
立入禁止区域を有する埋設された公共施設のデータ

【課題】作業機の場所を特定し、かかる場所を報告された地下の公共施設の場所と比較する作業機で使用するためのシステムを提供する。
【解決手段】本体と、少なくとも一つの地下物体の場所を記述したデータを有する、本体に連結されたコンピュータシステムと、土壌を動かす能力があり、少なくとも一つの地下物体と接触する能力がある本体から延伸する器具と、本体に連結され、コンピュータシステムと通信し、コンピュータシステムが作業機の場所および作業機の配向を特定することができるようにコンピュータシステムに渡されるデータを提供する測位システムと、コンピュータシステムに電気的に連結されたメモリに記憶されたソフトウェアを備える作業機を含む。
【解決手段】本体と、少なくとも一つの地下物体の場所を記述したデータを有する、本体に連結されたコンピュータシステムと、土壌を動かす能力があり、少なくとも一つの地下物体と接触する能力がある本体から延伸する器具と、本体に連結され、コンピュータシステムと通信し、コンピュータシステムが作業機の場所および作業機の配向を特定することができるようにコンピュータシステムに渡されるデータを提供する測位システムと、コンピュータシステムに電気的に連結されたメモリに記憶されたソフトウェアを備える作業機を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は、概して地上および/または地表面の下の位置を突き止める手段を有する掘削機械に関する。より具体的には、本開示は、機械の地理的な作業場所を監視し、立入を禁止された場所との望ましくない干渉を防止する搭載ソフトウェアを有する地面の掘削機械に関する。
【背景技術】
【0002】
様々な種類の掘削機械が地下および地上の公共施設および建造物の設置、撤去および修繕に応用されている。一般的な地下公共施設は、水道本管、下水管、電気通信ライン用導管、導管無しに配備された電気通信ライン、地下道トンネル、水道トンネルなどを含む。
【0003】
電気通信ラインなど公共施設が地下設置されると、公共施設ラインが景色という視覚的な外観から取り除かれる。地下公共施設の場所は、一般的に設計技師により予め確立され、図面形式で公共施設の設置者に提供される。場所は、土壌面に対する公共施設のX−Y軸の位置だけでなく、例えば、地表下の距離または場合によっては海抜を参照した、Z軸上の位置も含む。実際には、地下公共施設の実際の場所は、岩、または岩の構成、木々、建築基礎、または設計技師には知られていない、以前に設置された公共施設により、地表面下に干渉があるため、建設前の図面に記載された場所から外れることがある。第1構造周辺にさらなる地下公共施設および構造の設置を予想し、周辺の第1地下公共設備の可能性のある修復または移設を予想し、また、その後の掘削による記されていない表面下の公共施設構造または表面下の障害物との遭遇を防止するために、技師は設置された状態の公共施設の場所および可能性のある他の表面下の障害物の記録を作成する。そのような場所は、「現況図面」として知られる図面に記録される。
【0004】
そのような「現況図面」は、「Three Dimensional Feature Location From An Excavator」という名称で2007年10月26日に出願された特許文献1、および「Three Dimensional Feature Location From An Excavator」という名称で2011年8月24日に出願されたその一部継続出願である特許文献2に開示された技術を用いて、または用いることなく作成されてよく、両出願の開示は参照により明示的に本明細書に組み込まれる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許出願公開第2009/0112472号明細書
【特許文献2】米国特許出願公開第2011/0311342号明細書
【発明の概要】
【課題を解決するための手段】
【0006】
第一実施形態によれば、本開示は、本体と、少なくとも一つの地下物体の場所を記述したデータを有する、本体に連結されたコンピュータシステムと、土壌を動かす能力があり、少なくとも一つの地下物体と接触する能力がある本体から延伸する器具と、本体に連結され、コンピュータシステムと通信し、コンピュータシステムが作業機の場所および作業機の配向を特定することができるようにコンピュータシステムに渡されるデータを提供する測位システムと、コンピュータシステムに電気的に連結されたメモリに記憶されたソフトウェアを備える作業機を含む。ソフトウェアは、コンピュータシステムにより解釈されると、少なくとも一つの地下物体の規定された近接内の区域として規定された立入禁止区域を特定するステップと、器具の動きを監視するステップと、器具の立入禁止区域内への動きを防止するステップとを実行する指示を含む。
【0007】
第二実施形態によれば、本開示は、作業機の器具と地下物体の相対位置を監視するためのコンピュータ実装システムであって、地下物体に関するデータを含む、作業場所の地図を読み出す第1の処理シーケンスと、作業機に連結された前地球測位システム装置からデータを受信する第2の処理シーケンスと、作業機の場所と配向を特定するために、全地球測位装置からのデータを使用する第3の処理シーケンスと、作業機に取付けられた器具に関するデータを読み出す第4の処理シーケンスと、器具の位置を特定する第5の処理シーケンスと、地下物体に関連付けられた立入禁止区域を記述したデータを読み出す第6の処理シーケンスと、器具の位置を立入禁止区域と比較する第7の処理シーケンスとを備含むシステムを含む。
【図面の簡単な説明】
【0008】
【図1】オフセット範囲を見出す能力を装備した掘削機を示す。
【図2】図1の掘削機のディスプレイを示す図である。
【図3】図1の掘削機に搭載されたコンピュータで実行するデータ構造の相互関係を示す図である。
【図4】立入禁止区域内への侵入を表示する図2のディスプレイを示す。
【発明の詳細な説明】
【0009】
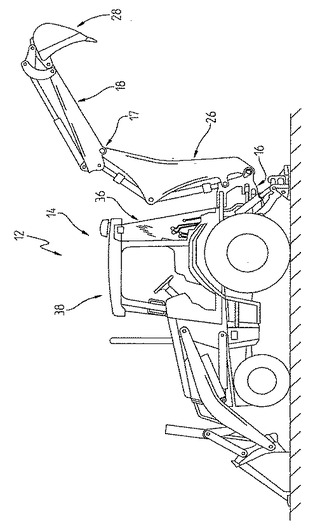
本開示は、無限軌道式の掘削機、車輪式の掘削機、およびトラクタ式のバックホーを含む掘削機械12をともなう、公共施設を見つけ出す概念を提供する。地表および地表下を整備し移動する掘削機または他の機械の場所は、全地球測位装置(GPS)30により特定することができる。GPS装置30は、地球同期衛星からの伝送を介してアンテナ14の場所を特定する。ここで、アンテナ14は機械12上に設置されており、機械の場所は、衛星の伝送を介して特定されてもよい。本開示は、掘削機械12が面する方向も、機械12の向きと共に特定することができる、マルチGPSアンテナ14を有する掘削機械12を意図する。アンテナ14は、機械12のキャブ38の上面の前方コーナーに図示的に位置付けされる。
【0010】
上述したように、地理的な作業場所に関する情報は、手動、GPS、または他の手段を採用した計測を用いて構成された作業場所図面またはファイルから取得することができる。そのような地理的な作業場所情報は、公共施設ラインなどの地下物体の配置に関する情報を含む。そのような図面は、一般的なCADフォーマットを含む任意の数の公知フォーマットに従ってフォーマット化することができる。
【0011】
掘削機械12は、作業場所のデータを入力する手段、作業場所のデータを記憶する手段、作業場所のデータを表示する手段、および作業場所のデータとやり取りする手段を含む。
