めた結果であるので、実態と整合させるために複雑な補正演算を行う必要がない。
【0062】
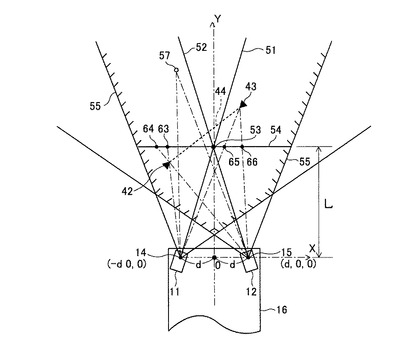
図7は、立体ノギスのアンビルとスピンドルの位置を定めるポインターの位置と、左右の撮像装置の視線の関係を説明する平面概念図、図8はその側面概念図である。表示された実施例では、左目用撮像装置11と右目用撮像装置12は立体内視鏡の先端筒16に収まっているものとする。
左目用撮像装置11の主点14と右目用撮像装置12の主点15を適宜の距離2dだけ離して左目用撮像装置11と右目用撮像装置12の位置が固定される。左右一対の立体画像は、両者の光軸がコンバージェンス点53で交差するようにした交差法により撮像される。
【0063】
立体映像化するためには、その部分の映像が2つの撮像装置11,12のいずれの撮像画面にも入っている必要がある。したがって、立体視化可能な領域は、2つの撮像装置の視野55が重なる図中斜線で影を付けた部分になる。図8の側面図では、上下方向の視野56により制限される図中斜線で影を付けた領域となる。
【0064】
なお、立体撮像装置1に固定され2つの撮像装置の主点14,15を結ぶ線分の中点に原点Oを配置した直交座標系の座標で表現すれば、左目用の第1撮像装置11の主点14は(−d,0,0)の位置、右目用の第2撮像装置12の主点15は(d,0,0)の位置にあることになる。
【0065】
立体視可能な領域内に設定した第1のポインター42および第2のポインター43は、それぞれ第1撮像装置11からポインター42,43を見た視線がコンバージェンス点53におけるXZ面(コンバージェンス面)54に投影された点63,65を左目用画像における指示ポイントとして、ディスプレー4に表示させるようにする。
【0066】
また、第2撮像装置12からポインター42,43を見た視線がコンバージェンス面54に投影された点64,66を右目用画像における指示ポイントとして、ディスプレー4に表示させるようにする。
こうしてディスプレー4に表示された指示ポイントを両眼で立体視すると、第1のポインター42と第2のポインター43が立体映像中のそれぞれの実体位置に存在するように見ることができる。
【0067】
図9は、適宜の位置にあるポインターなどの点の座標と、左右の撮像装置から見通す視線がコンバージェンス面と交わる位置の座標の関係を説明する図面である。
図7,図8に表された第1のポインター42が、図9に示す位置P(X,Y,Z)にあるとして、第1撮像装置11から第1のポインター42を見た視線をコンバージェンス点53におけるXZ面(コンバージェンス面:Y=L)に投影した点Clの座標が(Xl,L,Zc)となり、第2撮像装置12から第1のポインター42を見た視線をコンバージェンス面に投影した点Crの座標が(Xr,L,Zc)となるとする。ここで、第1撮像装置11と第2撮像装置12の主点間距離は2dであり、主点間接続線とコンバージェンス点53との距離はLである。
【0068】
図9に示された、相似比Y:(L−Y)の相似三角形から、Y:(L−Y)=2d:(Xl−Xr)であるから、
Y/L=2d/(2d+Xl−Xr)
相似比Y:Lの多数の相似三角形から、
Z/Zc=Y/L
X/(Xl+Xr)=Y/L
なる関係が成立することから、Cl(Xl,L,Zc)とCr(Xr,L,Zc)の座標が分かれば、簡単にP(X,Y,Z)の座標が求められることが分かる。
【0069】
ちなみに、X,Y,Zは下の式で求められる。
X=d(Xl+Xr)/(2d+Xl−Xr)
Y=2dL/(2d+Xl−Xr)
Z=2dZc/(2d+Xl−Xr)
すなわち、ポインターを立体視化するための左目用画像と右目用画像には、ポインターを見通すカメラの視線がコンバージェンス面(Y=L)に投影されたときの座標がCl(Xl,L,Zc)およびCr(Xr,L,Zc)として与えられるので、実体に対応するポインターの位置P(X,Y,Z)の座標が論理的に求められる。
【0070】
また、逆に、P(X,Y,Z)の座標が与えられれば、Cl(Xl,L,Zc)とCr(Xr,L,Zc)の座標が論理的に求まる。
ちなみに、Zc,Xl,Xrは下の式で求められる。
Zc=ZL/Y
Xl=(XL―d(L−Y))/Y
Xr=(XL―d(L+Y))/Y
したがって、ポインターの位置Pが与えられたときに、そのポインターを立体視させるための左目用画像と右目用画像を理想的に生成することができる。
なお、より現実的には、たとえば本願出願人が開示した特願2009−160664に記載された手法を用いて、基準パターンを実写した結果得られる座標空間で左右の画像を生成することもできる。
【0071】
立体ノギスを使用して対象物の径や距離を測定するときは、オペレータは、図4に例示した操作盤24を操作して、第1ポインター42と第2ポインター43の立体位置を定める必要がある。操作盤24の押しボタンスイッチを使って第1ポインター42を選択すると、ポインター像表示装置21の働きにより、第1ポインター42は初めに基準点となるコンバージェンス点53の位置、すなわち座標(0,L,0)の位置に移動する。コンバージェンス点53は左目用と右目用の画像面における共通中心点である。
【0072】
そこで、オペレータは、操作盤6のシーソーキー31と十字キー32を操作して、第1ポインター42をXYZの各方向に動かして目標の位置Pに移動させる。
シーソーキー31は、たとえば、Y値を増減する指令をポインター像表示装置21に送信して、ポインターの位置をY軸方向に動かさせる機能を有する。また、十字キー32は、ポインター像表示装置21におけるX値とZ値をそれぞれ増減させて、ポインターの位置をX軸とZ軸の方向に移動させる機能を有する。
【0073】
ポインター像表示装置21は常にポインターの座標値を使ってポインターの立体画像情報を生成して、立体映像信号生成装置3に送っているので、移動中に変化する座標(X,Y,Z)は逐一、撮像装置11,12のポインターを見通す視線がコンバージェンス面54上に投影される位置に反映されるので、いつでもポインターの立体視ができる。
【0074】
オペレータは、立体視したポインターの3次元位置と立体画像中の対象物の3次元位置とをディスプレー4の立体映像画面41中で目視により比較して、ポインターが目標位置に到達したと判断できるところまで移動させると押しボタンスイッチを操作して、第1ポインター42の位置を確定する。第1ポインター42の位置が確定したときには、同時に虫ピンのようなピン画像を確定位置に立てて、目印にするようにしてもよい。
【0075】
また、目印のピン画像は、先に画像中の対象物の位置に立てておいて、ピンをめがけてポインターを誘導するような利用方法もある。
なお、上記手順では、第1ポインター42の位置を合わせるために、静置したカメラの画面中でポインターを動かしたが、カメラの画像中にポインター位置を固定して、カメラの撮影方向や対象までの距離を変化させて、第1ポインター42の位置合わせを行うこともできる。
第1ポインター42には、図3に示したようなマイクロメータ型の立体ノギス像47のアンビル38が当接して、第1ポインター42の移動に追従して立体ノギス像を移動あるいは変形させている。
【0076】
次に、第2ポインター43を選択すると、第2ポインター43も初めに基準点であるコンバージェンス点53(0,L,0)の位置に移動する。そこで、第1ポインター42と同様にシーソーキー31と十字キー32を操作して、第2ポインター43の目標位置まで移動させてから、押しボタンスイッチを操作して位置決定する。
第2ポインター43には、マイクロメータ型立体ノギス像47のスピンドル39が当接して、第2ポインター42が移動すると、これに追従して立体ノギス像を移動あるいは変形させている。
【0077】
ポインター間の位置関係を分かりやすくするため、第1ポインター42と第2ポインター43の間は、画面上、常に結合線44で結合させておいてもよい。結合線44は、背景となる映像が見えるように薄い透明色の線で表示されることが好ましい。
また、ポインター42,43の座標値は常時把握されているので、移動中においても距離演算装置23によって2つのポインターの間の距離を算定することができる。したがって、演算結果が立体映像信号生成装置3に送信され、ディスプレー4の表示面41における距離数値表示45に移動中における両者間の距離値が表示されるようにすることができる。
【0078】
また、シーソーキー31や十字キー32は直交座標系の各軸に沿って移動させるが、ポインター42,43が挟む測定対象物が膨張縮小した場合など、測定方向が変化しないときには、座標軸ごとの動きでなく、ポインター間の距離のみを直接変更するため、操作盤24におけるラチェット付きバーニア36を操作することができる。バーニア36は、使い慣れているマイクロメータの操作部と同じ物であるので、オペレータにとって扱い馴れているという利点がある。
【0079】
さらに、操作盤24には、リセット用の押しボタンスイッチが設けられていて、ポインターの位置が大きくずれたときや、撮影対象を変えたときなどに操作すると、ポインターの位置を一挙にコンバージェンス点53などの基準位置に移動させることができる。この機能があることにより、対象が画面中の離れた場所に移ったときにも、迅速なポインターの位置指定が可能になる。
【0080】
図10は、1対のポインター42,43に対応する立体ノギスの立体表示を可能にするための、左目用画像と右目用画像の概念を説明する図面である。図10(a)は立体ノギスの左目用画像、図10(b)は同じ立体ノギスの右目用画像である。なお、簡単のため、図では、立体ノギス像のアンビルとスピンドルを黒塗りの三角形で代表し、立体ノギス像の表示を省略している。
図10(a)に示した立体ノギスの左目用画像61は、第1撮像装置11で撮影した左目用映像と一体となって、ディスプレー4に表示されたときに人の左目で観察される部分となる。また、図10(b)の立体ノギスの右目用画像62は、第2撮像装置12で撮影した右目用映像と一体となって、ディスプレー4に表示されたときに人の右目で観察される部分となる。
