
立体構造物の放熱診断装置及び放熱診断プログラム

【課題】立体構造物の側面の放熱診断を正確に行い、都市構造物全体での二酸化炭素排出量を推算し、国家単位での排出量削減に寄与することができる立体構造物の放熱診断装置及び放熱診断プログラムを提供する。
【解決手段】赤外線カメラが鉛直方向と所定の角度をなす方向から立体構造物の屋根・屋上等の上面と側面とを同時に撮影し、赤外線画像を生成すると、表面温度演算部38が立体構造物の表面の温度を演算し、熱変状箇所決定部40が、立体構造物の表面温度から放熱量が多い熱変状箇所を決定し、高度演算部42が、熱変状箇所の高度を演算する。さらに、二酸化炭素換算部44は、上記立体構造物の表面温度から消費電力量を求め、二酸化炭素排出量に換算する。表示制御部46は、赤外線カメラが取得した赤外線画像並びに、表面温度演算部38が演算した熱変状箇所の温度及び二酸化炭素換算部44が演算した二酸化炭素排出量等を表示装置26に表示させる。
【解決手段】赤外線カメラが鉛直方向と所定の角度をなす方向から立体構造物の屋根・屋上等の上面と側面とを同時に撮影し、赤外線画像を生成すると、表面温度演算部38が立体構造物の表面の温度を演算し、熱変状箇所決定部40が、立体構造物の表面温度から放熱量が多い熱変状箇所を決定し、高度演算部42が、熱変状箇所の高度を演算する。さらに、二酸化炭素換算部44は、上記立体構造物の表面温度から消費電力量を求め、二酸化炭素排出量に換算する。表示制御部46は、赤外線カメラが取得した赤外線画像並びに、表面温度演算部38が演算した熱変状箇所の温度及び二酸化炭素換算部44が演算した二酸化炭素排出量等を表示装置26に表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、立体構造物の放熱診断装置及び放熱診断プログラムに関する。
【背景技術】
【0002】
従来、ビル等の構造物を赤外線カメラで撮影して得た熱画像により、構造物の壁面内部における空隙等の内部変状の有無を解析する技術が提案されている。例えば、下記特許文献1には、非破壊・非接触で面的な調査が可能な熱映像を用いた構造物の変状診断システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−258188号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
立体構造物、特に高層ビル等の放熱診断を効率的に行うためには、構造物の上空から熱画像を取得し、構造物の屋根・屋上等からの熱放射量に加えて構造物側面からの熱放射量を把握する必要がある。しかし、上記従来の技術においては、側面における温度分布測定が困難であり、立体構造物の表面からの放熱診断を正確に行うことができないという問題があった。
【0005】
本発明の目的は、立体構造物の側面の放熱診断を正確に行うことができる立体構造物の放熱診断装置及び放熱診断プログラムを提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の第1の実施形態は、立体構造物の放熱診断装置であって、鉛直方向と所定の角度をなす方向から、立体構造物の赤外線画像を取得する赤外線撮像手段と、前記赤外線撮像手段が取得した赤外線画像から、前記立体構造物の表面の温度を演算する表面温度演算手段と、を備えることを特徴とする。
【0007】
また、第2の実施形態は、上記立体構造物の放熱診断装置が、さらに前記表面温度演算手段の演算結果から前記立体構造物の熱変状箇所を決定する熱変状箇所決定手段を備えることを特徴とする。
【0008】
また、第3の実施形態は、上記立体構造物の放熱診断装置が、さらに前記赤外線撮像手段の撮影方向と、数値表層モデルとに基づき、前記立体構造物の熱変状箇所の高度を演算する高度演算手段を備えることを特徴とする。
【0009】
また、第4の実施形態は、上記立体構造物の放熱診断装置が、さらに前記表面温度演算手段の演算結果に基づき、前記立体構造物の表面からの放熱量を、消費電力量を介して二酸化炭素排出量に換算する二酸化炭素換算手段を備えることを特徴とする。
【0010】
また、第5の実施形態は、上記立体構造物の放熱診断装置において、前記二酸化炭素換算手段が、前記立体構造物の表面の断熱処理が所定の理想状態である場合と比較して、現状の二酸化炭素排出量の過剰値を演算することを特徴とする。
【0011】
また、第6の実施形態は、上記立体構造物の放熱診断装置において、前記赤外線撮像手段が、航空機に搭載されていることを特徴とする。
【0012】
また、第7の実施形態は、立体構造物の放熱診断プログラムであって、コンピュータを、鉛直方向と所定の角度をなす方向から撮影した立体構造物の赤外線画像を取得する赤外線画像取得手段、前記赤外線画像から、前記立体構造物の表面の温度を演算する表面温度演算手段、とを備えることを特徴とする。
【発明の効果】
【0013】
本発明によれば、立体構造物の上面及び側面の放熱診断を正確に行うことができる。また、立体構造物単位の過剰熱放射量を合計することにより、都市構造物全体での二酸化炭素排出量を推算でき、国家単位での二酸化炭素排出量削減に寄与することができる。
【図面の簡単な説明】
【0014】
【図1】実施形態にかかる立体構造物の放熱診断装置の構成例を示す図である。
【図2】実施形態にかかる制御装置を構成するコンピュータのハードウェア構成の例を示す図である。
【図3】実施形態にかかる制御装置の機能ブロック図である。
【図4】実施形態にかかる高度演算部の演算処理の説明図である。
【図5】実施形態にかかる立体構造物の放熱診断装置により取得した都市部の赤外線画像の例を示す図である。
【図6】実施形態にかかる立体構造物の放熱診断装置の動作例のフロー図である。
【発明を実施するための形態】
【0015】
以下、本発明を実施するための形態(以下、実施形態という)を、図面に従って説明する。
【0016】
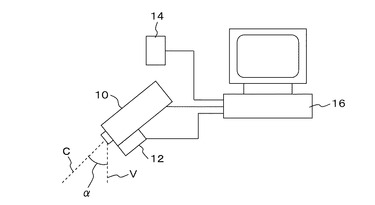
図1には、実施形態にかかる立体構造物の放熱診断装置の構成例が示される。図1において、立体構造物の放熱診断装置は、赤外線カメラ10、角度計測器12、座標計測装置14及び制御装置16を含んで構成されている。
【0017】
