
立体物認識装置
【課題】周辺状況を検出するセンサの特性、制御装置による車両安定化の影響度、走行環境等の不確定要因に対して、立体物の認識結果に基づく制御を適切なタイミングで実行可能とする。
【解決手段】ステレオカメラ2の撮像画像に基づく画像立体物の存在確率を画像立体物存在確率算出部11で算出し、ミリ波レーダ3の出力に基づくミリ波立体物の存在確率をミリ波立体物存在確率算出部12で算出し、レーザレーダ4の出力に基づくレーザ立体物の存在確率をレーザ立体物存在確率算出部13で算出する。そして、存在確率補正部14で、画像立体物、ミリ波立体物、レーザ立体物のそれぞれの存在確率を、各認識センサの認識率に基づいて補正し、総合存在確率設定部15で、補正後の存在確率をフュージョンして総合存在確率を設定することで、障害物への接触回避や警報等の制御を確実且つ最適なタイミングで実行可能とする。
【解決手段】ステレオカメラ2の撮像画像に基づく画像立体物の存在確率を画像立体物存在確率算出部11で算出し、ミリ波レーダ3の出力に基づくミリ波立体物の存在確率をミリ波立体物存在確率算出部12で算出し、レーザレーダ4の出力に基づくレーザ立体物の存在確率をレーザ立体物存在確率算出部13で算出する。そして、存在確率補正部14で、画像立体物、ミリ波立体物、レーザ立体物のそれぞれの存在確率を、各認識センサの認識率に基づいて補正し、総合存在確率設定部15で、補正後の存在確率をフュージョンして総合存在確率を設定することで、障害物への接触回避や警報等の制御を確実且つ最適なタイミングで実行可能とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両周辺の状況を検出するセンサの出力値に基づいて自車両周辺に存在する立体物を認識する立体物認識装置に関する。
【背景技術】
【0002】
近年、自動車等の車両においては、車両に搭載したカメラやミリ波レーダ・レーザレーダ等により車外環境を検出して走行方向に存在する立体物を認識する技術が開発され、衝突回避制御等の車両制御に適用されている。
【0003】
このような立体物の認識技術においては、一般に、カメラやミリ波レーダ・レーザレーダ等を代表とする認識センサが用いられているが、これらの認識センサは、走行環境によって検出精度にばらつきが生じるという問題がある。このため、最近では、カメラやミリ波レーダ・レーザレーダレーダ等の複数のセンサを車両に搭載し、各センサで検出した結果を組み合わせて前方立体物を認識するセンサフュージョンと呼ばれる手法が提案されている。
【0004】
例えば、特許文献1には、ミリ波レーダとカメラを含む画像認識装置で検出した各データに基づき、この各データの確かさを示す確率分布を求め、同じデータ値に関する複数の確率分布の積を取ることによってデータをフュージョンし、最も高い確率を示すデータ値に基づいて前方立体物の種別を調べる技術が開示されている。
【0005】
特許文献1に開示されている技術によれば、ある前方認識手段で検出したデータに基づいて求めた確率分布の確率が低下した場合であっても、他の前方認識手段で検出したデータに基づいて求めた確率分布が高い確率を示していれば、この高い確率のデータ値を用いて前方立体物の種別を認識することができる。
【特許文献1】特開2005−165421号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示されているように、単に確率分布の高さで立体物を判断するのみでは、周辺状況を検出するセンサの特性、制御装置による車両安定化の影響度や走行環境等の不確定要因により、立体物と自車両との接触(衝突)に対する回避制御や警報制御等の作動タイミングが早すぎる或いは遅すぎる事態が発生し、必ずしも適切な制御タイミングとならない虞がある。
【0007】
本発明は上記事情に鑑みてなされたもので、周辺状況を検出するセンサの特性、制御装置による車両安定化の影響度、走行環境等の不確定要因に対して、立体物の認識結果に基づく制御を適切なタイミングで実行可能とする立体物認識装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明による第1の立体物認識装置は、自車両周辺の状況を検出するセンサの出力値に基づいて自車両周辺に存在する立体物を認識する立体物認識装置において、上記立体物の存在確率を、上記センサの出力値の真値を中心とする正規分布に基づいて算出する存在確率算出手段と、上記正規分布による存在確率を、上記センサの認識率に基づいて補正する存在確率補正手段と、複数の上記センサに対して上記認識率で補正した存在確率をフュージョンし、総合存在確率として設定する総合存在確率設定手段とを備えたことを特徴とする。
【0009】
本発明による第2の立体物認識装置は、自車両周辺の状況を検出するセンサの出力値に基づいて自車両周辺に存在する立体物を認識する立体物認識装置において、上記立体物の存在確率を、上記センサの出力値の真値を中心とする正規分布に基づいて算出する存在確率算出手段と、上記立体物の存在確率を車載制御装置の車両安定化への影響度に応じて重み付け可変し、総合存在確率として設定する総合存在確率算出手段とを備えたことを特徴とする。
【0010】
本発明による第3の立体物認識装置は、自車両周辺の状況を検出するセンサの出力値に基づいて自車両周辺に存在する立体物を認識する立体物認識装置において、上記立体物の存在確率を、上記センサの出力値の真値を中心とする正規分布に基づいて算出する存在確率算出手段と、上記立体物の存在確率を車両の走行環境に応じて重み付け可変し、総合存在確率として設定する総合存在確率算出手段とを備えたことを特徴とする。
【発明の効果】
【0011】
本発明による立体物認識装置は、周辺状況を検出するセンサの特性、制御装置による車両安定化の影響度、走行環境等の不確定要因に対して、立体物の認識結果に基づく制御を適切なタイミングで実行可能とすることができる。
【発明を実施するための最良の形態】
【0012】
以下、図面を参照して本発明の実施の形態を説明する。図1〜図5は本発明の実施の第1形態に係り、図1は立体物認識装置のブロック図、図2は総合存在確率設定処理のフローチャート、図3は認識センサによる立体物の存在確率算出処理を示すフローチャート、図4は判定対象とする立体物の統計的な位置の推移を示す説明図、図5は存在確率の説明図である。
【0013】
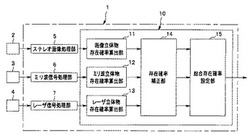
図1において、符号1は、自動車等の車両に搭載され、外界状況を検出する認識センサからの信号を処理して立体物を認識する立体物認識装置であり、立体物の認識結果を図示しない車両制御装置に出力し、立体物と自車との接触(衝突)に対する警報制御や回避制御等を実行させる。本形態においては、ステレオカメラ2、ミリ波レーダト3、レーザレーダ4の異なる検出特性を有する3種類の認識センサを車両に搭載し、各認識センサの出力に基づいて認識される立体物の存在確率を統合して高精度に立体物を認識する例について説明する。
【0014】
立体物認識装置1には、ステレオカメラ2で撮像した撮像信号を処理するステレオ画像処理部5、ミリ波レーダ3からの信号を処理するミリ波信号処理部6、レーザレーダ4からの信号を処理するレーザ信号処理部7が備えられ、各処理部5〜7で、それぞれ、画像、ミリ波信号、レーザ信号に基づいて立体物が抽出される。これらの処理部5〜7で抽出した立体物の情報は、立体物認識部10に送られ、各認識センサからの信号に基づく立体物を統合した総合存在確率で立体物が認識される。
