
立体画像表示装置、立体画像表示制御装置、立体画像表示方法、及び、プログラム
【課題】立体画像をより立体的に見せる立体画像表示装置、立体画像表示制御装置、立体画像表示方法及びプログラムを提供する。
【解決手段】立体画像表示装置1は、表示部14と、合成画像を解析する解析部10と、解析部10による解析情報に基づいて、合成画像の立体視効果が増大するように、表示部14による表示を制御する表示制御部12とを備える。解析部10は、単眼性手がかりが存在する合成画像について、両眼性手がかり又は単眼性手がかりの少なくとも一方を解析し、単眼性手がかりが存在しない合成画像について、両眼性手がかりを解析する。表示制御部12は、単眼性手がかりが存在する合成画像について、合成画像における単眼性手がかりが強調されるように表示部14による表示を制御し、単眼性手がかりが存在しない合成画像について、合成画像に単眼性手がかりが付加されるように表示部14による表示を制御する。
【解決手段】立体画像表示装置1は、表示部14と、合成画像を解析する解析部10と、解析部10による解析情報に基づいて、合成画像の立体視効果が増大するように、表示部14による表示を制御する表示制御部12とを備える。解析部10は、単眼性手がかりが存在する合成画像について、両眼性手がかり又は単眼性手がかりの少なくとも一方を解析し、単眼性手がかりが存在しない合成画像について、両眼性手がかりを解析する。表示制御部12は、単眼性手がかりが存在する合成画像について、合成画像における単眼性手がかりが強調されるように表示部14による表示を制御し、単眼性手がかりが存在しない合成画像について、合成画像に単眼性手がかりが付加されるように表示部14による表示を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、立体画像表示装置、立体画像表示制御装置、立体画像表示方法、及び、プログラムに関するものである。
【背景技術】
【0002】
従来、左目用画像と右目用画像を利用して画像を立体的に表示する技術が開示されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−119066号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、立体視に好適な表示装置はなく、既存の液晶パネルをベースとしたものしか存在していない。つまり、立体視を実現するために、例えば、液晶パネル表面にバリアを配置した液晶パネル、或いは、液晶シャッターを配置した液晶パネルは存在するものの、立体画像をより効果的に見せる液晶パネルは存在していないという問題がある。
【0005】
本発明はこのような事情に鑑みてなされたものであって、立体画像をより立体的に見せる立体画像表示装置、立体画像表示制御装置、立体画像表示方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記問題を解決するために、本発明の一態様である立体画像表示装置は、立体視効果を利用して画像を立体的に表示する表示部と、左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析する解析部と、前記解析部による解析情報に基づいて、前記合成画像における単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御する表示制御部とを備えることを特徴とする。
上記構成によれば、単眼性手がかりが存在する合成画像について、当該合成画像の単眼性手がかりが強調されるように表示部による表示を制御し、単眼性手がかりが存在しない合成画像について、当該合成画像に単眼性手がかりが付加されるように表示部による表示を制御するため、立体画像をより立体的に見せることができるようになる。
【0007】
上記立体画像表示装置において、前記解析部は、前記合成画像の両眼性手がかりを解析するときは、左目用画像及び右目用画像における同一オブジェクトの領域のずれに基づく両眼性手がかりを解析するようにしてもよい。
上記構成によれば、合成画像として元々有している情報を活用し、両眼性手がかりを解析することができるため、効率的に、立体画像をより立体的に見せることができるようになる。
【0008】
上記立体画像表示装置において、前記表示制御部は、前記表示部による表示の制御として、輝度、彩度又は色相の少なくとも1つを変更させる制御情報を前記表示部に出力するようにしてもよい。
上記構成によれば、表示部は、制御情報に従って合成画像を表示するだけであるため、簡便に、立体画像をより立体的に見せることができるようになる。
【0009】
上記立体画像表示装置において、前記制御情報は、ガンマ特性を変更させるものであってもよい。
上記構成によれば、ガンマ特性を変更によって輝度、彩度及び色相を変更することができるため、簡便に、立体画像をより立体的に見せることができるようになる。
【0010】
上記立体画像表示装置において、前記表示制御部は、ライン毎の前記制御情報を前記表示部に出力するようにしてもよい。
上記構成によれば、単眼性手がかりの強調又は付加を表示面のライン毎に行うため、簡便に、立体画像をより立体的に見せることができるようになる。
【0011】
上記立体画像表示装置において、前記表示制御部は、前記合成画像内のオブジェクト毎の前記制御情報を前記表示部に出力するようにしてもよい。
上記構成によれば、単眼性手がかりの強調又は付加を表示するオブジェクト毎に行うため、きめ細かに、立体画像をより立体的に見せることができるようになる。
【0012】
上記問題を解決するために、本発明の一態様である立体画像表示制御装置は、左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析する解析部と、前記解析部による解析情報に基づいて、前記合成画像における単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御する表示制御部とを備えることを特徴とする。
上記構成によれば、上述の立体画像表示装置と同様に効果を得ることができる。
【0013】
上記問題を解決するために、本発明の一態様である立体画像表示方法は、立体視効果を利用して表示部に画像を立体的に表示する立体画像表示装置における立体画像表示方法であって、前記立体画像表示装置の解析手段が、左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析し、前記立体画像表示装置の表示制御手段が、前記解析部による解析情報に基づいて、前記合成画像の単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御することを特徴とする。
上記構成によれば、上述の立体画像表示装置と同様に効果を得ることができる。
【0014】
上記問題を解決するために、本発明の一態様であるプログラムは、立体視効果を利用して表示部に画像を立体的に表示する立体画像表示装置のコンピューターに、左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析する解析ステップと、前記解析ステップによる解析情報に基づいて、前記合成画像における単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御する表示制御ステップとを実行させることを特徴とする。
上記構成によれば、上述の立体画像表示装置と同様に効果を得ることができる。
【図面の簡単な説明】
【0015】
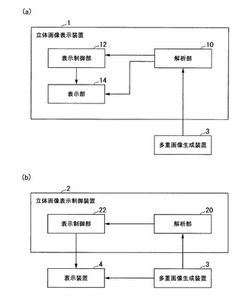
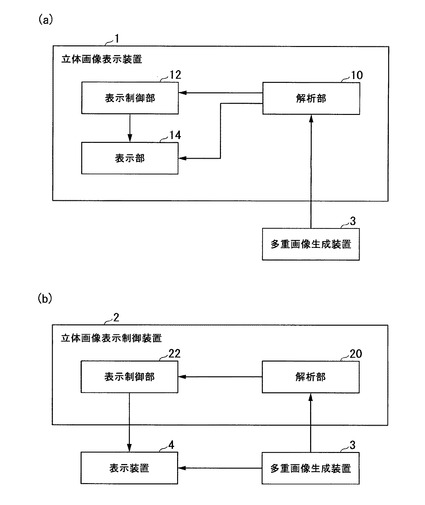
【図1】(a)は、本発明の第1の実施形態に係る立体画像表示装置の機能ブロック図、(b)は、第2の実施形態に係る立体画像表示制御装置の機能ブロック図である。
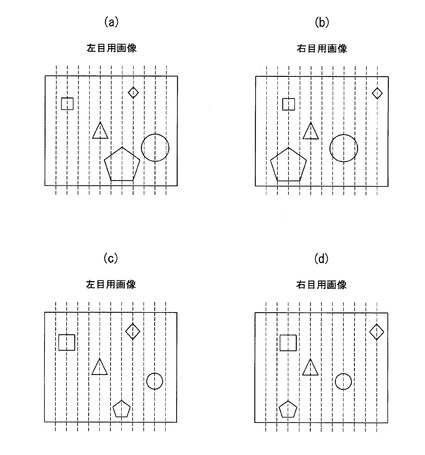
【図2】単眼性手がかりが存在する合成画像と単眼性手がかりが存在しない合成画像の一例であり、(a)は、単眼性手がかりが存在する合成画像における左目用画像の一例、(b)は、単眼性手がかりが存在する合成画像における右目用画像の一例、(c)は、単眼性手がかりが存在しない合成画像における左目用画像の一例、(d)は、単眼性手がかりが存在しない合成画像における右目用画像の一例である。
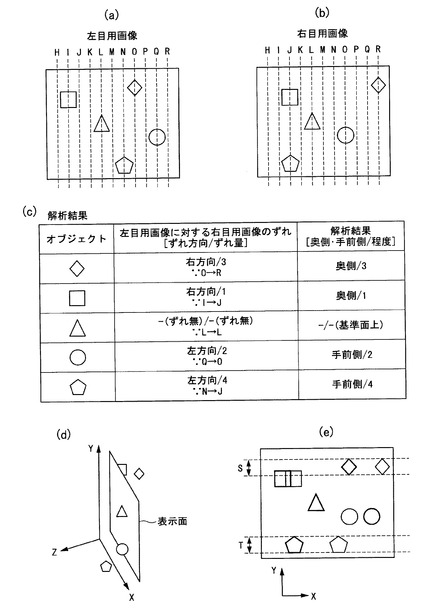
【図3】解析部による両眼性手がかりの解析を説明するための図であり、(a)は、左目用画像の一例、(b)は、右目用画像の一例、(c)は、(a)(b)から得られる解析結果の一例、(d)は、(c)の解析結果に関する模式図、(e)は、ラインの解析の概念図である。
【図4】解析部による単眼性手がかりの解析を説明するための図であり、(a)は、左目用画像の一例、(b)は、右目用画像の一例、(c)は、(a)(b)から得られる解析結果の一例である。
【図5】ガンマ特性の変更例であり、(a)は、最も奥側であると解析された画素に対する赤色信号(R値)のガンマ補正例、(b)は、最も奥側であると解析された画素に対する緑色信号(G値)のガンマ補正例、(c)は、最も奥側であると解析された画素に対する青色信号(B値)のガンマ補正例、(d)は、最も手前側であると解析された画素に対する赤色信号(R値)のガンマ補正例、(e)は、最も手前側であると解析された画素に対する緑色信号(G値)のガンマ補正例、(f)は、最も手前側であると解析された画素に対する青色信号(B値)のガンマ補正例である。
【図6】表示制御部による制御例であり、(a)は、多重画像生成装置から出力された合成画像、(b)〜(d)は、夫々、表示制御部による制御によって表示部に表示された(a)に示す合成画像の表示例である。
【図7】表示制御部による制御例であり、(a)は、夫々、多重画像生成装置から出力された合成画像、(b)は、表示制御部による制御によって表示部に表示された(a)に示す合成画像の表示例である。