赤外線カメラ10は、対象物から出ている中間赤外線放射エネルギーを検出する量子型赤外線センサ(赤外線サーモグラフィカメラ)であり、対象物表面の赤外線画像(熱画像)を生成し、当該表面の温度を計測する。なお、ここで対象物とは、ビル、工場等の立体構造物をいう。なお、上記赤外線カメラ10は、波長が3〜8μmの中間赤外線を使用するのが好適である。上記波長範囲の中間赤外線を使用することにより、解像度を向上できるので、航空機等に搭載して広範囲の計測を行う際にも、高精度な計測を行うことができる。さらに、量子型赤外線センサであることから、シャッター速度を高速化することができるので、航空機等からの高速移動中での撮影も可能である。
【0018】
上記赤外線カメラ10は、図1に示されるように、鉛直方向Vと所定の角度α(例えば45度)をなす方向Cから撮影を行う構成となっている。これにより、地表面に存在するビル等の立体構造物の屋根・屋上等の上面と側面とを同時に撮影することが可能となる。これにより、立体構造物各表面の温度を時間差無く測定でき、放熱診断を正確に行うことができる。なお、図1の例では、赤外線カメラ10が斜め下方を撮影しているが、これは航空機等に搭載した場合の例である。一方、自動車等の車両に搭載し、斜め上方を撮影する構成としてもよい。
【0019】
角度計測器12は、赤外線カメラ10の撮影方向の方位角及び仰俯角を計測する。この撮影方向は、例えば赤外線カメラ10のレンズの光軸方向であり、予め100m〜200mといった遠方において、カメラレンズの光軸と、角度計測器12を構成するレーザ距離計等の光軸が略平行となるよう調整された角度計測器12を用いて、撮影対象である立体構造物を標的するよう角度計測器12の光軸方向を調整し、上記撮影方向の方位角及び仰俯角を計測する。この場合、撮影方向の方位角は、例えば従来公知の磁気センサにより地磁気の水平方向成分を検出することにより計測することができる。また、撮影方向の仰俯角は、従来公知の加速度センサ等を使用して計測する。なお、方位角の計測に磁気センサを用いる場合、センサの置き場所によっては設置場所周辺の磁界の歪の影響を受ける可能性がある。この場合は、磁気センサ設置場所周辺に磁界の歪が無い条件下と磁界の歪がある条件下で、同じ目標物を同じ地点から計測し、計測された方位角の差を求め、その差を方位角の補正値とすることができる。また、磁気センサの代わりに、赤外線カメラ10を搭載した航空機等の移動体に固定された軸に対する赤外線カメラ10の回転角度及び移動体の進行方向により上記方位角を計測する構成でもよい。
【0020】
座標計測装置14は、GPS(全地球測位システム)受信機を含んで構成され、赤外線カメラ10の撮影位置の座標値(例えば、経度、緯度、高度)を計測する。上記座標値の計測は、赤外線カメラ10のシャッターと同期して行うのが好適である。なお、座標計測装置14は、GPSデータを補完するためのジャイロ等を備えているのが好適である。
【0021】
制御装置16は、適宜なコンピュータにより構成され、赤外線カメラ10が生成した赤外線画像を表示し、立体構造物表面温度、熱変状部の位置決定、立体構造物表面からの放熱量の二酸化炭素換算等の処理を行う。
【0022】
なお、上記赤外線カメラ10、角度計測器12、座標計測装置14は、ヘリコプター等の航空機に搭載して、上空から赤外線画像を取得する構成が好適であるが、制御装置16は、航空機等に搭載せず、赤外線カメラ10、角度計測器12、座標計測装置14の計測データを適宜な通信手段または記憶媒体を介して取得する構成でもよい。
【0023】
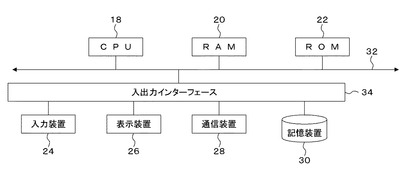
図2には、図1に示された制御装置16を構成するコンピュータのハードウェア構成の例が示される。図2において、制御装置16は、中央処理装置(例えばマイクロプロセッサ等のCPUを使用することができる)18、ランダムアクセスメモリ(RAM)20、読み出し専用メモリ(ROM)22、入力装置24、表示装置26、通信装置28及び記憶装置30を含んで構成されており、これらの構成要素は、バス32により互いに接続されている。また、入力装置24、表示装置26、通信装置28及び記憶装置30は、それぞれ入出力インターフェース34を介してバス32に接続されている。
【0024】
CPU18は、RAM20またはROM22に格納されている制御プログラムに基づいて、後述する各部の動作を制御する。RAM20は主としてCPU18の作業領域として機能し、ROM22にはBIOS等の制御プログラムその他のCPU18が使用するデータが格納されている。
【0025】
また、入力装置24は、キーボード、ポインティングデバイス等により構成され、使用者が動作指示等を入力するために使用する。
【0026】
また、表示装置26は、液晶ディスプレイ等により構成され、赤外線カメラ10が取得した赤外線画像等を表示する。なお、表示装置26は、他のコンピュータ等に設けてもよい。
【0027】
また、通信装置28は、USB(ユニバーサルシリアルバス)ポート、ネットワークポートその他の適宜なインターフェースにより構成され、CPU18がネットワーク等の通信手段を介して外部の装置とデータをやり取りするために使用する。なお、制御装置16は、赤外線カメラ10、角度計測器12、座標計測装置14の計測結果を通信装置28を介して取得する。
【0028】
また、記憶装置30は、ハードディスク等の記憶装置であり、後述する処理に必要となる種々のデータを記憶する。なお、記憶装置30としては、ハードディスクの代わりに、デジタル・バーサタイル・ディスク(DVD)、コンパクトディスク(CD)、光磁気ディスク(MO)、フレキシブルディスク(FD)、磁気テープ、電気的消去および書換可能な読出し専用メモリ(EEPROM)、フラッシュ・メモリ等を使用してもよい。
【0029】
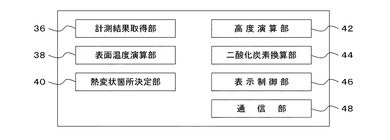
図3には、実施形態にかかる制御装置16の機能ブロック図が示される。図3において、制御装置16は、計測結果取得部36、表面温度演算部38、熱変状箇所決定部40、高度演算部42、二酸化炭素換算部44、表示制御部46及び通信部48を含んで構成されており、これらの機能は、例えばCPU18とCPU18の処理動作を制御するプログラムとにより実現される。