【0015】
ステレオカメラ2は、固体撮像素子を搭載する左右一対のカメラ(CCDカメラやCMOSカメラ)を所定の基線長で配設して構成され、車外風景を異なる視点からステレオ撮像する。このステレオカメラ2は、例えば、車室内のルームミラー上方に取り付けられ、車外風景をステレオ撮像した画像をステレオ画像処理部5に出力する。
【0016】
ステレオ画像処理部5は、ステレオカメラ2で撮像したステレオ画像に基づき、検出した立体物(以下、「画像立体物」と称する)の位置のずれ量から三角測量の原理によって距離データを生成し、この距離データに基づいて、周知のグルーピング処理や予め記憶しておいた立体物データと比較し、車両や歩行者等の立体物を抽出する。そして、画像立体物を特定する特徴量(画像特徴量)として、例えば、車両を原点とする車体前後方向の距離座標値、車幅方向の位置座標値、相対速度(距離座標の時間的変化)等を算出する。
【0017】
また、ミリ波レーダ3は、例えば、車両前端部の車幅方向略中央に取付けられ、複数本のミリ波のビームを放射状に出射する。すなわち、ミリ波レーダ3から出射されるミリ波は、レーザレーダ4のレーザ光に比べて細く絞ることが困難であるため、複数本のミリ波のビームを放射状に出射して立体物からの反射波を受波することにより、立体物を検出する。
【0018】
ミリ波信号処理部6は、ミリ波レーダ3からの検出信号に基づき立体物(以下、「ミリ波立体物」と称する)を特定する特徴量(ミリ波特徴量)を求める。例えば、ミリ波特徴量として、ミリ波レーダ3によるミリ波の送信から受信までの時間に基づいて、車体前後方向の距離座標値を求め、複数本のビームのうちで反射波が受波されたビームの送信方向に基づいて、車幅方向の位置座標値を求める。更に、ドップラー原理に基づいて、距離座標値の変化から相対速度を求める。
【0019】
一方、レーザレーダ4は、細く絞ったレーザ光を出射可能であり、細幅のレーザ光を所定の視野角で走査しながらパルス照射し、立体物からの反射光を受光する。このレーザレーダ4は、ミリ波レーダ3とほぼ同じ位置に取付けられ、例えば、車両の前方に送信した細幅のレーザ光を車幅方向(或いは車幅方向と高さ方向)に所定の視野角を有して走査しながらパルス照射する。
【0020】
レーザ信号処理部7は、レーザレーダ4からの検出信号に基づき立体物(以下、「レーザ立体物」と称する)を特定する特徴量(レーザ特徴量)を求める。例えば、レーザ特徴量として、レーザレーダ4によるレーザ光の送光から受光までの時間に基づいて、車体前後方向の距離座標値を求め、反射光が受光されたときのレーザ光の送光方向に基づいて、車幅方向の位置座標値を求め、更に距離座標値の時間的変化から相対速度を求める。
【0021】
尚、上述した各処理部5〜7で検出される各立体物の特徴量を表す座標系は、基準となる座標系(例えば、画像立体物を認識する座標系)に整合されて設定されている。
【0022】
以上の各処理部5〜7で抽出された立体物のデータは、立体物認識部10に転送される。立体物認識部10には、画像に基づいて検出された画像立体物の存在確率を算出する画像立体物存在確率算出部11、ミリ波に基づいて検出されたミリ波立体物の存在確率を算出するミリ波立体物存在確率算出部12、レーザ光に基づいて検出されたレーザ立体物の存在確率を算出するレーザ立体物存在確率算出部13が備えられ、個々の認識センサ毎に存在確率が算出される。
【0023】
尚、後述するように、本形態においては、画像立体物、ミリ波立体物、レーザ立体物のそれぞれの存在確率は、基本的に同様のアルゴリズムを用いて算出される。
【0024】
また、立体物認識部10には、存在確率補正部14と総合存在確率設定部15とが備えられている。存在確率補正部14は、各認識センサ毎の存在確率を各認識センサの特性に基づいて補正し、この補正された存在確率を総合存在確率設定部15に送る。総合存在確率設定部15は、各認識センサをセンサフュージョンした立体物の認識結果としての総合存在確率を設定する。
【0025】
詳細には、各認識センサ毎の存在確率、各存在確率の補正、及び総合存在確率の設定は、図2,図3のフローチャートに示すプログラム処理を経て算出される。以下、これらの処理について、図2,図3のフローチャートを用いて説明する。
【0026】
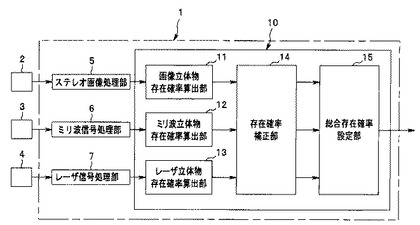
図2のフローチャートは、総合存在確率設定処理を示しており、先ず、ステップS1でステレオ画像処理部5の機能として、ステレオカメラ2で撮像したステレオ画像を読込んで画像立体物を抽出し、その位置座標や相対速度等の特徴量を算出する。次いで、ステップS2へ進み、画像立体物の存在確率Pisを算出する。
【0027】
続くステップS3は、ミリ波信号処理部6の機能として、ミリ波レーダ3で検出したミリ波信号を読み込んでミリ波立体物の位置座標や相対速度等を算出し、ステップS4でミリ波立体物の存在確率Pmsを算出する。
【0028】
更に、ステップS5へ進み、レーザ信号処理部7の機能として、レーザレーダ4からのレーザ信号を読み込み、読み込んだレーザ信号からレーザ立体物の位置座標や相対速度等を算出する。そして、ステップS6で、レーザ立体物の存在確率Plsを算出する。
【0029】
次に、ステップS7へ進み、存在確率補正部14の機能として、画像立体物、ミリ波立体物、レーザ立体物のそれぞれの存在確率Pis,Pms,Plsを、各認識センサの特性に基づいて補正する。この補正は、センサの認識理論値を基本として、実験或いはシミュレーションにより最適な補正値を設定するものであり、各認識センサの認識率は、センサ固有の検出特性に依存するパラメータ、例えば、物体の検出が一時的に不能となるロスト率、物体を正しく検出できる正認識率、物体の検出を誤る誤認識率等を用いる。
【0030】
そして、以下の(1)〜(3)式に示すように、ステレオカメラ2、ミリ波レーダ3、レーザレーダ4に基づいて算出されるそれぞれの存在確率Pis,Pms,Plsを、ステレオカメラ2の認識率Ki、ミリ波レーダ3の認識率Km、レーザレーダ4の認識率Klを用いて補正し、補正後の存在確率Pi,Pm,Plを得る。
Pi=Pis×Ki…(1)
Pm=Pms×Km…(2)
Pl=Pls×Kl…(3)
【0031】
その後、ステップS8へ進み、総合存在確率設定部15の機能として、ステレオカメラ2による存在確率Pi、ミリ波レーダ3による存在確率Pm、レーザレーダ4による存在確率Plを統括し、以下の(4)式により、センサフュージョンによる立体物の総合存在確率Pとして設定する。
P=1−(1−Pi)×(1−Pm)×(1−Pl)…(4)
【0032】
以上の処理で算出された総合存在確率Pは、その値の大きさに応じて、そのままの状態維持、障害物情報表示、警報制御、自動ブレーキ制御等の実行に適用される。この場合、(4)式による総合存在確率Pは、画像立体物の非存在確率(1−Pi)、ミリ波立体物の非存在確率(1−Pm)、レーザ立体物の非存在確率(1−Pl)に基づいて設定されるものであり、立体物を認識していないセンサがある場合、例えば、画像がロストしている場合には、ミリ波とレーザとによる存在確率が設定される。
【0033】
これにより、障害物への接触回避や警報等の制御の作動タイミングを、存在確率が高いときには早く、低いときには遅くすることができ、確実且つ最適なタイミングでの制御を可能とすることができる。更には、検出信頼度が低い障害物への誤制御を回避することができる。
【0034】