【0012】
作業場所のデータを入力する手段は、掘削機械12に搭載されたコンピュータに作業場所のデータを提供することができる任意の通信装置である。本実施例では、作業場所のデータファイルをその中に有するフラッシュドライブを受信することができるUSBポート20が入力用の手段として提供される。代替的に、入力のための手段は、ユーザが作業場所のデータを打ち込むことができる、単なるキーボードである。さらに別の代替では、入力のための手段はデータをダウンロードするか、またはデータを受信する能力を持つ無線リンクである。
【0013】
次いで、掘削機械12は不揮発性メモリ24などにデータを記憶し、機械12のディスプレイ34にデータ表示を提供する。ディスプレイ34は、単にフラットスクリーン表示タブレットとして提供される。しかしながら、ディスプレイ34は、画像が投影されるか、またはキャブ38の窓36に表示されるヘッドアップ型のディスプレイである実施形態が想定される。搭載コンピュータのプログラムは、作業場所の地図に近似する視覚的な表示を提供するために、受信および記憶した作業場所のデータを解釈することができるソフトウェアを含む。かかる地図は、受信した作業場所のデータが示す種々の地下要素の場所を含む。Google Mapsまたは他の方法により取得される地図などのような航空/衛星地図を作業場所のデータに組み合わせることができる選択肢が提供され、ユーザはより簡単に地図の位置を実世界トポロジーに関連付けることができる。
【0014】
やり取りするための手段は、掘削機械12の場所に関する情報を受信し、受信および記憶した作業場所のデータと統合することを含む。一実施形態において、そのようなやり取りは、掘削機械12の場所をディスプレイ34の地図に表示する形態をとる。さらに、ブームアーム26およびバケット28などの器具の場所がディスプレイ34に表示される。以下で説明するように、そのようなやり取りは、掘削機械12の配置に制限を加えることも含む。
【0015】
上述したように、機械12上のGPSアンテナ14の場所は、掘削機械12に搭載されたソフトウェアのプログラマに知らされるか、またはユーザにより入力される。同様に、機械12の他のパーツに対するアンテナ14の相対オフセットも予め設定されるか、またはユーザにより入力されるかのいずれかによってソフトウェアに知らさる。オフセットは、GPSアンテナの場所または機械12の他の場所に対して特定された地理的物体または機械のパーツの距離、方向、配向、および深度(高度)である。オフセットがGPSにより特定された機械12の場所と組み合わせられると、物体または機械のパーツの場所は、三座標で識別することができる。関連性のあるオフセットの部分的なリストは、アンテナ14とスイングピン16との間のオフセットと、(スイングピン16とブームピン17との間のオフセットとも記載される)ブームアーム26の長さ、角度、および方向と、ディッパアーム18の長さおよび角度と、バケット28または他の採掘器具の長さ、幅、および角度とを含む。オフセットは、機械12の部分のGPS場所を特定するために使用される。特に興味があるのは、地形とやり取り可能な採掘機器の最遠端地点を提供するバケット28の端である。次いで、掘削機械12のかかる部分は、リアルタイムでディスプレイ34に表示される。追加的に、掘削機械12のバケット28が届く範囲を規定する円弧などの情報をディスプレイ34に表示することができる。
【0016】
掘削機械12は、各々が異なる大きさおよび形状を有する異なるバケット28または他の器具を採用することができ、そのため、それらに関連して異なるオフセットを作り出すことも意図されるべきである。従って、バケット28の識別情報も搭載コンピュータに提供される。バケット28の生の測定データをコンピュータに提供することができ、コンピュータは種々の一般バケット用のオフセットデータを提供する予め記憶した構成ファイルも有してもよい。同様に、他の種々の部分(ブームアーム26,ディッパアーム18など)の大きさも、コンピュータ内でその周辺が見積もられるように知らされる。異なるバケット28をコンピュータは、ユーザ入力を介して、またはディッパアーム18の端部付近に設置され(また、コンピュータと通信する)RFIDリーダ、およびバケット28に設置されたRFIDタグなどの自動手段を通して識別することができる。
【0017】
スイングピン16からバケット28の場所を確立するために、幾つかの回転軸および所望する場合はディッパアーム18の可変的な延伸の形態の線形延伸が集められる。回転の第1軸は、スイングピン16を中心として掘削機械12のテーブルを回転することによる掘削機のアーム自体の全体か、またはトラクタに搭載したバックホーの場合、バックホーを装備したトラクタ上のスイングピン16を中心とした回転ブームアーム26である。回転テーブルを用いて操作可能な掘削機の場合、実際に「スイングピン」をともなって装備されないかもしれないが、本明細書での記載のために、スイングピンがあるものとしてかかるテーブル型の掘削機が論じられる。
【0018】
テーブル型の掘削機を回転させるために、ブームアーム26およびディッパアーム18の角度を特定するデータが、ローカル測位機器からの信号の一部として提供されてもよく、または掘削機の受信機により特定されてもよい。実際のスイングピンが装備された掘削機では、スイングピンの回転エンコーダは、ブームアーム26の方向角θを特定するため搭載コンピュータにデータを提供する。各回転軸の半径方向配向は回転エンコーダにより測定されてもよい。個々の掘削機械12のために適切なアルゴリズムと組み合わせると、コンピュータはディッパアームの配向と、(実際または仮想の)スイングピン16に対するバケット28の距離とを特定することができる。
【0019】
ディッパ延伸部(不図示)を装備した掘削機については、線形エンコーダおよび適切なアルゴリズムが、そのように装備された掘削機のバケット28の位置を算出するために必要な追加データをコンピュータに提供する。
【0020】
掘削機の作業環境は不均一な地形を含む場合がある。掘削機の本体は、掘削機のピッチおよびロールが水平および垂直から外れるように配向される場合がある。ピッチおよびロールの測定は、掘削機のキャブに搭載されたアンテナ14の場所、または掘削機のメインフレームに強固に接続された掘削機の「スイングピン」のピッチおよびロールのそれぞれについてコンピュータにデータを提供するトラクタまたは掘削機のフレームのどこかの場所の差異を通知することにより特定される。同様の方法で、掘削機の追跡に影響を及ぼすピッチおよびロールは、剛性フレームと、ブーム26およびディッパアーム18とを介して掘削機12のバケット28に移される。しかしながら、種々の傾斜計および他のセンサもこの情報を提供することができる。上述したもの全てが、バケット28を含むが、これに限定されない掘削機械12の場所に関する情報を提供する役割を果たす。この情報は、掘削機械12が設置された作業場所のリアルタイムでのインタラクテティブな提示を提供するためコンピュータ内のマッピング情報と組み合わせられる。そのようなマッピング情報は、作業場所の種々の物体と作業場所の物体に対する掘削機械12のパーツの相対関係位置についてユーザに情報を与える。そのようなマッピング情報は、作業場所における機械12の関連空間と、作業場所および作業場所の物体に関連した立入禁止区域(以下を参照)の物体の視覚的な状況によるレンダリングを提供する。