【0030】
計測結果取得部36は、赤外線カメラ10、角度計測器12及び座標計測装置14の計測結果を取得する。この場合、各測定結果は通信部48を介して取得する。取得した計測結果は、表面温度演算部38、熱変状箇所決定部40、高度演算部42、二酸化炭素換算部44及び表示制御部46に出力する。
【0031】
表面温度演算部38は、赤外線カメラ10が生成した赤外線画像から、撮影対象である立体構造物の表面の温度を演算する。
【0032】
熱変状箇所決定部40は、表面温度演算部38の演算結果から上記立体構造物の熱変状箇所を決定する。ここで、熱変状箇所とは、立体構造物の状態が当初の状態から変化し、表面からの放熱量が増加した状態をいう。例えば、断熱材や壁材の劣化、亀裂の発生等により、断熱性が低下した箇所等が含まれる。熱変状箇所決定部40は、断熱性が低下し、表面温度が周囲より高い(暖房時)、または低い(冷房時)箇所を熱変状箇所と決定する。また、利用者が、表示装置26に表示された赤外線画像を参照し、入力装置24から熱変状箇所として入力した箇所の情報に基づいて熱変状箇所決定部40が熱変状箇所と決定する構成としてもよい。
【0033】
高度演算部42は、角度計測器12が計測した赤外線カメラ10の撮影方向と、数値表層モデル(DSM)のデータとに基づき、上記立体構造物の熱変状箇所の高度を演算する。ここで、数値表層モデルは、建物等を含む全ての地表面の高度情報を表すデータであり、予め記憶装置30に記憶させておく。なお、数値表層モデルは、他のデータベースから通信部48が取得し、高度演算部42が記憶装置30に記憶させる構成であってもよい。高度演算部42は、測定対象の立体構造物が存在する領域の数値表層モデルを記憶装置30から読み出し、上記撮影方向とともに使用して、赤外線カメラ10が撮影した赤外線画像中の上記熱変状箇所の位置を演算する。演算方法は後述する。高度演算部42が測定対象の立体構造物が存在する領域を決定するには、座標計測装置14が計測した赤外線カメラ10の撮影位置の座標値(経度、緯度、高度)と、角度計測器12が計測した赤外線カメラ10の撮影方向とを使用する。すなわち、撮影位置の3次元の座標値から上記撮影方向(カメラレンズ光軸)を中心とする赤外線カメラ10の縦(鉛直)及び横(水平)方向の視野角により見込まれる領域を測定対象の立体構造物が存在する領域とする。
【0034】
二酸化炭素換算部44は、表面温度演算部38の演算結果に基づき、上記立体構造物の表面からの放熱量を消費電力量に換算し、さらにこの消費電力量を二酸化炭素排出量に換算する。この場合、二酸化炭素換算部44は、上記立体構造物の表面温度に基づき、ステファン・ボルツマンの法則により、それぞれの部位において熱放射量を算出し、これを電力量に換算した値に二酸化炭素排出係数を乗じて二酸化炭素排出量を演算する。また、変状箇所を過剰熱放射部位とし、この過剰熱放射部位の温度に基づき算出された二酸化炭素排出量から健全部位(変状箇所以外の部位)の温度に基づき算出された二酸化炭素排出量を減じて過剰二酸化炭素排出量を演算してもよい。また、二酸化炭素換算部44は、立体構造物の表面の断熱処理が所定の理想状態である場合と比較して、現状の二酸化炭素排出量の過剰値を演算してもよい。上記断熱処理の理想状態は、熱伝導率等により予め定めておく。なお、熱放射量と電力量との換算係数、電力量の二酸化炭素排出係数及び断熱処理の理想状態の熱伝導率等は、予め記憶装置30に記憶させておく。
【0035】
なお、上記ステファン・ボルツマンの法則は、以下の式(1)で表される。
Q[J/sm2K4]=σ×ε×T4 … (1)
ただし、Q:熱放射量
σ=5.67×10−8[J/sm2K4](ステファン・ボルツマン定数)
ε:放射率(例えばコンクリートに対しては0.95前後の値を用いるのが一 般的である)
T:立体構造物の表面温度(絶対温度)
【0036】
表示制御部46は、赤外線カメラ10が取得した赤外線画像、表面温度演算部38、熱変状箇所決定部40、高度演算部42及び二酸化炭素換算部44の処理結果等を表示装置26に表示させる。
【0037】
通信部48は、通信装置28を介して赤外線カメラ10、角度計測器12及び座標計測装置14の計測結果等を計測結果取得部36に渡す。また、他のデータベースから数値表層モデルを取得して高度演算部42に渡す構成としてもよい。
【0038】
図4(a),(b)には、高度演算部42の演算処理の説明図が示される。図4(a)において、赤外線カメラ10は、斜め下方(水平方向からの俯角τ度、鉛直方向と(90−τ)度の角度をなす)を撮影している。この撮影方向は、角度計測器12により計測される。このときの撮影対象は、地表面Gからの高さh0の立体構造物Bである。なお、地表面G、立体構造物B等の高さデータは、上記数値表層モデルから得ることができる。図4(a)の例では、赤外線カメラ10と立体構造物Bとの距離Lは、以下の式(2)で表される。
L=h1×tan{((180−2×τ+θ)×n−2×θ×i)÷(2×n)}
…(2)
ただし、h1は赤外線カメラ10の位置の高度(撮影高度)Hと立体構造物Bの高さh0との差(h1=H−h0)、θは赤外線カメラ10の縦方向(図4(a)では鉛直方向)の視野角、nは赤外線カメラ10の縦方向の画素数、iは図4(a)の上から下に向けて数えた赤外線カメラ10の画郭(1画素当たりの縦方向の撮影範囲)の番号であり、i=1〜nである。また、そのときの視野角範囲はθ1〜θnとして表示されている。なお、赤外線カメラ10の撮影高度Hは、座標計測装置14等により計測することができる。
【0039】
次に、熱変状箇所決定部40が決定した熱変状箇所等の立体構造物Bの表面における任意の点が上からj番目の画郭に含まれている場合に、当該j番目の画郭の上端位置をRj、上端位置Rjの地表面Gからの高度をhjとすると、hjは、以下の式(3)で表される。
hj=L×tan{((2×τ−θ)×n+2×θ×j)÷(2×n)} … (3)
【0040】
なお、図4(a)では、赤外線カメラ10の縦方向の画素数に応じてn個の画郭が存在し、上端位置としてR1からRnまでが設定されている。また、立体構造物Bの最上部が含まれる画郭の上端位置はRi、上端位置Riの地表面Gからの高度はhiとなっている。なお、R0は、赤外線カメラ10の縦方向の撮影範囲の上端を示している。