尚、上述の(4)式による総合存在確率Pに代えて、各認識センサの信頼度を考慮して総合存在確率Pを設定するようにしても良い。すなわち、ミリ波レーダ3の信頼度をα、レーザレーダ4の信頼度をβ、ステレオカメラ2の信頼度をγとする場合、以下の(5)式により、総合存在確率Pを設定する。
P=(Pm×α)+(Pl×β)+(Pi×γ)…(5)
但し、(5)式において、α+β+γ=1であり、各認識センサの信頼度α,β,γは、ミリ波、レーザ、画像の順に信頼度が高いものとして、例えば、α:β:γ=5:3:2の比率に設定される。
【0035】
(5)式による総合存在確率Pでは、ステレオカメラ2、ミリ波レーダ3、レーザレーダ4の何れかのセンサが不検出状態になった場合、該当センサによる立体物の存在確率を0とおけば良く、同様に、制御の作動タイミングを、存在確率が高いときには早く、低いときには遅くすることができ、確実且つ最適なタイミングでの制御を可能にすると共に、検出信頼度が低い障害物への誤制御を回避することができる。
【0036】
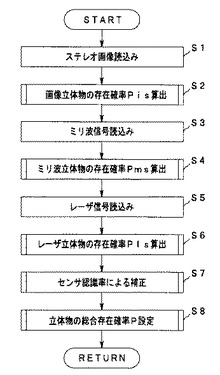
次に、各認識センサによる存在確率の算出処理について説明する。本形態においては、画像立体物、ミリ波立体物、レーザ立体物のそれぞれの存在確率は、基本的に同様の演算アルゴリズムを用いて算出される。この存在確率の演算アルゴリズムは、概略的には、判定対象とする立体物の挙動を考慮した確率分布の演算を行うものであり、ここでは、各認識センサによる存在確率の算出処理を図3の存在確率算出処理で代表し、各認識センサによる存在確率Pis,Pms,Plsを存在確率Rで代表して説明する。
【0037】
この存在確率算出処理では、先ず、ステップS101で、演算に必要な情報(例えば、画像情報や自車両の車速V0等)の読み込みを行う。次に、ステップS102へ進み、判定対象とする立体物(例えば、自車両の進行路上にある最も近い立体物)を抽出し、この立体物までの距離x、立体物の前後方向速度Vx(距離xの微分値+自車速V0)、立体物の前後方向加速度ax(前後方向速度Vxの微分値)等の各データを取得する。
【0038】
次いで、ステップS103に進み、判定対象とする立体物までの距離x、前後方向速度Vx(距離xの微分値+自車速V0)、前後方向加速度ax(前後方向速度Vxの微分値)等の各データを基に、これらの各データが真値(本形態においては平均値)を中心に、車両の前後方向を軸(x軸)とする正規分布で出力されていると仮定し、以下の(7)〜(9)式により、現在の前後方向加速度ax(0)、現在の前後方向速度Vx(0)、現在の前後方向位置x(0)を統計処理にて演算する。
【0039】
尚、以下の正規分布において、−∞<x<∞であり、正規分布の分散は正の値である。また、以下の前後方向加速度、前後方向速度、前後方向位置の統計演算においては、正規分布の平均値μ,分散σ2による(6)式の確率密度関数rを適用する。
r=(1/((2・π)1/2・σ))・exp(−(x−μ)2/(2・σ2))…(6)
【0040】
すなわち、現在の前後方向加速度ax(0)は、現在の前後方向加速度の平均値ax(0)aと、現在の前後方向加速度の偏差σax(0)で示される分散σax(0)2を有する正規分布として、以下の(7)式に示すように、ax(ax(0)a,σax(0)2)で演算される。
ax(0)=ax(ax(0)a,σax(0)2)
=(1/((2・π)1/2・σax(0)))・exp(−(x−ax(0)a)2/(2・σax(0)2))…(7)
【0041】
また、現在の前後方向速度Vx(0)は、現在の前後方向速度の平均値Vx(0)aと、現在の前後方向速度の偏差σvx(0)で示される分散σvx(0)2を有する正規分布として、以下の(8)式に示すように、Vx(Vx(0)a,σvx(0)2)で演算される。
Vx(0)=Vx(Vx(0)a,σvx(0)2)
=(1/((2・π)1/2・σvx(0)))・exp(−(x−Vx(0)a)2/(2・σvx(0)2))…(8)
【0042】
更に、現在の前後方向位置x(0)は、現在の前後方向位置の平均値x(0)aと、現在の前後方向位置の偏差σx(0)で示される分散σx(0)2を有する正規分布として、以下の(9)式に示すように、x(x(0)a,σx(0)2)で演算される。
x(0)=x(x(0)a,σx(0)2)
=(1/((2・π)1/2・σx(0)))・exp(−(x−x(0)a)2/(2・σx(0)2))…(9)
【0043】
尚、上述の各分散σax(0)2,σvx(0)2,σx(0)2は、認識センサや認識対象物によって予め設定しておいた値であり、ステレオカメラ2による認識に比較し、ミリ波レーダ3やレーザレーダ4による認識では、速度精度が高いので分散は小さく設定することができる。
【0044】
次に、ステップS104に進み、判定対象とする立体物の現在の前後方向加速度ax(0)、前後方向速度Vx(0)、前後方向位置x(0)に基づいて、Δt秒後(例えば、0.5秒後)の前後方向加速度ax(Δt)、前後方向速度Vx(Δt)、前後方向位置x(Δt)を、以下の(10)〜(12)式により統計処理にて演算する。
【0045】
すなわち、Δt秒後の前後方向加速度ax(Δt)は、Δt秒後の前後方向加速度の平均値ax(Δt)aと、Δt秒後の前後方向加速度の偏差σax(Δt)で示される分散σax(Δt)2を有する正規分布として、ax(ax(Δt)a,σax(Δt)2)で演算される。尚、本形態においては、等加速度運動と仮定して求めるものとする。
ax(Δt)=ax(ax(Δt)a,σax(Δt)2)
=ax(ax(0)a,σax(0)2)…(10)
【0046】
また、Δt秒後の前後方向速度Vx(Δt)は、Δt秒後の前後方向速度の平均値Vx(Δt)aと、Δt秒後の前後方向速度の偏差σvx(Δt)で示される分散σvx(Δt)2を有する正規分布として、Vx(Vx(Δt)a,σvx(Δt)2)で演算される。この際、現在の前後方向加速度ax(0)、前後方向速度Vx(0)を用いて、以下の(11)式の通り演算する。
Vx(Δt)=Vx(Vx(Δt)a,σvx(Δt)2)
=Vx(Vx(0)a,σvx(0)2)+ax(ax(0)a,σax(0)2)・Δt
=Vx(Vx(0)a+ax(0)a・Δt,(σvx(0)+σax(0)・Δt)2)…(11)
【0047】
更に、Δt秒後の前後方向位置x(Δt)は、Δt秒後の前後方向位置の平均値x(Δt)aと、Δt秒後の前後方向位置の偏差σx(Δt)で示される分散σx(Δt)2を有する正規分布として、x(x(Δt)a,σx(Δt)2)で演算される。この際、現在の前後方向加速度ax(0)、前後方向速度Vx(0)、前後方向位置x(0)を用いて、以下の(12)式の通り演算する。
x(Δt)=x(x(Δt)a,σx(Δt)2)
=x(x(0)a,σx(0)2)+Vx(Vx(0)a,σvx(0)2)・Δt+(1/2)・ax(ax(0)a,σax(0)2)・Δt2
=x(x(0)a+Vx(0)a・Δt+(1/2)・ax(0)a・Δt2,(σx(0)+σvx(0)・Δt+(1/2)・σax(0)・Δt2)2)…(12)
【0048】
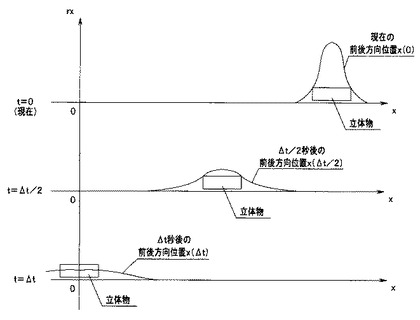
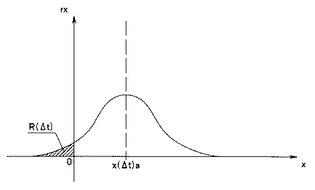
その後、ステップS105へ進み、判定対象とする立体物のΔt秒後の前後方向位置x(Δt)を基に、以下の(13)式により、Δt秒後の立体物の存在確率R(Δt)を演算する。