【0081】
図7,図8などを参照して分かるように、図10に表示された点63,64:65,66は、実際の3次元位置の点42:43を撮像装置11,12から見た視線がコンバージェンス面54(y=L)に当たる位置として表示される。図10(a)と図10(b)の画像61,62は、第1ポインター42および第2ポインター43のコンバージェンス面54における投影図ということもできる。図10(a)と図10(b)の画像61,62は、ディスプレー4に表示されて、左右の目でそれぞれ見た画面が脳で合成されることにより、立体ノギスを立体的に観察されるようにするものである。
【0082】
なお、図10(a)の左目用画像61と図10(b)の右目用画像62を比較すると、1つの点について表示する各点の高さ(Z値)は左目用画像61と右目用画像62で同じ値になる。そして、X値が左目用画像61における値より右目用画像62における値が大きいときは、その点が表すポインター位置がコンバージェンス面54より撮像装置1に近く、右目用画像62における値が小さいときは、ポインター位置がコンバージェンス面54より遠いことが分かる。
【0083】
図10には、両画像において中心位置に当たるコンバージェンス点53と図7と図8に表わした適宜な点57も一緒に表わされている。
なお、ここでは、2つの撮像装置の主点の中点に原点を置いた直交座標系を使って説明をしているが、座標変換可能な他の座標系を使う場合でも、本質的に等価であることはいうまでもない。
【0084】
図11は、本実施形態に係る立体ノギス像の使用手順を説明するフロー図、図12は、本実施形態の立体ノギスのポインター位置設定手順を説明するフロー図である。
立体ノギスを使用するのに先立って、ノギスを当てる対象となる被測物の立体撮影を行う(S01)。立体撮影は、第1撮像装置11と第2撮像装置12により、左眼用の画像と右眼用の画像を取得する作業である。撮像装置はビデオカメラであってもよい。取得した左眼用画像と右眼用画像は、立体表示のための処理を行ってディスプレー4上に表示する(S02)。ディスプレー4に表示された被測物は、立体視用眼鏡を使うなど立体視化手法に従って、画像中に立体として観察できる。
【0085】
次に、第1ポインター42の位置を確定する(S03)。
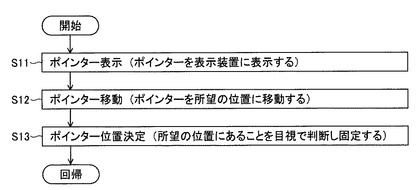
第1ポインター42の位置確定は、図12に示す手順に従って行われる。まず、ポインター像表示装置21が、第1ポインター42と第2ポインター43の位置をディスプレー4の画面41中に表示させる(S11)。立体ノギス像として、第1ポインター42と第2ポインター43の位置にアンビルとスピンドルとを適宜対応させた立体ノギスの形状模写像を表示してもよい。なお、立体ノギス像は、コンピュータグラフィックスの技法を使って大きさや姿勢を実態に合わせて立体的に表示することが好ましい。
【0086】
オペレータは、ディスプレー4に表示された第1ポインター42の像を立体視で位置確認しながら、操作盤24のシーソースイッチ31と十字キー32を操作して、測定対象の一方の端点に当たる三次元位置に移動させる(S12)。
スイッチ類から出力される指令信号はポインター像表示装置21に伝送されて、指令通りにポインターの位置を変化させる。ポインターの位置情報は立体映像信号生成装置3に伝送され、立体視用画像に組み込まれて、ディスプレー4に表示される。
【0087】
第1ポインター42の位置が目的にかなう三次元位置になっているか否かは、目視により被測物との位置関係を判定して決定する。ポインターの奥行き位置は、オペレータが画面中の映像と比較して視覚で判定することができる。
立体ノギス像が表示されているときは、第1ポインター42の移動につれて対応するアンビルの部分も移動する。なお、ディスプレー4に表示されるアンビルの部分は、第1ポインター42のY座標値に応じて大きさが変化する。
【0088】
第1ポインター42が所望に位置にあることが判定できたら、押しボタンスイッチを押して位置を確定し、それ以後の第1ポインター42に関する移動用キーの操作を無効にする(S13)。
これにより、図11に示す、第1ポインター42の位置確定ができる(S03)。位置確定した第1ポインター42の位置に、ピンの像を立てて目印にしても良い。また、立体ノギス像が表示されているときは、第1ポインター42の位置が確定したときに、立体ノギス像のアンビルの位置が確定する。
【0089】
さらに、第2ポインター43を選択して、第1ポインター42と同様に図12に示す手順に従って、第2ポインター43の像を、測定対象の他方の端点に当たる三次元位置に移動させて、位置を確認した後、押しボタンスイッチを押して位置確定をする(S04−S06)。
立体ノギス像が表示されているときは、第2ポインター42の移動につれてスピンドルの部分も移動する。なお、ディスプレー4に表示されるスピンドル部分の大きさは、第2ポインター43のY座標値に応じて変化する。
【0090】
第2ポインター43の移動中も、第2ポインター43の座標は座標演算装置22により逐一算定されており、距離演算装置23がこれら座標値を使って第1ポインター42と第2ポインター43の間の距離を逐一算定している。算定した結果は、立体映像信号生成装置3で編成されて、ディスプレー4の表示面41の距離数値表示45にリアルタイムで表示されている(S05)。
【0091】
そこで、第2ポインター43の位置が確定されたら(S06)、そのときに距離数値表示45に表示されている距離値を読み取れば、その値が第1ポインター42と第2ポインター43で指定された測定対象における距離になる(S07)。
ここで表示される距離は、座標値から実寸に換算された実体距離とすることができる。
【0092】
なお、本実施形態では、立体ノギス像を使用して対象物の測定位置を確定するが、立体ノギス像の表示をせずに、ポインター自体を使って測定位置の確定をすることもできる。立体ノギス像を省くことにより、対象物周りの状態をより明瞭にディスプレー4に表示することができる。なお、ポインターは、ポイント位置のY軸方向距離に対応する大きさで表示することが好ましい。
また、立体ノギス像形成装置の適用先として、交差法配置された立体撮像装置を挙げているが、平行法配置の立体撮像装置においても、立体ノギス像の三次元位置を適宜に調整することにより、本発明の立体ノギス像形成装置を適用することができる。
【産業上の利用可能性】
【0093】
本発明の立体ノギス像形成装置を用いることにより、立体映像装置に表示される物体のサイズや物体間距離を立体的に測定することができるようになるので、特に立体内視鏡装置を用いた診断や手術などにおいて有効である。
【符号の説明】
【0094】
1 立体撮像装置
2 画像信号生成装置
3 映像信号生成装置
4 ディスプレー
5 立体ノギス像生成装置
11 第1の撮像装置
12 第2の撮像装置
13 コンバージェンス点
14,15 主点
16 内視鏡先端筒
18 コンバージェンス面
19 基準線
21 ポインター像表示装置
22 座標演算装置
23 距離演算装置
24 操作盤
25 記憶装置
31 Y軸用シーソースイッチ
32 十字キー
33 押しボタンスイッチ
34 押しボタンスイッチ
35 押しボタンスイッチ
36 ラチェット付きバーニア
37 トラッキングボール
38 アンビル
39 スピンドル
41 表示画面
42 ポインター像
43 ポインター像
44 結合線
45 距離数値表示
46 対象物像
47 立体ノギス像
48 フレーム
49 ラチェット付きバーニア
51,52 光軸
53 コンバージェンス点
54 コンバージェンス面
55 立体表示領域水平境界
56 立体表示領域垂直境界
57 観測点
61 左目用の画像
62 右目用の画像
63,64,65,66 表示された点
【技術分野】
【0001】
本発明は、立体撮像装置で取得する画像を立体的に表示する立体映像表示装置において、画像に表示された物体の幅や物体間の距離を推定するために使用する立体ノギス像及び幅や距離の数値表示を生成する装置に関する。
【背景技術】
【0002】
近年、立体映像表示装置は著しく発達してきている。立体映像表示装置では、たとえば、視差を持つように左右一対の撮像手段を配置し、撮像された左右一対の画像をモニターに表示し、それぞれの画像を左右の目で別々に捉えて脳で合成することにより、立体視化する。
【0003】
立体視には、左右画像を時分割で交互に表示し、液晶シャッターを備えたメガネで左右画像を交互に観察する時間分割立体表示方式や、左右画像をそれぞれ偏光軸が直交する偏光フィルタを通した上で、同一面に重ねて偏光表示し、左右で偏光軸が直交する偏光フィルタメガネを用いて左右画像に分離する偏光フィルタ眼鏡方式、液晶表示画面の水平1ドットライン毎に偏光方向が90度変化する液晶フィルタなどを設置し左眼用と右眼用の画像を交互に並べ、右回転円偏光板と左回転円偏光板を左右に配置した円偏光メガネで見ることにより分離された左右用の映像をそれぞれ左右の目で同時に見て立体視する円偏光方式など、各種の原理に基づく装置が利用されている。なお、裸眼で立体映像を観察することができる方法もある。
【0004】
映像の立体視化により、被写体に対する識別力が格段に向上する。また、特に医療の現場において立体内視鏡カメラが使用できれば、内蔵疾患の診断や手術を支援する上で大きな効果が期待される。さらに、立体映像中の物体の寸法や物体間の距離を簡単に知ることができれば、的確な診断や手術に大きく貢献することになる。
【0005】