【0021】
作業場所の物体(木々、建設物、地下公共施設)の位置を通知するとともに、そのような物体は、セットバックまたは「立入禁止区域」と関連付けることもできる。そのような立入禁止区域は、例えば、バケット28がガスラインの5フィート内に入ろうとすることを許可するという、コンピュータに対する指示という形態をとる。セットバックまたは「立入禁止区域」は、作業毎にカスタマイズすることができ、または類似する作業場所の物体に対して、作業にわたって一定にすることができる。これらのデータを全て合成するコンピュータは、同一のコンピュータであるか、または掘削機械12の種々のパーツの動きを制御するコンピュータに連携される。従って、掘削機械12の動きは、そのような動きにより掘削機械12のパーツが立入禁止区域100内に入る場合(立入禁止区域100への侵入)に停止させることができる。そのような停止は、少なくとも2つの種類のうち、いずれかとすることができる。1つ目の種類は、完全停止である。そのような実施形態では、立入禁止区域への侵入は完全に禁止される。掘削機械12の動きを許可しないことで立入禁止区域へ侵入しないことになる。2つ目の種類は警告である。立入禁止区域に侵入する恐れのある動きは、動きの停止、およびディスプレイ34へのメッセージなど、ある種の通知に適合する。メッセージに追加して、ユーザが立入禁止区域をオーバーライドすることができる選択肢が提供される。そのようなオーバーライドは、一度だけのオーバーライド、特定の立入禁止区域の一部分に特定した永続的オーバーライド、物体全体に対するオーバーライド、または別の方法とすることができる。そのため、警告はユーザに、ユーザは注意度を高めて進めるように注意を提供することになる。実施形態は、停止を引き起こさずに、むしろ音声による警告のみ、視覚的な警告のみ、またはその両方をユーザに示すことも想定される。追加的に、停止は即座とする必要はないが、停止するように衝突しつつある部材を段階的に減速させることができる。
【0022】
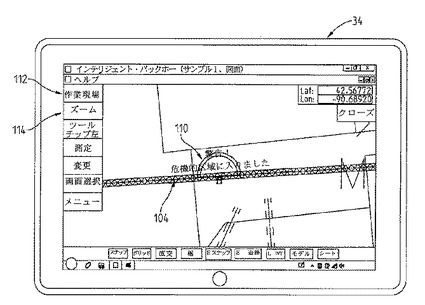
図4は、掘削における、突き止められた地下物体を示す。コンピュータは、言葉や色など適切な記載または表記を用いて物体の識別情報を提供する。コンピュータのソフトウェアは、提供された作業場所のデータを解釈し、図4の地図をディスプレイ34に提供する。一例として、建設物は黄色線50で示すことができ、ガスラインを赤線60で示し、水道ラインを橙色70で示し、電線を紫色80で示し、下水管など他の物体90を青や白など他の色で示すことができる。公共施設ラインは、それらが占めるライン/導管の直径に基づいてさらに区別することができる(すなわち、下水本管とサービスラインとは違う色で色づけることができる)。同様に、木々および低木などのような他の地上の物体の公知である場所も示すことができる。これらを有する各物体について、コンピュータ/ディスプレイ34は、立入禁止区域100の視覚的な表示も提供する。立入禁止区域100は、点線102およびシェーディング104を使用して図示的に表示される。点線102は、立入禁止区域100の端を標識するために使用される。シェーディング104は、点線102間に提供される。図示的に、シェーディング104は、立入禁止区域100が侵される場合に点線102間に提供される。また、立入禁止区域の侵害が、他の事業体に侵略について通知するEメールを生成する実施形態も想定される。
【0023】
図4は、機械12の提示も示す。機械12の主本体の提示を示すことに追加して、機械12の一端に半円形領域110も提供される。半円形領域110は、機械12に取り付けられた器具(バケット28など)が可能な移動範囲を提示する。
【0024】
ディスプレイ34は図示的にタッチスクリーンであり、従って、画面は複数のコマンド/入力/情報用ボタンを提供する。かかるボタンは視認されている状況を与える情報用ボタン112を含む。情報用ボタン112の例は、作業現場全体が表示されているか、または作業場所が表示されているか(ここで、作業場所は「作業現場」より小さく、「作業現場」に関連する機械12に対してより局所的である)を示すボタンである。コマンドボタン114は、「ズーム」および「パン」を含む。ズームボタンは、作業現場ビューを作業場所ビューに拡大することができる。同様に、縮小することも可能である。パンボタンは、ディスプレイ34の画面にわたって地図を平行移動させることができる。また、コマンドボタン114は、ファイルの読み込み、保存、インポート、エクスポートに関する種々の機能を含む。追加的に、データを収集し、「Three Dimensional Feature Location From An Excavator」という名称で2011年8月24日に同一出願人による特許文献2に記載された「現況」図面を作成するために使用されるボタンが提供される。さらに、種々の公共施設の種類に対する、立入禁止区域100の大きさに関する表示特徴のカスタマイズおよび設定のカスタマイズが可能な別のボタンが提供される。設定および測定(バケット28の寸法など)を入力および調節することができる画面にアクセス可能な追加的なボタンが提供される。
【0025】
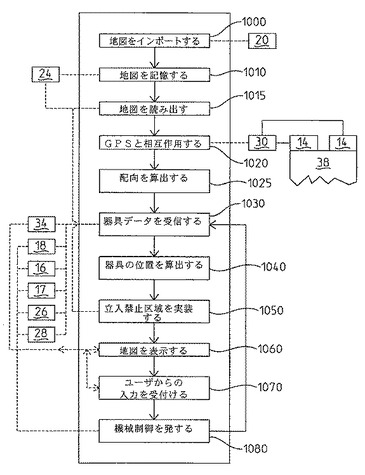
従って、機械12に搭載されたコンピュータで実行するソフトウェアが、複数のデータ構造を備えることが理解されるべきである。そのようなデータ構造は、地図データをインポートし1000、地図データを記憶し1010、地図データを読み出し1015、GPS装置と相互作用し1020、機械の配向を算出し1025、器具の相対位置データを受信し1030、器具の絶対的な位置データを算出し1040、立入禁止区域を実装し1050、地図および位置決めデータを表示し1060、ユーザ入力を受付け1070、機械制御信号を発する1080ためのデータ構造を備える。
【0026】
地図データをインポートするデータ構造1000は、地図データを取得するため、USBポート20(または他の類似インタフェース)と相互作用する。このデータは、地図データを記憶するためのデータ構造1010に渡される。構造1010は、地図データを記憶するためにメモリ24と相互作用する。地図データを読み出すためのデータ構造1015は、予め記憶された地図データを読み出すためにメモリ24と相互作用する。GPS装置と相互作用するためのデータ構造1020は、アンテナ14のGPS座標を取得するために(複数のアンテナと通信する)GPS装置30と通信する。機械の配向を算出するデータ構造1025は、取得したGPS座標を用いて機械12の位置を特定するとともに機械12の配向を特定するために各アンテナ14からのGPSの読みと比較する。器具に関する位置データを受信するデータ構造1030は、使用される特定の器具(または、代替的にRFIDリーダなど器具の別のインジケータを用いて)に関する任意のユーザ入力データのためにディスプレイ34と相互作用する。構造1030は、ディッパアーム18,スイングピン16,ブームピン17,ブームアーム26、およびバケット28を監視するセンサとも相互作用する。各々のセンサは、アンテナ14に対する各部分16、17、18、26、28の相対位置を算出することができる。次いで、この相対位置データは構造1040に渡される。器具の絶対的な位置データを算出する構造1040は、構造1030からの相対位置データを用いて、GPS位置と構造1025からの配向データとを組み合わせて、各部分16、17、18、26、28が存在する物理空間を特定する。