R(Δt)=∫(x(x(Δt)a,σx(Δt)2))dx…(13)
(但し、積分範囲は、−∞<x<0)
【0049】
すなわち、判定対象とする立体物の現在の前後方向位置x(0)が正規分布で示されるとすると、Δt/2秒後の前後方向位置x(Δt/2)、Δt秒後の前後方向位置x(Δt)は、図4に示すような位置になると推定される。従って、前後方向位置に関する正規分布の確率密度関数をリスクを評価するリスク関数rxとして導入し、図5に示すように、自車両の位置をx軸上の0と仮定して積分し(積分範囲:−∞<x<0)、その面積(t秒後のリスク関数rxの値)を存在確率R(Δt)として演算するのである。
【0050】
尚、判定対象とする立体物のΔt秒後の前後方向位置x(Δt)は、正規分布の関数であるため、−∞<x<∞における積分の結果は、1.0である。
【0051】
これにより、自車両と立体物との接触(衝突)の危険性等のリスク分布を連続的に把握することができ、信頼度の低い情報に基づく誤制御を防止し、予防安全性を向上することができる。
【0052】
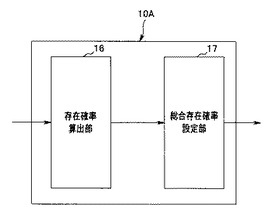
次に、本発明の実施の第2形態について説明する。図6は、本発明の実施の第2形態に係り、立体物認識部のブロック図である。
【0053】
第2形態は、立体物の存在確率を、認識センサ以外の要因に応じて重み付け可変するものであり、その要因として、車両制御装置側の車両安定化への影響度や車両の走行環境を考慮する。
【0054】
第2形態においては、認識センサとして、ステレオカメラ2、ミリ波レーダト3、レーザレーダ4の少なくとも1つのセンサを有する場合にも適用可能であり、図6に示すように、第1形態の立体物認識部10を、存在確率算出部16と総合存在確率設定部17とを有する立体物認識部10Aとする。この場合、存在確率算出部16で算出する存在確率Psは、画像立体物の存在確率Pis、ミリ波立体物の存在確率Pms、レーザ立体物の存在確率Plsを代表するものとする。存在確率Psの演算アルゴリズムは、第1形態と同様である。
【0055】
総合存在確率設定部17では、車両制御装置側の車両安定化への影響度を考慮する場合、アンチロックブレーキ制御装置(ABS装置)やビークルダイナミクスコントロール装置(VDC装置)等の車載制御装置の車両安定化の影響度合いを予め評価した評価値α1を用いて総合存在確率Pを設定する。
【0056】
例えば、ABS装置では評価値α1=0.1、VDC装置では評価値α1=0.2と設定しておき、以下の(14)式に示すように、存在確率Psを評価値α1で重み付けして可変させ、総合存在確率Pとして設定する。
P=Ps×(1−α1)…(14)
【0057】
これにより、ABS装置やVDC装置による車両挙動の安定化を期待できる場合には、存在確率Psによる回避動作や警報動作の作動タイミングを遅らせて設定することが可能となり、不必要な制御を抑制して運転者との過干渉を防止することができる。
【0058】
一方、車両の走行環境を考慮して総合存在確率Pを設定する場合には、以下に示すような、認識センサの検出特性を考慮する。例えば、ステレオカメラ2、ミリ波レーダ3、レーザレーダ4による立体物の検出特性を走行環境との関係で示すと、以下のようになる。ここで、◎,○,△,×は検出精度を示し、◎は良好、○はやや良好、△はやや劣る、×は劣るである。
ミリ波レーダ 画 像 レーザレーダ
速度・距離 ◎ ○ ◎
横位置 ○ ◎ ◎
幅 × ◎ ○
形状 × ◎ ×
夜間 ◎ △ ◎
立体物の汚れ ○ ◎ △
雨・雪 ◎ △ ○
人 △ ◎ ○
【0059】
上述したように、ミリ波レーダ3から出力されるミリ波はレーザ光に比べて細く絞ることが困難であるため、横位置の分解能は、レーザレーダ4に比べて低く、立体物の幅を検出する精度は低いが、天候の影響を受けずに立体物を検出することができる。
【0060】
一方、レーザレーダ4から出射されるレーザ光は細く絞ることが可能で、車幅方向を連続走査することができるため横位置の分解能に優れており、横位置を高精度に検出することができるが、レーザ光が雨滴によって屈折され、或いは反射されるため、ミリ波よりも天候の影響を受け易い。
【0061】
また、ステレオカメラ2は、立体物を光のコントラストで認識するため、横位置、及び形状の分解能は優れているが、夜間、降雨時、降雪時等のコントラストを認識することの困難な走行環境では分解能が低くなる傾向にある。
【0062】
従って、例えば、認識センサとしてステレオカメラ2を用いる場合には、画像認識やワイパ操作等から周囲環境を推定し、雨・霧中の走行環境では評価値α2=0.1、降雪時の走行環境では評価値α2=0.2、両方の走行環境では評価値α2=0.1+0.2=0.3といったように可変設定する。
【0063】
その他、ミリ波レーダ3やレーザレーダ4を用いる場合も同様であり、走行環境に応じて評価値α2を可変設定する。そして、以下の(15)式に示すように、存在確率Psを評価値α2で重み付けして可変させ、総合存在確率Pとして設定する。
P=Ps×(1+α2)…(15)
【0064】
これにより、車両が不安定になりやすい状況では、制御のタイミングを早めることが可能となり、適切な制御タイミングにより制御信頼性を向上し、車両の安定化を図ることができる。
【図面の簡単な説明】
【0065】
【図1】本発明の実施の第1形態に係り、立体物認識装置のブロック図
【図2】同上、総合存在確率設定処理のフローチャート
【図3】同上、認識センサによる立体物の存在確率算出処理を示すフローチャート
【図4】同上、判定対象とする立体物の統計的な位置の推移を示す説明図
【図5】同上、存在確率の説明図
【図6】本発明の実施の第2形態に係り、立体物認識部のブロック図
【符号の説明】
【0066】
1 立体物認識装置
2 ステレオカメラ
3 ミリ波レーダト
4 レーザレーダ
11 画像立体物存在確率算出部
12 ミリ波立体物存在確率算出部
13 レーザ立体物存在確率算出部
14 存在確率補正部
15 総合存在確率設定部
16 存在確率算出部
17 総合存在確率設定部
Ki,Kl,Km 認識率
P 総合存在確率
Pi,Pm,Pl 存在確率(補正後の存在確率)
Pis,Pms,Pls 存在確率
α,β,γ 信頼度
α1,α2 評価値
【技術分野】
【0001】
本発明は、自車両周辺の状況を検出するセンサの出力値に基づいて自車両周辺に存在する立体物を認識する立体物認識装置に関する。
【背景技術】
【0002】
近年、自動車等の車両においては、車両に搭載したカメラやミリ波レーダ・レーザレーダ等により車外環境を検出して走行方向に存在する立体物を認識する技術が開発され、衝突回避制御等の車両制御に適用されている。
【0003】
このような立体物の認識技術においては、一般に、カメラやミリ波レーダ・レーザレーダ等を代表とする認識センサが用いられているが、これらの認識センサは、走行環境によって検出精度にばらつきが生じるという問題がある。このため、最近では、カメラやミリ波レーダ・レーザレーダレーダ等の複数のセンサを車両に搭載し、各センサで検出した結果を組み合わせて前方立体物を認識するセンサフュージョンと呼ばれる手法が提案されている。
【0004】
例えば、特許文献1には、ミリ波レーダとカメラを含む画像認識装置で検出した各データに基づき、この各データの確かさを示す確率分布を求め、同じデータ値に関する複数の確率分布の積を取ることによってデータをフュージョンし、最も高い確率を示すデータ値に基づいて前方立体物の種別を調べる技術が開示されている。