しかし、立体内視鏡カメラから得られる映像は、形状と配置、色が主な情報で、映像として映し出される物体の大きさに関する情報は、直接に得ることはできない。立体カメラと人の目の位置関係は必ずしも対応していないので、特に立体視している対象の寸法や距離を正確に測ることは難しい。したがって、通常は、表示映像内に映し込まれた鉗子など比較対象物に基づいて寸法等を推定することが多い。このように、映像中の対象物についての大きさや距離に関する情報は確実性がない。
【0006】
立体カメラによる撮影方法には、カメラの光軸方向に注目した平行法と交差法の区別がある。しかし、立体視した映像中のある点の位置を求める場合は、いずれも左右両眼に対応するカメラの視線の交わり状況に基づく方法に従うので、本質的な相違はない。ただし、立体視を可能にするためには対象が左右のカメラ視野の両方に含まれている必要があるので、交差法の方が、よりカメラに近い対象まで立体視できる点、また視線の交角がより大きくなるため、視認したときの画像の立体感が大きい点などの利点がある。
特に、立体内視鏡装置では、左右のカメラの間隔が狭いので交差法がよく用いられている。
【0007】
立体内視鏡装置を用いた診断あるいは手術においては、術者が、立体内視鏡カメラにより撮影して表示された立体映像に映し出された患部を立体的に観察して、たとえば、患部の形状や周囲の状況、色などを診断の重要な判断材料とすることが期待される。しかし、患部の寸法や他の贓物との距離などを正確に推定する適当な手段がなく、奥行きを感じさせる立体映像は得られるものの、その寸法や距離は、過去の経験に基づいて類推するしか方法がなかった。また、患部の大きさも、鉗子など一緒に映像に写し込まれた比較対象物により推定するしかないが、位置関係が明確でなく正確に推定することは難しかった。
【0008】
このため、立体内視鏡カメラで撮影した映像を対象として距離画像を生成する手法が求められる。しかし、立体映像表示装置において、立体表示された映像から実物の距離や寸法を感得する簡便な手法は、未だ知られていない。
なお、このような事情は、立体内視鏡装置に限らず、一般に用いられる立体カメラを使用した立体映像表示装置においても同様で、映像中の事物の寸法や相互の距離を正確に求めることが難しい。
【0009】
特許文献1には、計測用目盛発生回路により最適なサイズの計測用目盛をモニター上に描画するようにした立体撮像装置が記載されている。特許文献1に開示された計測用目盛発生回路は、カメラの光軸が交わらない平行法に従って配置された立体カメラを対象として、別途測定される被検物までの距離にしたがって映像の倍率を求め、倍率に対応する目盛を発生させる。
【0010】
特許文献1に記載された立体撮像装置では、観察したい被検物を画像中心部に持ってくると、新しく提供された立体計測装置によりカメラに写った被検物のCCD素子上の位置に基づいて被検物までの距離が自動的に測定され、測定された距離に従い被写体の撮影倍率に対応した計測用目盛が形成される。形成された計測用目盛は自動的にモニター画面に表示されるようになっている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2007−187590号公報(段落0027、0030等)
【発明の概要】
【発明が解決しようとする課題】
【0012】
特許文献1記載の目盛表示は、画像中心部に持ってきた被検物が距離測定された結果に基づいて目盛合わせされるもので、奥行き方向には目盛が与えられない。したがって、別の被検物について寸法を知ろうとすると、その度にカメラの視野を移動して被検物が画像中心部に来るようにして測定する必要がある。
【0013】
しかも、カメラから被検物までの距離は得られても、カメラ視野の移動量を補償しなければ被検物の寸法を知ることはできない。また、任意の2点間距離、特に奥行き方向成分を含む距離を知るために利用することができなかった。
なお、特許文献1記載の目盛表示は、輻輳角とコンバージェンス点までの距離を取り込んだ演算を行うことにより、交差法を用いた立体カメラにも適用することができるが、平行法の立体カメラと同様に、被検体の寸法や2点間距離を知ることはできない。
【0014】
これに対して、本願出願人は、すでに特願2009−160664により、立体映像中に奥行き方向の寸法も表わせる立体スケールを表示する立体スケール像形成装置を提示している。本願出願人が開示した立体スケール像形成装置は、実寸目盛の付いた立体スケール像を映像中の任意の3次元位置に適宜の向きに置くことができる。
【0015】
しかし、本願出願人が先に開示した立体スケール像形成装置によっても、被検物の寸法や2点間の距離を知るためには、操作者が目盛を読み取る必要があり、正確な寸法や距離を得るには多少の熟練を要する。
【0016】
そこで、本発明が解決しようとする課題は、立体カメラで撮影した立体映像の適宜の位置に存在する対象物について、その寸法や他の事物との距離を測定するため、距離を知りたい測定位置にポインターを立てると、ポインター間の距離を求めて、立体映像表示装置に表示させる立体ノギス像形成装置を提供することである。
【課題を解決するための手段】
【0017】
本発明に係る立体ノギス像形成装置は、左目と右目に対応して第1の撮像装置と第2の撮像装置とを備えた立体撮像装置(立体カメラ)と、立体撮像装置からの撮像信号について信号処理して左目と右目に対応する画像信号をそれぞれ生成する画像信号生成装置と、左目と右目に対応する画像信号を合成して立体映像表示するための立体映像信号を生成する立体映像信号生成装置と、立体映像信号に基づいて、立体視できる映像を立体表示するディスプレーとを備えた立体映像表示装置に適用する装置である。
【0018】
上記課題を解決するため、本発明に係る立体ノギス像形成装置は、ディスプレーに表される立体画像中に表示されるポインターの位置を指定する操作端を備える操作盤と、ポインターの位置情報を生成して供給するポインター像表示装置と、ポインターの位置情報を入力して立体撮像装置に固定される座標系においてポインターの3次元位置を表す座標値を算定する座標演算装置と、立体画像中の2つのポインターについて算定された座標値に基づいて上記2つのポインター間の実体距離値を算定して供給する距離演算装置と、を備え、立体映像信号生成装置が、ポインターの位置情報を入力して第1の撮像装置による画像と第2の撮像装置による画像のそれぞれにポインターの像を加えた画像信号を生成してディスプレーに伝達し、また、2つのポインターの間の実体距離値を入力して数値表示する画像信号を生成してディスプレーに伝達し、ディスプレーがポインターの像と2つのポインター間の実体距離値を表示することを特徴とする。
本発明の立体ノギス像形成装置は、さらに、立体ノギス像表示装置を備えて、2つのポインターの位置を測定長の端点とする立体ノギス像を形成してディスプレーに立体表示させるようにしてもよい。
【0019】
また、上記課題を解決するため、本発明に係る立体ノギス像形成プログラムは、立体ノギス像形成装置におけるコンピュータを、ディスプレーに立体表示する第1のポインター像と第2のポインター像の位置情報を生成して立体映像信号生成装置に伝送するポインター像表示手段と、ポインター像の位置を立体画像中で移動させる操作端から入力された信号に基づいて、ポインターの位置を立体画像中で移動させる手段と、立体画像中のポインターの3次元位置を立体撮像装置に固定された座標系の座標で表す座標演算手段と、立体画像中の2つのポインターについて指定された座標に基づいて2つのポインターの間の実体距離を算出して、ディスプレーに表示させるため、算出した実体距離の情報を立体映像信号生成装置に伝送する距離演算手段として機能させることを特徴とする。
さらに、本発明のプログラムは、立体ノギス像形成装置におけるコンピュータを、第1と第2のポインターの位置にアンビルとスピンドルの先端を合わせた立体ノギス像を形成してディスプレーに立体表示させる立体ノギス像表示手段として機能させるようにしてもよい。
【0020】
オペレータは、ディスプレーの立体映像を観察して、本発明に係る立体ノギス像形成装置により立体映像中に表示される立体ノギス像のアンビルとスピンドルの位置すなわち測定距離の端点の位置を、操作盤を用いて3次元的に移動させて、立体映像中の対象物について寸法を知ろうとする部分や立体映像中で距離を測りたい位置を示す任意の2点を指定することができる。2点間距離はディスプレーに逐次表示されるため、対象物の寸法や距離は直ちに知ることができる。
なお、立体ノギス像が立体表示されるため、立体ノギス像の各部が立体映像中の奥行き距離に対応する大きさを有するので、立体ノギス像を観察することにより立体ノギスが当てられた対象物の位置を直感的に把握することができる。
【0021】
交差法を用いた立体撮像装置に固定される座標系は、2つの撮像装置の光軸が交差する輻輳角を2等分する2等分線を1つの座標軸(Y軸)とする直交座標系であることが好ましい。特に、2つの撮像装置の光軸が含まれる面に、すなわち2つの撮像装置が並ぶ方向に、第2の座標軸(X軸)を持つようにすることができる。さらに、2つの撮像装置の光学系の主点を結ぶ線分の中点に原点を配置した座標系を用いると、座標計算や距離計算を簡素化することができる。なお、原点を、2つの撮像装置の光軸が交差する点であるコンバージェンス点に配置してもよい。
【0022】
オペレータが設定するポインターの座標は、左目に見せる画像と右目に見せる画像としておのおのディスプレーに表示する基準映像画面の中のポインターの表示位置に基づいて、演算で簡単に求めることができる。また、ポインターの3次元位置から、基準映像画面の中のポインターの表示位置を求めることも容易である。
基準映像画面は、たとえば、第1の撮像装置と第2の撮像装置の光軸が交差するコンバージェンス点にY軸に垂直に設けられたコンバージェンス面に設定される。左目に見せる画像と右目に見せる画像におけるコンバージェンス点の映像は、ディスプレーにおいて同じ点に重なることになる。
ポインターの位置を立体映像撮影に使う立体撮像装置に固定される3次元座標で求めると、2つのポインター間の距離は演算で簡単に求めることができる。