【0041】
図4(b)は、上記画郭の縦方向(図の上から下)の並びの説明図である。図4(b)では、Pj−1、Pj、Pj+1が各画郭を示しており、j番目の画郭Pjに熱変状箇所決定部40が決定した熱変状箇所が含まれているものとする。ここで、熱変状箇所の高度は、j番目の画郭Pjの下端位置Rj+1と、一つ上に位置するj−1番目の画郭Pj−1の下端位置Rjの中間として算出する。
【0042】
上述したように、各画郭の下端位置Rj−1、Rj等の地表面Gからの高度hj−1、hj等は、上記式(3)で算出できるので、上記熱変状箇所の高度を(hj−1+hj)÷2により算出することができる。
【0043】
なお、図4(a),(b)では、高度の演算処理を説明したが、各立体構造物Bの2次元地図上での位置(例えば緯度、経度等の座標値)は、数値表層モデルにより決定することができる。このため、熱変状箇所決定部40は、上記緯度、経度と高度演算部42が算出した高度とから熱変状箇所等の3次元座標値を決定することができる。
【0044】
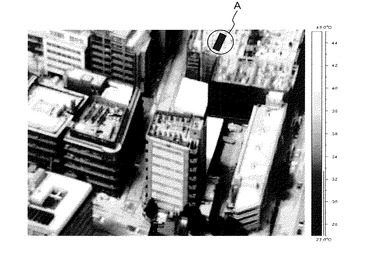
図5には、実施形態にかかる立体構造物の放熱診断装置により取得した都市部の赤外線画像の例が示される。図5では、立体構造物である各ビルの屋根・屋上等の上面と側面とが同時に撮影されている。図5において、赤外線画像は、温度が高いほど白く表示されている。
【0045】
本実施形態では、上記赤外線画像に基づいて、表面温度演算部38が立体構造物の各部の表面温度を演算する。また、上記赤外線画像を表示装置26に表示することにより、利用者が視覚的に立体構造物の各部の表面温度を観測することができる。
【0046】
熱変状箇所決定部40は、上記赤外線画像に基づいて表面温度演算部38が演算した立体構造物の各部の表面温度が周囲より高い(暖房時)、または低い(冷房時)箇所を熱変状箇所と決定する。暖房時であるか冷房時であるかの情報は、利用者が入力装置24から入力してもよい。熱変状箇所決定部40が熱変状箇所と決定した部位(図中では説明の都合上、塗り潰した四角枠として強調表示)には、図5に例示されるように、赤外線画像上に丸印A等を表示するのが好適である。この表示は、熱変状箇所決定部40の指示に基づき、表示制御部46が表示装置26に行わせる。
【0047】
また、上述したように、二酸化炭素換算部44は、表面温度演算部38の演算結果に基づいて、立体構造物の表面からの放熱量を二酸化炭素排出量に換算するが、この二酸化炭素排出量の数値等を、図5の赤外線画像上に表示する構成としてもよい。
【0048】
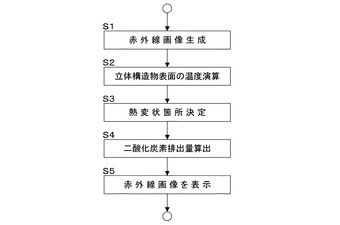
図6には、実施形態にかかる立体構造物の放熱診断装置の動作例のフローが示される。図6において、赤外線カメラ10により鉛直方向と所定の角度をなす方向から立体構造物の屋根・屋上等の上面と側面とを同時に撮影し、赤外線画像を生成する(S1)。
【0049】
計測結果取得部36が上記赤外線画像を取得し、表面温度演算部38が、この赤外線画像から立体構造物の表面の温度を演算する(S2)。熱変状箇所決定部40は、表面温度演算部38が演算した立体構造物の表面温度から、上記立体構造物の表面からの放熱量が多い熱変状箇所を決定する。また、この際に、高度演算部42が、上記熱変状箇所の高度を演算する(S3)。これにより、立体構造物の表面における熱変状箇所の高度情報を含む位置を特定することができる。
【0050】
また、二酸化炭素換算部44は、表面温度演算部38が演算した立体構造物の表面温度から消費電力量を求め、二酸化炭素排出量に換算する(S4)。
【0051】
これらのステップにより、都市部等において、二酸化炭素排出量、ヒートアイランド現象等を解析するに当たり、立体構造物における過剰熱放射量をより実態に即して3次元的に解析することができる。
【0052】
表示制御部46は、赤外線カメラ10が取得した赤外線画像並びに、表面温度演算部38が演算した熱変状箇所の温度及び二酸化炭素換算部44が演算した二酸化炭素排出量等を表示装置26に表示させる(S5)。
【0053】
上述した、図6の各ステップを実行するためのプログラムは、記録媒体に格納することも可能であり、また、そのプログラムを通信手段によって提供しても良い。その場合、例えば、上記説明したプログラムについて、「プログラムを記録したコンピュータ読み取り可能な記録媒体」の発明または「データ信号」の発明として捉えてもよい。
【符号の説明】
【0054】
10 赤外線カメラ、12 角度計測器、14 座標計測装置、16 制御装置、18 CPU、20 RAM、22 ROM、24 入力装置、26 表示装置、28 通信装置、30 記憶装置、32 バス、34 入出力インターフェース、36 計測結果取得部、38 表面温度演算部、40 熱変状箇所決定部、42 高度演算部、44 二酸化炭素換算部、46 表示制御部、48 通信部。
【技術分野】
【0001】
本発明は、立体構造物の放熱診断装置及び放熱診断プログラムに関する。
【背景技術】
【0002】
従来、ビル等の構造物を赤外線カメラで撮影して得た熱画像により、構造物の壁面内部における空隙等の内部変状の有無を解析する技術が提案されている。例えば、下記特許文献1には、非破壊・非接触で面的な調査が可能な熱映像を用いた構造物の変状診断システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−258188号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
立体構造物、特に高層ビル等の放熱診断を効率的に行うためには、構造物の上空から熱画像を取得し、構造物の屋根・屋上等からの熱放射量に加えて構造物側面からの熱放射量を把握する必要がある。しかし、上記従来の技術においては、側面における温度分布測定が困難であり、立体構造物の表面からの放熱診断を正確に行うことができないという問題があった。
【0005】