【0027】
立入禁止区域を実装する構造1050は、構造1015から読み出された地図データを用い、立入禁止区域の設定についてメモリ24からデータを読み出す。次いで、構造1050は、地図データに対する立入禁止ルールを適用する。立入禁止区域データは、地図データと共に構造1060に渡される。
【0028】
地図および位置データを表示する構造1060は、渡されたデータを用いてディスプレイ34に統合されたデータセットを提示する。ユーザ入力を受付ける構造1070により、ユーザはディスプレイ34とやり取りして、表示された地図を変更し、また、別の方法で、他のデータ構造(立入禁止区域をオーバーライドするか、または別の方法で、新規地図特徴を作成することができるデータ構造など)を開始することができる。構造1070は、(部分16、17、18、26、28の動きを含む)機械12の所望の動きに関する入力も受付ける。動きコマンドに関する入力は構造1080に渡される。
【0029】
機械制御信号を発する構造1080は、渡された動きコマンドを用いて、動きコマンドデータを立入禁止区域と比較する。構造1080が、動きコマンドが立入禁止区域を侵さないであろうと判断した場合、動きコマンドは、実際に動きを実行する他のシステムに渡される。構造1080が、動きコマンドが、立入禁止区域が侵されるであろうと判断した場合、構造1080は、動きコマンドを移動システムに渡さない。むしろ、構造1080は、要求された機械12の動きと相互作用する立入禁止区域について、警告をディスプレイ34に表示させる。
【0030】
構造1080から動きコマンドが渡されると、そのような動きは、器具28とGPSアンテナ14の関係場所のいずれかに影響を与えるか、またはGPSアンテナ14の場所に影響を与える。どちらにしても、器具の絶対的な位置を特定する計算が繰り返される。理解されるように、多くの構造が反復する方法で実行され、ディスプレイ34の地図は常時再描画され、機械12およびそのパーツの位置は常時再評価される。このようにして、作業場所内の機械12のリアルタイム表現がディスプレイ34に提示される。同様に、正確な相互作用をそれらの間に提供するため、機械12および立入禁止区域100の相対位置は常時更新される。
【0031】
本出願は、衛星によるGPSの使用を論じたが、概念は、ローカル測位ステーション、および他の公知の類似手段を用いて使用することも可能である。同様に、本明細書で記載した実用性および利益性だけでなく、当業者による改良および適応は、特許請求されるように、本発明の精神および範囲から逸脱することなく具体的な使用に本発明を適合する場合がある。
【技術分野】
【0001】
本開示は、概して地上および/または地表面の下の位置を突き止める手段を有する掘削機械に関する。より具体的には、本開示は、機械の地理的な作業場所を監視し、立入を禁止された場所との望ましくない干渉を防止する搭載ソフトウェアを有する地面の掘削機械に関する。
【背景技術】
【0002】
様々な種類の掘削機械が地下および地上の公共施設および建造物の設置、撤去および修繕に応用されている。一般的な地下公共施設は、水道本管、下水管、電気通信ライン用導管、導管無しに配備された電気通信ライン、地下道トンネル、水道トンネルなどを含む。
【0003】
電気通信ラインなど公共施設が地下設置されると、公共施設ラインが景色という視覚的な外観から取り除かれる。地下公共施設の場所は、一般的に設計技師により予め確立され、図面形式で公共施設の設置者に提供される。場所は、土壌面に対する公共施設のX−Y軸の位置だけでなく、例えば、地表下の距離または場合によっては海抜を参照した、Z軸上の位置も含む。実際には、地下公共施設の実際の場所は、岩、または岩の構成、木々、建築基礎、または設計技師には知られていない、以前に設置された公共施設により、地表面下に干渉があるため、建設前の図面に記載された場所から外れることがある。第1構造周辺にさらなる地下公共施設および構造の設置を予想し、周辺の第1地下公共設備の可能性のある修復または移設を予想し、また、その後の掘削による記されていない表面下の公共施設構造または表面下の障害物との遭遇を防止するために、技師は設置された状態の公共施設の場所および可能性のある他の表面下の障害物の記録を作成する。そのような場所は、「現況図面」として知られる図面に記録される。
【0004】
そのような「現況図面」は、「Three Dimensional Feature Location From An Excavator」という名称で2007年10月26日に出願された特許文献1、および「Three Dimensional Feature Location From An Excavator」という名称で2011年8月24日に出願されたその一部継続出願である特許文献2に開示された技術を用いて、または用いることなく作成されてよく、両出願の開示は参照により明示的に本明細書に組み込まれる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許出願公開第2009/0112472号明細書
【特許文献2】米国特許出願公開第2011/0311342号明細書
【発明の概要】
【課題を解決するための手段】
【0006】
第一実施形態によれば、本開示は、本体と、少なくとも一つの地下物体の場所を記述したデータを有する、本体に連結されたコンピュータシステムと、土壌を動かす能力があり、少なくとも一つの地下物体と接触する能力がある本体から延伸する器具と、本体に連結され、コンピュータシステムと通信し、コンピュータシステムが作業機の場所および作業機の配向を特定することができるようにコンピュータシステムに渡されるデータを提供する測位システムと、コンピュータシステムに電気的に連結されたメモリに記憶されたソフトウェアを備える作業機を含む。ソフトウェアは、コンピュータシステムにより解釈されると、少なくとも一つの地下物体の規定された近接内の区域として規定された立入禁止区域を特定するステップと、器具の動きを監視するステップと、器具の立入禁止区域内への動きを防止するステップとを実行する指示を含む。
【0007】
第二実施形態によれば、本開示は、作業機の器具と地下物体の相対位置を監視するためのコンピュータ実装システムであって、地下物体に関するデータを含む、作業場所の地図を読み出す第1の処理シーケンスと、作業機に連結された前地球測位システム装置からデータを受信する第2の処理シーケンスと、作業機の場所と配向を特定するために、全地球測位装置からのデータを使用する第3の処理シーケンスと、作業機に取付けられた器具に関するデータを読み出す第4の処理シーケンスと、器具の位置を特定する第5の処理シーケンスと、地下物体に関連付けられた立入禁止区域を記述したデータを読み出す第6の処理シーケンスと、器具の位置を立入禁止区域と比較する第7の処理シーケンスとを備含むシステムを含む。
【図面の簡単な説明】
【0008】
【図1】オフセット範囲を見出す能力を装備した掘削機を示す。
【図2】図1の掘削機のディスプレイを示す図である。
【図3】図1の掘削機に搭載されたコンピュータで実行するデータ構造の相互関係を示す図である。
【図4】立入禁止区域内への侵入を表示する図2のディスプレイを示す。