【0023】
オペレータは、操作盤を操作することにより、立体ノギス像の測定先端(アンビル)の位置を簡単に調整することができる。オペレータが、対象とする被測物と立体ノギス像が表示された映像を観察しながらそれぞれのポインターの位置を目的物に合わせると、アンビルを2つのポインターに合わせた立体ノギス像が表示されると共に、2個のポインター間の実体距離が自動的に表示される。ポインターと目的物の位置が3次元的に合致したか否かは、ディスプレーに表示された画像を立体視するオペレータの視覚によって判定することができる。
【0024】
なお、演算装置が実体距離を算出して表示するときには、たとえば原点とコンバージェンス点の距離を基準値として与えることにより、立体撮像装置に固定される座標系の座標値と実寸の間で正確に換算を行うことができる。
また、立体撮像装置の光学系が異なれば座標系も異なるので、立体撮像装置ごとに固有の座標系を作成するときに、実寸に関連付けられた基準立体スケールを、コンバージェンス点など、基準の位置に配置して立体撮像装置で撮影して得られた映像に基づいて、目盛を実際の寸法と対比して校正するようにしてもよい。
【0025】
なお、本装置によればポインター間の距離は簡単に算出できるので、ポインターの位置を移動させる間も立体ノギス像を追従させると共に、リアルタイムにディスプレーに距離を表示することができる。
また、立体ノギス像の形状は、立体撮像装置からの距離あるいはY座標値にしたがった大きさで表示すると、対象の遠近感が的確に把握できて正確な観察が可能になる。
【0026】
立体カメラが映し出す映像にオーバーライドされる立体ノギス像の位置を制御するための操作盤は、オペレータが映像を観察しながら操作できるばかりでなく、たとえば、術者の指示で補助者が間違いなく操作したり、収録された立体映像を後日分析する場合に正確に操作したりできることが要求されるので、再現性がよく、簡単に操作できるものであることが好ましい。
【0027】
操作盤には、ポインターについて直交座標系の3軸方向の運動をそれぞれ指定する操作端と、1操作で直ちに基準位置に戻すことができる操作端を備える。ポインターまたは立体ノギス像の基準位置は、2つの撮影装置の光軸の交差点すなわちコンバージェンス点であることが好ましい。
【0028】
操作盤には、さらに、立体ノギスの測定軸方向を固定したままポインター間距離を伸縮させるダイアルを備えると便利である。また、ポインターの選択に使うスイッチや位置確定の指示を行うためのスイッチなどを搭載することもできる。なお、マウスやジョイスティックなど、常用されるポインティングデバイスをこれら操作端やスイッチ類の代わりに利用することもできる。
また、操作盤にトラッキングボールなどの操作端を設けて、立体ノギス像が映像を観察するために障害となる場合には、立体ノギス像の姿勢を簡単に変化させることができるようにすると、より便利である。
【0029】
立体撮像装置を取り換えるときは、立体映像表示装置に新しく組み合わせる立体撮像装置について予め較正した測定パラメータを選択して適用することができる。較正した測定パラメータはデータベースとして記憶装置に格納しておいて、切り換え時に新しい立体撮像装置に適合する設定値のセットを読み出して適用するようにしても良い。こうすることにより使用前の調整時間を節約することができるので、たとえば、立体内視鏡を用いた手術を行う場合など、術者の執刀前の準備時間を短縮して、他の作業に注力する余裕が与えられるので好ましい。
【0030】
なお、ポインター像表示装置と座標演算装置と距離演算装置とは、論理を実行する電子回路により構成することができるが、プログラムで制御することによりそれぞれの機能を遂行するようにした汎用または専用のコンピュータによって構成することもできる。
本発明に係る立体ノギス像形成装置は、上記構成を有する既存の立体映像表示装置に対しても、立体ノギス像形成装置を追加することにより、適用することができる。なお、立体ノギス像形成装置がコンピュータを機能させるためのプログラムで構成される場合は、既存の立体映像表示装置の制御装置にこのプログラム及び操作盤を追加することにより、本発明を適用することができる。
また、本発明の立体ノギス像形成装置は、立体映像(動画)に対して適用できるが、立体静止画像についても利用できることは言うまでもない。
【発明の効果】
【0031】
本発明に係る立体映像表示装置の立体ノギス像形成装置は、オペレータが画像中の対象物体の映像に対して立体ノギス像のポインター位置を指定することにより、対象物の寸法や適宜の2点間距離など、ポインター間の正確な距離を簡単に得ることができる。
特に、立体内視鏡装置を用いて患部の観察や手術を行うときには、本発明に係る立体ノギス像形成装置を用いることにより、術者が画像中に表示された患部などの寸法や対象物間の距離を簡単に知ることができるので補助装置として有用である。
【図面の簡単な説明】
【0032】
【図1】本発明の1つの実施形態に係る立体映像表示装置の立体ノギス像形成装置の構成図である。
【図2】本実施形態におけるディスプレーの表示例を示す概念図である。
【図3】本実施形態におけるディスプレーの立体ノギス像の表示例を示す概念図である。
【図4】本実施形態に係る操作盤の斜視図である。
【図5】本実施形態に係るポインターをY軸方向に移動したときの立体ノギス像の変化例を示す斜視図である。
【図6】本実施形態における立体撮影装置の第1の撮像装置と第2の撮像装置に対する基準図形の位置と表示大きさとの関係を説明する斜視図である。
【図7】本実施形態に係る立体ノギスのポインター位置と左右の撮像装置の視線の関係を説明する平面概念図である。
【図8】本実施形態に係る立体ノギスのポインター位置と左右の撮像装置の視線の関係を説明する側面概念図である。
【図9】本実施形態に係る任意の点の座標と立体視化する画像上の対応点の関係を説明する概念図である。
【図10】本実施形態に係る立体ノギスのポインターを立体表示するときの左右の画像面を説明する概念図である。
【図11】本実施形態に係る立体ノギス像の使用手順を説明するフロー図である。
【図12】本実施形態の立体ノギスのポインター位置設定手順を説明するフロー図である。
【発明を実施するための形態】
【0033】
以下、本発明に係る立体映像表示装置の立体ノギス像形成装置について、図面を参照しながら詳しく説明する。なお、図面においては、同じ機能を有する構成部材については同じ参照番号を付して説明を簡約にし、説明の重複を避けた。
【0034】
図1は、本発明の1つの実施形態に係る立体ノギス像形成装置を用いた立体映像表示装置の構成図である。本実施形態の立体ノギス像形成装置を適用した立体映像表示装置は、立体撮像装置1と画像信号生成装置2と立体映像信号生成装置3とディスプレー4と立体ノギス像形成装置5とを含んで構成される。
【0035】
立体撮像装置1に含まれる第1の撮像装置11と第2の撮像装置12は、ほぼ同じ性能を有するカメラで、固定の主点間距離をおいて結合され、左右一対の撮像装置は、視差を持つように配置され、左右一対の画像を撮像して撮像信号を出力する。本実施形態におけるように交差法を利用する場合は、一対の撮像装置の光軸が輻輳角をもって交わるため前方の決められたコンバージェンス点13で交差するように配置される。
立体撮像装置1は、立体内視鏡のプローブ先端に設けられた1対のカメラであっても良い。
【0036】
第1の撮像装置11と第2の撮像装置12が生成した撮像信号は、画像信号生成装置2に入力される。画像信号生成装置2は、撮像装置11,12から入力された撮像信号を信号処理して、それぞれのカメラごとに画像信号を生成する。図において、第1の撮像装置11からは左目で見るための画像が生成され、第2の撮像装置12からは右目で見るための画像が生成される。
画像信号生成装置2から出力される左目用と右目用の1対の画像信号は、立体映像信号生成装置3により合成されて、ディスプレー4に立体映像として表示するための立体映像信号となり、ディスプレー4に送信される。
【0037】
ディスプレー4では、左目用の画像は左目で見えるように、また右目用の画像は右目で見えるように表示する。左目用画像と右目用画像に分離した一対の画像を、コンバージェンス点13における映像が重なるように配置することにより、2つの画像から実物像を立体視することができるようになる。
【0038】
立体視化の方法は、たとえば、右目用画像と左目用画像を交互に切り換え表示し、これと同期してオンオフする液晶シャッタメガネなど専用の立体メガネで観察する時間分割立体表示方式や、偏光軸が直交する偏光フィルタを通して左右の画像をプロジェクタに投射して同一画面に重ねて表示し、偏光フィルタ眼鏡で左目用画像と右目用画像に分離する偏光フィルタ眼鏡方式や、液晶表示面の水平走査ライン毎に偏光方向が90度変化する液晶フィルタを設置し、液晶表示面に左眼用と右眼用の画像を水平走査ライン毎に交互に並べて、右回転円偏光板と左回転円偏光板を左右に配置した円偏光メガネで見ることにより分離された左右用の映像をそれぞれ左右の目で同時に見て立体視する円偏光方式など、色々な方法が知られている。
【0039】
立体ノギス像形成装置5は、ポインター像表示装置21、座標演算装置22、距離演算装置23、操作盤24、記憶装置25、立体ノギス像表示装置26を含んで構成される。
オペレータが操作盤24を用いて指定するポインターの位置情報は、ポインター表示装置21で生成され、ポインター表示装置21から立体映像信号生成装置3に送信される。立体映像信号生成装置3は、立体撮像装置1で生成された撮像信号から画像信号生成装置2で左右の目用にそれぞれ生成された画像信号と、受信したポインターの位置情報を合成して、立体撮像装置1で取得した対象物の立体画像とポインターの立体画像が重なった立体映像信号としてディスプレー4に表示させる。
【0040】
図2は、ディスプレー4の表示面41における表示例を示す概念図である。表示面41には、左右両眼の視差に基づいて奥行きを判断する視差法に基づいた立体像46が表示されている。