【0005】
特許文献1に開示されている技術によれば、ある前方認識手段で検出したデータに基づいて求めた確率分布の確率が低下した場合であっても、他の前方認識手段で検出したデータに基づいて求めた確率分布が高い確率を示していれば、この高い確率のデータ値を用いて前方立体物の種別を認識することができる。
【特許文献1】特開2005−165421号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示されているように、単に確率分布の高さで立体物を判断するのみでは、周辺状況を検出するセンサの特性、制御装置による車両安定化の影響度や走行環境等の不確定要因により、立体物と自車両との接触(衝突)に対する回避制御や警報制御等の作動タイミングが早すぎる或いは遅すぎる事態が発生し、必ずしも適切な制御タイミングとならない虞がある。
【0007】
本発明は上記事情に鑑みてなされたもので、周辺状況を検出するセンサの特性、制御装置による車両安定化の影響度、走行環境等の不確定要因に対して、立体物の認識結果に基づく制御を適切なタイミングで実行可能とする立体物認識装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明による第1の立体物認識装置は、自車両周辺の状況を検出するセンサの出力値に基づいて自車両周辺に存在する立体物を認識する立体物認識装置において、上記立体物の存在確率を、上記センサの出力値の真値を中心とする正規分布に基づいて算出する存在確率算出手段と、上記正規分布による存在確率を、上記センサの認識率に基づいて補正する存在確率補正手段と、複数の上記センサに対して上記認識率で補正した存在確率をフュージョンし、総合存在確率として設定する総合存在確率設定手段とを備えたことを特徴とする。
【0009】
本発明による第2の立体物認識装置は、自車両周辺の状況を検出するセンサの出力値に基づいて自車両周辺に存在する立体物を認識する立体物認識装置において、上記立体物の存在確率を、上記センサの出力値の真値を中心とする正規分布に基づいて算出する存在確率算出手段と、上記立体物の存在確率を車載制御装置の車両安定化への影響度に応じて重み付け可変し、総合存在確率として設定する総合存在確率算出手段とを備えたことを特徴とする。
【0010】
本発明による第3の立体物認識装置は、自車両周辺の状況を検出するセンサの出力値に基づいて自車両周辺に存在する立体物を認識する立体物認識装置において、上記立体物の存在確率を、上記センサの出力値の真値を中心とする正規分布に基づいて算出する存在確率算出手段と、上記立体物の存在確率を車両の走行環境に応じて重み付け可変し、総合存在確率として設定する総合存在確率算出手段とを備えたことを特徴とする。
【発明の効果】
【0011】
本発明による立体物認識装置は、周辺状況を検出するセンサの特性、制御装置による車両安定化の影響度、走行環境等の不確定要因に対して、立体物の認識結果に基づく制御を適切なタイミングで実行可能とすることができる。
【発明を実施するための最良の形態】
【0012】
以下、図面を参照して本発明の実施の形態を説明する。図1〜図5は本発明の実施の第1形態に係り、図1は立体物認識装置のブロック図、図2は総合存在確率設定処理のフローチャート、図3は認識センサによる立体物の存在確率算出処理を示すフローチャート、図4は判定対象とする立体物の統計的な位置の推移を示す説明図、図5は存在確率の説明図である。
【0013】
図1において、符号1は、自動車等の車両に搭載され、外界状況を検出する認識センサからの信号を処理して立体物を認識する立体物認識装置であり、立体物の認識結果を図示しない車両制御装置に出力し、立体物と自車との接触(衝突)に対する警報制御や回避制御等を実行させる。本形態においては、ステレオカメラ2、ミリ波レーダト3、レーザレーダ4の異なる検出特性を有する3種類の認識センサを車両に搭載し、各認識センサの出力に基づいて認識される立体物の存在確率を統合して高精度に立体物を認識する例について説明する。
【0014】
立体物認識装置1には、ステレオカメラ2で撮像した撮像信号を処理するステレオ画像処理部5、ミリ波レーダ3からの信号を処理するミリ波信号処理部6、レーザレーダ4からの信号を処理するレーザ信号処理部7が備えられ、各処理部5〜7で、それぞれ、画像、ミリ波信号、レーザ信号に基づいて立体物が抽出される。これらの処理部5〜7で抽出した立体物の情報は、立体物認識部10に送られ、各認識センサからの信号に基づく立体物を統合した総合存在確率で立体物が認識される。
【0015】
ステレオカメラ2は、固体撮像素子を搭載する左右一対のカメラ(CCDカメラやCMOSカメラ)を所定の基線長で配設して構成され、車外風景を異なる視点からステレオ撮像する。このステレオカメラ2は、例えば、車室内のルームミラー上方に取り付けられ、車外風景をステレオ撮像した画像をステレオ画像処理部5に出力する。
【0016】
ステレオ画像処理部5は、ステレオカメラ2で撮像したステレオ画像に基づき、検出した立体物(以下、「画像立体物」と称する)の位置のずれ量から三角測量の原理によって距離データを生成し、この距離データに基づいて、周知のグルーピング処理や予め記憶しておいた立体物データと比較し、車両や歩行者等の立体物を抽出する。そして、画像立体物を特定する特徴量(画像特徴量)として、例えば、車両を原点とする車体前後方向の距離座標値、車幅方向の位置座標値、相対速度(距離座標の時間的変化)等を算出する。
【0017】
また、ミリ波レーダ3は、例えば、車両前端部の車幅方向略中央に取付けられ、複数本のミリ波のビームを放射状に出射する。すなわち、ミリ波レーダ3から出射されるミリ波は、レーザレーダ4のレーザ光に比べて細く絞ることが困難であるため、複数本のミリ波のビームを放射状に出射して立体物からの反射波を受波することにより、立体物を検出する。
【0018】
ミリ波信号処理部6は、ミリ波レーダ3からの検出信号に基づき立体物(以下、「ミリ波立体物」と称する)を特定する特徴量(ミリ波特徴量)を求める。例えば、ミリ波特徴量として、ミリ波レーダ3によるミリ波の送信から受信までの時間に基づいて、車体前後方向の距離座標値を求め、複数本のビームのうちで反射波が受波されたビームの送信方向に基づいて、車幅方向の位置座標値を求める。更に、ドップラー原理に基づいて、距離座標値の変化から相対速度を求める。
【0019】
一方、レーザレーダ4は、細く絞ったレーザ光を出射可能であり、細幅のレーザ光を所定の視野角で走査しながらパルス照射し、立体物からの反射光を受光する。このレーザレーダ4は、ミリ波レーダ3とほぼ同じ位置に取付けられ、例えば、車両の前方に送信した細幅のレーザ光を車幅方向(或いは車幅方向と高さ方向)に所定の視野角を有して走査しながらパルス照射する。
【0020】
レーザ信号処理部7は、レーザレーダ4からの検出信号に基づき立体物(以下、「レーザ立体物」と称する)を特定する特徴量(レーザ特徴量)を求める。例えば、レーザ特徴量として、レーザレーダ4によるレーザ光の送光から受光までの時間に基づいて、車体前後方向の距離座標値を求め、反射光が受光されたときのレーザ光の送光方向に基づいて、車幅方向の位置座標値を求め、更に距離座標値の時間的変化から相対速度を求める。
【0021】
尚、上述した各処理部5〜7で検出される各立体物の特徴量を表す座標系は、基準となる座標系(例えば、画像立体物を認識する座標系)に整合されて設定されている。
【0022】