【発明を実施するための形態】
【0016】
(第1の実施形態)
以下、本発明の第1の実施形態について図面を参照して詳細に説明する。図1は、本発明の第1の実施形態に係る立体画像表示装置の機能ブロック図、及び、第2の実施形態に係る立体画像表示制御装置の機能ブロック図である。図2は、単眼性手がかりが存在する合成画像と単眼性手がかりが存在しない合成画像の一例である。図3は、解析部による両眼性手がかりの解析を説明するための図である。図4は、解析部による両眼性手がかりの解析を説明するための図である。
【0017】
本発明の第1の実施形態に係る立体画像表示装置1は、立体視効果を利用して画像を立体的に表示する装置である。立体画像表示装置1は、図1(a)に示すように、解析部10、表示制御部12及び表示部14を備える。また、立体画像表示装置1は、多重画像生成装置3と接続している。
【0018】
多重画像生成装置3は、左目用画像及び右目用画像を合成した合成画像を生成する装置である。左目用画像及び右目用画像は、人間の左右の目に対応する視差画像である。従って、多重画像生成装置3が生成する合成画像には、画像の立体視効果を与える要素の1つである、両眼性手がかり(「生理的手がかり」とも称する)が存在する。また、多重画像生成装置3が生成する合成画像を形成する左目用画像及び右目用画像には、画像の立体視効果を与える要素の1つである単眼性手がかり(「絵画的手がかり」とも称する)が存在する場合もある。
【0019】
つまり、立体画像における立体視効果は、両眼性手がかりによるものと、単眼性手がかりによるもととが存在するが、多重画像生成装置3は、両眼性手がかりに加え単眼性手がかりが存在する合成画像も、両眼性手がかりのみが存在し単眼性手がかりが存在しない合成画像も生成することができる。
【0020】
両眼性手がかりに加え単眼性手がかりが存在する合成画像とは、単眼性手がかりを有する左目用画像(例えば図2(a)参照)、及び、右目用画像(例えば図2(b)参照)から合成された合成画像である。図2(a)に示す左目用画像及び図2(b)に示す右目用画像は、単眼性手がかりの一態様(大きいオブジェクトは近く(手前)に感じ、小さいオブジェクトは遠く(奥)に感じるという態様)を有している。
【0021】
一方、両眼性手がかりのみが存在し単眼性手がかりが存在しない合成画像とは、単眼性手がかりを有しない左目用画像(例えば図2(c)参照)、及び、右目用画像(例えば図2(d)参照)から合成された合成画像である。なお、図2において、菱型、四角形、三角形、丸及び五角形はオブジェクト、破線は各オブジェクトの表示領域の左右(後述のX軸方向)の位置を示す補助線である(後述の図3(a)(b)についても同様である)。
【0022】
解析部10は、合成画像を多重画像生成装置3から取得する。解析部10は、合成画像を多重画像生成装置3から取得した場合、当該合成画像を表示部14に出力する。また、解析部10は、多重画像生成装置3から取得した合成画像における両眼性手がかり、又は、単眼性手がかりを解析する。具体的には、解析部10は、単眼性手がかりが存在する合成画像を多重画像生成装置3から取得した場合、当該合成画像の両眼性手がかり又は単眼性手がかりの少なくとも一方を解析し、単眼性手がかりが存在しない合成画像を多重画像生成装置3から取得した場合、当該合成画像の両眼性手がかりを解析する。
なお、解析部10が、単眼性手がかりが存在する合成画像を取得した場合に、両眼性手がかりを解析するか、単眼性手がかりを解析するか、その両方を解析するかは、立体画像表示装置1において、予め設定しておいてもよいし、立体画像表示装置1のユーザーによって選択可能であってもよい。
以下、合成画像における両眼性手がかりの解析、合成画像における単眼性手がかりを解析の夫々について説明する。
【0023】
(合成画像における両眼性手がかりの解析)
解析部10は、左目用画像及び右目用画像における同一オブジェクトの領域のずれ(ずれ方向及びずれ量)に基づく両眼性手がかりを解析する。つまり、解析部10は、両眼性手がかりとして、左目用画像内のあるオブジェクトの領域に対して、右目用画像内の当該オブジェクトの領域がどの程度ずれているかを解析する。例えば、解析部10は、図3(a)に示す左目用画像及び図3(b)に示す右目用画像を合成した合成画像を多重画像生成装置3から取得した場合、当該合成画像における両眼性手がかりとして、図3(c)に示すように、左目用画像内のあるオブジェクトの領域に対して、右目用画像内の当該オブジェクトの領域がどの程度ずれているかを解析する。
【0024】
即ち、図3(a)(b)に示す例において、解析部10は、例えば、菱型のオブジェクトの左目用画像の位置「O」及び菱型のオブジェクトの右目用画像の位置「R」から、左目用画像に対する右目用画像の菱型のオブジェクトのずれ方向「右方向」、及び、ずれ量「3」(説明の便宜上、補助線N本分のずれをずれ量「N」とする)を得る。そして、解析部10は、図3(c)に示すように、菱型のオブジェクトの両眼性手がかりとして、「3」程度(説明の便宜上、ずれ量「N」のずれは「N」程度のずれとする)、基準面(例えば表示部14の表示面)よりも奥側に存在すると解析(判断)する。
【0025】
同様に、解析部10は、四角形のオブジェクトの左目用画像の位置「I」及び四角形のオブジェクトの右目用画像の位置「J」から、左目用画像に対する右目用画像の四角形のオブジェクトのずれ方向「右方向」、及び、ずれ量「1」を得る。そして、解析部10は、図3(c)に示すように、四角形のオブジェクトの両眼性手がかりとして、「1」程度、基準面よりも奥側に存在すると解析する。
【0026】
また例えば、解析部10は、三角形のオブジェクトの左目用画像の位置「L」及び三角形のオブジェクトの右目用画像の位置「L」から、左目用画像に対する右目用画像の三角形のオブジェクトのずれ方向「−(ずれ無)」、及び、ずれ量「−(ずれ無)」を得る。そして、解析部10は、図3(c)に示すように、三角形のオブジェクトの両眼性手がかりとして、基準面上に存在すると解析する。
【0027】
また例えば、解析部10は、丸のオブジェクトの左目用画像の位置「Q」及び丸のオブジェクトの右目用画像の位置「O」から、左目用画像に対する右目用画像の丸のオブジェクトのずれ方向「左方向」、及び、ずれ量「2」を得る。そして、解析部10は、図3(c)に示すように、丸のオブジェクトの両眼性手がかりとして、「2」程度、基準面よりも手前側に存在すると解析する。
【0028】
同様に、解析部10は、五角形のオブジェクトの左目用画像の位置「N」及び五角形のオブジェクトの右目用画像の位置「J」から、左目用画像に対する右目用画像の五角形のオブジェクトのずれ方向「左方向」、及び、ずれ量「4」を得る。そして、解析部10は、図2(c)に示すように、五角形のオブジェクトの単眼性手がかりとして、「4」程度、基準面よりも手前側に存在すると解析する。
【0029】
つまり、図3(d)に示すように、表示部14の表示面をX軸及びY軸、表示部14の表示面に垂直な方向をZ軸(表示画をゼロ、表示面の手前側に飛び出す方向をプラス、表示面の奥側に引っ込む方向をマイナスとする)とするとき、解析部10は、あるオブジェクトについて、左目用画像に対する右目用画像のずれ方向が右方向であるときは、当該オブジェクトのZ座標の値は、そのずれ量に応じた程度、マイナスであると解析し、左目用画像に対する右目用画像のずれ方向が左方向であるときは、当該オブジェクトのZ座標の値は、そのずれ量に応じた程度、プラスであると解析し、左目用画像に対する右目用画像のずれが無いときは、当該オブジェクトのZ座標の値は、ゼロ(無)であると解析する。
【0030】
なお、図3(c)に示す例では、左目用画像に対する右目用画像のずれに着目しているが、反対に、右目用画像に対する左目用画像のずれに着目してもよい。例えば、解析部10は、あるオブジェクトについて、右目用画像に対する左目用画像のずれ方向が右方向であるときは、当該オブジェクトのZ座標の値は、そのずれ量に応じた程度、プラスであると解析し、右目用画像に対する左目用画像のずれ方向が左方向であるときは、当該オブジェクトのZ座標の値は、そのずれ量に応じた程度、マイナスであると解析する。
【0031】
なお、両眼性手がかりとして、各オブジェクトのZ座標の値を解析した解析部10は、両眼性手がかりとして、更に、表示部14のライン(Y座標の値が同じ画素の群)毎のZ座標の値、又は、連続する複数のライン毎のZ座標の値を解析してもよい。例えば、解析部10は、図3(c)(e)に示すように、表示面の奥側(Z座標の値はマイナス)であると解析した菱型のオブジェクトを表示する範囲S内の複数のラインのZ座標の値はマイナスであると解析し、表示面の手前側(Z座標の値はプラス)であると解析した五角形のオブジェクトを表示する範囲T内の複数のラインのZ座標の値はプラスであると解析する。なお、ラインのZ座標の値は、オブジェクトのZ座標に値と同様に、求めればよい。
なお、図3(e)において、太線の菱型、四角形、三角形、丸及び五角形は左目用画像におけるオブジェクト、細線の菱型、四角形、三角形(重なっているため非表示)、丸及び五角形は右目用画像におけるオブジェクト、破線は各オブジェクトの表示領域のY座標を示す補助線である。
【0032】
解析部10は、両眼性手がかりを解析した場合、解析結果を示す解析情報を表示制御部12に出力する。例えば、解析部10は、解析情報として、各オブジェクトのZ座標の値を表示制御部12に出力する。なお、解析部10は、表示部14のライン毎(又は、連続する複数のライン毎)のZ座標の値を解析した場合、当該ライン毎(又は、連続する複数のライン毎)のZ座標の値を表示制御部12に出力する。
【0033】
(合成画像における単眼性手がかりの解析)
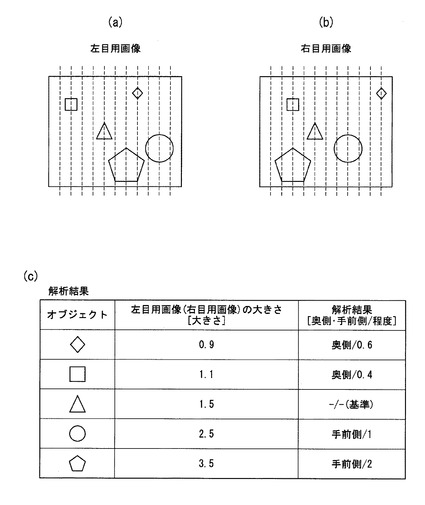