ディスプレー4の表示面41には、第1の撮像装置11から供給される左目用の画像と第2の撮像装置12から供給される右目用の画像が両方表示されている。このような表示から立体像46を得るには、左目用の画像と右目用の画像を分離して、左目と右目で別々に見ることが必要になる。
【0041】
立体視には、先に述べた通り、時間分割立体表示方式や偏光フィルタ眼鏡方式など、いくつかの方法があるが、本実施形態では、2枚の画像を並べてそれぞれ別の目で見て立体視化する視差法であれば具体的な方法を問わない。
【0042】
図2に示された表示面41には、さらに2つのポインター42,43とポインター間を繋ぐ結合線44で代表する立体ノギス、およびポインター42,43の実体距離を表示する距離表示枠45が立体表示されている。図2では、2つのポインター42,43は物体像46の輪郭でなく、その内部における知りたい寸法の端点を3次元的に指示している。
また、ポインター42,43は、ポインターのある位置が近いほど大きく、遠いほど小さく表示して、距離感の直感的な把握を容易にするようにしてもよい。
【0043】
なお、画像のリアリティを向上させるために、2つのポインター42,43とポインター間を繋ぐ直線44でノギスを代表する代わりに、ノギス像を立体表示することができる。図3は、マイクロメータに似せてフレーム48やバーニア49を備えたノギス形状をデザイン化した立体表示用のノギス像47の例を示す。ノギス像47はコンピュータグラフィックス(CG)を使って、ディスプレー4の画面中に立体的に表現される。
【0044】
ポインター42,43には、ノギス像47のアンビル38とスピンドル39(ノギスのジョーに当たる)が当接され、2つのポインター42,43を結ぶ結合線44の上にノギス像47の測定軸Yn軸が設定されている。距離や間隔の測定はYn軸に沿って行う。また、操作盤24にトラッキングボール37などポインタデバイスを備えて、ポインタデバイス37を操作することにより、Yn軸を回転軸としてフレーム48の傾きを加減して、背景の立体映像の邪魔にならないようにすることができる。なお、立体表示するノギス像47は、背景映像の邪魔にならないように半透明に表示してもよい。
【0045】
操作盤24を使ってポインター42,43をそれぞれ対象の測定位置に当接させると、座標演算装置22によりそれぞれの座標が算定され、立体ノギス像表示装置26によりポインター位置に対応する立体ノギス像のグラフィックスが形成され、距離演算装置23によりポインター間の距離が算定される。形成された立体ノギス像の表示情報と求められた距離は立体映像信号生成装置3に送信され立体映像信号に組み入れられて、立体ノギス像は表示画面41中に立体表示され、距離値は表示画面41中の距離表示枠45に表示される。
なお、距離表示枠45は立体表示する必要がないので、平面的に表示するようにしてもよい。
【0046】
図4は、本実施形態の立体ノギス像形成装置に用いられる操作盤の例を示す斜視図である。操作盤24は、ノギスの当て方、すなわちポインターの立体位置、を指定する装置である。
図4に示すように、操作盤24には、シーソーキー31と、十字キー32と、いくつかの押しボタンスイッチ33,34,35と、ラチェットストップ付きバーニア36とが配置されている。操作の自由度を上げるため、トラッキングボール37や図示しないジョイスティックなどをさらに設けてもよい。
【0047】
シーソーキー31は、ポインターの奥行き方向(Y軸方向)の移動を指示するスイッチである。シーソーキー31は、操作盤24の側面に設けられ前後方向にスイングするスイッチで、シーソーキー31の向側の端部を押し込めば指定されたポインターが遠方に(Y軸正方向に)表示されるようになり、手前側の端部を押し込めばポインターが手前に近づく方向(Y軸負方向)に移動する。実際には、たとえば、立体撮像装置に固定された座標系におけるポインターのY座標値を増減することでY軸方向に移動させることができる。
シーソーキー31は押し込み深さや押し込み継続時間によってポインターの運動方向と速度を指定するものであっても良い。
【0048】
十字キー32は、操作盤上面に設けられ2方向にスイングして、画像中のポインターの横方向(X軸方向)と縦方向(Z軸方向)の移動を指示するスイッチで、直交配置された2個のシーソーキーと等価なスイッチである。十字キー32の横方向の腕は、たとえばX座標値を増減することによってポインターの横方向の運動制御を行い、腕の右側を押し込めば、ポインターは横方向右側(X軸正方向)に移動し、左側を押し込めばポインターは横方向左側(X軸負方向)に移動する。また、縦方向の腕は、たとえばZ座標値を増減することによって画像中のポインターの縦方向の運動制御を行い、腕の上側を押し込めば、ポインターは上の方向(Z軸正方向)に移動し、下側を押し込めば、下の方向(Z軸負方向)に移動する。なお、十字キー32は、長押しにより上の通り決められた方向に高速移動するように構成しても良い。
【0049】
押しボタンスイッチ33,34,35は、ボタンを押すことにより、ポインターの位置決定や、ポインターの初期位置に戻す指令や、操作するポインターの選択などを行うスイッチである。なお、押しボタンスイッチは、必要に応じて、4個以上設けても良い。
ラチェットストップ付きバーニア36は、操作盤24の側面に設けられ、立体ノギス像のアンビル38とスピンドル39を結ぶ方向を変えずに、距離を増減するために使用する。マイクロメータにおけるバーニアと同じ機能を担わせたものである。
【0050】
オペレータは、操作盤24のシーソーキー31と十字キー32により、ポインターの位置を映像中の任意の位置に移動させることができる。ポインターの位置は、立体撮像装置に固定された直交座標系のXYZ座標で表わすことができる。ここで便宜のため、座標系の原点を2つの撮像装置における光学系の主点同士を結ぶ線分の中点に置き、X軸を主点同士を結ぶ線分の上に、Y軸を原点とコンバージェンス点13を結ぶ線の上に、Z軸をX軸とY軸に垂直な方向に取ったXYZ直交座標系を用いるものとする。
【0051】
2つのポインター42,43の3次元位置が決まれば、これらポインターにアンビル38とスピンドル39を当接させた立体ノギス像47は容易に形成され、ポインター間を結ぶ直線は簡単に描くことができ、ポインター間の距離も与えられる。ポインター42,43の3次元位置を決めるには、各ポインターについて3自由度を調整するシーソーキー31と十字キー32があれば足りる。
【0052】
なお、ポインターの移動を行う操作端として、トラックボール37やジョイスティックで、シーソーキー31と十字キー32の組み合わせに代替することもできる。これらは、操作性に差があり、操作する者の嗜好もあるので、選択できるようにしておいてもよい。
また、トラッキングボール37は、立体表示したノギス像47のフレーム48の影が映像の観察に邪魔になるときに、立体表示したノギス像47の回転軸(Yn軸)を中心としてフレーム48を回転させるために使用するようにすることができる。
【0053】
立体ノギス像の形態は、2次元の画面中のポインターの位置だけでは決まらず、3次元位置にしたがって定まることは、いうまでもない。また、立体ノギス像の形状は、立体撮像装置からの距離あるいはY座標値にしたがった大きさで表示することができる。
たとえば、図5は、ポインターが画面中の距離を変えずにY軸方向に移動したときに、立体ノギス像が変化する様子を説明する図である。また、図6は、立体撮影装置の第1の撮像装置と第2の撮像装置に対する基準図形の位置と表示大きさとの関係を説明する斜視図である。
【0054】
図6は、基準立体図形を、第1の撮像装置11の光軸と第2の撮像装置12の光軸が交わって形成するコンバージェンス点13と、2つの撮像装置の主点14,15の中間点Oとを結ぶY軸上に置いたときに、表示装置4に投影される立体図形の像21,22,23の大きさがY軸上の位置により変化する状態を示す。
図6に示すように、コンバージェンス点13の位置に、2つの撮像装置の光軸を含む面に垂直なコンバージェンス面18を想定する。ここで、第1の撮像装置11と第2の撮像装置12のたとえば主点14,15同士を結ぶ線を基準線19とし、基準線19からコンバージェンス面18までの距離をDcとする。
【0055】
コンバージェンス面18に立体図形が存在するとき、ディスプレー4に表示される立体図形像21は、光学系と電子回路と表示装置などにより規定される所定の倍率が掛かった所定の大きさを有するものになる。
立体図形像22は、基準立体図形がコンバージェンス面18より撮像装置に近い位置にあるものとして表示されたときの像である。ここで、基準線19から立体図形像22に対応する基準立体図形までの距離をDsとすると、立体図形像22の大きさは、コンバージェンス面18にあるものとして表示される立体図形像21のDc/Ds倍に拡大して表示される。
【0056】
また、立体図形像23は、基準立体図形がコンバージェンス面18より撮像装置から遠い位置に配置されたときの像である。ここで、基準線19から立体図形像23に対応する標準図形までの距離をDlとすると、立体図形像23の大きさは、コンバージェンス面18にあるものとして表示される立体図形像21のDc/Dl倍に縮小して表示されることになる。
【0057】
こうして、同じ大きさの対象物であっても、撮像装置2からの距離が変化すれば、シスプレー4に表示される像の大きさが距離に対応して規則的に変化して、映像観察者に映像中の像の遠近感覚を的確に喚起させることができる。
したがって、距離あるいは間隔を測定する立体ノギスの像に対して上記説明の通り距離に従って大きさを変化させるようにして、測定対象に当てた立体ノギスの像を観察することにより、直感的に測定対象の奥行き位置を推察できるようにすることができる。
【0058】