以上の各処理部5〜7で抽出された立体物のデータは、立体物認識部10に転送される。立体物認識部10には、画像に基づいて検出された画像立体物の存在確率を算出する画像立体物存在確率算出部11、ミリ波に基づいて検出されたミリ波立体物の存在確率を算出するミリ波立体物存在確率算出部12、レーザ光に基づいて検出されたレーザ立体物の存在確率を算出するレーザ立体物存在確率算出部13が備えられ、個々の認識センサ毎に存在確率が算出される。
【0023】
尚、後述するように、本形態においては、画像立体物、ミリ波立体物、レーザ立体物のそれぞれの存在確率は、基本的に同様のアルゴリズムを用いて算出される。
【0024】
また、立体物認識部10には、存在確率補正部14と総合存在確率設定部15とが備えられている。存在確率補正部14は、各認識センサ毎の存在確率を各認識センサの特性に基づいて補正し、この補正された存在確率を総合存在確率設定部15に送る。総合存在確率設定部15は、各認識センサをセンサフュージョンした立体物の認識結果としての総合存在確率を設定する。
【0025】
詳細には、各認識センサ毎の存在確率、各存在確率の補正、及び総合存在確率の設定は、図2,図3のフローチャートに示すプログラム処理を経て算出される。以下、これらの処理について、図2,図3のフローチャートを用いて説明する。
【0026】
図2のフローチャートは、総合存在確率設定処理を示しており、先ず、ステップS1でステレオ画像処理部5の機能として、ステレオカメラ2で撮像したステレオ画像を読込んで画像立体物を抽出し、その位置座標や相対速度等の特徴量を算出する。次いで、ステップS2へ進み、画像立体物の存在確率Pisを算出する。
【0027】
続くステップS3は、ミリ波信号処理部6の機能として、ミリ波レーダ3で検出したミリ波信号を読み込んでミリ波立体物の位置座標や相対速度等を算出し、ステップS4でミリ波立体物の存在確率Pmsを算出する。
【0028】
更に、ステップS5へ進み、レーザ信号処理部7の機能として、レーザレーダ4からのレーザ信号を読み込み、読み込んだレーザ信号からレーザ立体物の位置座標や相対速度等を算出する。そして、ステップS6で、レーザ立体物の存在確率Plsを算出する。
【0029】
次に、ステップS7へ進み、存在確率補正部14の機能として、画像立体物、ミリ波立体物、レーザ立体物のそれぞれの存在確率Pis,Pms,Plsを、各認識センサの特性に基づいて補正する。この補正は、センサの認識理論値を基本として、実験或いはシミュレーションにより最適な補正値を設定するものであり、各認識センサの認識率は、センサ固有の検出特性に依存するパラメータ、例えば、物体の検出が一時的に不能となるロスト率、物体を正しく検出できる正認識率、物体の検出を誤る誤認識率等を用いる。
【0030】
そして、以下の(1)〜(3)式に示すように、ステレオカメラ2、ミリ波レーダ3、レーザレーダ4に基づいて算出されるそれぞれの存在確率Pis,Pms,Plsを、ステレオカメラ2の認識率Ki、ミリ波レーダ3の認識率Km、レーザレーダ4の認識率Klを用いて補正し、補正後の存在確率Pi,Pm,Plを得る。
Pi=Pis×Ki…(1)
Pm=Pms×Km…(2)
Pl=Pls×Kl…(3)
【0031】
その後、ステップS8へ進み、総合存在確率設定部15の機能として、ステレオカメラ2による存在確率Pi、ミリ波レーダ3による存在確率Pm、レーザレーダ4による存在確率Plを統括し、以下の(4)式により、センサフュージョンによる立体物の総合存在確率Pとして設定する。
P=1−(1−Pi)×(1−Pm)×(1−Pl)…(4)
【0032】
以上の処理で算出された総合存在確率Pは、その値の大きさに応じて、そのままの状態維持、障害物情報表示、警報制御、自動ブレーキ制御等の実行に適用される。この場合、(4)式による総合存在確率Pは、画像立体物の非存在確率(1−Pi)、ミリ波立体物の非存在確率(1−Pm)、レーザ立体物の非存在確率(1−Pl)に基づいて設定されるものであり、立体物を認識していないセンサがある場合、例えば、画像がロストしている場合には、ミリ波とレーザとによる存在確率が設定される。
【0033】
これにより、障害物への接触回避や警報等の制御の作動タイミングを、存在確率が高いときには早く、低いときには遅くすることができ、確実且つ最適なタイミングでの制御を可能とすることができる。更には、検出信頼度が低い障害物への誤制御を回避することができる。
【0034】
尚、上述の(4)式による総合存在確率Pに代えて、各認識センサの信頼度を考慮して総合存在確率Pを設定するようにしても良い。すなわち、ミリ波レーダ3の信頼度をα、レーザレーダ4の信頼度をβ、ステレオカメラ2の信頼度をγとする場合、以下の(5)式により、総合存在確率Pを設定する。
P=(Pm×α)+(Pl×β)+(Pi×γ)…(5)
但し、(5)式において、α+β+γ=1であり、各認識センサの信頼度α,β,γは、ミリ波、レーザ、画像の順に信頼度が高いものとして、例えば、α:β:γ=5:3:2の比率に設定される。
【0035】
(5)式による総合存在確率Pでは、ステレオカメラ2、ミリ波レーダ3、レーザレーダ4の何れかのセンサが不検出状態になった場合、該当センサによる立体物の存在確率を0とおけば良く、同様に、制御の作動タイミングを、存在確率が高いときには早く、低いときには遅くすることができ、確実且つ最適なタイミングでの制御を可能にすると共に、検出信頼度が低い障害物への誤制御を回避することができる。
【0036】
次に、各認識センサによる存在確率の算出処理について説明する。本形態においては、画像立体物、ミリ波立体物、レーザ立体物のそれぞれの存在確率は、基本的に同様の演算アルゴリズムを用いて算出される。この存在確率の演算アルゴリズムは、概略的には、判定対象とする立体物の挙動を考慮した確率分布の演算を行うものであり、ここでは、各認識センサによる存在確率の算出処理を図3の存在確率算出処理で代表し、各認識センサによる存在確率Pis,Pms,Plsを存在確率Rで代表して説明する。
【0037】
この存在確率算出処理では、先ず、ステップS101で、演算に必要な情報(例えば、画像情報や自車両の車速V0等)の読み込みを行う。次に、ステップS102へ進み、判定対象とする立体物(例えば、自車両の進行路上にある最も近い立体物)を抽出し、この立体物までの距離x、立体物の前後方向速度Vx(距離xの微分値+自車速V0)、立体物の前後方向加速度ax(前後方向速度Vxの微分値)等の各データを取得する。
【0038】
次いで、ステップS103に進み、判定対象とする立体物までの距離x、前後方向速度Vx(距離xの微分値+自車速V0)、前後方向加速度ax(前後方向速度Vxの微分値)等の各データを基に、これらの各データが真値(本形態においては平均値)を中心に、車両の前後方向を軸(x軸)とする正規分布で出力されていると仮定し、以下の(7)〜(9)式により、現在の前後方向加速度ax(0)、現在の前後方向速度Vx(0)、現在の前後方向位置x(0)を統計処理にて演算する。
【0039】
尚、以下の正規分布において、−∞<x<∞であり、正規分布の分散は正の値である。また、以下の前後方向加速度、前後方向速度、前後方向位置の統計演算においては、正規分布の平均値μ,分散σ2による(6)式の確率密度関数rを適用する。
r=(1/((2・π)1/2・σ))・exp(−(x−μ)2/(2・σ2))…(6)
【0040】
すなわち、現在の前後方向加速度ax(0)は、現在の前後方向加速度の平均値ax(0)aと、現在の前後方向加速度の偏差σax(0)で示される分散σax(0)2を有する正規分布として、以下の(7)式に示すように、ax(ax(0)a,σax(0)2)で演算される。