解析部10は、左目用画像又は右目用画像におけるオブジェクトの大きさに基づく単眼性手がかりを解析する。つまり、解析部10は、単眼性手がかりとして、左目用画像内のあるオブジェクトの領域(又は右目用画像内のオブジェクト)の領域がどの程度の大きさであるかを解析する。例えば、解析部10は、図4(a)に示す左目用画像及び図4(b)に示す右目用画像を合成した合成画像を多重画像生成装置3から取得した場合、当該合成画像における単眼性手がかりとして、図4(c)に示すように、左目用画像内のあるオブジェクトの領域(又は右目用画像内のオブジェクト)の領域がどの程度の大きさであるかを解析する。
【0034】
図4(a)(b)に示す例において、解析部10は、例えば、左目用画像における菱型のオブジェクトの大きさ「0.9」(説明の便宜上、X軸方向の長さが補助線N本分であるとき大きさ「N」とする)を得る。同様に、解析部10は、左目用画像における四角形のオブジェクトの大きさ「1.1」、左目用画像における三角形のオブジェクトの大きさ「1.5」、左目用画像における丸のオブジェクトの大きさ「2.5」、左目用画像における五角形のオブジェクトの大きさ「3.5」を得る。
【0035】
続いて、解析部10は、図4(c)に示すように、菱型のオブジェクトの単眼性手がかりとして、基準となるオブジェクト(説明の便宜上、基準(大きさが中央値)である三角形のオブジェクト)との大きさの差「−0.6」を算出する。即ち、解析部10は、菱型のオブジェクトについて、「0.6」程度、基準面よりも奥側に存在すると解析する。
【0036】
同様に、解析部10は、四角形のオブジェクトの単眼性手がかりとして、基準となるオブジェクトとの大きさの差「−0.4」を算出する。即ち、解析部10は、四角形のオブジェクトについて、「0.4」程度、基準面よりも奥側に存在すると解析する。
【0037】
また、解析部10は、三角形のオブジェクトの単眼性手がかりとして、基準となるオブジェクトとの大きさの差「0」を算出する。即ち、解析部10は、三角形のオブジェクトについて、基準面上に存在すると解析する。
【0038】
また、解析部10は、丸のオブジェクトの単眼性手がかりとして、基準となるオブジェクトとの大きさの差「1」を算出する。即ち、解析部10は、丸のオブジェクトについて、「1」程度、基準面よりも手前側に存在すると解析する。
【0039】
同様に、解析部10は、五角形のオブジェクトの単眼性手がかりとして、基準となるオブジェクトとの大きさの差「2」を算出する。即ち、解析部10は、五角形のオブジェクトについて、「2」程度、基準面よりも手前側に存在すると解析する。
【0040】
なお、解析部10による単眼性手がかりの解析は、左目用画像又は右目用画像におけるオブジェクトの大きさに基づく方法に限定されない。例えば、左目用画像又は右目用画像における明暗(明るい領域は近くに感じ、暗い領域は遠くに感じる)、濃淡(濃い色の領域は近くに感じ、淡い色の領域は遠くに感じる)、上下(下方の領域は近くに感じ、上方の領域は遠くに感じる)、色相(暖色の領域は近くに感じ、寒色の領域は遠くに感じる)などに基づいて単眼性手がかりを解析してもよい。
【0041】
なお、解析部10は、両眼性手がかりを解析した場合と同様、単眼性手がかりを解析した各オブジェクトの座標(X座標、Y座標、Z座標)から、表示部14のライン(Y軸上の位置)毎、若しくは、連続する複数のライン毎のZ軸方向の位置を更に解析してもよい。また、解析部10は、単眼性手がかりを解析した場合、両眼性手がかりを解析した場合と同様に、解析結果を示す解析情報を表示制御部12に出力する。
【0042】
表示制御部12は、解析情報を解析部10から取得する。表示制御部12は、解析情報を解析部10から取得した場合、当該解析情報に基づいて、当該合成画像の立体視効果が増大するように、表示部14による表示を制御する。具体的には、表示制御部12は、単眼性手がかりが存在する合成画像について、当該合成画像の単眼性手がかりが強調されるように表示部14による表示を制御し、単眼性手がかりが存在しない合成画像について、当該合成画像に単眼性手がかりが付加されるように表示部による表示を制御する。なお、上記「強調」「付加」は、元々の合成画像における単眼性手がかりの有無に対応し区別したものであって両者の制御内容は同様である。
【0043】
例えば、表示制御部12は、表示部14による表示の制御として、輝度、彩度又は色相の少なくとも1つを変更させる制御情報を表示部14に出力する。
【0044】
より詳細には、表示制御部12は、ライン毎の制御情報を表示部14に出力する。即ち、表示制御部12は、単眼性手がかりが存在する合成画像における、奥側(Z座標の値がマイナス)であると解析部10によって解析されたラインについて、奥側であることが絵画的に強調されるような制御情報を表示部14に出力し、手前側(Z座標の値がプラス)であると解析部10によって解析されたラインについて、手前側であることが絵画的に強調されるような制御情報を表示部14に出力する。
【0045】
また、表示制御部12は、単眼性手がかりが存在しない合成画像における、奥側であると解析部10によって解析されたラインについて、奥側であることが絵画的に付加されるような制御情報を表示部14に出力し、手前側であると解析部10によって解析されたラインについて、手前側であることが絵画的に付加されるような制御情報を表示部14に出力する。
【0046】
更に、表示制御部12は、上述のライン毎に代えて又は加えて、合成画像内のオブジェクト毎の制御情報を表示部14に出力してもよい。即ち、表示制御部12は、単眼性手がかりが存在する合成画像における、奥側であると解析部10によって解析されたオブジェクトについて、奥側であることが絵画的に強調されるような制御情報を表示部14に出力し、手前側であると解析部10によって解析されたオブジェクトについて、手前側であることが絵画的に強調されるような制御情報を表示部14に出力することができる。
【0047】
また、表示制御部12は、単眼性手がかりが存在しない合成画像における、奥側であると解析部10によって解析されたオブジェクトについて、奥側であることが絵画的に付加されるような制御情報を表示部14に出力し、手前側であると解析部10によって解析されたオブジェクトについて、手前側であることが絵画的に付加されるような制御情報を表示部14に出力することができる。
【0048】
なお、表示制御部12による制御情報は、ライン(又はライン内のオブジェクトを構成するカラム)を特定する表示位置情報と表示設定変更情報(輝度、彩度又は色相の設定を変更させる情報)とを対応付けたものであってもよいし、各ライン(又は各ライン内のオブジェクトを構成する1以上のカラム)の表示タイミングに応じて出力する上記表示設定変更情報であってもよい。
【0049】
また、輝度、彩度又は色相の少なくとも1つを変更させる制御情報は、ガンマ特性を変更させるものであってもよい。輝度、彩度及び色相の変更は、ガンマ特性を変更させることによっても実現するからである。
【0050】
以下、図5乃至図7を用いて、表示制御部12による表示部14の制御について更に説明する。図5は、ガンマ特性の変更例である。図6及び図7は、表示制御部による制御例である。
【0051】
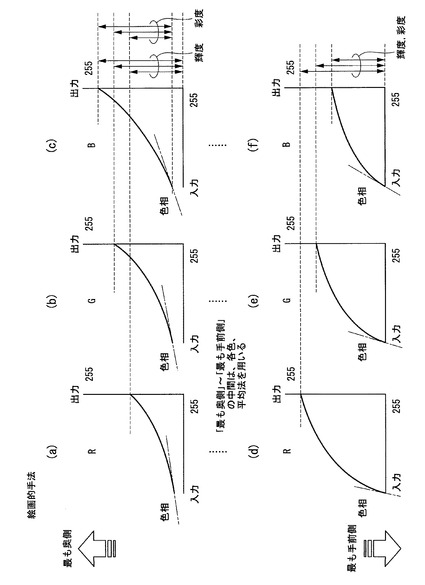
表示制御部12は、輝度、彩度又は色相の少なくとも1つを変更させる制御情報として、表示部14のガンマ特性を図5に示すように変更する制御情報を、表示部14に送信する。図5(a)は、最も奥側であると解析された画素に対する赤色信号(R値)のガンマ補正例である。図5(b)は、最も奥側であると解析された画素に対する緑色信号(G値)のガンマ補正例である。図5(c)は、最も奥側であると解析された画素に対する青色信号(B値)のガンマ補正例である。図5(d)は、最も手前側であると解析された画素に対する赤色信号(R値)のガンマ補正例である。図5(e)は、最も手前側であると解析された画素に対する緑色信号(G値)のガンマ補正例である。図5(f)は、最も手前側であると解析された画素に対する青色信号(B値)のガンマ補正例である。なお、最も奥側と最も手前側の中間における補正値は、各色とも、最も奥側と最も手前側の値から平均法を用いて算出する。
【0052】
図5(a)〜図5(f)に示すように、輝度は、ダイナミックレンジ(出力値の幅)によって制御(調整)する。具体的には、例えば、図5(a)(d)に示すように、Z座標の値が大きい一の画素(手前側のオブジェクト又はラインを構成する画素)に対する赤色信号のダイナミックレンジを、Z座標の値が小さい他の画素(奥側のオブジェクト又はラインを構成する画素)に対する赤色信号のダイナミックレンジよりも大きくする。これにより、仮に、最も手前側のオブジェクト又はラインを構成する画素であると解析された画素(例えば図5(d)参照)の元々の赤色の輝度値と、最も奥側のオブジェクト又はラインを構成する画素であると解析された画素(例えば図5(a)参照)の元々の赤色の輝度値とが同一であった場合には、最も手前側のオブジェクト又はラインを構成する画素であると解析された画素の赤色の輝度値は、最も奥側のオブジェクト又はラインを構成する画素であると解析された画素の赤色の輝度値よりも高くなる。
【0053】
彩度は、出力値の最大値によって制御する。具体的には、例えば、図5(a)(d)に示すように、Z座標の値が大きい一の画素に対する赤色信号の出力値の最大値を、Z座標の値が小さい他の画素に対する赤色信号の出力値の最大値よりも大きくする。これにより、仮に、最も手前側のオブジェクト又はラインを構成する画素であると解析された画素(例えば図5(d)参照)の元々の赤色の彩度値(彩度の程度を示す値)と、最も奥側のオブジェクト又はラインを構成する画素であると解析された画素(例えば図5(a)参照)の元々の赤色の彩度値とが同一であった場合には、最も手前側のオブジェクト又はラインを構成する画素であると解析された画素の赤色の彩度値は、最も奥側のオブジェクト又はラインを構成する画素であると解析された画素の赤色の彩度値よりも高くなる。
【0054】