図5(a)は、本実施例における、ポインターAとポインターBがほぼ同じXZ面上に存在する場合の立体ノギス像を示す。図5(b)は、図5(a)におけるポインターAとポインターBが画面中のほぼ同じ位置に見えるにもかかわらず、ポインターBが奥行き方向のY軸に沿って遠ざかった状態にある場合の立体ノギス像を示している。
【0059】
図5(a)では、ポインターBに合わせられたアンビル部分はポインターAに合わせられたスピンドル部の大きさに近くなっている。これに対して、図5(b)では、ポインターBに対応するアンビルの像が距離に対応して小さくなり、フレームがアンビルに近い方で細くなり、かつ立体ノギス像が傾いていることから、画面中のポインターAの像とポインターBの像の距離が変化しなくても、ポインターBが遠ざかっていることが直感的にも明らかである。
【0060】
ポインターの奥行き位置が異なる場合でも、ポインターAとポインターBの座標値を用いることにより、両ポインター間の距離は正しく求めることができるが、本実施例では、立体ノギス像を立体撮像装置からの距離あるいはY座標値にしたがった大きさで表示することにより、対象の遠近感が的確に把握でき、直感的な観察が可能になる。
また、ポインターA,Bにラベルを付して、そのラベルの大きさを遠近に従って変更することも、対象の遠近を直感的に観察するために有効である。
【0061】
なお、立体ノギスやポインターのラベルの表示寸法は、Y座標値に対応して演算に基づいて決めることができるが、基準立体スケールを立体撮像装置で撮影してY座標と寸法の関係を実地で確認した結果を利用することもできる。
たとえば、所定の形状をした基準の立体スケールを光軸上の適宜の位置に配置して実写することにより、撮影した位置すなわちY座標位置における画像中の立体スケール像の大きさが確定する。したがって、適当な範囲において、複数の異なる位置で撮影した結果を使って、使用範囲内の実物と映像の大きさの換算係数を求めることができる。なお、中間位置については補間計算により妥当な係数を得ることができる。
こうして得られた換算係数は、光学系の非線形性などの影響や不測の外乱も含めた結果であるので、実態と整合させるために複雑な補正演算を行う必要がない。
【0062】
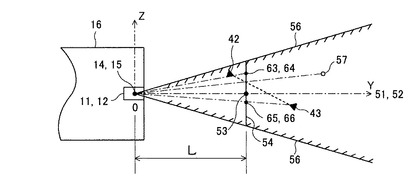
図7は、立体ノギスのアンビルとスピンドルの位置を定めるポインターの位置と、左右の撮像装置の視線の関係を説明する平面概念図、図8はその側面概念図である。表示された実施例では、左目用撮像装置11と右目用撮像装置12は立体内視鏡の先端筒16に収まっているものとする。
左目用撮像装置11の主点14と右目用撮像装置12の主点15を適宜の距離2dだけ離して左目用撮像装置11と右目用撮像装置12の位置が固定される。左右一対の立体画像は、両者の光軸がコンバージェンス点53で交差するようにした交差法により撮像される。
【0063】
立体映像化するためには、その部分の映像が2つの撮像装置11,12のいずれの撮像画面にも入っている必要がある。したがって、立体視化可能な領域は、2つの撮像装置の視野55が重なる図中斜線で影を付けた部分になる。図8の側面図では、上下方向の視野56により制限される図中斜線で影を付けた領域となる。
【0064】
なお、立体撮像装置1に固定され2つの撮像装置の主点14,15を結ぶ線分の中点に原点Oを配置した直交座標系の座標で表現すれば、左目用の第1撮像装置11の主点14は(−d,0,0)の位置、右目用の第2撮像装置12の主点15は(d,0,0)の位置にあることになる。
【0065】
立体視可能な領域内に設定した第1のポインター42および第2のポインター43は、それぞれ第1撮像装置11からポインター42,43を見た視線がコンバージェンス点53におけるXZ面(コンバージェンス面)54に投影された点63,65を左目用画像における指示ポイントとして、ディスプレー4に表示させるようにする。
【0066】
また、第2撮像装置12からポインター42,43を見た視線がコンバージェンス面54に投影された点64,66を右目用画像における指示ポイントとして、ディスプレー4に表示させるようにする。
こうしてディスプレー4に表示された指示ポイントを両眼で立体視すると、第1のポインター42と第2のポインター43が立体映像中のそれぞれの実体位置に存在するように見ることができる。
【0067】
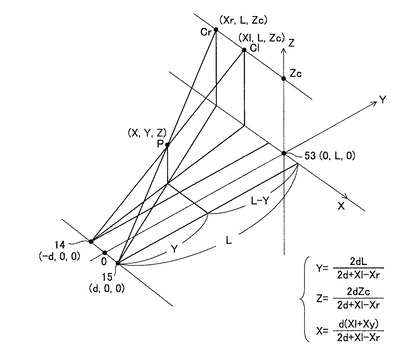
図9は、適宜の位置にあるポインターなどの点の座標と、左右の撮像装置から見通す視線がコンバージェンス面と交わる位置の座標の関係を説明する図面である。
図7,図8に表された第1のポインター42が、図9に示す位置P(X,Y,Z)にあるとして、第1撮像装置11から第1のポインター42を見た視線をコンバージェンス点53におけるXZ面(コンバージェンス面:Y=L)に投影した点Clの座標が(Xl,L,Zc)となり、第2撮像装置12から第1のポインター42を見た視線をコンバージェンス面に投影した点Crの座標が(Xr,L,Zc)となるとする。ここで、第1撮像装置11と第2撮像装置12の主点間距離は2dであり、主点間接続線とコンバージェンス点53との距離はLである。
【0068】
図9に示された、相似比Y:(L−Y)の相似三角形から、Y:(L−Y)=2d:(Xl−Xr)であるから、
Y/L=2d/(2d+Xl−Xr)
相似比Y:Lの多数の相似三角形から、
Z/Zc=Y/L
X/(Xl+Xr)=Y/L
なる関係が成立することから、Cl(Xl,L,Zc)とCr(Xr,L,Zc)の座標が分かれば、簡単にP(X,Y,Z)の座標が求められることが分かる。
【0069】
ちなみに、X,Y,Zは下の式で求められる。
X=d(Xl+Xr)/(2d+Xl−Xr)
Y=2dL/(2d+Xl−Xr)
Z=2dZc/(2d+Xl−Xr)
すなわち、ポインターを立体視化するための左目用画像と右目用画像には、ポインターを見通すカメラの視線がコンバージェンス面(Y=L)に投影されたときの座標がCl(Xl,L,Zc)およびCr(Xr,L,Zc)として与えられるので、実体に対応するポインターの位置P(X,Y,Z)の座標が論理的に求められる。
【0070】
また、逆に、P(X,Y,Z)の座標が与えられれば、Cl(Xl,L,Zc)とCr(Xr,L,Zc)の座標が論理的に求まる。
ちなみに、Zc,Xl,Xrは下の式で求められる。
Zc=ZL/Y
Xl=(XL―d(L−Y))/Y
Xr=(XL―d(L+Y))/Y
したがって、ポインターの位置Pが与えられたときに、そのポインターを立体視させるための左目用画像と右目用画像を理想的に生成することができる。
なお、より現実的には、たとえば本願出願人が開示した特願2009−160664に記載された手法を用いて、基準パターンを実写した結果得られる座標空間で左右の画像を生成することもできる。
【0071】
立体ノギスを使用して対象物の径や距離を測定するときは、オペレータは、図4に例示した操作盤24を操作して、第1ポインター42と第2ポインター43の立体位置を定める必要がある。操作盤24の押しボタンスイッチを使って第1ポインター42を選択すると、ポインター像表示装置21の働きにより、第1ポインター42は初めに基準点となるコンバージェンス点53の位置、すなわち座標(0,L,0)の位置に移動する。コンバージェンス点53は左目用と右目用の画像面における共通中心点である。
【0072】
そこで、オペレータは、操作盤6のシーソーキー31と十字キー32を操作して、第1ポインター42をXYZの各方向に動かして目標の位置Pに移動させる。
シーソーキー31は、たとえば、Y値を増減する指令をポインター像表示装置21に送信して、ポインターの位置をY軸方向に動かさせる機能を有する。また、十字キー32は、ポインター像表示装置21におけるX値とZ値をそれぞれ増減させて、ポインターの位置をX軸とZ軸の方向に移動させる機能を有する。
【0073】
ポインター像表示装置21は常にポインターの座標値を使ってポインターの立体画像情報を生成して、立体映像信号生成装置3に送っているので、移動中に変化する座標(X,Y,Z)は逐一、撮像装置11,12のポインターを見通す視線がコンバージェンス面54上に投影される位置に反映されるので、いつでもポインターの立体視ができる。
【0074】
オペレータは、立体視したポインターの3次元位置と立体画像中の対象物の3次元位置とをディスプレー4の立体映像画面41中で目視により比較して、ポインターが目標位置に到達したと判断できるところまで移動させると押しボタンスイッチを操作して、第1ポインター42の位置を確定する。第1ポインター42の位置が確定したときには、同時に虫ピンのようなピン画像を確定位置に立てて、目印にするようにしてもよい。
【0075】
また、目印のピン画像は、先に画像中の対象物の位置に立てておいて、ピンをめがけてポインターを誘導するような利用方法もある。
なお、上記手順では、第1ポインター42の位置を合わせるために、静置したカメラの画面中でポインターを動かしたが、カメラの画像中にポインター位置を固定して、カメラの撮影方向や対象までの距離を変化させて、第1ポインター42の位置合わせを行うこともできる。
第1ポインター42には、図3に示したようなマイクロメータ型の立体ノギス像47のアンビル38が当接して、第1ポインター42の移動に追従して立体ノギス像を移動あるいは変形させている。
【0076】
次に、第2ポインター43を選択すると、第2ポインター43も初めに基準点であるコンバージェンス点53(0,L,0)の位置に移動する。そこで、第1ポインター42と同様にシーソーキー31と十字キー32を操作して、第2ポインター43の目標位置まで移動させてから、押しボタンスイッチを操作して位置決定する。
第2ポインター43には、マイクロメータ型立体ノギス像47のスピンドル39が当接して、第2ポインター42が移動すると、これに追従して立体ノギス像を移動あるいは変形させている。