ax(0)=ax(ax(0)a,σax(0)2)
=(1/((2・π)1/2・σax(0)))・exp(−(x−ax(0)a)2/(2・σax(0)2))…(7)
【0041】
また、現在の前後方向速度Vx(0)は、現在の前後方向速度の平均値Vx(0)aと、現在の前後方向速度の偏差σvx(0)で示される分散σvx(0)2を有する正規分布として、以下の(8)式に示すように、Vx(Vx(0)a,σvx(0)2)で演算される。
Vx(0)=Vx(Vx(0)a,σvx(0)2)
=(1/((2・π)1/2・σvx(0)))・exp(−(x−Vx(0)a)2/(2・σvx(0)2))…(8)
【0042】
更に、現在の前後方向位置x(0)は、現在の前後方向位置の平均値x(0)aと、現在の前後方向位置の偏差σx(0)で示される分散σx(0)2を有する正規分布として、以下の(9)式に示すように、x(x(0)a,σx(0)2)で演算される。
x(0)=x(x(0)a,σx(0)2)
=(1/((2・π)1/2・σx(0)))・exp(−(x−x(0)a)2/(2・σx(0)2))…(9)
【0043】
尚、上述の各分散σax(0)2,σvx(0)2,σx(0)2は、認識センサや認識対象物によって予め設定しておいた値であり、ステレオカメラ2による認識に比較し、ミリ波レーダ3やレーザレーダ4による認識では、速度精度が高いので分散は小さく設定することができる。
【0044】
次に、ステップS104に進み、判定対象とする立体物の現在の前後方向加速度ax(0)、前後方向速度Vx(0)、前後方向位置x(0)に基づいて、Δt秒後(例えば、0.5秒後)の前後方向加速度ax(Δt)、前後方向速度Vx(Δt)、前後方向位置x(Δt)を、以下の(10)〜(12)式により統計処理にて演算する。
【0045】
すなわち、Δt秒後の前後方向加速度ax(Δt)は、Δt秒後の前後方向加速度の平均値ax(Δt)aと、Δt秒後の前後方向加速度の偏差σax(Δt)で示される分散σax(Δt)2を有する正規分布として、ax(ax(Δt)a,σax(Δt)2)で演算される。尚、本形態においては、等加速度運動と仮定して求めるものとする。
ax(Δt)=ax(ax(Δt)a,σax(Δt)2)
=ax(ax(0)a,σax(0)2)…(10)
【0046】
また、Δt秒後の前後方向速度Vx(Δt)は、Δt秒後の前後方向速度の平均値Vx(Δt)aと、Δt秒後の前後方向速度の偏差σvx(Δt)で示される分散σvx(Δt)2を有する正規分布として、Vx(Vx(Δt)a,σvx(Δt)2)で演算される。この際、現在の前後方向加速度ax(0)、前後方向速度Vx(0)を用いて、以下の(11)式の通り演算する。
Vx(Δt)=Vx(Vx(Δt)a,σvx(Δt)2)
=Vx(Vx(0)a,σvx(0)2)+ax(ax(0)a,σax(0)2)・Δt
=Vx(Vx(0)a+ax(0)a・Δt,(σvx(0)+σax(0)・Δt)2)…(11)
【0047】
更に、Δt秒後の前後方向位置x(Δt)は、Δt秒後の前後方向位置の平均値x(Δt)aと、Δt秒後の前後方向位置の偏差σx(Δt)で示される分散σx(Δt)2を有する正規分布として、x(x(Δt)a,σx(Δt)2)で演算される。この際、現在の前後方向加速度ax(0)、前後方向速度Vx(0)、前後方向位置x(0)を用いて、以下の(12)式の通り演算する。
x(Δt)=x(x(Δt)a,σx(Δt)2)
=x(x(0)a,σx(0)2)+Vx(Vx(0)a,σvx(0)2)・Δt+(1/2)・ax(ax(0)a,σax(0)2)・Δt2
=x(x(0)a+Vx(0)a・Δt+(1/2)・ax(0)a・Δt2,(σx(0)+σvx(0)・Δt+(1/2)・σax(0)・Δt2)2)…(12)
【0048】
その後、ステップS105へ進み、判定対象とする立体物のΔt秒後の前後方向位置x(Δt)を基に、以下の(13)式により、Δt秒後の立体物の存在確率R(Δt)を演算する。
R(Δt)=∫(x(x(Δt)a,σx(Δt)2))dx…(13)
(但し、積分範囲は、−∞<x<0)
【0049】
すなわち、判定対象とする立体物の現在の前後方向位置x(0)が正規分布で示されるとすると、Δt/2秒後の前後方向位置x(Δt/2)、Δt秒後の前後方向位置x(Δt)は、図4に示すような位置になると推定される。従って、前後方向位置に関する正規分布の確率密度関数をリスクを評価するリスク関数rxとして導入し、図5に示すように、自車両の位置をx軸上の0と仮定して積分し(積分範囲:−∞<x<0)、その面積(t秒後のリスク関数rxの値)を存在確率R(Δt)として演算するのである。
【0050】
尚、判定対象とする立体物のΔt秒後の前後方向位置x(Δt)は、正規分布の関数であるため、−∞<x<∞における積分の結果は、1.0である。
【0051】
これにより、自車両と立体物との接触(衝突)の危険性等のリスク分布を連続的に把握することができ、信頼度の低い情報に基づく誤制御を防止し、予防安全性を向上することができる。
【0052】
次に、本発明の実施の第2形態について説明する。図6は、本発明の実施の第2形態に係り、立体物認識部のブロック図である。
【0053】
第2形態は、立体物の存在確率を、認識センサ以外の要因に応じて重み付け可変するものであり、その要因として、車両制御装置側の車両安定化への影響度や車両の走行環境を考慮する。
【0054】
第2形態においては、認識センサとして、ステレオカメラ2、ミリ波レーダト3、レーザレーダ4の少なくとも1つのセンサを有する場合にも適用可能であり、図6に示すように、第1形態の立体物認識部10を、存在確率算出部16と総合存在確率設定部17とを有する立体物認識部10Aとする。この場合、存在確率算出部16で算出する存在確率Psは、画像立体物の存在確率Pis、ミリ波立体物の存在確率Pms、レーザ立体物の存在確率Plsを代表するものとする。存在確率Psの演算アルゴリズムは、第1形態と同様である。
【0055】
総合存在確率設定部17では、車両制御装置側の車両安定化への影響度を考慮する場合、アンチロックブレーキ制御装置(ABS装置)やビークルダイナミクスコントロール装置(VDC装置)等の車載制御装置の車両安定化の影響度合いを予め評価した評価値α1を用いて総合存在確率Pを設定する。
【0056】
例えば、ABS装置では評価値α1=0.1、VDC装置では評価値α1=0.2と設定しておき、以下の(14)式に示すように、存在確率Psを評価値α1で重み付けして可変させ、総合存在確率Pとして設定する。
P=Ps×(1−α1)…(14)
【0057】
これにより、ABS装置やVDC装置による車両挙動の安定化を期待できる場合には、存在確率Psによる回避動作や警報動作の作動タイミングを遅らせて設定することが可能となり、不必要な制御を抑制して運転者との過干渉を防止することができる。
【0058】
一方、車両の走行環境を考慮して総合存在確率Pを設定する場合には、以下に示すような、認識センサの検出特性を考慮する。例えば、ステレオカメラ2、ミリ波レーダ3、レーザレーダ4による立体物の検出特性を走行環境との関係で示すと、以下のようになる。ここで、◎,○,△,×は検出精度を示し、◎は良好、○はやや良好、△はやや劣る、×は劣るである。
ミリ波レーダ 画 像 レーザレーダ
速度・距離 ◎ ○ ◎
横位置 ○ ◎ ◎
幅 × ◎ ○