本発明の目的は、立体構造物の側面の放熱診断を正確に行うことができる立体構造物の放熱診断装置及び放熱診断プログラムを提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の第1の実施形態は、立体構造物の放熱診断装置であって、鉛直方向と所定の角度をなす方向から、立体構造物の赤外線画像を取得する赤外線撮像手段と、前記赤外線撮像手段が取得した赤外線画像から、前記立体構造物の表面の温度を演算する表面温度演算手段と、を備えることを特徴とする。
【0007】
また、第2の実施形態は、上記立体構造物の放熱診断装置が、さらに前記表面温度演算手段の演算結果から前記立体構造物の熱変状箇所を決定する熱変状箇所決定手段を備えることを特徴とする。
【0008】
また、第3の実施形態は、上記立体構造物の放熱診断装置が、さらに前記赤外線撮像手段の撮影方向と、数値表層モデルとに基づき、前記立体構造物の熱変状箇所の高度を演算する高度演算手段を備えることを特徴とする。
【0009】
また、第4の実施形態は、上記立体構造物の放熱診断装置が、さらに前記表面温度演算手段の演算結果に基づき、前記立体構造物の表面からの放熱量を、消費電力量を介して二酸化炭素排出量に換算する二酸化炭素換算手段を備えることを特徴とする。
【0010】
また、第5の実施形態は、上記立体構造物の放熱診断装置において、前記二酸化炭素換算手段が、前記立体構造物の表面の断熱処理が所定の理想状態である場合と比較して、現状の二酸化炭素排出量の過剰値を演算することを特徴とする。
【0011】
また、第6の実施形態は、上記立体構造物の放熱診断装置において、前記赤外線撮像手段が、航空機に搭載されていることを特徴とする。
【0012】
また、第7の実施形態は、立体構造物の放熱診断プログラムであって、コンピュータを、鉛直方向と所定の角度をなす方向から撮影した立体構造物の赤外線画像を取得する赤外線画像取得手段、前記赤外線画像から、前記立体構造物の表面の温度を演算する表面温度演算手段、とを備えることを特徴とする。
【発明の効果】
【0013】
本発明によれば、立体構造物の上面及び側面の放熱診断を正確に行うことができる。また、立体構造物単位の過剰熱放射量を合計することにより、都市構造物全体での二酸化炭素排出量を推算でき、国家単位での二酸化炭素排出量削減に寄与することができる。
【図面の簡単な説明】
【0014】
【図1】実施形態にかかる立体構造物の放熱診断装置の構成例を示す図である。
【図2】実施形態にかかる制御装置を構成するコンピュータのハードウェア構成の例を示す図である。
【図3】実施形態にかかる制御装置の機能ブロック図である。
【図4】実施形態にかかる高度演算部の演算処理の説明図である。
【図5】実施形態にかかる立体構造物の放熱診断装置により取得した都市部の赤外線画像の例を示す図である。
【図6】実施形態にかかる立体構造物の放熱診断装置の動作例のフロー図である。
【発明を実施するための形態】
【0015】
以下、本発明を実施するための形態(以下、実施形態という)を、図面に従って説明する。
【0016】
図1には、実施形態にかかる立体構造物の放熱診断装置の構成例が示される。図1において、立体構造物の放熱診断装置は、赤外線カメラ10、角度計測器12、座標計測装置14及び制御装置16を含んで構成されている。
【0017】
赤外線カメラ10は、対象物から出ている中間赤外線放射エネルギーを検出する量子型赤外線センサ(赤外線サーモグラフィカメラ)であり、対象物表面の赤外線画像(熱画像)を生成し、当該表面の温度を計測する。なお、ここで対象物とは、ビル、工場等の立体構造物をいう。なお、上記赤外線カメラ10は、波長が3〜8μmの中間赤外線を使用するのが好適である。上記波長範囲の中間赤外線を使用することにより、解像度を向上できるので、航空機等に搭載して広範囲の計測を行う際にも、高精度な計測を行うことができる。さらに、量子型赤外線センサであることから、シャッター速度を高速化することができるので、航空機等からの高速移動中での撮影も可能である。
【0018】
上記赤外線カメラ10は、図1に示されるように、鉛直方向Vと所定の角度α(例えば45度)をなす方向Cから撮影を行う構成となっている。これにより、地表面に存在するビル等の立体構造物の屋根・屋上等の上面と側面とを同時に撮影することが可能となる。これにより、立体構造物各表面の温度を時間差無く測定でき、放熱診断を正確に行うことができる。なお、図1の例では、赤外線カメラ10が斜め下方を撮影しているが、これは航空機等に搭載した場合の例である。一方、自動車等の車両に搭載し、斜め上方を撮影する構成としてもよい。
【0019】
角度計測器12は、赤外線カメラ10の撮影方向の方位角及び仰俯角を計測する。この撮影方向は、例えば赤外線カメラ10のレンズの光軸方向であり、予め100m〜200mといった遠方において、カメラレンズの光軸と、角度計測器12を構成するレーザ距離計等の光軸が略平行となるよう調整された角度計測器12を用いて、撮影対象である立体構造物を標的するよう角度計測器12の光軸方向を調整し、上記撮影方向の方位角及び仰俯角を計測する。この場合、撮影方向の方位角は、例えば従来公知の磁気センサにより地磁気の水平方向成分を検出することにより計測することができる。また、撮影方向の仰俯角は、従来公知の加速度センサ等を使用して計測する。なお、方位角の計測に磁気センサを用いる場合、センサの置き場所によっては設置場所周辺の磁界の歪の影響を受ける可能性がある。この場合は、磁気センサ設置場所周辺に磁界の歪が無い条件下と磁界の歪がある条件下で、同じ目標物を同じ地点から計測し、計測された方位角の差を求め、その差を方位角の補正値とすることができる。また、磁気センサの代わりに、赤外線カメラ10を搭載した航空機等の移動体に固定された軸に対する赤外線カメラ10の回転角度及び移動体の進行方向により上記方位角を計測する構成でもよい。
【0020】
座標計測装置14は、GPS(全地球測位システム)受信機を含んで構成され、赤外線カメラ10の撮影位置の座標値(例えば、経度、緯度、高度)を計測する。上記座標値の計測は、赤外線カメラ10のシャッターと同期して行うのが好適である。なお、座標計測装置14は、GPSデータを補完するためのジャイロ等を備えているのが好適である。
【0021】