【0077】
ポインター間の位置関係を分かりやすくするため、第1ポインター42と第2ポインター43の間は、画面上、常に結合線44で結合させておいてもよい。結合線44は、背景となる映像が見えるように薄い透明色の線で表示されることが好ましい。
また、ポインター42,43の座標値は常時把握されているので、移動中においても距離演算装置23によって2つのポインターの間の距離を算定することができる。したがって、演算結果が立体映像信号生成装置3に送信され、ディスプレー4の表示面41における距離数値表示45に移動中における両者間の距離値が表示されるようにすることができる。
【0078】
また、シーソーキー31や十字キー32は直交座標系の各軸に沿って移動させるが、ポインター42,43が挟む測定対象物が膨張縮小した場合など、測定方向が変化しないときには、座標軸ごとの動きでなく、ポインター間の距離のみを直接変更するため、操作盤24におけるラチェット付きバーニア36を操作することができる。バーニア36は、使い慣れているマイクロメータの操作部と同じ物であるので、オペレータにとって扱い馴れているという利点がある。
【0079】
さらに、操作盤24には、リセット用の押しボタンスイッチが設けられていて、ポインターの位置が大きくずれたときや、撮影対象を変えたときなどに操作すると、ポインターの位置を一挙にコンバージェンス点53などの基準位置に移動させることができる。この機能があることにより、対象が画面中の離れた場所に移ったときにも、迅速なポインターの位置指定が可能になる。
【0080】
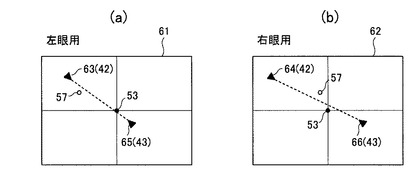
図10は、1対のポインター42,43に対応する立体ノギスの立体表示を可能にするための、左目用画像と右目用画像の概念を説明する図面である。図10(a)は立体ノギスの左目用画像、図10(b)は同じ立体ノギスの右目用画像である。なお、簡単のため、図では、立体ノギス像のアンビルとスピンドルを黒塗りの三角形で代表し、立体ノギス像の表示を省略している。
図10(a)に示した立体ノギスの左目用画像61は、第1撮像装置11で撮影した左目用映像と一体となって、ディスプレー4に表示されたときに人の左目で観察される部分となる。また、図10(b)の立体ノギスの右目用画像62は、第2撮像装置12で撮影した右目用映像と一体となって、ディスプレー4に表示されたときに人の右目で観察される部分となる。
【0081】
図7,図8などを参照して分かるように、図10に表示された点63,64:65,66は、実際の3次元位置の点42:43を撮像装置11,12から見た視線がコンバージェンス面54(y=L)に当たる位置として表示される。図10(a)と図10(b)の画像61,62は、第1ポインター42および第2ポインター43のコンバージェンス面54における投影図ということもできる。図10(a)と図10(b)の画像61,62は、ディスプレー4に表示されて、左右の目でそれぞれ見た画面が脳で合成されることにより、立体ノギスを立体的に観察されるようにするものである。
【0082】
なお、図10(a)の左目用画像61と図10(b)の右目用画像62を比較すると、1つの点について表示する各点の高さ(Z値)は左目用画像61と右目用画像62で同じ値になる。そして、X値が左目用画像61における値より右目用画像62における値が大きいときは、その点が表すポインター位置がコンバージェンス面54より撮像装置1に近く、右目用画像62における値が小さいときは、ポインター位置がコンバージェンス面54より遠いことが分かる。
【0083】
図10には、両画像において中心位置に当たるコンバージェンス点53と図7と図8に表わした適宜な点57も一緒に表わされている。
なお、ここでは、2つの撮像装置の主点の中点に原点を置いた直交座標系を使って説明をしているが、座標変換可能な他の座標系を使う場合でも、本質的に等価であることはいうまでもない。
【0084】
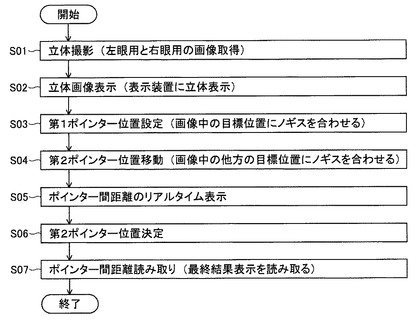
図11は、本実施形態に係る立体ノギス像の使用手順を説明するフロー図、図12は、本実施形態の立体ノギスのポインター位置設定手順を説明するフロー図である。
立体ノギスを使用するのに先立って、ノギスを当てる対象となる被測物の立体撮影を行う(S01)。立体撮影は、第1撮像装置11と第2撮像装置12により、左眼用の画像と右眼用の画像を取得する作業である。撮像装置はビデオカメラであってもよい。取得した左眼用画像と右眼用画像は、立体表示のための処理を行ってディスプレー4上に表示する(S02)。ディスプレー4に表示された被測物は、立体視用眼鏡を使うなど立体視化手法に従って、画像中に立体として観察できる。
【0085】
次に、第1ポインター42の位置を確定する(S03)。
第1ポインター42の位置確定は、図12に示す手順に従って行われる。まず、ポインター像表示装置21が、第1ポインター42と第2ポインター43の位置をディスプレー4の画面41中に表示させる(S11)。立体ノギス像として、第1ポインター42と第2ポインター43の位置にアンビルとスピンドルとを適宜対応させた立体ノギスの形状模写像を表示してもよい。なお、立体ノギス像は、コンピュータグラフィックスの技法を使って大きさや姿勢を実態に合わせて立体的に表示することが好ましい。
【0086】
オペレータは、ディスプレー4に表示された第1ポインター42の像を立体視で位置確認しながら、操作盤24のシーソースイッチ31と十字キー32を操作して、測定対象の一方の端点に当たる三次元位置に移動させる(S12)。
スイッチ類から出力される指令信号はポインター像表示装置21に伝送されて、指令通りにポインターの位置を変化させる。ポインターの位置情報は立体映像信号生成装置3に伝送され、立体視用画像に組み込まれて、ディスプレー4に表示される。
【0087】
第1ポインター42の位置が目的にかなう三次元位置になっているか否かは、目視により被測物との位置関係を判定して決定する。ポインターの奥行き位置は、オペレータが画面中の映像と比較して視覚で判定することができる。
立体ノギス像が表示されているときは、第1ポインター42の移動につれて対応するアンビルの部分も移動する。なお、ディスプレー4に表示されるアンビルの部分は、第1ポインター42のY座標値に応じて大きさが変化する。
【0088】
第1ポインター42が所望に位置にあることが判定できたら、押しボタンスイッチを押して位置を確定し、それ以後の第1ポインター42に関する移動用キーの操作を無効にする(S13)。
これにより、図11に示す、第1ポインター42の位置確定ができる(S03)。位置確定した第1ポインター42の位置に、ピンの像を立てて目印にしても良い。また、立体ノギス像が表示されているときは、第1ポインター42の位置が確定したときに、立体ノギス像のアンビルの位置が確定する。
【0089】
さらに、第2ポインター43を選択して、第1ポインター42と同様に図12に示す手順に従って、第2ポインター43の像を、測定対象の他方の端点に当たる三次元位置に移動させて、位置を確認した後、押しボタンスイッチを押して位置確定をする(S04−S06)。
立体ノギス像が表示されているときは、第2ポインター42の移動につれてスピンドルの部分も移動する。なお、ディスプレー4に表示されるスピンドル部分の大きさは、第2ポインター43のY座標値に応じて変化する。
【0090】
第2ポインター43の移動中も、第2ポインター43の座標は座標演算装置22により逐一算定されており、距離演算装置23がこれら座標値を使って第1ポインター42と第2ポインター43の間の距離を逐一算定している。算定した結果は、立体映像信号生成装置3で編成されて、ディスプレー4の表示面41の距離数値表示45にリアルタイムで表示されている(S05)。
【0091】
そこで、第2ポインター43の位置が確定されたら(S06)、そのときに距離数値表示45に表示されている距離値を読み取れば、その値が第1ポインター42と第2ポインター43で指定された測定対象における距離になる(S07)。
ここで表示される距離は、座標値から実寸に換算された実体距離とすることができる。
【0092】
なお、本実施形態では、立体ノギス像を使用して対象物の測定位置を確定するが、立体ノギス像の表示をせずに、ポインター自体を使って測定位置の確定をすることもできる。立体ノギス像を省くことにより、対象物周りの状態をより明瞭にディスプレー4に表示することができる。なお、ポインターは、ポイント位置のY軸方向距離に対応する大きさで表示することが好ましい。
また、立体ノギス像形成装置の適用先として、交差法配置された立体撮像装置を挙げているが、平行法配置の立体撮像装置においても、立体ノギス像の三次元位置を適宜に調整することにより、本発明の立体ノギス像形成装置を適用することができる。
【産業上の利用可能性】
【0093】
本発明の立体ノギス像形成装置を用いることにより、立体映像装置に表示される物体のサイズや物体間距離を立体的に測定することができるようになるので、特に立体内視鏡装置を用いた診断や手術などにおいて有効である。
【符号の説明】
【0094】
1 立体撮像装置
2 画像信号生成装置
3 映像信号生成装置
4 ディスプレー
5 立体ノギス像生成装置
11 第1の撮像装置
12 第2の撮像装置
13 コンバージェンス点
14,15 主点
16 内視鏡先端筒
18 コンバージェンス面
19 基準線
21 ポインター像表示装置
22 座標演算装置
23 距離演算装置
24 操作盤
25 記憶装置
31 Y軸用シーソースイッチ
32 十字キー
33 押しボタンスイッチ
34 押しボタンスイッチ
35 押しボタンスイッチ
36 ラチェット付きバーニア
37 トラッキングボール
38 アンビル
39 スピンドル
41 表示画面
42 ポインター像
43 ポインター像
44 結合線
45 距離数値表示
46 対象物像
47 立体ノギス像