形状 × ◎ ×
夜間 ◎ △ ◎
立体物の汚れ ○ ◎ △
雨・雪 ◎ △ ○
人 △ ◎ ○
【0059】
上述したように、ミリ波レーダ3から出力されるミリ波はレーザ光に比べて細く絞ることが困難であるため、横位置の分解能は、レーザレーダ4に比べて低く、立体物の幅を検出する精度は低いが、天候の影響を受けずに立体物を検出することができる。
【0060】
一方、レーザレーダ4から出射されるレーザ光は細く絞ることが可能で、車幅方向を連続走査することができるため横位置の分解能に優れており、横位置を高精度に検出することができるが、レーザ光が雨滴によって屈折され、或いは反射されるため、ミリ波よりも天候の影響を受け易い。
【0061】
また、ステレオカメラ2は、立体物を光のコントラストで認識するため、横位置、及び形状の分解能は優れているが、夜間、降雨時、降雪時等のコントラストを認識することの困難な走行環境では分解能が低くなる傾向にある。
【0062】
従って、例えば、認識センサとしてステレオカメラ2を用いる場合には、画像認識やワイパ操作等から周囲環境を推定し、雨・霧中の走行環境では評価値α2=0.1、降雪時の走行環境では評価値α2=0.2、両方の走行環境では評価値α2=0.1+0.2=0.3といったように可変設定する。
【0063】
その他、ミリ波レーダ3やレーザレーダ4を用いる場合も同様であり、走行環境に応じて評価値α2を可変設定する。そして、以下の(15)式に示すように、存在確率Psを評価値α2で重み付けして可変させ、総合存在確率Pとして設定する。
P=Ps×(1+α2)…(15)
【0064】
これにより、車両が不安定になりやすい状況では、制御のタイミングを早めることが可能となり、適切な制御タイミングにより制御信頼性を向上し、車両の安定化を図ることができる。
【図面の簡単な説明】
【0065】
【図1】本発明の実施の第1形態に係り、立体物認識装置のブロック図
【図2】同上、総合存在確率設定処理のフローチャート
【図3】同上、認識センサによる立体物の存在確率算出処理を示すフローチャート
【図4】同上、判定対象とする立体物の統計的な位置の推移を示す説明図
【図5】同上、存在確率の説明図
【図6】本発明の実施の第2形態に係り、立体物認識部のブロック図
【符号の説明】
【0066】
1 立体物認識装置
2 ステレオカメラ
3 ミリ波レーダト
4 レーザレーダ
11 画像立体物存在確率算出部
12 ミリ波立体物存在確率算出部
13 レーザ立体物存在確率算出部
14 存在確率補正部
15 総合存在確率設定部
16 存在確率算出部
17 総合存在確率設定部
Ki,Kl,Km 認識率
P 総合存在確率
Pi,Pm,Pl 存在確率(補正後の存在確率)
Pis,Pms,Pls 存在確率
α,β,γ 信頼度
α1,α2 評価値
【特許請求の範囲】
【請求項1】
自車両周辺の状況を検出するセンサの出力値に基づいて自車両周辺に存在する立体物を認識する立体物認識装置において、
上記立体物の存在確率を、上記センサの出力値の真値を中心とする正規分布に基づいて算出する存在確率算出手段と、
上記正規分布による存在確率を、上記センサの認識率に基づいて補正する存在確率補正手段と、
複数の上記センサに対して上記認識率で補正した存在確率をフュージョンし、総合存在確率として設定する総合存在確率設定手段と
を備えたことを特徴とする立体物認識装置。
【請求項2】
上記総合存在確率を、上記立体物の非存在確率に基づいて設定することを特徴とする請求項1記載の立体物認識装置。
【請求項3】
上記総合存在確率を、上記センサの信頼度に基づいて設定することを特徴とする請求項1記載の立体物認識装置。
【請求項4】
自車両周辺の状況を検出するセンサの出力値に基づいて自車両周辺に存在する立体物を認識する立体物認識装置において、
上記立体物の存在確率を、上記センサの出力値の真値を中心とする正規分布に基づいて算出する存在確率算出手段と、
上記立体物の存在確率を車載制御装置の車両安定化への影響度に応じて重み付け可変し、総合存在確率として設定する総合存在確率算出手段と
を備えたことを特徴とする立体物認識装置。
【請求項5】
自車両周辺の状況を検出するセンサの出力値に基づいて自車両周辺に存在する立体物を認識する立体物認識装置において、
上記立体物の存在確率を、上記センサの出力値の真値を中心とする正規分布に基づいて算出する存在確率算出手段と、
上記立体物の存在確率を車両の走行環境に応じて重み付け可変し、総合存在確率として設定する総合存在確率算出手段と
を備えたことを特徴とする立体物認識装置。
【請求項6】
上記立体物の存在確率を、上記立体物の現在の運動及び位置状態から推定した設定時間後の確率分布として算出することを特徴とする請求項1〜5の何れかに記載の立体物認識装置。
【請求項1】
自車両周辺の状況を検出するセンサの出力値に基づいて自車両周辺に存在する立体物を認識する立体物認識装置において、
上記立体物の存在確率を、上記センサの出力値の真値を中心とする正規分布に基づいて算出する存在確率算出手段と、
上記正規分布による存在確率を、上記センサの認識率に基づいて補正する存在確率補正手段と、
複数の上記センサに対して上記認識率で補正した存在確率をフュージョンし、総合存在確率として設定する総合存在確率設定手段と
を備えたことを特徴とする立体物認識装置。
【請求項2】
上記総合存在確率を、上記立体物の非存在確率に基づいて設定することを特徴とする請求項1記載の立体物認識装置。
【請求項3】
上記総合存在確率を、上記センサの信頼度に基づいて設定することを特徴とする請求項1記載の立体物認識装置。
【請求項4】
自車両周辺の状況を検出するセンサの出力値に基づいて自車両周辺に存在する立体物を認識する立体物認識装置において、
上記立体物の存在確率を、上記センサの出力値の真値を中心とする正規分布に基づいて算出する存在確率算出手段と、
上記立体物の存在確率を車載制御装置の車両安定化への影響度に応じて重み付け可変し、総合存在確率として設定する総合存在確率算出手段と
を備えたことを特徴とする立体物認識装置。
【請求項5】
自車両周辺の状況を検出するセンサの出力値に基づいて自車両周辺に存在する立体物を認識する立体物認識装置において、
上記立体物の存在確率を、上記センサの出力値の真値を中心とする正規分布に基づいて算出する存在確率算出手段と、
上記立体物の存在確率を車両の走行環境に応じて重み付け可変し、総合存在確率として設定する総合存在確率算出手段と
を備えたことを特徴とする立体物認識装置。
【請求項6】
上記立体物の存在確率を、上記立体物の現在の運動及び位置状態から推定した設定時間後の確率分布として算出することを特徴とする請求項1〜5の何れかに記載の立体物認識装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2007−310741(P2007−310741A)
【公開日】平成19年11月29日(2007.11.29)
【国際特許分類】
【出願番号】特願2006−140755(P2006−140755)
【出願日】平成18年5月19日(2006.5.19)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
【公開日】平成19年11月29日(2007.11.29)
【国際特許分類】
【出願日】平成18年5月19日(2006.5.19)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
[ Back to top ]