【発明の詳細な説明】
【0009】
本開示は、無限軌道式の掘削機、車輪式の掘削機、およびトラクタ式のバックホーを含む掘削機械12をともなう、公共施設を見つけ出す概念を提供する。地表および地表下を整備し移動する掘削機または他の機械の場所は、全地球測位装置(GPS)30により特定することができる。GPS装置30は、地球同期衛星からの伝送を介してアンテナ14の場所を特定する。ここで、アンテナ14は機械12上に設置されており、機械の場所は、衛星の伝送を介して特定されてもよい。本開示は、掘削機械12が面する方向も、機械12の向きと共に特定することができる、マルチGPSアンテナ14を有する掘削機械12を意図する。アンテナ14は、機械12のキャブ38の上面の前方コーナーに図示的に位置付けされる。
【0010】
上述したように、地理的な作業場所に関する情報は、手動、GPS、または他の手段を採用した計測を用いて構成された作業場所図面またはファイルから取得することができる。そのような地理的な作業場所情報は、公共施設ラインなどの地下物体の配置に関する情報を含む。そのような図面は、一般的なCADフォーマットを含む任意の数の公知フォーマットに従ってフォーマット化することができる。
【0011】
掘削機械12は、作業場所のデータを入力する手段、作業場所のデータを記憶する手段、作業場所のデータを表示する手段、および作業場所のデータとやり取りする手段を含む。
【0012】
作業場所のデータを入力する手段は、掘削機械12に搭載されたコンピュータに作業場所のデータを提供することができる任意の通信装置である。本実施例では、作業場所のデータファイルをその中に有するフラッシュドライブを受信することができるUSBポート20が入力用の手段として提供される。代替的に、入力のための手段は、ユーザが作業場所のデータを打ち込むことができる、単なるキーボードである。さらに別の代替では、入力のための手段はデータをダウンロードするか、またはデータを受信する能力を持つ無線リンクである。
【0013】
次いで、掘削機械12は不揮発性メモリ24などにデータを記憶し、機械12のディスプレイ34にデータ表示を提供する。ディスプレイ34は、単にフラットスクリーン表示タブレットとして提供される。しかしながら、ディスプレイ34は、画像が投影されるか、またはキャブ38の窓36に表示されるヘッドアップ型のディスプレイである実施形態が想定される。搭載コンピュータのプログラムは、作業場所の地図に近似する視覚的な表示を提供するために、受信および記憶した作業場所のデータを解釈することができるソフトウェアを含む。かかる地図は、受信した作業場所のデータが示す種々の地下要素の場所を含む。Google Mapsまたは他の方法により取得される地図などのような航空/衛星地図を作業場所のデータに組み合わせることができる選択肢が提供され、ユーザはより簡単に地図の位置を実世界トポロジーに関連付けることができる。
【0014】
やり取りするための手段は、掘削機械12の場所に関する情報を受信し、受信および記憶した作業場所のデータと統合することを含む。一実施形態において、そのようなやり取りは、掘削機械12の場所をディスプレイ34の地図に表示する形態をとる。さらに、ブームアーム26およびバケット28などの器具の場所がディスプレイ34に表示される。以下で説明するように、そのようなやり取りは、掘削機械12の配置に制限を加えることも含む。
【0015】
上述したように、機械12上のGPSアンテナ14の場所は、掘削機械12に搭載されたソフトウェアのプログラマに知らされるか、またはユーザにより入力される。同様に、機械12の他のパーツに対するアンテナ14の相対オフセットも予め設定されるか、またはユーザにより入力されるかのいずれかによってソフトウェアに知らさる。オフセットは、GPSアンテナの場所または機械12の他の場所に対して特定された地理的物体または機械のパーツの距離、方向、配向、および深度(高度)である。オフセットがGPSにより特定された機械12の場所と組み合わせられると、物体または機械のパーツの場所は、三座標で識別することができる。関連性のあるオフセットの部分的なリストは、アンテナ14とスイングピン16との間のオフセットと、(スイングピン16とブームピン17との間のオフセットとも記載される)ブームアーム26の長さ、角度、および方向と、ディッパアーム18の長さおよび角度と、バケット28または他の採掘器具の長さ、幅、および角度とを含む。オフセットは、機械12の部分のGPS場所を特定するために使用される。特に興味があるのは、地形とやり取り可能な採掘機器の最遠端地点を提供するバケット28の端である。次いで、掘削機械12のかかる部分は、リアルタイムでディスプレイ34に表示される。追加的に、掘削機械12のバケット28が届く範囲を規定する円弧などの情報をディスプレイ34に表示することができる。
【0016】
掘削機械12は、各々が異なる大きさおよび形状を有する異なるバケット28または他の器具を採用することができ、そのため、それらに関連して異なるオフセットを作り出すことも意図されるべきである。従って、バケット28の識別情報も搭載コンピュータに提供される。バケット28の生の測定データをコンピュータに提供することができ、コンピュータは種々の一般バケット用のオフセットデータを提供する予め記憶した構成ファイルも有してもよい。同様に、他の種々の部分(ブームアーム26,ディッパアーム18など)の大きさも、コンピュータ内でその周辺が見積もられるように知らされる。異なるバケット28をコンピュータは、ユーザ入力を介して、またはディッパアーム18の端部付近に設置され(また、コンピュータと通信する)RFIDリーダ、およびバケット28に設置されたRFIDタグなどの自動手段を通して識別することができる。
【0017】
スイングピン16からバケット28の場所を確立するために、幾つかの回転軸および所望する場合はディッパアーム18の可変的な延伸の形態の線形延伸が集められる。回転の第1軸は、スイングピン16を中心として掘削機械12のテーブルを回転することによる掘削機のアーム自体の全体か、またはトラクタに搭載したバックホーの場合、バックホーを装備したトラクタ上のスイングピン16を中心とした回転ブームアーム26である。回転テーブルを用いて操作可能な掘削機の場合、実際に「スイングピン」をともなって装備されないかもしれないが、本明細書での記載のために、スイングピンがあるものとしてかかるテーブル型の掘削機が論じられる。
【0018】
テーブル型の掘削機を回転させるために、ブームアーム26およびディッパアーム18の角度を特定するデータが、ローカル測位機器からの信号の一部として提供されてもよく、または掘削機の受信機により特定されてもよい。実際のスイングピンが装備された掘削機では、スイングピンの回転エンコーダは、ブームアーム26の方向角θを特定するため搭載コンピュータにデータを提供する。各回転軸の半径方向配向は回転エンコーダにより測定されてもよい。個々の掘削機械12のために適切なアルゴリズムと組み合わせると、コンピュータはディッパアームの配向と、(実際または仮想の)スイングピン16に対するバケット28の距離とを特定することができる。
【0019】
ディッパ延伸部(不図示)を装備した掘削機については、線形エンコーダおよび適切なアルゴリズムが、そのように装備された掘削機のバケット28の位置を算出するために必要な追加データをコンピュータに提供する。