48 フレーム
49 ラチェット付きバーニア
51,52 光軸
53 コンバージェンス点
54 コンバージェンス面
55 立体表示領域水平境界
56 立体表示領域垂直境界
57 観測点
61 左目用の画像
62 右目用の画像
63,64,65,66 表示された点
【特許請求の範囲】
【請求項1】
第1の撮像装置と第2の撮像装置とを備えた立体撮像装置と、画像信号生成装置と、立体映像信号生成装置と、ディスプレーと、を備えた立体映像表示装置において、
前記ディスプレーに表される立体画像中に表示されるポインターの位置を指定する操作端を備える操作盤と、
前記ポインターの位置情報を生成して供給するポインター像表示装置と、
前記ポインターの位置情報を入力して前記立体撮像装置に固定される座標系において該ポインターの3次元位置を表す座標値を算定する座標演算装置と、
前記立体画像中の2つのポインターについて算定された座標値に基づいて該2つのポインター間の実体距離値を算定して供給する距離演算装置と、
を備え、
前記立体映像信号生成装置が、前記ポインターの位置情報を入力して前記第1の撮像装置による画像と前記第2の撮像装置による画像のそれぞれにポインターの像を加えた画像信号を生成して前記ディスプレーに伝達し、前記2つのポインターの間の実体距離値を入力して数値表示する画像信号を生成して前記ディスプレーに伝達し、
前記ディスプレーが前記ポインターの像と前記2つのポインター間の実体距離値を表示する
立体映像表示装置の立体ノギス像形成装置。
【請求項2】
さらに、前記2つのポインターの位置を測定長の端点とする立体ノギス像を表示する画像信号を形成して供給する立体ノギス像表示装置を備えて、
前記立体映像信号生成装置が、前記立体ノギス像を表示する画像信号を入力して前記第1の撮像装置による画像と前記第2の撮像装置による画像のそれぞれに該立体ノギス像を加えて表示する画像信号を生成して前記ディスプレーに伝達し、
前記ディスプレーが該立体ノギス像を3次元表示すること
を特徴とする請求項1記載の立体ノギス像形成装置。
【請求項3】
前記立体撮像装置に固定される座標系は、前記2つの撮像装置の光軸が交差する角を2等分する2等分線を1つの座標軸とする直交座標系であることを特徴とする請求項1または2記載の立体ノギス像形成装置。
【請求項4】
前記第1の撮像装置による画像と前記第2の撮像装置による画像のそれぞれにおけるポインターの立体像位置は、前記第1の撮像装置と前記第2の撮像装置の光軸の交点であるコンバージェンス点における前記1つの座標軸に垂直なコンバージェンス面を、前記ポインターがあるべき位置に向けた前記第1の撮像装置の視線が通過する点の座標と前記ポインターに向けた前記第2の撮像装置の視線が通過する点の座標によりそれぞれ指定することを特徴とする請求項3記載の立体ノギス像形成装置。
【請求項5】
前記操作盤は、映像中の前記ポインターの位置を前記2つの撮像装置の光軸の交点の位置に移動させる操作端を備えることを特徴とする請求項1から4のいずれか1項に記載の立体ノギス像形成装置。
【請求項6】
前記第1の撮像装置と第2の撮像装置は、立体内視鏡のカメラである、請求項1から5のいずれか1項に記載の立体ノギス像形成装置。
【請求項7】
請求項6記載の立体ノギス像形成装置を備えた立体内視鏡装置。
【請求項8】
第1の撮像装置と第2の撮像装置とを備えた立体撮像装置と、画像信号生成装置と、立体映像信号生成装置と、ディスプレーとを備えた立体映像表示装置に適用する、ポインター像の位置を立体画像中で移動させる操作端を有する操作盤とコンピュータとを備えた立体ノギス像形成装置において、
該コンピュータを、
前記立体映像信号生成装置にポインターの位置情報を供給して、前記第1の撮像装置による画像と前記第2の撮像装置による画像のそれぞれにポインターの像を加えさせて該ポインターの位置を前記ディスプレーに3次元で表示させるポインター像表示手段と、
前記操作盤の操作端から入力される信号に基づいて、前記ポインターの位置を前記ディスプレーに表される立体画像中で移動させる手段と、
前記ポインターの3次元位置を立体撮像装置に固定される座標系の座標で表す座標演算手段と、
前記立体画像中の2つのポインターについて指定された座標に基づいて該2つのポインターの間の実体距離を算定して前記映像信号生成装置に伝達して、前記ディスプレーに該実体距離を数値表示させる距離演算手段として機能させるためのプログラム。
【請求項9】
前記ポインター像表示手段は、前記ポインターの位置を測定長の端点とする立体ノギス像を形成して前記ディスプレーに3次元で表示させることを特徴とする請求項8記載のプログラム。
【請求項1】
第1の撮像装置と第2の撮像装置とを備えた立体撮像装置と、画像信号生成装置と、立体映像信号生成装置と、ディスプレーと、を備えた立体映像表示装置において、
前記ディスプレーに表される立体画像中に表示されるポインターの位置を指定する操作端を備える操作盤と、
前記ポインターの位置情報を生成して供給するポインター像表示装置と、
前記ポインターの位置情報を入力して前記立体撮像装置に固定される座標系において該ポインターの3次元位置を表す座標値を算定する座標演算装置と、
前記立体画像中の2つのポインターについて算定された座標値に基づいて該2つのポインター間の実体距離値を算定して供給する距離演算装置と、
を備え、
前記立体映像信号生成装置が、前記ポインターの位置情報を入力して前記第1の撮像装置による画像と前記第2の撮像装置による画像のそれぞれにポインターの像を加えた画像信号を生成して前記ディスプレーに伝達し、前記2つのポインターの間の実体距離値を入力して数値表示する画像信号を生成して前記ディスプレーに伝達し、
前記ディスプレーが前記ポインターの像と前記2つのポインター間の実体距離値を表示する
立体映像表示装置の立体ノギス像形成装置。
【請求項2】
さらに、前記2つのポインターの位置を測定長の端点とする立体ノギス像を表示する画像信号を形成して供給する立体ノギス像表示装置を備えて、
前記立体映像信号生成装置が、前記立体ノギス像を表示する画像信号を入力して前記第1の撮像装置による画像と前記第2の撮像装置による画像のそれぞれに該立体ノギス像を加えて表示する画像信号を生成して前記ディスプレーに伝達し、
前記ディスプレーが該立体ノギス像を3次元表示すること
を特徴とする請求項1記載の立体ノギス像形成装置。
【請求項3】
前記立体撮像装置に固定される座標系は、前記2つの撮像装置の光軸が交差する角を2等分する2等分線を1つの座標軸とする直交座標系であることを特徴とする請求項1または2記載の立体ノギス像形成装置。
【請求項4】
前記第1の撮像装置による画像と前記第2の撮像装置による画像のそれぞれにおけるポインターの立体像位置は、前記第1の撮像装置と前記第2の撮像装置の光軸の交点であるコンバージェンス点における前記1つの座標軸に垂直なコンバージェンス面を、前記ポインターがあるべき位置に向けた前記第1の撮像装置の視線が通過する点の座標と前記ポインターに向けた前記第2の撮像装置の視線が通過する点の座標によりそれぞれ指定することを特徴とする請求項3記載の立体ノギス像形成装置。
【請求項5】
前記操作盤は、映像中の前記ポインターの位置を前記2つの撮像装置の光軸の交点の位置に移動させる操作端を備えることを特徴とする請求項1から4のいずれか1項に記載の立体ノギス像形成装置。
【請求項6】
前記第1の撮像装置と第2の撮像装置は、立体内視鏡のカメラである、請求項1から5のいずれか1項に記載の立体ノギス像形成装置。
【請求項7】
請求項6記載の立体ノギス像形成装置を備えた立体内視鏡装置。
【請求項8】
第1の撮像装置と第2の撮像装置とを備えた立体撮像装置と、画像信号生成装置と、立体映像信号生成装置と、ディスプレーとを備えた立体映像表示装置に適用する、ポインター像の位置を立体画像中で移動させる操作端を有する操作盤とコンピュータとを備えた立体ノギス像形成装置において、
該コンピュータを、
前記立体映像信号生成装置にポインターの位置情報を供給して、前記第1の撮像装置による画像と前記第2の撮像装置による画像のそれぞれにポインターの像を加えさせて該ポインターの位置を前記ディスプレーに3次元で表示させるポインター像表示手段と、
前記操作盤の操作端から入力される信号に基づいて、前記ポインターの位置を前記ディスプレーに表される立体画像中で移動させる手段と、
前記ポインターの3次元位置を立体撮像装置に固定される座標系の座標で表す座標演算手段と、
前記立体画像中の2つのポインターについて指定された座標に基づいて該2つのポインターの間の実体距離を算定して前記映像信号生成装置に伝達して、前記ディスプレーに該実体距離を数値表示させる距離演算手段として機能させるためのプログラム。
【請求項9】
前記ポインター像表示手段は、前記ポインターの位置を測定長の端点とする立体ノギス像を形成して前記ディスプレーに3次元で表示させることを特徴とする請求項8記載のプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2011−153995(P2011−153995A)
【公開日】平成23年8月11日(2011.8.11)
【国際特許分類】
【出願番号】特願2010−17179(P2010−17179)
【出願日】平成22年1月28日(2010.1.28)
【出願人】(395011218)エフ・エーシステムエンジニアリング株式会社 (7)
【出願人】(594044646)株式会社エヌエイチケイメディアテクノロジー (20)
【Fターム(参考)】
【公開日】平成23年8月11日(2011.8.11)
【国際特許分類】
【出願日】平成22年1月28日(2010.1.28)
【出願人】(395011218)エフ・エーシステムエンジニアリング株式会社 (7)
【出願人】(594044646)株式会社エヌエイチケイメディアテクノロジー (20)
【Fターム(参考)】
[ Back to top ]