色相は、出力値の立ち上がり具合(最小入力値における傾き)によって制御する。具体的には、例えば、図5(a)(d)に示すように、Z座標の値が大きい一の画素に対する赤色信号の最小入力値における傾きは、Z座標の値が小さい他の画素に対する赤色信号の最小入力値における傾きよりも大きくなるように制御する。これにより、仮に、最も手前側のオブジェクト又はラインを構成する画素であると解析された画素(例えば図5(d)参照)の元々の赤色の色相値(色味の強さを示す値)と、最も奥側のオブジェクト又はラインを構成する画素であると解析された画素(例えば図5(a)参照)の元々の赤色の色相値とが同一であった場合には、最も手前側のオブジェクト又はラインを構成する画素であると解析された画素の赤色の色相値は、最も奥側のオブジェクト又はラインを構成する画素であると解析された画素の赤色の色相値よりも高くなる。
【0055】
なお、表示部14が、図5(a)に示すガンマ補正に対応するテーブル(図5(a)に示すガンマ補正を実現させる、入力値と出力値とが対応付けられたデータ。以下、同様)、図5(b)に示すガンマ補正に対応するテーブル、…、図5(f)に示すガンマ補正に対応するテーブルなど複数のテーブルを保持し、表示制御部12は、制御情報として、複数のテーブルの中から、使用するテーブルを特定する情報を表示部14に出力する。また、表示制御部12は、制御情報として、使用するテーブル自体を表示部14に出力してもよい。
【0056】
表示部14は、多重画像を解析部10から取得する。また、表示部14は、制御情報を表示制御部12から取得する。表示部14は、表示制御部12から取得した制御情報に従って、解析部10から取得した多重画像を表示する。
【0057】
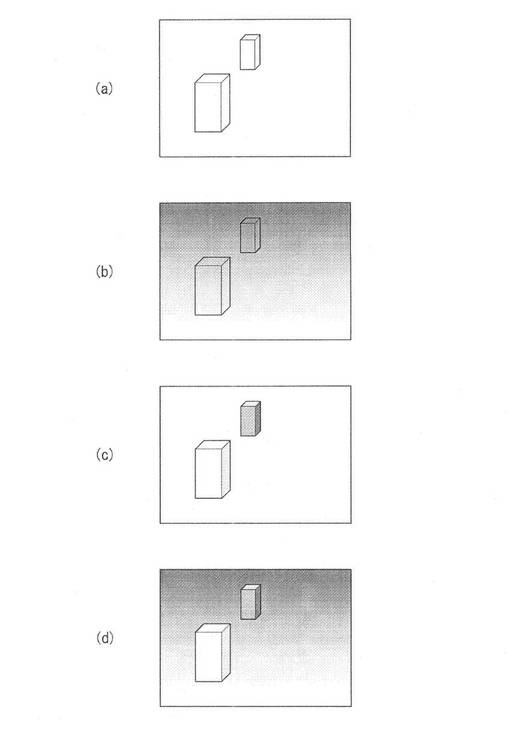
例えば、元々の多重画像(多重画像生成装置3から出力された段階の多重画像)が、図6(a)に示すような単眼性手がかりが存在する合成画像であった場合、表示部14は、図6(b)に示すような合成画像を表示する。図6(b)に示す多重画像は、図6(a)に示す合成画像に比べ単眼性手がかりが強調されている。具体的には、オブジェクトの領域も含めて、上部のラインほど暗くなっている。
また例えば、元々の多重画像が、図6(a)に示すような合成画像であった場合に、表示部14は、図6(c)に示すような合成画像を表示することもできる。図6(c)に示す多重画像は、図6(a)に示す合成画像に比べ単眼性手がかりが強調されている。具体的には、上部のラインのオブジェクトほど暗くなっている。
また例えば、元々の多重画像が、図6(a)に示すような合成画像であった場合に、表示部14は、図6(d)に示すような合成画像を表示することもできる。図6(d)に示す多重画像は、図6(b)と図6(c)を合わせたものである。
【0058】
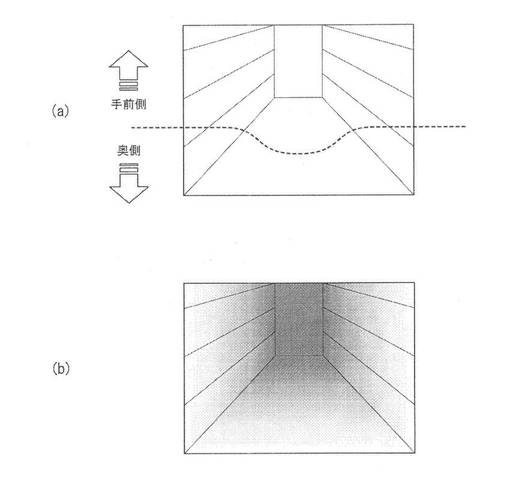
また、表示部14は、図7(a)に示すような元々の多重画像を、図7(b)に示すように表示することができる。つまり、解析部10は、元々の多重画像における、模様、オブジェクトの向きなどから奥行(Z座標の値のプラス/マイナス)を解析し、表示制御部12が、ライン内のオブジェクトを構成するカラムを特定する表示位置情報を含む制御情報を表示部14に出力し、又は、各ライン内のオブジェクトを構成する1以上のカラムの表示タイミングに応じて、制御情報(表示設定変更情報)を表示部14に出力すれば、表示部14は、図7(a)に示す多重画像を図7(b)の如く表示することができる。
なお、図7(a)の点線は、通路の両側の壁板の並びによる模様から解析された手前側と外側のパターンであって、各ラインにおいて、ラインの中央部分は、当該ラインの他の部分よりも奥側である旨を示している。
【0059】
(第2の実施形態)
本発明の第2の実施形態に係る立体画像表示制御装置2は、図1(b)に示すように、解析部20及び表示制御部22を備える。また、立体画像表示制御装置2は、多重画像生成装置3及び表示装置4と接続している。立体画像表示制御装置2が備える解析部20及び表示制御部22は、第1の実施形態に係る立体画像表示装置1が備える解析部10及び表示制御部12と、下記に説明する情報の入出力先を除き同様である。
【0060】
解析部20は、単眼性手がかり、又は、両眼性手がかりを解析した場合、解析情報を表示制御部22に出力する。但し、解析部20は、図1(b)に示すように、表示装置4が多重画像生成装置3から合成画像を取得する態様の場合、表示装置40に合成画像を出力する必要はない。表示制御部22は、解析情報を解析部20から取得した場合、当該解析情報に基づいて、当該合成画像の立体視効果が増大するように、表示装置4による表示を制御する。
【0061】
以上、第1の実施形態による立体画像表示装置1、第2の実施形態による立体画像表示制御装置2について説明したが、立体画像表示装置1、立体画像表示制御装置2によれば、単眼性手がかりを元々元有していた合成画像については単眼性手がかりを強調し、単眼性手がかりを有していなかった合成画像については単眼性手がかりを新たに付加するため、立体画像をより立体的に見せることができるようになる。
【0062】
なお、第1の実施形態による立体画像表示装置1の解析部10は、左目用画像及び右目用画像における同一オブジェクトの領域のずれ(ずれ方向及びずれ量)に基づく両眼性手がかりを解析する例を説明したが、解析部10は、奥行情報(Z座標の値)を有する画像を多重画像生成装置3から取得した場合には、当該奥行情報を加工して、解析情報として表示制御部12に出力してもよいし、当該奥行情報をそのまま解析情報として表示制御部12に出力してもよい。第2の実施形態による立体画像表示制御装置2の解析部20についても同様である。
【0063】
なお、本発明の実施形態による立体画像表示装置1、立体画像表示制御装置2の各処理を実行するためのプログラムをコンピューター読み取り可能な記録媒体に記録して、当該記録媒体に記録されたプログラムをコンピューターシステムに読み込ませ、実行することにより、本発明の実施形態による立体画像表示装置1、立体画像表示制御装置2に係る上述した種々の処理を行ってもよい。なお、ここでいう「コンピューターシステム」とは、OSや周辺機器等のハードウェアを含むものであってもよい。また、「コンピューターシステム」は、WWWシステムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。また、「コンピューター読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、フラッシュメモリー等の書き込み可能な不揮発性メモリー、CD−ROM等の可搬媒体、コンピューターシステムに内蔵されるハードディスク等の記憶装置のことをいう。
【0064】
さらに「コンピューター読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムが送信された場合のサーバーやクライアントとなるコンピューターシステム内部の揮発性メモリー(例えばDRAM(Dynamic Random Access Memory))のように、一定時間プログラムを保持しているものも含むものとする。また、上記プログラムは、このプログラムを記憶装置等に格納したコンピューターシステムから、伝送媒体を介して、あるいは、伝送媒体中の伝送波により他のコンピューターシステムに伝送されてもよい。ここで、プログラムを伝送する「伝送媒体」は、インターネット等のネットワーク(通信網)や電話回線等の通信回線(通信線)のように情報を伝送する機能を有する媒体のことをいう。また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピューターシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【0065】
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0066】
1…立体画像表示装置
2…立体画像表示制御装置
3…多重画像生成装置
4…表示装置
10、20…解析部
12、22…表示制御部
14…表示部
【技術分野】
【0001】
本発明は、立体画像表示装置、立体画像表示制御装置、立体画像表示方法、及び、プログラムに関するものである。
【背景技術】
【0002】
従来、左目用画像と右目用画像を利用して画像を立体的に表示する技術が開示されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−119066号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、立体視に好適な表示装置はなく、既存の液晶パネルをベースとしたものしか存在していない。つまり、立体視を実現するために、例えば、液晶パネル表面にバリアを配置した液晶パネル、或いは、液晶シャッターを配置した液晶パネルは存在するものの、立体画像をより効果的に見せる液晶パネルは存在していないという問題がある。
【0005】
本発明はこのような事情に鑑みてなされたものであって、立体画像をより立体的に見せる立体画像表示装置、立体画像表示制御装置、立体画像表示方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記問題を解決するために、本発明の一態様である立体画像表示装置は、立体視効果を利用して画像を立体的に表示する表示部と、左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析する解析部と、前記解析部による解析情報に基づいて、前記合成画像における単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御する表示制御部とを備えることを特徴とする。
上記構成によれば、単眼性手がかりが存在する合成画像について、当該合成画像の単眼性手がかりが強調されるように表示部による表示を制御し、単眼性手がかりが存在しない合成画像について、当該合成画像に単眼性手がかりが付加されるように表示部による表示を制御するため、立体画像をより立体的に見せることができるようになる。