制御装置16は、適宜なコンピュータにより構成され、赤外線カメラ10が生成した赤外線画像を表示し、立体構造物表面温度、熱変状部の位置決定、立体構造物表面からの放熱量の二酸化炭素換算等の処理を行う。
【0022】
なお、上記赤外線カメラ10、角度計測器12、座標計測装置14は、ヘリコプター等の航空機に搭載して、上空から赤外線画像を取得する構成が好適であるが、制御装置16は、航空機等に搭載せず、赤外線カメラ10、角度計測器12、座標計測装置14の計測データを適宜な通信手段または記憶媒体を介して取得する構成でもよい。
【0023】
図2には、図1に示された制御装置16を構成するコンピュータのハードウェア構成の例が示される。図2において、制御装置16は、中央処理装置(例えばマイクロプロセッサ等のCPUを使用することができる)18、ランダムアクセスメモリ(RAM)20、読み出し専用メモリ(ROM)22、入力装置24、表示装置26、通信装置28及び記憶装置30を含んで構成されており、これらの構成要素は、バス32により互いに接続されている。また、入力装置24、表示装置26、通信装置28及び記憶装置30は、それぞれ入出力インターフェース34を介してバス32に接続されている。
【0024】
CPU18は、RAM20またはROM22に格納されている制御プログラムに基づいて、後述する各部の動作を制御する。RAM20は主としてCPU18の作業領域として機能し、ROM22にはBIOS等の制御プログラムその他のCPU18が使用するデータが格納されている。
【0025】
また、入力装置24は、キーボード、ポインティングデバイス等により構成され、使用者が動作指示等を入力するために使用する。
【0026】
また、表示装置26は、液晶ディスプレイ等により構成され、赤外線カメラ10が取得した赤外線画像等を表示する。なお、表示装置26は、他のコンピュータ等に設けてもよい。
【0027】
また、通信装置28は、USB(ユニバーサルシリアルバス)ポート、ネットワークポートその他の適宜なインターフェースにより構成され、CPU18がネットワーク等の通信手段を介して外部の装置とデータをやり取りするために使用する。なお、制御装置16は、赤外線カメラ10、角度計測器12、座標計測装置14の計測結果を通信装置28を介して取得する。
【0028】
また、記憶装置30は、ハードディスク等の記憶装置であり、後述する処理に必要となる種々のデータを記憶する。なお、記憶装置30としては、ハードディスクの代わりに、デジタル・バーサタイル・ディスク(DVD)、コンパクトディスク(CD)、光磁気ディスク(MO)、フレキシブルディスク(FD)、磁気テープ、電気的消去および書換可能な読出し専用メモリ(EEPROM)、フラッシュ・メモリ等を使用してもよい。
【0029】
図3には、実施形態にかかる制御装置16の機能ブロック図が示される。図3において、制御装置16は、計測結果取得部36、表面温度演算部38、熱変状箇所決定部40、高度演算部42、二酸化炭素換算部44、表示制御部46及び通信部48を含んで構成されており、これらの機能は、例えばCPU18とCPU18の処理動作を制御するプログラムとにより実現される。
【0030】
計測結果取得部36は、赤外線カメラ10、角度計測器12及び座標計測装置14の計測結果を取得する。この場合、各測定結果は通信部48を介して取得する。取得した計測結果は、表面温度演算部38、熱変状箇所決定部40、高度演算部42、二酸化炭素換算部44及び表示制御部46に出力する。
【0031】
表面温度演算部38は、赤外線カメラ10が生成した赤外線画像から、撮影対象である立体構造物の表面の温度を演算する。
【0032】
熱変状箇所決定部40は、表面温度演算部38の演算結果から上記立体構造物の熱変状箇所を決定する。ここで、熱変状箇所とは、立体構造物の状態が当初の状態から変化し、表面からの放熱量が増加した状態をいう。例えば、断熱材や壁材の劣化、亀裂の発生等により、断熱性が低下した箇所等が含まれる。熱変状箇所決定部40は、断熱性が低下し、表面温度が周囲より高い(暖房時)、または低い(冷房時)箇所を熱変状箇所と決定する。また、利用者が、表示装置26に表示された赤外線画像を参照し、入力装置24から熱変状箇所として入力した箇所の情報に基づいて熱変状箇所決定部40が熱変状箇所と決定する構成としてもよい。
【0033】
高度演算部42は、角度計測器12が計測した赤外線カメラ10の撮影方向と、数値表層モデル(DSM)のデータとに基づき、上記立体構造物の熱変状箇所の高度を演算する。ここで、数値表層モデルは、建物等を含む全ての地表面の高度情報を表すデータであり、予め記憶装置30に記憶させておく。なお、数値表層モデルは、他のデータベースから通信部48が取得し、高度演算部42が記憶装置30に記憶させる構成であってもよい。高度演算部42は、測定対象の立体構造物が存在する領域の数値表層モデルを記憶装置30から読み出し、上記撮影方向とともに使用して、赤外線カメラ10が撮影した赤外線画像中の上記熱変状箇所の位置を演算する。演算方法は後述する。高度演算部42が測定対象の立体構造物が存在する領域を決定するには、座標計測装置14が計測した赤外線カメラ10の撮影位置の座標値(経度、緯度、高度)と、角度計測器12が計測した赤外線カメラ10の撮影方向とを使用する。すなわち、撮影位置の3次元の座標値から上記撮影方向(カメラレンズ光軸)を中心とする赤外線カメラ10の縦(鉛直)及び横(水平)方向の視野角により見込まれる領域を測定対象の立体構造物が存在する領域とする。
【0034】
二酸化炭素換算部44は、表面温度演算部38の演算結果に基づき、上記立体構造物の表面からの放熱量を消費電力量に換算し、さらにこの消費電力量を二酸化炭素排出量に換算する。この場合、二酸化炭素換算部44は、上記立体構造物の表面温度に基づき、ステファン・ボルツマンの法則により、それぞれの部位において熱放射量を算出し、これを電力量に換算した値に二酸化炭素排出係数を乗じて二酸化炭素排出量を演算する。また、変状箇所を過剰熱放射部位とし、この過剰熱放射部位の温度に基づき算出された二酸化炭素排出量から健全部位(変状箇所以外の部位)の温度に基づき算出された二酸化炭素排出量を減じて過剰二酸化炭素排出量を演算してもよい。また、二酸化炭素換算部44は、立体構造物の表面の断熱処理が所定の理想状態である場合と比較して、現状の二酸化炭素排出量の過剰値を演算してもよい。上記断熱処理の理想状態は、熱伝導率等により予め定めておく。なお、熱放射量と電力量との換算係数、電力量の二酸化炭素排出係数及び断熱処理の理想状態の熱伝導率等は、予め記憶装置30に記憶させておく。