【0020】
掘削機の作業環境は不均一な地形を含む場合がある。掘削機の本体は、掘削機のピッチおよびロールが水平および垂直から外れるように配向される場合がある。ピッチおよびロールの測定は、掘削機のキャブに搭載されたアンテナ14の場所、または掘削機のメインフレームに強固に接続された掘削機の「スイングピン」のピッチおよびロールのそれぞれについてコンピュータにデータを提供するトラクタまたは掘削機のフレームのどこかの場所の差異を通知することにより特定される。同様の方法で、掘削機の追跡に影響を及ぼすピッチおよびロールは、剛性フレームと、ブーム26およびディッパアーム18とを介して掘削機12のバケット28に移される。しかしながら、種々の傾斜計および他のセンサもこの情報を提供することができる。上述したもの全てが、バケット28を含むが、これに限定されない掘削機械12の場所に関する情報を提供する役割を果たす。この情報は、掘削機械12が設置された作業場所のリアルタイムでのインタラクテティブな提示を提供するためコンピュータ内のマッピング情報と組み合わせられる。そのようなマッピング情報は、作業場所の種々の物体と作業場所の物体に対する掘削機械12のパーツの相対関係位置についてユーザに情報を与える。そのようなマッピング情報は、作業場所における機械12の関連空間と、作業場所および作業場所の物体に関連した立入禁止区域(以下を参照)の物体の視覚的な状況によるレンダリングを提供する。
【0021】
作業場所の物体(木々、建設物、地下公共施設)の位置を通知するとともに、そのような物体は、セットバックまたは「立入禁止区域」と関連付けることもできる。そのような立入禁止区域は、例えば、バケット28がガスラインの5フィート内に入ろうとすることを許可するという、コンピュータに対する指示という形態をとる。セットバックまたは「立入禁止区域」は、作業毎にカスタマイズすることができ、または類似する作業場所の物体に対して、作業にわたって一定にすることができる。これらのデータを全て合成するコンピュータは、同一のコンピュータであるか、または掘削機械12の種々のパーツの動きを制御するコンピュータに連携される。従って、掘削機械12の動きは、そのような動きにより掘削機械12のパーツが立入禁止区域100内に入る場合(立入禁止区域100への侵入)に停止させることができる。そのような停止は、少なくとも2つの種類のうち、いずれかとすることができる。1つ目の種類は、完全停止である。そのような実施形態では、立入禁止区域への侵入は完全に禁止される。掘削機械12の動きを許可しないことで立入禁止区域へ侵入しないことになる。2つ目の種類は警告である。立入禁止区域に侵入する恐れのある動きは、動きの停止、およびディスプレイ34へのメッセージなど、ある種の通知に適合する。メッセージに追加して、ユーザが立入禁止区域をオーバーライドすることができる選択肢が提供される。そのようなオーバーライドは、一度だけのオーバーライド、特定の立入禁止区域の一部分に特定した永続的オーバーライド、物体全体に対するオーバーライド、または別の方法とすることができる。そのため、警告はユーザに、ユーザは注意度を高めて進めるように注意を提供することになる。実施形態は、停止を引き起こさずに、むしろ音声による警告のみ、視覚的な警告のみ、またはその両方をユーザに示すことも想定される。追加的に、停止は即座とする必要はないが、停止するように衝突しつつある部材を段階的に減速させることができる。
【0022】
図4は、掘削における、突き止められた地下物体を示す。コンピュータは、言葉や色など適切な記載または表記を用いて物体の識別情報を提供する。コンピュータのソフトウェアは、提供された作業場所のデータを解釈し、図4の地図をディスプレイ34に提供する。一例として、建設物は黄色線50で示すことができ、ガスラインを赤線60で示し、水道ラインを橙色70で示し、電線を紫色80で示し、下水管など他の物体90を青や白など他の色で示すことができる。公共施設ラインは、それらが占めるライン/導管の直径に基づいてさらに区別することができる(すなわち、下水本管とサービスラインとは違う色で色づけることができる)。同様に、木々および低木などのような他の地上の物体の公知である場所も示すことができる。これらを有する各物体について、コンピュータ/ディスプレイ34は、立入禁止区域100の視覚的な表示も提供する。立入禁止区域100は、点線102およびシェーディング104を使用して図示的に表示される。点線102は、立入禁止区域100の端を標識するために使用される。シェーディング104は、点線102間に提供される。図示的に、シェーディング104は、立入禁止区域100が侵される場合に点線102間に提供される。また、立入禁止区域の侵害が、他の事業体に侵略について通知するEメールを生成する実施形態も想定される。
【0023】
図4は、機械12の提示も示す。機械12の主本体の提示を示すことに追加して、機械12の一端に半円形領域110も提供される。半円形領域110は、機械12に取り付けられた器具(バケット28など)が可能な移動範囲を提示する。
【0024】
ディスプレイ34は図示的にタッチスクリーンであり、従って、画面は複数のコマンド/入力/情報用ボタンを提供する。かかるボタンは視認されている状況を与える情報用ボタン112を含む。情報用ボタン112の例は、作業現場全体が表示されているか、または作業場所が表示されているか(ここで、作業場所は「作業現場」より小さく、「作業現場」に関連する機械12に対してより局所的である)を示すボタンである。コマンドボタン114は、「ズーム」および「パン」を含む。ズームボタンは、作業現場ビューを作業場所ビューに拡大することができる。同様に、縮小することも可能である。パンボタンは、ディスプレイ34の画面にわたって地図を平行移動させることができる。また、コマンドボタン114は、ファイルの読み込み、保存、インポート、エクスポートに関する種々の機能を含む。追加的に、データを収集し、「Three Dimensional Feature Location From An Excavator」という名称で2011年8月24日に同一出願人による特許文献2に記載された「現況」図面を作成するために使用されるボタンが提供される。さらに、種々の公共施設の種類に対する、立入禁止区域100の大きさに関する表示特徴のカスタマイズおよび設定のカスタマイズが可能な別のボタンが提供される。設定および測定(バケット28の寸法など)を入力および調節することができる画面にアクセス可能な追加的なボタンが提供される。
【0025】
従って、機械12に搭載されたコンピュータで実行するソフトウェアが、複数のデータ構造を備えることが理解されるべきである。そのようなデータ構造は、地図データをインポートし1000、地図データを記憶し1010、地図データを読み出し1015、GPS装置と相互作用し1020、機械の配向を算出し1025、器具の相対位置データを受信し1030、器具の絶対的な位置データを算出し1040、立入禁止区域を実装し1050、地図および位置決めデータを表示し1060、ユーザ入力を受付け1070、機械制御信号を発する1080ためのデータ構造を備える。
【0026】