【0007】
上記立体画像表示装置において、前記解析部は、前記合成画像の両眼性手がかりを解析するときは、左目用画像及び右目用画像における同一オブジェクトの領域のずれに基づく両眼性手がかりを解析するようにしてもよい。
上記構成によれば、合成画像として元々有している情報を活用し、両眼性手がかりを解析することができるため、効率的に、立体画像をより立体的に見せることができるようになる。
【0008】
上記立体画像表示装置において、前記表示制御部は、前記表示部による表示の制御として、輝度、彩度又は色相の少なくとも1つを変更させる制御情報を前記表示部に出力するようにしてもよい。
上記構成によれば、表示部は、制御情報に従って合成画像を表示するだけであるため、簡便に、立体画像をより立体的に見せることができるようになる。
【0009】
上記立体画像表示装置において、前記制御情報は、ガンマ特性を変更させるものであってもよい。
上記構成によれば、ガンマ特性を変更によって輝度、彩度及び色相を変更することができるため、簡便に、立体画像をより立体的に見せることができるようになる。
【0010】
上記立体画像表示装置において、前記表示制御部は、ライン毎の前記制御情報を前記表示部に出力するようにしてもよい。
上記構成によれば、単眼性手がかりの強調又は付加を表示面のライン毎に行うため、簡便に、立体画像をより立体的に見せることができるようになる。
【0011】
上記立体画像表示装置において、前記表示制御部は、前記合成画像内のオブジェクト毎の前記制御情報を前記表示部に出力するようにしてもよい。
上記構成によれば、単眼性手がかりの強調又は付加を表示するオブジェクト毎に行うため、きめ細かに、立体画像をより立体的に見せることができるようになる。
【0012】
上記問題を解決するために、本発明の一態様である立体画像表示制御装置は、左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析する解析部と、前記解析部による解析情報に基づいて、前記合成画像における単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御する表示制御部とを備えることを特徴とする。
上記構成によれば、上述の立体画像表示装置と同様に効果を得ることができる。
【0013】
上記問題を解決するために、本発明の一態様である立体画像表示方法は、立体視効果を利用して表示部に画像を立体的に表示する立体画像表示装置における立体画像表示方法であって、前記立体画像表示装置の解析手段が、左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析し、前記立体画像表示装置の表示制御手段が、前記解析部による解析情報に基づいて、前記合成画像の単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御することを特徴とする。
上記構成によれば、上述の立体画像表示装置と同様に効果を得ることができる。
【0014】
上記問題を解決するために、本発明の一態様であるプログラムは、立体視効果を利用して表示部に画像を立体的に表示する立体画像表示装置のコンピューターに、左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析する解析ステップと、前記解析ステップによる解析情報に基づいて、前記合成画像における単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御する表示制御ステップとを実行させることを特徴とする。
上記構成によれば、上述の立体画像表示装置と同様に効果を得ることができる。
【図面の簡単な説明】
【0015】
【図1】(a)は、本発明の第1の実施形態に係る立体画像表示装置の機能ブロック図、(b)は、第2の実施形態に係る立体画像表示制御装置の機能ブロック図である。
【図2】単眼性手がかりが存在する合成画像と単眼性手がかりが存在しない合成画像の一例であり、(a)は、単眼性手がかりが存在する合成画像における左目用画像の一例、(b)は、単眼性手がかりが存在する合成画像における右目用画像の一例、(c)は、単眼性手がかりが存在しない合成画像における左目用画像の一例、(d)は、単眼性手がかりが存在しない合成画像における右目用画像の一例である。
【図3】解析部による両眼性手がかりの解析を説明するための図であり、(a)は、左目用画像の一例、(b)は、右目用画像の一例、(c)は、(a)(b)から得られる解析結果の一例、(d)は、(c)の解析結果に関する模式図、(e)は、ラインの解析の概念図である。
【図4】解析部による単眼性手がかりの解析を説明するための図であり、(a)は、左目用画像の一例、(b)は、右目用画像の一例、(c)は、(a)(b)から得られる解析結果の一例である。
【図5】ガンマ特性の変更例であり、(a)は、最も奥側であると解析された画素に対する赤色信号(R値)のガンマ補正例、(b)は、最も奥側であると解析された画素に対する緑色信号(G値)のガンマ補正例、(c)は、最も奥側であると解析された画素に対する青色信号(B値)のガンマ補正例、(d)は、最も手前側であると解析された画素に対する赤色信号(R値)のガンマ補正例、(e)は、最も手前側であると解析された画素に対する緑色信号(G値)のガンマ補正例、(f)は、最も手前側であると解析された画素に対する青色信号(B値)のガンマ補正例である。
【図6】表示制御部による制御例であり、(a)は、多重画像生成装置から出力された合成画像、(b)〜(d)は、夫々、表示制御部による制御によって表示部に表示された(a)に示す合成画像の表示例である。
【図7】表示制御部による制御例であり、(a)は、夫々、多重画像生成装置から出力された合成画像、(b)は、表示制御部による制御によって表示部に表示された(a)に示す合成画像の表示例である。
【発明を実施するための形態】
【0016】
(第1の実施形態)
以下、本発明の第1の実施形態について図面を参照して詳細に説明する。図1は、本発明の第1の実施形態に係る立体画像表示装置の機能ブロック図、及び、第2の実施形態に係る立体画像表示制御装置の機能ブロック図である。図2は、単眼性手がかりが存在する合成画像と単眼性手がかりが存在しない合成画像の一例である。図3は、解析部による両眼性手がかりの解析を説明するための図である。図4は、解析部による両眼性手がかりの解析を説明するための図である。
【0017】
本発明の第1の実施形態に係る立体画像表示装置1は、立体視効果を利用して画像を立体的に表示する装置である。立体画像表示装置1は、図1(a)に示すように、解析部10、表示制御部12及び表示部14を備える。また、立体画像表示装置1は、多重画像生成装置3と接続している。
【0018】
多重画像生成装置3は、左目用画像及び右目用画像を合成した合成画像を生成する装置である。左目用画像及び右目用画像は、人間の左右の目に対応する視差画像である。従って、多重画像生成装置3が生成する合成画像には、画像の立体視効果を与える要素の1つである、両眼性手がかり(「生理的手がかり」とも称する)が存在する。また、多重画像生成装置3が生成する合成画像を形成する左目用画像及び右目用画像には、画像の立体視効果を与える要素の1つである単眼性手がかり(「絵画的手がかり」とも称する)が存在する場合もある。
【0019】
つまり、立体画像における立体視効果は、両眼性手がかりによるものと、単眼性手がかりによるもととが存在するが、多重画像生成装置3は、両眼性手がかりに加え単眼性手がかりが存在する合成画像も、両眼性手がかりのみが存在し単眼性手がかりが存在しない合成画像も生成することができる。
【0020】
両眼性手がかりに加え単眼性手がかりが存在する合成画像とは、単眼性手がかりを有する左目用画像(例えば図2(a)参照)、及び、右目用画像(例えば図2(b)参照)から合成された合成画像である。図2(a)に示す左目用画像及び図2(b)に示す右目用画像は、単眼性手がかりの一態様(大きいオブジェクトは近く(手前)に感じ、小さいオブジェクトは遠く(奥)に感じるという態様)を有している。
【0021】
一方、両眼性手がかりのみが存在し単眼性手がかりが存在しない合成画像とは、単眼性手がかりを有しない左目用画像(例えば図2(c)参照)、及び、右目用画像(例えば図2(d)参照)から合成された合成画像である。なお、図2において、菱型、四角形、三角形、丸及び五角形はオブジェクト、破線は各オブジェクトの表示領域の左右(後述のX軸方向)の位置を示す補助線である(後述の図3(a)(b)についても同様である)。
【0022】
解析部10は、合成画像を多重画像生成装置3から取得する。解析部10は、合成画像を多重画像生成装置3から取得した場合、当該合成画像を表示部14に出力する。また、解析部10は、多重画像生成装置3から取得した合成画像における両眼性手がかり、又は、単眼性手がかりを解析する。具体的には、解析部10は、単眼性手がかりが存在する合成画像を多重画像生成装置3から取得した場合、当該合成画像の両眼性手がかり又は単眼性手がかりの少なくとも一方を解析し、単眼性手がかりが存在しない合成画像を多重画像生成装置3から取得した場合、当該合成画像の両眼性手がかりを解析する。
なお、解析部10が、単眼性手がかりが存在する合成画像を取得した場合に、両眼性手がかりを解析するか、単眼性手がかりを解析するか、その両方を解析するかは、立体画像表示装置1において、予め設定しておいてもよいし、立体画像表示装置1のユーザーによって選択可能であってもよい。
以下、合成画像における両眼性手がかりの解析、合成画像における単眼性手がかりを解析の夫々について説明する。
【0023】
(合成画像における両眼性手がかりの解析)