【0035】
なお、上記ステファン・ボルツマンの法則は、以下の式(1)で表される。
Q[J/sm2K4]=σ×ε×T4 … (1)
ただし、Q:熱放射量
σ=5.67×10−8[J/sm2K4](ステファン・ボルツマン定数)
ε:放射率(例えばコンクリートに対しては0.95前後の値を用いるのが一 般的である)
T:立体構造物の表面温度(絶対温度)
【0036】
表示制御部46は、赤外線カメラ10が取得した赤外線画像、表面温度演算部38、熱変状箇所決定部40、高度演算部42及び二酸化炭素換算部44の処理結果等を表示装置26に表示させる。
【0037】
通信部48は、通信装置28を介して赤外線カメラ10、角度計測器12及び座標計測装置14の計測結果等を計測結果取得部36に渡す。また、他のデータベースから数値表層モデルを取得して高度演算部42に渡す構成としてもよい。
【0038】
図4(a),(b)には、高度演算部42の演算処理の説明図が示される。図4(a)において、赤外線カメラ10は、斜め下方(水平方向からの俯角τ度、鉛直方向と(90−τ)度の角度をなす)を撮影している。この撮影方向は、角度計測器12により計測される。このときの撮影対象は、地表面Gからの高さh0の立体構造物Bである。なお、地表面G、立体構造物B等の高さデータは、上記数値表層モデルから得ることができる。図4(a)の例では、赤外線カメラ10と立体構造物Bとの距離Lは、以下の式(2)で表される。
L=h1×tan{((180−2×τ+θ)×n−2×θ×i)÷(2×n)}
…(2)
ただし、h1は赤外線カメラ10の位置の高度(撮影高度)Hと立体構造物Bの高さh0との差(h1=H−h0)、θは赤外線カメラ10の縦方向(図4(a)では鉛直方向)の視野角、nは赤外線カメラ10の縦方向の画素数、iは図4(a)の上から下に向けて数えた赤外線カメラ10の画郭(1画素当たりの縦方向の撮影範囲)の番号であり、i=1〜nである。また、そのときの視野角範囲はθ1〜θnとして表示されている。なお、赤外線カメラ10の撮影高度Hは、座標計測装置14等により計測することができる。
【0039】
次に、熱変状箇所決定部40が決定した熱変状箇所等の立体構造物Bの表面における任意の点が上からj番目の画郭に含まれている場合に、当該j番目の画郭の上端位置をRj、上端位置Rjの地表面Gからの高度をhjとすると、hjは、以下の式(3)で表される。
hj=L×tan{((2×τ−θ)×n+2×θ×j)÷(2×n)} … (3)
【0040】
なお、図4(a)では、赤外線カメラ10の縦方向の画素数に応じてn個の画郭が存在し、上端位置としてR1からRnまでが設定されている。また、立体構造物Bの最上部が含まれる画郭の上端位置はRi、上端位置Riの地表面Gからの高度はhiとなっている。なお、R0は、赤外線カメラ10の縦方向の撮影範囲の上端を示している。
【0041】
図4(b)は、上記画郭の縦方向(図の上から下)の並びの説明図である。図4(b)では、Pj−1、Pj、Pj+1が各画郭を示しており、j番目の画郭Pjに熱変状箇所決定部40が決定した熱変状箇所が含まれているものとする。ここで、熱変状箇所の高度は、j番目の画郭Pjの下端位置Rj+1と、一つ上に位置するj−1番目の画郭Pj−1の下端位置Rjの中間として算出する。
【0042】
上述したように、各画郭の下端位置Rj−1、Rj等の地表面Gからの高度hj−1、hj等は、上記式(3)で算出できるので、上記熱変状箇所の高度を(hj−1+hj)÷2により算出することができる。
【0043】
なお、図4(a),(b)では、高度の演算処理を説明したが、各立体構造物Bの2次元地図上での位置(例えば緯度、経度等の座標値)は、数値表層モデルにより決定することができる。このため、熱変状箇所決定部40は、上記緯度、経度と高度演算部42が算出した高度とから熱変状箇所等の3次元座標値を決定することができる。
【0044】
図5には、実施形態にかかる立体構造物の放熱診断装置により取得した都市部の赤外線画像の例が示される。図5では、立体構造物である各ビルの屋根・屋上等の上面と側面とが同時に撮影されている。図5において、赤外線画像は、温度が高いほど白く表示されている。
【0045】
本実施形態では、上記赤外線画像に基づいて、表面温度演算部38が立体構造物の各部の表面温度を演算する。また、上記赤外線画像を表示装置26に表示することにより、利用者が視覚的に立体構造物の各部の表面温度を観測することができる。
【0046】
熱変状箇所決定部40は、上記赤外線画像に基づいて表面温度演算部38が演算した立体構造物の各部の表面温度が周囲より高い(暖房時)、または低い(冷房時)箇所を熱変状箇所と決定する。暖房時であるか冷房時であるかの情報は、利用者が入力装置24から入力してもよい。熱変状箇所決定部40が熱変状箇所と決定した部位(図中では説明の都合上、塗り潰した四角枠として強調表示)には、図5に例示されるように、赤外線画像上に丸印A等を表示するのが好適である。この表示は、熱変状箇所決定部40の指示に基づき、表示制御部46が表示装置26に行わせる。
【0047】
また、上述したように、二酸化炭素換算部44は、表面温度演算部38の演算結果に基づいて、立体構造物の表面からの放熱量を二酸化炭素排出量に換算するが、この二酸化炭素排出量の数値等を、図5の赤外線画像上に表示する構成としてもよい。
【0048】
図6には、実施形態にかかる立体構造物の放熱診断装置の動作例のフローが示される。図6において、赤外線カメラ10により鉛直方向と所定の角度をなす方向から立体構造物の屋根・屋上等の上面と側面とを同時に撮影し、赤外線画像を生成する(S1)。
【0049】
計測結果取得部36が上記赤外線画像を取得し、表面温度演算部38が、この赤外線画像から立体構造物の表面の温度を演算する(S2)。熱変状箇所決定部40は、表面温度演算部38が演算した立体構造物の表面温度から、上記立体構造物の表面からの放熱量が多い熱変状箇所を決定する。また、この際に、高度演算部42が、上記熱変状箇所の高度を演算する(S3)。これにより、立体構造物の表面における熱変状箇所の高度情報を含む位置を特定することができる。