地図データをインポートするデータ構造1000は、地図データを取得するため、USBポート20(または他の類似インタフェース)と相互作用する。このデータは、地図データを記憶するためのデータ構造1010に渡される。構造1010は、地図データを記憶するためにメモリ24と相互作用する。地図データを読み出すためのデータ構造1015は、予め記憶された地図データを読み出すためにメモリ24と相互作用する。GPS装置と相互作用するためのデータ構造1020は、アンテナ14のGPS座標を取得するために(複数のアンテナと通信する)GPS装置30と通信する。機械の配向を算出するデータ構造1025は、取得したGPS座標を用いて機械12の位置を特定するとともに機械12の配向を特定するために各アンテナ14からのGPSの読みと比較する。器具に関する位置データを受信するデータ構造1030は、使用される特定の器具(または、代替的にRFIDリーダなど器具の別のインジケータを用いて)に関する任意のユーザ入力データのためにディスプレイ34と相互作用する。構造1030は、ディッパアーム18,スイングピン16,ブームピン17,ブームアーム26、およびバケット28を監視するセンサとも相互作用する。各々のセンサは、アンテナ14に対する各部分16、17、18、26、28の相対位置を算出することができる。次いで、この相対位置データは構造1040に渡される。器具の絶対的な位置データを算出する構造1040は、構造1030からの相対位置データを用いて、GPS位置と構造1025からの配向データとを組み合わせて、各部分16、17、18、26、28が存在する物理空間を特定する。
【0027】
立入禁止区域を実装する構造1050は、構造1015から読み出された地図データを用い、立入禁止区域の設定についてメモリ24からデータを読み出す。次いで、構造1050は、地図データに対する立入禁止ルールを適用する。立入禁止区域データは、地図データと共に構造1060に渡される。
【0028】
地図および位置データを表示する構造1060は、渡されたデータを用いてディスプレイ34に統合されたデータセットを提示する。ユーザ入力を受付ける構造1070により、ユーザはディスプレイ34とやり取りして、表示された地図を変更し、また、別の方法で、他のデータ構造(立入禁止区域をオーバーライドするか、または別の方法で、新規地図特徴を作成することができるデータ構造など)を開始することができる。構造1070は、(部分16、17、18、26、28の動きを含む)機械12の所望の動きに関する入力も受付ける。動きコマンドに関する入力は構造1080に渡される。
【0029】
機械制御信号を発する構造1080は、渡された動きコマンドを用いて、動きコマンドデータを立入禁止区域と比較する。構造1080が、動きコマンドが立入禁止区域を侵さないであろうと判断した場合、動きコマンドは、実際に動きを実行する他のシステムに渡される。構造1080が、動きコマンドが、立入禁止区域が侵されるであろうと判断した場合、構造1080は、動きコマンドを移動システムに渡さない。むしろ、構造1080は、要求された機械12の動きと相互作用する立入禁止区域について、警告をディスプレイ34に表示させる。
【0030】
構造1080から動きコマンドが渡されると、そのような動きは、器具28とGPSアンテナ14の関係場所のいずれかに影響を与えるか、またはGPSアンテナ14の場所に影響を与える。どちらにしても、器具の絶対的な位置を特定する計算が繰り返される。理解されるように、多くの構造が反復する方法で実行され、ディスプレイ34の地図は常時再描画され、機械12およびそのパーツの位置は常時再評価される。このようにして、作業場所内の機械12のリアルタイム表現がディスプレイ34に提示される。同様に、正確な相互作用をそれらの間に提供するため、機械12および立入禁止区域100の相対位置は常時更新される。
【0031】
本出願は、衛星によるGPSの使用を論じたが、概念は、ローカル測位ステーション、および他の公知の類似手段を用いて使用することも可能である。同様に、本明細書で記載した実用性および利益性だけでなく、当業者による改良および適応は、特許請求されるように、本発明の精神および範囲から逸脱することなく具体的な使用に本発明を適合する場合がある。
【特許請求の範囲】
【請求項1】
本体と、
少なくとも一つの地下物体の場所を記述するデータを有する、前記本体に連結されたコンピュータシステムと、
土壌を動かす能力があり、前記少なくとも一つの地下物体と接触する能力がある前記本体から延伸する器具と、
前記本体と連結され、前記コンピュータシステムと通信し、前記コンピュータシステムが前記作業機の場所、および前記作業機の配向を特定することができるように前記コンピュータシステムに渡されるデータを提供する測位システムと、
前記コンピュータシステムに電気的に連結されたメモリに記憶されたソフトウェアであって、前記コンピュータシステムによって解釈されると、
前記少なくとも一つの地下物体の規定された近接内の区域として規定された立入禁止区域を特定するステップ、
前記器具の動きを監視するステップ、および
前記器具の動きの要求が前記器具を前記立入禁止区域内に移すことになる時期を特定するステップ、
を実行する指示を含むソフトウェアと、
を備える作業機。
【請求項2】
前記コンピュータシステムに連結され、前記器具の位置を記述したデータを前記コンピュータシステムに提供する少なくとも一つのセンサをさらに含む、請求項1に記載の作業機。
【請求項3】
前記少なくとも一つのセンサは、前記作業機の関節点に設置された複数のセンサを含む、請求項2に記載の作業機。
【請求項4】
前記測位システムからのデータと組み合わされた前記複数のセンサからのデータは、ディスプレイが前記器具の位置を表示できるように前記ディスプレイに入力を提供する、請求項3に記載の作業機。
【請求項5】
前記作業機のユーザが視認可能であり、作業場所、および前記作業場所内の作業機に関する位置の地図を表示する、ディスプレイをさらに備える、請求項1に記載の作業機。
【請求項6】
前記ディスプレイは、前記立入禁止区域の視覚的な指示をさらに提供する、請求項5に記載の作業機。
【請求項7】
前記作業機の位置は、反復し更新され、前記作業機のリアルタイム表現と前記作業場所内における前記作業機の相対位置を提供する、請求項5に記載の作業機。
【請求項8】
前記ディスプレイは、タブレット型コンピュータ装置の一部である、請求項5に記載の作業機。
【請求項9】
前記ソフトウェアは、前記コンピュータシステムに解釈されると、前記立入禁止区域内に入る前記器具の動きを防止するステップを行う指示を追加的に含む、請求項1に記載の作業機。
【請求項10】
前記立入禁止区域の大きさは、前記作業機の前記ユーザによりカスタマイズ可能である、請求項1に記載の作業機。
【請求項11】
前記立入禁止区域の大きさは、前記立入禁止区域がその周りに設置される物体に従ってカスタマイズ可能である、請求項1に記載の作業機。
【請求項12】
作業機の器具と地下物体との相対位置を監視するためのコンピュータ実装システムであって、
地下物体に関するデータを含む、作業場所の地図を読み出す第1の処理シーケンスと、
前記作業機に連結された全地球測位システム装置からデータを受信する第2の処理シーケンスと、
前記作業機の場所と配向とを特定するために、前記全地球測位装置からのデータを使用する第3の処理シーケンスと、
前記作業機に取付けられた器具に関するデータを読み出す第4の処理シーケンスと、
前記器具の位置を特定する第5の処理シーケンスと、
前記地下物体に関連付けられた立入禁止区域を記述するデータを読み出す第6の処理シーケンスと、