解析部10は、左目用画像及び右目用画像における同一オブジェクトの領域のずれ(ずれ方向及びずれ量)に基づく両眼性手がかりを解析する。つまり、解析部10は、両眼性手がかりとして、左目用画像内のあるオブジェクトの領域に対して、右目用画像内の当該オブジェクトの領域がどの程度ずれているかを解析する。例えば、解析部10は、図3(a)に示す左目用画像及び図3(b)に示す右目用画像を合成した合成画像を多重画像生成装置3から取得した場合、当該合成画像における両眼性手がかりとして、図3(c)に示すように、左目用画像内のあるオブジェクトの領域に対して、右目用画像内の当該オブジェクトの領域がどの程度ずれているかを解析する。
【0024】
即ち、図3(a)(b)に示す例において、解析部10は、例えば、菱型のオブジェクトの左目用画像の位置「O」及び菱型のオブジェクトの右目用画像の位置「R」から、左目用画像に対する右目用画像の菱型のオブジェクトのずれ方向「右方向」、及び、ずれ量「3」(説明の便宜上、補助線N本分のずれをずれ量「N」とする)を得る。そして、解析部10は、図3(c)に示すように、菱型のオブジェクトの両眼性手がかりとして、「3」程度(説明の便宜上、ずれ量「N」のずれは「N」程度のずれとする)、基準面(例えば表示部14の表示面)よりも奥側に存在すると解析(判断)する。
【0025】
同様に、解析部10は、四角形のオブジェクトの左目用画像の位置「I」及び四角形のオブジェクトの右目用画像の位置「J」から、左目用画像に対する右目用画像の四角形のオブジェクトのずれ方向「右方向」、及び、ずれ量「1」を得る。そして、解析部10は、図3(c)に示すように、四角形のオブジェクトの両眼性手がかりとして、「1」程度、基準面よりも奥側に存在すると解析する。
【0026】
また例えば、解析部10は、三角形のオブジェクトの左目用画像の位置「L」及び三角形のオブジェクトの右目用画像の位置「L」から、左目用画像に対する右目用画像の三角形のオブジェクトのずれ方向「−(ずれ無)」、及び、ずれ量「−(ずれ無)」を得る。そして、解析部10は、図3(c)に示すように、三角形のオブジェクトの両眼性手がかりとして、基準面上に存在すると解析する。
【0027】
また例えば、解析部10は、丸のオブジェクトの左目用画像の位置「Q」及び丸のオブジェクトの右目用画像の位置「O」から、左目用画像に対する右目用画像の丸のオブジェクトのずれ方向「左方向」、及び、ずれ量「2」を得る。そして、解析部10は、図3(c)に示すように、丸のオブジェクトの両眼性手がかりとして、「2」程度、基準面よりも手前側に存在すると解析する。
【0028】
同様に、解析部10は、五角形のオブジェクトの左目用画像の位置「N」及び五角形のオブジェクトの右目用画像の位置「J」から、左目用画像に対する右目用画像の五角形のオブジェクトのずれ方向「左方向」、及び、ずれ量「4」を得る。そして、解析部10は、図2(c)に示すように、五角形のオブジェクトの単眼性手がかりとして、「4」程度、基準面よりも手前側に存在すると解析する。
【0029】
つまり、図3(d)に示すように、表示部14の表示面をX軸及びY軸、表示部14の表示面に垂直な方向をZ軸(表示画をゼロ、表示面の手前側に飛び出す方向をプラス、表示面の奥側に引っ込む方向をマイナスとする)とするとき、解析部10は、あるオブジェクトについて、左目用画像に対する右目用画像のずれ方向が右方向であるときは、当該オブジェクトのZ座標の値は、そのずれ量に応じた程度、マイナスであると解析し、左目用画像に対する右目用画像のずれ方向が左方向であるときは、当該オブジェクトのZ座標の値は、そのずれ量に応じた程度、プラスであると解析し、左目用画像に対する右目用画像のずれが無いときは、当該オブジェクトのZ座標の値は、ゼロ(無)であると解析する。
【0030】
なお、図3(c)に示す例では、左目用画像に対する右目用画像のずれに着目しているが、反対に、右目用画像に対する左目用画像のずれに着目してもよい。例えば、解析部10は、あるオブジェクトについて、右目用画像に対する左目用画像のずれ方向が右方向であるときは、当該オブジェクトのZ座標の値は、そのずれ量に応じた程度、プラスであると解析し、右目用画像に対する左目用画像のずれ方向が左方向であるときは、当該オブジェクトのZ座標の値は、そのずれ量に応じた程度、マイナスであると解析する。
【0031】
なお、両眼性手がかりとして、各オブジェクトのZ座標の値を解析した解析部10は、両眼性手がかりとして、更に、表示部14のライン(Y座標の値が同じ画素の群)毎のZ座標の値、又は、連続する複数のライン毎のZ座標の値を解析してもよい。例えば、解析部10は、図3(c)(e)に示すように、表示面の奥側(Z座標の値はマイナス)であると解析した菱型のオブジェクトを表示する範囲S内の複数のラインのZ座標の値はマイナスであると解析し、表示面の手前側(Z座標の値はプラス)であると解析した五角形のオブジェクトを表示する範囲T内の複数のラインのZ座標の値はプラスであると解析する。なお、ラインのZ座標の値は、オブジェクトのZ座標に値と同様に、求めればよい。
なお、図3(e)において、太線の菱型、四角形、三角形、丸及び五角形は左目用画像におけるオブジェクト、細線の菱型、四角形、三角形(重なっているため非表示)、丸及び五角形は右目用画像におけるオブジェクト、破線は各オブジェクトの表示領域のY座標を示す補助線である。
【0032】
解析部10は、両眼性手がかりを解析した場合、解析結果を示す解析情報を表示制御部12に出力する。例えば、解析部10は、解析情報として、各オブジェクトのZ座標の値を表示制御部12に出力する。なお、解析部10は、表示部14のライン毎(又は、連続する複数のライン毎)のZ座標の値を解析した場合、当該ライン毎(又は、連続する複数のライン毎)のZ座標の値を表示制御部12に出力する。
【0033】
(合成画像における単眼性手がかりの解析)
解析部10は、左目用画像又は右目用画像におけるオブジェクトの大きさに基づく単眼性手がかりを解析する。つまり、解析部10は、単眼性手がかりとして、左目用画像内のあるオブジェクトの領域(又は右目用画像内のオブジェクト)の領域がどの程度の大きさであるかを解析する。例えば、解析部10は、図4(a)に示す左目用画像及び図4(b)に示す右目用画像を合成した合成画像を多重画像生成装置3から取得した場合、当該合成画像における単眼性手がかりとして、図4(c)に示すように、左目用画像内のあるオブジェクトの領域(又は右目用画像内のオブジェクト)の領域がどの程度の大きさであるかを解析する。
【0034】
図4(a)(b)に示す例において、解析部10は、例えば、左目用画像における菱型のオブジェクトの大きさ「0.9」(説明の便宜上、X軸方向の長さが補助線N本分であるとき大きさ「N」とする)を得る。同様に、解析部10は、左目用画像における四角形のオブジェクトの大きさ「1.1」、左目用画像における三角形のオブジェクトの大きさ「1.5」、左目用画像における丸のオブジェクトの大きさ「2.5」、左目用画像における五角形のオブジェクトの大きさ「3.5」を得る。
【0035】
続いて、解析部10は、図4(c)に示すように、菱型のオブジェクトの単眼性手がかりとして、基準となるオブジェクト(説明の便宜上、基準(大きさが中央値)である三角形のオブジェクト)との大きさの差「−0.6」を算出する。即ち、解析部10は、菱型のオブジェクトについて、「0.6」程度、基準面よりも奥側に存在すると解析する。
【0036】
同様に、解析部10は、四角形のオブジェクトの単眼性手がかりとして、基準となるオブジェクトとの大きさの差「−0.4」を算出する。即ち、解析部10は、四角形のオブジェクトについて、「0.4」程度、基準面よりも奥側に存在すると解析する。
【0037】
また、解析部10は、三角形のオブジェクトの単眼性手がかりとして、基準となるオブジェクトとの大きさの差「0」を算出する。即ち、解析部10は、三角形のオブジェクトについて、基準面上に存在すると解析する。
【0038】
また、解析部10は、丸のオブジェクトの単眼性手がかりとして、基準となるオブジェクトとの大きさの差「1」を算出する。即ち、解析部10は、丸のオブジェクトについて、「1」程度、基準面よりも手前側に存在すると解析する。
【0039】
同様に、解析部10は、五角形のオブジェクトの単眼性手がかりとして、基準となるオブジェクトとの大きさの差「2」を算出する。即ち、解析部10は、五角形のオブジェクトについて、「2」程度、基準面よりも手前側に存在すると解析する。
【0040】
なお、解析部10による単眼性手がかりの解析は、左目用画像又は右目用画像におけるオブジェクトの大きさに基づく方法に限定されない。例えば、左目用画像又は右目用画像における明暗(明るい領域は近くに感じ、暗い領域は遠くに感じる)、濃淡(濃い色の領域は近くに感じ、淡い色の領域は遠くに感じる)、上下(下方の領域は近くに感じ、上方の領域は遠くに感じる)、色相(暖色の領域は近くに感じ、寒色の領域は遠くに感じる)などに基づいて単眼性手がかりを解析してもよい。
【0041】
なお、解析部10は、両眼性手がかりを解析した場合と同様、単眼性手がかりを解析した各オブジェクトの座標(X座標、Y座標、Z座標)から、表示部14のライン(Y軸上の位置)毎、若しくは、連続する複数のライン毎のZ軸方向の位置を更に解析してもよい。また、解析部10は、単眼性手がかりを解析した場合、両眼性手がかりを解析した場合と同様に、解析結果を示す解析情報を表示制御部12に出力する。
【0042】
表示制御部12は、解析情報を解析部10から取得する。表示制御部12は、解析情報を解析部10から取得した場合、当該解析情報に基づいて、当該合成画像の立体視効果が増大するように、表示部14による表示を制御する。具体的には、表示制御部12は、単眼性手がかりが存在する合成画像について、当該合成画像の単眼性手がかりが強調されるように表示部14による表示を制御し、単眼性手がかりが存在しない合成画像について、当該合成画像に単眼性手がかりが付加されるように表示部による表示を制御する。なお、上記「強調」「付加」は、元々の合成画像における単眼性手がかりの有無に対応し区別したものであって両者の制御内容は同様である。
【0043】
例えば、表示制御部12は、表示部14による表示の制御として、輝度、彩度又は色相の少なくとも1つを変更させる制御情報を表示部14に出力する。
【0044】