【0050】
また、二酸化炭素換算部44は、表面温度演算部38が演算した立体構造物の表面温度から消費電力量を求め、二酸化炭素排出量に換算する(S4)。
【0051】
これらのステップにより、都市部等において、二酸化炭素排出量、ヒートアイランド現象等を解析するに当たり、立体構造物における過剰熱放射量をより実態に即して3次元的に解析することができる。
【0052】
表示制御部46は、赤外線カメラ10が取得した赤外線画像並びに、表面温度演算部38が演算した熱変状箇所の温度及び二酸化炭素換算部44が演算した二酸化炭素排出量等を表示装置26に表示させる(S5)。
【0053】
上述した、図6の各ステップを実行するためのプログラムは、記録媒体に格納することも可能であり、また、そのプログラムを通信手段によって提供しても良い。その場合、例えば、上記説明したプログラムについて、「プログラムを記録したコンピュータ読み取り可能な記録媒体」の発明または「データ信号」の発明として捉えてもよい。
【符号の説明】
【0054】
10 赤外線カメラ、12 角度計測器、14 座標計測装置、16 制御装置、18 CPU、20 RAM、22 ROM、24 入力装置、26 表示装置、28 通信装置、30 記憶装置、32 バス、34 入出力インターフェース、36 計測結果取得部、38 表面温度演算部、40 熱変状箇所決定部、42 高度演算部、44 二酸化炭素換算部、46 表示制御部、48 通信部。
【特許請求の範囲】
【請求項1】
鉛直方向と所定の角度をなす方向から、立体構造物の赤外線画像を取得する赤外線撮像手段と、
前記赤外線撮像手段が取得した赤外線画像から、前記立体構造物の表面の温度を演算する表面温度演算手段と、
を備えることを特徴とする立体構造物の放熱診断装置。
【請求項2】
請求項1記載の立体構造物の放熱診断装置が、さらに前記表面温度演算手段の演算結果から前記立体構造物の熱変状箇所を決定する熱変状箇所決定手段を備えることを特徴とする立体構造物の放熱診断装置。
【請求項3】
請求項2記載の立体構造物の放熱診断装置が、さらに前記赤外線撮像手段の撮影方向と、数値表層モデルとに基づき、前記立体構造物の熱変状箇所の高度を演算する高度演算手段を備えることを特徴とする立体構造物の放熱診断装置。
【請求項4】
請求項1から請求項3の何れか一項に記載の立体構造物の放熱診断装置が、さらに前記表面温度演算手段の演算結果に基づき、前記立体構造物の表面からの放熱量を、消費電力量を介して二酸化炭素排出量に換算する二酸化炭素換算手段を備えることを特徴とする立体構造物の放熱診断装置。
【請求項5】
請求項4記載の立体構造物の放熱診断装置において、前記二酸化炭素換算手段は、前記立体構造物の表面の断熱処理が所定の理想状態である場合と比較して、現状の二酸化炭素排出量の過剰値を演算することを特徴とする立体構造物の放熱診断装置。
【請求項6】
請求項1から請求項5の何れか一項に記載の立体構造物の放熱診断装置において、前記赤外線撮像手段は、航空機に搭載されていることを特徴とする立体構造物の放熱診断装置。
【請求項7】
コンピュータを、
鉛直方向と所定の角度をなす方向から撮影した立体構造物の赤外線画像を取得する赤外線画像取得手段、
前記赤外線画像から、前記立体構造物の表面の温度を演算する表面温度演算手段、
とを備えることを特徴とする立体構造物の放熱診断プログラム。
【請求項1】
鉛直方向と所定の角度をなす方向から、立体構造物の赤外線画像を取得する赤外線撮像手段と、
前記赤外線撮像手段が取得した赤外線画像から、前記立体構造物の表面の温度を演算する表面温度演算手段と、
を備えることを特徴とする立体構造物の放熱診断装置。
【請求項2】
請求項1記載の立体構造物の放熱診断装置が、さらに前記表面温度演算手段の演算結果から前記立体構造物の熱変状箇所を決定する熱変状箇所決定手段を備えることを特徴とする立体構造物の放熱診断装置。
【請求項3】
請求項2記載の立体構造物の放熱診断装置が、さらに前記赤外線撮像手段の撮影方向と、数値表層モデルとに基づき、前記立体構造物の熱変状箇所の高度を演算する高度演算手段を備えることを特徴とする立体構造物の放熱診断装置。
【請求項4】
請求項1から請求項3の何れか一項に記載の立体構造物の放熱診断装置が、さらに前記表面温度演算手段の演算結果に基づき、前記立体構造物の表面からの放熱量を、消費電力量を介して二酸化炭素排出量に換算する二酸化炭素換算手段を備えることを特徴とする立体構造物の放熱診断装置。
【請求項5】
請求項4記載の立体構造物の放熱診断装置において、前記二酸化炭素換算手段は、前記立体構造物の表面の断熱処理が所定の理想状態である場合と比較して、現状の二酸化炭素排出量の過剰値を演算することを特徴とする立体構造物の放熱診断装置。
【請求項6】
請求項1から請求項5の何れか一項に記載の立体構造物の放熱診断装置において、前記赤外線撮像手段は、航空機に搭載されていることを特徴とする立体構造物の放熱診断装置。
【請求項7】
コンピュータを、
鉛直方向と所定の角度をなす方向から撮影した立体構造物の赤外線画像を取得する赤外線画像取得手段、
前記赤外線画像から、前記立体構造物の表面の温度を演算する表面温度演算手段、
とを備えることを特徴とする立体構造物の放熱診断プログラム。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−133321(P2011−133321A)
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願番号】特願2009−292548(P2009−292548)
【出願日】平成21年12月24日(2009.12.24)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願日】平成21年12月24日(2009.12.24)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
[ Back to top ]