前記器具の位置を前記立入禁止区域と比較する第7の処理シーケンスと、
を備えるシステム。
【請求項13】
前記地図データをディスプレイに表示する第8の処理シーケンスをさらに備える請求項12に記載のシステム。
【請求項14】
前記第8の処理シーケンスは、前記ディスプレイに表示された前記地図上に前記作業機および前記立入禁止区域を表現することをさらに含む、請求項13に記載のシステム。
【請求項15】
前記作業機は、前記第2の処理シーケンスから受信したデータに従って前記ディスプレイ上に表示される、請求項14に記載のシステム。
【請求項16】
第1の位置から第2の位置への所望する前記作業機の動きを示すデータを受信する第9の処理シーケンスをさらに含む、請求項12に記載のシステム。
【請求項17】
前記第2の位置を前記立入禁止区域と比較する第10の処理シーケンスをさらに含む請求項16に記載のシステム。
【請求項18】
前記第10の処理シーケンスは、前記第2の位置が前記立入禁止区域内である場合に、前記第2の位置への前記作業機の動きを防止するステップをさらに含む、請求項17に記載のシステム。
【請求項19】
前記第4の処理シーケンスは、取り外し可能な前記器具の寸法を記述するデータを読み出すことを含む、請求項12に記載のシステム。
【請求項20】
前記第4の処理シーケンスは、全地球測位システムのデータ源と前記器具との間に配置された少なくとも一つの連携の位置に関するデータを受信することを含む、請求項12に記載のシステム。
【請求項1】
本体と、
少なくとも一つの地下物体の場所を記述するデータを有する、前記本体に連結されたコンピュータシステムと、
土壌を動かす能力があり、前記少なくとも一つの地下物体と接触する能力がある前記本体から延伸する器具と、
前記本体と連結され、前記コンピュータシステムと通信し、前記コンピュータシステムが前記作業機の場所、および前記作業機の配向を特定することができるように前記コンピュータシステムに渡されるデータを提供する測位システムと、
前記コンピュータシステムに電気的に連結されたメモリに記憶されたソフトウェアであって、前記コンピュータシステムによって解釈されると、
前記少なくとも一つの地下物体の規定された近接内の区域として規定された立入禁止区域を特定するステップ、
前記器具の動きを監視するステップ、および
前記器具の動きの要求が前記器具を前記立入禁止区域内に移すことになる時期を特定するステップ、
を実行する指示を含むソフトウェアと、
を備える作業機。
【請求項2】
前記コンピュータシステムに連結され、前記器具の位置を記述したデータを前記コンピュータシステムに提供する少なくとも一つのセンサをさらに含む、請求項1に記載の作業機。
【請求項3】
前記少なくとも一つのセンサは、前記作業機の関節点に設置された複数のセンサを含む、請求項2に記載の作業機。
【請求項4】
前記測位システムからのデータと組み合わされた前記複数のセンサからのデータは、ディスプレイが前記器具の位置を表示できるように前記ディスプレイに入力を提供する、請求項3に記載の作業機。
【請求項5】
前記作業機のユーザが視認可能であり、作業場所、および前記作業場所内の作業機に関する位置の地図を表示する、ディスプレイをさらに備える、請求項1に記載の作業機。
【請求項6】
前記ディスプレイは、前記立入禁止区域の視覚的な指示をさらに提供する、請求項5に記載の作業機。
【請求項7】
前記作業機の位置は、反復し更新され、前記作業機のリアルタイム表現と前記作業場所内における前記作業機の相対位置を提供する、請求項5に記載の作業機。
【請求項8】
前記ディスプレイは、タブレット型コンピュータ装置の一部である、請求項5に記載の作業機。
【請求項9】
前記ソフトウェアは、前記コンピュータシステムに解釈されると、前記立入禁止区域内に入る前記器具の動きを防止するステップを行う指示を追加的に含む、請求項1に記載の作業機。
【請求項10】
前記立入禁止区域の大きさは、前記作業機の前記ユーザによりカスタマイズ可能である、請求項1に記載の作業機。
【請求項11】
前記立入禁止区域の大きさは、前記立入禁止区域がその周りに設置される物体に従ってカスタマイズ可能である、請求項1に記載の作業機。
【請求項12】
作業機の器具と地下物体との相対位置を監視するためのコンピュータ実装システムであって、
地下物体に関するデータを含む、作業場所の地図を読み出す第1の処理シーケンスと、
前記作業機に連結された全地球測位システム装置からデータを受信する第2の処理シーケンスと、
前記作業機の場所と配向とを特定するために、前記全地球測位装置からのデータを使用する第3の処理シーケンスと、
前記作業機に取付けられた器具に関するデータを読み出す第4の処理シーケンスと、
前記器具の位置を特定する第5の処理シーケンスと、
前記地下物体に関連付けられた立入禁止区域を記述するデータを読み出す第6の処理シーケンスと、
前記器具の位置を前記立入禁止区域と比較する第7の処理シーケンスと、
を備えるシステム。
【請求項13】
前記地図データをディスプレイに表示する第8の処理シーケンスをさらに備える請求項12に記載のシステム。
【請求項14】
前記第8の処理シーケンスは、前記ディスプレイに表示された前記地図上に前記作業機および前記立入禁止区域を表現することをさらに含む、請求項13に記載のシステム。
【請求項15】
前記作業機は、前記第2の処理シーケンスから受信したデータに従って前記ディスプレイ上に表示される、請求項14に記載のシステム。
【請求項16】
第1の位置から第2の位置への所望する前記作業機の動きを示すデータを受信する第9の処理シーケンスをさらに含む、請求項12に記載のシステム。
【請求項17】
前記第2の位置を前記立入禁止区域と比較する第10の処理シーケンスをさらに含む請求項16に記載のシステム。
【請求項18】
前記第10の処理シーケンスは、前記第2の位置が前記立入禁止区域内である場合に、前記第2の位置への前記作業機の動きを防止するステップをさらに含む、請求項17に記載のシステム。
【請求項19】
前記第4の処理シーケンスは、取り外し可能な前記器具の寸法を記述するデータを読み出すことを含む、請求項12に記載のシステム。
【請求項20】
前記第4の処理シーケンスは、全地球測位システムのデータ源と前記器具との間に配置された少なくとも一つの連携の位置に関するデータを受信することを含む、請求項12に記載のシステム。
【図1】


【図2】

【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−44226(P2013−44226A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−182504(P2012−182504)
【出願日】平成24年8月21日(2012.8.21)
【出願人】(591005165)ディーア・アンド・カンパニー (109)
【氏名又は名称原語表記】DEERE AND COMPANY
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2012−182504(P2012−182504)
【出願日】平成24年8月21日(2012.8.21)
【出願人】(591005165)ディーア・アンド・カンパニー (109)
【氏名又は名称原語表記】DEERE AND COMPANY
【Fターム(参考)】
[ Back to top ]