より詳細には、表示制御部12は、ライン毎の制御情報を表示部14に出力する。即ち、表示制御部12は、単眼性手がかりが存在する合成画像における、奥側(Z座標の値がマイナス)であると解析部10によって解析されたラインについて、奥側であることが絵画的に強調されるような制御情報を表示部14に出力し、手前側(Z座標の値がプラス)であると解析部10によって解析されたラインについて、手前側であることが絵画的に強調されるような制御情報を表示部14に出力する。
【0045】
また、表示制御部12は、単眼性手がかりが存在しない合成画像における、奥側であると解析部10によって解析されたラインについて、奥側であることが絵画的に付加されるような制御情報を表示部14に出力し、手前側であると解析部10によって解析されたラインについて、手前側であることが絵画的に付加されるような制御情報を表示部14に出力する。
【0046】
更に、表示制御部12は、上述のライン毎に代えて又は加えて、合成画像内のオブジェクト毎の制御情報を表示部14に出力してもよい。即ち、表示制御部12は、単眼性手がかりが存在する合成画像における、奥側であると解析部10によって解析されたオブジェクトについて、奥側であることが絵画的に強調されるような制御情報を表示部14に出力し、手前側であると解析部10によって解析されたオブジェクトについて、手前側であることが絵画的に強調されるような制御情報を表示部14に出力することができる。
【0047】
また、表示制御部12は、単眼性手がかりが存在しない合成画像における、奥側であると解析部10によって解析されたオブジェクトについて、奥側であることが絵画的に付加されるような制御情報を表示部14に出力し、手前側であると解析部10によって解析されたオブジェクトについて、手前側であることが絵画的に付加されるような制御情報を表示部14に出力することができる。
【0048】
なお、表示制御部12による制御情報は、ライン(又はライン内のオブジェクトを構成するカラム)を特定する表示位置情報と表示設定変更情報(輝度、彩度又は色相の設定を変更させる情報)とを対応付けたものであってもよいし、各ライン(又は各ライン内のオブジェクトを構成する1以上のカラム)の表示タイミングに応じて出力する上記表示設定変更情報であってもよい。
【0049】
また、輝度、彩度又は色相の少なくとも1つを変更させる制御情報は、ガンマ特性を変更させるものであってもよい。輝度、彩度及び色相の変更は、ガンマ特性を変更させることによっても実現するからである。
【0050】
以下、図5乃至図7を用いて、表示制御部12による表示部14の制御について更に説明する。図5は、ガンマ特性の変更例である。図6及び図7は、表示制御部による制御例である。
【0051】
表示制御部12は、輝度、彩度又は色相の少なくとも1つを変更させる制御情報として、表示部14のガンマ特性を図5に示すように変更する制御情報を、表示部14に送信する。図5(a)は、最も奥側であると解析された画素に対する赤色信号(R値)のガンマ補正例である。図5(b)は、最も奥側であると解析された画素に対する緑色信号(G値)のガンマ補正例である。図5(c)は、最も奥側であると解析された画素に対する青色信号(B値)のガンマ補正例である。図5(d)は、最も手前側であると解析された画素に対する赤色信号(R値)のガンマ補正例である。図5(e)は、最も手前側であると解析された画素に対する緑色信号(G値)のガンマ補正例である。図5(f)は、最も手前側であると解析された画素に対する青色信号(B値)のガンマ補正例である。なお、最も奥側と最も手前側の中間における補正値は、各色とも、最も奥側と最も手前側の値から平均法を用いて算出する。
【0052】
図5(a)〜図5(f)に示すように、輝度は、ダイナミックレンジ(出力値の幅)によって制御(調整)する。具体的には、例えば、図5(a)(d)に示すように、Z座標の値が大きい一の画素(手前側のオブジェクト又はラインを構成する画素)に対する赤色信号のダイナミックレンジを、Z座標の値が小さい他の画素(奥側のオブジェクト又はラインを構成する画素)に対する赤色信号のダイナミックレンジよりも大きくする。これにより、仮に、最も手前側のオブジェクト又はラインを構成する画素であると解析された画素(例えば図5(d)参照)の元々の赤色の輝度値と、最も奥側のオブジェクト又はラインを構成する画素であると解析された画素(例えば図5(a)参照)の元々の赤色の輝度値とが同一であった場合には、最も手前側のオブジェクト又はラインを構成する画素であると解析された画素の赤色の輝度値は、最も奥側のオブジェクト又はラインを構成する画素であると解析された画素の赤色の輝度値よりも高くなる。
【0053】
彩度は、出力値の最大値によって制御する。具体的には、例えば、図5(a)(d)に示すように、Z座標の値が大きい一の画素に対する赤色信号の出力値の最大値を、Z座標の値が小さい他の画素に対する赤色信号の出力値の最大値よりも大きくする。これにより、仮に、最も手前側のオブジェクト又はラインを構成する画素であると解析された画素(例えば図5(d)参照)の元々の赤色の彩度値(彩度の程度を示す値)と、最も奥側のオブジェクト又はラインを構成する画素であると解析された画素(例えば図5(a)参照)の元々の赤色の彩度値とが同一であった場合には、最も手前側のオブジェクト又はラインを構成する画素であると解析された画素の赤色の彩度値は、最も奥側のオブジェクト又はラインを構成する画素であると解析された画素の赤色の彩度値よりも高くなる。
【0054】
色相は、出力値の立ち上がり具合(最小入力値における傾き)によって制御する。具体的には、例えば、図5(a)(d)に示すように、Z座標の値が大きい一の画素に対する赤色信号の最小入力値における傾きは、Z座標の値が小さい他の画素に対する赤色信号の最小入力値における傾きよりも大きくなるように制御する。これにより、仮に、最も手前側のオブジェクト又はラインを構成する画素であると解析された画素(例えば図5(d)参照)の元々の赤色の色相値(色味の強さを示す値)と、最も奥側のオブジェクト又はラインを構成する画素であると解析された画素(例えば図5(a)参照)の元々の赤色の色相値とが同一であった場合には、最も手前側のオブジェクト又はラインを構成する画素であると解析された画素の赤色の色相値は、最も奥側のオブジェクト又はラインを構成する画素であると解析された画素の赤色の色相値よりも高くなる。
【0055】
なお、表示部14が、図5(a)に示すガンマ補正に対応するテーブル(図5(a)に示すガンマ補正を実現させる、入力値と出力値とが対応付けられたデータ。以下、同様)、図5(b)に示すガンマ補正に対応するテーブル、…、図5(f)に示すガンマ補正に対応するテーブルなど複数のテーブルを保持し、表示制御部12は、制御情報として、複数のテーブルの中から、使用するテーブルを特定する情報を表示部14に出力する。また、表示制御部12は、制御情報として、使用するテーブル自体を表示部14に出力してもよい。
【0056】
表示部14は、多重画像を解析部10から取得する。また、表示部14は、制御情報を表示制御部12から取得する。表示部14は、表示制御部12から取得した制御情報に従って、解析部10から取得した多重画像を表示する。
【0057】
例えば、元々の多重画像(多重画像生成装置3から出力された段階の多重画像)が、図6(a)に示すような単眼性手がかりが存在する合成画像であった場合、表示部14は、図6(b)に示すような合成画像を表示する。図6(b)に示す多重画像は、図6(a)に示す合成画像に比べ単眼性手がかりが強調されている。具体的には、オブジェクトの領域も含めて、上部のラインほど暗くなっている。
また例えば、元々の多重画像が、図6(a)に示すような合成画像であった場合に、表示部14は、図6(c)に示すような合成画像を表示することもできる。図6(c)に示す多重画像は、図6(a)に示す合成画像に比べ単眼性手がかりが強調されている。具体的には、上部のラインのオブジェクトほど暗くなっている。
また例えば、元々の多重画像が、図6(a)に示すような合成画像であった場合に、表示部14は、図6(d)に示すような合成画像を表示することもできる。図6(d)に示す多重画像は、図6(b)と図6(c)を合わせたものである。
【0058】
また、表示部14は、図7(a)に示すような元々の多重画像を、図7(b)に示すように表示することができる。つまり、解析部10は、元々の多重画像における、模様、オブジェクトの向きなどから奥行(Z座標の値のプラス/マイナス)を解析し、表示制御部12が、ライン内のオブジェクトを構成するカラムを特定する表示位置情報を含む制御情報を表示部14に出力し、又は、各ライン内のオブジェクトを構成する1以上のカラムの表示タイミングに応じて、制御情報(表示設定変更情報)を表示部14に出力すれば、表示部14は、図7(a)に示す多重画像を図7(b)の如く表示することができる。
なお、図7(a)の点線は、通路の両側の壁板の並びによる模様から解析された手前側と外側のパターンであって、各ラインにおいて、ラインの中央部分は、当該ラインの他の部分よりも奥側である旨を示している。
【0059】
(第2の実施形態)
本発明の第2の実施形態に係る立体画像表示制御装置2は、図1(b)に示すように、解析部20及び表示制御部22を備える。また、立体画像表示制御装置2は、多重画像生成装置3及び表示装置4と接続している。立体画像表示制御装置2が備える解析部20及び表示制御部22は、第1の実施形態に係る立体画像表示装置1が備える解析部10及び表示制御部12と、下記に説明する情報の入出力先を除き同様である。
【0060】
解析部20は、単眼性手がかり、又は、両眼性手がかりを解析した場合、解析情報を表示制御部22に出力する。但し、解析部20は、図1(b)に示すように、表示装置4が多重画像生成装置3から合成画像を取得する態様の場合、表示装置40に合成画像を出力する必要はない。表示制御部22は、解析情報を解析部20から取得した場合、当該解析情報に基づいて、当該合成画像の立体視効果が増大するように、表示装置4による表示を制御する。
【0061】
以上、第1の実施形態による立体画像表示装置1、第2の実施形態による立体画像表示制御装置2について説明したが、立体画像表示装置1、立体画像表示制御装置2によれば、単眼性手がかりを元々元有していた合成画像については単眼性手がかりを強調し、単眼性手がかりを有していなかった合成画像については単眼性手がかりを新たに付加するため、立体画像をより立体的に見せることができるようになる。
【0062】
なお、第1の実施形態による立体画像表示装置1の解析部10は、左目用画像及び右目用画像における同一オブジェクトの領域のずれ(ずれ方向及びずれ量)に基づく両眼性手がかりを解析する例を説明したが、解析部10は、奥行情報(Z座標の値)を有する画像を多重画像生成装置3から取得した場合には、当該奥行情報を加工して、解析情報として表示制御部12に出力してもよいし、当該奥行情報をそのまま解析情報として表示制御部12に出力してもよい。第2の実施形態による立体画像表示制御装置2の解析部20についても同様である。
【0063】
なお、本発明の実施形態による立体画像表示装置1、立体画像表示制御装置2の各処理を実行するためのプログラムをコンピューター読み取り可能な記録媒体に記録して、当該記録媒体に記録されたプログラムをコンピューターシステムに読み込ませ、実行することにより、本発明の実施形態による立体画像表示装置1、立体画像表示制御装置2に係る上述した種々の処理を行ってもよい。なお、ここでいう「コンピューターシステム」とは、OSや周辺機器等のハードウェアを含むものであってもよい。また、「コンピューターシステム」は、WWWシステムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。また、「コンピューター読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、フラッシュメモリー等の書き込み可能な不揮発性メモリー、CD−ROM等の可搬媒体、コンピューターシステムに内蔵されるハードディスク等の記憶装置のことをいう。
【0064】
さらに「コンピューター読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムが送信された場合のサーバーやクライアントとなるコンピューターシステム内部の揮発性メモリー(例えばDRAM(Dynamic Random Access Memory))のように、一定時間プログラムを保持しているものも含むものとする。また、上記プログラムは、このプログラムを記憶装置等に格納したコンピューターシステムから、伝送媒体を介して、あるいは、伝送媒体中の伝送波により他のコンピューターシステムに伝送されてもよい。ここで、プログラムを伝送する「伝送媒体」は、インターネット等のネットワーク(通信網)や電話回線等の通信回線(通信線)のように情報を伝送する機能を有する媒体のことをいう。また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピューターシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【0065】
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0066】
1…立体画像表示装置
2…立体画像表示制御装置
3…多重画像生成装置
4…表示装置
10、20…解析部
12、22…表示制御部
14…表示部
【特許請求の範囲】
【請求項1】
立体視効果を利用して画像を立体的に表示する表示部と、
左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析する解析部と、
前記解析部による解析情報に基づいて、前記合成画像における単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御する表示制御部と
を備えることを特徴とする立体画像表示装置。
【請求項2】
前記解析部は、前記合成画像の両眼性手がかりを解析するときは、左目用画像及び右目用画像における同一オブジェクトの領域のずれに基づく両眼性手がかりを解析することを特徴とする請求項1に記載の立体画像表示装置。
【請求項3】
前記表示制御部は、前記表示部による表示の制御として、輝度、彩度又は色相の少なくとも1つを変更させる制御情報を前記表示部に出力することを特徴とする請求項1又は請求項2に記載の立体画像表示装置。
【請求項4】
前記制御情報は、ガンマ特性を変更させるものであることを特徴とする請求項3に記載の立体画像表示装置。
【請求項5】
前記表示制御部は、ライン毎の前記制御情報を前記表示部に出力することを特徴とする請求項2又は請求項3に記載の立体画像表示装置。
【請求項6】
前記表示制御部は、前記合成画像内のオブジェクト毎の前記制御情報を前記表示部に出力することを特徴とする請求項2又は請求項3に記載の立体画像表示装置。
【請求項7】
左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析する解析部と、
前記解析部による解析情報に基づいて、前記合成画像における単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御する表示制御部と
を備えることを特徴とする立体画像表示制御装置。
【請求項8】
立体視効果を利用して表示部に画像を立体的に表示する立体画像表示装置における立体画像表示方法であって、
前記立体画像表示装置の解析手段が、左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析し、
前記立体画像表示装置の表示制御手段が、前記解析部による解析情報に基づいて、前記合成画像の単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御することを特徴とする立体画像表示方法。
【請求項9】
立体視効果を利用して表示部に画像を立体的に表示する立体画像表示装置のコンピューターに、
左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析する解析ステップと、
前記解析ステップによる解析情報に基づいて、前記合成画像における単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御する表示制御ステップと
を実行させることを特徴とするプログラム。
【請求項1】
立体視効果を利用して画像を立体的に表示する表示部と、
左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析する解析部と、
前記解析部による解析情報に基づいて、前記合成画像における単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御する表示制御部と
を備えることを特徴とする立体画像表示装置。
【請求項2】
前記解析部は、前記合成画像の両眼性手がかりを解析するときは、左目用画像及び右目用画像における同一オブジェクトの領域のずれに基づく両眼性手がかりを解析することを特徴とする請求項1に記載の立体画像表示装置。
【請求項3】
前記表示制御部は、前記表示部による表示の制御として、輝度、彩度又は色相の少なくとも1つを変更させる制御情報を前記表示部に出力することを特徴とする請求項1又は請求項2に記載の立体画像表示装置。
【請求項4】
前記制御情報は、ガンマ特性を変更させるものであることを特徴とする請求項3に記載の立体画像表示装置。
【請求項5】
前記表示制御部は、ライン毎の前記制御情報を前記表示部に出力することを特徴とする請求項2又は請求項3に記載の立体画像表示装置。
【請求項6】
前記表示制御部は、前記合成画像内のオブジェクト毎の前記制御情報を前記表示部に出力することを特徴とする請求項2又は請求項3に記載の立体画像表示装置。
【請求項7】
左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析する解析部と、
前記解析部による解析情報に基づいて、前記合成画像における単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御する表示制御部と
を備えることを特徴とする立体画像表示制御装置。
【請求項8】
立体視効果を利用して表示部に画像を立体的に表示する立体画像表示装置における立体画像表示方法であって、
前記立体画像表示装置の解析手段が、左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析し、
前記立体画像表示装置の表示制御手段が、前記解析部による解析情報に基づいて、前記合成画像の単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御することを特徴とする立体画像表示方法。
【請求項9】
立体視効果を利用して表示部に画像を立体的に表示する立体画像表示装置のコンピューターに、
左目用画像及び右目用画像を合成した合成画像における両眼性手がかり又は単眼性手がかりを解析する解析ステップと、
前記解析ステップによる解析情報に基づいて、前記合成画像における単眼性手がかりが強調又は付加されるように、前記表示部による表示を制御する表示制御ステップと
を実行させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−114885(P2012−114885A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−264675(P2010−264675)
【出願日】平成22年11月29日(2010.11.29)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月29日(2010.11.29)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]